

FY-41AP AutoPilot & OSD System
Guilin Feiyu Electronic Technology Co., Ltd
Addr : 4th Floor,YuTaiJie Science Technology Building,Information Industry
Park , ChaoYang Road ,Qi Xing District ,Gui Lin ,541004
Website: www.feiyu-tech.com
Email: service@feiyu-tech.com
Installation & Operation Manual
Applicable to the fixed wing
firmware V1.20 and above version

Guilin Feiyu Electronic Technology Co., Ltd.
Table of content
User Agreement ................................................................................................................................ 1
1. FY-41AP AutoPilot System Introduction ..................................................................................... 2
2. Function Introduction ................................................................................................................ 3
2.1 FY-41AP Single Module Function ....................................................................................... 3
2.2 FY-41AP with GPS function................................................................................................. 4
2.3 OSD Video Overlay System Function .................................................................................. 5
2.4 FY-41AP can be connected to a data link ........................................................................... 5
3. FY-41AP Configuration ............................................................................................................... 5
4. FY-41AP Connection Summary ................................................................................................... 7
5. S1~S8 Servo Interface Connection Instructions ......................................................................... 8
6. Connection Introduction ............................................................................................................ 8
7. Main Module Installation ......................................................................................................... 10
7.1 FY-41AP module installation ............................................................................................ 10
7.2 GPS module install ........................................................................................................... 11
7.3 Power manager module install ........................................................................................ 11
7.4 Power manager module install ........................................................................................ 11
7.5 Remote control setting: SW1&SW2 ................................................................................. 12
7.6 Gyroscope Reset ............................................................................................................... 12
7.7 FY-41AP indicator light instruction ................................................................................... 13
7.8. OSD interface instruction ................................................................................................ 14
8. FY-41AP Setting ........................................................................................................................ 15
9. FY-41AP first flight test checklist .............................................................................................. 28
10. Other functions and settings .................................................................................................. 30
10.1 Switch (SW2) function setting ..................................................................................... 30
10.2 RC Max Distance Setting.............................................................................................. 30
10.3 Circling Radius Setting ................................................................................................. 31
10.4 The altitude of Return To Launch instructions ............................................................ 31
10.5 FAIL-SAFE setting ......................................................................................................... 31
10.6 Fixed altitude & Heading lock Mode instruction ......................................................... 32
10.7 3D Mode instruction ................................................................................................... 33
10.8 Auto Circling Mode instruction ................................................................................... 33
10.9 Waypoint Navigation Flight Mode instruction ............................................................ 33
10.10 Link Mode (RC receiver control mode/Data radio control mode) ............................... 33
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com

Guilin Feiyu Electronic Technology Co., Ltd.
Dear Customer :
Thank you for choosing FY-41AP as your autopilot system. Please read this manual
carefully to ensure correct installation & operation. FY-41AP has fixed wing and Multi-rotor
version, you can choose fixed wing or Multi-rotor version by upgrading the firmware .
Now you are reading the manual of V1.20 firmware for fixed wing version.
User Agreement
The use of FY-41 AP is prohibited for any illegal intentions and purposes. The user
will be fully responsible for the use of this product and FY-Tech will not be held liable it's
misuse either in its original or altered state by the customer (including the direct, indirect,
or third party losses caused by a faulty plane or plane crash).
Please read this manual carefully before using this product. If you have any questions,
do freely contact us and we will attempt to provide you with a satisfactory clarification
and/or resolution should it be required. The products‘ functions maybe changed only by
firmware upgrades which is available from our website from time-to-time. Please do check
our website for available firmware upgrades. The company reserves the right to alter the
contents of the product firmware.
This agreement takes immediate effect upon the purchase of the product.
Attention
The installation and use of this device require some skill and knowledge in flying
remote controlled aircraft.
If you are a complete beginner & have never flown one before, we do not recommend
you install this device on your own. Please find an experienced RC pilot who may provide
you with the basic knowledge required to use this device successfully.
If you are already an experienced flyer, you will find the FY-41AP installation to be
easy & logical. Follow this manual & you won‘t go wrong.
If you need further technical support, contact us at: service@feiyu-tech.com
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 1

Guilin Feiyu Electronic Technology Co., Ltd.
1. FY-41AP AutoPilot System Introduction
FY -41AP Module
FY-41AP is an inertial attitude measurement instrument used for FPV flight on
fixed-wing aircrafts and multi-rotors aircrafts. It has an integrated OSD video overlay
system that presents critical flight information such as power management, airspeed,
altitude, and flight direction via its electronic compass, allowing for a clear visual flight
while ensuring key information is within sight.
The new FY-41AP with its enhanced Altitude Control and GPS module, can now
realize improved pinpoint inertial navigation and automatic piloting.
Flight stabilization is achieved via an integrated 3 axis gyro, 3 axis accelerometer, 3
axis magnetometer and a barometric pressure sensor. This enables the module to
accurately measure flight attitude, earth azimuth & relative altitude to achieve:
Extremely stable conventional flight pattern
Stabilized 3D flight
Automatically return to home (RTL)
Fixed altitude flight
Heading lock flight
GPS waypoint flight
Auto circling over a fixed GPS location.
GPS Module
GPS module– enables the FY-41AP to calculate the flight course & sense the exact
location of the aircraft. GPS Data allows aircraft return to home (RTL), Auto Circle, Fixed
altitude, Heading lock flight and fully autonomous flight via GPS waypoints setting.
Airspeed Module
The Airspeed Sensor included enables the system to automatically control airspeed
via throttle management and prevents the aircraft from stalling and ensures a stabilized
flight.
Compared to GPS the Airspeed Sensor reacts quicker and is affected less by the
wind.
OSD System
FY-41AP has integrated OSD hardware with optimizing display interface. Critical flight
parameters are displayed like Altitude, Speed, Direction, flying voltage and Amp draw, and
most display parameter outlay can be changed via RC control.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 2

Guilin Feiyu Electronic Technology Co., Ltd.
Power Manager Module
FY-41AP can connect Power Manager Module which is integrated with Current
Sensor module and Voltage-Regulating module. Current Sensor is used to check voltage,
Amp draw. The integrated Voltage-Regulating module provides stable +12V to FPV video
camera and video transmitter.
Altitude Control
Altitude control - is achieved using a high sensitivity barometric sensor which
measures relative height. Altitude is fixed via elevator servo control and throttle
management.
Heading Control
Heading control – is achieved by utilizing the three axis magnetometer, which senses
the aircraft heading angle. Both the aileron & rudder servo is used to control flight heading.
GPS data is used to automatically correct heading even in windy conditions.
Speed Control
The airspeed information is made available when using with the GPS module. For
more accurate airspeed information, the included Airspeed Sensor should be connected
to FY-41AP.FY-41AP, will automatically select the airspeed reading from the latter and
display within the telemetry information.
2. Function Introduction
2.1 FY-41AP Single Module Function
● Activated Mode In this mode, the FY-41AP auto stabilization is turned off. The
aircraft is completely under pilot control.
● Stabilized Mode Level flight is automatically maintained, making flight simple,
especially for beginners. If a pilot feels the plane is out of control, simply reduce input
control and the plane will automatically recover level flight.
● 3D Mode If no input is given by the pilot (all sticks in the middle position), 3D
mode will lock the current aircraft attitude. Therefore the aircraft can be easily
maneuvered to complete a variety of 3D flight with added stability & smoothness.
● Fixed altitude & Heading lock Mode This mode maintains aircraft flight course
& holds the altitude on activation. By using GPS data, the system automatically corrects
flight course deviation & maintains straight-line flight.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 3

Guilin Feiyu Electronic Technology Co., Ltd.
● Auto Circling Mode On activation, the plane will maintain altitude and flight speed,
while initiating a counterclockwise circle, but this is not hovering around a fixed point, is
likely to be blown away from the original place of circle.
2.2 FY-41AP with GPS function
● Fixed altitude & Heading lock Mode This mode maintains aircraft flight course
& holds the altitude on activation. By using GPS data, the system automatically corrects
flight course deviation & maintains straight-line flight.
● Waypoint Navigation Flight Mode Enable you to fly fully autonomous, with up to
20 waypoint settings via the FY Ground Control Station (GCS) software.
● Auto Return To Launch Mode (RTL) Upon activation of this Mode, the aircraft
will automatically return to the Home point, maintaining is current altitude. Upon reaching
the Home point, it will initiate auto circling.
After the aircraft back to the target point ,if the altitude greater than 100 meters , the
aircraft will down to 100 meters while circling. For the FY-41AP, there is 50 meters
protection altitude for return home .If the altitude below 50 meters when activate into RTL,
the aircraft will climb to 50 meters while return.
Function of reduce the altitude automatically after return home ,and the minimum
protection altitude function just applicable to the firmware V1.20 orabove version.
● Auto Circling Mode On activation, the plane will maintain altitude and flight speed,
while initiating a counterclockwise circle. The centre of the circle is the point of activation
at a default radius of 80 meters (can be changed via FY GCS).
● GCS software By using a field computer and connecting the FY41AP to an FY
Data Radio via the UART port, you can set the FY41AP flight parameters, monitor the
flight progress & record / reply the flight via the FYGCS software. For more information,
please refer to the FY Data Radio manual.
NOTE:
1 ) After upgrading to firmware V1.20 or above version, the remote control lever
(AIL ,ELE,THR,RUD) no longer can control the aircraft in the navigation mode except
Fixed altitude & Heading lock Mode.
2 ) After upgrading to firmware V1.20 or above version, Operation the throttle lever is
invalid in Fixed altitude & Heading lock Mode, in this mode operation AIL,ELE,RUD
lever are effective.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 4
Guilin Feiyu Electronic Technology Co., Ltd.
NO
.
Module
Introduction
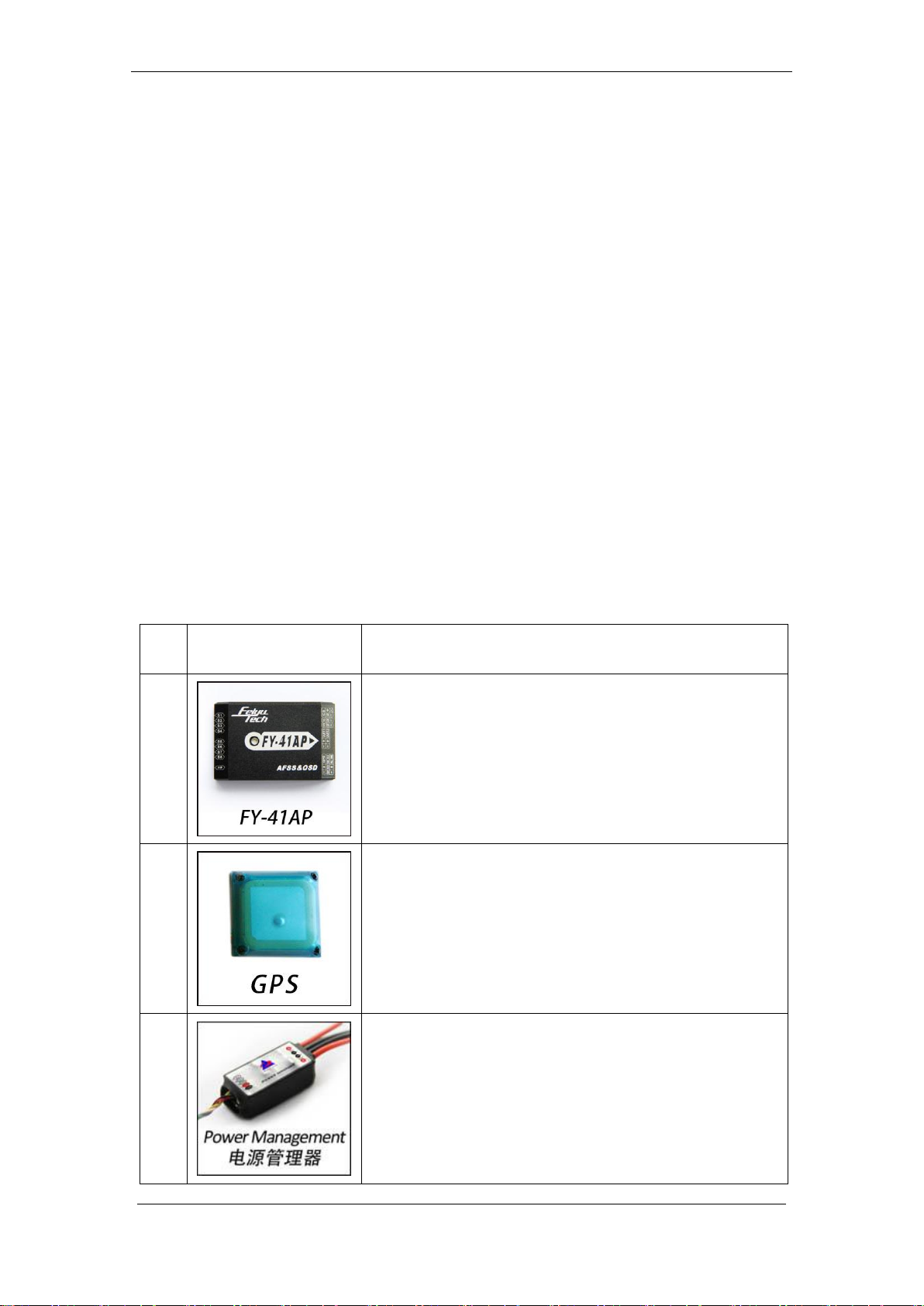
1
FY-41AP module
Size: 58mm*37mm*19mm
Weight: 34g
2
GPS receiver module
Size: 32mm * 32mm * 13.5mm
Weight:24g
3
Integrated with Current Sensor and regulate voltage
module to provide stable +12V to FY-41AP and FPV
video camera and transmitter at the same time.
Size: 50mm*24mm*18mm
Weight: 35g
2.3 OSD Video Overlay System Function
First Person View (FPV) FY-41AP has an integrated OSD video overlay system
that presents critical flight information on the video for easy enjoy FPV, at the same time,
Auto stable, Fixed altitude & Heading lock, Waypoint Navigation , Auto Return To Home
function will make FPV operation more easy.
2.4 FY-41AP can be connected to a data link
Connecting to a Data Link can increase flight distance. Additionally, when used with
FY-GCS (Ground Control Station) System you can view telemetry data of flight conditions
and more effectively, you are able to make changes real-time including setting of flight
path and other parameters including flight attitude etc.
3. FY-41AP Configuration
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 5
Guilin Feiyu Electronic Technology Co., Ltd.
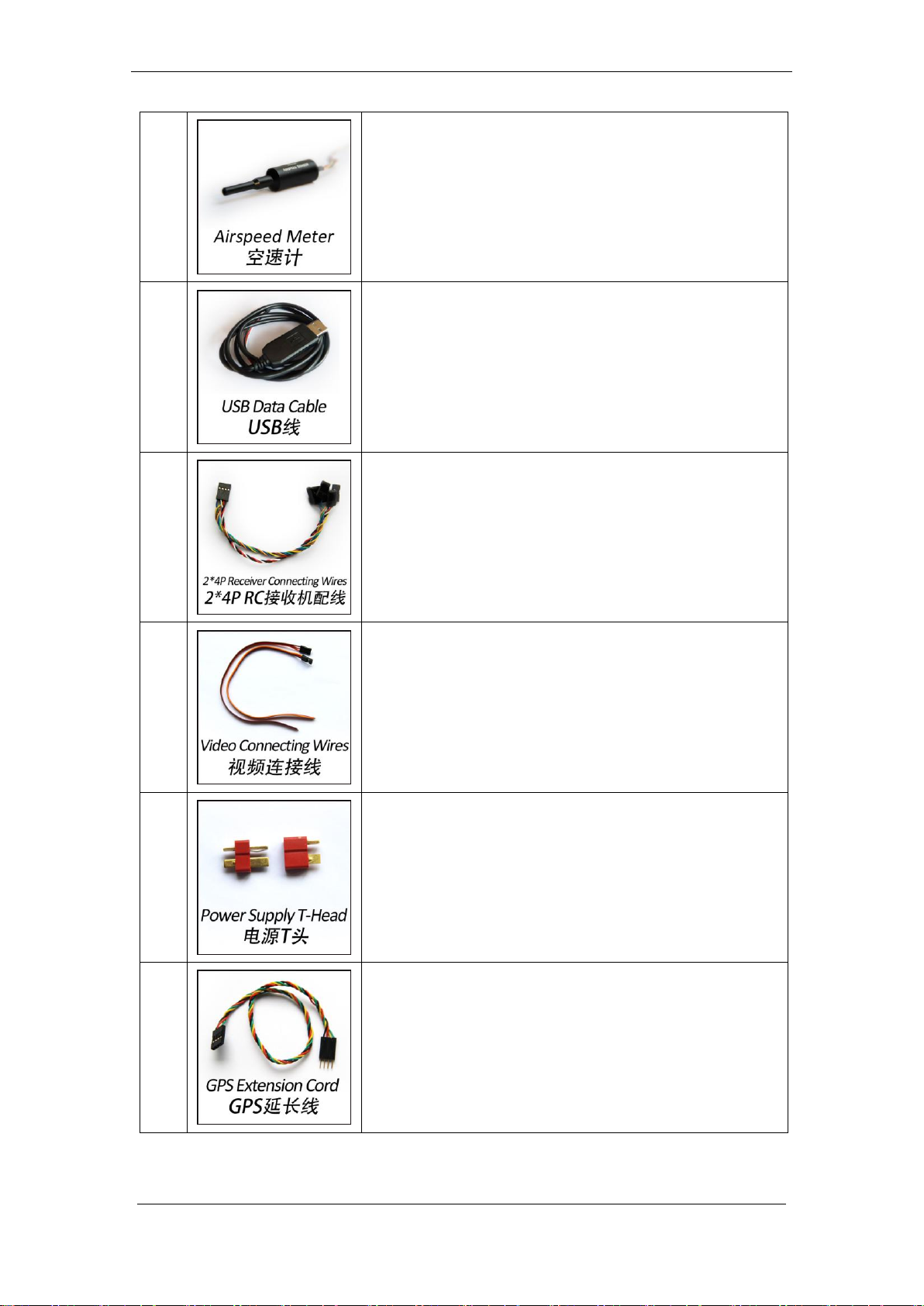
4
To measure airspeed
Size: 64.5mm * 13.5mm * 13.5mm
Weight: 9g
5
For FY-41AP upgrade version
For connect data link to PC
For connect remote adapter to PC
6
For connect FY-41AP to remote receiver
7
For connect video camera or video transmitter
8
Can weld to power manager module for connect the
batter and ESC
9
GPS extension wire
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 6
Guilin Feiyu Electronic Technology Co., Ltd.
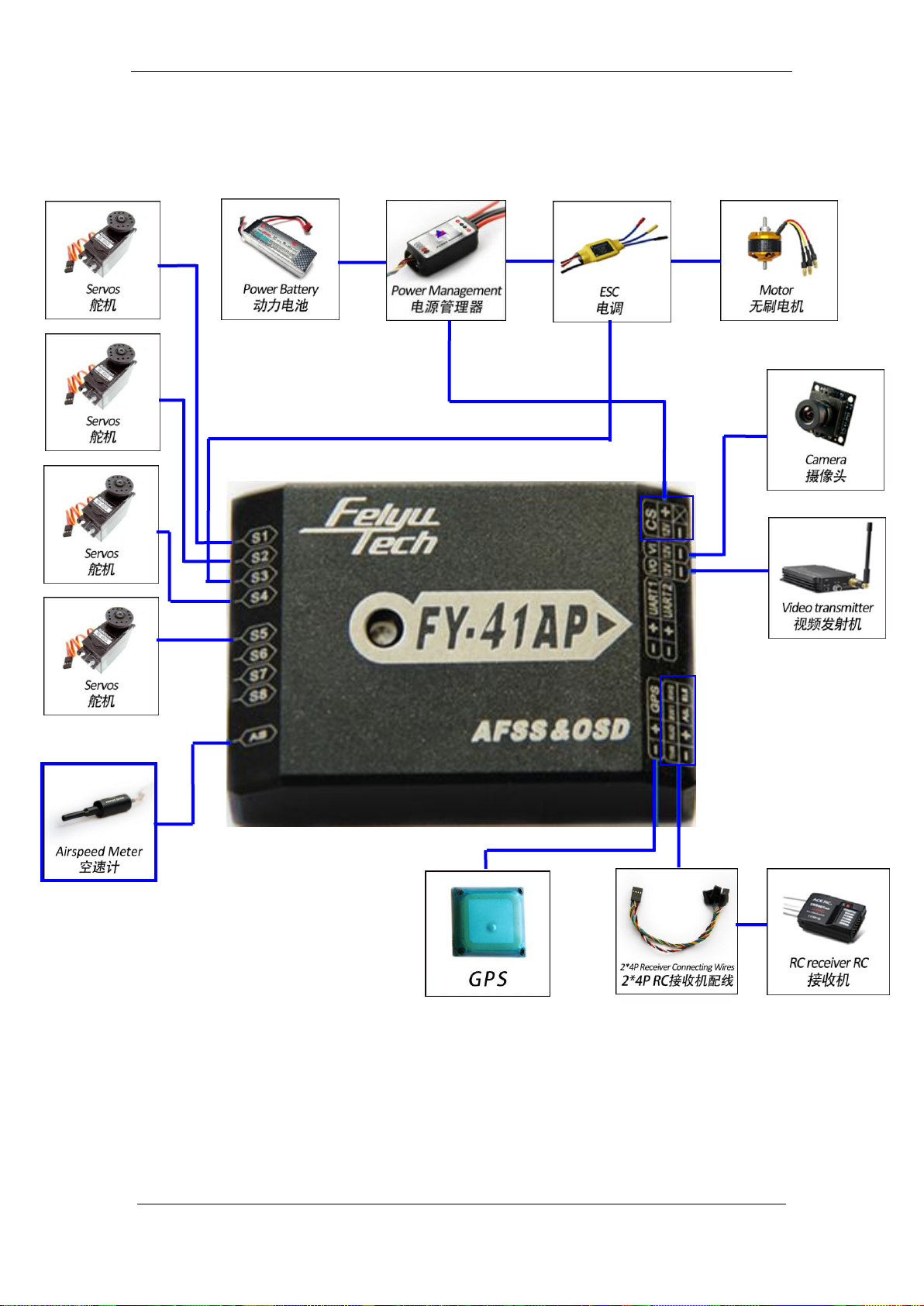
4. FY-41AP Connection Summary
Z
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 7
Guilin Feiyu Electronic Technology Co., Ltd.
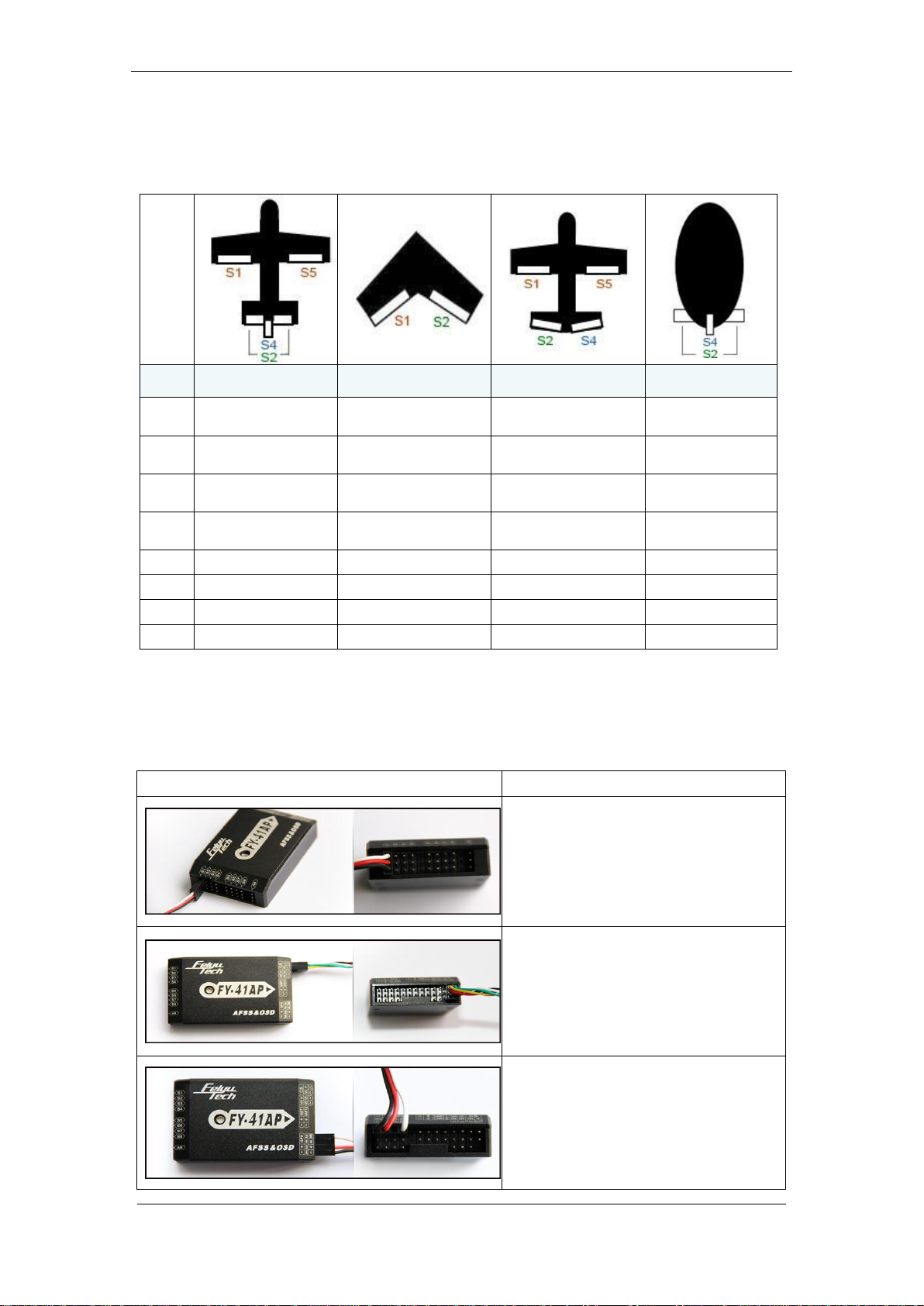
No.
Type
Traditional
Flying wing
V tail
Airship
S
Aileron servo 1
Aileron &Elevator
mix control servo 1
Aileron servo 1
Not use
S2
Elevator servo
Aileron &Elevator
mix control servo 2
Elevator &Rudder
mix control servo 1
Elevator servo
S3
Throttle
servo/ESC
Throttle servo/ESC
Throttle servo/ESC
Throttle
servo/ESC
S4
Rudder servo
Not use
Elevator &Rudder
mix control servo 1
Rudder Servo
S5
Aileron servo 2
Not use
Aileron servo 2
Not use
S6
Not use
Not use
Not use
Not use
S7
Not use
Not use
Not use
Not use
S8
Not use
Not use
Not use
Not use
Connection Picture
Introduction
S1~S8 servo wiring connection
Pay attention to the signal wiring
sequence
Power manager wiring
GPS module wiring
5. S1~S8 Servo Interface Connection
Instructions
NOTE: When using remote adapter, S7 and S8 output the channel 7 and channel 8
signal of the RC receiver directly.
6. Connection Introduction
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 8

Guilin Feiyu Electronic Technology Co., Ltd.
2×4P RC receiver wiring
For FY-41AP
Black Red White —— AIL
Orange —— ELE Green —— THR
Yellow —— RUD Brown —— CH5
Blue —— CH6
Airspeed meter wiring
Video camera wiring
Yellow-video signal
Red--+12V
Black--GND
Video transmitter wiring
Yellow-video signal
Red--+12V
Black--GND
Connect the USB data cable to
UART1 port to firmware upgrade for
FY-41AP control module
Connect the USB data cable to
UART2 port to firmware upgrade for
OSD module
Data link wire
Connect the FY-602 data radio to
UART1 port
Vibration absorbing pads
(dampers),use for FY-41AP
vibration damping installation.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 9
Guilin Feiyu Electronic Technology Co., Ltd.
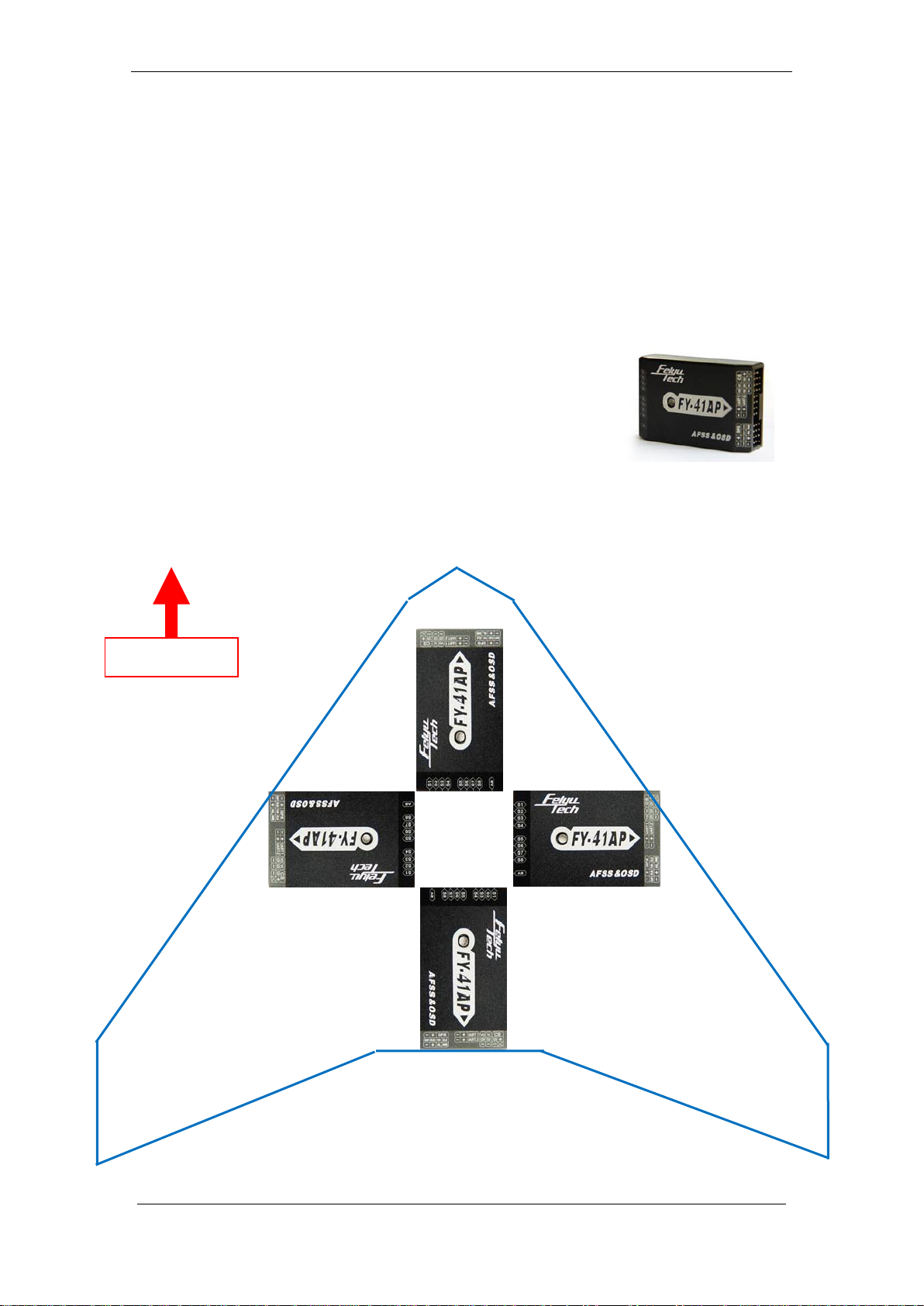
Arrow forward(Default direction)
Arrow towards to left
Arrow towards to right
Arrow towards to back
Nose of the plane
7. Main Module Installation
7.1 FY-41AP module installation
When installing, please keep FY-41AP horizontal and as close as possible to the
"Centre of gravity" (COG) of the aircraft. The modules orientation can be changed by
FY-GCS (Ground Control Station) system: arrow to front, back, left or right.
Efficient anti-vibration components are very important and to
be used when installing. You can use the included ‗vibration
absorbing dampers‘ or your DIY equipment. Please note: For
Nitro planes, flying without using efficient ‗anti vibration damper‘s‘,
will lead to FY-41AP working abnormally.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 10

Guilin Feiyu Electronic Technology Co., Ltd.
Static Pressure Port
Dynamic Pressure Port
7.2 GPS module install
GPS receiver module has integrated plate type GPS
passive antenna with stronger reception ability shielding the
false signal by ground reflection efficiently. DO NOT install
next to metal or carbon fiber & other shielding material, which
may block satellite signal reception. Install the GPS Module
horizontal and away from electromagnetic sources such as
ESC‘s, power wires, servo wires & video transmitters which can interfere with GPS signal.
7.3 Power manager module install
Power manager module supports 2S~6S lithium battery
input. The integrated current sensor can measure APM draw and
voltage; DC-DC module offers 5V to FY-41AP meanwhile 12V to
video camera and video transmitter. But servo power is supplied
by ESC or S1~S8 any port access.
7.4 Power manager module install
The airspeed sensor need to pull ahead the front of the pneumatic opening and in the
line with the direction of flight, cannot tilt . You can install the Airspeed sensor to the wing
or in the front of the nose, do not block the front of the air inlet , we can use the glue to fix
the airspeed sensor.But can't completely obturate the end of the airspeed sensor ,to
maintain pressure connected with the outside world. Note: Make sure that after installation,
the fuselage in flight airflow can not interfere with air intakes.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 11

Guilin Feiyu Electronic Technology Co., Ltd.
SW1
SW2
Deactivated
RTL
Stable
NULL
3D
ADH
7.5 Remote control setting: SW1&SW2
FY-41AP needs remote control and receiver with at least 6 channels, including 4
normal channels for AIL,ELE,THR,RUD, and two for SW1,SW2 to control flying mode.
You need to choose normal fixed wing plane mode canceling all mix control modes,
meanwhile setting CH5,CH6 to two three-switch.
FY-41AP need two three-switch to control flying mode:SW1 for deactivated mode,
stable mode, 3D mode; SW2 for return to home and fixed
attitude and head locking mode (default mode),circle, and
path flight mode(need set).
After setting the Switch, you can double check by
monitoring the indicator light on the module against
selected flying mode. Detail see the indicator light manual.
SW1&SW2 default set:
NOTE: SW-2 has priority over SW-1. Only when SW-2 is in the ‗Null‘ Mode can SW-1
work. Therefore ‗Null‘ should be one of the options for SW-2, otherwise SW-1 will not
work.
7.6 Gyroscope Reset
If the following conditions occur, the FY-41AP initialization is recommended:
1. The device has not been used for a long time.
2. There is a change in environmental temperature of over 30 degrees since last
flight.
3. The purple LED flashes continuously even when the FY-41AP remains
stationary and you never activate the motor.(When you in non navigation mode,
which means SW2 is ―NULL‖.
Note: For the better flight, we suggest you to do the gyro reset before each flight.
There are three way to realize the gyro reset. (The FY-41AP must keep stationary
during the gyro reset procedure)
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 12

Guilin Feiyu Electronic Technology Co., Ltd.
(1) Through SW1:
On SW1,switch ABM to Deactivated Mode 6 times, time interval has to be less than 3
seconds as follows:
ABM→ Deactivated Mode → ABM → Deactivated Mode → ABM → Deactivated
Mode → ABM → Deactivated Mode → ABM → Deactivated Mode → ABM → Deactivated
Mode.
After doing this operation, the LED will bright white light about 1S.Wait for the
LED go out, then the gyro initialization finish.
(2) Through OSD video overlay menu ―INIT GYRO‖ option.
(3) Through the ― FYGCS 5.11 for FY41AP and Dos ‖setting software ―Initialize the
gyro‖ button which in the ―Autopilot Configuration Wizard‖ option.
Note: Making gyro initialization via the OSD menu and the ―FYGCS 5.11 for FY41AP
and Dos ‖ setting software, won't appear the phenomenon of the LED bright white light.
7.7 FY-41AP indicator light instruction
FY-41AP with three colors LED which can send out red, blue, green light. Also yellow,
white, purple and other colors light through the combination.
Operators can know the FY-41AP‘s operating mode by judging the different colors
which the LED sends out and the flash frequency. green light flash means GPS location
fixed, red and blue light indicate FY-41AP working mode.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 13

Guilin Feiyu Electronic Technology Co., Ltd.
No.
Instruction
No.
Instruction
1
GPS altitude(Unit: m)
10
Relative altitude (Unit: m)
2
The quantity of satellite used for
positioning
11
GPS speed (Unit: km/h)
3
Airspeed/GPS speed (Unit: km/h)
12
Flight total mileage (Unit: km)
4
The battery voltage (Unit: V)
13
Total flight time (Format:h:m:s)
5
Battery power consumed (Unit:
mA/h)
14
Current course of flight (Unit: deg)
6
Distance to Home Point (Unit: m)
15
The angle of turning to the Home Point
(Unit: deg)
7
Power battery current (Unit: A)
16
Attitude table
8
Flight mode
17
Relative position of Home Point (Icon
in the middle position when the
aircraft is around Home Point.)
9
Current latitude & longitude of the
plane (Format: dddmm.mmm)
Note: When the FY-41AP needs Gyro Reset or FY-41AP module is in a state of
motion, the LED will bright purple light.
e.g. Red Manual Mode, GPS not lock
Red—Red—Green Stabilized Mode, GPS lock
Purple—Purple—Green Stabilized Mode, GPS lock,
If it stay static means need Gyro Reset.
Blue—Blue—Blue—Green Waypoint Navigation Mode, GPS lock
7.8. OSD interface instruction
The integrated OSD module supports PAL or NTSC form video input.
OSD display interface:
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 14

Guilin Feiyu Electronic Technology Co., Ltd.
Name
Introduction
Name
Introduction
RC
Deactivated mode
ADH
Fixed altitude &
Heading lock Mode
3D
3DAerobatic Flight
ACM
Circle mode
ABM
Stable mode
NAV
Path mode
RTL
Return to home
Flight mode instruction
8. FY-41AP Setting
There are two ways to set the FY-41AP, one is via remote control and OSD overlay
menu settings. Another solution is connected via USB cable to the computer by using the
setting software to set up. Here we introduce the use of these two methods.
Method one: Setting FY-41AP via remote control and OSD overlay menu
1 ) Activate the OSD setup menu: switch "ABM" to the "3D mode" 6 times in SW1,
between two switching it has to be less than 3 seconds, the process is as follows: ABM
→ 3D mode →ABM →3D mode → ABM → 3D mode → ABM → 3D mode →ABM → 3D
mode →ABM→ 3D mode. This will activate OSD setup menu interface.
2 ) Move Elevator stick to the project you want to set.
3 ) Move aileron stick to the project you want to set.
4 ) Please put elevator stick to SAVE, after your setting.Through the stick of ailerons
carried out to save the action, when saving, "SAVE" will flicker for two seconds, the end
of the flashing, been saved successfully.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 15

Guilin Feiyu Electronic Technology Co., Ltd.
NO.
Setup instructions
NO.
Setup instructions
1
Auto-control rudder surface reverse
10
circling radius setting
2
Control gain
11
Farthest flight distance setting
3
ailerons
12
Airspeed adjust setting
4
Elevator
13
Rudder mixing mode
5
Rudder
14
Initialize gyroscope
6
Throttle
15
Initialize air speed sensor
7
Three-switch mode selection
16
Save the settings
8
FY-41AP install setting
17
Exit the Settings interface
9
Cruising speed setting
Method two: Setting FY-41AP via “FYGCS 5.11 for FY41AP and Dos”
software
1 ) Please visit the official website : www.feiyu-tech.com. Download the newest setting
software ―FYGCS 5.11 for FY41AP and Dos‖ and the USB driver at the download page
which related to FY–41AP products.
2 ) Insert the USB data cable into your computer(don't connect any other things into
USB data cable ) , you will find there is more than one port(COM and LPT), the
port―COM1‖in the ―Prolific USB-to-Serial Com Port (COM1)‖ exactly is the Virtual serial
number.
3 ) Install Google Earth plug-in 6.1 version or above.
Two methods to install the plug-in .
Method one: Networking installed directly.
Method two: Install the local plug-in provided by us , you can download at our
official website: www.feiyu-tech.com.
Method for checking whether the Google Earth plug-in have been installed
successfully. Enter the following url :
http://www.google.com/earth/explore/products/plugin.html , If the plug-in have been
installed successfully, you can see the following 3D map directly.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 16

Guilin Feiyu Electronic Technology Co., Ltd.
4 ) Install the software ―FYGCS 5.11 for 41AP and Dos‖,the software in addition to can
use for setting up and configuring FY-41AP also included other functions. For example,
Electronic mapping, Telemetry data monitoring of flight parameters , flight attitude , flight
speed , altimeter , location, Recording and playback of telemetry data into Ground
Station Computer , Route editing , Map loading ,etc .
The FYGCS5.11 software include Google earth live map, also can support 2D view
and 3D view at the same time. Support in offline mode display the map which have been
browse.
a) Double-click ― ‖ installed by default.
b) After installation, double-click ― ‖ ,open the FYGCS5.11 software ,you
can see the following interface.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 17

Guilin Feiyu Electronic Technology Co., Ltd.
c) Confirmation has been connected to the network , click the ―3D‖button ,you can
switch to the Google earth map.
Note: If you can’t open FYGCS5.11 successfully in Vista or Win7 operating system .
Please find out executable file, right click the mouse and run as administrator.
Please according to the picture below, through USB data cable to connect FY-41AP
to PC.
Connect FY-41AP to your PC, from ―my computer‖ –―device manager‖ –―Port‖ to find
COM port , select corresponding COM port. Baud rate has to be―19200‖, click ―connect‖
button. After FY-41AP establish connection with the GCS software successfully .Select
the ―Menu-> Autopilot Configuration Wizard‖ ,you can finish the setting in the configuration
Wizard .The last ,you can click the button ― ‖ to save the setting into the
FY-41AP controller.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 18
Guilin Feiyu Electronic Technology Co., Ltd.
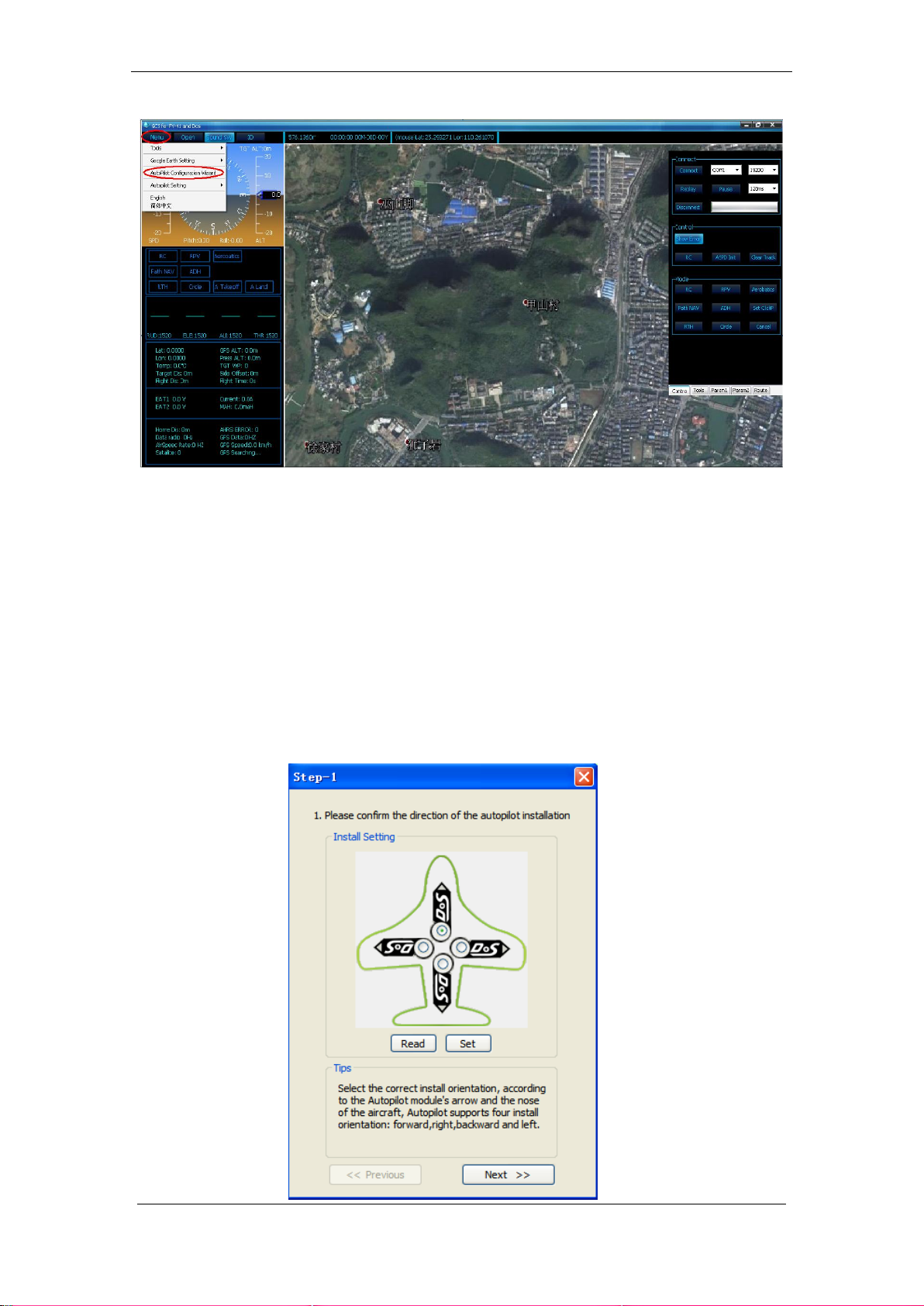
Step one: Installation direction setting
First you should set the correct mounting direction according to the FY-41AP
mounting direction on the plane(The default setting is Arrow forward).After choose the
correct mounting direction, pitch and roll inclined the plane through the attitude Chart to
check whether the posture and aircraft state is identical.
Method one: Setting FY-41AP via remote control and OSD overlay menu
Setting via the "Install Setting" option in the OSD menu.
Method two: Setting FY-41AP via “FYGCS 5.11 for FY41AP and Dos”
software
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 19

Guilin Feiyu Electronic Technology Co., Ltd.
No.
Normal
Elevon
V tail
Airship
Option
No MIX
ELE&AIL MIX
ELE&RUD MIX
No MIX
Aircraft Config
Mix Setting Selection
Remark
Traditional
aircraft layout
with Aileron
1.Normal
Navigation control using aileron.
4.Normal(RUD NAV)
Navigation control using rudder.
Flying wing
aircraft
2.Elevons
Navigation control using aileron. Used
for most kinds of flying wing planes.
5.Elevons(RUD NAV)
Used for flying wings with independent
rudder for Navigation.
V-Tail aircraft
with Aileron
3.V-Tail
V-Tail with navigation via aileron.
6.V-Tail(RUD NAV)
V-tail planes with independent Rudder
for navigation control.
Traditional
aircraft layout
with no Aileron
1. Normal
The rudder servo must be connected to
FY-41AP aileron servo output (AIL)
V-tail without
aileron
2. Elevons
V-tail servo has to connect to FY41AP
Differential Servo 1 & 2 output.
Airship
4.Normal (RUD NAV)
Due different airship configurations,
use with caution. Carry out test flights
to confirm normal function.
Step two: Servo’s output mix control mode setting
“AIL NAV‖means using only aileron make a turn in navigation mode.
‖RUD NAV‖means using only rudder make a turn in navigation mode.
Method one: Setting FY-41AP via remote control and OSD overlay menu
Based on the aircraft models to select the correct rudder output. Setting via the ―MIX
SETTING” option in the OSD menu.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 20

Guilin Feiyu Electronic Technology Co., Ltd.
Method two: Setting FY-41AP via “FYGCS 5.11 for FY41AP and Dos”
software
Step three: The remote control switch setting & checking
and setting the direction of the rudder surface automatically
control .
FY-41AP requires a minimum of 6-channel RC receiver.
1) First, the remote control is set to fixed-wing aircraft of conventional layout mode,
do not set any mixing. The rudder angle of the remote control is set to 100%, and
fine-tune gyrus.
2) Need two three-stage switch or rotary switch settings for CH5, CH6 used to
connect SW1 and SW2. Used to switch the flight mode.
3) Connection is completed, the call CH5, CH6 check the settings are correct
control mode, the status of the lights, or OSD display mode to confirm.
4) To switch to manual mode, check the control surfaces of the joystick remote
control aircraft direction is correct, if not correctly adjusted positive on the remote
control rudder control to correct the reverse.
5) Switch to the "Auto Balance Mode" mode, check the control direction according
to the following steps carefully.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 21

Guilin Feiyu Electronic Technology Co., Ltd.
Method one: Setting FY-41AP via remote control and OSD overlay menu
In the OSD menu, you can change the direction of the rudder control via the ―REV‖
list of the ―Servo Gain REV‖ option.
Method two: Setting FY-41AP via “FYGCS 5.11 for FY41AP and Dos”
software
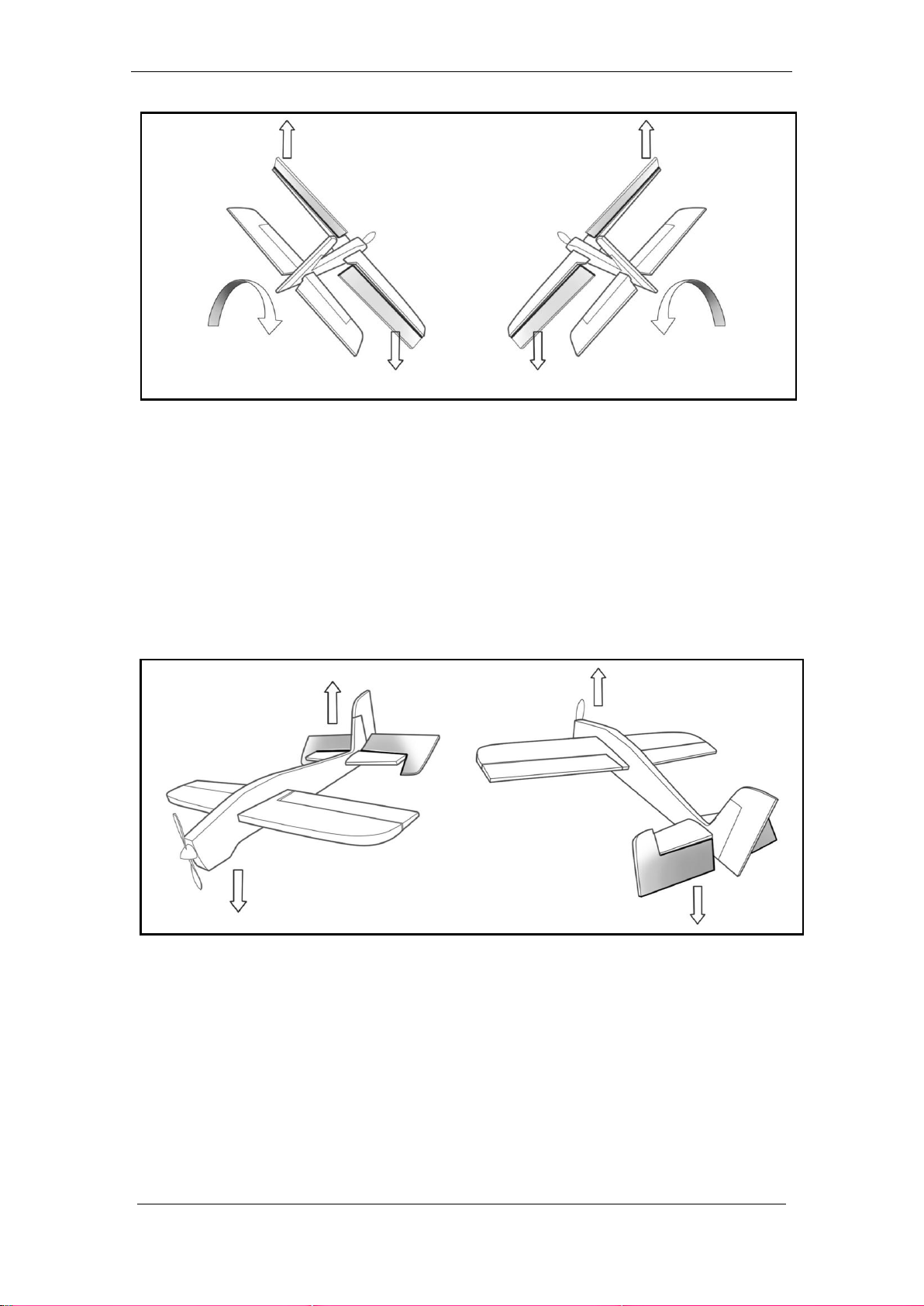
( 1 ) AILERON (Check in "Auto Balance Mode" )
RIGHT Roll the plane , the right aileron should automatically move downwards, while
the left aileron move up.
LEFT Roll the plane , the left aileron should automatically move downwards, while the
right aileron should move up.
If the servo movement is incorrect, you need to reverse the automated servo
movement please select ―AIL REV‖.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 22
Guilin Feiyu Electronic Technology Co., Ltd.
Upward
Roll right
Downward
Upward
Downwar
Roll left
Downward
Upward
Nose Up
Nose Down
( 2 ) ELEVATOR (Check in "Auto Balance Mode" )
UPWARD Incline the plane nose ,the elevator should automatically move
downwards.
DOWNWARD incline the nose ,levator should automatically move upwards.
If the servo movement is incorrect, you need to reverse the automated servo
movement please select “ELE REV”.
( 3 ) Rudder (Check in "Auto Balance Mode" )
CLOCKWISE rotate your plane , the rudder should move to the Left.
COUNTER CLOCKWISE rotation ,the rudder should move to the Right
If the servo movement is incorrect, you need to reverse the automated servo
movement please select “RUD REV”.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 23

Turn left
Rudder moves to the right
Turn right
Rudder moves to the left
( 4 ) Throttle
Guilin Feiyu Electronic Technology Co., Ltd.
Push throttle from light to strong, if the servo display chart of the remote control is
display (-100 to 100) please don‘t select the‖ throttle reverse‖ option in the rudder reverse,
if from big to small (100 to -100) please select the‖ throttle reverse‖ option in the rudder
reverse.
The general ESC throttle control (ESC) use the default settings (NOR), without ESC
reverse set.
Step four: Basic sensitivity Settings for automatic control
We suggest that the first flight should be in default value ,then adjust the value
according to the actual flight .
Adjustment principle: check the gain of stability whether it is normal in the "Auto
Balance Mode ―.
Control aircraft in roll, then loosen the rocker, observe that if the plane can be
automatic recovery level, control aircraft in pitch, then loosen the rocker, observe that if
the plane can be automatic recovery level.If the automatic recovery control can not strong
enough ,you can tone the gain of stability .If the pitch and roll swings back and forth ,it
means the parameters is too big ,it need decrease to a small amount .
The greater gain of RUD the weaker effect of the servo when in making a turn .
Gain of the throttle generally do not need to adjust, if the airspeed have a small
space velocity shock in automatic navigation ,you can decrease the parameter to suitable.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 24

Guilin Feiyu Electronic Technology Co., Ltd.
Method one: Setting FY-41AP via remote control and OSD overlay menu
In the OSD menu ,you can change the gain of the rudder control via the ―Gain‖ list of
the ―Servo Gain REV‖ option.
1) Every channel's gain can be set separately (AIL,ELE,THR,RUD), setting
range:0-99.
2) Min:0, equivalent shut down auto balance function. Max:99.
3) Gain is the sensitivity of automatic control, Will affect the navigation control and
automatic balancing effect directly. If setting too small the automatic balance effect is not
good, and if setting too much will cause the plane shaking .
4) General condition,we just suggest you use the default parameters(50).Please do
not set control gain to a very large number at your first flight .The best way is adjusting
according to more test flight. Under the condition of allowing, we suggest that the
parameter should be adjust to bigger value as far as possible, so that conducive to
balancing of the plane.
Method two: Setting FY-41AP via “FYGCS 5.11 for FY41AP and Dos”
software
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 25
Guilin Feiyu Electronic Technology Co., Ltd.
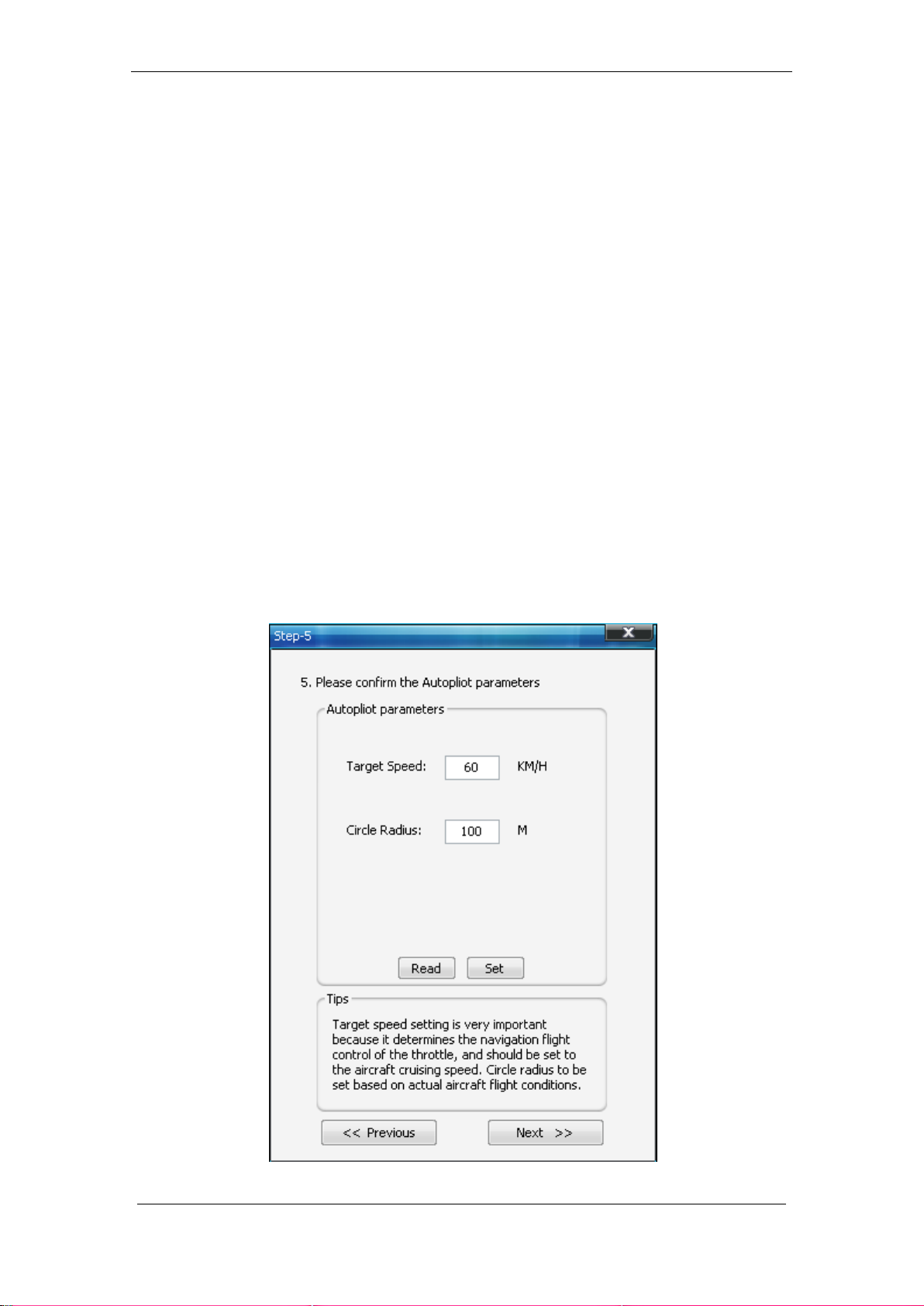
Step five :The cruise speed and hovering flight radius setting
Target speed setting (Default setting is 60km/h) The flight speed is very
important, you can not optional Settings. The speed must can keep aircraft keep normal
flight. We suggest not increase the settings too high, it may cause very unusual flying
behavior and may result in damage of your aircraft due to excessive throttling.
You can observe the "GPS velocity" on GCS software when in flight, and to
evaluate the aircraft's cruising speed.
Circle radius It means the radius of the hovering flight .Speed of the plane which
achieve 60 km/H , the circle radius should be set to more than 80 meters .We suggest that
the circle radius should be set more than 1.6 times of the flight speed.Such as the speed
of the plane in 100 km/H ,the circle radius suggest that set in 160 meters .If the circle
radius is set too small , hovering flight may not be able to normal ,the plane will decrease
flight altitude, even cause the dangerous of air crash.
Method one: Setting FY-41AP via remote control and OSD overlay menu
You can set the‖ Target speed‖ and the ―Circle radius‖ via the ―Flight‖ option in the
OSD menu (Speed: Target speed , CIR RAD: Circle radiu).
Method two: Setting FY-41AP via “FYGCS 5.11 for FY41AP and Dos”
software
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 26

Guilin Feiyu Electronic Technology Co., Ltd.
Step six: Gyro and airspeed sensor Initialization
Gyro Initialization : When doing the gyro reset, please keep the aircraft static . It‘s
better to do the gyro reset before each flight.
Airspeed sensor initialization: The aircraft keep static, you can use your hand to
cover the port of the airspeed sensor, and do not let the wind interfere with the airspeed
sensor, then execute the initialization operation .After that please check whether the
airspeed showing on GCS is in the vicinity of 0-3.Due to the sensor error, there are some
tiny airspeed value on the ground is normal.
Method one: Setting FY-41AP via remote control and OSD overlay menu
The ―COMFIG‖ option in the OSD menu (INIT GYRO).
Method two: Setting FY-41AP via “FYGCS 5.11 for FY41AP and Dos”
software
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 27

Guilin Feiyu Electronic Technology Co., Ltd.
9. FY-41AP first flight test checklist
Adjustment of the aircraft
Fine-tuning adjustment after take-off in balanced mode, leveling the aircraft the
throttle placed into cruise throttle position. If the manual mode level flight trimming,
and the level of the balanced mode fly to fine-tune a lot of difference, it is recommended
that the new record level flight attitude. If the manual mode leveling switch to balance
mode, the aircraft bow, you need to elevate the head record level flight attitude, and vice
versa pad low head re-recorded.
Take off
Take off in manual mode. If you are confident, after completing the basic check, you
can take off in ABM, This is more suitable for the remote control skills are not enough
skilled operator.
Other settings can temporarily use the default settings, the following can be
flown for the first time. After each set and do not forget the "Save parameters"
Step seven: Record Attitude
The default attitude angle is ―0‖ (zero). After finish the installation, the aircraft place
to the level flight attitude, then record the attitude. This function is used to eliminate any
installation deviation from the default.
When record the level flight attitude on the ground via toggle switch , it will initialize
the gyro at the same time, so ensure the aircraft absolute static. Please according to
following steps to complete the recording.
1 ) The aircraft put on the ground in level flight attitude ,keep static.
2 ) Under the RC mode ,the remote control rocker position in the middle ,the throttle
rocker position to the lowest ,adjust rudder surface to leveling.
3 ) Switch to the ABM mode ,then switch from ABM mode to the RC mode 8 times,
the LED light from white to green, and then the aileron rudder surface will execute an
operation that a tilt and then back to the flat to prompt the success of the recording.
4 ) ―ABM→RC→ABM→RC→ABM→RC→ABM→RC→ABM→RC→ABM→RC→AB
M→RC→ABM→RC‖.
This operation will finish the recording and save permanent automatically.
Note: The first flight or after upgrading firmware ,you need to record level flight
attitude.But don’t need to record before every flight.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 28

Guilin Feiyu Electronic Technology Co., Ltd.
Return to launch test
Switch SW2 to Return To Launch (RTL)mode to watch the aircraft automated return
to home or not. Upon reaching the home point it will automatically engage auto circling,
while it waits for your further instructions.
Cruising speed setting
You can adjust this cruising speed as per your model‘s requirement. Fly the plane in
at speeds most comfortable for cruising and Set that value via the Setting Software.
Landing
Now that we have completed the basic test, landing or other features of the test.
Auto balance mode test
a) This paragraph explains the interactions between pilot input, Auto Balance Mode
(ABM) and autonomous flight (Navigation Mode).
b) In ABM, the FY41AP will constantly want to keep the aircraft flying level and
straight. Any pilot input will go against this stabilizing action, in order for you to
change the course, altitude or angle as you fly the plane.
c) The higher the Gain setting AIL, ELE & RUD, the more you will feel the aircraft fly
‗less flexible‘. This is normal. The higher the Gain, the stronger will be the
leveling action of the FY41AP. And the smaller the RC input you have on the
aircraft.
To counter this, reduce the Gain until you feel the plane‘s flying attitude is
comfortable for your flying style.
d) Alternately, if the Gain setting is too low, the aircraft self leveling will be weak and
the greater the pilot manual control will be.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 29

Guilin Feiyu Electronic Technology Co., Ltd.
SW2 Mode
Function
Remark
Null
SW-2 Deactivated
SW-2 set to NULL, Flying mode is controlled by
SW-1.
Go Home
Auto Return To Launch
On activation, plane will automatically return to
launch (RTL) point.
Line
Fixed altitude & Heading lock
flight Mode
With no controlling input from the pilot, the
plane will automatically lock current heading &
maintain altitude.
Circle
Auto Circling Mode (ACM)
Automatically fly, circling a fixed point. Centre is
at point of ACM activation.
10. Other functions and settings
10.1 Switch ( SW2 ) function setting
You can select the navigation mode which control by SW2.The navigation of FY-41AP
show in the table,we can just select two modes for SW2 at the same time .
If you upgrade the firmware to V1.16 or above version ,you need to set the SW2
functions by using ―FYGCS5.11 for FY41AP and Dos‖ software.After FY-41AP connect to
the GCS software successfully , you can select ―Menu->Autopilot Setting->RC Setting‖ to
finish the switch mode setting.
10.2 RC Max Distance Setting
The RC Max Distance Setting will not allow the plane to fly beyond the distance you
have set. Upon reaching this distance, the FY41AP will automatically engage RTL and fly
back to you.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 30

Guilin Feiyu Electronic Technology Co., Ltd.
The default RC Max Distance Setting programmed into the FY41AP is 4000 meters.
If you upgrade to the firmware V1.16 or above version,you need to adjust this
parameter via “FYGCS5.11 for FY41AP and Dos” software. After FY-41AP connect to
the GCS software successfully ,you can select “Menu->Autopilot Setting->RC
Setting” to finish the RC Max Distance Setting.
10.3 Circling Radius Setting
The FY41AP can fly over a set GPS point upon activation of Auto Circling Mode via
switch SW-2.
The default circling radius is 80 meters. You may adjust this circling radius using this
Setting Software function. Press ‗Set‘ to confirm and save your updated circling radius.
10.4 The altitude of Return To Launch instructions
When activated in this mode, if the current altitude is greater than 50meters, the
FY-41AP will automatically fly the plane back to the home point.Then after the aircraft
back to the target point, if the altitude greater than 100 meters , the plane will down to
100 meters while circling .For the FY-41AP,there is 50 meters protection altitude for return
home .If the current altitude below 50 meters when activate into RTL, the aircraft will climb
to 50 meters to return.
10.5 FAIL-SAFE setting
The RC receiver remote control mode uncontrolled return of function, you need to
use with runaway protection function remote and the receiver.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 31

Guilin Feiyu Electronic Technology Co., Ltd.
Failsafe remote control receiver when no signal is received, output a default set
of rudder. Various models of remote control set runaway protection have said, the
reference to the remote control manual.
Return channel CH6 need to set connected to SW2 is out of control out of control
protection switch to the status of the return. Aileron, elevator, rudder channel is set to
loose rod status, throttle setting have two situation
(1) FY-41AP upgrade to the firmware V1.20 or above version. If connect the
airspeed sensor to the FY-41AP controller, the throttle don‘t need setting ,the controller will
output a proper controlled quantity according to the target speed .
(2) FY-41AP upgrade to the firmware V1.20 or above version , If you are not use the
airspeed sensor ,the throttle need to set to cruise throttle position.
If debugging balanced mode, the following Futaba remote control T10CHG example
set runaway protection. Settings, turn off the power to the aircraft, to avoid setting
the motor starts.
First enter the remote control setup menu to find the set of "F / S"; into the F / S menu,
the lever into the neutral position, rudder trimming to maintain the status adjusted, the
throttle lever to the cruise throttle position(apply to situation (2)), the CH6 cut to return
mode. Then in all open channel F/ S, and often set by the "PUSH" button, set successfully
as shown.
After setting the aircraft is powered off control check has successfully entered the
return mode. Pay attention to safety, to prevent the Failsafe motor rotation, met
items cause damage.
10.6 Fixed altitude & Heading lock Mode instruction
Fixed altitude & Heading lock Mode – This mode maintains aircraft flight course &
holds the altitude on activation. By using GPS data, the system automatically corrects
flight course deviation & maintains straight-line flight.
Attention: Please make sure the RC stick is released when you switch into
Fixed altitude & Heading lock Mode. The FY-41AP can record current RC stick
position and lock the flight course and altitude when your RC stick released.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 32

Guilin Feiyu Electronic Technology Co., Ltd.
10.7 3D Mode instruction
3D Mode –––– If no input is given by the pilot (all sticks in the middle position), 3D
mode will lock the current aircraft attitude. Therefore the aircraft can be easily
maneuvered to complete a variety of 3D flight with added stability & smoothness.
Attention: Please make sure the RC stick is released when you switch into 3D
Mode. The FY-41AP can record current RC stick position and lock the flight attitude
when your RC stick released.
10.8 Auto Circling Mode instruction
Auto Circling Mode –––– On activation, the plane will maintain altitude and flight
speed, while initiating a counterclockwise circle. The centre of the circle is the point of
activation at a default radius of 80 meters (can be changed via FY GCS).
10.9 Waypoint Navigation Flight Mode instruction
Waypoint Navigation Flight Mode –––– Enable you to fly fully autonomous, with up
to 20 waypoint settings via the FY Ground Control Station (GCS) software.
10.10 Link Mode (RC receiver control mode/Data radio
control mode)
FY-41AP there are two remote control mode, the default setting for the RC receiver
mode. Directly connected to an RC receiver RC mode, selected data transmission with a
remote control adapter plate and several transmission radio remote control radio remote
control mode (you need to buy another ground station upgrade package).
–––– END ––––
Note: We reserve the right to change this manual at any time! And the newest edition will
be shown on our website www.feiyu-tech.com.
Guilin Feiyu Electronic Technology Co., Ltd http://www.feiyu-tech.com service@feiyu-tech.com
Page 33
 Loading...
Loading...