

Page 1

Technical Manual
TNC 122
April 97
Page 2

This Technical Manual for the HEIDENHAIN TNC 122 straight cut control applies for the
NC software version 246 117 08 and is subject to change without notice.
Page 3

Foreword
The HEIDENHAIN TNC 122 is a compact, three-axis straight cut control for machine tools with
central drive. It has been developed as the successor model for the TNC 121, to which it is
compatible for installation. The TNC 122 has an expanded range of functions.
This Technical Manual is intended for all machine tool builders and machine tool distributors, and for
retrofitting companies who wish to replaced an installed TNC 121 with a TNC 122. It provides the
information required for mounting, electrical connection and commissioning the control.
For information on the new and improved operating features, please refer to the User's Manual.
Page 4
Contents
1 Specifications 4
2 Hardware 6
3 Software 6
4 EPROM Sockets 7
5 Power Supply 8
6 Grounding Diagram 9
7 Connections 10
8 Pin Layout 11
8.1 Data interface 15
9 Machine Integration 16
9.1 Encoders 16
9.2 Traverse ranges 17
9.3 Reference marks 18
9.4 Position feedback control of the NC axes 24
9.5 Monitoring functions 29
9.6 Display and operation 31
9.7 EMERGENCY STOP circuit 33
10 Exchanging the control 36
11 Machine Parameters 37
11.1 Entering and changing machine parameters 37
11.2 Machine parameter list 38
12 PLC Description 45
12.1 PLC-EPROM 45
12.2 PLC Commands 46
12.2.1 Load and store commands 46
12.2.2 Set commands 49
12.2.3 Logical connective operations 50
12.2.4 Arithmetic commands 52
12.2.5 Comparisons 54
12.2.6 Parenthetical expressions 55
12.2.7 Shift commands 56
12.2.8 Bit commands 57
12.2.9 Stack operations 57
12.2.10 Jump commands 59
12.3 Classes of markers and bytes 60
12.4 Marker list 61
13 Error Messages 65
14 Dimensions 66
15 Subject Index 69
4/97 TNC 122 Contents 3
Page 5
1 Specifications
Type of control
Program memory
Design
Tool memory
Modes of operation
Program input
Display step
Programmable function
Languages
Max. traverse
Max. traversing speed
Position encoders
PLC cycle time
Control inputs
Control outputs
Data interface
Straight cut control for 3 axes
and paraxial positioning
Memory for up to 500 NC blocks,
20 NC programs
Compact control for panel mounting
7-segment LED for actual position display
LED dot matrix 5 x 7 for preset display
One tool for length and radius compensation
Manual operation
Positioning with manual data input
Program run single block
Program run automatic
Programming and editing
Manually through TNC keyboard
Through RS-232-C/ V.24
1 µm or 5 µm (0.000 05 in., 0.000 2 in.)
Nominal position in absolute or incremental dimensions
Subprograms, program section repeats
Tool radius compensation R+/RBolt-hole circle, hole circle segment, linear hole pattern
Feed rate / rapid traverse
M functions
Dutch, English, French, German, Spanish
± 9999.999 mm
30 000 mm/min
Incremental HEIDENHAIN position encoders, optionally
with distance-coded reference marks
16 µA
Grating Periods: 4, 10, 20, 40, 100, 200 µm
24 ms
3 position encoder inputs (sinusoidal inputs)
15 PLC inputs +1 PLC input for a control-is-ready
acknowledgment
One analog output (for central drive)
15 PLC outputs + 1 PLC input for control-is-ready signal
RS-232-C/ V.24, up to 38 400 baud
/40 µAPP selectable
PP
4 TNC 122 1 Specifications 4/97
Page 6
Power supply
Power consumption
Ambient requirements
Weight
Primary-clocked power supply 100 V to 240 V
19 W
Operation : 0° to +45° C
Storage : –30° to +70° C
Relative humidity, mean annual: < 75%, for max. 30 days
per annum, naturally distributed: < 95%
Approx. 3 kg
4/97 TNC 122 1 Specifications 5
Page 7
2 Hardware
Id. Nr. 284 083 xx
3 Software
Software versions
The NC software 246 117 07, together with the PLC software 277 938 13 of the TNC 122 replaces
the following software versions of the TNC 121:
Software Version of TNC 121
205 438
205 443
205 444
205 446
205 455
205 456 unipolar standard
205 457 bipolar standard
205 430
6 TNC 122 2 Hardware 4/97
Page 8
4 EPROM Sockets
IC-P1 NC
IC-P2 PLC
The PLC EPROM is a 2 MB or 4 MB chip.
Danger of electrical shock!
Unplug the power cord before opening the housing.
Danger to internal components!
When handling components that can be damaged by electrostatic discharge (ESD),
observe the safety recommendations in DIN EN 100 015. Use only antistatic packaging
material. Be sure that the work station and the technician are properly grounded during
installation.
4/97 TNC 122 4 EPROM Sockets 7
Page 9
5 Power Supply
The voltage must comply with specifications:
Component Power supply Voltage range Max. power
Power consumption
consumption
NC Primary clocked
power supply
100 – 240 V
(–15% to +10%)
— Approx. 19 W
48 – 62 Hz
PLC 24 V
(with basis
insulation
according to
Lower limit
20.4 V__....
Upper limit
31 V __....
1)
Max. 10 mA per input
Max. 100 mA per output
EN 50 178)
1)
Voltage surges up to 36 V __.... for t < 100 ms are permissible.
All small contactors and relays must have a quenching diode.
PLC power supply
The PLC (PLC inputs and outputs) of the TNC 122 is powered from the 24 V machine control voltage
supply.
Danger to internal components!
Connect inductive loads only with a quenching diode parallel to the inductance.
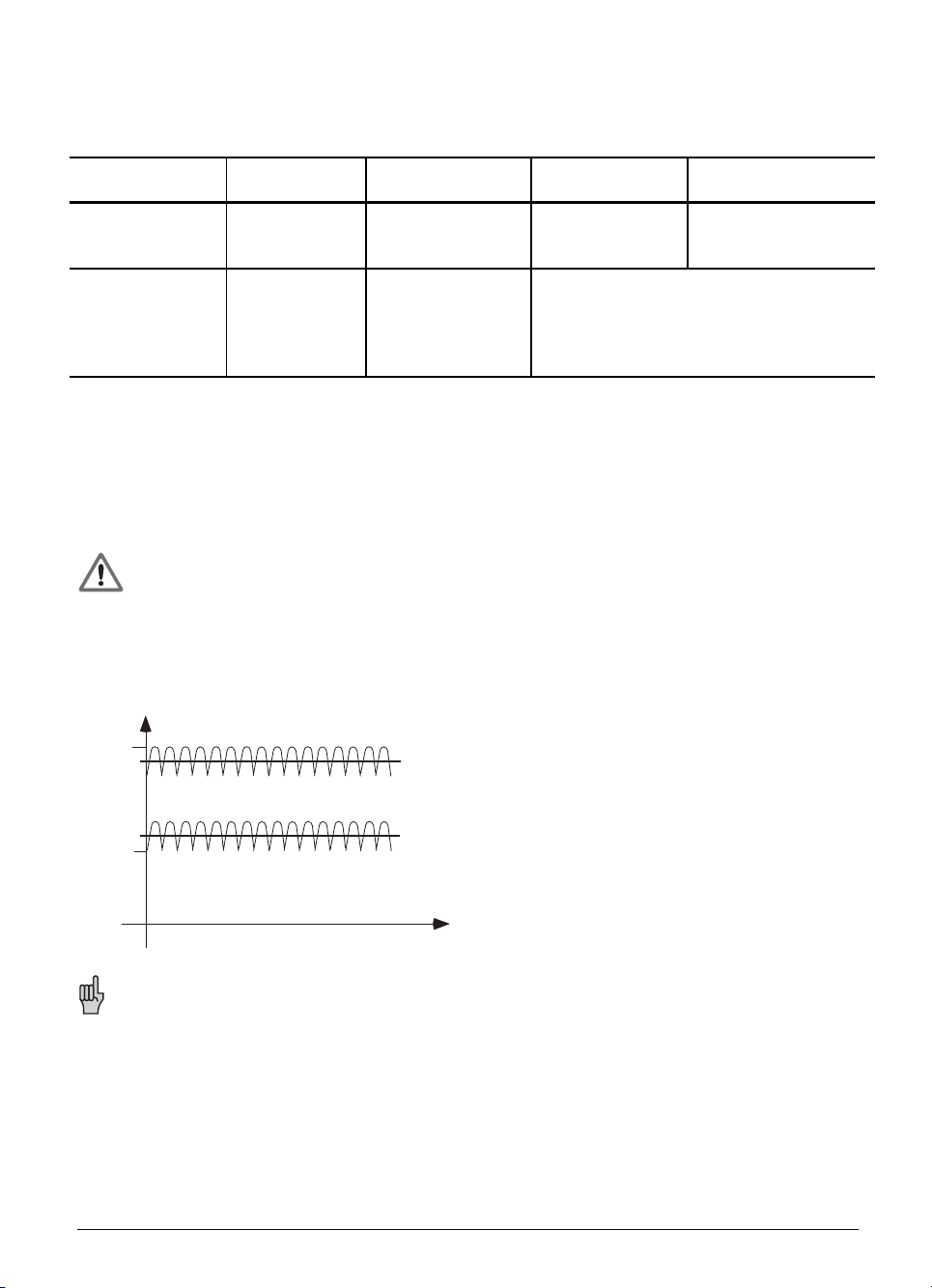
Superposed AC components as they arise from a three-phase bridge rectifier without smoothing
(see DIN 40110/1075, Section 1.2) must not exceed 5%. This results at the upper limit in the
absolute value 33.4 V and at the lower limit the absolute value of 18.5 V.
U
32.6 V
31 V
20.4 V
18.5 V
t
To increase the noise immunity, connect the ground terminal on the rear panel to the
central ground point of the machine.
(Minimum cross-section: 6 mm
The 0 V line of the PLC power supply must be grounded with an earth lead (∅ ≥ 6 mm
2
)
2
) to the main
frame ground of the machine.
8 TNC 122 5 Power Supply 4/97
Page 10
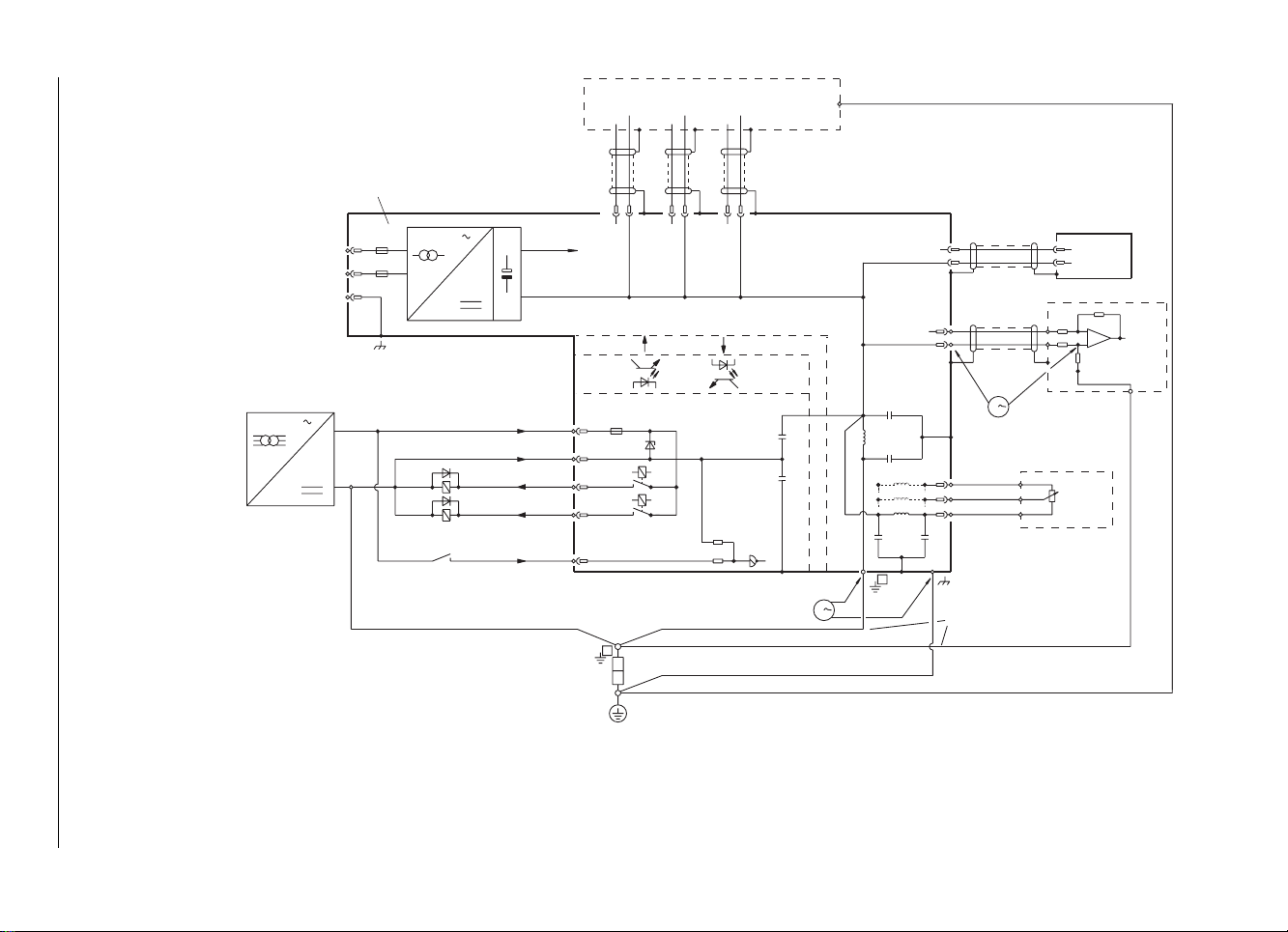
4/97 TNC 122 6 Grounding Diagram 9
Machine-Encoders
321
6 Grounding Diagram
Line voltage
100 - 240V
Line frequency
50 - 60 Hz
PLC supply voltage
with basic insulation
3
X51
TNC 122
L1
N
PE
+24V-
0V
X1 X2 X3
SI
SI
1
stab. power
supply
0V
X21
Adapter
V.24
X41/23
Motor controller
with nominal value
0V
difference input
Pot. for
feed rate
X41/9
X41/33
0V +24V-
15 outputs
0,1A
EMERGENCY STOP
0,1A
16 inputs
X41
X41/10
X41
6mm
Optoc.
SI
2
B
1
0
6mm
6mm
6mm
6mm
2
2
2
2
C
C
Test point 1
(Fault voltg. 0V/
housing)
V
C
L
C
L
B
X41/22
V
Test point 2
(Fault voltg. with
grounded nominal
value input)
X41/48
X41/24
X41/47
CC
If nominal value input is grounded,
a ground loop will result. Therefore
be sure that 0 V and ground wire
are short and configured for low noise.
Page 11
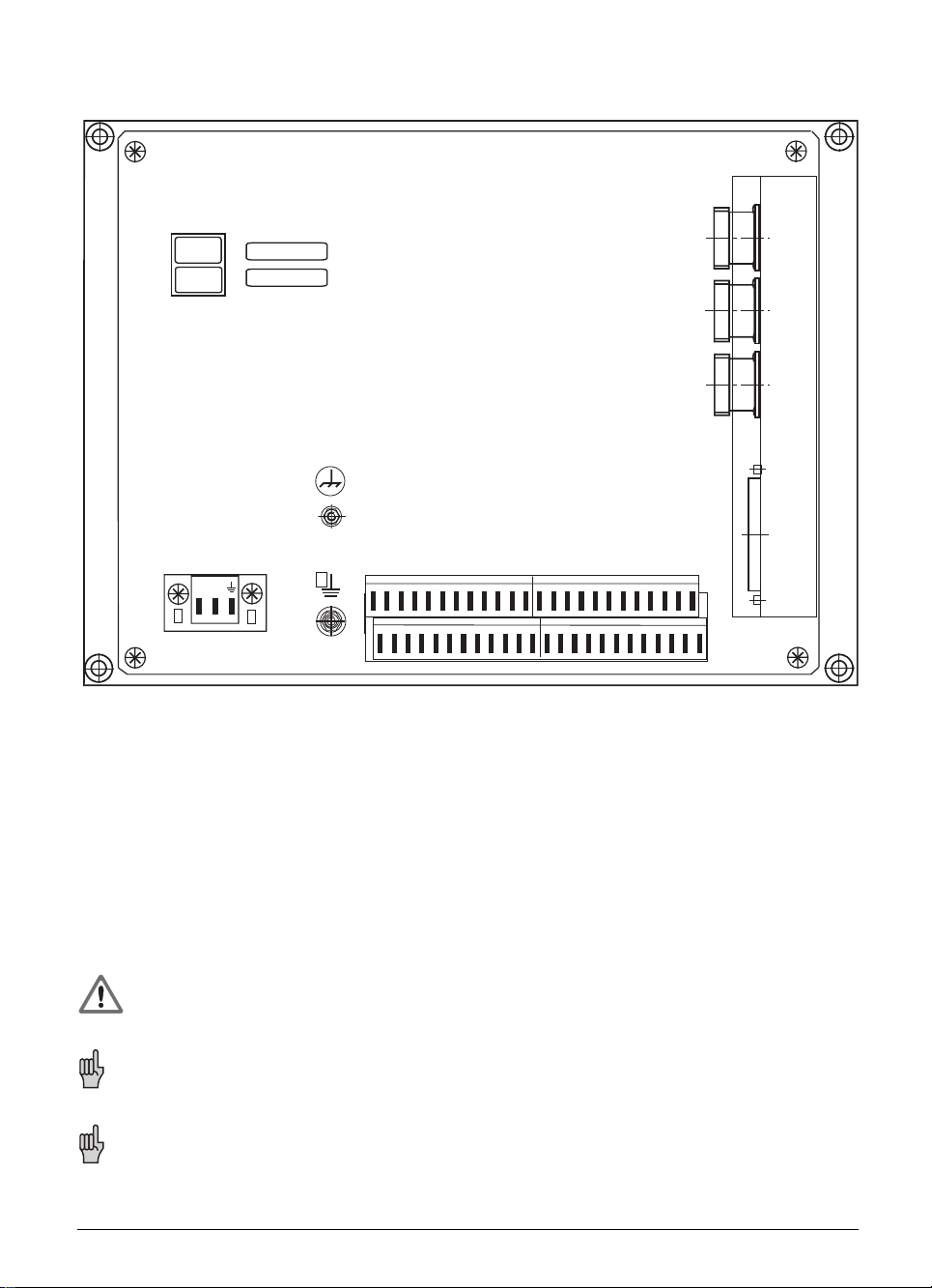
7 Connections
X1 = Encoder 1
X2 = Encoder 2
X3 = Encoder 3
L1
X51
N
NC xxx xxx xx
PLC xxx xxx xx
X1
X2
X3
X21
12
B
3 4 5 6 7 8 9 101112 1314 151617 18192021222324
25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 434445 46 47 48
X41(EXT)
X21 = RS-232-C/V.24 data interface
X41 = PLC inputs/PLC outputs/analog output/feed rate override/24 V PLC
X51 = Power supply
B = Signal ground
Danger to internal components!
Do not engage or disengage any connections while the unit is under power.
Interfaces X1, X2, X3, X21 comply with the recommendations in EN 50 178 for separation
from line power.
The outputs at connection X41 are metallically isolated from the device electronics by
means of optocouplers.
10 TNC 122 7 Connections 4/97
Page 12
8 Pin Layout
X1, X2, X3 Pin number Assignment
Encoder input
Flange socket with 5 I2+
9-pin female insert 6 I2–
X21 Data interface Pin number Assignment
RS-232-C/V.24
D-sub connector with 3 TXD
25-pin female insert 4 CTS
1I
2I
7I
8I
+
1
–
1
+
0
–
0
3+ 5 V
40 V
9 Internal shield
Housing External shield
1 Housing
2RXD
5RTS
6DTR
7 GND signal ground
8 – 19 Do not use
20 DSR
21 – 25 Do not use
X51 Power connector Pin number Assignment
L1 Live (230 V, F2.5 A fuse)
Terminal board, 3-pole N Neutral
Protective ground
Power consumption: typically 10 W
4/97 TNC 122 8 Pin Layout 11
Page 13
X41 TNC 122 Connection-assignment TNC 121
Contact Contact
PLC inputs
PLC outputs
Feed rate override
PLC power supply
1 I8 High=M26/ Low=M27
2 I9 High=M24/ Low=M25
3 I10 High=M22/ Low=M23 or M09
4 I11 High=M20/ Low=M21 or M05
5 I12 M08 coolant ON/ M09 OFF
Terminal board, 6 I13 M04 left spindle ON/ M05 OFF
48 contacts 7 I14 M03 right spindle ON/ M05 OFF
8 I15 acknowledgment M function
9 +24 V PLC
10 Control-is-ready output
11 O13 M04 left spindle ON/ M05 OFF or High=M18/
Low M19
12 O11 High=M20/ Low=M21 or M05
13 O9 High=M24/ Low=M25
14 O7 High=M28/ Low=M29
15 O5 Output for negative traverse direction (for one-
13
quadrant drives)
Erosion (205430) M02,M30 switches the output = 0
16 O4 Output for rapid traverse
11
(erosion 205430 M02,M30 Stop-erosion output=0)
17 O3 Output for Z axis enable 18
18 O2 Output for Y axis enable 20
19 O1 Output for X axis enable 22
20 O0 Output for Manual operating mode 16
21 not assigned
22
0 V
Analog voltage 8
23 +/– 10 V Analog voltage (depending on MP 70) 9
24 Feed rate override (wiper
)
4
25 I0 Input NC start 1
26 I1 Input NC stop 2
27 I2 Input rapid traverse key (Erosion 205430 erosion
7
ended, acknowledge with M36)
28 I3 Input for control-is-ready acknowledgment
29 I4 not assigned
30 I5 not assigned
31 I6 High=M23/ Low=M33
32 I7 High=M28/ Low=M29
33 0 V PLC 6
12 TNC 122 8 Pin Layout 4/97
Page 14
X41 TNC 122 Connection-assignment TNC 121
continued
The assignments are in accordance with the PLC Standard Program Id. Nr. 277 938 13!
Contact Contact
34 O14 M04 right spindle ON/ M05 OFF or High=M16/
Low=M17
35 O12 M08 coolant ON/ M09 OFF
36 O10 High=M22/ Low=M23 or M09
37 O8 High= M26/ Low=M27
38 O6 High=M32/ Low= M33
39 24 V for neg. traverse direction output 12
40 24 V for rapid traverse output 10
41 24 V for Z axis enable output 17
42 24 V for Y axis enable output 19
43 24 V for X axis enable output 21
44 24 V for “manual“ / “not manual“ output 15
45 “Not manual” output (inverted O0) 14
46 not assigned
47 Feed rate override 0 V 3
48 Feed rate override 15 V 5
The 24 Vdc power supply is monitored for reverse polarity and overvoltage. Reverse
polarity blows a fuse (F 2.0 A). Overvoltage above 47 V destroys the damping diode and
blows the fuse. Maximum current load is 300 mA.
PLC outputs: Inductive loads are permitted only with anti-surge diode!
Change of the I/O assignment only if Program 205 430 is active:
With the M functions M02 an M30 the output is switched to zero. Through the M function M36 the
output O5 is switched to 1 and is used to start the erosion process. Through input I2 the function
M36 is acknowledged and indicates that erosion has ended. In this case the feed-rate potentiometer
is without function.
4/97 TNC 122 8 Pin Layout 13
Page 15
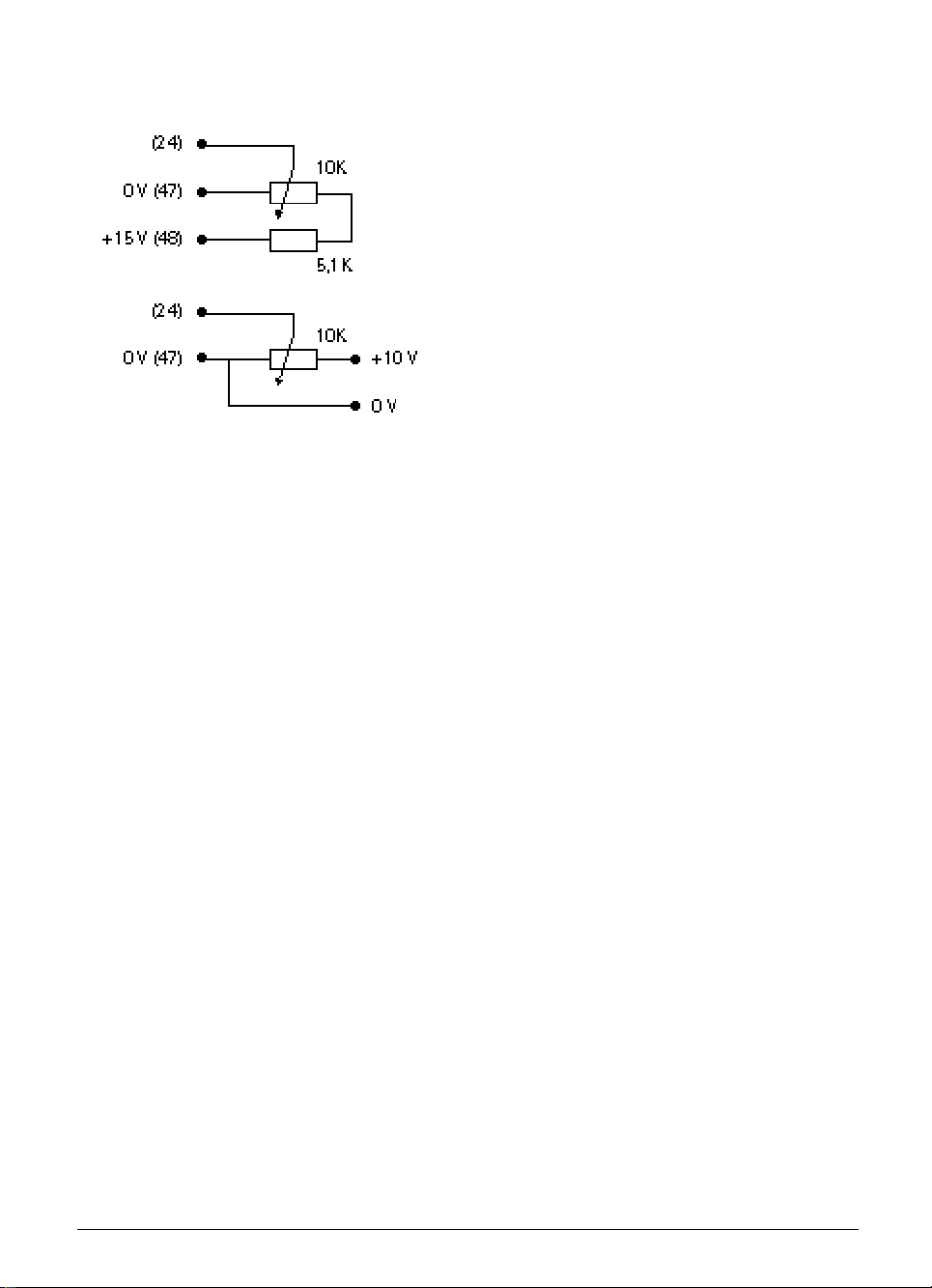
Installation of the Potentiometer:
6OLGHU
6OLGHU
Internal-source voltage for pot
External-source voltage for pot
14
TNC 122 8 Pin Layout 4/97
Page 16
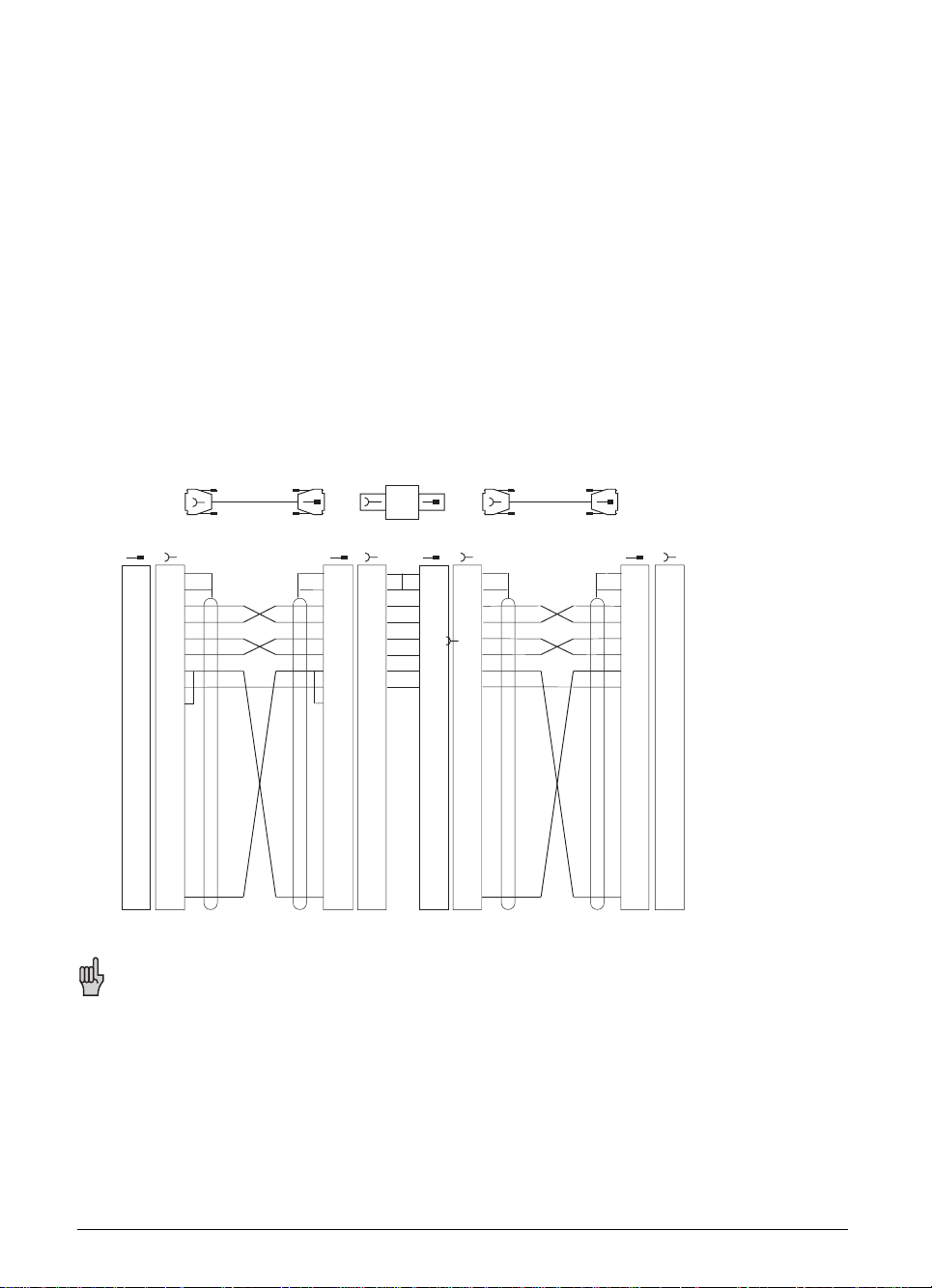
X21 Data Interface
The TNC 122 is equipped with an RS-232-C/V.24 data interface for operation in FE or EXT mode (see
the User's Manual). Programs and a list of the machine parameters can be output though this
interface. An RS-232-C adapter must be provided for a peripheral unit, such as a PC, FE 401, or
printer, to be connected to the control panel. The following drawing illustrates how to connect the
adapter block to X21.
HEIDENHAIN guarantees that, if properly connected, the RS-232-C/V.24 serial interface will reliably
transmit data between the TNC and a peripheral unit up to a distance of 20 meters.
HEIDENHAIN provides a standard cable 3 meters in length (Id.-Nr. 274 545 01) for connecting
peripheral units.
The data format in FE and EXT mode is fixed at 7 data bits, 2 stop bits and even parity. The FE mode
operates with ACK/NAK handshake, the EXT mode with DC1/DC3 handshake and RTS/CTS. The
data transfer rates are 9600 baud in FE mode and 2400 baud in EXT.
Peripheral
unit
GND
TXD
RXD
RTS
CTS
DSR
GND
DTR
3 m
Id.-Nr. 274 545 01
WH/BN WH/BN WH/BN
•
1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
2
3
4
5
6
•
7
8
9
10
11
12
13
14
15
16
17
18
19
20
•
WH/BN
GN
YL
GY
PK
BL
RD
BN
V.24-Adapter Block
Id.-Nr. 239 758 01
•
•
•
•
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
17
17
18
18
19
19
20
20
•
1
••
2
3
4
5
6
7
8
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
17
17
18
18
19
19
20
20
Id.-Nr. 239 760..
•
1
2
3
4
5
6
7
8
9
max. 17 m
YL
GN
PK
GY
BN
RD
BL
•
1
•
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
17
17
18
18
19
19
20
20
X21 RS-232-C/V.24
GND Chassis
RXD Receive data
TXD Transmit data
CTS Clear to send
RTS Request to send
DTR Data terminal ready
GND Signal ground
DSR Data set ready
The interface complies with the recommendations in EN 50 178 for separation from line
power.
4/97 TNC 122 8 Pin Layout 15
Page 17
9 Machine Integration
9.1 Encoders
You can continue to use the same incremental position feedback encoders on the TNC 122, as you
used on the TNC 121.
Signal period
The signal period of the linear encoder is entered in machine parameter MP330.x (in µm). On linear
encoders with sinusoidal output signals, the signal period is the same as the grating period:
Signal period (~) = Grating period
The standard linear encoders from HEIDENHAIN have a grating period of 20 µm. Older encoders
have a grating period of 40 µm.
If linear position feedback is carried out with a rotary encoder on the ballscrew, then to calculate the
signal period you must consider not only the line count of the encoder (see the technical data for the
encoder) but also the pitch of the ballscrew:
Signal period (~) =
MP330
MP330.0 Axis 1
MP330.1 Axis 2
MP330.2 Axis 3
Machine parameter MP7320 can set the encoder amplitude so that older encoder models (on
machines with TNC 121) can be adapted to the TNC 122.
MP7320
Signal period
Input values: 4, 10, 20, 40, 100, 200 [µm]
Switchover of encoder input amplitude
Input values: 0 to 7
Bit 0 Axis X +0 = 16 µA
Bit 1 Axis Y +0 = 16 µA
Bit 2 Axis Z +0 = 16 µA
Screw pitch [mm] · 1000 [µm/mm]
Line count
+1 = 40 µA
+2 = 40 µA
+4 = 40 µA
16 TNC 122 9 Machine Integration 4/97
Page 18

Traverse direction
Machine parameters MP210 and MP1040 define the axis traverse direction. The traverse directions
for the axes on numerically controlled machine tools are specified in DIN.
MP210 defines the counting direction of the encoder signals. The counting direction depends on the
mounting configuration of the encoders.
MP210
MP1040 defines the polarity of the nominal voltage for positive direction of traverse.
MP1040
Assignment of encoder inputs
The individual axes can be assigned to the encoder inputs X1 to X3 with machine parameter MP110.
MP110
Counting direction of encoder signals
Input values: 0 to 7
Bit 0 Axis X +0 = positive
+1 = negative
Bit 1 Axis Y +0 = positive
+2 = negative
Bit 2 Axis Z +0 = positive
+4 = negative
Polarity of the nominal voltage with positive direction of traverse
Input values: 0 to 7 (must be "0" if MP70 is on "1" or "2")
Bit 0 Axis X +0 = positive
+1 = negative
Bit 1 Axis Y +0 = positive
+2 = negative
Bit 2 Axis Z +0 = positive
+4 = negative
Assignment of axes to encoder inputs
Input values: 0 to 2
0 = encoder input X1
1 = encoder input X2
2 = encoder input X3
MP110.0 Axis 1
MP110.1 Axis 2
MP110.2 Axis 3
9.2 Traverse Ranges
The traverse ranges are set with machine parameters. The traverse ranges are defined by software
limit switches. The input values for the software limit switches are based on the scale datum.
If the machine moves to a software limit switch, the following error message appears:
LIMIT SWITCH <axis>...
and the corresponding marker is set (M2624 to M2629).
4/97 TNC 122 9 Machine Integration 17
Page 19

MP 910
Entry range: –9999.999 to +9999.999 [mm]
MP910.0 Software limit switch axis X+
MP910.1 Software limit switch axis Y+
MP910.2 Software limit switch axis Z+
Positive traverse direction
MP 920
MP920.0 Software limit switch axis X–
MP920.1 Software limit switch axis Y–
MP920.2 Software limit switch axis Z–
M2624
M2625
M2626
M2627
M2628
M2629
Negative traverse direction
Entry range: –9999.999 to +9999.999 [mm]
Set Reset
Limit switch axis X+ NC NC
Limit switch axis X– NC NC
Limit switch axis Y+ NC NC
Limit switch axis Y– NC NC
Limit switch axis Z+ NC NC
Limit switch axis Z– NC NC
9.3 Reference Marks
For workpiece machining, the datum setting procedure assigns a unique position value (coordinate)
to each axis position. Since the actual position values are generated incrementally by the encoder,
this relationship between axis positions and position values must be restored each time the power is
interrupted.
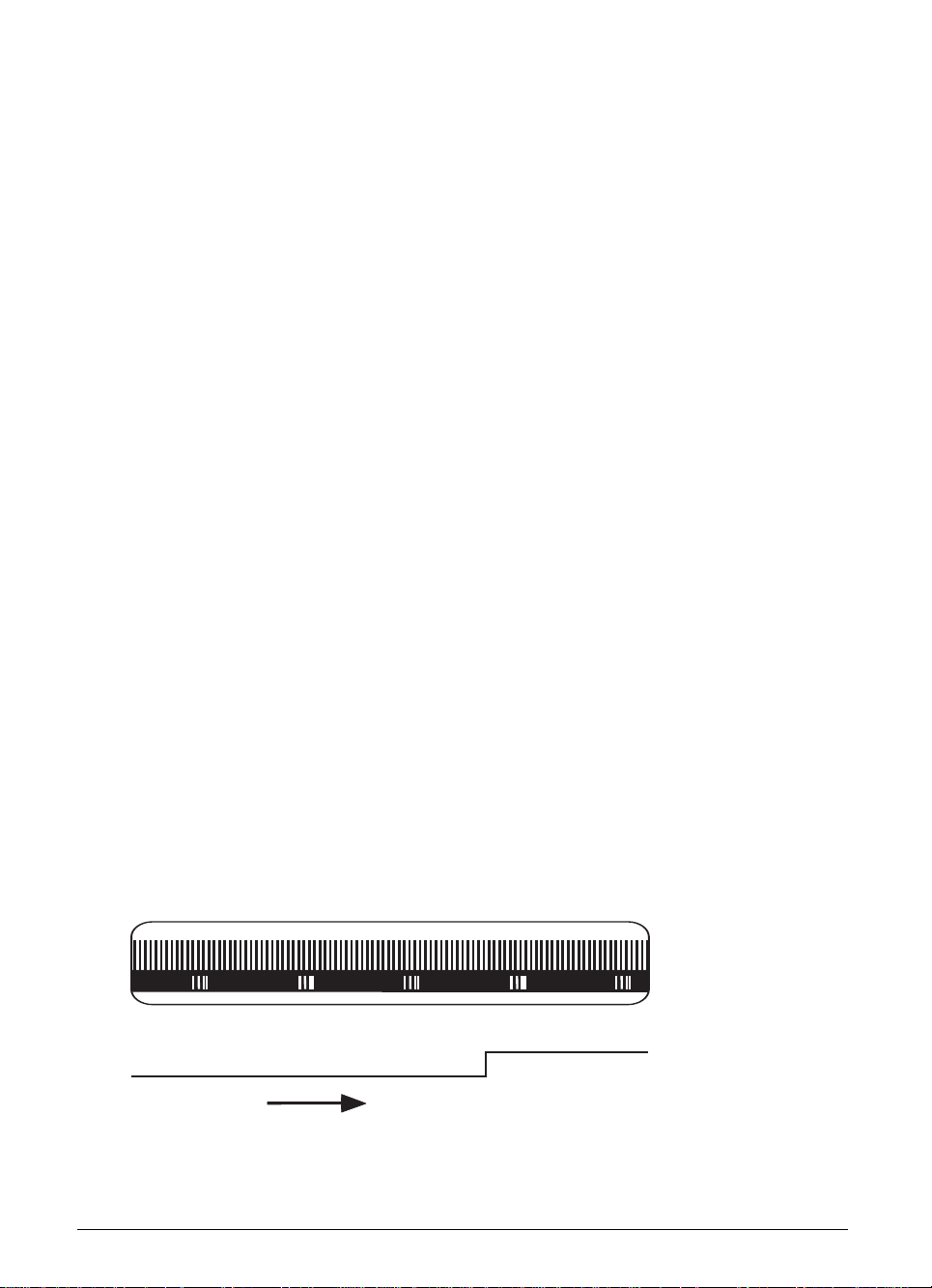
HEIDENHAIN linear encoders are provided with one or more reference marks. When a reference
mark is traversed, a signal is generated that identifies that position as a reference point. After a
power interruption, crossing over the reference marks will restore the relationship between axis
slide positions and position values that was last established through the datum setting procedure.
Crossing over the reference marks also restores all machine-based references.
Since it is inconvenient to move the axes over large traverses to restore the reference point,
HEIDENHAIN recommends position encoders with distance-coded reference marks. On these
encoders the absolute position value is available after crossing two reference marks.
18 TNC 122 9 Machine Integration 4/97
Page 20
9.3.1 Traversing the Reference Marks
The reference marks of the axes should be traversed after the control is switched on. Machines
with the TNC 121 are usually equipped with scales that have a reference mark at each end. To
prevent the software limit switch ranges from being shifted, always traverse the reference mark
upon which the software limit switches are based.
If referencing is not desired, it can be deactivated with machine parameter MP1340.x or by pressing
the NO ENT key.
To traverse the reference marks, press the machine axis direction buttons. The sequence of axes is
determined by the user.
When the reference marks are crossed over,
the software limit switches are activated
•
the datum point last set is restored
•
If the position encoders have distance-coded reference marks, the machine datum is based on the
scale reference point (on linear encoders the scale reference point is the first reference mark after
the start of the measuring length; on angle encoders the scale reference point is marked).
Manual execution (standard process)
The reference mark is traversed with the axis-direction keys.
Automatic execution (not in TNC 122)
The direction of traverse and the speed when crossing over the reference marks is defined with
machine parameters (MP1320.x, MP1330.x). The sequence of functions when crossing over the
reference marks can be defined separately for each axis with MP1350.x.
A trip dog for the reference end position is necessary to prevent the traverse range from being
exceeded when the reference marks are crossed over. Install the trip dog at the end of the traverse
range. The trigger signal line from the trip dog is connected to a vacant PLC input. In the PLC
program, this PLC input is combined with the markers for “Reference end position” (M2556 to
M2558)
Encoders with distance-coded reference marks
Machine parameter MP1350.x=0
Reference marks
Trip dog
Closed
Open
Traverse direction MP1320.x
4/97 TNC 122 9 Machine Integration 19
"Reference end position"
Page 21

Sequence for “Automatic reference mark traverse” (pressing the machine START key).
MP1350.x = 0
Press the external START key
No Yes
"Reference end position"
Machine moves
in direction from
MP1320.x
Trip dog
"Reference end position" is
closed before two successive
reference marks are
traversed
No
Two successive reference marks traversed
Trig dog
closed?
Ye s
Machine moves in inverted
traverse direction from
MP1320.x
Is the machine
outside the software
limit switch range?
No
Machine stops
software limit switch
Ye s
Machine moves to
20 TNC 122 9 Machine Integration 4/97
Page 22

Encoders with one reference mark
Machine parameter MP1350.x = 1
Reference marks
Closed
Open
Trip dog
"Reference end position"
Traverse direction MP1320.x
4/97 TNC 122 9 Machine Integration 21
Page 23

Sequence for “Automatic reference mark traverse” (pressing the machine START key).
MP1350.x = 1
Press the machine START key
No Yes
Machine moves
in direction from
MP1320.x
Trip dog
"Reference end position"
is closed before reference
mark is passed over
No
Reference mark is passed over
Trip dog
"Reference end position"
closed?
Ye s
Machine moves in
inverted direction from
MP1320.x
Is the machine
outside the software
limit switch range?
No
Machine stops
software limit switch
Ye s
Machine moves to
22 TNC 122 9 Machine Integration 4/97
Page 24

MP1320 Traverse direction for crossing over the reference marks with EXT start
Input values: 0 to 7
Bit 0 Axis X +0 = positive
+1 = negative
Bit 1 Axis Y +0 = positive
+2 = negative
Bit 2 Axis Z +0 = positive
+4 = negative
MP1330 Feed rate for crossing over the reference marks
Entry range: 80 to 30 000[mm/min]
MP1330.0 Axis X
MP1330.1 Axis Y
MP1330.2 Axis Z
MP1340 Sequence when crossing over the reference marks
Input values: 0 = no reference mark evaluation
1 = 1st axis
2 = 2nd axis
3 = 3rd axis
MP1340.0 Axis X
MP1340.1 Axis Y
MP1340.2 Axis Z
MP1350 Sequence for crossing over reference marks
Input values: 0 = encoder with distance-coded reference marks
1 = encoder with one reference mark
MP1350.0 Axis X
MP1550.1 Axis Y
MP1350.2 Axis Z
Set Reset
M2556 Reference end position for axis X PLC PLC
M2557 Reference end position for axis Y PLC PLC
M2558 Reference end position for axis Z PLC PLC
4/97 TNC 122 9 Machine Integration 23
Page 25

9.4 Position Feedback Control of the NC Axes
The TNC 122 operates according to the principle of closed-loop control with servo lag. Servo lag
means that there is always a difference (trailing error) between the nominal position commanded by
the NC and the actual position of the axes. Closed-loop control would not be possible without this
difference.
The k
factor (position loop gain) must be matched to the machine (see also “Characteristic kink”). If
v
a very high k
machine axis. If the k
The maximum feed rate (not the rapid traverse) is defined in machine parameter MP1010.0–2. It
represents the feed rate at an analog voltage of 11 V at the servo input.
The acceleration can be entered in machine parameter MP1060.x. It determines the ramp gradient
of the rising edge (MP1060.0–2) and the approach to the position (MP1060.3–5).
To improve the positioning behavior, machine parameter MP1051.x can be used to define a bottom
voltage below which the control will not go.
When the axis is in position (the positioning window has been reached) the “axis in position” marker
is set. The PLC program must then disable the position controller for the axes to come to a stop.
factor is chosen the servo lag will be very small, but this may cause oscillations in the
v
factor is too small, the new position will be reached too slowly.
v
The optimum k
behavior at different k
factor must be determined empirically. The following diagram illustrates traversing
v
factors:
v
U [V]
kv correct
kv too large
kv too small
MP1810
MP1060.0-2
MP1060.3-5
t [s]
The kv factor (MP1810) is generally determined by the maximum feed rate of the machine (MP1010)
and the servo lag according to the following formula:
Ve
=
k
k
v
s
a
= position loop gain [
v
ve = maximum feed rate [
= servo lag [mm]
s
a
m/min
mm
m
min
]
]
or
Ve
s
=
a
k
v
24 TNC 122 9 Machine Integration 4/97
Page 26

Rapid traverse control
For operation at rapid traverse, both programmed and manually actuated, MP80 determines the
analog supply voltage for the motor controllers. The machine's circuit diagram will indicate whether
the controller input should be supplied by external analog voltage or the analog voltage of the
control, and whether amplified tachometer signals are used.
Programming of rapid traverse: Select the axis, enter the value, press and hold the machine rapid
traverse button, confirm by pressing the "ENT" key.
External analog voltage for rapid traverse at the controller input (MP80 =1):
If MP80 = 1, the controller will be switched to external analog voltage supply when the machine
axes are moving at rapid traverse. The control loop remains closed although the control is not
monitoring it. The control does not begin monitoring the loop until the axis comes within a certain
distance to the target position. This distance is defined in MP4210 and is transmitted to the PLC. To
resume feedback control, the PLC resets the "rapid traverse" output (X41, pin 16).
In order to ensure that servo lag monitoring does not respond during rapid traverse, the control
operates internally with a rapid traverse from MP1010.3-5 and a “servo lag” is internally adjusted
such that it remains within the permissible range of servo lag monitoring (floating nominal value).
The servo lag internal adjustment is defined with machine parameter MP1850 such that no
oscillations result. The rapid traverse in MP1010.3-5 must correspond with the actual rapid traverse.
The correct setting for the internal adjustment can be checked in a special display (activated with
MP7322) showing the actual feed rate, the analog voltage of the control and the internal nominal
servo lag as a percentage of the actual servo lag.
If the display sways between 80% and 120% this results in oscillations within the control. These
oscillations can be prevented by properly setting MP1850. The setting in MP1010.x is correct if the
display remains stable at approx. 100%. The behavior of the floating nominal value can also be
measured at the analog output with an oscilloscope.
Analog voltage of the control for rapid traverse at the servo input of (MP80 = 2):
If the feedback input is supplied from the control during rapid traverse and the tachometer voltage
must be switched, then enter the value 2 in MP80. In MP1010.3-5 enter the same rapid traverse
rate as the machine had with the TNC 121.
MP1010 Feed rate at 10 V analog voltage
Input: 80 to 30 000 [mm/min]
MP1010.0 Axis X
MP1010.1 Axis Y
MP1010.2 Axis Z
Rapid traverse for amplified tachometer signals or external rapid traverse voltage
Input range: 80 to 30 000 [mm/min]
MP1010.3 Axis X
MP1010.4 Axis Y
MP1010.5 Axis Z
4/97 TNC 122 9 Machine Integration 25
Page 27

MP1050 Analog voltage for rapid traverse
Input range: 4.5 to 11.0 [V]
MP1050.0 Axis X
MP1050.1 Axis Y
MP1050.2 Axis Z
MP1051 Lower limit of analog voltage
Input range: 0 to 35 [transformer increment]
(1 transformer increment = 2.93 mV)
MP1051.0 Axis X
MP1052.1 Axis Y
MP1053.2 Axis Z
MP70 Bipolar or unipolar analog voltage
Input: 0 or 2
0 = bipolar
1 = unipolar, traversing the position outputs 0 volt
2 = unipolar, traversing the position inverts the voltage
MP80 Supply voltage for position controller during rapid traverse
Input range: 0 to 2
0 = Reserved
1 = Controller input supplied with external voltage (MP1850)
2 = Controller input supplied with analog voltage from the control
MP1060 Acceleration during position approach
Input range: 0.001 to 3.0 [m/s
2
]
MP1060.0 Axis X
MP1060.1 Axis Y
MP1060.2 Axis Z
Deceleration during position approach
Input range: 0.001 to 3.0 [m/s
2
]
MP1060.3 Axis X
MP1060.4 Axis Y
MP1060.5 Axis Z
MP1810 k
factor
v
Input range: 0.10 to 10.00 [
m/min
mm
]
MP1810.0 Axis 1
MP1810.1 Axis 2
MP1810.2 Axis 3
26 TNC 122 9 Machine Integration 4/97
Page 28

MP1850 Proportion for internal adjustment of servo lag (if MP80 = 1)
Input range: 0 to 65535
Characteristic kink
To enable correct processing of the internal nominal value on machines that have a high rapid
traverse speed, the k
In such cases a characteristic kink can be entered, providing the following advantages:
factor must be adjusted to this speed range.
v
• a normal k
• a separate k
The position of this characteristic kink is defined in machine parameter MP1830. In the upper range
the k
v
U [V]
MP1830
The kink point must lie above the range of machining feed rates. Under these conditions the lag can
be calculated as follows:
Ve
s
=
a
k
100 [%] MP1820 · 100 [%]
factor for the machining feed rate
v
factor for rapid traverse
v
factor is multiplied by the factor in MP1820.
9
MP1810 · MP1820
MP1810 (= kv)
MP1830 [%] + 100 [%] – MP1830 [%]
·
[
v
sa
]
MP1820 Multiplication factor for the kv factor
Input range: 0.001 to 9.000
MP1820.0 Axis X
MP1820.1 Axis Y
MP1820.2 Axis Z
MP1830 Characteristic kink
Input range: 0.000 to 100.000 [%]
MP1830.0 Axis X
MP1830.1 Axis Y
MP1830.2 Axis Z
4/97 TNC 122 9 Machine Integration 27
Page 29

Offset compensation
An offset error can be compensated. An offset error exists if the axis drifts when the controller input
is supplied with 0V analog voltage. If the axis does drift, an offset voltage must be output to prevent
the drifting. To define the analog offset voltage, press MOD and enter the code number 75 368 to
call the “AV OFFSET” dialog prompt. The optimum input value (a multiple of 2.93 mV = 1
transformer step) must be determined empirically. Before this, the bottom voltage must be set to
zero with MP1051. For bipolar drives, enter the proper algebraic sign for the voltage.
Feed rate enable
It is only possible to move the axes if the feed rate enable is present in marker M2451 and
complementary marker M2467. If the feed rate enable is removed, the analog voltage output is 0 V
and the axes stop moving immediately.
Set Reset
M2451 Feed rate enable PLC PLC
M2467 Complementary feed rate enable PLC PLC
Axes in position
When the axes have reached the defined positioning window (MP1030.x), the “Axis in position”
markers are set by the NC. This is also done when the control voltage is switched on.
The markers will only be reset by the NC if the axes leave the positioning window when being
traversed. This also applies when the reference marks are crossed over.
Set Reset
M2008 Axis X in position NC NC
M2009 Axis Y in position NC NC
M2010 Axis Z in position NC NC
Open the control loop
In order to lock or disengage an axis, the control loop must be opened by the PLC. As soon as the
“Axis in position” markers (M2008 to M2010) are reset, the control loop must be closed again so
that the axis can be moved. Before the control loop is closed, an actual and nominal value transfer
must be performed.
Set Reset
M2544 Open control loop axis X PLC PLC
M2545 Open control loop axis Y PLC PLC
M2546 Open control loop axis Z PLC PLC
Actual/nominal value transfer
If markers M2552 to M2554 are set, the momentary actual position value is taken as the nominal
position value.
Set Reset
M2552 Actual/nominal value transfer axis X PLC PLC
M2553 Actual/nominal value transfer axis Y PLC PLC
M2554 Actual/nominal value transfer axis Z PLC PLC
28 TNC 122 9 Machine Integration 4/97
Page 30

9.5 Monitoring Functions
The NC monitors the axis positions and the dynamic behavior of the machine. If the fixed values in
the machine parameters are exceeded, an error message is displayed and the machine is stopped.
Position, standstill and movement are monitored.
Position monitoring
Machine parameters MP1720.x determine the range for the continuous position monitoring of the
machine (servo lag monitoring). Monitoring goes into effect as soon as the axes are under control of
the position control loop. If the limits in MP1720 are exceeded, the following blinking error message
appears:
POS. ERROR A <axis>
The control must be switched off to correct this error. Realistic input values are approximately 1 to
1.4 times the servo lag at rapid traverse.
MP1720
Movement monitoring
At short intervals (several control cycles) the path actually traversed is compared with the nominal
path as calculated by the NC. If the path traversed during this interval deviates from the calculated
path, the following blinking error message will appear:
Movement monitoring is not active below the voltage entered in machine parameter MP1140.
If 12 [V] is entered in this machine parameter, no movement monitoring will be in effect.
It is not possible to safely operate the machine without movement monitoring.
MP1140
Standstill monitoring
This monitoring goes into effect when the axes have reached the positioning window. The range
within which the axes may move is defined in MP1110. As soon as the position deviation is larger
than the value in MP1110, the following blinking error message is displayed:
The message will also appear during approach to a target position if an overshoot is larger than the
value entered in MP1110, or if the axis moves in the opposite direction at the beginning of a
positioning move.
Position monitoring
Input range: 0.001 to 200.000 [mm]
POS. ERROR C <axis>
Movement monitoring
Input range: 0.03 to 12.00 [V]
POS.ERROR D <axis>
MP1110
Positioning window
The positioning window defines the range within which the control considers a position to have
been reached. When the position has been reached, the control starts the execution of the next
block. The size of the positioning window is defined in MP1030.x.
4/97 TNC 122 9 Machine Integration 29
Standstill monitoring
Entry range: 0.001 to 30.000 [mm]
Page 31

When the axes reach the positioning window, markers M2008 to M2010 are set.
MP1030
Positioning window
Entry range: 0.001 to 2.000 [mm]
MP1030.0 Axis X
MP1030.1 Axis Y
MP1030.2 Axis Z
Encoder monitoring
Monitoring of the encoder signals must be activated with MP31.
If the signal amplitude is faulty the following error messages can appear:
ENCODER <axis> DEFECT If the signal amplitude is no longer being evaluated
AMPL <axis> TOO SMALL If the signal amplitude is too small
OVERLOAD <axis> If the signal amplitude is too large
MP31
Monitoring of the amplitude of the encoder signals
Input values: 0 to 7
Bit 0 Axis X +0 = no monitoring
+1 = monitoring active
Bit 1 Axis Y +0 = no monitoring
+2 = monitoring active
Bit 2 Axis Z +0 = no monitoring
+4 = monitoring active
30 TNC 122 9 Machine Integration 4/97
Page 32

9.6 Display and Operation
The position display can be set with MP7322 to show:
the actual position referenced to the currently set datum
•
the actual position referenced to the scale reference point
•
the current trailing error
•
the actual feed rates and the nominal voltage and % value for servo lag
•
MP7322
The display step for the axis positions can be selected with MP7290.
MP7290
Machine parameter MP7285 can be used to define whether the position of the tool tip or the face of
the spindle (zero tool) is displayed as the actual value.
MP7285
The TNC 122 can switched to different dialog languages with machine parameter MP7230.
Position display
Input values: 0 to 3
0 = Actual position referenced to the currently set datum
1 = Current servo lag
2 = Position referenced to scale reference point
3 = Actual feed rates, nominal voltage, % value for trailing error
Display step
Input values: 0 or 1
0 = 1 µm
1 = 5 µm
Take tool length into account in position display
Input values: 0 or 1
0 = position of tool tip is displayed
1 = position of zero tool is displayed
MP7230
4/97 TNC 122 9 Machine Integration 31
Dialog language
Input values: 0 to 7
0 = German
1 = English
2 = French
3 = Dutch
4 = Spanish
5 to 7 =
reserved
Page 33

Machine parameters can select whether the RAM and the EPROM are to be tested when the
control is switched on. When commissioning it is recommended that the memory test be
deactivated. The message “Memory test” is displayed during the memory test.
MP7690
The TNC 122 can also be used when no machine is connected to it. MP7210 sets the modes it can
then be used in.
MP7210
Memory test at switch-on
Input values: 0 to 3
0 = EPROM and RAM test at switch-on
1 = EPROM test at switch-on
2 = RAM test at switch-on
3 = No memory test at switch-on
Programming station
Input values: 0 to 2
0 = Control
1 = Programming station, PLC active
2 = Programming station, PLC not active
32 TNC 122 9 Machine Integration 4/97
Page 34

9.7 EMERGENCY STOP Circuit
The control has one PLC input (X41/28) and one PLC output (X41/10) with the designation “Control is
ready” for the EMERGENCY STOP routine.
If a malfunction is recognized in the control, the TNC switches the control-is-ready output off, a
blinking error message appears on the screen, the PLC program is halted and the outputs are reset.
This error message cannot be cleared. When the error has been corrected it is necessary to run
through the switch-on routine again.
If the control-is-ready input is switched off by an event outside the control, the following error
message will appear:
EMERGENCY STOP
The NC then sets markers M2190 and M2191. This error message cannot be cleared until the
control voltage is switched on again.
When an EMERGENCY STOP occurs all outputs are reset.
The control evaluates an external EMERGENCY STOP like an external and internal stop. If the
EMERGENCY STOP button is pressed while an axis is moving, the axis is brought to a stop. I
If the EMERGENCY STOP causes the servo amplifier to block, the output nominal values can
exceed the position monitoring defined by machine parameters. In such a case the following error
message will be displayed:
POS. ERROR <axis>
M2190
M2191
Set Reset
Non-blinking error message displayed NC NC
EMERGENCY STOP displayed NC NC
4/97 TNC 122 9 Machine Integration 33
Page 35

9.7.1 EMERGENCY STOP Connection Diagram
In case of a malfunction, the control-is-ready output should switch the 24 V supply voltage off.
Because this function is so critical, the TNC 122 checks this output each time the power supply is
switched on.
HEIDENHAIN recommends the following wiring:
TNC 122
Switch opens briefly when the control voltage
of each microprocessor is switched on
X41/10 X41/9 X41/28
"Control is
ready"
EMERGENCY
STOP
buttons
Control
voltage
on
If the control is not to be part of the EMERGENCY STOP circuit, output X41/10 must be shortcircuited with input X41/28.
k1
K1
24V not
interruptible
+ -
24 V
PLC
"Control ready"
feedback
k1
34 TNC 122 9 Machine Integration 4/97
Page 36

9.7.2 EMERGENCY STOP Flowchart
The external electronics must fulfill the prescribed basic requirements. In particular, the
acknowledgment for “control is ready” must be received within 200 ms.
X41/10
X41/28
1 2 3 4 5 6 7 8 9
Display
1 Waiting for control voltage. NO CONTROL VOLTG
2 Recognition of the control voltage at X41/28 and reset control-
is-ready output at X41/10.
3 Maximum time until control-is-ready signal at X41/28 must go
to 0 (t < 200 ms). If time limit is exceeded, error message:
4 Recognition of acknowledgment, output X41/10 set.
5 Waiting for control voltage. NO CONTROL VOLTG
6 Normal control operation. Output and control-is-ready
acknowledgment are set.
7 Control voltage switched off by external event. EMERGENCY STOP
8 When the control voltage is switched on again the error
message can be cleared; then return to normal operation.
9 If an error is detected, the control switches off the control-is-
ready output (X41/10).
EMERG STOP DEFEC
Blinking error message
4/97 TNC 122 9 Machine Integration 35
Page 37

10 Exchanging the Control
The control should be exchanged only on machines that are recommended by HEIDENHAIN. If you
wish to retrofit other machines, contact your HEIDENHAIN service representative.
The PLC EPROM contains the appropriate machine parameters and the PLC program for the
following software types of the TNC 121. These are activated with a code number (see below).
Software of the
TNC 121
205 438 1
205 443 2
205 329 2
205 444 3
205 446
205 455
205 456
205 457
205 430
The TNC 122 with standard PLC program can also replace a TNC 121 with SE 121
(see machine parameters MP4xxx for more information on this.)
Proceed as follows to replace the TNC 121 by the TNC 122:
Before removing the TNC 121
• Check the software number to see whether the PLC and NC software number of the TNC122
can perform the functions of the TNC 121 (see the above table). If there is any doubt, contact
your HEIDENHAIN service representative.
PLC software no.
TNC 122
277 939 14 246 117 08 4
NC software no.
TNC 122
Code no.
5
6
7
8
• Determine the following parameters and functions of the machine with the TNC 121 still
installed:
What is the maximum feed rate? What is the analog voltage at the maximum feed rate?
Is the analog voltage for the rapid traverse supplied by the control or by an external source
(shown on wiring diagram)?
Are the drives bipolar or unipolar?
Axis lock yes/no?
Reference mark traverse desired yes/no?
• Determine the pin layout of the terminal board using the circuit diagram and mark the wires for
the connection to X41 of the TNC 122.
Removing the TNC 121
• Disconnect the power supply, disconnect the cable from the terminal board, remove the
encoder connector.
• Remove the mounting screws, remove the housing.
36 TNC 122 10 Exchanging the Control 4/97
Page 38

Installing the TNC 122
• Insert sponge rubber gasket, slide unit into position, tighten screws.
Insert encoder connectors, wire connector X41 according to the documented layout of the
TNC 121 (see connector layout X41).
Connect power supply.
• Differences compared to TNC 121:
Connect signal ground to the central ground point of the machine.
Include control-is-ready output (X41/10) and control-is-ready input (X41/28) in the emergency
stop circuit (see Section 9.7).
Commissioning the TNC 122:
• Switch on the control.
• Activate the appropriate PLC program and machine parameters with the code number as
follows:
– Press the MOD key
– Enter code number 77 80 83
– Press the ENT key
– Press the MOD key
– Enter the appropriate code number from the above list
– Press the ENT key
Depending on the model of machine and its mechanical condition it may be necessary
to re-optimize the machine parameters that affect the control loop. especially
parameters MP1010, MP1030, MP1050, MP1051, MP1060, MP1810 and MP1850.
This requires checking the analog output and the tachometer voltage with an
oscilloscope.
• If desired, set the software limit switch ranges to conform to maximum permissible traverse.
Note:
The software limit switches are always referenced to a fixed reference mark!
Ensure that the same reference mark is always used for referencing.
Test all functions.
11 Machine Parameters
11.1 Entering and Changing Machine Parameters
A list of machine parameters is accessible through the MOD function
operation mode. To call the complete list of machine parameters, enter the code number 95148. A
subset of MOD functions is more readily available through the MOD function
machine parameters included in the user parameters are indicated in the following list with *). It is
possible to change these parameters.
The values of the machine parameters can be changed as follows:
• Select the list of machine parameters.
• Use the arrow key to select the desired machine parameter.
• Enter the new value.
• Confirm your entry by pressing ENT.
To leave the list of machine parameters, press DEL.
4/97 TNC 122 11 Machine Parameters 37
Code number
User parameters.
in the manual
The
Page 39

11.2 Machine Parameter List
Machine
Parameter
MP 31 Monitoring of encoder signal amplitude
MP 40 Displayed axes
MP70 Analog output bipolar or unipolar
MP80 Analog voltage source for rapid traverse from
MP110.0-2 Assignment of encoder inputs to the machine
MP210 Counting direction of encoder signals
MP330.0-2 Grating period
Function and input Input value
Input values: 0 to 7
Bit 0 Axis X +0 inactive
+1 active
Bit 1 Axis Y +0 inactive
+2 active
Bit 2 Axis Z +0 inactive
+4 active
Input values: 0 to 7
Bit 0 Axis X +0 not displayed
+1 displayed
Bit 1 Axis Y +0 not displayed
+2 displayed
Bit 2 Axis Z +0 not displayed
+4 displayed
Input values: 0 or 2
0 = bipolar
1 = unipolar (ensure that MP1040 = 0!)
traversing the end position outputs 0 V
2 = unipolar, traversing the end position inverts
the nominal-value voltage
the control or from external source
Input values: 0 to 2
0 =
reserved
1 = analog voltage from external source
2 = analog voltage from control
(Position control loop closed)
axes
Input values: 0 to 2
0 = encoder input X1
1 = encoder input X2
2 = encoder input X3
Input values: 0 to 7
Bit 0 Axis X +0 = positive
+1 = negative
Bit 1 Axis Y +0 = positive
+2 = negative
Bit 2 Axis Z +0 = positive
+4 = negative
Input values: 4, 10, 20, 40, 100, 200 [µm]
38 TNC 122 11 Machine Parameters 4/97
Page 40

Machine
Function and input Input value
Parameter
MP910.0-2 Software limit switch max. value
Input range:
–9 999.99 to +9 999.99 [mm]
MP920.0-2 Software limit switch min. value
Input range:
–9 999.99 to +9 999.99 [mm]
MP1010.0-5 Rapid traverse for normal and amplified
tachometer signals
Input range: 80 to 30 000 [mm/min]
MP1010.0-2 normal rapid traverse for X, Y, Z
MP1010.3-5 increased rapid trav. for X, Y, Z
MP1030.0-2 Positioning window
Input values: 0.005 to 2.000 [mm]
MP1040 Polarity of nominal value voltage for positive
traversing direction
Input values: 0 to 7
Bit 0 Axis X +0 = positive
+1 = negative
Bit 1 Axis Y +0 = positive
+2 = negative
Bit 2 Axis Z +0 = positive
+4 = negative
MP1050.0-2 Analog voltage for rapid traverse
Input values: 4.5 to 11 [V]
MP1051.0-2 Lower limit of analog voltage
Input values: 0 to 35 [ factor 2.93 mV]
MP1060.0-5 Acceleration
Input values: 0.001 to 3.000 [m/s
2
]
1060.0 to 1060.2: accelerate
1060.3 to 1060.5: decelerate
MP1110 Standstill monitoring
Input values: 0.001 to 30.000 [mm]
MP1140 Motion monitoring
Input values: 0.03 to 10 [V]
MP1320 Traverse direction when crossing over the
reference marks
Input values: 0 to 7
Bit 0 Axis X: + 0 = positive
+ 1 = negative
Bit 1 Axis Y: + 0 = positive
+ 2 = negative
Bit 2 Axis Z: + 0 = positive
+ 4 = negative
If MP70 = 1, then MP1040 must
equal 0.
10 V
4/97 TNC 122 11 Machine Parameters 39
Page 41

Machine
Function and input Input value
Parameter
MP1330.0-2 Feed rate for crossing over the reference marks
Input values: 80 to 30 000 [mm/min]
MP1340.0-2 Sequence of axes for crossing over the
reference marks
Input values: 0 to 3
0 = no reference mark evaluation
1 = Axis X
2 = Axis Y
3 = Axis Z
MP1350.0-2 Type of referencing
Input values: 0 or 1
0 = encoder with distance-coded reference
marks
1 = encoder with one reference mark
MP1720 Position monitoring with servo lag
(EMERGENCY OFF)
Input values: 0 to 200 [mm]
MP1810.0-2 kv factor for operation with servo lag
Input values: 0.1 to 10 [1/min]
MP1820 Multiplication factor for the kv factor
Input values: 0.001 to 9
MP1830 Characteristic kink for the kv factor
Input values: 0 to 100 [%]
MP1850 Factor for internal servo-lag adjustment with
external rapid traverse voltage
Input values: 0 to 65535
Only if MP80 = 1
40 TNC 122 11 Machine Parameters 4/97
Page 42

Machine
Parameter
MP4110 Time for timers T0 to T15
MP4110.0 Waiting time controller enable X
MP4110.1 Waiting time unclamp X start
MP4110.2 Waiting time clamp X stop
MP4110.3 Waiting time controller enable Y
MP4110.4 Waiting time unclamp Y start
MP4110.5 Waiting time clamp Y stop
MP4110.6 Waiting time controller enable Z
MP4110.7 Waiting time unclamp Z start
MP4110.8 Waiting time clamp Z stop
MP4110.9 SE pulse formation / duration
MP4110.10 Waiting time O5 traverse
MP4110.11 Delay time for rapid traverse
MP4110.12
MP4110.13
MP4110.14
MP4110.15
MP4120.0
to
MP4120.7
MP4210 Setting a number in the PLC word range
MP4210.0 X switch-off point for rapid trav.
MP4210.1 Y switch-off point for rapid trav.
MP4210.2 Z switch-off point for rapid trav.
MP4210.3 Position control loop to XYZ potentiometer=0,
MP4210.4 Number of D/A converter steps per PLC cycle
MP4210.5 Multiplication factor for the feed rate
MP4210.6
MP4210.7 Selection of code no. for software level for
MP4210.8
MP4210.9
Function and input Input value
Input values: 0 to 65 535 [24 ms]
direction, delay erosion start M36
output O4 (night erosion switchoff)
Preset value for counters C0 to C7
Input values: 0 to 65 535
D768 to D804
Input values: –9 999.999 to +9 999.999 [mm]
Only with MP 4310.4 and .5 =1
NC stop, lag<0.5
Input approx. 0.4
with control by PLC
Input approx. 0.1 to 1.2
potentiometer
Potentiometer value * MP4210.5= NC % block
position control loop via PLC
External pot. 100%: factor 0.66
External pot. 150%: factor 1.0
Input 1 to 8 (for software level of
TNC 121, see Chapter 10)
4/97 TNC 122 11 Machine Parameters 41
Page 43

Machine
Parameter
MP4220 Setting a number in the PLC word range
MP4220.0 1 = bipolar without SE functions
MP4220.1 0 = Static M output
MP4220.2 0 = M acknowledgment to
MP4220.3 If potentiometer closed, NC stop feed rate
MP4220.4 If potentiometer closed, NC stop feed rate
Function and input Input value
W960 to W968
Input values: 0 to 65535
2 = unipolar without SE functions
5 = bipolar with SE functions
6 = unipolar with SE functions
12 = erosion with SE functions
+1 = M03/M05 impulse or
M16/M17 impulse
+2 = M04/M05 impulse or
M18/M19 impulse
+4 = M08/M09 impulse
+8 = M20/M21 impulse
+16 = M22/M23 impulse
+32 = M24/M25 impulse
+64 = M26/M27 impulse
+128 = M28/M29 impulse
+256 = M32/M33 impulse
I15
+1 = M03 automatic
+2 = M04 automatic
+4 = M8/M9 automatic
+8 = M16/M17 automatic
+16 = M18/M19 automatic
+32 = M20/M21 automatic
+64 = M22/M23 automatic
+128 = M24/M25 automatic
+256 = M26/M27 automatic
+512 = M28/M29 automatic
+1024 = M32/M33 automatic
+2048 = M00/M02/M05/M30
automatic
Minimum potentiometer feed
potentiometer minimum
potentiometer maximum
rate 0%
Active minimum potentiometer
feed rate 0%
A change to the machine parameters MP4220.x only becomes active after a power
interruption.
42 TNC 122 11 Machine Parameters 4/97
Page 44

Machine
Parameter
MP4310 Setting a number in the PLC marker range
MP4310.0 X trav. direction 0=neg., 1=pos.
MP4310.1 Y trav. direction 0=neg., 1=pos.
MP4310.2 Z trav. direction 0=neg., 1=pos.
MP4310.3 Actual and nominal value transfer
MP4310.4 1 = open position control loop
MP4310.5 Only effective if MP 4310.4 is active 1 = no controller enable when
MP4310.6 1 = rapid traverse output O4 set
MP4310.7 1 = M05 output via O11
MP4310.8 0 = EMERGENCY STOP cancels
MP4310.9 Position control loop
MP4310.10 0 = M functions active in MDI
MP4310.11 1= switch off PLC position
MP4310.12 1= rapid traverse information (MP
MP4310.13
MP4310.14
MP4310.15
MP4310.16
MP4310.17
MP4310.18
MP4310.19
Function and input Input value
M2192 to M2211
Input values: 0 or 1
in automated operational mode
0 = no, 1=yes
when override closed or NC stop
override closed or NC stop
in automated operating mode
(M20/M21) and reset via M03,
M04, M13, M14;
M09 output via O10 (M22/M23)
and reset via M08, M13, M14
the SE outputs
1 = EMERGENCY STOP does not
cancel the SE outputs
0 = NC control
1 = PLC control
1 = M functions not active in MDI
control loop monitoring
block) is not switched when the
advance switch point is reached
A change to the machine parameters MP4310.x only becomes active after a power
interruption.
4/97 TNC 122 11 Machine Parameters 43
Page 45

Machine
Parameter
MP7210 *) Programming station or machine control
MP7230 *) Dialog language
MP7285 *) Tool length is included in the position display
MP7290 *) Display step 1 µm or 5 µm
MP7320 Encoder signal amplitude
MP7322 *) Position display mode
MP7680 *) Memory function for axis direction buttons
MP7690 Memory test during switch-on or after reset
Function and input Input value
Input values: 0 to 2
0 = control
1 = programming station, PLC active
2 = programming station, PLC not active
Input: 0 to 7
0 = German
1 = English
2 = French
3 = Dutch
4 = Spanish
5 = reserved
6 = reserved
7 = reserved
value for the tool axis
Input values: 0 or 1
0 = tool length is included
1 = tool length is not included
Input values: 0 or 1
0 = 1µm
1 = 5 µm
Input values: 0 to 7
0 = 16µA encoders
+1 = 40µA encoders on X-axis
+2 = 40µA encoders on Y-axis
+4 = 40µA encoders on Z-axis
Input values: 0 to 3
0 = display actual position
1 = display servo lag
2 = display reference position
3 = display actual feed rate and nominal value
voltage
Input values: 0 or 1
0 = not stored
1 = stored
Input values: 0 to 3
+0 = memory test during switch-on
+1 = no RAM test during switch-on
+2 = no EPROM test during switch-on
44 TNC 122 11 Machine Parameters 4/97
Page 46

12 PLC Description
The TNC 122 features an integrated PLC for 15 inputs and 15 outputs. PLC programs for specific
machine models (see Chapter 10) have been prepared and stored by HEIDENHAIN in the EPROM.
If in rare cases the PLC program must be altered or rewritten, we recommend using the
programming software
, version 2.2 from HEIDENHAIN. This program can also generate the binary
PLC.EXE
code for the PLC EPROM (see the User's Manual for PLC.EXE).
The PLC program assigns fixed functions to the inputs and outputs at the X41 terminal block (see
Chapter 8 "Pin Layout."
In the TNC 122 the PLC program is run directly from the EPROM; there is no RAM memory for this
task.
For servicing purposes the logical status of the markers, inputs, outputs, timers and counters can be
transmitted through the RS-232-C/V.24 port to a computer. Transmission is activated by entering the
code number 807 667 in the TNC 122.
Under menu item "File/TNC 12x Monitor" the program PLC.EXE provides a function (PLCMONI.EXE)
for immediately displaying the logical status of operands, provided that the code number was
entered.
• Use the rightward cursor key on the TNC to scroll through the markers.
• Use the "R+/-" key on the TNC to scroll back through the markers.
• Press the NO ENT key to leave the display.
12.1 PLC EPROM
The PLC EPROM is a 2-MB or 4 MB chip with 16-bit data organization. It is programmed in Motorola
format, which means that the most significant byte of a word is located at the first (lowest) address.
Addresses:
$00000
...
$00400
$00402
$00403
$0000
...
PLC Program start address
Chip identifier (1 word)
PLC program length
$00405 $0000
$00406
...
$0041C
$0041E
10th MP list
...
nd
2
MP list
st
1
MP list
$00420 $0000
$007E0 PLC Program in binary format
and
up to 10 machine parameter tables
$1C000 20 PLC error messages in 7 languages
20 dialogs in 7 languages (30 characters each)
$1FF00 PLC software number
$1FFFC Checksum
$1FFFE One's complement checksum
4/97 TNC 122 12 PLC Description 45
Page 47

The error messages and dialogs are filed in the individual languages in the sequence and syntax
('...',0). Each dialog can have up to 16 characters (see also the User's Manual for PLC.EXE).
German '..............................',0
English '..............................',0
French '..............................',0
12.2 PLC Commands
12.2.1 Load and store commands
LOAD (L)
Logic execution with the LOAD command
Operands: M, I, O, T, C
The addressed operand is copied into the Logic Accumulator. An L command is always used at the
start of a logic chain to enable subsequent gating commands.
Word execution with the LOAD command
Operands: B, W, D, K
The addressed operand (B, W, D) or a Constant (K) is copied or loaded into the Word Accumulator.
The sign is added if necessary. In contrast to logic execution, an L command must always be used
at the start of a word gating chain. It is not possible to use a gating command.
LOAD NOT (LN)
Logic execution with the LOAD NOT command
Operands: M, I, O, T, C
The complement of the addressed operand is loaded into the Logic Accumulator. A load command is
always used at the start of a logic chain to enable subsequent gating commands.
Word execution with the LOAD NOT command
Operands: B, W, D, K
The content of the addressed operands (B, W, D) or a Constant (K) is loaded into the Word
Accumulator as a complement. The sign is added if necessary. In contrast to logic execution, a load
command must always be used at the start of a word gating chain. It is not possible to use a gating
command.
LOAD TWO'S COMPLEMENT (L–)
Operands: B, W, D, K
The contents of the addressed operand (B, W, D) or a Constant (K) is loaded into the Word
Accumulator as a two's complement. The sign is added if necessary. The two's complement allows
negative numbers to be stored, i.e. if a number is loaded with L–, it appears in the Accumulator with
the opposite sign. This command can only be used with Word execution.
46 TNC 122 12 PLC Description 4/97
Page 48

LOAD BYTE (LB)
Operands: M, I, O, T, C
The LB command copies 8 Markers, Inputs, Outputs, Timers or Counters with ascending numbering
into the Word Accumulator. Each operand occupies 1 bit in the Accumulator. The designated
operand address occupies the LSB in the Accumulator, the designated address + 1 the LSB + 1 and
so on. In this way, the last affected operand occupies the MSB. The sign is added if necessary.
LOAD WORD (LW)
Operands: M, I, O, T, C
The LW command copies 16 Markers, Inputs, Outputs, Timers or Counters with ascending
numbering into the Word Accumulator. Each operand occupies 1 bit in the Accumulator. The
designated operand address occupies the LSB in the Accumulator, the designated address + 1 the
LSB + 1 and so on. In this way, the last affected operand occupies the MSB The sign is added if
necessary.
LOAD DOUBLEWORD (LD)
Operands: M, I, O, T, C
The LD command copies 32 Markers, Inputs, Outputs, Timers or Counters with ascending
numbering into the Word Accumulator. Each operand occupies 1 bit in the Accumulator. The
designated operand address occupies the LSB in the Accumulator, the designated address + 1 the
LSB + 1 and so on. In this way, the last affected operand occupies the MSB.
ASSIGN (=)
Logic execution with the ASSIGN command
Operands: M, I, O, T, C
In conjunction with a Logic Operand (M, I, O, T, C), ASSIGN copies the contents of the Logic
Accumulator into the addressed operand. ASSIGN is only used at the end of a logic chain to ensure
that a gating result is available. The command can be used several times in succession.
Word execution with the ASSIGN command
Operands: B, W, D
ASSIGN in conjunction with a Word Operand (B, W, D) copies the contents of the Word
Accumulator into the addressed operand. In contrast to bit execution, ASSIGN can also be used
within a word logic chain. The command can be used several times in succession.
4/97 TNC 122 12 PLC Description 47
Page 49

ASSIGN BYTE (B=)
Operands: M, I, O, T, C
ASSIGN BYTE copies 8 bits from the Word Accumulator to Markers, Inputs, Outputs, Timers or
Counters with ascending numbering. Each bit corresponds to one operand. The LSB in the
Accumulator is copied to the designated operand address, the LSB + 1 to the designated address
+ 1 and so on. The last affected operand is occupied by the MSB.
ASSIGN WORD (W=)
Operands: M, I, O, T, C
ASSIGN WORD copies 16 bits from the Word Accumulator to Markers, Inputs, Outputs, Timers or
Counters with ascending numbering. Each bit corresponds to one operand. The LSB in the
Accumulator is copied to the designated operand address, the LSB + 1 to the designated address
+ 1 and so on. The last affected operand is occupied by the MSB.
ASSIGN DOUBLEWORD (D=)
Operands: M, I, O, T, C
ASSIGN DOUBLEWORD copies 32 bits from the Word Accumulator to Markers, Inputs, Outputs,
Timers or Counters with ascending numbering. Each bit corresponds to one operand. The LSB in
the Accumulator is copied to the designated operand address, the LSB + 1 to the designated
address + 1 and so on. The last affected operand is occupied by the MSB.
ASSIGN NOT (=N)
Logic execution
Operands: M, I, O, T, C
In conjunction with a logic operand (M, I, O, T, C), ASSIGN NOT copies the complement of the
contents of the Logic Accumulator into the addressed operand. See ASSIGN (=) for the sequence of
operations.
Word execution
Operands: B, W, D
In conjunction with a word operand (B, W, D), ASSIGN NOT copies the complement of the contents
of the Word Accumulator into the addressed operand.
ASSIGN TWO'S COMPLEMENT (=-)
Operands: B, W, D
ASSIGN TWO'S COMPLEMENT copies the TWO'S COMPLEMENT of the contents of the Word
Accumulator into the addressed operand.
48 TNC 122 12 PLC Description 4/97
Page 50

12.2.2 Set commands
SET (S)
Operands: M, I, O, T, C
The function of this command depends on the contents of the Logic Accumulator. If the Logic
Accumulator = 1, the addressed operand is set to 1; otherwise the operand remains unchanged. An
S command is used at the end of a logic chain so that the gating result influences the operand. The
command can be used several times in succession.
RESET (R)
Operands: M, I, O, T, C
The function of this command depends on the contents of the Logic Accumulator. If the Logic
Accumulator = 1, the addressed operand is set to 0; otherwise the operand remains unchanged. An
R command is used at the end of a logic chain so that the gating result influences the operand. The
command can be used several times in succession.
SET NOT (SN)
Operands: M, I, O, T, C
The function of this command depends on the contents of the Logic Accumulator. If the Logic
Accumulator = 0, then the addressed operand is set to 1; otherwise the operand remains
unchanged. An SN command is used at the end of a logic chain so that the gating result influences
the operand. The command can be used several times in succession.
RESET NOT (RN)
Operands: M, I, O, T, C
The function of this command depends on the contents of the Logic Accumulator. If the Logic
Accumulator = 0, then the addressed operand is set to 0; otherwise the operand remains
unchanged. An RN command is used at the end of a logic chain so that the gating result influences
the operand. The command can be used several times in succession
4/97 TNC 122 12 PLC Description 49
Page 51

12.2.3 Logical Connective Operations
AND (A)
Logic execution with the AND command
Operands: M, I, O, T, C
This command functions in different ways depending on its position in the program:
a) At the start of a logic chain the command functions as an L command. That is, the logic state of
the operand is loaded into the Logic Accumulator.
b) Within a logic chain the contents of the Logic Accumulator and the logic state of the operand
(M, I, O, T, C) are gated with AND. The result of the operation is stored in the Logic Accumulator.
Word execution with the AND Command
Operands: B, W, D, K
The contents of the Word Accumulator and the contents of the operand (B, W, D, K) are gated with
AND. In accordance with the different sizes of operand (B = 8 bits; W = 16 bits; D = K = 32 bits),
8, 16 or 32 bits will be influenced in the Accumulator.
Thus: Bit 0 of the Accumulator is gated with bit 0 of the operand
Bit 1 of the Accumulator is gated with bit 1 of the operand, and so on.
AND NOT (AN)
Logic execution with the AND NOT command
Operands: M, I, O, T, C
This command functions in different ways depending on its position in the program:
a) At the start of a logic chain the command functions as an LN command. That is, the complement
of the operand is loaded into the Logic Accumulator.
b) Within a logic chain, the contents of the Logic Accumulator and the logic state of the operand
(M, I, O, T, C) are gated with AND NOT. The result of the operation is stored in the Logic
Accumulator.
Word execution with the AND NOT command
Operands: B, W, D, K
The contents of the Word Accumulator and the contents of the operand (B, W, D, K) are gated with
AND NOT. In accordance with the different sizes of operand (B = 8 bits; W = 16 bits;
D = K = 32 bits), 8, 16 or 32 bits will be influenced in the Accumulator.
Thus: Bit 0 of the Accumulator is gated with bit 0 of the operand
Bit 1 of the Accumulator is gated with bit 1 of the operand, and so on.
The result of the operation is stored in the Word Accumulator.
50 TNC 122 12 PLC Description 4/97
Page 52

OR (O)
Logic execution with the OR command
Operands: M, I, O, T, C
This command functions in different ways depending on its position in the program:
a) At the start of a logic chain the command functions as an L command. That is. the logic state of
the operand is loaded into the Logic Accumulator.
b) Within a logic chain, the contents of the Logic Accumulator and the logic state of the operand
(M, I, O, T, C) are gated with OR. The result of the operation is stored in the Logic Accumulator.
Word execution with the OR command
Operands: B, W, D, K
The contents of the Word Accumulator and the contents of the operand (B, W, D, K) are gated with
OR. In accordance with the different sizes of operand (B = 8 bits; W = 16 bits; D = K = 32 bits),
8, 16 or 32 bits will be influenced in the Accumulator.
Thus: Bit 0 of the Accumulator is gated with bit 0 of the operand
Bit 1 of the Accumulator is gated with bit 1 of the operand, and so on.
The result of the operation is stored in the Word Accumulator.
OR NOT (ON)
Logic execution with the OR NOT command
Operands: M, I, O, T, C
This command functions in different ways depending on its position in the program:
a) At the start of a logic chain this command functions as an LN command. That is, the
complement of the operand is loaded into the Logic Accumulator.
b) Within a logic chain, the contents of the Logic Accumulator and the logic state of the operand
(M, I, O, T, C) are gated with OR NOT. The result of the operation is stored in the Logic
Accumulator.
Word execution with the OR NOT command
Operands: B, W, D, K
The contents of the Word Accumulator and the contents of the operand (B, W, D, K) are gated with
OR NOT. In accordance with the different sizes of operand (B = 8 bits; W = 16 bits; D = K = 32 bits),
8, 16 or 32 bits will be influenced in the Accumulator.
Thus: Bit 0 of the Accumulator is gated with bit 0 of the operand
Bit 1 of the Accumulator is gated with bit 1 of the operand, and so on.
The result of the operation is stored in the Word Accumulator.
EXCLUSIVE OR (XO)
Logic execution with the EXCLUSIVE OR command
Operands: M, I, O, T, C
This command functions in different ways depending on its position in the program:
a) At the start of a logic chain the command functions as an L command. That is, the logic state of
the operand is loaded into the Logic Accumulator.
b) Within a logic chain the contents of the Logic Accumulator and the logic state of the operand (M,
I, O, T, C) are gated with EXCLUSIVE OR. The result of the operation is stored in the Logic
Accumulator.
4/97 TNC 122 12 PLC Description 51
Page 53

Word execution with the EXCLUSIVE OR command
Operands: B, W, D, K
The contents of the Word Accumulator and the contents of the operand (B, W, D, K) are gated with
EXCLUSIVE OR. In accordance with the different sizes of operand (B = 8 bits; W = 16 bits;
D = K = 32 bits), 8, 16 or 32 bits will be influenced in the Accumulator.
Thus: Bit 0 of the Accumulator is gated with bit 0 of the operand
Bit 1 of the Accumulator is gated with bit 1 of the operand, and so on.
The result of the operation is stored in the Word Accumulator.
EXCLUSIVE OR NOT (XON)
Logic execution with the EXCLUSIVE OR NOT command
Operands: M, I, O, T, C
This command functions in different ways depending on its position in the program:
a) At the start of a logic chain this command functions as a LN command. That is, the complement
of the operand is loaded into the Logic Accumulator.
b) Within a logic chain the contents of the Logic Accumulator and the logic state of the operand (M,
I, O, T, C) are gated with EXCLUSIVE OR NOT. The result of the operation is stored in the Logic
Accumulator.
Word execution with the EXCLUSIVE OR NOT command
Operands: B, W, D, K
The contents of the Word Accumulator and the contents of the operand (B, W, D, K) are gated with
EXCLUSIVE OR NOT. In accordance with the different sizes of operand (B = 8 bits; W = 16 bits; D =
K = 32 bits), 8, 16 or 32 bits will be influenced in the Accumulator.
Thus: Bit 0 of the Accumulator is gated with bit 0 of the operand
Bit 1 of the Accumulator is gated with bit 1 of the operand, and so on.
The result of the operation is stored in the Word Accumulator.
12.2.4 Arithmetic Commands
ADDITION (+)
Operands: B, W, D, K
With arithmetic functions the operand is first expanded to the size of the Accumulator (32 bits). Then
the contents of the operand are added to the Word Accumulator. The result of the operation is
stored in the Word Accumulator and can be processed further.
SUBTRACTION (–)
Operands: B, W, D, K
With arithmetic functions the operand is first expanded to the size of the Accumulator (32 bits). Then
the contents of the operand are subtracted from the contents of the Word Accumulator. The result
of the operation is stored in the Word Accumulator and can be processed further.
52 TNC 122 12 PLC Description 4/97
Page 54

MULTIPLICATION (x)
Operands: B, W, D, K
With arithmetic functions the operand is first expanded to the size of the Accumulator (32 bits). Then
the contents of the operand are multiplied with the contents of the Word Accumulator. The result of
the operation is stored in the Word Accumulator and can be processed further. If the result of
multiplication causes an overflow, Marker M3168 is set; otherwise it is reset.
DIVISION (/)
Operands: B, W, D, K
With arithmetic functions the operand is first expanded to the size of the Accumulator (32 bits). Then
the contents of the Word Accumulator are divided by the contents of the operand. The result of the
operation is stored in the Word Accumulator and can be processed further. If division by 0 is
attempted, the Marker M3169 is set; otherwise it is reset.
REMAINDER (MOD) D
Operands: B, W, D, K
With arithmetic functions the operand is firstly expanded to the size of the Accumulator (32 bits).
Then the REMAINDER is determined by dividing the contents of the Word Accumulator by the
contents of the operand. The REMAINDER is stored in the Word Accumulator and can be processed
further. If the MOD command is not correctly executed then the Marker M3170 is set; otherwise it
is reset.
INCREMENT (INC, INCW)
INCREMENT operand (INC)
Operands: B, W, D
The content of the addressed operand is increased by one.
INCREMENT Word Accumulator (INCW)
The content of the Word Accumulator is increased by one.
DECREMENT (DEC, DECW)
DECREMENT operand (DEC)
Operands: B, W, D
The content of the addressed operand is decreased by one.
DECREMENT Word Accumulator (DECW)
The content of the Word Accumulator is decreased by one.
4/97 TNC 122 12 PLC Description 53
Page 55

12.2.5 Comparisons
EQUAL TO (==)
Operands: B, W, D, K
With this command a direct transfer from Word to Logic processing occurs. The content of the
Word Accumulator is compared with the content of the addressed operand. If the Word
Accumulator is equal to the operand, the condition is true and the Logic Accumulator is set to 1. If
they are not equal, the Logic Accumulator is set to 0. The comparison takes place over the number
of bits corresponding to the operand, i.e. B = 8 bits, W = 16 bits and D = K = 32 bits.
LESS THAN (<)
Operands: B, W, D, K
With this command, a direct transfer from Word to Logic processing occurs. The content of the
Word Accumulator is compared with the content of the addressed operand. If the Word
Accumulator is smaller than the operand, the condition is true and the Logic Accumulator is set to 1.
If the Word Accumulator is greater than or equal to the operand, the Logic Accumulator is set to 0.
The comparison takes place over the number of bits in the operand, i.e. B = 8 bits, W = 16 bits and
D = K = 32 bits.
GREATER THAN (>)
Operands: B, W, D, K
With this command, a direct transfer from Word to Logic processing occurs. . The content of the
Word Accumulator is compared with the content of the addressed operand. . If the Word
Accumulator is greater than the operand, the condition is true and the Logic Accumulator is set to 1.
If the Word Accumulator is less than or equal to the operand, the Logic Accumulator is set to 0. The
comparison takes place over the number of bits in the operand, i.e. B = 8 bits, W = 16 bits and D =
K = 32 bits.
LESS THAN OR EQUAL TO (<=)
Operands: B, W, D, K
With this command, a direct transfer from Word to Logic processing occurs. The content of the
Word Accumulator is compared with the content of the addressed operand. If the Word
Accumulator is less than or equal to the operand, the condition is true and the Logic Accumulator is
set to 1. If the Word Accumulator is greater than the operand, the Logic Accumulator is set to 0. The
comparison takes place over the number of bits in the operand i.e. B = 8 bits, W = 16 bits and D = K
= 32 bits.
GREATER THAN OR EQUAL TO (>=)
Operands: B, W, D, K
With this command, a direct transfer from Word to Logic execution occurs. The content of the Word
Accumulator is compared with the content of the addressed operand. If the Word Accumulator is
greater than or equal to the operand, the condition is true and the Logic Accumulator is set to 1. If
the Word Accumulator is smaller than the operand, the Logic Accumulator is set to 0. The
comparison takes place over the number of bits corresponding to the operand, i.e. B = 8 bits,
W = 16 bits and D = K = 32 bits.
54 TNC 122 12 PLC Description 4/97
Page 56

UNEQUAL (<>)
Operands: B, W, D, K
With this command, a direct transfer from Word to Logic execution occurs. The content of the Word
Accumulator is compared with the content of the addressed operand. If the Word Accumulator and
the operand are not equal, the condition is true and the Logic Accumulator is set to 1. If the Word
Accumulator is equal to the operand, the Logic Accumulator is set to 0. The comparison takes place
over the number of bits corresponding to the operand, i.e. B = 8 bits, W = 16 bits and D = K = 32
bits.
12.2.6 Parenthetical Expressions
Parentheses with logical commands
The execution sequence in an instruction list can be altered by using parentheses. The openparentheses command loads the contents of the Accumulator onto the Program Stack. If the Logic
Accumulator is addressed in the last command before an open-parentheses instruction, the content
of the Logic Accumulator is loaded into the Program Stack. By addressing the Word Accumulator,
the content of the Word Accumulator will be distributed.
The close-parentheses instruction initiates the gating of the buffered value from the Program Stack
with the Logic Accumulator and/or the Word Accumulator, depending on which Accumulator was
addressed before the open-parentheses instruction. The result is then available in the corresponding
Accumulator. The maximum nesting level is 16 parentheses.
AND [ ] (A[ ])
AND NOT [ ] (AN[ ])
OR [ ] (O[ ])
OR NOT [ ] (ON[ ])
EXCLUSIVE OR [ ] (XO[ ])
EXCLUSIVE OR NOT [ ] (XON[ ])
Parentheses with arithmetic commands
With arithmetic commands, only word execution is possible. The execution sequence in an
instruction list may be altered by using parentheses. The open-parentheses command loads the
content of the Word Accumulator onto the Program Stack. The Accumulator is then available for the
calculation of intermediate results. The close-parentheses instruction initiates the gating of the
buffered value from the Program Stack with the content of the Word Accumulator. The result is
again loaded into the Accumulator. The maximum nesting level is 16 parentheses.
ADDITION [ ] (+[ ])
SUBTRACTION [ ] (–[ ])
MULTIPLICATION [ ] (x[ ])
DIVISION [ ] (/[ ])
REMAINDER [ ] (MOD[ ])
4/97 TNC 122 12 PLC Description 55
Page 57

Parentheses with comparison commands
The execution sequence in an instruction list can be altered by using parentheses. The openparentheses command loads the contents of the Word Accumulator onto the Program Stack. The
Accumulator is now available for the calculation of intermediate results.
The "close-parentheses" instruction initiates the gating of the buffered value from the Program Stack
with the content of the complete Word Accumulator. The result is again loaded into the
Accumulator. The maximum nesting depth is 16 parentheses.
A direct transition from Word to Logic execution takes place with comparison commands. If the
comparison condition is true, the Logic Accumulator is set to 1. If the condition is not true, the Logic
Accumulator is set to 0.
EQUAL TO [ ] (==[ ])
LESS THAN [ ] (<[ ])
GREATER THAN [ ] (>[ ])
LESS THAN OR EQUAL TO [ ] (<=[ ])
GREATER THAN OR EQUAL TO [ ] (>=[ ])
UNEQUAL [ ] (<>[ ])
12.2.7 Shift Commands
SHIFT LEFT (<<)
Operands: B, W, D, K
Since the sign bit (MSB) is included with this command, it is grouped in with arithmetic commands.
For this reason and out of time considerations, this command should not be used for the isolation of
bits. A SHIFT LEFT instruction causes the contents of the Word Accumulator to be multiplied by
two. For this purpose the bits in the Accumulator are simply shifted one place to the left. The result
must be within the range of –2 147 483 648 to +2 147 483 647, otherwise the Accumulator will
contain an undefined value. The number of shift operations is determined by the operand; the right
side of the Accumulator is filled with zeros.
SHIFT RIGHT (>>)
Operands: B, W, D, K
Since the sign bit (MSB) is included with this command, it is grouped in with arithmetic commands.
For this reason and out of time considerations, this command should not be used for the isolation
of bits. A SHIFT RIGHT instruction causes the contents of the Word Accumulator to be divided by
two. For this purpose the bits in the Accumulator are simply shifted one place to the right. The
number of shift operations is determined by the operand. The set bits, which are shifted beyond
the Accumulator to the right, are lost; the Accumulator is filled from the left-hand side including
the sign.
56 TNC 122 12 PLC Description 4/97
Page 58

12.2.8 Bit Commands
BIT SET (BS)
Operands: B, W, D, K
With this command, each bit in the Accumulator can be accessed. The BS command sets the
addressed bit to 1. The selection (addressing) of the corresponding bit is derived from the content of
the specified Operand or a Constant. In the bit-numbering, bit 0 corresponds to the LSB and bit 31
corresponds to the MSB. For operand contents larger than 32, the operand value Modulo 32 is
used — that is, the integer remainder from the division (operand value)/32.
BIT CLEAR (BC)
Operands: B, W, D, K
With this command, each bit in the Accumulator can be accessed. The BC command sets the
addressed bit to 0. The selection (addressing) of the corresponding bit is derived from the content of
the specified Operand or a Constant. In the bit-numbering, bit 0 corresponds to the LSB and bit 31
corresponds to the MSB. For operand contents larger than 32, the operand value Modulo 32 is
used — that is, the integer remainder from the division (operand value)/32.
BIT TEST (BT)
Operands: B, W, D, K
With this command, the status of each bit in the Accumulator can be interrogated. With BT
commands, a direct transition from Word to Logic execution takes place. The BIT TEST tests the
status of a bit from the Word Accumulator and then acts correspondingly on the Logic Accumulator.
If the tested bit is 1, the Logic Accumulator is set to 1; if it is 0, the Logic Accumulator is set to 0.
The program continues in logic execution. The selection (addressing) of the corresponding bit is
derived from the content of the specified Operand or a Constant. In the bit numbering, bit 0
corresponds to the LSB and bit 31 corresponds to the MSB. For operand contents larger than 32,
the operand value Modulo 32 is used — that is, the integer remainder from the division (operand
value)/32.
12.2.9 Stack Operations
Load Data onto the Data Stack (PS)
Logic Execution with the PS Command
Operands: M, I, O, T, C
With the PS command, data is buffered by loading the addressed operand onto the Data Stack.
Since the Data Stack is 16-bit, a minimum width of one Word must be used when writing to it.
During this the operand value is copied into bit 7 of the current address in the Data Stack. The free
bits of the reserved memory are undefined or unused. If there is a stack overflow, an error message
will be issued.
4/97 TNC 122 12 PLC Description 57
Page 59

Word execution with the PS command
Operands: B, W, D, K
With the PS command data is buffered by copying the addressed memory area (B, W, D, K) into the
current address of the Data Stack. With Word execution, two Words are reserved as standard on
the Data Stack per PS command. The operand is extended in the Stack with sign justification
corresponding to the MSB. If there is a stack overflow, an error message will be issued.
Load Logic Accumulator onto the Data Stack (PSL)
The Logic Accumulator can be buffered with the PSL command. For this purpose, the Logic
Accumulator is loaded onto the Data Stack. Since the Data Stack is 16-bit, it must be written to with
a minimum width of one Word. During this the content of the Logic Accumulator is copied into the
current address of the Data Stack. The free bits of the reserved memory are undefined or unused. If
there is a stack overflow, an error message will be issued.
Load Word Accumulator onto the Data Stack (PSW)
The content of the Word Accumulator can be buffered with the PSW command. For this purpose,
the Word Accumulator is copied into the Data Stack. The content of the Word Accumulator (32 bits)
reserves two Words on the Data Stack. If there is a stack overflow, an error message results.
Acquire data from the Data Stack (PL)
Logic execution with the PL command
Operands: M, I, O, T, C
The PL command complements the PS command. Data that have been saved with PUSH can be
taken from the Data Stack again with PULL. With logic execution, bit 7 is copied from the current
address of the Data Stack into the addressed operand with a PL command. If the Stack is empty, an
error message will be issued.
Word execution with the PL command
Operands: B, W, D
The PL command complements the PS command. Data that have been saved with PUSH can be
taken from the Data Stack again with PULL. With Word execution, two Words are copied from the
current address of the Data Stack into the addressed memory area with a PL command. If the Stack
is empty, an error message will be issued.
Acquire Logic Accumulator from the Data Stack (PLL)
The PLL command complements the PSL command. With a PLL instruction, bit 7 from the current
address of the Data Stack is copied into the Logic Accumulator. If the stack is empty, an error
message will be issued.
Acquire Word Accumulator from the Data Stack (PLW)
The PLW command complements the PSW command. With a PLW instruction, two Words are
copied from the Data Stack into the Word Accumulator. If the stack is empty, an error message will
be issued.
58 TNC 122 12 PLC Description 4/97
Page 60

12.2.10 Jump Commands
Unconditional jump (JP)
Operands: jump address (LBL)
The JP command instructs the processor to continue the program at the specified jump address
(Label). This command interrupts a logic sequence.
Jump if Logic Accumulator = 1 (JPT)
Operands: jump address (LBL)
The JPT command is a conditional jump command. If the Logic Accumulator is 1, the program is
continued from the specified jump address (Label). If the Logic Accumulator is 0, the jump is not
processed. This command interrupts a logic sequence.
Jump if Logic Accumulator = 0 (JPF)
Operands: jump address (LBL)
The JPF command is a conditional jump command. If the Logic Accumulator is 0, the program is
continued from the specified jump address (Label). If the Logic Accumulator is 1, the jump is not
processed. This command interrupts a logic sequence.
Call Module (CM)
Operands: jump address (LBL)
CM instructs the processor to leave the main program and process the Module designated by the
jump address (LBL). Modules are independent subprograms and are terminated by the EM
command. They can also be called at multiple points in the main program. This command interrupts
a logic sequence.
Call Module if Logic Accumulator = 1 (CMT)
Operands: jump address (LBL)
The CMT command is a conditional module call. If the Logic Accumulator is 1, the Module with the
specified jump address (Label) is processed. If the Logic Accumulator is 0, the main program
continues without a module call. This command interrupts a logic sequence.
Call Module if Logic Accumulator = 0 (CMF)
Operands: jump address (LBL)
The CMF command is a conditional module call. If the Logic Accumulator is 0, the Module with the
specified jump address (Label) is processed. If the Logic Accumulator is 1, the main program
continues without a module call. This command interrupts a logic sequence.
4/97 TNC 122 12 PLC Description 59
Page 61

End of Module, End of Program (EM)EM
Every program and/or every subprogram (Module) is terminated with an EM command. EM in a
Module initiates the return jump to the Call Module (CM, CMT, CMF). The program is continued with
the instruction following the Call Module. EM is handled as program end criterion; thus subsequent
program instructions can only be reached using a jump address.
End of Module if Logic Accumulator = 1 (EMT)
The EMT command only initiates the return jump to the Call Module (CM, CMT, CMF) if the Logic
Accumulator is 1.
End of Module if Logic Accumulator = 0 (EMF)
The EMF command only initiates the return jump to the Call Module (CM, CMT, CMF) if the Logic
Accumulator is 0.
Jump Label (LBL)
Operands: ASCII name (with up to 32 characters)
The jump label defines a program position as an entry point for the CM and JP commands. Up to
1000 jump labels per file can be defined.
The ASCII name of the jump label can be up to 32 characters long, although only the first 16
characters are used to differentiate between jump labels.
12.3 Classes of Markers and Bytes
Marker Application
M1000 to M1999 To be assigned as desired. Settings erased after power interruption
(Reset).
M0 to M999 To be assigned as desired. Settings erased after power interruption
(Reset).
M2000 to B3000 Reserved for NC-to-PLC interface.
Byte Application
B0 to B127 To be assigned as desired. Settings erased after power interruption
(Reset).
B128 to B255 To be assigned as desired. Settings erased after power interruption
(Reset).
B256 to B1023 Reserved for NC-to-PLC interface.
60 TNC 122 12 PLC Description 4/97
Page 62

12.4 Marker List
Marker Function Set Reset
M0000
to
M1499
M1500 Rising edge I0 if M2497 set NC NC
M1501 Rising edge I1 if M2497 set NC NC
M1502 Rising edge I2 if M2497 set NC NC
M1503 Rising edge I3 if M2497 set NC NC
M1504 Rising edge I4 if M2497 set NC NC
M1505 Rising edge I5 if M2497 set NC NC
M1506 Rising edge I6 if M2497 set NC NC
M1507 Rising edge I7 if M2497 set NC NC
M1508 Rising edge I8 if M2497 set NC NC
M1509 Rising edge I9 if M2497 set NC NC
M1510 Rising edge I10 if M2497 set NC NC
M1511 Rising edge I11 if M2497 set NC NC
M1512 Rising edge I12 if M2497 set NC NC
M1513 Rising edge I13 if M2497 set NC NC
M1514 Rising edge I14 if M2497 set NC NC
M1515 Rising edge I15 if M2497 set NC NC
M1700 Falling edge I0 if M2497 set NC NC
M1701 Falling edge I1 if M2497 set NC NC
M1702 Falling edge I2 if M2497 set NC NC
M1703 Falling edge I3 if M2497 set NC NC
M1704 Falling edge I4 if M2497 set NC NC
M1705 Falling edge I5 if M2497 set NC NC
M1706 Falling edge I6 if M2497 set NC NC
M1707 Falling edge I7 if M2497 set NC NC
M1708 Falling edge I8 if M2497 set NC NC
M1709 Falling edge I9 if M2497 set NC NC
M1710 Falling edge I10 if M2497 set NC NC
M1711 Falling edge I11 if M2497 set NC NC
M1712 Falling edge I12 if M2497 set NC NC
M1713 Falling edge I13 if M2497 set NC NC
M1714 Falling edge I14 if M2497 set NC NC
M1715 Falling edge I15 if M2497 set NC NC
M2008 Axis X in position NC NC
To be assigned as desired PLC PLC
4/97 TNC 122 12 PLC Description 61
Page 63

Marker Function Set Reset
M2009 Axis Y in position NC NC
M2010 Axis Z in position NC NC
M2045 Strobe signal M Code NC NC
M2050 Operating mode: Programming and Editing NC NC
M2051 Operating mode: Manual NC NC
M2054 Operating mode: Single block NC NC
M2055 Operating mode: Automatic NC NC
M2057 Operating mode: Cross over reference marks NC NC
M2072 M code bit 1 NC NC
M2073 M code bit 2 NC NC
M2074 M code bit 3 NC NC
M2075 M code bit 4 NC NC
M2076 M code bit 5 NC NC
M2077 M code bit 6 NC NC
M2078 M code bit 7 NC NC
M2079 M code bit 8 NC NC
M2160 Traversing direction (0 = positive, 1 = negative) NC NC
M2176 Code operating mode (lsb) NC NC
M2177 Code operating mode NC NC
M2178 Code operating mode NC NC
M2179 Code operating mode (msb) NC NC
M2180 1st PLC scan after power on NC NC
M2183 Program interruption (control-in-operation symbol is blinking) NC NC
M2184 Control in operation (control-in-operation symbol is on or
blinking)
M2185 1st PLC scan after an interruption of the PLC program NC NC
M2190 Non-blinking error message is displayed NC NC
M2191 EMERGENCY STOP error message is displayed NC NC
M2192
to
M2211
Can be set by MP4310.0 to MP 4310.19 NC NC
NC NC
M2448 NC start PLC PLC
M2449 Rapid traverse PLC PLC
M2450 Memory function for axis direction keys PLC PLC
M2451 Feed rate enable PLC PLC
M2456 Manual traverse X+ PLC PLC
M2457 Manual traverse X– PLC PLC
M2458 Manual traverse Y+ PLC PLC
62 TNC 122 12 PLC Description 4/97
Page 64

Marker Function Set Reset
M2459 Manual traverse Y- PLC PLC
M2460 Manual traverse Z+ PLC PLC
M2461 Manual traverse Z- PLC PLC
M2464 Complement of NC-Start PLC PLC
M2465 Complement of rapid traverse PLC PLC
M2466 Complement of memory function for axis direction keys PLC PLC
M2467 Complement of feed rate enable PLC PLC
M2472 Complement of manual traverse X+ PLC PLC
M2473 Complement of manual traverse X– PLC PLC
M2474 Complement of manual traverse Y+ PLC PLC
M2475 Complement of manual traverse Y– PLC PLC
M2476 Complement of manual traverse Z+ PLC PLC
M2477 Complement of manual traverse Z– PLC PLC
M2482 Acknowledgment of M code PLC PLC
M2488 NC stop (0 = stop) PLC PLC
M2497 Activate the edge evaluation for PLC inputs
PLC PLC
Rising edges: Markers M1500 to M1659
Falling edges: Markers M1700 to M1859
M2544 Open the control loop for axis X PLC PLC
M2545 Open the control loop for axis Y PLC PLC
M2546 Open the control loop for axis Z PLC PLC
M2552 Actual and nominal value transfer in axis X PLC PLC
M2553 Actual and nominal value transfer in axis Y PLC PLC
M2554 Actual and nominal value transfer in axis Z PLC PLC
M2556 Reference end position for axis X PLC PLC
M2557 Reference end position for axis Y PLC PLC
M2558 Reference end position for axis Z PLC PLC
M2624 Limit switch X+ NC NC
M2625 Limit switch X– NC NC
M2626 Limit switch Y+ NC NC
M2627 Limit switch Y– NC NC
M2628 Limit switch Z+ NC NC
M2629 Limit switch Z– NC NC
M2924
to
Error messages and dialogs PLC NC;
PLC
M2963
4/97 TNC 122 12 PLC Description 63
Page 65

Word addresses
Word Function
D288 to
Actual values in the X, Y and Z axes
D296
D300 to
Nominal values in the X, Y and Z axes
D308
D312 to
Reference values in the X, Y and Z axes
D320
D324 to
Servo lag in the X, Y and Z axes
D332
D360 Current feed rate in mm/min
D364 Maximum feed rate in mm/min
D768 to
Values from MP4210.0 to MP4210.9 (deceleration signal)
D804
W969 to
Values from MP4310.0 to MP4310.4
W968
W766 % factor for feed rate override
64 TNC 122 12 PLC Description 4/97
Page 66

13 Error Messages
PROCESSOR CHECK X
ENCODER <AXIS> DEFECT X
POS. ERROR X <AXIS>
X ⇒
X ⇒
X ⇒
0 = Checksum NC-EPROM incorrect
1 = CRC sum MP incorrect
2 = CRC sum NC memory incorrect
4 = Cross feed between data bits in the RAM
5 = Checksum PLC-EPROM incorrect
6 = Stack overflow
7 = Timeout EEPROM
A = Software error
B = Incorrect interrupt
C = Overflow time slice
A = Signal amplitude too low
B = Frequency exceeded
A = Servo lag monitoring
C = Movement monitoring
D = Standstill monitoring
4/97 TNC 122 13 Error Messages 65
Page 67

14 Dimensions
6±0.2
.236"±008"
6±0.2
.236"±008"
Ø5.5
DIA .22"
X
281
11.06"
269±0.2
10.59"±.008"
205
8.07"
133+3
5.24"+.12"
193±0.2
7.598"±.008"
Y
Z
MOD
PGM
STOP
LBL
SPEC
FCT
7 8 9
X
Y
4 5 6
NO
Z
–
+
R
/–
1 2 3
0
ENT
ENT
DEL
F
CL
TOOL
DEF
HEIDENHAIN
83+3
3.27"+.12"
4
1
.16"
.04"
10
DIA.4"
Frontplattenausschnitt 259+0.5 x198.5+0.5
front panel opening 10.2"+.02" x 7.82"+.02"
66 TNC 122 14 Dimensions 4/97
Page 68

PGM
XXXX
257
10.12"
12–0.5
.47"–.02"
4–0.5
0
X1
45
1.77"
.16"–.02"
L1
X51
X2
X3
12
N
B
3 4 5 6 7 8 9 101112 1314 15161718192021222324
25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 434445 46 47 48
X41(EXT)
X21
75
2.95"
105
4.13"
152
5.98"
197+1
7.67"+.04"
4/97 TNC 122 14 Dimensions 67
Page 69

V.24–Adapter
7
.28"
38
57
1.5"
2.24"
78±0.2
3.071±.008"
R 40
R 1.57"
92
3.62"
M4
M 5
78±0.2
3.071±.008"
60+1
2.36+.04"
21+0.5
.83"+.02"
5
.2"
3
.12"
68 TNC 122 14 Dimensions 4/97
Page 70

15 Subject Index
Acceleration during approach 26
Analog voltage, bipolar/unipolar 26
Analog voltage, lower limit 26
Axis positions 29
Bottom voltage 24
Byte, classes 60
Characteristic kink 27
Commissioning the TNC 122 37
Connections 10
Control-is-ready acknowledgment 33
Control-is-ready output 33
Controller input 25
Counting direction 17
Data interface 15
Data interface X21 11
Datum setting 18
Dialog language 31
Dimensions 66
Display step 31
EMERG STOP DEFEC 35
EMERGENCY STOP 35
EMERGENCY STOP circuit 33
EMERGENCY STOP connection diagram 34
EMERGENCY STOP flowchart 35
Encoder inputs, assignments of 17
Encoder monitoring 30
Encoders 16
Encoders, old models 16
EPROM sockets 7
Error message AMPL.TOO SMALL 30
Error message EMERGENCY STOP 33
Error message ENCODER DEFECT 30
Error message OVERLOAD 30
Error message POS. ERROR A 29
Error message POS. ERROR C 29
Error message POS.ERROR D 29
Exchanging the control 36
Grating period 16
Grounding diagram 9
Hardware, ID number 6
Installing the TNC 122 37
kv factor 24
kv -factor, multiplication factor for 27
Line count 16
Machine datum 19
Machine integration 16
Machine parameter list 38
Machine parameter software identifiers 36
Marker list 61
Memory test 32
Monitoring functions 29
Monitoring, encoder 30
Monitoring, movement 29
Monitoring, position 29
Monitoring, standstill 29
Movement monitoring 29
NO CONTROL VOLTG 35
Nominal voltage, polarity of 17
Offset compensation 28
Pin layout X1, X2, X3 11
PLC commands 46
PLC EPROM 7; 45
PLC EPROM addresses 45
PLC inputs 12
PLC outputs 12
POS. ERROR 33
Position display 31
Position feedback control 24
Position loop gain 24
Position monitoring 29
Positioning window 29
Power connector X51 11
Power supply 8
Programming station 32
Ramp gradient 24
Rapid traverse control 25
Rapid traverse, analog voltage 26
Reference end position 19
Reference marks 18
Reference marks, distance-coded 19
Removing the TNC 121 36
RS-232-C 15
Screw pitch 16
Servo lag 24
Servo lag, internal adjustment 25
Signal period 16
Software limit switches 17; 19
Software, ID number 6
Specifications 4
Standstill monitoring 29
Tool length in position display 31
Traverse direction 17
Traverse ranges 17
Trip dog 19
V.24 15
Voltage, bottom 24
4/97 TNC 122 15 Subject Index 69
 Loading...
Loading...