


 Loading...
Loading...Altivar 12
Variable speed drives for asynchronous motors
User manual
05/2010
BBV28581
www.schneider-electric.com

Contents
Contents ____________________________________________________________________________________________________ 3 Important information __________________________________________________________________________________________ 4 Before you begin______________________________________________________________________________________________ 5 Documentation structure________________________________________________________________________________________ 7 Software enhancements________________________________________________________________________________________ 8 Steps for setting up (also refer to Quick Start) _______________________________________________________________________ 9 Setup - Preliminary recommendations ____________________________________________________________________________ 10 Drive ratings ________________________________________________________________________________________________ 11 Dimensions and weights_______________________________________________________________________________________ 12 Mounting___________________________________________________________________________________________________ 13 Wiring _____________________________________________________________________________________________________ 16 Power terminals _____________________________________________________________________________________________ 20 Control terminals_____________________________________________________________________________________________ 23 Check list __________________________________________________________________________________________________ 29 Factory configuration _________________________________________________________________________________________ 30 Basic functions ______________________________________________________________________________________________ 31 Programming _______________________________________________________________________________________________ 32 Structure of parameter tables ___________________________________________________________________________________ 35 Function compatibility table ____________________________________________________________________________________ 36 Reference Mode rEF _________________________________________________________________________________________ 37 Monitoring mode MOn ________________________________________________________________________________________ 38 Configuration Mode ConF______________________________________________________________________________________ 44 Configuration Mode - MyMenu __________________________________________________________________________________ 45 Configuration Mode - Complete menu (FULL) ______________________________________________________________________ 47 Maintenance ________________________________________________________________________________________________ 99 Migration ATV11 - ATV12_____________________________________________________________________________________ 100 Diagnostics and Troubleshooting _______________________________________________________________________________ 107 Application notes ___________________________________________________________________________________________ 113 Applicative notes____________________________________________________________________________________________ 116 Wiring ____________________________________________________________________________________________________ 120 Organization tree ___________________________________________________________________________________________ 121 Parameter index ____________________________________________________________________________________________ 122
Energy savings
Speed control process regulating enables significant energy savings, particulary with pump and fan applications. Furthermore some ATV12 functions enable to enhance these savings: [Motor control type] (Ctt) page 57, [Sleep/wake]
(tLS) page 74 and [PID feedback assignment] (PIF) page 72.
BBV28581 05/2010 |
3 |
Important information
NOTICE
Read these instructions carefully, and look at the equipment to become familiar with the device before trying to install, operate, or maintain it. The following special messages may appear throughout this documentation or on the equipment to warn of potential hazards or to call attention to information that clarifies or simplifies a procedure.
The addition of this symbol to a Danger or Warning safety label indicates that an electrical hazard exists, which will result in personal injury if the instructions are not followed.
This is the safety alert symbol. It is used to alert you to potential personal injury hazards. Obey all safety messages that follow this symbol to avoid possible injury or death.
 DANGER
DANGER
DANGER indicates an imminently hazardous situation, which, if not avoided, will result in death or serious injury.
WARNING
WARNING indicates a potentially hazardous situation, which, if not avoided, can result in death, serious injury or equipment damage.
CAUTION
CAUTION indicates a potentially hazardous situation, which, if not avoided, can result in injury or equipment damage.
CAUTION
CAUTION, used without the safety alert symbol, indicates a potentially hazardous situation which, if not avoided, can result in equipment damage.
PLEASE NOTE
The word "drive" as used in this manual refers to the controller portion of the adjustable speed drive as defined by NEC.
Electrical equipment should be installed, operated, serviced, and maintained only by qualified personnel. No responsibility is assumed by Schneider Electric for any consequences arising out of the use of this product.
© 2009 Schneider Electric. All Rights Reserved.
4 |
BBV28581 05/2010 |

Before you begin
Read and understand these instructions before performing any procedure with this drive.

 DANGER
DANGER
HAZARD OF ELECTRIC SHOCK, EXPLOSION, OR ARC FLASH
•Read and understand this manual before installing or operating the Altivar 12 drive. Installation, adjustment, repair, and maintenance must be performed by qualified personnel.
•The user is responsible for compliance with all international and national electrical code requirements with respect to grounding of all equipment.
•Many parts of this drive, including the printed circuit boards, operate at the line voltage. DO NOT TOUCH. Use only electrically insulated tools.
•DO NOT touch unshielded components or terminal strip screw connections with voltage present.
•DO NOT short across terminals PA/+ and PC/– or across the DC bus capacitors.
•Before servicing the drive:
-Disconnect all power, including external control power that may be present.
-Place a “DO NOT TURN ON” label on all power disconnects.
-Lock all power disconnects in the open position.
-WAIT 15 MINUTES to allow the DC bus capacitors to discharge.
-Measure the voltage of the DC bus between the PA/+ and PC/– terminals to ensure that the voltage is less than 42 Vdc.
-If the DC bus capacitors do not discharge completely, contact your local Schneider Electric representative. Do not repair or operate the drive.
•Install and close all covers before applying power or starting and stopping the drive.
Failure to follow these instructions will result in death or serious injury.
 DANGER
DANGER
UNINTENDED EQUIPMENT OPERATION
•Read and understand this manual before installing or operating the Altivar 12 drive.
•Any changes made to the parameter settings must be performed by qualified personnel.
Failure to follow these instructions will result in death or serious injury.
 WARNING
WARNING
DAMAGED DRIVE EQUIPMENT
Do not operate or install any drive or drive accessory that appears damaged.
Failure to follow these instructions can result in death, serious injury, or equipment damage.
BBV28581 05/2010 |
5 |
Before you begin
 WARNING
WARNING
LOSS OF CONTROL
•The designer of any control scheme must
-consider the potential failure modes of control paths and, for certain critical control functions,
-provide a means to achieve a safe state during and after a path failure.
Examples of critical control functions are emergency stop and overtravel stop.
•Separate or redundant control paths must be provided for critical control functions.
•System control paths may include communication links. Consideration must be given to the implications of unanticipated transmission delays or failures of the link.a
Failure to follow these instructions can result in death, serious injury, or equipment damage.
a. For additional information, refer to NEMA ICS 1.1 (latest edition), “Safety Guidelines for the Application, Installation, and Maintenance of Solid State Control” and to NEMA ICS 7.1 (latest edition), “Safety Standards for Construction and Guide for Selection, Installation and Operation of Adjustable-Speed Drive Systems.”
 CAUTION
CAUTION
INCOMPATIBLE LINE VOLTAGE
Before turning on and configuring the drive, ensure that the line voltage is compatible with the supply voltage range shown on the drive nameplate. The drive may be damaged if the line voltage is not compatible.
Failure to follow these instructions can result in injury or equipment damage.
Using motors in parallel
Set Motor control type Ctt page 57 to Std.
CAUTION
RISK OF DAMAGE TO THE MOTOR
Motor thermal protection is no longer provided by the drive. Provide an alternative means of thermal protection on every motor
Failure to follow these instructions can result in equipment damage
6 |
BBV28581 05/2010 |

Documentation structure
The following Altivar 12 technical documents are available on the Schneider Electric website (www.schneider-electric.com) as well as on DVD-ROM (reference VW3A8200).
User manual
This manual describes how to install, commission, operate and program the drive.
Quick Start
The Quick Start describes how to wire and configure the drive to start motor quickly and simply for simple applications. This document is delivered with the drive.
Modbus Communication manual
This manual describes the assembly, connection to the bus or network, signaling, diagnostics, and configuration of the communicationspecific parameters via the 7-segment LED display.
It also describes the communication services of the Modbus protocol.
This manual includes all Modbus addresses. It explains the operating mode specific to communication (state chart).
ATV12P manual
This manual describes the specific features of ATV12P drives.
BBV28581 05/2010 |
7 |

Software enhancements
Since it was first marketed, the Altivar ATV 12 has been equipped with additional functions. Software version V1.1 has now been updated to V1.2. This documentation relates to version V1.2.
The software version appears on the rating plate attached to the side of the drive.
Enhancements made to version V1.2 in comparison to V1.1
•New parameters:
-Sleep threshold Offset SLE. See page 75.
-PI feedback supervision threshold LPI. See page 76.
-PI feedback supervision function time delay tPI. See page 76.
-Maximum frequency detection hysteresis AP0. See page 76.
-PI feedback supervision MPI. See page 76.
-Fallback speed LFF. See page 76.
-Time delay before automatic start for the overload fault FtO. See page 77.
-Time delay before automatic start for the underload fault FtU. See page 78.
-Selecting the operating mode MdE. See page 78.
-Starting frequency of the auxiliary pump FOn. See page 78.
-Time delay before starting the auxiliary pump tOn. See page 78.
-Ramp for reaching the auxiliary pump nominal speed rOn. See page 78.
-Auxiliary pump stopping frequency FOF. See page 78.
-Time delay before the auxiliary pump stop command tOF. See page 79.
-Ramp for auxiliary pump stopping rOF. See page 79.
-Zero flow detection period nFd. See page 79.
-Zero flow detection activation threshold FFd. See page 79.
-Zero flow detection offset LFd. See page 79.
•New menu Pump sub-menu PMP-. See page 77. For pumping applications.
•New quick REMOTE/LOCAL configuration switching using the embedded buttons. See page 34.
8 |
BBV28581 05/2010 |

Steps for setting up (also refer to Quick Start)
1.Receive and inspect the drive
vCheck that the part number printed on the label is the same as that on the
purchase order.
vRemove the Altivar from its packaging and check that it has not been damaged in transit.
2.Check the line voltage
vCheck that the line voltage is compatible with the voltage range of the drive (page 11).
3.Mount the drive
Steps 2 to 4 must |
v |
Mount the drive in accordance with the instructions |
v |
in this document (page 13). |
|
be performed with |
Install any options required. |
|
the power off. |
|
|
|
|
4. Wire the drive (page 20) |
|
|
|
|
|
v Connect the motor, ensuring that its |
|
|
connections correspond to the voltage. |
|
|
v Connect the line supply, after making |
|
|
sure that the power is off. |
|
|
v Connect the control part. |
|
|
5. Configure the drive (page 32) |
|
|
v Apply input power to the drive but |
|
|
do not give a run command. |
|
|
|
|
|
v Set the motor parameters |
|
|
(in Conf mode) only if the factory |
|
|
configuration of the drive is not |
|
|
suitable. |
|
|
v Perform auto-tuning. |
|
|
6. Start |
BBV28581 05/2010 |
9 |
Setup - Preliminary recommendations
Prior to switching on the drive
 DANGER
DANGER
UNINTENDED EQUIPMENT OPERATION
Ensure that all logic inputs are inactive to help prevent an accidental startup.
Failure to follow these instructions will result in death or serious injury.
Prior to configuring the drive
 DANGER
DANGER
UNINTENDED EQUIPMENT OPERATION
•Read and understand this manual before installing or operating the Altivar 12 drive.
•Any changes made to the parameter settings must be performed by qualified personnel.
•Ensure that all logic inputs are inactive to help prevent an accidental startup when modifying parameters.
Failure to follow these instructions will result in death or serious injury.
Using the drive with motor having a different size
The motor could have different rating than drive. In case of smaller motor, there is no specific calculation. The motor current has to be set on Motor thermal current ItH parameter page 94. In case of higher size of motor, possible up to 2 sizes (example is using a 4 kW (5.5 HP) on a 2.2 kW (3 HP) drive) it is necessary to ensure motor current and actual motor power will not pass over nominal power of drive.
Line contactor
CAUTION
RISK OF DAMAGE TO THE DRIVE
•Avoid operating the contactor frequently to avoid premature aging of the filter capacitors.
•Power cycling must be MORE than 60 seconds.
Failure to follow these instructions can result in equipment damage.
Use with a smaller rated motor or without a motor
•In factory settings mode, Output Phase loss OPL page 94 is active (OPL set to YES). To check the drive in a test or maintenance environment without having to switch to a motor with the same rating as the drive (particularly useful in the case of high power drives), deactivate Output Phase loss OPL (OPL set to nO).
•Set Motor control type Ctt page 57 to Std in Motor control menu drC-.
CAUTION
RISK OF DAMAGE TO THE MOTOR
Motor thermal protection will not be provided by the drive if the motor rating current is less than 20% of the rated drive current. Provide an alternative means of thermal protection.
Failure to follow these instructions can result in equipment damage.
10 |
BBV28581 05/2010 |
Drive ratings
Single-phase supply voltage: 100…120 V 50/60 Hz
For three Phase Output 200/240 V motors
Motor |
|
Line supply (input) |
|
|
Drive (output) |
|
Reference |
Size |
||
Power indicated |
Maximum line current |
Apparent |
Power |
Nominal |
Max. transient |
(2) |
(3) |
|||
on plate (1) |
|
|
power |
dissipated |
current |
current for |
|
|
|
|
|
|
at 100 V |
at 120 V |
|
at nominal |
In |
60 s |
2 s |
|
|
|
|
|
|
|
current (1) |
|
|
|
|
|
kW |
HP |
A |
A |
kVA |
W |
A |
A |
A |
|
|
0.18 |
0.25 |
6 |
5 |
1 |
18 |
1.4 |
2.1 |
2.3 |
ATV12H018F1 |
1C1 |
0.37 |
0.5 |
11.4 |
9.3 |
1.9 |
29 |
2.4 |
3.6 |
4 |
ATV12H037F1 |
1C1 |
0.75 |
1 |
18.9 |
15.7 |
3.3 |
48 |
4.2 |
6.3 |
6.9 |
ATV12H075F1 |
2C1 |
Single-phase supply voltage: 200…240 V 50/60 Hz
For three Phase Output 200/240 V motors
Motor |
|
Line supply (input) |
|
|
Drive (output) |
|
Reference |
Size |
||
Power indicated |
Maximum line current |
Apparent |
Power |
Nominal |
Max. transient |
(2) |
(3) |
|||
on plate (1) |
|
|
power |
dissipated |
current |
current for |
|
|
||
|
|
at 200 V |
at 240 V |
|
at nominal |
In |
60 s |
2 s |
|
|
|
|
|
|
|
current (1) |
|
|
|
|
|
kW |
HP |
A |
A |
kVA |
W |
A |
A |
A |
|
|
0.18 |
0.25 |
3.4 |
2.8 |
1.2 |
18 |
1.4 |
2.1 |
2.3 |
ATV12H018M2 |
1C2 |
0.37 |
0.5 |
5.9 |
4.9 |
2 |
27 |
2.4 |
3.6 |
4 |
ATV12H037M2 |
1C2 |
0.55 |
0.75 |
8 |
6.7 |
2.8 |
34 |
3.5 |
5.3 |
5.8 |
ATV12H055M2 |
1C2 |
0.75 |
1 |
10.2 |
8.5 |
3.5 |
44 |
4.2 |
6.3 |
6.9 |
ATV12H075M2 |
1C2 |
1.5 |
2 |
17.8 |
14.9 |
6.2 |
72 |
7.5 |
11.2 |
12.4 |
ATV12HU15M2 |
2C2 |
2.2 |
3 |
24 |
20.2 |
8.4 |
93 |
10 |
15 |
16.5 |
ATV12HU22M2 |
2C2 |
Three-phase supply voltage: 200…240 V 50/60 Hz
For three Phase Output 200/240 V motors
Motor |
|
Line supply (input) |
|
|
Drive (output) |
|
Reference |
Size |
|||
|
|
|
|
|
|
|
|
|
(2) |
(3) |
|
Power indicated |
Maximum line current |
Apparent |
Power |
Nominal |
Max. transient |
||||||
|
|
||||||||||
on plate (1) |
|
|
power |
dissipated |
current |
current for |
|
|
|||
|
|
at 200 V |
at 240 V |
|
at nominal |
In |
60 s |
2 s |
|
|
|
|
|
|
|
|
current (1) |
|
|
|
|
|
|
kW |
HP |
A |
A |
kVA |
W |
A |
A |
A |
|
|
|
0.18 |
0.25 |
2 |
1.7 |
0.7 |
16 |
1.4 |
2.1 |
2.3 |
ATV12H018M3 |
1C3 |
|
0.37 |
0.5 |
3.6 |
3 |
1.2 |
24 |
2.4 |
3.6 |
4 |
ATV12H037M3 |
1C3 |
|
0.75 |
1 |
6.3 |
5.3 |
2.2 |
41 |
4.2 |
6.3 |
6.9 |
ATV12H075M3 |
1C3 |
|
1.5 |
2 |
11.1 |
9.3 |
3.9 |
73 |
7.5 |
11.2 |
12.4 |
ATV12HU15M3 |
2F3 |
|
2.2 |
3 |
14.9 |
12.5 |
5.2 |
85 |
10 |
15 |
16.5 |
ATV12HU22M3 |
2F3 |
|
3 |
4 |
19 |
15.9 |
6.6 |
94 |
12.2 |
18.3 |
20.1 |
ATV12HU30M3 |
3F3 |
|
4 |
5.5 |
23.8 |
19.9 |
8.3 |
128 |
16.7 |
25 |
27.6 |
ATV12HU40M3 |
3F3 |
|
(1)These power ratings are for a switching frequency of 4 kHz, in continuous operation. The |
(2)Reference description, |
||||||||||||||
switching frequency is adjustable from 2 to 16 kHz. |
|
|
|
|
|
example: ATV12HU15M3 |
|||||||||
Above 4 kHz, the drive will reduce the switching frequency if an excessive temperature rise |
|
ATV12: Altivar 12; |
|||||||||||||
occurs. The temperature rise is detected by a probe in the power module. Nonetheless, |
|
H: product on heatsink; |
|||||||||||||
derating should be applied to the nominal drive current if continuous operation above 4 kHz |
|
U15: drive power rating, |
|||||||||||||
is required: |
|
|
|
|
|
|
|
see nCU parameter page 41; |
|||||||
• 10% derating for 8 kHz |
|
|
|
|
|
|
|
M3: drive voltage rating, |
|||||||
• 20% derating for 12 kHz |
|
|
|
|
|
|
|
see UCAL parameter page 41. |
|||||||
• 30% derating for 16 kHz |
|
|
|
|
|
|
|
|
|
|
|
||||
(3)Size description |
|
|
|
|
|
|
|
|
|
|
|
||||
possible values |
|
2 |
|
|
|
possible values |
|
F |
|
possible values |
|
3 |
|
100 V 1 phase |
|
|
|
|
|
|
|
|
|||||||||
|
1 |
|
|
physical size 1 |
|
F |
Flat |
|
1 |
|
|||||
2 |
|
|
physical size 2 |
|
|
C |
Compact |
|
2 |
|
200 V 1 phase |
||||
3 |
|
|
physical size 3 |
|
|
|
|
|
3 |
|
200 V 3 phase |
||||
BBV28581 05/2010 |
11 |
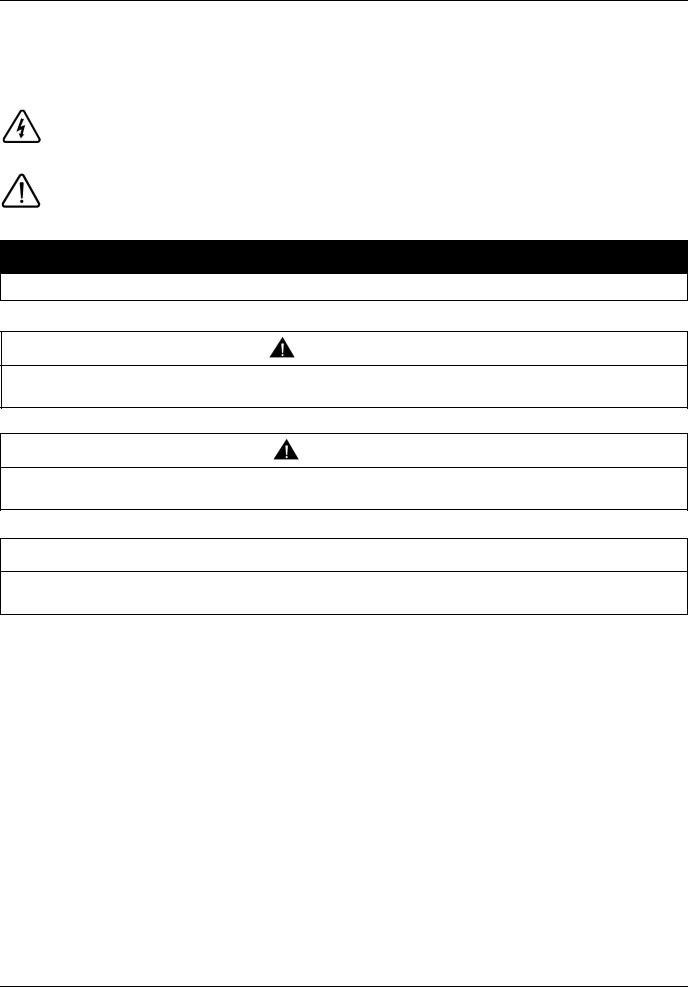
Dimensions and weights
ATV12H018F1, 018M2, 037F1, 037M2, 037M3, 018M2, 018M3, 055M2, 075M2
|
|
|
a |
b |
c |
G |
H |
H1 |
Ø |
For |
Weight |
|
|
ATV12H |
mm |
mm |
mm |
mm |
mm |
mm |
mm |
kg |
|
|
|
screws |
|||||||||
|
|
|
(in.) |
(in.) |
(in.) |
(in.) |
(in.) |
(in.) |
(in.) |
(lb) |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
018F1 |
72 |
142 |
102.2 |
60 |
131 |
143 |
2 x 5 |
M4 |
0.7 |
|
|
018M2 |
|||||||||
|
|
(2.83) |
(5.59) |
(4.02) |
(2.36) |
(5.16) |
(5.63) |
(2 x 0.20) |
(1.5) |
||
|
|
018M3 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
037F1 |
72 |
130 |
121.2 |
60 |
120 |
143 |
2 x 5 |
M4 |
0.8 |
|
|
037M2 |
|||||||||
|
|
(2.83) |
(5.12) |
(4.77) |
(2.36) |
(4.72) |
(5.63) |
(2 x 0.20) |
(1.8) |
||
|
|
037M3 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
055M2 |
72 |
130 |
131.2 |
60 |
120 |
143 |
2 x 5 |
|
0.8 |
|
|
075M2 |
M4 |
||||||||
|
|
(2.83) |
(5.12) |
(5.17) |
(2.36) |
(4.72) |
(5.63) |
(2 x 0.20) |
(1.8) |
||
|
|
075M3 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
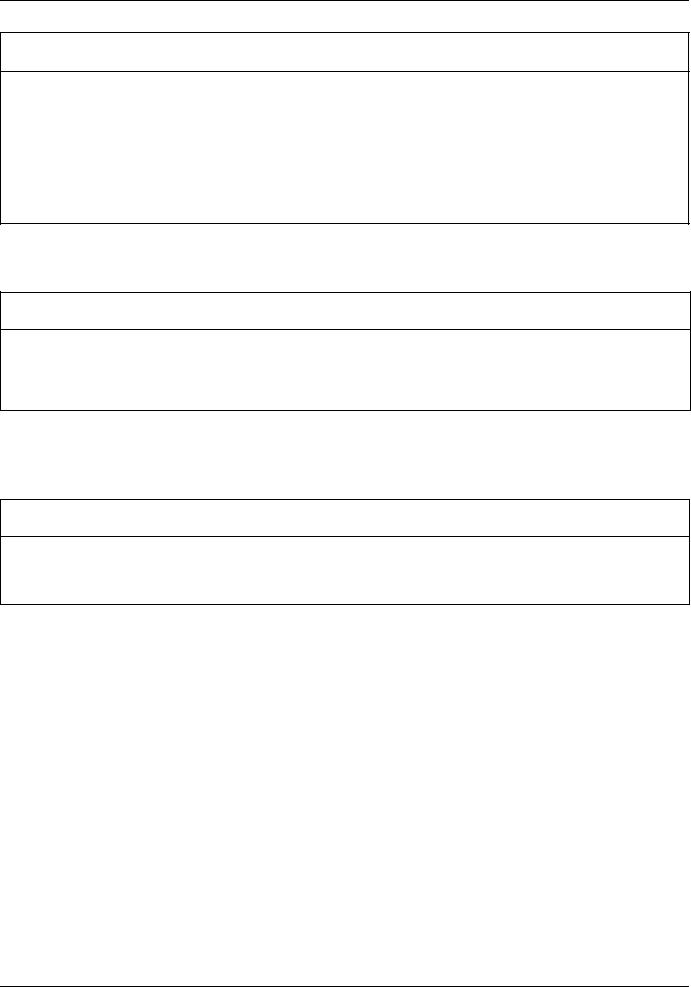
ATV12H075F1, U15M2, U22M2, U15M3, U22M3 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
b |
c |
G |
H |
H1 |
Ø |
For |
Weight |
|
|
ATV12H |
mm |
mm |
mm |
mm |
mm |
mm |
mm |
kg |
|
|
|
screws |
|||||||||
|
|
|
(in.) |
(in.) |
(in.) |
(in.) |
(in.) |
(in.) |
(in.) |
(lb) |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
075F1 |
105 |
130 |
156.2 |
93 |
120 |
142 |
2 x 5 |
M4 |
1.3 |
|
|
(4.13) |
(5.12) |
(6.15) |
(3.66) |
(4.72) |
(5.59) |
(2 x 0.20) |
(2.9) |
||
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U15M2 |
105 |
130 |
156.2 |
93 |
120 |
142 |
2 x 5 |
M4 |
1.4 |
|
|
U22M2 |
(4.13) |
(5.12) |
(6.15) |
(3.66) |
(4.72) |
(5.59) |
(2 x 0.20) |
(3.1) |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U15M3 |
105 |
130 |
131.2 |
93 |
120 |
143 |
2 x 5 |
M4 |
1.2 |
|
|
U22M3 |
(4.13) |
(5.12) |
(5.17) |
(3.66) |
(4.72) |
(5.63) |
(2 x 0.20) |
(2.6) |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
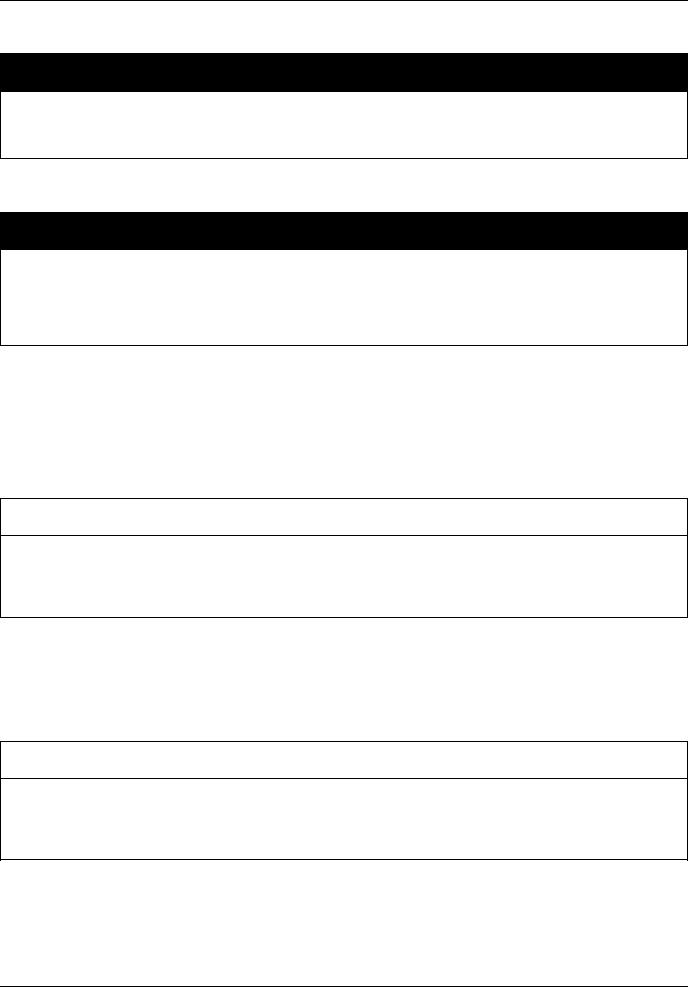
ATV12HU30M3, U40M3 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
b |
c |
G |
H |
H1 |
Ø |
For |
Weight |
|
|
ATV12H |
mm |
mm |
mm |
mm |
mm |
mm |
mm |
kg |
|
|
|
screws |
|||||||||
|
|
|
(in.) |
(in.) |
(in.) |
(in.) |
(in.) |
(in.) |
(in.) |
(lb) |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U30M3 |
140 |
170 |
141.2 |
126 |
159 |
184 |
4 x 5 |
M4 |
2.0 |
|
|
U40M3 |
(5.51) |
(6.69) |
(5.56) |
(4.96) |
(6.26) |
(7.24) |
(2 x 0.20) |
(4.4) |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
12 |
BBV28581 05/2010 |
Mounting
Mounting and temperature conditions
mm |
|
|
Install the unit vertically, at ± 10°. |
(2 in) |
|
Do not place it close to heating elements. |
|
≥ 50 |
|
||
|
Leave sufficient free space to ensure that the air required for cooling purposes can circulate from the bottom to the |
||
|
|
|
top of the unit. |
≥ d |
|
≥ d |
Free space in front of unit: 10 mm (0.4 in.) minimum. |
|
|
|
|
|
|
|
We recommend that the drive is installed on a dissipative surface. |
≥ 50 mm |
(2 in) |
|
|
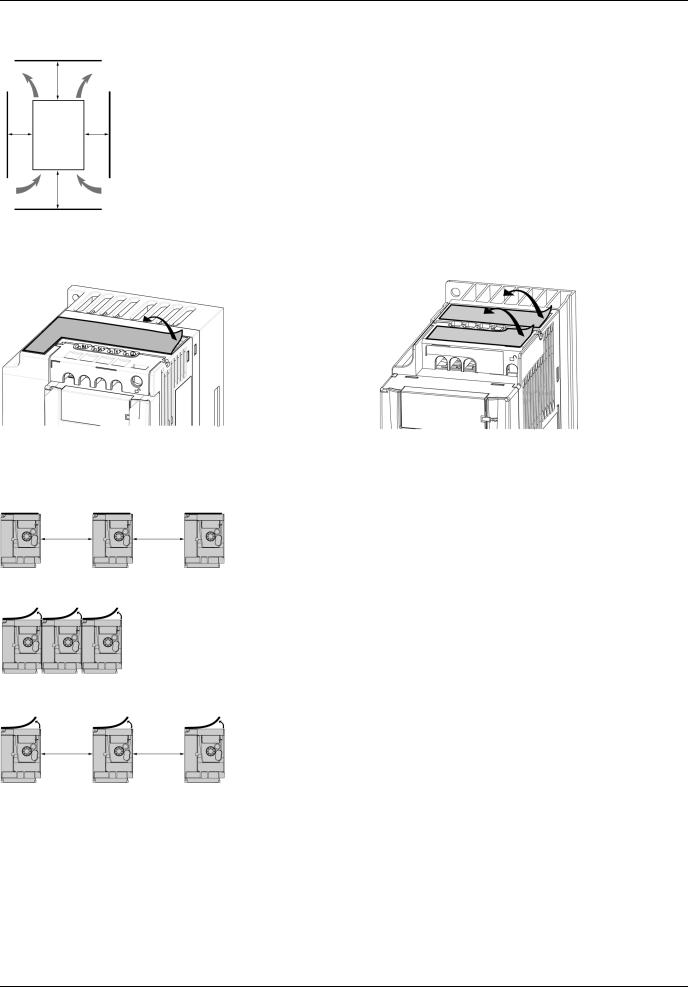
Removing the vent cover(s)
Mounting types
Type A mounting
≥ 50 mm |
≥ 50 mm |
(2 in.) |
(2 in.) |
Free space ≥ 50 mm (2 in.) on each side, with vent cover fitted. Mounting type A is suitable for drive operation at surrounding air temperature less than or equal to 50°C (122°F).
Type B mounting
Drives mounted side-by-side, vent cover should be removed.
Type C mounting
≥ 50 mm |
≥ 50 mm |
Free space ≥ |
50 mm (2 in.) on each side. Vent cover should be removed for operation at |
|
(2 in.) |
(2 in.) |
|||
surrounding air temperature above 50°C (122°F). |
||||
|
|
|||
With these types of mounting, the drive can be used up to an ambient temperature of 50°C (122°F), with a switching frequency of 4 kHz. Fanless drives need derating.
BBV28581 05/2010 |
13 |
Mounting
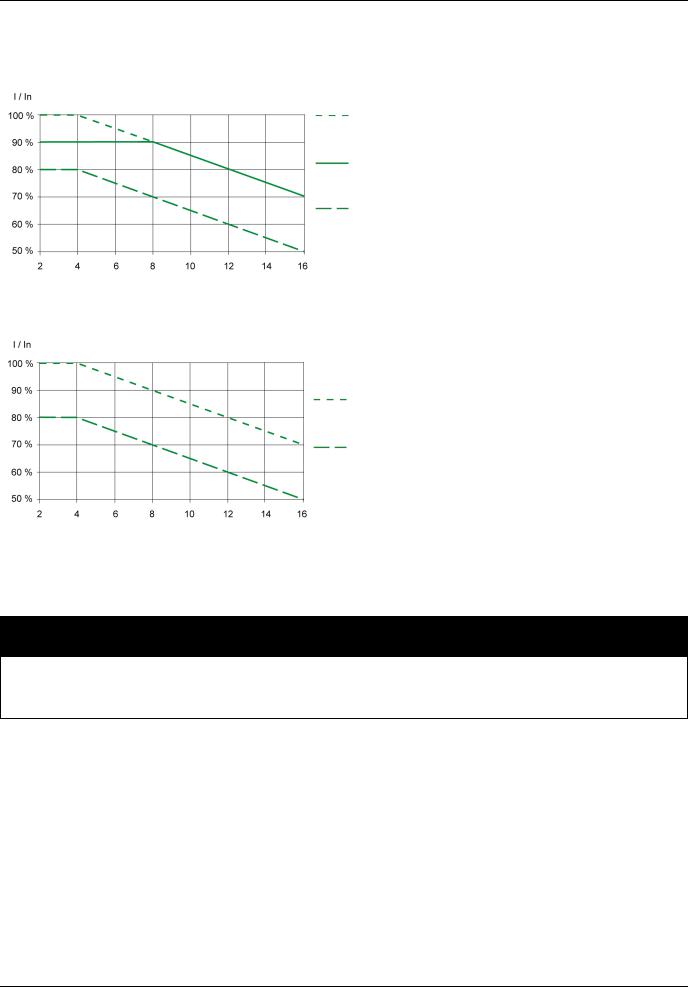
Derating curves
Derating curves for the nominal drive current (In) as a function of temperature, switching frequency and mounting type.
ATV12H0ppM2, ATV12H0ppM3, ATV12H018F1 to ATV12H037F1
40°C (104°F) mounting types A and C
50°C (122°F) mounting type C with metal plate 40°C (104°F) mounting type B
60°C (140°F) mounting type C with metal plate
Switching frequency in kHz
ATV12HUppM2, ATV12H075F1, ATV12HU15M3 to ATV12HU40M3
50°C (122°F) mounting types A, B and C
60°C (140°F) mounting types A, B and C
Switching frequency in kHz
For intermediate temperatures (e.g. 55°C (131°F)), interpolate between two curves.
Bus voltage measurement procedure

 DANGER
DANGER
HAZARD OF ELECTRIC SHOCK, EXPLOSION, OR ARC FLASH
Read and understand the precautions in “Before you begin” on page 5 before performing this procedure.
Failure to follow these instructions will result in death or serious injury.
14 |
BBV28581 05/2010 |
Mounting
Installing the EMC plates
EMC mounting plate: size 1 VW3A9523, size 2 VW3A9524 or size 3 VW3A9525 to be ordered separately
Mount the EMC mounting plate to the holes in the ATV12 using the 2 screws supplied, as shown in the drawings below.
Size 1, plate reference VW3A9523: ATV12H018F1, ATV12H037F1, ATV12P037F1, ATV12H018M2, ATV12p0ppM2, ATV12p0ppM3
1
 1
1
2
2
2 |
2 |
Size 2, plate reference VW3A9524: ATV12H075F1, ATV12HUppM2, ATV12pU15M3, ATV12pU22M3
1.2 mounting screws
2.4 x M4 screws for attaching EMC clamps
Size 3, plate reference VW3A9525: ATV12pU30M3 and ATV12pU40M3
1 |
1 |
1 |
|
|
|
2 |
2 |
2 |
|
||
2 |
2 |
|
|
|
|
|
|
2 |
1
2
2
BBV28581 05/2010 |
15 |
Wiring
Recommendations
Keep the power cables separate from control circuits with low-level signals (detectors, PLCs, measuring apparatus, video, telephone). Always cross control and power cables at 90° if possible.
Power and circuit protection
Follow wire size recommendations according to local codes and standards.
Before wiring power terminals, connect the ground terminal to the grounding screws located below the output terminals (see Access to the motor terminals if you use ring terminals, page 21.
The drive must be grounded in accordance with the applicable safety standards. ATV12ppppM2 drives have an internal EMC filter, and as such the leakage current is over 3.5 mA.
When upstream protection by means of a "residual current device" is required by the installation standards, a type A circuit breaker should be used for single-phase drives and type B for 3-phase drives. Choose a suitable model incorporating:
•HF current filtering
•A time delay which prevents tripping caused by the load from stray capacitance on power-up. The time delay is not possible for 30 mA devices. In this case, choose devices with immunity against accidental tripping, for example RCDs with SI type leakage current protection.
If the installation includes several drives, provide one "residual current device" per drive.
Control
For control and speed reference circuits, we recommend using shielded twisted cables with a pitch of between 25 and 50 mm (1 and 2 in.), connecting the shield to ground as outlined on page 26.
Length of motor cables
For motor cable lengths longer than 50 m (164 ft) for shielded cables and longer than 100 m (328 ft) for unshielded cables, please use motor chokes.
For accessory part numbers, please refer to the catalog.
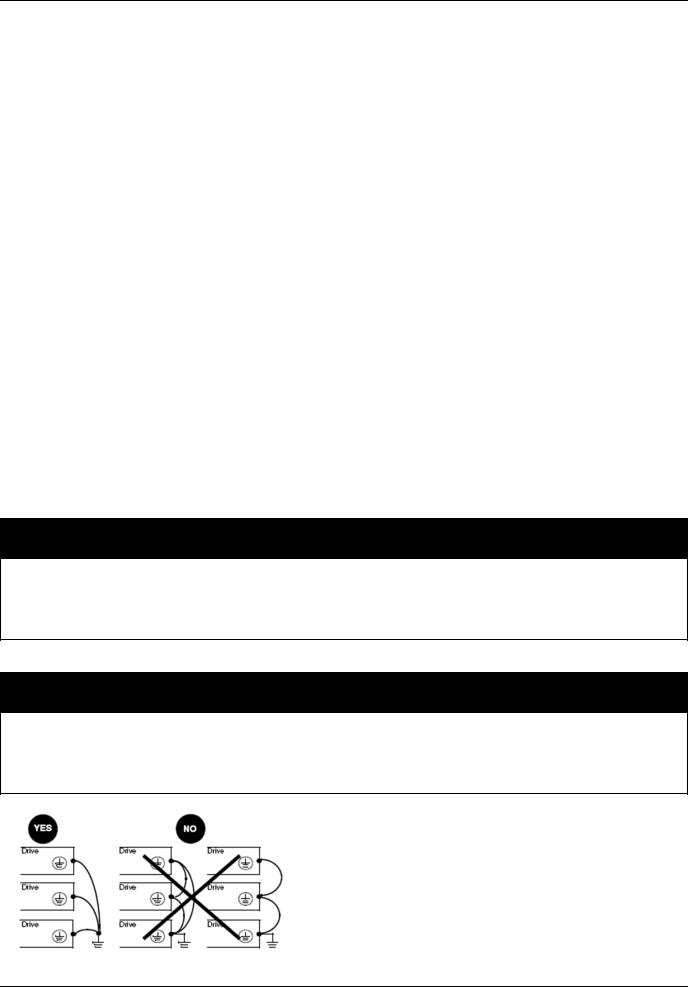
Equipment grounding
Ground the drive according to local and national code requirements. A minimum wire size of 10 mm² (6 AWG) may be required to meet standards limiting leakage current.
.

 DANGER
DANGER
HAZARD OF ELECTRIC SHOCK, EXPLOSION, OR ARC FLASH
•The drive panel must be properly grounded before power is applied.
•Use the provided ground connecting point as shown in the figure below.
Failure to follow these instructions will result in death or serious injury.

 DANGER
DANGER
ATV12H075F1, ATV12H075M2 AND ATV12H075M3 - GROUND CONTINUITY HAZARD
An anodized heatsink can create an insulation barrier to the mounting surface. Ensure that you follow the recommended grounding connections.
Failure to follow these instructions will result in death or serious injury.
• Ensure that the resistance of the ground is one ohm or less.
• When grounding several drives, you must connect each one directly, as shown in the figure to the left.
• Do not loop the ground cables or connect them in series.
16 |
BBV28581 05/2010 |

Wiring
 WARNING
WARNING
RISK OF DRIVE DESTRUCTION
•The drive will be damaged if input line voltage is applied to the output terminals (U/T1,V/T2,W/T3).
•Check the power connections before energizing the drive.
•If replacing another drive, verify that all wiring connections to the drive comply with wiring instructions in this manual.
Failure to follow these instructions can result in death, serious injury or equipment damage.
 WARNING
WARNING
INADEQUATE OVERCURRENT PROTECTION
•Overcurrent protective devices must be properly coordinated.
•The Canadian Electrical Code and the National Electrical Code require branch circuit protection. Use the fuses recommended in this manual, page 121.
•Do not connect the drive to a power feeder whose short-circuit capacity exceeds the drive short-circuit current rating listed in this manual, page 121.
Failure to follow these instructions can result in death, serious injury or equipment damage.
BBV28581 05/2010 |
17 |
Wiring
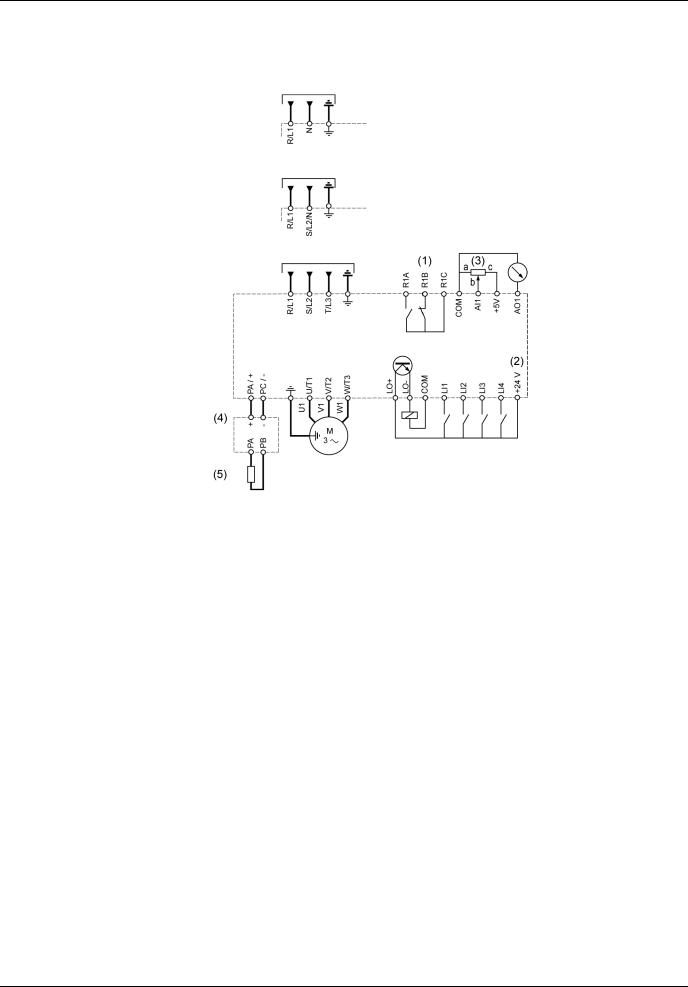
General wiring diagram
ATV12ppppF1 |
Single-phase supply 100...120 V |
ATV12ppppM2 |
Single-phase supply 200...240 V |
ATV12ppppM3 |
Three-phase supply 200...240 V |
3-phase |
Source |
motor |
|
(1)R1 relay contacts, for remote indication of the drive status.
(2)Internal + 24 V c. If an external source is used (+ 30 V c maximum), connect the 0 V of the source to the COM terminal, and do not use the + 24 V c terminal on the drive.
(3)Reference potentiometer SZ1RV1202 (2.2 kΩ) or similar (10 kΩ maximum).
(4)Optional braking module VW3A7005
(5)Optional braking resistor VW3A7ppp or other acceptable resistor. See the possible resistor values in the catalog.
Note:
•Use transient voltage surge suppressors for all inductive circuits near the drive or coupled to the same circuit (relays, contactors, solenoid valves, etc).
•The ground terminal (green screw) is located on the opposite side in comparison with its position on the ATV11 (see wiring trap label).
18 |
BBV28581 05/2010 |

Wiring
Wiring labels
ATV12HpppF1
Input 120 V
Output 240 V
ATV12HpppM2
Input 240 V
Output 240 V
ATV12HpppM3
Input 240 V
Output 240 V
BBV28581 05/2010 |
19 |

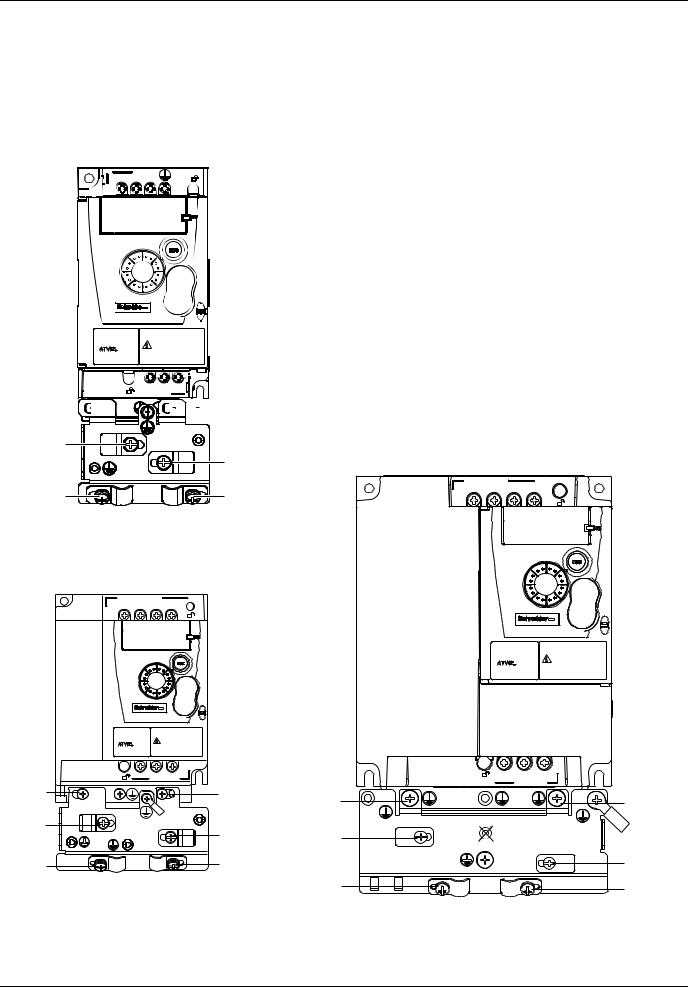
Power terminals
Line supply is at the top of the drive, the motor power supply is at the bottom of the drive. The power terminals can be accessed without opening the wiring trap if you use stripped wire cables.
Access to the power terminals
Access to the terminals if you use stripped wire cables

 DANGER
DANGER
HAZARD OF ELECTRIC SHOCK, EXPLOSION, OR ARC FLASH
Replace the wiring trap before applying power.
Failure to follow these instructions will result in death or serious injury.
CAUTION
RISK OF BODY INJURY
Use pliers to remove snap-off of the wiring trap.
Failure to follow these instructions can result in injury or equipment damage.
Access to the line supply terminals to connect ring terminals
Wiring trap
A)IT jumper on ATV12ppppM2
B)Grounding screws located below the output terminals.
20 |
BBV28581 05/2010 |
Power terminals
Access to the motor terminals if you use ring terminals
Characteristics and functions of power terminals
Terminal |
Function |
For ATV12 |
t |
Ground terminal |
All ratings |
|
|
|
R/L1 - S/L2/N |
Power supply |
1-phase 100…120 V |
|
|
|
R/L1 - S/L2/N |
|
1-phase 200…240 V |
|
|
|
R/L1 - S/L2 - T/L3 |
|
3-phase 200…240 V |
|
|
|
PA/+ |
+ output (dc) to the braking module DC Bus (visible part on wiring trap) |
All ratings |
|
|
|
PC/- |
– output (dc) to the braking module DC Bus (visible part on wiring trap) |
All ratings |
|
|
|
PO |
Not used |
|
|
|
|
U/T1 - V/T2 - W/T3 |
Outputs to the motor |
All ratings |
|
|
|
BBV28581 05/2010 |
21 |

Power terminals
Arrangement of the power terminals
ATV12H 018F1, 037F1, 0ppM2, 0ppM3 |
|
|
|
|
|
Applicable wire |
Recommended |
Tightening |
|
|
|
|||
|
ATV12H |
size (1) |
wire size (2) |
torque (3) |
|
|
|
|
|
|
|
mm² (AWG) |
mm² (AWG) |
N·m (lb.in) |
|
|
|
|
|
|
018F1 |
|
|
|
|
037F1 |
2 to 3.5 |
2 |
0.8 to 1 |
|
0ppM2 |
(14 to 12) |
(14) |
(7.1 to 8.9) |
|
0ppM3 |
|
|
|
|
|
|
|
|
ATV12H 075F1, UppM2, U15M3, U22M3 |
|
|
|
|
|
|
Applicable |
Recommended |
Tightening |
||
|
|
|
|||
|
|
ATV12H |
wire size (1) |
wire size (2) |
torque (3) |
|
|
|
|
|
|
|
|
|
mm² (AWG) |
mm² (AWG) |
N·m (lb.in) |
|
|
|
|
|
|
|
|
075F1 |
3.5 to 5.5 |
5.5 |
|
|
|
UppM2 |
(12 to 10) |
(10) |
1.2 to 1.4 |
|
|
U15M3 |
2 to 5.5 |
2 (14) for U15M3 |
(10.6 to 12.4) |
|
|
|
|||
|
|
U22M3 |
(14 to 10) |
3.5 (12) for U22M3 |
|
|
|
|
|
|
|
ATV12H U30M3, U40M3 |
|
|
|
|
|
Applicable |
Recommended |
Tightening |
|
|
|
|||
|
ATV12H |
wire size (1) |
wire size (2) |
torque (3) |
|
|
|
|
|
|
|
mm² (AWG) |
mm² (AWG) |
N·m (lb.in) |
|
|
|
|
|
|
U30M3 |
5.5 (10) |
5.5 (10) |
1.2 to 1.4 |
|
U40M3 |
(10.6 to 12.4) |
||
|
|
|
||
|
|
|
|
|
(1)The value in bold corresponds to the minimum wire gauge to permit secureness. (2)75°C (167 °F) copper cable (minimum wire size for rated use) (3)Recommended to maximum value.
22 |
BBV28581 05/2010 |
Control terminals
Keep the control circuits away from the power cables. For control and speed reference circuits, we recommend using shielded twisted cables with a pitch of between 25 and 50 mm (1 and 2 in.), connecting the shielding as outlined on page 26.
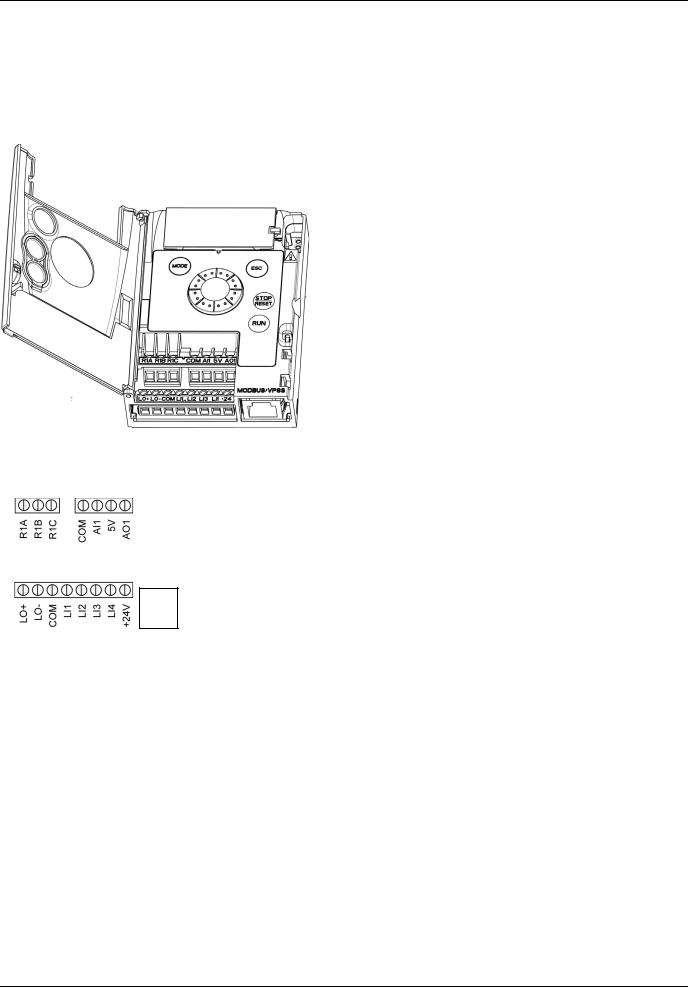
Access to the control terminals
To access the control terminals, open the cover.
Note: For information regarding HMI button functions, see "HMI description" on page 32.
 It is possible to lock the cover with a lead seal.
It is possible to lock the cover with a lead seal.
Arrangement of the control terminals
RJ45
Note: To connect cables, use a slotted screwdriver 0.6 x 3.5.
R1A |
Normally open (NO) contact of the relay |
R1B |
Normally closed (NC) contact of the relay |
R1C |
Common pin of the relay |
COM |
COMmon of analog and logic I/Os |
AI1 |
Analog Input |
5V |
+5VDC supply provided by the drive |
AO1 |
Analog Output |
LO+ |
Logic Output (collector) |
LO- |
Common of the Logic Output (emitter) |
COM |
COMmon of analog and logic I/Os |
LI1 |
Logic Input |
LI2 |
Logic Input |
LI3 |
Logic Input |
LI4 |
Logic Input |
+24V |
+24 VDC supply provided by the drive |
RJ45 |
Connection for SoMove software, Modbus network or remote display. |
ATV12 Control terminals |
Applicable wire size (1) |
Tightening torque (2) |
|
|
mm² (AWG) |
N·m (lb.in) |
|
|
|
|
|
R1A, R1B, R1C |
0.75 to 1.5 (18 to 16) |
0.5 to 0.6 (4.4 to 5.3) |
|
|
|
||
Other terminals |
0.14 to 1.5 (26 to 16) |
||
|
|||
|
|
|
(1)The value in bold corresponds to the minimum wire gauge to permit secureness. (2)Recommended to maximum value.
BBV28581 05/2010 |
23 |

Control terminals
Characteristics and functions of the control terminals
Terminal |
Function |
Electrical characteristics |
|
R1A |
NO contact of the relay |
Min. switching capacity: |
|
|
|
• 5 mA for 24 V c |
|
R1B |
NC contact of the relay |
Maximum switching capacity: |
|
|
|
• 2 A for 250 V a and for 30 V c on inductive load |
|
|
|
(cos ϕ = 0.4 and L/R = 7 ms) |
|
R1C |
Common pin of the relay |
||
• 3 A for 250 V a and 4 A for 30 V c on resistive load |
|||
|
|
||
|
|
(cos ϕ = 1 and L/R = 0) |
|
|
|
• response time: 30 ms maximum. |
|
|
|
|
|
COM |
Common of analog and logic I/Os |
|
|
|
|
|
|
AI1 |
Voltage or current analog input |
• resolution: 10 bits |
|
|
|
• precision: ± 1% at 25°C (77°F) |
|
|
|
• linearity: ± 0.3% (of full scale) |
|
|
|
• sampling time: 20 ms ± 1 ms |
|
|
|
Analog voltage input 0 to +5 V or 0 to +10 V |
|
|
|
(maximum voltage 30 V) impedance: 30 kΩ |
|
|
|
Analog current input x to y mA, impedance: 250 Ω |
|
|
|
|
|
5V |
+5 VDC power supply for reference potentiometer |
• precision: ± 5% |
|
|
|
• maximum current: 10 mA |
|
|
|
|
|
AO1 |
Voltage or current analog output (collector) |
• resolution: 8 bits |
|
|
|
• precision: ± 1% at 25°C (77°F) |
|
|
|
• linearity: ± 0.3% (of full scale) |
|
|
|
• refresh time: 4 ms (maximum 7 ms) |
|
|
|
Analog voltage output: 0 to +10 V (maximum voltage +1%) |
|
|
|
• minimum output impedance: 470 Ω |
|
|
|
Analog current output: x to 20 mA |
|
|
|
• maximum output impedance: 800 Ω |
|
|
|
|
|
LO+ |
Logic output |
• voltage: 24 V (maximum 30 V) |
|
|
|
• impedance: 1 kΩ, maximum 10 mA (100 mA in open collector) |
|
|
|
• linearity: ± 1% |
|
|
|
• refresh time: 20 ms ± 1 ms. |
|
|
|
|
|
LO- |
Common of the logic output (emitter) |
|
|
|
|
|
|
LI1 |
Logic inputs |
Programmable logic inputs |
|
LI2 |
|
• +24 VDC power supply (maximum 30 V) |
|
LI3 |
|
• impedance: 3.5 kΩ |
|
LI4 |
|
• state: 0 if < 5 V, state 1 if > 11 V in positive logic |
|
|
|
• state: 1 if < 10 V, state 0 if > 16 V or switched off (not connected) |
|
|
|
in negative logic |
|
|
|
• sampling time: < 20 ms ± 1 ms. |
|
|
|
|
|
+24V |
+ 24 VDC supply provided by the drive |
+ 24 VDC -15% +20% protected against short-circuits and |
|
|
|
overloads. |
|
|
|
Maximum customer current available 100 mA |
|
|
|
|
24 |
BBV28581 05/2010 |

Control terminals
Control connection diagrams
The Logic inputs type nPL parameter page 51 is used to adapt the operation of the logic inputs to the technology of the programmable controller outputs.
•Set the parameter to POS for Source operation.
•Set the parameter to nEG for internal Sink operation.
•Set the parameter to EnEG for external Sink operation.
Note: The modification will be taken into account only at the next control power on.
Source - using external supply |
Sink - using external supply |
Source - using internal supply |
Sink - using internal supply |
 DANGER
DANGER
UNINTENDED EQUIPMENT OPERATION
•The accidental grounding of logic inputs configured for Sink Logic can result in unintended activation of drive functions.
•Protect the signal conductors against damage that could result in unintentional conductor grounding.
•Follow NFPA 79 and EN 60204 guidelines for proper control circuit grounding practices.
Failure to follow these instructions will result in death or serious injury.
BBV28581 05/2010 |
25 |
Wiring
Electromagnetic compatibility (EMC)
Note: The high frequency equipotential ground connection between the drive, motor, and cable shielding does not eliminate the need to connect the ground (PE) conductors (green-yellow) to the appropriate terminals on each unit. See Wiring recommendations on page 16.
Principle and precautions
•Grounds between the drive, motor, and cable shielding must have high frequency equipotentiality.
•When using shielded cable for the motor, use a 4-conductor cable so that one wire will be the ground connection between the motor and the drive. The size of the ground conductor must be selected in compliance with local and national codes. The shield can then be grounded at both ends. Metal ducting or conduit can be used for part or all of the shielding length, provided there is no break in continuity.
•When using shielded cable for Dynamic Brake (DB) resistors, use a 3-conductor cable so that one wire will be the ground connection between the DB resistor assembly and the drive. The size of the ground conductor must be selected in compliance with local and national codes. The shield can then be grounded at both ends. Metal ducting or conduit can be used for part or all of the shielding length, provided there is no break in continuity.
•When using shielded cable for control signals, if the cable is connecting equipment that is close together and the grounds are bonded together, then both ends of the shield can be grounded. If the cable is connected to equipment that may have a different ground potential, then ground the shield at one end only to prevent large currents from flowing in the shield. The shield on the ungrounded end may be tied to ground with a capacitor (for example: 10 nF, 100 V or higher) in order to provide a path for the higher frequency noise. Keep the control circuits away from the power circuits. For control and speed reference circuits, we recommend using shielded twisted cables with a pitch of between 25 and 50 mm (0.98 and 1.97 in.) Keep the control circuits away from the power circuits. For control and speed reference circuits, we recommend using shielded twisted cables with a pitch of between 25 and 50 mm (0.98 and 1.97 in.)
•Ensure maximum separation between the power supply cable (line supply) and the motor cable.
•The motor cables must be at least 0.5 m (20 in.) long.
•Do not use surge arresters or power factor correction capacitors on the variable speed drive output.
•If using an additional input filter, it should be mounted as closed as possible to the drive and connected directly to the line supply via an unshielded cable. Link 1 on the drive is via the filter output cable.
•For installation of the optional EMC plate and instructions for meeting IEC 61800-3 standard, refer to the section entitled “Installing the EMC plates” and the instructions provided with the EMC plates.

 DANGER
DANGER
HAZARD OF ELECTRIC SHOCK, EXPLOSION OR ARC FLASH
•Do not expose cable shielding except where connected to ground at the metal cable glands and underneath the grounding clamps.
•Ensure that there is no risk of the shielding coming into contact with live components.
Failure to follow these instructions will result in death or serious injury.
26 |
BBV28581 05/2010 |
Wiring
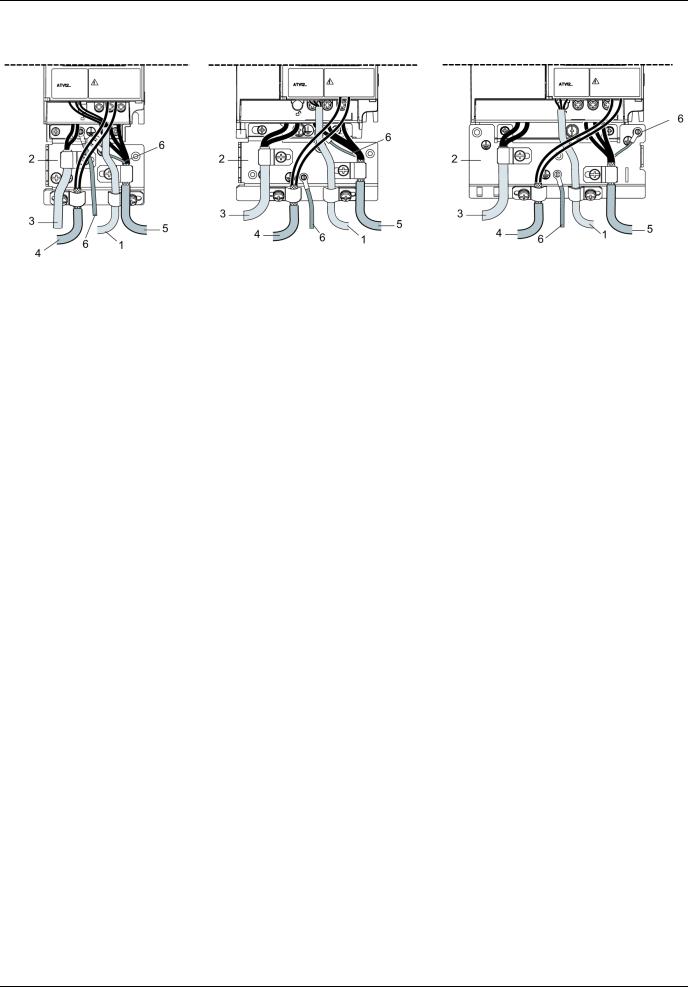
Installation diagram (example)
1.Non-shielded wires for the output of the status relay contacts.
2.Sheet steel grounded casing not supplied with the drive, to be mounted as indicated on the diagram.
3.PA and PC terminals, to the braking module DC bus
4.Shielded cable for connecting the control/signalling wiring.
For applications requiring several conductors, use small cross-sections (0.5 mm2, 20 AWG).
The shielding must be connected to ground at both ends. The shielding must be continuous and intermediate terminals must be in EMC shielded metal boxes.
5.Shielded cable for motor connection with shielding connected to ground at both ends.
This shielding must be continuous, and if there are any intermediate terminals, these must be in an EMC shielded metal box. The motor cable PE grounding conductor (green-yellow) must be connected to the grounded casing.
6.Grounding conductor, cross-section 10 mm² (6 AWG) according to IEC 61800-5-1 standard.
7.Power input (non shielded cable)
Attach and ground the shielding of cables 4 and 5 as close as possible to the drive:
•Expose the shielding.
•Use cable clamps of an appropriate size on the parts from which the shielding has been exposed, to attach them to the casing. The shielding must be clamped tightly enough to the metal plate to ensure correct contact.
•Types of clamp: stainless steel (delivered with the optional EMC plate).
BBV28581 05/2010 |
27 |

Wiring
EMC conditions for ATV12ppppM2
C1 EMC category is reached if length of shielded cable is 5 m (16.4 ft) maximum and Switching frequency SFr page 59 is 4, 8 or 12 kHz. C2 EMC category is reached if length of shielded cable is 10 m (32.8 ft) maximum and Switching frequency SFr is 4, 8 or 12 kHz and if length of shielded cable is 5 m (16.4 ft) maximum for all other values of Switching frequency SFr.
Internal EMC filter on ATV12ppppM2
All ATV12ppppM2 drives have a built-in EMC filter. As a result they exhibit leakage current to ground. If the leakage current creates compatibility problems with your installation (residual current device or other), then you can reduce the leakage current by opening the IT jumper as shown below. In this configuration EMC compliance is not guaranteed.
CAUTION
DRIVE LIFETIME REDUCTION
On ATV12ppppM2 ratings, if the filters are disconnected, the drive’s switching frequency must not exceed 4 kHz. Refer to Switching frequency SFr page 59 for adjustment,
Failure to follow these instructions can result in equipment damage.
Normal
(filter connected)
IT system
(filter disconnected)
28 |
BBV28581 05/2010 |

Check list
Read carefully the safety information in the user manual and the catalogue. Before starting up the drive, please check the following points regarding mechanical and electrical installations, then use and run the drive.
For complete documentation, refer to www.schneider-electric.com.
1.Mechanical installation
•For drive mounting types and recommendations on the ambient temperature, please refer to the Mounting and temperature conditions instructions on page 13.
•Mount the drive vertically as specified, see Mounting and temperature conditions instructions on page 13.
•The use of the drive must be in agreement with the environments defined by the standard 60721-3-3 and according to the levels defined in the catalogue.
•Mount the options required for your application, refer to the catalogue.
2.Electrical installation
•Connect the drive to the ground, see Equipment grounding on page 16.
•Ensure that the input power voltage corresponds to the drive nominal voltage and connect the line supply as shown in General wiring diagram on page 18.
•Ensure you use appropriate input power fuses and circuit breaker on page 121
•Wire the control terminals as required, see Control terminals on page 23. Separate the power cable and the control cable according to the EMC compatibility rules on page 26.
•The ATV12ppppM2 range integrates an EMC filter. The leakage current can be reduced using the IT jumper as explained in the paragraph Internal EMC filter on ATV12ppppM2 on page 28.
•Ensure that motor connections correspond to the voltage (star, delta).
3.Use and run the drive
•Start the drive and you will see Standard motor frequency bFr page 45 at the first power on. Check that the frequency defined by the frequency bFr (the factory setting is 50 Hz) is in accordance with the frequency of the motor, see First power-up on page 34. For the following power on, you will see rdY on the HMI.
•MyMenu (upper part of CONF mode) allows you to configure the drive for most applications (see page 45).
•Factory / recall customer parameter set FCS function page 46 allows you to reset the drive with factory settings.
BBV28581 05/2010 |
29 |
Factory configuration
Drive factory settings
The Altivar 12 is factory-set for the most common operating conditions (motor rating according to drive rating):
•Display: drive ready (rdY) motor stopped or motor frequency reference while running
•Automatic adaptation of the deceleration ramp in the event of overvoltage on braking.
•No automatic restarting after a detected fault is cleared
•Logic inputs:
-LI1: forward (2-wire transitional control)
-LI2, LI3, LI4: no assignment
•Logic output: LO1: no assignment
•Analog input: AI1 (0 to + 5 V) speed reference
•Relay R1: the contact opens in the event of a detected fault (or drive off)
•Analog output AO1: no assignment
Code |
Description |
Value |
page |
bFr |
Standard motor frequency |
50 Hz |
45 |
|
|
|
|
UnS |
Rated motor voltage |
230 V |
57 |
|
|
|
|
ACC |
Acceleration |
3 seconds |
64 |
|
|
|
|
dEC |
Deceleration |
3 seconds |
64 |
|
|
|
|
LSP |
Low speed |
0 Hz |
45 |
|
|
|
89 |
|
|
|
|
HSP |
High speed |
50 Hz |
90 |
|
|
|
|
Ctt |
Motor control type |
Standard U/F law |
57 |
|
|
|
|
UFr |
IR compensation (law U/F) |
100% |
58 |
|
|
|
|
Ith |
Motor thermal current |
equal to nominal motor current (value determined by drive rating) |
94 |
|
|
|
|
SdC1 |
Automatic DC injection current |
0.7 x nominal drive current, for 0.5 seconds. |
67 |
|
|
|
|
SFr |
Switching frequency |
4 kHz |
59 |
|
|
|
|
If the above values are compatible with the application, the drive can be used without changing the settings.
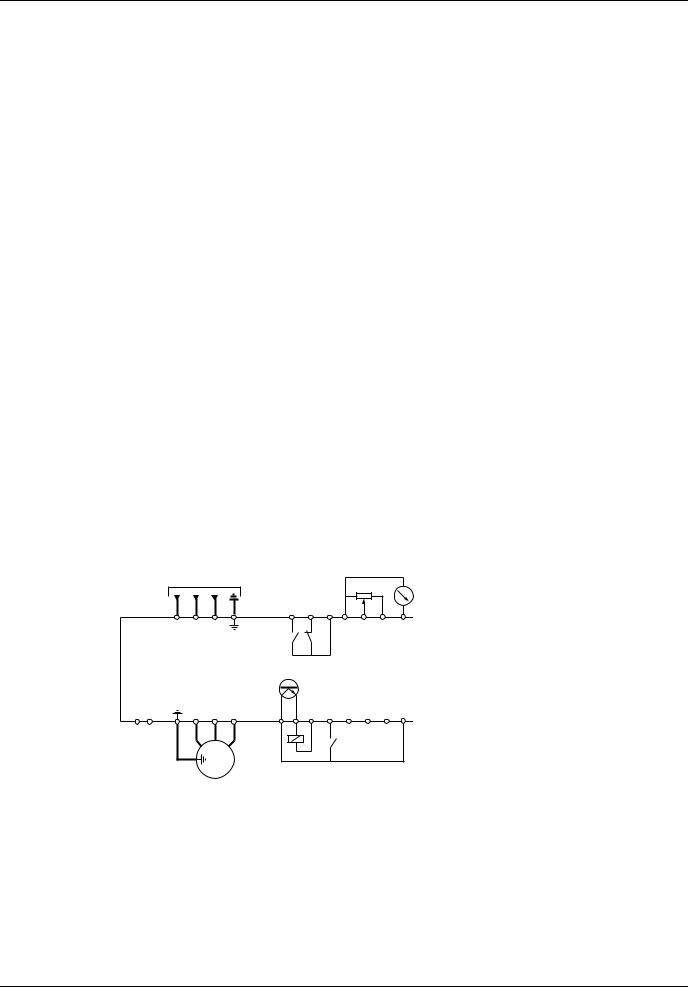
Drive factory wiring diagram
ATV12ppppM3
R1A
R/L1 |
S/L2 |
T/L3 |
PA / + PC / - |
U/T1 |
V/T2 |
W/T3 |
LO+ |
LO- |
U1 |
|
V1 |
W1 |
|
|
|
|
M |
|
|
|
|
|
3 a |
|
|
|
3-phase motor
(1)a (3) c
R1B |
R1C |
b |
|
|
|
COM |
AI1 |
+5V |
AO1 |
|
(4) |
|
|
|
(2) |
COM |
|
|
|
+24 V |
|
LI1 |
LI2 |
LI3 |
LI4 |
Source
(1)R1 relay contacts, for remote indication of the drive status.
(2)Internal + 24 V c. If an external source is used (+ 30 V c maximum), connect the 0 V of the source to the COM terminal, and do not use the + 24 V c terminal on the drive.
(3)Reference potentiometer SZ1RV1202 (2.2 kΩ) or similar (10 kΩ maximum).
(4)Forward
30 |
BBV28581 05/2010 |
Loading...