


Distributed by
Any reference to Raytheon or RTN in this manual should be interpreted as Raymarine. The names Raytheon and RTN are owned by the
Raytheon Company.
ST6000 Plus
Autopilot
Control Unit
Owner’s
Handbook
Document number: 81133_3
Date: 1st April 1999
2 |
Title of handbook |
Preface |
1 |
|
|
|
|
|
|
|
Raytheon Electronics, as part of its commitment to continuous imrovement and updating, reserve the right to make changes, without prior notice, to the equipment, equipment specifications, and the instructions contained within this handbook.
To the best of our knowledge, the information contained within this handbook was correct as it went to press.
A great deal of care has been taken to ensure that this handbook is as accurate as possible. However, liability cannot be accepted for inaccuracies or omissions.
Autohelm and SeaTalk are registered trademarks of Raytheon Electronics
WindTrim, AutoTack, AutoTrim, AutoSeastate, AutoAdapt, AutoRelease and CodeLock are trademarks of Raytheon Electronics
Copyright © Raytheon Electronics 1996
2 |
ST6000 Plus Autopilot Control Unit Owner,s Handbook |
Preface |
3 |
Preface
This handbook contains information on the operation and installation of your new equipment. In order to obtain the best performance from your autopilot, please read this handbook thoroughly.
How this handbook is organised
This handbook is divided into the following chapters:
Chapter 1: Introduces the autopilot, its features and its use.
Chapter 2: Covers basic autopilot operation.
Chapter 3: Explains how to use Track and Vane (WindTrim) modes and adjust autopilot performance, and summarises the ST6000 Plus alarms.
Chapter 4: Explains how to use the CodeLock security feature.
Chapter 5: Provides details on how to make adjustments to customise the autopilot to your particular vessel.
Chapter 6: Explains how to install the ST6000 Plus.
Chapter 7: Covers functional testing and initial calibration procedures after installation, and intial sea trials.
Chapter 8: Provides general maintenance procedures.
Chapter 9: Provides information to help you resolve any problems you may encounter with your autopilot.
An index is included at the end of this handbook, followed by a template for the installation of the control unit.
Safety information
Passage making under autopilot control is an enjoyable experience that can, if you are not careful, lead to the relaxation of the permanent watch. A permanent watch MUST be maintained no matter how clear the sea may appear to be.
WARNING:
Remember, a large ship can travel two miles in five minutes – just the time it takes to make a cup of coffee.
4 |
ST6000 Plus Autopilot Control Unit Owner,s Handbook |
The following rules should always be observed:
•Maintain a permanent watch and regularly check all around for other vessels and obstacles to navigation – no matter how clear the sea may appear a dangerous situation can develop rapidly.
•Maintain an accurate record of the vessel’s position either by use of a radio navigation receiver or visual bearings.
•Maintain a continuous plot of position on a current chart. Ensure the locked autopilot heading steers you clear of all obstacles. Make proper allowance for Tidal Set – the autopilot cannot!
•Even when your autopilot is locked onto the desired Track using a radio navigation receiver, always maintain a log and make regular positional plots. Radio navigation signals can produce significant errors under some circumstances and the autopilot cannot detect this situation.
•Make sure that all members of crew are familiar with the procedures to disengage the autopilot.
Your Raytheon autopilot will add a new dimension to your boating enjoyment. However, it is the responsibility of the skipper to ensure the safety of the vessel at all times by careful observance of these basic rules.
EMC conformance
All Raytheon equipment and accessories are designed to the best industry standards for use in the leisure marine environment.
Their design and manufacture conforms to the appropriate Electromagnetic Compatibility (EMC) standards, but correct installation is required to ensure that performance is not compromised.
Warranty
To verify the ownership of your new autopilot, please take a few minutes to complete the warranty card. It is important that you complete the owner information and return the card to the factory to receive full warranty benefits.

Preface |
5 |
Contents |
|
Preface..................................................................................... |
3 |
How this handbook is organised ....................................... |
3 |
Warranty ............................................................................ |
3 |
Safety information ............................................................. |
3 |
EMC conformance ............................................................ |
4 |
Chapter 1: Introduction ......................................................... |
1 |
1.1 Overview ..................................................................... |
1 |
1.2 Specification ............................................................... |
2 |
Chapter 2: Basic Operation ................................................... |
3 |
2.1 Key functions .............................................................. |
3 |
2.2 Display layout ............................................................. |
4 |
2.3 Using Auto mode ........................................................ |
5 |
Engaging the Autopilot (Auto) .................................... |
5 |
Disengaging the autopilot (Standby) to return to hand |
|
steering ........................................................................ |
5 |
Changing course in Auto mode ................................... |
5 |
Dodging obstacles in Auto mode ................................ |
6 |
Returning to the previous locked heading ................... |
6 |
Automatic tack (AutoTack) ......................................... |
7 |
AutoTack to starboard ........................................... |
7 |
AutoTack to port .................................................... |
8 |
Off course alarm .......................................................... |
8 |
Operating hints ............................................................ |
9 |
Making major course changes ............................... |
9 |
Course changes under autopilot control ................ |
9 |
Sailboats in gusty conditions ............................... |
10 |
2.4 Using Manual mode .................................................. |
10 |
2.5 Display and keypad illumination .............................. |
10 |

6 |
ST6000 Plus Autopilot Control Unit Owner,s Handbook |
|
|
2.6 Data pages ................................................................. |
11 |
|
Chapter 3: Advanced Operation ......................................... |
13 |
|
3.1 Operation in Track mode .......................................... |
13 |
|
Initiating Track mode ................................................ |
13 |
|
Automatic acquisition .......................................... |
14 |
|
Manual acquisition .............................................. |
15 |
|
Cross track error ........................................................ |
16 |
|
Tidal stream compensation ........................................ |
16 |
|
Waypoint arrival and advance ................................... |
17 |
|
Arrival .................................................................. |
17 |
|
Skipping a waypoint ............................................ |
18 |
|
Advance ............................................................... |
18 |
|
Dodges....................................................................... |
18 |
|
Initiating a dodge manoeuvre .............................. |
18 |
|
Cancelling a dodge manoeuvre ............................ |
18 |
|
Safety ......................................................................... |
18 |
|
Position confirmation at the start of a passage .... |
19 |
|
Verifying computed positions .............................. |
19 |
|
Plot frequency ...................................................... |
19 |
|
Setting waypoints ................................................. |
19 |
|
General ................................................................ |
19 |
|
3.2 Operation in Vane mode (WindTrim) ....................... |
19 |
|
Selecting Vane mode ................................................. |
20 |
|
Adjusting the locked wind angle ............................... |
20 |
|
Returning to the previous apparent wind angle ......... |
21 |
|
Dodges....................................................................... |
21 |
|
Wind shift alarm ........................................................ |
22 |
|
Using AutoTack in Vane mode .................................. |
22 |
|
Operating hints .......................................................... |
23 |

Preface |
7 |
3.3 Adjusting autopilot performance .............................. |
23 |
Changing the response level (AutoSeastate) ............. |
23 |
Changing the rudder gain .......................................... |
24 |
3.4 Alarms ....................................................................... |
24 |
SeaTalk failure ..................................................... |
25 |
No link ................................................................. |
25 |
Off course ............................................................ |
25 |
Wind shift ............................................................ |
25 |
Large cross track error ......................................... |
25 |
Drive stopped....................................................... |
25 |
Data not received ................................................. |
26 |
Waypoint advance ................................................ |
26 |
Low battery .......................................................... |
26 |
Watch alarm ......................................................... |
27 |
Man overboard (MOB) ........................................ |
27 |
Chapter 4: CodeLock ............................................................ |
29 |
4.1 CodeLock Modes ...................................................... |
29 |
4.2 Setting Up CodeLock ................................................ |
29 |
Initial Setup ............................................................... |
29 |
Changing the code or master unit .............................. |
31 |
4.3 Entering your code (Manual mode only) .................. |
31 |
4.4 Code number problems ............................................. |
32 |
Chapter 5: Customising the System .................................. |
33 |
5.1 User setup ................................................................. |
33 |
Compass deviation correction ................................... |
35 |
Deviation display ....................................................... |
35 |
Heading alignment .................................................... |
35 |
Heading mode ........................................................... |
35 |
Bar selection .............................................................. |
35 |
8 |
ST6000 Plus Autopilot Control Unit Owner,s Handbook |
|
|
Rudder calibration ..................................................... |
36 |
|
Data pages ................................................................. |
36 |
|
5.2 Dealer setup: Type 100/300 Course Computer ......... |
38 |
|
Recommended settings .............................................. |
39 |
|
Pilot type ................................................................... |
39 |
|
Calibration lock ......................................................... |
40 |
|
Rudder gain ............................................................... |
40 |
|
Rate level ................................................................... |
40 |
|
Rudder offset ............................................................. |
41 |
|
Rudder limit ............................................................... |
41 |
|
Turn limit ................................................................... |
41 |
|
Cruise speed .............................................................. |
42 |
|
Off course alarm ........................................................ |
42 |
|
AutoTrim ................................................................... |
43 |
|
Power steer ................................................................ |
43 |
|
Drive type .................................................................. |
44 |
|
Rudder damping ........................................................ |
44 |
|
Variation .................................................................... |
45 |
|
AutoAdapt ................................................................. |
45 |
|
Latitude ..................................................................... |
46 |
|
Wind Trim ................................................................. |
46 |
|
Tack angle ................................................................. |
46 |
|
AutoRelease .............................................................. |
47 |
|
Response ................................................................... |
47 |
|
Recording calibration settings ................................... |
47 |
|
Chapter 6: Installation ........................................................ |
49 |
|
6.1 Planning the Installation ............................................ |
49 |
|
EMC installation guidelines ...................................... |
49 |
|
Connections to other equipment ................................ |
50 |
|
Cabling ...................................................................... |
50 |

Preface |
9 |
6.2 Control head .............................................................. |
50 |
Siting ......................................................................... |
51 |
Mounting procedure .................................................. |
51 |
Connections to the SeaTalk bus ................................. |
52 |
SeaTalk cables ..................................................... |
52 |
Cable types .......................................................... |
52 |
Typical SeaTalk cabling ....................................... |
53 |
6.3 NMEA interface ........................................................ |
53 |
Cabling ...................................................................... |
53 |
NMEA cable connectors ........................................... |
54 |
NMEA data transmission .......................................... |
54 |
Transmission of NMEA data on SeaTalk .................. |
55 |
6.4 Functional test (repeater unit) ................................... |
55 |
Switch on ................................................................... |
56 |
Navigation interface (GPS, Decca, Loran) ................ |
56 |
SeaTalk interface ....................................................... |
57 |
Chapter 7: Post Installation Procedures ........................... |
59 |
7.1 Functional test and initial calibration ........................ |
59 |
Switch on ................................................................... |
59 |
Initial calibration ....................................................... |
59 |
Operating sense ......................................................... |
59 |
Navigation interface (GPS, Decca, Loran) ................ |
60 |
Wind transducer interface ......................................... |
61 |
SeaTalk interface ....................................................... |
61 |
7.2 Initial sea trial ........................................................... |
62 |
EMC conformance .................................................... |
62 |
Overview ................................................................... |
62 |
Automatic compass deviation correction .................. |
63 |
Further heading alignment adjustment ...................... |
65 |

10 |
ST6000 Plus Autopilot Control Unit Owner,s Handbook |
|
|
Checking autopilot operation .................................... |
66 |
|
Checking the rudder gain .......................................... |
66 |
|
Chapter 8: Maintenance ...................................................... |
69 |
|
General ............................................................................ |
69 |
|
Servicing and safety ........................................................ |
69 |
|
Advice ............................................................................. |
69 |
|
Chapter 9: Fault Finding ...................................................... |
71 |
|
Index ...................................................................................... |
73 |
Chapter 1: Introduction |
1 |
Chapter 1: Introduction
1.1 Overview
The ST6000 Plus is a SeaTalk® compatible autopilot control unit. It is designed for use as a repeater in an autopilot system, allowing autopilot control from a secondary location, or as the control unit for a
Type 100/300 Course Computer. It can also repeat instrument data in a programmable selection of Data Pages.
The ST6000 Plus can share all data transmitted from other Raytheon SeaTalk instruments:
•Wind information from a wind instrument can be used for wind trim (Vane) steering without the need to install a separate vane.
•Track information, from a navigation instrument, provides waypoint control from the autopilot.
•Boat speed from the Speed instrument provides optimum trackkeeping performance.
The ST6000 Plus autopilot can also be used with any navigator (GPS, Decca, Loran) transmitting NMEA 0183 data.
There are five operating modes: Standby: Autopilot disengaged
Auto: Autopilot engaged and locked onto a heading
Track: Autopilot maintains a track between two waypoints created using a navigation system
Vane: Autopilot maintains a course relative to an apparent wind angle
Manual: Autopilot power steers rudder using joystick control
When the ST6000 Plus is being used to repeat instrument data, “pop-up pilot” pages are displayed for 5 seconds whenever a change in autopilot control is made.
The ST6000 Plus also provides the following:
•Automatic tack facility, which can be used in Auto and Vane modes
•Automatic compass deviation correction
•Northerly/Southerly heading compensation
•Automatic heading deadband – seastate control
•Waypoint advance feature
2 |
ST6000 Plus Autopilot Control Unit Owner,s Handbook |
•Setup and calibration options to suit each installation, giving maximum performance with many types of boat, with three calibration menus (user, intermediate and dealer)
•Raytheon CodeLock security support
1.2Specification
•Power Supply: 10 to 15 V dc
•Current consumption:
Standby: 60 mA (less than 200 mA with full lighting)
•Operating temperature: 0°C to +70°C (32°F to 158°F)
•Eight button illuminated digital keypad
•LCD display of heading, locked course and navigational data, with three levels of illumination
•Input connections for SeaTalk and NMEA
•Output connection for SeaTalk
Chapter 2: Basic Operation |
3 |
Chapter 2: Basic Operation
This chapter first provides summary diagrams of the key functions and screen layout. It then gives operating instructions for engaging the autopilot and using Auto mode, changing the lighting, and displaying Data Pages.
2.1 Key functions
The autopilot is controlled using simple push-button operations, all of which are confirmed with a beep. In addition to the main single key functions, there are several dual key functions.
-1 plus +1
Press for Response level
-1 plus -10 |
|
|
Press for 1 second |
+1 plus +10 |
|
Press together |
|
|
for Rudder Gain |
Press together |
|
for AutoTack |
|
|
|
for AutoTack |
|
to port |
|
|
|
to starboard |
|
DISP |
|
|
|
TRACK |
|
Press for |
|
|
|
Press for Track |
|
Data Page |
|
|
|
mode from Auto |
|
Press for 1 second |
|
|
|
Press to accept |
|
for lamp control |
|
|
|
waypoint advance |
|
|
|
|
|
|
Press for 1 second |
|
|
|
|
|
to skip waypoint |
STANDBY |
Course Change Keys |
AUTO |
|||
Press for Standby |
Port 1˚ Starboard 1˚ |
Press for Auto mode |
|||
mode |
Port 10˚ Starboard 10˚ |
Press for 1 second |
|||
|
|
|
|
|
|
Press and hold for |
|
|
|
for Last Heading |
|
Setup modes |
|
|
|
Press again to |
|
|
|
|
|
|
|
|
|
STANDBY plus AUTO |
accept Last Heading |
||
|
|
Press for Vane mode |
|
||
|
|
Press for 1 second for Last Wind |
|
||
|
|
Press again to accept Last Wind |
|
||
|
|
|
|
|
D3447-1 |
•The autopilot always powers up in Standby mode. (If the text CODE LOCK is displayed, enter your code as described in Chapter 4.)
•Course changes can be made at any time using the –1, +1, –10 and +10 keys.
•You can return to manual steering at any time by pressing standby.

4 |
ST6000 Plus Autopilot Control Unit Owner,s Handbook |
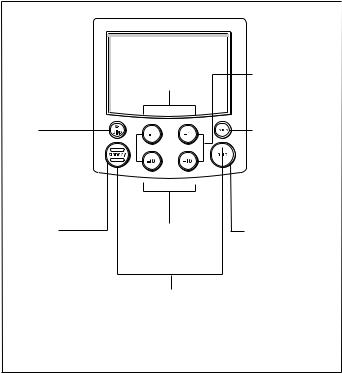
2.2 Display layout
The following illustration shows all the elements, together with a brief description, that make up the ST6000 Plus autopilot LCD display.
MANUAL |
3 |
Rudder or Steer Direction Indicator
D3507-1
•The bar graph at the bottom of the display is normally a rudder bar. If it has been set as a direction-to-steer indicator, the display depends on the current mode, as follows:
Mode |
Bar |
|
|
Standby |
Not used |
|
|
Auto |
Heading error bar |
|
|
Track |
Cross track error (XTE) bar, in 0.02 nm increments |
|
|
Vane |
Wind angle error bar |
•If neither distance units (nm or SM) is displayed, the distance is in Km.

Chapter 2: Basic Operation |
5 |
2.3 Using Auto mode
Engaging the Autopilot (Auto)
1.Steady the vessel on the required heading.
2.Press auto.
• In Auto mode, the display shows the locked autopilot heading.
Disengaging the autopilot (Standby) to return to hand steering
• Press standby.
•In Standby mode, the display shows the vessel’s current compass heading.
•The previous autopilot heading is memorised and can be recalled (see Returing to the previous locked heading).
Changing course in Auto mode
•The +1 and +10 (starboard) and –1 and –10 (port) keys are used to change the locked heading, in increments of 1° and 10°, when the autopilot has control.
Example: a 30° course change to port = press –10 three times.
6 |
ST6000 Plus Autopilot Control Unit Owner,s Handbook |
|
|
|
|
|
|
|
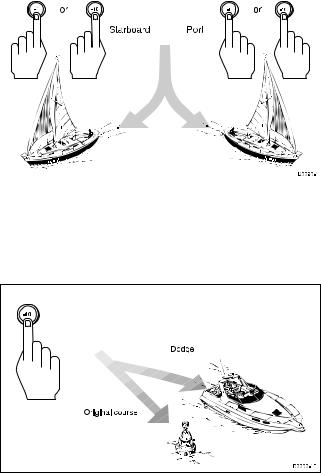
Dodging obstacles in Auto mode
In order to avoid an obstacle when your vessel is under autopilot control, select a course change in the appropriate direction (for example, port 30° = press –10 three times).
•When safely clear of the obstacle, you can reverse the previous course change (for example, press +10 three times), or return to the previous locked heading (LAST HDG).
Returning to the previous locked heading (LAST HDG)
If for any reason the vessel is steered away from the selected locked heading (for example, executing a dodge manoeuvre or selecting Standby) you can return to the previous locked heading:

Chapter 2: Basic Operation |
7 |
1.Press auto for 1 second. The previous locked heading (LAST HDG?) is displayed for 10 seconds.
 1
1 

Note: A direction-to-steer indicator is displayed to show you the direction the vessel will turn.
2.To accept this heading, and resume the original course, press auto once within this 10 second period.
If you do not press auto while the display is flashing, the current heading will be maintained.
Automatic tack (AutoTack)
The ST6000 Plus has a built in automatic tack facility that turns the vessel through a predetermined angle (the factory default is 100°) in the required direction.
AutoTack to starboard
• Press the +1 and +10 keys together to tack to starboard.
8 |
ST6000 Plus Autopilot Control Unit Owner,s Handbook |
|||
|
|
|
|
|
|
|
|
|
|
AutoTack to port
•Press the -1 and -10 keys together to tack to port .
Off course alarm
The off course alarm will sound if the locked autopilot heading and the vessel’s current heading differ for more than 20 seconds, by more than the alarm angle set in calibration (the factory default is 20°).
Chapter 2: Basic Operation |
9 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.To cancel the off course alarm, press standby to return to hand steering.
2.Check whether your vessel is carrying too much sail, or whether the sails are badly balanced. Significant improvements in course keeping can usually be obtained by improving sail balance.
Operating hints
Making major course changes
•It is sound seamanship to make major course changes only when steering manually.
•Manual course changes ensure that obstructions or other vessels can be cleared properly, and due account taken of the changed wind and sea conditions on the new heading prior to engaging the autopilot.
Course changes under autopilot control
It is important to understand the effect of sudden trim changes on steering performance. When a sudden trim change occurs, due, for example, to weather helm or sail imbalance, there will be a delay before the automatic trim applies rudder to restore the locked heading. This correction can take up to one minute.
Large course changes which change the apparent wind direction can produce large trim changes. In these situations, the autopilot will not immediately assume the new automatic heading, and will only settle onto course when the automatic trim has been fully established.
To eliminate this problem, the following procedure can be adopted for large course changes:
1.Note the required new heading.
2.Select standby and steer manually.
3.Bring the vessel onto the new heading.
10 |
ST6000 Plus Autopilot Control Unit Owner,s Handbook |
4.Select auto and let the vessel settle onto course.
5.Bring the vessel to the final course with 1° increments.
Sailboats in gusty conditions
In gusting conditions, the course may tend to wander slightly, particularly if the sails are badly balanced. A significant improvement in course keeping can always be obtained by improving sail balance. Bear in mind the following important points:
•Do not allow the yacht to heel over excessively
•Ease the mainsheet traveller to leeward to reduce heeling and weather helm
•If necessary, reef the mainsail a little early
It is also advisable, whenever possible, to avoid sailing with the wind dead astern in very strong winds and large seas.
Ideally, the wind should be brought at least 30° away from a dead run and, in severe conditions, it may be advisable to remove the mainsail altogether and sail under headsail only.
Provided these simple precautions are taken, the autopilot will be able to maintain competent control in gale force conditions.
2.4 Using Manual mode
If your system is fitted with a joystick, the ST6000 Plus will enter
Manual mode when the joystick is used.
The ST6000 Plus will return to Standby mode when the joystick button is released, or if you press the standby key on the ST6000 Plus.
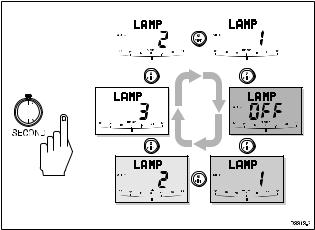
2.5Display and keypad illumination
•Press disp for 1 second, from any mode, to enter illumination adjustment mode and turn the lights on.
•Subsequent presses of the disp key cycles the possible illumination settings: L3, L2, L1, OFF, L1, L2, L3 etc. where L3 is the brightest setting.
Chapter 2: Basic Operation |
11 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 1
1 





The display times out to normal operation after 10 seconds of keypad inactivity.
Pressing any other key before the 10 second time-out will select the mode assigned to that key (for example, auto selects Auto mode, standby selects Standby mode).
Note: If other SeaTalk instruments or autopilot control units are connected to SeaTalk, the illumination can be adjusted from these units.
Any adjustments to the illumination are lost when the unit is switched off.
The keys are still lit at a courtesy level when the display lighting is off.
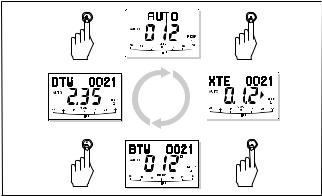
2.6 Data pages
The disp key is used to cycle “pages” of SeaTalk or NMEA data. Once a Data Page is selected, this page becomes the principle autopilot display. The autopilot mode displays (Standby, Auto, Track Vane and Manual) then become “pop-ups”, and are displayed for 5 seconds when the autopilot mode is changed or a course change is made.
•Press disp to display each Data Page in turn.
•When the last Data Page is cycled, the display returns to the current autopilot mode display (for example, Standby).
•To return to a previous Data Page, press disp for 1 second within 2 seconds of displaying a page. You can continue to move backwards through the Data Page sequence in this way.
12 |
ST6000 Plus Autopilot Control Unit Owner,s Handbook |
Up to 7 Data Pages are available using the disp key. The number of pages, and the information displayed on each page, depends on the the selections made in User Setup (see section 5.1).
The following illustration shows the default settings for the Data Pages.
D3581-1
•If the required data for a page is not available, dashes are displayed instead of a value.
•Most displays are repeated data, and cannot be adjusted. The exceptions are the Response and Rudder Gain pages (if selected for display), which can be adjusted using the +1 and -1 keys.
•The current autopilot mode is shown at the left of the display, and the autopilot bar graph remains in use.
•The “direction-to-steer” arrows relate to the Data Page information.
Chapter 3: Advanced Operation |
13 |
Chapter 3:Advanced Operation
This chapter provides information on:
•Operation in Track mode
•Operation in Vane mode (WindTrim)
•Adjusting the response level and rudder gain
•Alarms
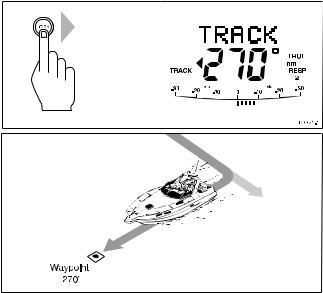
3.1Operation in Track mode
Track mode is used to maintain a track between two waypoints created on a GPS, Decca, or Loran navigation system. The ST6000 Plus will then compute any course changes to keep your boat on track, automatically compensating for tidal streams and leeway.
The ST6000 Plus can receive cross track error (the distance your vessel is from a planned track) from:
(a)A SeaTalk navigation instrument or chartplotter or
(b)A non-SeaTalk navigation system transmitting data in the
NMEA 0183 format – this can be connected directly to the ST6000 Plus NMEA input, as described in the Installation Chapter).
Track mode is selected by pressing the track key, but can only be selected from Auto mode. You can return to either Auto or Standby mode from Track mode, as follows:
•Press auto to leave Track mode and return to Auto mode.
•Press standby to leave Track mode and return to manual steering.
Note: The ST6000 Plus control head can be programmed to display various pages of navigation data, such as XTE, BTW etc. Please refer to page 37 for details.
Initiating Track mode
When initiating Track mode, the track can be acquired in one of two ways:
•Automatic acquisition, when cross track error and bearing to waypoint data are available
•Manual acquisition, when cross track error is the only available data

14 |
ST6000 Plus Autopilot Control Unit Owner,s Handbook |
Automatic acquisition
Automatic acquisition can only be achieved if the pilot is receiving cross track error and bearing to waypoint information (via SeaTalk or NMEA 0183). It is initiated as follows:
1.Bring the vessel to within 0.1nm of track
2.Press auto.
3.Press track to enter Track mode, with the current locked heading displayed.
After a short delay for data acquisition, the Waypoint Advance alarm will sound, and the display will show the planned bearing to waypoint alternating with the direction in which the boat will turn.
Note: If the vessel is further than 0.3nm from the track, the Large Cross Track Error alarm will sound. Pressstandby to cancel the alarm, hand steer closer to the track, and press auto and track again.
4.Check that it is safe to turn onto the new course.
5.Press the track key. The boat will turn on to the new course and the alarm will be cancelled.
Chapter 3: Advanced Operation |
15 |
|
|
|
|
|
|
|
Previous
Heading
D3505-1
•The display shows the new bearing to waypoint.
Manual acquisition
For manual track acquisition, when only cross track error data is available:
1.Steer the vessel to within 0.1nm of track.
2.Bring the heading to within 5° of the bearing to the next waypoint.
3.Press auto.
4.Press track to enter Track mode.
• The display shows the locked pilot heading.
Note: At low speeds, the effect of tidal streams is far more significant than it is at higher speeds. Providing the tidal flow is less than 35% of the vessel’s speed, no noticeable difference should occur in the performance of Track mode. However, extra care should be taken during manual acquisition, as follows:
•Ensure that the vessel is as close as possible to track, and the direction made good over the ground is as close as possible to the direction of the next waypoint, before selecting Track mode.
•Make positive positional checks at regular intervals, especially if navigational hazards are close by.

16 |
ST6000 Plus Autopilot Control Unit Owner,s Handbook |
Cross track error
Cross track error (XTE) is the distance between the current position and a planned route. This is displayed in nautical miles (nm), statute miles (SM) or kilometres, and is taken directly from your navigator.
The Large XTE alarm sounds if the XTE exceeds 0.3nm.
•The direction of the error is identified as “Pt” port or “Stb” starboard.
•To cancel the alarm and leave track mode, press standby to return to hand steering, or auto to return to Auto mode.
Note: If the Large Cross Track Error alarm sounds, it is usually an indication that the cross tide is too great for the vessel’s current speed.
Tidal stream compensation
Under most conditions, Track mode will hold the selected track to within ±0.05 nm (300 ft) or better. The autopilot takes account of vessel speed when computing course changes to ensure optimum
 Loading...
Loading...