


BK51x0

BECKHOFF New Automation Technology page 1/4
Beckhoff CANopen devices:
now according to CANopen version 4
New Features + tips for integration in existing networks
Since firmware release C1 the Beckhoff CANopen devices BK5120, BK5110 and LC5100
comply with the CANopen communication profile DS301 Version 4.01 and with the new CiA
recommendation for the LED behaviour DRP303-3. The bus couplers have gained many new
features. Furthermore, the performance of the firmware was significantly improved. The Beckhoff
CANopen devices pass the new CANopen conformance test. Unfortunately the update implies to
some minor functional changes, which generally do not lead to compatibility problems.
1. PDO Behaviour ..........................................................................................................1
1.1 Default Identifier für PDO3 + 4 ...............................................................................1
1.2 Firmware performance improved ...........................................................................2
1.3 PDO event timer now supported ............................................................................ 2
1.4 PDO fully synchronised with I/O-Update ................................................................2
2. LED Behaviour...........................................................................................................2
2.1 LED behaviour now according to DRP303-3..........................................................2
3. Object Dictionary........................................................................................................3
3.1 Identity Object now supported................................................................................3
3.2 0x100E: Guarding-Identifier now Read-Only..........................................................3
3.3 Object 0x1004 removed ......................................................................................... 3
3.4 Time-Out at SYNC monitoring extended................................................................3
4. Network Management................................................................................................3
4.1 Boot-Up message now uses guarding identifier.....................................................3
4.2 Heartbeat now supported ....................................................................................... 4
5. Miscellaneous: ...........................................................................................................4
5.1 Firmware-Update now via CANopen possible........................................................4
5.2 Firmware-Update via serial interface......................................................................4
5.3 Downgrading to firmware version BA .....................................................................4
1. PDO Behaviour
1.1 Default Identifier für PDO3 + 4
New: The Rx- and Tx-PDOs 3+4 now have default identifiers. The same identifiers are used
that so far have been assigned via object 0x5500. The Default mapping was not
changed and the PDOs are only activated if the corresponding process data is present.
Advantage: Now up to 12 analogue input and output channels can be used without the need to
activate the PDOs at boot-up via identifier distribution.
Effects when using new bus couplers in existing networks: none
Update info CANopen version 3 to version 4.01 2002-04-30
BECKHOFF New Automation Technology page 2/4
1.2 Firmware performance improved
New: PDO handling is now significantly quicker (about factor 3-4).
Advantage: Shorter reaction times at input or output changes, higher sample rate.
Effects when using new bus couplers in existing networks: Possibly the bus load increases
– especially when PDOs with analogue input data are communicated event driven (and
“undamped”). Possible action:
1. Use the event timer (see below) to activate cyclic update of the PDOs with analogue
input data (with disabled Global Interrupt Enable 0x6423!) or
2. send these PDOs synchronously (change transmission type from 255 or 254 e.g. to
1,2 or 5). Note: When using the Beckhoff CANopen PCI cards FC510x you can find the
busload directly in a variable.
1.3 PDO event timer now supported
New: TxPDOs: Even if no event has occurred, event driven PDOs are sent once the event
timer has expired. In case of an event the event timer is reset. Note: the event “change
of analogue input“ is switched on or off (default) via object 0x6423. RxPDOs: The event
timer is used as watchdog to monitor the reception of event driven PDOs. In case no
PDO has been received during the configured time span, the bus node enters the error
state.
Advantage: The PDO transmission behaviour can now be adjusted even more individually. E.g.
TxPDOs with analogue inputs can be sent with cycle times independent of the SYNC
rate. The reception of event driven PDOs can be monitored.
Effects when using new bus couplers in existing networks: none
1.4 PDO fully synchronised with I/O-Update
New: If all PDOs are set to synchronous communication (transmission type 0...240) the I/O-
Update is triggered by the reception of the SYNC telegram.
Advantage: Full synchronisation of the I/O behaviour (so far only the communication was
synchronised).
Effects when using new bus couplers in existing networks: none
2. LED Behaviour
2.1 LED behaviour now according to DRP303-3
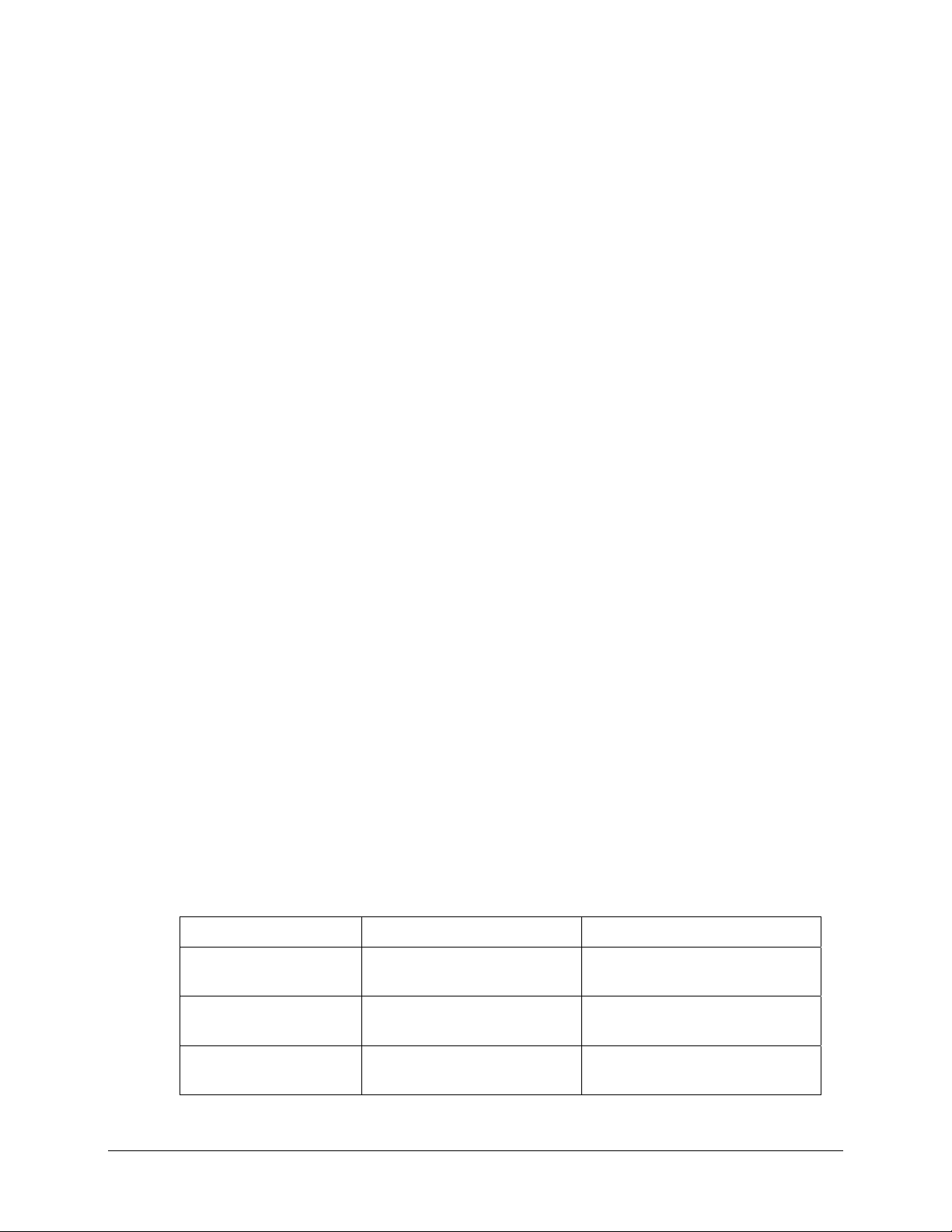
New: The LED behaviour was adapted to the new CiA recommendation DRP303-3. Changes:
Device State LED behaviour old LED behaviour new
Device stopped RUN LED off RUN LED blinks once,
then 1 s break
CAN warning limit
exceeded
ERR LED blinks
continuously
ERR LED blinks once,
then 1 s break
Event Timer: RxPDO
missing
Update info CANopen version 3 to version 4.01 2002-04-30
- ERR LED blinks 4 times,
then 1 s break
 Loading...
Loading...