



Product Bulletin
61.8:1078
D101339X012
January 2009
1078 Manual Actuator
Fisherr 1078 Declutchable Manual Actuator
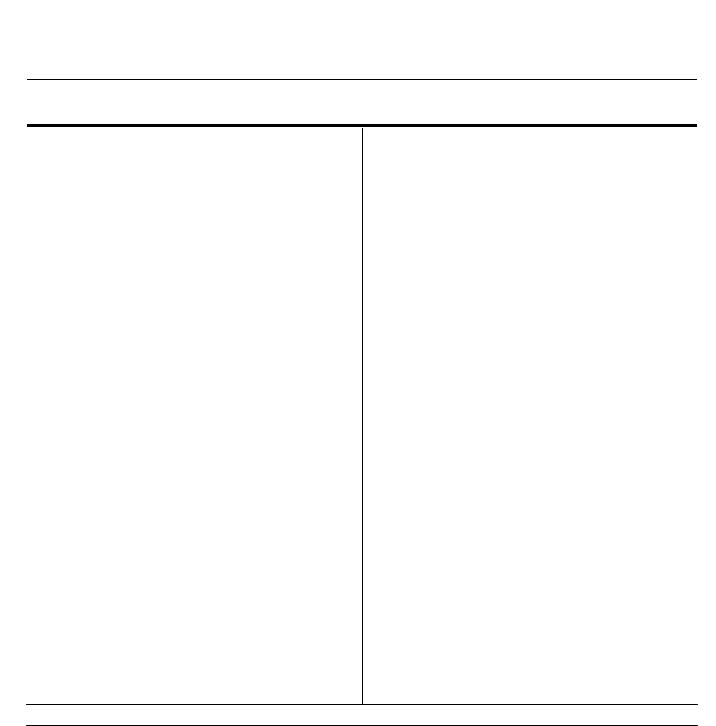
Fisherr 1078 manual actuators, figures 1 and 2, are declutchable actuators for manual operation of control valves and equipment that use power actuators. The 1078 manual actuator mounts directly to Fisher 1051 sizes 33, 40, and 60; 1052 sizes 33, 40, 60, and 70; 1061 sizes 30, 40, 60, 68, 80, and 100; and to all sizes of 1066 and 1066SR actuators.
For 1051 size 33, 1052 size 33, 1066, and 1066SR actuators, coupling to the power actuator is via a flatted shaft installed in the lever or hub. The dimensions of these shafts are the same as those used with H mounting adaptations. The stub shaft fits into a square broach in the manual actuator sector, and spacers secure the shaft in the appropriate position.
W6244−1/IL |
W6283/IL |
Figure 1. Fisherr 1078 Declutchable Manual Actuator |
Figure 2. Fisherr 1078 Declutchable Manual Actuator |
Mounted on a 1052 Size 33 Actuator |
Mounted on a 1052 Size 40 Actuator and V500 Valve |
(Standard Construction) |
(Optional Construction) |
www.Fisher.com
1078 Manual Actuator
Product Bulletin
61.8:1078
January 2009
Specifications
Available Configurations
Direct and reverse acting; see Handwheel Rotation and the Ordering Information section, (Standard construction is with the handwheel shaft pointing down away from the power actuator as shown in figure 1)
Manual Actuator Sizes
See tables 1, 2, 3 and 4
See figures 4 and 5 for dimensions
Coupling Shaft Diameters
See tables 1, 2, 3 and 4
Power Actuator Compatibility
See tables 1, 2, 3 and 4
Maximum Torque Output
See tables 1, 2, 3 and 4
Wheel-Rim Force
See tables 1, 2, 3 and 4
Handwheel Rotation
Clockwise handwheel rotation closes the valve. Direct-acting units produce output rotation matching input rotation; reverse-acting units produce output rotation opposite input rotation.
Construction Materials
Housing and Cover: Cast iron
Drive Sleeve/Gear (Sector): Aluminum/bronze
Worm Gear: Heat-treated steel
Input Shaft and Eccentric: Low-carbon steel
Pin Detent: 300 Series stainless steel
Handwheel or Input Shaft Bearings: Bronze
Standard Mounting Positions
J 1051 (size 33) or 1052 (size 33): Handwheel down (see figure 1)
J 1051 (size 40 and 60) (see figure 2) or 1052 (size 40, 60, and 70)(1): Handwheel down (std) or handwheel right-hand or left-hand mount
(optional)
J 1061 (sizes 30, 40, 60, 68, 80, and 100)(1): Handwheel down (std) or handwheel right-hand or left-hand mount (optional)
J 1066 or 1066SR: Handwheel to left (see figure 3) or, with a 67AFR, handwheel down
Approximate Weight Without Handwheel
Size AAA: 2.7 kg (6 pounds)
Size AA: 6.8 kg (15 pounds)
Size A: 9.5 kg (21 pounds)
Size 2A: 13.6 kg (30 pounds)
Size 1A: 15.9 kg (35 pounds)
Size B: 23.1 kg (51 pounds)
Size C: 29.9 kg (66 pounds)
Size D: 63.5 kg (140 pounds)
Size II-FA: 81.6 kg (180 pounds)
Handwheel Weight
6-inch: 1.8 kg (4 pounds)
8-inch: 2.3 kg (5 pounds)
12-inch: 3.2 kg (7 pounds)
16-inch: 6.8 kg (15 pounds)
24-inch: 5.4 kg (12 pounds)
30-inch: 6.4 kg (14 pounds)
36-inch: 7.3 kg (16 pounds)
1. If a positioner is used, the right-hand or left-hand mounting option will be limited to the side away from the positioner.
2
Product Bulletin
61.8:1078 January 2009
1078 Manual Actuator
41B0314-A / DOC
Figure 3. Fisherr 1078 Declutchable Manual Actuator Mounted on a 1066 Actuator
Features
D Direct Attachment to the Power
Actuator Direct mounting to the actuator housing simplifies installation and eliminates the need for yokes and other brackets.
D Engage Manual Actuator At Any Point of
Rotation A lever-operated eccentric bearing support on the input shaft allows engagement of the worm gear with the sector at any point of rotation. Because the travel indicator components are mounted on a through shaft, accurate travel
indication is maintained during manual actuator disengagement or engagement.
D Positive Operation The disengagement lever is locked in both the engaged and disengaged positions by a detent mechanism, which must be released before the lever can be moved. This provision reduces the possibility of inadvertent or accidental operation. In addition, stop-pins at the fully engaged and fully disengaged positions provide positive limits for lever travel. (Note that stop pins are not available on 1078 size II-FA actuators.)
3

1078 Manual Actuator
Product Bulletin
61.8:1078
January 2009
Table 1. Fisherr 1051, 1052, and 1066SR Actuator Size Selection and Specifications for Sizes AAA, AA, and A
|
|
|
|
|
STANDARD |
|
|
|
|
|
|
|
HAND- |
||
|
|
|
POWER |
MAXIMUM |
|
|
|
|
|
WHEEL |
|||||
MANUAL |
SHAFT SIZE(1) |
HANDWHEEL |
|
WHEEL-RIM-FORCE |
|
||||||||||
ACTUATOR(2) |
TORQUE(3) |
|
|
TURNS FOR |
|||||||||||
ACTUATOR |
|
|
DIAMETER |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
ROTATION |
||||
SIZE |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(max output |
|
|
|
|
|
|
|
|
For Maximum |
For Less Than |
Degrees |
||||
torque) |
|
|
|
|
|
|
|
|
Torque |
Maximum Torque |
|||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mm |
Inch |
Type |
Size |
mm |
Inch |
NSm |
LbfSin |
N |
Pounds |
N |
|
Pounds |
60 |
90 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12.7 |
1/2 |
|
|
|
|
143 |
1271 |
157 |
35 |
|
|
|
|
|
|
15.9 |
5/8 |
|
|
|
|
223 |
1981 |
245 |
55 |
|
|
|
|
|
|
19.1 |
3/4 |
1051 |
33 |
|
|
271 |
2400 |
298 |
67 |
|
|
|
|
|
|
(22.2, |
(7/8, |
|
|
|
|
271 |
2400 |
298 |
67 |
|
|
|
|
|
|
25.4) |
1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12.7 |
1/2 |
|
|
|
|
190 |
1681 |
209 |
47 |
|
|
Divide |
|
|
|
15.9 |
5/8 |
|
|
|
|
270 |
2391 |
297 |
66 |
Divide |
|
|
|
|
AAA |
|
|
|
|
|
lbfSin |
|
|
|||||||
19.1 |
3/4 |
1052 |
33 |
305 |
12 |
271 |
2400 |
298 |
67 |
NSm req’d |
|
4 |
6 |
||
(2400 in.lbs) |
|
req’d by |
|||||||||||||
(22.2, |
(7/8, |
|
|
|
|
271 |
2400 |
298 |
67 |
by 0.91 |
|
|
|
||
|
|
|
|
|
|
36 |
|
|
|||||||
|
25.4) |
1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12.7 |
1/2 |
|
|
|
|
169 |
1495 |
186 |
42 |
|
|
|
|
|
|
15.9 |
5/8 |
|
|
|
|
249 |
2205 |
274 |
61 |
|
|
|
|
|
|
19.1 |
3/4 |
1066SR |
20 |
|
|
271 |
2400 |
298 |
67 |
|
|
|
|
|
|
(22.2, |
(7/8, |
|
|
|
|
271 |
2400 |
298 |
67 |
|
|
|
|
|
|
25.4) |
1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12.7 |
1/2 |
|
|
|
|
283 |
2515 |
218 |
49 |
|
|
Divide |
|
|
|
15.9 |
5/8 |
|
|
|
|
363 |
3225 |
279 |
63 |
Divide |
|
|
|
|
AA |
|
|
|
|
|
lbfSin |
|
|
|||||||
19.1 |
3/4 |
1066SR |
27 |
305 |
12 |
464 |
4120 |
357 |
81 |
NSm req’d |
|
5.7 |
8.5 |
||
(4800 in.lbs) |
|
req’d by |
|||||||||||||
(22.2, |
(7/8, |
|
|
|
|
541 |
4800 |
416 |
94 |
by 1.3 |
|
|
|
||
|
|
|
|
|
|
51 |
|
|
|||||||
|
25.4) |
1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12.7 |
3/4 |
|
|
|
|
717 |
6350 |
299 |
66 |
|
|
Divide |
|
|
|
22.2, |
(7/8, |
|
|
|
|
926 |
8200 |
385 |
85 |
Divide |
|
|
|
|
A |
|
|
|
|
|
lbfSin |
|
|
|||||||
25.4) |
1) |
1066SR |
75 |
610 |
24 |
|
|
|
|
NSm req’d |
|
5.3 |
8 |
||
(8200 in.lbs) |
|
|
|
|
|
req’d by |
|||||||||
(31.8, |
(1-1/4, |
|
|
|
|
926 |
8200 |
385 |
85 |
by 2.4 |
|
|
|
||
|
|
|
|
|
|
96 |
|
|
|||||||
|
38.1) |
1-1/2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. Requires flatted shaft as in the H mounting adaptation.
2. Field conversion of actuators for F and G mounting adaptations requires installation of new parts. The 1051 or 1052 Size 33 actuator requires installation of appropriate lever and stub shaft. The 1066 actuator requires installation of appropriate hub assembly.
3. Compare table value with torque requirements of the valve plus the torque required to compress the power actuator spring (from Fisher Catalog 14). Note that dynamic torque of the valve may have a positive or negative effect on total torque required.
Table 2. Fisherr 1066 Actuator Size Selection and Specifications for Sizes AAA, AA, and A
|
|
|
|
|
STANDARD |
|
|
|
|
|
|
|
HANDWHEEL |
|||
|
|
|
POWER |
HAND- |
MAXIMUM |
|
|
|
|
|
||||||
MANUAL |
SHAFT SIZE(1) |
|
WHEEL-RIM-FORCE |
|
TURNS FOR |
|||||||||||
ACTUATOR(2) |
WHEEL |
TORQUE(3) |
|
|
||||||||||||
ACTUATOR |
|
|
|
|
|
|
|
ROTATION |
||||||||
|
|
|
|
DIAMETER |
|
|
|
|
|
|
|
|||||
SIZE |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(max output |
|
|
|
|
|
|
|
|
For Maximum |
For Less Than |
|
Degrees |
||||
torque) |
|
|
|
|
|
|
|
|
Torque |
Maximum Torque |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
mm |
Inch |
Type |
Size |
mm |
Inch |
NSm |
LbfSin |
N |
Pounds |
N |
|
Pounds |
60 |
|
90 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12.7 |
1/2 |
|
|
|
|
58 |
515 |
62 |
14 |
|
|
Divide |
|
|
|
|
15.9 |
5/8 |
|
|
|
|
138 |
1225 |
151 |
34 |
Divide |
|
|
|
|
|
AAA |
|
|
|
|
|
lbfSin |
|
|
|
|||||||
19.1 |
3/4 |
1066 |
20 |
305 |
12 |
239 |
2120 |
262 |
59 |
NSm req’d |
|
4 |
|
6 |
||
(2400 in.lbs) |
|
req’d by |
|
|||||||||||||
(22.2, |
(7/8, |
|
|
|
|
271 |
2400 |
298 |
67 |
by 0.91 |
|
|
|
|
||
|
|
|
|
|
|
36 |
|
|
|
|||||||
|
25.4) |
1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12.7 |
1/2 |
|
|
|
|
58 |
515 |
44 |
10 |
|
|
Divide |
|
|
|
|
15.9 |
5/8 |
|
|
|
|
138 |
1225 |
106 |
24 |
Divide |
|
|
|
|
|
AA |
|
|
|
|
|
lbfSin |
|
|
|
|||||||
19.1 |
3/4 |
1066 |
27 |
305 |
12 |
239 |
2120 |
182 |
41 |
NSm req’d |
|
5.7 |
|
8.5 |
||
(4800 in.lbs) |
|
req’d by |
|
|||||||||||||
(22.2, |
(7/8, |
|
|
|
|
467 |
4140 |
360 |
81 |
by 1.3 |
|
|
|
|
||
|
|
|
|
|
|
51 |
|
|
|
|||||||
|
25.4) |
1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12.7 |
3/4 |
|
|
|
|
239 |
2120 |
98 |
22 |
|
|
Divide |
|
|
|
|
(22.2, |
(7/8, |
|
|
|
|
467 |
4140 |
191 |
43 |
Divide |
|
|
|
|
|
A |
|
|
|
|
|
lbfSin |
|
|
|
|||||||
25.4) |
1) |
1066 |
75 |
610 |
24 |
|
|
|
|
NSm req’d |
|
5.3 |
|
8 |
||
(8200 in.lbs) |
|
|
|
|
|
req’d by |
|
|||||||||
(31.8, |
(1-1/4, |
|
|
|
|
926 |
8200 |
385 |
85 |
by 2.4 |
|
|
|
|
||
|
|
|
|
|
|
96 |
|
|
|
|||||||
|
38.1) |
1-1/2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. Requires flatted shaft as in the H mounting adaptation.
2. Field conversion of actuators for F and G mounting adaptations requires installation of new parts. The 1066 actuator requires installation of appropriate hub assembly.
3. Compare table value with torque requirements of the valve (from Fisher Catalog 14). Note that dynamic torque of the valve may have a positive or negative effect on total torque required.
4
 Loading...
Loading...