

FY-AHRS-1200B Instructions
Attitude and Heading Reference Systems
FY-AHRS-1200B
Instructions V1.0
Guilin FeiYu Electronic Technology Co., Ltd
Addr: 4th Floor,Yu Tai Jie Science&technology Building, Information Industry Park,
ChaoYang Road ,Qi Xing District , Guilin 541004, China.
Website: http://www.feiyudz.cn
E-mail: service@feiyu-tech.com
GuiLin FeiYu Electronic Technology Co., Ltd
Dear customers:
Hello! Thank you for the use of products of Guilin Feiyu Electronic Technology Co,
Ltd. to better use the product, before using please carefully read the instructions to
ensure the proper use and operation.
FY-AHRS-1200B is a high-performance strap down inertial navigation system that can
measure any point of orientation of the entire locomotive and vehicle in the 3D space. AHRS
could make high-precision positioning for any stationary or moving objects with angular velocity,
even short magnetic interference will not affect the heading accuracy of the AHRS. The system
can be carried out AHRS magnetic field calibration, to eliminate the hard and soft iron materials
motorcycles offset caused by magnetic fields.
Features:
1、Using high-performance all solid-state three-axis accelerometer, three-axis angular rate
sensors and three-axis magnetic field sensor.
2、Three axis 360-degree all-dimensional output of the attitude and heading, attitude and heading
data on a static accuracy of less than 0.5 degrees, the dynamic accuracy of less than 2
degrees.
3、 Built-in sensor auto-calibrate, can automatically compensate for the interference of
temperature drift, noise, external magnetic field, etc.
4、Super long time stability and fast dynamic response.
Application:
Ground Transportation
Robots
Aircraft
Video Camera ect.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 1
GuiLin FeiYu Electronic Technology Co., Ltd
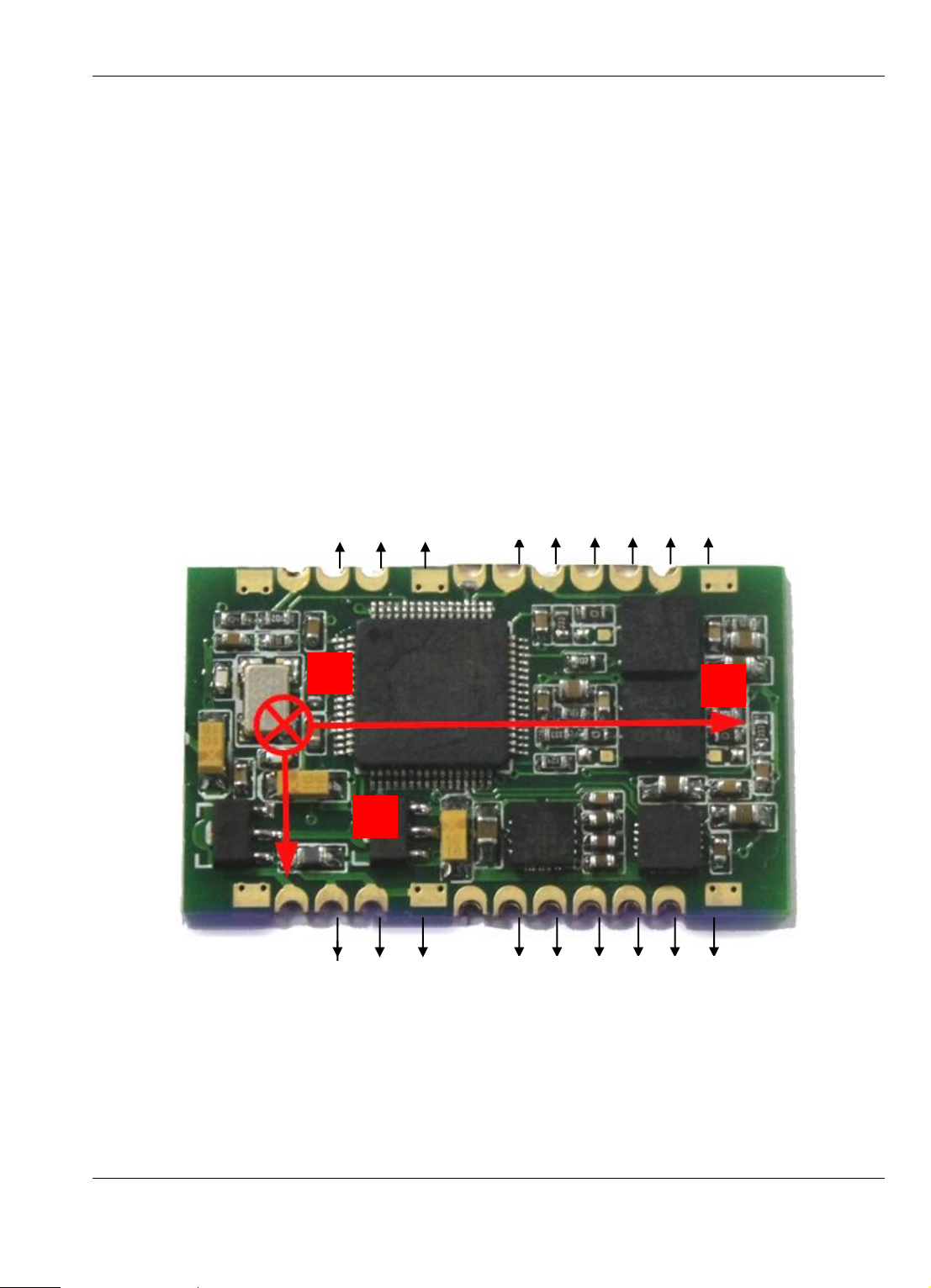
X
Y
Z
VCC
1 VCC
2 GND
3 GND
4 NOT USE
5 NOT USE
6 NOT USE
7 NOT USE
8 NOT USE
9 NOT USE
NOT USE 16
NOT USE 17
NOT USE 18
GND 13
GND 10
NOT USE 14
NOT USE 15
UART1 RX 12
UART1 TX 11
The AHRS includes three gyroscopes, three accelerometers and three magnetic field
meters. Real-time measure three axial angular velocity, acceleration, and magnetic field
strength.After the processing by the internal microprocessor, the AHRS outputs drift-free attitude
and heading information, the three-dimensional acceleration, three-dimensional angular velocity,
three-dimensional geomagnetic field, which have been compared and checked-off.
Dimensions and Interface Description:
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 2

GuiLin FeiYu Electronic Technology Co., Ltd
Specification
FY-AHRS-1200B
Remark
Performance
Refresh Rate(Hz)
1~100
The default refresh rate is
20Hz
Initialization Time(sec)
3 Heading
Output Range(deg)
0~360
Accuracy(deg)
±1
Compensation and Correction
Resolution(deg)
0.1
Attitude
Roll output range(deg)
±180
Pitch output range(deg)
±90
Static Accuracy(deg)
<0.5
Dynamic accuracy(deg RMS)
<2
Resolution(deg)
0.05
Angular velocity
Roll, Pitch ,Heading(deg/sec)
<1200
Optional range of different
Resolution(deg/sec)
<0.05
Typical application connection diagram
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 3

GuiLin FeiYu Electronic Technology Co., Ltd
Bandwidth(Hz)
100
Linear Acceleration
X, Y, Z axis measuring range(g)
±3 Deviation(mg RMS)
0.3 Bandwidth(Hz)
40 Magnetic field
X, Y, Z axis measuring range
(gauss)
±1.5
Output range
-2048~2047
0.769 MG/LSB
Bandwidth(Hz)
20 Environmental Indicators
Working temperature(℃)
-40~+70
Electrical indicators
Input voltage(V)
3.3V~6V
Recommended 5V
Input voltage(mA)
<80
Digital Output
TTL or RS232
(Optional)
Baud rate of output
4800~115200
The default baud rate is 19200
Physical index
Size(mm)
38×23×3
Length ×width× height
Weight(g)
5
FY-AHRS-1200B Interface Protocol
FY-AHRS-1200B Data output format description (standard RS-232, ASCII character
output):
Command head, field1, field 2, field 3, • • • • • •, the field n * checksum field (CRLF)
Between the fields with "," separated, each with a carriage return line feed end of the data.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 4

GuiLin FeiYu Electronic Technology Co., Ltd
Command
type
Command
head
Field 1
field 2
field 3
field 4
field 5
field 6
attitude data
$FYZT
Pitch
Roll
heading
X
angular
rate
Y
angular
rate
Z
angular
rate
field 7
field 8
field 9
field 10
field 11
field 12
field 13
Check
X
acceleration
Y
acceleration
Z
acceleration
resultant
acceleration
X
magnetic
field
Y
magnetic
field
Z
magnetic
field
* Check
value
Command
type
Command
head
Command
NO
Parameter
1
Paramete
r
2
parameter 3
parameter
4
Configure the
output refresh
rate
$Config
6
Refresh rate
settings,
Parameter setting
range
1 — 100
1, 100Hz
2, 50Hz
5, 20Hz
10, 10Hz
100,1Hz
NULL
NULL
NULL
Configure the
output baudrate
$Config
7
Baudrate
settings,
NULL
NULL
NULL
FY-AHRS-1200B attitude data format
FY-AHRS-1200B attitude data output example:
$FYZT,-0.92,-0.60,341.77,-0.15,0.14,0.11,0.02,-0.01,1.00,1.00,447.19,140.02,159.50*F4
Check value calculation method: arithmetic accumulate all data by-byte start from each "$" of
the data symbols (including the $) to the"*" (excluding “*”).
FY-AHRS-1200B Configuration Format Description (standard RS-232, ASCII character
input):
Command head, command NO, parameter1, parameter2,……,parameter n (CRLF).
Between the fields with "," separated, with a carriage return line feed end of each data.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 5

GuiLin FeiYu Electronic Technology Co., Ltd
Parameter setting
range
0 — 7
0,4800
1,9600
2,14400
3,19200
4,38400
5,56000
6,57600
7,115200
Configure
magnetic
declination
$Config
4
Setting of the
magnetic
declination,
Parameter setting
range
-360 — 360
For setting the
magnetic
deviation angle
and installed
heading bias
NULL
NULL
NULL
Open/Close the
FY -AHRS-120
0B serial data
output
$Config
9
Parameter setting
range
0 — 1
0,close
1,open
NULL
NULL
NULL
magnetic field
calibration
$Config
10
The magnetic
field calibration
options
1 — 2
1,Start calibration
XY-axis magnetic
field
2,Reserved.
After send this
command, must
clockwise rotate
FY -AHRS-1200B
NULL
NULL
NULL
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 6

GuiLin FeiYu Electronic Technology Co., Ltd
horizontally to
complete the
magnetic field
calibration
write the
configuration
information
in the FLASH
$Config
99
Is fixed at 1
Once configured,
send this
command to write
the configuration
information in the
FLASH
NULL
NULL
NULL
FY-AHRS-1200B attitude configure command example:
$Config,9,1 (CRLF)
Open the FY-AHRS-1200B serial data output
$Config,4,16 (CRLF)
Configure the FY-AHRS-1200B magnetic field deviation angle of 16 degrees.
$Config,99,1(CRLF)
Write the configuration information to the FLASH.
Attention:If there is any change of the configuration parameters ,you must click "Write FLASH"
button ,or chose menu"configuration"->permanent preserve configuration parameters",to writhe the
configuration to FLASH and pemanent preserve ,or next time power up ,these configuration parameter
will be lost .
——END——
be shown on our website www.feiyudz.cn.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Note: We reserve the right to change this manual at any time! And the newest edition will
Page 7
 Loading...
Loading...