


 Loading...
Loading...
Cat. No. I533-FR1-01
SmartStep série A
R7M-A_ (Servomotors)
R7D-AP_ (Servo Drivers)
Servomotors/Servodrivers
MANUEL D’UTILISATION
Présentation
2 Modèles et spécifications
3 Conception et installation du système
4 Fonctionnement
5 Dépannage
Advanced Industrial Automation
Nous sommes heureux que vous ayez choisi un produit SMARTSTEP de la série A. Une utilisation et une manipulation correctes de l’appareil garantissent des performances optimales de l’appareil, une longue durée de vie de l’appareil et favorise la prévention d’accidents.
Veuillez lire consciencieusement ce manuel et manipuler votre appareil avec soin. Veuillez conserver ce manuel à portée de la main afin de pouvoir le consulter en cas de besoin.
REMARQUES UTILES
1.Ce manuel décrit l’installation, le câblage le configuration des interrupteurs et le dépannage des servomoteurs SMARTSTEP de série A et des variateurs. Pour toutes informations supplémentaires sur les procédures nécessitant une console de paramétrage, veuillez vous reporter au Manuel de l’utilisateur du servomoteur SMARTSTEP série A (I534).
2.Vérifiez que ce manuel a bien été remis à l’utilisateur final.
3.Malgré tout le soin apporté à la documentation de ce produit, veuillez contactez votre représentant OMRON pour toute suggestion au sujet de ce manuel.
4.Tout ce qui n’est pas décrit dans ce manuel est interdit.
5.Il est interdit de faire raccorder, allumer ou utiliser le servomoteur ou la servocommande (à partir d’une console de paramétrage) par une personne non qualifiée en électricité ou dans un domaine semblable.
6.Nous vous recommandons de joindre les consignes suivantes à tous les manuels d’instructions que vous préparez pour le système dans lequel l’appareil est installé.
•Soyez attentif aux dangers des équipements de surtension.
•Faites attention en touchant aux terminaux de l’appareil, même lorsque vous avez coupé l’alimentation électrique (les terminaux peuvent rester sous tension même sans alimentation électrique).
7.Sous réserve de modifications des spécifications techniques et des fonctions, sans préavis, en vue de perfectionner l’appareil.
8.Les circulations positive et négative du servomoteur en c.a. décrites dans ce manuel, sont définies quand on regarde l’extrémité de l’arbre de sortie du moteur : le sens des aiguilles d’une montre correspond au sens positif et le sens inverse au sens négatif.
9.N’effectuez aucun test de résistance ou autres tests mégamétriques sur l’appareil. Vous risquez sinon d’endommager des composants internes.
10.Le servomoteur et de la servocommande ont une durée de vie précise. Respectez les délais de remplacement des éléments de l’appareil et faites effectuer ses remplacements en respectant l’environnement et la législation en vigueur.
11.Ne réglez pas les paramètres sur des valeurs non indiquées dans ce manuel. Vous risquez de provoquer des dysfonctionnements. En cas de doute, demandez conseil à votre revendeur OMRON.
12.Avant d'utiliser ce produit dans des conditions non décrites dans ce manuel ou de l'utiliser avec des systèmes de pilotage d'installations nucléaires, des chemins de fer, des systèmes aéronautiques, des véhicules, des systèmes à combustion, des équipements médicaux, des machines et des appareils de divertissement, des équipements de sécurité ainsi qu'avec d'autres systèmes, machines et équipements exerçant une forte influence sur la vie humaine et les biens s'ils sont utilisés incorrectement, veuillez consulter votre revendeur OMRON.
A vérifier avant le déballage
1.Veuillez vérifier les points suivants avant de retirer votre appareil de son emballage.
•Avez-vous reçu le bon produit (vérifier le type de modèle, les spécifications techniques) ?
•L’appareil a-t-il subi des dommages pendant le transport ?
2.Vérifiez que les accessoires suivants ont été joints à l’emballage.
•Consignes de sécurité
Aucun connecteur ou vis de montage n’est fourni. Ils sont fournis séparément.
Avis :
Les produits OMRON sont conçus pour une utilisation normale de l'appareil par un personnel qualifié et pour les applications décrites dans le présent manuel seulement.
Les conventions suivantes sont utilisées dans ce manuel pour indiquer et classer les précautions par catégories. Lisez toujours attentivement les informations fournies. Le non-respect de ces précautions peut entraîner des blessures ou des dégâts matériels.
! DANGER
Indique une situation dangereuse imminente qui, si elle n'est pas évitée, peut provoquer la mort ou des blessures graves.
! AVERTISSEMENT Indique une situation potentiellement dangereuse qui, si elle n'est pas évitée, peut provoquer la mort ou des blessures graves.
! Attention Indique une situation potentiellement dangereuse qui, si elle n'est pas évitée, peut provoquer des blessures mineures à modérées ou des dégâts matériels.
Informations sur les produits OMRON
Tous les produits OMRON sont écrits avec une majuscule en guise d'initiale dans ce manuel. Le mot "unité" est également écrit en majuscules lorsqu'il fait référence à un produit OMRON, sous forme de nom propre ou de nom commun.
L'abréviation "Ch" qui apparaît dans certains affichages et dans certains produits OMRON signifie "caractère" et est abrégée par "ca" dans le manuel.
L'abréviation "API" signifie Automate programmable industriel et n'est jamais utilisée comme abréviation d'un autre système, composant ou élément.
Aides visuelles
Les en-têtes suivants apparaissent à droite du texte dans le manuel pour vous permettre d'identifier plus facilement les types d'informations indiqués :
Remarque Indique qu'il s'agit d'informations surtout intéressantes pour une utilisation efficace et pratique du produit.
OMRON, 2001
Tous droits réservés. Il est strictement interdit reproduire, enregistrer dans un système de récupération ou transmettre la moindre information de ce manuel, quelle que soit la forme ou le support utilisé (mécanique, électrique, photocopie, enregistrement audio) sans l'autorisation expresse d'OMRON.
Ce manuel ne vous donne pas le droit d'utiliser les informations contenues dans le manuel régies par brevet. De plus, dans un souci d'amélioration constante de la qualité de ses produits, OMRON se réserve le droit de modifier sans préavis toute information contenue dans ce manuel. Malgré tout le soin apporté à l'élaboration de ce manuel, OMRON décline toute responsabilité quant aux erreurs et omissions qui pourraient s'y trouver. Enfin, OMRON décline toute responsabilité concernant tout dommage résultant de l'utilisation des informations contenues dans ce manuel.
Mises en gardes générales
Respecter les mises en garde suivantes lors de l'utilisation du servomoteur et de la servocommande SMARTSTEP et de tous les périphériques et appareils raccordés.
Ce manuel peut comprendre des illustrations du produit sans capot de protection pour décrire en détail les composants du produit. Avant d'utiliser le produit, veillez à ce que ces capots de protection soient posés.
Avant d'utiliser le produit après un arrêt prolongé, consultez votre représentant OMRON.
! AVERTISSEMENT Connecter systématiquement les bornes de terre de la servocommande et du servomoteur à la terre de classe 3 (de 100 Ω ou moins). Une connexion non correcte à la terre de classe 3 peut provoquer une décharge électrique.
! AVERTISSEMENT Ne jamais mettre les mains dans la servocommande sous peine de recevoir une décharge électrique.
! AVERTISSEMENT Ne pas déposer le capot avant, les capots des bornes, les câbles et les éléments en option lorsque le produit est sous tension sous peine de recevoir une décharge électrique.
! AVERTISSEMENT L'installation, le fonctionnement, la maintenance ou le contrôle de pièces doivent être effectués par du personnel qualifié. Le non-respect de cette instruction vous expose à des risques d'électrocution ou à des blessures.
! AVERTISSEMENT Attendre au moins cinq minutes après avoir mis le composant hors tension (OFF) avant d'effectuer les travaux de raccordement ou de contrôle sous peine de recevoir une décharge électrique.
! AVERTISSEMENT Ne pas endommager, appuyer ou appliquer une pression ou placer des objets lourds sur les câbles sous peine de recevoir une décharge électrique.
! AVERTISSEMENT Ne pas toucher les pièces en rotation du servomoteur pendant le fonctionnement. Risque de blessures.
! AVERTISSEMENT Ne pas modifier le produit. Risque de blessures ou d'endommagement du produit.
! AVERTISSEMENT Placer un mécanisme d'arrêt d'urgence de l'appareil. Le frein de maintien ne doit pas servir de mécanisme d'arrêt d'urgence.
! AVERTISSEMENT Placer un mécanisme d'arrêt d'urgence externe qui permet un arrêt immédiat du fonctionnement et une coupure d'alimentation. Le non-respect de cette instruction peut provoquer des blessures.
! AVERTISSEMENT Ne pas s'approcher de l'appareil directement après avoir réinitialisé une interruption momentanée de courant afin d'éviter un redémarrage intempestif. (Prendre des mesures de sécurité adéquates pour éviter un redémarrage intempestif). Risque de blessures.
! Attention Utiliser les servomoteurs et les servocommandes ensembles, de manière appropriée. Le non-respect de cette instruction peut provoquer un incendie ou endommager le produit.
! Attention Ne pas stocker ou installer le produit dans les endroits suivants. Le non-respect de cette instruction peut provoquer des décharges électriques ou endommager le produit.
•Endroits exposés à la lumière directe du soleil.
•Endroits soumis à des températures ou une humidité en dehors des valeurs établies dans les spécifications.
•Endroits soumis à la condensation due à des changements de températures extrêmes.
•Endroits pouvant contenir des gaz corrosifs ou inflammables.
•Endroits soumis aux poussières (spécialement poussière de métaux) ou à des sels.
•Endroits soumis à des chocs ou des vibrations importantes.
•Endroits pouvant contenir de l'eau, de l'huile ou des produits chimiques.
!Attention Ne pas toucher le radiateur de la servocommande, la résistance régénératrice de
la servocommande ou le servomoteur pendant qu'ils sont sous tension ou peu après avoir coupé l'alimentation électrique. Le contact de la surface chaude pourrait provoquer des brûlures.
Précautions à prendre au moment du stockage et du transport
! Attention Ne pas tenir le produit par les câbles ou l'arbre du moteur pendant le transport. Risque de blessures ou de dysfonctionnements.
! Attention Ne pas poser une charge dont le poids excède le chiffre indiqué sur le produit. Risque de blessures ou de dysfonctionnements.
Précautions à prendre au moment de l'installation et du raccord des câbles
!Attention Ni placer ni faire tomber d'objets lourds sur le produit. Risque de blessures.
!Attention Ne pas couvrir les ports d'entrée ou de sortie et empêcher que des corps
étrangers pénètrent dans le produit. Cela pourrait provoquer un incendie.
! Attention Prendre soin d'installer le produit dans la bonne direction. Le non-respect de cette instruction peut endommager l'appareil.
! Attention Laisser suffisamment d'espace entre la servocommande et l'armoire de commande ou les autres appareils. Le non-respect de cette instruction risque de provoquer un incendie ou un dysfonctionnement.
!Attention Ne pas exercer de fortes pressions. Cela peut provoquer des dysfonctionnements.
!Attention S'assurer que le câblage est correct et effectué en toute sécurité. Le non-respect
de cette instruction peut provoquer un emballement du moteur, des blessures ou des dysfonctionnements.
! Attention S'assurer que toutes les bornes et les connecteurs de câbles sont serrés au couple prescrit dans les manuels. Un serrage avec un couple incorrect peut provoquer des dysfonctionnements.
! Attention Utiliser des bornes de câble serti pour le câblage. Ne raccorder pas directement des fils nus à des bornes. Le raccordement de fils toronnés nus peut provoquer un incendie.
! Attention Toujours utiliser la tension d'alimentation prescrite dans le manuel d'utilisation. Une tension incorrecte peut provoquer des dysfonctionnements ou un incendie.
! Attention Prendre les mesures appropriées pour s'assurer que la puissance indiquée est conforme à la tension et la fréquence utilisées. Faites particulièrement attention aux endroits où l'alimentation est instable. Une alimentation électrique incorrecte peut provoquer des dysfonctionnements.
! Attention Poser des interrupteurs externes et prendre également d'autres mesures de sécurité contre les courts-circuits dans le câblage externe. Des mesures de sécurité insuffisantes contre les courts-circuits peuvent provoquer un incendie.
! Attention Prendre des mesures appropriées lors de l'installation des systèmes dans les endroits suivants. Le non-respect de cette instruction peut endommager le produit.
•Endroits soumis à une électricité statique ou à d'autres formes de bruits parasites.
•Endroits soumis à de forts champs électromagnétiques et magnétiques.
•Endroits pouvant être exposés à la radioactivité.
•Endroits proches de sources d'alimentation.
Précautions de fonctionnement et de réglage
! Attention S'assurer que le système ne sera pas perturbé avant de tester son fonctionnement. Le non-respect de cette instruction pourrait endommager l'appareil.
! Attention Contrôler les derniers paramètres réglés et les interrupteurs pour savoir s'ils fonctionnent parfaitement avant de les utiliser. Le non-respect de cette instruction pourrait endommager l'appareil.
! Attention Ne pas procéder à des réglages radicaux ou modifier des réglages. Cela peut provoquer un fonctionnement instable ou des blessures.
! Attention Déposer le servomoteur de l'appareil, contrôler son fonctionnement puis le rebrancher sur l'appareil. Le non-respect de cette instruction peut provoquer des blessures.
! Attention Si une alarme se déclenche, supprimer la cause, réinitialiser l'alarme après avoir vérifié le système puis reprendre l'exploitation. Le non-respect de cette instruction peut provoquer des blessures.
! Attention Ne pas utiliser le frein intégré du servomoteur pour freiner normalement. Cela peut provoquer des dysfonctionnements.
Maintenance et inspection
! AVERTISSEMENT N'essayer jamais de démonter, réparer ou modifier une carte UC sous peine de provoquer un dysfonctionnement, un incendie ou une décharge électrique.
! Attention Reprendre l'exploitation uniquement après avoir transféré dans la nouvelle unité le contenu des données nécessaire pour l'exploitation. Le non-respect de ces précautions peut engendrer un fonctionnement intempestif.
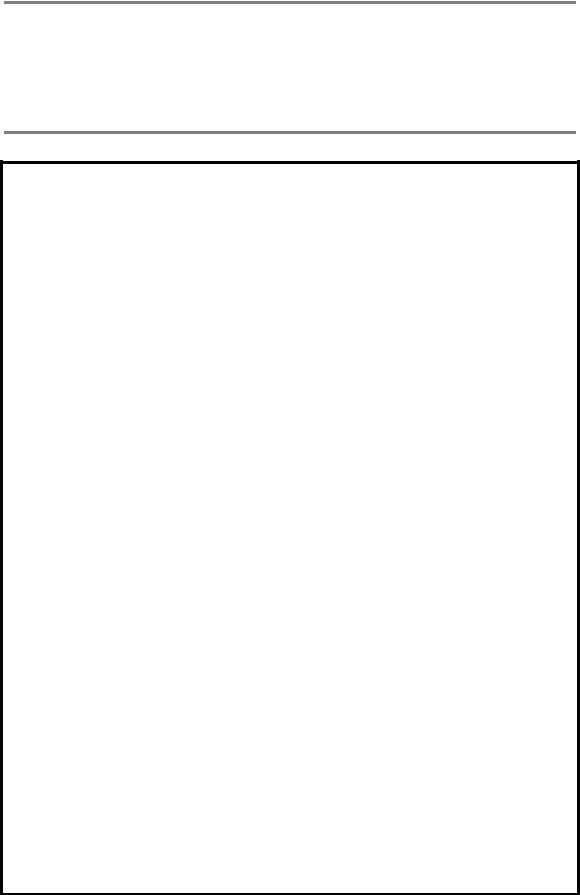
Autocollants d'avertissement
Les autocollants d'avertissement sont apposés sur le produit comme illustré ci-dessous : Veillez à respecter les instructions données.
Étiquette
d'avertissement
Exemple de R7D-AP01L
Exemple de R7D-AP01L
|
|
|
Sommaire |
|
|
|
|
|
|
||
Chapitre 1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
1-1 |
|
|||
|
|
|
|
|
|
1-1 |
Fonctions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
1-2 |
|
||
1-2 |
Configuration du système. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
1-4 |
|
||
1-3 |
Nomenclature des servomoteurs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
1-5 |
|
||
1-4 |
Normes applicables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
1-6 |
|
||
1-5 |
Schémas du système . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
1-7 |
|
||
|
|
|
|
||
Chapitre 2. Modèles et spécifications. . . . . . . . . . . . . . . . . . . . . . . . . |
2-1 |
|
|||
|
|
|
|
|
|
2-1 |
Modèles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
2-2 |
|
||
2-2 |
Dimensions de montage extérieur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
2-5 |
|
||
2-3 |
Caractéristiques techniques des servomoteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
2-16 |
|
||
2-4 |
Spécifications du servomoteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
2-30 |
|
||
2-5 |
Spécifications réducteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
2-38 |
|
||
2-6 |
Spécifications connecteur et câble . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
2-42 |
|
||
2-7 |
Spécifications des borniers d'interface et de câbles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
2-52 |
|
||
2-8 |
Spécifications de la console de paramétrage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
2-83 |
|
||
2-9 |
Spécifications de résistance de régénération extérieure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
2-85 |
|
||
2-10 |
Bobines de réactance c.c. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
2-86 |
|
||
|
|
|
|
||
Chapitre 3. Conception et installation du système . . . . . . . . . . . . . . |
3-1 |
|
|||
|
|
|
|
|
|
3-1 |
Conditions d'installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
3-3 |
|
||
3-2 |
Câblage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
3-8 |
|
||
3-3 |
Absorption d’énergie régénérative . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
3-36 |
|
||
|
|
|
|
||
Chapitre 4. Fonctionnement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
4-1 |
|
|||
|
|
|
|
|
|
4-1 |
Procédure de fonctionnement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
4-3 |
|
||
4-2 |
Sélections des boutons . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
4-4 |
|
||
4-3 |
Préparation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
4-7 |
|
||
4-4 |
Test de fonctionnement. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
4-9 |
|
||
4-5 |
Configuration du gain. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
4-11 |
|
||
4-6 |
Paramètres de l'utilisateur. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
4-15 |
|
||
4-7 |
Fonctions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
4-26 |
|
||
|
|
|
|
||
Chapitre 5. Dépannage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
5-1 |
|
|||
|
|
|
|
|
|
5-1 |
En cas de panne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
5-2 |
|
||
5-2 |
Alarmes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
5-5 |
|
||
5-3 |
Correction des erreurs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
5-7 |
|
||
5-4 |
Caractéristiques techniques de surcharge (caractéristiques électrothermiques). . . . . . . . . . . |
5-15 |
|
||
5-5 |
Maintenance périodique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
5-16 |
|
||
|
|
|
|
||
Chapitre 6. Annexe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
6-1 |
|
|||
|
|
|
|
|
|
6-1 |
Exemples de connexion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
6-2 |
|
||
|
|
|
|
||
Révisions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
R-1 |
||||
|
|
|
|
|
|
1
Chapitre 1
Introduction
1-1 Fonctions
1-2 Configuration du système
1-3 Nomenclature des servomoteurs
1-4 Normes applicables
1-5 Schémas du système

|
Introduction |
Chapitre 1 |
|
|
|
|
|
1-1 Fonctions
Les servomoteurs SMARTSTEP A-series ont été conçus comme contrôleurs de position de type de saisie d’impulsions pour remplacer les moteurs pas à pas des systèmes de position simples. Les servomoteurs SMARTSTEP A-series allient l’utilisation facile des moteurs pas à pas et un positionnement rapide permettant une grande rapidité, un couple rapide et une grande fiabilité sans perte de précision de positionnement, même en cas de changements de charge soudains, et bien d’autres propriétés encore.
■ Un temps de réponse et une vitesse de rotation rapides
Les servomoteurs SMARTSTEP A-series disposent des mêmes qualités de rapidité et de couple rapide, impossible à réaliser avec les moteurs pas à pas, que les OMNUC W Series.
Les servomoteurs SMARTSTEP A-series offre une plus grande rapidité de rotation allant jusqu’à 4500 tr/mn, restant constamment manœuvrable à cette vitesse. Avec des couples de sortie plus rapide, jusqu’à 1 s, ces machines offrent des sorties d’env. 300% du couple nominal, permettant même des positionnements de course moyenne ou longue plus rapides.
■ Une précision constante
Une résolution améliorée des encodeurs de la série A (2000 pulsations/rotation) permet de recevoir un feedback de contrôle permettant des opérations en continu sans perte de précision de positionnement, même en cas de changement brusque de la charge ou en cas d’accélération ou de décélération brusque.
■Réglage minimum avec les interrupteurs du panneau avant du servomoteur
Il est possible d’utiliser le SMARTSTEP A Series immédiatement et sans paramétrage intempestif. Les interrupteurs du panneau avant du servomoteur A-series permettent de procéder plus facilement au réglage de la résolution de position ou de modification des fonctions.
● Résolution
Vous pouvez sélectionner la résolution du servomoteur SMARTSTEP A-series à partir des quatre niveaux suivants :
500 impulsions / rotation (0,72°/pas) ; 1000 impulsions / rotation (0,36°/pas) (réglage par défaut); 5000 impulsions / rotation (0,072°/ pas) ou 10 000 impulsions / rotation (0,036° / pas)
● Entrée d'impulsions de commande
Il est possible de régler l’entrée d’impulsions de commande du SMARTSTEP A-series entre CW/CCW (2 impulsions) et SIGN/PULS (impulsion simple) pour adapter le système aux spécifications de sortie du contrôleur de position.
● Frein dynamique
Il est possible de forcer les servomoteurs SMARTSTEP A-series à décélérer jusqu’à l’arrêt complet (RUN OFF) ou lorsqu’une alarme s’est déclenchée.
1-2
Introduction |
Chapitre 1 |
● Réglage du gain
Un interrupteur spécial de rotation du servomoteur SMARSTEP A-series permet de simplifier le réglage du gain. Il est aussi possible d’activer l’autoréglage en ligne avec le clignotement d’un interrupteur et d’adapter plus facilement la réponse à la machine à utiliser.
Remarque L’utilisation d’une console de paramétrage ou d’un PC permet d’utiliser l’appareil et de procéder aux paramétrages nécessaires.
■ Les servomoteurs plats ou en cylindre
Les SMARTSTEP A Series offrent des servomoteurs en cylindre bridé, dotés d’une petite zone de montage et des servomoteurs plats moins longs. La profondeur du servomoteur plat est pratiquement identique à celle des moteurs pas à pas de même capacité de sortie. Il existe des servomoteurs de différentes tailles permettant ainsi de rendre votre équipement plus compact.
■ Une plus grande palette d’appareils de programmation
Vous pouvez opter pour des consoles de paramétrage du SMARTSTEP A-series et des logiciels de surveillance spéciaux. Les logiciels de surveillance spéciaux permettent de procéder au réglage des paramètres, la surveillance de la tension et de la vitesse, des affichages des formes sinusoïdales de tension et de vitesse, la surveillance E/S, de l’autoréglage, du mode pas à pas et autres opérations à partir d’un PC. Il est également possible de procéder à des transferts d’informations avec axes multiples qui règlent les opérations de paramétrage et de surveillance pour les servomoteurs à axes multiples. Pour de plus amples informations, reportez-vous auLogiciel de surveillance PC des servomoteurs (CD-ROM) pour Windows 95/98, version 2.0 (WMON Win Ver.2.0) (n° de cat. SBCE-011).
1-3
|
Introduction |
Chapitre 1 |
|
|
|
|
|
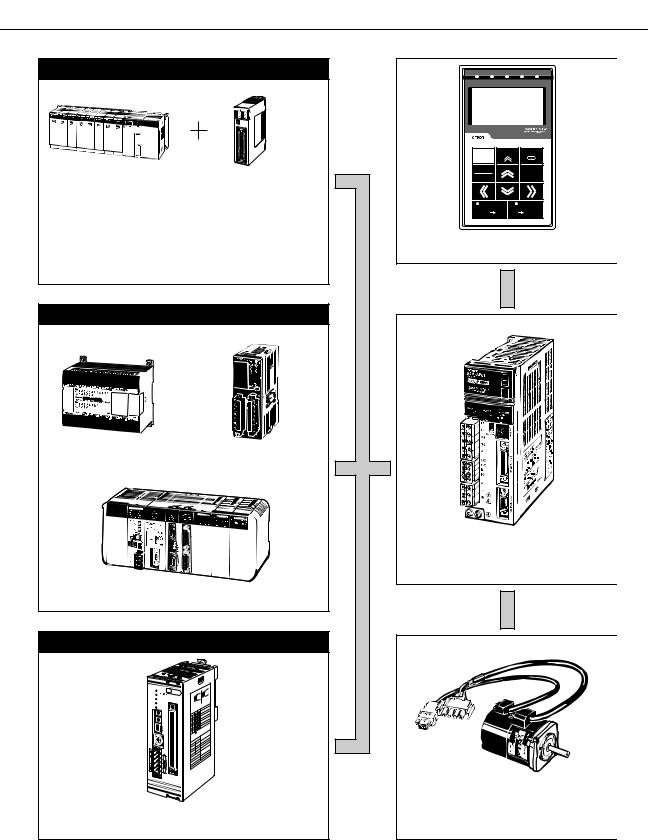
1-2 Configuration du système
SYSMAC + console de paramétrage de position avec sortie d’impulsions
SYSMAC CJ/CS/C/CV Contrôleur programmable
NC413 |
|
|
MACHINE |
|
No. |
CN1 |
CN2 |
Chaîne
d’impulsions
Cartes de contrôle de la position
CJ1W-NC113/213/413 CJ1W-NC133/233/433 CS1W-NC113/213/413 CS1W-NC133/233/433 C200HW-NC113/213/413 C500-NC113/211
Contrôleurs programmables SYSMAC avec sortie d’impulsions attachée
SYSMAC CPM2A |
SYSMAC CPM2C |
|
|
PA203 |
|
POWER |
|
|
/ |
SYSMAC CQM1H
Positionneur monoaxe avec sortie d’impulsions
MS |
|
|
|
|
OPEN |
NS |
13F88M- |
No. |
OPEN |
LINE |
|
|
|
||||
M0 |
DRT141 |
LINE |
CW |
||
|
AXIS |
|
|
||
M1 |
|
POSITIONER |
CCW |
|
|
M2 |
|
|
|
|
|
|
|
|
ALARM |
|
|
2 |
3 |
|
|
|
|
|
M2 |
|
|
LS |
|
|
4 |
NA |
|
|
M1 |
|
|
|
LIMIT |
||
9 |
|
|
M0 |
|
|
SOFT |
NG |
||||
87 |
|
×10 |
|
|
|
|
ORG |
SRHALM |
|||
2 |
3 |
|
|
|
|
|
|
|
|
||
|
4 |
|
|
|
|
|
|
ENCODER |
|
||
9 |
|
|
|
|
|
|
|
|
STOP |
|
|
87 |
|
×1 |
|
|
|
|
|
DRIVER |
ALM |
||
1 |
DR0 |
|
|
|
|
|
|
OTHER |
|
||
3 2 ↓ON |
|
|
|
|
|
|
|
|
|
||
|
|
DR1 |
|
|
) |
|
|
|
|
|
|
|
|
L/R |
(R |
ED : |
|
|
COMMUNICATION |
||||
|
|
|
|
|
WITCH |
|
|
SPEED |
|
||
|
|
|
|
DIP S |
|
DR1 |
|
250kbps |
|
||
|
|
|
|
DR0 |
|
O |
FF |
|
|
||
|
|
|
|
|
F |
|
500kbps |
OTE |
|||
|
|
|
|
OFF |
|
OF |
|
|
|
− |
|
|
|
|
|
ON |
|
ON |
LO |
CAL |
/REM |
|
|
|
|
|
|
|
ON |
|
MODE |
||||
|
|
|
|
OFF |
|
|
|
||||
|
|
|
|
ON |
SWITCH |
|
REMOTEMODE |
||||
|
|
|
|
DIP |
L/R |
|
|
LOCAL |
|
||
|
|
|
|
|
OFF |
|
|
|
|
|
|
|
|
|
|
|
ON |
|
|
|
|
|
|
I/O
Positionneur monoaxe 3F88M-DRT141 pour DeviceNet
B.B |
INP TGON REF POWER |
|
VCMP |
R7A–PR02A PARAMETER UNIT
SCROLL MODE/SET
RESET
JOG
DATA
RUN
READ WRITE
DRIVER |
PR |
PR |
DRIVER |
Console de paramétrage (portable) R7A-PR02A
SMARTSTEP A-series R7D-AP@ servomoteur
SMARTSTEP A-series R7M-A@ servomoteur
1-4
Introduction |
Chapitre 1 |
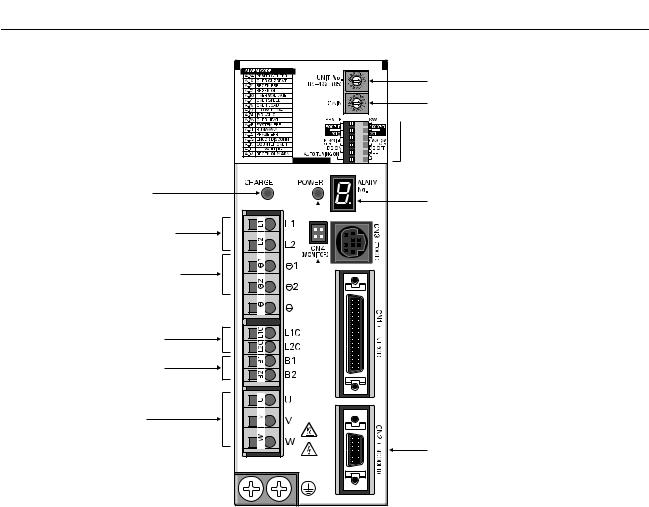
1-3 Nomenclature des servomoteurs
Témoin d'alimentation |
circuit principal |
Terminaux d’entrée |
d'alimentation circuit |
principal |
Terminaux de connexion bobine |
d’induction en c.c. |
Terminaux d’entrée |
d'alimentation de circuit de |
contrôle |
Terminaux de résistance de |
régénération externe |
Terminaux d’alimentation de |
servomoteur |
Terminaux industriels d’alimentation électrique et d’alimentation de  servomoteur
servomoteur
Bouton rotatif de sélection du n° d’unité
Bouton rotatif de réglage du gain

 Sélecteurs de fonction :
Sélecteurs de fonction :
• Interrupteur / Interrupteur de paramétrage
• Résolution
• Entrée d'impulsions de commande
•Frein dynamique
•Interrupteur d’autoréglage en ligne
Voyant d'alarme
 Témoin d'alimentation circuit de contrôle
Témoin d'alimentation circuit de contrôle
 Connecteur de communication (CN3)
Connecteur de communication (CN3)

 Connecteur de sortie surveillance (CN4)
Connecteur de sortie surveillance (CN4)

 Connecteur de contrôle E/S (CN1)
Connecteur de contrôle E/S (CN1)
Connecteur d’entrée d’encodeur (CN2)
1-5

Introduction |
|
Chapitre 1 |
||
|
|
|
|
|
1-4 |
Normes applicables |
|
||
■ Directives communautaires |
|
|||
|
|
|
|
|
Directives |
Produit |
Normes en vigueur |
Remarques |
|
communau- |
|
|
|
|
taires |
|
|
|
|
|
|
|
|
|
Directive |
|
Servomoteurs en c.a. |
EN50178 |
Normes de sécurité des appareils |
relative aux |
|
|
électriques de mesure, de contrôle et |
|
basses |
|
|
|
de recherche |
tensions |
|
|
|
|
|
Servomoteur en c.a. |
IEC60034-1, -5, -8, -9 |
Équipement électrique rotatif |
|
|
|
|||
|
|
|
EN60034-1, -9 |
|
|
|
|
|
|
Directives |
Servomoteurs en c.a. |
EN55011 classe A groupe 1 |
Interférence des appareils sans fil et |
|
relatives à la |
|
|
méthodes de mesure de fréquence |
|
compatibilité |
|
|
radio pour des applications |
|
électromagnéti |
|
|
industrielles, scientifiques et |
|
que (CEM) |
|
|
médicales. |
|
|
|
|
|
|
|
|
|
EN61000-6-2 |
Compatibilité électromagnétique et |
|
|
|
|
normes antiparasitage en |
|
|
|
|
environnement industriel |
Remarque Installation en respectant les normes indiquées sous 3-2-5 CEM compatibilité de câblage obligatoire afin de respecter les directives CEM.
■ Normes UL et cUL
Normes |
Produit |
Normes en vigueur |
Fichier N° |
Remarques |
|
|
|
|
|
UL |
Servomoteurs en |
UL508C |
E179149 |
Transformateurs |
|
c.a. |
|
|
|
|
|
|
|
|
|
Servomoteur en |
UL1004 |
E179189 |
Moteurs électriques |
|
c.a. |
|
|
|
|
|
|
|
|
cUL |
Servomoteurs en |
cUL C22.2 n°14 |
E179149 |
Appareils de surveillance |
|
c.a. |
|
|
industriels |
|
|
|
|
|
|
Servomoteur en |
cUL C22.2 n°100 |
E179189 |
Moteurs et générateurs |
|
c.a. |
|
|
|
|
|
|
|
|
1-6
Introduction |
Chapitre 1 |
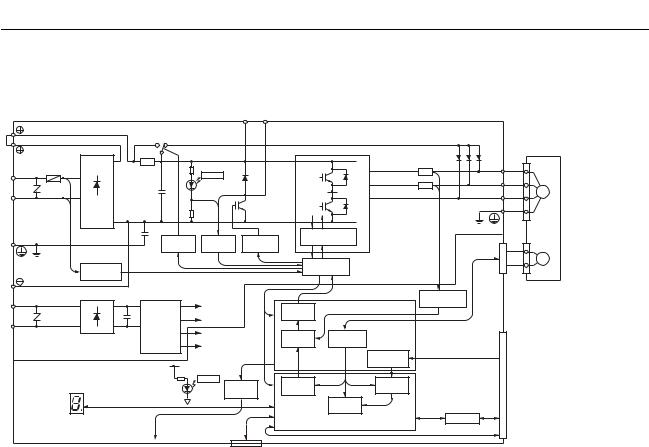
1-5 Schémas du système
■200 V en c.a. : R7D-APA3H/-APA5H/-AP01H/-AP02H/-AP04H 100 V en c.a. : R7D-APA3L/-APA5L/-AP01L/-AP02L/-AP04L
Servomoteurs en c.a. |
|
|
1 |
B1 |
B2 |
2 |
|
Servomoteur en c.a. |
|
Fusible |
P1 |
|
|
|
|
|
P2 |
U |
|
U |
|
|
|
|
|
CHARGE |
|
|
|
|
||||
|
R |
|
|
|
|
|
|
|
V |
|
||
L1 |
|
|
+ |
|
|
|
|
V |
|
|
||
|
|
|
|
|
|
|
|
W |
M |
|||
|
T |
|
|
− |
|
|
|
|
W |
|
||
L2 |
|
|
|
|
(voir remarque) |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
N1 |
|
|
|
|
|
N2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Protection surcharge |
|
|
|
|
|
|
|
|
Drive |
Détection |
|
Commande |
de commande de pilote |
|
CN2 |
|
|
|
|
|
|
|
de pilote de |
|
de porte |
|
|
|||
|
|
|
|
de relais |
de courant |
|
|
|
|
|||
|
|
|
|
|
|
|
porte |
|
|
|
|
|
|
Détection |
|
|
|
|
|
Interface |
|
|
E |
||
|
|
|
|
|
|
|
|
|
||||
|
de courant |
|
|
|
|
|
|
|
|
|
|
|
L1C |
|
|
|
|
|
|
|
|
|
Détection |
|
|
+ |
|
|
± 5 V |
|
|
Génération |
ASIC |
de courant |
|
|
||
|
+ |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||
|
|
− |
− |
Conversion |
+16,5 V |
de PWM |
|
|
|
|
||
|
|
|
|
|
|
|||||||
L2C |
|
c.c/c.a. |
+5 V |
|
|
Amplificateur |
Traitement |
|
CN1 |
|
||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
de courant |
de signal |
|
|
|
|
|
|
|
|
± 15 V |
|
digital |
codeur |
|
|
|
|
|
|
|
|
|
|
|
Traitement |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Entrée |
|
|
|
|
|
|
|
|
|
|
d'impulsion |
|
|
|
|
|
|
|
+5 V |
|
|
|
de commande |
|
|
d'impulsions |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
ALIM. |
Conversion |
Traitement |
Commande |
|
|
de commande |
|
|
|
|
|
|
|
de commande |
|
|
|
|||
|
|
|
|
|
|
|
tension |
de position |
|
|
|
|
|
|
|
|
|
|
|
courant |
|
|
|
||
|
|
|
|
|
0 V |
analogique |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Contrôle |
|
|
|
|
|
|
|
|
|
|
|
|
|
de vitesse |
|
|
|
Zones affichage/configuration |
|
|
|
|
|
Port série |
UC |
E/S |
|
Contrôle E/S |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RS422 |
|
|
|
|
CN4 |
CN3 |
||
Sortie moniteur |
Console de |
||
analogique |
paramétrage/ordinateur |
||
Remarquesur R7D-AP04H/AP04L uniquement
1-7
Introduction |
|
Chapitre 1 |
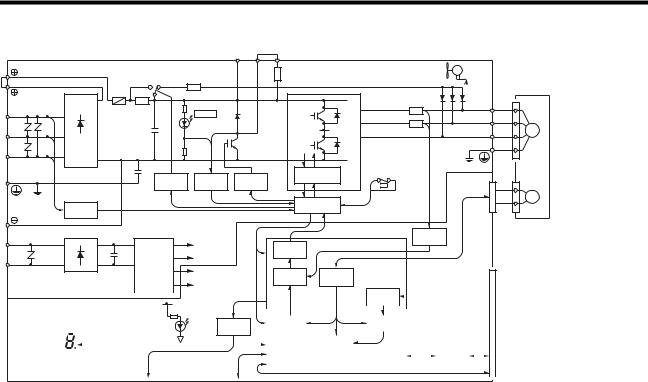
■ 200 V en c.a. : R7D-AP08H |
|
|
Servomoteurs en c.a. |
|
|
1 |
B1 B2 B3 |
VENTILATEUR |
|
|
|
|
|
± 12 V |
2 |
|
Servomoteur en c.a. |
|
|
|
|
|
P |
|
P |
U |
U |
|
|
|
Fusible |
CHARGE |
|
|||
|
R |
|
V |
|
|||
L1 |
|
+ |
|
V |
|
||
|
|
|
W |
M |
|||
|
S |
|
− |
|
W |
||
L2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
L3 |
T |
N |
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
Protection surcharge |
|
Drive |
Détection |
Commande de |
de commande de |
CN2 |
pilote de porte |
||||
de relais |
de courant |
pilote de porte |
|
|
|
|
|
|
|
|
Thermistance |
E |
|
|
Détection |
|
|
|
Interface |
|
|
||
|
de courant |
|
|
|
|
|
|
|
|
L1C |
|
|
|
|
|
|
|
Détection |
|
+ |
|
|
± 5 V |
Génération |
ASIC |
de courant |
|
||
|
+ |
|
|
|
|||||
|
|
|
|
|
|||||
|
|
− |
− |
Conversion |
+16,5 V |
de PWM |
|
|
|
|
|
|
|
|
|||||
|
c.c/c.a. |
|
|
|
CN1 |
||||
L2C |
|
+5 V |
Amplificateur |
Traitement |
|
||||
|
|
|
|
|
|||||
|
|
|
|
|
|
de courant |
de signal |
|
|
|
|
|
|
|
± 15 V |
digital |
codeur |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Traitement |
|
|
|
|
Entrée |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d'impulsions |
|
|
|
|
|
||
|
|
|
|
|
|
+5 V |
|
|
|
|
|
|
|
|
de commande |
|
|
|
|
d'impulsions |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
de commande |
|
|
|
|
|
|
|
|
|
ALIM. |
Conversion |
|
Traitement |
|
|
|
Position |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
tension |
|
de commande |
|
|
|
Contrôle |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
courant |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
0 V |
analogique |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Contrôle |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
de vitesse |
|
|
|
|
|
|
|
|
|
Zones affichage/configuration |
|
|
|
Port série |
|
|
|
UC |
|
E/S |
|
|
|
Contrôle E/S |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RS422 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CN4 |
|
CN3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
Sortie moniteur |
|
Console de |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
analogique |
|
paramétrage/ordinateur |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
1-8
2
Chapitre 2
Modèles et spécifications
2-1 Modèles
2-2 Dimensions de montage extérieur
2-3 Caractéristiques techniques des servomoteurs
2-4 Spécifications du servomoteur
2-5 Spécifications réducteur
2-6 Spécifications connecteur et câble
2-7 Spécifications des borniers d'interface et de câbles 2-8 Spécifications de la console de paramétrage
2-9 Spécifications de résistance de régénération extérieure
2-10 Bobines de réactance c.c.
|
Modèles et spécifications |
Chapitre 2 |
|
|
|
|
|
2-1 Modèles
■ Servomoteurs
● Servomoteurs en cylindre de 3000 tr / mn
Caractéristiques techniques |
Modèle |
||
|
|
|
|
Sans frein |
Arbre droit |
30 W |
R7M-A03030 |
|
sans clavette |
|
|
|
50 W |
R7M-A05030 |
|
|
|
||
|
|
|
|
|
|
100 W |
R7M-A10030 |
|
|
|
|
|
|
200 W |
R7M-A20030 |
|
|
|
|
|
|
400 W |
R7M-A40030 |
|
|
|
|
|
|
750 W |
R7M-A75030 |
|
|
|
|
|
Arbre droit |
30 W |
R7M-A03030-S1 |
|
avec clavette |
|
|
|
50 W |
R7M-A05030-S1 |
|
|
|
||
|
|
|
|
|
|
100 W |
R7M-A10030-S1 |
|
|
|
|
|
|
200 W |
R7M-A20030-S1 |
|
|
|
|
|
|
400 W |
R7M-A40030-S1 |
|
|
|
|
|
|
750 W |
R7M-A75030-S1 |
|
|
|
|
Avec frein |
Arbre droit |
30 W |
R7M-A03030-B |
|
sans clavette |
|
|
|
50 W |
R7M-A05030-B |
|
|
|
||
|
|
|
|
|
|
100 W |
R7M-A10030-B |
|
|
|
|
|
|
200 W |
R7M-A20030-B |
|
|
|
|
|
|
400 W |
R7M-A40030-B |
|
|
|
|
|
|
750 W |
R7M-A75030-B |
|
|
|
|
|
Arbre droit |
30 W |
R7M-A03030-BS1 |
|
avec clavette |
|
|
|
50 W |
R7M-A05030-BS1 |
|
|
|
||
|
|
|
|
|
|
100 W |
R7M-A10030-BS1 |
|
|
|
|
|
|
200 W |
R7M-A20030-BS1 |
|
|
|
|
|
|
400 W |
R7M-A40030-BS1 |
|
|
|
|
|
|
750 W |
R7M-A75030-BS1 |
|
|
|
|
● Servomoteurs plats de 3000 tr / mn
Caractéristiques techniques |
Modèle |
||
|
|
|
|
Sans frein |
Arbre droit |
100 W |
R7M-AP10030 |
|
sans clavette |
|
|
|
200 W |
R7M-AP20030 |
|
|
|
||
|
|
|
|
|
|
400 W |
R7M-AP40030 |
|
|
|
|
|
|
750 W |
R7M-AP75030 |
|
|
|
|
|
Arbre droit |
100 W |
R7M-AP10030-S1 |
|
avec clavette |
|
|
|
200 W |
R7M-AP20030-S1 |
|
|
|
||
|
|
|
|
|
|
400 W |
R7M-AP40030-S1 |
|
|
|
|
|
|
750 W |
R7M-AP75030-S1 |
|
|
|
|
Avec frein |
Arbre droit |
100 W |
R7M-AP10030-B |
|
sans clavette |
|
|
|
200 W |
R7M-AP20030-B |
|
|
|
||
|
|
|
|
|
|
400 W |
R7M-AP40030-B |
|
|
|
|
|
|
750 W |
R7M-AP75030-B |
|
|
|
|
|
Arbre droit |
100 W |
R7M-AP10030-BS1 |
|
avec clavette |
|
|
|
200 W |
R7M-AP20030-BS1 |
|
|
|
||
|
|
|
|
|
|
400 W |
R7M-AP40030-BS1 |
|
|
|
|
|
|
750 W |
R7M-AP75030-BS1 |
|
|
|
|
■ Servomoteurs
Caractéristiques |
Modèle |
|
techniques |
|
|
|
|
|
Monophase |
30 W |
R7D-APA3L |
100 V en c.a. |
|
|
50 W |
R7D-APA3L |
|
|
|
|
|
100 W |
R7D-AP01L |
|
|
|
|
200 W |
R7D-AP02L |
|
|
|
|
400 W |
R7D-AP04L |
|
|
|
Monophase |
30 W |
R7D-APA3H |
200 V en c.a. |
|
|
50 W |
R7D-APA5H |
|
|
|
|
|
100 W |
R7D-AP01H |
|
|
|
|
200 W |
R7D-AP02H |
|
|
|
|
400 W |
R7D-AP04H |
|
|
|
|
750 W |
R7D-AP08H |
|
|
|
2-2
Modèles et spécifications |
Chapitre 2 |
■ Réducteurs (arbre droit avec clavette)
●Pour servomoteurs en cylindre (jeu = 3′ maxi.)
Caractéristiques techniques |
Modèle |
|
Capacité |
Réducteurs |
|
servomoteur |
(rapport de |
|
|
décélération) |
|
50 W |
1/5 |
R7G-VRSFPB05B50 |
|
|
|
|
1/9 |
R7G-VRSFPB09B50 |
|
|
|
|
1/15 |
R7G-VRSFPB15B50 |
|
|
|
|
1/25 |
R7G-VRSFPB25B50 |
|
|
|
100 W |
1/5 |
R7G-VRSFPB05B100 |
|
|
|
|
1/9 |
R7G-VRSFPB09B100 |
|
|
|
|
1/15 |
R7G-VRSFPB15B100 |
|
|
|
|
1/25 |
R7G-VRSFPB25B100 |
|
|
|
200 W |
1/5 |
R7G-VRSFPB05B200 |
|
|
|
|
1/9 |
R7G-VRSFPB09C400 |
|
|
|
|
1/15 |
R7G-VRSFPB15C400 |
|
|
|
|
1/25 |
R7G-VRSFPB25C200 |
|
|
|
400 W |
1/5 |
R7G-VRSFPB05C400 |
|
|
|
|
1/9 |
R7G-VRSFPB09C400 |
|
|
|
|
1/15 |
R7G-VRSFPB15C400 |
|
|
|
|
1/25 |
R7G-VRSFPB25D400 |
|
|
|
750 W |
1/5 |
R7G-VRSFPB05C750 |
|
|
|
|
1/9 |
R7G-VRSFPB09D750 |
|
|
|
|
1/15 |
R7G-VRSFPB15D750 |
|
|
|
|
1/25 |
R7G-VRSFPB25E750 |
Remarque Il n’existe pas de réducteur pour les servomoteurs 30 W.
●Pour servomoteurs plats (jeu = 3′ maxi.)
Caractéristiques techniques |
Modèle |
|
Capacité |
Réducteurs |
|
servomoteur |
(rapport de |
|
|
décélération) |
|
100 W |
1/5 |
R7G-VRSFPB05B100P |
|
|
|
|
1/9 |
R7G-VRSFPB09B100P |
|
|
|
|
1/15 |
R7G-VRSFPB15B100P |
|
|
|
|
1/25 |
R7G-VRSFPB25C100P |
|
|
|
200 W |
1/5 |
R7G-VRSFPB05B100 |
|
|
|
|
1/9 |
R7G-VRSFPB09C400P |
|
|
|
|
1/15 |
R7G-VRSFPB15C400P |
|
|
|
|
1/25 |
R7G-VRSFPB25C200P |
|
|
|
400 W |
1/5 |
R7G-VRSFPB05C400P |
|
|
|
|
1/9 |
R7G-VRSFPB09C400P |
|
|
|
|
1/15 |
R7G-VRSFPB15C400P |
|
|
|
|
1/25 |
R7G-VRSFPB25D400P |
|
|
|
750 W |
1/5 |
R7G-VRSFPB05C750P |
|
|
|
|
1/9 |
R7G-VRSFPB09D750P |
|
|
|
|
1/15 |
R7G-VRSFPB15D750P |
|
|
|
|
1/25 |
R7G-VRSFPB25E750P |
|
|
|
●Pour servomoteurs en cylindre (jeu = 45′ maxi.)
Caractéristiques techniques |
Modèle |
|
Capacité |
Réducteurs (rapport |
|
servomoteur |
de décélération) |
|
50 W |
1/5 |
R7G-RGSF05B50 |
|
|
|
|
1/9 |
R7G-RGSF09B50 |
|
|
|
|
1/15 |
R7G-RGSF15B50 |
|
|
|
|
1/25 |
R7G-RGSF25B50 |
|
|
|
100 W |
1/5 |
R7G-RGSF05B100 |
|
|
|
|
1/9 |
R7G-RGSF09B100 |
|
|
|
|
1/15 |
R7G-RGSF15B100 |
|
|
|
|
1/25 |
R7G-RGSF25B100 |
|
|
|
200 W |
1/5 |
R7G-RGSF05B200 |
|
|
|
|
1/9 |
R7G-RGSF09C400 |
|
|
|
|
1/15 |
R7G-RGSF15C400 |
|
|
|
|
1/25 |
R7G-RGSF25C400 |
|
|
|
400 W |
1/5 |
R7G-RGSF05C400 |
|
|
|
|
1/9 |
R7G-RGSF09C400 |
|
|
|
|
1/15 |
R7G-RGSF15C400 |
|
|
|
|
1/25 |
R7G-RGSF25C400 |
|
|
|
750 W |
1/5 |
R7G-RGSF05C750 |
|
|
|
|
1/9 |
R7G-RGSF09C750 |
|
|
|
|
1/15 |
R7G-RGSF15C750 |
|
|
|
|
1/25 |
R7G-RGSF25C750 |
|
|
|
Remarque Il n’existe pas de réducteur pour les servomoteurs 30 W.
●Pour servomoteurs plats (jeu = 45′ maxi.)
Caractéristiques techniques |
Modèle |
|
|
|
|
Capacité |
Réducteurs |
|
servomoteur |
(rapport de |
|
|
décélération) |
|
100 W |
1/5 |
R7G-RGSF05B100P |
|
|
|
|
1/9 |
R7G-RGSF09B100P |
|
|
|
|
1/15 |
R7G-RGSF15B100P |
|
|
|
|
1/25 |
R7G-RGSF25B100P |
|
|
|
200 W |
1/5 |
R7G-RGSF05B200P |
|
|
|
|
1/9 |
R7G-RGSF09C400P |
|
|
|
|
1/15 |
R7G-RGSF15C400P |
|
|
|
|
1/25 |
R7G-RGSF25C400P |
|
|
|
400 W |
1/5 |
R7G-RGSF05C400P |
|
|
|
|
1/9 |
R7G-RGSF09C400P |
|
|
|
|
1/15 |
R7G-RGSF15C400P |
|
|
|
|
1/25 |
R7G-RGSF25C400P |
|
|
|
750 W |
1/5 |
R7G-RGSF05C750P |
|
|
|
|
1/9 |
R7G-RGSF09C750P |
|
|
|
|
1/15 |
R7G-RGSF15C750P |
|
|
|
|
1/25 |
R7G-RGSF25C750P |
2-3
Modèles et spécifications |
Chapitre 2 |
■ Borniers d’interface pour CN1
Caractéristiques techniques |
|
Modèle |
||
|
|
|
|
|
Bornier |
Pour CS1W-NC113/133 |
|
XW2B-20J6-1B |
|
d’interface |
CJ1W-NC113/133 |
|
|
|
|
C200HW-NC113 |
|
|
|
|
C200H-NC112 |
|
|
|
|
3F88M-DRT141 |
|
|
|
|
(communication non supportée) |
|
||
|
|
|
||
|
Pour CS1W-NC213/233/413/433 |
XW2B-40J6-2B |
||
|
CJ1W-NC213/233/413/433 |
|
||
|
C200HW-NC213/413 |
|
|
|
|
C500-NC113/211 |
|
|
|
|
C200H-NC211 |
|
|
|
|
(communication non supportée) |
|
||
|
|
|
|
|
|
Pour CS1W-HCP22 |
|
XW2B-20J6-3B |
|
|
CQM1H-PLB21 |
|
|
|
|
CQM1-CPU43-V1 |
|
|
|
|
(communication non supportée) |
|
||
|
|
|
||
|
Pour CS1W-NC213/233/413/433 |
XW2B-40J6-4A |
||
|
CJ1W-NC213/233/413/433 |
|
||
|
(communication supportée) |
|
||
|
|
|
|
|
Câble de |
(communication non |
|
1 m |
XW2Z-100J-B5 |
servomoteur |
supportée) |
|
|
|
|
2 m |
XW2Z-200J-B5 |
||
|
|
|
||
|
|
|
|
|
|
Communication |
|
1 m |
XW2Z-100J-B7 |
|
supportée. |
|
|
|
|
|
2 m |
XW2Z-200J-B7 |
|
|
|
|
||
|
|
|
|
|
Câble de |
Pour CQM1H-PLB21, |
|
0,5 m |
XW2Z-050J-A3 |
l’unité de |
CQM1-CPU43-V1 |
|
|
|
|
1 m |
XW2Z-100J-A3 |
||
contrôle |
|
|
||
|
|
|
|
|
de |
Pour C200H-NC112 |
|
0,5 m |
XW2Z-050J-A4 |
positionne |
|
|
1 m |
XW2Z-100J-A4 |
ment |
|
|
||
|
|
|
|
|
Pour C200H-NC211, |
|
0,5 m |
XW2Z-050J-A5 |
|
|
|
|||
|
C500-NC113/211 |
|
|
|
|
|
1 m |
XW2Z-100J-A5 |
|
|
|
|
||
|
|
|
|
|
|
Pour CS1W-NC113, |
|
0,5 m |
XW2Z-050J-A8 |
|
C200HW-NC113 |
|
|
|
|
|
1 m |
XW2Z-100J-A8 |
|
|
|
|
||
|
|
|
|
|
|
Pour CS1W-NC213/ |
|
0,5 m |
XW2Z-050J-A9 |
|
413, C200HW-NC213/ |
|
|
|
|
|
1 m |
XW2Z-100J-A9 |
|
|
413 |
|
||
|
|
|
|
|
|
|
|
|
|
|
Pour CS1W-NC133 |
|
0,5 m |
XW2Z-050J-A12 |
|
|
|
|
|
|
|
|
1 m |
XW2Z-100J-A12 |
|
|
|
|
|
|
Pour CS1W-NC233/433 |
|
0,5 m |
XW2Z-050J-A13 |
|
|
|
|
|
|
|
|
1 m |
XW2Z-100J-A13 |
|
|
|
|
|
|
For CJ1W-NC113 |
|
0,5 m |
XW2Z-050J-A16 |
|
|
|
|
|
|
|
|
1 m |
XW2Z-100J-A16 |
|
|
|
|
|
|
For CJ1W-NC213/413 |
|
0,5 m |
XW2Z-050J-A17 |
|
|
|
|
|
|
|
|
1 m |
XW2Z-100J-A17 |
|
|
|
|
|
|
Pour CJ1W-NC113 |
|
0,5 m |
XW2Z-050J-A20 |
|
|
|
|
|
|
|
|
1 m |
XW2Z-100J-A20 |
|
|
|
|
|
|
Pour CJ1W-NC213/433 |
|
0,5 m |
XW2Z-050J-A21 |
|
|
|
|
|
|
|
|
1 m |
XW2Z-100J-A21 |
|
|
|
|
|
|
Pour CS1W-HCP22 |
|
0,5 m |
XW2Z-050J-A22 |
|
(1 axe) |
|
|
|
|
|
1 m |
XW2Z-100J-A22 |
|
|
|
|
|
|
|
Pour CS1W-HCP22 |
|
0,5 m |
XW2Z-050J-A23 |
|
(2 axes) |
|
|
|
|
|
1 m |
XW2Z-100J-A23 |
|
|
|
|
|
|
|
Pour 3F88M-DRT141 |
|
0,5 m |
XW2Z-050J-A25 |
|
|
|
|
|
|
|
|
1 m |
XW2Z-100J-A25 |
■ Câble de contrôle pour CN1
Caractéristiques techniques |
Modèle |
||
Câble de contrôle général (avec |
1 m |
R88A-CPU001S |
|
connecteur raccordé à une |
|
|
|
2 m |
R88A-CPU002S |
||
extrémité) |
|||
|
|
||
|
|
|
|
Câble bornier de connecteur |
1 m |
R88A-CTU001N |
|
|
2 m |
R88A-CTU002N |
|
|
|
|
|
Borniers connecteur |
|
XW2B-40F5-P |
|
■ Câble de servomoteur
Caractéristiques techniques |
Modèle |
||
Pour servomoteurs sans |
3 m |
R7A-CEA003S |
|
frein (les deux types, plat |
|
|
|
5 m |
R7A-CEA005S |
||
et en cylindre) |
|||
|
|
||
10 m |
R7A-CEA010S |
||
|
|||
|
|
|
|
|
15 m |
R7A-CEA015S |
|
|
20 m |
R7A-CEA020S |
|
|
|
|
|
Pour servomoteurs avec |
3 m |
R7A-CEA003B |
|
frein (les deux types, plat |
|
|
|
5 m |
R7A-CEA005B |
||
et en cylindre) |
|||
10 m |
R7A-CEA010B |
||
|
|||
|
|
|
|
|
15 m |
R7A-CEA015B |
|
|
|
|
|
|
20 m |
R7A-CEA020B |
|
■Connecteurs de câble périphérique
Caractéristiques techniques |
|
Modèle |
||
Câble de moniteur analogue (CN4) |
1 m |
R88A-CMW001S |
||
Câble de moniteur d’ordinateur |
DOS |
2 m |
R7A-CCA002P2 |
|
(CN3) |
|
|
|
|
PC98 |
2 m |
R7A-CCA002P3 |
||
|
||||
Connecteur de contrôle E/S (CN1) |
|
R88A-CNU01C |
||
|
|
|
|
|
Connecteur encodeur (CN2) |
|
|
R7A-CNA01R |
|
|
|
|
||
Connecteur d’encodeur (extrémité du |
|
R7A-CNA02R |
||
servomoteur) |
|
|
|
|
■ Consoles de paramétrage
Caractéristiques techniques |
Modèle |
portable (avec câble de 1 m) |
R7A-PR02A |
■ Résistances de régénération extérieure
Caractéristiques techniques |
Modèle |
|
Résistance |
220 W 47 Ω |
R88A-RR22047S |
■ Bobine de réactance c.c.
Caractéristiques techniques |
Modèle |
Pour R7D-APA3L/APA5L/APA01L |
R88A-PX5063 |
Pour R7D-AP02L |
R88A-PX5062 |
Pour R7D-AP04L |
R88A-PX5061 |
|
|
Pour R7D-APA3H/APA5H/AP01H |
R88A-PX5071 |
|
|
Pour R7D-AP02H |
R88A-PX5070 |
Pour R7D-AP04H |
R88A-PX5069 |
|
|
Pour R7D-AP08H |
R88A-PX5061 |
■ Fixations du panneau avant
Caractéristiques techniques |
Modèle |
Pour les SMARTSTEP A Series |
R88A-TK01W |
2-4
Modèles et spécifications |
Chapitre 2 |
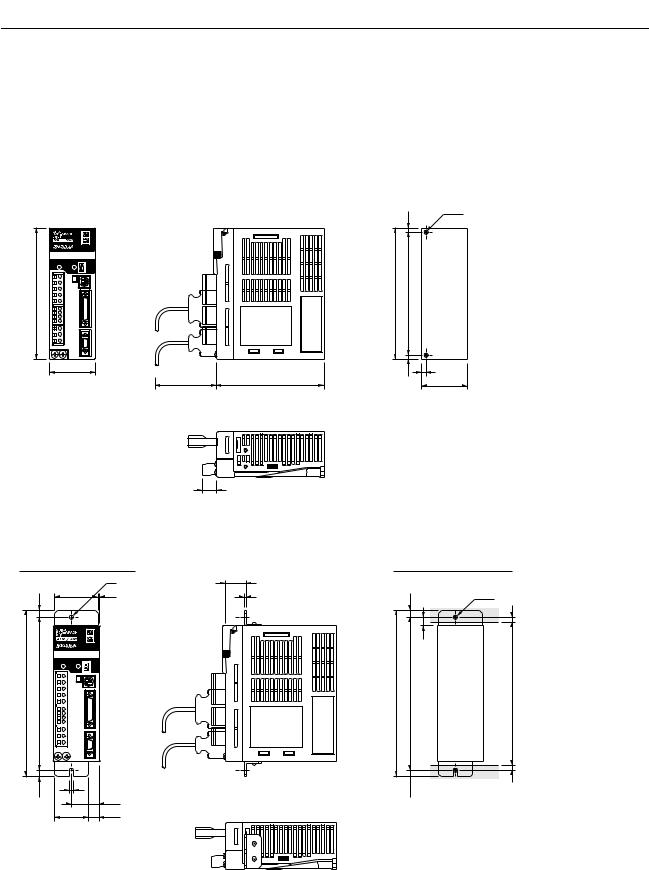
2-2 Dimensions de montage extérieur
2-2-1 Servomoteurs
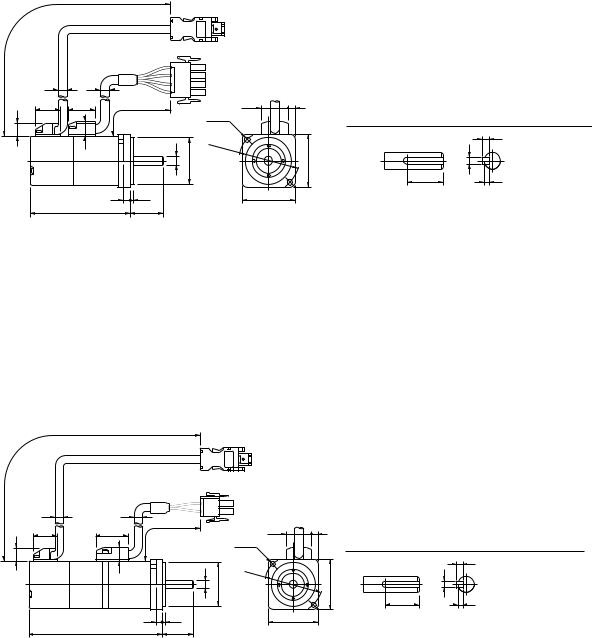
■Monophase 100 V en c.a. R7D-APA3L/-APA5L/-AP01L/-AP02L (30 à 200 W) monophase 200 V en c.a. : R7D-APA3H/-APA5H/-AP01H/-AP02H (30 à 200 W)
● Montage mural
Dimensions extérieures |
|
Dimensions de montage |
5,5
160 |
160 |
149,5 ± 0,5 |
Deux, M4
55
(5)
(75)130
5
55
17
● Montage du panneau avant (en utilisant les fixations de montage)
Dimensions extérieures
|
|
5 de dia. |
7,5 |
52 |
1,5 |
|
|
195 |
180 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(7,5) |
5 |
|
|
|
32,5 |
42 |
11,5 |
24,5
2
Dimensions de montage
|
7,5 |
Deux, M4 |
|
6 |
|
|
|
|
|
|
10 |
195 |
180 ± 0,5 |
(168) |
(7,5)  6
6
2-5
Modèles et spécifications |
Chapitre 2 |
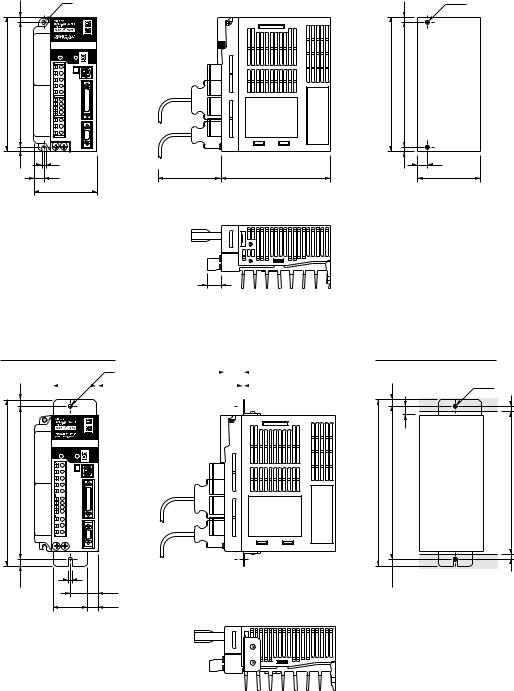
■Monophase 100 V en c.a. R7D-AP04L (400 W) monophase 200 V en c.a. : R7D-AP04H (400 W)
● Montage mural
Dimensions extérieures |
|
Dimensions de montage |
|
5,5 |
|
5 de dia. |
|
5,5 |
|
|
|
|
||
160 |
149,5 |
|
|
160 |
149,5 ± 0,5 |
|
(5) |
5 |
|
|
(5) |
|
12 |
(75) |
130 |
||
|
|
|
|||
|
|
|
75 |
|
|
Deux, M4
12
75
17
● Montage du panneau avant (en utilisant les fixations de montage)
Dimensions extérieures
|
|
|
|
|
|
|
|
|
5 de dia. |
24,5 |
|
|
|||
7,5 |
|
|
52 |
|
|
|
|
1,5 |
|
2 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
195 |
180 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(7,5) |
5 |
|
|
|
32,5 |
42 |
11,5 |
Dimensions de montage
|
7,5 |
Deux, M4 |
|
6 |
|
|
|
|
|
|
10 |
195 |
180 ± 0,5 |
(168) |
(7,5)  6
6
2-6
Modèles et spécifications |
Chapitre 2 |
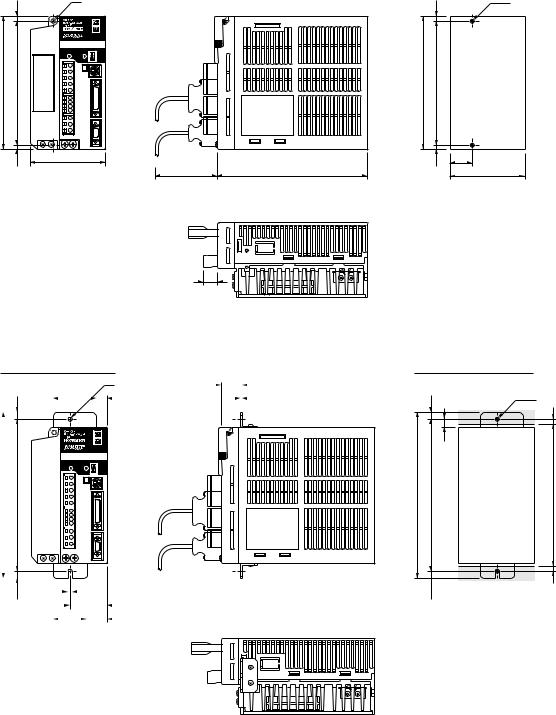
■ Monophase / Triphase 200 V en c.a. : R7D-AP08H (750 W)
● Montage mural
Dimensions extérieures |
Dimensions de montage |
|
|
|
|
|
5,5 |
5 de dia. |
5,5 |
|
|
||
160 |
149,5 |
160 |
149,5 ± 0,5 |
|
(5) |
90 |
(5) |
|
|
(75) |
180 |
Deux, M4
27
90
17
● Montage du panneau avant (en utilisant les fixations de montage)
Dimensions extérieures
|
|
5 de dia. |
24,5 |
|
|
||
7,5 |
52 |
12,5 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
195 |
180 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(7,5) |
|
|
|
|
5 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
43,5 |
|
|
|
|
|
|
||
|
42 |
|
|
22,5 |
|||
|
|
|
|
|
|
|
|
Dimensions de montage
|
7,5 |
Deux, M4 |
|
6 |
|
|
|
|
|
|
10 |
195 |
180 ± 0,5 |
(168) |
(7,5)  6
6
2-7
Modèles et spécifications |
Chapitre 2 |
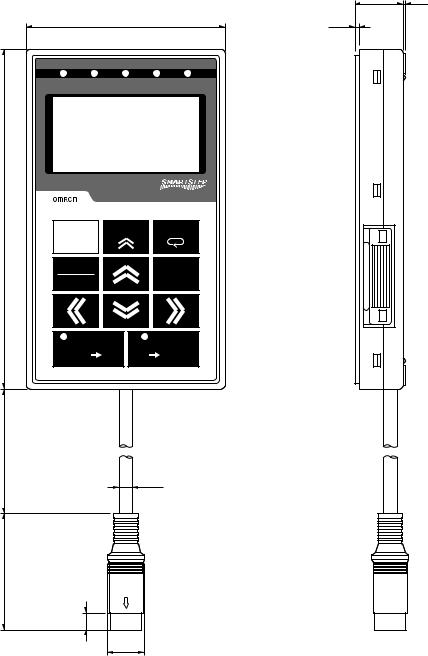
2-2-2 Console de paramétrage
■ Console de paramétrage portable R7A-PR02A
17 0,8
70 |
1,5 |
120
1000
42
B.B |
INP |
TGON REF ALIM. |
|
VCMP |
|
R7A–PR02A CONSOLE DE PARAMÉTRAGE
SCROLL MODE/SET
RESET
JOG
DATA
RUN
READ WRITE
DRIVER |
PR |
PR |
DRIVER |
4,8 de dia.
6
13,2 de dia.
2-8
Modèles et spécifications |
Chapitre 2 |
2-2-3 Servomoteurs
■ Servomoteur en cylindre sans frein
● 30 W/50 W/100 W R7M-A03030(-S1)/-A05030(-S1)/-A10030(-S1)
300 ± 30
6 de dia. |
7 de dia. |
19,5 |
20 |
300 ± 30 |
21,5 |
5 |
9,5 |
|
|
Deux, 4,3 de dia. |
|
11 |
Dia. S |
|
46 |
de |
30h7 dia. |
|
dia. |
||
|
40 |
|||
5 |
2,5 |
|
|
40 |
LL |
25 |
|
|
|
Dimensions de l'extrémité d'arbre avec clavette (S1)
|
h |
|
b |
14 |
t1 |
Modèle |
|
|
Dimensions (mm) |
|
|
|
|
|
|
|
|
|
LL |
S |
b |
h |
t1 |
|
|
|
|
|
|
R7M-A03030-@ |
69.5 |
6h6 |
2 |
2 |
1.2 |
|
|
|
|
|
|
R7M-A05030-@ |
77 |
6h6 |
2 |
2 |
1.2 |
|
|
|
|
|
|
R7M-A10030-@ |
94.5 |
8h6 |
3 |
3 |
1.8 |
■ Servomoteurs en cylindre avec frein
● 30 W/50 W/100 W R7M-A03030-B(S1)/-A05030-B(S1)/-A10030-B(S1)
300 ± 30
6 de dia. |
7 de dia. |
19,5 |
27 |
300 ± 30 |
|
|
|
21,5 |
5 |
|
|
|
|
|
|
||||
9,5 |
|
|
|
Deux, 4,3 de dia. |
Dimensions de l'extrémité d'arbre avec clavette (BS1) |
|||
|
|
Dia.S |
|
46 |
|
|
|
h |
|
11 |
dia.30h7 |
de |
dia. |
|
b |
||
|
|
40 |
||||||
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
14 |
t1 |
|
5 |
2,5 |
|
|
|
|
40 |
|
|
LL |
25 |
|
|
|
|
|
|
Modèle |
|
|
Dimensions (mm) |
|
|
|
|
|
|
|
|
|
LL |
S |
b |
h |
t1 |
|
|
|
|
|
|
R7M-A03030-B@ |
101 |
6h6 |
2 |
2 |
1.2 |
R7M-A05030-B@ |
108.5 |
6h6 |
2 |
2 |
1.2 |
R7M-A10030-B@ |
135 |
8h6 |
3 |
3 |
1.8 |
2-9
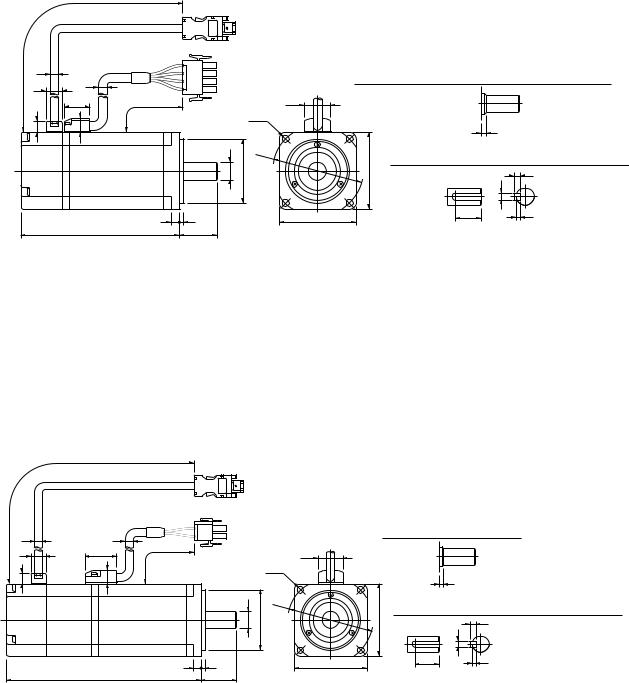
Modèles et spécifications |
Chapitre 2 |
■ Servomoteur en cylindre sans frein
● 200 W/400 W/750 W R7M-A20030(-S1)/-A40030(-S1)/-A75030(-S1)
300 ± 30
6 de dia. |
|
|
|
|
|
|
|
Dimensions de section de sortie de servomoteur 750-W |
|
13 |
7 de dia. |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
20 |
300 ± 30 |
|
|
|
21,5 |
|
|
|
9 |
|
|
|
|
Quatre, dia. Z |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
2 |
|
11 |
|
S |
|
Dia. |
|
|
|
|
|
|
|
Dia. |
D2 |
D1 |
|
Dimensions de l'extrémité d'arbre avec clavette (S1) |
||
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||
|
|
|
|
Dia. |
|
|
|
C |
5 |
|
|
|
|
|
|
|
5 |
||
|
|
G |
3 |
|
|
|
C |
QK |
3 |
|
|
|
|
|
|
|
|||
|
|
LL |
LR |
|
|
|
|
|
|
Modèle |
|
|
|
|
|
Dimensions (mm) |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
LL |
LR |
|
C |
|
P1 |
P2 |
G |
Z |
S |
QK |
|
|
|
|
|
|
|
|
|
|
|
|
R7M-A20030-@ |
96.5 |
30 |
60 |
|
70 |
|
50h7 |
6 |
5,5 |
14h6 |
20 |
R7M-A40030-@ |
124,5 |
30 |
60 |
|
70 |
|
50h7 |
6 |
5,5 |
14h6 |
20 |
R7M-A75030-@ |
145 |
40 |
80 |
|
90 |
|
70h7 |
8 |
7 |
16h6 |
30 |
■ Servomoteurs en cylindre avec frein
● 200 W/400 W/750 W R7M-A20030-B(S1)/-A40030-B(S1)/-A75030-B(S1)
300 ± 30
6 de dia. |
7 de dia. |
Dimensions de section de sortie de servomoteur 750-W
13 |
300 ± 30 |
|
|
21,5 |
27 |
|
|
||
9 |
|
|
Quatre, dia. Z |
|
|
|
|
||
|
11 |
S |
Dia. |
|
|
|
Dia. |
D1 |
|
|
|
Dia. D2 |
|
|
|
|
|
C |
|
|
G |
3 |
|
C |
|
LL |
LR |
|
|
2
Dimensions de l'extrémité d'arbre avec clavette (BS1)
|
5 |
|
5 |
QK |
3 |
Modèle |
|
|
|
|
|
Dimensions (mm) |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
LL |
LR |
|
C |
|
P1 |
D2 |
G |
Z |
S |
QK |
|
|
|
|
|
|
|
|
|
|
|
|
R7M-A20030-B@ |
136 |
30 |
60 |
|
70 |
|
50h7 |
6 |
5,5 |
14h6 |
20 |
R7M-A40030-B@ |
164 |
30 |
60 |
|
70 |
|
50h7 |
6 |
5.5 |
14h6 |
20 |
R7M-A75030-B@ |
189,5 |
40 |
80 |
|
90 |
|
70h7 |
8 |
7 |
16h6 |
30 |
2-10
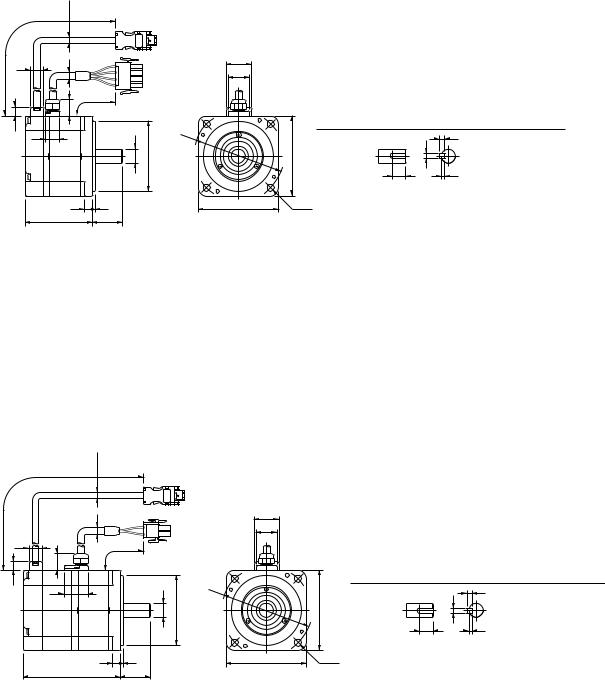
Modèles et spécifications |
Chapitre 2 |
■ Servomoteur plat sans frein
● 100 W/200 W/400 W/750 W R7M-AP10030(-S1)/-AP20030(-S1)/-AP40030(-S1)/AP75030(-S1)
|
6 de dia. |
300 ± 30 |
13 |
7 de dia. |
|
|
|
300 ± 30 |
|
A2 |
|
A1 |
A5 |
|
|
|
|
F |
LL |
G |
LR |
Dia. S
A3 |
A4 |
Dimensions de l'extrémité d'arbre avec clavette (S1)
Dia. |
|
h |
D1 |
|
|
Dia.D2 |
|
b |
C |
t1 |
|
|
QK |
C |
Quatre, dia. Z |
Modèle |
|
|
|
|
|
|
|
|
Dimensions (mm) |
|
|
|
|
|
|
|
|
||||
|
|
Dimensions du servomoteur de base |
|
Avec clavette |
|
Dimensions sortie |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
(dimensions de |
|
|
|
câbles |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
l’extrémité d’arbre) |
|
|
|
|
|
|
|||
|
LL |
|
LR |
C |
D1 |
D2 |
F |
G |
Z |
|
S |
QK |
b |
h |
t1 |
A1 |
|
A2 |
A3 |
A4 |
A5 |
R7M-AP10030-@ |
62 |
|
25 |
60 |
70 |
50h7 |
3 |
6 |
5.5 |
|
8h6 |
14 |
3 |
3 |
1.8 |
9 |
|
18 |
25 |
21 |
14 |
R7M-AP20030-@ |
67 |
|
30 |
80 |
90 |
70h7 |
3 |
8 |
7 |
|
14h6 |
16 |
5 |
5 |
3 |
|
|
|
|
|
|
R7M-AP40030-@ |
87 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R7M-AP75030-@ |
86.5 |
|
40 |
120 |
145 |
110h7 |
3.5 |
10 |
10 |
|
16h6 |
22 |
5 |
5 |
3 |
|
|
28 |
|
38 |
19 |
■ Servomoteur plat avec frein
● 100 W/200 W/400 W/750 W R7M-AP10030-B(S1)/-AP20030-B(S1)/-AP40030-B(S1)/AP75030-B(S1)
6 de dia. |
300 ± 30 |
7 de dia. |
|
13 |
300 ± 30 |
|
|
A2 |
|
A1 |
|
A5 |
|
G |
F |
LL |
LR |
Dia. S
A3 |
A4 |
Dia. |
Dimensions de l'extrémité d'arbre avec clavette (BS1) |
|
|
h |
|
D1 |
|
|
Dia.D2 |
|
b |
C |
t1 |
|
|
QK |
|
C |
Quatre, dia. Z |
Modèle |
|
|
|
|
|
|
|
|
Dimensions (mm) |
|
|
|
|
|
|
|
|
|||
|
|
Dimensions du servomoteur de base |
|
Avec clavette |
|
Dimensions sortie |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
(dimensions de |
|
|
|
câbles |
|
||||
|
|
|
|
|
|
|
|
|
|
|
l’extrémité d’arbre) |
|
|
|
|
|
|
|||
|
LL |
|
LR |
C |
D1 |
D2 |
F |
G |
Z |
S |
QK |
b |
h |
t1 |
A1 |
|
A2 |
A3 |
A4 |
A5 |
R7M-AP10030-B@ |
91 |
|
25 |
60 |
70 |
50h7 |
3 |
6 |
5.5 |
8h6 |
14 |
3 |
3 |
1.8 |
9 |
|
18 |
25 |
21 |
23 |
R7M-AP20030-B@ |
98,5 |
|
30 |
80 |
90 |
70h7 |
3 |
8 |
7 |
14h6 |
16 |
5 |
5 |
3 |
|
|
|
|
|
|
R7M-AP40030-B@ |
118,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R7M-AP75030-B@ |
120 |
|
40 |
120 |
145 |
110h7 |
3,5 |
10 |
10 |
16h6 |
22 |
5 |
5 |
3 |
|
|
28 |
|
38 |
26 |
2-11
Loading...