


GE Consumer & Industrial
Electrical Distribution
AF-60 LP™ Micro Drive
Programming Guide
imagination at work
AF-60 LP™ Micro Drive Programming Guide
Contents
1. Safety |
3 |
Safety Instructions |
3 |
Software Version and Approvals |
3 |
General Warning |
3 |
Avoid unintended Start |
4 |
Before Commencing Repair Work |
4 |
2. Introduction |
5 |
AF-60 LP Micro Drive Model Number System Diagram |
5 |
3. Programming |
7 |
How to Programme |
7 |
Programming with DCT-10 Set-up Software |
7 |
Programming with the Keypad |
7 |
Status Menu |
9 |
Quick Menu |
9 |
Main Menu |
10 |
4. Parameter Descriptions |
11 |
Parameter group 0: Operation/Display |
11 |
Parameter Group 1: Load/Motor |
15 |
Parameter Group 2: Brakes |
22 |
Parameter Group 3: Reference/Ramps |
25 |
Parameter Group 4: Limits/Warnings |
30 |
Parameter Group 5: Digital In/Out |
32 |
Parameter Group 6: Analogue In/Out |
36 |
Parameter Group 7: Controllers |
41 |
Parameter Group 8: Communication |
43 |
Parameter Group 13: Logic Controller |
47 |
Parameter Group 14: Special Functions |
54 |
Parameter Group 15: Drive Information |
56 |
Parameter Group 16: Data Readouts |
58 |
16-09 Custom Readout |
58 |
5. Parameter Lists |
63 |
Conversion Index |
67 |
Change during operation |
67 |
2-Set-up |
67 |
Type |
67 |
0-** Operation/Display |
68 |
1-** Load/Motor |
69 |
1

|
AF-60 LP™ Micro Drive Programming Guide |
2-** Brakes |
70 |
3-** Reference/Ramps |
71 |
4-** Limits/Warnings |
72 |
5-** Digital In/Out |
73 |
6-** Analog In/Out |
74 |
7-** Controllers |
75 |
8-** Comm. and Options |
76 |
13-** Logic Controller |
77 |
14-** Special Functions |
78 |
15-** Drive Information |
79 |
16-** Data Readouts |
80 |
6. Troubleshooting |
81 |
Alarm, Warning and Extended Status Word |
82 |
Index |
83 |
2
AF-60 LP™ Micro Drive Programming Guide
1. Safety
1
1.1.1. High Voltage Warning
The voltage of the frequency converter is dangerous whenever it is connected to mains. Incorrect installation of the motor or frequency converter may cause damage to the equipment, serious injury or death. Consequently, it is essential to comply with the instructions in this manual as well as local and national rules and safety regulations.
1.1.2. Safety Instructions
•Make sure the frequency converter is properly connected to earth.
•Do not remove mains connections, motor connections or other power connections while the frequency converter is connected to power.
•Protect users against supply voltage.
•Protect the motor against overloading according to national and local regulations.
•The earth leakage current exceeds 3.5 mA.
•The [OFF] key is not a safety switch. It does not disconnect the frequency converter from mains.
1.1.3. Software Version and Approvals
Software Version
Programming Guide
AF-60 LP Micro Drive
This Programming Guide can be used for all AF-60 LP Micro Drive frequency drives with software version 2.1x.
The software version number can be read in parameter 15-43.
1.1.4. General Warning
Warning:
Touching the electrical parts may be fatal - even after the equipment has been disconnected from mains.
Also make sure that other voltage inputs have been disconnected (such as external DC bus power supplies).
Be aware that there may be high voltage on the DC link even when the LEDs are turned off.
Before touching any potentially live parts of the frequency converter, wait at least 4 minutes for all sizes.
Shorter time is allowed only if indicated on the nameplate for the specific unit.
3
AF-60 LP™ Micro Drive Programming Guide
Leakage Current
The earth leakage current from the frequency converter exceeds 3.5 mA. According to IEC 61800-5-1 a reinforced Protective Earth connection
1 must be ensured by means of a min. 10mm² Cu or an addtional PE wire - with the same cable cross section as the Mains wiring - must be terminated separately.
Residual Current Device
This product can cause a DC current in the protective conductor. Where a residual current device (RCD) is used for extra protection, only an RCD of Type B (time delayed) shall be used on the supply side of this product.
Protective earthing of the frequency converter and the use of RCDs must always follow national and local regulations.
Motor overload protection is possible by setting Parameter 1-90 Motor thermal protection to the value Electronic overload trip. For the North American market: Electronic overload functions provide class 20 motor overload protection, in accordance with NEC.
Installation in high altitudes:
For altitudes above 2 km, please contact GE .
1.1.5. IT Mains
IT Mains
Installation on isolated mains source, i.e. IT mains.
Max. supply voltage allowed when connected to mains: 440 V.
As an option, GE offers line filters for improved harmonics performance.
1.1.6. Avoid unintended Start
While the frequency converter is connected to mains, the motor can be started/stopped using digital commands, bus commands, references or via the drive Keypad.
•Disconnect the frequency converter from mains whenever personal safety considerations make it necessary to avoid unintended start of any motors.
•To avoid unintended start, always activate the [OFF] key before changing parameters.
1.1.7. Disposal Instruction
Equipment containing electrical components must not be disposed of together with domestic waste.
It must be separately collected with electrical and electronic waste according to local and currently valid legislation.
1.1.8. Before Commencing Repair Work
1. |
Disconnect AF-60 LP Micro Drive from mains (and external DC supply, if present.) |
2.Wait for 4 minutes for discharge of the DC-link.
3.Disconnect DC bus terminals and brake terminals (if present)
4.Remove motor cable
4

AF-60 LP™ Micro Drive Programming Guide
2. Introduction
2.1.1. Drive Identification
Below is an example of the frequency converter nameplate sticker. This sticker is located on the top of each frequency converter and shows the ratings, serial |
2 |
number, warnings catalog number, and other relevant data for each unit. See following tables for details, how to read the Type code string. |
|
130BA505
Illustration 2.1: This example shows the identification sticker.
2.1.2. AF-60 LP Micro Drive Model Number System Diagram
5

AF-60 LP™ Micro Drive Programming Guide
2.1.3. Symbols
Symbols used in this Programming Guide.
2 |
NB! |
|
Indicates something to be noted by the reader. |
||
|
Indicates a general warning.
Indicates a high-voltage warning.
*Indicates default setting
2.1.4.Abbreviations and Standards
|
Abbreviations: |
Terms: |
SI-units: |
I-P units: |
|
|
|
Acceleration |
m/s2 |
ft/s2 |
|
|
AWG |
American wire gauge |
|
|
|
|
Auto Tune |
Automatic Motor Tuning |
|
|
|
|
rC |
Celsius |
|
|
|
|
|
Current |
A |
Amp |
|
|
ILIM |
Current limit |
|
|
|
|
|
Energy |
J = N·m |
ft-lb, Btu |
|
|
rF |
Fahrenheit |
|
|
|
|
FC |
Frequency Converter |
|
|
|
|
|
Frequency |
Hz |
Hz |
|
|
kHz |
Kilohertz |
|
|
|
|
LCP |
Local Control Panel |
|
|
|
|
mA |
Milliampere |
|
|
|
|
ms |
Millisecond |
|
|
|
|
min |
Minute |
|
|
|
|
MCT |
Motion Control Tool |
|
|
|
|
M-TYPE |
Motor Type Dependent |
|
|
|
|
Nm |
Newton Metres |
|
in-lbs |
|
|
IM,N |
Nominal motor current |
|
|
|
|
fM,N |
Nominal motor frequency |
|
|
|
|
PM,N |
Nominal motor power |
|
|
|
|
UM,N |
Nominal motor voltage |
|
|
|
|
par. |
Parameter |
|
|
|
|
PELV |
Protective Extra Low Voltage |
|
|
|
|
|
Power |
W |
Btu/hr, hp |
|
|
|
Pressure |
Pa = N/m² |
psi, psf, ft of water |
|
|
IINV |
Rated Inverter Output Current |
|
|
|
|
RPM |
Revolutions Per Minute |
|
|
|
|
SR |
Size Related |
|
|
|
|
|
Temperature |
˚C |
˚F |
|
|
|
Time |
s |
s,hr |
|
|
TLIM |
Torque limit |
|
|
|
|
|
Voltage |
V |
V |
|
|
|
|
|
|
|
Table 2.2: Abbreviation and Standards table . |
|
|
|
|
|
6

AF-60 LP™ Micro Drive Programming Guide
3. Programming
3.1. How to Programme
3.1.1. Programming with DCT-10 Set-up Software
The frequency converter can be programmed from a PC via RS485 com-port by installing the DCT-10 Set-up Software. |
3 |
|
|
||
This software can be downloaded from the GE Web site: www.geelectrical.com/drives |
|
|
|
||
3.1.2. Programming with the Keypad |
|
|
The Keypad is divided into four functional groups: |
|
|
1. |
Numeric display. |
|
2. |
Menu key. |
|
3. |
Navigation keys. |
|
4. |
Operation keys and indicator lights (LEDs). |
|
NB!
Parameters should be changed in numerical order. Certain parameter values are affected by preceding changes.
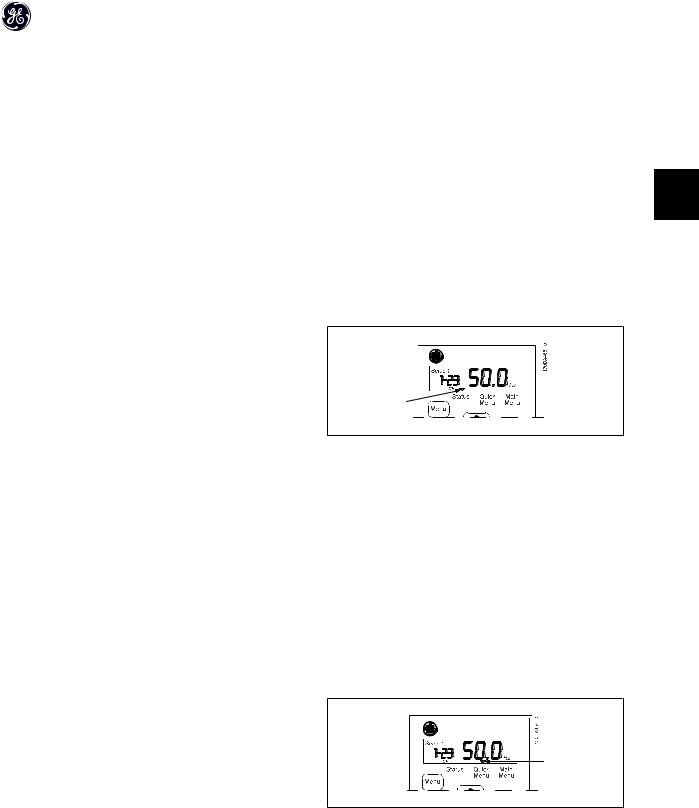
Illustration 3.1: Keypad with potentiometer
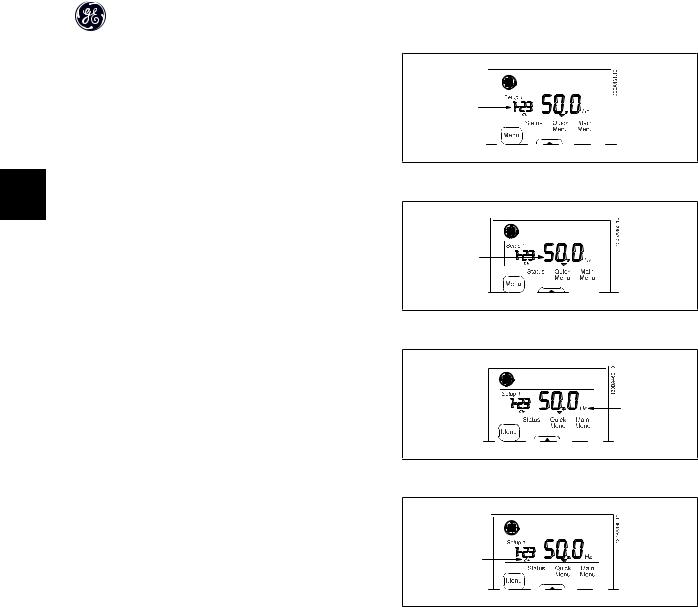
The display:
A number of information can be read from the display.
Set-up number shows the active set-up and the edit set-up. If the same setup acts as both active and edit set-up, only that set-up number is shown (factory setting).
When active and edit set-up differ, both numbers are shown in the display (Setup 12). The number flashing, indicates the edit set-up.
Illustration 3.3: Indicating Set-up
7
AF-60 LP™ Micro Drive Programming Guide
The small digits to the left are the selected parameter number.
3
The large digits in the middle of the display show the value of the selected parameter.
The right side of the display shows the unit of the selected parameter. This can be either Hz, A, V, kW, HP, %, s or RPM.
Motor direction is shown to the bottom left of the display - indicated by a small arrow pointing either clockwise or counterclockwise.
Illustration 3.4: Indicating selected par. no.
Illustration 3.5: Indicating value of selected par.
Illustration 3.6: Indicating unit of selected par.
Illustration 3.7: Indicating motor direction
Use the [MENU] key to select one of the following menus:
Status Menu:
The Status Menu is either in Readout Mode or Hand Mode. In Readout Mode the value of the currently selected readout parameter is shown in the display.
In Hand Mode the local Keypad reference is displayed.
Quick Menu:
Displays Quick Menu parameters and their settings. Parameters in the Quick Menu can be accessed and edited from here. Most applications can be run by setting the parameters in the Quick Menus.
Main Menu:
Displays Main Menu parameters and their settings. All parameters can be accessed and edited here. A parameter overview is found later in this manual.
Indicator lights:
•Green LED: The frequency converter is on.
•Yellow LED: Indicates a warning. Please see section Troubleshooting
•Flashing red LED: Indicates an alarm. Please see section Troubleshooting
8
AF-60 LP™ Micro Drive Programming Guide
Navigation Keys:
[Back]: For moving to the previous step or layer in the navigation structure.
Arrows [ ] [ ]: For maneuvering between parameter groups, parameters and within parameters.
[OK]: For selecting a parameter and for accepting changes to parameter settings.
Operation Keys:
A yellow light above the operation keys indicates the active key.
[Hand ]: Starts the motor and enables control of the frequency converter via the Keypad.
[Off/Reset]: The motor stops except in alarm mode. In that case the motor will be reset. 3
[Auto ]: The frequency converter is controlled either via control terminals or serial communication.
[Potentiometer] Keypad: The potentiometer works in two ways depending on the mode in which the frequency converter is running. In Auto Mode the potentiometer acts as an extra programmable analog input.
In Hand Mode the potentiometer controls local reference.
3.2. Status Menu
After power up the Status Menu is active. Use the [MENU] key to toggle between Status, Quick Menu and Main Menu.
Arrows [ ] and [ ] toggles between the choices in each menu.
The display indicates the status mode with a small arrow above “Status”.
Illustration 3.8: Indicating Status mode
3.3. Quick Menu
The Quick Menu gives easy access to the most frequently used parameters.
1.To enter the Quick Menu, press [MENU] key until indicator in display is placed above Quick Menu.
2.Use [ ] [ ] to select either QM1 or QM2, then press [OK].
3.Use [ ] [ ] to browse through the parameters in the Quick Menu.
4.Press [OK] to select a parameter.
5.Use [ ] [ ] to change the value of a parameter setting.
6.Press [OK] to accept the change.
7.To exit, press either [Back] twice to enter Status, or press [Menu] once to enter Main Menu.
Illustration 3.9: Indicating Quick Menu mode
9
AF-60 LP™ Micro Drive Programming Guide
3.4. Main Menu
The Main Menu gives access to all parameters.
1.To enter the Main Menu, press [MENU] key until indicator in display is placed above Main Menu.
2.Use [ ] [ ] to browse through the parameter groups.
33. Press [OK] to select a parameter group.
4.Use [ ] [ ] to browse through the parameters in the specific group.
5.Press [OK] to select the parameter.
6.Use [ ] [ ] to set/change the parameter value.
7.Press [OK] to accept the value.
8.To exit, press either [Back] twice to enter Quick Menu, or press [Menu] once to enter Status.
Illustration 3.10: Indicating Main Menu mode
10

AF-60 LP™ Micro Drive Programming Guide
4. Parameter Descriptions
4.1. Parameter group 0: Operation/Display
0-03 Regional Settings
Option: |
|
Function: |
|
|
|
|
In order to meet the needs for different default settings in different parts of the world, par. 0-03, Regional Settings, is |
|
|
|
|
implemented in the frequency converter. The selected setting influences the default setting of the motor nominal |
|
|
|
|
|
||
|
|
frequency. |
|
4 |
[0 ] |
International |
Sets default of par. 1-23, Motor Frequency, to 50 |
Hz, shows par. 1-20 in kW. |
|
[1] * |
US |
Sets default of par. 1-23, Motor Frequency, to 60 |
Hz, shows par. 1-20 in HP. |
|
|
||||
NB!
This parameter cannot be adjusted while motor runs.
0-04 Operating State at Power-up (Hand Mode)
Option: |
|
Function: |
|
|
This parameter controls whether or not the frequency converter should start running the motor when powering up |
|
|
after a power down in Hand mode. |
|
|
|
|
|
NB! |
|
|
If Keypad with potentiometer is mounted, reference is set according to actual potentiometer value. |
|
|
|
|
|
|
[0] |
Resume |
Frequency converter starts in same Hand or Off State as when powered off. |
|
|
Local reference is stored and used after power-up. |
|
|
|
[1] * |
Forced Stop, Ref=Old |
Frequency converter powers up in Off State meaning that motor is stopped after power up. |
|
|
Local reference is stored and used after power-up. |
|
|
|
[2] |
Forced Stop, Ref=0 |
Frequency converter powers up in Off State meaning that motor is stopped after power up. |
|
|
Local reference is set to 0. Thus motor will not start running before local reference has been increased. |
|
|
|
4.1.1. 0-1* Set-up Handling
User defined parameters and miscellaneous external inputs (eg. bus, Keypad, analog/digital inputs, feedback, etc.) controls the functionality of the frequency converter.
A complete set of all parameters controlling the frequency converter is called a set-up. The frequency converter contains 2 set-ups, Set-up1 and Set-up 2. Furthermore, a fixed set of factory settings can be copied into one or more set-ups.
Some of the advantages of having more than one set-up in the frequency converter are
•Run motor in one set-up (Active Set-up) while updating parameters in another set-up (Edit Set-up)
•Connect various motors (one at a time) to frequency converter. Motor data for various motors can be placed in different set-ups.
•Rapidly change settings of frequency converter and/or motor while motor is running (eg. ramp time or preset references) via bus or digital inputs.
The Active Set-up can be set as Multi Set-up where the active set-up is selected via input on a digital input terminal and/or via the bus control word.
NB!
FactorySet-up cannot be used as Active Set-up.
0-10 Active Set-up
Option: Function:
Active Set-up controls the motor.
Shifts between set-ups can only happen when
11

|
|
|
|
|
AF-60 LP™ Micro Drive Programming Guide |
|
|
|
|
|
• |
the motor is coasted |
|
|
|
|
|
OR |
|
|
|
|
|
|
• |
the set-ups between which the shift happens are linked to each other (see par. 0-12, Linked Set-ups). |
|
|
|
|
|
If changing between set-ups that are not linked, the change will not happen before motor is coasted. |
||
|
|
|
|
|
|
|
|
|
|
|
NB! |
|
|
|
|
|
|
The motor is only considered stopped when it is coasted. |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
[1 ] * |
Set-up 1 |
Set-up 1 is active. |
|
|
|
|
|
|
|
|
|
[2] |
Set-up 2 |
Set-up 2 is active. |
||||
|
|
|
|
|
||
4 |
|
[9] |
Multi Set-up |
Select the active set-up via digital input and/or bus, see par. 5-1* choice [23]. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
0-11 Edit Set-up |
|
|
|
|
|
|
|
|
|
||
|
|
Option: |
|
Function: |
||
|
|
|
|
The Edit Set-up is for updating parameters in the frequency converter from either Keypad or bus. It can be identical |
||
|
|
|
|
or different from the Active Set-up. |
||
|
|
|
|
All set-ups can be edited during operation, independently of the active set-up. |
||
|
|
|
|
|||
|
|
[1 ] * |
Set-up 1 |
Update parameters in Set-up 1. |
|
|
|
|
|
|
|
|
|
[2] |
Set-up 2 |
Update parameters in Set-up 2. |
||||
|
|
|
|
|||
|
|
[9] |
Active Set-up |
Update parameters in set-up selected as Active Set-up (see par. 0-10). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0-12 Link Set-ups |
|
|
|
|
|
|
Option: |
|
Function: |
||
|
|
|
|
The link ensures synchronizing of the “not changeable during operation” parameter values enabling shift from one |
||
|
|
|
|
set-up to another during operation. |
||
|
|
|
|
If the set-ups are not linked, a change between them is not possible while the motor is running. Thus the set-up change |
||
|
|
|
|
does not occur until the motor is coasted. |
||
|
|
|
|
|||
|
|
[0] |
Not linked |
Leaves parameters unchanged in both set-ups and cannot be changed while motor runs. |
|
|
|
|
|
|
|
|
|
[1 ] * |
Linked |
Copy parameters “not changeable during operation” parameter values into presently selected Edit Set-up. |
||||
|
|
|
|
NB! |
|
|
This parameter cannot be changed while motor runs.
4.1.2. 0-31 Custom Readout Min Scale
0-31 Custom Readout Min Scale
Range: |
Function: |
0.00 * [0.00 – 9999.00 ] |
It is possible to create a customized readout related to the output frequency of the unit. The value entered in par. 0-31 |
|
will be shown at 0 Hz. The readout can be shown in the LCP display when in Status Mode or it can be read in par. 16-09 |
4.1.3. 0-32 Custom Readout Max Scale
0-32 Custom Readout Max Scale
Range:
100.0* [0.00 – 9999.00]
Function:
It is possible to create a customized readout related to the output frequency of the unit. The value entered in par. 0-32 will be shown at the frequency programmed in par. 4-14 Motor Speed High Limit. The readout can be shown in the LCP display when in Status Mode or it can be read in par. 16-09
4.1.4. 0-4* Keypad
The frequency converter can operate in the following three modes: Hand, Off and Auto.
Hand: The frequency converter is locally operated and does not allow any remote control. By activating Hand a start signal is given.
OFF: The frequency converter stops with a normal stop ramp. When Off is chosen the frequency converter can only be started by pressing either Hand or Auto on the Keypad.
12

AF-60 LP™ Micro Drive Programming Guide
Auto: In Auto-mode the frequency converter can be remote controlled (bus/digital).
0-40 [Hand ] Key on Keypad
Option: |
|
Function: |
|
|
[0] |
Disabled |
Hand key has no function. |
|
|
|
|
|
|
|
[1 ] * |
Enabled |
Hand key is functional. |
|
|
|
|
|
||
|
|
|
||
0-41 [Off/Reset] Key on Keypad |
|
|
||
Option: |
|
Function: |
|
|
[0] |
Disable Off/Reset |
Off/reset key has no function. |
|
|
|
|
|||
|
|
|
|
4 |
[1 ] * |
Enable Off/Reset |
Stop signal and reset of any faults. |
|
|
|
|
|
||
[2] |
Enable Reset Only |
Reset only. Stop (Off) function is disabled. |
|
|
|
|
|||
|
|
|
|
|
0-42 [Auto ] Key on Keypad |
|
|
|
|
Option: |
|
Function: |
|
|
[0] |
Disabled |
Auto key has no function. |
|
|
|
|
|
|
|
[1 ] * |
Enabled |
Auto key is functional. |
|
|
|
|
|
|
|
4.1.5. 0-5* Copy/Save
0-50 Keypad Copy
Option: Function:
The detachable Keypad of the frequency converter can be used for storing setups, and thus for transferring data when moving parameter settings from one frequency converter to another.
|
|
NB! |
|
|
|
Keypad Copy can only be activated from the Keypad and ONLY when the motor is coasted. |
|
|
|
|
|
|
|
|
|
[1] |
All to Keypad |
Copy all setups from the frequency converter into the Keypad. |
|
|
|
|
|
[2] |
All from Keypad |
Copy all setups from Keypad to frequency converter. |
|
|
|
|
|
[3] |
Size indep. from Keypad |
Copy non motor size dependent data from Keypad to frequency converter |
|
|
|
|
|
|
|
|
|
0-51 Set-up Copy |
|
|
|
Option: |
|
Function: |
|
|
|
Use this function to copy a set-up content into the Edit Set-up. |
|
|
|
In order to be able to make a set-up copy ensure that |
|
|
|
• |
the motor is coasted |
|
|
• |
par. 0-10, Active Set-up, is set to either Set-up 1 [1] or Set-up 2 [2] |
|
|
|
|
|
|
NB! |
|
|
|
The keyboard/parameter database are blocked while Set-up Copy is running. |
|
|
|
|
|
|
|
|
|
[0 ] * |
No Copy |
Copy function is inactive |
|
|
|
|
|
[1]Copy from Set-up 1 Copy from Set-up 1 to edit set-up chosen in par. 0-11, Edit Set-up.
[2]Copy from Set-up 2 Copy from Set-up 2 to edit set-up chosen in par. 0-11, Edit Set-up.
[9]Copy from Factory SetCopy from Factory Settings to edit set-up chosen in par. 0-11, Edit set-up. up
4.1.6. 0-6* Password
0-60 (Main) Menu Password
Range: Function:
Use password for protection against unintended change of sensitive parameters, eg. motor parameters.
Password protected parameters can always be read, but cannot be edited without entering the password.
13
|
AF-60 LP™ Micro Drive Programming Guide |
|
|
|
|
0 * [0 - 999] |
Enter the password for access to Main Menu via the [Main Menu] key. Select the number that should allow for changing |
|
|
other parameter values. 0 means there is no password. |
|
|
|
|
NB!
Pressing buttons [MENU], [OK] and down will unlock the password. This will automatically enter the parameter editing screen in Quick Menu or Main Menu.
4
14

AF-60 LP™ Micro Drive Programming Guide
4.2. Parameter Group 1: Load/Motor
1-00 Configuration Mode
Option: |
|
Function: |
|
|
|
|
Use this parameter for selecting the application control principle to be used when a Remote Reference is active. |
|
|
|
|
|
|
|
|
|
NB! |
|
|
|
|
Changing this parameter will reset parameters 3-00, 3-02 and 3-03 to their default values. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
NB! |
|
|
|
|
This parameter cannot be adjusted while motor runs. |
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
||
[0 ] * |
Speed Open Loop |
For normal speed control (References). |
||
|
|
|
|
|
|
|
|
|
|
[3] |
Process Closed Loop |
Enables process closed loop control. See par. group 7-3* for further information on PI-controller. |
|
|
|
|
When running in process closed loop, par. 4-10 Motor Speed Direction must be set to Clockwise [0] |
|
|
|
|
|
|
|
1-01 Motor Control Principle |
|
|
|
|
Option: |
|
Function: |
|
|
[0] |
U/f |
Is used for parallel connected motors and/or special motor applications. The U/f settings are set in parameters 1-55 |
|
|
|
|
and 1-56. |
|
|
|
|
|
|
|
|
|
NB! |
|
|
|
|
When running U/f control slipand load compensations are not included. |
|
|
|
|
|
|
|
|
|
|
|
|
[1] * |
Advanced Vector Con- |
Normal running mode, including slipand load compensations. |
|
|
|
trol |
|
|
|
|
|
|
|
|
|
|
|
|
|
1-03 Torque Characteristics |
|
|
|
|
Option: |
|
Function: |
|
|
|
|
With more torque characteristics it is possible to run low energy consuming, as well as high torque applications. |
|
|
|
|
|
|
|
[0 ] * |
Constant Torque |
Motor shaft output provides constant torque under variable speed control. |
|
|
|
|
|
|
|
[2] |
Energy Savings |
This function automatically optimizes energy consumption in centrifugal pump and fan applications. See par. 14-41 |
|
|
|
|
Energy Savings Minimum Magnetisation. |
|
|
|
|
|
||
1-05 Hand Mode Configuration |
|
|
||
Option: |
|
Function: |
|
|
|
|
This parameter is only relevant when parameter 1-00 Configuration Mode is set to Process Closed Loop [3]. The pa- |
|
|
|
|
rameter is used for determining the reference or setpoint handling when changing from Auto Mode to Hand Mode on |
|
|
|
|
the Keypad. |
|
|
|
|
|
|
|
[0] |
Speed Open Loop |
In Hand Mode the drive always runs in Open Loop configuration regardless of setting in par. 1-00 Configuration |
|
|
|
|
Mode. Local potentiometer (if present) or Arrow up/down determines output frequency limited by Motor Speed High/ |
|
|
|
|
Low Limit (parameters 4-14 and 4-12). |
|
|
|
|
|
|
|
[2] * |
As configuration in par. |
If par. 1-00 Configuration Mode is set to Open Loop [1] function is as described above. |
|
|
|
1-00 |
If par. 1-00 is set to Process Closed Loop [3] changing from Auto mode to Hand mode results in a setpoint change via |
|
|
|
|
local potentiometer or Arrow up/down. The change is limited by Reference Max/Min (parameters 3-02 and 3-03). |
|
|
4.2.1. 1-2* Motor Data
Enter the correct motor nameplate data (power, voltage, frequency, current and speed).
Run Auto Tune, see par. 1-29.
Factory settings for advanced motor data, par. 1-3*, are automatically calculated.
NB!
Parameters in parameter group 1.2* cannot be adjusted while motor runs.
15
AF-60 LP™ Micro Drive Programming Guide
1-20 Motor Power [kW]/[HP] (Pm.n)
Option: Function:
Enter motor power from nameplate data.
Two sizes down, one size up from nominal AF-60 LP rating.
|
|
[1] |
0.09 kW/0.12 HP |
|
|
|
|
|
|
[2] |
0.12 kW/0.16 HP |
|
|
|
|
|
|
[3] |
0.18kW/0.25 HP |
|
|
|
|
|
|
[4] |
0.25 kW/0.33 HP |
|
|
|
|
|
|
[5] |
0.37kW/0.50 HP |
4 |
|
||
|
|
|
|
|
[6] |
0.55 kW/0.75 HP |
|
|
|
||
|
|
|
|
|
|
[7] |
0.75 kW/1.00 HP |
|
|
|
|
|
|
[8] |
1.10 kW/1.50 HP |
|
|
|
|
|
|
[9] |
1.50 kW/2.00 HP |
|
|
|
|
|
|
[10] |
2.20 kW/3.00 HP |
|
|
|
|
|
|
[11] |
3.00 kW/4.00 HP |
|
|
|
|
|
|
[12] |
3.70 kW/5.00 HP |
|
|
|
|
|
|
[13] |
4.00 kW/5.40 HP |
|
|
|
|
|
|
[14] |
5.50 kW/7.50 HP |
|
|
|
|
|
|
[15] |
7.50 kW/10.0 HP |
|
|
|
|
|
|
[16] |
11.00 kW/15.00 HP |
NB!
Changing this parameter affects par. 1-22 to 1-25, 1-30, 1-33 and 1-35.
1-22 Motor Voltage (U m.n)
Range: Function:
230/400 V [50 - 999 V] |
Enter motor voltage from nameplate data. |
1-23 Motor Frequency (f m.n)
Range: Function:
60 Hz* [20-400 Hz] |
Enter motor frequency from nameplate data. |
|
|
1-24 Motor Current (I m.n)
Range: Function:
M-type dependent* [0.01 - 26.00 A] |
Enter motor current from nameplate data. |
1-25 Motor Nominal Speed (n m.n)
Range: Function:
M-type Dependent* [100 - 9999 RPM] Enter motor nominal speed from nameplate data.
1-29 Auto Tune
Option: Function:
Use Auto Tune to optimize motor performance.
NB!
This parameter cannot be changed while motor runs.
1.Stop the frequency converter – make sure motor is at standstill
2.Choose [2] Enable Auto Tune
3.Apply start signal
– Via Keypad: Press Hand
16
AF-60 LP™ Micro Drive Programming Guide
|
|
- Or in Remote On mode: Apply start signal on terminal 18 |
|
|
|
[0] * |
Off |
Auto Tune function is disabled. |
|
|
|
[2] |
Enable Auto Tune |
Auto Tune function starts running. |
|
|
|
|
|
NB! |
|
|
To gain optimum tuning of frequency converter, run Auto Tune on a cold motor. |
|
|
|
4.2.2. 1-3* Adv. Motor Data
Adjust advanced motor data using one of these methods:
1. |
Run Auto Tune on cold motor. Frequency converter measures value from motor. |
4 |
2. |
Enter X1 value manually. Obtain value from motor supplier. |
|
|
|
|
3.Use Rs, X1, and X2default setting. Frequency converter establishes setting based on motor nameplate data.
NB!
These parameters cannot be changed while motor runs.
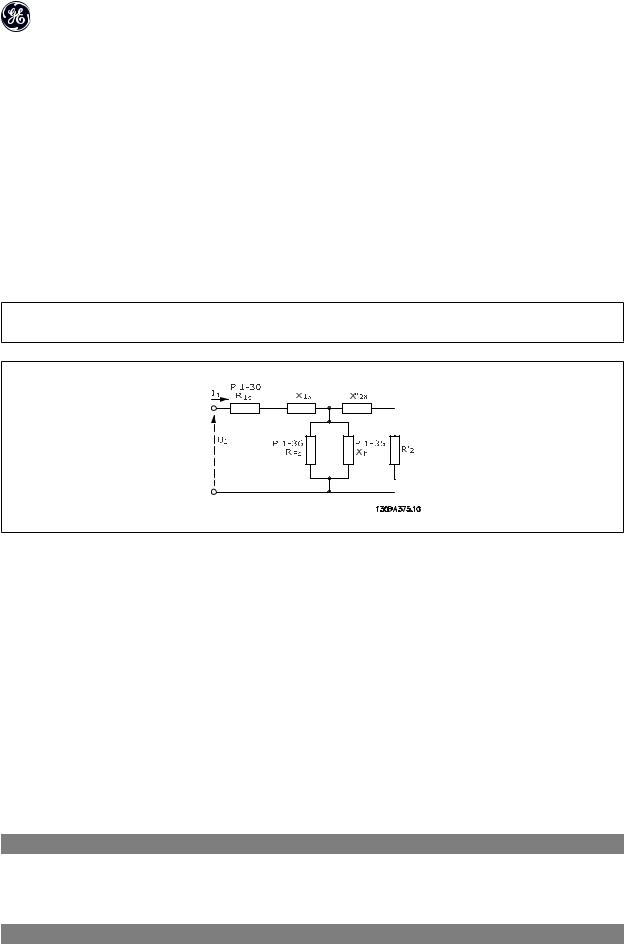
1-30 |
Stator Resistance (Rs) |
|
Range: |
Function: |
|
Depending on motor data* [Ohm] |
Set stator resistance value. |
|
|
|
|
1-33 |
Stator Leakage Reactance (X1) |
|
Range: |
Function: |
|
Depending on motor data* [Ohm] |
Set stator leakage reactance of motor. |
|
|
|
|
1-35 |
Main Reactance (X2) |
|
Range: |
Function: |
|
Depending on motor data* [Ohm] |
Set motor main reactance. |
|
4.2.3. 1-5* Load Independent Setting
This parameter group is for setting the load independent motor settings.
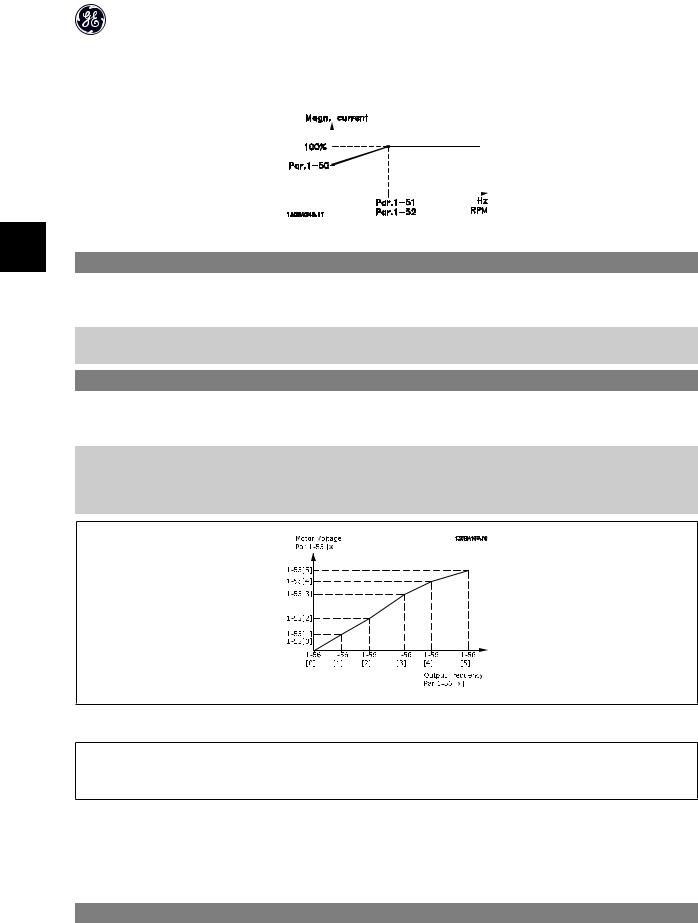
1-50 Motor Magnetization at Zero Speed
Range: |
Function: |
|
This parameter enables different thermal load on motor when running at low speed. |
|
|
100 %* [ 0 - 300%] |
Enter a percentage of rated magnetizing current. If setting is too low, motor shaft torque may be reduced. |
|
|
1-52 Min. Speed Normal Magnetizing [Hz]
Range: Function:
Use this parameter along with par. 1-50, Motor Magnetizing at Zero Speed.
17
|
|
AF-60 LP™ Micro Drive Programming Guide |
||
|
|
|
|
|
0.0 Hz* [0.0 - 10.0 Hz] |
Set frequency required for normal magnetizing current. If frequency is set lower than motor slip frequency, par. 1-50, |
|
||
|
Motor Magnetizing at Zero Speed is inactive. |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4
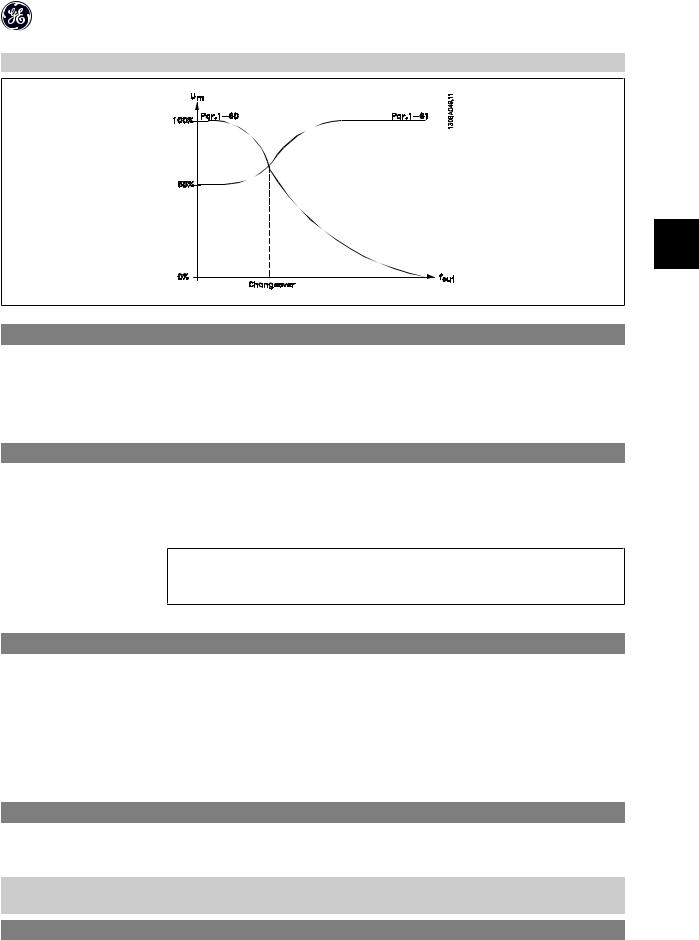
1-55 U/f Characteristic - U
Range:
0.0 V* [0.0 - 999.9 V]
Function:
This parameter is an array parameter [0-5] and is only functional when par. 1-01, Motor Control Principle is set to U/ f [0].
Enter voltage at each frequency point to manually form a U/f characteristic matching motor. Frequency points are defined in par. 1-56, U/f characteristics - F.
1-56 U/f Characteristic - F
Range:
0.0 Hz* [0.0 - 1000.0 Hz]
Function:
This parameter is an array parameter [0-5] and is only functional when par. 1-01, Motor Control Principle is set to U/f
[0].
Enter frequency points to manually form a U/f characteristic matching motor. Voltage at each point is defined in par. 1-55, U/f Characteristic - U.
Make a U/f characteristic based on 6 definable voltages and frequencies, see below figure.
Simplify U/f characteristics by merging 2 or more points (voltages and frequencies), respectively, are set equal.
Illustration 4.1: Fig. 1 U/f characteristics
NB!
For par. 1-56 the following applies [0] [1] [2] [3] [4] [5]
4.2.4. 1-6* Load Dependent setting
Parameters for adjusting the load dependent motor settings.
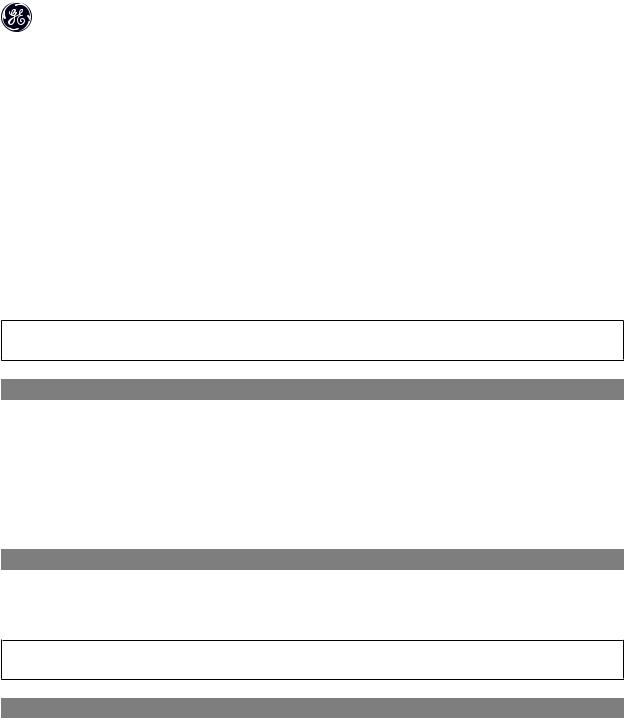
1-60 Low Speed Load Compensation
Range: |
Function: |
|
Use this parameter to gain optimum U/f characteristic when running at low speed. |
|
|
100 %* [0-199 %] |
Enter percentage in relation to load when motor runs at low speed. |
|
|
18
AF-60 LP™ Micro Drive Programming Guide
Change-over point is automatically calculated based on motor size.
4
1-61 High Speed Load Compensation
Range: |
Function: |
|
Use this parameter to obtain optimum load compensation when running at high speed. |
|
|
100 %* [0 - 199 %] |
Enter percentage to compensate in relation to load when motor runs at high speed. |
|
Change-over point is automatically calculated based on motor size. |
|
|
1-62 Slip Compensation
Range:
100 %* [-400 - 399 %]
Function:
Compensation for load dependent motor slip.
Slip compensation is calculated automatically based on rated motor speed, nM,N. Example: if par. 1-62 is set to 100% and the 4 pole 1800 RPM motor has an actual nameplate RPM of 1750 RPM, then 50 RPM is added to the output frequency by the drive.
NB!
This function is only active when par. 1-00, Configuration Mode, is set to Speed Open Loop [0], and when par. 1-01,
Motor Control Principle, is set to Advanced Vector Control [1].
1-63 Slip Compensation Time
Range: |
Function: |
0.10 s [0.05 - 5.00 s] |
Enter slip compensation reaction speed. A high value results in slow reaction whereas a low value results in quick |
|
reaction. |
|
If low-frequency resonance problems arise, use longer time setting. |
4.2.5. 1-7* Start Adjustments
Considering the need for various start functions in different applications, it is possible to select a number of functions in this parameter group.
1-71 Start Delay
Range:
0.0 s* [0.0 - 10.0 s]
Function:
The start delay defines the time to pass from a start command is given until the motor starts accelerating. Setting start delay to 0.0 sec. disables Start Function, [1-72], when start command is given.
Enter the time delay required before commencing acceleration.
Par. 1-72 Start Function is active during Start delay time .
1-72 Start Function
Option: Function:
[0] |
DC Hold/Delay Time |
Motor is energized with DC holding current (par. 2-00) during start delay time. |
19
|
|
|
|
AF-60 LP™ Micro Drive Programming Guide |
|
|
|
|
|
|
|
|
|
[1] |
DC Brake/Delay Time |
Motor is energized with DC braking current (par. 2-01) during start delay time. |
|
|
|
|
|
|
|
|
|
[2] * |
Coast/Delay Time |
Drive is coasted during start delay time ( Driveoff). |
|
|
|
|
|
|
|
|
|
1-73 Start Mode |
|
|
|
|
|
Option: |
|
Function: |
|
|
|
|
|
The Start Mode parameter is used to catch a spinning motor after eg. mains drop-out. |
|
|
|
|
|
|
|
|
|
|
|
This function is not suitable for hoisting applications. |
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
[0] * |
Disabled |
Catch a spinning load disabled. |
|
|
|
|
|
|
||
|
|
[1] |
Enabled |
Frequency converter enabled to catch spinning motor. |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
NB! |
|
|
|
|
|
When catch a spinning load is enabled par. 1-71, Start Delay, and par. 1-72, Start Function, have no function. |
|
|
|
|
|
|
|
4.2.6. 1-8* Stop Adjustments
To meet the need for various stop functions in different application these parameters offer some special stop features for the motor.
1-80 Function at Stop
Option: Function:
The selected function at stop is active in following situations:
• Stop command is given and output speed is ramped down to Min. Speed for Activating Functions at Stop.
• Start command is removed (standby), and output speed is ramped down to Min. Speed for Activating Functions at Stop.
• DC-brake command is given, and DC-brake time has passed
• While running and calculated output speed is below Min. Speed for Activating Functions at Stop.
[0] * |
Coast |
The drive is coasted. |
|
|
|
[1] |
DC hold |
The motor is energized with a DC current. See par. 2-00 DC Hold Current for more information. |
|
||
1-82 Min. Speed For Function at Stop [Hz] |
||
Range: |
|
Function: |
0.0 Hz* [0.0 - 20.0 Hz] |
Set the speed at which to activate par. 1-80 Function at Stop. |
|
4.2.7. 1-9* Motor Temperature
With an estimated motor temperature monitor the frequency converter is able to estimate motor temperature without having a thermistor mounted. It is thus possible to receive a warning or an alarm, if motor temperature exceeds upper operational limit.
1-90 Motor Thermal Protection
Option: |
|
Function: |
|
|
Using Electronic Overload the motor temperature is calculated based on frequency, speed and time. GE recommends |
|
|
using The Electronic Overload function, if a thermistor is not present. |
|
|
|
|
|
NB! |
|
|
Electronic Overload calculation is based on motor data from group 1-2*. |
|
|
|
|
|
|
[0] * |
No Protection |
Disables temperature monitoring. |
|
|
|
[1] |
Thermistor Warning |
A thermistor connected to either digital or analog input gives a warning if upper limit of motor temperature range is |
|
|
exceeded, (see par. 1-93, Thermistor Resource). |
|
|
|
[2] |
Thermistor Trip |
A thermistor connected to either digital or analog input gives an alarm and makes the frequency converter trip if upper |
|
|
limit of motor temperature range is exceeded, (see par. 1-93, Thermistor Resource. |
|
|
|
20

|
|
|
AF-60 LP™ Micro Drive Programming Guide |
|
[3] |
Electronic |
Overload |
If calculated upper limit of motor temperature range is exceeded, a warning occurs. |
|
|
Warning |
|
|
|
|
|
|
||
[4] |
Electronic Overload Trip |
If 90% of calculated upper limit of motor temperature range is exceeded, an alarm occurs and frequency converter |
|
|
|
|
|
trips. |
|
|
|
|
|
|
NB!
When the Electronic Overload function has been selected the drive will store the recorded temperature at power down and this temperature will resume at power up regardless of the elapsed time. Changing par. 1-90 back to [0] No Protection will reset the recorded temperature.
1-93 Thermistor Resource
Option: |
|
Function: |
|
4 |
|||
|
|
Select the thermistor input terminal. |
|
||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
[0] * |
None |
No thermistor is connected. |
|
|
|
|
|
|
|
|
|
|
|
|
|
[1] |
Analog Input 53 |
Connect thermistor to analog input terminal 53. |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
NB! |
|
|
|
|
|
|
|
Analog input 53 cannot be selected for other purposes when selected as thermistor resource. |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[6] |
Digital input 29 |
Connect thermistor to digital input terminal 29. |
|
|
|
||
|
|
While this input functions as thermistor input, it will not respond to the function chosen in par. 5-13, Digital Input 29. |
|
||||
|
|
The value of par. 5-13 remains however unchanged in parameter database while function is inactive. |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Input Digital/ |
Supply Voltage |
Threshold Cut-out |
|
|
|
|
|
Analog |
|
Values |
|
|
|
|
|
|
|
|
|
|
|
|
|
Digital |
10 V |
<800 ohm - >2.9k ohm |
|
|
|
|
|
Analog |
10 V |
<800 ohm - >2.9k ohm |
|
|
|
|
|
|
|
|
|
|
21
AF-60 LP™ Micro Drive Programming Guide
4.3. Parameter Group 2: Brakes
4.3.1.2-** Brakes
4.3.2.2-0* DC-Brake
The purpose of DC-brake function is to brake a rotating motor by applying DC-current to the motor.
|
|
2-00 DC Hold Current |
|
4 |
|
Range: |
Function: |
|
|
This parameter either holds the motor (holding torque) or pre-heats the motor. |
|
|
|
|
The parameter is active if DC Hold has been selected in either par. 1-72 Start Function or par. 1-80 Function at Stop. |
|
|
|
|
|
|
|
|
|
|
50%* [0 - 100%] |
Enter a value for holding current as a percentage of the rated motor current set in par. 1-24 Motor Current. 100% DC |
|
|
|
holding current corresponds to IM,N. |
|
|
|
|
NB!
Avoid 100% current too long as it may overheat the motor.
2-01 DC Brake Current
Range: |
Function: |
50 %* [0 - 150%] |
Set DC-current needed to brake rotating motor. |
|
Activate DC-brake in one of the four following ways: |
1. DC-brake command, see par. 5-1* choice [5] 2. DC Cut-in function, see par. 2-04
3. DC-brake selected as start function, see par. 1-72 4. DC-brake in connection with Flying Start, par. 1-73.
2-02 DC-Braking Time
Range: |
Function: |
|
DC-braking time defines the period during which DC-brake current is applied to the motor. |
|
|
10.0 s* [0.0 - 60 s] |
Set the time DC-braking current, set in par. 2-01, must be applied. |
|
|
NB!
If DC-brake is activated as start function, DC-brake time is defined by start delay time.
2-04 DC-Brake Cut-in Speed
Range:
0.0 Hz* [0.0 - 400.0 Hz]
Function:
Set DC-brake cut-in speed to activate DC braking current, set in par. 2-01, when ramping down. When set to 0 the function is off.
22

AF-60 LP™ Micro Drive Programming Guide
4.3.3. 2-1* Brake Energy Function
Use the parameters in this group for selecting dynamic braking parameters.
2-10 Brake Function
Option: |
|
|
Function: |
|
|
|
|
|
Resistor Brake: |
|
|
|
|
|
The resistor brake limits voltage in the intermediate circuit when the motor acts as generator. Without brake resis- |
|
|
|
|
|
tor, the frequency converter eventually trips. |
|
|
|
|
|
The resistor brake consumes surplus energy resulting from motor braking. A frequency converter with brake stops a |
|
|
|
|
|
|
||
|
|
|
motor faster than without a brake, which is used in many applications. Requires connection of external brake resistor. |
4 |
|
|
|
|
An alternative to the resistor brake is the AC brake. |
||
|
|
|
NB! |
|
|
|
|
|
|
|
|
|
|
|
Resistor brake is only functional in frequency converters with integrated dynamic brake. An external resistor must |
|
|
|
|
|
be connected. |
|
|
|
|
|
|
|
|
|
|
|
AC Brake: |
|
|
|
|
|
The AC brake consumes surplus energy by creating power loss in the motor. |
|
|
|
|
|
It is important to keep in mind that an increase in power loss causes motor temperature to rise. |
|
|
|
|
|
|
|
|
[0] * |
Off |
|
No brake function. |
|
|
|
|
|
|
|
|
[1] |
Resistor Brake |
|
Resistor brake is active. |
|
|
|
|
|
|
|
|
[2] |
AC Brake |
|
AC brake is active. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2-11 Brake Resistor (Ohm) |
|
|
|
|
|
Range: |
|
Function: |
|
||
5 ű* [5 - 5000 ű] |
Set brake resistor value. |
|
|||
|
|
|
|
|
|
2-16 AC Brake, Max Current |
|
|
|
|
|
Range: |
|
Function: |
|
||
100.0 %* [0.0 - 150.0 %] |
Enter max. permissible current for AC-braking to avoid overheating of motor. |
|
|||
|
|
100% equals motor current set in par. 1-24. |
|
||
|
|
|
|
|
|
2-17 Over-Voltage Control |
|
|
|
|
|
Option: |
|
|
Function: |
|
|
|
|
|
Use Over-voltage Control (OVC) to reduce the risk of the frequency converter tripping due to an over voltage on the |
|
|
|
|
|
DC link caused by generative power from the load. |
|
|
|
|
|
An over-voltage occurs eg. if the ramp down time is set too short compared to the actual load inertia. |
|
|
|
|
|
|
|
|
[0] * |
Disabled |
|
The OVC is not active/required. |
|
|
|
|
|
|
|
|
[1] |
Enabled, not at stop |
|
OVC is running unless a stop signal is active. |
|
|
|
|
|
|
|
|
[2] |
Enabled |
|
OVC is running, also when a stop signal is active. |
|
|
|
|
|
|
|
|
NB!
If Resistor Brake has been chosen in par. 2-10 Brake Function the OVC is not active even though enabled in this parameter.
4.3.4. 2-2* Mechanical Brake
For hoisting applications an electro-magnetic brake is required. The brake is controlled by a relay, which releases the brake when activated.
The brake activates if frequency converter trips or a coast command is given. Furthermore, it activates when motor speed is ramped down below the speed set in par. 2-22, Active Brake Speed.
23
AF-60 LP™ Micro Drive Programming Guide
2-20 Release Brake Current
Range:
0.00 A* [0.00 - 100 A]
Function:
Select motor current at which mechanical brake releases.
If start delay time has passed, and motor current is below Release brake current, frequency converter trips.
2-22 Activating Mechanical Brake
|
|
Range: |
Function: |
|
4 |
|
|||
|
|
If the motor is stopped using ramp, the mechanical brake is activated when motor speed is less than Active Brake |
||
|
|
Speed. |
|
|
|
|
|
|
|
|
|
|
Motor is ramped down to stop in the following situations: |
|
|
|
|
||
|
|
|
• |
A start command is removed (stand by) |
|
|
|
• |
A stop command is activated |
|
|
|
• |
Quick-stop is activated (Q-stop ramp is used) |
|
|
|
|
|
|
|
0 Hz* [0 - 400 Hz] |
Select motor speed at which mechanical brake activates when ramping down. |
|
|
|
|
Mechanical brake automatically activates if frequency converter trips or reports an alarm. |
|
|
|
|
|
|
24
AF-60 LP™ Micro Drive Programming Guide
4.4. Parameter Group 3: Reference/Ramps
4.4.1. 3-** Reference/Ramps
Parameters for reference handling, definition of limitations, and configuration of the frequency converter's reaction to changes
4.4.2. 3-0* Reference Limits
Parameters for setting the reference unit, limits and ranges.
|
|
|
|
4 |
3-00 Reference Range |
|
|||
|
|
|
||
Option: |
|
Function: |
|
|
|
|
|||
|
|
Select the range of reference and feedback signals. Values can be both positive and negative, unless par. 1-00, |
||
|
|
Configuration Mode, is set to Process Closed Loop [3]. In that case only positive values are allowed. |
||
|
|
|
|
|
[0] * |
Min - Max |
Reference setpoint ranges can have positive values only. |
|
|
|
|
Select this if running in Process Closed Loop. |
|
|
|
|
|
|
|
[1] |
-Max - +Max |
Ranges can have both positive and negative values. |
||
3-02 Minimum Reference
Range:
0.00* [-4999 - 4999]
Function:
Enter value for minimum reference.
The sum of all internal and external references are clamped (limited) to the minimum reference value, par. 3-02.
3-03 Maximum Reference
Range:
50.00* [-4999 - 4999]
4.4.3. 3-1* References
Function:
Maximum Reference is adjustable in the range Minimum Reference - 4999.
Enter value for Maximum Reference.
The sum of all internal and external references are clamped (limited) to the maximum reference value, par. 3-03.
Parameters for setting up the reference sources. Select the preset references for the corresponding digital inputs in parameter group 5.1*, Digital Inputs.
3-10* Preset Reference
Option: |
Function: |
|
|
|
|
|
||
|
Each parameter set-up contains 8 preset references which are selectable via 3 digital inputs or bus. |
|
||||||
|
|
|
|
|
|
|
|
|
|
[18] |
[17] |
[16] |
|
Preset reference no. |
|
||
|
|
|
||||||
|
|
|
Bit2 |
Bit1 |
Bit0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
1 |
1 |
|
|||
|
|
|
|
|
|
|||
|
|
0 |
1 |
0 |
|
2 |
|
|
|
0 |
1 |
1 |
3 |
|
|||
|
|
|
|
|
|
|||
|
|
1 |
0 |
0 |
|
4 |
|
|
|
1 |
0 |
1 |
5 |
|
|||
|
|
|
|
|
|
|||
|
|
1 |
1 |
0 |
|
6 |
|
|
|
1 |
1 |
1 |
7 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
Table 4.1: Par. 5-1* selection [16], [17] and [18] |
|
|
|
[0.00] * |
-100.00 - 100.00% |
Enter the different preset references using array programming. |
|
|
Normally, 100% = value set in par. 3-03, Maximum Reference. |
|
|
However, there are exceptions if par. 3-00 is set to Min - Max, [0]. |
|
|
Example 1: |
|
|
|
25
 Loading...
Loading...