


 Loading...
Loading...Mitsubishi HG-JR, HG-KR, HG-RR, HG-MR, HG-UR User Manual
...General-Purpose AC Servo
MODEL
HG-MR
HG-KR
HG-SR
HG-JR
HG-RR
HG-UR
HG-AK
SERVO MOTOR INSTRUCTION MANUAL (Vol. 3)
J

 Safety Instructions
Safety Instructions 
Please read the instructions carefully before using the equipment.
Do not attempt to install, operate, maintain or inspect the equipment until you have read through this Instruction Manual and appended documents carefully and can use the equipment correctly. Do not use the equipment until you have a full knowledge of the equipment, safety information and instructions.
In this Instruction Manual, the safety instruction levels are classified into "WARNING" and "CAUTION".

 WARNING
WARNING

 CAUTION
CAUTION
Indicates that incorrect handling may cause hazardous conditions, resulting in death or severe injury.
Indicates that incorrect handling may cause hazardous conditions, resulting in medium or slight injury to personnel or may cause physical damage.
Note that the CAUTION level may lead to a serious consequence according to conditions. Please follow the instructions of both levels because they are important to personnel safety.
What must not be done and what must be done are indicated by the following diagrammatic symbols.
Indicates what must not be done. For example, "No Fire" is indicated by  .
.
Indicates what must be done. For example, grounding is indicated by  .
.
In this Instruction Manual, instructions at a lower level than the above, instructions for other functions, and so on are classified into "POINT".
After reading this Instruction Manual, keep it accessible to the operator.
A - 1
1. To prevent electric shock, note the following
 WARNING
WARNING
 Before wiring and inspections, turn off the power and wait for 15 minutes or more (20 minutes or more for converter unit and drive unit) until the charge lamp turns off. Then, confirm that the voltage between P+ and N- (L+ and L- for converter unit and drive unit) is safe with a voltage tester and others. Otherwise, an electric shock may occur. In addition, when confirming whether the charge lamp is off or not, always confirm it from the front of the servo amplifier (converter unit).
Before wiring and inspections, turn off the power and wait for 15 minutes or more (20 minutes or more for converter unit and drive unit) until the charge lamp turns off. Then, confirm that the voltage between P+ and N- (L+ and L- for converter unit and drive unit) is safe with a voltage tester and others. Otherwise, an electric shock may occur. In addition, when confirming whether the charge lamp is off or not, always confirm it from the front of the servo amplifier (converter unit).
 Ground the servo motor securely.
Ground the servo motor securely.
 Any person who is involved in wiring and inspection should be fully competent to do the work.
Any person who is involved in wiring and inspection should be fully competent to do the work.
 Do not attempt to wire the servo motor until they have been installed. Otherwise, it may cause an electric shock.
Do not attempt to wire the servo motor until they have been installed. Otherwise, it may cause an electric shock.
 The cables should not be damaged, stressed, loaded, or pinched. Otherwise, it may cause an electric shock.
The cables should not be damaged, stressed, loaded, or pinched. Otherwise, it may cause an electric shock.
 To avoid an electric shock, insulate the connections of the power supply terminals.
To avoid an electric shock, insulate the connections of the power supply terminals.
2. To prevent fire, note the following
 CAUTION
CAUTION
 Install the servo motor on incombustible material. Installing it directly or close to combustibles will lead to a fire.
Install the servo motor on incombustible material. Installing it directly or close to combustibles will lead to a fire.
 Provide an adequate protection to prevent screws and other conductive matter, oil and other combustible matter from entering the servo motor.
Provide an adequate protection to prevent screws and other conductive matter, oil and other combustible matter from entering the servo motor.
3. To prevent injury, note the following
 CAUTION
CAUTION
 Only the voltage specified in the Instruction Manual should be applied to each terminal. Otherwise, a burst, damage, etc. may occur.
Only the voltage specified in the Instruction Manual should be applied to each terminal. Otherwise, a burst, damage, etc. may occur.
 Connect cables to the correct terminals. Otherwise, a burst, damage, etc. may occur.
Connect cables to the correct terminals. Otherwise, a burst, damage, etc. may occur.
 Ensure that polarity (+/-) is correct. Otherwise, a burst, damage, etc. may occur.
Ensure that polarity (+/-) is correct. Otherwise, a burst, damage, etc. may occur.
 The servo motor, etc. may be hot while power is on or for some time after power-off. Take safety measures, e.g. provide covers, to prevent accidental contact of hands and parts (cables, etc.) with them.
The servo motor, etc. may be hot while power is on or for some time after power-off. Take safety measures, e.g. provide covers, to prevent accidental contact of hands and parts (cables, etc.) with them.
 The surface temperature of the servo motor may exceed 100 ˚C depending on its mounting and operating conditions.
The surface temperature of the servo motor may exceed 100 ˚C depending on its mounting and operating conditions.
 During operation, never touch the rotor of the servo motor. Otherwise, it may cause injury.
During operation, never touch the rotor of the servo motor. Otherwise, it may cause injury.
4. Additional instructions
The following instructions should also be fully noted. Incorrect handling may cause a malfunction, injury, electric shock, etc.
(1) Transportation and installation
 CAUTION
CAUTION
 Transport the products correctly according to their mass.
Transport the products correctly according to their mass.
 Use the eyebolt of the servo motor for the transportation purpose only. Do not use the eyebolts to transport the servo motor when it is mounted on a machine.
Use the eyebolt of the servo motor for the transportation purpose only. Do not use the eyebolts to transport the servo motor when it is mounted on a machine.
A - 2
 CAUTION
CAUTION
 Stacking in excess of the specified number of product packages is not allowed.
Stacking in excess of the specified number of product packages is not allowed.
 Do not carry the servo motor by holding the cables, shaft, encoder, or connector.
Do not carry the servo motor by holding the cables, shaft, encoder, or connector.
 Install the servo motor in a load-bearing place in accordance with the Instruction Manual.
Install the servo motor in a load-bearing place in accordance with the Instruction Manual.
 Do not get on or put heavy load on the equipment.
Do not get on or put heavy load on the equipment.
 The equipment must be installed in the specified direction.
The equipment must be installed in the specified direction.
 Do not install or operate the servo motor which have been damaged or have any parts missing.
Do not install or operate the servo motor which have been damaged or have any parts missing.
 Do not block intake and exhaust areas of the servo motor with a cooling fan. Otherwise, it may cause a malfunction.
Do not block intake and exhaust areas of the servo motor with a cooling fan. Otherwise, it may cause a malfunction.
 Do not drop or strike the servo motor. Isolate it from all impact loads.
Do not drop or strike the servo motor. Isolate it from all impact loads.
 Securely fix the servo motor to the machine. If being attached insecurely, the servo motor may come off during operation.
Securely fix the servo motor to the machine. If being attached insecurely, the servo motor may come off during operation.
 The geared servo motor must be installed in the specified direction to prevent oil leakage.
The geared servo motor must be installed in the specified direction to prevent oil leakage.
 When handling the servo motor, be careful about the edged parts such as the corners of the servo motor.
When handling the servo motor, be careful about the edged parts such as the corners of the servo motor.
 Be sure to measure the motor vibration level with the servo motor mounted to the machine when checking the vibration level. A great vibration may cause the early damage of a bearing, encoder, brake, and reducer. The great vibration may also cause the poor connector connection or bolt looseness.
Be sure to measure the motor vibration level with the servo motor mounted to the machine when checking the vibration level. A great vibration may cause the early damage of a bearing, encoder, brake, and reducer. The great vibration may also cause the poor connector connection or bolt looseness.
 For the gain adjustment at the equipment startup, check the torque waveform and the speed waveform with a measurement device, and then check that no vibration occurs. If the vibration occurs due to high gain, the vibration may cause the early damage of the servo motor.
For the gain adjustment at the equipment startup, check the torque waveform and the speed waveform with a measurement device, and then check that no vibration occurs. If the vibration occurs due to high gain, the vibration may cause the early damage of the servo motor.
 Take safety measures, e.g. provide covers, to prevent accidental access to the rotor of the servo motor during operation.
Take safety measures, e.g. provide covers, to prevent accidental access to the rotor of the servo motor during operation.
 Never hit the servo motor or shaft, especially when coupling the servo motor to the machine. Otherwise, the encoder may malfunction.
Never hit the servo motor or shaft, especially when coupling the servo motor to the machine. Otherwise, the encoder may malfunction.
 Do not subject the servo motor shaft to more than the permissible load. Otherwise, the shaft may break.
Do not subject the servo motor shaft to more than the permissible load. Otherwise, the shaft may break.  When you keep or use the equipment, please fulfill the following environment.
When you keep or use the equipment, please fulfill the following environment.
|
Item |
Environment |
||
Ambient temperature |
Operation |
0 °C to 40 °C (non-freezing) |
||
Storage |
-15 °C to 70 °C (non-freezing) |
|||
|
||||
Ambient humidity |
Operation |
80 %RH or less (non-condensing) |
||
Storage |
90 %RH or less (non-condensing) |
|||
|
||||
|
Ambience |
Indoors (no direct sunlight), free from corrosive |
||
|
gas, flammable gas, oil mist, dust, and dirt |
|||
|
|
|||
|
Altitude |
Max. 1000 m above sea level |
||
|
HG-MR Series/HG-KR Series/HG-AK Series |
X, Y: 49 m/s2 |
||
|
HG-SR51/HG-SR81/HG-SR52(4)/ |
|
|
|
|
HG-SR102(4)/HG-SR152(4)/HG-JR53(4)/ |
|
|
|
|
HG-JR73(4)/HG-JR103(4)/HG-JR153(4)/ |
|
|
|
|
HG-JR203(4)/HG-JR353(4)/HG-JR503(4)/ |
|
|
|
|
HG-JR701M(4)/HG-JR11K1M(4)/ |
X, Y: 24.5 m/s2 |
||
|
HG-JR15K1M(4)/HG-JR22K1M(4)/ |
|||
|
|
|
||
Vibration resistance |
HG-JR30K1M(4)/HG-JR37K1M(4)/ |
|
|
|
HG-JR601(4)/HG-JR801(4)/HG-JR12K1(4)/ |
|
|
||
(Note) |
|
|
||
HG-JR15K1(4)/HG-JR20K1(4)/HG-JR25K1(4)/ |
|
|
||
|
|
|
||
|
HG-RR Series/HG-UR72/HG-UR152 |
|
|
|
|
HG-SR121/HG-SR201/HG-SR202(4)/ |
X: 24.5 m/s2 |
Y: 49 m/s2 |
|
|
HG-SR352(4)/HG-UR202/HG-UR352/HG-UR502 |
|||
|
|
|
||
|
HG-SR301/HG-SR421/HG-SR502(4)/ |
X: 24.5 m/s2 |
Y: 29.4 m/s2 |
|
|
HG-SR702(4)/HG-JR703(4)/HG-JR903(4) |
|||
|
|
|
||
|
HG-JR45K1M4/HG-JR55K1M4/ |
X: 9.8 m/s2 Y: 9.8 m/s2 |
||
|
HG-JR30K1(4)/HG-JR37K1(4) |
|||
|
|
|
||
Note. Except the geared servo motor.
A - 3

(2) Wiring
 CAUTION
CAUTION
 Wire the equipment correctly and securely. Otherwise, the servo motor may operate unexpectedly.
Wire the equipment correctly and securely. Otherwise, the servo motor may operate unexpectedly.
 Do not install a power capacitor, surge killer, or radio noise filter (FR-BIF-(H) option) on the servo amplifier (converter unit) output side.
Do not install a power capacitor, surge killer, or radio noise filter (FR-BIF-(H) option) on the servo amplifier (converter unit) output side.
 To avoid a malfunction, connect the wires to the correct phase terminals (U, V, and W) of the servo amplifier (converter unit) and servo motor.
To avoid a malfunction, connect the wires to the correct phase terminals (U, V, and W) of the servo amplifier (converter unit) and servo motor.
 Connect the servo amplifier (converter unit) power output (U, V, and W) to the servo motor power input (U, V, and W) directly. Do not let a magnetic contactor, etc. intervene. Otherwise, it may cause a malfunction.
Connect the servo amplifier (converter unit) power output (U, V, and W) to the servo motor power input (U, V, and W) directly. Do not let a magnetic contactor, etc. intervene. Otherwise, it may cause a malfunction.
Servo amplifier |
|
|
Servo amplifier |
|
|
|
(converter unit) |
U |
Servo motor |
(converter unit) |
U Servo motor |
||
U |
||||||
|
|
U |
|
|
||
V |
V |
M |
V |
V |
M |
|
|
|
|||||
W |
W |
|
W |
W |
|
|
|
|
|
|
|||
 Do not connect AC power supply directly to the servo motor. Otherwise, it may cause a malfunction.
Do not connect AC power supply directly to the servo motor. Otherwise, it may cause a malfunction.  When the cable is not tightened enough to the terminal block, the cable or terminal block may generate heat because of the poor contact. Be sure to tighten the cable with specified torque.
When the cable is not tightened enough to the terminal block, the cable or terminal block may generate heat because of the poor contact. Be sure to tighten the cable with specified torque.
(3) Test run and adjustment
 CAUTION
CAUTION
 Before operation, check the parameter settings. Improper settings may cause some machines to operate unexpectedly.
Before operation, check the parameter settings. Improper settings may cause some machines to operate unexpectedly.
 Never adjust or change the parameter values extremely as it will make operation unstable.
Never adjust or change the parameter values extremely as it will make operation unstable.
(4) Usage
 CAUTION
CAUTION
 Provide an external emergency stop circuit to ensure that operation can be stopped and power switched off immediately.
Provide an external emergency stop circuit to ensure that operation can be stopped and power switched off immediately.
 Do not scratch the coated surface with hard objects nor clean the coated surface with an organic solvent. Doing so may scuff the surface.
Do not scratch the coated surface with hard objects nor clean the coated surface with an organic solvent. Doing so may scuff the surface.
 Do not disassemble, repair, or modify the equipment.
Do not disassemble, repair, or modify the equipment.
 Use the servo amplifier (converter unit) with the specified servo motor.
Use the servo amplifier (converter unit) with the specified servo motor.
 The electromagnetic brake on the servo motor is designed to hold the motor shaft and should not be used for ordinary braking.
The electromagnetic brake on the servo motor is designed to hold the motor shaft and should not be used for ordinary braking.
 For such reasons as service life and mechanical structure (e.g. where a ball screw and the servo motor are coupled via a timing belt), the electromagnetic brake may not hold the motor shaft. To ensure safety, install a stopper on the machine side.
For such reasons as service life and mechanical structure (e.g. where a ball screw and the servo motor are coupled via a timing belt), the electromagnetic brake may not hold the motor shaft. To ensure safety, install a stopper on the machine side.
A - 4
(5) Corrective actions
 CAUTION
CAUTION
 When it is assumed that a hazardous condition may occur due to a power failure or product malfunction, use a servo motor with an electromagnetic brake or external brake to prevent the condition.
When it is assumed that a hazardous condition may occur due to a power failure or product malfunction, use a servo motor with an electromagnetic brake or external brake to prevent the condition.
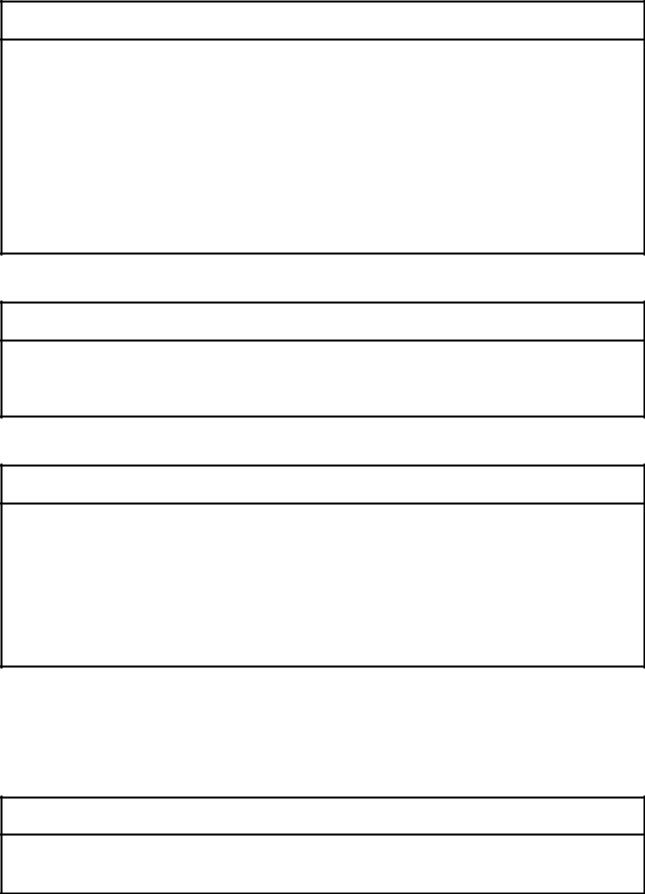
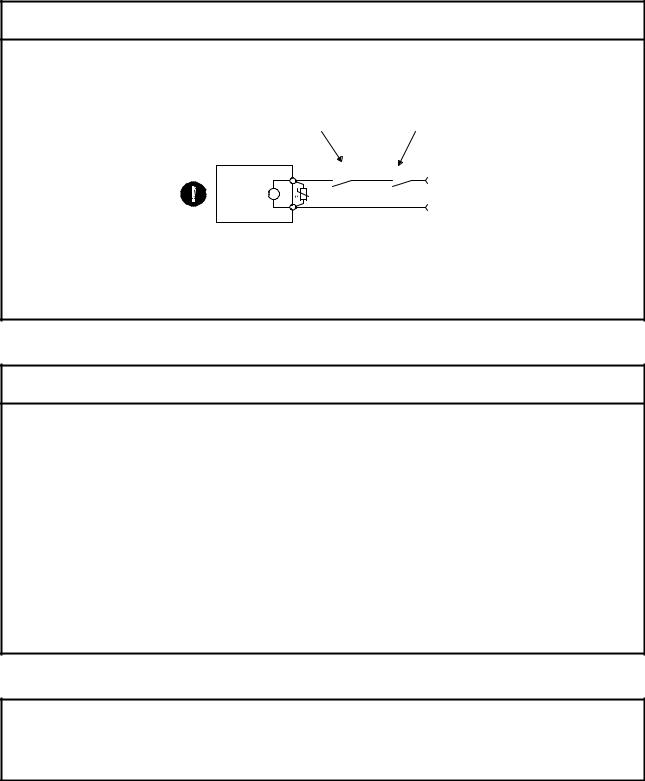
 Configure an electromagnetic brake circuit so that it is activated also by an external EMG stop switch.
Configure an electromagnetic brake circuit so that it is activated also by an external EMG stop switch.
Contacts must be opened when ALM (Malfunction) or MBR (Electromagnetic brake interlock) turns off.
Servo motor
Contacts must be opened with the EMG stop switch.
|
RA |
B |
24 V DC |
Electromagnetic brake
 When any alarm has occurred, eliminate its cause, ensure safety, and deactivate the alarm before restarting operation.
When any alarm has occurred, eliminate its cause, ensure safety, and deactivate the alarm before restarting operation.
 Provide an adequate protection to prevent unexpected restart after an instantaneous power failure.
Provide an adequate protection to prevent unexpected restart after an instantaneous power failure.
(6) Storage
 CAUTION
CAUTION
 Note the followings when storing the servo motor for an extended period of time (guideline: three or more months).
Note the followings when storing the servo motor for an extended period of time (guideline: three or more months).
 Always store the servo motor indoors in a clean and dry place.
Always store the servo motor indoors in a clean and dry place.
 If it is stored in a dusty or damp place, make adequate provision, e.g. cover the whole product.
If it is stored in a dusty or damp place, make adequate provision, e.g. cover the whole product.
 If the insulation resistance of the winding decreases, check how to store the equipment.
If the insulation resistance of the winding decreases, check how to store the equipment.
 Though the servo motor is rust-proofed before shipment using paint or rust prevention oil, rust may be produced depending on the storage conditions or storage period.
Though the servo motor is rust-proofed before shipment using paint or rust prevention oil, rust may be produced depending on the storage conditions or storage period.
If the servo motor is to be stored for longer than six months, apply rust prevention oil again especially to the machined surfaces of the shaft, etc.
 Before using the product after storage for an extended period of time, hand-turn the servo motor output shaft to confirm that nothing is wrong with the servo motor. When the servo motor is equipped with an electromagnetic brake, check it after releasing the electromagnetic brake with the brake power supply.
Before using the product after storage for an extended period of time, hand-turn the servo motor output shaft to confirm that nothing is wrong with the servo motor. When the servo motor is equipped with an electromagnetic brake, check it after releasing the electromagnetic brake with the brake power supply.  When the product has been stored for an extended period of time, contact your local sales office.
When the product has been stored for an extended period of time, contact your local sales office.
(7) General instruction
 To illustrate details, the equipment in the diagrams of this Instruction Manual may have been drawn without covers and safety guards. When the equipment is operated, the covers and safety guards must be installed as specified. Operation must be performed in accordance with this Specifications and Instruction Manual.
To illustrate details, the equipment in the diagrams of this Instruction Manual may have been drawn without covers and safety guards. When the equipment is operated, the covers and safety guards must be installed as specified. Operation must be performed in accordance with this Specifications and Instruction Manual.
A - 5
 DISPOSAL OF WASTE
DISPOSAL OF WASTE 
Please dispose a servo motor and other options according to your local laws and regulations.
«U.S. customary units»
U.S. customary units are not shown in this manual. Convert the values if necessary according to the following table.
Quantity |
|
SI (metric) unit |
U.S. customary unit |
Mass |
1 |
[kg] |
2.2046 [lb] |
Length |
1 |
[mm] |
0.03937 [inch] |
Torque |
1 |
[N•m] |
141.6 [oz•inch] |
Moment of inertia |
1 |
[(× 10-4 kg•m2)] |
5.4675 [oz•inch2] |
Load (thrust load/axial load) |
1 |
[N] |
0.2248 [lbf] |
Temperature |
N [°C] × 9/5 + 32 |
N [°F] |
|
A - 6
|
|
CONTENTS |
|
|
|
||
1. INTRODUCTION |
1- 1 to 1- 8 |
||
1.1 |
Rating plate....................................................................................................................................... |
1- 1 |
|
1.2 |
Parts identification............................................................................................................................. |
1- 2 |
|
1.3 |
Electromagnetic brake ...................................................................................................................... |
1- 3 |
|
1.4 |
Servo motor shaft shapes................................................................................................................. |
1- 5 |
|
1.5 |
Servo motor with functional safety.................................................................................................... |
1- 6 |
|
|
|
||
2. INSTALLATION |
2- 1 to 2- 6 |
||
2.1 |
Mounting direction............................................................................................................................. |
2- 2 |
|
2.2 |
Cooling fan........................................................................................................................................ |
2- 2 |
|
2.3 |
Load remove precautions ................................................................................................................. |
2- 3 |
|
2.4 |
Permissible load for the shaft ........................................................................................................... |
2- 4 |
|
2.5 |
Protection from oil and water ............................................................................................................ |
2- 4 |
|
2.6 |
Cable................................................................................................................................................. |
2- 5 |
|
2.7 |
Servo motor with oil seal................................................................................................................... |
2- 5 |
|
2.8 |
Inspection items ................................................................................................................................ |
2- 5 |
|
2.9 |
Parts having service lives ................................................................................................................. |
2- 6 |
|
2.10 |
Machine accuracies ........................................................................................................................ |
2- 6 |
|
|
|
||
3. CONNECTORS USED FOR SERVO MOTOR WIRING |
3- 1 to 3-12 |
||
3.1 |
Selection of connectors .................................................................................................................... |
3- 1 |
|
3.2 |
Wiring connectors (connector configurations A/B/C)........................................................................ |
3- 5 |
|
3.3 |
Wiring connectors (connector configurations D/E/F/G/H) ................................................................ |
3- 6 |
|
3.4 |
Wiring connectors (connector configurations J/K/L/M/N/P/Q)......................................................... |
3-10 |
|
|
|
||
4. CONNECTION OF SERVO AMPLIFIER AND SERVO MOTOR |
4- 1 to 4-26 |
||
4.1 |
Connection instructions .................................................................................................................... |
4- 2 |
|
4.2 |
Wiring................................................................................................................................................ |
4- 3 |
|
4.2.1 |
HG-MR series/HG-KR series servo motor................................................................................. |
4- 3 |
|
4.2.2 |
HG-SR series/HG-JR series/HG-RR series/HG-UR series servo motor................................... |
4- 8 |
|
4.2.3 |
HG-AK series servo motor ........................................................................................................ |
4-14 |
|
4.3 |
Selection example of wires .............................................................................................................. |
4-16 |
|
4.4 |
Servo amplifier terminal section....................................................................................................... |
4-20 |
|
|
|
||
5. WIRING OPTION |
5- 1 to 5-34 |
||
5.1 |
Cable/connector sets ........................................................................................................................ |
5- 1 |
|
5.1.1 |
Combinations of cable/connector sets....................................................................................... |
5- 2 |
|
5.1.2 Cable and connector list............................................................................................................. |
5- 4 |
||
5.2 |
Encoder cable/connector sets ......................................................................................................... |
5-10 |
|
5.3 |
Servo motor power cable................................................................................................................. |
5-27 |
|
5.4 |
Servo motor power cable (for HG-AK series).................................................................................. |
5-29 |
|
5.5 |
Electromagnetic brake cable ........................................................................................................... |
5-30 |
|
5.6 |
Wires for option cables .................................................................................................................... |
5-32 |
|
1
6. HG-MR SERIES/HG-KR SERIES |
6- 1 to 6-58 |
||
6.1 |
Model code definition........................................................................................................................ |
6- 1 |
|
6.2 |
Combination list of servo motors and servo amplifiers..................................................................... |
6- 2 |
|
6.3 |
Standard specifications..................................................................................................................... |
6- 3 |
|
6.3.1 |
Standard specifications list......................................................................................................... |
6- 3 |
|
6.3.2 |
Torque characteristics................................................................................................................ |
6- 5 |
|
6.4 |
Electromagnetic brake characteristics.............................................................................................. |
6- 6 |
|
6.5 |
Servo motors with special shafts ...................................................................................................... |
6- 7 |
|
6.5.1 |
Key shaft (with 2 round end key) ............................................................................................... |
6- 7 |
|
6.5.2 |
D cut shaft .................................................................................................................................. |
6- 7 |
|
6.6 |
Geared servo motors ........................................................................................................................ |
6- 8 |
|
6.6.1 For general industrial machines (G1)......................................................................................... |
6- 8 |
||
6.6.2 For high precision applications (G5/G7) ................................................................................... |
6-11 |
||
6.7 |
Mounting connectors ....................................................................................................................... |
6-14 |
|
6.8 |
Dimensions ...................................................................................................................................... |
6-15 |
|
6.8.1 |
Standard (without electromagnetic brake and reducer)............................................................ |
6-15 |
|
6.8.2 |
With an electromagnetic brake ................................................................................................. |
6-18 |
|
6.8.3 For general industrial machine with a reducer (without an electromagnetic brake) ................. |
6-21 |
||
6.8.4 For general industrial machine with a reducer (with an electromagnetic brake) ...................... |
6-28 |
||
6.8.5 |
With flange-output type reducer for high precision applications, flange mounting (without an |
||
|
|
electromagnetic brake).............................................................................................................. |
6-34 |
6.8.6 |
With flange-output type reducer for high precision applications, flange mounting (with an |
||
|
|
electromagnetic brake).............................................................................................................. |
6-40 |
6.8.7 |
With shaft-output type reducer for high precision applications, flange mounting (without an |
||
|
|
electromagnetic brake).............................................................................................................. |
6-46 |
6.8.8 |
With shaft-output type reducer for high precision applications, flange mounting (with an |
||
|
|
electromagnetic brake).............................................................................................................. |
6-52 |
|
|
||
7. HG-SR SERIES |
7- 1 to 7-96 |
||
7.1 |
Model code definition........................................................................................................................ |
7- 1 |
|
7.2 |
Combination list of servo motors and servo amplifiers..................................................................... |
7- 2 |
|
7.3 |
Standard specifications..................................................................................................................... |
7- 3 |
|
7.3.1 |
Standard specifications list......................................................................................................... |
7- 3 |
|
7.3.2 |
Torque characteristics................................................................................................................ |
7- 6 |
|
7.4 |
Electromagnetic brake characteristics.............................................................................................. |
7- 8 |
|
7.5 |
Servo motors with special shafts ...................................................................................................... |
7- 9 |
|
7.6 |
Geared servo motors ....................................................................................................................... |
7-10 |
|
7.6.1 |
For general industrial machines (G1/G1H) ............................................................................... |
7-10 |
|
7.6.2 For high precision applications (G5/G7) ................................................................................... |
7-14 |
||
7.7 |
Dimensions ...................................................................................................................................... |
7-17 |
|
7.7.1 |
Standard (without electromagnetic brake and reducer)............................................................ |
7-17 |
|
7.7.2 |
With an electromagnetic brake ................................................................................................. |
7-20 |
|
7.7.3 For general industrial machine with a reducer (without an electromagnetic brake) ................. |
7-27 |
||
7.7.4 For general industrial machine with a reducer (with an electromagnetic brake) ...................... |
7-37 |
||
7.7.5 |
For general industrial machine with a reducer (foot-mounting/without an |
|
|
|
|
electromagnetic brake) ............................................................................................................ |
7-47 |
7.7.6 |
For general industrial machine with a reducer (foot-mounting/with an |
|
|
|
|
electromagnetic brake).............................................................................................................. |
7-57 |
2
7.7.7 |
With flange-output type reducer for high precision applications, flange mounting (without an |
||
|
|
electromagnetic brake).............................................................................................................. |
7-68 |
7.7.8 |
With flange-output type reducer for high precision applications, flange mounting (with an |
||
|
|
electromagnetic brake).............................................................................................................. |
7-75 |
7.7.9 |
With shaft-output type reducer for high precision applications, flange mounting (without an |
||
|
|
electromagnetic brake).............................................................................................................. |
7-82 |
7.7.10 |
With shaft-output type reducer for high precision applications, flange mounting (with an |
||
|
|
electromagnetic brake) ........................................................................................................... |
7-89 |
|
|
||
8. HG-JR SERIES |
8- 1 to 8-46 |
||
8.1 |
Model designation............................................................................................................................. |
8- 1 |
|
8.2 |
Combination list of servo motors and servo amplifiers/drive units ................................................... |
8- 2 |
|
8.3 |
Standard specifications..................................................................................................................... |
8- 8 |
|
8.3.1 |
Standard specifications list......................................................................................................... |
8- 8 |
|
8.3.2 |
Torque characteristics............................................................................................................... |
8-15 |
|
8.4 |
Electromagnetic brake characteristics............................................................................................. |
8-19 |
|
8.5 |
Servo motors with special shafts ..................................................................................................... |
8-20 |
|
8.6 |
Oil seal ............................................................................................................................................. |
8-21 |
|
8.7 |
Cooling fan....................................................................................................................................... |
8-21 |
|
8.8 |
Dimensions ...................................................................................................................................... |
8-22 |
|
8.8.1 Terminal box detail diagram...................................................................................................... |
8-22 |
||
8.8.2 Standard (without an electromagnetic brake) ........................................................................... |
8-23 |
||
8.8.3 |
With an electromagnetic brake ................................................................................................. |
8-37 |
|
|
|
||
9. HG-RR SERIES |
9- 1 to 9-12 |
||
9.1 |
Model designation............................................................................................................................. |
9- 1 |
|
9.2 |
Combination list of servo motors and servo amplifiers..................................................................... |
9- 1 |
|
9.3 |
Standard specifications..................................................................................................................... |
9- 2 |
|
9.3.1 |
Standard specifications list......................................................................................................... |
9- 2 |
|
9.3.2 |
Torque characteristics................................................................................................................ |
9- 4 |
|
9.4 |
Electromagnetic brake characteristics.............................................................................................. |
9- 5 |
|
9.5 |
Servo motors with special shafts ...................................................................................................... |
9- 6 |
|
9.6 |
Oil seal .............................................................................................................................................. |
9- 6 |
|
9.7 |
Dimensions ....................................................................................................................................... |
9- 7 |
|
9.7.1 Standard (without an electromagnetic brake) ............................................................................ |
9- 7 |
||
9.7.2 |
With an electromagnetic brake .................................................................................................. |
9- 9 |
|
|
|
||
10. HG-UR SERIES |
10- 1 to 10-12 |
||
10.1 Model designation.......................................................................................................................... |
10- 1 |
||
10.2 Combination list of servo motors and servo amplifiers.................................................................. |
10- 1 |
||
10.3 Standard specifications.................................................................................................................. |
10- 2 |
||
10.3.1 Standard specifications list...................................................................................................... |
10- 2 |
||
10.3.2 Torque characteristics............................................................................................................. |
10- 4 |
||
10.4 Electromagnetic brake characteristics........................................................................................... |
10- 5 |
||
10.5 Servo motors with special shafts ................................................................................................... |
10- 6 |
||
10.6 Oil seal ........................................................................................................................................... |
10- 6 |
||
10.7 Dimensions .................................................................................................................................... |
10- 7 |
||
10.7.1 Standard (without an electromagnetic brake) ......................................................................... |
10- 7 |
||
3
10.7.2 With an electromagnetic brake................................................................................................ |
10- 9 |
|
|
|
|
11. HG-AK SERIES |
11- 1 to 11-14 |
|
11.1 |
Model designation.......................................................................................................................... |
11- 1 |
11.2 |
Combination list of servo motors and servo amplifiers.................................................................. |
11- 1 |
11.3 |
Standard specifications.................................................................................................................. |
11- 2 |
11.3.1 Standard specifications list...................................................................................................... |
11- 2 |
|
11.3.2 Torque characteristics............................................................................................................. |
11- 4 |
|
11.4 |
Electromagnetic brake characteristics........................................................................................... |
11- 5 |
11.5 |
Servo motors with special shafts ................................................................................................... |
11- 6 |
11.6 |
Dimensions .................................................................................................................................... |
11- 7 |
11.6.1 Standard (without an electromagnetic brake) ......................................................................... |
11- 8 |
|
11.6.2 With an electromagnetic brake............................................................................................... |
11-11 |
|
|
|
|
APPENDIX |
App. - 1 to App. -35 |
|
App. 1 Servo motor ID codes .......................................................................................................... |
App.- 1 |
|
App. 2 Manufacturer list .................................................................................................................. |
App.- 3 |
|
App. 3 Compliance with the CE marking......................................................................................... |
App.- 4 |
|
App. 4 Compliance with UL/CSA standard ..................................................................................... |
App.- 5 |
|
App. 5 Calculation methods for designing....................................................................................... |
App.- 9 |
|
App. 6 Selection example of servo motor power cable.................................................................. |
App.-27 |
|
App. 7 Crimping connector for CNP3_........................................................................................... |
App.-28 |
|
App. 8 Connector dimensions ........................................................................................................ |
App.-29 |
|
App. 9 HG-JR22K1M(4) appearance change ................................................................................ |
App.-35 |
|
4
1. INTRODUCTION
1. INTRODUCTION
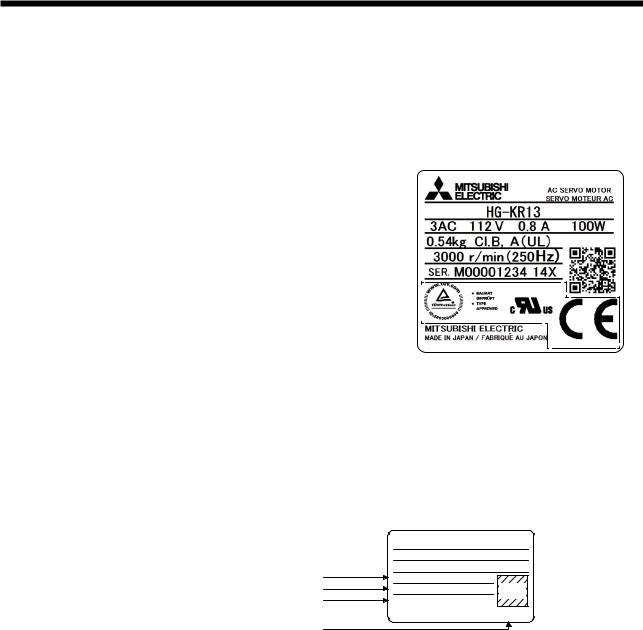
1.1 Rating plate
The following shows an example of rating plate for explanation of each item.
(1) HG-MR/HG-KR/HG-SR/HG-JR/HG-RR/HG-UR series servo motor
Model  Input power and rated output
Input power and rated output  Mass and insulation class
Mass and insulation class  Rated speed
Rated speed  Serial number (Note 1)
Serial number (Note 1) 
(Note 2) 
 Country of origin
Country of origin 
Note 1. Production year and month of the servo motor are indicated in a serial number on the rating plate.
The year and month are indicated by the last two digits of the year and one digit of the month [1 to 9, X(10), Y(11), and Z(12)].
For January 2012, the Serial No. is like, "SER. _ _ _ _ _ _ _ _ _ 121".
2.Products approved by Certification Bodies are marked. The marks depends on the Certification Bodies.
(2) HG-AK series servo motor
Model, Insulation class Input power, Mass Rated output, IP rating Rated speed Serial number (Note)
Country of origin
 MITSUBISHI AC SERVO MOTOR
MITSUBISHI AC SERVO MOTOR
 HG-AK0336 CI.B
HG-AK0336 CI.B  INPUT 3AC 13V 2.2A 0.16kg
INPUT 3AC 13V 2.2A 0.16kg
OUTPUT 30W IP55 |
|
3000 r/min (200Hz) |
QR |
SER. J12345678 125 |
code |
|
|
MITSUBISHI ELECTRIC |
MADE IN JAPAN |
Note. Production year and month of the servo motor are indicated in a serial number on the rating plate.
The year and month of manufacture are indicated by the last two digits of the year and one digit of the month [1 to 9, X (10), Y (11), and Z (12)].
For June 2012, the Serial No. is like, "SER. _ _ _ _ _ _ _ _ _ 126".
1 - 1
1. INTRODUCTION
1.2 Parts identification
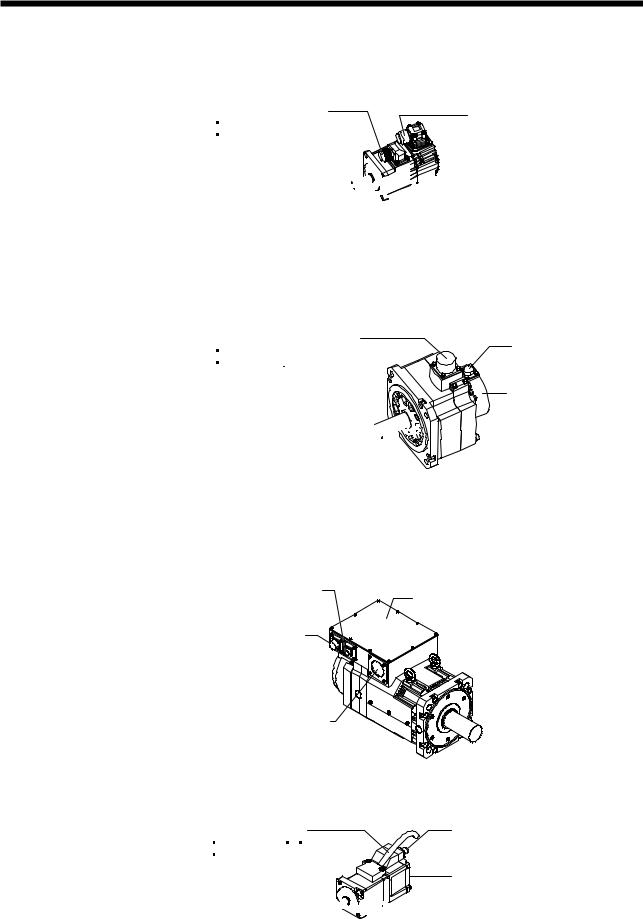
(1) HG-MR series/HG-KR series servo motor
Power cable (Note 1, 2)
Power lead (U/V/W)
Grounding lead
Servo motor shaft 




Encoder cable (Note 1)


 Encoder
Encoder
Note 1. The encoder cable and power supply cable are options.
2.An electromagnetic brake cable is separately required for the servo motor with an electromagnetic brake.
(2)HG-SR series/HG-JR53(4) to HG-JR903(4)/HG-JR701M(4) to HG-JR15K1M(4)/HG-JR601(4) to HG- JR12K1(4)/HG-RR series/HG-UR series servo motor
Power supply connector (Note)
Power supply (U/V/W)
Grounding ( )
)
Servo motor shaft 




 Encoder connector
Encoder connector
Encoder
Note. The servo motor with an electromagnetic brake has the electromagnetic brake connector separately.
(3)HG-JR22K1M(4) to HG-JR37K1M(4)/HG-JR45K1M4/HG-JR55K1M4/HG-JR15K1(4) to HG-JR37K1(4) servo motor
Cooling fan connector
Terminal box
Encoder connector
Power lead hole
 Servo motor shaft
Servo motor shaft
(4) HG-AK series servo motor
Power cable (Note) |
Encoder cable |
Power lead (U V W) |
|
Earth lead |
|
Encoder
Servo motor shaft 




Note. The servo motor with an electromagnetic brake has electromagnetic brake lead.
1 - 2

1. INTRODUCTION
1.3 Electromagnetic brake
The electromagnetic brake is provided to prevent a drop at a power failure or servo alarm occurrence during vertical drive or to hold a shaft at a stop. Do not use it for normal braking (including braking at servo-lock).
The electromagnetic brake has a time lag. Use the electromagnetic brake so that servo motor control starts after the electromagnetic brake has completely opened.
Be sure to check the time lag of the braking with a real machine. CAUTION Configure an electromagnetic brake circuit so that it is activated also by an
external EMG stop switch.
For details of the circuit configuration and timing chart, refer to each servo amplifier instruction manual.
While the electromagnetic brake is opened, the motor may be raised to high temperature regardless of driving.
The life will be shorten under sudden acceleration/deceleration conditions.
The servo motor with an electromagnetic brake can be used to prevent a drop in vertical lift applications or to ensure double safety at an emergency stop, for example. When operating the servo motor, supply power to the electromagnetic brake to release the brake. Switching power off enables the electromagnetic brake.
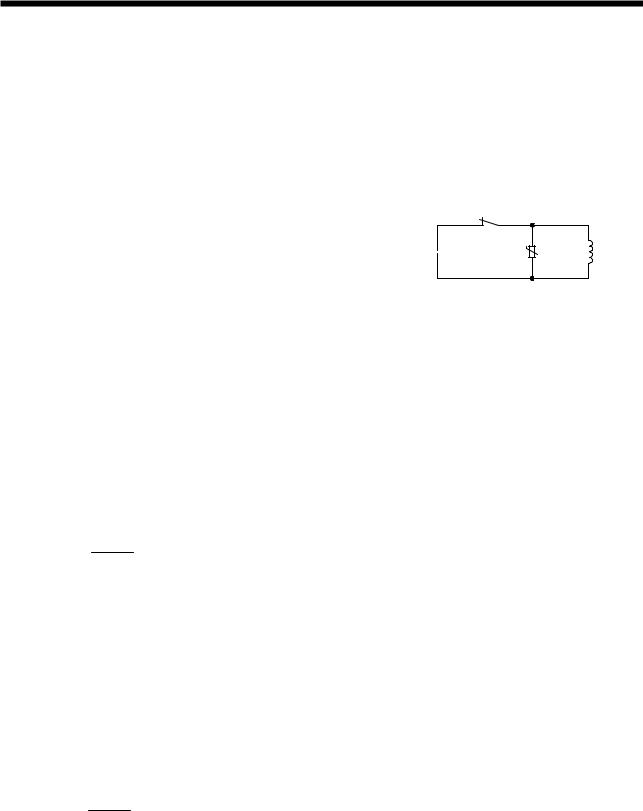
(1)Electromagnetic brake power supply
Prepare the following power supply for use with the electromagnetic brake only. The electromagnetic brake terminals (B1 and B2) have no polarity.
|
|
B1 |
24 V DC |
Switch |
|
|
|
|
power supply for |
VAR U |
B |
electromagnetic brake |
|
|
|
|
B2 |

 Electromagnetic brake
Electromagnetic brake
24 V DC
or power supply for  electromagnetic brake
electromagnetic brake
B1
Switch
VAR U
 B
B
B2 

 Electromagnetic brake
Electromagnetic brake
The surge absorber (VAR) must be installed between B1 and B2. For the selection and example of surge absorbers, refer to "Electromagnetic brake characteristic" in the chapter of servo motor series. When you use a diode for a surge absorber, the electromagnetic braking time will be longer.
1 - 3
1. INTRODUCTION
(2)Sound generation
Though the brake lining may rattle during operation, it poses no functional problem.
If braking sounds, it may be improved by setting the machine resonance suppression filter in the servo amplifier (converter unit) parameters. For details, refer to each servo amplifier instruction manual.
(3)Selection of surge absorbers for electromagnetic brake circuit
The following shows an example how to select a varistor with a surge absorber.
(a)Selection conditions
Item |
Condition |
Electromagnetic brake |
R [Ω]: Resistance |
specification |
L [H]: Inductance |
|
Vb [V]: Power supply voltage |
Desired suppression |
Vs [V] or less |
voltage |
|
Durable surge |
N times |
application time |
|
Relay
 24 V DC
24 V DC
U Varistor |
Brake coil |
(b)Tentative selection and verification of surge absorber
1)Maximum allowable circuit voltage of varistor
Tentatively select a varistor whose maximum allowable voltage is larger than Vb [V].
2)Brake current (Ib) Ib = VbR [A]
3)Energy (E) generated by brake coil
E = L × lb2 [J] 2
4)Varistor limit voltage (Vi)
From the energy (E) generated in the brake coil and the varister characteristic diagram, calculate the varistor limit voltage (Vi) when the brake current (Ib) flows into the tentatively selected varistor during opening of the circuit.
Vi is favorable when the varistor limit voltage (Vi) [V] is smaller than the desired suppressed voltage (Vs) [V].
If Vi is not smaller than Vs, reselect a varistor or improve the withstand voltage of devices.
5)Surge current width (τ)
Given that the varistor absorbs all energies, the surge current width (τ) will be as follows.
E
τ = Vi × lb [S]
6) Examining surge life of varister
From the varistor characteristic diagram, the guaranteed current value (Ip) in which the number of the surge application life is N at the surge current width (τ). Calculate the guaranteed current value (Ip) ratio to brake current (Ib).
If an enough margin is ensured for Ip/Ib, the number of the surge application life N [time] can be considered as favorable.
1 - 4
1. INTRODUCTION
(4)Others
A leakage magnetic flux will occur at the shaft end of the servo motor equipped with an electromagnetic brake. Note that chips, screws, etc. are attracted.
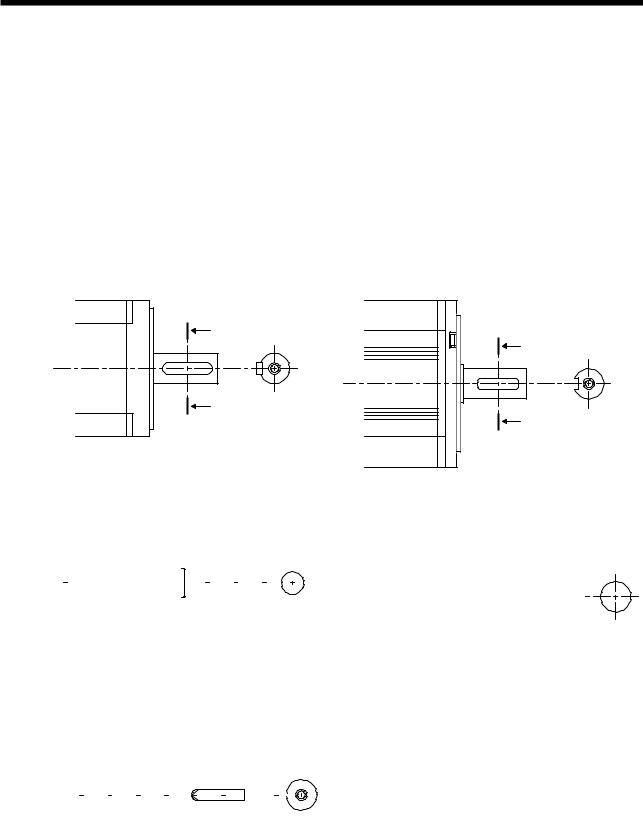
1.4 Servo motor shaft shapes
In addition to the straight shaft, the key shaft and D cut shaft are available.
The key shaft and D cut shaft cannot be used in frequent start/stop applications.
Since we cannot warrant the servo motor against fracture and similar accidents attributable to a loose key, use a friction coupling, etc. when coupling the shaft with a machine.
The shaft shape of the standard servo motor changes depending on the series and capacity. Refer to the chapter of the servo motor series.
The key shaft (with single pointed key) applies to only the geared servo motor for high precision application.
A |
|
A |
Shaft section view AA |
|
A
A |
Shaft section view AA |
|
|
|
|
Key shaft (with 2 round end key) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Key shaft (without key) |
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D cut shaft |
|
|
|
|
|
|
|
|
|
|
|
Straight shaft |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Key shaft (with single pointed key)
1 - 5
1. INTRODUCTION
1.5 Servo motor with functional safety
POINT
When you use a servo motor with functional safety, MR-BT6VCASE battery case cannot be used.
HG-KR, HG-SR, and HG-JR series provide a special specification which expands the safety observation function with the use of MR-D30 functional safety units and MR-J4-_-RJ servo amplifiers. When using the servo motor with functional safety, be sure to attach MR-D30 functional safety unit to the servo amplifier. Other servo motors than HG-KR, HG-SR, and HG-JR series are not compatible with the functional safety. The servo motors with functional safety have the same specifications and dimensions with the standard servo motors.
The following is a list of servo amplifiers which are compatible with the servo motors with functional safety. Refer to section 4.1 of "MR-D30 Instruction Manual" (SH030132) for the available safety observation functions and achievable safety level.
(1) A combination with 200 V/100 V class servo amplifiers
Servo motor with functional safety |
Servo amplifier |
HG-KR053W0C |
MR-J4-10B-RJ |
HG-KR13W0C |
MR-J4-10A-RJ |
|
MR-J4-10B1-RJ |
|
MR-J4-10A1-RJ |
HG-KR23W0C |
MR-J4-20B-RJ |
|
MR-J4-20A-RJ |
|
MR-J4-20B1-RJ |
|
MR-J4-20A1-RJ |
HG-KR43W0C |
MR-J4-40B-RJ |
|
MR-J4-40A-RJ |
|
MR-J4-40B1-RJ |
|
MR-J4-40A1-RJ |
HG-SR51W0C |
MR-J4-60B-RJ |
HG-SR52W0C |
MR-J4-60A-RJ |
HG-JR53W0C |
MR-J4-60B-RJ |
|
MR-J4-60A-RJ |
|
MR-J4-100B-RJ (Note) |
|
MR-J4-100A-RJ (Note) |
HG-KR73W0C |
MR-J4-70B-RJ |
|
MR-J4-70A-RJ |
HG-JR73W0C |
MR-J4-70B-RJ |
|
MR-J4-70A-RJ |
|
MR-J4-200B-RJ (Note) |
|
MR-J4-200A-RJ (Note) |
HG-SR81W0C |
MR-J4-100B-RJ |
HG-SR102W0C |
MR-J4-100A-RJ |
HG-JR103W0C |
MR-J4-100B-RJ |
|
MR-J4-100A-RJ |
|
MR-J4-200B-RJ (Note) |
|
MR-J4-200A-RJ (Note) |
HG-SR121W0C |
MR-J4-200B-RJ |
HG-SR201W0C |
MR-J4-200A-RJ |
HG-SR152W0C |
|
HG-SR202W0C |
|
1 - 6

1. INTRODUCTION
Servo motor with functional safety |
Servo amplifier |
HG-JR153W0C |
MR-J4-200B-RJ |
HG-JR203W0C |
MR-J4-200A-RJ |
|
MR-J4-350B-RJ (Note) |
|
MR-J4-350A-RJ (Note) |
HG-SR301W0C |
MR-J4-350B-RJ |
HG-SR352W0C |
MR-J4-350A-RJ |
HG-JR353W0C |
MR-J4-350B-RJ |
|
MR-J4-350A-RJ |
|
MR-J4-500B-RJ (Note) |
|
MR-J4-500A-RJ (Note) |
HG-SR421W0C |
MR-J4-500B-RJ |
HG-SR502W0C |
MR-J4-500A-RJ |
HG-JR503W0C |
MR-J4-500B-RJ |
|
MR-J4-500A-RJ |
|
MR-J4-700B-RJ (Note) |
|
MR-J4-700A-RJ (Note) |
HG-SR702W0C |
MR-J4-700B-RJ |
HG-JR703W0C |
MR-J4-700A-RJ |
HG-JR701MW0C |
|
HG-JR903W0C |
MR-J4-11KB-RJ |
HG-JR11K1MW0C |
MR-J4-11KA-RJ |
HG-JR15K1MW0C |
MR-J4-15KB-RJ |
|
MR-J4-15KA-RJ |
HG-JR22K1MW0C |
MR-J4-22KB-RJ |
|
MR-J4-22KA-RJ |
Note. This combination increases the maximum torque from 300% to 400% of the rated torque.
(2) A combination with 400 V class servo amplifiers
Servo motor with functional safety |
Servo amplifier |
HG-SR524W0C |
MR-J4-60B4-RJ |
|
MR-J4-60A4-RJ |
HG-JR534W0C |
MR-J4-60B4-RJ |
|
MR-J4-60A4-RJ |
|
MR-J4-100B4-RJ (Note 1) |
|
MR-J4-100A4-RJ (Note 1) |
HG-SR1024W0C |
MR-J4-100B4-RJ |
HG-JR1034W0C |
MR-J4-100A4-RJ |
HG-JR734W0C |
MR-J4-100B4-RJ |
HG-JR1034W0C |
MR-J4-100A4-RJ |
|
MR-J4-200B4-RJ (Note 1) |
|
MR-J4-200A4-RJ (Note 1) |
HG-SR1524W0C |
MR-J4-200B4-RJ |
HG-SR2024W0C |
MR-J4-200A4-RJ |
HG-JR1534W0C |
MR-J4-200B4-RJ |
HG-JR2034W0C |
MR-J4-200A4-RJ |
|
MR-J4-350B4-RJ (Note 1) |
|
MR-J4-350A4-RJ (Note 1) |
HG-SR3524W0C |
MR-J4-350B4-RJ |
|
MR-J4-350A4-RJ |
HG-JR3534W0C |
MR-J4-350B4-RJ |
|
MR-J4-350A4-RJ |
|
MR-J4-500B4-RJ (Note 1) |
|
MR-J4-500A4-RJ (Note 1) |
1 - 7

1. INTRODUCTION
Servo motor with functional safety |
Servo amplifier |
HG-SR5024W0C |
MR-J4-500B4-RJ |
|
MR-J4-500A4-RJ |
HG-JR5034W0C |
MR-J4-500B4-RJ |
|
MR-J4-500A4-RJ |
|
MR-J4-700B4-RJ (Note) |
|
MR-J4-700A4-RJ (Note) |
HG-SR7024W0C |
MR-J4-700B4-RJ |
HG-JR7034W0C |
MR-J4-700A4-RJ |
HG-JR701M4W0C |
|
HG-JR9034W0C |
MR-J4-11KB4-RJ |
HG-JR11K1M4W0C |
MR-J4-11KA4-RJ |
HG-JR15K1M4W0C |
MR-J4-15KB4-RJ |
|
MR-J4-15KA4-RJ |
HG-JR22K1M4W0C |
MR-J4-22KB4-RJ |
|
MR-J4-22KA4-RJ |
Note. This combination increases the maximum torque from 300% to 400% of the rated torque.
1 - 8
2. INSTALLATION
2. INSTALLATION

 WARNING To prevent electric shock, ground each equipment securely.
WARNING To prevent electric shock, ground each equipment securely.
Stacking in excess of the specified number of product packages is not allowed. Install the equipment on incombustible material. Installing it directly or close to combustibles will lead to a fire.
Install the servo motor in a load-bearing place in accordance with the Instruction Manual.
Do not get on or put heavy load on the equipment. Otherwise, it may cause injury. Use the equipment within the specified environmental range. For the environment, refer to the specifications of the servo motor series.
Do not drop or strike the servo motor. Isolate it from all impact loads. Do not install or operate a faulty servo motor.
Do not carry the servo motor by holding the cables, shaft, encoder, or connector. Otherwise, it may cause a malfunction or injury.
Use the eyebolts of the servo motor to only transport it. Do not use the eyebolts to transport the servo motor when it is mounted on a machine.
The geared servo motor must be mounted in the specified direction. Otherwise, it can leak oil, leading to a fire or malfunction.
Securely fix the servo motor to the machine. If being attached insecurely, the servo motor may come off during operation, leading to injury.
Be sure to measure the motor vibration level with the servo motor mounted on the
CAUTION machine when checking the vibration level. A great vibration may cause the early damage of a bearing, encoder, brake, and reducer. The great vibration may also
cause the poor connector connection or bolt looseness.
For the gain adjustment at the equipment startup, check the torque waveform and the speed waveform with a measurement device to check that no vibration occurs. If the vibration occurs due to high gain, the vibration may cause the early damage of the servo motor.
Never hit the servo motor or shaft, especially when coupling the servo motor to the machine. Otherwise, the encoder may malfunction.
When coupling a load to the servo motor, do not use a rigid coupling. Doing so can cause the shaft to break and the bearing to wear out.
Balance the load to the extent possible. Not doing so can cause vibration during servo motor operation or damage the bearings and encoder.
Take safety measures, e.g. provide covers, to prevent accidental access to the rotor of the servo motor during operation.
Do not subject the servo motor shaft to more than the permissible load. Otherwise, the shaft may break, leading to injury.
When the product has been stored for an extended period of time, contact your local sales office.
When handling the servo motor, be careful about the edged parts such as the corners of the servo motor.
2 - 1
2. INSTALLATION
2.1 Mounting direction
(1)Standard servo motor
The following table indicates the mounting direction of the standard servo motor.
Servo motor series |
Mounting direction |
HG-MR |
|
HG-KR |
|
HG-SR |
|
HG-JR |
All directions |
HG-RR |
|
HG-UR |
|
HG-AK |
|
For mounting in the horizontal direction, it is recommended to set the connector section downward. When mounting the motor vertically or obliquely, give a little slack for the connection cable.
Little slack 
(2)Servo motor with an electromagnetic brake
The servo motor with an electromagnetic brake can also be installed in the same orientation as the standard servo motor. When the servo motor with an electromagnetic brake is installed with the shaft end at top, the brake plate may generate sliding sound but it is not a fault.
(3)Geared servo motors
The mounting direction of the geared servo motor differs depending on the reducer type. Be sure to mount it in the specified direction. Refer to the chapter of the servo motor series for details.
2.2 Cooling fan
For the servo motor with a cooling fan, ensure to put enough space for the distance L between intake port and wall surface. Refer to the chapter of the servo motor series for the distance L.
L or more
Servo motor
Cooling fan
Intake
2 - 2
2. INSTALLATION
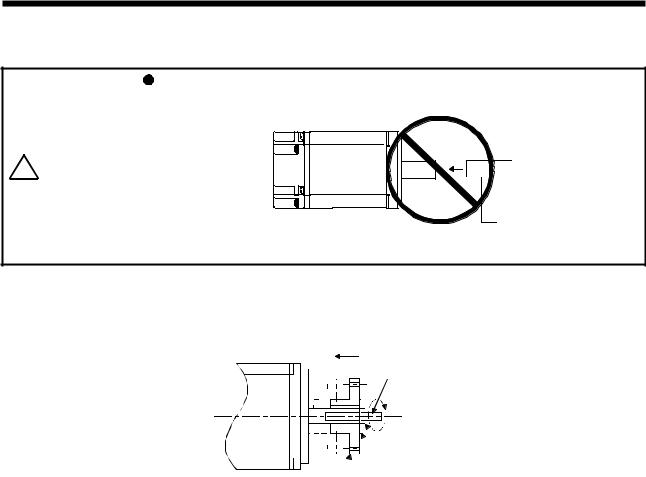
2.3 Load remove precautions
During assembling, the shaft end must not be hammered. Otherwise, the encoder may malfunction.
 CAUTION
CAUTION
 Do not process the shaft to avoid damage to the encoder and bearing.
Do not process the shaft to avoid damage to the encoder and bearing.
(1)When mounting a pulley to the servo motor with a key shaft, use the screw hole in the shaft end. To fit the pulley, first insert a double-end stud into the screw hole of the shaft, put a washer against the end face of the coupling, and insert and tighten a nut to force the pulley in.
Servo motor
Double-end stud
 Nut
Nut
Washer
Pulley
(2)For the shaft without a key, use a friction coupling or the like.
(3)When removing the pulley, use a pulley remover to protect the shaft from hard load and or impact.
(4)To ensure safety, fit a protective cover or the like on the rotary area, such as the pulley, mounted to the shaft.
(5)When a threaded shaft end part is needed to mount a pulley on the shaft, please contact your local sales office.
(6)The direction of the encoder on the servo motor cannot be changed.
(7)When mounting the servo motor, use spring washers, etc. and fully tighten the bolts so that they do not become loose due to vibration.
2 - 3
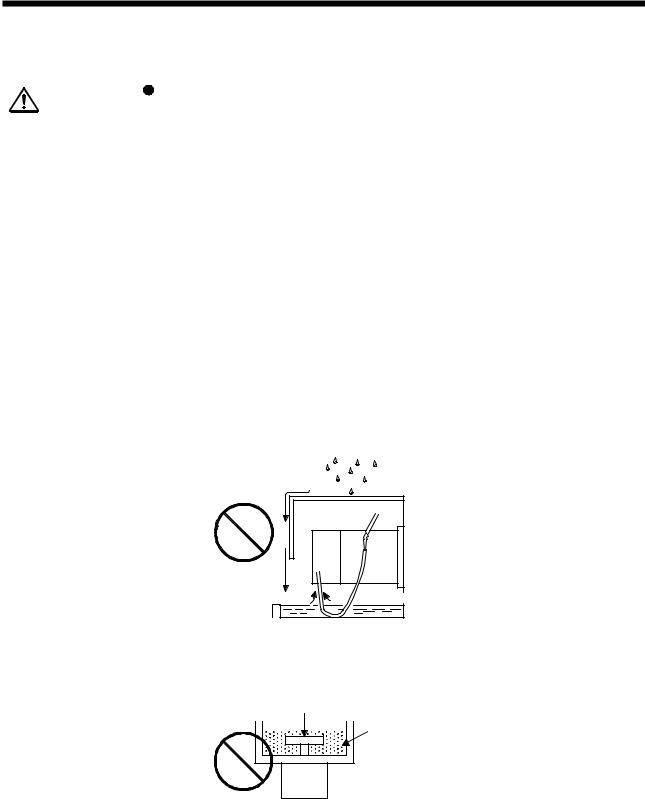
2. INSTALLATION
2.4 Permissible load for the shaft
CAUTION |
Do not use a rigid coupling as it may apply excessive bending load to the shaft of |
the servo motor, leading the shaft to break and the bearing to wear out. |
For the permissible shaft load specific to the servo motor, refer to the chapter of the servo motor series.
(1)Use a flexible coupling and adjust the misalignment of the shaft to less than the permissible radial load.
(2)When using a pulley, sprocket or timing belt, select a diameter that will fit into the permissible radial load.
(3)Excess of the permissible load can cause the bearing life to reduce and the shaft to break.
(4)The load indicated in this section is static load in a single direction and does not include eccentric load. Make eccentric load as small as possible. Not doing so can cause the servo motor to be damaged.
2.5 Protection from oil and water
Provide adequate protection to prevent foreign matter, such as oil from entering the servo motor shaft. When installing the servo motor, consider the items in this section.
(1) Do not use the servo motor with its cable soaked in oil or water.
Cover |
Servo |
motor |
Oil/water pool |
Capillary action
(2)When the servo motor is to be installed with the shaft end at top, provide measures so that it is not exposed to oil and water entering from the machine side, gear box, etc.
Gear
Lubricating oil
Servo motor
(3)If oil such as cutting oil drops on the servo motor, the sealant, packing, cable and others may be affected depending on the oil type.
(4)In the environment where the servo motor is exposed to oil mist, oil, water, grease and/or like, a standard specifications servo motor may not be usable. Please contact your local sales office.
2 - 4
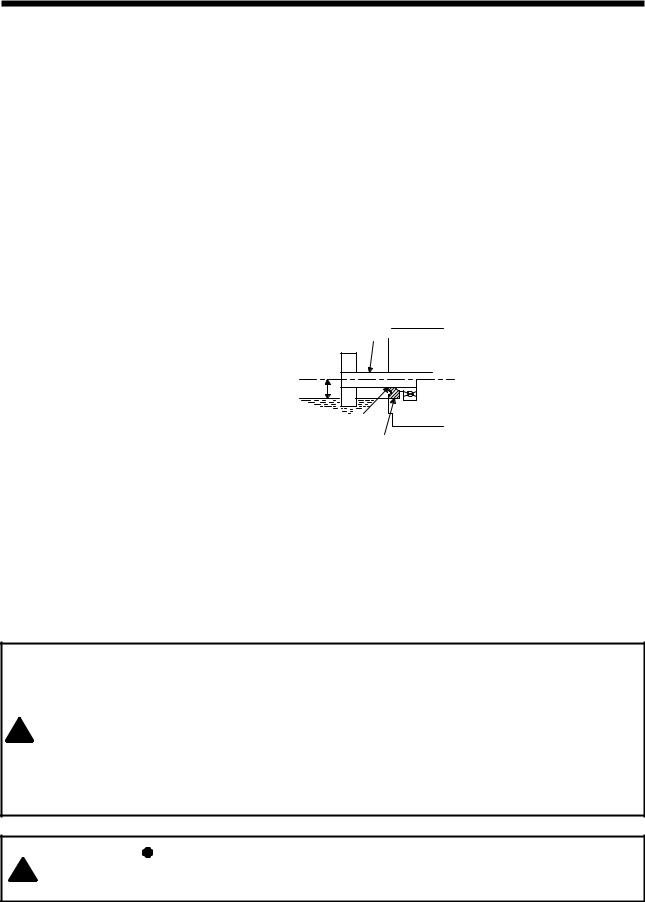
2. INSTALLATION
2.6 Cable
The power supply and encoder cables routed from the servo motor should be fixed to the servo motor to keep them unmovable. Otherwise, the cable may disconnect. In addition, do not modify the connectors, terminals and others at the ends of the cables.
2.7 Servo motor with oil seal
For the servo motor with oil seal, the oil seal prevents the entry of oil into the servo motor. Make sure to install it according in this section.
The functions have no problem even if the servo motor with oil seal may sound during operation.
(1)Pressure and oil level
Install the servo motor horizontally, and set the oil level in the gear box to be lower than the oil seal lip always. If the oil level is higher than the oil seal lip, the oil enter the servo motor and may cause a malfunction. Refer to the chapter of the servo motor series for the oil level.
GearShaft 
Servo motor
Height above oil level h
Lip
Oil seal
High pressure against the oil seal causes the abrasion and makes the life be short. Keep constant internal pressure by equipping a ventilator to the gear box.
(2)Temperature
High temperature against the oil seal lip makes the life be short. Avoid exposing the oil seal lip to high temperature oil since applicable temperature of the material is up to 100 °C and temperature of the oil seal lip rises within 10 °C to 15 °C at maximum rotation.
2.8 Inspection items
 Before starting maintenance and/or inspection, turn off the power and wait for 15 minutes or more (20 minutes or more for converter unit and drive unit) until the charge lamp turns off. Then, confirm that the voltage between P+ and N- (L+ and
Before starting maintenance and/or inspection, turn off the power and wait for 15 minutes or more (20 minutes or more for converter unit and drive unit) until the charge lamp turns off. Then, confirm that the voltage between P+ and N- (L+ and
L- for converter unit and drive unit) is safe with a voltage tester and others.
 WARNING Otherwise, an electric shock may occur. In addition, when confirming whether the charge lamp is off or not, always confirm it from the front of the servo amplifier
WARNING Otherwise, an electric shock may occur. In addition, when confirming whether the charge lamp is off or not, always confirm it from the front of the servo amplifier
(converter unit).
 To avoid an electric shock, only qualified personnel should attempt inspections. For repair and parts replacement, contact your local sales office.
To avoid an electric shock, only qualified personnel should attempt inspections. For repair and parts replacement, contact your local sales office.
Do not perform insulation resistance test on the servo motor. Otherwise, it may  CAUTION cause a malfunction.
CAUTION cause a malfunction.
 Do not disassemble and/or repair the equipment on customer side.
Do not disassemble and/or repair the equipment on customer side.
It is recommended that the following points periodically be checked.
(1) Check the bearings, brake section, etc. for unusual noise.
2 - 5
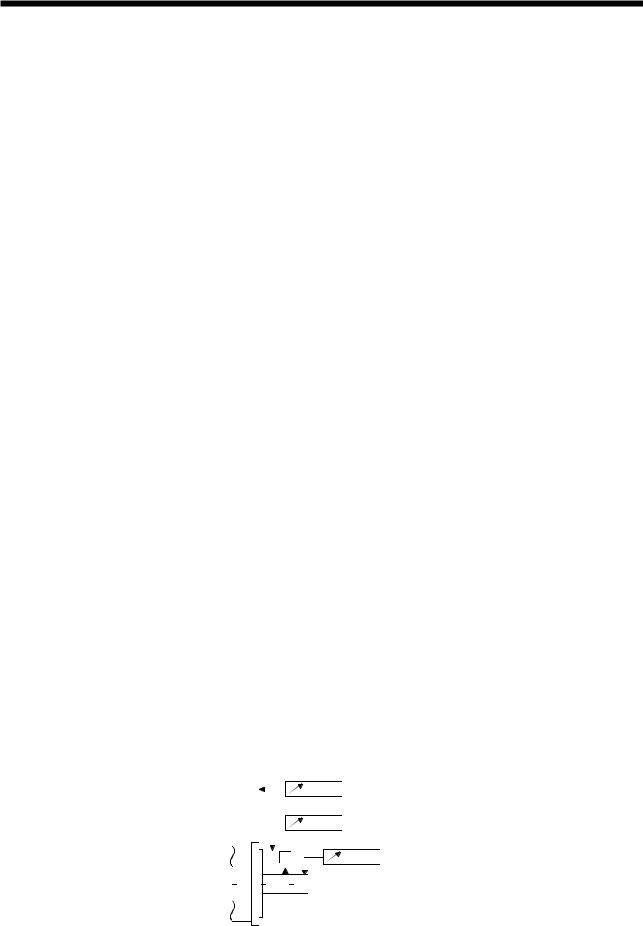
2. INSTALLATION
(2)Check the cables and the like for scratches or cracks. Especially when the cable is movable, perform periodic inspection according to operating conditions.
(3)Check the servo motor shaft and coupling for misalignment.
(4)Check the power supply connector and encoder connector tightening screws for looseness.
2.9 Parts having service lives
Service lives of the following parts are listed below. However, the service lives vary depending on operation and environment. If any fault is found in the parts, they must be replaced immediately regardless of their service lives. For parts replacement, please contact your local sales office.
Part name |
Life guideline |
Bearings |
20,000 hours to |
|
30,000 hours |
Encoder |
20,000 hours to |
|
30,000 hours |
Cooling fan |
20,000 hours |
Oil seal |
5000 hours |
Reducer |
10,000 hours to |
|
20,000 hours |
(1)Bearings
When the servo motor is run at rated speed under rated load, bearings should be exchanged in 20,000 to 30,000 hours as a guideline. This differs on the operating conditions. The bearings must also be changed if unusual noise or vibration is found during inspection.
(2)Oil seal (including oil seal used on the reducer)
Oil seals must be changed in 5,000 hours of operation at rated speed as a guideline. They must also be changed if oil leakage, etc. is found during inspection.
The functions have no problem even if an oil seal may sound during operation.
2.10 Machine accuracies
The following table indicates the machine accuracies of the servo motor around the output shaft and mounting. (except the optional products)
|
|
|
|
Measuring |
|
|
|
|
|
|
|
Flange size |
|
|||||||||
Accuracy [mm] |
|
|
100 × 100 or |
|
|
176 × 176 to |
280 × 280 or |
|||||||||||||||
|
|
position |
|
|
130 × 130 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
less |
250 × 250 |
more |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Runout of flange surface to output |
|
|
|
|
a) |
|
|
0.05 |
0.06 |
|
0.08 |
0.08 |
||||||||||
shaft |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Runout of fitting OD of flange surface |
|
|
|
|
b) |
|
|
0.04 |
0.04 |
|
0.06 |
0.08 |
||||||||||
Runout of output shaft end |
|
|
|
|
c) |
|
|
0.02 |
0.02 |
|
0.03 |
0.03 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
a) |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
b) |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 - 6
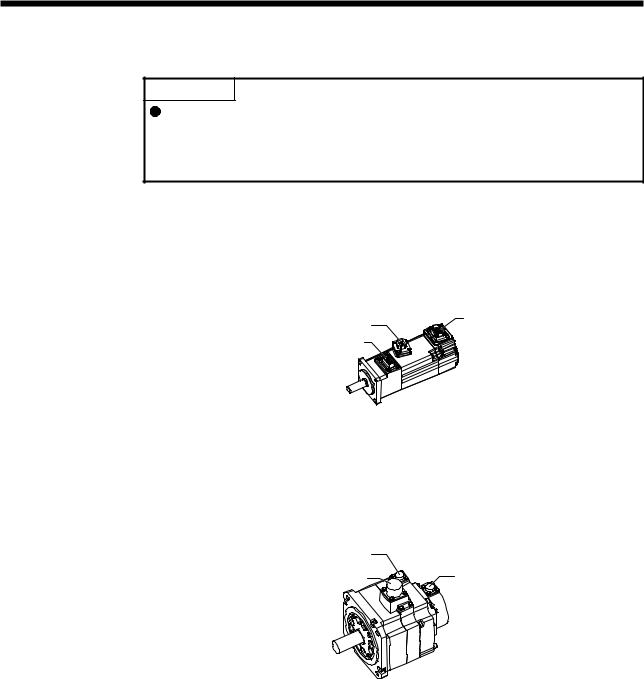
3. CONNECTORS USED FOR SERVO MOTOR WIRING
3. CONNECTORS USED FOR SERVO MOTOR WIRING
POINT
The IP rating indicated is the connector's protection against ingress of dust and water when the connector is connected to a servo motor. If the IP rating of the connector and servo motor vary, the overall IP rating depends on the lowest IP rating of all components.
3.1 Selection of connectors
Use the connector configuration products given in the table as the connectors for connection with the servo motor. Refer to section 3.2 to 3.4 for the compatible connector configuration products.
(1) HG-MR series and HG-KR series
Electromagnetic brake connector |
Encoder connector |
|
|
Power supply connector |
|
|
|
Wiring connector |
|
Servo motor |
For encoder |
For power supply |
For electromagnetic |
|
brake |
||
|
|
|
|
HG-MR_ |
Connector |
Connector |
Connector |
HG-KR_ |
configuration A |
configuration B |
configuration C |
(2) HG-SR series
Electromagnetic brake connector |
|
Power supply connector |
Encoder connector |
|
|
Wiring connector |
|
|
Servo motor |
For encoder |
For power supply |
For electromagnetic |
|
|
brake |
|||
|
|
|
||
HG-SR51 |
|
|
|
|
HG-SR81 |
|
Connector |
|
|
HG-SR52(4) |
|
|
||
|
configuration E |
|
||
HG-SR102(4) |
|
|
||
|
|
|
||
HG-SR152(4) |
|
|
|
|
|
|
|
|
|
HG-SR121 |
Connector |
|
Connector |
|
HG-SR201 |
|
|||
configuration D |
|
configuration F |
||
HG-SR301 |
Connector |
|||
|
|
|||
HG-SR202(4) |
|
configuration G |
|
|
HG-SR352(4) |
|
|
|
|
HG-SR502(4) |
|
|
|
|
HG-SR421 |
|
Connector |
|
|
HG-SR702(4) |
|
configuration H |
|
3 - 1

3. CONNECTORS USED FOR SERVO MOTOR WIRING
(3)HG-JR series
HG-JR53(4) to HG-JR903(4)/HG-JR701M(4) to HG-JR15K1M(4)/HG-JR601(4) to HG-JR12K1(4)
Electromagnetic brake connector |
Encoder connector |
|
Power supply connector
HG-JR22K1M(4) to HG-JR37K1M(4)/HG-JR45K1M4/HG-JR55K1M4/HG-JR15K1(4) to HG-JR37K1(4)
Cooling fan connector
Encoder connector
Servo motor |
|
Wiring connector |
|
|
For encoder |
For power supply |
For electromagnetic |
For cooling fan |
|
|
brake |
|||
|
|
|
|
|
HG-JR53(4) |
|
|
|
|
HG-JR73(4) |
|
|
|
|
HG-JR103(4) |
|
Connector |
|
|
HG-JR153(4) |
|
|
|
|
|
configuration E |
|
|
|
HG-JR203(4) |
|
|
|
|
Connector |
|
Connector |
|
|
HG-JR3534 |
|
|
||
configuration D |
|
configuration F |
|
|
HG-JR5034 |
|
|
||
|
|
|
|
|
HG-JR353 |
|
Connector |
|
|
HG-JR503 |
|
configuration G |
|
|
HG-JR703(4) |
|
|
|
|
HG-JR903(4) |
|
|
|
|
HG-JR701M(4) |
|
|
|
|
HG-JR11K1M(4) |
|
Connector |
|
|
HG-JR15K1M(4) |
|
configuration H |
Connector |
|
HG-JR601(4) |
|
|
configuration J |
|
HG-JR801(4) |
|
|
|
|
HG-JR12K1(4) |
|
|
|
|
HG-JR22K1M(4) |
|
|
|
|
HG-JR30K1M(4) |
Connector |
|
|
|
HG-JR37K1M(4) |
configuration K |
|
|
|
HG-JR45K1M4 |
|
|
|
|
HG-JR55K1M4 |
|
None (terminal box) |
|
Connector |
HG-JR15K1(4) |
|
|
configuration L |
|
|
|
|
||
HG-JR20K1(4) |
|
|
|
|
HG-JR25K1(4) |
|
|
|
|
HG-JR30K1(4) |
|
|
|
|
HG-JR37K1(4) |
|
|
|
|
3 - 2
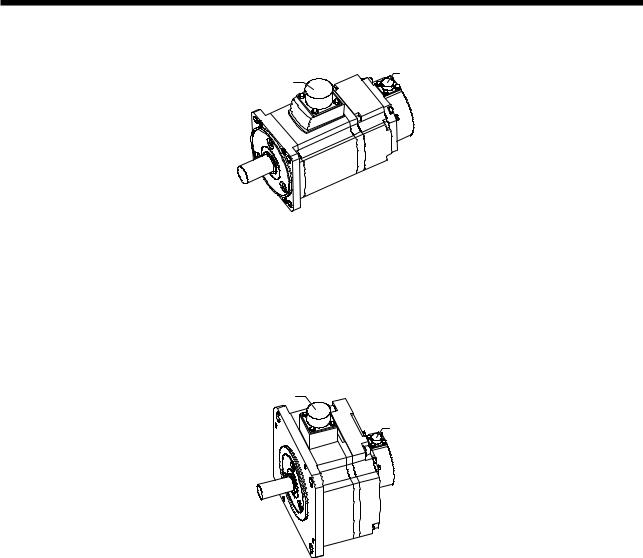
3. CONNECTORS USED FOR SERVO MOTOR WIRING
(4) HG-RR series
Encoder connector
Power connector
Servo motor |
|
Wiring connector |
|
|
For encoder |
For power supply |
For electromagnetic |
||
|
brake |
|||
|
|
|
||
HG-RR103 |
|
Connector |
|
|
HG-RR153 |
|
|
||
Connector |
configuration N |
Sharing for power |
||
HG-RR203 |
||||
configuration D |
|
supply |
||
HG-RR353 |
Connector |
|||
|
|
|||
HG-RR503 |
|
configuration M |
|
(5) HG-UR series
Power connector
Encoder connector
|
|
Wiring connector |
|
|
Servo motor |
For encoder |
For power supply |
For electromagnetic |
|
|
brake |
|||
|
|
|
||
HG-UR72 |
|
Connector |
Sharing for power |
|
HG-UR152 |
Connector |
configuration N |
supply (Note) |
|
HG-UR202 |
|
|
||
configuration D |
Connector |
Connector |
||
HG-UR352 |
||||
|
configuration M |
configuration J |
||
HG-UR502 |
|
|||
|
|
|
Note. Electromagnetic brake connector is not required since the power supply connector has a pin assigned for electromagnetic brake.
3 - 3
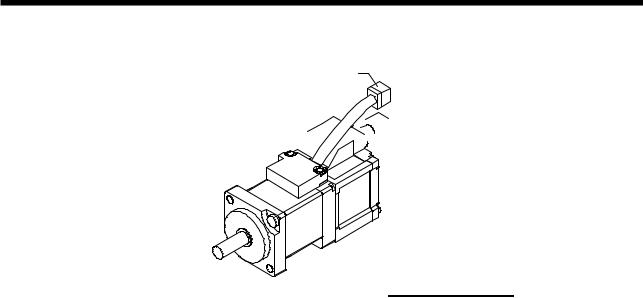
3. CONNECTORS USED FOR SERVO MOTOR WIRING
(6) HG-AK series
Power connector




 Encoder connector
Encoder connector
|
|
Wiring connector |
|
|
Servo motor |
For encoder |
For power supply |
For electromagnetic |
|
|
brake |
|||
|
|
|
||
HG-AK0136 |
Connector configuration |
Connector configuration |
Sharing for power supply |
|
HG-AK0236 |
||||
P |
Q |
(Note) |
||
HG-AK0336 |
||||
|
|
|
Note. An electromagnetic brake connector is not required since the power connector has a pin assigned for electromagnetic brake.
3 - 4
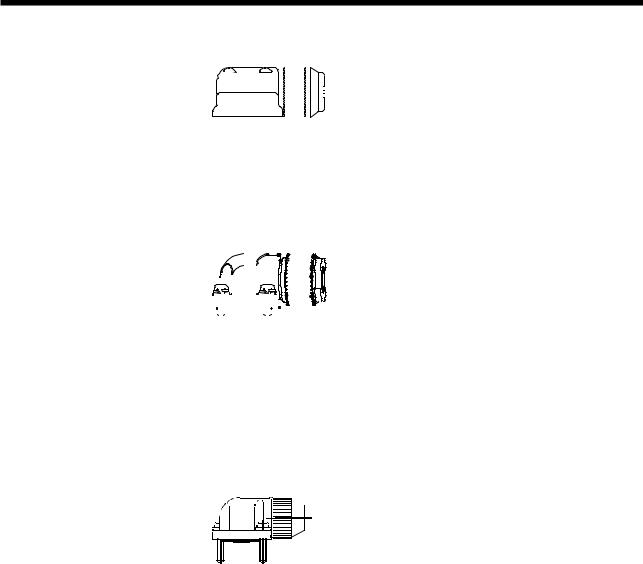
3. CONNECTORS USED FOR SERVO MOTOR WIRING
3.2 Wiring connectors (connector configurations A/B/C)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Connector |
Feature |
Connector |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Crimping tool |
Servo motor encoder |
||||||||||||||||||||||
configuration |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
connector (Note) |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
A |
|
Connector: 2174053-1 |
|
|
|
|
|
|
|
|
|
|
For ground clip: 1596970-1 |
1674339-1 |
|||||||||||||||||||||||||||||
IP65 |
|
|
|
|
|
|
|
|
|
|
For REC. contact: 1596847-1 |
||||||||||||||||||||||||||||||||
(for encoder) |
(TE Connectivity) |
|
|
|
|
|
|
|
|
|
|
(TE Connectivity) |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
(TE Connectivity) |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Note. The other side connector |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Connector |
Feature |
Connector |
Crimping tool |
Servo motor power supply |
|
configuration |
connector (Note) |
||||
|
|
|
|||
|
|
Connector: KN4FT04SJ1-R |
|
|
|
B |
|
HOOD/SOCKET INSULATOR/ |
CT170-14-TMH5B |
JN4AT04NJ1 |
|
IP65 |
BUSHING/GROUND NUT |
||||
(for power supply) |
(JAE) |
(JAE) |
|||
|
|
Contact: ST-TMH-S-C1B-100 (A534G) |
|
|
|
|
|
(JAE) |
|
|
Note. The other side connector
Connector |
|
|
|
Servo motor |
|
Feature |
Connector |
Crimping tool |
electromagnetic brake |
||
configuration |
|||||
|
|
|
connector (Note) |
||
|
|
|
|
||
C |
|
Connector: JN4FT02SJ1-R |
|
|
|
|
HOOD/SOCKET INSULATOR/ |
CT170-14-TMH5B |
JN4AT02PJ1 |
||
(for |
|
||||
IP65 |
BUSHING/GROUND NUT |
||||
electromagnetic |
(JAE) |
(JAE) |
|||
|
Contact: ST-TMH-S-C1B-100 (A534G) |
||||
brake) |
|
|
|
||
|
(JAE) |
|
|
||
|
|
|
|
||
Note. The other side connector |
|
|
|||
3 - 5
Loading...