


 Loading...
Loading...
20 |
30 |
40 |
50 |
|
GPS Basics |
|||||
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Introduction to GPS (Global Positioning System)
Version 1.0
English

Contents
Preface ........................................................... |
4 |
1. What is GPS and what does it do ? .......... |
5 |
2. System Overview ....................................... |
6 |
2.1 The Space Segment ............................................... |
6 |
2.2 The Control Segment .............................................. |
8 |
2.3 The User Segment ................................................. |
9 |
3. How GPS works....................................... |
10 |
3.1 Simple Navigation .................................................. |
11 |
3.1.1 Satellite ranging .................................................... |
11 |
3.1.2 Calculating the distance to the satellite ................. |
13 |
3.1.3 Error Sources ........................................................ |
14 |
3.1.4 Why are military receivers more accurate ? ........... |
18 |
3.2 Differentially corrected positions (DGPS) ................ |
19 |
3.2.1 The Reference Receiver ........................................ |
20 |
3.2.2 The Rover receiver ................................................. |
20 |
3.2.3 Further details ....................................................... |
20 |
3.3 Differential Phase GPS andAmbiguity Resolution ... |
22 |
3.3.1 The Carrier Phase, C/A and P-codes .................... |
22 |
3.3.2 Why use Carrier Phase? ....................................... |
23 |
3.3.3 Double Differencing............................................... |
23 |
3.3.4 Ambiguity and Ambiguity Resolution ...................... |
24 |
4. Geodetic Aspects..................................... |
26 |
4.1 Introduction ........................................................... |
27 |
4.2. The GPS coordinate system ................................. |
28 |
4.3 Local coordinate systems ...................................... |
29 |
4.4 Problems with height ............................................. |
30 |
4.5 Transformations ..................................................... |
31 |
4.6 Map Projections and Plane Coordinates ................. |
34 |
4.6.1 The Transverse Mercator Projection ...................... |
35 |
4.6.2 The Lambert Projection ......................................... |
37 |
5. Surveying with GPS ................................ |
38 |
5.1 GPS Measuring Techniques .................................. |
39 |
5.1.1 Static Surveys ........................................................ |
40 |
5.1.2 Rapid Static Surveys .............................................. |
42 |
5.1.3 Kinematic Surveys ................................................. |
44 |
5.1.4 RTK Surveys .......................................................... |
45 |
5.2 Pre-survey preparation ........................................... |
46 |
5.3 Tips during operation ............................................. |
46 |
Glossary ....................................................... |
48 |
Further Reading .......................................... |
59 |
Index ............................................................. |
60 |
2 |
GPS Basics -1.0.0en |

View of chapters
Preface |
4 |
|
|
|
|
1. What is GPS and what does it do? |
5 |
|
|
|
|
2. System Overview |
6 |
|
|
|
|
3. How GPS works |
10 |
|
|
|
|
4. Geodetic Aspects |
26 |
|
|
|
|
5. Surveying with GPS |
38 |
|
|
|
|
Glossary |
48 |
|
|
|
|
Index |
60 |
|
|
GPS Basics -1.0.0en |
3 |
View of chapters |

Preface
Why have we written this book and who should read it?
Leica manufactures, amongst other things, GPS hardware and software. This hardware and software is used by many professionals in many applications. One thing that almost all of our users have in common is that they are not GPS scientists or experts in Geodesy. They are using GPS as a tool to complete a task. Therefore, it is useful to have background information about what GPS is and how it works.
This book is intended to give a novice or potential GPS user a background in the subject of GPS and Geodesy. It is not a definitive technical GPS or Geodesy manual. There are many texts of this sort available, some of which are included in the reading list on the back pages.
This book is split into two main sections. The first explains GPS and how it works. The second explains the fundamentals of geodesy.
Preface |
4 |
GPS Basics -1.0.0en |
1. What is GPS and what does it do ?
GPS is the shortened form of NAVSTAR GPS. This is an acronym for NAVigation System with Time And Ranging Global Positioning System.
GPS is a solution for one of man’s longest and most troublesome problems. It provides an answer to the question ‘Where on earth am I ?’
One can imagine that this is an easy question to answer. You can easily locate yourself by looking at objects that surround you and position yourself relative to them. But what if you have no objects around you ? What if you are in the middle of the desert or in the middle of the ocean ? For many centuries, this problem was solved by using the sun
and stars to navigate. Also, on land, surveyors and explorers used familiar reference points from which to base their measurements or find their way.
These methods worked well within certain boundaries. Sun and stars cannot be seen when it is cloudy. Also, even with the most precise measurements position cannot be determined very accurately.
After the second world war, it became apparent to the U.S. Department of Defense that a solution had to be found to the problem of accurate, absolute positioning. Several projects and experiments ran during the next 25 years or so, including Transit, Timation, Loran, Decca etc. All of these projects allowed positions to be determined but were limited in accuracy or functionality.
At the beginning of the 1970s, a new project was proposed – GPS. This concept promised to fulfill all the requirements of the US government, namely that one should be able to determine ones position accurately, at any point on the earth’s surface, at any time, in any weather conditions.
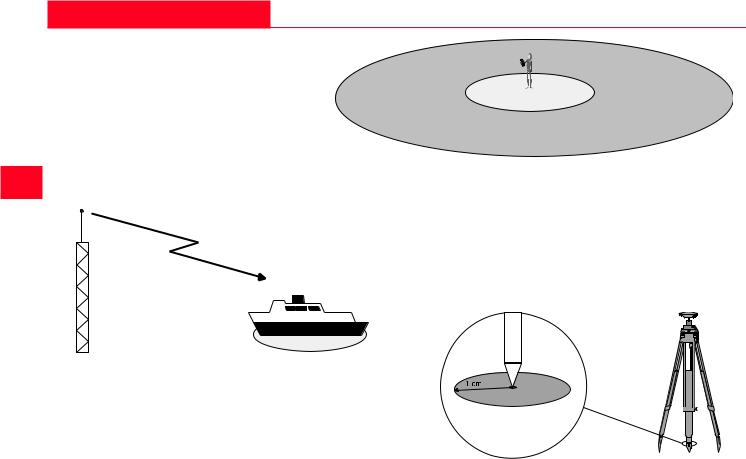
GPS is a satellite-based system that uses a constellation of 24 satellites to give a user an accurate position. It is important at this point to define ’accurate’. To a hiker or soldier in the desert, accurate means about 15m. To a ship in coastal waters, accurate means 5m. To a land surveyor, accurate means 1cm or less. GPS can be used to achieve all of these accuracies in all of these applications, the difference being the type of GPS receiver used and the technique employed.
GPS was originally designed for military use at any time anywhere on the surface of the earth. Soon after the original proposals were made, it became clear that civilians could also use GPS, and not only for personal positioning (as was intended for the military). The first two major civilian applications to emerge were marine navigation and surveying. Nowadays applications range from incar navigation through truck fleet management to automation of construction machinery.
4
5
GPS Basics -1.0.0en |
5 |
What is GPS and SystemwhatdoesOverviewit do ? |
|
|
2. System Overview |
2.1 The Space Segment |
The total GPS configuration is comprised of three distinct segments:
•The Space Segment – Satellites orbiting the earth.
•The Control Segment – Stations positioned on the earth’s equator to control the satellites
•The User Segment – Anybody that receives and uses the GPS signal.
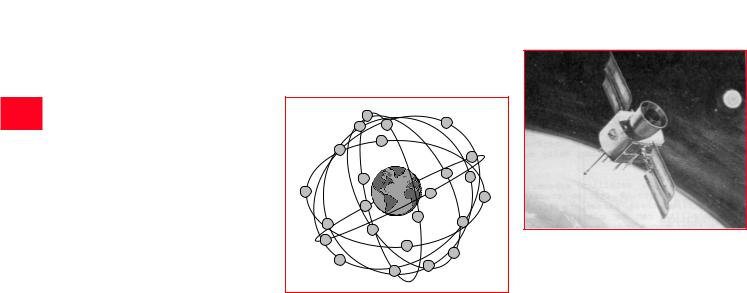
The Space Segment is designed to consist of 24 satellites orbiting the earth at approximately 20200km every 12 hours. At time of writing there are 26 operational satellites orbiting the earth.
15° for most of the time and quite often there are 6 or 7 satellites visible.
GPS Satellite Constellation
The space segment is so designed that there will be a minimum of 4 satellites visible above a 15° cut-off angle at any point of the earth’s surface at any one time. Four satellites are the minimum that must be visible for most applications. Experience shows that there are usually at least 5 satellites visible above
GPS satellite
Each GPS satellite has several very accurate atomic clocks on board. The clocks operate at a fundamental frequency of 10.23MHz. This is used to generate the signals that are broadcast from the satellite.
System Overview |
6 |
GPS Basics -1.0.0en |
The satellites broadcast two carrier waves constantly. These carrier waves are in the L-Band (used for radio), and travel to earth at the speed of light. These carrier waves are derived from the fundamental frequency, generated by a very precise atomic clock:
•The L1 carrier is broadcast at 1575.42 MHz (10.23 x 154)
•The L2 carrier is broadcast at 1227.60 MHz (10.23 x 120).
The L1 carrier then has two codes modulated upon it. The C/A Code or Coarse/Acquisition Code is modulated at 1.023MHz (10.23/10) and the P-code or Precision Code is modulated at 10.23MHz). The L2 carrier has just one code modulated upon it. The L2 P-code is modulated at 10.23 MHz.
GPS receivers use the different codes to distingush between satellites. The codes can also be used as a basis for making pseudorange measurements and therefore calculate a position.
4
5
Fundamental |
|
|
|
|
|
|
|
||||
Frequency |
|
|
|
|
|
|
|
||||
10.23 Mhz |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
÷10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L1 |
C/A Code |
P-Code |
|
||
|
×154 |
|
|
|
1575.42 Mhz |
1.023 Mhz |
10.23 Mhz |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L2 |
|
|
P-Code |
|
|
×120 |
|
|
|
1227.60 Mhz |
|
|
10.32 Mhz |
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
GPS Signal Structure |
|
|
|
|
|
|
|
||||
GPS Basics -1.0.0en |
7 |
System Overview |
2.2 The Control Segment
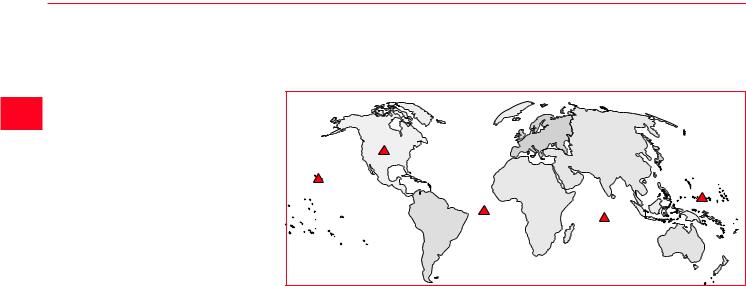
The Control Segment consists of one master control station, 5 monitor stations and 4 ground antennas distributed amongst 5 locations roughly on the earth’s equator.
The Control Segment tracks the GPS satellites, updates their orbiting position and calibrates and sychronises their clocks.
A further important function is to determine the orbit of each satellite and predict it’s path for the following 24 hours. This information is uploaded to each satellite and subsequently broadcast from it. This enables the GPS receiver to know where each satellite can be expected to be found.
The satellite signals are read at Ascension, Diego Garcia and Kwajalein. The measurements are then sent to the Master Control Station in Colorado Springs where they are processed to determine any errors in each satellite. The information is then sent back to the four monitor stations equipped with ground antennas and uploaded to the satellites.
C o l o r a d o S p r i n g s |
|
H a w a i i |
K w a j a l |
|
|
|
A s c e n s i o n |
|
D i e g o G a r c i a |
Control Segment Station Locations
System Overview |
8 |
GPS Basics -1.0.0en |
2.3 The User Segment
The User Segment comprises of anyone using a GPS receiver to receive the GPS signal and determine their position and/ or time. Typical applications within the user segment are land navigation for hikers, vehicle location, surveying, marine navigation, aerial navigation, machine control etc.
4
5
GPS Basics -1.0.0en |
9 |
System Overview |
3. How GPS works
There are several different methods for obtaining a position using GPS. The method used depends on the accuracy required by the user and the type of GPS receiver available. Broadly speaking, the techniques can be broken down into three basic classes:
Autonomous Navigation using a single stand-alone receiver. Used by hikers, ships that are far out at sea and the military. Position Accuracy is better than 100m for civilian users and about 20m for military users.
Differential Phase position. Gives an accuracy of 0.5-20mm.
Used for many surveying tasks, machine control etc.
Differentially corrected positioning. More commonly known as DGPS, this gives an accuracy of between 0.5-5m. Used for inshore marine navigation, GIS data acquisition, precision farming etc.
How GPS works |
10 |
GPS Basics -1.0.0en |
3.1 Simple Navigation |
3.1.1 Satellite ranging |
|
|
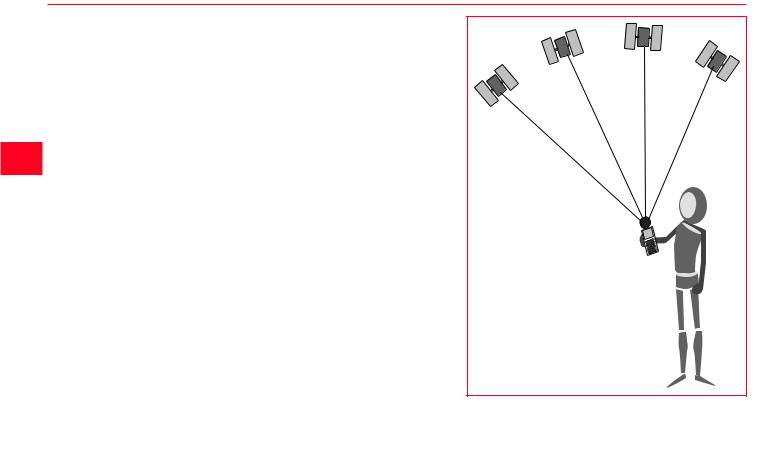
This is the most simple technique employed by GPS receivers to instantaneously give a position and height and/ or accurate time to a user. The accuracy obtained is better than 100m (usually around the 30-50m mark) for civilian users and 5-15m for military users. The reasons for the difference between civilian and military accuracies are given later in this section. Receivers used for this type of operation are typically small, highly portable handheld units with a low cost.
All GPS positions are based on measuring the distance from the satellites to the GPS receiver on the earth. This distance to each satellite can be determined by the GPS receiver. The basic idea is that of resection, which many surveyors use in their daily work. If you know the distance to three points relative to your own position, you can determine your own position relative to those three points. From the distance to one satellite we know that the position of the receiver must be at some point on the surface of an imaginary sphere which has it’s origin at the satellite. By intersecting three imaginary spheres the receiver position can be determined.
4
5
6
Intersection of three imaginary spheres
A Handheld GPS Receiver
GPS Basics -1.0.0en |
11 |
How GPS works |
The problem with GPS is that only pseudoranges and the time at which the signal arrived at the receiver can be determined.
Thus there are four unknowns to determine; position (X, Y, Z) and time of travel of the signal. Observing to four satellites produces four equations which can be solved, enabling these unknowns to be determined.
At least four satellites are required to obtain a position and time in 3 dimensions
How GPS works |
12 |
GPS Basics -1.0.0en |

3.1.2 Calculating the distance to the satellite
In order to calculate the distance to each satellite, one of Isaac Newton’s laws of motion is used:
Distance = Velocity x Time
For instance, it is possible to calculate the distance a train has traveled if you know the velocity it has been travelling and the time for which it has been travelling at that velocity.
GPS requires the receiver to calculate the distance from the receiver to the satellite.
The Velocity is the velocity of the radio signal. Radio waves travel at the speed of light, 290,000 km per second (186,000 miles per second).
The Time is the time taken for the radio signal to travel from the satellite to the GPS receiver. This is a little harder to calculate, since you need to know when the radio signal left the satellite and when it reached the receiver.
Calculating the Time
The satellite signal has two codes modulated upon it, the C/A code and the P-code (see section 2.1). The C/A code is based upon the time given by a very accurate atomic clock. The receiver also contains a clock that is used to generate a matching C/A code. The GPS receiver is then able to “match” or correlate the incoming satellite code to the receiver generated code.
The C/A code is a digital code that is ‘pseudo random’ or appears to be random. In actual fact it is not random and repeats one thousand times every second.
In this way, the time taken for the radio signal to travel from the satellite to the GPS receiver is calculated.
4
5
6
GPS Basics -1.0.0en |
13 |
How GPS works |
3.1.3 Error Sources
Up until this point, it has been assumed that the position derived from GPS is very accurate and free of error, but there are several sources of error that degrade the GPS position from a theoretical few metres to tens of metres. These error sources are:
1.Ionospheric and atmospheric delays
2.Satellite and Receiver Clock Errors
3.Multipath
4.Dilution of Precision
5.Selective Availability (S/A)
6.Anti Spoofing (A-S)
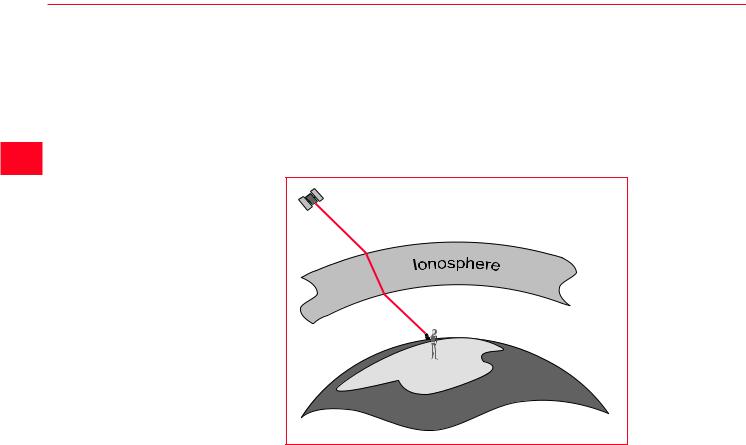
1. Ionospheric and Atmospheric delays
As the satellite signal passes through the ionosphere, it can be slowed down, the effect being similar to light refracted through a glass block. These atmospheric delays can introduce an error in the range calculation as the velocity of the signal is affected. (Light only has a constant velocity in a vacuum).
The ionosphere does not introduce a constant delay on the signal. There are several factors that influence the amount of delay caused by the ionosphere.
How GPS works |
14 |
GPS Basics -1.0.0en |
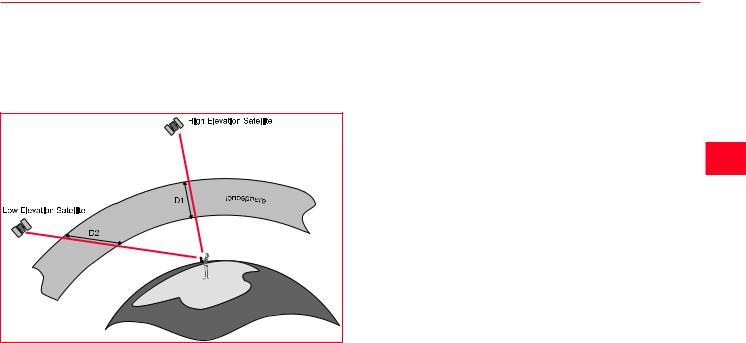
a. Satellite elevation. Signals from low elevation satellites will be affected more than signals from higher elevation satellites. This is due to the increased distance that the signal passes through the atmosphere.
The amount by which the density of the ionosphere is increased varies with solar cycles (sunspot activity).
Sunspot activity peaks approximately every 11 years. At the time of writing, the
next peak (solar max) will be around the year 2000.
In addition to this, solar flares can also randomly occur and also have an effect on the ionosphere.
Ionospheric errors can be mitigated by using one of two methods:
b. The density of the ionosphere is affected by the sun. At night, there is very little ionospheric influence. In the day, the sun increases the effect of the ionosphere and slows down the signal.
- The first method involves taking an average of the
effect of the reduction in velocity of light caused by the ionosphere. This correction factor can then be applied to the range calculations. However, this relies on an average and obviously this
average condition does not occur all of the time. This method is therefore not the optimum solution to Ionospheric Error mitigation.
- The second method involves using “dual-frequency” GPS receivers. Such receivers measure the L1 and the L2 frequencies of the GPS signal. It is known that when a radio signal travels through the ionosphere it slows down at a rate inversely proportional to it’s frequency. Hence, if the arrival times of the two signals are compared, an accurate estimation of the delay can be made. Note that this is only possible with dual frequency GPS receivers. Most receivers built for navigation are single frequency.
c. Water Vapour also affects the GPS signal. Water vapor contained in the atmosphere can also affect the GPS signal. This effect, which can result in a position degradation can be reduced by using atmospheric models.
4
5
6
GPS Basics -1.0.0en |
15 |
How GPS works |

2. Satellite and Receiver clock errors
Even though the clocks in the satellite are very accurate (to about 3 nanoseconds), they do sometimes drift slightly and cause small errors, affecting the accuracy of the position. The US Department of Defense monitors the satellite clocks using the Control Segment (see section 2.2) and can correct any drift that is found.
3. Multipath Errors
Multipath occurs when the receiver antenna is positioned close to a large reflecting surface such as a lake or building. The satellite signal does not travel directly to the antenna but hits the nearby object first and is reflected into the antenna creating a false measurement.
Multipath can be reduced by use of special GPS antennas that incorporate a ground plane (a circular, metallic disk about 50cm (2 feet) in diameter) that prevent low elevation signals reaching the antenna.
For highest accuracy, the preferred solution is use of a choke ring antenna. A choke ring antenna has 4 or 5 concentric rings around the antenna that trap any indirect signals.
Multipath only affects high accuracy, surveytype measurements. Simple handheld navigation receivers do not employ such techniques.
Choke-Ring Antenna
How GPS works |
16 |
GPS Basics -1.0.0en |
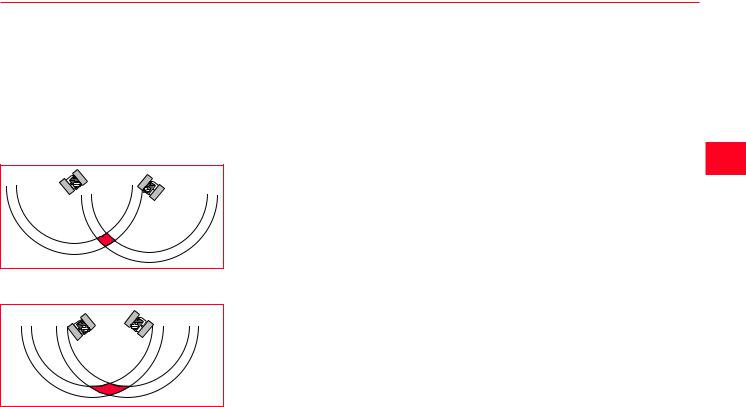
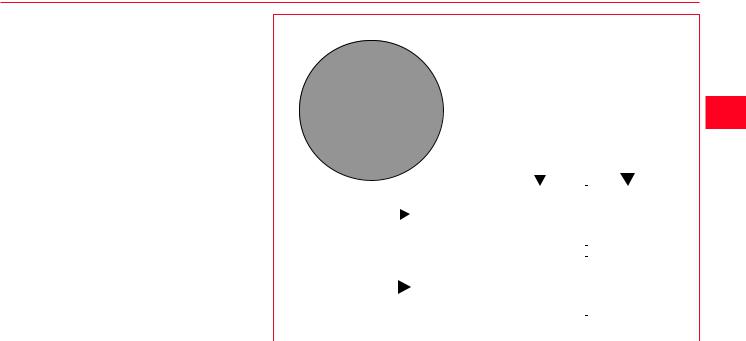
4. Dilution of Precision
The Dilution of Precision (DOP) is a measure of the strength of satellite geometry and is related to the spacing and position of the satellites in the sky. The DOP can magnify the effect of satellite ranging errors.
The principle can be best illustrated by diagrams:
Well spaced satellites - low uncertainty of position
Poorly spaced satellites - high uncertainty of position
The range to the satellite is affected by range errors previously described. When the satellites are well spaced, the position can be determined as being within the shaded area in the diagram and the possible error margin is small.
When the satellites are close together, the shaded area increases in size, increasing the uncertainty of the position.
Different types of Dilution of Precision or DOP can be calculated depending on the dimension.
VDOP – Vertical Dilution of Precision. Gives accuracy degradation in vertical direction.
HDOP – Horizontal Dilution of Precision. Gives accuracy degradation in horizontal direction.
PDOP – Positional Dilution of Precision. Gives accuracy degradation in 3D position.
GDOP – Geometric Dilution of Precision. Gives accuracy degradation in 3D position and time.
The most useful DOP to know is GDOP since this is a combination of all the factors. Some receivers do however calculate PDOP or HDOP which do not include the time component.
The best way of minimizing the effect of GDOP is to observe as many satellites as possible. Remember however, that the signals from low elevation satellites are generally influenced to a greater degree by most error sources.
As a general guide, when surveying with GPS it is best to observe satellites that are 15° above the horizon. The most accurate positions will generally be computed when the GDOP is low, (usually 8 or less).
4
5
6
GPS Basics -1.0.0en |
17 |
How GPS works |
3.1.4 Why are military receivers more accurate ?
5. Selective Availability (S/A)
Selective Availability is a process applied by the U.S. Department of Defense to the GPS signal. This is intended to deny civilian and hostile foreign powers the full accuracy of GPS by subjecting the satellite clocks to a process known as ‘dithering’ which alters their time slightly. Additionally, the ephemeris (or path that the satellite will follow) is broadcast as being slightly different from what it is in reality. The end result is a degradation in position accuracy.
It is worth noting that S/A affects civilian users using a single GPS receiver to obtain an autonomous position. Users of differential systems are not significantly affected by S/A.
Currently, it is planned that S/A will be switched off by 2006 at the latest.
6. Anti-Spoofing (A-S)
Anti-Spoofing is similar to S/A in that it’s intention is to deny civilian and hostile powers access to the P-code part of the GPS signal and hence force use of the C/A code which has S/A applied to it.
Anti-Spoofing encrypts the P-code into a signal called the Y-code. Only users with military GPS receivers (the US and it’s allies) can de-crypt the Y-code.
Military receivers are more accurate because they do not use the C/A code to calculate the time taken for the signal to reach the receiver. They use the P-code.
The P-code is modulated onto the carrier wave at 10.23 Hz. The C/A code is modulated onto the carrier wave at 1.023 Hz. Ranges can be calculated far more
accurately using the P-code as this code is occurring 10 times as often as the C/A
code per second.
The P-code is often subjected to Anti Spoofing (A/S) as described in the last section. This means that only the military, equipped with special GPS receivers can read this encryted P-code (also known as the Y-code).
For these reasons, users of military GPS receivers usually get a position with an accuracy of around 5m whereas, civilian users of comparable GPS receivers will only get between about 15-100m position accuracy.
A military handheld GPS receiver (courtesy Rockwell)
How GPS works |
18 |
GPS Basics -1.0.0en |

3.2 Differentially corrected positions (DGPS)
Many of the errors affecting the measurement of satellite range can be completely eliminated or at least significantly reduced using differential measurement techniques.
DGPS allows the civilian user to increase position accuracy from 100m to 2-3m or less, making it more useful for many civilian applications.
4
5
6
DGPS Reference station broadcasting to Users
GPS Basics -1.0.0en |
19 |
How GPS works |
3.2.1 The Reference Receiver |
3.2.2 The Rover receiver |
3.2.3 Further details |
|
|
|
The Reference receiver antenna is mounted on a previously measured point with known coordinates. The receiver that is set at this point is known as the Reference Receiver or Base Station.
The receiver is switched on and begins to track satellites. It can calculate an autonomous position using the techniques mentioned in section 3.1.
Because it is on a known point, the reference receiver can estimate very precisely what the ranges to the various satellites should be.
The reference receiver can therefore work out the difference between the computed and measured range values. These differences are known as corrections.
The reference receiver is usually attached to a radio data link which is used to broadcast these corrections.
The rover receiver is on the other end of these corrections. The rover receiver has a radio data link attached to it that enables it to receive the range corrections broadcast by the Reference Receiver.
The Rover Receiver also calculates ranges to the satellites as described in section 3.1. It then applies the range corrections received from the Reference. This lets it calculate a much more accurate position than would be possible if the uncorrected range measurements were used.
Using this technique, all of the error sources listed in section 3.1.3 are minimized, hence the more accurate position.
It is also worthwhile to note that multiple Rover Receivers can receive corrections from one single Reference.
DGPS has been explained in a very simple way in the preceding sections. In real life, it is a little more complex than this.
One large consideration is the radio link. There are many types of radio link that will broadcast over different ranges and frequencies. The performance of the radio link depends on a range of factors including:
•Frequency of the radio
•Power of the radio
•Type and ‘gain’ of radio antenna
•Antenna position
Networks of GPS receivers and powerful radio transmitters have been established, broadcasting on a “maritime only” safety frequency. These are known as Beacon Transmitters. The users of this service (mostly marine craft navigating in coastal waters) just need to purchase a Rover receiver that can receive the beacon signal. Such systems have been set up around the coasts of many countries.
How GPS works |
20 |
GPS Basics -1.0.0en |
Loading...