


Schneider Electric LXM32M User Manual

LXM32M
Modbus-TCP module
Fieldbus manual
V1.01, 01.2012
ETH
0198441113843, V1.01, 01.2012
www.schneider-electric.com

Important information LXM32M
Important information
This manual is part of the product.
Carefully read this manual and observe all instructions.
Keep this manual for future reference.
Hand this manual and all other pertinent product documentation over
to all users of the product.
Carefully read and observe all safety instructions and the chapter
"Before you begin - safety information".
Some products are not available in all countries.
For information on the availability of products, please consult the catalog.
Subject to technical modifications without notice.
All details provided are technical data which do not constitute warranted qualities.
Most of the product designations are registered trademarks of their
respective owners, even if this is not explicitly indicated.
2 Modbus-TCP module
0198441113843, V1.01, 01.2012
LXM32M Table of contents
Table of contents
Important information 2
Table of contents 3
About this manual 7
Further reading 8
1 Introduction 9
2 Before you begin - safety information 11
2.1 Qualification of personnel 11
2.2 Intended use 11
2.3 Hazard categories 12
2.4 Basic information 13
2.5 Standards and terminology 14
3 Basics 15
3.1 Modbus TCP technology 15
3.1.1 Function principle 15
3.1.2 Bus topology 15
3.1.3 Client / server model 16
3.1.4 Network service SNMP 16
3.2 Modbus TCP protocol 17
3.2.1 MBAP header 18
3.3 Modbus TCP communication 19
3.3.1 Connection management 19
3.3.2 Modbus response to a Modbus request 20
3.3.3 Reading and writing parameters 21
3.3.4 I/O scanning to "Drive Profile Lexium" 22
3.3.4.1 I/O scanning Output 23
3.3.4.2 I/O scanning Input 24
3.3.4.3 Parameter channel 26
3.4 Modbus services - "Function Code" 28
3.4.1 "Function Code" 3 (Read Multiple Registers) 28
3.4.2 "Function Code" 8 (Diagnostics) 29
3.4.3 "Function Code" 16 (Write Multiple Registers) 30
3.4.4 "Function Code" 23 (ReadWrite Multiple Registers) 31
3.4.5 "Function Code" 43 (Encapsulated Interface Transport) 32
3.4.6 Examples 33
3.4.6.1 Example of "Function Code" 3 33
3.4.6.2 Example of "Function Code" 16 33
4 Installation 35
0198441113843, V1.01, 01.2012
Modbus-TCP module 3
Table of contents LXM32M
4.1 Installation of the module 35
4.2 Electrical installation 36
5 Commissioning 37
5.1 Commissioning the device 37
5.2 "First Setup" 38
5.2.1 Manual assignment of the network address 39
5.2.2 Assignment of the network address via BOOTP 41
5.2.3 Assignment of the network address via DHCP 42
5.3 Setting the transmission rate 43
5.4 Setting the protocol 43
5.5 Setting the gateway 44
5.6 Master with Word Swap 45
5.7 Setting I/O-Scanning 46
5.7.1 Activating I/O scanning 46
5.7.2 Setting the master for I/O scanning 46
5.7.3 Setting the mapping for I/O scanning 47
5.7.4 Setting communication monitoring for I/O scanning 49
5.8 Setting the web server 49
6 Operation 51
6.1 Operating states 52
6.1.1 Indication of the operating state 52
6.1.2 Changing the operating state 53
6.2 Operating modes 54
6.2.1 Indicating and monitoring the operating mode 54
6.2.2 Starting and changing an operating mode 55
6.2.3 Overview of operating modes 56
6.2.4 Operating mode Jog 57
6.2.5 Operating mode Electronic Gear 58
6.2.6 Operating mode Profile Torque 59
6.2.7 Operating mode Profile Velocity 60
6.2.8 Operating mode Profile Position 61
6.2.9 Operating mode Homing 62
6.2.10 Operating mode Motion Sequence 63
6.3 Extended settings 64
6.3.1 Web server 64
6.3.1.1 Setting the web server 64
6.3.1.2 Accessing the web server 64
6.3.1.3 User interface 65
6.3.2 FTP server 66
6.3.2.1 Accessing the FTP server 66
6.3.2.2 User-specific adaptation of the website 66
6.3.3 FDR service (Fast Device Replacement) 67
7 Diagnostics and troubleshooting 69
7.1 Fieldbus communication error diagnostics 69
4 Modbus-TCP module
0198441113843, V1.01, 01.2012
LXM32M Table of contents
7.2 Status LEDs 70
7.3 Error indication 72
8 Accessories and spare parts 75
8.1 Cables 75
9 Glossary 77
9.1 Units and conversion tables 77
9.1.1 Length 77
9.1.2 Mass 77
9.1.3 Force 77
9.1.4 Power 77
9.1.5 Rotation 78
9.1.6 Torque 78
9.1.7 Moment of inertia 78
9.1.8 Temperature 78
9.1.9 Conductor cross section 78
9.2 Terms and Abbreviations 79
10 Index 81
0198441113843, V1.01, 01.2012
Modbus-TCP module 5

LXM32M
6 Modbus-TCP module
0198441113843, V1.01, 01.2012
LXM32M
About this manual
About this manual
This manual applies to the module Modbus TCP for the product
LXM32M, module identification ETH.
The information provided in this manual supplements the product
manual.
Source manuals The latest versions of the manuals can be downloaded from the Inter-
net at:
http://www.schneider-electric.com
Source CAD data For easier engineering, CAD data (EPLAN macros or drawings) are
available for download from the Internet at:
http://www.schneider-electric.com
Corrections and suggestions We always try to further optimize our manuals. We welcome your sug-
gestions and corrections.
Please get in touch with us by e-mail:
techcomm@schneider-electric.com.
Work steps If work steps must be performed consecutively, this sequence of steps
is represented as follows:
■
Special prerequisites for the following work steps
▶
Step 1
◁
Specific response to this work step
▶
Step 2
If a response to a work step is indicated, this allows you to verify that
the work step has been performed correctly.
Unless otherwise stated, the individual steps must be performed in the
specified sequence.
Making work easier Information on making work easier is highlighted by this symbol:
Sections highlighted this way provide supplementary information on
making work easier.
Parameters In text sections, parameters are shown with the parameter name, for
example _IO_act. A list of the parameters can be found in the product manual in the chapter Parameters.
SI units SI units are the original values. Converted units are shown in brackets
behind the original value; they may be rounded.
Example:
Minimum conductor cross section: 1.5 mm2 (AWG 14)
Inverted signals Inverted signals are represented by an overline, for example STO_A or
STO_B.
Glossary Explanations of special technical terms and abbreviations.
0198441113843, V1.01, 01.2012
Modbus-TCP module 7

About this manual
Further reading
User Association http://www.modbus.org
LXM32M
Index List of keywords with references to the corresponding page numbers.
8 Modbus-TCP module
0198441113843, V1.01, 01.2012
L
N
LXM32M
1 Introduction
1 Introduction
1
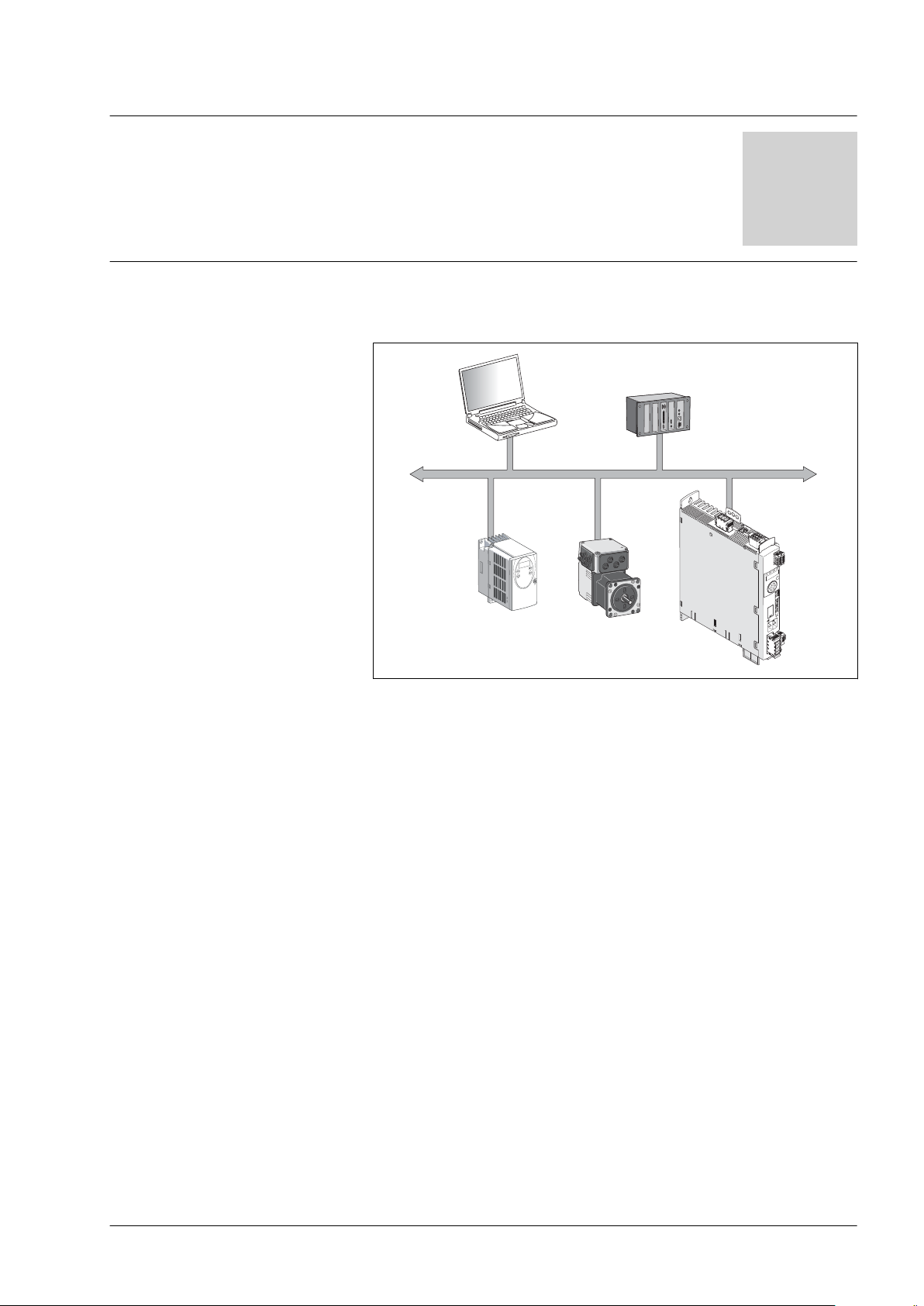
Different products with a Modbus TCP interface can be operated in
the same fieldbus. Modbus TCP provides a common basis for interchanging commands and data between the network devices.
Figure 1: Fieldbus products on the network
Features The product supports the following functions via Modbus TCP:
•
Automatic IP address assignment via BOOTP or DHCP
•
Automatically obtaining configuration data via the FDR (Fast
Device Replacement) service
•
Commissioning via commissioning software
•
Diagnostics and configuration via integrated web server
•
Reading and writing parameters
•
Controlling the drive
•
Monitoring inputs and outputs
•
Diagnostics and monitoring functions
0198441113843, V1.01, 01.2012
Modbus-TCP module 9

1 Introduction
LXM32M
10 Modbus-TCP module
0198441113843, V1.01, 01.2012
LXM32M
2 Before you begin - safety information
2 Before you begin - safety information
2.1 Qualification of personnel
Only appropriately trained persons who are familiar with and understand the contents of this manual and all other pertinent product documentation are authorized to work on and with this product. In addition,
these persons must have received safety training to recognize and
avoid hazards involved. These persons must have sufficient technical
training, knowledge and experience and be able to foresee and detect
potential hazards that may be caused by using the product, by changing the settings and by the mechanical, electrical and electronic equipment of the entire system in which the product is used.
All persons working on and with the product must be fully familiar with
all applicable standards, directives, and accident prevention regulations when performing such work.
2
2.2
Intended use
The functions described in this manual are only intended for use with
the basic product; you must read and understand the appropriate
product manual.
The product may only be used in compliance with all applicable safety
regulations and directives, the specified requirements and the technical data.
Prior to using the product, you must perform a risk assessment in view
of the planned application. Based on the results, the appropriate
safety measures must be implemented.
Since the product is used as a component in an entire system, you
must ensure the safety of persons by means of the design of this
entire system (for example, machine design).
Operate the product only with the specified cables and accessories.
Use only genuine accessories and spare parts.
Any use other than the use explicitly permitted is prohibited and can
result in hazards.
Electrical equipment should be installed, operated, serviced, and
maintained only by qualified personnel.
The product must NEVER be operated in explosive atmospheres
(hazardous locations, Ex areas).
0198441113843, V1.01, 01.2012
Modbus-TCP module 11
2 Before you begin - safety information
2.3 Hazard categories
Safety instructions to the user are highlighted by safety alert symbols
in the manual. In addition, labels with symbols and/or instructions are
attached to the product that alert you to potential hazards.
Depending on the seriousness of the hazard, the safety instructions
are divided into 4 hazard categories.
DANGER indicates an imminently hazardous situation, which, if not
avoided, will result in death or serious injury.
WARNING indicates a potentially hazardous situation, which, if not
avoided, can result in death, serious injury, or equipment damage.
CAUTION indicates a potentially hazardous situation, which, if not
avoided, can result in injury or equipment damage.
LXM32M
DANGER
WARNING
CAUTION
CAUTION
CAUTION used without the safety alert symbol, is used to address
practices not related to personal injury (e.g. can result in equipment
damage).
12 Modbus-TCP module
0198441113843, V1.01, 01.2012
LXM32M
2.4 Basic information
2 Before you begin - safety information
WARNING
LOSS OF CONTROL
•
The designer of any control scheme must consider the potential
failure modes of control paths and, for certain critical functions,
provide a means to achieve a safe state during and after a path
failure. Examples of critical control functions are emergency stop,
overtravel stop, power outage and restart.
•
Separate or redundant control paths must be provided for critical
functions.
•
System control paths may include communication links. Consideration must be given to the implication of unanticipated transmission delays or failures of the link.
•
Observe all accident prevention regulations and local safety
guidelines.
•
Each implementation of the product must be individually and thoroughly tested for proper operation before being placed into service.
Failure to follow these instructions can result in death or serious injury.
1)
1)
For USA: Additional information, refer to NEMA ICS 1.1 (latest edition), “Safety
Guidelines for the Application, Installation, and Maintenance of Solid State Control”
and to NEMA ICS 7.1 (latest edition), “Safety Standards for Construction and Guide
for Selection, Installation and Operation of Adjustable-Speed Drive Systems”.
0198441113843, V1.01, 01.2012
Modbus-TCP module 13

2 Before you begin - safety information
2.5 Standards and terminology
Technical terms, terminology and the corresponding descriptions in
this manual are intended to use the terms or definitions of the pertinent standards.
In the area of drive systems, this includes, but is not limited to, terms
such as "safety function", "safe state", "fault", "fault reset", "failure",
"error", "error message", "warning", "warning message", etc.
Among others, these standards include:
•
IEC 61800 series: "Adjustable speed electrical power drive systems"
•
IEC 61158 series: "Industrial communication networks - Fieldbus
specifications"
•
IEC 61784 series: "Industrial communication networks - Profiles"
•
IEC 61508 series: "Functional safety of electrical/electronic/
programmable electronic safety-related systems"
Also see the glossary at the end of this manual.
LXM32M
14 Modbus-TCP module
0198441113843, V1.01, 01.2012
LXM32M
3 Basics
3.1 Modbus TCP technology
3.1.1 Function principle
Modbus TCP is an Ethernet fieldbus. Modbus TCP describes the
transmission of the Modbus protocol via the Ethernet interface and the
TCP/IP transport and network layers.
The Modbus TCP client (master) connects to the Modbus TCP server
(slave). Once the connection is established, the client sends Modbus
requests to the server. These requests are processed by the server.
The result is returned to the client as a Modbus response.
3 Basics
3
3.1.2 Bus topology
The Modbus TCP services are identical to the Modbus RTU services.
Star and tree topologies can be used. It is possible to use hubs or
switches. In the case of high bus loads with many devices, it is recommended to use a switches.
The maximum length of a segment is 100 m. A segment consists of
devices and hubs. A network can be subdivided into several segments
by means of gateways or switches. Short cables and a star topology
are recommended to achieve a fast bus cycle.
The transmission rate is 10 or 100 MBit/s in half-duplex mode. If
switches are used, transmission is also possible in full duplex mode.
0198441113843, V1.01, 01.2012
Modbus-TCP module 15

Modbus Client
Modbus Server
Request Indication
Response
Confirmation
3 Basics
3.1.3 Client / server model
LXM32M
Figure 2: Client / server model
The Modbus messaging service implements client/server communication between devices connected by means of a TCP/IP network. Modbus TCP does not use an object dictionary.
The client/server model is based on 4 types of messages:
•
Request: Message sent by the client to initiate a transaction.
•
Indication: Request as received by the server.
•
Response: Response message to the request sent by the server.
•
Confirmation: Response as received by the client.
A communication cycle consists of the request from the client (request
from the fieldbus master) and a response from the server (response
from the fieldbus slave). Modbus request and Modbus response have
the same structure. If an error occurs on receipt of the Modbus
request or if the slave cannot execute the action, the slave sends an
error message in the Modbus response.
3.1.4 Network service SNMP
SNMP agent ConneXview The product supports SNMP version 1.0. An SNMP agent must be
The product analyzes the Modus requests received. Depending on the
Modbus request, the product triggers actions or provides requested
data.
The Internet community has developed the SNMP standard "Simple
Network Management Protocol" to support the management of different network devices by means of a single system.
The Network Management System can exchange data with SNMP
devices. The tasks of the network management system comprise
monitoring, control and configuration of network components as well
as error detection and error messaging.
used to monitor a network with SNMP. Schneider Electric offers the
tool ConneXview for such purposes.
16 Modbus-TCP module
0198441113843, V1.01, 01.2012
Function code DataMBAP Header
MODBUS PDU
MODBUS TCP/IP ADU
LXM32M
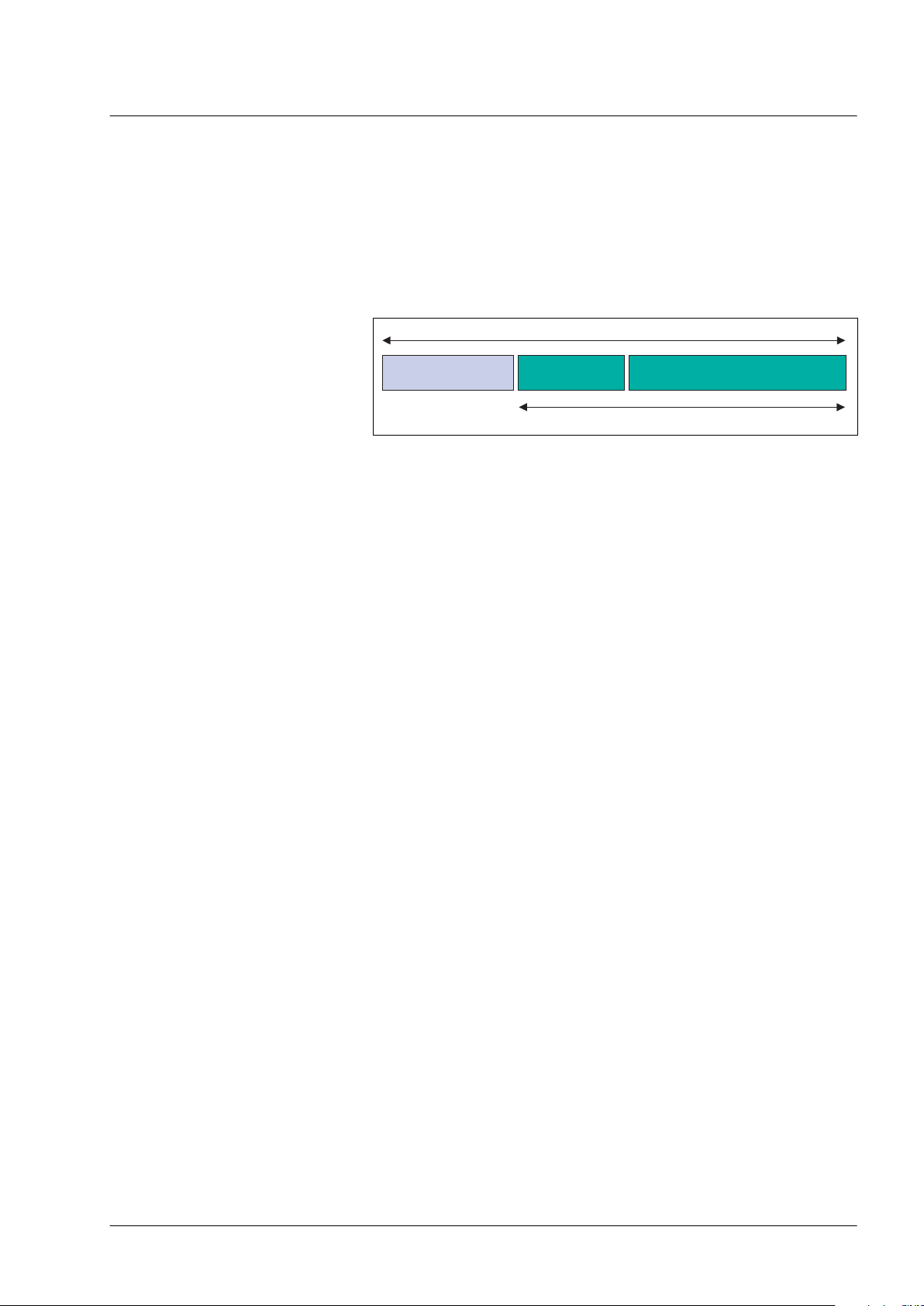
3.2 Modbus TCP protocol
The Modbus protocol defines a so-called Modbus PDU (Protocol Data
Unit) which is independent of the underlying communication layers.
This Modbus PDU consists of the fields "Function Code" and "Data".
Depending on the mapping to the different network protocols, the
Modbus PDU is extended by additional fields in the so-called Modbus
ADU (Application Data Unit). The Modbus PDU and the Modbus ADU
constitute the Modbus message, also referred to as "Frame".
Figure 3: Structure of a Modbus message
The "Function Code" of a message specified the Modbus service to be
triggered. The "Data" field can contain additional information, depending on the "Function Code".
3 Basics
Due to the encapsulation of "Function Code" and "Data" in the Modbus PDU, the Modbus services and the object model can be the same
in the case of all Modbus versions.
In the case of a "Function Code" for which the "Data" field in the Modbus PDU has a fixed length, the "Function Code" is sufficient.
In the case of a "Function Code" for which the "Data" field in the Modbus request or the Modbus response has a variable amount of data,
the "Data" field contains a byte counter.
The maximum size of a Modbus ADU is 260 bytes. The size of an
embedded Modbus PDU is 253 bytes.
NOTE: The fields are encoded in Big Endian format (highest-value
byte first).
0198441113843, V1.01, 01.2012
Modbus-TCP module 17
3 Basics
3.2.1 MBAP header
LXM32M
The MBAP header contains the information allowing the recipient to
uniquely identify a message. This is even possible if a message is split
into several packets for transmission.
Explicit and implicit length rules as well as the use of a CRC-32 error
check code (on Ethernet) results in an infinitesimal chance of undetected corruption to a request or response message.
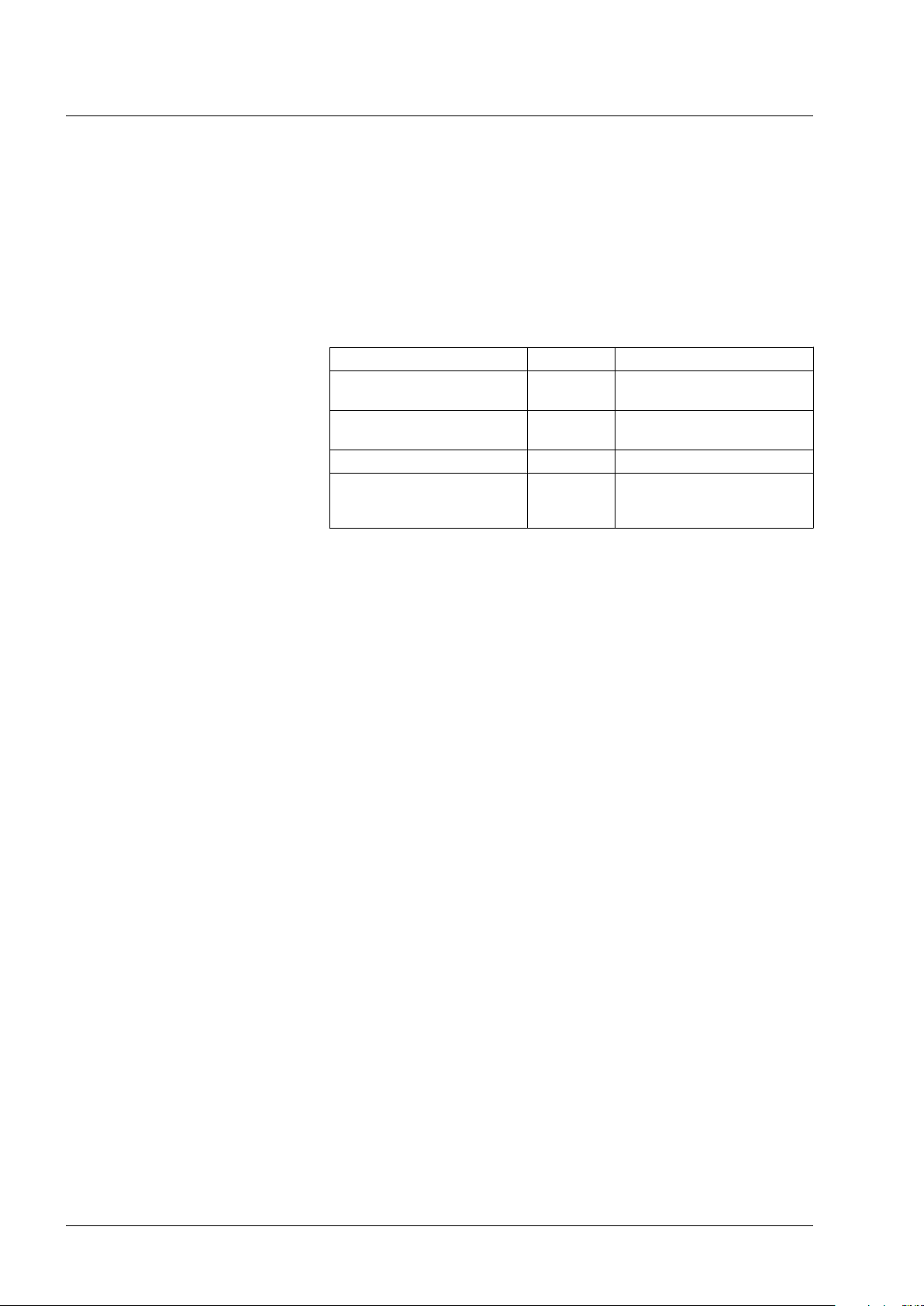
Design The MBAP header has a length of 7 bytes and contains the following
fields:
Field Length Description
Transaction Identifier 2 bytes Identification of a Modbus
request or Modbus response.
Protocol Identifier 2 bytes Value 0 means Modbus proto-
col.
Length 2 bytes Number of bytes to follow.
Unit Identifier 1 byte Identification of a slave con-
nected to another bus via a
serial line.
•
Transaction Identifier
The field "Transaction Identifier" is used for "Pairing". The server
copies the "Transaction Identifier" of the Modbus request to the
Modbus response.
•
Protocol Identifier
The field "Protocol Identifier" is used to identify the protocol. The
Modbus protocol is identified by the value 0.
•
Length
The "Length" field is a byte counter for the following fields ("Unit
Identifier", "Function Code" and "Data").
•
Unit Identifier
The field "Unit Identifier" is used to identify the server in the slave.
18 Modbus-TCP module
0198441113843, V1.01, 01.2012
LXM32M
3.3 Modbus TCP communication
3.3.1 Connection management
Establishing of a connection The Modbus TCP server allows for TCP connections via the default
port 502. A client can establish a new connection via this port. If the
client is to exchange data with a remote server, a new client connection via remote port 502 must be established.
Modbus data transfer A Modbus request is sent via a suitable, open connection. This TCP
connection is found using the IP address of the remote device. The
connection remains open for all Modbus communication. Up to 8
simultaneous connections are possible.
As described in the next chapter, a Modbus client can initialize several
Modbus transactions without having to wait for the previous transaction to be finished.
Closing a connection After the Modbus communication between the client and a server is
finished, the client causes the connection used to be closed.
The server does not close the connection under normal circumstances.
3 Basics
However, when errors occur and in special cases, the server closes
the connection, for example:
•
Communication errors
•
Communication inactivity
•
Maximum number of connections reached
The product can manage up to 8 TCP connections. If an attempt is
made to establish a further connection beyond this maximum, the oldest unused connection is closed. If it is impossible to close the oldest
unused connection, the new connection is refused.
0198441113843, V1.01, 01.2012
Modbus-TCP module 19

3 Basics
3.3.2 Modbus response to a Modbus request
The Modus server generates a Modbus response after having processed a Modbus request.
Depending on the type of processing, two types of Modbus responses
are possible:
•
Positive Modbus response
-
The "Function Code" in the Modbus response corresponds to
the "Function Code" in the Modbus request.
•
Negative Modbus response
-
The client receives pertinent information on error detection during processing;
-
The "Function Code" in Modbus response corresponds to the
"Function Code" in the Modbus request + 80h.
-
The "Exception Code" indicates the cause of the error.
If a syntactically incorrect Modbus PDU (Protocol Data Unit) is transmitted, the connection is terminated. In the case of other other error, a
negative Modbus response is sent.
LXM32M
Exception Code
01 Illegal Function Code The "Function Code" is unknown to the
02 Illegal Data Address Depends on the Modbus request
03 Illegal Data Value Depends on the Modbus request
04 Server Failure The server was unable to properly termi-
05 Acknowledge The server has accepted the Modbus
06 Server Busy The server was unable to accept the
0A Gateway Problem The gateway path is unavailable.
0B Gateway Problem The targeted device does not respond.
Name Description
server.
nate processing.
request. However, the execution takes a
relatively long time. The server therefore
only returns an acknowledgement confirming receipt of the service request.
Modbus request. It is the responsibility of
the application on the client to determine
whether and when to re-send the request.
The gateway generates this error.
20 Modbus-TCP module
0198441113843, V1.01, 01.2012
LXM32M
3.3.3 Reading and writing parameters
Parameters are processed as 32 bit values. 16 bit values must also be
processed as 32 bit values. Two consecutive 16 bit parameters must
be read or written to process a 16 bit parameter. The first Modbus
address must be specified.
If several consecutive parameters are to be processed, a single Modbus command with the corresponding Modbus address and the length
indication is sufficient.
NOTE: This does not apply to reading and writing parameters with
addresses in the range from 17408 (4400h) to 17663 (44FFh). In this
range, only a single parameter can be addressed with one Modbus
command.
Example Reading the parameter CTRL1_KPp "Position controller P gain"
Modbus address 4614
When the parameter CTRL1_KPp with the Modbus parameter address
4614 and length 2 is read, the two parameter addresses 4614 and
4615 are read. Result:
Address Value
4614 0000
4615 00C8
3 Basics
h
h
0198441113843, V1.01, 01.2012
Modbus-TCP module 21

3 Basics
3.3.4 I/O scanning to "Drive Profile Lexium"
I/O scanning is used for cyclic interchange of data between master
and slave.
I/O scanning must be configured on the master. The master can use 2
different approaches for of I/O scanning:
•
"Function Code" 23 (17h), Read-Write Mulitple Registers
•
"Function Code" 3 (03h), Read Multiple Registers and "Function
Code" 16 (10h), Write Multiple Registers
NOTE: The read value is 0 until the first write command is executed.
Settings The following setting must be made on the master before you can use
I/O scanning:
•
The "Unit Identifier" is 255.
•
The Modbus parameter address is 0.
•
The data length is 13.
In addition, you can use up to 3 mappable parameters. If these
parameters are used, the data length changes to 15, 17 or 19.
LXM32M
The Modbus addresses for I/O scanning do not differ from the
addresses for normal Modbus access.
Output - Input Output and input refer to the direction of data transmission from the
perspective of the master.
•
Output: Commands from the master to the slave
•
Input: Status messages from the slave to the master
22 Modbus-TCP module
0198441113843, V1.01, 01.2012
LXM32M
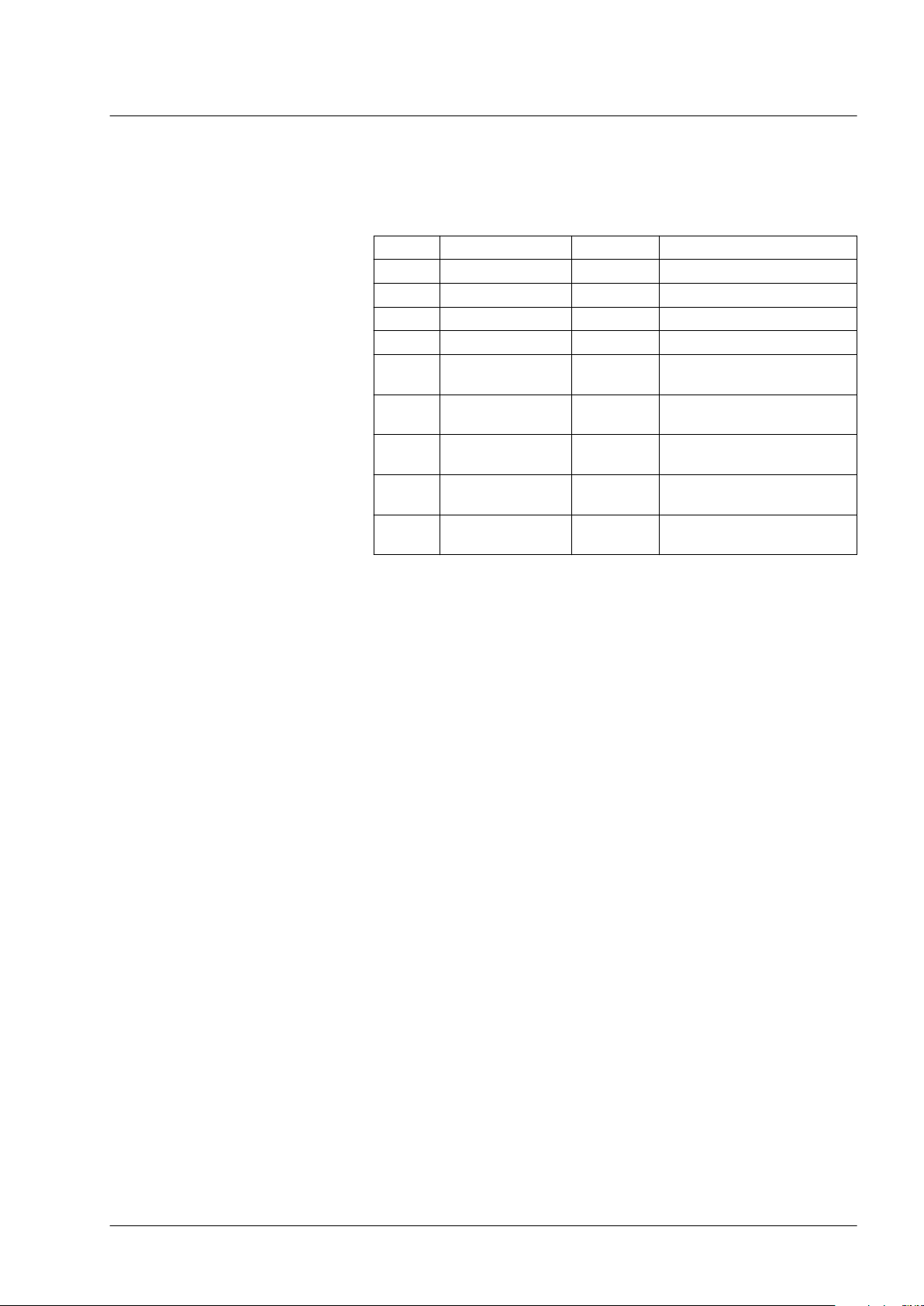
3.3.4.1 I/O scanning Output
3 Basics
The table below shows the structure of the cyclic data for the commands from the master to the product. See the product manual for a
description of the parameters.
Byte Meaning Data type Parameter address
0 ... 7 ParCh - Parameter channel
8 ... 9 dmControl INT -
10 ... 13 RefA32 DINT -
14 ... 17 RefB32 DINT -
18 ... 21 Ramp_v_acc DINT Parameter Ramp_v_acc
Modbus 1556
22 ... 25 Ramp_v_dec DINT Parameter Ramp_v_dec
Modbus 1558
26 ... 29 EthOptMapOut1 DINT Parameter EthOptMapOut1
Modbus 17500
30 ... 33 EthOptMapOut2 DINT Parameter EthOptMapOut2
Modbus 17502
34 ... 37 EthOptMapOut3 DINT Parameter EthOptMapOut3
Modbus 17504
ParCh Parameters can be read or written via "ParCh", see chapter
"3.3.4.3 Parameter channel".
dmControl The word "dmControl" is used to set the operating state and the oper-
ating mode.
See chapters "6.1.2 Changing the operating state" and
"6.2.2 Starting and changing an operating mode" for a detailed
description of the bits.
RefA32, RefB32 The two double words "RefA32" and "RefB32" are used to set two val-
ues for the operating mode. The meaning depends on the operating
mode; it is described in the chapters on the individual operating
modes.
Ramp_v_acc / Ramp_v_dec The double words "Ramp_v_acc" and "Ramp_v_dec" are used to set
the acceleration and the deceleration. They correspond to the parameters of the same name. See the product manual for a description.
EthOptMapOut1 ... EthOptMap-
Out3
The double words EthOptMapOut1 ... EthOptMapOut3 contain selectable parameters, see chapter
"5.7.3 Setting the mapping for I/O scanning".
0198441113843, V1.01, 01.2012
Modbus-TCP module 23
3 Basics
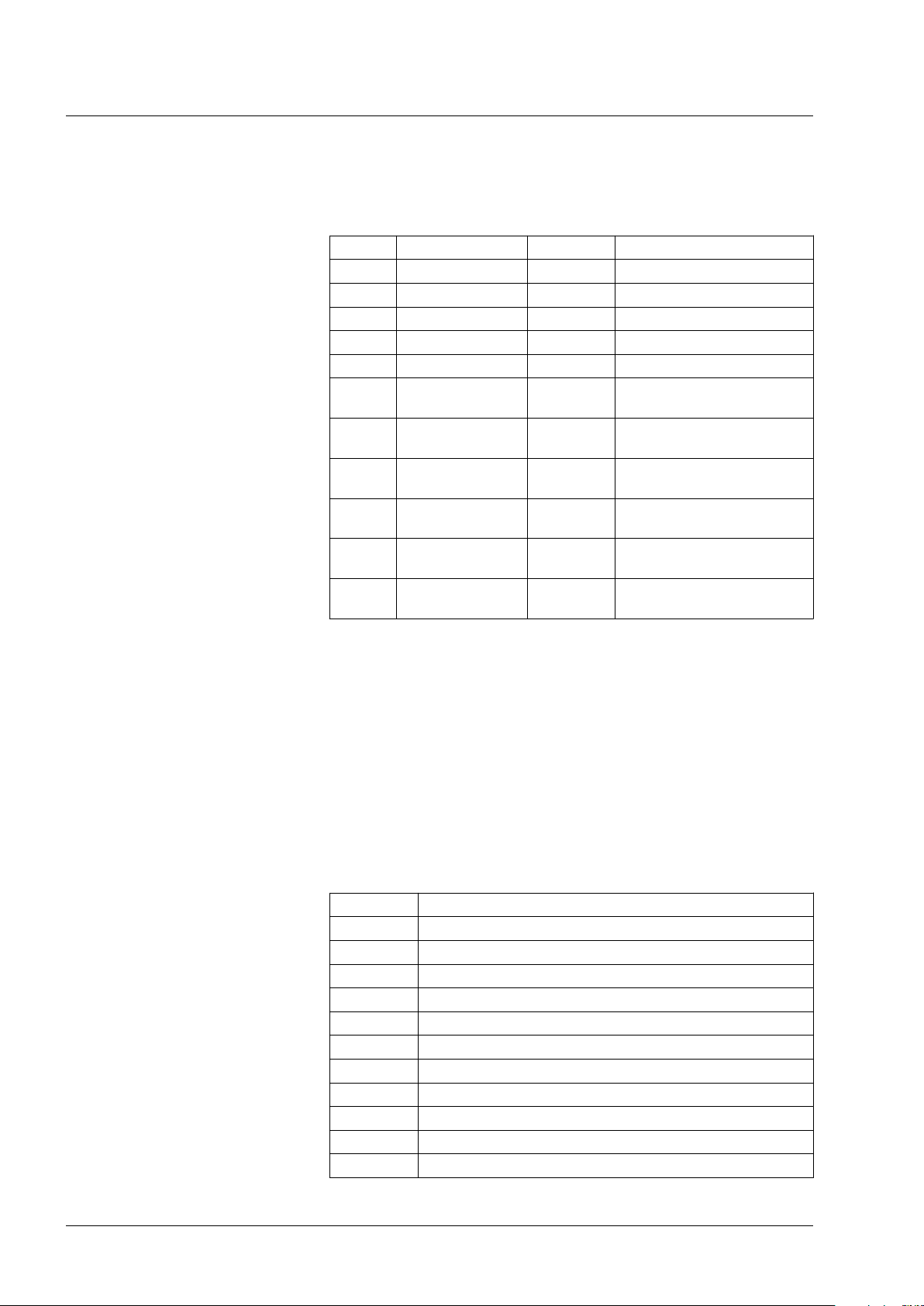
3.3.4.2 I/O scanning Input
LXM32M
The table below shows the structure of the cyclic data for the status
messages from the product to the master. See the product manual for
a description of the parameters.
Byte Meaning Data type Parameter address
0 ... 7 ParCh - Parameter channel
8 ... 9 driveStat INT -
10 ... 11 mfStat INT -
12 ... 13 motionStat INT -
14 ... 15 driveInput INT -
16 ... 19 _p_act DINT Parameter _p_act
Modbus 7706
20 ... 23 _v_act DINT Parameter _v_act
Modbus 7744
24 ... 25 _I_act INT Parameter _I_act
Modbus 7686
26 ... 29 EthOptMapInp1 DINT Parameter EthOptMapInp1
Modbus 17512
30 ... 33 EthOptMapInp2 DINT Parameter EthOptMapInp2
Modbus 17514
34 ... 37 EthOptMapInp3 DINT Parameter EthOptMapInp3
Modbus 17516
ParCh Parameters can be read or written via "ParCh", see chapter
"3.3.4.3 Parameter channel".
driveStat The current operating state is indicated with the "driveStat" word.
For a detailed description of the bits, see chapter
"6.1.1 Indication of the operating state".
mfStat The word "mfStat" is used to indicate the current operating mode.
For a detailed description of the bits, see chapter
"6.2.1 Indicating and monitoring the operating mode".
motionStat The word "motionStat" is used to provide information on the motor and
profile generator.
bit Meaning
0 ... 5 Reserved
6 MOTZ: Motor at a standstill
7 MOTP: Motor movement in positive direction
8 MOTN: Motor movement in negative direction
9 PWIN: Motor within position window
10 Reserved
11 TAR0: Profile generator at standstill
12 DEC: Profile generator decelerates
13 ACC: Profile generator accelerates
14 CNST: Profile generator moves at constant velocity
15 Reserved
24 Modbus-TCP module
0198441113843, V1.01, 01.2012

LXM32M
3 Basics
driveInput The word "driveInput" is used to indicate the status of the digital signal
inputs.
bit Signal Factory setting
0
1
2
3
4
5
6 ... 15
_p_act The double word "_p_act" indicates the actual position. The value cor-
responds to the parameter _p_act.
_v_act The double word "_v_act" indicates the actual velocity. The value cor-
responds to the parameter _v_act.
_I_act The word "_I_act" is used to provide information on the total motor
current. The value corresponds to the parameter _I_act.
DI0
DI1
DI2
DI3
DI4
DI5
-
Signal input function Freely Available
Signal input function Reference Switch (REF)
Signal input function Positive Limit Switch (LIMP)
Signal input function Negative Limit Switch (LIMN)
Signal input function Freely Available
Signal input function Freely Available
Reserved
EthOptMapInp1 ... EthOptMapInp3 The double words EthOptMapInp1 ... EthOptMapInp3 contain selecta-
ble parameters. The product manual provides descriptions of the
parameters EthOptMapInp1 ... EthOptMapInp3 which explain parameter mapping.
0198441113843, V1.01, 01.2012
Modbus-TCP module 25
 Loading...
Loading...