

Page 1
ND 930
ND 970
User´s Manual
Position Display Units
for Lathes
5/95
Page 2
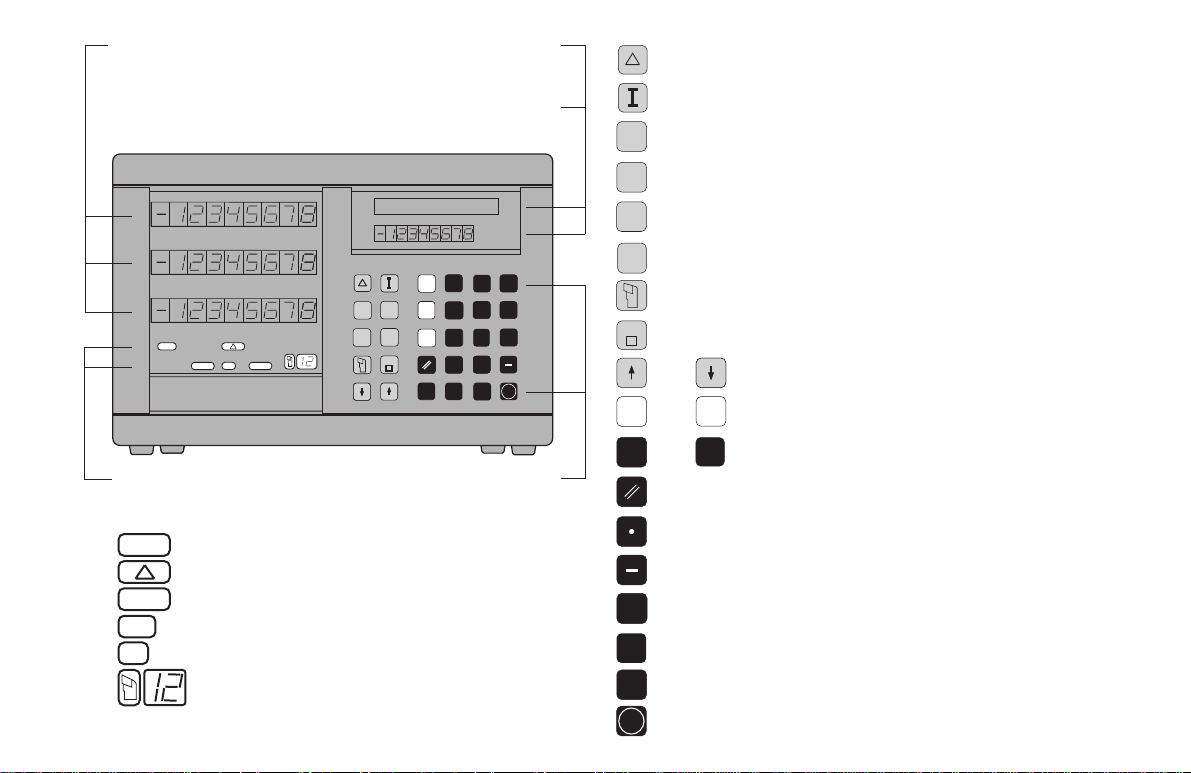
Position display
(ND 930: only two axes)
REF
HEIDENHAIN
PGM Rx
inch
Message field
Distance-to-go display (traversing to zero)
For incremental dimensions (only with
Input field
R
x
S
z
SPEC
FCT
PGM
7
9
8
X
S
R
z
x
SPEC
PGM
FCT
GOTO
5
Zo
Z
CL
6
4
3
2
1
.
0
HOLD
MOD
ENT
POS
GOTO
X
•••
distance-to-go display and program input)
Radius/diameter display X axis
Separate value/sum display (ND 970 only)
Special functions (tool datums, taper calculator,
oversize)
Program input
Tool compensation
Go directly to parameters or program steps
Page in program or parameter list/
select function
Select coordinate axis
Z
Status
display:
inch
PGM
REF
Rx
Keyboard (ND 930: no Zo or SZ keys)
Inch display is active
Distance-to-go display is active
Program input is active
Reference marks have been crossed
Radius display is active
Tool number
0
CL
HOLD
POS
MOD
ENT
•••
Numerical input
9
Reset all axes to zero,
functions for program input
Decimal point
Change sign or parameter
Clear entry/cancel operating mode
Hold current position
Select/deselect parameter list
Confirm entry
Page 3
This manual is for ND display units with the
following software numbers or higher:
Part I: Operating Instructions
ND 930 (two axes) 246 112 05
ND 970 (three axes) 246 112 05
About this manual
This manual is divided into two parts:
Part I: Operating Instructions
• Fundamentals of positioning
• ND functions
Part II: Installation and Specifications
• Mounting the display unit on the machine
• Description of operating parameters
• Switching inputs, switching outputs
Fundamentals 4
Switch-On, Crossing Over the Reference Marks 10
Switching Between Operating Modes 11
Selecting Radius or Diameter Display 12
Separate Value/Sum Display (ND 970 only) 13
Datum Setting 14
Setting the absolute workpiece datum 14
Entering tool data (relative datums) 15
Resetting all axes to zero 16
Holding Positions 17
Moving the Axes with Distance-To-Go 18
Turning with Oversizes 20
Taper Calculator 22
Multipass Cycle 26
Program Input 28
Error Messages 31
Items Delivered 32
Part II: Installation and Specifications 33
Part I: Operating Instructions
3
Page 4
Fundamentals
You can skip this chapter if you are already familiar with
coordinate systems, incremental and absolute dimensions,
nominal positions, actual positions and distance-to-go.
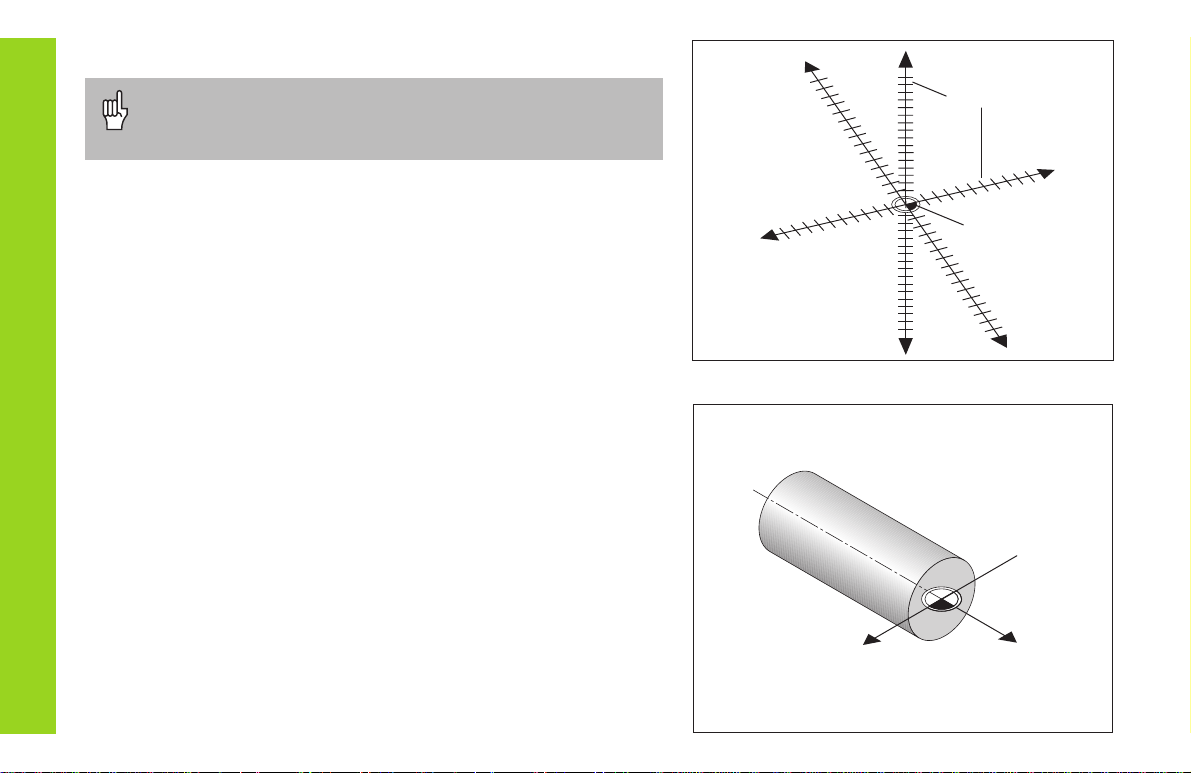
Coordinate system
Fundamentals
To describe the geometry of a workpiece, a rectangular or
coordinate system is used. The Cartesian coordinate system consists of
three mutually perpendicular axes X, Y and Z. The point of intersection
of these axes is called the datum or origin of the coordinate system.
Think of the axes as scales with divisions (usually in millimeters) that
allow us to fix points in space referenced to the datum.
To determine positions on a workpiece, the coordinate system is “laid”
onto the workpiece.
With lathe work (i.e., rotationally symmetrical workpieces), the Z axis
moves along the axis of rotation, and the X axis moves in the direction
of the radius or diameter. The Y axis can be disregarded since it would
always have the same values as the X axis.
Cartesian*
–X
+Y
+Z
–Z
Graduation
+X
Datum or
origin
–Y
X
Z
4
* Named in honor of the French mathematician and philosopher
René Descartes (1596 to 1650)
Page 5
Z
Z
O
X
+Z
+X
+Z
O
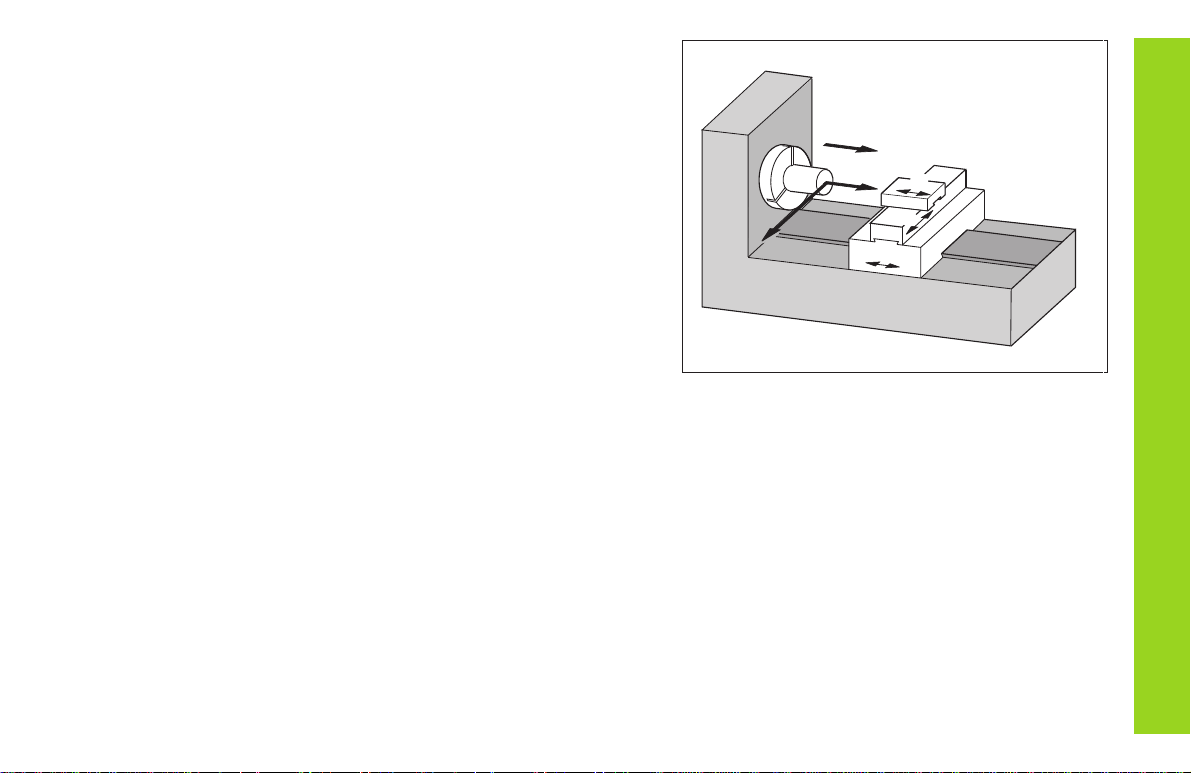
Cross slide, saddle and top slide
On conventional lathes, the tool is mounted on a slide that moves in the
direction of the X axis (the cross slide) and in the direction of the Z axis
(the saddle).
Most lathes have a top slide above the saddle. The top slide moves in Z
axis direction and is designated Zo.
Fundamentals
5
Page 6
Datum setting
The workpiece drawing is used as the basis for machining the
workpiece. To enable the dimensions in the drawing to be converted
into traverse distances of machine axes X and Z, each drawing
dimension requires a datum or reference point on the workpiece (since
a position can only be defined in relationship to another position).
The workpiece drawing always indicates one absolute datum (the
Fundamentals
datum for absolute dimensions). However, it may contain additional,
relative datums.
In the context of a numerical position display unit,
datum setting
bringing the workpiece and the tool into a defined position in relation to
each other and then setting the axis displays to the value which
corresponds to that position. This establishes a fixed relationship
between the actual positions of the axes and the displayed positions.
With the ND, you can set one absolute datum point and as many as 99
relative datum points (tool datums), and store them in nonvolatile
memory.
means
3530
Relative
datum
Absolute
datum
Z
5
10
X
6
Page 7
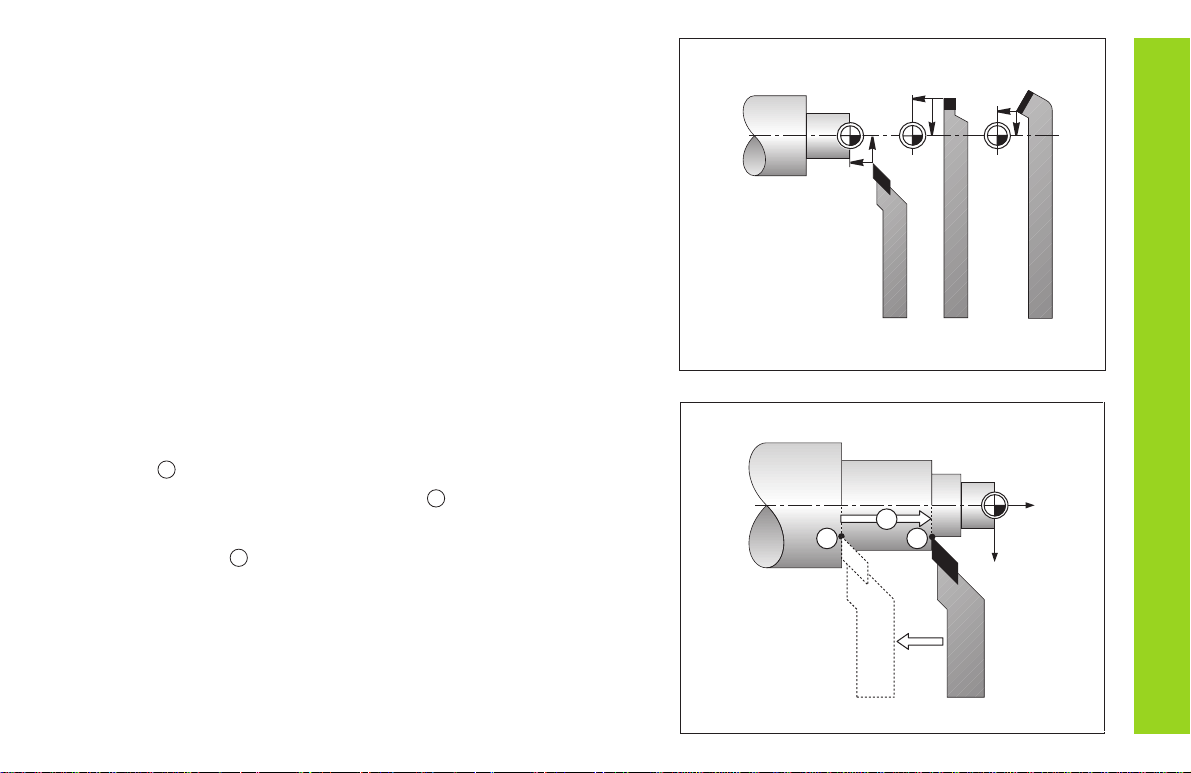
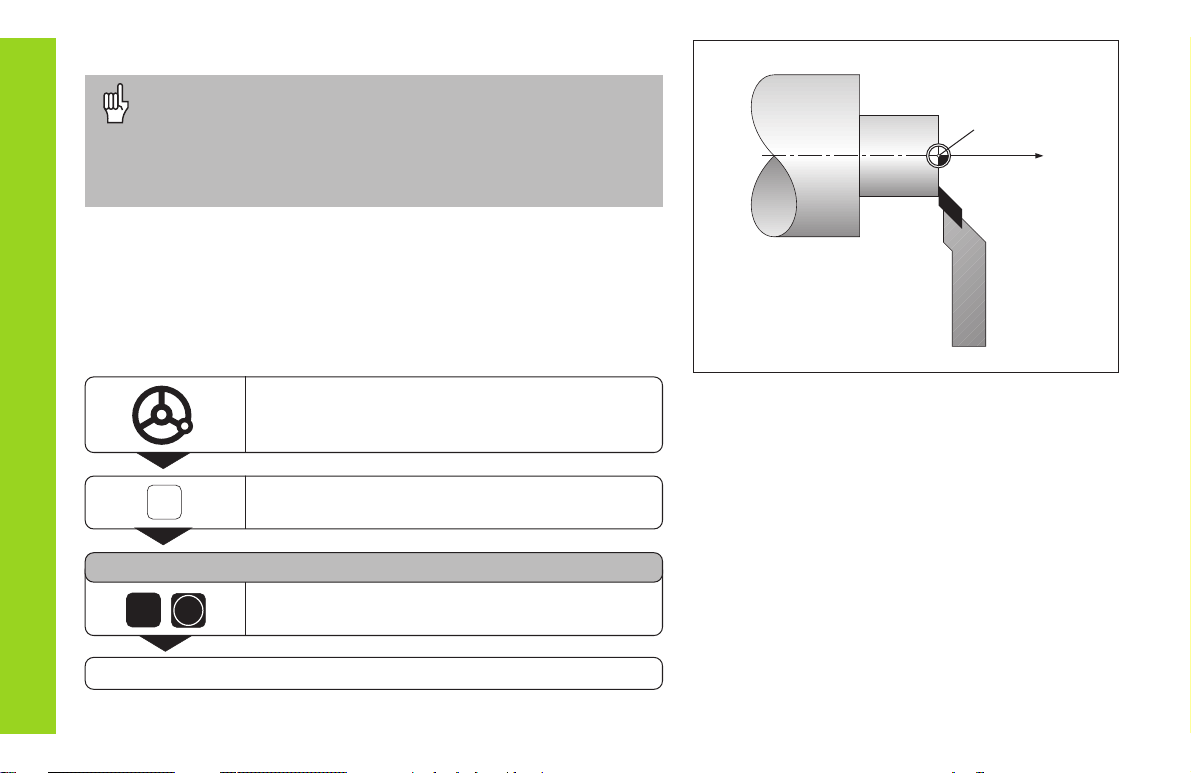
Tool datums (tool compensation)
Your display unit should show you the absolute position of the
workpiece, regardless of the length and shape of the particular tool
being used. For this reason you must determine the tool data and enter
them. First touch the workpiece with the cutting edge of the tool and
then enter the associated display value for that position.
You can enter tool data for up to 99 tools. When you have set the
absolute workpiece datum for a new workpiece, all tool data (= relative
datum points) are referenced to the new workpiece datum.
Fundamentals
Nominal position, actual position and distance-to-go
The positions to which the tool is to move are called the nominal
S
positions (
given moment is called the actual position (I).
The distance from the nominal position to the actual position is called
the distance-to-go (
Sign for distance-to-go
When you are using the distance-to-go display, the nominal position
becomes the relative datum (display value 0). The distance-to-go is
therefore negative when you move in the positive axis direction, and
positive when you move in the negative axis direction.
). The position at which the tool is actually located at any
).
R
R
T1
T2
IS
T3
Z
X
7
Page 8
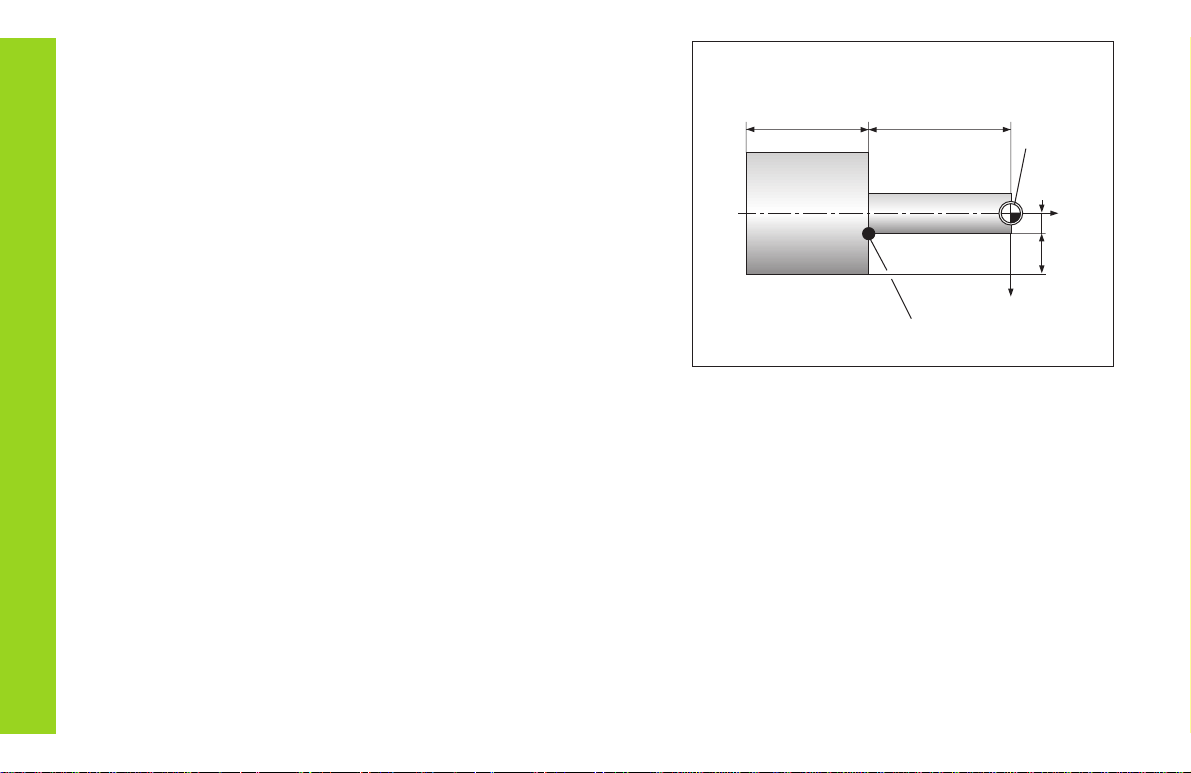
Absolute workpiece positions
Each position on the workpiece is uniquely defined by its absolute
coordinates.
Example Absolute coordinates of position
Fundamentals
If you are working according to a workpiece drawing with absolute
dimensions, you are moving the tool to the coordinates.
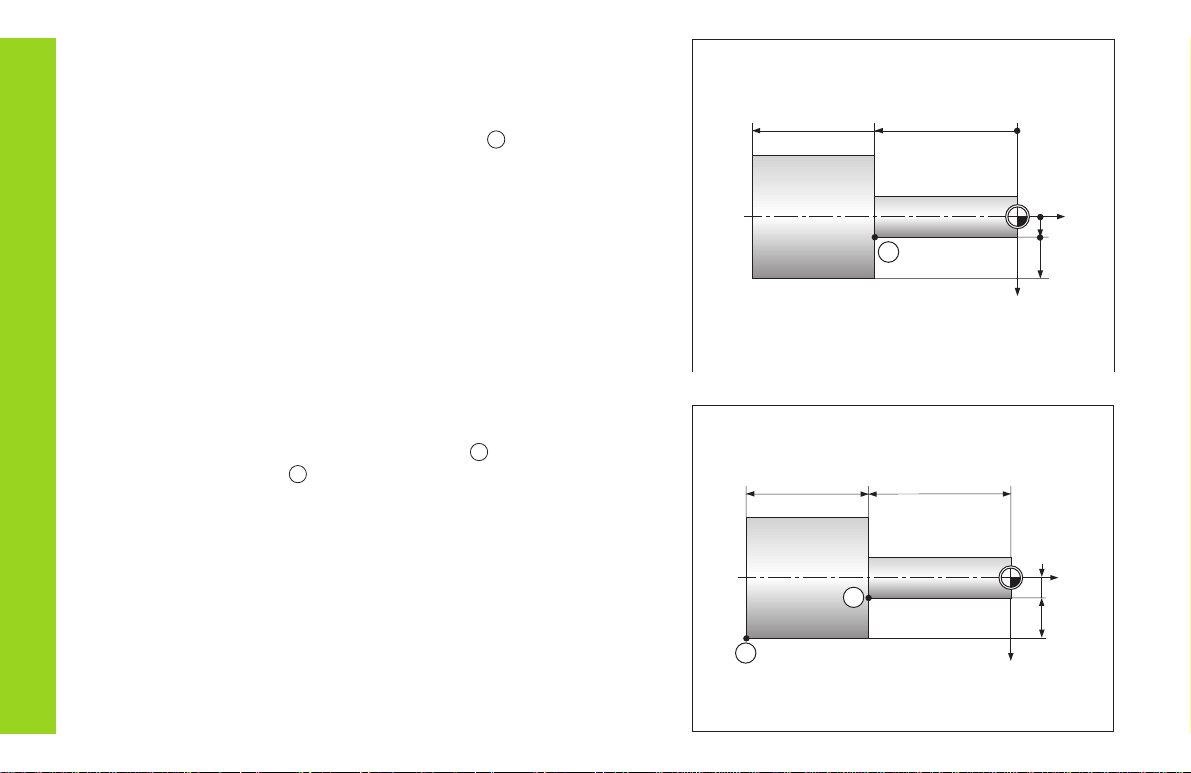
Relative workpiece positions
A position can also be defined relative to the previous nominal position.
The datum for the dimension is then located at the previous nominal
position. Such coordinates are termed incremental coordinates or
chain dimensions. Incremental coordinates are indicated by a preceding
I.
Example Relative coordinate of position referenced to
If you are working according to a workpiece drawing with incremental
dimensions, you are moving the tool by the dimensions.
Sign for incremental dimensioning
A relative dimension has a positive sign when the axis is moved in the
positive direction, and a negative sign when it is moved in the negative
direction.
8
X = 5 mm
Z = –35 mm
position
IX = 10 mm
IZ = –30 mm
65
:
1
2
:
1
2
35
1
3530
1
0
Z
5
15
X
Z
5
10
X
Page 9
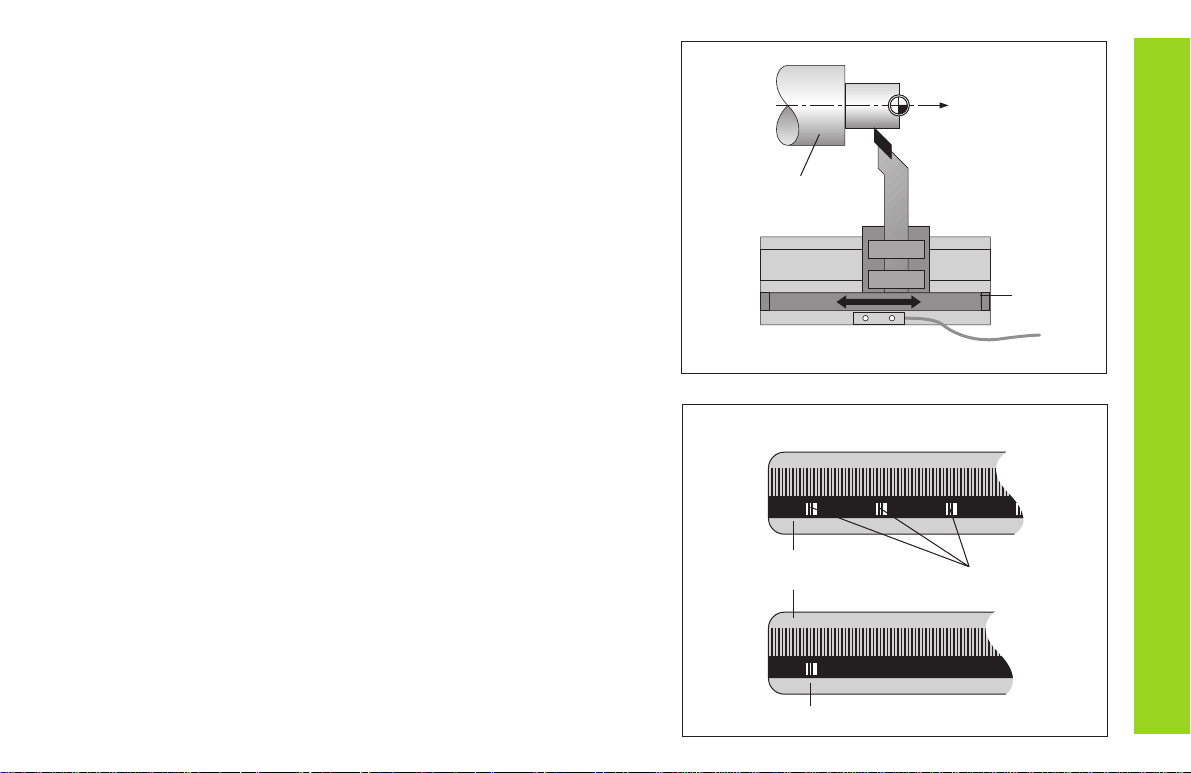
Position encoders
The position encoders on the machine convert the movements of the
machine axes into electrical signals. The ND display unit evaluates
these signals, determines the actual position of the machine axes and
displays the position as a numerical value.
If the power is interrupted, the relationship between the machine axis
positions and the calculated actual positions is lost. The reference
marks on the position encoders and the REF reference mark evaluation
feature enable the ND to quickly re-establish this relationship again
when the power is restored.
Reference marks
The scales of the position encoders contain one or more reference
marks. When a reference mark is crossed over, a signal is generated
identifying that position as a reference point (scale datum = machine
datum).
When this reference mark is crossed over, the ND's reference mark
evaluation feature restores the relationship between axis slide positions
and display values as you last defined it by setting the datum. If the
linear encoders have distance-coded reference marks, you need only
move the machine axes a maximum of 20 mm to restore the datum.
Workpiece
Scale in
linear encoder
Z
Fundamentals
Encoder
Distance-coded
reference marks
Reference mark
9
Page 10
Switch-On, Crossing Over the Reference Marks
➨➨
0
➨ 1
➨➨
REF ? ENT ...CL
ENT
PASS OVER REF.
Crossing over the reference marks stores the last relationship between
axis slide positions and display values for all datum points in nonvolatile
memory.
Note that if you choose not to cross over the reference marks (by
clearing the dialog REF ? with the CL key), this relationship will be
lost if the power is switched off or otherwise interrupted.
Switch-On, Crossing Over the Reference Marks
You must cross over the reference marks if you want to use
the multipoint axis error compensation feature.
(See “Multipoint Axis Error Compensation”)
Turn on the power (switch located on rear
panel). REF and decimal points blink.
Press ENT before crossing reference marks.
Cross over the reference marks in all axes (in any
sequence). Each axis display becomes active
when its reference mark is crossed over.
10
Page 11

Switching Between Operating Modes
You can switch between the operating modes
Distance-To-Go, Special Functions, Program Input,
Set Tool Datum, Hold Position and Parameter Input
at any time simply by pressing another operating
mode key.
Switching Between Operating Modes
11
Page 12
Selecting Radius or Diameter Display
Your ND can display positions in the cross slide as a diameter or as a
radius. Drawings of lathe parts usually indicate diameters. When you
are turning the part, however, you infeed the tool in the cross slide
axis in radius values.
Example Radius display, position X = 20 mm
Diameter display, position X = 40 mm
To switch the display
Z
¯40
1
20
X
➤ Press
R
x
When radius display for the X axis is selected, RX lights up.
When diameter display is selected, R
Selecting Radius or Diameter Display
12
goes out.
X
Page 13
Separate Value/Sum Display (ND 970 only)
Separate value display
In this mode the positions of the saddle and top slide are displayed
separately. The position displays are referenced to the datum points
that you set for the Zo and Z axes. When an axis slide moves, only the
position display for that axis changes.
Sum display
In this mode the position values of both axis slides are added together.
The sum display shows the absolute position of the tool, referenced to
the workpiece datum.
40
Z
Z
0 +10 +25
Z
Z
0
Example Separate value display: Z = +25.000 mm
(see illustra-) Zo = +15.000 mm
tion at right) Sum display: Z
= +40.000 mm
S
The sum display will only show correct values if the actual
position values of both axis slides were correctly added and
entered (with sign) when setting the datum for the “sum.”
To switch over the display:
➤ Press
S
z
When the ND 970 displays sums, the Zo display is switched
off.
Z
0
Ð10
0 +15
Separate Value/Sum Display (ND 970 only)
13
Page 14
Datum Setting
If you want datum points to be stored in nonvolatile memory,
you must first cross over the reference marks.
Note that the correct value to be entered for the datum in the
X axis depends on whether you have selected radius or
diameter display.
Datum Setting
You can set one absolute workpiece datum and data for up to 99 tools
(i.e., relative datums).
Setting the absolute workpiece datum
When you enter a new value for the absolute workpiece datum, all tool
data are then based on the new workpiece datum.
Touch the workpiece with the tool.
Z=0
Z
14
Z
DATUM Z =
ENT
0
Enter further axes in the same manner.
Select the axis, for example Z.
Enter the position of the tool tip (for example,
0 mm) and confirm with ENT.
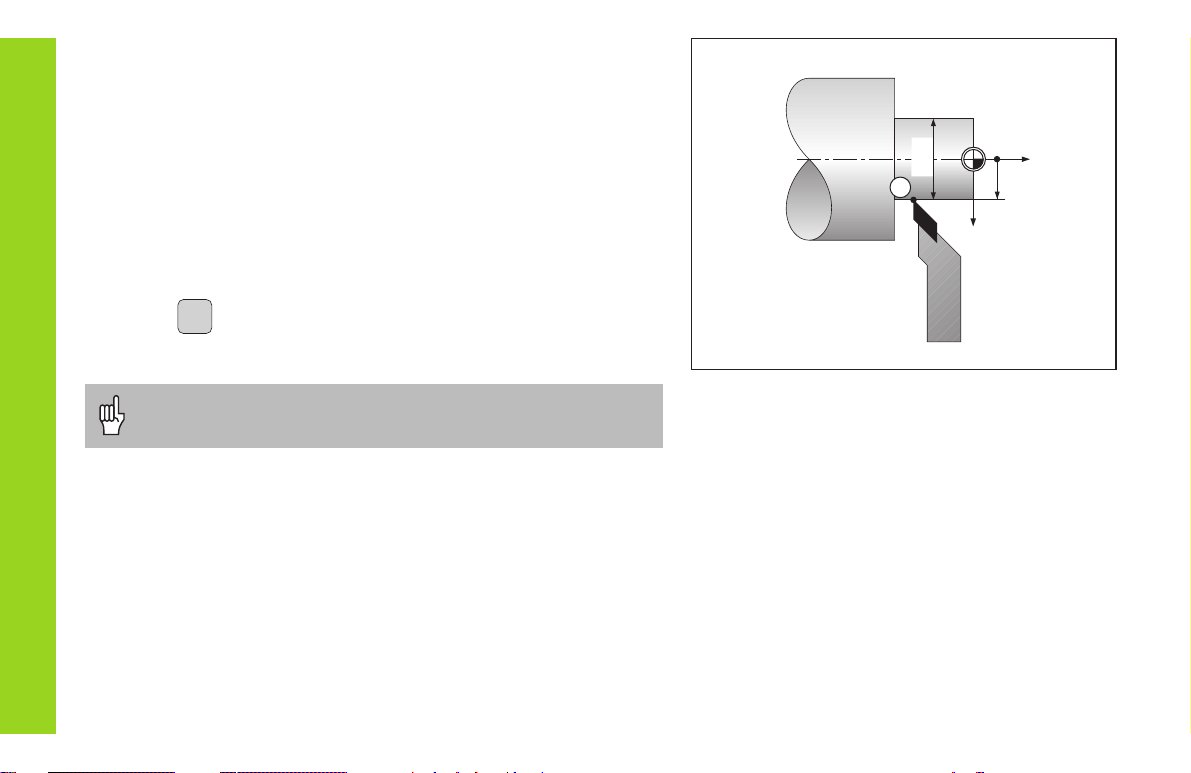
Page 15
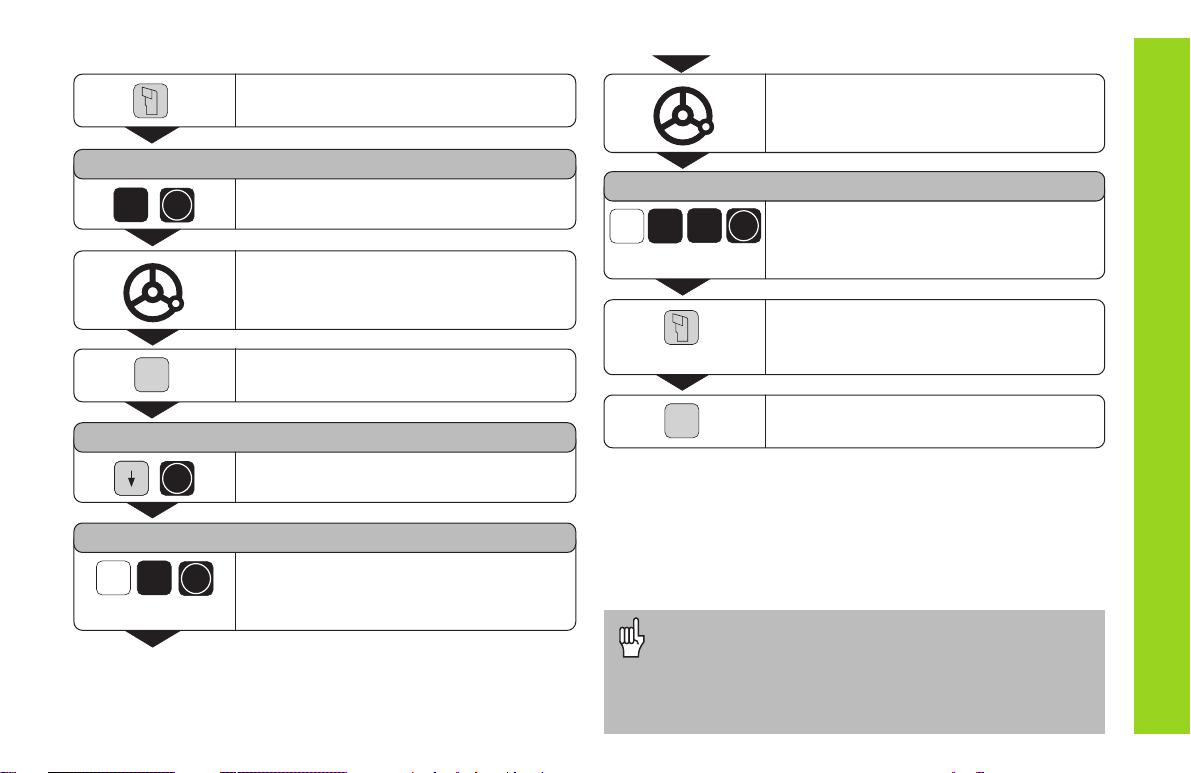
To enter tool data (relative datums)
TOOL NUMBER =
ENT
3
SPEC
FCT
SET TOOL ?
ENT
SET TOOL Z =
ENT
0
Z
•
•
•
Select the tool.
Enter the tool number (for example 3)
and confirm with ENT.
Touch the workpiece with the tool.
Select Special Functions.
Select Set Tool and confirm with ENT.
Select the axis (for example Z), enter
the position of the tool tip (for example
0 mm), and confirm with ENT.
Touch the workpiece or turn the first
diameter.
SET TOOL Z =
X
the position of the tool tip (for example
Select the axis (for example X), enter
ENT
0
2
20 mm), and confirm with ENT.
To set additional tools, change the tool,
select a new tool number and enter
the data for the next tool.
2 x
SPEC
FCT
End the function.
• When you work with the sum display, also set the
tool data when the sum display is active (ND 970
only).
• Use the CL key to go back one level in the special
functions.
Datum Setting
15
Page 16

Resetting all axes to zero
You can reset all axes to zero by pressing a single key. The last actual
position then becomes the relative datum and is not stored (incremental positioning), and the status display shows “– –” instead of the tool
number. Any tool datums already set remain in memory. You can
activate these by entering the corresponding tool number.
Example: Finish-turning steps
Datum Setting
Move to position
.
1
Reset all axes to zero.
Move to position 2 first in Z and then in X.
The display shows the drawing dimensions
(for example, X+7 and Z–15).
Reset all axes to zero.
Move to position
first in Z and then in X.
3
The display shows the drawing dimensions
(for example, X+3 and Z–20).
20 15
Z
5
1
2
3
7
3
X
16
Page 17

Holding Positions
If you want to measure the workpiece after turning the first diameter,
your display unit has to capability to “freeze” (hold) the actual position
before you retract the tool.
?
Z
HOLD
POS
KEEP X POS. ?
ENT
X
SET POS. X =
ENT
21
HOLD
POS
Turn the first diameter, for example in the X
axis.
Select the HOLD POSITION function.
Select the axis (for example X) whose position is
to be held, and confirm with ENT.
Retract the tool. The X axis display remains
stopped. Measure the workpiece.
Enter the measured position, for example
12 mm, and confirm with ENT. The display
shows the current tool position.
End the function.
?
1
X
Holding Positions
2
17
Page 18

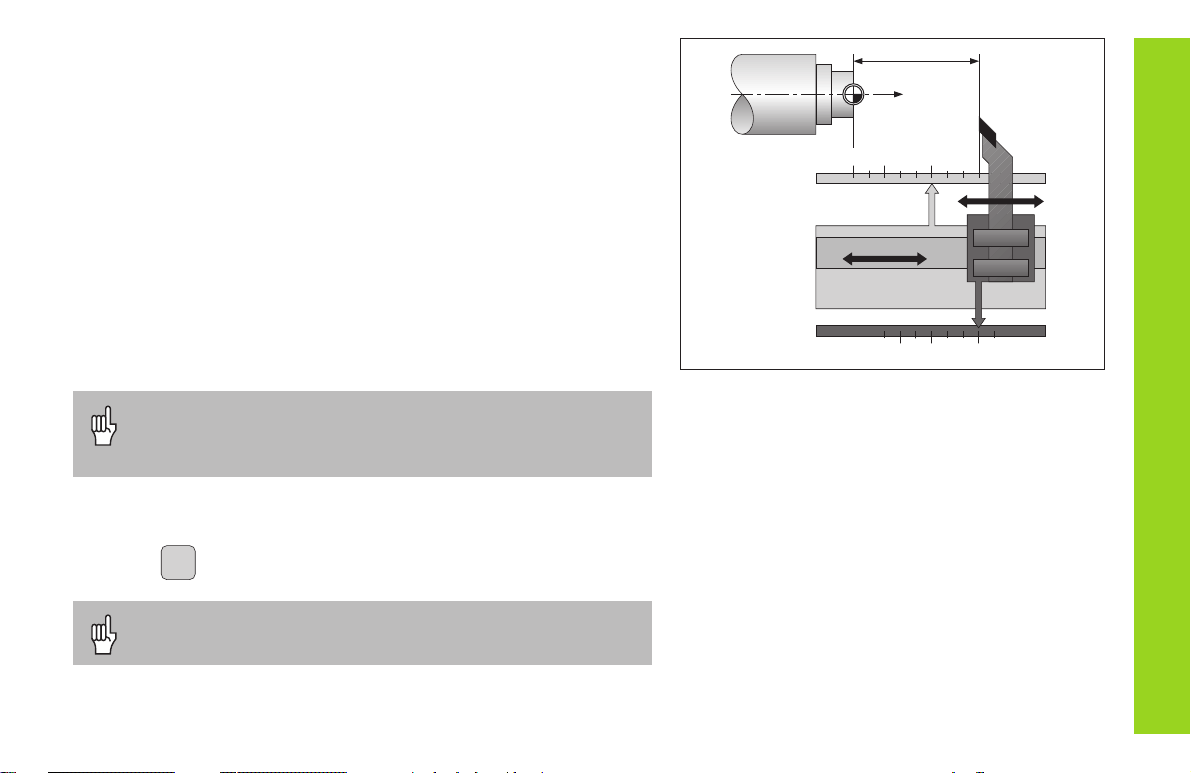
Moving the Axes with the Distance-To-Go Display
Normally, the display shows the actual position of the tool. However, it
is often more helpful to display the remaining distance to the nominal
position (the distance-to-go). You can then position simply by moving
the axis until the display value is zero.
You can enter the absolute or the relative (incremental) coordinates in
the distance-to-go display.
Example: Finish-turning a shoulder
Select the distance-to-go function.
The ∆ symbol lights up.
NOML. VALUE X =
Select the axis (e.g., X), enter the nominal
ENT
5
1
X
Moving the Axes with Distance-To-Go
NOML. VALUE X =
0
2
Z
ENT
coordinate (e.g., 15 mm) (radius), confirm entry.
Move the X axis until the display value is zero.
The tool is at position
Select the axis (e.g., Z), enter the nominal
coordinate (e.g., –20 mm), and confirm entry.
.
1
20
0
Z
2
1
15
5
3
X
18
•
•
Page 19

Move the Z axis until the display value is zero.
The tool is at position
NOML. VALUE X =
Select the axis (for example X), mark as
ENT
5X
• If an oversize is active (see “Turning with Oversizes”),
OVERSIZE ON will appear in the message field when you
select the distance-to-go mode (clear the message with the
CL key).
• For the oversize to be correctly applied you must enter the
first nominal coordinate as an absolute dimension.
• Oversizes are applied correctly only in the sum display.
incremental dimension, enter the nominal
coordinate (such as 5 mm) (radius), and confirm.
Move the X axis until the display value is zero.
The tool is at position .
End the distance-to-go mode.
The ∆ symbol goes out.
.
2
3
Moving the Axes with Distance-To-Go
19
Page 20

Turning with Oversizes
Your ND display unit can automatically take oversizes into account in
the distance-to-go mode when the Oversize function is activated. Each
axis can have a different oversize.
Z
To active the oversize function
SPEC
FCT
SET TOOL ?
Turning with Oversizes
OVERSIZE ?
ENT
OVERSIZE OFF
ENT
SPEC
FCT
Remember: oversizes are correctly compensated only for
20
movement toward the contour.
X
Select Special Functions.
Select the Oversize function.
Confirm selection.
Switch oversize on or off. The message field
then displays OVERSIZE ON or OVERSIZE OFF.
End the function.
Page 21

To enter an oversize
SPEC
FCT
Select Special Functions.
SET TOOL ?
Select the Oversize function.
OVERSIZE ?
ENT
Confirm selection.
OVERSIZE ON
If required, activate Oversize.
Press the arrow down key.
OVERSIZE X ?
ENT
1
X
SPEC
FCT
Select the axis (for example X), enter the
oversize (for example 1 mm), confirm with ENT.
End the function.
• If the Oversize function is active, this will be indicated by a
message in the message field when you activate the
distance-to-go mode.
• Use the CL key to go back one level in the special functions.
Turning with Oversizes
21
Page 22

Taper Calculator
The taper calculator enables you to calculate the angle for the top slide.
There are two possibilities:
• Calculation from the taper ratio:
- Difference between the taper radii to the length of the taper
1:3
Taper Calculator
• Calculation from two diameters and the length:
- Starting diameter
- Final diameter
- Length of the taper
Calculation from the taper ratio
SPEC
FCT
SET TOOL ?
TAPER CALCULTR ?
ENT
•
•
•
22
Select Special Functions.
Select Taper Calculator.
Confirm selection.
Page 23

TAPER RATIO ?
ENT
1. VALUE ?
1
2. VALUE ?
3
ANGLE = 18.435
Confirm selection.
Enter the first value (for example, 1) and confirm
with the arrow down key.
Enter the second value (for example, 3), confirm
with the arrow down key (length of taper is
three times as large as radius difference).
The result is displayed in the message field.
Taper Calculator
SPEC
FCT
• You can change entered values later by selecting them
with the arrow keys.
• Use the CL key to go back one level in the special functions.
End the taper calculator.
23
Page 24

Calculation from two diameters and the length
SPEC
FCT
SET TOOL ?
Taper Calculator
TAPER CALCULTR ?
ENT
TAPER RATIO ?
TAPER DIMENS. ?
ENT
•
•
•
Select Special Functions.
Select the taper calculator.
Confirm selection.
Select Taper Dimensions.
Confirm selection.
20
30
10
24
Page 25

DIA. RIGHT =
01
DIA. LEFT =
2 0
LENGTH =
3 0
ANGLE = 9.462
SPEC
FCT
• You can change entered values later by selecting them
with the arrow keys.
• Use the CL key to go back one level in the special functions.
Enter value (for example, 10 mm) and confirm
with the arrow down key.
Enter value (for example, 20 mm) and confirm
with the arrow down key.
Enter value (for example, 30 mm) and confirm
with the arrow down key.
The result is displayed in the message field.
End the taper calculator.
Taper Calculator
25
Page 26

Multipass Cycle
The multipass cycle allows you to turn a shoulder in any number of
infeeds. This cycle is defined and executed in the special functions.
30
0
Define cycle and execute
Multipass Cycle
SPEC
SET TOOL ?
MULTIPASS ?
ENT
NOML. VALUE X =
1
26
FCT
Select Special Functions.
50
Select multipass cycle.
10
Z
X
Confirm selection.
0
Enter nominal value for X, such as 10 mm
(diameter), and confirm with arrow down key.
•
•
•
Page 27

NOML. VALUE Zs=
3
0
START ?
ENT
MOVE AXES
SPEC
FCT
• When the multipass cycle is activated, the ND 970
automatically switches to the sum display.
• Use the CL key to go back one level in the special functions.
Enter the nominal value for Zs (such as –30 mm)
and confirm with the arrow down key.
Press ENT to start the multipass cycle. Use the
arrow down key if you need to correct your
entries.
If you confirmed START with the ENT key, you
can now turn the shoulder in any number of
infeeds by moving to display value zero.
End the multipass cycle.
Multipass Cycle
27
Page 28

Program Input
For small-lot production you can enter the sequence of positioning
steps in the Program Input mode (PGM key). Up to 99 positioning
steps are possible. The program remains in memory even when the
power is switched off or otherwise interrupted.
The display unit goes into sum display mode (ND 970 only) and
Program Input
distance-to-go mode when Program Input is activated. You can move
to the entered positions simply by traversing to display value zero. The
program blocks can be entered in absolute or incremental dimensions.
The ∆ symbol in the status display blinks until a block is completely
entered. When you alter program blocks, the display values are
updated as soon as you press ENT.
You can start from any positioning block in a finished program.
Example: Turning shoulders
Select Program Input.
Select the axis (for example, Z), enter the
ENT
nominal coordinate (for example, 15 mm) and
confirm with ENT.
AXIS ?
Z
PGM
0
35
20
10
20
30
28
•
•
•
Page 29

If you are doing actual machining, traverse the Z
axis until the display value is zero.
Select the next step.
AXIS ?
Select the axis (such as X), enter the coordinate
X
1
Enter further blocks in the same manner.
ENT
0
(such as 10 mm) (diameter), confirm entry.
If you are doing actual machining, traverse the X
axis until the display value is zero.
The complete program:
1Zs= +0
2 X = +10
3Zs= –20
4 X = +20
IZs= –35
5
6 X = +30
Program Input
29
Page 30

Deleting programs, deleting blocks, inserting empty blocks
Program Input is active.
Select the deleting/inserting functions.
Program Input
DELETE BLOCK ?
30
ENT
With the arrow keys, select the desired function
(for example, DELETE BLOCK).
Press ENT to start the function.
Page 31

Error Messages
Message Problem
AMPL. X TOO LOW The encoder signal is too weak.
The scale may be contaminated.
INPUT ERROR The entered value is not within
the permissible input range.
ERROR: REF. X The spacing of the reference
marks as defined in P43 is not
the same as the actual spacing.
FRQ. EXCEEDED X The input frequency for this
encoder input is too high. This
can occur when the scale is
moved too fast.
COMP. DELETED Compensation values for non-
linear axis error compensation
erased.
PARAM. ERASED Check the operating parameters.
If this error recurs, contact your
service agency.
PGM ERASED The program has been deleted.
If this error recurs, contact your
service agency.
PGM TOO LARGE The maximum program length is
99 blocks.
Message Problem
OFFSET DELETED Offset compensation values for
encoder signals erased.
PRESET ERASED The datum points have been
erased. If this error recurs,
contact your service agency.
KEY W/O FUNCTION This key currently has no
function.
TEMP. EXCEEDED The temperature of the ND is too
high.
To clear error messages
When you have removed the cause of the error,
➤ press the CL key.
Error Messages
31
Page 32

Items Delivered
• ND 930
or
• ND 970 for three axes
• Power connector
Id.-Nr. 257 811 01
for two axes
Items Delivered
• User's Manual
Optional accessories
• Tilting base
Id.-Nr. 281 619 01
32
Page 33

Part II: Installation and
Specifications
Connections on Rear Panel 34
Power Connection 35
Mounting 35
Connecting the Encoders 36
Operating Parameters 37
Linear Encoders 40
Setting the display step 40
Display step, signal period and subdivision 40
Compatible HEIDENHAIN linear encoders 41
Multipoint Axis Error Compensation 42
Specifications 45
Dimensions 46
Part II: Installation and Specifications
33
Page 34

Connections on Rear Panel
ID label
Connections on Rear Panel
Power switch
Power input
X3 X2 X1
34
Ground terminal
Connections X1, X2, X3, are not shock hazardous according to EN 50178.
Encoder inputs X1 to X3
Rubber feet with M4 thread
Page 35

Mounting
To mount the display unit on a support, use the M4 threaded holes in
the rubber feet. You can also mount the display unit on the optional
tilting base.
Power Connection
Tilting base
H
E
I
D
E
N
H
A
IN
Hot leads: and
L
N
Protective ground:
• Danger of electrical shock!
Connect a protective ground. This connection must
never be interrupted.
• Unplug the power cord before opening the housing.
To increase the noise immunity, connect the ground terminal
on the rear panel to the central ground point of the machine.
(Minimum cross-section: 6 mm
2
)
The display unit will operate over a voltage range of 100 V to 240 V AC.
A voltage selector is not necessary.
Danger to internal components!
Use only original replacement fuses.
Two line fuses and a fuse for the switching outputs are inside
the housing.
Fuse types: Line: F 2.5 A 250 V
Switching outputs: F 1 A
Support
Power Connection / Mounting
35
Page 36

Connecting the Encoders
Your display unit will accept all HEIDENHAIN linear encoders with
sinusoidal output signals (11 to 40 µA
reference marks.
Assignment of the encoder inputs for the ND 930
Encoder input X1 is for the X axis
Encoder input X2 is for the Z axis
Assignment of the encoder inputs for the ND 970
Encoder input X1 is for the X axis
Encoder input X2 is for the Zo axis
Encoder input X3 is for the Z axis
Connecting the Encoders
Encoder monitoring system
Your display unit features a monitoring system for checking the
amplitude and frequency of the encoder signals. If it detects a faulty
signal, one of the following error messages will be generated:
AMPL.X TOO LOW
AMPL.X TOO HIGH
FRQ. EXCEEDED X
Encoder monitoring can be activated with parameter P45.
If you are using linear encoders with distance-coded reference marks,
the encoder monitoring system also checks whether the spacing of the
reference marks as defined in parameter P43 is the same as the actual
spacing on the scales. If it is not, the following error message will be
generated:
36
ERROR: REF. X
) and distance-coded or single
pp
X3 X2 X1
ZXZo
Page 37

Operating Parameters
Entering and changing operating parameters
Operating parameters allow you to modify the operating
characteristics of your display unit and define the evaluation of
the encoder signals. Operating parameters that can be
changed by the user are called user parameters, and can be
accessed with the MOD key and the dialog PARAMETER
(user parameters are identified as such in the parameter list).
The full range of parameters can only be accessed through
CODE NUMBER.
Operating parameters are designated by the letter P and a
number. Example: P11. The parameter designation is shown
in the input field as you press the arrow keys to select a
parameter. The parameter setting is displayed in the message
field.
Some operating parameters have separate values for each
axis. Such parameters have an additional index number from 1
to 3 (ND 930: index 1 to 2).
Example P12.1 scaling factor, X axis
P12.2 scaling factor, Zo axis (ND 970 only)
P12.3 scaling factor, Z axis
Operating parameters P60 and P61 (definition of the switching
ranges) have an index from 0 to 7.
The operating parameters are preset before the unit leaves
the factory. These factory settings are indicated in the
parameter list in boldface type.
To access the operating parameters
➤ Press the MOD key
➤ Confirm with ENT to access the user parameters, or select
the dialog for entering the code number (95148) with the
arrow down key to be able to change all operating
parameters.
To page through the operating parameters
➤ Page forwards by pressing the arrow down key.
➤ Page backwards by pressing the arrow up key.
➤ Go directly to an operating parameter by pressing GOTO,
keying in the parameter number and then pressing ENT.
To change parameter settings
➤ Press the minus key or enter the value and confirm
with the ENT key.
To correct an entry
➤ Press CL. This restores the old value.
To leave the operating parameters
➤ Press MOD again.
Operating Parameters
37
Page 38
List of operating parameters
P1 Unit of measurement
1)
Display in millimeters mm
Display in inches inch
P11 Activate scaling factor
1)
Scaling factor active SCALING ON
Not active SCALING OFF
P12.1 to P12.3 Enter scaling factor
Enter a scaling factor separately for each axis:
Operating Parameters
Entry value > 1: workpiece will “grow”
1)
Entry value = 1: workpiece will remain the same size
Entry value < 1: workpiece will “shrink”
Input range: 0.111111 to 9.999999
Factory setting: 1.000000
P30.1 to P30.3 Counting direction
Positive counting direction with
positive direction of traverse COUNTR. X : POS.
Negative counting direction with
positive direction of traverse COUNTR. X : NEG.
P31.1 to P31.3 Signal period of encoder
2 µm / 4 µm / 10 µm / 20 µm / 40 µm
100 µm / 200 µm / 12
800 µm
P32.1 to P32.3 Subdivision of the encoder signals
128 / 100 / 80 / 64 / 50 / 40 / 20 / 10 / 5 / 4 / 2 / 1 /
0.5 / 0.4 / 0.2 / 0.1
P40.1 to P40.3 Define axis error compensation
Axis error compensation not active AXIS COMP X OFF
Linear axis error compensation active LINEAR COMP. X
Multipoint axis error comp. active AXIS COMP X F(a)
(See “Multipoint Axis Error Compensation”)
P41.1 to P41.3 Linear axis error compensation
Input range (µm): −99999 to +99999
Factory setting: 0
Example Displayed length Ld = 620.000 mm
Actual length (as determined for example with
the VM 101 from HEIDENHAIN)
La = 619.876 mm
Difference ∆L = La – Ld = –124 µm
Compensation factor k:
k = ∆L/Ld = –124 µm/0.62 m = –200 [µm/m]
38
1)
User parameter
Page 39

P43.1 to P43.3 Reference marks
One reference mark 0
Distance-coded with 500 x SP 500
Distance-coded with 1000 x SP 1000
Distance-coded with 2000 x SP 2000
Distance-coded with 5000 x SP 5000
(SP = signal period)
P44.1 to P44.3 Reference mark evaluation
Reference mark evaluation active REF. MODE X ON
Not active REF. MODE X OFF
P45.1 to P45.3 Encoder monitoring
Amplitude and frequency
monitoring active ALARM X ON
Not active ALARM X OFF
P48.1 to P48.3 Activate axis display
Axis display active AXIS DISPL.X ON
Not active AXIS DISPL.X OFF
P81.1 to P81.3 Encoder
Max. encoder signal 16 µA
Max. encoder signal 40 µA
P98 Dialog language
1)
pp
pp
ENCODER X 16µA
ENCODER X 40µA
German DIALOG LANG. D
English DIALOG LANG. US
French DIALOG LANG. F
Italian DIALOG LANG. I
Dutch DIALOG LANG. NL
Spanish DIALOG LANG. E
Danish DIALOG LANG. DK
Swedish DIALOG LANG. S
Czech DIALOG LANG. CZ
Japanese DIALOG LANG. J
Operating Parameters
1)
User parameter
39
Page 40

Linear Encoders
Display step, signal period and subdivision for linear encoders
Setting the display step with linear encoders
The display step depends on the
• signal period of the encoder (P31) and the
• subdivision (P32).
Both parameters are entered separately for each
Linear Encoders
axis.
For linear measurement using nut/ballscrew
arrangements and rotary encoders, calculate the
signal period as follows:
Signal period [µm] =
Drivescrew pitch [mm] x 1000
Line count
Display step P31: Signal period [µm]
2 2
2
2 2
[mm] [inches] P32: Subdivision
0.000 02 0.000 001 100 –––––– –
0.000 05 0.000 002 40 80 –– – – – –
0.000 1 0.000 005 20 40 100 –––– –
0.000 2 0.000 01 10 20 50 100 ––– –
0.000 5 0.000 02 4 8 20 40 80 –– –
0.001 0.000 05 2 4 10 20 40 100 ––
0.002 0.000 1 1 2 5 10 20 50 100 –
0.005 0.000 2 0.4 0.8 2 4 8 20 40 –
0.01 0.000 5 0.2 0.4 1 2 4 10 20 –
0.02 0.001 ––0.5 1 2 5 10 –
0.05 0.002 ––0.2 0.4 0.8 2 4 –
0.1 0.005 ––0.1 0.2 0.4 1 2 128
0.2 0.01 –––––––64
4 10 20 40 100 20012800 4 10 20 40 100 20012800
4 10 20 40 100 20012800
4 10 20 40 100 20012800 4 10 20 40 100 20012800
40
Page 41

Compatible HEIDENHAIN linear encoders
Encoder Signal Ref. Display step Sub-
period marks division
P31 P43 mm inches P32
LIP 40x 200.001 0.000 05 2
0.000 5 0.000 02 4
0.000 2 0.000 01 10
0.000 1 0.000 005 20
0.000 05 0.000 002 40
0.000 02 0.000 001 100
LIP 101
LIP 101
LIF 101
LIF 101
LF 401 0 0.000 2 0.000 01 20
LF 401
LID xxx 10 0 0.001 0.000 05 10
LID xxx
LS 103 10 0 0.000 2 0.000 01 50
LS 103 C or 0.000 1 0.000 005 100
LS 405 1000
LS 405 C
ULS/10
A 400.001 0.000 05 4
R 0.000 5 0.000 02 8
0.000 2 0.000 01 20
0.000 1 0.000 005 40
0.000 05 0.000 002 80
R 400.001 0.000 05 4
C 5000 0.000 5 0.000 02 8
C 5000 0.000 1 0.000 005 40
C 2000 0.000 5 0.000 02 20
Encoder Signal Ref. Display step Sub-
period marks division
P31 P43 mm inches P32
LS 303 20 0 0.01 0.000 5 2
LS 303
LS 603 1000
LS 603
LS 106 20 0 0.01 0.000 5 2
LS 106
LS 406 1000 0.002 0.000 1 10
LS 406
LS 706 0.000 5 0.000 02 40
LS 706 C
ULS/20
LIDA 10x 40 0 0.002 0.000 1 20
LB 302 or 0.001 0.000 05 40
LIDA 2xx 100 0 0.01 0.000 5 10
LB 3xx 0.005 0.000 2 20
LB 3xx
LIM 102 12800 0 0.1 0.005 128
C or 0.005 0.000 2 4
C
C or 0.005 0.000 2 4
C 0.001 0.000 05 20
2000 0.000 5 0.000 02 80
C 1000 0.002 0.000 1 50
0.001 0.000 05 100
Linear Encoders
41
Page 42

Multipoint Axis Error Compensation
Entries in the compensation value table
If you want to use the multipoint axis error compensation feature, you must
• activate this feature with operating parameter P40
(see "Operating Parameters")
• traverse the reference marks after switching on the
display unit.
• enter compensation value table
Your machine may have a non-linear axis error due to factors
such as axis sag or drivescrew errors. Such deviations are
usually measured with a comparator measuring system. This
allows you to determine, for example, the screw pitch error
[X = F(X)] for the X axis. The display value is then automatically
compensated by the error associated with the current position.
An axis can only be corrected in relation to one axis causing
the error. You can create a compensation value table for each
axis, with each table containing 64 compensation values. The
Multipoint Axis Error Compensation
tables can then be accessed with the MOD key and CODE
NUMBER.
42
• Axis to be compensated: X, Z or Zo
(Zo only with ND 970)
• Axis with error: X, Z or Zo
(Zo only with ND 970)
• Datum for the axis to be corrected:
Here you enter the point starting at which the axis with
error is to be corrected. This point indicates the absolute
distance to the reference point.
Do not change the datum point after measuring the
axis error and before entering the axis error into the
compensation table.
• Spacing of the compensation points
The spacing of the compensation points is expressed as
Enter the value of the exponent x into the compensation
value table.
Minimum input value: 6 (= 0.064 mm)
Maximum input value: 20 (= 1052.672 mm)
Example: 600 mm traverse and 35 compensation points:
results in 17.143 mm spacing between points.
Nearest power of two: 2
Entry in compensation value table: 14
• Compensation value
You enter the measured compensation value (in
millimeters) for the displayed compensation point.
Compensation point 0 always has the value 0 and
cannot be changed.
2
x
[µm].
14
[µm] = 16.384 mm
Page 43

To select the compensation value table and enter an axis
correction
MOD
PARAMETER ?
ENT
CODE NUMBER ?
1
0
5 2
ENT
6
9
COMP. AXIS = X
X
X = FCT (Z )
Z
Press MOD.
Select dialog for entering the code
number.
Enter 105296 and confirm with ENT.
Select the axis to be corrected (e.g.,
cross slide X), and confirm.
Enter the axis causing the error (e.g.,
saddle Z) and confirm.
•
•
•
DATUM Z =
2
7
POINT SPACING Z=
0
1
X 27.000 X =
0
0
1
X 28.024 X =
Enter all further compensation points. If you press and hold
the arrow down key when selecting the next compensation
point, the number of the current compensation point will be
displayed in the input line. You can go directly to compensation points by using the GOTO key and entering the
corresponding number.
MOD
Enter the active datum for the error on
the axis to be corrected (e.g., 27 mm)
and confirm.
Enter the spacing of the compensation
points on the axis to be corrected, for
example 2
confirm.
Select compensation point no. 1, enter
the associated compensation value (e.g.,
0.01 mm) and confirm.
Conclude entry.
10
µm (equals 1024 mm) and
Multipoint Axis Error Compensation
43
Page 44

To delete a compensation value table
MOD
PARAMETER ?
ENT
CODE NUMBER ?
1
0
5 2
ENT
6
9
COMP. AXIS = X
Multipoint Axis Error Compensation
Z
DEL.COMP.AXIS Z?
ENT
COMP.AXIS = Z
MOD
Press MOD.
Select the dialog for entering the code
number.
Enter 105296 and confirm with ENT.
Select the compensation value table
(e.g., for the Z axis), and delete the table.
Confirm with ENT, or cancel with CL.
Conclude entry.
44
Page 45

Specifications
Housing Bench-top design, cast metal
Dimensions (W x H x D):
300 mm x 200 mm x 108 mm
Operating temp. 0° to 45°C (32° to 113°F)
Storage temp. –30°to 70°C (–22 to 158°F)
Weight Approx. 3 kg
Relative humidity <75% annual average
<90% in rare cases
Power supply 100 V to 240 V (−15% to +10%)
48 Hz to 62 Hz
Power consumption ND 970: 19 W
ND 930: 17 W
Protection IP 40 (IEC 529)
Encoder inputs Encoders with 7 to 16 µApp or
16 to 40 µA
accepted.
Grating period: 2, 4, 10, 20, 40, 100,
200 µm and 12.8 mm.
Reference mark evaluation for distancecoded and single reference marks.
Input frequency Max. 100 kHz with 30 m (66 ft) cable
Display step Adjustable (see “Linear Encoders”)
Tool datums 99 (nonvolatile)
Functions − Distance-to-go display
− Radius/diameter display
− Separate value/sum display
(ND 970 only)
− Memory for 99 program steps
− Hold position
− Set absolute datum
− Taper calculator
− Turning with oversizes
− Multipass cycle
− Scaling factors
output signals
pp
Specifications
45
Page 46

Dimensions in mm/inches
Specifications
200
7.87"
HEIDENHAIN
300
11.81"
X3 X2 X1
46
6
.24"
108+2
4.25"+.08"
M4 x 6
M4 x .24"
75
X
43.3
1.704"
92
3.622"
0
20
.79"
1"±.008"
25.5±0.2
2.95"
4
M
234.5±0.2
9.23"±.008"
260±0.2
10.24"±.008"
70±0.2
2.76"±.008"
30+0.5
1.18"+.02"
Tilting base
56
2.205"
15
.6"
.18"
8
.32"
4.5
92
3.622"
210 ± 0.2
8.268 ± .008"
240
9.45"
.18"
4.5
120 + 0.5
4.73 + .02"
38 ± 0.5
1.5 ± .02"
20°
Page 47

DR. JOHANNES HEIDENHAIN GmbH
Dr.-Johannes-Heidenhain-Straße 5
83301 Traunreut, Germany
{ +49/8669/31-0
| +49/8669/5061
e-mail: info@heidenhain.de
{ Service
{ TNC-Service
|+49/8669/98
+49/8669/
+49/8669/
99
31-12 72
31-14 46
e-mail: service@heidenhain.de
http://www.heidenhain.de
288 026-25 . SW05 . 2 . 5/99 . F&W . Printed in Germany . Subject to change without notice
 Loading...
Loading...