


MEC 20
CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE
(AVEC OPTIONS DE DISPOSITIF DE COMMUNICATION À DISTANCE, DE MODULE DE SORTIE D’EXPANSION ET D’ANNONCIATEUR À DISTANCE EAP110)
MANUEL D’INSTALLATION,
DE FONCTIONNEMENT ET D’ENTRETIEN
Version logicielle 1.82
PM047F REV 13 05/03/30
9087A – 198th Street Langley (C.B.) V1M 3B1, Canada |
No de tél. : (604) 888-0110 |
No de téléc. : (604) 888-3381 Courriel : info@thomsontechnology.com |
Site Internet : www.thomsontechnology.com |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
TABLE DES MATIÈRES
1. |
INTRODUCTION |
1 |
|
|
1.1. HISTORIQUE DE RÉVISION DU PRODUIT |
1 |
|
|
1.2. |
DESCRIPTION GÉNÉRALE |
4 |
2. |
INSTALLATION |
6 |
|
|
2.1. |
RENSEIGNEMENTS GÉNÉRAUX |
6 |
|
2.2. ENTRÉE D’ALIMENTATION DE BATTERIE |
6 |
|
|
2.3. ENTRÉE DE DÉTECTION DE VITESSE |
7 |
|
|
2.4. ENTRÉES DE TENSION C.C. |
7 |
|
|
2.5. ENTRÉE DE TENSION C.A. |
8 |
|
|
2.6. |
ENTRÉE DE C.A. |
9 |
|
2.7. |
SORTIES |
9 |
|
2.8. CÂBLAGE DU PANNEAU DE CONTRÔLE EXTERNE |
10 |
|
2.9.CÂBLAGE SUR LE TERRAIN DES CONTACTS DE MISE EN MARCHE À DISTANCE 10
2.10. CÂBLAGE DE COMMUNICATION À DISTANCE |
11 |
2.11. EMPLACEMENT ET INSTALLATION DU MODULE DE SORTIE D’EXPANSION |
11 |
2.12. EMPLACEMENT ET INSTALLATION DU MEC 20 |
12 |
2.13. DIMENSIONS DE MONTAGE DE LA PLAQUE FRONTALE |
14 |
2.14. ASSEMBLAGE DU MEC 20 – VUE LATÉRALE |
15 |
2.15. ESSAI DIÉLECTRIQUE |
16 |
PM047F REV 13 05/03/30 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
3. |
DESCRIPTION |
17 |
|
|
3.1. |
PLAQUE FRONTALE LEXAN |
17 |
|
3.2. PLAQUETTE DE CIRCUITS IMPRIMÉS |
19 |
|
4. |
DESCRIPTION DES CIRCUITS DE DÉTECTION DE DÉFAILLANCE |
21 |
|
|
4.1. SCHÉMA FONCTIONNEL DU MEC 20 |
22 |
|
|
4.2. CIRCUITS DE DÉTECTION DE DÉFAILLANCE INTERNES |
23 |
|
|
4.3. CIRCUITS DE DÉTECTION DE DÉFAILLANCE D’ENTRÉE NUMÉRIQUE |
24 |
|
|
4.4. CIRCUIT DE DÉTECTION DE DÉFAILLANCE D’ENTRÉE ANALOGIQUE |
27 |
|
5. |
DESCRIPTION DES CONTACTS DE SORTIE DE CONTRÔLE |
33 |
|
|
5.1. CONTACTS DE SORTIE, DE MARCHE, DE DÉMARRAGE ET DE PANNE COMMUNE |
||
|
|
33 |
|
|
5.2. CONTACTS DE SORTIES PROGRAMMABLES |
34 |
|
6. |
OPTION DE DISPOSITIF DE COMMUNICATION À DISTANCE |
39 |
|
7. |
OPTION DE MODULE DE SORTIE D’EXPANSION |
43 |
|
8. |
OPTION D’ANNONCIATEUR À DISTANCE EAP 110 |
46 |
|
9. |
DIRECTIVES DE FONCTIONNEMENT |
47 |
|
|
9.1. PROCÉDURE DE MISE SOUS TENSION DU MEC 20 |
47 |
|
|
9.2. MENUS D’AFFICHAGE DU MEC 20 |
47 |
|
|
9.3. |
SUITE DES OPÉRATIONS |
55 |
|
9.4. |
BOUTONS-POUSSOIRS DE CONTRÔLE |
62 |
PM047F REV 13 05/03/30 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
10. |
DIRECTIVES DE PROGRAMMATION |
64 |
10.1. |
CODES D’ACCÈS |
64 |
10.2. OPÉRATIONS DE PROGRAMMATION DE BASE |
66 |
|
10.3. MENU DE PROGRAMMATION PRINCIPAL |
67 |
|
10.4. MENU DE PROGRAMMATION DES DÉFAILLANCES ANALOGIQUES |
76 |
|
10.5. MENU DE PROGRAMMATION DES DÉFAILLANCES NUMÉRIQUES |
77 |
|
10.6. |
MENU D’ÉTALONNAGE |
81 |
11. |
FEUILLES DE PROGRAMMATION |
93 |
11.1. RÉSUMÉ DES DONNÉES DE CONFIGURATION |
93 |
|
11.2. |
CONFIGURATION PRINCIPALE |
94 |
11.3. MENU DE PROGRAMMATION DES DÉFAILLANCES ANALOGIQUES |
99 |
|
11.4. MENU DE PROGRAMMATION DES DÉFAILLANCES NUMÉRIQUES |
100 |
|
11.5. |
MENU D’ÉTALONNAGE |
101 |
12. |
SPÉCIFICATIONS |
103 |
13. |
DIAGRAMME DE CONNEXION |
105 |
14. |
GUIDE DE DÉPANNAGE |
106 |
15. |
NOTES |
109 |
PM047F REV 13 05/03/30 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
1.INTRODUCTION
1.1.HISTORIQUE DE RÉVISION DU PRODUIT
Vous trouverez ci-dessous un résumé des modifications apportées au produit depuis sa version originale.
Versions du logiciel
1.82 05/03/30 |
Révision de la logique de commande de ralenti pour les entrées |
|
numériques no 1 et 2. |
|
Augmentation de la limite supérieure de l’arrêt analogique haute |
|
température. |
1.81 03/03/04 |
Changement du fabricant de capteur de pression d’huile |
|
nécessitant la révision des données de calibration sur la |
|
résistance à la pression. |
|
Nouveau capteur de pression d’huile Thomson, no de pièce |
|
003654, Fabricant - Datcon, no de pièce 102227 |
|
Capteur de pression d’huile Thomson suspendu, no de pièce |
|
000772, Fabricant - Isspro, no de pièce R9279C |
|
Remarque : Les capteurs de pression d’huile ne sont pas |
|
interchangeables avec les versions des logiciels. |
1.8 02/09/09 |
Ajout de la caractéristique de sortie programmable « Charge |
|
|
|
d’alimentation EPS » |
|
Ajout de la caractéristique d’entrée numérique « Essai à vide » |
|
Ajout de nouveaux noms de défaillance numérique |
|
Rupture du bassin |
|
Commutateur de transfert en dérivation |
|
Fuite d’essence |
|
Défaillance du régulateur d’aération |
|
Niveau d’essence élevé |
|
Basse pression d’essence |
|
Défaillance du chargeur de batterie |
|
Défaillance de synchronisation |
|
Température élevée du collecteur d’admission |
|
Ajout de caractéristiques de programmation indépendantes |
|
pour les sorties PSA |
|
Ajout de références pour l’annonciateur à distance EAP 110 |
|
Modifications diverses de l’affichage et du menu |
PM047F REV 13 05/03/30 |
1 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
1.7 02/02/15 |
Principales modifications apportées : |
|
• Logique de panne de secteur automatique avec nouvelles |
|
minuteries, nouvelles sorties de contrôle et nouvelles |
|
caractéristiques d’affichage. |
|
• Affichage de la tension c.a. entre ligne et neutre sur les |
|
systèmes triphasés à quatre câbles (connexion neutre exigée). |
|
• Fonction d’arrêt analogique sur les capteurs de pression d’huile |
|
et de température. |
|
• Fonctionnement de la pression d’huile allant maintenant jusqu’à |
|
150 lb/po2 (allait jusqu’à 100 lb/po2 auparavant). |
|
• Étalonnage ponctuel pour les entrées de capteur de pression |
|
d’huile et de température du moteur (un étalonnage sur le |
|
terrain simplifié est maintenant obligatoire). |
|
• Fonctions de sortie programmable permettant maintenant le |
|
mappage de chaque circuit de détection de défaillance |
|
disponible. |
|
• Ajout des nouvelles caractéristiques de sortie programmable |
|
« Moteur prêt » et « Alimentation du moteur (essence) ». |
|
Des modifications mineures ont également été apportées et sont |
|
indiquées dans le manuel. |
|
|
1.6 01/07/18 |
Ajout d’une sortie programmable « Prêt pour charge » et de |
|
nouvelles courbes de capteur de pression d’huile Isspro; |
|
amélioration des fonctions de détection de défaillances numériques |
|
et analogiques. |
|
|
1.5 00/09/20 |
Ajout de l’option de mesure en kVA. |
|
|
1.4 99/12/09 |
Ajout de nouvelles étiquettes pour les défaillances numériques et |
|
de fonctions programmables. |
|
|
1.3 98/02/09 |
Nouvelle version avec fonctions de communication, fonction de |
|
module de relais d’expansion, suppression des fonctions de |
|
programmation d’alarmes, d’arrêt du refroidissement et de panne |
|
commune ainsi que révision du mot de passe. |
|
|
PM047F REV 13 05/03/30 |
2 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
1.2 97/06/04 |
Version originale. |
|
|
Versions du manuel de fonctionnement et d’entretien
Rev 13 05/03/30 |
Ajout de renseignements descriptifs sur la nouvelle version 1.82 du |
|
logiciel. |
|
|
Rev 12 03/03/04 |
Changement des données sur l’étalonnage de la pression d’huile et |
|
de la résistance et nouvelle version 1.81 du logiciel. |
|
|
Rév. 11 02/09/09 |
Ajout de renseignements descriptifs pour la nouvelle version 1.8 du |
|
logiciel |
|
|
Rév. 10 02/02/15 |
Ajout de renseignements descriptifs pour la nouvelle version 1.7 du |
|
logiciel |
|
|
Rév. 9 01/10/17 |
Précision des défaillances exigées pour les normes C282 ou |
|
NFPA 110. |
|
|
Rév. 8 01/07/18 |
Ajout de précautions antistatiques; remplacement des cavaliers |
|
d’étalonnage par des résistances d’étalonnage externes ou des |
|
potentiomètres; augmentation du nombre de circuits de détection |
|
de défaillances de série de 12 à 28; modification du statut « Prêt » |
|
par le statut « Prêt pour charge »; modification des températures et |
|
des pressions d’étalonnage; accroissement de la gamme de |
|
températures. |
|
|
Rév. 7 00/12/01 |
Modification mineure du texte. |
|
|
Rév. 6 00/10/06 |
Ajout de l’option de mesure en kVA. |
|
|
Rév. 5 00/04/06 |
Modification des étiquettes de défaillances numériques. |
|
|
Rév. 4 99/02/01 |
Modification relative au câblage du dispositif de communication à |
|
distance, modification du nombre de contrôleurs pouvant être |
|
connectés de 5 à 10. |
|
|
Rév. 3 98/05/08 |
Correction d’erreurs mineures. |
|
|
Rév. 2 98/02/18 |
Nouvelle version avec fonctions de communication, fonction de |
|
|
PM047F REV 13 05/03/30 |
3 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
|
module de relais d’expansion et révision du mot de passe. |
|
|
Rév. 1 98/01/22 |
Correction d’erreurs mineures. |
|
|
Rev 0 97/06/04 |
Version originale. |
|
|
Communiquez avec Thomson Technology pour obtenir les manuels applicables. Une version électronique de la version la plus à jour du manuel est offerte sur le site www.thomsontechnology.com.
1.2.DESCRIPTION GÉNÉRALE
Le contrôleur à microprocesseur pour groupe électrogène MEC 20 de Thomson Technology utilise la toute dernière technologie en matière de conception de microprocesseurs afin d’assurer le contrôle et la surveillance de groupes électrogènes. Le MEC 20 offre une gamme polyvalente de caractéristiques de fonctionnement, de protection et d’affichage pour le contrôle automatique d’un groupe électrogène. Toutes les caractéristiques de série et en option du MEC 20 peuvent être entièrement configurées à partir du dispositif d’affichage à cristaux liquides du panneau avant et sont protégées par un code d’accès. Les messages du dispositif d’affichage à cristaux liquides sont en anglais simple et ils font partie d’une interface facile à utiliser, laquelle comprend de nombreuses options d’affichage. La conception du microprocesseur permet d’obtenir une exactitude élevée dans le cadre de la surveillance de la tension et du courant, de même que pour les fonctions de minutage. Le microprocesseur comprend également de nombreuses caractéristiques de série qui étaient auparavant offertes uniquement sous forme d’options dispendieuses.
Le MEC 20 comprend les caractéristiques de pointe suivantes :
•Jusqu’à 28 circuits d’alarme et d’arrêt en cas de défaillance utilisant des entrées analogiques et numériques.
•Modèle de série conforme ou supérieur aux exigences de la norme C282 de la CSA et de la norme 110 de niveau 1 de la NFPA, en matière de contrôle de groupes électrogènes.
•Port de communication à distance RS 422.
•Module de sortie d’expansion (port de communication) permettant l’utilisation de contacts de défaillance individualisés.
•Écran d’affichage à cristaux liquides éclairé par l’arrière avec indicateur alphanumérique pour l’affichage et la programmation.
PM047F REV 13 05/03/30 |
4 |
Thomson Technology |
CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
•Affichage numérique triphasé des tensions, des kilovoltampères, des courants et de la fréquence à la sortie du générateur.
•Mémoire permanente enregistrant les données et points de consigne en cas de panne de l’alimentation de contrôle.
•Entrées de détection de tension triphasée pour l’alimentation du générateur, de 120 V.c.a à 600 V.c.a. (nominal).
•Niveaux de programmation protégés par un code d’accès.
•Dispositifs d’autodiagnostic vérifiant continuellement le fonctionnement, les entrées/sorties ainsi que les circuits de mémoire.
•Excellente immunité aux bruits de brouillage électromagnétique et radioélectrique et dispositif de contrôle de la surtension, conformément aux exigences de la norme C62-41 de l’IEEE.
•Conception à double microprocesseur avec circuits de détection de vitesse indépendants offrant un meilleur rendement.
CAUTION
contents subject to damage by
STATIC ELECTRICITY
Ce matériel contient des pièces sensibles à la statique. Veuillez respecter les précautions antistatiques indiquées ci-après chaque fois que vous manipulez ce matériel. Tout manquement à ces précautions peut entraîner des défectuosités ou endommager le matériel.
•Décharger la charge électrostatique du corps avant de manipuler le matériel (contacter une surface mise à la terre et maintenir le contact pendant la manipulation du matériel; un bracelet antistatique mis à la terre devrait également être utilisé).
•Ne pas toucher aux composants de la plaquette de circuits imprimés avec les mains ou avec tout autre matériel conducteur.
•Ne pas placer le matériel sur des matières telles que le styromousse, le plastique et le vinyle ou près de ces matières. Placer le matériel sur des surfaces mises à la terre et utiliser un sac antistatique seulement pour le transporter.
PM047F REV 13 05/03/30 |
5 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
2.INSTALLATION
2.1. RENSEIGNEMENTS GÉNÉRAUX
REMARQUE :
L’installation doit être effectuée conformément à tous les codes de réglementation électrique applicables.
Les directives d’installation suivantes constituent des renseignements généraux se rapportant à des exemples d’installation typiques. Pour obtenir des renseignements sur des sites d’installation spécifiques, consulter Thomson Technology au besoin. Remarque : L’installation en usine de panneaux de contrôle THOMSON TECHNOLOGY ayant subi des essais et ayant été éprouvés peut différer de ces recommandations.
AVERTISSEMENT
L’installation et (ou) l’entretien doivent être effectués uniquement par du personnel qualifié. Tout manquement à ces directives peut provoquer des blessures ou la mort.
2.2.ENTRÉE D’ALIMENTATION DE BATTERIE
Le MEC 20 peut être alimenté par n’importe quelle batterie de 10 V.c.c. à 30 V.c.c. Le conducteur négatif ou commun à c.c. de la batterie doit être connecté à la masse principale du groupe électrogène. Le MEC 20 est protégé intérieurement par un fusible à semi-conducteur qui offre une protection contre les courts-circuits imprévus des bornes de sortie. Le fusible à semi-conducteur se réenclenche automatiquement lorsque la condition de surintensité disparaît. Le câblage reliant la batterie de démarrage du moteur au panneau de contrôle doit être conforme aux directives
suivantes afin d’éviter toute défaillance et (ou) tout bris du contrôleur.
2.2.1Ne pas câbler à partir des bornes du démarreur. Le câblage doit partir des bornes de la batterie et être relié directement au panneau de contrôle du moteur, afin d’éviter les chutes de tension dans les câbles du démarreur et les bruits du collecteur du démarreur. Remarque : Les panneaux de contrôle montés sur unité dotés de câblage court peuvent être connectés aux bornes du démarreur, pourvu que l’application spécifique réussisse un essai.
PM047F REV 13 05/03/30 |
6 |
Thomson Technology |
CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
AVERTISSEMENT
Le chargeur de la batterie doit être arrêté avant que les câbles de la batterie en soient retirés (p. ex. pour l’entretien). Tout manquement à ces directives peut soumettre le panneau de contrôle à une surtension qui pourrait l’endommager.
2.2.2Le câblage reliant la batterie au panneau de contrôle du moteur doit être constitué de deux câbles de calibre 14 AWG (2,5 mm2). Par exemple, éviter d’utiliser le bloc moteur comme conducteur commun.
2.2.3Dans les environnements bruyants, tels que ceux des moteurs au gaz avec allumage à haute tension, le câblage de la batterie doit être effectué avec un câble à paire torsadée de calibre 14 AWG (2,5 mm2).
2.3.ENTRÉE DE DÉTECTION DE VITESSE
Le câblage sur le terrain des câbles du signal de détection de vitesse doit être conforme aux directives suivantes afin d’éviter toute défaillance et (ou) tout bris du contrôleur.
2.3.1.On doit utiliser une paire torsadée/blindée à deux conducteurs pour le câblage du capteur magnétique. Le blindage doit être connecté uniquement à l’extrémité du panneau de contrôle.
2.3.2.La tension du capteur magnétique doit être supérieure à 3 V.c.a. à vitesse de démarrage et elle doit se situer entre 3 V.c.a. et 5 V.c.a. à vitesse nominale.
2.3.3.On recommande d’utiliser un capteur magnétique exclusivement pour la connexion aux bornes d’entrée de détection de vitesse. Remarque : On peut utiliser un capteur magnétique commun pour le système, pourvu que des essais soient effectués avec le matériel en place. Par exemple, les niveaux de tension du capteur magnétique doivent correspondre aux niveaux requis.
2.4.ENTRÉES DE TENSION C.C.
Toutes les entrées de tension c.c. reliées au MEC 20 sont optiquement isolées et filtrées de façon à être protégées des impulsions parasites. Le câblage d’entrée transitoire doit être acheminé de manière à être à l’écart des circuits électriques « bruyants », comme les câbles d’allumage ou de démarrage ou les principaux conducteurs de courant c.a. Tous les contacts doivent être secs et une extrémité du câble doit être connectée au conducteur négatif commun à c.c.
PM047F REV 13 05/03/30 |
7 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
2.5.ENTRÉE DE TENSION C.A.
Le MEC 20 accepte les entrées de tension c.a. entre 120 V.c.a. et 600 V.c.a. (nominal). Remarque : Les circuits de détection de tension d’entrée directs ne peuvent être employés que lorsque le générateur utilise un système de distribution monophasé à trois câbles ou un système de distribution triphasé à quatre câbles muni d’un conducteur neutre solidement mis à la terre. Pour les systèmes triphasés à trois câbles ou pour les systèmes à tension élevée, utiliser des transformateurs de potentiel. Consulter les FIGURES 1 à 4 pour obtenir de plus amples renseignements sur les connexions des circuits de détection de tension. Pour pouvoir afficher la tension entre ligne et neutre du générateur dans un système triphasé à quatre câbles, le neutre doit être connecté tel qu’illustré ci-dessous.
MEC 20 |
A B C N |
MEC 20 |
L1 L2 |
N |
VA |
|
VB |
|
VC |
|
VN |
Aucune |
|
|
TERRE |
connexion |
|
|
|
TERRE |
ENTRÉES DE TENSION
600V.C.A. L-L, 347V.C.A. L-N |
A |
B |
C |
380V.C.A. L-L, 220V.C.A. L-N |
|
|
|
480V.C.A. L-L, 277V.C.A. L-N |
|
|
N |
208V.C.A. L-L, 120V.C.A. L-N |
|
GÉN |
|
|
|
|
VA
VB
VC Aucune connexion
VN
TERRE
TERRE
ENTRÉES DE TENSION
240V.C.A. L-L, 120V.C.A L-N Remarque : Les tensions L1- N et L2-N doivent être de 120
 V.c.a. . (Les générateurs TERRE montés en triangle requièrent
V.c.a. . (Les générateurs TERRE montés en triangle requièrent
un transformateur de potentiel (TP) comme l'illustre la figure 3. Aucun TP n'est requis pour la phase C.
L1 L2
GÉN |
N |
TERRE |
FIGURE 1
SYSTÈME 208/380/480/680 V.C.A., 3 Ø, 4 F AVEC NEUTRE SOLIDEMENT MIS À LA TERREET RACCORD DIRECT,
MEC 20 |
A |
B |
C |
N |
|
VA |
|
|
|
|
|
|
120 |
|
|
|
|
VB |
|
|
|
|
|
|
120 |
|
|
|
|
VC |
|
|
|
|
|
VN |
120 |
|
|
|
|
|
|
|
|
|
|
|
Aucune |
|
|
|
|
TERRE |
Connexion |
|
|
|
|
|
TERRE |
|
|
|
|
|
|
|
|
|
|
|
TERRE |
|
|
|
|
TENSION DU TP |
|
B |
|
|
|
SECONDAIRE |
|
A |
C |
|
|
208V.C.A. L-L, 120V.C.A.C L-N 120V.C.A. L-L, 69V.C.A. L-N
N
GÉN
FIGURE 3
3 TP EN Y, 3Ø, 4F
FIGURE 2
SYSTÈME 208/380/480/680 V.C.A., 3 Ø, 4 F AVEC NEUTR E SOLIDEMENT MIS À LA TERREET RACCORD DIRECT,
MEC 20 |
|
A |
B |
C |
VA |
|
|
|
|
VB |
|
120 |
|
|
VC TERRE |
120 |
|
|
|
VN |
Aucune |
|
|
|
|
|
|
||
TERRE |
connexion |
|
|
|
|
|
|
|
|
|
TERRE |
|
|
|
TENSION DU TP |
|
B |
|
|
SECONDAIRE |
|
A |
C |
|
120V.C.A L-L
(PAS DE NEUTRE)
N
GÉN
FIGURE 4
TP MONTÉ EN TRIANGLE, 3 Ø, 3 F
G:\ENGINEER\PRODUCTS\MEC20\MEC20_08.VSD REV. 1 98/01/08
PM047F REV 13 05/03/30 |
8 |
Thomson Technology |
CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
2.6.ENTRÉE DE C.A.
On doit utiliser des transformateurs de courant pour alimenter les entrées de courant du MEC 20. La polarité des transformateurs de courant n’est pas indispensable au fonctionnement adéquat des circuits. Remarque : Les conducteurs communs secondaires du transformateur de courant doivent être mis à la terre à l’externe afin de fonctionner adéquatement. Les transformateurs de courant doivent posséder une capacité d’au moins 1,5 VA à la précision requise.
AVERTISSEMENT
Lors de l’installation ou de l’entretien des circuits des transformateurs de courant, toujours mettre le système hors tension avant de procéder aux travaux. Ne jamais ouvrir les circuits d’un transformateur de courant sous tension, sous risque d’être soumis à des tensions extrêmement élevées qui pourraient provoquer des blessures graves ou la mort.
2.7.SORTIES
Toutes les sorties du MEC 20 proviennent de contacts de relais. Ils possèdent une capacité (charge résistive) de 10 A à 240 V.c.a. ( 3 A à 0,4 pF inductif) et un calibre de 8 A à 24 V.c.c. Ils sont isolés, de forme A et C. Il est recommandé d’installer des relais d’interposition entre les sorties du MEC 20 et les dispositifs externes afin de prévenir les dommages internes causés par les appels de courant excessifs et (ou) les dommages en cas de défaillance externe. Remarque : Ces sorties requièrent une protection contre les conditions de surintensité extérieures (10 A maximum).
L’utilisation de solénoïdes à c.a. ou à c.c. ou l’utilisation de relais dans les systèmes de contrôle peut parfois causer des pointes de tension élevée dans l’alimentation en c.c., provoquant ainsi la défaillance des dispositifs électroniques. Il est recommandé d’utiliser des limiteurs de surtensions pour tous les appareils inductifs qui partagent le même câblage ou qui sont situés à proximité des panneaux de contrôle du groupe électrogène. Utiliser une diode à force contre-électromotrice de calibre convenable pour les relais ou les solénoïdes à c.c. Utiliser un varsitor à oxyde de métal ou un suppresseur à capacité-résistance de calibre convenable pour les relais ou les solénoïdes à c.a.
PM047F REV 13 05/03/30 |
9 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
2.8.CÂBLAGE DU PANNEAU DE CONTRÔLE EXTERNE
Le câblage du panneau de contrôle doit au minimum être conforme à la réglementation locale en matière d’installations électriques. Voici le calibre des câbles spécifiques
requis pour des circuits typiques (distance d’au plus 30 m (100 pi) ) :
2.8.1 |
Alimentation de contrôle de la batterie |
Calibre 14 AWG (2,5 mm2) |
2.8.2 |
Contacts d’alarme et d’arrêt du moteur |
Calibre 16 AWG (1,5 mm2) |
2.8.3Contact de mise en marche à distance
pour le commutateur de transfert
2.8.4 Câblage de la sortie de démarrage et de préchauffage
2.8.5 Câblage de détection de vitesse blindé à deux
2.8.6 Entrées de mesure de tension
2.8.7 Entrées de mesure de courant (à partir des transformateurs de courant)
Communiquer avec THOMSON TECHNOLOGY pour les distances supérieures à 30 m (100 pi).
Il est possible de diminuer la taille des câbles d’un échelon pour les panneaux de contrôle montés sur une unité.
2.9.CÂBLAGE SUR LE TERRAIN DES CONTACTS DE MISE EN MARCHE À DISTANCE
Le câblage sur le terrain reliant un contact de mise en marche à distance, d’un commutateur de transfert au panneau de contrôle, doit être effectué conformément aux directives suivantes afin d’éviter toute défaillance et (ou) bris du contrôleur.
2.9.1 Les câbles du contact de mise en marche à distance (2 câbles de calibre 14 AWG (2,5 mm2) doivent passer par un conduit séparé.
2.9.2Éviter de faire passer le câblage près de câbles de puissance c.a. afin de prévenir le captage de tensions induites.
2.9.3Il peut être nécessaire d’installer un relais d’interposition si la distance de câblage sur le terrain est trop importante (p. ex. : supérieure à 30 m (100 pi) et (ou) si le contact à distance possède une résistance de plus de 5,0 ohms.
2.9.4Le contact de mise en marche à distance ne doit comporter aucune tension (contact sec). L’utilisation d’un contact comportant une tension endommage le contrôleur.
PM047F REV 13 05/03/30 |
10 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
2.10.CÂBLAGE DE COMMUNICATION À DISTANCE
Le câblage d’interconnexion entre le contrôleur à microprocesseur pour groupe électrogène MEC 20 et le port de communication doit être effectué avec une paire torsadée blindée à 8 conducteurs d’un calibre minimum de 22 AWG et avec des connecteurs RJ45. Le blindage ne doit être raccordé que du côté du contrôleur MEC 20. Consulter le Section 6 de ce manuel pour obtenir de plus amples renseignements à ce sujet.
On doit acheminer adéquatement le câblage de communication du port du contrôleur de manière à le protéger contre les sources d’interférence électrique. Voici les directives de protection contre les interférences électriques :
•Utiliser un câble blindé à 8 conducteurs d’excellente qualité et connecter le blindage à la masse au contrôleur seulement.
•Acheminer le câble de communication à au moins 3 m (10 pi) de toute source de bruits électriques, comme les entraînements de moteur à vitesse variable, les conducteurs à alimentation haute tension, les systèmes d’alimentation sans coupure, les transformateurs, les redresseurs, etc.
•Utiliser des courses de conduits distinctes et spécialisées pour tous les câbles de communication. Ne pas mettre les câbles en faisceau serré à l’intérieur du conduit. Les conduits doivent être de type ferromagnétique lorsqu’ils passent près de sources éventuelles d’interférences électriques. Les conduits doivent être mis à la terre sur toute leur longueur.
•Lorsque les câbles de communication croisent des conducteurs c.a. à tension basse ou élevée, ils doivent le faire à angle droit, et non en parallèle.
Pour obtenir de plus amples renseignements sur la protection contre les interférences électriques, veuillez communiquer avec THOMSON TECHNOLOGY.
2.11.EMPLACEMENT ET INSTALLATION DU MODULE DE SORTIE D’EXPANSION
Les modules d’expansion doivent être montés à l’intérieur d’un panneau de contrôle à l’aide des vis et des dispositifs d’espacement fournis. Le module d’expansion doit être installé à une distance de câblage d’au plus 300 m (1000 pi) du MEC 20 à l’aide de l’un des câbles blindés à 8 conducteurs fournis avec le module. Les câbles de communication ne doivent pas être mis en faisceau avec les autres câbles de contrôle à
PM047F REV 13 05/03/30 |
11 |
Thomson Technology |
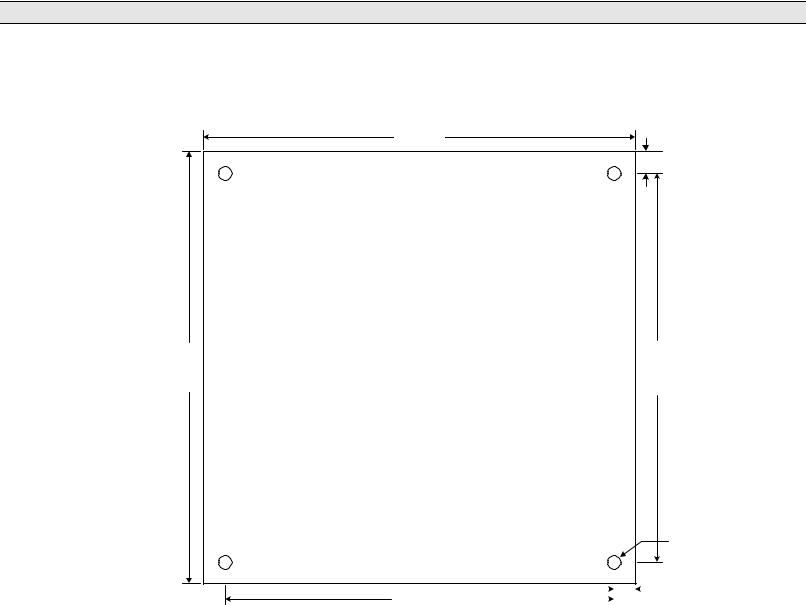
CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
l’intérieur du panneau. Les dimensions de montage du module de sortie d’expansion sont illustrées à la FIGURE 5.
0,00 mm
152,4 mm
7,62 mm
|
|
137,16 mm |
152,4 mm |
||
|
4 TROUS
4,75 MM
DE DIAMÈTRE
(FORET DE 3/16 PO)
|
7,62 mm |
|
|
|
|
|
0,00 mm |
|
|
|
|
|
|||||
137,16 mm |
||||||||
|
|
|
||||||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
FIGURE 5 : DIMENSIONS DE MONTAGE DU MODULE D'EXPANSION DU MEC 20
G:\ENGINEER\PRODUCTS\MEC20\MEC20_14.VSD ÉCHELLE : 75:1
2.12.EMPLACEMENT ET INSTALLATION DU MEC 20
Le contrôleur à microprocesseur pour groupe électrogène MEC 20 est conçu pour être monté directement sur une porte de panneau de contrôle. Porter une attention particulière aux points suivants :
•Le contrôleur doit être installé dans un endroit propre et sec, à l’abri de toute source de chaleur extrême.
PM047F REV 13 05/03/30 |
12 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
•Le fenêtre du dispositif d’affichage à cristaux liquides doit être installée à la hauteur convenant le mieux à la lecture.
•Il faut laisser suffisamment d’espace pour les câbles de contrôle à l’arrière de la plaquette de circuits du MEC 20.
•S’assurer que l’entrée de tension c.a. prévue pour le contrôleur n’excède pas le niveau maximum admissible inscrit sur la porte du panneau de contrôle, conformément aux normes d’homologation du panneau de contrôle applicables.
Le MEC 20 peut être installé sur une porte de panneau de contrôle selon l’une des méthodes suivantes :
•La première méthode nécessite un découpage spécial de la porte pour l’écran d’affichage à cristaux liquides et les diodes électroluminescentes (DEL), comme l’illustre la FIGURE 6. Dans cette méthode de montage, on monte la plaque frontale Lexan directement sur la porte du panneau de contrôle. Il faut démonter le contrôleur afin de monter la plaque sur la porte, puis ensuite le remonter. Consulter la FIGURE 7 pour connaître les emplacements d’assemblage de toutes les pièces.
•La seconde méthode de montage du contrôleur nécessite un adaptateur pour plaque frontale usiné, comme l’illustre la FIGURE 8. Cette méthode nécessite uniquement le découpage d’un grand trou rectangulaire dans la porte, comme l’illustre la FIGURE 9.
PM047F REV 13 05/03/30 |
13 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
2.13. DIMENSIONS DE MONTAGE DE LA PLAQUE FRONTALE
268 mm
C HAUT
 126 mm
126 mm
 126 mm
126 mm
9 TROUS
 80 mm
80 mm 6 mm. DE DIAMÈTRE
6 mm. DE DIAMÈTRE
(FORET DE 1/4 PO)
mm |
DÉCOUPAGE |
|
32 |
||
|
|
|
|
|
|
20mm |
||
mm |
|
C |
|
|
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
||
166 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 mm. |
|
|
|
8 mm. |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
LIMITES DE LA PLAQUETTE DE |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
24 mm |
|
|
|
|
24 mm |
|
|
|
||||
|
|
|
|
|
||||||||||||
CIRCUITS IMPRIMÉS SOUS LE PANNEAU DE LA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
PORTE |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G\ENGINEER\PRODUCTS\MEC20_07.VSD |
|
|
49 mm |
|
|
|
|
|
|
|
|
49 mm |
||||
|
|
|
|
|
|
|
|
|
||||||||
FIGURE 6
75 mm
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
41 mm |
|||
mm |
|||||||||
33 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 mm.
16,5 mm.
75 mm
4 TROUS
4 mm. DE DIAMÈTRE (FORET DE 3/16 PO)
PM047F REV 13 05/03/30 |
14 |
Thomson Technology |
CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
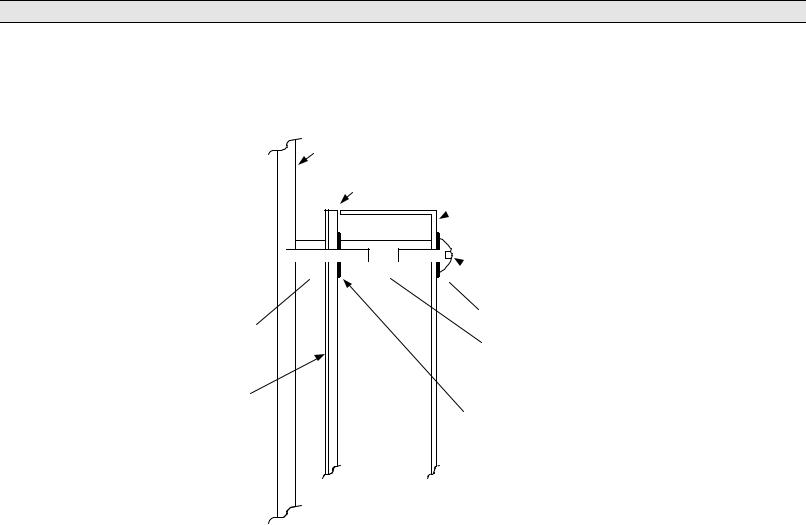
2.14. ASSEMBLAGE DU MEC 20 – VUE LATÉRALE
MEC 20 ASSEMBLY – SIDE VIEW
AVANT
PORTE DU PANNEAU |
ARRIÈRE |
PCI DU MEC 20
 COUVERCLE ARRIÈRE DU MEC 20
COUVERCLE ARRIÈRE DU MEC 20
GOUJON PEM 

 NO 8-32, 1 PO
NO 8-32, 1 PO 



BUTÉE D'ESPACEMENT EN
NYLON DE 1/2 PO (NO 8-32,
JEU NON FILETÉ
CLOISON ISOLANTE EN MYLAR (Montée sur le coin arrière droit, vue de l'arrière.)
 VIS À MÉTAUX NO 8-32 DE 3/8 PO
VIS À MÉTAUX NO 8-32 DE 3/8 PO
RONDELLE DE SÉCURITÉ À CRANS INTÉRIEURS NO 8- 32
DISPOSITIF D'ESPACEMENT EN ALUMINIUM (HEXAGONAL) DE 1,25 PO,
FILETAGE NO 8-32
RONDELLE DE SÉCURITÉ À CRANS INTÉRIEURS NO 8-32
G:\ENGINEER\PRODUCTS\MEC20_09.VSD Rev. 0 97/06/02
FIGURE 7
Remarques :
1.S’assurer que toutes les rondelles de sécurité sont installées comme l’illustre la figure cidessus.
2.La cloison en Mylar contre les tensions élevées (no de pièce : TMW;10805;1) doit être installée comme l’illustre la figure ci-dessus lorsque le MEC 20 est fixé à la porte du panneau de contrôle.
3.Pour installer le MEC 20 sur une porte sans goujons PEM de 1 po, utiliser des vis à métaux de 1 po.
PM047F REV 13 05/03/30 |
15 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
|
|
11,5 po |
haut |
|
|
|
C |
|
|
|
|
|
9 TROUS |
|
|
|
|
1/4 PO DE DIAMÈTRE |
|
|
|
DÉCOUPAGE |
|
|
po |
C |
|
|
|
7,5 |
|
|
|
|
|
|
|
|
|
|
|
|
4 TROUS |
|
|
|
|
3/16 PO DE DIAMÈTRE |
1/4po |
|
|
|
|
|
|
|
|
|
1/4po |
|
|
FIGURE 8 PLAQUE FRONTALE DE L'ADAPTATEURE |
|
|
|
|
5,5 po |
|
|
|
|
C |
|
|
3,5 po |
|
10,875 po |
|
|
|
C |
po |
|
|
|
6,875 |
|
|
|
|
|
|
|
|
FIGURE 9
DÉCOUPAGE DE PORTE POUR PLAQUE FRONTALE DE L'ADAPTATEUR
G:\ENGINEER\PRODUCTS\MEC20_11.VSD Rev. 0 97/06/02
2.15.ESSAI DIÉLECTRIQUE
Ne jamais effectuer d’essai diélectrique à tension élevée sur le panneau de contrôle lorsque le MEC 20 est connecté dans le circuit, car le contrôleur pourrait être gravement endommagé. Tous les fusibles à c.a. connectés au MEC 20 doivent être retirés
PM047F REV 13 05/03/30 |
16 |
Thomson Technology |
CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
préalablement à la conduite d’un essai diélectrique à tension élevée sur le panneau de contrôle.
3.DESCRIPTION
Le contrôleur MEC 20 est constitué de trois parties : une plaque frontale Lexan montée à l’extérieur de la porte d’accès, une plaquette de circuits imprimés (PCI) montée à l’intérieur de la porte d’accès et un couvercle arrière pour la PCI.
3.1.PLAQUE FRONTALE LEXAN
La plaque frontale Lexan est illustrée à la FIGURE 10. Les boutons-poussoirs Lexan sont connectés à la PCI principale par l’entremise d’un câble à rubans enfichable. Les principales caractéristiques de la plaque frontale Lexan sont décrites ci-dessous, selon
la FIGURE 10.
13 |
1 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
11 |
3 |
MICROPROCESSOR ENGINE CONTROLLER |
12 |
||||||
|
|
|
MEC 20 |
|
|
|
||
14 |
ALARM |
|
|
|
|
|
READY |
|
|
|
|
|
|
|
|
5 |
|
|
SHUTDOWN |
|
|
|
|
|
SPEED SIGNAL |
|
2 |
|
SILENCE |
LAMP TEST |
RESET |
|
|
8 |
|
|
EXIT |
DECREMENT |
INCREMENT |
ENTER |
|
|||
7 |
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
10 |
|
RUN |
|
OFF |
AUTO |
|
LOAD |
EMERGENCY |
|
|
|
|
TEST |
STOP |
|
|||
MEC20_03.VSD |
Rev 2 01/07/09 |
|
|
|
|
|
|
|
FIGURE 10
Fenêtre de l’affichage à cristaux liquides (ACL) : L’ACL est monté sur la PCI principale et il est visible à travers la fenêtre de la plaque frontale Lexan. Bouton-poussoir « PRÉCÉDENT/SORTIE » (« PREVIOUS/EXIT ») : La fonction PRÉCÉDENT permet de faire défiler vers l’arrière le menu d’état ou les
PM047F REV 13 05/03/30 |
17 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
messages de programmation. La fonction SORTIE permet de sortir du menu de
programmation. |
Pour ce faire, |
appuyer sur le bouton |
pendant |
environ 2 secondes lorsqu’on est en mode de programmation. |
|
||
Bouton-poussoir |
« DÉCRÉMENTER » |
(« DECREMENT ») : La |
fonction |
DÉCRÉMENTER permet de changer une valeur de programmation lorsqu’on est en mode de programmation. On peut décrémenter la valeur affichée jusqu’à la valeur désirée en appuyant sur ce bouton-poussoir. Remarque : Plus on appuie sur le bouton-poussoir longtemps, plus la valeur est décrémentée rapidement.
Bouton-poussoir « INCRÉMENTER » (« INCREMENT ») : La fonction INCRÉMENTER permet de changer une valeur de programmation lorsqu’on est en mode de programmation, ou de choisir la boucle du menu de programmation désirée. On peut incrémenter la valeur affichée jusqu’à la valeur désirée en appuyant sur ce bouton-poussoir. Remarque : Plus on appuie sur le boutonpoussoir longtemps, plus la valeur est incrémentée rapidement.
Bouton-poussoir « ENTRÉE » (« ENTER ») : La fonction ENTRÉE permet de faire défiler vers l’avant les menus d’état ou les messages de programmation. La fonction ENTRÉE permet d’entrer un mode de programmation, de même que d’accepter des valeurs de programmation modifiées. Remarque : Lorsqu’on est en mode de programmation, plus on appuie sur le bouton-poussoir « ENTRÉE » longtemps, plus les messages du menu défilent rapidement.
Bouton-poussoir « MARCHE » (« RUN ») et voyant à diode électroluminescente (DEL) : La fonction MARCHE permet de donner un signal de départ manuel au groupe électrogène. Consulter les directives d’utilisation afin d’obtenir de plus amples renseignements à ce sujet.
Bouton-poussoir « ARRÊT » (« OFF ») et voyant à DEL : La fonction ARRÊT permet de donner un signal d’arrêt au groupe électrogène. Consulter les directives d’utilisation afin d’obtenir de plus amples renseignements à ce sujet.
Bouton-poussoir « AUTOMATIQUE » (« AUTO ») et voyant à DEL : La fonction AUTOMATIQUE permet de commander le fonctionnement automatique du groupe électrogène. Consulter les directives d’utilisation afin d’obtenir de plus amples renseignements à ce sujet.
Bouton-poussoir ESSAI DE CHARGE (« LOAD TEST ») et voyant à DEL : La fonction ESSAI DE CHARGE permet de commander un essai de charge au groupe électrogène, lorsqu’il est connecté à un commutateur de transfert correspondant. Consulter les directives d’utilisation afin d’obtenir de plus amples renseignements à ce sujet.
PM047F REV 13 05/03/30 |
18 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
Bouton-poussoir « ARRÊT D’URGENCE » (« EMERGENCY STOP ») et voyant à DEL : La fonction ARRÊT D’URGENCE permet de donner un signal d’arrêt d’urgence au groupe électrogène. Consulter les directives d’utilisation afin d’obtenir de plus amples renseignements à ce sujet.
11Voyant à DEL « PRÊT » (« READY ») : Le voyant à DEL PRÊT s’allume lorsque le groupe électrogène est prêt à fonctionner en mode automatique et qu’aucun arrêt ou alarme de détection de défaillance n’est activé.
12Voyant à DEL « SIGNAL DE VITESSE » (« SPEED SIGNAL ») : Le voyant à DEL SIGNAL DE VITESSE s’allume lorsqu’il détecte le signal de vitesse du moteur, c’est-à-dire lorsque le moteur tourne.
13Voyant à DEL « ALARME » (« ALARM ») : La DEL ALARME clignote lorsqu’il y a détection d’une condition d’alarme.
14Voyant à DEL « ARRÊT » (« SHUTDOWN ») : La DEL ARRÊT clignote lorsqu’il y a détection d’une condition d’arrêt.
3.2.PLAQUETTE DE CIRCUITS IMPRIMÉS
La plaquette de circuits imprimés (PCI) est illustrée à la FIGURE 11. La PCI comprend les éléments d’interface utilisateur suivants :
MEC 20 CIRCUIT BOARD LAYOUT
B+ B- GRD TB4 |
TB2 MP1 MP2 1 |
17 |
J6
EXP |
R115 |
TB1 |
RJ45 |
CONTRAST |
IN |
|
||
|
|
|
|
|
IC |
J7 |
|
IB |
|
|
|
COM |
|
IA |
|
|
|
RJ45 |
|
VN |
|
|
|
WATCHDOG |
|
VC |
REMOTE START |
|
VB |
CRANK |
|
|
RUN |
|
VA |
COM FAIL |
|
|
|
|
|
|
TB3 18 |
38 |
G:\ENGINEER\PRODUCTS\MEC20_02.VSD Rev. 2 01/07/09
DRAWING SCALE (mm) = .6:1
FIGURE 11
PM047F REV 13 05/03/30 |
19 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
3.2.1. PLAQUES À BORNES
Quatre plaques à bornes sont disposées sur la PCI de la manière suivante :
PB1 Plaque à bornes, détection de courant et tension c.a. (120 - 600 V.c.a. et 0 - 5 A.c.a.).
AVERTISSEMENT
Les circuits de détection de tension peuvent engendrer des tensions mortelles lorsqu’ils sont sous tension. Les circuits secondaires des transformateurs de courant peuvent engendrer des tensions mortelles lorsqu’ils sont en circuit ouvert et que les circuits primaires sont sous tension. Les procédures de sécurité courantes doivent être respectées et les travaux doivent être effectués par du personnel qualifié uniquement. Tout manquement à ces directives peut provoquer des blessures et (ou) la mort.
|
|
|
PB2 |
Plaque à bornes, détection de vitesse et entrée de contact numérique. |
|
PB3 |
Plaque à bornes, contacts de sortie et signal d’entrée de température et |
|
|
de pression du moteur. |
|
PB4 |
Plaque à bornes, entrée d’alimentation c.c. et de mise à la terre. |
|
3.2.2.DEL DE DIAGNOSTIC
Le contrôleur MEC 20 comprend cinq DEL de diagnostic montées à l’arrière de la plaquette de circuits imprimés, comme l’illustre la FIGURE 11. Leur fonctions sont les suivantes :
3.2.2.1SURVEILLANCE
Cette DEL clignote à intervalles irréguliers afin d’indiquer que le microprocesseur fonctionne normalement.
3.2.2.2MISE EN MARCHE À DISTANCE
Cette DEL s’allume lorsque le MEC 20 reçoit un signal de mise en marche à distance.
3.2.2.3DÉMARRAGE
Cette DEL s’allume lorsque le MEC 20 émet un signal de démarrage du moteur.
3.2.2.4MARCHE
Cette DEL s’allume lorsque le MEC 20 commande la mise en marche du moteur.
PM047F REV 13 05/03/30 |
20 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
3.2.2.5PANNE COMMUNE
Cette DEL s’allume lorsque le MEC 20 émet un signal de panne (c’est-à-dire lorsqu’une alarme ou un arrêt de détection de défaillance est activé).
Remarque : Toutes les DEL s’allument lorsqu’on effectue un essai de voyant.
3.2.3. RÉGLAGE DU CONTRASTE (R115)
Le potentiomètre de réglage du contraste est situé à l’arrière de la PCI et il est ajusté en usine pour une température ambiante de 15 ºC à 30 ºC. Pour d’autres températures ambiantes que ces dernières, communiquer avec l’usine afin de connaître les procédures de réglage.
3.2.4. PORTS DE COMMUNICATION
Deux ports de communication RJ45 sont installés sur la plaquette de circuits imprimés pour les caractéristiques en option suivantes :
3.2.4.1EXP Ce port est utilisé pour interconnecter un module d’expansion externe permettant d’ajouter des contacts de sortie supplémentaires et (ou) d’utiliser l’annonciateur à distance EAP 110. Consulter les Section 7 et 8 de ce manuel pour obtenir de plus amples renseignements à ce sujet.
3.2.4.2J7 - COM Ce port est utilisé pour se connecter à un système de communication à distance permettant la surveillance et le contrôle de l’unité à distance. Consulter la Section 6 de ce manuel pour obtenir de plus amples renseignements à ce sujet.
4.DESCRIPTION DES CIRCUITS DE DÉTECTION DE DÉFAILLANCE
Le contrôleur pour groupe électrogène MEC 20 utilise de nombreuses entrées analogiques et numériques assurant des fonctions de surveillance et de contrôle. Trois types de circuits de détection de défaillance sont utilisés afin de surveiller et de contrôler le groupe électrogène. Le premier type, soit les circuits de détection de défaillance internes, provient d’une combinaison d’entrées numériques et analogiques. Le deuxième type, soit les circuits de détection de défaillance d’entrée numérique, provient des entrées de contact externes. Le troisième type, soit les circuits de détection de défaillance d’entrée analogique, provient des entrées de signaux analogiques externes. Le schéma fonctionnel suivant (FIGURE 12) montre la manière dont les circuits de détection de défaillance d’entrée/sortie s’agencent et la manière dont les circuits de détection de défaillance optionnels sont dérivés.
PM047F REV 13 05/03/30 |
21 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
4.1.SCHÉMA FONCTIONNEL DU MEC 20
|
|
|
FEATURE |
|
FACTORY PRO G RAMMED |
CUSTO MER CO NFIGURED |
O UTPUT CO NTACTS |
|
|
|
|
STANDARD FAULTS |
FAULTS |
||
|
|
|
|
|
|
||
MAGNETIC |
|
|
|
|
OVERSPEED |
|
|
PICKUP |
|
|
|
|
|
|
|
|
|
|
|
SHUTDOW N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RPM |
FAULT |
LOSS OF SPEED |
|
|
|
|
|
DISPLAY |
LOGIC |
ALARM/SHUTDOW N |
|
|
|
|
|
|
|
OVERCRANK |
|
|
|
|
|
|
|
SHUTDOW N |
|
|
|
|
|
AUTO PUSHBUTTON |
|
|
|
|
|
|
|
|
LOGIC |
SW ITCH NOT IN AUTO |
|
|
|
|
|
|
ALARM |
|
|
|
|
|
|
|
|
|
|
|
ENGINE TEMPERATURE |
|
|
LOW ENGINE TEMP. |
|
|
||
SENDER |
|
|
TEMP. |
FAULT |
ALARM |
|
|
|
|
|
HIGH ENGINE TEMP. |
|
|
||
|
|
|
DISPLAY |
LOGIC |
ALARM |
|
|
|
|
|
|
|
HIGH ENGINE TEMP. |
|
|
|
|
|
|
|
SHUTDOW N |
|
|
ENGINE OIL PRESSURE |
|
|
LOW OIL PRESSURE |
|
|
||
SENDER |
|
|
PRESS. |
FAULT |
|
|
|
|
|
|
ALARM |
|
|
||
|
|
|
DISPLAY |
LOGIC |
LOW OIL PRESSURE |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SHUTDOW N |
|
|
|
|
|
|
|
LOW BATTERY |
|
2 |
|
|
|
|
|
|
|
|
|
|
BATTERY |
|
|
VOLTAGE ALARM |
|
|
– |
+ |
DC |
|
|
|
|
|
VOLTAGE |
FAULT |
HIGH BATTERY |
|
|
|||
VOLT |
|
|
|||||
|
|
|
LOGIC |
VOLTAGE ALARM |
|
|
|
|
|
|
DISPLAY |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
W EAK BATTERY |
|
|
|
|
|
|
|
ALARM |
|
|
|
3 PHASE AC |
AC |
|
UNDERVOLTAGE |
|
2 |
|
|
V |
VOLTAGE |
VOLT/ |
FAULT |
OVERVOLTAGE |
|
|
|
|
FREQ. |
LOGIC |
UNDERFREQUENCY |
|
|
|
|
|
|
DISPLAY |
|
OVERFREQUENCY |
|
|
|
|
|
|
|
|
|
|
|
3 PHASE AC |
AC |
|
|
|
|
|
|
|
CURRENT |
FAULT |
|
|
2 |
|
|
|
CURRENT |
OVERCURRENT |
|
|||
|
|
|
LOGIC |
|
|||
|
|
|
DISPLAY |
|
|
|
|
|
|
|
|
|
|
|
|
DIGITAL INPUT |
|
|
|
|
|
||
CONTACTS (N/O or N/C) |
|
|
|
|
|
||
|
1 |
|
|
|
LOW OIL PRESSURE |
|
|
|
|
|
|
SHUTDOW N |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
HIGH ENGINE TEMP. |
|
|
|
|
|
|
SHUTDOW N |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
LOW COOLANT |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
LEVEL SHUTDOW N |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
LOW FUEL LEVEL |
|
|
|
|
|
|
ALARM |
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
FAULT |
|
DIGITAL FAULT #5 |
|
|
6 |
|
|
LOGIC |
|
DIGITAL FAULT #6 |
|
|
|
|
|
|
|
||
|
7 |
|
|
1 |
|
DIGITAL FAULT #7 |
|
|
|
|
|
|
|
||
|
8 |
|
|
|
|
DIGITAL FAULT #8 |
|
|
9 |
|
|
|
|
DIGITAL FAULT #9 |
|
|
10 |
|
|
|
|
DIGITAL FAULT #10 |
|
|
|
|
|
|
|
|
|
|
11 |
|
|
|
|
DIGITAL FAULT #11 |
|
|
12 |
|
|
|
|
DIGITAL FAULT #12 |
|
|
|
|
E. STOP |
|
|
|
|
|
|
N/O |
|
|
EMERGENCY STOP |
|
|
|
|
|
|
|
|
|
|
FIGURE 12
RUN
10A/240Vac, 8A/24Vdc RESISTIVE
CRANK
10A/240Vac, 8A/24Vdc RESISTIVE
COMMON FAIL CONTACT 10A/240Vac, 8A/24Vdc RESISTIVE
PROGRAMMABLE CONTACT #1 10A/240Vac, 8A/24Vdc RESISTIVE
PROGRAMMABLE CONTACT #2 10A/240Vac, 8A/24Vdc RESISTIVE
PROGRAMMABLE CONTACT #3 10A/240Vac, 8A/24Vdc RESISTIVE
PROGRAMMABLE CONTACT #4 10A/240Vac, 8A/24Vdc RESISTIVE
NOTES:
1DIGITAL FAULT LABEL LIST – EACH POINT PROGRAMMABLE
2PROGRAMMABLE FUNCTION LIST
G:\ENGINEER\PRODUCTS\ MEC20_10.VSD Rev. 3 02/02/20
PM047F REV 13 05/03/30 |
22 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
4.2.CIRCUITS DE DÉTECTION DE DÉFAILLANCE INTERNES
Le contrôleur pour groupe électrogène MEC 20 possède quatre circuits de détection de défaillance activés à l’interne, comme il est décrit ci-dessous. Tous les circuits de détection de défaillance internes sont offerts en série sur le contrôleur MEC 20.
4.2.1.SUR-DÉMARRAGE
Le circuit de détection de surdémarrage s’enclenche lorsque le moteur n’a pas réussi à se mettre en marche après le temps de démarrage et le nombre de cycles de démarrage sélectionnés. Le circuit de détection de surdémarrage est programmé à l’interne comme dispositif de verrouillage et d’arrêt et il ne peut être modifié par l’utilisateur. Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
4.2.2.SURVITESSE
Le circuit de détection de survitesse s’enclenche lorsque la vitesse du moteur est supérieure à la valeur de consigne de survitesse. Le circuit de détection de survitesse est programmé à l’interne comme dispositif de verrouillage et d’arrêt. On peut programmer le circuit de détection de survitesse au niveau du pourcentage de la vitesse nominale du moteur, c’est-à-dire de la valeur de consigne de survitesse, ainsi que du délai transitoire. Les messages de programmation pour la survitesse sont situés dans la boucle de programmation du menu principal. Consulter les directives de programmation pour obtenir de plus amples renseignements à ce sujet.
4.2.3.PERTE DE VITESSE
Le circuit de détection de perte de vitesse s’enclenche lorsque le circuit de détection de vitesse du moteur ne détecte pas de signal de vitesse pendant une période de plus de deux secondes à la suite d’un signal de marche. Le circuit de détection de perte de vitesse est programmable par l’utilisateur en tant que dispositif de verrouillage et d’arrêt ou d’alarme uniquement. Les messages de programmation pour la perte de vitesse sont située dans la boucle de programmation du menu principal. Consulter les directives d’utilisation pour obtenir de plus amples renseignements à ce sujet.
PM047F REV 13 05/03/30 |
23 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
4.2.4.COMMUTATEUR PAS EN POSITION AUTOMATIQUE
Le circuit de détection de retrait du commutateur de la position automatique s’enclenche lorsque le commutateur de mode de fonctionnement est déplacé de la position de fonctionnement automatique à une autre, à partir du clavier monté à l’avant. Ce circuit de détection de défaillance est programmé à l’interne, comme alarme sans verrouillage. Cette alarme peut être programmée par l’utilisateur pour enclencher le relais de sortie de panne commune, à partir de la boucle principale du menu.
4.3.CIRCUITS DE DÉTECTION DE DÉFAILLANCE D’ENTRÉE NUMÉRIQUE
Le contrôleur pour groupe électrogène MEC 20 offre jusqu’à douze circuits de détection de défaillance d’entrée numérique programmables par l’utilisateur. Chaque circuit de détection de défaillance d’entrée numérique est activé par un contact de détection à distance situé à l’extérieur du contrôleur.
Chaque circuit de détection de défaillance d’entrée numérique peut être programmé à l’aide d’une étiquette de description de défaillance située dans la mémoire permanente du contrôleur. Chaque contrôleur à microprocesseur MEC 20 comprend les étiquettes de détection de défaillance numérique suivantes :
DÉCLENCHEMENT DU RÉGULATEUR |
TEMPÉRATURE ÉLEVÉE DE |
D’AIR |
L’HUILE |
DÉFAILLANCE DE L’ENTRÉE DU |
TEMPÉRATURE DU BOBINAGE |
CHARGEUR DE BATTERIE |
ÉLEVÉE |
DÉFAILLANCE DU CHARGEUR DE |
MARCHE AU RALENTI |
BATTERIE |
|
DÉCLENCHEMENT DU |
BAS NIVEAU DE LIQUIDE DE |
DISJONCTEUR |
REFROIDISSEMENT |
DÉFAILLANCE DU C.C. |
BASSE TEMPÉRATURE DU |
|
MOTEUR |
DÉFAILLANCE DE |
BASSE PRESSION D’ESSENCE |
SYNCHRONISATION |
|
DISJONCTEUR DU GÉNÉRATEUR |
BAS NIVEAU D’ESSENCE |
OUVERT |
|
DÉFAILLANCE DE MISE À LA TERRE |
BASSE PRESSION D’HUILE |
TEMPÉRATURE ÉLEVÉE DU PALIER |
|
VIBRATION IMPORTANTE DU |
|
DISPOSITIF DE REFROIDISSEMENT |
|
PM047F REV 13 05/03/30 |
24 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
TEMPÉRATURE ÉLEVÉE DU |
|
ARRÊT D’URGENCE À DISTANCE |
|
MOTEUR |
|
|
|
VIBRATION IMPORTANTE DU |
|
RETOUR DE PUISSANCE |
|
MOTEUR |
|
|
|
NIVEAU D’ESSENCE ÉLEVÉ |
|
|
|
NIVEAU D’HUILE ÉLEVÉ |
|
|
|
ESSAI À VIDE |
|
|
RUPTURE DU BASSIN |
*TEMPÉRATURE |
ÉLEVÉE |
DU |
COMMUTATEUR DE TRANSFERT |
COLLECTEUR D’ADMISSION |
|
EN DÉRIVATION |
|
DÉFAILLANCE DU |
RÉGULATEUR |
FUITE D’ESSENCE |
|
D’AÉRATION |
|
|
|
NIVEAU ÉLEVÉ D’ESSENCE |
|
BASSE PRESSION D’ESSENCE |
|
DÉFAILLANCE |
|
DE |
DÉFAILLANCE DU CHARGEUR DE |
SYNCHRONISATION |
|
|
BATTERIE |
BASSE PRESSION D’HUILE |
|
|
|
« Vide » (Aucune inscription pour les entrées inutilisées.)
Remarque : Jusqu’à six étiquettes de détection de défaillance personnalisées peuvent être commandées pour le MEC 20 au moment de l’achat. Les six étiquettes de détection de défaillance personnalisées ne peuvent être modifiées par la suite.
4.3.1.CIRCUITS DE DÉTECTION DE DÉFAILLANCE NUMÉRIQUE PROGRAMMÉS EN USINE
Le MEC 20 est muni des douze circuits de détection de défaillance numérique de série suivants :
DESCRIPTION DE LA |
RÉSULTAT DE LA |
NO DE BORNE |
DÉFAILLANCE |
DÉFAILLANCE |
D’ENTRÉE |
|
|
|
Basse pression d’huile |
Arrêt |
1 |
Température élevée du moteur |
Arrêt |
2 |
Défaillance de l’entrée du |
Alarme |
3 |
chargeur de la batterie |
|
|
|
|
|
PM047F REV 13 05/03/30 |
25 |
Thomson Technology |

CONTRÔLEUR À MICROPROCESSEUR POUR GROUPE ÉLECTROGÈNE MEC 20
Bas niveau d’essence |
Alarme |
4 |
Entrée numérique no 5 |
Alarme |
5 |
Entrée numérique no 6 |
Alarme |
6 |
Entrée numérique no 7 |
Alarme |
7 |
Entrée numérique no 8 |
Alarme |
8 |
Entrée numérique no 9 |
Alarme |
9 |
Entrée numérique no 10 |
Alarme |
10 |
Arrêt d’urgence à distance |
Arrêt |
11 |
Marche au ralenti |
N/A |
12 |
|
|
|
Consulter la Section 11.4 intitulée Menu de programmation de défaillances numériques pour connaître les réglages par défaut en usine.
Remarque : Les entrées de défaillance no 5 à 10 doivent être configurées par le client, sauf si précisé autrement au moment de la commande.
Tous les circuits de détection de défaillance doivent être connectés à la borne d’entrée du MEC 20 par l’utilisateur. Tous les circuits de détection de défaillance peuvent être programmés par l’utilisateur sur le terrain pour différentes fonctions de contrôle ou pour la détection de différentes défaillances.
Remarque : Pour les applications régies par la norme C282 de la CSA, le contrôleur est doté d’un dispositif d’arrêt en cas de détection de bas niveau de liquide de refroidissement au lieu d’une alarme de détection de défaillance d’entrée de chargeur de batterie. Consulter les directives de programmation pour obtenir de plus amples renseignements sur les circuits de détection de défaillance numérique.
Remarque : Les fonctions d’arrêt relatives à une basse pression d’huile et à une température élevée du moteur peuvent aussi être fournies par des entrées de capteur de pression et de température analogiques si elles ont été programmées en conséquence dans le menu de programmation des défaillances analogiques. Consulter la Section 11.3 pour obtenir de plus amples renseignements à ce sujet.
PM047F REV 13 05/03/30 |
26 |
Thomson Technology |
 Loading...
Loading...