

Page 1
December 20, 2010
FEIYU
TECH
FY-3ZT
GCS & AFSS AUTOPILOT SYSTEM
INSTALLATION & OPERATION MANUAL
Page 2
GuiLin FeiYu Electronic Technology Co., Ltd.
Dear Pilot,
Thank you for purchasing the FY-3ZT Full Function Autopilot with GCS & AFSS from FeiYu Tech.
In order to achieve full potential and safe operation of this product, please carefully read this manual
prior to installation.
Attention:
The installation and use of this autopilot require advance skill and knowledge in flying
remote controlled fixed wing aircraft, the operations of amateur autopilot system and
ground control station (GCS).
If you are a complete beginner in autopilots, we do not recommend you install this
system on your own.
Please find assistance from an experience flier who may provide you with the basic
knowledge in autopilot systems to ensure successful installation and safe use of this
device. Alternately, you may gain experience by using our FY-3ZT first.
If you are already an experienced pilot and have used autopilot systems before, you will
find this step by step manual intuitive and logical. Just follow the instructions as stated
very carefully and you won‘t go wrong.
FY-3ZT Autopilot: User Agreement
a) The FY-3ZT autopilot system complies with all regulations within the People’s Republic of
China (PRC).
b) It is the end user’s responsibility to ensure compliance to regulations in their own country if
the FY-3ZT is used outside of the PRC.
c) FY-3ZT autopilot system is prohibited to be used for any illegal activity. It is the end user’s
responsibility to take all safety measures in using this product.
d) The Guilin Feiyu Electronic Technology Co. (herewith known as Feiyu Tech) and our
associates are not responsible for any damages or liabilities caused by the use of this product.
e) The FY-3ZT is internationally patented. It is unlawful to reverse engineer, copy or modify this
product in any way.
f) Feiyu Tech reserves the right to update, upgrade or modify the product at any time as we see
fit. We will to the best of our abilities inform existing users if such updates need to be carried
out in units already in use.
g) Feiyu Tech reserves the right to amend this manual and the terms and conditions of use of the
FY-3ZT at any time.
h) By using this product you agree to these terms and conditions effective on the date of
purchase.
Please do not hesitate to e-mail us directly for assistance: service@feiyu-tech.com
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 1
Page 3

GuiLin FeiYu Electronic Technology Co., Ltd.
Introduction: What it Does
FY-3ZT is an advanced autopilot with patented Attitude Flight Stabilization System AFSS™ that
allows you to view and change in real time the flight parameters of your flying aircraft via your
Ground Control Station (GCS).
The parameters include (but are not limited to);
Waypoint setting while in flight,
Automated altitude control,
Ground speed control,
Activation of circling at given points,
Control of circling radius,
Automated Return to Base (RTB),
Automated take-off.
Real time telemetry data transmitted to the GCS include:
Main battery voltage and mAh consumed,
GPS signal strength,
Plane attitude flight stabilization system (AFSS) status,
All parameters as shown on the On Screen Display (OSD)
With the FY-3ZT, autopilot flight via the GCS has never been simpler.
Aircraft Suitability
1. Normal / Traditional fixed-wing planes
2. Delta-winged plane with rudder
3. Delta-winged plane without rudder
4. Plane without aileron
5. V –tail plane with and without aileron
6. Any other configuration, please e-mail us for enquiry: service@feiyu-tech.com
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 2
Page 4

GuiLin FeiYu Electronic Technology Co., Ltd.
Major Auto Pilot Components
1. FY-3ZT provides high-precision flight attitude measurement and control through the utilization
of an integrated 32 ARM7 microprocessor, GPS receiver, three-axis MEMS gyros, three-axis
accelerometer, barometric pressure sensor, attitude algorithm, Kalman filtering and data fusion
algorithms.
2. 10Hz data rate GPS receiver, 35 seconds fast positioning time and accuracy of 2.5 meters CEP.
3. 50HZ inner attitude control, 10HZ outer navigation control.
4. Multi-channel mixed-control output can be adjusted with ease. The control options include:
1. Elevator and rudder navigation
2. Elevator, aileron and rudder navigation
3. Elevator and aileron mixed-control (elevon) navigation
4. V-tail rudder may be used, however a third party mixer have to be supplied by the user.
5. Three control modes:
I. Manual Mode ;
II. AFSS activated (Active Stabilization) ;
III. Automatic navigation control.
6. Two automated navigation control modes:
I. Air route navigation mode ;
II. Mouse controlled flight mode.
7. Three special flight modes:
I. Fixed circling mode;
II. Auto Return to Base (RTB) mode;
III. Auto take-off mode.
8. Any standard RC transmitter and receiver can be used with this system.
9. Automated RTB (Return to Base) protection when there is a break in GCS communication link
via the data radios.This time the system is working in the dataradio control mode.
10. Integrated automatic and manual aerial photography triggering.
11. The GCS software helps integrate Automated and Manual flight control modes in an easy to use
display interface.
12. The GCS software includes electronic map formatting. By using the electronic map, aircraft
route and tasks can be modified in real-time via your GCS computer.
13. Real time display on the the GCS includes flight parameters such as main pack voltage, mAh
consumed, Amp draw, GPS satellite strength and temperature of the autopilot unit.
14. All flight parameters are downloaded automatically by the GCS for instant playback.
15. IMPORTANT: GCS Function
When using the Data Radio to control the aircraft, the controlling signals from the RC
Receiver is directly sent to the Remote Adapter and converted to digital signals. The Data
Radio will then upload the commands to your aircraft via the data radio.
The uploading of data to the aircraft does not involve the GCS. The GCS is only used to
monitor telemetry and flight status of the aircraft. Transmission of commands is minimal. i.e.
the aircraft is mainly controlled by your RC Transmitter.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 3
Page 5
GuiLin FeiYu Electronic Technology Co., Ltd.
Component
Min
Value
Standard
Value
Max
Value
Units
Remark
Main Supply Voltage
4.0 5 6.5
Volt
Main Supply Current
60 mA
At 5V supply
voltage
Altitude Measurement Range
-500
6000
Meter
GPS Ground Speed Measurement
Range
0 350
Meter/Sec
GPS Horizontal Navigation
accuracy
2.5 Meter
Repeat Precision
Barometric Pressure Altitude
accuracy
2
Meter
Repeat Precision
Waypoints setting
98
98 point
programmable
Rudder Servo
3
Channel
Throttle Channel
1
Channel
Servo Output Frequency
1
µS Updated Servo Frequency
50 Hz
Flight status PID Control Rate
50 Hz Navigation Control PID Rate
10 HZ Data Telemetry‘s Track Frequency
1
Hz
Data Telemetry‘s Mission
Frequency
1
Hz
Data Telemetry ‗s Flight Status
frequency
1
Hz
RS-232 Baud Rate
19200
Bps
TTL Level
Operating Temperature
-20
25
60 ℃
Temperature
25 ℃ Controller Module dimension
55×33×20
mm
Bare board weight
Weight
19
grams
AHRS&GPS Module Dimension
55×33×20
mm
Bare board weight
Weight
19
grams
Remote Adapter Module
Dimension
55×33×20
mm
Bare board weight
Weight
17
grams
GPS Module dimension
37×29×8
mm
Bare board weight
Weight
17
grams
Technical parameters
Table 1: Unless specified, values are at operating temperature of 25 ℃.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 4
Page 6
GuiLin FeiYu Electronic Technology Co., Ltd.
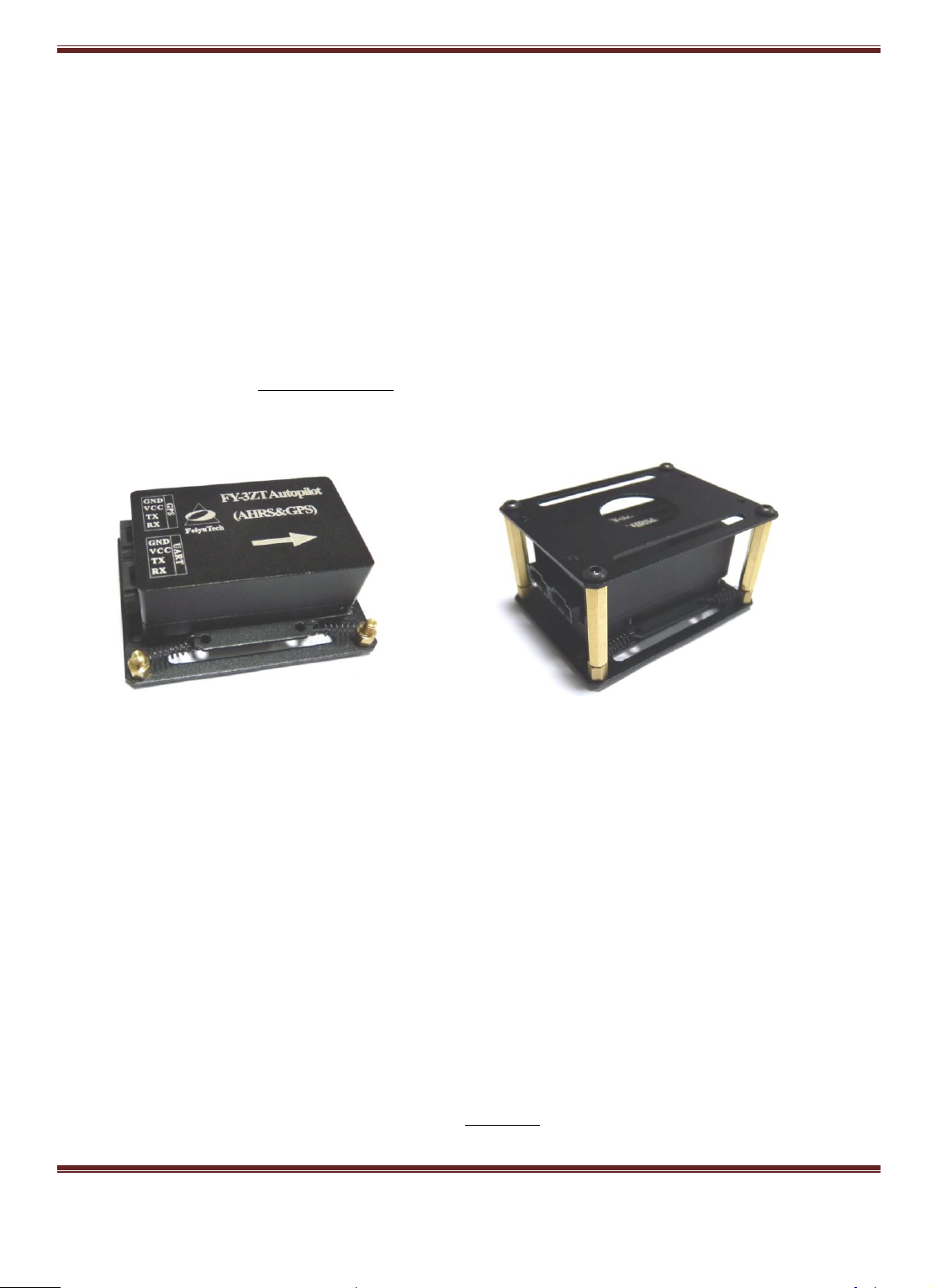
Flight Controller Module
AHRS & GPS Module
Remote Adapter Module
FY-3ZT INSTALATION
1. Before installation, please check and ensure your FY-3ZT pack contains the following main
components:
a. Flight controller module
b. AHRS & GPS module
c. Remote adapter module
d. GPS module
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 5
Page 7

2. Optional components:
FY-606 Data Radio (2.4ghz)
FY-605 Data Radio (433mhz)
GPS Module
a. OSD Video overlay modules
b. Current sensor
c. Data radio module
d. Other fittings
GuiLin FeiYu Electronic Technology Co., Ltd.
Note: Data Radio selection please refer page 8.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 6
Page 8
GuiLin FeiYu Electronic Technology Co., Ltd.
FLIGHT CONTROLLER MODULE INSTALLATION
FLIGHT CONTROLLER MODULE
1. The flight Controller Module has no special requirements for installation. It can be placed
anywhere in the airframe as you wish.
2. The Attitude and Heading Reference System (AHRS) & Global Positioning System (GPS)
module must be placed horizontally and as close as possible to the plane‘s CG (Center of
Gravity). The arrow direction must be pointing towards the nose of the plane (i.e. direction of
flight).
3. When installing please make use of the supplied damper mount (shown below). Otherwise
the vibrations will cause a large data inconsistencies which will adversely affect the autopilot
accuracy.
4. FY-3ZT autopilot integrates a GPS module including a flat-GPS passive antenna. This is a
sensitive antenna for GPS signals, while false signals reflected from the ground is effectively
filtered out. Install the GPS unit horizontally.
5. Keep metal objects and other conductive materials such as carbon fibre away from the GPS
unit. Additionally no transmitting antenna should be around the GPS antenna. The
communication link antenna (FY-606) or your video transmitter should be kept as far away
from the GPS unit as possible.
6. Radio transmissions will increase the noise signals which lead to instability in the positioning
data. The higher the radio noise, the more difficult for the GPS to lock in position.
7. FY-3ZT can integrate with either one of Feiyu Tech‘s two Data Radio modules, the FY-606
(2.4 Ghz) or the FY-602(433 mHz).
8. The Data Radio uplink is responsible for receiving flight navigation data from the GCS. At
the same time, the Data Radio also transmits flight status and other remote sensing
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 7
Page 9

GuiLin FeiYu Electronic Technology Co., Ltd.
information back to the GCS. The asynchronous serial interface protocol between FY-3ZT
autopilot and communications link is RS232-TTL level, the baud rate is 19200.
9. Place the Data Radio module as far as possible away from the GPS module, AHRS, GPS and
servos in order to avoid interference to these equipments. The Data Radio antennas should be
installed vertically upward or downward.
10. The Data Radio communication link range depends on your specific application. If your
aircraft will only be operated within a 5km radius then the FY-606 radio modem will be
sufficient. If you wish longer range then the FY-605 radio modem should be selected.
11. Also consider your Data Radio frequency selection based on your existing radio control
system, to avoid frequency interference.
12. Alternately, you can utilize your own full duplex data modem. The communication link used
by FY-3ZT autopilot can be either a half-duplex or a full-duplex data modem.
13. Warning: Certain frequency bands from the Data Radio (e.g. 433 mHz) can interfere with
servos due to electromagnetic emission. To resolve this issue either avoid placing the Data
Radio transmitter close to sensitive components or use a magnetic core (as shown below) to
reduce the interference.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 8
Page 10
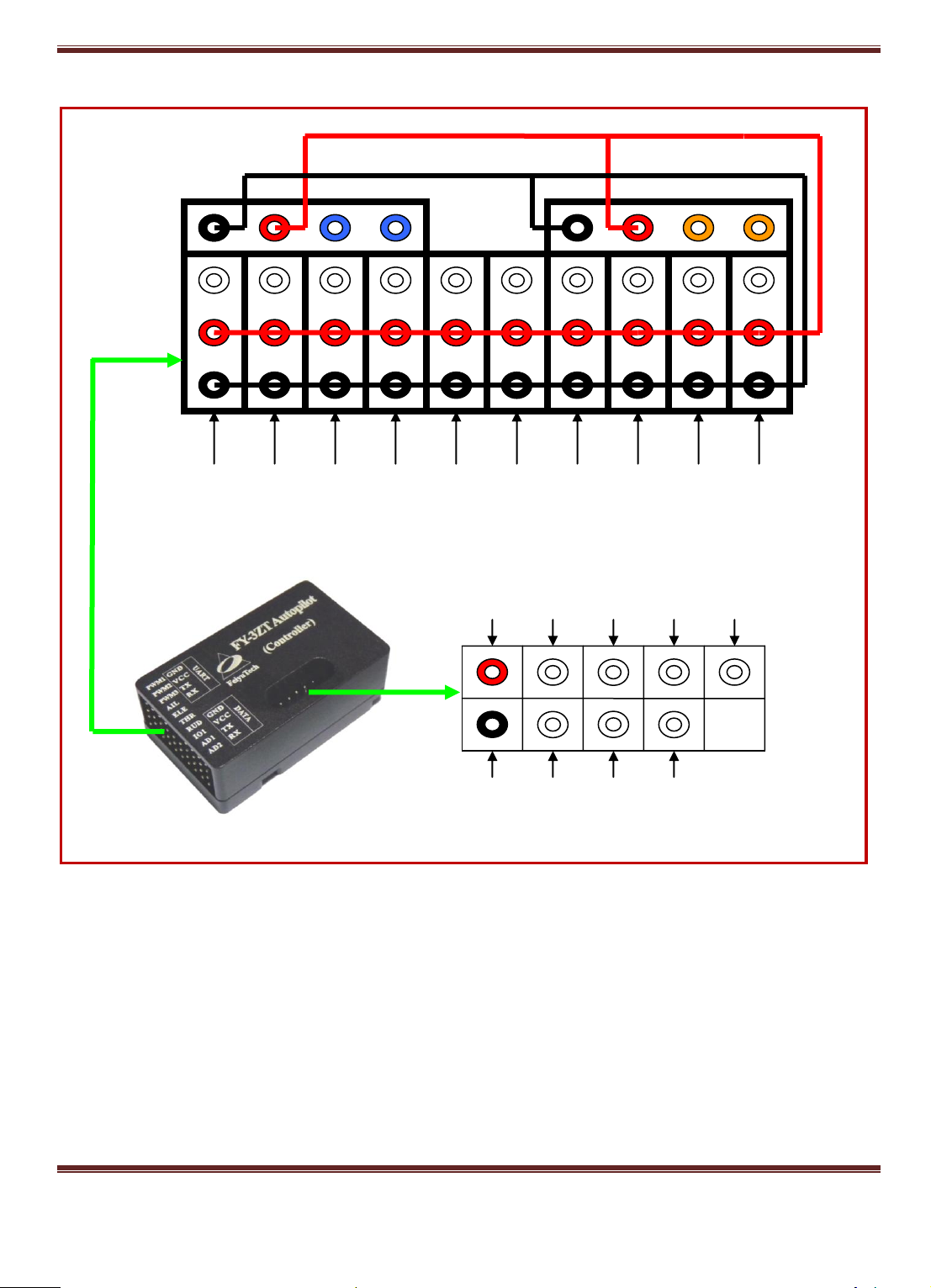
GuiLin FeiYu Electronic Technology Co., Ltd.
9 8 7 6 5 4 3 2 1
10
AIL_OUT
ELE_OUT
THR_OUT
RUD_OUT
Signal
+5V
GND
TX1
RX1
+5V
GND
RX0
TX0
+5V
GND
PWM1
PWM3
PWM2
I/O1
AD1
AD2
GND
ELE_IN
RUD_IN
CH6_IN
+5V
AIL_IN
THR_IN
CH5_IN
CH7_IN
Defined Interface of the FY-3ZT Flight Controller Module
FY-3ZT Controller Module:
Serial port 0
Baud rate: 38400
Data bits: 8
Stop bits: 1
Parity: None
TX0 connected to the RX ‗s AHRS & GPS
RX0 connected to the TX ‗s AHRS & GPS
Serial port 1
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 9
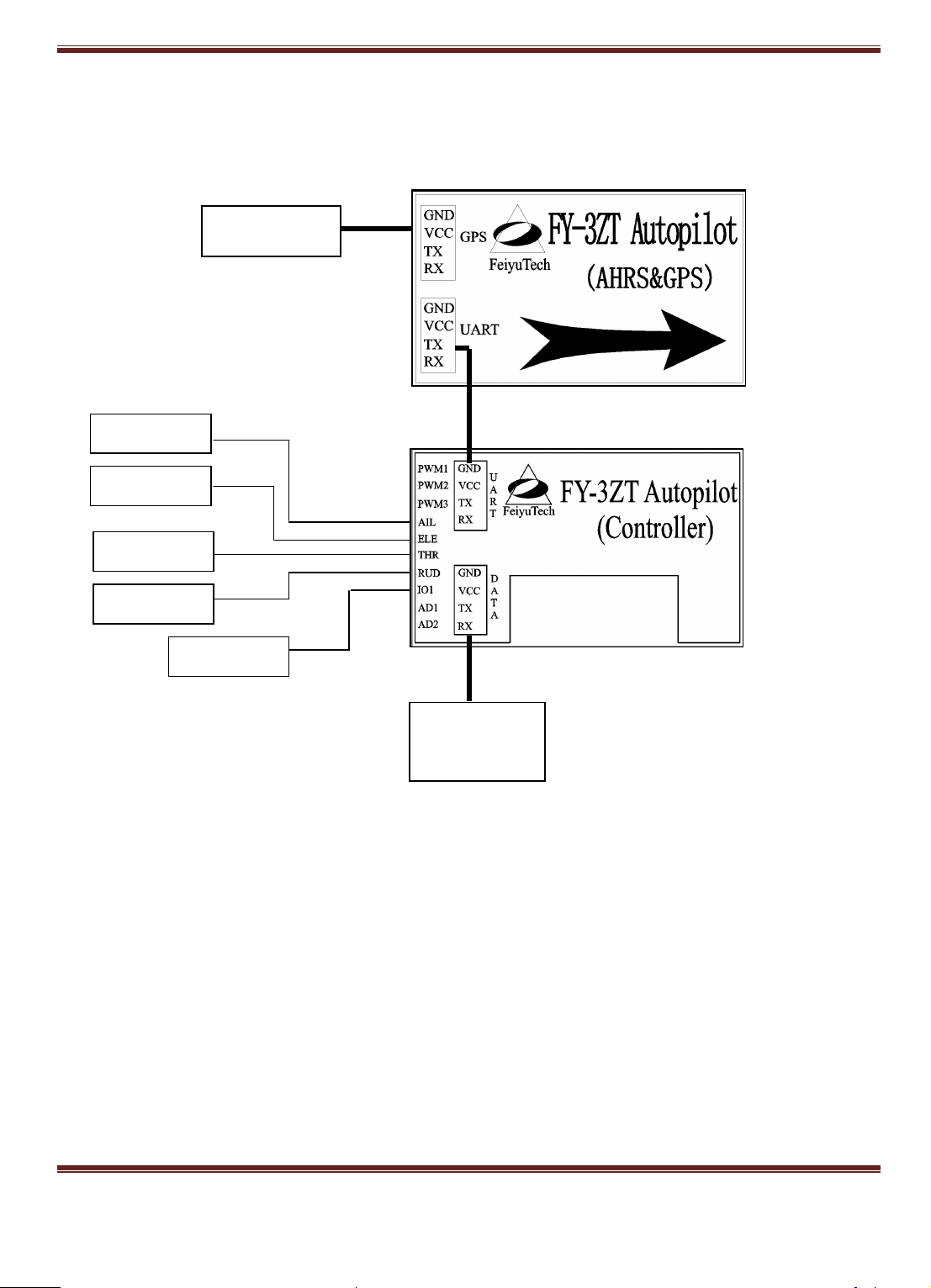
Page 11
GuiLin FeiYu Electronic Technology Co., Ltd.
AHSR&GPS
Data radio
Camera
Servo 1
Servo 2
Aileron servo
Elevator servo
Power supply
Rudder servo
Throttle servo
+
GND
Serial Port 0
Serial Port 1
Voltage monitoring
and Current Sensor
device.
Baud rate: 19200
Data bits: 8
Stop bits: 1
Parity: None
TX1 connected to the RX ‗s data radio
RX1 connected to the TX ‗s data radio
Connection diagram
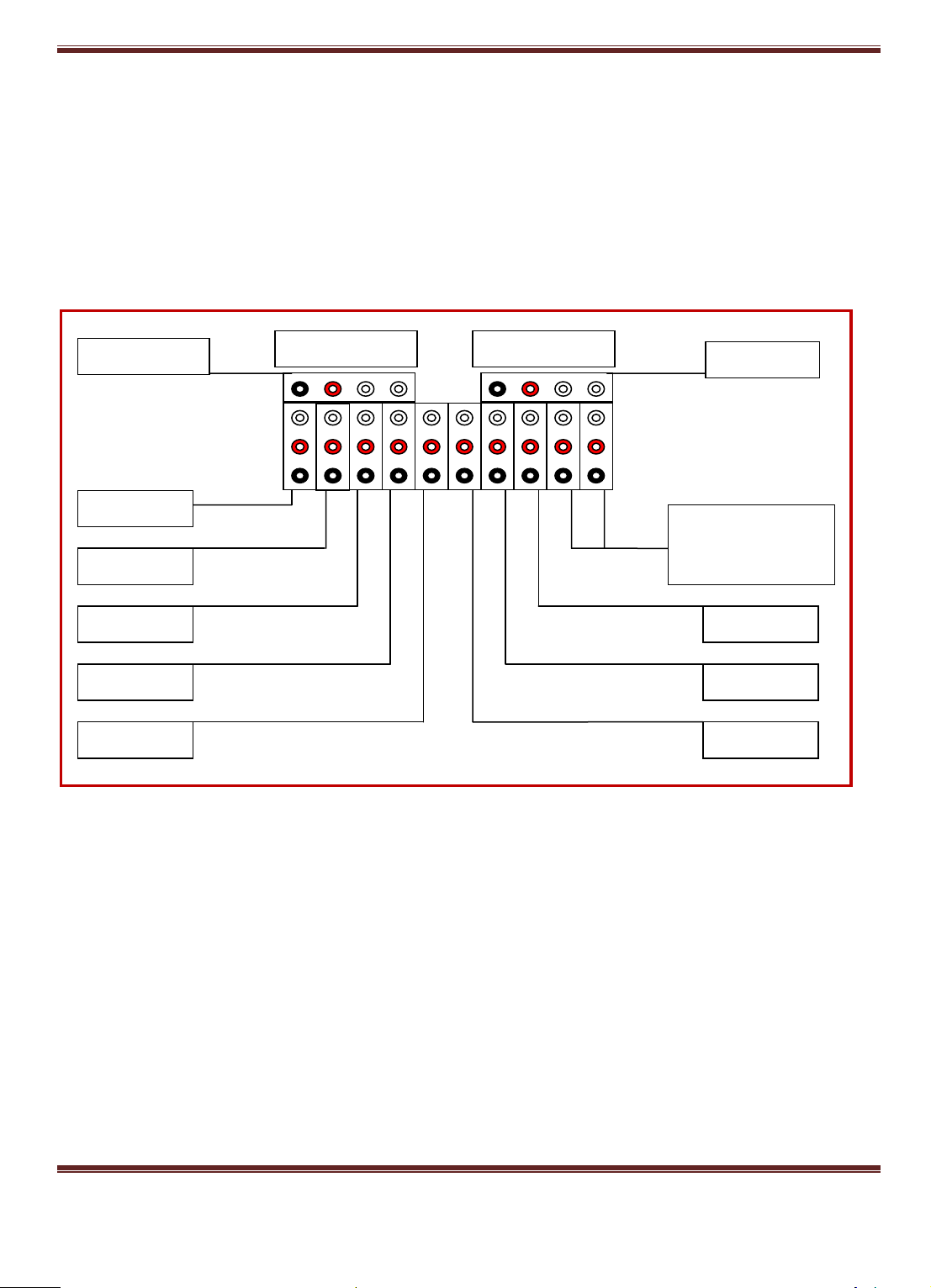
FY-3ZT AHRS & GPS Module Interface
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 10
Page 12
GuiLin FeiYu Electronic Technology Co., Ltd.
+5V
GND
RX1
TX1
+5V
GND
RX0
TX0
Connect to controller module
Connect to GPS module
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 11
Page 13
GuiLin FeiYu Electronic Technology Co., Ltd.
Functions
Description
UART0
Data radio module connection
UART1
Serial port connection to PC
AIL_IN
Aileron
ELE_IN
Elevator
THR_IN
Throttle
RUD_IN
Rudder
CH5_IN
Channel 5
CH6_IN
Channel 6
CH7_IN
Channel 7
AIL_IN
ELE_IN
THR_IN
RUD_IN
Signal
+5V
GND
TX0
RX0
+5V
GND
RX1
TX1
+5V
GND
Not used
CH5_IN
CH6_IN
CH7_IN
No use
FY-3ZT Remote Adapter Module Interface
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 12
Page 14
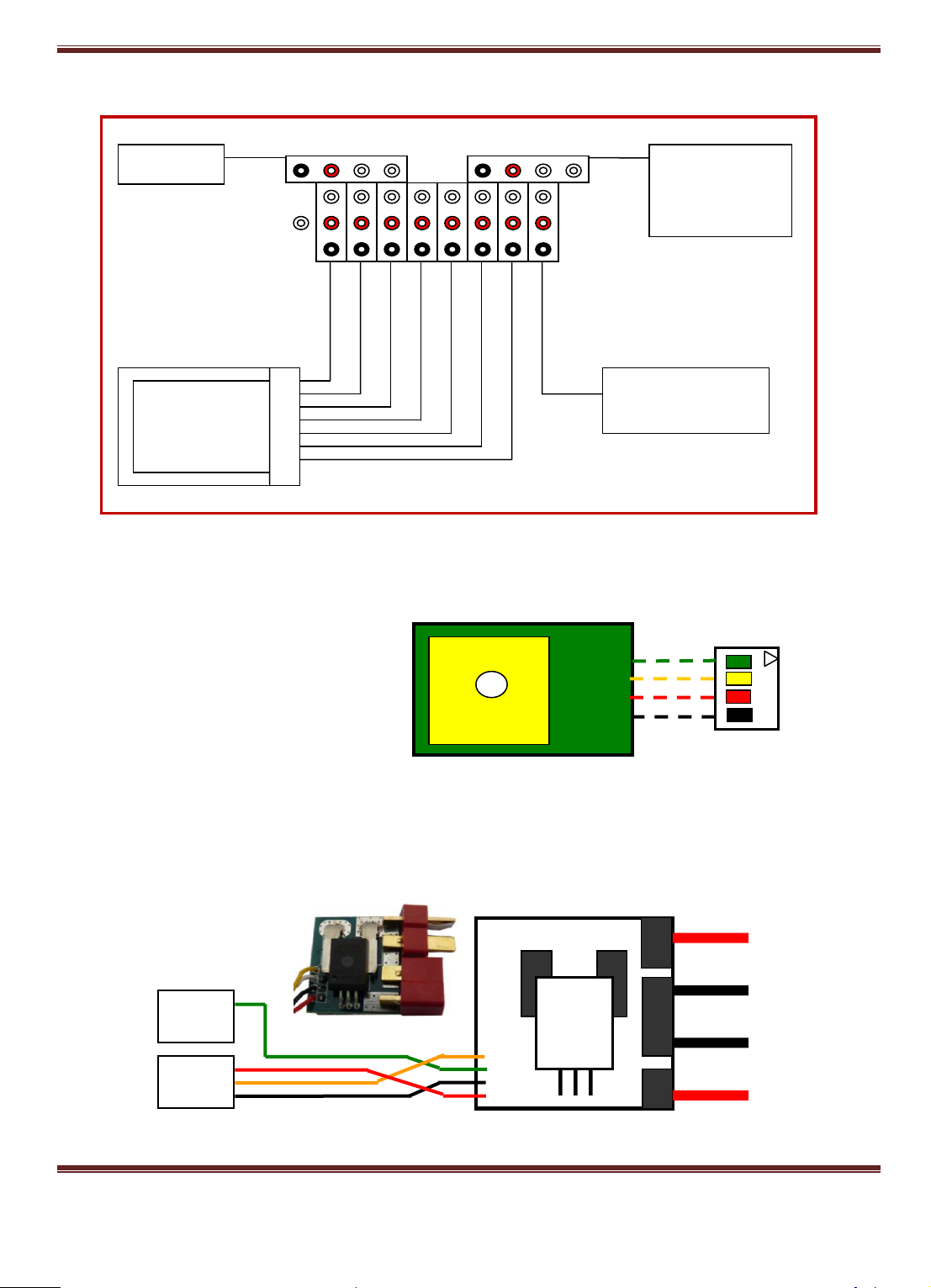
Connection diagram:
Battery positive input
Battery negative input
Output negative to ESC
Output positive to ESC
Yellow
Black
Green
Power Current
signal
Voltage signal
5V Power
GND
Red
Data radio
Serial port
connection to
PC
RC Receiver
5V Power battery
GND
+
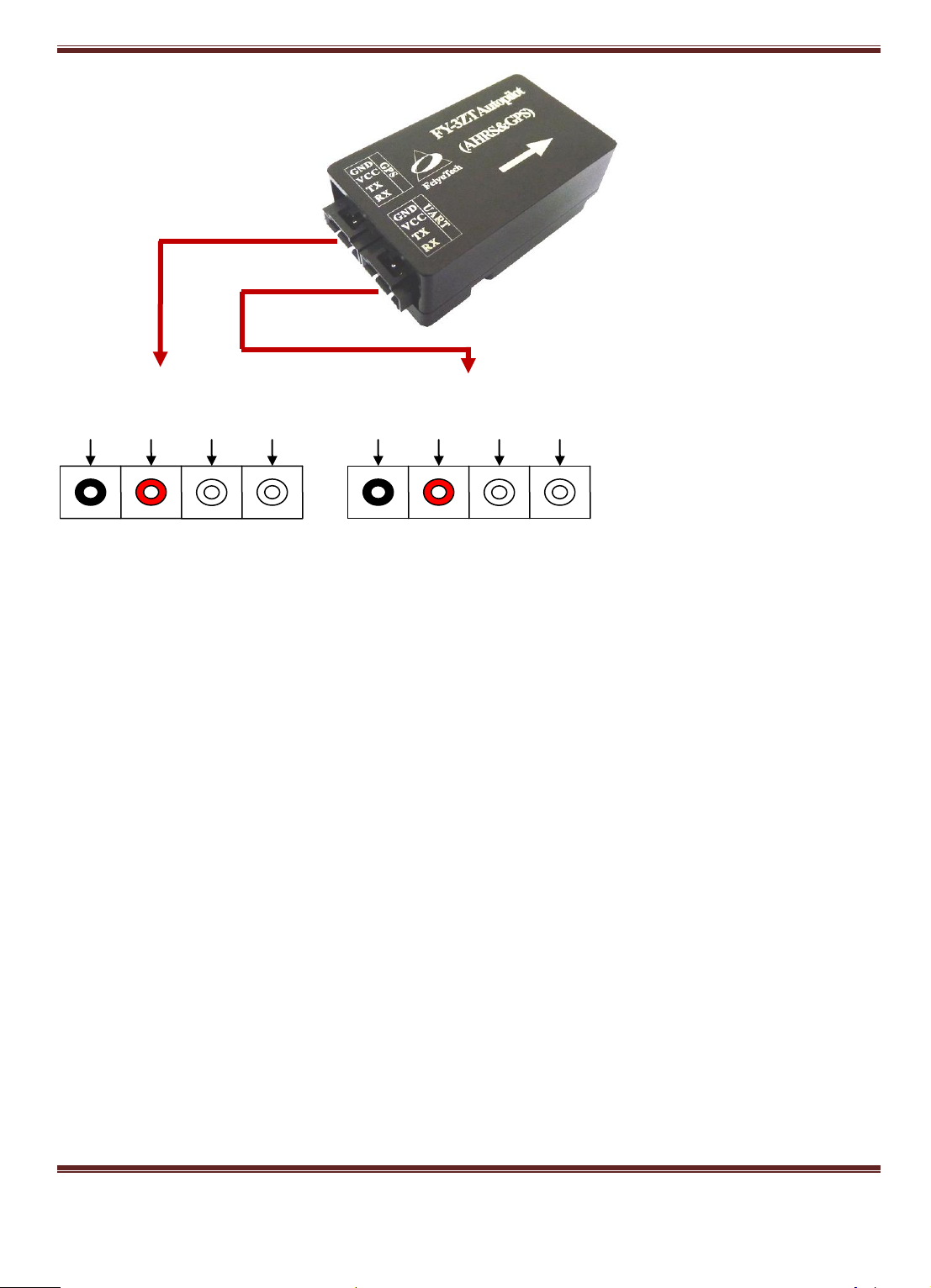
GPS antenna
GND black
RX green
TX yellow
VCC red
GuiLin FeiYu Electronic Technology Co., Ltd.
The interface and features of the GPS circuit board
TX: For Data transmission to the AHRS&GPS
Module (RX1)
RX:For Receiving data transmitted from
AHRS&GPS module (TX1)
Interface Features: TTL level
Baud rate: 38400
Data bits: 8
Stop bits: 1
Parity: None
GPS Data refresh rate: 10Hz
Current sensor:
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 13
Page 15

GuiLin FeiYu Electronic Technology Co., Ltd.
FY-3ZT Power Supply
1. To ensure uninterrupted autopilot function, it is critical that your power system outputs a stable
and clean 5 volt power source to the FY-3ZT system.
2. To avoid current fluctuations, ideally the power source supply to the servos should be separate
from the autopilot.
3. If the power source for the Autopilot system and servos are the same, then we highly
recommend a battery or BEC supply with higher than 3 amps output. Do check this rating
especially if you are using your ESC‘s internal BEC supply as some ESC BECs are not rated for
3amp output.
4. We highly recommend a separate power source for the autopilot system from the receiver and
servos, as this has shown to produce the best results.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 14
Page 16

GuiLin FeiYu Electronic Technology Co., Ltd.
Figure 2: On the aircraft, the radio
modem controls all flight parameters.
No RC receiver is installed in your
aircraft.
Figure 1: At your ground Station, the
signals from your RC Transmitter is
sent to the RC Receiver which is
connected to your computer via the
FY-3ZT Remote Adapter.
AUTOPILOT CONNECTION OPTIONS
There are three options when setting up your FY-3ZT system. Please review them all and choose the
one that best suits your needs.
Option 1: Ground Station Controlled Flight
a) In this option, your aircraft is controlled only by the GCS (Figure 1). With this setup you do
not have a RC receiver in the plane (Figure 2).
b) Your RC Receiver is installed at your ground station. The Receiver servo signal output is fed
into the Remote Adapter.
c) The signals received by the Remote Adapter will be converted to digital signals. The Data
Radio system then up-loads these digital commands to your aircraft.
d) The uploading of data to the aircraft does not involve the GCS. The GCS is only used to
monitor telemetry and flight status of the aircraft. GCS involvement in fight control is
minimal.
e) Warning: In Option 1, the Data Radio range will dictate your flight range. Additionally, due
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 15
Page 17
GuiLin FeiYu Electronic Technology Co., Ltd.
AIL Servo
ELE Servo
GPS Module
Data Radio
RUD Servo
THR Servo
5V battery
to the digital signal conversion and processing, some delay in manual control transmission
will occur. Refer page 13 on notes on data transfer frequency (Hz).
OPTION 1: ON BOARD AIRCRAFT DIAGRAMME
OPTION 1: ADVANTAGE
Option 1 will make on board installation easier since the RC Receiver does not need to be
installed on board.
You save on weight and installation area.
The entire radio and autopilot settings can be carried out at the Ground Station without
involving the aircraft.
Only a 6 channel receiver is required.
OPTION 1: WARNING
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 16
Page 18
GuiLin FeiYu Electronic Technology Co., Ltd.
If you choose to use the 5.0 volt power from your ESC BEC, you can plug the throttle control
wire directly into the ―THR‖ port. However please ensure that your ESC internal BEC can
supply a minimum of 3.0 A current. We highly recommend that you have an external BEC
instead.
The 5.0 volt External BEC power input is connected to the I/O1 port.
OPTION 1: Activation and Deactivation of safety feature
When the plane is controlled by the remote adapter board, it contains a communication
interruption protection function.
If the autopilot detects communication interruption lasting 20seconds or more, it will enter
into auto return mode and come safely home. This is the Default setting.
You can however deactivate this Safety Feature if you so wish. One reason to for deactivation
is that the aircraft will continue flying the set route even without Data Radio communication.
This way, it can complete its flight mission fully autonomously. Of course it would make
sense to have the mission end at the base station so you won‘t lose your plane!
Safety Deactivation Procedure:
a) Shut down (close) the RC SW:
b) Change the Remote Control mode to ―RC remote control‖:
c) By doing the above, all control is transferred to the GCS. All RC Transmitter controls
have been deactivated.
d) If during the flight mission the Data-link is lost, the plane will not activate RTH. It will
continue the planned flight.
The Safety function can be restored at any time (even in flight):
a) Ensure the link of the Data Radio is OK (you can control the plane by the Data Radio.
b) Change the Remote control mode to "Data radio remote
control"
c) Open ―RC SW‖ . The Safety function is now restored.
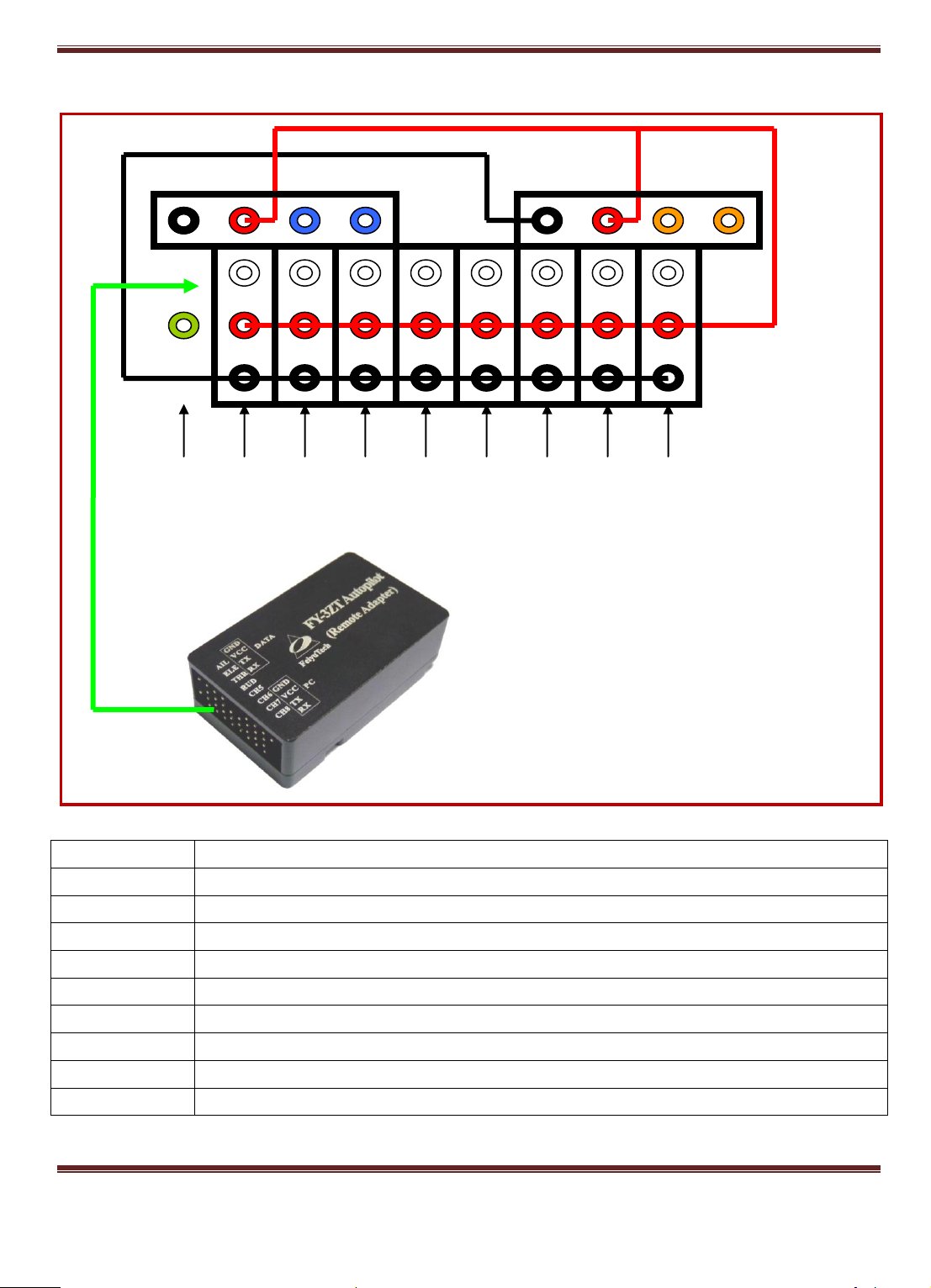
OPTION 1: GROUND STATION DIAGRAMME
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 17
Page 19

GuiLin FeiYu Electronic Technology Co., Ltd.
Data Radio
USB—Serial TTL
RC Remote Receiver
AIL
THR
CH5
ELE
CH6
RUD
Receiver battery
OPTION 1: Ground Station Requirements:
a) You will need at least a 6 channels Receiver
b) You will also need at least two, 3-position switches on your Radio Transmitter.
c) If you wish to use a 5 volt Receiver battery to power the ground station system, please
disconnect the 5 volt power coming from the USB Interface cable (picture below):
OPTION 2: RC RECEIVER ON-BOARD
a) In Option 2, both the RC receiver and Data Radio is installed onboard the aircraft.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 18
Page 20

GuiLin FeiYu Electronic Technology Co., Ltd.
USB—Serial TTL
Data radio
b) Since both systems can be used to control your aircraft, the maximum flight range is either
your RC Transmitter or the Data Radio, whichever can reach further out.
c) e.g. If your RC Transmitter is out of range, while Data Radio is still within range, the Data
Radio can still fly the plane via the planned GCS flight route.
d) In Option 2, you have direct RC Transmitter control of the aircraft, therefore avoiding the
data transfer delays of Option 1.
e) For Option 2, you will need at least a 7 channel Receiver.
f) Two of the channels require a three-position switch (e.g. Channel 5 and 6), while Channel 7
is used to select either the Data Radio (RC receiver on ground) or by the RC Transmitter to
control the aircraft.
OPTION 2: GROUND STATION CONTROL DIAGRAMME
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 19
Page 21

GuiLin FeiYu Electronic Technology Co., Ltd.
NOTE: If you wish to use a 5 volt
Receiver battery to power the ground
station system, please disconnect the 5
volt power coming from the USB
Interface cable.
OPTION 2: ON-BOARD AIRCRAFT SYSTEM DIAGRAMME
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 20
Page 22

GuiLin FeiYu Electronic Technology Co., Ltd.
Data radio
AIL Servo
RUD Servo
THR Servo
ELE Servo
RC Receiver
AIL
THR
CH5
ELE
CH6
RUD
CH7
GPS Module
5.0 volt BEC input (I/O1)
OPTION 2: POWER WARNING
If you choose to use the 5.0 volt power from your ESC BEC, you can plug the throttle control
wire directly into the ―THR‖ port. However please ensure that your ESC BEC can supply a
minimum of 3.0 A current.
However, we highly recommend that you use an external BEC with 3.0 A current output.
The 5.0 volt External BEC power input is connected via I/O1 port.
OPTION 3: TWO RECEIVER SYSTEM
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 21
Page 23

GuiLin FeiYu Electronic Technology Co., Ltd.
WARNING: If you wish to use a 5
volt Receiver battery to power the
ground station system, please
disconnect the 5 volt power in-coming
from the USB Interface cable.
a) Option 3 is the combination of Option 1 and Option 2.
b) In Option 3, you will require two receivers of the same frequency.
c) Ensure that both receivers can be controlled by your RC transmitter.
d) One receiver is installed on board the aircraft (as per Option 2), while the other receiver is
installed at the Ground Station (as per Option 1).
e) The Channel utilization on both the on-board receiver and Ground Station receiver must be
the same.
f) The Ground Station Receiver must be at least 6 channels, while the On-Board Receiver must
be at least 7 channels.
g) Two of the channels require a three-position switch (e.g. Channel 5 and 6), while Channel 7
is used to select either Data Radio (RC receiver on ground) or by the RC Transmitter to
control the aircraft.
OPTION 3: GROUND STATION CONTROL DIAGRAMME
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 22
Page 24

GuiLin FeiYu Electronic Technology Co., Ltd.
Receiver battery
USB—Serial TTL
RC Remote Receiver
AIL
THR
CH5
ELE
CH6
RUD
Ground Station
Diagram
Data Radio
OPTION 3: ON-BOARD AIRCRAFT DIAGRAMME
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 23
Page 25

GuiLin FeiYu Electronic Technology Co., Ltd.
GPS Module
Data radio
AIL Servo
RUD Servo
THR Servo
ELE Servo
5.0 volt BEC input (I/O1)
RC Remote Receiver
AIL
THR
CH5
ELE
CH6
RUD
CH7
OSD & FY-606 DATA RADIO INSTALLATION (ON-BOARD AIRCRAFT)
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 24
Page 26

GuiLin FeiYu Electronic Technology Co., Ltd.
FY-3ZT Controller
FY-3ZT AHRS&GPS
GPS
FY606
Camera
Power
Video
transmitter
ESC
Motor
Current
sensor
5V BEC supply β
Thr & 5V *
ELE
AIL
RUD
Main
Battery Pack
The following is connection diagram between FY-3ZT and the FY-606 Data Radio and OSD module
*
Thr & 5 Volt – Throttle signal input and 5 volt power supply from ESC. Use the ESC BEC
β
5V BEC supply – We highly recommend using an external switching BEC instead of powering
input only if it can output stable 3A current.
via the ESC BEC. Disconnect the power supply (red wire) from the ESC if
you use an external BEC.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 25
Page 27

GuiLin FeiYu Electronic Technology Co., Ltd.
FY606
data radio
USB -- TTL
Note: Please always
disconnect the 5v USB cable
when receiver‘s battery is in
used to power the receiver and
adapter board.
RC reciever
AIL
THR
CH5
ELE
CH6
RUD
CH7
5V supply batteries
FY-3ZT Remoter Adapter
FY-606 DATA RADIO INSTALLATION (GROUND CONTROL)
Below is the connection diagram of the Data Radio and GCS:
Note: Signals of RC Receiver Channel 7 will output directly from the PWM 2 Pin of FY3ZT. This
Channel is used to active or de-active the OSD display function.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 26
Page 28

GuiLin FeiYu Electronic Technology Co., Ltd.
DATA RADIO FREQUENCY CONSIDERATION
1. FeiYu Tech provides two options for Data Radio
frequency:
FY606 – 2.4 GHz, Full Duplex
FY602 – 433 MHz, Half Duplex
2. When considering which Data Radio to choose,
consider the following factors:
a) Frequency interference – select a Data Radio
that will least effect your existing radio system
(Video and RC Transmitter).
b) Speed of Data Transfer – Full Duplex (FY606) will transfer data at a faster rate compared
to half Duplex (FY602). This is important especially when you are using the Data Radio to
manually control your aircraft. The FY606 has a higher data transfer rate (15 to 30 Hz)
compared to FY602 (10 to15 Hz) resulting in less flight control delays.
c) Transmission Range: The FY602 (433 MHz) has a far longer range compared to the FY606
(2.4 Ghz). The FY606 has a tested range of 4 kilometers.
3. The FY system allows you to utilize your own third party data modem. However, please be
careful not to use Data Radio with too high data transfer frequency. The higher the transfer rate,
the more stress on the data communication channel. 2Hz is the preferable refresh rate. (To
change the frequency:- go to ―Communication‖ – ―Telemetry data‖ and select the appropriate
refresh rate).
4. If the outgoing transmission has very high data transfer frequency, as there is a possibility that
the incoming 10Hz telemetry data (longitude, latitude, altitude, airspeed, heading course,
position, flight status, etc.) from your plane to your ground station can be blocked.
5. We advise you choose 2 - 4Hz for Telemetry and 15 - 30Hz for Remote Control when using the
FY606 to avoid two-way signal blockage. Whereas for the half-duplex FY602, choose 1 - 2Hz
for Telemetry and 10 - 15Hz for Remote Control.
6. Because of communication ‗stress‘, too high data transfer rates will also reduce the Data Radio flight range.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 27
Page 29

GuiLin FeiYu Electronic Technology Co., Ltd.
FY-GCS: Ground Control Software
FY-GCS SOFTWARE END USER AGREEMENT
a) The FY-GCS complies with all regulations within the People’s Republic of China (PRC).
b) It is the end user’s responsibility to ensure compliance to regulations in their own country if
the FY-GCS is used outside of the PRC.
c) FY-GCS Software system is prohibited to be used for any illegal activity.
d) The Guilin Feiyu Electronic Technology Co. and our associates are not responsible for any
damages or liabilities caused by the use of this product.
e) The FY-GCS software is internationally patented. It is unlawful to reverse engineer, copy or
modify this product in any way.
f) Feiyu Tech reserves the right to update, upgrade or modify this product at any time.
g) Feiyu Tech reserves the right to amend this manual and the terms and conditions of use of the
FY-GCS Software at any time.
h) By using this product you agree to these terms and conditions effective on the date of
purchase.
i) Please read through the manual carefully and if there is any doubt or questions please do not
hesitate to contact us and our support team.
__________________________________________________________________________
Software Parameters
a) FY-GCS is the ground control software for the FY-3ZT autopilot system.
b) The main features include (but not limited to):
Electronic mapping
Telemetry data monitoring of flight parameters (airspeed, location, flight attitude)
Route (mission) circle radius, flight speed, etc editing in real-time.
Recording and playback of telemetry data into Ground Station Computer.
Map loading, electronic conversion and management
c) The FY-GCS software interface consist of:
Shortcut toolbar,
Status display bar,
Flight instrument display,
Electronic map display area, and
Air route and navigation parameter setting.
FY-GCS SOFTWARE OPERATING REQUIREMENTS
CPU frequency: 1GHz or more.
Memory capacity: 256MB or more.
Hard disk space: At least 50MB free disk space.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 28
Page 30

GuiLin FeiYu Electronic Technology Co., Ltd.
Operating System: Windows98, Windows2000, Windows XP system.
Monitor resolution: 1024x768 or above.
Port: Support 9-pin serial port or USB Serial converter
(Baud rate19200 or more)
Other Peripherals: Keyboard, Mouse.
FY-GCS MODULE INTRODUCTION
Below is the overall view of the GCS Module display on your computer screen:
FY-GCS Graphic User Interface (GUI)
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 29
Page 31

GuiLin FeiYu Electronic Technology Co., Ltd.
The FY-GCS menu and tool bar interface is as follows:
FY-GCS Menu Bar
The Menu Bar consists of MAP, Communication, View and Help.
MAP MENU
1. The Map menu consists of:
Map,
Load Layer,
Save Map and
Save as image:
2. Click on Map: Load map by selecting Map with the extension .GST
3. Load Layer: To add the new layer on top of the original map with the extension .TAB.
4. Save a Map: To save updated Map with the extension .GST
5. Save as Image: To save current Map contents as images with the extension .BMP / .JPG / .GIF
/ .PNG or other image format.
COMMUNICATION MENU
1. Communication menu consists of, Initialization, Port and Baud Rate.
2. Initialization:- start-up software related flight remote control functions.
3. Port:- Setup your COM port by selecting from COM1 to COM16, depending on your computer
setup.
4. Baud rate:- Setup your baud rate by selecting from 300 to 115200, depending on your computer
setup.
AIR ROUTE MANAGEMENT, CONNECTION & SCREEN DISPLAY
1. Air Route Management:- To setup your flight path and other settings, menu windows can be
hidden or unhidden on the right side of the main menu.
2. Connection:- To activate or deactivate a connection. Menu windows can be hidden or unhidden
on the bottom right side of the main menu.
3. Screen Display: Click to change map size.
TOOLBAR
1. Pointer: Used for pointing to the element on the map.
2. Target: Keeps the target plane in the center of the map.
3. Drag: For this tool, you can pan the map by dragging the mouse.
4. Zoom in: Zoom in the map view.
5. Zoom out: Zoom out the map view.
6. Full Map Display: Full map view.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 30
Page 32

GuiLin FeiYu Electronic Technology Co., Ltd.
G CS Button Color
A change in Button colour represent the following:
Green – represent OK
Yellow – represent in progress, if it stays, an error has occurred and it will re-send the command
automatically until the problem has been resolved.
7. Distance Measurement: To measure distance on the map.
8. Area Measurement: To measure area on the map.
9. Flight path eraser: Used to delete all the track points auto generated during the flight in the
e-map. However, the path eraser will not delete waypoints planned before the flight.
10. Layer Control: Manage each layer of the map.
11. Place marker: Add a temporary marker on the map.
ELECTRONIC MAPPING
You can utilize the electronic map to plot the:
aircraft current location,
flight course,
the current target route,
flight tracks,
flight plan objectives and
target destinations can be shown on the map.
Aircraft Route Colour Indicator
RED - Plane Icon: The current aircraft‘s position and heading;
BLUE - Dotted Line: Shows the actual path the aircraft has flown.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 31
Page 33

GuiLin FeiYu Electronic Technology Co., Ltd.
RED Virtual Line: The current target route.
GREEN - Double Line: Flight path.
RED - Flag Icon: Target destination.
METER BAR DISPLAY
a) The meter bar provides a graphical aircraft instrument display area.
b) The instrument panel is divided into 6 sections as shown below:
1. Flight Attitude Instrument: Displays the current pitch and roll angle of the aircraft.
2. GPS Speed:GPS measures the relative velocity, the unit and km/h between the aircraft and
ground. This is otherwise known as ground speed.
3. Barometric altitude: This displays the difference in altitude between the aircraft and the take- off
location in meters.
4. Heading Table: The figures inside the dial represent aircraft heading in degrees x 10. For example:
"3" represents the 30 degrees
"33" represents 330 degrees.
Compass heading is given for North (N), South (S), East (E) and West (W).
The solid triangle indicates the current course of the aircraft.
The orange double-triangle indicates the current target flight path.
5. Air Route and Navigation Parameter Setting.
6. Flight Control and status interface - When the button color is green this means the online
mode is enabled.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 32
Page 34

GuiLin FeiYu Electronic Technology Co., Ltd.
Connection interface:
1. Connect: To established a connection
2. Disconnect:To disconnect a connection
3. Data playback:Start recording by clicking on the checkbox.
Air Route setting:
1. H. Point: Sets your Return to Home (RTH) point. To set this
click the ―H.Point‖ button then click your home location on the
map. The system will automatically upload the Lat, Long & Alt.
The RTH position has to be manual confirmed. This feature
enables you to set RTB at any point within the Electronic Map.
2. Fly now: After you set your latitude, longitude, altitude and
return point you can then fly by wire using the mouse pointer.
3. Add, Edit and Delete: Use these buttons to add, edit, or delete
planned points in the list box below.
4. MOU PLAN: This allows you to upload multiple waypoints to
the aircraft. Use your mouse to add navigational points to the
list by selecting the point then selecting the ―Add‖ button.
5. UPLD SELD: This uploads the selected navigation points
from the list box.
6. END PLAN: This will exit the mouse click navigation
function.
7. DNLD ROU: To download Autopilot‘s air route to the local air
route list.
8. CLEAR: Delete all the navigation points from the local air
route list.
9. UPLD ROU: This uploads the air route from the local air route list to autopilot.
10. OPEN ROU FILE: Load air route file (*. wpt) to the list.
11. SAVE ROU FILE: Save a local air route file (*. wpt) from the list.
12. ROUTE PERANENTS STORAGE: Saves waypoints permanently to FY-3ZT.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 33
Page 35

GuiLin FeiYu Electronic Technology Co., Ltd.
TOP RIGHT BUTTON FUNCTION
1. Automatic photo: Enable automatic photography function.
2. Photo: Captures a photo immediately.
3. RC SW: Enable or Disables Remote control mode switch
(CH5 and CH6)
4. Loop route: This will repeat the current air route (only works in
the air route flight mode)
5. Click point: Fly anywhere on the map by using a mouse pointer
6. Open D: Opens aircraft parachute (if applicable).
7. RC remote control: Enable / Disable manual remote control.
Flight Parameter Setting:
1. TGT SPD: Target ground speed setting in kilometers per hour
(km/h).
2. TGT ALT: Target altitude setting in meters (m).
3. SPI RAD: Circling radius setting in meters (m).
4. Phointval: Set automatic photography interval for photo‘s along
flight path in meter (m).
5. Cruise thr: Set throttle hold.
Parameter Setting 1 and 2
1. Par1: Sets the parameter of each
flight control gain.
Par2: Sets Auto take off, control
reversal, mix control and Gyro
initialization.
2. Mix control: Sets up the mixed
control mode of the autopilot.
This adapts controls for elevons,
ailerons, rudder etc.
3. Control reverse: Set up the
servo and throttle control
direction.
4. Permanents storage: Save the
setting parameters to FY-3ZT
permanently.
5. Gyro Self test: Gyro testing to
see if it works OK.
6. Gyro init: Gyro initialization.
7. Record servo neutral: Record servo neutral when in Level flight.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 34
Page 36

GuiLin FeiYu Electronic Technology Co., Ltd.
GYRO INITIALIZATION via GCS
After activation of the Autopilot system (on the ground) you observe the pitch and roll shown in the
GCS screen does not match the actual pitch and roll of the aircraft you may need to re-initialize the
gyro.
Re-Initialization Procedure
1. Click ‗Gyro init‘.
2. Keep aircraft static for at least 20 seconds
3. Ensure no movement or vibration occurs.
4. After 20 seconds, gyro initialization is complete.
5. Test that the GCS screen now shows correct pitch and roll
movement.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 35
Page 37

GuiLin FeiYu Electronic Technology Co., Ltd.
FY-GCS Software Operation Process
Basic Operation Sequence
1. Connect the serial port to the Data Radio.
2. Software installation: please install the MapInfo Map control if the map does not work
properly.
3. Run the Ground Control Software.
4. Go to Menu – select Map and load map by selecting Map with the extension .GST
Example:
5. To set up the Baud rate, open:
"Communication" the "Port" and "Baud rate", set to 19200.
The default baud rate of FY-3ZT is 19200.
6. Click the green ―Connect‖ button from the ―Switch‖
interface.
- A "Save track log" file dialog box will pop up:
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 36
Page 38

GuiLin FeiYu Electronic Technology Co., Ltd.
- Save your file and it will start communicating with the autopilot panel and began to
record telemetry data to the track log file.
- If a port connection is established successfully, the ―Connect‖ button will turn from Red
to Green.
7. A Red plane icon will appear at your current position and direction will be shown on the map
after the GPS has a lock and the autopilot connection is successful. The flight path will be
shown in blue if the plane is flown to a different location.
8. If the GPS status shows satellites signal strength as more than 4 bars, please proceed to check
if the autopilot control parameters, servo and plane condition work OK. Otherwise, perform
Gyro initialization again (go to Parameter Setting: Par2).
Setting flight route and Return Point
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 37
Page 39

GuiLin FeiYu Electronic Technology Co., Ltd.
1. Next create practical route and return point settings for your mission. Also double check
your parameters settings are correct for your plane (Refer Parameter Setting: Par1 and Par2).
2. Please always do a pre-flight checklist. Ensure the status of the following:
your plane condition,
flight path,
altitude,
waypoint setting, etc.
If everything goes well, you are cleared to take off.
Flight path Planning
1. Click on ―Route‖ tab and select ―Mou Plan‖ (see Right).
2. The flight path designning mode is now enabled on the
map, simply navigate your mouse pointer and select your
flight path, a ―Waypoint Input‖ dialog box will pop up:
3. Please enter your desire altitude in meters, latitude and
longtitude can be edited and entered manually if you wish,
click ―Confirmed waypoint‖ to proceed. This waypoint
will be added to the waypoint list.
4. Flight path will be formed automatically when another
waypoint is set. Additional waypoints will be added to the
waypoint list automatically.
5. To modify the waypoints, just double click on your desired waypoint in the list, then you can
move the waypoint on the map by navigating with your mouse. Click ―UPLD SELD‖ when
you have finished setting up your flight path. This will upload the selected waypoints from
the list.
6. The program will automatically send the navigation points in the local air route list to the
autopilot gradually.
7. Note: Please don‘t click any other buttons when the air route is in the uploading or
downloading status. The entire navigations point information must be successfully loaded
before you click anywhere else or the air route transmission will be interrupted.
Track Record Playback
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 38
Page 40

GuiLin FeiYu Electronic Technology Co., Ltd.
1. Click on the ―Record‖ checkbox and the ―Connect‖ button will change to a ―Record‖ button.
2. To ―Open Track log‖ dialog box, just click on ―Record‖ button. After a saved track log file
has been loaded 3 red bars can be seen on the interface.
The 1st bar will change to Blue-white color when the track is in play-back. After finished
play-back, the color will turn to yellow.
3. You can adjust playback speed by dragging the slide bar forward and backward even while
play-back is running.
4. Select a track file with the extension of .TXT which you wish to open.
5. Then click "Open" the GCS will start to playback the record event.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 39
Page 41

GuiLin FeiYu Electronic Technology Co., Ltd.
The pulse width of
CH 5
1000-1199μS
1200-1800Μs
1801-2000μS
Function
Manual mode
Auto Balance mode
Automatic
Navigation mode
FY-3ZT Debugging instructions
The setup of the FY-3ZT can be started once you have finished installing FY-3ZT and the GCS
software.
Autopilot Function
Flight Control Mode Description:
1. There are three flight control modes: Manual, Auto Balance and Automatic navigation mode.
2. You can utilize Channel 5 to determine Flight Control Modes. Use a 3-position switch on
your radio transmitter.
3. Set CH5 to any 3-position switch on your transmitter.
4. Note: Do not set CH5 to Automatic Control Mode when the Autopilot is on.
Manual mode: This is normal RC manual operation. You have full control over the plane.
The autopilot is DISABLED.
Auto Balance mode: This provides stabilization only. The pilot still has full control over
the direction, altitude and throttle of the plane.
Automatic navigation mode: In this mode, the autopilot will implement the
corresponding automatic control according to the navigation mode which has been set in
the GCS.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 40
Page 42

GuiLin FeiYu Electronic Technology Co., Ltd.
Pulse width of CH6
1000-1199μS
1200-1800μS
1801-2000μS
Function
Return to Base
Idle
Auto Circling
AUTOMATIC NAVIGATION MODE VIA GCS
1. There are two types of Navigation modes:
Waypoint flying and
Mouse pointer flying.
2. The operation of the autopilot is by default set to waypoint flying.
3. The ground station software is required to change the navigation mode.
4. Waypoint Flying Mode: The plane will fly according to the pre-set flight path. When it has
reached its final waypoint, it will circle that point.
5. Mouse Pointer Flying Mode: To enable this mode, click "Click point‖
button as shown and use your mouse to click your designated waypoint on the
map. The plane will fly to that waypoint immediately and wait for your next
command by performing circling flight hold pattern.
6. Special Flight Mode Description: There are three types of special flight modes:
Return to Base (RTB),
Autopilot Deactivated (Idle) ,
Automatic Circling
7. You can set Channel 6 to a 3-position switch to select the Special Flight Modes.
8. The middle position of your three position switch is ―idle mode‖ which means no special
flight modes are active:
9. Return to Base (RTB): No matter what mode your autopilot is in, once RTB mode is
enabled, the plane will initialize RTB (Return to Base). Upon reaching RTB, the aircraft will
initiate a circling holding pattern.
10. Auto Circling: No matter in which mode, once Circling Mode is enabled, the plane will
perform flight holding pattern by circling the current waypoint immediately. The circle
radius is determined by the circle radius you have set. The default value of the circle radius
is 100 meters when autopilot is enabled.
11. Autopilot Deactivated (Idle): In this mode the autopilot is deactivated. You have full
control over your aircraft.
AUTO TAKE-OFF
1. As part of the GCS Auto Navigation Mode, you may select auto take-off by clicking
― ‖ on GCS software.
2. Note that this feature is for inherently stable hand launched planes only.
3. Auto Take-Off will initiate climb to 50 meters before entering level flight.
4. The GCS will then wait for your next command via switch CH5 and CH6.
5. You can cancel Auto Take Off at any time by clicking ―Cancel‖ during the take off procedure.
6. Please refer chapter on Auto-Take off for more information.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 41
Page 43

GuiLin FeiYu Electronic Technology Co., Ltd.
COMMUNICATION DEBUGGING
1. Turn on your computer, and run the GCS ground station software.
2. Turn on the adapter board power supply, the adapter plate light will flash slowly.
3. Select the correct communications port from GCS software. Baud Rate 19200.
4. Turn ON your RC Transmitter.
5. Turn ON the autopilot power.
6. If everything is connected correctly, you will see the received telemetry data through the ground
station software.
7. When the pressure altitude is 0 meters (Note: Auto-Initialization initial boot height is 0 meters).
8. Move your rudder control on the RC transmitter, you will see the rudder output through the
rudder display table. This means the ground station has connected properly with the autopilot.
9. TheFY602 data radio has red and green status lights.
10. FY-602 Red light – Data Radio is ―transmitting‖.
11. FY-602 Green light – Data Radio is ―receiving‖.
12. If you find that transmission of the data radio causes the rudder to ―twitch‖ from interference,
please move the Data Radio transmitter away from the rudder or other effected servos.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 42
Page 44

GuiLin FeiYu Electronic Technology Co., Ltd.
Layout
Options
Normal layout plane
No mix (AIL NAV) or
No mix (AIL&RUD NAV)
Delta-winged plane with rudder
ELE and AIL mix (AIL NAV) or
ELE and AIL mix (AIL&RUD NAV)
Delta-winged plane without rudder
ELE and AIL mix (AIL NAV)
plane without aileron but with elevator and
rudder
No mix (AIL NAV)
SERVO CONTROL DIRECTION AND DEBUGGING
ATTENTION! It is recommended that you remove your prop or disable your motor while
performing these setup procedures!
1. The FY-3ZT module has its own mixing function. Therefore the RC transmitter can be
programmed for a ―normal‖ layout aircraft.
2. Please choose the correct mixing mode in ―Mix control‖ to change the layout of the aircraft.
Following is a table describing the possible layouts:
PRE-FLIGHT CHECK:
3. The following procedure explains how to correct servo control direction upon FY-3ZT
activation.
4. Control direction check: Please set the:
"Rud stability" = 20
"Pitch stability‖ = 50
"Roll stability" = 50
then switch to the "Auto Balance Mode" mode, check the
control direction as explained below.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 43
Page 45

GuiLin FeiYu Electronic Technology Co., Ltd.
Nose UP
Elevator moves up
FY-3ZT IN AUTO BALANCE MODE
Left wing aileron automatically
moves upwards.
Roll right
Right wing aileron automatically
moves downwards
Right wing automatically moves
upwards
Roll left
Left wing aileron automatically
FY-3ZT IN AUTO BALANCE MODE
Aileron Check
5. Holding the plane in your hands roll the plane to the right. The ailerons should give a signal
to counter this roll direction as shown below.
6. If the ailerons move correctly, then you have the correct ―AIL REV‖ setting.
7. If the ailerons do not follow the correct movement, please
set ―AIL REV‖ in the ―Control Reverse‖ box. You should
now see the correct servo movement after ‗checking‘
reverse.
Elevator check:
8. Holding the plane in your hands tilt the nose up and down. The elevator should give a signal
to counter this tilting motion as shown below:
9. If the the elevator does not follow the correct movement,
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 44
Page 46

GuiLin FeiYu Electronic Technology Co., Ltd.
Rotate right
Rudder moves to the left
Rotate left
Rudder moves to the right
FY-3ZT IN AUTO BALANCE MODE
please set ―ELE REV‖ in the ―Control Reverse‖ box. You should now see the correct servo
movement after ‗checking‘ the box.
RUDDER CHECK:
10. Holding the plane in your hands ―yaw the plane‖ from left to right. The rudder should give a
signal to counter the yaw motion as shown bleow:
11. If the rudder does not follow the correct movement, please set ―RUD REV‖ in the ―Control
Reverse‖ box. You should now see the correct servo movement after ‗checking‘ the box.
Throttle Detection:
12. Warning: It is recommended that you remove your prop or disable your motor while
performing these setup procedure.
13. Pleases refer to the throttle output at the servo display as shown to the right.
14. With your throttle at the lowest setting the number should read 1000. As your throttle up this
number should get larger.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 45
Page 47

GuiLin FeiYu Electronic Technology Co., Ltd.
Value set
Turning angle
30
50
(default)
70
60° Corresponding angle
18°
30°
42°
15. If instead the number reads 2000 and gets smaller as you increase the throttle then check the
―THR REV‖ in the ―Control reverse‖ box:
Flight Parameter Setting
1. The following will explains the function of each flight parameter
setting:
Aircraft Turn Control
2. Roll angle control: indicates the rate coefficient of turning
angle control.
The higher the value, the greater the turning angle in degrees.
This Parameter can be set in range from 0-99 degrees. The
maximum attitude angle during the turning procedure is 45 deg.
The Matrix below shows the relation between Parameter value
and angle of the plane during a turning procedure, with total
heading changed bigger than 60 degrees.
3. Roll integrator: Indicates the (side) angle correction between the designated Flight path and
the plane‘s current position. The higher the value, the faster the system will react to match
the actual flight path and the planned (designated) flight path. This Parameter will be
activated once the plane enters an area less than 30 meters from the planned flight route.
Range from 0 to 9, default value is 2.
4. Course damping: This is to counter the heading change by controlling the gain for angle
control. The higher the value, the greater the angle movement. Range from 0-99. Default
value: 50.
Height control
5. Pitch angle control: The higher the value, the higher the
pitch up or down of the aircraft nose. Maximum pitch up
setting is + 20 degrees.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 46
Page 48

GuiLin FeiYu Electronic Technology Co., Ltd.
Value set
Attitude up
30
50
(default)
70
10 m
6°
10°
14°
Maximum pitch down setting: - 20 degrees.
Range is 0 to 99. Default value: 50.
6. The following table shows Pitch angle control when the plane reaches 10 meter altitude:
7. Pitch Integrator: Also known as Attitude Deviation Integration. This setting controls the
gain to integrate the aircraft current altitude to the target altitude. The higher the value, the
greater the speed to match current and target altitude via pitch control.
Value Range: 0 to 9, Default value: 2
8. Height damping: Pitch control gain to counter aircraft altitude change. The higher the value,
the greater the pitch action.
Value Range: 0 to 99. Default value: 50.
Throttle Control
9. Speed control: This setting controls the aircraft speed in
reference to the GPS speed change. The higher the value, the
greater the throttle control gain.
Value Range: 0 to 99. Default value: 40.
10. Speed damping: This setting controls the throttle control gain to counter changes in
airspeed.
The higher the value, the greater the control will gain.
Value Range: 0 to 99. Default value: 40.
Route stability
Rudder Turn Control:
11. Side Offset Damping:
Adjust gain to control the change in Side Offset damping.
The bigger the value, the bigger the control gain.
Range: 0-9. Default value: 5
12. Rudder Turn Control:
When Selecting ―no mix (AIL&RUD NAV)‖or ―ELE and AIL mix (AIL&RUD NAV)‖ in
the Mix Control mode manual, the Parameter will be
effected.
in these Two control mode (―no mix (AIL&RUD NAV)‖and
―ELE and AIL mix (AIL&RUD NAV), the turning of the
plane is complete via both the Aileron and Rudder.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 47
Page 49

GuiLin FeiYu Electronic Technology Co., Ltd.
The ‗Rud Turn Control‘ adjusts the gain of the rudder during automated aircraft turning. This
gain is linearly proportional. i,e, the value should be adjusted according to the Rudder
sensitivity. If your Rudder control sensitivity is high this parameter value should be reduced,
and vice versa.
For all other mix-control modes, the turning is complete via aileron only. Therefore this
‗Rud Turn Control‘ parameter has no effect on the aircraft.
Range :0-99.Default value:60.
13. Rudder stability: Control gain to counter the rotation of Z Axis (perpendicular to the body
of the plane).The higher the value, the greater the control gain would be.
Range: 0-99. Default value: 20.
Stability Control
14. Pitch Stability: The amendment control gain given by the
change of the flight pitch angle .The higher of the setting, the
greater of the control gain. Setting Range: 0-99. Default value: 60.
15. Roll Stability: The amendment control gain given by the change of the flight roll angle .The
highger of the setting, the greater of the control gain. Setting Range: 0-99. Default value: 60.
Automatic take-off
16. You can select auto take-off by clicking the ―Auto Take Off‖ button on GCS software, the
plane will automatic climb to 50 meters, keep level flight, and then decide the next task
according to the current switch state of the CH5 and CH6.
17. You can cancel the auto take off at any time during the auto take-off procedure by clicking
the button.
18. Take-off pitch: Use this to adjust the Auto take-off pitch setting.
Setting Value Range: 0 to 40 Degrees
19. Take-off Speed: Ground speed setting during take-off.
Setting Range: 0 to 60 meters per second
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 48
Page 50

GuiLin FeiYu Electronic Technology Co., Ltd.
Vibration Detection and Adjustment
1. It is critical that the installation of the autopilot meets the vibration damping requirements.
2. If the installation does not meet the requirements it will affect the accuracy of the attitude
stabilization greatly.
3. Excessive vibration can cause unpredictable flight characteristics.
Vibration Damping Test Procedure:
1. Connect the power to the system
and switch ON the plane.
2. Move the Control Mode switch
to Auto Balance Mode.
3. Observe the attitude of the
autopilot screen and ensure that
the attitude shown is correct.
4. Slowly activate throttle and spin
the motor / propeller. Do not
take off!
5. Increase throttle and hold for 20 seconds at different increments.
6. Ensure that the pitch and roll indicators are moving properly and do not deviate.
7. During this throttle increment tests, observe your GCS Screen (above).
8. If the ―Attitude error" sign is activated as shown above, that means the system is expericing
excessive vibration and the autopilot cannot function properly.
9. Attitude error corresponds to 1000 attitude errors during the test process.
10. Check your installation. Provide additional vibration damping if necessary and restart the
test from the beginning.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 49
Page 51

Flight Path Setting
GuiLin FeiYu Electronic Technology Co., Ltd.
1. After the autopilot has attained a lock on the home position, a little red plane will show up on
the map at your current position.
2. Set the current location as return point (H. Point) if you wish.
3. To familiarize yourself with flight path setting, try a very simple autopilot flight plan first.
4. In this example, set a ―Box‖ pattern (above).
5. Ensure that the first tests are done well within visual sight of the plane.
6. When you are more confident with the system is working
properly, you can setup a more complicated flight path.
7. UPLD ROU – After setting the aircraft flight path, store the
flight route to the RAM of the Autopilot by clicking ―UPLD
ROU‖. This flight path will be lost when the autopilot is
powered off.
If you wish to save the flight path for a repeat flight), you can
click ―Route Permanents Storage‖. This will save route even after you power OFF the
autopilot.
Note that you can store only one route in the autopilot RAM at a time. When you save a new
flight route using ―Route Permanents Storage‖, the previous path will be replaced.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 50
Page 52

GuiLin FeiYu Electronic Technology Co., Ltd.
The Debugging of after Take Off
1. This debugging procedure is carried out while the plane is in the air.
2. To carry out this procedure, your plane should be set up well enough to fly straight without
constant correction when in manual mode.
3. Always check the Servo Autopilot Control carefully. For more details, please refers to
Servo Direction Setting.
4. Switch to ―Auto Balance Remote Control‖ check to see if there is any unusual movement of
the control and that the auto-balance is functioning properly.
5. Try rolling and ascending the plane, then let go of the sticks. Ensure the plane recovers by
itself in both pitch and roll. If it doesn‘t, adjust the ―pitching stability‖ and ―rolling stability‖
on the stability control and try again until you feel that the auto balance function is working
perfectly.
6. Pitch & Roll Stability: If the plane is pointed down and the
sticks are released, and you observe the plane returning to
level too slowly, you need to increase the pitch stability
control. Alternately, if the plane pitches up quickly resulting
in and up-down oscillation, then you need to decrease the pitching stability control. The same
is true for the roll, if the plane returns to level flight too slowly then increase the roll stability
control. If the plane rocks back and forth then you need to decrease the roll stability control.
7. After you have finished adjusting in the Auto Balance Mode, adjust the remote control trims
to fly level without input from you.
8. If the Neutral position in this Manual Mode (flight stabilization
de-activated) is different from Auto-balance Mode, then please
adjust the angle of installation for the AHRS Module on the
aircraft, so that the two are the same.
9. Alternately, you may use your transmitter trims to level the
plane in Auto Balance Mode. While flying in a straight line and
having no input through the transmitter sticks, click ―record
servo neutral‖. This saves the trim settings in Auto Balance
Mode.
10. Note: If the plane attitude is level and straight while in the Auto balance Mode, the Deviation
off Neutral position between Manual Mode (Stabilizer Off) and the Auto-Balance Mode
won‘t affect the GCS Auto Navigation.
Next test is "Automatic Navigation Mode". Test this mode only after you have reached a safe
flying altitude. In this mode, observe the auto navigation flying condition from the ground
station software, and adjust the automatic navigation parameters such as:
Turning Control Adjustment
Route Stability Adjustment
Throttle Control Adjustment and etc.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 51
Page 53

GuiLin FeiYu Electronic Technology Co., Ltd.
CA B
Increase Course damping.
If the plane rolled from side to side during turning, reduce Course damping.
A
B
C
C
A
B
Increase Roll angle control.
C
A
B
Decrease Roll angle control.
Turning control Adjustment. For Example: From Point A to
Point B and then to Point C.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 52
Page 54

GuiLin FeiYu Electronic Technology Co., Ltd.
BA
BAB
A B
A
Increase ―Side Offset damping‖ if plane fly like a ―Big S‖ pattern.
Decrease ―Side Offset damping‖ if plane fly in a ―Tight S‖ pattern.
Increase ―Roll integrator‖ if the plane roll to one side only.
Reduce the ―Roll integrator‖ if the plane repeatedly and quickly roll on both sides.
Route Stability Adjustment
1. ―Rudder Stability‖ is useful. It‘s used to improve the course stability during flying .
2. Notice: The plane will not fly in a straight line if the settings are too high. For an example,
flight path from A to B.
Rudder Turn Control for Heading Adjustment
For planes using Mix Control Mode - When working in the ―no mix
(AIL&RUD NAV)‖and―ELE and AIL mix (AIL&RUD NAV)
modes, the turning is controlled by the ailerons.
But after entering the planned flight route, the ailerons function will
change from turning to maintaining flight stabilization. At the
same time, the rudder will take over the function of heading
adjustment. Therefore, the heading adjustment gain (see right) using
‗Rud Turn Control‘ becomes very important.
If ―Rud Turn Control‖ is set too high, the plane will swing left and
right, making a tight S-route.
Whereas if ―Rud Turn Control‖ is set too low, the plane will not be able to follow (deviate) the
planned flight route.
So remember, if you are using either ―no mix (AIL&RUD NAV)‖and―ELE and AIL mix
(AIL&RUD NAV) modes, you need to adjust the control gain of ―Rud Turn Control‖.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 53
Page 55

GuiLin FeiYu Electronic Technology Co., Ltd.
B
ABABA
B
ABABA
If the plane climbs too slowly, increase the ―pitch angle control.‖
If the plane climbs too fast, reduce the ―pitch angle control.‖
Increase ―Height damping‖ if your plane flies in this pattern.
Decrease ―Height damping‖ if your plane flies in this pattern.
Increase ―Pitch integrator‖ if the plane flies higher or lower from your fixed altitude
Decrease ―Pitch integrator‖ when your plane flies in this pattern.
Additional Note: If your aircraft is normal / traditional fix-wing plane but uses both aileron AND
rudder to navigate, the above also applies. You need to set ―Rud Turn Control‖ to adjust heading
accuracy when following the planned flight route.
Altitude Control Adjustment
For an example, Altitude from A to B.
Throttle Control Adjustment
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 54
Page 56

GuiLin FeiYu Electronic Technology Co., Ltd.
Speed control: Sets the gain to maintain the actual aircraft speed and
the target speed. The higher the gain, the faster the aircraft will react
to changes in actual aircraft speed.
Speed damping: sets the amount of ‗buffer‘ for throttle change initiation. If there is a change in
flying speed, that change must exceed the damping value before throttle is reduced or increased.
Generally, you can change the above settings during cruise flight.
Warning: We suggest not to increase the settings too high, it may cause very unusual flying behavior
and may result in damage of your aircraft due to excessive throttling.
The normal setting is around 10-40.
Auto Take Off
1. The auto take-off feature is designed mainly for hand launched planes.
2. Please select a fairly stable plane if auto take-off is to be used.
3. The Auto Take-off should not be attempted unless you have completed setting up Auto
Balance mode and fill in the Navigation parameters.
4. Critical Parameter Examples:
Set the climb pitching angle for auto take-off.
Set the climbing Groundspeed for auto take-off
Set a return point and the altitude for return point (default is 200 meters).
Mission: Circle over home-point after auto take-off.
Auto take off procedure
1. After located by the GPS, click ―Auto take off‖ in the GCS.
2. When the menu button background color turn to green, set Channel 6 switch to the position
of ―Return to home‖
3. Set the throttle level to the position for taking off.
4. Throw out the plane in a level and straight way.
5. You will notice the plane will fly in a straight line first.
6. When the autopilot detects groundspeed has increased at a value needed for climbing, the
plane will climb up to approximately 50m altitude.
7. Upon reaching 50 meter altitude, the auto take off Procedure is over. Control is automatically
transferred back to your RC transmitter.
8. However, the plane will still continue flying autonomously, gradually circling and increasing
height to 200 meters over the home-point. At this height, the aircraft will hold altitude.
9. Remember that if you had done any adjustments to the Flight Parameters (e.g. Pitch and Roll
stability), remember to click ―Permanents storage‖ to store your settings in the Autopilot
RAM. Failure to save these settings before powering OFF will result in lost of all
adjustments done.
This manual is just a guideline to help you set up your aircraft for autonomous flight.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 55
Page 57

GuiLin FeiYu Electronic Technology Co., Ltd.
As each aircraft is unique, you will need to fine tune the settings to suit your aircraft’s flight
characteristics.
----END---
Note: We reserve the right to change this manual at any time! And the newest edition will be shown on our
website www.feiyudz.cn.
GuiLin FeiYu Electronic Technology Co., Ltd http://www.feiyudz.cn E-mail: service@feiyu-tech.com
Page 56
 Loading...
Loading...