


 Loading...
Loading...EDKCSCX064
.Ll+
Ä.Ll+ä
Montageanleitung
Mounting Instructions
Instructions de montage
ECS
ECSCSxxx / ECSCPxxx / ECSCMxxx / ECSCAxxx
Achsmodul "Cold−Plate−Technik"
Axis module in cold plate design
Module d’axe en montage sur semelle de refroidissement
l
,Lesen Sie zuerst diese Anleitung, bevor Sie mit den Arbeiten beginnen! Beachten Sie die enthaltenen Sicherheitshinweise.
,Please read these instructions before you start working! Follow the enclosed safety instructions.
,Veuillez lire attentivement cette documentation avant toute action ! Les consignes de sécurité doivent impérativement être respectées.

ECSCA_003A |
Lieferumfang
Position |
Beschreibung |
|
|
Anzahl |
A |
Achsmodul ECSCLxxx |
|
|
1 |
|
|
|
|
|
C |
Beipack mit Befestigungsmaterial |
|
1 |
|
|
|
|
|
|
|
Montageanleitung |
|
|
1 |
|
|
|
|
|
|
Bohrschablone |
|
|
1 |
L Anwendungs−Software: |
S = Speed & Torque |
P = Posi & Shaft |
||
|
|
M = Motion |
A = Application |
|
) Hinweis!
Das Steckverbinder−Set ECSZA000X0B muss gesondert bezogen werden.
Anschlüsse und Schnittstellen
Position |
Beschreibung |
Ausführliche |
|
|
|
|
Informationen |
X23 |
Anschlüsse |
^ 37 |
|
|
l |
DC−Zwischenkreisspannung |
|
|
l |
PE |
|
|
|
|
|
B |
LEDs: Anzeige Status und Störung |
|
|
|
|
|
|
X1 |
Automatisierungs−Interface (AIF) für |
|
|
|
l |
Kommunikationsmodul |
|
|
l |
Bedienmodul (Keypad XT) |
|
|
|
|
|
X2 |
PE−Anschluss AIF |
|
|
|
|
|
|
X3 |
Konfiguration analoger Eingang |
^ 48 |
|
|
|
|
|
X4 |
Anschluss CAN |
^ 56 |
|
|
l MotionBus (CAN) / bei ECSxA: Systembus (CAN) |
|
|
|
l Schnittstelle zur übergeordneten Steuerung |
|
|
X14 |
Anschluss CAN−AUX |
|
|
|
l |
Systembus (CAN) |
|
|
l PC−Schnittstelle/HMI zur Parametrierung und Diagnose |
|
|
X6 |
Anschlüsse |
^ 43 |
|
|
l |
Niederspannungsversorgung |
^ 47 |
|
l |
Digitale Eingänge und Ausgänge |
|
|
l |
Analog−Eingang |
^ 48 |
|
^ 50 |
||
|
l "Sicher abgeschaltetes Moment" (ehem. "Sicherer Halt") |
||
|
|
||
|
|
|
|
S1 |
DIP−Schalter |
|
|
|
l |
CAN−Knotenadresse |
|
|
l |
CAN−Übertragungsrate |
|
|
|
|
|
X7 |
Anschluss Resolver |
^ 61 |
|
|
|
|
|
X8 |
Anschluss Encoder |
^ 62 |
|
|
l |
Inkrementalgeber (TTL−Geber) |
|
|
l |
SinCos−Encoder |
|
|
|
|
|
X25 |
Anschluss Bremsenansteuerung |
^ 41 |
|
|
|
|
|
X24 |
Anschluss Motor |
^ 40 |
|
4 |
l |
EDKCSCX064 DE/EN/FR 4.0 |
Statusanzeigen
LED |
|
Betriebszustand |
Kontrolle |
|
rot |
grün |
|
|
|
aus |
an |
Antriebsregler freigegeben, keine Störung |
|
|
|
|
|
|
|
aus |
blinkt |
Antriebsregler gesperrt (CINH), Einschaltsperre |
Codestelle C0183 |
|
|
|
|
|
|
blinkt |
aus |
Störung/Fehler (TRIP) aktiv |
Codestelle C0168/1 |
|
|
|
|
|
|
blinkt |
an |
Warnung/FAIL−QSP aktiv |
Codestelle C0168/1 |
|
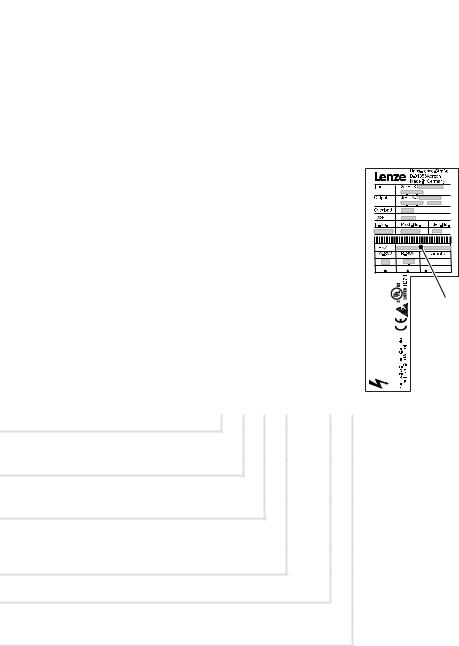
Identifikation
|
|
|
|
|
|
|
|
|
|
|
• |
|
|
|
|
|
|
|
|
|
|
ECS |
C |
x xxx |
C |
4 |
x |
xxx XX xx |
xx |
||||||||||
|
|
||||||||||||||||||
Gerätetyp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Bauform |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E = Standard−Einbaugerät IP20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
D = Durchstoß−Technik (therm. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
separiert) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C = Cold−Plate−Technik |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Applikation |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
S = "Speed and Torque" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
P = "Posi and Shaft" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
M = "Motion" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A = "Application" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Spitzenstrom |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
004 = 4 A |
032 = 32 A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
008 = 8 A |
048 = 48 A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
016 = 16 A |
064 = 64 A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ATTENTION |
L´appareiltensionestsous |
pendant180scoupureaprèsla |
delatensionréseau |
|
|
||||
WARNING |
Deviceisliveupto180s |
afterremoving |
mainsvoltage |
|
Feldbus−Schnittstelle
C = Systembus CAN
Spannungsklasse
4 = 400 V/500 V
Technische Ausführung
B = Standard |
I = für IT−Netze, unverlackt |
V = verlackt |
K= für IT−Netze, verlackt |
Variante
Stand Hardware
1A oder höher
Stand Betriebs−Software (B−SW)
EDKCSCX064 DE/EN/FR 4.0 |
l |
5 |
I Tipp!
Informationen und Hilfsmittel rund um die Lenze−Produkte finden Sie im Download−Bereich unter
http://www.Lenze.com
© 2013 Lenze Automation GmbH, Postfach 10 13 52, D−31763 Hameln, Hans−Lenze−Str. 1, D−31855 Aerzen Ohne besondere schriftliche Genehmigung von Lenze Automation GmbH darf kein Teil dieser Dokumentation vervielfältigt oder Dritten zugänglich gemacht werden.
Wir haben alle Angaben in dieser Dokumentation mit größter Sorgfalt zusammengestellt und auf Übereinstimmung mit der beschriebenen Hard− und Software geprüft. Trotzdem können wir Abweichungen nicht ganz ausschließen. Wir übernehmen keine juristische Verantwortung oder Haftung für Schäden, die dadurch eventuell entstehen. Notwendige Korrekturen werden wir in die nachfolgenden Auflagen einarbeiten.
6 |
l |
EDKCSCX064 DE/EN/FR 4.0 |

Inhalt i
1 |
Über diese Dokumentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
8 |
2 |
Sicherheitshinweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
9 |
2.1Allgemeine Sicherheits− und Anwendungshinweise für
|
|
Lenze−Antriebsregler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
9 |
|
|
2.2 |
Motor thermisch überwachen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
13 |
|
|
|
2.2.1 |
Fremdbelüftete oder selbstgekühlte Motoren . . . . . . . . . |
15 |
|
|
2.2.2 |
Eigenbelüftete Motoren . . . . . . . . . . . . . . . . . . . . . . . . . . . |
17 |
|
2.3 |
Restgefahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
20 |
|
|
2.4 |
Sicherheitshinweise für die Installation nach UL . . . . . . . . . . . . . . . . . |
22 |
|
3 |
Technische Daten |
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
23 |
|
|
3.1 |
Allgemeine Daten und Einsatzbedingungen . . . . . . . . . . . . . . . . . . . |
23 |
|
|
3.2 |
Bemessungsdaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
25 |
|
4 |
Mechanische Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
27 |
||
|
4.1 |
Wichtige Hinweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
27 |
|
|
4.2 |
Montage in Cold−Plate−Technik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
28 |
|
|
|
4.2.1 |
Abmessungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
29 |
|
|
4.2.2 |
Montageschritte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
30 |
5 |
Elektrische Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
31 |
||
5.1EMV−gerechte Installation
|
|
(Aufbau des CE−typischen Antriebssystems) . . . . . . . . . . . . . . . . . . . . |
31 |
|
|
5.2 |
Leistungsanschlüsse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
34 |
|
|
|
5.2.1 |
Anschluss an den DC−Zwischenkreis (+UG, −UG) . . . . . . . . |
37 |
|
|
5.2.2 |
Anschluss Motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
40 |
|
|
5.2.3 |
Anschluss Motorhaltebremse . . . . . . . . . . . . . . . . . . . . . . . |
41 |
|
5.3 |
Steueranschlüsse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
43 |
|
|
|
5.3.1 |
Digitale Eingänge und Ausgänge . . . . . . . . . . . . . . . . . . . . |
47 |
|
|
5.3.2 |
Analog−Eingang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
48 |
|
|
5.3.3 |
Sicher abgeschaltetes Moment . . . . . . . . . . . . . . . . . . . . . . |
50 |
|
5.4 |
Systembus (CAN) verdrahten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
56 |
|
|
5.5 |
Rückführsystem verdrahten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
60 |
|
|
|
5.5.1 |
Anschluss Resolver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
61 |
|
|
5.5.2 |
Anschluss Encoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
62 |
|
|
5.5.3 |
Leitfrequenzeingang/−ausgang |
|
|
|
|
(Encoder−Nachbildung) . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
66 |
6 |
Installation überprüfen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
69 |
||
EDKCSCX064 DE/EN/FR 4.0 |
l |
7 |

1Über diese Dokumentation
1Über diese Dokumentation
Informationen zur Gültigkeit
Diese Dokumentation ist gültig für Achsmodule
ƒECSCS... ˘ "Speed & Torque"
ƒECSCP... ˘ "Posi & Shaft"
ƒECSCM... ˘ "Motion"
ƒECSCA... ˘ "Application"
Zielgruppe
Diese Dokumentation richtet sich an qualifiziertes Fachpersonal nach IEC 60364.
Qualifiziertes Fachpersonal sind Personen, die für die auszuführenden Tätigkeiten bei der Aufstellung, Montage, Inbetriebsetzung und dem Betrieb des Produkts über entsprechende Qualifikationen verfügen.
8 |
l |
EDKCSCX064 DE/EN/FR 4.0 |

Sicherheitshinweise 2
Allgemeine Sicherheits− und Anwendungshinweise für Lenze−Antriebsregler
2 Sicherheitshinweise
2.1Allgemeine Sicherheits− und Anwendungshinweise für Lenze−Antriebsregler
(gemäß Niederspannungsrichtlinie 2006/95/EG)
Zu Ihrer persönlichen Sicherheit
Wenn Sie die folgenden grundlegenden Sicherheitsmaßnahmen missachten, kann dies zu schweren Personenschäden und Sachschäden führen:
ƒDas Produkt ausschließlich bestimmungsgemäß verwenden.
ƒDas Produkt niemals trotz erkennbarer Schäden in Betrieb nehmen.
ƒDas Produkt niemals unvollständig montiert in Betrieb nehmen.
ƒKeine technischen Änderungen am Produkt vornehmen.
ƒNur das für das Produkt zugelassene Zubehör verwenden.
ƒNur Original−Ersatzteile des Herstellers verwenden.
ƒAlle am Einsatzort geltenden Unfallverhütungsvorschriften, Richtlinien und Gesetze beachten.
ƒNur qualifiziertes Fachpersonal die Arbeiten zum Transport, zur Installation, zur Inbetriebnahme und zur Instandhaltung ausführen lassen.
–IEC 364 bzw. CENELEC HD 384 oder DIN VDE 0100 und IEC−Report 664 oder DIN VDE 0110 und nationale Unfallverhütungsvorschriften beachten.
–Qualifiziertes Fachpersonal im Sinne dieser grundsätzlichen Sicherheitshinweise sind Personen, die mit Aufstellung, Montage, Inbetriebsetzung und Betrieb des Produkts vertraut sind und die über die ihrer Tätigkeit entsprechenden Qualifikationen verfügen.
ƒAlle Vorgaben dieser Dokumentation beachten.
–Dies ist Voraussetzung für einen sicheren und störungsfreien Betrieb sowie für das Erreichen der angegebenen Produkteigenschaften.
–Die in dieser Dokumentation dargestellten verfahrenstechnischen Hinweise und Schaltungsausschnitte sind Vorschläge, deren Übertragbarkeit auf die jeweilige Anwendung überprüft werden muss. Für die Eignung der angegebenen Verfahren und Schaltungsvorschläge übernimmt Lenze Automation GmbH keine Gewähr.
ƒLenze−Antriebsregler (Frequenzumrichter, Servo−Umrichter, Stromrichter) und zugehörige Komponenten können während des Betriebs − ihrer Schutzart entsprechend − spannungsführende, auch bewegliche oder rotierende Teile haben. Oberflächen können heiß sein.
–Bei unzulässigem Entfernen der erforderlichen Abdeckung, bei unsachgemäßem Einsatz, bei falscher Installation oder Bedienung besteht die Gefahr von schweren Personen− oder Sachschäden.
–Weitere Informationen entnehmen Sie der Dokumentation.
EDKCSCX064 DE/EN/FR 4.0 |
l |
9 |

2Sicherheitshinweise
Allgemeine Sicherheits− und Anwendungshinweise für Lenze−Antriebsregler
ƒIm Antriebsregler treten hohe Energien auf. Deshalb bei Arbeiten am Antriebsregler unter Spannung immer eine persönliche Schutzausrüstung tragen (Körperschutz, Kopfschutz, Augenschutz, Gehörschutz, Handschutz).
Bestimmungsgemäße Verwendung
Antriebsregler sind Komponenten, die zum Einbau in elektrische Anlagen oder Maschinen bestimmt sind. Sie sind keine Haushaltsgeräte, sondern als Komponenten ausschließlich für die Verwendung zur gewerblichen Nutzung bzw. professionellen Nutzung im Sinne der EN 61000−3−2 bestimmt.
Bei Einbau der Antriebsregler in Maschinen ist die Inbetriebnahme (d. h. die Aufnahme des bestimmungsgemäßen Betriebs) solange untersagt, bis festgestellt wurde, dass die Maschine den Bestimmungen der EG−Richtlinie 2006/42/EG (Maschinenrichtlinie) entspricht; EN 60204 beachten.
Die Inbetriebnahme (d. h. die Aufnahme des bestimmungsgemäßen Betriebs) ist nur bei Einhaltung der EMV−Richtlinie (2004/108/EG) erlaubt.
Die Antriebsregler erfüllen die Anforderungen der Niederspannungsrichtlinie 2006/95/EG. Die harmonisierte Norm EN 61800−5−1 wird für die Antriebsregler angewendet.
Die technischen Daten und die Angaben zu Anschlussbedingungen entnehmen Sie dem Leistungsschild und der Dokumentation. Halten Sie diese unbedingt ein.
Warnung: Die Antriebsregler sind Produkte, die nach EN 61800−3 in Antriebssysteme der Kategorie C2 eingesetzt werden können. Diese Produkte können im Wohnbereich Funkstörungen verursachen. In diesem Fall kann es für den Betreiber erforderlich sein, entsprechende Maßnahmen durchzuführen.
Transport, Einlagerung
Beachten Sie die Hinweise für Transport, Lagerung und sachgemäße Handhabung.
Halten Sie die klimatischen Bedingungen gemäß den technischen Daten ein.
Aufstellung
Sie müssen die Antriebsregler nach den Vorschriften der zugehörigen Dokumentation aufstellen und kühlen.
Die Umgebungsluft darf den Verschmutzungsgrad 2 nach EN 61800−5−1 nicht überschreiten.
Sorgen Sie für sorgfältige Handhabung und vermeiden Sie mechanische Überlastung. Verbiegen Sie bei Transport und Handhabung weder Bauelemente noch ändern Sie Isolationsabstände. Berühren Sie keine elektronischen Bauelemente und Kontakte.
Antriebsregler enthalten elektrostatisch gefährdete Bauelemente, die Sie durch unsachgemäße Handhabung leicht beschädigen können. Beschädigen oder zerstören Sie keine elektrischen Komponenten, da Sie dadurch Ihre Gesundheit gefährden können!
10 |
l |
EDKCSCX064 DE/EN/FR 4.0 |
Sicherheitshinweise 2
Allgemeine Sicherheits− und Anwendungshinweise für Lenze−Antriebsregler
Elektrischer Anschluss
Beachten Sie bei Arbeiten an unter Spannung stehenden Antriebsreglern die geltenden nationalen Unfallverhütungsvorschriften (z. B. VBG 4).
Führen Sie die elektrische Installation nach den einschlägigen Vorschriften durch (z. B. Leitungsquerschnitte, Absicherungen, Schutzleiteranbindung). Zusätzliche Hinweise enthält die Dokumentation.
Die Dokumentation enthält Hinweise für die EMV−gerechte Installation (Schirmung, Erdung, Anordnung von Filtern und Verlegung der Leitungen). Beachten Sie diese Hinweise ebenso bei CE−gekennzeichneten Antriebsreglern. Der Hersteller der Anlage oder Maschine ist verantwortlich für die Einhaltung der im Zusammenhang mit der EMV−Gesetzgebung geforderten Grenzwerte. Um die am Einbauort geltenden Grenzwerte für Funkstöraussendungen einzuhalten, müssen Sie die Antriebsregler in Gehäuse (z. B. Schaltschränke) einbauen. Die Gehäuse müssen einen EMV−gerechten Aufbau ermöglichen. Achten Sie besonders darauf, dass z. B. Schaltschranktüren möglichst umlaufend metallisch mit dem Gehäuse verbunden sind. Öffnungen oder Durchbrüche durch das Gehäuse auf ein Minimum reduzieren.
Lenze−Antriebsregler können einen Gleichstrom im Schutzleiter verursachen. Wird für den Schutz bei einer direkten oder indirekten Berührung an einem 3−phasig versorgten Antriebsregler ein Differenzstromgerät (RCD) verwendet, ist auf der Stromversorgungsseite des Antriebsreglers nur ein Differenzstromgerät (RCD) vom Typ B zulässig. Wird der Antriebsregler 1−phasig versorgt, ist auch ein Differenzstromgerät (RCD) vom Typ A zulässig. Neben der Verwendung eines Differenzstromgerätes (RCD) können auch andere Schutzmaßnahmen angewendet werden, wie z. B. Trennung von der Umgebung durch doppelte oder verstärkte Isolierung oder Trennung vom Versorgungsnetz durch einen Transformator.
Betrieb
Sie müssen Anlagen mit eingebauten Antriebsreglern ggf. mit zusätzlichen Überwachungs− und Schutzeinrichtungen gemäß den jeweils gültigen Sicherheitsbestimmungen ausrüsten (z. B. Gesetz über technische Arbeitsmittel, Unfallverhütungsvorschriften). Sie dürfen die Antriebsregler an Ihre Anwendung anpassen. Beachten Sie dazu die Hinweise in der Dokumentation.
Nachdem der Antriebsregler von der Versorgungsspannung getrennt ist, dürfen Sie spannungsführende Geräteteile und Leistungsanschlüsse nicht sofort berühren, weil Kondensatoren aufgeladen sein können. Beachten Sie dazu die entsprechenden Hinweisschilder auf dem Antriebsregler.
Halten Sie während des Betriebs alle Schutzabdeckungen und Türen geschlossen.
Hinweis für UL−approbierte Anlagen mit eingebauten Antriebsreglern: UL warnings sind Hinweise, die nur für UL−Anlagen gelten. Die Dokumentation enthält spezielle Hinweise zu UL.
EDKCSCX064 DE/EN/FR 4.0 |
l |
11 |

2Sicherheitshinweise
Allgemeine Sicherheits− und Anwendungshinweise für Lenze−Antriebsregler
Sicherheitsfunktionen
Bestimmte Varianten der Antriebsregler unterstützen Sicherheitsfunktionen (z. B. "Sicher abgeschaltetes Moment", ehem. "Sicherer Halt") nach den Anforderungen der EG−Richtlinie 2006/42/EG (Maschinenrichtlinie). Beachten Sie unbedingt die Hinweise in der Dokumentation zur integrierten Sicherheitstechnik.
Wartung und Instandhaltung
Die Antriebsregler sind wartungsfrei, wenn die vorgeschriebenen Einsatzbedingungen eingehalten werden.
Entsorgung
Metalle und Kunststoffe zur Wiederverwertung geben. Bestückte Leiterplatten fachgerecht entsorgen.
Beachten Sie unbedingt die produktspezifischen Sicherheits− und Anwendungshinweise in dieser Anleitung!
12 |
l |
EDKCSCX064 DE/EN/FR 4.0 |
Sicherheitshinweise 2
Motor thermisch überwachen
2.2Motor thermisch überwachen
)Hinweis!
ƒDie I2 x t−Überwachung basiert auf einem mathematischen Modell, das aus den erfassten Motorströmen eine thermische Motorbelastung berechnet.
ƒDie berechnete Motorbelastung wird beim Netzschalten gespeichert.
ƒDie Funktion ist UL−zertifiziert, d. h. in UL−approbierten Anlagen sind keine zusätzlichen Schutzmaßnahmen für den Motor erforderlich.
ƒDie I2 x t−Überwachung ist trotzdem kein Motorvollschutz, da andere Einflüsse auf die Motorbelastung nicht erfasst werden können, wie veränderte Kühlungsbedingungen (z. B.
Kühlluftstrom unterbrochen oder zu warm).
Die I2 x t−Belastung des Motors wird in C0066 angezeigt.
Die thermische Belastungsfähigkeit des Motors wird durch die thermische Motor−Zeitkonstante (t, C0128) ausgedrückt. Entnehmen Sie den Wert den Bemessungsdaten des Motors oder fragen Sie den Hersteller des Motors.
Die I2 x t−Überwachung ist so ausgelegt, dass bei einem Motor mit einer thermischen Motor−Zeitkonstante von 5 Minuten (Lenze−Einstellung C0128), einem Motorstrom von 1,5 x IN und einer Auslöseschwelle von 100 % die Überwachung nach 179 s ausgelöst wird.
Durch zwei einstellbare Auslöseschwellen können Sie unterschiedliche Reaktionen festlegen.
ƒEinstellbare Reaktion OC8 (TRIP, Warnung, Aus).
–Die Auslöseschwelle wird in C0127 eingestellt.
–Die Reaktion wird in C0606 eingestellt.
–Die Reaktion OC8 kann beispielsweise für eine Vorwarnung genutzt werden.
ƒFeste Reaktion OC6−TRIP.
–Die Auslöseschwelle wird in C0120 eingestellt.
EDKCSCX064 DE/EN/FR 4.0 |
l |
13 |

2Sicherheitshinweise
Motor thermisch überwachen
|
|
Verhalten der I2 x t−Überwachung |
Bedingung |
|
|
|
Die I2 x t−Überwachung wird deaktiviert. |
Bei C0120 = 0 % und C0127 = 0 % die Regler- |
|
|
|
|||
|
|
Es wird C0066 = 0 % und |
sperre setzen. |
|
|
|
MCTRL−LOAD−I2XT = 0,00 % gesetzt. |
|
|
|
|
|
|
|
|
|
Die I2 x t−Überwachung wird angehalten. |
Bei C0120 = 0 % und C0127 = 0 % die Reglerfrei- |
|
|
|
Der aktuelle Wert in C0066 und am Ausgang |
gabe erteilen. |
|
|
|
MCTRL−LOAD−I2XT wird eingefroren. |
|
|
|
|
|
|
|
|
|
Die I2 x t−Überwachung ist deaktiviert. |
C0606 = 3 (Off) und C0127 > 0 % setzen. |
|
|
|
Die Motorbelastung wird in C0066 angezeigt. |
|
|
) Hinweis!
Eine Fehlermeldung OC6 oder OC8 lässt sich erst zurücksetzen, wenn die I2 x t−Belastung die eingestellte Auslöseschwelle um 5 % unterschritten hat.
14 |
l |
EDKCSCX064 DE/EN/FR 4.0 |
Sicherheitshinweise 2
Motor thermisch überwachen
Fremdbelüftete oder selbstgekühlte Motoren
2.2.1Fremdbelüftete oder selbstgekühlte Motoren
Parametrieren
Zur I2 x t−Überwachung können Sie folgende Codestellen einstellen:
Codestelle |
Bedeutung |
Wertebereich |
Lenze−Einstellung |
|
C0066 |
Anzeige der I2 x t−Belastung des Motors |
0 ... 250 % |
− |
|
C0120 |
Schwelle: Auslösung Fehler "OC6" |
0 ... 120 % |
0 % |
|
|
|
|
|
|
C0127 |
Schwelle: Auslösung Fehler "OC8" |
0 ... 120 % |
0 % |
|
|
|
|
|
|
C0128 |
Thermische Motor−Zeitkonstante |
0,1 ... 50,0 min |
5,0 min |
|
|
|
|
|
|
C0606 |
Reaktion auf Fehler "OC8" |
TRIP, Warnung, Off |
Warnung |
|
Auslösezeit und I2 x t−Belastung berechnen
Formel zur Auslösezeit
|
|
z ) 1 |
|
||||
t + * ( t ) ln 1 * |
|
|
|
||||
|
|
|
|||||
|
|
IMot |
|
2 |
|
||
|
|
|
100 |
||||
IN |
|
||||||
Information
IMot |
Aktueller Motorstrom (C0054) |
IN |
Motor−Bemessungsstrom (C0088) |
t |
Thermische Motor−Zeitkonstante |
|
(C0128) |
zSchwellenwert in C0120 (OC6) oder C0127 (OC8)
Formeln zur I2 x t−Belastung |
|
|
|
|
Information |
|
||||
|
|
|
|
|
|
|
|
L(t) |
Zeitlicher Verlauf der I2 x t−Bela- |
|
|
|
|
|
|
|
|
|
|
stung des Motors |
|
|
|
|
2 |
|
|
|
|
|
(Anzeige: C0066) |
|
|
IMot |
|
|
*t |
|
|
|
|
||
|
|
|
|
IMot |
Aktueller Motorstrom (C0054) |
|
||||
|
|
|
|
|
|
|||||
L(t) + |
|
|
100% |
|
1 * e t |
|
|
|
|
|
IN |
|
|
|
|
||||||
|
IN |
Motor−Bemessungsstrom (C0088) |
|
|||||||
|
|
|
|
|
|
|
|
t |
Thermische Motor−Zeitkonstante |
|
|
|
|
|
|
|
|
|
|
(C0128) |
|
|
|
|
|
|
||||||
Bei gesperrtem Antriebsregler vermindert sich die I2 x t−Belastung: |
|
|||||||||
|
|
|
|
|
|
|
|
L |
I2 x t−Belastung vor Reglersperre |
|
|
|
|
|
|
|
|
|
Start |
Der Wert entspricht bei Fehler− |
|
|
|
|
|
|
|
|
|
|
|
|
|
L(t) + LStart |
|
t |
|
|
|
||||
|
|
|
|
|
||||||
|
e* t |
|
|
Auslösung dem eingestellten |
|
|||||
|
|
|
|
|
|
|
|
|
Schwellenwert in C0120 (OC6) |
|
|
|
|
|
|
|
|
|
|
oder C0127 (OC8). |
|
EDKCSCX064 DE/EN/FR 4.0 |
l |
15 |
2Sicherheitshinweise
Motor thermisch überwachen
Fremdbelüftete oder selbstgekühlte Motoren
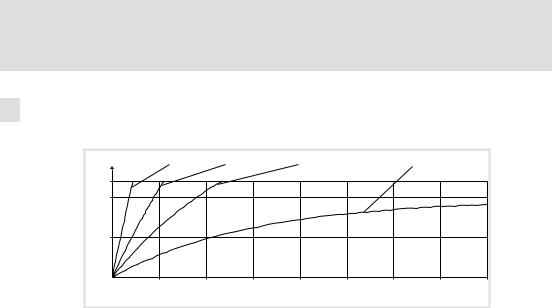
Auslösezeit im Diagramm ablesen
Diagramm zur Ermittlung der Auslösezeiten bei einem Motor mit einer thermischen Motor−Zeitkonstante von 5 Minuten (Lenze−Einstellung C0128):
L [%] |
IMot = 3 × IN |
IMot = 2 × IN |
IMot = 1.5 × IN |
|
IMot = 1 × IN |
|
|||
120 |
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
50 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
0 |
|
100 |
200 |
300 |
400 |
500 |
600 |
700 |
8 |
|
|
|
|
|
|
|
|
9300STD105 |
|
Abb. 2−1 I2 × t−Überwachung: Auslösezeiten bei unterschiedlichen Motorströmen und |
|
||||||||
|
Auslöseschwellen |
|
|
|
|
|
|
||
|
IMot |
Aktueller Motorstrom (C0054) |
|
|
|
|
|||
|
IN |
Motor−Bemessungsstrom (C0088) |
|
|
|
|
|||
|
L |
I2 x t−Belastung des Motors (Anzeige: C0066) |
|
|
|
||||
tZeit
16 |
l |
EDKCSCX064 DE/EN/FR 4.0 |
Sicherheitshinweise 2
Motor thermisch überwachen
Eigenbelüftete Motoren
2.2.2Eigenbelüftete Motoren
Konstruktionsbedingt sind eigenbelüftete Normmotoren im Vergleich zu fremdbelüfteten Motoren im unteren Drehzahlbereich einer erhöhten Wärmeentwicklung ausgesetzt.
JWarnings!
Zur Einhaltung der UL 508C Norm müssen Sie über die Codestelle
C0129/x die drehzahlabhängige Bewertung des zulässigen
Drehmomentes einstellen.
Parametrieren
Zur I2 x t−Überwachung können Sie folgende Codestellen einstellen:
Codestelle |
Bedeutung |
Wertebereich |
Lenze−Einstellung |
|
C0066 |
Anzeige der I2 x t−Belastung des Motors |
0 ... 250 % |
− |
|
C0120 |
Schwelle: Auslösung Fehler "OC6" |
0 ... 120 % |
0 % |
|
|
|
|
|
|
C0127 |
Schwelle: Auslösung Fehler "OC8" |
0 ... 120 % |
0 % |
|
|
|
|
|
|
C0128 |
Thermische Motor−Zeitkonstante |
0,1 ... 50,0 min |
5,0 min |
|
|
|
|
|
|
C0606 |
Reaktion auf Fehler "OC8" |
TRIP, Warnung, Off |
Warnung |
|
|
|
|
|
|
C0129/1 |
S1−Drehmomentkennlinie I1/IN |
10 ... 200 % |
100 % |
|
C0129/2 |
S1−Drehmomentkennlinie n2/nN |
10 ... 200 % |
40 % |
|
EDKCSCX064 DE/EN/FR 4.0 |
l |
17 |

2Sicherheitshinweise
Motor thermisch überwachen
Eigenbelüftete Motoren
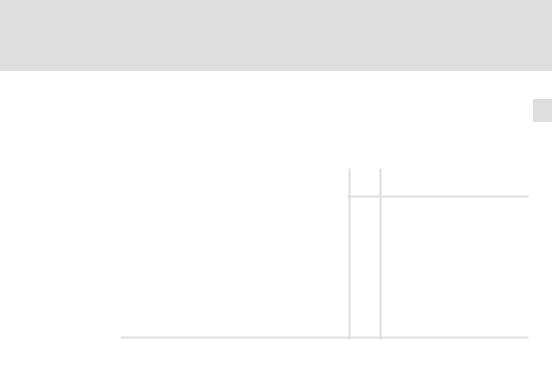
Wirkung der Codestelle C0129/x
I / IN
1.1
C0129/2
1.0
0.9
0.8
0.7 C0129/1
0.6
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
n / nN |
|
|
|
|
0.2 |
0.3 |
0.4 |
||||||||
0 |
0.1 |
|
||||||||||||
|
|
0.132 |
|
|
|
|
|
|
|
|
|
|
||
9300STD350
Abb. 2−2 Betriebspunkt im Bereich der Kennlinienabsenkung
Die abgesenkte Drehzahl−/Drehmomentkennlinie (Abb. 2−2) reduziert die zulässige thermische Belastung eigenbelüfteter Normmotoren. Die Kennlinie ist eine Gerade zu deren Definition zwei Punkte notwendig sind:
ƒPunkt 0: Festlegung mit C0129/1
Mit diesem Wert ist auch eine Anhebung der maximal zulässigen Belastung möglich.
ƒPunkt 1: Festlegung mit C0129/2
Mit größer werdenden Drehzahlen bleibt die maximal zulässige Belastung
unverändert (IMot = IN).
In Abb. 2−2 kann für jeden Betriebspunkt (2) auf der Kennlinie (0 ... 1) die Motordrehzahl und der entsprechende zulässige Motorstrom bzw. das Motordrehmoment (3) abgelesen werden. 3 kann auch mit den Werten in C0129/1 und C0129/2 berechnet werden (Bewertungskoeffizient "y", ¶ 19)
18 |
l |
EDKCSCX064 DE/EN/FR 4.0 |
Sicherheitshinweise 2
Motor thermisch überwachen
Eigenbelüftete Motoren
Auslösezeit und I2 x t−Belastung berechnen
Berechnen Sie die Auslösezeit und I2 x t−Belastung des Motors unter Berücksichtigung der Werte in C0129/1 und C0129/2 (Bewertungskoeffizient "y").
Formeln zur Auslösezeit |
Information |
|
|
|
|
|
|
z ) 1 |
|
||||
T + * ( t ) ln 1 * |
|
|
|
|
|||||
|
|
|
|
||||||
|
|
|
IMot |
2 |
|||||
|
|
|
|
|
|
100 |
|||
|
y IN |
|
|||||||
|
100% * C0129 1 |
|
|
n |
|
|
|
||
y + |
|
|
|
|
|
) C0129 1 |
|||
C0129 2 |
nN |
||||||||
TAuslösezeit der I2 x t−Überwachung
t |
Thermische Motor−Zeitkonstante |
|
(C0128) |
|
|
In |
Funktion: Natürlicher Logarith- |
|
mus |
|
|
IMot |
Aktueller Motorstrom (C0054) |
IN |
Motor−Bemessungsstrom (C0088) |
z |
Schwellenwert in C0120 (OC6) |
|
oder C0127 (OC8) |
|
|
y |
Bewertungskoeffizient |
|
|
nN |
Nenndrehzahl (C0087) |
Formeln zur I2 x t−Belastung |
|
|
|
|
Information |
|
||||
|
|
|
|
|
|
|
|
L(t) |
Zeitlicher Verlauf der I2 x t−Bela- |
|
|
|
|
|
|
|
|
|
|
stung des Motors |
|
|
|
|
|
|
|
|
|
|
(Anzeige: C0066) |
|
|
|
|
|
|
|
|
|
|
|
|
L(t) + |
IMot |
|
2 |
|
|
1 * e*tt |
y |
Bewertungskoeffizient |
|
|
|
100% |
|
|
|
||||||
|
IMot |
Aktueller Motorstrom (C0054) |
|
|||||||
y IN |
|
|
||||||||
|
|
|
IN |
Motor−Bemessungsstrom (C0088) |
|
|||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
t |
Thermische Motor−Zeitkonstante |
|
|
|
|
|
|
|
|
|
|
(C0128) |
|
|
|
|
|
|
|
|||||
Bei gesperrtem Antriebsregler vermindert sich die I2 x t−Belastung: |
|
|||||||||
|
|
|
|
|
|
|
|
L |
I2 x t−Belastung vor Reglersperre |
|
|
|
|
|
|
|
|
|
Start |
Der Wert entspricht bei Fehler− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
||
|
|
|
|
|
|
Auslösung dem eingestellten |
|
|||
L(t) + LStart |
|
* t |
|
|
||||||
|
e |
|
|
|
Schwellenwert in C0120 (OC6) |
|
||||
|
|
|
|
|
|
|
|
|
oder C0127 (OC8). |
|
EDKCSCX064 DE/EN/FR 4.0 |
l |
19 |

2Sicherheitshinweise
Restgefahren
2.3 Restgefahren
Personenschutz
ƒÜberprüfen Sie vor Arbeiten am Achsmodul, ob alle Leistungsklemmen spannungslos sind, da
–nach dem Abschalten der Netzspannung am Versorgungsmodul die Leistungsklemmen +UG, −UG, U, V und W noch mindestens 3 Minuten gefährliche Spannung führen.
–bei gestopptem Motor die Leistungsklemmen +UG, −UG, U, V und W gefährliche Spannung führen.
ƒDie Betriebstemperatur des Kühlkörpers ist > 70 °C:
–Hautkontakt mit dem Kühlkörper führt zu Verbrennungen.
ƒDer Ableitstrom gegen PE ist > 3,5 mA AC bzw. > 10 mA DC.
–Nach EN 61800−5−1 ist eine Festinstallation erforderlich.
–Der PE−Anschluss muss nach EN 61800−5−1 ausgeführt sein.
–Weitere Bedingungen der EN 61800−5−1 für hohen Ableitstrom einhalten.
Geräteschutz
ƒAlle steckbaren Anschlussklemmen nur im spannungslosen Zustand aufstecken oder abziehen!
ƒDie Leistungsklemmen +UG, −UG, U, V, W und PE sind nicht verpolungssicher ausgelegt.
– Polarität der Leistungsklemmen beim Verdrahten beachten!
ƒErst wenn alle Geräte im Leistungsverbund betriebsbereit sind, darf Leistung umgesetzt werden. Sonst kann die Eingangsstrombegrenzung zerstört werden.
Häufiges Netzschalten (z. B. Tipp−Betrieb über Netzschütz) kann die Eingangsstrombegrenzung des Achsmoduls überlasten und zerstören, wenn
ƒdas Achsmodul über das Versorgungsmodul ECSxE versorgt wird und die Eingangsstrombegrenzung abhängig von der DC−Zwischenkreisspannung aktiviert wird (C0175 = 1 oder 2).
ƒdas Achsmodul über ein nicht von Lenze geliefertes Versorgungsmodul versorgt wird.
ƒdie Niederspannungsversorgung (24 V) ausgeschaltet ist.
Deshalb müssen bei diesen Betriebsbedingungen zwischen zwei Einschaltvorgängen mindestens 3 Minuten vergehen!
Verwenden Sie bei häufigen sicherheitsbedingten Abschaltungen die Sicherheitsfunktion ˜Sicher abgeschaltetes Moment˜ (STO).
20 |
l |
EDKCSCX064 DE/EN/FR 4.0 |
Sicherheitshinweise 2
Restgefahren
Motorschutz
ƒNur Motoren verwenden, deren Isolationsfestigkeit min. û = 1,5 kV, min. du/dt = 5 kV/ms beträgt.
– Lenze−Motoren erfüllen diese Bedingungen.
ƒWenn Sie Motoren einsetzen, deren Isolationsfestigkeit Ihnen nicht bekannt ist, nehmen Sie bitte Rücksprache mit Ihrem Motorenlieferanten.
ƒBei bestimmten Einstellungen der Achsmodule kann der angeschlossene Motor überhitzt werden, z. B. längerer Betrieb eigenbelüfteter Motoren bei kleinen Drehzahlen.
ƒZur Temperaturüberwachung des Motors Kaltleiter oder Temperaturschalter mit PTC−Charakteristik einsetzen.
EDKCSCX064 DE/EN/FR 4.0 |
l |
21 |

2Sicherheitshinweise
Sicherheitshinweise für die Installation nach UL
|
2.4 |
Sicherheitshinweise für die Installation nach UL |
|
|
|
JWarnings!
General markings:
ƒUse 60/75 °C or 75 °C copper wire only.
ƒMaximum ambient temperature 55 °C, with reduced output current.
Markings provided for the supply units:
ƒSuitable for use on a circuit capable of delivering not more than 5000 rms symmetrical amperes, 480 V max, when protected by K5 or H Fuses (400/480 V devices).
ƒAlternate − Circuit breakers (either inverse−time, instantaneous trip types or combination motor controller type E) may be used in
lieu of above fuses when it is shown that the let−through energy (i2t) and peak let−through current (Ip) of the inverse−time current−limiting circuit breaker will be less than that of the non−semiconductor type K5 fuses with which the drive has been tested.
ƒAlternate − An inverse−time circuit breaker may be used, sized upon the input rating of the drive, multiplied by 300 %.
Markings provided for the inverter units:
ƒThe inverter units shall be used with supply units which are provided with overvoltage devices or systems in accordance with UL840 2nd ed., Table 5.1.
ƒThe devices are provided with integral overload and integral thermal protection for the motor.
ƒThe devices are not provided with overspeed protection.
Terminal tightening torque of lb−in (Nm)
Terminal |
lb−in |
|
Nm |
|
|
X 21, X 22, X 23, X 24 |
10.6 |
... 13.3 |
1.2 ... |
1.5 |
|
|
|
|
|
|
|
X4, X6, X14 |
1.95 |
... 2.2 |
0.22 ... |
0.25 |
|
|
|
|
|
|
|
X 25 |
4.4 ... |
7.1 |
0.5 ... |
0.8 |
|
Wiring diagram AWG |
|
|
|
|
|
|
|
|
|
|
|
Terminal |
AWG |
|
|
|
|
X 21, X 22, X 23, X 24 |
12 ... |
8 |
|
|
|
|
|
|
|
|
|
X4, X6, X14 |
28 ... |
16 |
|
|
|
|
|
|
|
|
|
X 25 |
24 ... |
12 |
|
|
|
22 |
l |
EDKCSCX064 DE/EN/FR 4.0 |

Technische Daten |
3 |
Allgemeine Daten und Einsatzbedingungen
3 |
Technische Daten |
|
|
|
|
3.1Allgemeine Daten und Einsatzbedingungen
Normen und Einsatzbedingungen
Konformität |
|
|
CE |
|
Niederspannungsrichtlinie (2006/95/EG) |
|
|||
|
|
|
|
|
|
|
|
|
|
Approbationen |
|
|
UL 508C |
|
Power Conversion Equipment |
|
|||
|
|
|
|
|
|
|
Underwriter Laboratories (File No. E132659) |
|
|
|
|
|
|
|
CSA 22.2 No. 14 |
|
|
||
|
|
|
|
|
|
für USA und Kanada |
|
||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Max. zulässige |
geschirmt |
50 m |
|
bei Netz−Bemessungsspannung und Schaltfrequenz |
|
||||
Motorleitungs- |
|
|
|
|
8 kHz |
|
|||
länge |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Verpackung (EN ISO 4180) |
|
Versandverpackung |
|
|
|
||||
|
|
|
|
|
|
|
|
||
Einbau |
|
|
l Einbau in Schaltschrank IP20 |
|
|||||
|
|
|
|
|
l Für die Funktion "Sicher abgeschaltetes Moment" (ehem. "Sicherer |
|
|||
|
|
|
|
|
Halt"): Einbau in Schaltschrank IP54 |
|
|||
|
|
|
|
|
|
|
|
|
|
Einbaulage |
|
|
senkrechthängend |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Einbaufreiräume |
oberhalb |
|
³ 65 mm |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
unterhalb |
³ 65 mm |
|
|
|
||
|
|
|
|
|
mit Schirmbefestigung ECSZS000X0B: > 195 mm |
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
seitlich |
|
ohne Abstand anreihbar |
|
|||
|
|
|
|
|
|
|
|
||
Umweltbedingungen |
|
|
|
|
|
|
|||
Klima |
|
3k3 nach IEC/EN 60721−3−3 |
|
|
|
||||
|
|
|
|
Betauung, Spritzwasser und Eisbildung |
|
|
|||
|
|
|
|
nicht zulässig. |
|
|
|
||
|
|
|
|
|
|
|
|||
|
Lagerung |
|
IEC/EN 60721−3−1 |
|
1K3 (−25 ... + 55 °C) |
|
|||
|
|
|
|
|
|
|
|||
|
Transport |
|
IEC/EN 60721−3−2 |
|
2K3 (−25 ... +70 °C) |
|
|||
|
|
|
|
|
|
|
|||
|
Betrieb |
|
IEC/EN 60721−3−3 |
|
3K3 (0 ... + 55 °C) |
|
|||
|
|
|
|
|
|
|
|
l Luftdruck: 86 ... 106 kPa |
|
|
|
|
|
|
|
|
|
l Über +40 °C: Ausgangs−Bemessungs- |
|
|
|
|
|
|
|
|
|
strom um 2 %/°C reduzieren. |
|
|
|
|
|
|
|
|
|
|
|
Aufstellhöhe |
|
|
|
|
|
0 ... 4000 m üNN |
|
||
|
|
|
|
|
|
|
|
l Über 1000 m üNN: Ausgangs−Bemes- |
|
|
|
|
|
|
|
|
|
sungsstrom um 5 %/1000 m reduzie- |
|
|
|
|
|
|
|
|
|
ren. |
|
|
|
|
|
|
|
|
|
l Über 2000 m üNN: Einsatz nur er- |
|
|
|
|
|
|
|
|
|
laubt in Umgebungen mit Überspan- |
|
|
|
|
|
|
|
|
|
nungskategorie II |
|
|
|
|
|
|
|||||
Verschmutzung |
|
EN 61800−5−1, UL840: Verschmutzungsgrad 2 |
|
||||||
|
|
|
|
||||||
Vibrationsfestigkeit |
|
Beschleunigungsfest bis 0,7 g (Germanischer Lloyd, allgemeine Bedingungen) |
|
||||||
EDKCSCX064 DE/EN/FR 4.0 |
l |
23 |
3Technische Daten
Allgemeine Daten und Einsatzbedingungen
Allgemeine elektrische Daten
EMV |
Einhaltung der Anforderungen nach EN 61800−3 |
|
||
Störaussendung |
Einhaltung der Grenzwertklasse C2 nach EN 61800−3 |
|||
|
(erreicht mit anwendungstypischem Summenfilter) |
|||
|
|
|
|
|
Störfestigkeit |
Anforderungen nach EN 61800−3 |
|
|
|
|
|
|
|
|
|
Anforderung |
Norm |
Schärfegrade |
|
|
|
|
|
|
|
ESD 1) |
EN 61000−4−2 |
3, d. h. |
|
|
|
|
l 8 kV bei Luftentladung |
|
|
|
|
l 6 kV bei Kontaktentla- |
|
|
|
|
|
dung |
|
|
|
|
|
|
leitungsgeführte Hochfre- |
EN 61000−4−6 |
10 V; 0,15 ... 80 MHz |
|
|
quenz |
|
|
|
|
|
|
|
|
|
HF−Einstrahlung (Gehäuse) |
EN 61000−4−3 |
3, d. h. 10 V/m; |
|
|
|
|
80 ... 1000 MHz |
|
|
|
|
|
|
|
Burst |
EN 61000−4−4 |
3/4, d. h. 2 kV/5 kHz |
|
|
|
|
|
|
|
Surge (Stoßspannung auf |
EN 61000−4−5 |
3, d. h. 1,2/50 ms |
|
|
Netzleitung) |
|
l |
1 kV Phase−Phase |
|
|
|
l |
2 kV Phase−PE |
|
|
|
|
|
Isolationsfestigkeit |
EN61800−5−1, UL840: Überspannungskategorie III |
|
||
|
|
|
|
|
Ableitstrom gegen PE |
> 3,5 mA AC |
|
|
|
(nach EN 61800−5−1) |
|
|
|
|
|
|
|
|
|
Schutzart |
IP20 bei |
|
|
|
lStandardmontage (Einbaugerät)
lMontage in Cold−Plate−Technik
lMontage mit thermischer Separierung (Durchstoß−Technik), IP54 auf der Kühlkörperseite
Schutzmaßnahmen gegen |
l |
Kurzschluss Leistungsklemmen |
|
|
– Motorklemme eingeschränkt kurzschlussfest (Nach Kurzschlusser- |
|
|
kennung muss die Störungsmeldung zurückgesetzt werden.) |
|
l |
Kurzschluss Hilfsstromkreise |
|
|
– Digital−Ausgänge: kurzschlussfest |
|
|
– Bus− und Gebersysteme: eingeschränkt kurzschlussfest (Ggf. können |
|
|
Überwachungsfunktionen abschalten. Störungsmeldungen müssen |
|
|
dann zurückgesetzt werden.) |
|
l Erdschluss (erdschlussfest im Betrieb, eingeschränkt erdschlussfest |
|
|
|
beim Netz−Einschalten) |
|
l |
Überspannung |
|
l |
Kippen des Motors |
|
l Motor−Übertemperatur (Eingang für KTY, I2 x t−Überwachung) |
|
Schutzisolierung von Steuerschalt- |
Schutztrennung vom Netz |
|
kreisen |
Doppelte/verstärkte Isolierung nach EN 61800−5−1 |
|
1) Die Störfestigkeit in den genannten Schärfegraden muss durch den Schaltschrank gewährleistet sein. Der Anwender muss die Einhaltung der genannten Schärfegrade prüfen.
24 |
l |
EDKCSCX064 DE/EN/FR 4.0 |

|
|
|
|
|
|
Technische Daten |
|
3 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
Bemessungsdaten |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.2 |
Bemessungsdaten |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Bemessungsdaten |
|
Typ |
|
|
|
Achsmodul |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
ECSxL004 |
ECSxL008 |
ECSxL016 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ausgangsleistung 400 V−Netz |
|
SN [kVA] |
|
1,3 |
|
2,6 |
|
|
5,3 |
|
|
|
|||||
|
Daten für Betrieb mit vorgeschaltetem Versor- |
UNetz [V] |
400 |
|
480 |
400 |
|
480 |
|
400 |
|
480 |
|
|
|
|||
|
gungsmodul an Netzspannung |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
DC−Zwischenkreisspannung |
|
UZK [V] |
|
|
|
15 ... 770 |
|
|
|
|
|
|
|
||||
|
Zwischenkreisstrom |
|
IZK [A] |
2,5 |
|
2,0 |
4,9 |
|
3,9 |
|
9,8 |
|
7,8 |
|
|
|
||
|
Ausgangs−Bemessungsstrom bei 4 kHz |
IN [A] |
2,0 |
|
1,6 |
4,0 |
|
3,2 |
|
8,0 |
|
6,4 |
|
|
|
|||
|
(führt bei 20 °C Umgebungstemperatur zu 70 °C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Kühlkörpertemperatur) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Ausgangs−Bemessungsstrom bei 8 kHz (führt |
IN [A] |
1,4 |
|
1,1 |
2,7 |
|
2,2 |
|
5,3 |
|
4,2 |
|
|
|
|||
|
bei 20 °C Umgebungstemperatur zu 70 °C Kühl- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
körpertemperatur) 1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
max. Ausgangsstrom |
|
Imax [A] |
|
4,0 |
|
8,0 |
|
16,0 |
|
|
|
||||||
|
(Beschleunigungsstrom) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Dauerstrom im Stillstand |
|
I0,eff 4 kHz [A] |
2,0 |
|
1,6 |
4,0 |
|
3,2 |
|
8,0 |
|
6,4 |
|
|
|
||
|
(Haltestrom bei 90 °C, 4 kHz) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kurzz. Stillstandsstrom |
|
I0,eff 4 kHz [A] |
|
2,3 |
|
4,6 |
|
|
9,1 |
|
|
|
|||||
|
(Haltestrom bei 90 °C, 4 kHz) 2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Kurzz. Stillstandsstrom |
|
I0,eff 4 kHz [A] |
|
3,0 |
|
6,0 |
|
12,0 |
|
|
|
||||||
|
(Haltestrom bei 70 °C, 4 kHz) 2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Kurzz. Stillstandsstrom |
|
I0,eff 8 kHz [A] |
|
1,5 |
|
3,0 |
|
|
6,0 |
|
|
|
|||||
|
(Haltestrom bei 70 °C, 8 kHz) 2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Verlustleistung (Betrieb mit |
Gesamt |
|
27,3 |
46,3 |
|
84,7 |
|
|
|
||||||||
|
Bemessungsstrom bei |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Innenraum |
PV [W] |
13,3 |
17,3 |
|
20,7 |
|
|
|
||||||||
|
4 kHz / 8 kHz) |
|
|
|
|
|
||||||||||||
|
|
|
|
Kühlkörper |
|
14,0 |
29,0 |
|
64,0 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
max. Ausgangsfrequenz |
|
fout [Hz] |
|
|
|
|
600 |
|
|
|
|
|
|
|
|||
|
Masse |
|
|
|
m [kg] |
|
|
|
ca. 2,4 |
|
|
|
|
|
|
|||
1)Wenn die Temperatur des Kühlkörpers 70 °C erreicht, wird automatisch auf Schaltfrequenz 4 kHz umgeschaltet.
2)Die angegebene Temperatur ist die gemessene Temperatur des Kühlkörpers (C0061).
L |
Applikationssoftware: |
S = Speed & Torque |
P = Posi & Shaft |
|
|
M = Motion |
A = Application |
EDKCSCX064 DE/EN/FR 4.0 |
l |
25 |

3Technische Daten
Bemessungsdaten
|
|
Bemessungsdaten |
|
|
Typ |
|
|
|
|
Achsmodul |
|
|
|
|
|
|
|
|
|
|
|
ECSxL032 |
ECSxL048 |
ECSxL064 |
|
||||
|
|
|
|
|
|
|
|
|||||||
|
|
Ausgangsleistung 400 V−Netz |
|
|
SN [kVA] |
|
8,3 |
11,2 |
13,2 |
|
||||
|
|
Daten für Betrieb mit vorgeschaltetem Versor- |
|
UNetz [V] |
400 |
|
480 |
400 |
480 |
400 |
480 |
|
||
|
|
gungsmodul an Netzspannung |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
DC−Zwischenkreisspannung |
|
|
UZK [V] |
|
|
|
15 ... 770 |
|
|
|
||
|
|
Zwischenkreisstrom |
|
|
IZK [A] |
|
15,6 |
|
12,5 |
20,9 |
16,8 |
24,5 |
19,6 |
|
|
|
Ausgangs−Bemessungsstrom bei 4 kHz |
|
IN [A] |
|
12,7 |
|
10,2 |
17,0 |
13,6 |
20,0 |
16,0 |
|
|
|
|
(führt bei 20 °C Umgebungstemperatur zu 70 °C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kühlkörpertemperatur) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ausgangs−Bemessungsstrom bei 8 kHz (führt |
|
IN [A] |
|
8,5 |
|
6,8 |
11,3 |
9,0 |
13,3 |
10,6 |
|
|
|
|
bei 20 °C Umgebungstemperatur zu 70 °C Kühl- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
körpertemperatur) 1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
max. Ausgangsstrom |
|
|
Imax [A] |
32,0 |
48,0 |
64,0 |
|
|||||
|
|
(Beschleunigungsstrom) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Dauerstrom im Stillstand 2) |
|
I |
0,eff 4 kHz |
[A] |
16,0 |
|
12,8 |
23,0 |
18,4 |
27,0 |
21,6 |
|
|
|
(Haltestrom bei 90 °C, 4 kHz) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Kurzz. Stillstandsstrom |
|
I0,eff 4 kHz [A] |
18,1 |
27,2 |
36,3 |
|
||||||
|
|
(Haltestrom bei 90 °C, 4 kHz) 2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kurzz. Stillstandsstrom |
|
I0,eff 4 kHz [A] |
24,0 |
36,0 |
48,0 |
|
||||||
|
|
(Haltestrom bei 70 °C, 4 kHz) 2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kurzz. Stillstandsstrom |
|
I0,eff 8 kHz [A] |
12,1 |
18,1 |
24,2 |
|
||||||
|
|
(Haltestrom bei 70 °C, 8 kHz) 2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Verlustleistung (Betrieb mit |
Gesamt |
|
|
|
144,5 |
166,5 |
199,0 |
|
||||
|
|
Bemessungsstrom bei |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Innenraum |
|
PV [W] |
|
27,5 |
34,5 |
41,0 |
|
|||||
|
|
4 kHz / 8 kHz) |
|
|
|
|||||||||
|
|
|
Kühlkörper |
|
|
|
117,0 |
132,0 |
158,0 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
max. Ausgangsfrequenz |
|
|
fout [Hz] |
|
|
|
600 |
|
|
|
||
|
|
Masse |
|
|
m [kg] |
|
ca. 2,4 |
|
ca. 3,3 |
|
|
|||
1)Wenn die Temperatur des Kühlkörpers 70 °C erreicht, wird automatisch auf Schaltfrequenz 4 kHz umgeschaltet.
2)Die angegebene Temperatur ist die gemessene Temperatur des Kühlkörpers (C0061).
L |
Applikationssoftware: |
S = Speed & Torque |
P = Posi & Shaft |
|
|
M = Motion |
A = Application |
26 |
l |
EDKCSCX064 DE/EN/FR 4.0 |

Mechanische Installation |
4 |
Wichtige Hinweise
4 |
Mechanische Installation |
|
|
|
|
4.1Wichtige Hinweise
ƒAchsmodule der Reihe ECS verfügen über die Schutzart IP20 und sind daher nur für den Einbau in Schaltschränken bestimmt.
ƒBei verunreinigter Kühlluft (Staub, Flusen, Fette, aggressive Gase):
–Ausreichende Gegenmaßnahmen treffen, z. B. separate Luftführung, Einbau von Filtern, regelmäßige Reinigung.
ƒMögliche Einbaulagen:
–Senkrecht an der Montageplatte
–DC−Zwischenkreisanschlüsse (X23) oben
–Motoranschluss (X24) unten
ƒHalten Sie die angegebenen Einbaufreiräume oberhalb und unterhalb zu anderen Installationen ein!
–Bei Verwendung der Schirmbefestigung ECSZS000X0B ist ein zusätzlicher Freiraum erforderlich.
–Achten Sie auf ungehinderten Zutritt der Kühlluft und ungehinderten Austritt der Abluft.
–Sie können mehrere Module der Reihe ECS im Schaltschrank ohne Zwischenraum nebeneinander befestigen.
ƒDie Montageplatte des Schaltschranks
–muss elektrisch leitfähig sein.
–darf nicht lackiert sein.
ƒBei dauerhaften Schwingungen oder Erschütterungen den Einsatz von Schwingungsdämpfern prüfen.
EDKCSCX064 DE/EN/FR 4.0 |
l |
27 |

4Mechanische Installation
Montage in Cold−Plate−Technik
4.2Montage in Cold−Plate−Technik
Die Achsmodule ECSC... sind für die Montage in Cold−Plate−Technik (z. B. auf Summenkühlern) bestimmt.
Anforderungen an den Summenkühler
Für den sicheren Betrieb der Achsmodule sind folgende Bedingungen einzuhalten:
ƒGute thermische Anbindung an den Kühler:
–Die Kontaktfläche zwischen Summenkühler und Achsmodul muss mindestens so groß sein wie die Kühlplatte des Achsmoduls.
–Ebene Kontaktfläche, Abweichung max. 0,05 mm.
–Summenkühler mit allen vorgeschriebenen Schraubverbindungen mit dem Achsmodul verbinden.
ƒThermischen Widerstand Rth nach Tabelle einhalten.
–Die Werte gelten für den Betrieb der Achsmodule unter Bemessungsbedingungen.
Achsmodul |
Abzuführende Leistung |
Kühlkörper − Umgebung |
|
Typ |
|
Pv [W] |
Rth [K/W] |
ECSCL004 |
|
14,0 |
|
|
|
|
|
ECSCL008 |
|
29,0 |
0,31 |
ECSCL016 |
|
64,0 |
|
|
|
|
|
ECSCL032 |
|
117,0 |
0,13 |
ECSCL048 |
|
132,0 |
|
|
|
||
ECSCL064 |
|
158,0 |
0,11 |
L Anwendungs−Software: |
S = Speed & Torque |
P = Posi & Shaft |
|
|
|
M = Motion |
A = Application |
ƒUmgebungsbedingungen:
–Für die Achsmodule gelten weiterhin die Bemessungsdaten zur Umgebungstemperatur und die Derating−Faktoren bei erhöhter Temperatur (^ 23 ff.).
–Temperatur der Kühlplatte ("cold plate"): max. +85 °C
28 |
l |
EDKCSCX064 DE/EN/FR 4.0 |
Mechanische Installation |
4 |
Montage in Cold−Plate−Technik
Abmessungen
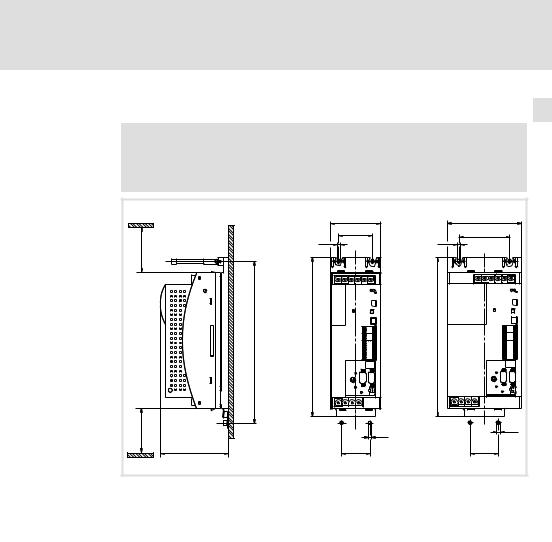
4.2.1Abmessungen
) Hinweis!
Montage mit Schirmbefestigung ECSZS000X0B:
ƒ Einbaufreiraum unterhalb des Moduls > 195 mm |
|
||
|
|
|
|
|
a |
|
a |
65mm |
a1 |
|
a1 |
g |
|
g |
|
|
|
|
|
|
b |
b |
|
|
d |
|
|
mm |
|
g |
g |
65 |
|
|
|
|
|
|
|
e |
c1 |
|
c1 |
|
|
|
ECSXA009 |
Abb. 4−1 Abmessungen bei Bauform "Cold−Plate−Technik"
Achsmodul |
|
|
|
|
Maße [mm] |
|
|
|
|
||
Typ |
Bau- |
a |
a1 |
b |
|
c1 |
d |
e |
|
g |
|
|
|
||||||||||
|
größe |
|
|
|
|
|
|
|
|
|
|
ECSCL004 |
|
|
|
|
|
|
|
|
|
|
|
ECSCL008 |
0 |
88,5 |
60 |
|
|
|
|
|
|
|
|
ECSCL016 |
282 |
|
50 |
|
287 |
121 |
M6 |
||||
|
|
|
|
|
|||||||
ECSCL032 |
|
|
|
|
|
157 |
1) |
||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
ECSCL048 |
1 |
131 |
90 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ECSCL064 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
1)max. 157 mm, je nach aufgestecktem Kommunikationsmodul
L Anwendungs−Software: |
S = Speed & Torque |
P = Posi & Shaft |
|
M = Motion |
A = Application |
EDKCSCX064 DE/EN/FR 4.0 |
l |
29 |
4Mechanische Installation
Montage in Cold−Plate−Technik
Montageschritte
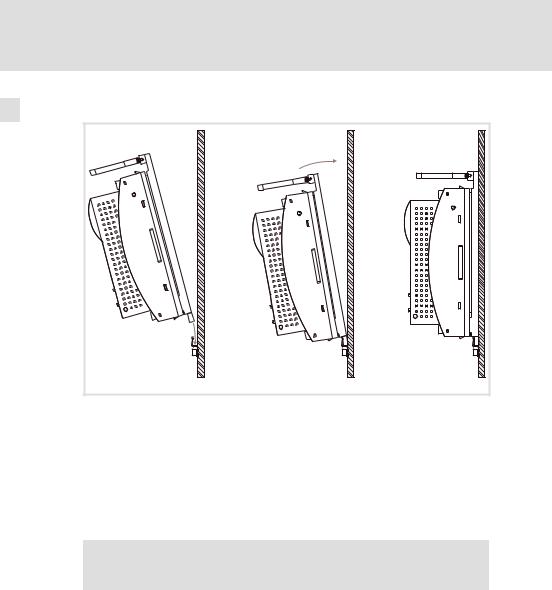
4.2.2Montageschritte
|
|
|
ECSXA030
Abb. 4−2 Montage bei Bauform "Cold−Plate−Technik"
So montieren Sie das Achsmodul:
1.Befestigungsbohrungen auf Montagefläche vorbereiten.
– Dazu Bohrschablone anlegen.
2.Kontaktfläche von Summenkühler und Kühlplatte des Achsmoduls säubern und entfetten (z. B. mit Spiritus).
3.Halterung auf den Summenkühler schrauben.
4.Achsmodul von oben • in die Halterung schieben ‚ und die beiden Stehbolzen mit 3,5 ... 4,5 Nm festziehen ƒ.
) Hinweis!
Eindringtiefe der Schrauben in den Summenkühler: ca. 15 mm
I Tipp!
Der Wärmeübergangswiderstand wird verringert, wenn Sie nach 2.
ƒWärmeleitpaste auf der Kontaktfläche dünn auftragen oder
ƒWärmeleitfolie verwenden.
30 |
l |
EDKCSCX064 DE/EN/FR 4.0 |
Loading...