


M8 Product Manual
2.5” Hard Disk Drive
June 05, 2012. Rev 2.3
© 2012 Seagate Technology LLC. All rights reserved. Seagate and Seagate Technology are registered trademarks of Seagate Technology LLC in the United States and/or other countries. Momentus is either a trademark or registered trademark of Seagate Technology LLC or one of its affiliated companies in the United States and/or other countries. All other trademarks or registered trademarks are the property of their respective owners. When referring to drive capacity, one gigabyte, or GB, equals one billion bytes and one terabyte, or TB, equals one trillion bytes. Your computer’s operating system may use a different standard of measurement and report a lower capacity. In addition, some of the listed capacity is used for formatting and other functions, and thus will not be available for data storage. Actual data rates may vary depending on operating environment and other factors. The export or re-export of hardware or software containing encryption may be regulated by the U.S. Department of Commerce, Bureau of Industry and Security (for more information, visit www.bis.doc.gov), and controlled for import and use outside of the U.S. Seagate reserves the right to change, without notice, product offerings or specifications.
TABLE OF CONTENTS
CHAPTER 1 |
SCOPE ............................................................................................................................. |
1 |
|
1.1 |
USER DEFINITION .............................................................................................................................. |
1 |
|
1.2 |
MANUAL ORGANIZATION .................................................................................................................. |
1 |
|
1.3 |
SATA |
................................................................................................................................................. |
2 |
1.4 |
REFERENCE ........................................................................................................................................ |
2 |
|
CHAPTER 2 |
DESCRIPTION .............................................................................................................. |
3 |
|
2.1 |
INTRODUCTION .................................................................................................................................. |
3 |
|
2.2 |
KEY F ..................................................................................................................................EATURES |
4 |
|
2.3 |
STANDARDS ........................................................................................................AND REGULATIONS |
5 |
|
2.4 |
HARDWARE .............................................................................................................REQUIREMENTS |
5 |
|
CHAPTER 3 ........................................................................................................ |
SPECIFICATIONS |
6 |
|
3.1 |
SPECIFICATION ................................................................................................................SUMMARY |
6 |
|
3.2 |
PHYSICAL ...............................................................................................................SPECIFICATIONS |
7 |
|
3.3 |
LOGICAL ..............................................................................................................CONFIGURATIONS |
7 |
|
3.4 |
PERFORMANCE ......................................................................................................SPECIFICATIONS |
8 |
|
3.5 |
POWER ......................................................................................................................CONSUMPTION |
9 |
|
3.6 |
ENVIRONMENTAL ................................................................................................SPECIFICATIONS |
10 |
|
3.7 |
RELIABILITY ........................................................................................................SPECIFICATIONS |
12 |
|
CHAPTER 4 .......................................................................................................... |
INSTALLATION |
13 |
|
4.1 |
SPACE ....................................................................................................................REQUIREMENTS |
13 |
|
4.2 |
UNPACKING .............................................................................................................INSTRUCTIONS |
14 |
|
4.3 |
MOUNTING ....................................................................................................................................... |
14 |
|
4.3.1 ...................................................................................................................... |
Orientation |
15 |
|
4.3.2 ........................................................................................................................ |
Clearance |
16 |
|
4.3.3 ...................................................................................................................... |
Ventilation |
17 |
|
4.4 |
CABLE .......................................................................................................................CONNECTORS |
17 |
|
4.4.1 .......................................................................................................... |
SATA Connectivity |
17 |
|
4.5 |
DRIVE ......................................................................................................................INSTALLATION |
22 |
|
CHAPTER 5 ........................................................................................ |
DISK DRIVE OPERATION |
23 |
|
5.1 |
HEAD ....................................................................................................../ DISK ASSEMBLY (HDA) |
23 |
|
5.1.1 ................................................................................................... |
Base Casting Assembly |
23 |
|
5.1.2 ........................................................................................... |
DC Spindle Motor Assembly |
23 |
|
5.1.3 ....................................................................................................... |
Disk Stack Assembly |
25 |
|
5.1.4 ...................................................................................................... |
Head Stack Assembly |
25 |
|
5.1.5 .......................................................... |
Voice Coil Motor and Actuator Latch Assemblies |
25 |
|
5.1.6 ....................................................................................................... |
Air Filtration System |
25 |
|
5.1.7 ................................................................................................ |
Load/Unload Mechanism |
25 |
|
5.2 |
DRIVE .......................................................................................................................ELECTRONICS |
26 |
|
5.2.1 ............................................................ |
Digital Signal Process and Interface Controller |
26 |
|
5.2.2 ............................................................................................................... |
Disk Controller |
26 |
|
|
5.2.2.1 ................................................................................................. |
The Host Interface Control Block |
28 |
|
5.2.2.2 ............................................................................................................. |
The Buffer Control Block |
28 |
|
5.2.2.3 ................................................................................................................ |
The Disk Control Block |
29 |
|
5.2.2.4 ..................................................................................................... |
The Disk LDPC Control Block |
29 |
|
5.2.2.5 .................................................................................................................. |
Frequency Synthesizer |
29 |
|
5.2.2.6 ....................................................................................................................... |
Power Management |
30 |
5.2.3 ................................................................................................................. |
Read/Write IC |
30 |
|
|
5.2.3.1 ..................................................................................................................... |
Time Base Generator |
30 |
|
5.2.3.2 ................................................................................................................ |
Automatic Gain Control |
30 |
|
5.2.3.3 ....................................................................................... |
Asymmetry Correction Circuitry (ASC) |
30 |
|
5.2.3.4 .......................................................................................... |
Analog Anti - Aliasing Low Pass Filter |
31 |
Spinpoint M8 Product Manual REV 2.3
|
5.2.3.5 |
Analog to Digital Converter (ADC) and FIR ................................................................................ |
31 |
5.3 |
SERVO SYSTEM ................................................................................................................................ |
32 |
|
5.4 |
READ AND WRITE OPERATIONS ...................................................................................................... |
32 |
|
5.4.1 |
The Read Channel........................................................................................................... |
32 |
|
5.4.2 |
The Write Channel .......................................................................................................... |
33 |
|
5.5 |
FIRMWARE FEATURES ..................................................................................................................... |
33 |
|
5.5.1 |
Read Caching ................................................................................................................. |
33 |
|
5.5.2 |
Write Caching................................................................................................................. |
34 |
|
5.5.3 |
Defect Management ........................................................................................................ |
35 |
|
5.5.4 |
Automatic Defect Allocation ........................................................................................... |
35 |
|
5.5.5 |
Multi-burst ECC Correction ........................................................................................... |
35 |
|
5.5.6 |
SMART............................................................................................................................ |
35 |
|
CHAPTER 6 |
SATA II INTERFACE ................................................................................................. |
37 |
|
6.1 |
INTRODUCTION ................................................................................................................................ |
37 |
|
SATA Terminology.................................................................................................................................... |
37 |
||
6.2 |
PHYSICAL INTERFACE ..................................................................................................................... |
39 |
|
6.3 |
SIGNAL SUMMARY ........................................................................................................................... |
39 |
|
6.3.1 |
Signal Descriptions......................................................................................................... |
39 |
|
6.3.2 |
I/O Register - Address .................................................................................................... |
40 |
|
6.3.3 |
Control Block Register Descriptions .............................................................................. |
40 |
|
|
6.3.3.1 |
Alternate Status Register (ex. 3F6h) ............................................................................................. |
40 |
|
6.3.3.2 |
Device Control Register (ex. 3F6h)............................................................................................... |
41 |
6.3.4 |
Command Block Register Descriptions .......................................................................... |
41 |
|
|
6.3.4.1 |
Data Register (Ex. 1F0h)............................................................................................................... |
41 |
|
6.3.4.2 |
Features Register and Feature Extended Register (Ex. 1F1h) ....................................................... |
41 |
|
6.3.4.3 |
Sector Number Register and Sector Number Extended Register (Ex. 1F3h) ................................ |
41 |
|
6.3.4.4 |
Error Register (Ex. 1F1h).............................................................................................................. |
41 |
|
6.3.4.5 |
Sector Count Register and Sector Count Extended Register (Ex. 1F2h) ....................................... |
42 |
|
6.3.4.6 |
Cylinder High Register and Cylinder High Extended Register (Ex. 1F5h) ................................... |
42 |
|
6.3.4.7 |
Cylinder Low Register and Cylinder Low Extended Register (Ex. 1F4h) .................................... |
42 |
|
6.3.4.8 |
Command Register (Ex. 1F7h)...................................................................................................... |
42 |
|
6.3.4.9 |
Device Register (Ex. 1F6h)........................................................................................................... |
42 |
|
6.3.4.10 |
Status Register (Ex. 1F7h) ............................................................................................................ |
43 |
CHAPTER 7 |
SATA II FEATURE SET ............................................................................................. |
44 |
|
7.1 |
DEVICE ACTIVITY SIGNAL .............................................................................................................. |
44 |
|
7.2 |
STAGGERED SPIN-UP DISABLE CONTROL ....................................................................................... |
44 |
|
7.3 |
AUTO-ACTIVATE IN DMA SETUP FIS ............................................................................................ |
44 |
|
7.4 |
NATIVE COMMAND QUEUING (NCQ) ............................................................................................. |
44 |
|
7.5 |
PHY. EVENT COUNTERS .................................................................................................................. |
45 |
|
7.6 |
SOFTWARE SETTINGS PRESERVATION............................................................................................ |
46 |
|
7.7 |
SATA POWER MANAGEMENT......................................................................................................... |
46 |
|
CHAPTER 8 |
ATA COMMAND DESCRIPTIONS .......................................................................... |
47 |
|
8.1 |
COMMAND TABLE............................................................................................................................ |
47 |
|
8.2 |
COMMAND DESCRIPTIONS............................................................................................................... |
48 |
|
8.2.1 |
Check Power Mode (E5h)............................................................................................... |
48 |
|
8.2.2 |
Download Micro Code (92h).......................................................................................... |
49 |
|
8.2.3 |
Device Configuration Overlay (B1h).............................................................................. |
49 |
|
8.2.4 |
Execute Device Diagnostics (90h) .................................................................................. |
51 |
|
8.2.5 |
Flush Cache (E7h, EAh: extended)................................................................................. |
51 |
|
8.2.6 |
Format Track (50h) ........................................................................................................ |
51 |
|
8.2.7 |
Identify Device (ECh) ..................................................................................................... |
51 |
|
8.2.8 |
Idle (E3h)........................................................................................................................ |
57 |
|
8.2.9 |
Idle Immediate (E1h) ...................................................................................................... |
57 |
|
8.2.10 |
Initialize Device Parameters (91h)................................................................................. |
58 |
|
8.2.11 |
NOP (00h)....................................................................................................................... |
58 |
|
8.2.12 |
Read Buffer (E4h) ........................................................................................................... |
58 |
|
8.2.13 |
Read DMA (C8h, 25h:extended)..................................................................................... |
58 |
|
Spinpoint M8 Product Manual REV 2.3
8.2.14 |
Read FPDMA Queued (60h)........................................................................................... |
58 |
8.2.15 |
Read Log Extended (2Fh) ............................................................................................... |
59 |
8.2.16 |
Read Long (22h) ............................................................................................................. |
59 |
8.2.17 |
Read Multiple Command (C4h, 29h:extended)............................................................... |
59 |
8.2.18 |
Read Native Max Address (F8h, 27h :extended) ......................................................... |
60 |
8.2.19 |
Read Sector(s) (20h, 24h: extended)............................................................................... |
60 |
8.2.20 |
Read Verify Sector(s) (40h, 41h :extended) .................................................................... |
60 |
8.2.21 |
Recalibrate (10h) ............................................................................................................ |
61 |
8.2.22 |
Security Disable Password (F6h) ................................................................................... |
61 |
8.2.23 |
Security Erase Prepare (F3h)......................................................................................... |
61 |
8.2.24 |
Security Erase Unit (F4h)............................................................................................... |
61 |
8.2.25 |
Security Freeze Lock (F5h)............................................................................................. |
62 |
8.2.26 |
Security Set Password (F1h)........................................................................................... |
62 |
8.2.27 |
Security Unlock (F2h)..................................................................................................... |
63 |
8.2.28 |
Seek (7xh) ....................................................................................................................... |
63 |
8.2.29 |
Set Features (EFh).......................................................................................................... |
63 |
8.2.30 |
Set Max Address (F9h, 37h: extended) ........................................................................... |
65 |
8.2.31 |
Set Multiple Mode (C6h)................................................................................................. |
65 |
8.2.32 |
Sleep (E6h) ..................................................................................................................... |
65 |
8.2.33 |
Standby (E2h) ................................................................................................................. |
65 |
8.2.34 |
SMART (B0h).................................................................................................................. |
66 |
|
8.2.34.1 |
Smart disable operations (D9h)..................................................................................................... |
66 |
|
8.2.34.2 |
Smart enable/disable attribute auto-save (D2h)............................................................................. |
66 |
|
8.2.34.3 |
Smart enable operations (D8h)...................................................................................................... |
67 |
|
8.2.34.4 |
Smart execute off-line immediate (D4h) ....................................................................................... |
67 |
|
8.2.34.5 |
Smart read data (D0h) ................................................................................................................... |
68 |
|
8.2.34.6 |
SMART read log sector (D5h) ...................................................................................................... |
74 |
|
8.2.34.7 |
SMART return status (DAh) ......................................................................................................... |
74 |
|
8.2.34.8 |
SMART write log sector (D6h)..................................................................................................... |
74 |
8.2.35 |
Standby (E2h) ................................................................................................................. |
74 |
|
8.2.36 |
Standby Immediate (E0h)................................................................................................ |
74 |
|
8.2.37 |
Write Buffer (E8h) .......................................................................................................... |
74 |
|
8.2.38 |
Write DMA (CAh, 35h:extended).................................................................................... |
74 |
|
8.2.39 |
Write FPDMA Queued (61h).......................................................................................... |
75 |
|
8.2.40 |
Write Long (32h)............................................................................................................. |
75 |
|
8.2.41 |
Write Multiple Command (C5h, 39h:extended) .............................................................. |
75 |
|
8.2.42 |
Write Sector(s) (30h, 34h:extended) ............................................................................ |
76 |
|
CHAPTER 9 |
MAINTENANCE.......................................................................................................... |
77 |
|
9.1 |
GENERAL INFORMATION ................................................................................................................. |
77 |
|
9.2 |
MAINTENANCE PRECAUTIONS ........................................................................................................ |
77 |
|
9.3 |
SERVICE AND REPAIR ...................................................................................................................... |
79 |
|
Spinpoint M8 Product Manual REV 2.3
TABLE OF TABLES |
|
Table 3-1 : Specifications .......................................................................................................................... |
6 |
Table 3-2 : Physical Specifications ............................................................................................................ |
7 |
Table 3-3 : Logical Configurations ............................................................................................................ |
7 |
Table 3-4 : Performance Specifications ..................................................................................................... |
8 |
Table 3-5 : Power consumption ................................................................................................................. |
9 |
Table 3-6 : Environmental Specifications ................................................................................................ |
10 |
Table 3-7 : Reliability Specifications....................................................................................................... |
12 |
Table 4-1 SATA Connector Pin Definitions ............................................................................................ |
19 |
Table 7-1 Phy Event Counter Supports.................................................................................................... |
45 |
Table 8-1 Command Code Parameters .................................................................................................... |
47 |
Table 8-2 Device Configuration Overlay Feature Register Values.......................................................... |
49 |
Table 8-3 Device Configuration Identify data structure .......................................................................... |
50 |
Table 8-4 Diagnostic Codes..................................................................................................................... |
51 |
Table 8-5 IDENTIFY DEVICE information ........................................................................................... |
52 |
Table 8-6 Automatic Standby Timer Periods........................................................................................... |
57 |
Table 8-7 Security password content ....................................................................................................... |
61 |
Table 8-8 Security Erase Unit Password.................................................................................................. |
62 |
Table 8-9 Security Set Password data content ......................................................................................... |
62 |
Table 8-10 Identifier and security level bit interaction ............................................................................ |
63 |
Table 8-11 Set Features Register Definitions .......................................................................................... |
64 |
Table 8-12 Transfer Mode Values ........................................................................................................... |
64 |
Table 8-13 Set Max Feature Register Values .......................................................................................... |
65 |
Table 8-14 SMART Feature Registers Values......................................................................................... |
66 |
Table 8-15 Device SMART Data Structure ............................................................................................. |
68 |
Table 8-16 SMART Attribute Status Flags.............................................................................................. |
69 |
Table 8-17 SMART Attribute Data List .................................................................................................. |
71 |
Table 8-18 Off-line Data Collection Status Values ................................................................................. |
71 |
Table 8-19 Self-test Execution Status Values .......................................................................................... |
72 |
Spinpoint M8 Product Manual REV 2.3

SCOPE
CHAPTER 1 SCOPE
Welcome to the SpinpointTM M8 series of SamsungTM hard disk drive. This series of drives consists of the following models: ST250LM004, ST320LM001, ST500LM012, ST640LM001, ST750LM022, and ST1000LM024. This chapter provides an overview of the contents of this manual, including the intended user, manual organization, terminology and conventions. In addition, it provides a list of references that might be helpful to the reader.
1.1User Definition
The Spinpoint M8 product manual is intended for the following readers:
Original Equipment Manufacturers (OEMs)
Distributors
1.2Manual Organization
This manual provides information about installation, principles of operation, and interface command implementation. It is organized into the following chapters:
Chapter 1 |
- |
SCOPE |
Chapter 2 |
- |
DESCRIPTION |
Chapter 3 |
- |
SPECIFICATIONS |
Chapter 4 |
- |
INSTALLATION |
Chapter 5 |
- |
DISK DRIVE OPERATION |
Chapter 6 |
- |
SATA INTERFACE |
Chapter 7 |
- |
MAINTENANCE |
In addition, this manual contains a glossary of terms to help you understand important information
Spinpoint M8 Product Manual REV 2.3 |
1 |

SCOPE
1.3SATA
The ATA (Advanced Technology Attachment) interface which was developed based on the IDE (Integrated Drive Electronics) has been around from 1980’s. As the PC processor speed has improved, so have the data rates of the HDD. The parallel ATA is reaching its limit of 133 MB/s data transfer rate. Serial implementation of ATA (SATA) will allow the data rate to run even faster so the processor will be utilized more efficiently. Serial ATA has been developed to provide the next generation storage interface.
SATA interface replaces 2 inch wide, 40 pin parallel interface connector with 0.25 inch wide 7 pin serial interface connector. The maximum length of the SATA interface cable can be extended to 1
meter (approximately 39 inches) compared to |
18 inch of parallel ATA. SATA also allows a |
data |
transfer speed of 150 MB/s and has a roadmap up to 600 MB/s to support storage evolution of |
the |
|
next d e c a d e . Even though SATA will |
not directly interface with Parallel or traditional |
|
ATA (PATA) hardware, it is compliant with ATA protocol and therefore software compatible. The cable geometry with smaller footprint connector reduces board space requirements and improves air flow and heat exchange inside computer systems.
SATA uses point to point connection topology and each channel works independently. There is no sharing of interface, master/slave drive configuration, and no master/slave jumper settings. This is different from Parallel ATA (PATA) architecture where 2 drives per port are supported by a shared bus and drives are designated as master or slave drive based on jumper pin or cable selection. Unlike parallel ATA, SATA drives are hot-plug and hot-swappable.
1.4Reference
For additional information about the AT interface, refer to:
ATA-2 (AT Attachment 2), Revision 3, January, 1995
ATA-3 (Attachment-3 Interface) Revision 7b, 27 January, 1997
ATA-4 (AT Attachment with Packet Interface Extension) Revision 18, 19 August, 1998
ATA-5 (AT Attachment with Packet Interface Extension) Revision 3, 29 February, 2000
ATA-6 (AT Attachment with Packet Interface Extension) Revision 2a, 26 September, 2001
ATA-7 (AT Attachment with Packet Interface Extension) Revision 1, 28 August, 2002
ATA-8 (AT Attachment with Packet Interface Extension) Revision 0, 16 September, 2008
For introduction about SATA interface please refer to:
SATA 1.0 Design Guides, April 5, 2002. (URL: http:// www.serialdata.org retrieved on May 22, 2003)
Serial ATA: A comparison with Ultra ATA Technology (URL: http://www.intel.com retrieved April 18,2003)
Serial ATA: High Speed Serialized AT Attachment, Rev. 1.0a, January 7, 2003, Serial Workgroup. (URL: http://www.serialdata.org retrieved on May 22, 2003)
Serial ATA II: Port Multiplier 1.0 Specification, April 29th, 2003. (URL: http://www.serialdata.org retrieved on May 22, 2003)
Spinpoint M8 Product Manual REV 2.3 |
2 |

DESCRIPTION
CHAPTER 2 DESCRIPTION
This chapter summarizes general functions and key features of the Spinpoint M8 hard disk drive, as well as the standards and regulations they meet.
2.1Introduction
The Samsung Spinpoint M8 2.5 inch hard disk drive is high capacity, high performance random access storage device, which uses non-removable 2.5-inch disks as storage media. Each disk incorporates thin film metallic media technology for enhanced performance and reliability. And for each disk surface there is a corresponding movable head actuator assembly to randomly access the data tracks and write or read the user data.
The Spinpoint M8 hard disk drive includes the AT controller embedded in the disk drive PCB electronics. The drive's electrical interface is compatible with all mandatory, optional and vendor-specific commands within the ATA specification.
Drive size conforms to the industry standard 2.5-inch form factor with a SATA 15-pin DC power connector, and the standard SATA 7-pin Interface connector.
The Spinpoint M8 hard disk drive incorporates TuMR head and Noise Predictive PRML (Partial Response Maximum Likelihood) signal processing technologies. These advanced technologies allow for areal density of about 700.0 Gigabits per square inch and storage capacity of over 500.0 Gigabytes per disk.
The heads, disk(s), and actuator housing are environmentally sealed within an aluminum-alloy base and cover. As the disks spin, air circulates within this base and cover, commonly referred to as the head and disk assembly (HDA), through a non-replaceable absolute filter ensuring a contamination free environment for the heads and disks throughout the life of the drive.
Spinpoint M8 Product Manual REV 2.3 |
3 |

DESCRIPTION
2.2Key Features
Key features of the Spinpoint M8 SATA hard disk drive includes:
Formatted capacities are 250, 320, 500, 640, 750 GB, 1TB
9.5 ± 0.2 mm height form factor
5400 RPM Class
12 ms average seek time
High accuracy rotary voice coil actuator with embedded sector servo
Support ATA standard PIO Mode 4/DMA Mode 2/Ultra DMA Mode 5 (UDMA 100)
Serial ATA (SATA) Interface
Supports SATA interface 3.0 Gbps (1.5 Gbps) speed
Native SATA device without using SATA bridge chip
Support SATA 3.0 and SATA II features
Asynchronous Signal Recovery (ASR)
Pin-11 Device Activity Signal (Activity LED)
Pin-11 Staggered Spin-up Control
Auto-Activate DMA Setup FIS
Native Command Queuing with queue depth of 32 (First Party DMA)
Physical Event Counters
Software Settings Preservation
SATA Device Hot Plug Capability
Device Initiated Power Management
Supports LBA Addressing modes
Supports all logical geometries as programmed by the host
Transparent media defect mapping
High performance in-line defective sector skipping
Auto-reassignment
Automatic error correction and retries
On-the-fly (OTF) error correction
Noise predictive PRML read channel
TA detection and correction
TuMR/PMR head
SMART III support
1MB = 1,000,000 Bytes, 1GB = 1,000,000,000 Bytes
Accessible capacity may vary as some OS uses binary numbering system for reported capacity.
Spinpoint M8 Product Manual REV 2.3 |
4 |
DESCRIPTION
2.3Standards and Regulations
The Spinpoint M8 / Momentus® series hard disk drive depends upon its host equipment to provide power and appropriate environmental conditions to achieve optimum performance and compliance with applicable industry and governmental regulations. Special attention has been given in the areas of safety, power distribution, shielding, audible noise control, and temperature regulation.
The Spinpoint M8 hard disk drive satisfies the following standards and regulations:
Underwriters Laboratory (UL): Standard 1950. Information technology equipment including business equipment.
Technisher Überwachungs Verein (TUV): Standard EN 60 950. Information technology equipment including business equipment.
2.4Hardware Requirements
The Spinpoint M8 hard disk drive is designed for use with host computers and controllers that are ATA compatible. It is connected to a PC either by:
Using an adapter board with SATA interface, or
Plugging a cable from the drive directly into a PC motherboard with a SATA interface
Spinpoint M8 Product Manual REV 2.3 |
5 |

SPECIFICATIONS
CHAPTER 3 SPECIFICATIONS
This chapter gives a detail description of the physical, electrical and environmental characteristics of the Spinpoint M8 hard disk drive.
3.1Specification Summary
Table 3-1: Specifications
DESCRIPTION |
ST250LM004 |
ST320LM001 |
ST500LM012 |
ST640LM001 |
ST750LM022 |
ST1000LM024 |
Number of R/W heads |
2 |
|
4 |
|
||
|
|
|
|
|
||
Maximum KBPI |
|
|
179K |
|||
|
|
|
|
|
|
|
Flexible data TPI |
|
|
400 |
|
|
|
|
|
|
|
|||
Encoding method |
|
|
Noise Predictive PRML |
|||
|
|
|
|
|||
Interface |
|
|
SATA 3.0 Gbps (1.5 Gbps) |
|||
|
|
|
|
|||
Actuator type |
|
|
Rotary Voice Coil |
|||
|
|
|
|
|||
Servo type |
|
|
Embedded Sector Servo |
|||
|
|
|
|
|||
Spindle speed (RPM) |
|
|
5400 RPM Class |
|||
|
|
|
|
|
|
|
Spinpoint M8 Product Manual REV 2.3 |
6 |

SPECIFICATIONS
3.2Physical Specifications
|
Table 3-2: Physical Specifications |
|||||
|
|
|
|
|
|
|
DESCRIPTION |
ST250LM004 |
ST320LM001 |
ST500LM012 |
ST640LM001 |
ST750LM022 |
ST1000LM024 |
Physical dimensions |
|
|
|
|
|
|
Length (mm) |
100.3 ± 0.4 |
|
|
|||
Width (mm) |
69.85 ± 0.25 |
|
|
|||
Height (mm) |
9.5 ± 0.2 |
|
|
|||
Weight (g, max) |
|
|
1 Disk 99 / 2 Disk 107 |
|||
|
|
|
|
|
|
|
3.3Logical Configurations
Table 3-3: Logical Configurations
DESCRIPTION |
ST250LM004 |
ST320LM001 |
ST500LM012 |
ST640LM001 |
ST750LM022 |
ST1000LM024 |
|
Total Number of |
488,397,168 |
625,142,448 |
976,773,168 |
1,250,263,728 |
1,465,149,168 |
1,953,525,168 |
|
logical sectors |
|||||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Capacity |
250GB |
320GB |
500GB |
640GB |
750GB |
1TB |
|
|
|
|
|
|
|
|
*1MB = 1,000,000 Bytes, 1GB = 1,000,000,000 Bytes
*Accessible capacity may vary as some OS uses binary numbering system for reported capacity.
Spinpoint M8 Product Manual REV 2.3 |
7 |

SPECIFICATIONS
3.4Performance Specifications
|
|
|
Table 3-4: Performance Specifications |
|||||
|
|
|
|
|
|
|
|
|
DESCRIPTION |
ST250LM004 |
ST320LM001 |
ST500LM012 |
ST640LM001 |
ST750LM022 |
ST1000LM024 |
||
|
|
|
|
|
|
|
|
|
Seek Time (RD/WRT, Typ) |
|
|
|
|
|
|
||
Average seek time |
|
|
12/14 ms |
|||||
Track to track seek time |
|
|
2/4 ms |
|||||
Full stroke seek time |
|
|
22/24 ms |
|||||
|
|
|
|
|
||||
` Average Latency |
|
|
5.6 ms |
|||||
Data Transfer Rate (Max) |
|
|
|
|
|
|
||
buffer to/from media |
|
|
145Mbits/s |
|||||
host to/from buffer |
|
|
300 MB/s |
|||||
|
|
|
|
|
|
|||
Rotational Speed |
|
|
|
5400 RPM Class |
||||
|
|
|
|
|
|
|
|
|
Startup Time |
|
Power on to |
|
|
4 sec / 8 sec |
|||
|
Drive Ready |
|
|
|||||
|
|
|
|
|||||
(Typ / Max) |
|
|
|
|
|
|
|
|
|
Standby to |
|
|
3.5 sec / 8 sec |
||||
|
|
Drive Ready |
|
|
||||
|
|
|
|
|
|
|
|
|
NOTES: Seek time is defined as the time from the receipt of a read, write or seek command until the actuator has repositioned and settled on the desired track with the drive operating at nominal DC input voltages and nominal operating temperature.
Average seek time is determined by averaging the time to complete 1,000 seeks of random length.
Average latency is the time required for the drive to rotate 1/2 of a revolution and on average is incurred after a seek completion prior to reading or writing user data.
Spin up time is the time elapsed between the supply voltages reaching operating range and the drive being ready to accept all commands.
Actual rotational speed can be different a little.
Spinpoint M8 Product Manual REV 2.3 |
8 |

SPECIFICATIONS
3.5Power consumption
Table 3-5: Power consumption
DESCRIPTION |
|
ST250LM004 |
ST320LM001 |
ST500LM012 |
ST640LM001 |
ST750LM022 |
ST1000LM024 |
Rated |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Voltage |
V |
+5 |
|
|
|||
|
|
|
|
|
|||
Current |
A |
0.85 |
|
|
|||
|
|
|
|
|
|
|
|
Power Consumption |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Start Up (25 C) |
mA |
1000 |
|
|
|||
|
|
|
|
|
|||
Low Power Idle (25 C) |
Watt |
0.7 |
|
|
|||
|
|
|
|
|
|||
Read/Write (25 C) |
Watt |
2.2 |
|
|
|||
|
|
|
|
|
|||
Seek (25 C) |
Watt |
2.0 |
|
|
|||
|
|
|
|
|
|||
Stand by (25 C) |
Watt |
0.2 |
|
|
|||
|
|
|
|
|
|||
Sleep (25 C) |
Watt |
0.2 |
|
|
|||
|
|
|
|
|
|
|
|
Power Requirements |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Tolerance For + 5V |
% |
+/- 5 |
|
|
|||
|
|
|
|
|
|||
Ripple, 0-30MHz |
mVp-p |
100 |
|
|
|||
|
|
|
|
|
|
|
|
Supply Rise Time |
us/ |
|
|
10us-100ms |
|||
msec |
|
|
|||||
|
|
|
|
|
|
|
|
Supply Fall Time |
Sec |
<5 |
|
|
|||
|
|
|
|
|
|
|
|
1)Random seek: 30% Duty cycle seek commands with logical random location.
2)Read/Write @ OD: On track Read/Write operation at OD, 256 sector commands.
Spinpoint M8 Product Manual REV 2.3 |
9 |

SPECIFICATIONS
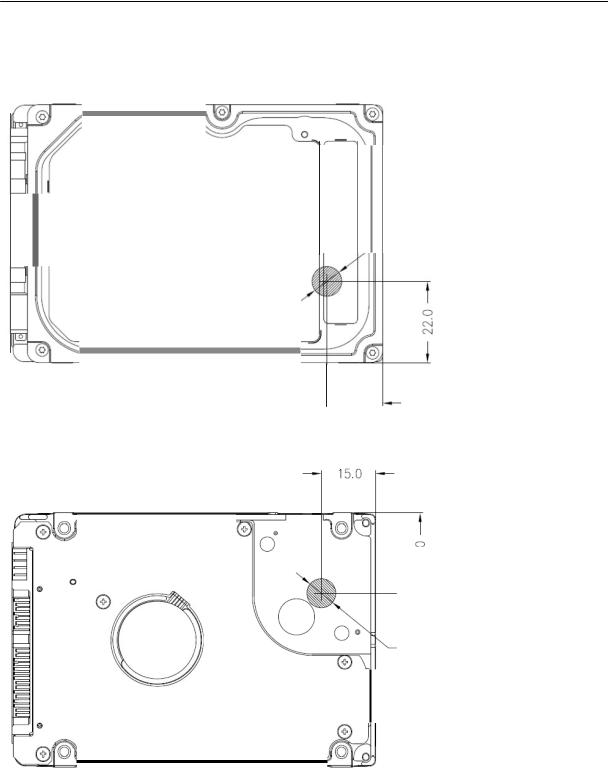
3.6Environmental Specifications
Table 3-6: Environmental Specifications
DESCRIPTION |
ST250LM004 |
ST320LM001 |
ST500LM012 |
ST640LM001 |
ST750LM022 |
ST1000LM024 |
Ambient Temperature |
(Drive temperature measured on position of figure 3-1 should be max 65C in range of |
|||||
|
|
5C-55C, specified operation temperature.) |
||||
Operating |
|
|
5 C |
|||
Non-operating |
|
|
55 C |
|||
|
|
-40 C |
||||
Max. gradient |
|
|
||||
|
|
70 C |
||||
(Temperature/Humidity) |
|
|
20 C/20%/hr |
|||
Relative Humidity (non condensing) |
|
|
|
|
|
|
Operation |
5~90 % |
|
|
|||
Non-operation |
5~95 % |
|
|
|||
Maximum wet bulb temperature |
|
|
|
|
|
|
Operating |
|
|
30 C |
|||
Non-operating |
|
|
40 C |
|||
Altitude (relative to sea level) |
|
|
|
|
|
|
Operating |
|
|
-300 ft /3000 m |
|||
Non-operating |
|
|
-400 ft / 15,000 m |
|||
|
|
|
|
|
|
|
Vibration |
|
|
|
|
|
|
Operating : |
|
|
|
|
|
|
10-500 Hz, Random : |
|
|
1.5 Grms |
|||
Non-operating : |
|
|
|
|
|
|
10-500 Hz, Random |
|
|
5.85 Grms |
|||
|
|
|
|
|
|
|
Spinpoint M8 Product Manual REV 2.3 |
10 |
SPECIFICATIONS
o
08.0
Recommended case temperature measurement position
15.0
N
N
08.0
Recommended case temperature measurement position
o
Figure 3-1:Measurement Position.
Spinpoint M8 Product Manual REV 2.3 |
11 |
|
|
|
|
|
|
|
SPECIFICATIONS |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Table 3-6: Environmental Specifications (continued) |
||||||
|
|
|
|
|
|
|
|
|
|
|
DESCRIPTION |
|
ST250LM004 |
ST320LM001 |
ST500LM012 |
ST640LM001 |
ST750LM022 |
ST1000LM024 |
|
|
|
|
|
|
|
|
|
||
Linear Shock (1/2 sine pulse) |
|
|
|
|
|
|
|
||
|
Operating |
2.0 ms |
|
|
325G |
||||
|
Non-operating |
2.0 ms |
|
|
750G |
||||
Rotational Shock |
|
|
|
|
|
|
|
|
|
|
Operating |
2.0 ms |
|
|
3K rad/sec 2 |
||||
|
Non-operating |
2.0 ms |
|
|
30K rad/sec 2 |
||||
Acoustic Noise |
|
|
|
|
|
|
|
|
|
(Typical Sound Power) |
|
|
|
|
|
|
|
||
|
Idle |
|
|
|
2.4 Bels |
||||
|
Seek |
|
|
|
2.6 Bels |
||||
|
|
|
|
|
|
|
|
|
|
3.7Reliability Specifications
|
Table 3-7: Reliability Specifications |
|||||
|
|
|
|
|
|
|
DESCRIPTION |
ST250LM004 |
ST320LM001 |
ST500LM012 |
ST640LM001 |
ST750LM022 |
ST1000LM024 |
Recoverable Read Error |
|
|
<10 in 1011 bits |
|||
Non-Recoverable Read Error |
|
|
<1 sector in 1014 bits |
|||
MTBF (POH) |
|
|
550,000 hours |
|||
|
|
|
|
|||
MTTR (Typical) |
|
|
5 minutes |
|||
|
|
|
|
|
|
|
Load/Unload Cycles |
|
|
|
|
|
|
Ambient |
600,000 |
|
|
|||
|
|
|
|
|
|
|
Spinpoint M8 Product Manual REV 2.3 |
12 |
INSTALLATION
CHAPTER 4 INSTALLATION
This chapter describes how to unpack, mount, configure and connect a Spinpoint M8 hard disk drive. It also describes how to install the drive in systems.
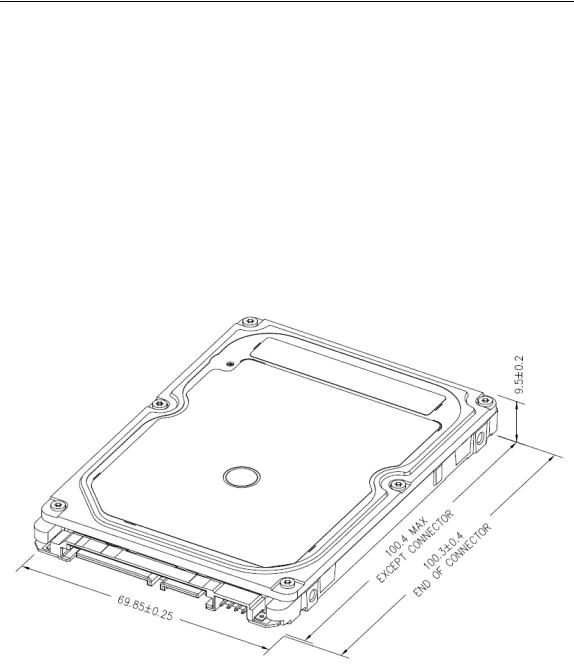
4.1Space Requirements
Figure 4-1 shows the external dimensions of the drive.
Figure 4-1: Mechanical Dimension
Spinpoint M8 Product Manual REV 2.3 |
13 |
INSTALLATION
4.2Unpacking Instructions
(1)Open the shipping container of the Spinpoint M8 hard disk drive.
(2)Lift the packing assembly that contains the drive out of the shipping container.
(3)Remove the drive from the packing assembly. When you are ready to install the drive, remove it from the ESD (Electro Static Discharge) protection bag. Take precautions to protect the drive from ESD damage after removing it from the bag.
CAUTION: During shipment and handling, the anti-static ESD protection bag
prevents electronic |
component |
damage due |
to electrostatic discharge. |
To avoid accidental |
damage to the |
drive, do not |
use a sharp instrument to |
open the ESD protection bag. |
|
|
|
(4) Save the packing material for possible future use.
4.3Mounting
Refer to your system manual for complete mounting details.
(1)Be sure that the system power is off.
(2)For mounting, use four M3 screws.
CAUTION: Torque applied to the screws is recommended to be 3.5 [kg* cm] ±0.5 (3.0 [inch *pounds] ±0.5)
Spinpoint M8 Product Manual REV 2.3 |
14 |
INSTALLATION
4.3.1Orientation
Figure 4-2 shows the physical dimensions and mounting holes located on each side of the drive. The mounting holes on Spinpoint M8 hard disk drive allow the drive to be mounted in any direction.
100.4 MAX
EXCEPT CONNECTOR
1- ----78.98 REF --- -
- 1
o
100.3±0.<
END OF CONNECTOR
o
O.:; REF -- |
|
4.9 REF |
9.4±0.JS |
OETAIL A
C/L OF |
C/L OF HDO |
'+-lHI- |
CONNECTOR |
||
|
|
'-t-llillft- |
3.5±038 -
1- ----- 90.6±02>----- |
- - 1 |
|
|
|
|
|
|
|
!l1
::i
o
OETAIL A
Figure4-2: Mounting Dimensions
Spinpoint M8 Product Manual REV 2.3 |
15 |
INSTALLATION
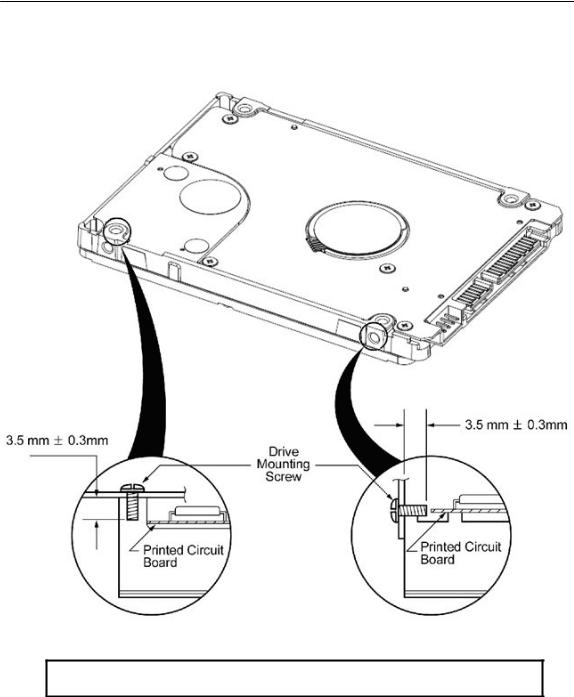
4.3.2Clearance
The printed circuit board (PCB) is designed to be very close to the mounting holes. Do not exceed the specified length for the mounting screw described in Figure 4-3. The specified screw length allows full use of the mounting-hole threads, while avoiding damage or placing unwanted stress on the PCB.
Figure 4-3: Mounting-Screw Clearance
CAUTION: Using mounting screws that are longer than the maximum lengths specified in Figure 4-3 voids the warranty of the drive.
Spinpoint M8 Product Manual REV 2.3 |
16 |
INSTALLATION
4.3.3 Ventilation
The Spinpoint M8 hard disk drive is designed to operate without the need of a cooling fan provided the ambient air temperature does not exceed 55ºC. Any user-designed cabinet must provide adequate air circulation to prevent exceeding the maximum temperature.
4.4Cable Connectors
The Interface/Power connector consists of two cables; a SATA 15-pin DC power connector, and the standard SATA 7-pin Interface connector.
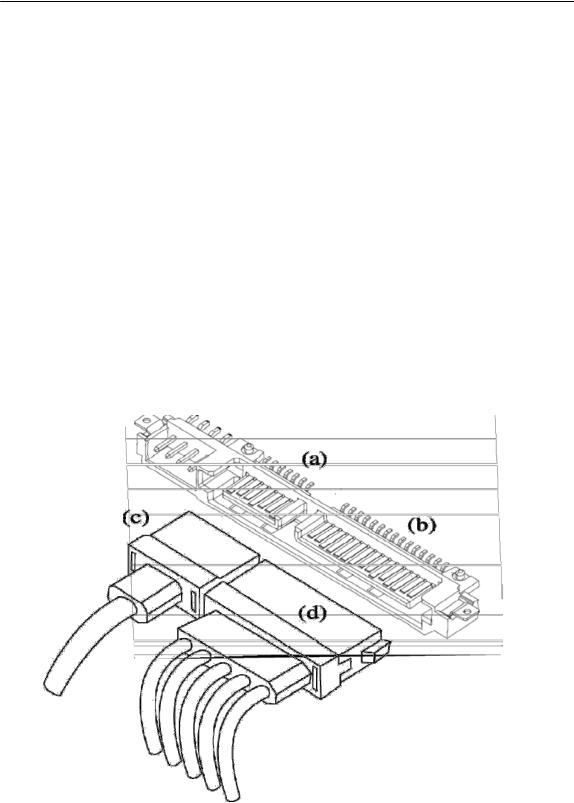
4.4.1 SATA Connectivity
The SATA interface is connected within a point to point configuration with the SATA host port. There is no master or slave relationship within the devices. Thus SATA does not require master/slave jumper. The drive interface section of the host adapter employs a new design which processed data into a serial datacontrol system.
Figure 4.4 illustrates the connection for the SATA.
There are two cables for SATA drives. One is for data transmission. The other is for power. Figure 4-4 illustrates (a) device signal plug connector, (b) device power plug connector, (c) signal cable receptacle connector mating with (a), and (d) power cable receptacle connector to be mated with (b). For more information, please refer to SATA Specifications cited in the reference.
.
Figure 4-4 Serial ATA Connector
Spinpoint M8 Product Manual REV 2.3 |
17 |

INSTALLATION
v
Computer mainboard
or ...
Serial ATA
host adapter
Figure 4-5 Connectivity to Drives
Spinpoint M8 Product Manual REV 2.3 |
18 |

INSTALLATION
Figure 4-5 illustrates Connectivity of SATA to drives. It can be used with a SATA host bus adapter (lower picture) or directly into motherboard that has the SATA built-in host bus adapter (upper picture).
SATA Device Connector Definition
Please note that all pins are in a single row, with a 1.27 mm (50 mil) pitch diameter. There are three power pins for each voltage source. One pin from each voltage is utilized for pre-charge when installed in a blindmate backplane configuration.
The notes on the mating sequence apply to the case of backplane blind mate connector.
When the drive is inserted, the ground pins and the pre-charge pins are in contact first followed by the remaining pins.
Table 4-1 lists the signals connection on the SATA interface and power connector. It is based on SATA 1.0a Specifications. Note that pin numbers is designated from the pin farthest from power segment.
Table 4-1 SATA Connector Pin Definitions
Data Signal |
Pin |
Function |
Definition |
|
|
Connector |
|
|
|
|
|
|
|
*S1 |
Ground |
Ground |
|
|
|
S2 |
Rx+ |
Differential Signal pair |
|
|
|
S3 |
Rx- |
Differential Signal pair |
|
|
|
*S4 |
Ground |
Ground |
|
|
|
S5 |
Tx- |
Differential Signal Pair |
|
|
|
S6 |
Tx+ |
Differential Signal pair |
|
|
|
*S7 |
Ground |
Ground |
|
|
|
Key and spacing separate |
|
|
|
|
|
signal and power segment |
|
|
|
Power |
P1 |
V33 |
3.3 v |
|
|
Management |
P2 |
V33 |
3.3 v |
|
|
|
|
*P3 |
V33 |
3.3 v |
|
|
|
*P4 |
Ground |
Ground |
|
|
|
*P5 |
Ground |
Ground |
|
|
|
*P6 |
Ground |
Ground |
|
|
|
*P7 |
V5 |
5 v |
|
|
|
P8 |
V5 |
5 v |
|
|
|
P9 |
V5 |
5 v |
|
|
|
*P10 |
Ground |
Ground |
|
|
|
P11 |
Device Activity |
This pin was reserved in SATA 1.0a |
|
|
|
|
/ Stagger Spin- |
|
|
|
|
|
up Control |
|
|
|
|
*P12 |
Ground |
Ground |
|
|
|
*P13 |
V12 |
12 v |
|
|
|
P14 |
V12 |
12 v |
|
|
|
P15 |
V12 |
12 v |
|
|
* First Mate |
|
|
|
|
|
|
|
|
|
|
|
Spinpoint M8 Product Manual REV 2.3 |
19 |
|
||

INSTALLATION
SATA-Bus Interface
Connector
The SATA-Bus interface connector on the drive connects the drive to an SATA host bus adapter or an onboard SATA adapter in the computer. Figures 4.6 illustrates the power, SATA, and factory use only jumper. Figure 4.7 shows pin locations on the SATA drive.
Figure 4-6 HDD Power, SATA Interface, and Factory Jumper Connector
Spinpoint M8 Product Manual REV 2.3 |
20 |
 Loading...
Loading...