


PHY
Table of contents
 Loading...
Loading...
Version 2.3
Date: 2014-02-03
Application Note
Slave Controller
Section I – Technology
(Online at http://www.beckhoff.com)
Section II – Register Description
(Online at http://www.beckhoff.com)
Section III – Hardware Description
(Online at http://www.beckhoff.com)
Application Note – PHY Selection Guide
Requirements to Ethernet PHYs used for EtherCAT
Ethernet PHY Examples
EtherCAT over optical links (FX)
DOCUMENT ORGANIZATION
Slave Controller – Application Note PHY Selection Guide II
DOCUMENT ORGANIZATION
The Beckhoff EtherCAT Slave Controller (ESC) documentation covers the following Beckhoff ESCs:
ET1200
ET1100
EtherCAT IP Core for Altera
®
FPGAs
EtherCAT IP Core for Xilinx
®
FPGAs
ESC20
The documentation is organized in three sections. Section I and section II are common for all Beckhoff ESCs,
Section III is specific for each ESC variant.
The latest documentation is available at the Beckhoff homepage (http://www.beckhoff.com).
Section I – Technology (All ESCs)
Section I deals with the basic EtherCAT technology. Starting with the EtherCAT protocol itself, the frame
processing inside EtherCAT slaves is described. The features and interfaces of the physical layer with its two
alternatives Ethernet and EBUS are explained afterwards. Finally, the details of the functional units of an ESC
like FMMU, SyncManager, Distributed Clocks, Slave Information Interface, Interrupts, Watchdogs, and so on,
are described.
Since Section I is common for all Beckhoff ESCs, it might describe features which are not available in a specific
ESC. Refer to the feature details overview in Section III of a specific ESC to find out which features are
available.
Section II – Register Description (All ESCs)
Section II contains detailed information about all ESC registers. This section is also common for all Beckhoff
ESCs, thus registers, register bits, or features are described which might not be available in a specific ESC.
Refer to the register overview and to the feature details overview in Section III of a specific ESC to find out
which registers and features are available.
Section III – Hardware Description (Specific ESC)
Section III is ESC specific and contains detailed information about the ESC features, implemented registers,
configuration, interfaces, pinout, usage, electrical and mechanical specification, and so on. Especially the
Process Data Interfaces (PDI) supported by the ESC are part of this section.
Additional Documentation
Application notes and utilities like pinout configuration tools for ET1100/ET1200 can also be found at the
Beckhoff homepage.
DOCUMENT HISTORY
Version
Comment
1.1pre
First preliminary release
1.2
Ethernet PHY requirements revised (e.g., link loss reaction time)
Added Micrel KSZ8001L
Added National Semiconductor DP83848, DP83849, and DP83640
Editorial changes
1.3
Added restriction to enhanced link configuration: RX_ER has to be asserted
outside of frames (IEEE802 optional feature)
Removed National Semiconductor DP83848 and DP83849 temporarily for
further examination
1.4
Updated/clarified PHY requirements, PHY link loss reaction time is mandatory
Added National Semiconductor DP83848, DP83849 with comments
Added PHYs which require Enhanced Link detection to be activated
Editorial changes
1.5
PHY startup should not rely on MDC clocking
Added Micrel KSZ8041NL/TL Rev. A4 to list of example Ethernet PHYs for
EtherCAT with Enhanced Link Detection requirement
ESD tolerance and baseline wander compensation recommendations added
Editorial changes
1.6
Completely revised and enhanced compatibility table
Editorial changes
1.7
Added restrictions for ET1100/ET1200 and PHYs which require Enhanced Link
Detection: PHY address offset must be 0
PHY address offset for Teridian PHYs and Micrel KSZ8041 corrected
1.8
Added Micrel KSZ8051 PHYs
Link loss reaction time of Broadcom BCM5241is higher than data sheet reports
Clarified suitability of some Micrel/National Semiconductor PHYs for ET1100,
ET1200
Changed footnote: Microchip PIC10 is expected to be not suitable for
management address conversion during an access (PIC10 remains suitable for
adding an extra MCLK cycle)
2.0
Micrel KSZ8051: update to rev. A2
Micrel KSZ8721: LED1 speed behavior comments added
Texas Instruments (formerly National Semiconductor) DP83848/DP83849
comment on clock supply added
Renesas µPD60610, µPD60611, µPD60620, µPD60621 added
SMSC LAN8700 added
STMicroelectronics STE802RT1A/B PHYs added
Texas Instruments DP83620/ DP83630 added
Added chapter about EtherCAT over optical links
Added chapter about Gigabit Ethernet PHYs
Enhanced recommendations for Ethernet PHYs
Added recommendations to FX transceivers used for EtherCAT
2.1
Added Texas Instruments TLK105, TLK106, and TLK110
Added Micrel KSZ8081MNX,KSZ8081 MLX
Removed Micrel KSZ8721: not recommended for new designs by Micrel (Micrel
recommends KSZ8051 or KSZ8081 instead)
Renesas µPD60610, µPD60611, µPD60620, µPD60621 updated
Added IC Plus Corp. IP101G
IEEE802.3az Energy Efficient Ethernet must not be used
Added required PHY signals table
Updated to ET1100-0003/ET1200 -0003
Trademarks
Beckhoff
®
, TwinCAT
®
, EtherCAT
®
, Safety over EtherCAT
®
, TwinSAFE
®
and XFC
®
are registered trademarks of and licensed by
Beckhoff Automation GmbH. Other designations used in this publication may be trademarks whose use by third parties for their
own purposes could violate the rights of the owners.
Patent Pending
The EtherCAT Technology is covered, including but not limited to the following German patent applications and patents:
DE10304637, DE102004044764, DE102005009224, DE102007017835 with corresponding applications or registrations in
various other countries.
Disclaimer
The documentation has been prepared with care. The products described are, however, constantly under development. For that
reason the documentation is not in every case checked for consistency with performance data, standards or other
characteristics. In the event that it contains technical or editorial errors, we retain the right to make alterations at any time and
without warning. No claims for the modification of products that have already been supplied may be made on the basis of the
data, diagrams and descriptions in this documentation.
Copyright
© Beckhoff Automation GmbH 02/2014.
The reproduction, distribution and utilization of this document as well as the communication of its contents to others without
express authorization are prohibited. Offenders will be held liable for the payment of damages. All rights reserved in the event of
the grant of a patent, utility model or design.
CONTENTS
Slave Controller – Application Note PHY Selection Guide III
Version
Comment
2.2
Update to EtherCAT IP Core V3.0.2/V3.00c with FX support
RX_ER is required for EtherCAT
Editorial changes
2.3
Renesas µPD60610/µPD60611: Auto-TX-Shift required (data sheet was
updated)
Renesas µPD60610/µPD60611/ µPD60620/µPD60621: MI link detection and
configuration can only be enabled with certain IP Core versions
Texas Instruments TLK105/TLK106/TLK110: MI link detection and configuration
must not be enabled
Micrel PHYs: added notes for an internal pull-up resistor at MCLK pin
Added note for PHYs with Enhanced link detection recommendation
Editorial changes
CONTENTS
1 Overview 1
2 Ethernet PHY Requirements 2
3 PHY Connection 3
3.1 Required Ethernet PHY signals 3
4 Example Ethernet PHYs 4
4.1 Enhanced Link Detection 4
4.2 Auto TX Shift 4
4.3 Example Ethernet PHYs 5
4.4 Examples of Ethernet PHYs assumed to be incompatible with EtherCAT requirements
7
5 EtherCAT over Optical Links (FX) 7
5.1 ESCs with native FX support 7
5.2 ESCs without native FX support 7
5.2.1 Standard Link Detection 7
5.2.1.1 Issue: Temporary Enhanced Link Detection while EEPROM is loading
8
5.2.1.2 Minimum solutions with Standard Link Detection 8
5.2.2 Enhanced FX Link Detection 8
5.2.2.1 Proposed solutions with Enhanced Link Detection 9
6 Gigabit Ethernet PHYs 9
7 Appendix 9
7.1 Support and Service 9
7.1.1 Beckhoff’s branch offices and representatives 9
7.2 Beckhoff Headquarters 9
Overview
Slave Controller – Application Note PHY Selection Guide 1
1 Overview
An EtherCAT Slave Controller (ESC) takes care of the EtherCAT communication as an interface between the
EtherCAT fieldbus (Ethernet) and the slave application. EtherCAT uses standard Fast Ethernet. Transmission
speed for EtherCAT is fixed to 100 Mbit/s with Full Duplex communication. EtherCAT Slave Controllers process
Ethernet frames on the fly.
This application note provides an overview of the requirements to Ethernet PHYs used for EtherCAT devices.
An example list of Ethernet PHYs currently expected to be suitable for EtherCAT is also provided.
This application note applies to the following Beckhoff EtherCAT Slave Controllers:
ET1200-0003
ET1100-0003
EtherCAT IP Core for Altera
®
/Xilinx
®
FPGAs V3.0.2/V3.00c and later
ESC10/20
Refer to the ESC data sheets for further information. The ESC data sheets are available from the Beckhoff
homepage (http://www.beckhoff.com).
DVI
IPC
..
..
DVI
IPC
..
..
DVI
IPC
..
..
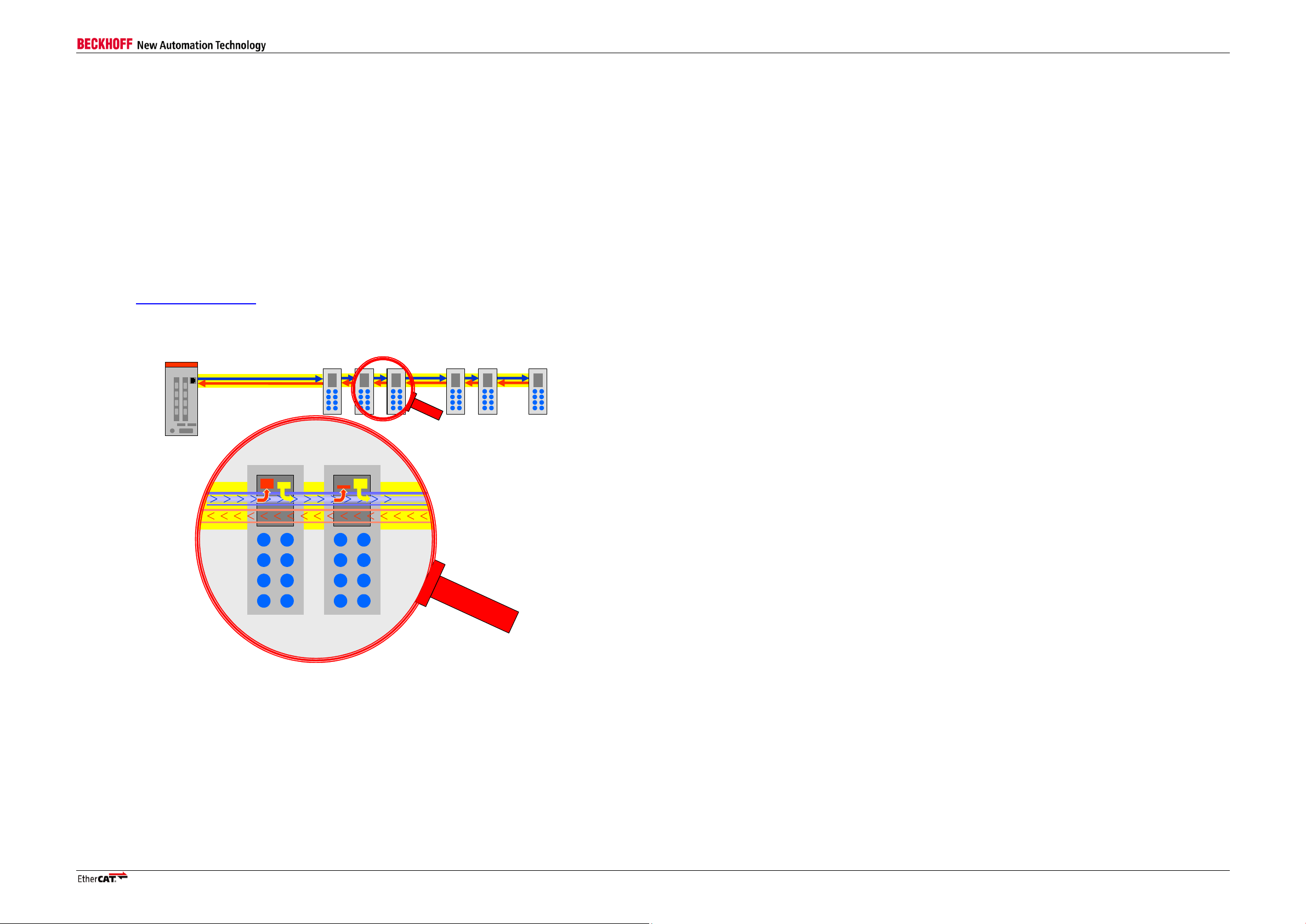
EtherCAT Segment (Slaves)Master
vom Masterfrom Master
to Master
Figure 1: EtherCAT Segment
Loading...