


0i Mate
Table of contents
 Loading...
Loading...
PARAMETER MANUAL
B-64310EN/02
FANUC Series 0
+
-MODEL D
FANUC Series 0+ Mate-MODEL D
• No part of this manual may be reproduced in any form.
• All specifications and designs are subject to change without notice.
The products in this manual are controlled based on Japan’s “Foreign Exchange and
Foreign Trade Law”. The export from Japan may be subject to an export license by the
government of Japan.
Further, re-export to another country may be subject to the license of the government of
the country from where the product is re-exported. Furthermore, the product may also be
controlled by re-export regulations of the United States government.
Should you wish to export or re-export these products, please contact FANUC for advice.
In this manual we have tried as much as possible to describe all the various matters.
However, we cannot describe all the matters which must not be done, or which cannot be
done, because there are so many possibilities.
Therefore, matters which are not especially described as possible in this manual should be
regarded as ”impossible”.
B-64310EN/02 DEFINITION OF WARNING, CAUTION, AND NOTE
s-1
DEFINITION OF WARNING, CAUTION, AND NOTE
This manual includes safety precautions for protecting the user and preventing damage to the machine.
Precautions are classified into Warning and Caution according to their bearing on safety. Also,
supplementary information is described as a Note. Read the Warning, Caution, and Note thoroughly
before attempting to use the machine.
WARNING
Applied when there is a danger of the user being injured or when there is a
danger of both the user being injured and the equipment being damaged if the
approved procedure is not observed.
CAUTION
Applied when there is a danger of the equipment being damaged, if the
approved procedure is not observed.
NOTE
The Note is used to indicate supplementary information other than Warning and
Caution.
• Read this manual carefully, and store it in a safe place.

B-64310EN/02 PREFACE
p-1
PREFACE
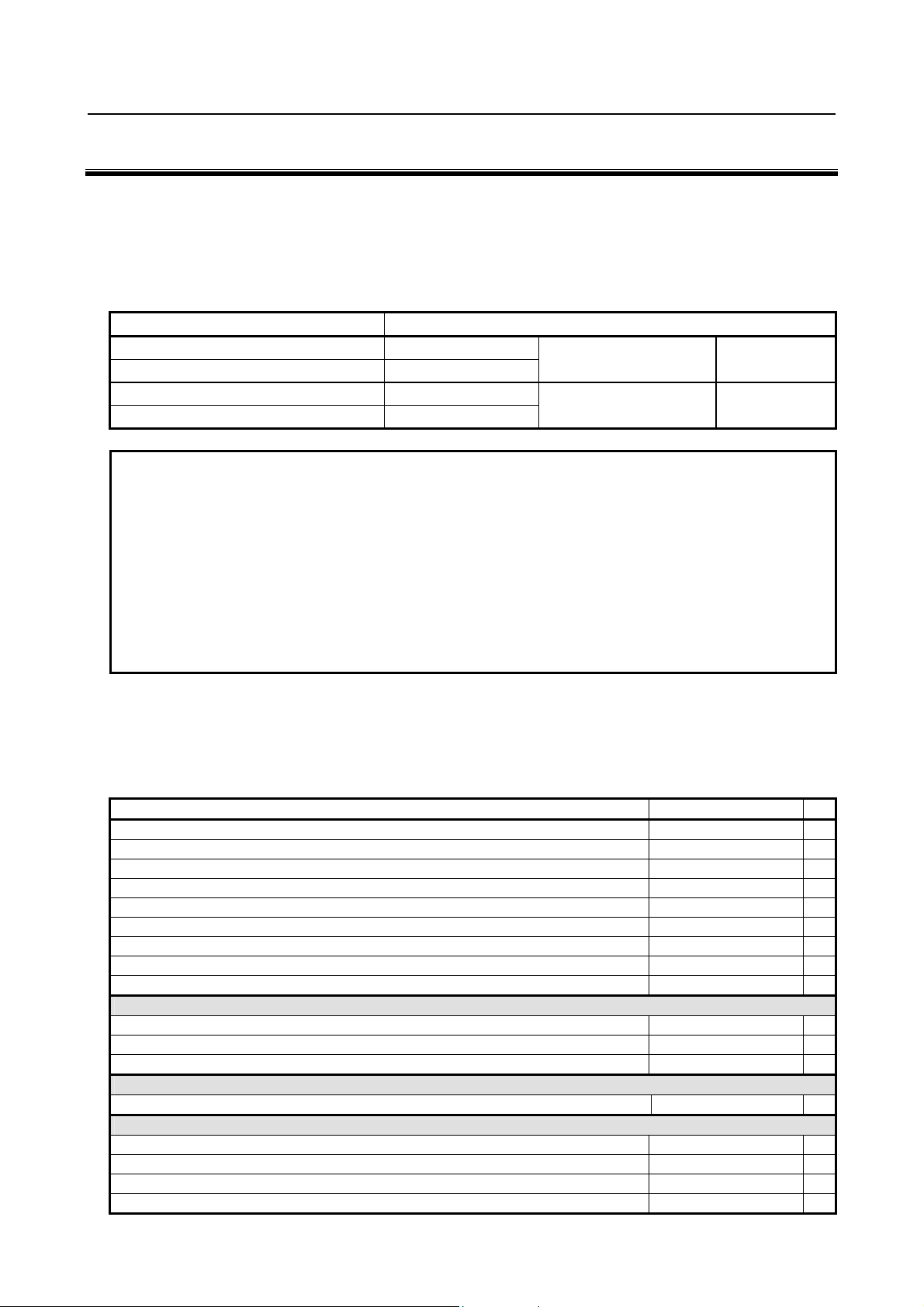
Applicable models
This manual describes the following models that are 'Nano CNC'.
'Nano CNC system' which realizes high precision machining can be constructed by combining these
models and high speed, high precision servo controls.
In the text, the abbreviations may be used in addition to Model name indicated below.
Model name Abbreviation
FANUC Series 0i -TD 0i -TD
FANUC Series 0i -MD 0i -MD
Series 0i -D 0i -D
FANUC Series 0i Mate -TD 0i Mate -TD
FANUC Series 0i Mate -MD 0i Mate -MD
Series 0i Mate -D 0i Mate -D
NOTE
1 For an explanatory purpose, the following descriptions may be used according to
the types of path control used:
- T series: 0
i
-TD / 0
i
Mate -TD
- M series: 0
i
-MD / 0
i
Mate -MD
2 Some functions described in this manual may not be applied to some products.
For details, refer to the DESCRIPTIONS (B-64302EN).
3 The 0
i
-D / 0
i
Mate
-D requires setting of parameters to enable part of basic
functions. For the parameters to be set, see Section 4.51, "PARAMETERS OF 0
i
-D / 0
i
Mate
-D BASIC FUNCTIONS".
Related manuals of Series 0i -D,Series 0i Mate -D
The following table lists the manuals related to Series 0i -D,Series 0i Mate -D. This manual is indicated
by an asterisk(*).
Table 1 Related manuals
Manual name Specification number
DESCRIPTIONS B-64302EN
CONNECTION MANUAL (HARDWARE) B-64303EN
CONNECTION MANUAL (FUNCTION) B-64303EN-1
OPERATOR’S MANUAL (Common to Lathe System/Machining Center System) B-64304EN
OPERATOR’S MANUAL (For Lathe System) B-64304EN-1
OPERATOR’S MANUAL (For Machining Center System) B-64304EN-2
MAINTENANCE MANUAL B-64305EN
PARAMETER MANUAL B-64310EN *
START-UP MANUAL B-64304EN-3
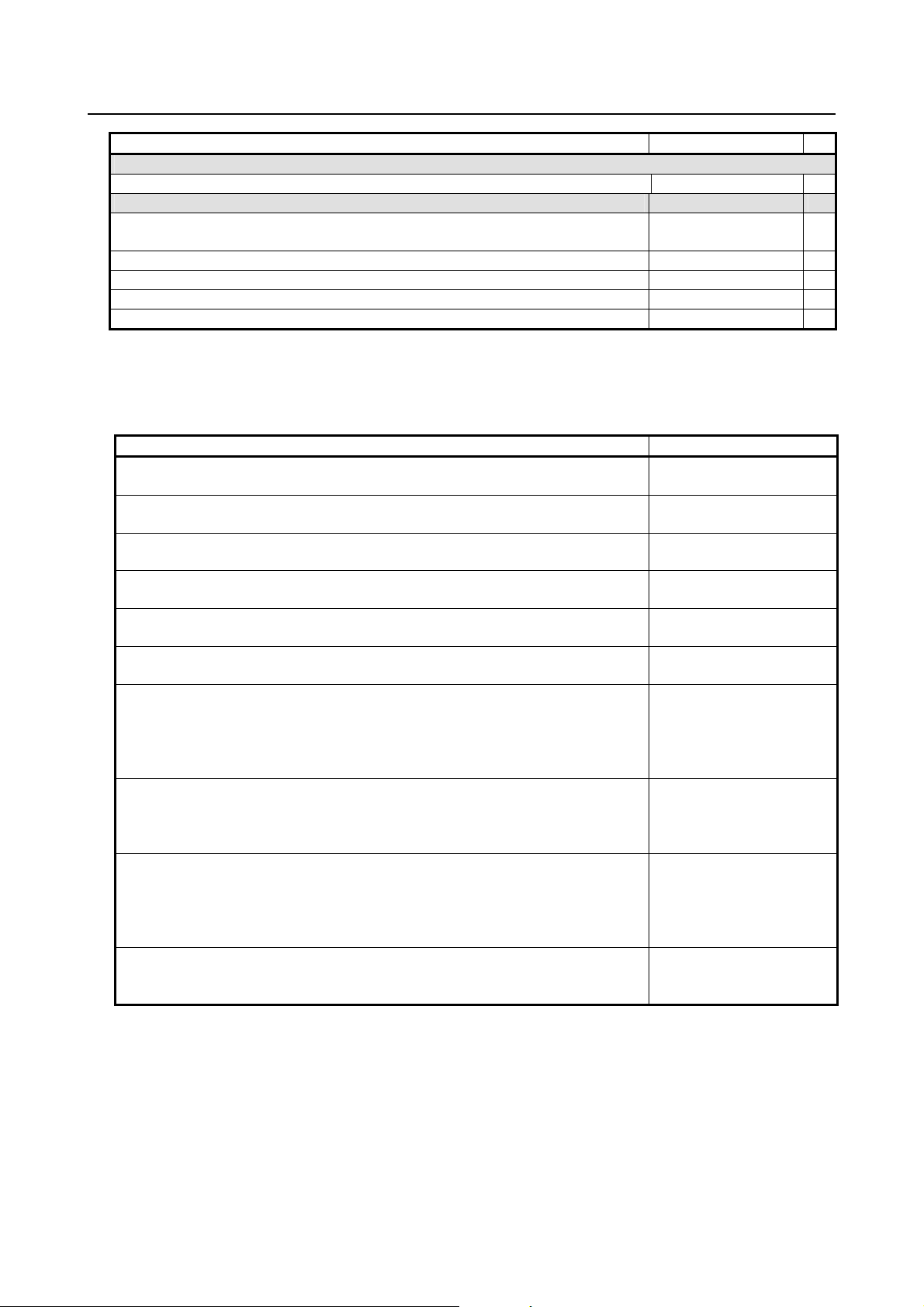
Programming
Macro Compiler / Macro Executor PROGRAMMING MANUAL B-64303EN-2
Macro Compiler OPERATOR’S MANUAL B-64304EN-5
C Language PROGRAMMING MANUAL B-64303EN-3
PMC
PMCPROGRAMMING MANUAL B-64393EN
Network
PROFIBUS-DP Board CONNECTION MANUAL B-64403EN
Fast Ethernet / Fast Data Server OPERATOR’S MANUAL B-64414EN
DeviceNet Board CONNECTION MANUAL B-64443EN
FL-net Board CONNECTION MANUAL B-64453EN
PREFACE B-64310EN/02
p-2
Manual name Specification number
Dual Check Safety
Dual Check Safety CONNECTION MANUAL B-64303EN-4
Operation guidance function
MANUAL GUIDE i (Common to Lathe System/Machining Center System)
OPERATOR’S MANUAL
B-63874EN
MANUAL GUIDE i (For Machining Center System) OPERATOR’S MANUAL
B-63874EN-2
MANUAL GUIDE i (Set-up Guidance Functions) OPERATOR’S MANUAL
B-63874EN-1
MANUAL GUIDE 0i OPERATOR’S MANUAL
B-64434EN
TURN MATE i OPERATOR’S MANUAL
B-64254EN
Related manuals of SERVO MOTOR
The following table lists the manuals related to SERVO MOTOR αi/βi series
Table 2 Related manuals
Manual name Specification number
FANUC AC SERVO MOTOR αi series
DESCRIPTIONS
B-65262EN
FANUC AC SPINDLE MOTOR αi series
DESCRIPTIONS
B-65272EN
FANUC AC SERVO MOTOR βi series
DESCRIPTIONS
B-65302EN
FANUC AC SPINDLE MOTOR βi series
DESCRIPTIONS
B-65312EN
FANUC SERVO AMPLIFIER αi series
DESCRIPTIONS
B-65282EN
FANUC SERVO AMPLIFIER βi series
DESCRIPTIONS
B-65322EN
FANUC SERVO MOTOR αis series
FANUC SERVO MOTOR αi series
FANUC AC SPINDLE MOTOR αi series
FANUC SERVO AMPLIFIER αi series
MAINTENANCE MANUAL
B-65285EN
FANUC SERVO MOTOR βis series
FANUC AC SPINDLE MOTOR βi series
FANUC SERVO AMPLIFIER βi series
MAINTENANCE MANUAL
B-65325EN
FANUC AC SERVO MOTOR αi series
FANUC AC SERVO MOTOR βi series
FANUC LINEAR MOTOR LiS series
FANUC SYNCHRONOUS BUILT-IN SERVO MOTOR DiS series
PARAMETER MANUAL
B-65270EN
FANUC AC SPINDLE MOTOR αi/βi series,
BUILT-IN SPINDLE MOTOR Bi series
PARAMETER MANUAL
B-65280EN
This manual mainly assumes that the FANUC SERVO MOTOR αi series of servo motor is used. For
servo motor and spindle information, refer to the manuals for the servo motor and spindle that are actually
connected.

B-64310EN/02 TABLE OF CONTENTS
c-1
TABLE OF CONTENTS
DEFINITION OF WARNING, CAUTION, AND NOTE .................................s-1
PREFACE....................................................................................................p-1
1 DISPLAYING PARAMETERS................................................................. 1
2 SETTING PARAMETERS FROM MDI .................................................... 2
3 INPUTTING AND OUTPUTTING PARAMETERS THROUGH THE
READER/PUNCHER INTERFACE .........................................................4
3.1 OUTPUTTING PARAMETERS THROUGH THE READER/PUNCHER
INTERFACE ..................................................................................................4
3.2 INPUTTING PARAMETERS THROUGH THE READER/PUNCHER
INTERFACE ..................................................................................................5
3.3 I/O FORMATS ............................................................................................... 6
3.3.1 Keywords .................................................................................................................6
3.3.2 Inch/Metric Switching..............................................................................................7
3.3.3 Bit Format.................................................................................................................7
3.3.4 Bit Machine Group Format ......................................................................................7
3.3.5 Bit Path Format ........................................................................................................7
3.3.6 Bit Axis Format........................................................................................................8
3.3.7 Bit Spindle Format ...................................................................................................8
3.3.8 Byte/Word/Two-Word Format.................................................................................9
3.3.9 Byte/Word/Two-Word Machine Group Format.......................................................9
3.3.10 Byte/Word/Two-Word Path Format.........................................................................9
3.3.11 Byte/Word/Two-Word Axis Format ......................................................................10
3.3.12 Byte/Word/Two-Word Spindle Format..................................................................10
3.3.13 Real Number Format ..............................................................................................10
3.3.14 Real Number Machine Group Format....................................................................11
3.3.15 Real Number Path Format......................................................................................11
3.3.16 Real Number Axis Format......................................................................................12
3.3.17 Real Number Spindle Format.................................................................................12
3.3.18 Start and End of a Record.......................................................................................13
4 DESCRIPTION OF PARAMETERS ......................................................14
4.1 DATA TYPE................................................................................................. 14
4.2 REPRESENTATION OF PARAMETERS .................................................... 15
4.3 STANDARD PARAMETER SETTING TABLES........................................... 16
4.4 PARAMETERS OF SETTING...................................................................... 18
4.5 PARAMETERS OF READER/PUNCHER INTERFACE ..............................20
4.5.1 Parameters Common to All Channels ....................................................................20
4.5.2 Parameters of Channel 1 (I/O CHANNEL=0) .......................................................24
4.5.3 Parameters of Channel 1 (I/O CHANNEL=1) .......................................................25
4.5.4 Parameters of Channel 2 (I/O CHANNEL=2) .......................................................26
4.6 PARAMETERS OF CNC SCREEN DISPLAY FUNCTIONS........................ 26
4.7 PARAMETERS OF ETHERNET/DATA SERVER FUNCTIONS.................. 27
4.8 PARAMETERS OF POWER MATE CNC.................................................... 30
4.9 PARAMETERS OF SYSTEM CONFIGURATION .......................................31

TABLE OF CONTENTS B-64310EN/02
c-2
4.10 PARAMETERS OF AXIS CONTROL/INCREMENT SYSTEM..................... 32
4.11 PARAMETERS OF COORDINATES........................................................... 43
4.12 PARAMETERS OF STORED STROKE CHECK ......................................... 49
4.13 PARAMETERS OF THE CHUCK AND TAIL STOCK BARRIER (T SERIES)
..................................................................................................................... 53
4.14 PARAMETERS OF FEEDRATE .................................................................. 58
4.15 PARAMETERS OF ACCELERATION/DECELERATION CONTROL .......... 69
4.16 PARAMETERS OF SERVO (1 OF 2) .......................................................... 82
4.17 PARAMETERS OF DI/DO (1 OF 2)........................................................... 118
4.18 PARAMETERS OF DISPLAY AND EDIT (1 OF 5) .................................... 125
4.19 PARAMETERS OF PROGRAMS (1 OF 3)................................................ 150
4.20 PARAMETERS OF PITCH ERROR COMPENSATION ............................ 159
4.21 PARAMETERS OF SPINDLE CONTROL .................................................165
4.22 PARAMETERS OF TOOL COMPENSATION (1 OF 3) ............................. 196
4.23 PARAMETERS OF CANNED CYCLES..................................................... 208
4.23.1 Parameters of Canned Cycle for Drilling (1 of 2) ................................................208
4.23.2 Parameters of Thread Cutting Cycle (T Series)....................................................214
4.23.3 Parameters of Multiple Repetitive Canned Cycle (T Series)................................214
4.23.4 Parameters of Canned Cycle for Drilling (2 of 2) ................................................219
4.23.5 Parameters of Canned Cycle for Grinding (for Grinding Machine).....................223
4.24 PARAMETERS OF RIGID TAPPING (1 OF 2) .......................................... 226
4.25 PARAMETERS OF SCALING (M SERIES) /COORDINATE ROTATION (M
SERIES) .................................................................................................... 238
4.26 PARAMETERS OF SINGLE DIRECTIONAL POSITIONING (M SERIES) 239
4.27 PARAMETERS OF POLAR COORDINATE INTERPOLATION (T SERIES)
................................................................................................................... 240
4.28 PARAMETERS OF NORMAL DIRECTION CONTROL (M SERIES) ........ 241
4.29 PARAMETERS OF INDEX TABLE INDEXING (M SERIES) ..................... 242
4.30 PARAMETERS OF SIMPLE STRAIGHTNESS COMPENSATION (M
SERIES) .................................................................................................... 245
4.31 PARAMETERS OF INCLINATION COMPENSATION ..............................247
4.32 PARAMETERS OF CUSTOM MACROS................................................... 248
4.33 PARAMETERS OF PATTERN DATA INPUT ............................................ 261
4.34 PARAMETERS OF SKIP FUNCTION ....................................................... 262
4.35 PARAMETERS OF EXTERNAL DATA INPUT/OUTPUT ..........................270
4.36 PARAMETERS OF MANUAL HANDLE RETRACE (1 OF 2) ....................272
4.37 PARAMETERS OF GRAPHIC DISPLAY (1 OF 3) ....................................276
4.38 PARAMETERS OF SCREEN DISPLAY COLORS (1 OF 2)...................... 280
4.39 PARAMETERS OF RUN HOUR AND PARTS COUNT DISPLAY............. 280
4.40 PARAMETERS OF TOOL LIFE MANAGEMENT (1 OF 2)........................ 283
4.41 PARAMETERS OF POSITION SWITCH FUNCTIONS ............................. 290
4.42 PARAMETERS OF MANUAL OPERATION AND AUTOMATIC OPERATION
................................................................................................................... 292
4.43 PARAMETERS OF MANUAL HANDLE FEED, HANDLE INTERRUPTION
AND HANDLE FEED IN TOOL AXIAL DIRECTION .................................. 292
4.44 PARAMETERS OF REFERENCE POSITION WITH MECHANICAL
STOPPER ................................................................................................. 296

B-64310EN/02 TABLE OF CONTENTS
c-3
4.45 PARAMETERS OF SOFTWARE OPERATOR'S PANEL .......................... 297
4.46 PARAMETERS OF PROGRAM RESTART............................................... 300
4.47 PARAMETERS OF POLYGON TURNING (T SERIES) ............................ 301
4.48 PARAMETERS OF THE ELECTRONIC GEAR BOX (EGB) (M SERIES) /
GENERAL-PURPOSE RETRACTION....................................................... 308
4.49 PARAMETERS OF AXIS CONTROL BY PMC (1 OF 2) ........................... 314
4.50 PARAMETERS OF 2-PATH CONTROL (T SERIES) ................................ 322
4.51 PARAMETERS OF 0i -D / 0i Mate -D BASIC FUNCTIONS ......................324
4.52 PARAMETERS OF INTERFERENCE CHECK BETWEEN PATHS (T SERIES)
(2-PATH CONTROL) ................................................................................. 330
4.53 PARAMETERS OF SYNCHRONOUS/COMPOSITE CONTROL AND
SUPERIMPOSED CONTROL (T SERIES) (1 OF 2) .................................332
4.54 PARAMETERS OF ANGULAR AXIS CONTROL ...................................... 344
4.55 PARAMETERS OF AXIS SYNCHRONOUS CONTROL ........................... 346
4.56 PARAMETERS OF SEQUENCE NUMBER COMPARISON AND STOP.. 352
4.57 PARAMETERS OF ADVANCED PREVIEW CONTROL / AI ADVANCED
PREVIEW CONTROL / AI CONTOUR CONTROL / AI CONTOUR CONTROL
II (1 OF 2) ..................................................................................................352
4.58 OTHER PARAMETERS ............................................................................ 355
4.59 PARAMETERS OF MAINTENANCE ......................................................... 359
4.60 PARAMETERS OF THE INCORRECT OPERATION PREVENTION
FUNCTION ................................................................................................ 361
4.61 PARAMETERS OF AUTOMATIC DATA BACKUP.................................... 369
4.62 PARAMETERS OF SCREEN DISPLAY COLORS (2 OF 2)...................... 370
4.63 PARAMETERS OF WAVEFORM DIAGNOSIS ......................................... 371
4.64 PARAMETERS OF SPINDLE CONTROL WITH SERVO MOTOR (T SERIES)
................................................................................................................... 371
4.65 PARAMETERS OF INCH/METRIC CONVERSION AND DIAMETER/RADIUS
SWITCHING (1 OF 2)................................................................................ 377
4.66 PARAMETERS OF DI/DO (2 OF 2)........................................................... 378
4.67 PARAMETERS OF FEEDRATE CONTROL AND
ACCELERATION/DECELERATION CONTROL........................................ 378
4.68 PARAMETERS OF COORDINATE SYSTEM............................................ 379
4.69 PARAMETERS OF DISPLAY AND EDIT (2 OF 5) .................................... 381
4.70 PARAMETERS OF GRAPHIC DISPLAY (2 OF 3) ....................................387
4.71 PARAMETERS OF DISPLAY AND EDIT (3 OF 5) .................................... 392
4.72 PARAMETERS OF TOOL COMPENSATION (2 OF 3) ............................. 393
4.73 PARAMETERS OF RIGID TAPPING (2 OF 2) .......................................... 393
4.74 PARAMETERS OF PROGRAMS (2 OF 3)................................................ 397
4.75 PARAMETERS OF DISPLAY AND EDIT (4 OF 5) .................................... 397
4.76 PARAMETERS OF PROGRAMS (3 OF 3)................................................ 398
4.77 PARAMETERS OF MACHINING QUALITY LEVEL ADJUSTMENT (M
SERIES) .................................................................................................... 398
4.78 PARAMETERS OF SERVO (2 OF 2) ........................................................ 399
4.79 PARAMETERS OF AXIS CONTROL BY PMC (2 OF 3) ........................... 400
4.80 PARAMETERS OF PMC ........................................................................... 400

TABLE OF CONTENTS B-64310EN/02
c-4
4.81 PARAMETERS OF MALFUNCTION PROTECTION................................. 400
4.82 PARAMETERS OF MANUAL HANDLE..................................................... 401
4.83 PARAMETERS OF SYNCHRONOUS/COMPOSITE CONTROL AND
SUPERIMPOSED CONTROL (T SERIES) (2 OF 2) .................................402
4.84 PARAMETERS OF AXIS CONTROL BY PMC (3 OF 3) ........................... 403
4.85 PARAMETERS OF DISPLAY AND EDIT (5 OF 5) .................................... 405
4.86 PARAMETERS OF TOOL LIFE MANAGEMENT (2 OF 2)........................ 412
4.87 PARAMETERS OF THE MACHINING CONDITION SELECTION FUNCTION
................................................................................................................... 413
4.88 PARAMETERS OF PARAMETER CHECK SUM ......................................418
4.89 PARAMETERS OF INCH/METRIC CONVERSION AND DIAMETER/RADIUS
SWITCHING (2 OF 2)................................................................................ 419
4.90 PARAMETERS OF LINEAR SCALE WITH ABSOLUTE ADDRESS
REFERENCE POSITION .......................................................................... 420
4.91 PARAMETERS OF FSSB.......................................................................... 421
4.92 PARAMETERS OF GRAPHIC DISPLAY (3 OF 3) ....................................424
4.93 PARAMETERS OF EMBEDDED ETHERNET........................................... 425
4.94 PARAMETERS OF MANUAL HANDLE RETRACE (2 OF 2) ....................426
4.95 PARAMETERS OF ADVANCED PREVIEW CONTROL / AI ADVANCED
PREVIEW CONTROL / AI CONTOUR CONTROL / AI CONTOUR CONTROL
II (2 OF 2) ..................................................................................................427
4.96 PARAMETERS OF NANO SMOOTHING (M SERIES) .............................429
4.97 PARAMETERS OF TOOL COMPENSATION (3 OF 3) ............................. 430
APPENDIX
A CHARACTER CODE LIST..................................................................435
B-64310EN/02 1.DISPLAYING PARAMETERS
- 1 -
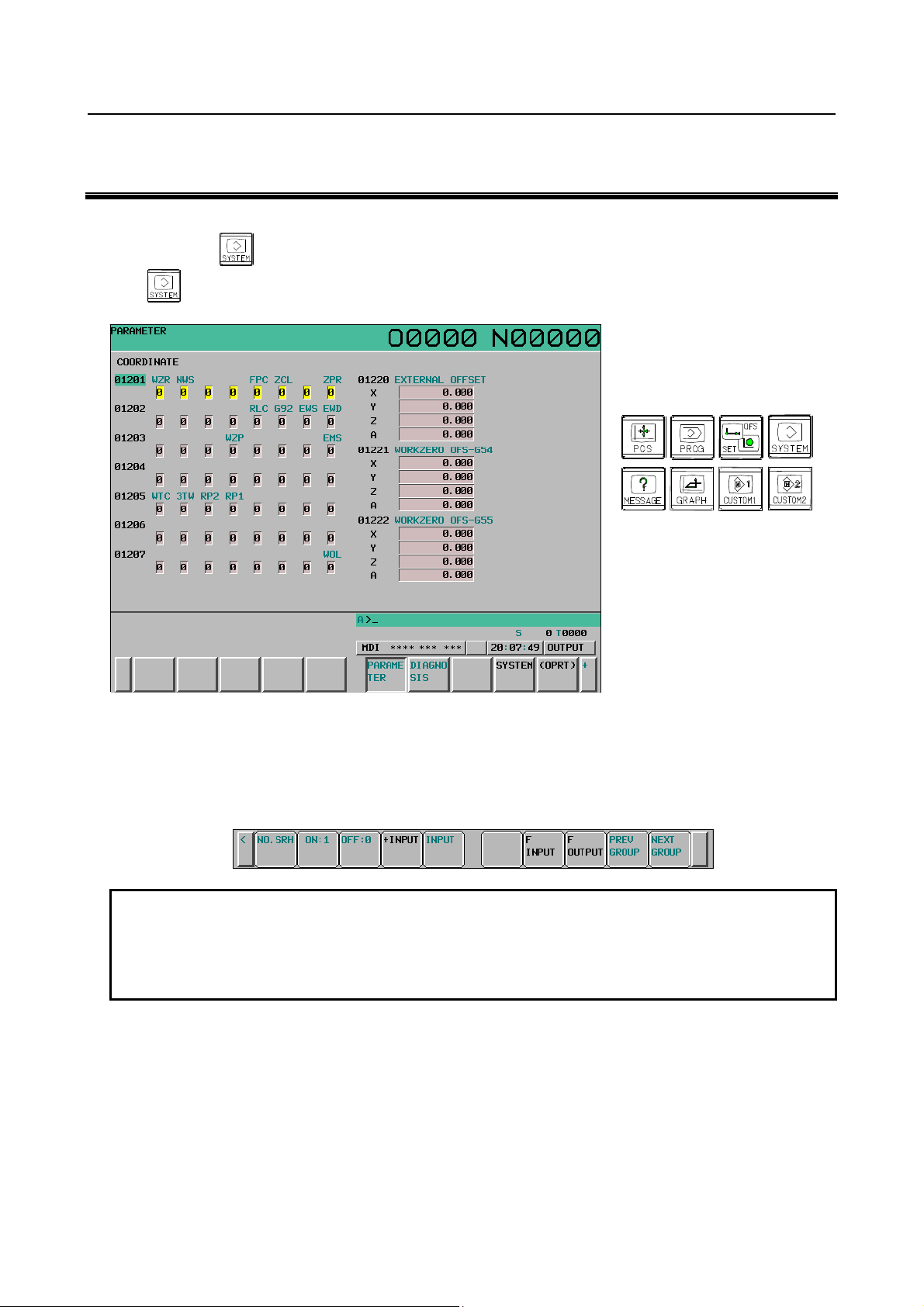
1 DISPLAYING PARAMETERS
Follow the procedure below to display parameters.
1 Press the
function key on the MDI as many times as required, or alternatively, press the
function key once, then the PARAM section display soft key. The parameter screen is then
selected.
Function keys
2 The parameter screen consists of multiple pages. Use step (a) or (b) to display the page that contains
the parameter you want to display.
(a) Use the page select key or the cursor move keys to display the desired page.
(b) Enter the data number of the parameter you want to display from the keyboard, then press the
[NO.SRH] soft key. The parameter page containing the specified data number appears with the
cursor positioned at the data number. (The data is displayed in reverse video.)
NOTE
If key entry is started with the section select soft keys displayed, they are
replaced automatically by operation select soft keys including [NO.SRH].
Pressing the [(OPRT)] soft key can also cause the operation select keys to be
displayed.
2.SETTING PARAMETERS FROM MDI B-64310EN/02
- 2 -
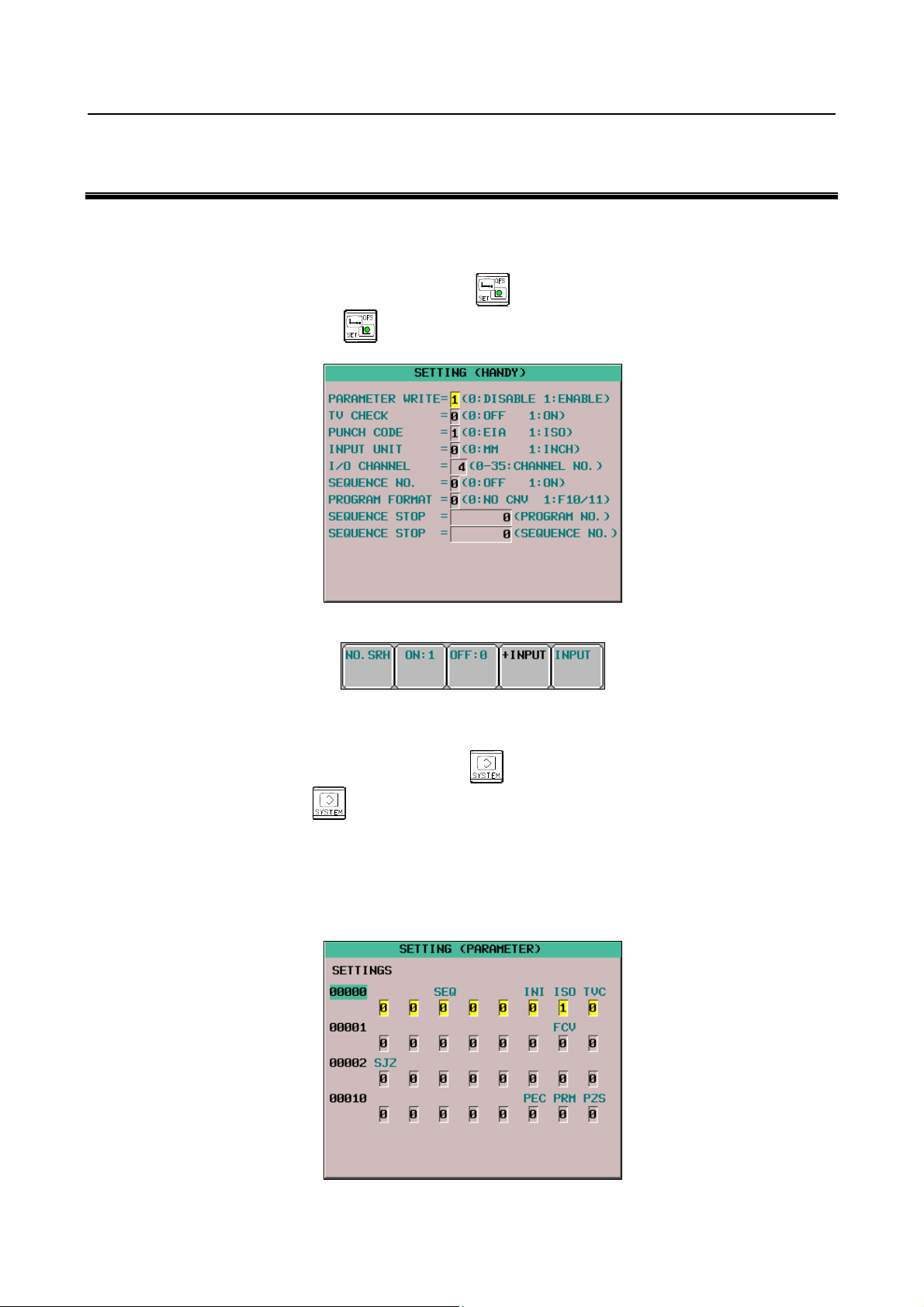
2 SETTING PARAMETERS FROM MDI
Follow the procedure below to set parameters.
1 Place the NC in the MDI mode or the emergency stop state.
2 Follow the substeps below to enable writing of parameters.
2-1 To display the setting screen, press the
function key as many times as required, or
alternatively press the
function key once, then the [SETTING] section select soft key.
(The first page of the setting screen appears.)
2-2 Position the cursor on "PARAMETER WRITE" using the cursor move keys.
2-3 Press the [(OPRT)] soft key to display operation select soft keys.
2-4 To set "PARAMETER WRITE=" to 1, press the [ON:1] soft key, or alternatively enter 1 and
press the [INPUT] soft key. From now on, the parameters can be set. At the same time an alarm
condition (SW0100 PARAMETER WRITE ENABLE) occurs in the CNC.
3 To display the parameter screen, press the
function key as many times as required, or
alternatively press the
function key once, then the PARAM section select soft key. (See
Chapter 1, "DISPLAYING PARAMETERS.")
4 Display the page containing the parameter you want to set, and position the cursor on the parameter.
(See Chapter 1, "DISPLAYING PARAMETERS.")
5 Enter data, then press the [INPUT] soft key. The parameter indicated by the cursor is set to the
entered data.

B-64310EN/02 2.SETTING PARAMETERS FROM MDI
- 3 -
Data can be entered continuously for parameters, starting at the selected parameter, by separating
each data item with a semicolon (;).
[Example]
Entering 10;20;30;40 and pressing the INPUT key assigns values 10, 20, 30, and 40 to
parameters in order starting at the parameter indicated by the cursor.
6 Repeat steps (4) and (5) as required.
7 If parameter setting is complete, set "PARAMETER WRITE=" to 0 on the setting screen to disable
further parameter setting.
8 Reset the NC to release the alarm condition (SW0100).
If an alarm condition (PW0000 PLEASE TURN OFF POWER) occurs in the NC, turn it off before
continuing operation.
B-64310EN/02
- 4 -
3. INPUTTING AND OUTPUTTING PARAMETERS
THROUGH THE READER/PUNCHER INTERFACE
3 INPUTTING AND OUTPUTTING
PARAMETERS THROUGH THE
READER/PUNCHER INTERFACE
This section explains the parameter input/output procedures for input/output devices connected to the
reader/puncher interface.
The following description assumes the input/output devices are ready for input/output. It also assumes
parameters peculiar to the input/output devices, such as the baud rate and the number of stop bits, have
been set in advance. (See Section 4.5, “PARAMETERS OF READER/PUNCHER INTERFACE.”)
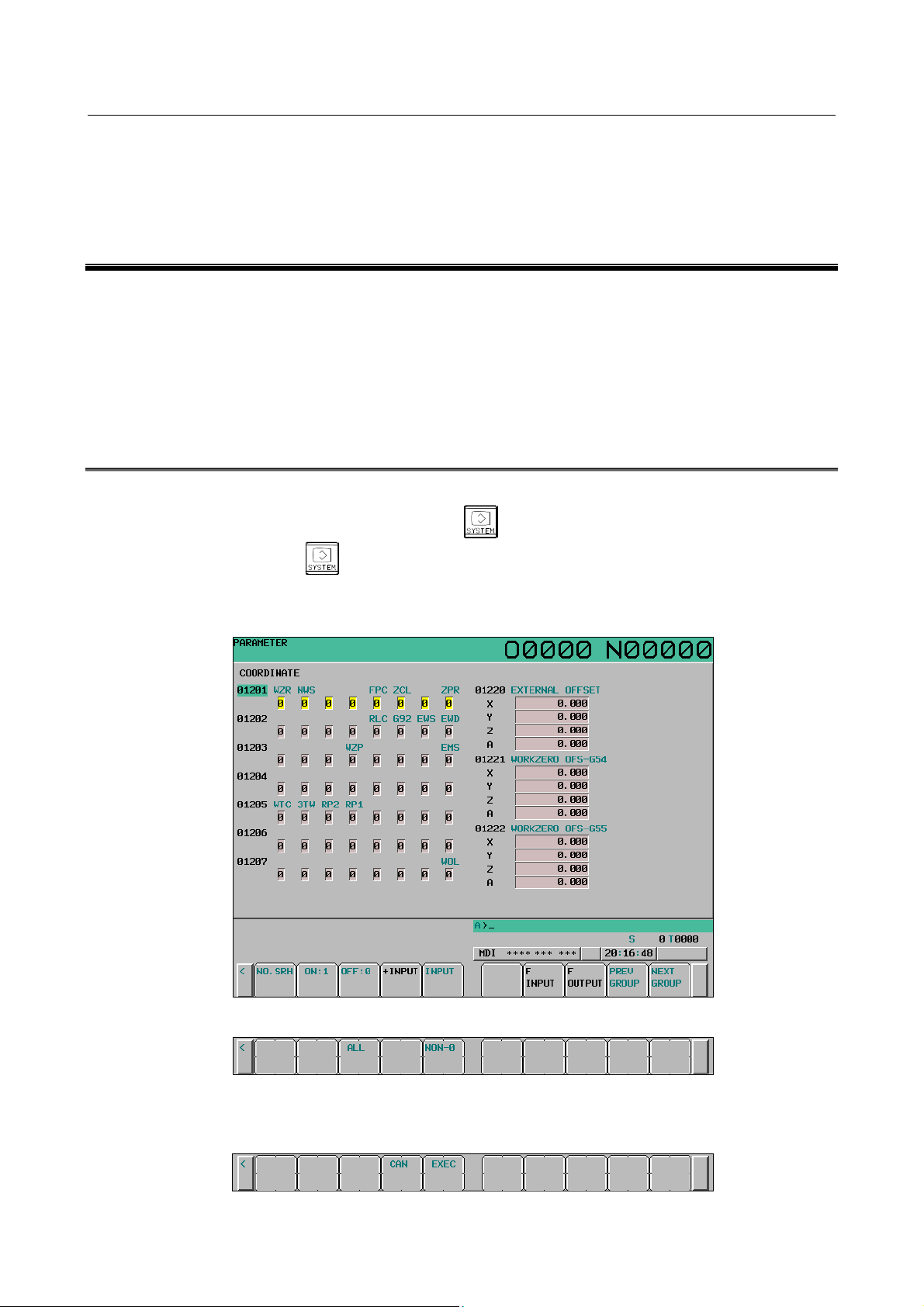
3.1 OUTPUTTING PARAMETERS THROUGH THE
READER/PUNCHER INTERFACE
1 Select the EDIT mode or set to Emergency stop.
2 To select the parameter screen, press the
function key as many times as required, or
alternatively press the
function key once, then the PARAM section select soft key.
3 Press the [(OPRT)] soft key to display operation select soft keys, then press the forward menu key
located at the right-hand side of the soft keys to display another set of operation select keys
including [F OUT].
4 Pressing the [F OUT] soft key changes the soft key display as shown below:
5 The [NON-0] soft key selects outputting of the parameters with a non-zero value. The [ALL] soft
key selects outputting of all parameters. When the [NON-0] soft key or [ALL] soft key is pressed,
the soft keys change as described below.
B-64310EN/02
- 5 -
3.INPUTTING AND OUTPUTTING PARAMETERS
THROUGH THE READER/PUNCHER INTERFACE
6 Press the [EXEC] soft key to start parameter output. When parameters are being output, "OUTPUT"
blinks in the state display field on the lower part of the screen.
7 When parameter output terminates, "OUTPUT" stops blinking. Press the
key to interrupt
parameter output.
3.2 INPUTTING PARAMETERS THROUGH THE
READER/PUNCHER INTERFACE
1 Place the NC in the emergency stop state.
2 Enable parameter writing.
2-1 To display the setting screen, press the
function key as many times as required, or
alternatively press the
function key once, then the [SETING] section select soft key.
The first page of the setting screen appears.
2-2 Position the cursor on "PARAMETER WRITE" using the cursor move keys.
2-3 Press the [(OPRT)] soft key to display operation select soft keys.
2-4 To set "PARAMETER WRITE=" to 1, press the [ON:1] soft key, or alternatively enter 1, then
press the [INPUT] soft key. From now on, parameters can be set.
At the same time an alarm condition (SW0100 PARAMETER WRITE ENABLE) occurs in the
NC.
3 To select the parameter screen, press the
function key as many times as required, or
alternatively press the
key once, then [PARAM] soft key.
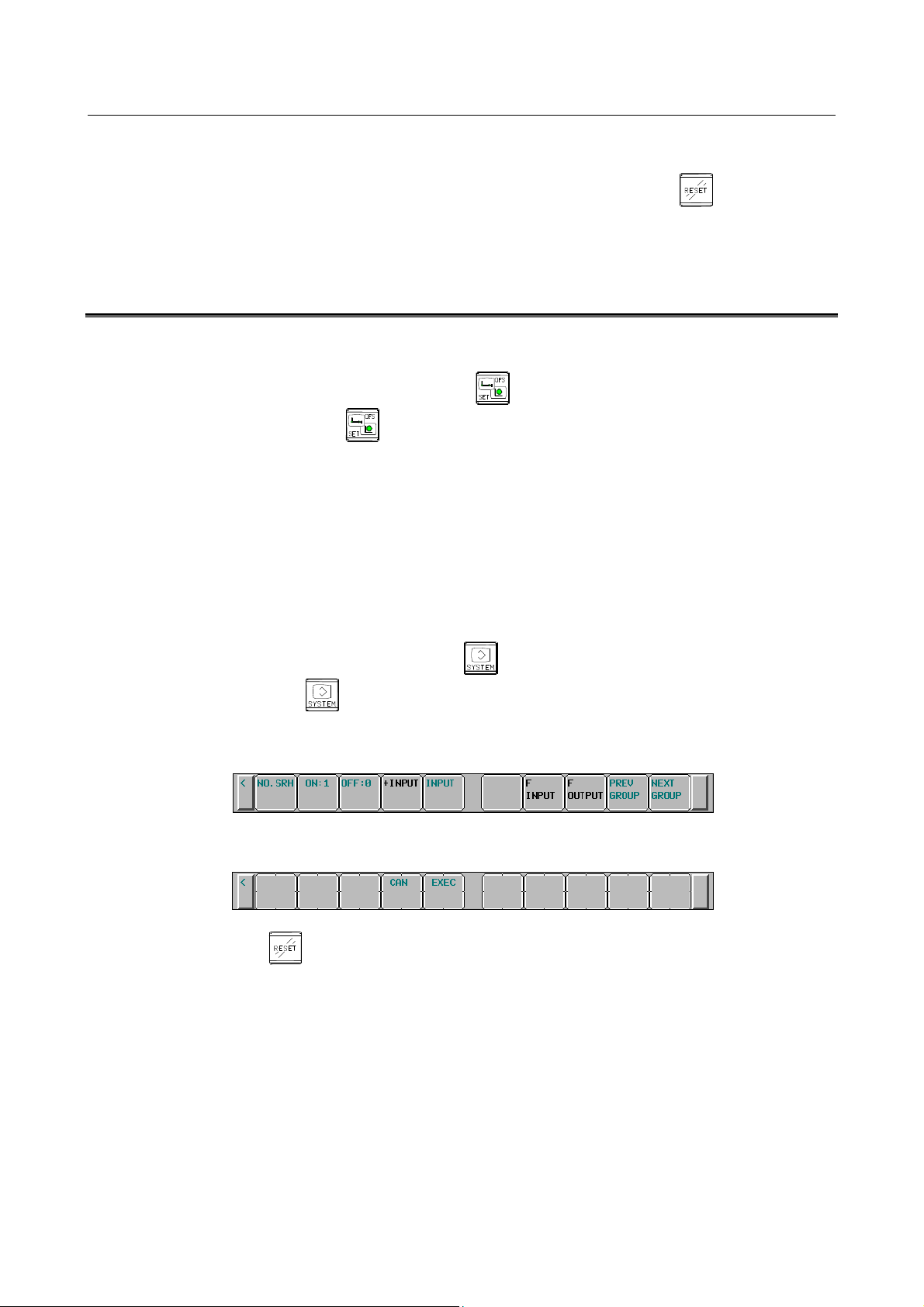
4 Press the [(OPRT)] soft key to display operation select keys, then press the forward menu key
located at the right-hand side of the soft keys to display another set of operation select soft keys
including [F IN].
5 Pressing the [F IN] soft key changes the soft key display as shown below:
6 Press the [EXEC] soft key to start inputting parameters from the input/output device.
When parameters are being input, "INPUT" blinks in the state display field on the lower part of the
screen. Press the
key to interrupt parameter input.
7 When parameter read terminates, "INPUT" stops blinking, and an alarm condition (PW0100) occurs
in the NC. Turn it off before continuing operation.
B-64310EN/02
- 6 -
3. INPUTTING AND OUTPUTTING PARAMETERS
THROUGH THE READER/PUNCHER INTERFACE
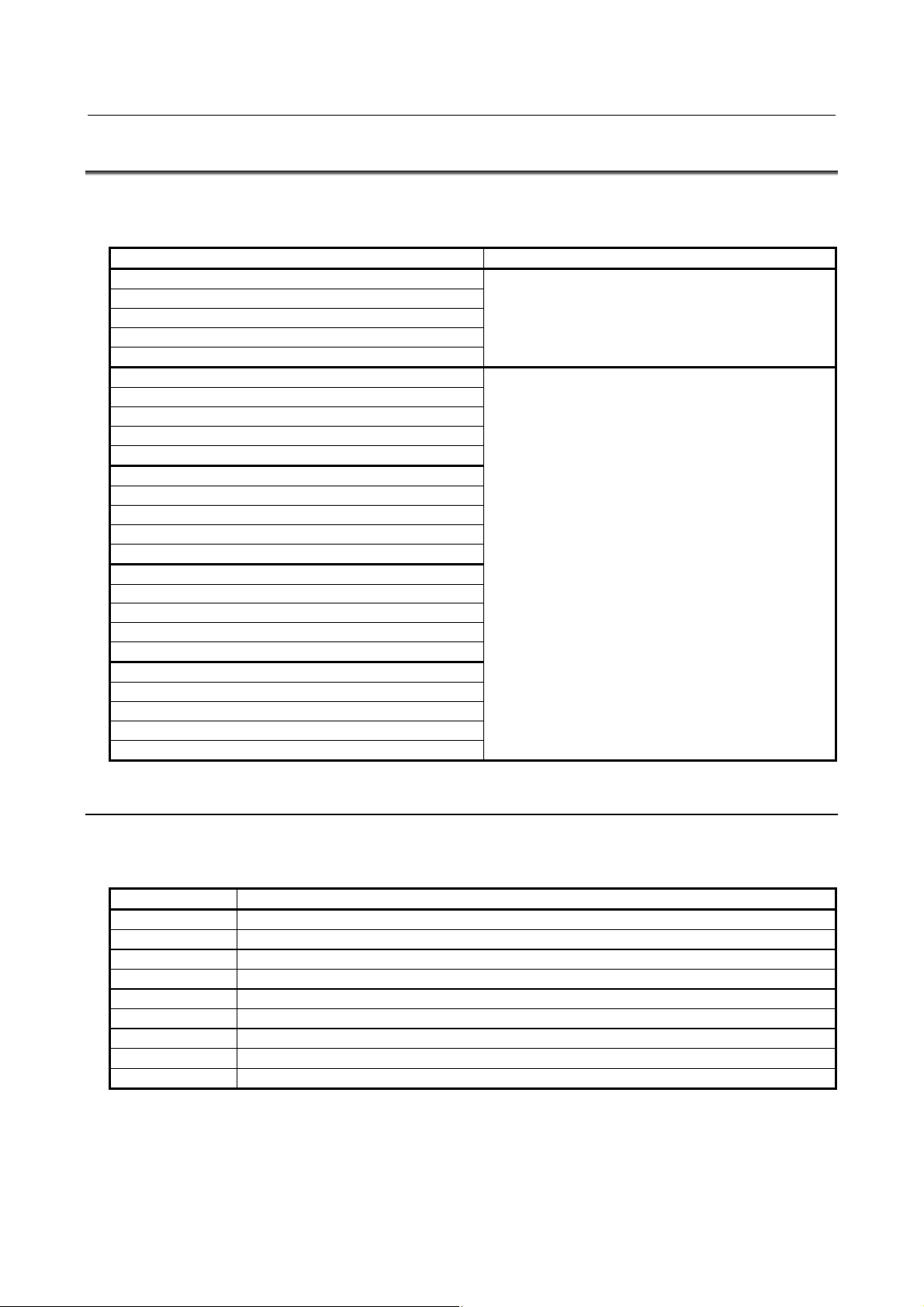
3.3 I/O FORMATS
This section describes the I/O formats of parameters.
Parameters are classified by data format as follows:
Data format Remarks
Bit
Bit machine group
Bit path
Bit axis
Bit spindle
Data of these formats is represented by an 8-digit
binary number, with each digit corresponding to a bit.
Byte
Byte machine group
Byte path
Byte axis
Byte spindle
Word
Word machine group
Word path
Word axis
Word spindle
2-word
2-word machine group
2-word path
2-word axis
2-word spindle
Real
Real machine group
Real path
Real axis
Real spindle
The setting range of data varies from one parameter
to another.
For details, refer to the description of each parameter.
3.3.1 Keywords
The alphabetic characters listed below are used as keywords.
A numeric value after each keyword has the following meaning:
Keyword Meaning of a numeric value that follows
N Parameter number
Q Data identifier (1: Parameter data, 0: Pitch error compensation data)
T
Machine group number (1) of a machine group type parameter
L
Path number (1 to number of controlled paths) of a path type parameter
A Controlled axis number (1 to number of controlled axes) of an axis type parameter
S Spindle number (1 to number of controlled spindles) of a spindle type parameter
P Value of a parameter independent of inch/metric switching
M Metric input value of a parameter dependent on inch/metric switching
I Inch input value of a parameter dependent on inch/metric switching
B-64310EN/02
- 7 -
3.INPUTTING AND OUTPUTTING PARAMETERS
THROUGH THE READER/PUNCHER INTERFACE
3.3.2 Inch/Metric Switching
For parameters dependent on inch/metric switching such as those for length and feedrate, whether data is
inch data or metric data is specified by the input mode in the case of input from the MDI panel, or by the
keyword I or M prefixed to the data in the case of input from an external I/O device. The keyword I or M
is added also when data is output from an external I/O device.
If the input mode or keyword differs from the actually used mode as in a case where data input in the inch
mode is used in the metric mode, the CNC performs automatic data conversion. So, data need not be
converted according to a mode change. Moreover, when parameter data is displayed, the data is converted
according to the display mode. However, when data is output from an external I/O device, the original
data is output according to the original keyword.
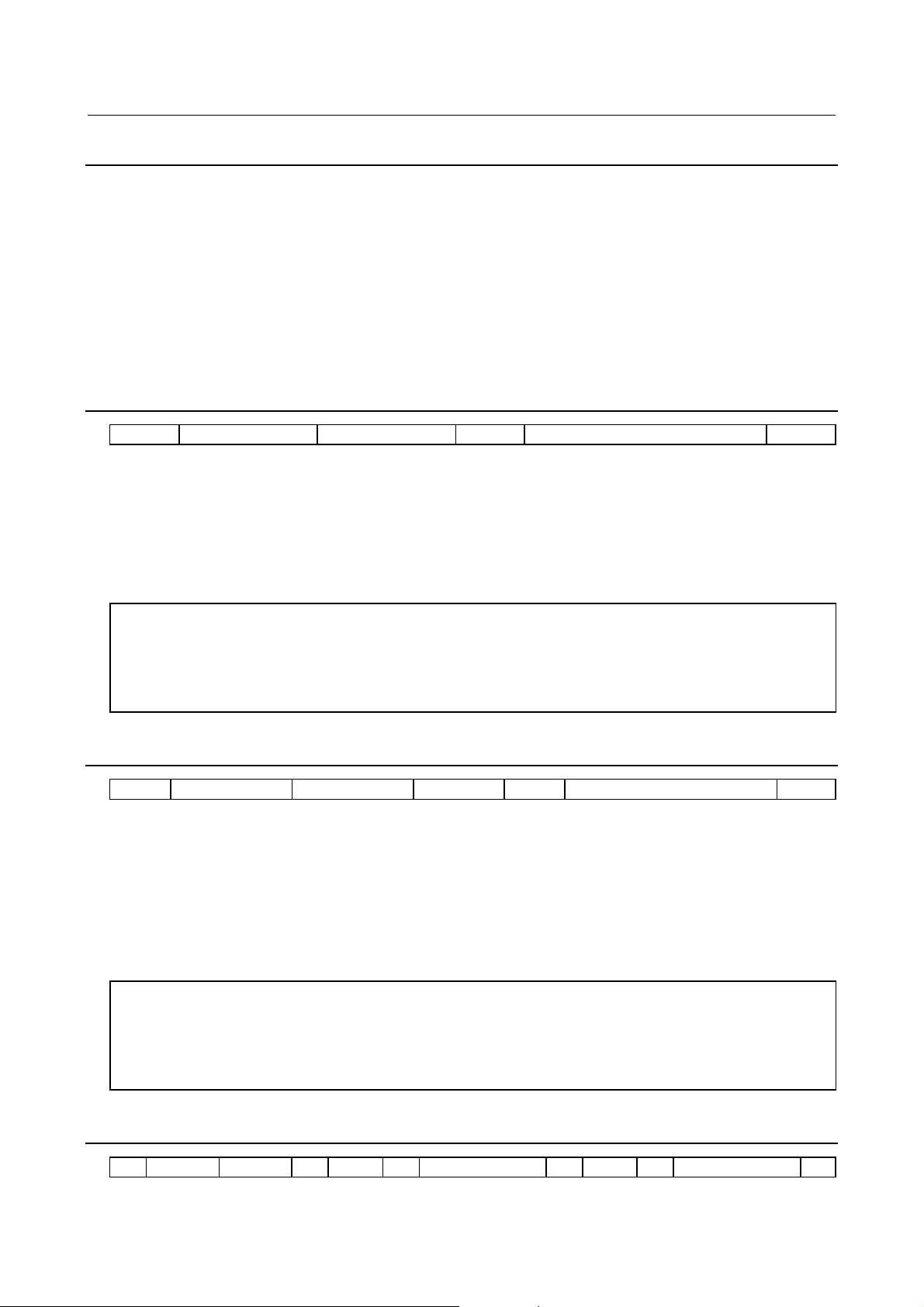
3.3.3 Bit Format
N ***** Q1 P ******** ;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
An 8-digit binary number after P represents the bit values (0/1) of a parameter, with the first digit
corresponding to bit 0 and the eighth digit corresponding to bit 7.
Leading zeros may not be omitted.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N00010Q1P00000001;
Parameter No. 10
Parameter value
Bit 0 is set to 1, and the other bits are set to 0.
3.3.4 Bit Machine Group Format
N ***** Q1 T1 P ******** ;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
T1 indicates the 1st machine group (for the 0i-D/0i Mate-D, the 1st machine group is always assumed).
The 8-digit binary number that follows P includes the bit values (0 or 1) of the parameter in the 1st
machine group; the first bit corresponds to bit 0 and the eighth bit to bit 7.
Leading zeros may not be omitted.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N01005Q1T1P10000001;
Parameter No. 1005
Parameter value
1st machine group: Bits 0 and 7 are set to 1, and the other bits are set to 0.
3.3.5 Bit Path Format
N ***** Q1 L * P ******** L * P ******** ;
A numeric value after N represents a parameter number.
B-64310EN/02
- 8 -
3. INPUTTING AND OUTPUTTING PARAMETERS
THROUGH THE READER/PUNCHER INTERFACE
Q1 indicates that the data is parameter data.
A numeric value after L represents a path number (1 to number of controlled paths).
An 8-digit binary number after P represents the bit values (0/1) of a parameter for each path, with the first
digit corresponding to bit 0 and the eighth digit corresponding to bit 7.
Leading zeros may not be omitted.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N01005Q1L1P10000001L2P10000001;
Parameter No. 1005
Parameter value
Path 1: Bits 0 and 7 are set to 1, and the other bits are set to 0.
Path 2: Bits 0 and 7 are set to 1, and the other bits are set to 0.
3.3.6 Bit Axis Format
N ***** Q1 A * P ******** A * P ********
・ ・ ・
;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after A represents a controlled axis number (1 to number of controlled axes).
An 8-digit binary number after P represents the bit values (0/1) of a parameter for each controlled axis,
with the first digit corresponding to bit 0 and the eighth digit corresponding to bit 7.
Leading zeros may not be omitted.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N01005Q1A1P10000001A2P10000001A3P10000001.......;
Parameter No. 1005
Parameter value
1st axis: Bits 0 and 7 are set to 1, and the other bits are set to 0.
2nd axis: Bits 0 and 7 are set to 1, and the other bits are set to 0.
3rd axis: Bits 0 and 7 are set to 1, and the other bits are set to 0.
▪
3.3.7 Bit Spindle Format
N ***** Q1 S * P ******** S * P ********
・ ・ ・
;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after S represents a spindle number (1 to number of controlled spindles).
An 8-digit binary number after P represents the bit values (0/1) of a parameter for each spindle, with the
first digit corresponding to bit 0 and the eighth digit corresponding to bit 7.
Leading zeros may not be omitted.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
B-64310EN/02
- 9 -
3.INPUTTING AND OUTPUTTING PARAMETERS
THROUGH THE READER/PUNCHER INTERFACE
Example
N05603Q1S1P00001000S2P00001000S3P00000000;
Parameter No. 5603
Parameter value
1st spindle: Bit 3 is set to 1, and the other bits are set to 0.
2nd spindle: Bit 3 is set to 1, and the other bits are set to 0.
3rd spindle: All bits are set to 0.
3.3.8 Byte/Word/Two-Word Format
N ***** Q1 P ******** ;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after P represents a parameter value (integer).
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N00100Q1P31515;
Parameter No. 100
Parameter value 31515
3.3.9 Byte/Word/Two-Word Machine Group Format
N ***** Q1 T1 P ****** ;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
T1 indicates the 1st machine group (for the 0i-D/0i Mate-D, the 1st machine group is always assumed).
The value that follows P indicates the value (integer) of the parameter in 1st machine group.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N01020Q1T1P88;
Parameter No. 1020
Parameter value 1st machine group: 88
3.3.10 Byte/Word/Two-Word Path Format
N ***** Q1 L * P ****** L * P ****** ;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after L represents a path number (1 to number of controlled paths).
A numeric value after P represents the value (integer) of a parameter for each path.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
B-64310EN/02
- 10 -
3. INPUTTING AND OUTPUTTING PARAMETERS
THROUGH THE READER/PUNCHER INTERFACE
Example
N01020Q1L1P88L2P89;
Parameter No. 1020
Parameter value Path 1: 88
Path 2: 89
3.3.11 Byte/Word/Two-Word Axis Format
N ***** Q1 A * P ****** A * P ******
・ ・ ・
;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after A represents a controlled axis number (1 to number of controlled axes).
A numeric value after P represents the value (integer) of a parameter for each controlled axis.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N01020Q1A1P88A2P89A3P90A4P66......;
Parameter No. 1020
Parameter value 1st axis: 88
2nd axis: 89
3rd axis: 90
4th axis: 66
▪
3.3.12 Byte/Word/Two-Word Spindle Format
N ***** Q1 S * P ****** S * P ******
・ ・ ・
;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after S represents a spindle number (1 and up).
A numeric value after P represents the value (integer) of a parameter for each spindle.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N05680Q1S1P19S2P19S3P0;
Parameter No. 5680
Parameter value 1st spindle: 19
2nd spindle: 19
3rd spindle: 0
3.3.13 Real Number Format
N ***** Q1 P ****** ;
N ***** Q1 M ****** ;
N ***** Q1 I ****** ;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
B-64310EN/02
- 11 -
3.INPUTTING AND OUTPUTTING PARAMETERS
THROUGH THE READER/PUNCHER INTERFACE
A numeric value after each of P, M, and I represents the value (real number) of a parameter.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N01451Q1P5000.0;
Parameter No. 1451
Parameter value 5000.0
3.3.14 Real Number Machine Group Format
N ***** Q1 T1 P ****** ;
N ***** Q1 T1 M ****** ;
N ***** Q1 T1 I ****** ;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
T1 indicates the 1st machine group (for the 0i-D/0i Mate-D, the 1st machine group is always assumed).
The value that follows P, M, or I indicates the value (real number) of the parameter in 1st machine group.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N01220Q1T1M50.0;
Parameter No. 1220
Parameter value 1st machine group: 50.0
3.3.15 Real Number Path Format
N ***** Q1 L * P ****** L * P ****** ;
N ***** Q1 L * M ****** L * M ****** ;
N ***** Q1 L * I ****** L * I ****** ;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after L represents a path number (1 to number of controlled paths).
A numeric value after each of P, M, and I represents the value (real number) of a parameter for each path.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N01220Q1L1M50.0L2M60.0;
Parameter No. 1220
Parameter value Path 1: 50.0
Path 2: 60.0
B-64310EN/02
- 12 -
3. INPUTTING AND OUTPUTTING PARAMETERS
THROUGH THE READER/PUNCHER INTERFACE
3.3.16 Real Number Axis Format
N ***** Q1 A * P ****** A * P ******
・ ・ ・
;
N ***** Q1 A * M ****** A * M ******
・ ・ ・
;
N ***** Q1 A * I ****** A * I ******
・ ・ ・
;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after A represents a controlled axis number (1 to number of controlled axes).
A numeric value after each of P, M, and I represents the value (real number) of a parameter for each
controlled axis.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N01220Q1A1M50.0A2M60.0A3M70.0A4M0.0A5M0.0 ........;
Parameter No. 1220
Parameter value 1st axis: 50.0
2nd axis: 60.0
3rd axis: 70.0
4th axis: 0.0
5th axis: 0.0
3.3.17 Real Number Spindle Format
N ***** Q1 S * P ****** S * P ******
・ ・ ・
;
N ***** Q1 S * M ****** S * M ******
・ ・ ・
;
N ***** Q1 S * I ****** S * I ******
・ ・ ・
;
A numeric value after N represents a parameter number.
Q1 indicates that the data is parameter data.
A numeric value after S represents a spindle number (1 to number of controlled spindles).
A numeric value after each of P, M, and I represents the value (real number) of a parameter for each
spindle.
A semicolon (;) marks the end of a block. (LF is used for the ISO code, and CR is used for the EIA code.)
Example
N05898Q1S1P30.0S2P30.0S3P0.0;
Parameter No. 5898
Parameter value 1st spindle: 30.0
2nd spindle: 30.0
3rd spindle: 0.0
B-64310EN/02
- 13 -
3.INPUTTING AND OUTPUTTING PARAMETERS
THROUGH THE READER/PUNCHER INTERFACE
3.3.18 Start and End of a Record
A parameter record starts with "%" and ends with "%".
Example
%; ......................................... Start of record
N00000Q1P00001100;
N00002Q1P00000000;
▪
▪
N09162Q1P00000000;
N09163Q1P00000000;
% .......................................... End of record
When parameters and pitch error compensation data are included in a single file, the file starts with "%"
and ends with "%".
4.DESCRIPTION OF PARAMETERS B-64310EN/02
- 14 -
4 DESCRIPTION OF PARAMETERS
4.1 DATA TYPE
Parameters are classified by data type as follows:
Data type Valid data range Remarks
Bit
Bit machine group
Bit path
Bit axis
Bit spindle
0 or 1
Byte
Byte machine group
Byte path
Byte axis
Byte spindle
-128 to 127
0 to 255
Some parameters handle these types of
data as unsigned data.
Word
Word machine group
Word path
Word axis
Word spindle
-32768 to 32767
0 to 65535
Some parameters handle these types of
data as unsigned data.
2-word
2-word machine group
2-word path
2-word axis
2-word spindle
0 to ±999999999
Some parameters handle these types of
data as unsigned data.
Real
Real machine group
Real path
Real axis
Real spindle
See the Standard Parameter
Setting Tables.
NOTE
1 Each of the parameters of the bit, bit machine group, bit path, bit axis, and bit
spindle types consists of 8 bits for one data number (parameters with eight
different meanings).
2 For machine group types, the parameters corresponding to the maximum
number of machine groups are present, so that independent data can be set for
each machine group. For the 0
i
-D/0
i
Mate-D, the maximum number of
machine groups is always 1.
3 For path types, parameters corresponding to the maximum number of paths are
present, so that independent data can be set for each path.
4 For axis types, parameters corresponding to the maximum number of control
axes are present, so that independent data can be set for each control axis.
5 For spindle types, parameters corresponding to the maximum number of
spindles are present, so that independent data can be set for each spindle axis.
6 The valid data range for each data type indicates a general range. The range
varies according to the parameters. For the valid data range of a specific
parameter, see the explanation of the parameter.
B-64310EN/02 4.DESCRIPTION OF PARAMETERS
- 15 -
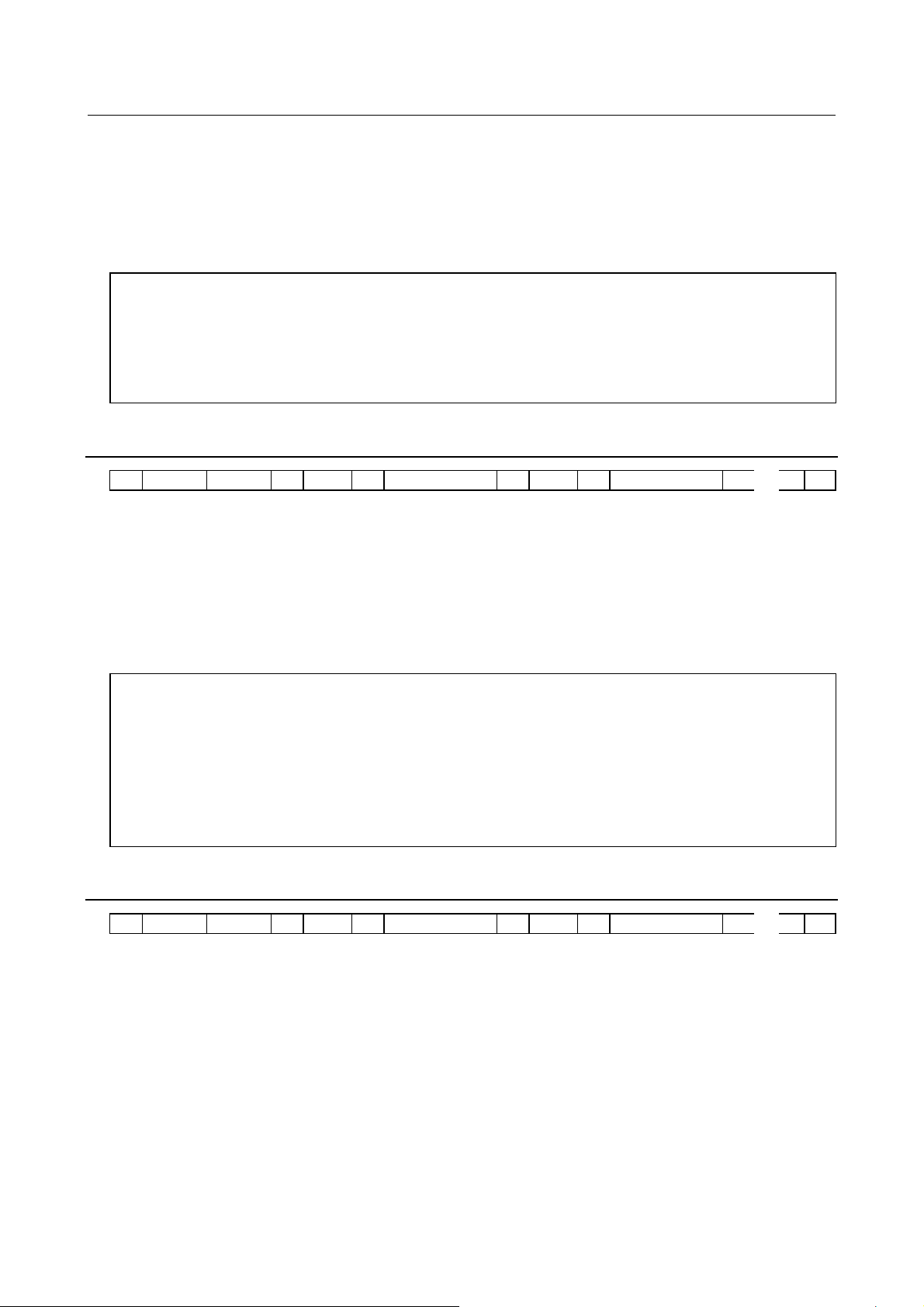
4.2 REPRESENTATION OF PARAMETERS
Parameters of the bit type, bit machine group type, bit path type, bit axis type,
and bit spindle type
#7 #6 #5 #4 #3 #2 #1 #0
0000 EIA NCR ISP CTV TVC
Parameters other than the bit-type parameters above
1023 Number of the servo axis for each axis
NOTE
1 There are bits that are indicated as a blank or parameters whose numbers are
displayed on the screen but not shown in the list in Chapter 4. "DESCRIPTION
OF PARAMETERS". Basically, set these parameters to 0.
2 Parameters that are valid only for either the lathe system (T series) or the
machining center system (M series) are indicated in two rows as shown in the
following examples. When a row is blank, the parameter is not usable with the
corresponding series. Basically, set these parameters to 0.
[Example 1]
Parameter HTG is a parameter common to the M and T series, but
Parameters RTV and ROC are parameters valid only for the T series.
1403
RTV
ROC
HTG
HTG
T series
M series
#7 #6
#5 #4 #3 #2 #1 #0
[Example 2]
The following parameter is provided only for the M series.
1411
Cutting feedrate
T series
M series
3 When "to" is inserted between two parameter numbers, there are parameters
with successive numbers between the two starting and ending parameter
numbers, but those intermediate parameter numbers are omitted for
convenience.
4 The lower-case letter "x" or "s" following the name of a bit-type parameter
indicates the following:
- ” x” : Bit axis type parameters
- ” s” : Bit spindle type parameters
Data No. Data
(
Data #0 to #7 are bit
p
ositions.
)
Data No. Data
4.DESCRIPTION OF PARAMETERS B-64310EN/02
- 16 -
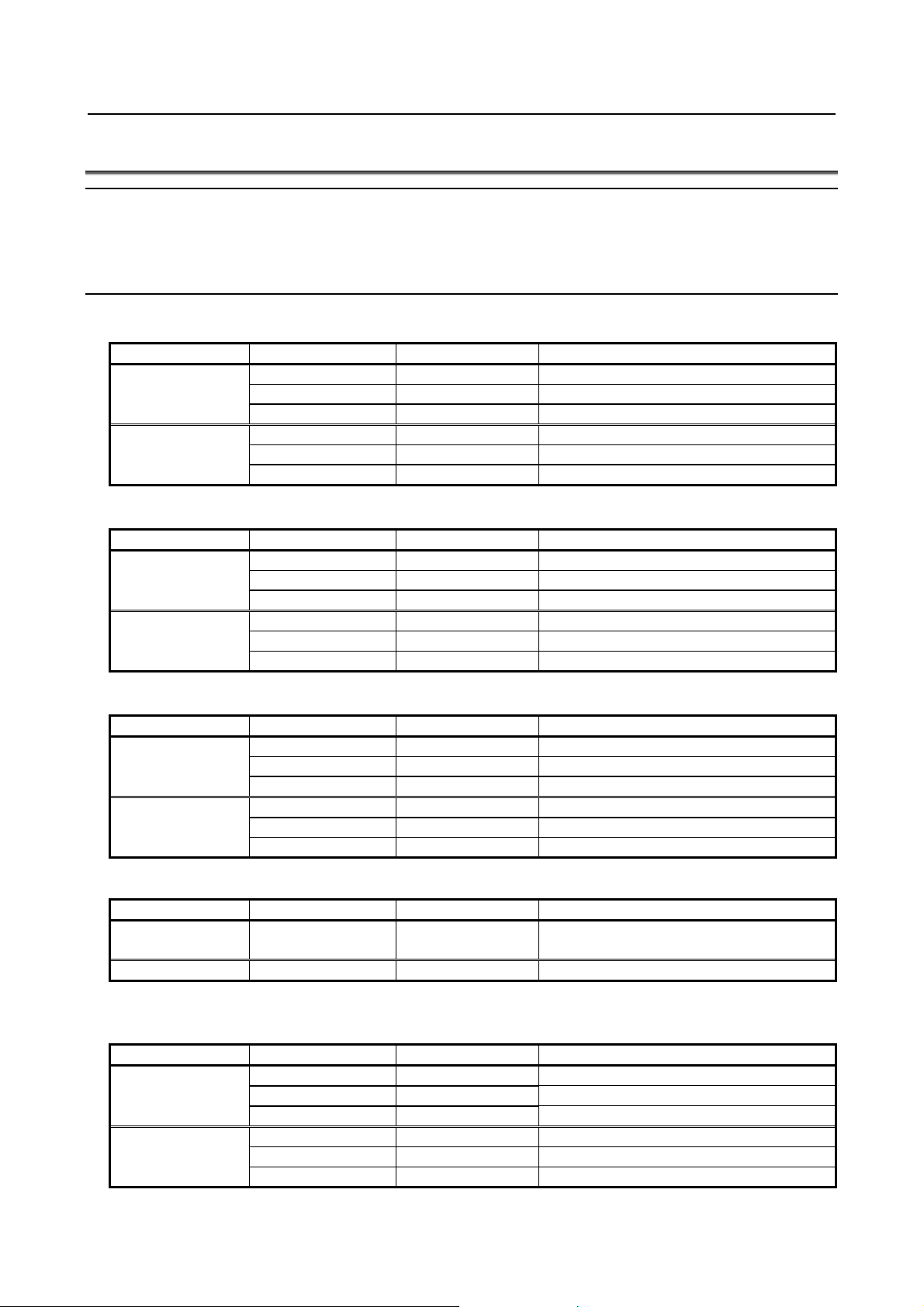
4.3 STANDARD PARAMETER SETTING TABLES
Overview
This section defines the standard minimum data units and valid data ranges of the CNC parameters of the
real type, real machine group type, real path type, real axis type, and real spindle type. The data type and
unit of data of each parameter conform to the specifications of each function.
Explanation
(A) Length and angle parameters (type 1)
Unit of data Increment system Minimum data unit Valid data range
IS-A 0.01 -999999.99 to +999999.99
IS-B 0.001 -999999.999 to +999999.999
mm
deg.
IS-C 0.0001 -99999.9999 to +99999.9999
IS-A 0.001 -99999.999 to +99999.999
IS-B 0.0001 -99999.9999 to +99999.9999
inch
IS-C 0.00001 -9999.99999 to +9999.99999
(B) Length and angle parameters (type 2)
Unit of data Increment system Minimum data unit Valid data range
IS-A 0.01 0.00 to +999999.99
IS-B 0.001 0.000 to +999999.999
mm
deg.
IS-C 0.0001 0.0000 to +99999.9999
IS-A 0.001 0.000 to +99999.999
IS-B 0.0001 0.0000 to +99999.9999
inch
IS-C 0.00001 0.00000 to +9999.99999
(C) Velocity and angular velocity parameters
Unit of data Increment system Minimum data unit Valid data range
IS-A 0.01 0.0 to +999000.00
IS-B 0.001 0.0 to +999000.000
mm/min
degree/min
IS-C 0.0001 0.0 to +99999.9999
IS-A 0.001 0.0 to +96000.000
IS-B 0.0001 0.0 to +9600.0000
inch/min
IS-C 0.00001 0.0 to +4000.00000
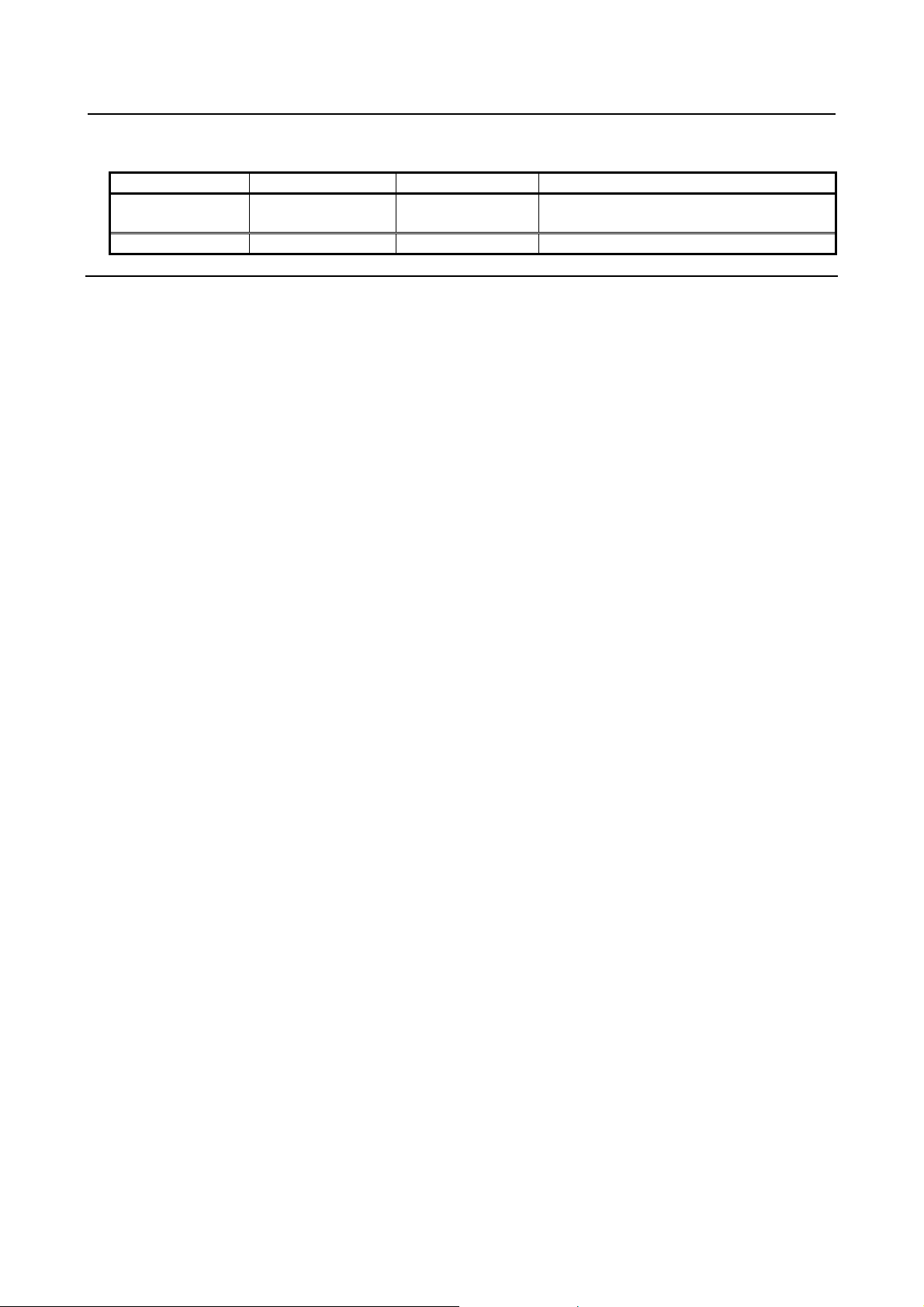
If bit 7 (IESP) of parameter No. 1013 is set to 1, the valid data ranges for IS-C are extended as follows:
Unit of data Increment system Minimum data unit Valid data range
mm/min
degree/min
IS-C 0.001 0.000 to +999000.000
inch/min IS-C 0.0001 0.0000 to +9600.0000
(D)Acceleration and angular acceleration parameters
Unit of data Increment system Minimum data unit Valid data range
IS-A 0.01 0.00 to +999999.99
IS-B 0.001 0.000 to +999999.999
mm/sec
2
deg./sec
2
IS-C 0.0001 0.0000 to +99999.9999
IS-A 0.001 0.000 to +99999.999
IS-B 0.0001 0.0000 to +99999.9999
inch/sec
2
IS-C 0.00001 0.00000 to +9999.99999
B-64310EN/02 4.DESCRIPTION OF PARAMETERS
- 17 -
If bit 7 (IESP) of parameter No. 1013 is set to 1, the valid data ranges for IS-C are extended as follows:
Unit of data Increment system Minimum data unit Valid data range
mm/min
degree/min
IS-C
0.001 0.000 to +999999.999
inch/min IS-C 0.0001 0.0000 to +99999.9999
Notes
(1) Values are rounded up or down to the nearest multiples of the minimum data unit.
(2) A valid data range means data input limits, and may differ from values representing actual
performance.
(3) For information on the ranges of commands to the CNC, refer to Appendix D, "LIST OF
COMMAND RANGES," in the "OPERATOR’S MANUAL" (B-64304EN).
4.DESCRIPTION OF PARAMETERS B-64310EN/02
- 18 -
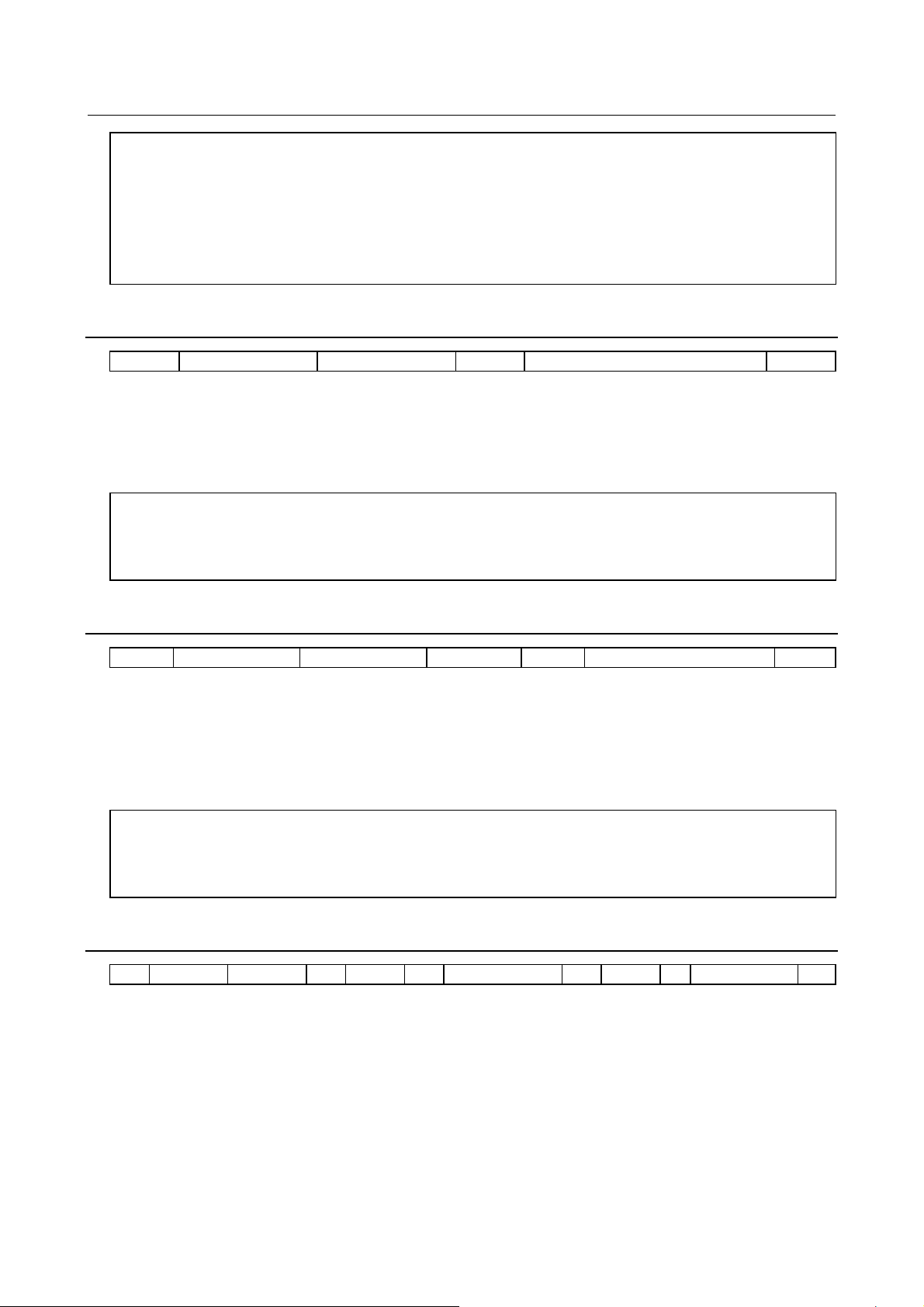
4.4 PARAMETERS OF SETTING
#7 #6 #5 #4 #3 #2 #1 #0
0000 SEQ INI ISO TVC
[Input type] Setting input
[Data type] Bit path
#0 TVC TV check
0: Not performed
1: Performed
#1 ISO Code used for data output
0: EIA code
1: ISO code
NOTE
1 The I/O setting of a memory card is made by bit 0 (ISO) of
parameter No. 0139.
2 The I/O setting of data server is made by bit 0 (ISO) of parameter
No. 0908.
#2 INI Unit of input
0: In metrics
1: In inches
#5 SEQ Automatic insertion of sequence numbers
0: Not performed
1: Performed
#7 #6 #5 #4 #3 #2 #1 #0
0001 FCV
[Input type] Setting input
[Data type] Bit path
#1 FCV Program format
0: Series 0 standard format
(This format is compliant with the Series 0i-C.)
1: Series 10/11 format
NOTE
1 Programs created in the Series 10/11 program format can be used
for operation on the following functions:
1 Subprogram call M98,M198
2 Thread cutting with equal leads G32 (T series)
3 Canned cycle G90, G92, G94 (T series)
4 Multiple repetitive canned cycle G71 to G76 (T series)
5 Drilling canned cycle
G80 to G89 (T series)
G73, G74, G76, G80 to G89(M series)
B-64310EN/02 4.DESCRIPTION OF PARAMETERS
- 19 -
NOTE
2 When the program format used in the Series 10/11 is used for this
CNC, some limits may add. Refer to the OPERATOR’S MANUAL.
#7 #6 #5 #4 #3 #2 #1 #0
0002 SJZ
[Input type] Setting input
[Data type] Bit
#7 SJZ On an axis for which bit 3 (HJZx) of parameter No. 1005 is set:
0: If a reference position is not established yet, reference position return is performed
with deceleration dogs.
If a reference position is already established, reference position return is performed
at a parameter-set feedrate without using deceleration dogs.
1: Reference position return is performed with deceleration dogs at all times.
NOTE
SJZ is valid for an axis for which bit 3 (HJZx) of parameter No.
1005 is set to 1. When bit 1 (DLZx) of parameter No. 1005 is set to
1, however, manual reference position return after a reference
position is set is performed at a parameter-set feedrate, regardless
of the setting of SJZ.
#7 #6 #5 #4 #3 #2 #1 #0
0010 PEC PRM PZS
[Input type] Setting input
[Data type] Bit path
#0 PZS When a part program is punched out, the O number is:
0: Not zero-suppressed.
1: Zero-suppressed.
#1 PRM Whether the parameter whose setting is 0 is output or not:
0: It is selected with soft key [ALL] or [NON-0].
1: It is not selected with soft key [ALL] or [NON-0]. The parameter whose setting is 0
is not output.
#2 PEC When pitch error compensation data is output, the data whose value is 0 is:
0: Output.
1: Not output.
#7 #6 #5 #4 #3 #2 #1 #0
0012 RMVx MIRx
[Input type] Setting input
[Data type] Bit axis
#0 MIRx Mirror image for each axis
0: Mirror image is off. (Normal)
1: Mirror image is on. (Mirror)
4.DESCRIPTION OF PARAMETERS B-64310EN/02
- 20 -
#7 RMVx Releasing the assignment of the control axis for each axis
0: Not released
1: Released
(Equivalent to the control axis detachment signals DTCH1, DTCH2, and so forth)
NOTE
RMVx is valid when bit 7 (RMBx) of parameter No. 1005 is set to 1.
4.5 PARAMETERS OF READER/PUNCHER INTERFACE
To transfer data (programs, parameters, and so forth) to and from an external input/output
device through the I/O device interface (RS-232-C serial interface), the parameters
described below need to be set.
The input/output device connected to a channel (such as RS-232-C serial port 1 and
RS-232-C serial port 2) can be selected by setting I/O CHANNEL (parameter No. 0020).
The specifications (input/output specification number, baud rate, and the number of stop
bits) of an input/output device connected to each channel must be set in the parameters
corresponding to each channel beforehand.
For channel 1, two combinations of parameters to specify the input/output device data are
provided.
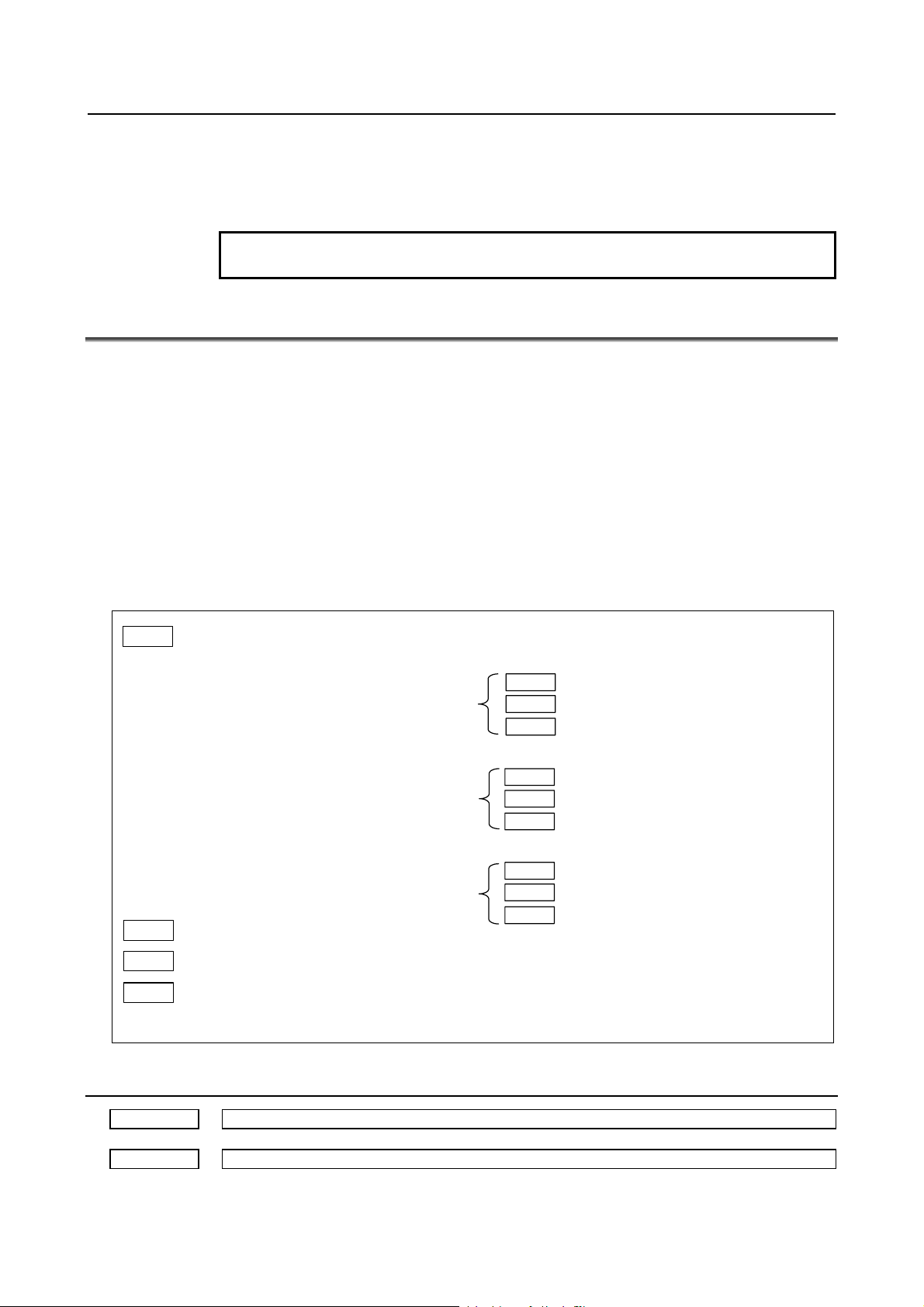
The following shows the interrelation between the input/output device interface
parameters for the channels.
I/O CHANNEL
or foreground input
Set channels to be used
for data input/output.
I/O CHANNEL (0 to 9)
=0 : Channel 1
=1 : Channel 1
=2 : Channel 2
=3 : Channel 3
:
:
:
Input/output to and from the memory card
interface, etc. is also possible.
When IO4 is set
Foreground output
Background input
Background input
The channel setting is the same as No.0020.
Input/output channel number (parameter No.0020)
↓
0101 Stop bit and other data
I/O CHANNEL=0 0102 Number specified for the input/output device
0103 Baud rate
0111 Stop bit and other data
I/O CHANNEL=1 0112 Number specified for the input/output device
0113 Baud rate
0121 Stop bit and other data
I/O CHANNEL=2 0122 Number specified for the input/output device
0123 Baud rate
:
:
:
I/O CHANNEL=9
(Channel 1)
(Channel 1)
(Channel 2)
0020
0021
0022
0023
4.5.1 Parameters Common to All Channels
0020 I/O CHANNEL : Input/output device selection, or interface number for a foreground input device
0021 Foreground output device setting
Loading...