


 Loading...
Loading...
User Instructions - Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
|
USER INSTRUCTIONS |
|
|
Installation |
|
Logix ® 420 |
Operation |
|
Maintenance |
||
Digital Positioner |
||
Safety Manual |
||
FCD LGENIM0106-0612/13 |
||
|
||
|
|

User Instructions - Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
CONTENTS
Quick Start Instructions 15
1 |
GENERAL INFORMATION ................................. |
3 |
1.1 |
USING THIS DOCUMENT............................................................ |
3 |
1.2 |
TERMS CONCERNING SAFETY ...................................................... |
3 |
1.3 |
PROTECTIVE CLOTHING ............................................................. |
3 |
1.4 |
QUALIFIED PERSONNEL ............................................................. |
3 |
1.5 |
VALVE AND ACTUATOR VARIATIONS............................................. |
3 |
1.6 |
SPARE PARTS ......................................................................... |
3 |
1.7 |
SERVICE / REPAIR.................................................................... |
3 |
1.8 |
BASIC OPERATION ................................................................... |
4 |
1.9 |
HART.................................................................................. |
4 |
1.10 |
POSITION DEFINITION............................................................... |
4 |
1.11 |
COMMAND INPUT AND FINAL COMMAND...................................... |
4 |
1.12 |
OUTER LOOP.......................................................................... |
5 |
1.13 |
INNER LOOP........................................................................... |
5 |
1.14 |
DETAILED SEQUENCE OF POSITIONER OPERATIONS ........................... |
5 |
1.15 |
INNER LOOP OFFSET................................................................. |
5 |
2 |
SPECIFICATIONS ............................................... |
6 |
2.1 |
INPUT SIGNAL ........................................................................ |
6 |
2.2 |
AIR SUPPLY ........................................................................... |
6 |
2.3 |
PHYSICAL SPECIFICATIONS.......................................................... |
6 |
2.4 |
PNEUMATIC OUTPUT................................................................ |
6 |
2.5 |
STROKE OUTPUT ..................................................................... |
6 |
2.6 |
TEMPERATURE........................................................................ |
6 |
2.7 |
POSITIONER PERFORMANCE CHARACTERISTICS ................................ |
6 |
2.8 |
VALVESIGHT DTM SOFTWARE SPECIFICATIONS............................... |
6 |
3 |
HAZARDOUS AREA CERTIFICATIONS............ |
7 |
4 |
STORAGE AND UNPACKING............................ |
8 |
4.1 |
STORAGE .............................................................................. |
8 |
4.2 |
UNPACKING ........................................................................... |
8 |
4.3 |
PRE-INSTALLATION INSPECTION................................................... |
8 |
5 |
MOUNTING AND INSTALLATION ..................... |
9 |
5.1 |
DIRECT MOUNTING TO VALTEK GS AND FLOWTOP .......................... |
9 |
5.2 |
MOUNTING TO NAMUR VALVES ............................................. |
10 |
6 |
TUBING ............................................................. |
11 |
6.1 |
DETERMINE AIR ACTION ......................................................... |
11 |
6.2 |
CONNECT SUPPLY PORT .......................................................... |
11 |
6.3 |
VENTED DESIGN.................................................................... |
11 |
6.4 |
PURGING ............................................................................ |
11 |
7 |
ELECTRICAL CONNECTIONS......................... |
12 |
7.1 |
ELECTRICAL TERMINALS........................................................... |
12 |
7.2 |
COMMAND INPUT (4-20 MA) CONNECTION ................................ |
12 |
7.3 |
CONNECTIONS FOR INTRINSICALLY SAFE OPERATION ....................... |
14 |
8 |
STARTUP .......................................................... |
15 |
8.1 |
QUICK START INSTRUCTIONS .................................................... |
15 |
8.2 |
LOCAL USER INTERFACE OVERVIEW ............................................ |
15 |
8.3 |
CONFIGURATION SWITCH SETTINGS............................................ |
15 |
8.4 |
STROKE CALIBRATION ............................................................. |
16 |
9 |
POSITIONER FUNCTIONS (NO DISPLAY |
|
|
REQUIRED) ....................................................... |
18 |
9.1 |
LIVE MANUAL TUNING (ADJUSTING THE GAIN) ............................. |
18 |
9.2 |
LOCAL CONTROL OF VALVE POSITION ......................................... |
18 |
9.3 |
COMMAND SOURCE RESET ...................................................... |
18 |
9.4 |
FACTORY RESET .................................................................... |
18 |
9.5 |
VIEWING VERSION NUMBERS ................................................... |
19 |
10 POSITIONER FUNCTIONS (LCD DISPLAY).... |
19 |
|
10.1 |
MAIN DISPLAY VIEW.............................................................. |
19 |
10.2 |
MENU OVERVIEW ................................................................. |
21 |
10.3 |
MENU FEATURES .................................................................. |
22 |
11 |
HART COMMUNICATION ................................. |
27 |
11.1 |
VALVESIGHT DTM ................................................................ |
27 |
11.2 |
HART 475 HANDHELD COMMUNICATOR.................................... |
27 |
11.3 |
BURST MODE....................................................................... |
27 |
11.4 |
CHANGING HART VERSIONS.................................................... |
27 |
12 REQUIREMENTS FOR SAFETY INTEGRITY .. |
28 |
|
12.1 |
FAIL SAFE STATE ................................................................... |
28 |
12.2 |
SAFETY FUNCTION ................................................................. |
28 |
12.3 |
FAIL SAFE STATE RESPONSE TIME .............................................. |
28 |
12.4 |
INSTALLATION ...................................................................... |
28 |
12.5 |
REQUIRED CONFIGURATION SETTINGS......................................... |
28 |
12.6 |
MAXIMUM ACHIEVABLE SIL..................................................... |
28 |
12.7 |
RELIABILITY DATA .................................................................. |
28 |
12.8 |
LIFETIME LIMITS .................................................................... |
28 |
12.9 |
PROOF TESTING .................................................................... |
29 |
12.10 |
MAINTENANCE ..................................................................... |
29 |
12.11 |
REPAIR AND REPLACEMENT ...................................................... |
29 |
12.12 |
TRAINING REQUIREMENTS ....................................................... |
29 |
13 |
MAINTENANCE AND REPAIR ......................... |
30 |
13.1 |
SCHEDULED MAINTAINANCE .................................................... |
30 |
13.2 |
REQUIRED TOOLS AND EQUIPMENT ............................................ |
30 |
13.3 |
REPLACING A MAIN BOARD ..................................................... |
30 |
14 |
TROUBLESHOOTING ....................................... |
31 |
14.1 |
TROUBLESHOOTING GUIDE ...................................................... |
31 |
14.2 |
STATUS CODE INDEX .............................................................. |
32 |
14.3 |
STATUS CODE DESCRIPTIONS .................................................... |
33 |
14.4 |
HELP FROM FLOWSERVE ......................................................... |
39 |
15 |
POSITIONER DIMENSIONS.............................. |
40 |
15.1 |
POSITIONER DIMENSIONS ........................................................ |
40 |
16 |
HOW TO ORDER............................................... |
41 |
16.1 |
POSITIONERS........................................................................ |
41 |
16.2 |
SPARE PARTS KITS ................................................................. |
41 |
16.3 |
MOUNTING KITS ................................................................... |
41 |
INDEX........................................................................... |
42 |
|
flowserve.com |
2 |
User Instructions - Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
1 GENERAL INFORMATION
1.1 Using This Document
Product users and maintenance personnel should thoroughly review this manual prior to installing, operating, or performing any maintenance on the positioner.
The following instructions are designed to assist in unpacking, installing and performing maintenance as required on Logix® 420 positioners. .
Separate Flow Control Products User Instructions cover the valve, actuator, or portions of the system and other accessories. Refer to the appropriate instructions when this information is needed. In most cases FLOWSERVE valves, actuators and accessories are designed for specific applications with regard to medium, pressure and temperature. For this reason they should not be used in other applications without first contacting the manufacturer.
To avoid possible injury to personnel or damage to positioner parts, DANGER and CAUTION notes must be strictly followed. Modifying this product, substituting non-factory parts or using maintenance procedures other than outlined could drastically affect performance and be hazardous to personnel and equipment, and may void existing warranties.
1.2 Terms Concerning Safety
The safety terms DANGER, CAUTION and NOTE are used in these instructions to highlight particular dangers and/or to provide additional information on aspects that may not be readily apparent.
NOTE: Indicates and provides additional technical information, which may not be very obvious even to qualified personnel.
 CAUTION: Indicates that minor personal injury and/or property damage can occur if proper precautions are not taken.
CAUTION: Indicates that minor personal injury and/or property damage can occur if proper precautions are not taken.
DANGER: Indicates that death, severe personal injury and/or substantial property damage can occur if proper precautions are not taken.
Compliance with other, not particularly emphasized notes, with regard to assembly, operation and maintenance and technical documentation (e.g., in the operating instruction, product documentation or on the product itself) is essential in order to avoid faults, which in themselves might directly or indirectly cause severe personal injury or property damage.
FLOWSERVE positioners use high pressure gas to operate. Use eye protection when working around pressurized equipment. Follow proper procedures for working with natural gas if it is used.
DANGER: Standard industry safety practices must be adhered to when working on this or any process control product. Specifically, personal protective equipment must be used as warranted.
1.4 Qualified Personnel
Qualified personnel are people who, on account of their training, experience, instruction and their knowledge of relevant standards, specifications, accident prevention regulations and operating conditions, have been authorized by those responsible for the safety of the plant to perform the necessary work and who can recognize and avoid possible dangers.
In unpacking, installing and performing maintenance as required on FLOWSERVE products, product users and maintenance personnel should thoroughly review this manual prior to installing, operating or performing any maintenance.
1.5 Valve and Actuator Variations
These instructions cannot claim to cover all details of all possible product variations, nor can they provide information for every possible example of installation, operation or maintenance. This means that the instructions normally include only the directions to be followed by qualified personal where the product is being used for its defined purpose. If there are any uncertainties in this respect particularly in the event of missing product-related information, clarification must be obtained via the appropriate Flowserve sales office.
1.6 Spare Parts
Use only FLOWSERVE original spare parts. FLOWSERVE cannot accept responsibility for any damages that occur from using spare parts or fastening materials from other manufactures. If FLOWSERVE products (especially sealing materials) have been in storage for longer periods check these for corrosion or deterioration before using these products. See section 4 STORAGE AND UNPACKING more information.
1.7 Service / Repair
To avoid possible injury to personnel or damage to products, safety terms must be strictly adhered to. Modifying this product, substituting non-factory parts, or using maintenance procedures other than outlined in this instruction could drastically affect performance and be hazardous to personnel and equipment, and may void existing warranties.
1.3 Protective Clothing
Between actuator and valve there are moving parts. To avoid injury FLOWSERVE provides pinch-point-protection in the
flowserve.com |
3 |
User Instructions - Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
form of cover plates, especially where side-mounted positioners are fitted. If these plates are removed for inspection, service or repair special attention is required. After completing work the cover plates must be refitted.
Logix 420 positioner repair is limited to the replacement of sub-assemblies and circuit boards with FLOWSERVEmanufactured replacements as outlined in this manual.
DANGER: Substitution of with non-factory positioner components may impair intrinsic safety.
 CAUTION: Before products are returned to FLOWSERVE for repair or service, FLOWSERVE must be provided with a certificate which confirms that the product has been decontaminated and is clean. FLOWSERVE will not accept deliveries if a certificate has not been provided (a form can be obtained from FLOWSERVE).
CAUTION: Before products are returned to FLOWSERVE for repair or service, FLOWSERVE must be provided with a certificate which confirms that the product has been decontaminated and is clean. FLOWSERVE will not accept deliveries if a certificate has not been provided (a form can be obtained from FLOWSERVE).
Apart from the operating instructions and the obligatory accident prevention directives valid in the country of use, all recognized regulations for safety and good engineering practices must be followed.
PRINCIPLES OF OPERATION
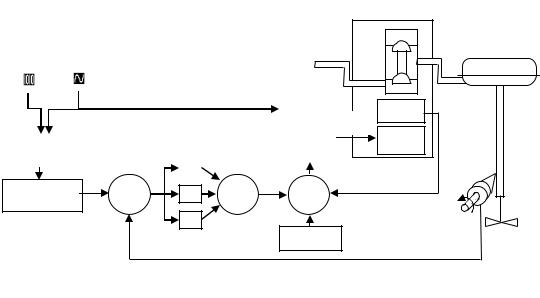
1.8 Basic Operation
The Logix 420 digital positioner is a two-wire 4-20 mA input digital valve positioner which uses the HART protocol to allow two-way remote communications. The positioner is completely powered by the 4-20 mA input signal. Start-up current must be at least 3.8 mA. The positioner is configurable through the local user interface, hand-held or DTM. The Logix 420 positioner can control single-acting pneumatic actuators with linear or rotary mountings.
The Logix 420 digital positioner is an electronic and pneumatic closed-loop feedback instrument. Figure 1 shows a schematic of a Logix 420 positioner installed on a singleacting linear actuator for air-to-open action.
1.9 HART
The Logix 420 receives power from the two-wire, 4-20 mA input signal. However, since this positioner utilizes HART communications, two sources can be used for the command signal: Analog and Digital. In Analog source, the 4-20 mA signal is used for the command source. In Digital source, the level of the input 4-20 mA signal is ignored (used only for power) and a digital signal, sent via the HART communication protocol, is used as the command source. The command source can be accessed with ValveSight software, the HART 375 communicator, or other host software. See section 11 HART COMMUNICATION HART COMMUNICATION for more information.
1.10 Position Definition
Whether in Analog or Digital Source, The position at 0% is always defined as the valve in a closed position and 100% is always defined as the valve in an open position. In Analog Source, the 4-20 mA signal is converted to a position (in percent). During loop calibration, the signals corresponding to 0% and 100% are defined.
1.11 Command Input and Final Command
The Command Input signal (in percent) passes through a characterization/limits modifier block. This function is done in software, which allows for in-the-field customer adjustment. The characterization block can apply no adjustment (Linear),
Single Acting
Pilot Relay
Digital |
|
Analog |
|
|
|
|
|
|
|
|
|
|
Command |
|
|
|
|
|
|
|
|
||
Command |
|
|
|
|
|
|
|
|
|
||
|
|
Input |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4-20 mA) |
|
|
|
|
Air Supply |
||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Piezo Kill |
|
|
|
|
|
|
|
|
|
|
|
Circuit |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Inner |
|
Command |
|
|
|
|
|
|
|
|
Loop |
|
|
|
|
|
|
|
|
|
|
|
|
||
Input |
|
|
|
|
|
|
|
|
Spool |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
P |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Poppet |
|
Valve |
Actuator |
|
Hall |
Piezo |
|
Voltage |
|
|
Piezo |
|
Valve |
Characterization, |
|
|
|
|
+ |
|
|
|
|
|
+ |
Σ |
I |
+ |
Σ |
|
Σ |
_ |
|
|
|
|
+ |
|
|
|||||||
Soft Limits, |
|
Inner-Loop |
|
|||||||
|
_ |
|
|
+ |
Output |
|
|
|
||
|
|
|
|
|
|
Output |
|
|||
|
|
|
|
|
|
Percentage |
|
|
|
|
|
Final |
|
D |
|
|
|
|
|
|
|
|
Command |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Inner-Loop |
|
Control |
||
|
|
|
|
|
|
|
Offset |
|
Position |
Valve |
|
|
|
|
|
|
|
|
|
Feedback |
|
|
Figure 1: Principles of Operation of Logix 420 |
|
one of several pre-defined characterization curve |
flowserve.com |
4 |
User Instructions - Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
adjustments (including several Equal Percent), or a 21-point Custom Characterization curve adjustment. In Linear mode, the input signal is passed straight through to the control algorithm in a 1:1 transfer. In Equal Percent (=%) mode, the input signal is mapped to a standard rangeability equal percent curve. If Custom Characterization is enabled, the input signal is mapped to a custom, user-defined 21-point output curve. The custom user-defined 21-point output curve is defined using a handheld or ValveSight software. In addition, two user-defined features, Soft Limits and Tight Shutoff may affect the position. The actual command being used to position the stem after the evaluation of characterization curves and user limits, is called the Final Command.
1.12 Outer Loop
The Logix 420 uses a two-stage, stem-positioning algorithm. The two stages consist of an inner-loop (pilot relay control) and an outer-loop (stem position control). Referring again to Figure 1, a stem position sensor provides a measurement of the stem movement. The Final Command is compared against the Stem Position. If any deviation exists, the control algorithm sends a signal to the inner-loop control to move the relay in a direction, depending upon the deviation. The innerloop then quickly adjusts the spool position. The actuator pressures change and the stem begins to move. The stem movement reduces the deviation between Final Command and Stem Position. This process continues until the deviation goes to zero.
1.13 Inner Loop
The inner-loop controls the position of the relay valve by meansVentof a driver module. The driver module consists of a temperature-compensated hall-effect sensor and a Piezo valve pressure modulator. The Piezo valve pressure modulator controls the air pressure under a diaphragm by means of a Piezo beam bender. The Piezo beam deflects in response to an applied voltage from the inner-loop electronics. As the voltage to the Piezo valve increases, the Piezo beam bends, closing off against a nozzle causing the pressure under the diaphragm to increase. As the pressure under the diaphragm increases or decreases, the poppet valve moves up or down respectively. The Hall effect sensor transmits the position of the poppet back to the inner-loop electronics for control purposes.
1.14Detailed Sequence of Positioner Operations
A more detailed example explains the control function. Assume the unit is configured as follows:
Unit is in Analog command source.
Custom characterization is disabled (therefore characterization is Linear).
No soft limits enabled. No tight shutoff (MPC) set.
Valve has zero deviation with a present input signal of 12 mA.
Loop calibration: 4 mA = 0% command, 20 mA = 100% command.
Actuator is tubed and positioner is configured air-to- open.
Given these conditions, 12 mA represents a Command source of 50 percent. Custom characterization is disabled so the command source is passed 1:1 to the Final Command. Since zero deviation exists, the stem position is also at 50 percent. With the stem at the desired position, the poppet valve will be at a middle position that balances the pressures and spring force in the actuator. This is commonly called the null or balanced poppet position.
Assume the input signal changes from 12 mA to 16 mA. The positioner sees this as a command source of 75 percent. With Linear characterization, the Final Command becomes 75 percent. Deviation is the difference between Final Command and Stem Position: Deviation = 75% - 50% = +25%, where 50 percent is the present stem position. With this positive deviation, the control algorithm sends a signal to move the poppet up from its present position. As the poppet moves, the supply air is applied to the bottom of the actuator. This new pressure differential causes the stem to start moving towards the desired position of 75 percent. As the stem moves, the Deviation begins to decrease. The control algorithm begins to reduce the poppet opening. This process continues until the Deviation goes to zero. At this point, the poppet will be back in its null or balanced position. Stem movement will stop and the desired stem position is now achieved.
1.15 Inner Loop Offset
The position of the poppet at which the pressure and springs are balanced, holding the valve position in a steady state, is called the Inner Loop Offset. The controlling algorithm uses this value as a reference in determining the Piezo voltage. This parameter is important for proper control and is optimized and set automatically during stroke calibration.
flowserve.com |
5 |
User Instructions - Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
2 |
SPECIFICATIONS |
|
||
2.1 |
Input Signal |
|
|
|
Table 1: Input Signal |
|
|
|
|
Power Supply |
|
Two-wire, 4-20 mA |
|
|
|
|
|
10.0 VDC terminal voltage |
|
|
|
|
|
|
Input Signal Range |
|
4 - 20 mA (HART) |
|
|
|
|
|
|
|
Compliance Voltage |
|
10.0 VDC @ 20 mA |
|
|
|
|
|
|
|
Effective Resistance |
|
500 Ω @ 20 mA Typical |
|
|
|
|
|
|
|
Minimum Required Operating |
3.8 mA |
|
||
Current |
|
|
|
|
|
|
|
|
|
Signal Interrupt Without Restart |
80 ms |
|
||
Time (after powering positioner |
|
|
||
for at least one minute) |
|
|
|
|
|
|
|
|
|
Maximum Shut-down Current |
3.6 mA |
|
||
|
|
|
|
|
Communications |
|
HART protocol |
|
|
|
|
|
|
|
|
|
|
|
|
2.2 |
Air Supply |
|
|
|
Table 2: Air Supply |
|
|
|
|
Minimum Input Pressure |
1.5 Bar (22 PSI) |
|
||
|
|
|
||
Maximum Input Pressure |
Single Acting Relay – 6 Bar (87 PSI) |
|
||
|
|
|
||
Air Supply Quality |
The air supply must be free from |
|
||
|
|
moisture, oil and dust by conforming to |
|
|
|
|
the ISA 7.0.01 standard. (A dew point |
|
|
|
|
at least 18 degrees Fahrenheit below |
|
|
|
|
ambient temperature, particle size |
|
|
|
|
below five microns—one micron |
|
|
|
|
recommended—and oil content not to |
|
|
|
|
exceed one part per million). |
|
|
|
|
|
||
Operating Humidity |
0 - 100% non-condensing |
|
||
|
|
|
||
Acceptable Supply |
Air, sweet natural gas, nitrogen and |
|
||
Gasses |
CO2 are acceptable supply gasses. |
|
||
|
|
Sour natural gas is not acceptable. |
|
|
|
|
|
||
Air Consumption |
0.069 Nm³/h @ 1.5 bar |
|
||
|
|
(0.041 SCFM @ 22 PSI) |
|
|
|
|
0.082 Nm³/h @ 4.1 bar |
|
|
|
|
(0.050 SCFM @ 60 PSI) |
|
|
|
|
|
|
|
2.3 Physical Specifications
Table 3: Physical Specifications
For dimensions, see section 15 POSITIONER .
Housing Material |
Cast, powder-painted aluminum |
|
EN AC-AlSi12(Fe) |
|
|
Soft Goods |
Fluorosilicone |
Weight of Base Positioner With LCD and Glass Cover Without Accessories 2.70 kg (5.95 lb)
With Solid Cover
3.11 kg (6.85 lb)
2.4 Pneumatic Output
Table 4: Pneumatic Output
Output Pressure |
0 to 100% of air supply pressure. |
Range |
|
|
|
Output Air Capacity |
Single Acting Relay – |
|
9.06 Nm³/h @ 1.5 bar |
|
(5.33 SCFM @ 22 PSI) |
|
20.8 Nm³/h @ 4.1 bar |
|
(12.2 SCFM @ 60 PSI) |
|
|
2.5 Stroke Output
Table 5: Stroke Output
Feedback shaft |
Min 15°, Max 90° |
|
Rotation |
45° recommended for linear applications. |
|
|
|
|
|
|
|
2.6 Temperature
Table 6: Temperature
Operating |
-52 to 85°C (-61.6 to 185°F) |
|
Temperature Range* |
|
|
Transport and Storage -52 to 85°C (-61.6 to 185°F)
Range
*Reduced performance at low temperatures.
2.7 Positioner Performance Characteristics
Table 7: Performance Characteristics
Better than or equal to the following values on a 25 square inch Mark I actuator per standard ISA 75.13.
Resolution |
0.25% |
|
|
Linearity |
+/-1.25% |
|
|
Repeatability |
0.25% |
|
|
Hysteresis |
1.0% |
|
|
Deadband |
0.3% |
Sensitivity |
0.25% |
|
|
Stability |
0.4% |
|
|
Long term drift |
0.5% |
|
|
Supply Pressure Effect |
0.2% |
|
|
2.8 ValveSight DTM Software Specifications
Table 8: ValveSight DTM Software Specifications
Computer |
Minimum Pentium processor running |
|
Windows 95, 98, NT, 2000, XP, 32 MB total |
|
memory (64 MB recommended), 30 MB |
|
available hard disk space, CD-ROM drive |
|
|
Ports |
1 minimum available with 8 maximum |
|
possible. (Can also communicate via serial, |
|
PCMCIA and USB connections) |
|
|
HART Modem |
RS-232, PCMCIA card, or USB |
HART Filter |
May be required in conjunction with some |
|
DCS hardware. |
|
|
HART MUX |
MTL 4840/ELCON 2700 |
|
|
flowserve.com |
6 |
User Instructions - Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
3 HAZARDOUS AREA CERTIFICATIONS
 Table 9: Logix 420 Hazardous Locations Information
Table 9: Logix 420 Hazardous Locations Information
|
|
|
|
ATEX |
|
|
|
|
North America (cFMus) |
|
|
Explosion Proof/Flame Proof |
|
Explosion Proof |
|
|
|||||
|
FM13ATEX0097X |
|
|
|
Class I, Div 1, Groups B,C,D |
|||||
|
II 2 G |
|
|
|
Class I, Zone 1, AEx d IIB+H2 T4/T6 (US) |
|||||
|
Ex d IIB+H2 Gb T4/T6 |
|
Class 1, Zone 1, Ex d IIB +H2 T4/T6 (Canada) |
|||||||
|
T4 Tamb = -52˚C ≤ Ta ≤ +85˚C |
|
T4 Tamb = -52˚C ≤ Ta ≤ +85˚C |
|||||||
|
T6 Tamb = -52˚C ≤ Ta ≤ +45˚C |
|
T6 Tamb = -52˚C ≤ Ta ≤ +45˚C |
|||||||
|
IP 66 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Intrinsically Safe |
|
|
||
|
Intrinsically Safe |
|
|
|
Class I, Div 1, Groups A,B,C,D |
|||||
|
FM12ATEX0009X |
|
|
|
Class I, Zone 0, AExia IIC (US) |
|||||
|
II 1 G |
|
|
|
Class I, Zone 0, Ex ia IIC (Canada) |
|||||
|
Ex ia IIC Ga T4/T6 |
|
T4 Tamb = -20˚C ≤ Ta ≤ +85˚C |
|||||||
|
T4 Tamb = -20˚C ≤ Ta ≤ +85˚C |
|
T6 Tamb = -52˚C ≤ Ta ≤ +45˚C |
|||||||
|
T6 Tamb = -52˚C ≤ Ta ≤ +45˚C |
|
Type 4X |
|
|
|||||
|
IP 66 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Entity |
|
4-20 |
|
|
|
|
|
|
|
|
|
|
||
|
Entity |
|
4-20 |
|
|
|
Parameters |
|
Input |
|
|
Parameters |
|
Input |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ui (Vdc)= |
|
30 |
|
|
Ui (Vdc)= |
|
30 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Ii (mA)= |
|
100 |
|
||
|
|
|
|
|
|
|
|
|
||
|
Ii (mA)= |
|
100 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Pi (mW)= |
|
800 |
|
||
|
|
|
|
|
|
|
|
|
||
|
Pi (mW)= |
|
800 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Ci (nF)= |
|
0 |
|
||
|
|
|
|
|
|
|
|
|
||
|
Ci (nF)= |
|
0 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Li (µH)= |
|
47 |
|
||
|
|
|
|
|
|
|
|
|
||
|
Li (µH)= |
|
47 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Note: Reference installation drawing # 291780 |
||||||
|
|
|
|
|
|
|||||
|
Note: Reference installation drawing # 291780 |
|
|
|
|
|
|
|||
|
|
|
|
IECEx |
|
Warning! |
|
|
||
|
Explosion Proof/Flame Proof |
|
|
Covers must be properly installed in order to maintain |
||||||
|
FMG 13.0038X |
|
|
|
|
environmental ratings. |
||||
|
II 2 G |
|
|
|
Special Conditions for Safe Use: |
|||||
|
Ex d IIB+H2 Gb T4/T6 |
|
|
The equipment must be installed in such a manner as to |
||||||
|
T4 Tamb = -52˚C ≤ Ta ≤ +85˚C |
|
|
minimize the risk of impact or friction with other metal surfaces. |
||||||
|
T6 Tamb = -52˚C ≤ Ta ≤ +45˚C |
|
|
To avoid possibility of static discharge clean only with a damp |
||||||
|
IP 66 |
|
|
|
|
cloth. |
|
|
||
|
Intrinsically Safe |
|
|
|
|
For Intrinsically Safe installations the positioner must be |
||||
|
|
|
|
|
connected to suitably rated intrinsically safe equipment, and |
|||||
|
FMG 12.0001X |
|
|
|
|
|||||
|
|
|
|
|
must be installed in accordance with applicable intrinsically safe |
|||||
|
Ex ia IIC Ga T4/T6 |
|
|
|||||||
|
|
|
installation standards. |
|||||||
|
T4 Tamb = -20˚C ≤ Ta ≤ +85˚C |
|
|
|||||||
|
|
|
Substitution of components may impair Intrinsic Safety. |
|||||||
|
T6 Tamb = -52˚C ≤ Ta ≤ +45˚C |
|
|
Use appropriately rated cable insulation at higher temperatures. |
||||||
|
IP 66 |
|
|
|
|
Contact Flowserve for flame path information. |
||||
|
Entity |
|
4-20 |
|
|
Conditions spéciales pour une utilisation en toute sécurité: |
||||
|
|
|
|
|
Le matériel doit être installé de sorte à réduire au minimum le |
|||||
|
Parameters |
|
Input |
|
|
|||||
|
|
|
|
|
risque de choc ou de frottement avec d'autres surfaces |
|||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
métalliques. |
|
|
|
|
Ui (Vdc)= |
|
30 |
|
|
|
|
|||
|
|
|
|
Pour éviter les risques de décharge d'électricité statique |
||||||
|
|
|
|
|
|
|
Nettoyez uniquement avec un chiffon humide. |
|||
|
Ii (mA)= |
|
100 |
|
|
|||||
|
|
|
|
Pour les installations en sécurité intrinsèque, le positionneur |
||||||
|
|
|
|
|
|
|
doit être connecté à un équipement sécurité intrinsèque |
|||
|
|
|
|
|
|
|
||||
|
Pi (mW)= |
|
800 |
|
|
|
convenablement qualifié, et doit être installé conformément aux |
|||
|
|
|
|
|
|
|
normes d'installation sécurité intrinsèque applicables. |
|||
|
Ci (nF)= |
|
0 |
|
|
|||||
|
|
|
|
La substitution de composants peut compromettre la sécurité |
||||||
|
|
|
|
|
|
|
intrinsèque. |
|
|
|
|
Li (µH)= |
|
47 |
|
|
|
|
|||
|
|
|
|
Utiliser une isolation appropriée du câble à des températures |
||||||
|
|
|
|
|
|
|
plus élevées. |
|
|
|
|
Note: Reference installation drawing # 291780 |
|
|
|
|
|||||
|
|
Contactez Flowserve pour les informations de trajet de flamme. |
||||||||
|
|
|
|
|
|
|||||
|
flowserve.com |
|
7 |
|
|
|
||||
User Instructions - Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
4 STORAGE AND UNPACKING
4.1 Storage
FLOWSERVE Control valve packages (a control valve and its instrumentation) are typically well protected from corrosion. Nevertheless FLOWSERVE products must be stored in a clean, dry environment such as an enclosed building that affords environmental protection. Heating is not required. Control valve packages must be stored on suitable skids, not directly on the floor. The storage location must also be free from flooding, dust, dirt, etc. Plastic caps are fitted to protect the flange faces and positioner ports to prevent the ingress of foreign materials. These caps should not be removed until the valve or positioner is actually mounted into the system.
If FLOWSERVE products (especially sealing materials) have been in storage for longer periods check these for corrosion or deterioration before using these products. Fire protection for FLOWSERVE products must be provided by the end user.
4.2 Unpacking
While unpacking the valve and/or Logix 500MD+ positioner, check the packing list against the materials received. Lists describing the system and accessories are included in each shipping container.
In the event of shipping damage, contact the shipper immediately. Should any problems arise, contact a Flowserve Flow Control Division representative.
4.3 Pre-installation Inspection
When installing a positioner, verify the shaft has not been damaged and that the plugs and cover are in place. The plugs keep debris and moisture from damaging the internal components of the positioner. If the positioner has been contaminated, clean the positioner components gently with a soft damp cloth. Some components may be removed for better access. See section 13 MAINTENANCE AND REPAIR. Check connectors to ensure that no debris is present. Port screens can be removed with a flat screwdriver for access to internal passages.
flowserve.com |
8 |
User Instructions - Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
5 MOUNTING AND INSTALLATION
5.1Direct Mounting to Valtek GS and FlowTop
Refer to Figure 2: Valtek GS and FlowTop Mounting.
1Assemble the take-off pin to the take-off plate and mount the take-off plate to the valve stem using the two screws. See Table 10: FlowTop and GS Take-Off Plate and Pin Configuration for proper plate and pin orientation.
2Place the actuator O-ring.
3Ensure the 1/16 NPT plug for the control port (if present) has been removed.
4Place the positioner on the actuator, ensuring the takeoff pin is inside the follower arm slot. Adjust the follower arm as needed.
NOTE: The feedback shaft has a clutch mechanism that allows for over-rotation of the shaft for easy adjustments. Just move the follower arm to the desired location.
5Use the actuator screws to secure the positioner in place.
6Connect regulated air supply to appropriate port in manifold. See section 6 TUBING.
7Connect the power to the 4-20 mA terminals. See section 7 ELECTRICAL CONNECTIONS.
8Remove main cover and locate DIP switches and QUICK-CAL/ACCEPT button.
9Refer to sticker on main board cover and set DIP switches accordingly. See section 8 STARTUP.
10Press the QUICK-CAL/ACCEPT button for three to four seconds or until the positioner begins to move. The positioner will now perform a stroke calibration.
 CAUTION: Performing a Stroke Calibration will cause full movement of the valve in both directions.
CAUTION: Performing a Stroke Calibration will cause full movement of the valve in both directions.
11If the calibration was successful the green LED will blink GGGG or GGGY and the valve will be in control mode.
12If calibration fails, as indicated by a RGGY blink code, retry the calibration. If it still fails, the feedback values were exceeded and the arm must be adjusted away from the positioner’s limits. Rotate the feedback shaft so that the full free travel of the feedback shaft is in the range of the actuator movement. Optionally, continue to attempt the calibration. Each calibration attempt adjusts the acceptable limits and it should pass eventually.
 CAUTION: Remember to remove the air supply before re-adjusting follower arm.
CAUTION: Remember to remove the air supply before re-adjusting follower arm.
NOTE: If mounted properly, the follower arm should be horizontal when the valve is at 50% stroke and should move approximately ±30° from horizontal over the full stroke of the valve.
NOTE: To virtually eliminate any non-linearity due to linkage geometry, use the Linearization feature on the Custom Characterization page of the DTM.
Actuator
 Actuator O-
Actuator O-
Take-Off
 Take-Off Plate
Take-Off Plate
Take-Off Plate
Screws
flowserve.com |
Figure 2: Valtek GS and FlowTop Mounting |
9 |
User Instructions - Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
Table 10: FlowTop and GS Take-Off Plate and Pin
Configurations
Actuator |
Stroke |
Plate and Pin Orientation |
|
(mm) |
|
|
|
|
127 / 252 |
10 |
|
|
|
|
127 / 252 |
20 |
|
50220 or 40
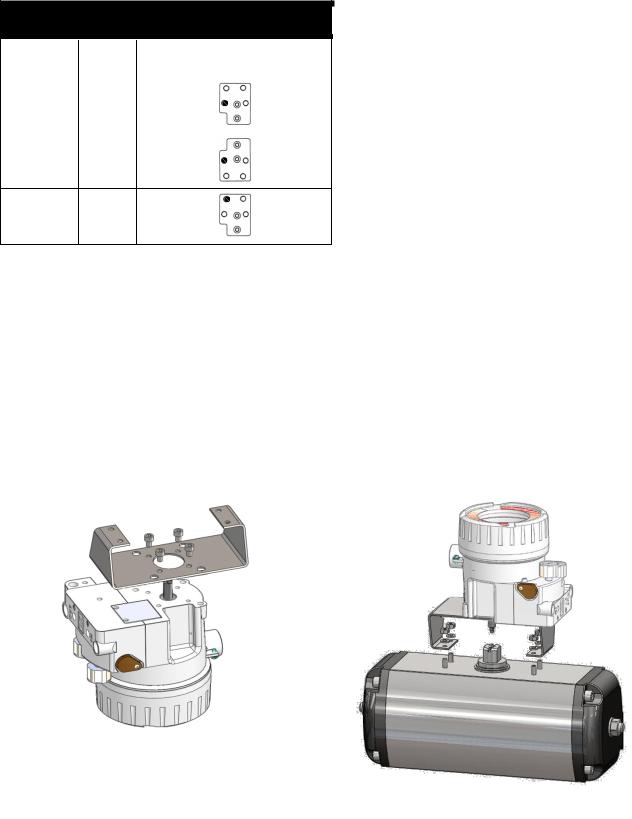
5.2Mounting to NAMUR Valves
1Attach the mounting plate to the positioner using 4 screws.
2Rotate the feedback shaft to match the orientation of the receiver on the actuator.
NOTE: The feedback shaft has a clutch mechanism that allows for over-rotation of the shaft for easy adjustments.
3 |
Mount the positioner onto the actuator using the |
||
|
washers |
and |
nuts. |
4Connect regulated air supply to appropriate port in manifold. See section 6 TUBING.
5Connect the power to the 4-20 mA terminals. See section 7 ELECTRICAL CONNECTIONS.
6Remove main cover and locate DIP switches and QUICK-CAL/ACCEPT button.
7Refer to sticker on main board cover and set DIP switches accordingly. See section 8 STARTUP.
8Press the QUICK-CAL/ACCEPT button for three to four seconds or until the positioner begins to move. The positioner will now perform a stroke calibration.
9If the calibration was successful the green LED will blink GGGG or GGGY and the valve will be in control mode.
10If calibration fails, as indicated by a RGGY blink code, retry the calibration. If it still fails, remove power from the positioner, disconnect the air, and remove the positioner from the actuator. Rotate the feedback shaft so that the full free travel of the feedback shaft is in the range of the actuator movement. Optionally, continue to attempt the calibration. Each calibration attempt adjusts the acceptable limits and it should pass eventually.
 CAUTION: Remember to remove the air supply before re-adjusting take-off arm.
CAUTION: Remember to remove the air supply before re-adjusting take-off arm.
Figure 3: NAMUR Bracket
Figure 4: AutoMax Assembly
flowserve.com |
10 |
User Instructions - Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
6 TUBING
After mounting has been completed, tube the positioner to the actuator using the appropriate compression fitting connectors. For best performance, use 10 mm (3/8 inch) tubing for 645 square cm (100 square inch) actuators or larger.
6.1 Determine Air Action
The port labeled “Out” delivers air when an air supply is present and the relay is energized. This port should be tubed to the pneumatic side of the actuator (the side that would result in the air compressing the actuator spring). When tubed this way, the spring is designed to return the valve to the fail safe state should supply air or power to the unit fail.
If air from the output should open the valve, set the Air Action configuration switch on the positioner to Air-to-Open, otherwise set it to Air-to-Close.
The Air-to-Open and Air-to-Close selection is determined by the actuator assembly, not the software.
6.3 Vented Design
A standard Logix 420 positioner is vented directly to the atmosphere. When supply air is substituted with sweet natural gas, piping must be used to route the exhausted natural gas to a safe environment.
The exhaust port is located on the bottom of the positioner. The port is tapped with either ¼ NPTF threads and covered with a protective cap. To control vented gas, remove the cap and connect the necessary tubing/piping to this port.
This piping system may cause some positioner back pressure.
The maximum allowable back pressure from the exhaust port is 0.14 barg (2.0 PSIG). For output flow rates, see section 2.4 Pneumatic Output.
 CAUTION: The back pressure in the main housing must never rise above 0.14 barg (2.0 PSIG). This could cause the positioner to become unresponsive under some circumstances.
CAUTION: The back pressure in the main housing must never rise above 0.14 barg (2.0 PSIG). This could cause the positioner to become unresponsive under some circumstances.
6.2 Connect Supply Port
The positioner ports are threaded with 1/4 NPTF. The direct mount output is 1/16 NPTF.
In order to maintain the recommended air quality, a coalescing filter should always be installed in the supply gas line. An air filter is highly recommended for all applications where dirty air is a possibility. The positioner passage ways are equipped with small filters, which remove medium and coarse size dirt from the pressurized air. If necessary, they are easily accessible for cleaning.
In applications where the supply pressure is higher than the maximum actuator pressure rating a supply regulator is required to lower the pressure to the actuator’s maximum rating.
6.4 Purging
Purging is intended to supply the non-pressurized side of a single acting actuator with instrument air. This helps prevent air from the environment (which may be salty, dirty or humid) from corroding the springs and other actuator components. Purging uses exhaust air from the positioner to flush the spring side of the actuator.
Tubing Configuration - Tube the Exhaust port with a “T” where one line goes to the non-pressurized side of the positioner and the second line goes to the atmosphere. Install an exhaust plug on the second line to prevent debris from entering the tubing.
Out (Direct Mount Control)
Out (Control)
In (Supply)
Exhaust (Piezo and Actuator)
(0.14 barg (2 psi) Max)
|
Figure 5: Pneumatic Ports |
flowserve.com |
11 |

User Instructions - Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
7 ELECTRICAL CONNECTIONS
7.1 Electrical Terminals
Housing EARTH
Terminal
Internal
External
HART 4-20 mA Inp ut -
Figure 6: Terminal Diagram
Example:
7.2 Command Input (4-20 mA) Connection
The Logix 420 is reverse polarity protected, however, verify polarity when making field termination connection. Wire 4-20 mA current source to the input terminal labeled “HART 4- 20mA INPUT”. See Figure 6: Terminal Diagram. Depending on the current source, a HART filter may be required. See 14.1 Troubleshooting Guide.
( )
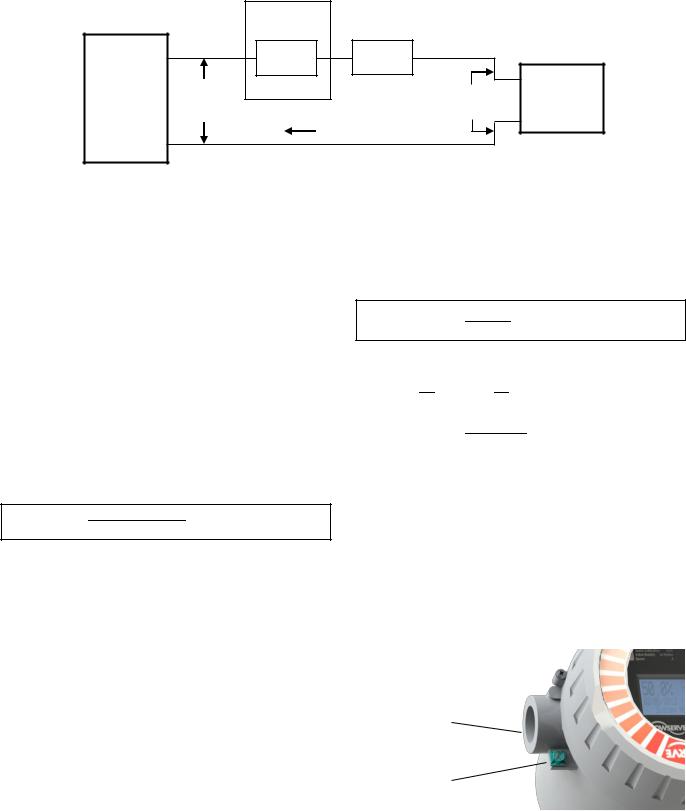
7.2.1Compliance Voltage
Output compliance voltage refers to the voltage limit the current source can provide. A current loop system consists of the current source, wiring resistance, barrier resistance (if present), and the Logix 420 impedance.
The Logix 420 requires that the current loop system allow for a 10 VDC drop across the positioner at maximum loop current. The operating current range is from 3.8 to 24 mA.
In order to determine if the loop will support the Logix 420, perform the calculation in Equation 1. The Available Voltage must be greater than 10VDC in order to support the Logix 420. Also, see Table 1: Input Signal.
Equation 1
( )
( )
The available voltage (12.5 V) is greater than the required voltage (10.0 V) therefore; this system will support the Logix 420. The Logix 420 has an input resistance equivalent to 500
Ω at a 20 mA input current.
 CAUTION: The current must always be limited for 4-20 mA operation. Never connect a voltage source directly across the Logix 420 terminals. This could cause permanent circuit board damage.
CAUTION: The current must always be limited for 4-20 mA operation. Never connect a voltage source directly across the Logix 420 terminals. This could cause permanent circuit board damage.
flowserve.com |
12 |
User Instructions - Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
|
|
Barrier |
|
|
|
|
(If Present) |
Wire |
|
4-20 mA |
Controller |
R |
R Compliance 10 |
|
Current |
Voltage |
|
Voltage |
VDC |
Source |
|
|||
|
|
|
|
|
|
|
|
Current |
|
+
-
Logix
420
Figure 7: Compliance Voltage
7.2.2Cable Requirements
The Logix 420 digital positioner utilizes the HART Communication protocol. This communication signal is superimposed on the 4-20 mA current signal. The two frequencies used by the HART protocol are 1200 Hz and 2200 Hz. In order to prevent distortion of the HART communication signal, cable capacitance and cable length restrictions must be calculated. The cable length must be limited if the capacitance is too high. Selecting a cable with lower capacitance/foot rating will allow longer cable runs. In addition to the cable capacitance, the network resistance also affects the allowable cable length.
In order to calculate the maximum network capacitance, use the following formula:
Equation 2
( ) |
( |
) |
|
Example:
|
(if present) |
|
|
||
( ) |
|
|
|
= 0.08 |
|
( |
) |
||||
|
|
||||
In order to calculate the maximum cable length, use the following formula:
Equation 3
Example:
To control cable resistance, 24 AWG cable should be used for runs less than 5000 feet. For cable runs longer than 5000 feet, 20 AWG cable should be used.
The input loop current signal to the Logix 420 digital positioner should be in shielded cable. Shields must be tied to a ground at only one end of the cable to provide a place for environmental electrical noise to be removed from the cable. In general, shield wire should be connected at the source, not at the positioner.
Conduit
Connection
Grounding
Terminal
Figure 8: Conduit and Grounding
flowserve.com |
13 |

User Instructions - Logix® 420 Series Digital Positioners FCD LGENIM0106-06 12/13
7.2.3Intrinsically Safe Barriers
When selecting an intrinsically safe barrier, make sure the barrier is HART compatible. Although the barrier will pass the loop current and allow normal positioner control, if not compatible, it may prevent HART communication.
7.2.4Grounding and Conduit
The grounding terminal, located by the electrical conduit port should be used to provide the unit with an adequate and reliable earth ground reference. This ground should be tied to the same ground as the electrical conduit. Additionally, the electrical conduit should be earth grounded at both ends of its run.
This product has electrical conduit connections in a thread size of 1/2" NPTF. Conduit fittings must match equipment housing threads for installation.
NOTE: The grounded screw must not be used to terminate signal shield wires. Shield wires should be terminated only at the signal source.
7.2.5Electromagnetic Compatibility
The Logix 420 digital positioner has been designed to operate correctly in electromagnetic (EM) fields found in typical industrial environments. Care should be taken to prevent the positioner from being used in environments with excessively high EM field strengths (greater than 10 V/m). Portable EM devices such as hand-held two-way radios should not be used within 30 cm of the device.
Ensure proper wiring and shielding techniques of the control lines, and route control lines away from electromagnetic sources that may cause unwanted electrical noise. An electromagnetic line filter can be used to further eliminate noise (FLOWSERVE Part Number 10156843).
In the event of a severe electrostatic discharge near the positioner, the device should be inspected to ensure correct operability. It may be necessary to recalibrate the Logix 420 positioner to restore operation.
7.3Connections for Intrinsically Safe Operation
For intrinsically safe connections, see entity parameters in section 3 HAZARDOUS AREA CERTIFICATIONS. If a control drawing is required, ask your Flowserve representative for drawing 314746 - CONTROL DRAWING, LOGIX 420 DIGITAL POSITIONER.
Configuration |
|
Switches |
Selectable |
|
GAIN |
Display |
Switch |
LED
Status
Lights
HART |
|
|
|
4-20 |
|
|
|
mA |
|
|
|
Input BACK |
|
|
|
Button |
|
|
|
(Move |
UP Button |
QUICK-CAL/ |
|
Left) |
ACCEPT |
||
|
|||
|
DOWN Button |
Button |
|
|
|
||
Figure 9: Local User Interface |
|
||
flowserve.com |
14 |
Loading...