


DEH-40396B
GE Industrial Systems
SOLID-STATE SOFT STARTER
ASTAT®-IBP Plus
USER MANUAL
REMARKS:
1.Read this manual thoroughly before using the ASTAT-IBP Plus and store in a safe place for reference.
2.Make sure that this manual is delivered to the end user.
3.The policy of GE Industrial Systems is one of continuous improvement.
The right is reserved to alter the design on any structural details of the products at any time without giving notice.
ASTAT®-IBP Plus Soft Starters
WARNINGS
1.Disconnect power before installing or servicing.
2.Hazardous voltages are present in the motor circuit even when the starter is OFF. An isolation contactor, configured to provide automatic isolation when the motor is turned OFF is recommended.
3.Unit may contain more than one live circuit. Disconnect both control and main circuits before installing or servicing.
4.Soft stop should not be used as an Emergency stop.
5.Stopping mode must be set to meet applicable standards for operator safety.
6.Separate motor overcurrent protection is required to be provided in accordance with the Canadian Electrical Code, Part 1. ASTAT-IBP Plus provides separate motor protection.
CAUTIONS
1.Semi-conductor fuses specified may not provide branch circuit protection. Refer to local applicable electrical codes.
2.Overload relay setting should be properly coordinated with motor.
3.Abnormal starting times in excess of 30 seconds or closely repeated operations of acceleration ramp/deceleration ramp may cause motor damage. Contact motor manufacturer to ensure proper motor selection has been made for these conditions.
4.If control power is lost between starts, the overload relay protection is reset to cold start conditions.
ASTAT®-IBP Plus Soft Starters
PRECAUTIONS
1.Debranchez l'alimentation en courant électrique avant de raccorder ou d'intervenir.
2.Des tensions dangereuses sort présente dans le circuit moteur même si le soft starter indique la position "arrêt". Un contacteur d'isolement assurant un isolement automatique quand le moteur est arrête, est recommendé.
3.L'appareil peut renfermer plus d'un circuit sous tension de'brancher les circuits principaux et les circuits de controle avant de raccorder ou d'intervenir.
4.Délestage "soft stop" ne devrait jamais être utilisé en lieu de délestage d'urgence.
5.Procédés de délestage doivent être conforme aux normes de sécurité des utilisateurs.
AVERTISSEMENTS
1.Les fusibles semi-conducteurs specifies ne protégent pas obligatoirement les circuits se conformer aux codes locaux d'installations électriques.
2.Le relais de courant de surcharge doit être proprement coordonné avec la marche du moteur.
3.Les délais anormaux de mise en service d'une durée supérieure à 30 secondes, ainsi que les montées/descentes en regime, sont suseptibles d'edommager le moteur. Mettez-vous en rapport avec votre fabricant en ce qui concerne le choix du moteur adéquat.
4.En cas d'interruption de l'alimentation entre deux dèmarrages, la protection assurée par démarrage à froid.
5.Le moteur doit être muni d'une protection distincte contre les surintensites, et la surchauffe conformement au code de l'electricite, premiere partie. ASTAT Plus le relais de courant de surcharge doit être proprement coordonne avec la marche du moteur.

INDEX
|
|
Page |
Section 1. Overview ......................................................................................................... |
1-1 |
|
1-1 |
Applications ....................................................................................................................... |
1-1 |
1-2 |
Features and benefits ........................................................................................................ |
1-2 |
Section 2. |
Types and Ratings ............................................................................................. |
2-1 |
2-1 |
Ratings ............................................................................................................................... |
2-1 |
2-2 |
Thermal characteristics ...................................................................................................... |
2-2 |
Section 3. |
Technical Specifications...................................................................................... |
3-1 |
3-1 |
General specifications ....................................................................................................... |
3-1 |
3-2 I/O Terminal board specifications ....................................................................................... |
3-2 |
|
3-3 |
I/O wiring ............................................................................................................................ |
3-3 |
3-4 |
Operating modes ............................................................................................................... |
3-4 |
3-5 Programmable inputs and outputs ..................................................................................... |
3-5 |
|
Section 4. Programming ................................................................................................... |
4-1 |
|
4-1 Keypad and display description ......................................................................................... |
4-1 |
|
4-2 |
Parameter block configuration ........................................................................................... |
4-2 |
4-3 |
Monitor block parameters .................................................................................................. |
4-4 |
4-4 |
Calibration block parameters ............................................................................................. |
4-5 |
4-5 |
Basic block parameters ..................................................................................................... |
4-6 |
4-6 |
Advanced block parameters .............................................................................................. |
4-7 |
4-7 Application and basic settings ........................................................................................... |
4-8 |
|
4-8 Saving parameters to E2PROM ........................................................................................ |
4-9 |
|
4-9 |
Lockout .............................................................................................................................. |
4-10 |
Section 5. |
Installation ..................................................................................................... |
5-1 |
5-1 |
Equipment installation ........................................................................................................ |
5-1 |
5-2 |
General .............................................................................................................................. |
5-1 |
5-3 |
Branch circuit protection .................................................................................................... |
5-2 |
5-4 |
Start-up .............................................................................................................................. |
5-3 |
5-5 |
Troubleshooting ................................................................................................................. |
5-3 |
5-6 |
Thyristor check .................................................................................................................. |
5-4 |
Section 6. |
Appendix ........................................................................................................ |
6-1 |
6-1 |
Application diagrams ......................................................................................................... |
6-1 |
6-2 |
Serial communications ....................................................................................................... |
6-2 |
6-3 |
Dimensions ........................................................................................................................ |
6-6 |
i i

1. Overview
1-1. Applications
There are numerous applications where soft starting and limited current peaks are needed for the starting of squirrel cage induction motors. Traditionally, reduced voltage starting was accomplished using electromechanical starters, such as star delta starters, autotransformer starters, stator resistance starters or by using part-winding motors. These methods would provide a two-, threeor four-step torque change by switching the motor voltage from reduced value to full voltage (in steps) after a preset time interval.
ASTAT-IBP Plus Solid State Reduced-Voltage Starters (also known as soft starters) use solid state devices to gradually increase the voltage from an initial preset level (initial torque) to full voltage over a selected time period. The same solid state devices may also be used to reduce the voltage for the deceleration of the motor should this be required in the application. This starting and stopping method provides smooth, stepless acceleration and deceleration of AC squirrel-cage induction motors. The ASTAT-IBP Plus control circuitry offers many additional functions, such as the monitoring, protection and secondary functions listed.
Integral Bypass
The ASTAT-IBP Plus provides acceleration and deceleration control using back-to-back SCRs. When the motor reaches the end of the ramp, a bypass contactor is energized and the SCRs are switched off. This allows the ASTAT-IBP Plus to run cooler than conventional soft starters.
Versatile Use
ASTAT-IBP Plus Solid State Reduced-Voltage Starters offer customer-configurable functions, including pedestal voltage, kick start (selectable), acceleration ramp, starting current limit, and soft stop (selectable). Typical applications include the following:
• Belted Equipment |
• Centrifugal Fans |
• Centrifuges |
• Compressors |
• Conveyors |
• Crushers |
• Extruders |
• Fans and Blowers |
• Mixers |
• Packaging Equipment |
• Pumps |
• Textile Machinery |
Advanced Features
The ASTAT-IBP Plus incorporates many additional advanced features to ensure suitability for most applications.
Monitoring
•Motor Current
•Line Voltage (1)
•Line Power Factor
•Elapsed Time
•Fault History
Protection
•Password
•Lockout
•Undervoltage (1)
•Overvoltage (1)
•Undercurrent
•Overcurrent
•Long Start Time
•Stalled Rotor
Secondary Functions
•Secondary Ramp Up
•Secondary Ramp Down
•Tachometer Feedback
•Dual Motor Switch
The ASTAT-IBP Plus also features two programmable inputs, two programmable output relays and serial communications control.
Note: (1) Monitors L1
1-1

1. Overview
1-2. Features and benefits
An increase in productivity and reliability with the use of static soft starters.
Starting and stopping the motor without steps or transitions lengthens the life of power-driven machines’ mechanical parts and reduces stress on transmission belts and coupling parts. Consequently, maintenance time is reduced and machine/facility lifespans are lengthened.
Improvement in acceleration / deceleration characteristics
Starting with the voltage ramp or, alternatively, by starting current limitation, the acceleration and deceleration ramp more closely fits load characteristics. A kick start may also be selected in instances of high static friction load.
Protected motor
The ASTAT-IBP Plus protects the motor from overloads as well as from incorrect operating conditions, such as loss of an input or output phase, stalled rotor, thyristor short circuit, etc.
Digital technology
The control system is based on the use of a highly specialized microcontroller that treats the signals digitally, thereby avoiding deratings and adjustments common to analog circuits. This type of control ensures excellent precision and speed of execution. The control board is designed using surface mounted devices (SMD) to increases equipment reliability.
High level of immunity
The control signals are optoelectronically isolated. Various levels of protection have been set up in the circuits to immunize the equipment against external disturbance and their harmful effects.
Easy to run and adjust
The ASTAT-IBP Plus can be used for a wide range of applications. A keypad and a digital display make it easy to select options that allow the equipment capabilities to be customized to application needs.
Easy maintenance due to full monitoring
Advanced microprocessor technology allows starters to identify 20 different types of fault conditions. The last four errors are retained in memory to facilitate trouble-shooting and to minimize downtime.
Pump control
The ASTAT-IBP Plus includes a Pump Control function that is more effective in fluid systems than standard soft starting and stopping. The control reduces fluid surges and hammering in a pipe line system. This method controls the motor speed by monitoring the motor parameters with voltage control in a closed-loop system.
Advanced functions
ASTAT-IBP Plus includes advanced functions, such as linear acceleration ramp, programmable I/O and connection to a computer by serial communication (RS 232).
1-2

2. Types and Ratings
2-1. Ratings (1)
Ratings for Standard Duty Applications (300% Current for 30 sec) for low inertia loads such as centrifugal pumps.
|
Catalog |
|
|
Frame |
|
|
|
Maximum Horsepower |
|
|
|
kW |
|
|
||
|
Number |
|
|
Rating, A |
|
|
200 V |
230 V |
460 V |
575 V |
220 V |
380 V/ |
440 V |
480 V/ |
|
|
|
|
|
|
|
|
|
|
415 V |
500 V |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
QI3KDP |
|
|
55 |
|
15 |
20 |
40 |
50 |
17 |
30 |
37 |
40 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
QI3LDP |
|
|
68 |
|
20 |
25 |
50 |
60 |
20 |
37 |
40 |
45 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
QI3YDP |
|
|
80 |
|
25 |
25 |
60 |
75 |
22 |
37 |
45 |
50 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
QI3MDP |
|
|
105 |
|
30 |
40 |
75 |
75 |
30 |
55 |
63 |
75 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
QI3ZDP |
|
|
130 |
|
40 |
50 |
100 |
125 |
37 |
63 |
75 |
80 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
QI3NDP |
|
|
156 |
|
50 |
60 |
125 |
150 |
40 |
75 |
80 |
90 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
QI3PDP |
|
|
192 |
|
60 |
75 |
150 |
200 |
55 |
90 |
100 |
110 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
QI3QDP |
|
|
248 |
|
75 |
100 |
200 |
250 |
63 |
110 |
132 |
147 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
QI3RDP |
|
|
302 |
|
100 |
100 |
250 |
300 |
90 |
160 |
185 |
220 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
QI3SDP |
|
|
361 |
|
125 |
150 |
300 |
350 |
110 |
200 |
220 |
250 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ratings for Heavy Duty Applications (450% Current for 30 sec) for medium loads such as belted conveyors.
|
Catalog |
|
|
Frame |
|
|
|
Maximum Horsepower |
|
|
|
kW |
|
|
||
|
Number |
|
|
Rating, A |
|
|
200 V |
230 V |
460 V |
575 V |
220 V |
380 V/ |
440 V |
480 V/ |
|
|
|
|
|
|
|
|
|
|
415 V |
500 V |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
QI3KDP,LP,YP |
|
|
55 |
|
15 |
20 |
40 |
50 |
17 |
30 |
37 |
40 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
QI3MDP |
|
|
105 |
|
30 |
30 |
75 |
75 |
22 |
50 |
63 |
63 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
QI3ZDP |
|
|
130 |
|
40 |
50 |
100 |
125 |
37 |
63 |
75 |
80 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
QI3NDP |
|
|
156 |
|
50 |
60 |
125 |
150 |
40 |
75 |
80 |
90 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
QI3PDP,QP,RP |
|
|
192 |
|
60 |
75 |
150 |
200 |
50 |
90 |
100 |
110 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
QI3SDP |
|
|
361 |
|
75 |
100 |
200 |
250 |
63 |
110 |
132 |
132 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Notes: (1) = Ratings in Amps given for ambient temperature of up to 40°C and 1000m altitude. Temperatures inside the enclosure must be kept within a 0°-45°C range. Derate output current by 1.5% per degree C above 40°C. Derate output current by 1% per 100m above 1000m.
2-1
2. Types and Ratings
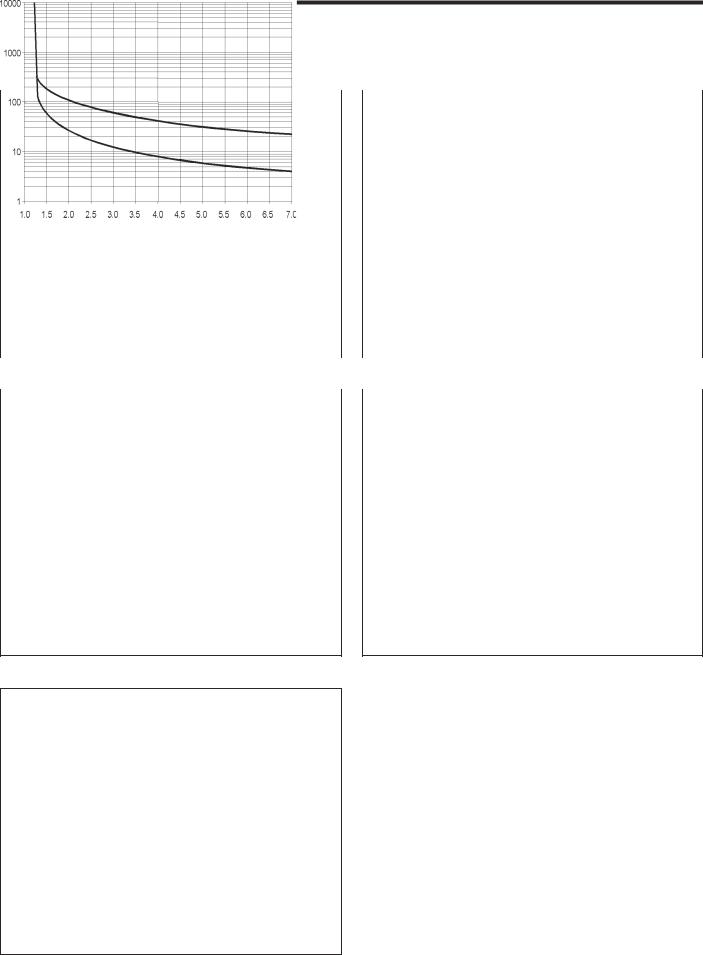
2-2. ASTAT®-IBP Plus, Thermal characteristics
The ASTAT-IBP Plus allows the user to select motor protection according IEC Class 10, 20 and NEMA 10, 20 or 30, selectable by "o" -overload- parameter
IEC Class 10 |
|
IEC Class 20 |
Sec. |
|
Sec. |
|
|
|
|
|
|
|
|
COLD |
|
|
|
|
|
COLD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
HOT |
|||
|
HOT |
|
|
|
||||||
|
|
|
|
|
Multiples of motor FLA Rating In |
|||||
Multiples of motor FLA Rating In |
|
|||||||||
|
|
|
||||||||
NEMA 10 |
|
NEMA 20 |
||||||||
|
|
|
||||||||
Sec. |
|
Sec. |
||||||||
COLD
COLD
HOT
HOT
Multiples of motor FLA Rating In |
Multiples of motor FLA Rating In |
NEMA 30
Sec.
Thermal memory:
If the control voltage is not removed, the unit has a cool down characteristic. The time for cool down is 300 sec. after the overload trip.
If the control voltage is removed after tripping, you must wait at least 5 minutes before the unit can be restarted. See Section 4-10 for restart limitations.
COLD
HOT
Multiples of motor FLA Rating In
2-2

3. Technical Specifications
3-1. ASTAT®-IBP Plus, General specifications
Voltage Ratings |
3ph AC Systems |
|
Up to 600V, +10%, -15% for QI3xDP ASTAT-IBP |
|
|
Abbreviations |
|
|
||||
|
|
|
Plus series |
|
|
|
I |
Actual measured motor current |
|
|||
|
|
|
|
|
|
|
|
|
|
|||
Freq. Range |
50/60 |
Hz |
Control range of 45-65 Hz |
|
|
Im |
Maximum starting current desired |
|
||||
|
|
|
|
|
|
|
|
|
In |
Nominal motor nameplate FLA |
|
|
Control |
Control system |
|
Digital system with microcontroller |
|
|
|||||||
|
|
Ir |
ASTAT rated nameplate FLA |
|
|
|||||||
Specifications |
|
|
Starting ramp with progressive increase in voltage and |
|
|
|
||||||
|
|
|
L |
Current limit for starting I /I |
r |
|
||||||
|
|
|
current limitation |
|
|
|
m |
|
||||
|
|
|
|
|
Lmax |
450/N |
|
|
||||
|
Initial voltage (pedestal) |
% |
30 - 95 Un |
|
|
|
|
|
||||
|
Starting torque |
% |
10 - 90 |
Mdirect start |
|
|
Mdirect start |
Full voltage starting torque |
|
|
||
|
Kick start |
% |
95 U |
n |
(90% M |
direct start |
), adjustable 0 to 999 ms |
|
N |
In/Ir |
|
|
|
Motor unit ratio (N) |
|
0.4 - 1.2 |
|
|
|
SF |
Service factor |
|
|
||
|
Current limit (starting) |
|
1 to 4.5 (Ir/In) Max 4.5 In |
|
|
U |
Full line voltage |
|
|
|||
|
Acceleration ramp time |
s |
1 to 45 (standard or linear ramp up) |
|
n |
|
|
|
||||
|
|
|
|
|
|
|||||||
|
Bypass |
|
Direct control of a bypass contactor |
|
|
|
|
|||||
|
Brake time by ramp |
s |
1 to 60 |
(1 to 60 in secondary ramp) adjustable independently of starting |
|
|
||||||
|
|
|
ramp time (types: standard, pump control or linear ramp down) |
|
|
|
||||||
|
Monitoring |
|
Motor current, line voltage (1), power, power factor and elapsed time |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||
Running |
External control |
|
Start - Stop |
|
|
|
|
|
|
|
||
|
Acceleration phase |
|
Adjustable time |
|
|
|
|
|
|
|||
|
Stop phase |
|
Power cut-off / Ramp / Pump control |
|
|
|
|
|||||
|
|
|
|
|
|
|
||||||
Inputs / Outputs |
Inputs |
|
4 digital optocoupled. Two fixed (Start , Stop), and 2 programmable (I3, I4) |
|
|
|||||||
|
|
|
1 Analog 0-5VDC for Tachogenerator input feedback |
|
|
|
|
|||||
|
Outputs |
|
2 Programmable relays (1r, 3r); 1 fixed relay (2r) |
|
|
|
|
|||||
|
|
|
1 Analog 0-10VDC output for current metering |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||
Protections |
Current limit |
|
Adjustable 1 to 4.5 (Ir/In) Max 4.5 In |
|
|
|
|
|||||
|
Overload |
|
IEC class 10 and 20 ; NEMA class 10, 20 and 30 all selectable |
|
|
|
||||||
|
Cool-down time after |
|
|
|
|
|
|
|
|
|
|
|
|
overload trip |
|
See Restart Times on page 4-10 |
|
|
|
|
|||||
|
Loss on input phase |
s |
Trip at 3 |
|
|
|
|
|
|
|
||
|
Thyristor short circuit |
ms |
Trip at 200 |
|
|
|
|
|
|
|
||
|
Heatsink overheating |
ms |
Trip at 200 |
|
|
|
|
|
|
|
||
|
Motor thermistor |
ms |
Trip at 200 if thermistor impedance > response value |
|
|
|
|
|||||
|
Loss on output phase |
s |
Trip at 3 |
|
|
|
|
|
|
|
||
|
Stalled rotor |
ms |
Trip at 200 |
|
|
|
|
|
|
|
||
|
Supply frequency error |
Hz |
If f < 45 or f > 65, will not start |
|
|
|
|
|||||
|
Overcurrent |
|
100 to 150% In; trip time adjustable from 0 to 99 sec. |
|
|
|
|
|||||
|
Undercurrent |
|
0 to 99% In; trip time adjustable from 0 to 99 sec. |
|
|
|
|
|||||
|
Overvoltage (1) |
|
100 to 130% Un; trip time adjustable from 0 to 99 sec. |
|
|
|
|
|||||
|
Undervoltage (1) |
|
0 to 50% Un; trip time adjustable from 0 to 99 sec. |
|
|
|
|
|||||
|
Error (CPU) |
ms |
60 |
|
|
|
|
|
|
|
|
|
|
Memory |
|
4 former errors |
|
|
|
|
|
|
|
||
|
Long start time |
s |
2 x ta (ta = acceleration ramp time) |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||
Environmental |
Temperature |
°C |
0 to +55 (derate output current by 1.5% / °C above 40°C) |
|
|
|
||||||
conditions |
Relative humidity |
% |
95% without condensation |
|
|
|
|
|||||
|
Maximum altitude |
m |
3000 (derate output current by 1% / 100m above 1000m) |
|
|
|
||||||
|
Mounting position |
|
Vertical |
|
|
|
|
|
|
|
||
|
Protection Degree |
|
IP00, UL Open |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
Standards |
cUL, UL |
|
UL, cUL conforming to UL508 |
|
|
|
|
|||||
|
Conducted & radiated emissions |
Conforming IEC 947 -4-2, Class A |
|
|
|
|
||||||
|
Electrostatic discharges |
|
Conforming to IEC 1000-4-2, level 3 |
|
|
|
|
|||||
|
Radioelectric interference |
|
Conforming to IEC 1000-4-6, level 3 and to IEC 1000-4-3, level 3 |
|
|
|
||||||
|
Immunity to fast trasients |
|
Conforming to IEC 1000-4-4, level 3 |
|
|
|
|
|||||
|
Immunity to Surge Voltage |
|
Conforming to IEC 1000-4-5, level 3 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Note: (1) Monitors L1
3-1
|
|
3. Technical Specifications |
|
|
|
|
|
|
|
|
|
3-2. I/O terminal board specifications |
|
|
|
||
|
|
|
|
|
|
Power I/O terminals |
|
|
|
|
|
Terminal |
Function |
Description |
|
|
|
1L1, 3L2, 5L3 |
Mains Input |
3ph input voltage. |
|
|
|
2T1, 4T2, 6T3 |
Motor output |
Output terminals to 3ph AC motor |
|
|
|
TBA1, TBA2 |
Input Control Voltage |
110/120V AC, +10%, -15% |
|
|
|
|
|
|
|
|
|
Digital Inputs |
|
|
|
|
|
Terminal |
Function |
Description |
|
|
|
57 |
Common for digital inputs |
This is a common terminal for the digital input terminals specified below. |
|||
1 |
Run |
Run order. Command signal may be provided by one NO dry momentary contact to terminals 1 and 57. |
|||
2 |
Stop |
Stop order. Command signal may be provided by one NC dry momentary contact to terminals 2 and 57. |
|||
|
|
NOTE: Run/Stop permanent command is allowed linking 1-57 and using one dry NO contact to 2-57 |
|||
|
|
terminals. |
|
|
|
3 |
Programmable input I3 |
These two inputs are programmable. Can be assigned to the following internal functions: |
|||
4 |
Programmable input I4 |
-soft stop |
-linear ramp |
|
|
|
|
|
|
||
|
|
-pump control |
-dual ramp selection |
|
|
|
|
-kick start |
-local / remote control |
|
|
|
|
Command signal should be provided by one NC dry contact to terminals 57-3 or terminals 57-4. |
|||
|
|
By switching this contact ON / OFF it is possible to enable or disable the assigned function. |
|||
|
|
|
|
|
|
Digital Outputs |
|
|
|
|
|
Terminal |
Function |
Description |
|
|
|
11, 12, 14 |
Programmable relay 1r |
11-12 = NC, 11-14 = N.O. dry contacts. This relay can be assigned to several internal output functions (p. 3-5). |
|||
|
|
As default assigned to function RUN |
|
|
|
23, 24 |
Fixed relay 2r |
23-24 = N.O. dry contact. This relay is assigned to function EOR for bypass contactor control |
|||
33, 34 |
Programmable relay 3r |
33-34 = N.O. dry contact. This relay can be assigned to several internal output functions (page 3-5). |
|||
|
|
Common for all relay output contacts Maximum usage voltage: |
380VAC (B300-UL) |
||
|
|
|
Thermal current: |
8A |
|
|
|
|
AC-15 use: |
220V / 3A, 380V / 1A |
|
|
|
|
DC-15 use: |
30V max/ 3.5A |
|
|
|
|
|
|
|
Analog I/O |
|
|
|
|
|
Terminal |
Function |
Description |
|
|
|
8 |
Analog input common (-) |
This is a common terminal for the analog input terminal number 7 and analog output terminal number 9. |
|||
7 |
TG feedback input (+) |
0-5V analog input for speed feedback. It should be provided by a DC tacho-generator coupled to the motor. |
|||
|
|
This speed feedback signal is required when the "linear ramp" function is used. |
|||
9 |
Current output (+) |
0-10V DC analog Output for current measurement purpose. (1 x Ir = 2V DC output) |
|||
|
|
Load Impedance 10KΩ or higher. |
|
|
|
|
|
|
|
|
|
Motor thermistor terminals |
|
|
|
|
|
Terminal |
Function |
Description |
|
|
|
5 , 6 |
Motor thermistor input |
This input allows a motor thermistor with a response value from 2.8 to 3.2KΩ |
, and a reset value from 0.75 to |
||
|
|
1KΩ to control motor temperature. |
|
|
|
|
|
When the motor thermistor is not used, a link must be used between terminals 5-6. |
|||
|
|
|
|
|
|
Communications |
|
|
|
|
|
Terminal |
Function |
Description |
|
|
|
SG, TD, RD |
Gr, Tx, Rx data |
RS232C, 3 wires, half duplex. Maximum cable length 3 meters (10 feet) |
|
||
|
|
Asynchronous data transmission, 9600 Bauds, 1 bit start, 8 bits data, 2 bits stop, no parity. |
|||
|
|
|
|
|
|
3-2

3. Technical Specifications
3-3. I/O wiring
ASTAT-IBP Plus terminal layout and wiring configuration is shown in the diagram below.
|
|
|
|
|
|
|
|
|
|
L1 |
L2 |
L3 |
|
Control Voltage |
|
|
|
|
|
|
|
|
|
|
|
|
|
110 / 120V AC |
|
|
|
|
|
|
|
Serial Comm. |
|
|
|||
|
|
|
|
|
|
|
|
RS232C |
|
|
|||
TBA1 TBA2 |
|
|
|
M2 |
|
|
|
Tx |
Rx Gr |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Bypass |
|
|
|
|
|
|
|
|
||
|
|
12 11 14 |
23 24 |
|
33 34 |
|
TD RD SG |
3 L2 |
5 L3 |
||||
A1 A2 |
B1 B2 |
|
|
|
|
|
|
|
|
1 L1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
M2 |
|
|
|
|
1r |
2r |
|
3r |
|
|
|
|
|
Bypass |
|
|
|
|
Programmable Relay Outputs |
|
|
|
|
|
|
||||
|
|
Programmable Inputs |
|
|
|
|
|
|
|
|
|||
|
|
I3 |
|
I4 |
|
|
|
|
|
2 T1 |
4 T2 |
6 T3 |
|
1 57 |
2 57 |
3 |
57 |
4 |
5 |
6 |
7 |
8 |
9 |
||||
|
|
|
|||||||||||
Start /Stop |
|
|
|
|
|
|
|
|
- |
+ |
|
|
|
(Permanent Command) |
|
|
|
|
|
|
|
|
V |
M |
|
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
+ |
- |
|
|
|
||
|
|
|
|
|
|
|
|
|
3 ~ |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
1 57 |
2 57 |
|
Programmable Inputs |
|
Motor Thermistor |
Input |
Tacho feedback |
Analog Input |
0-10V |
Analog Output |
|
|
|
|
|
|
|
|
|
||||||||
Start |
Stop |
|
|
|
|
|
|
|
|
|
|
|
|
(Command by push-buttons) |
|
|
|
|
|
|
|
|
|
|
|
||
Notes: |
(1) Control and Mains wiring recommendations are given in chapter 5. |
(2)The programmable inputs I3, I4 are not assigned to any function as default. Check pages 3-5 prior to using these inputs.
(3)The programmable relay output is assigned to the following functions as default: Relay (1r): RUN, (RUN status)
(4)Important: Use dry contacts only
3-3

3. Technical Specifications
3-4. Operating modes
Operating Mode |
Key |
Description |
Initial ramp |
1 |
Initial voltage (pedestal) |
1a |
Kick start |
2 |
Acceleration ramp |
3 |
|
4 |
Running mode |
5 |
Soft stop mode |
6 |
Current limit |
|
Ramp continue |
|
Stop mode |
|
7
8
9
5 main frequency cycles
30 to 95% Un (adjustable via initial torque setting T)
95% Un. Enabled by parameter "Pxxx" to ON, 0-999 ms (adjustable) 1-45 sec (adjustable). Dual ramp option.
Fast ramp (if motor is up to speed before end of normal ramp time)
Nominal voltage (bypass mode)
Deceleration ramp 1-60 sec (adjustable). Secondary ramp 1-60 sec.
Ramp down modes available are:
-Soft Stop -Voltage ramp down-. Enabled by "Sxxx" to ON
-Pump control. Selectable by "Sxxx" to ON and "Cxxx" to ON
-Linear ramp down (Tacho feedback needed)
Current limiting set point (100 to 450% x (Ir/In) Max 450% In)
Accelerating ramp (continuation of acceleration after motor amps drop below current limit) Standard stopping (coast to rest)
Starting by voltage ramp
|
U/Un |
|
|
100% |
|
5 |
6 |
|
|
||
|
|
|
|
|
2 |
4 |
|
Starter |
|
|
|
|
8 |
|
|
Output |
|
3 |
|
Voltage (%) |
|
|
|
1a |
1 |
|
|
|
|
|
|
|
|
|
Time |
Starting by current limitation
|
|
|
|
Max |
Motor Current |
|
|
Current to Motor |
|
|
|
450% |
|
|
Output Voltage |
|
5 |
|
|
|
100% |
|
|
|
|
|
|
|
|
4 |
|
|
|
|
Starter |
|
|
Current |
|
||
|
|
|
Set Point |
|||
Output |
|
|
|
Limit |
||
|
|
|
|
|||
Voltage (%) |
7 |
8 |
|
9 |
|
|
1a |
3 |
|
|
|
|
FLA |
|
|
|
|
|
||
Ramp |
Current Limit |
Ramp |
At Speed |
Coast Stop |
Time |
|
|
(Voltage Hold) |
|
|
|
|
|
|
|
|
3-4 |
|
|
|
 Loading...
Loading...