


 Loading...
Loading...CNC SYSTEM
OSP-P200M
OSP-P20M
SPECIAL FUNCTION FOR MB-V/MD-V/MU-V SERIES
INSTRUCTION MANUAL
(2nd Edition)
Pub No. 5309-E-R1 (ME61-048-R2) Feb. 2007

5309-E P-(i)
SAFETY PRECAUTIONS
SAFETY PRECAUTIONS
The machine is equipped with safety devices which serve to protect personnel and the machine itself from hazards arising from unforeseen accidents. However, operators must not rely exclusively on these safety devices: they must also become fully familiar with the safety guidelines presented below to ensure accidentfree operation.
This instruction manual and the warning signs attached to the machine cover only those hazards which Okuma can predict. Be aware that they do not cover all possible hazards.
1.Precautions Relating to Installation
(1)Please be noted about a primary power supply as follows.
•Do not draw the primary power supply from a distribution panel that also supplies a major noise source (for example, an electric welder or electric discharge machine) since this could cause malfunction of the CNC unit.
•If possible, connect the machine to a ground not used by any other equipment. If there is no choice but to use a common ground, the other equipment must not generate a large amount of noise (such as an electric welder or electric discharge machine).
(2)Installation Environment
Observe the following points when installing the control enclosure.
•Make sure that the CNC unit will not be subject to direct sunlight.
•Make sure that the control enclosure will not be splashed with chips, water, or oil.
•Make sure that the control enclosure and operation panel are not subject to excessive vibrations or shock.
•The permissible ambient temperature range for the control enclosure is 5 to 40°C.
•The permissible ambient humidity range for the control enclosure is relative humidity 50% or less at 40°C (no condensation).
•The maximum altitude at which the control enclosure can be used is 1000 m (3281ft.).
2.Points to Check before Turning on the Power
(1)Close all the doors of the control enclosure and operation panel to prevent the entry of water, chips, and dust.
(2)Make absolutely sure that there is nobody near the moving parts of the machine, and that there are no obstacles around the machine, before starting machine operation.
(3)When turning on the power, turn on the main power disconnect switch first, then the CONTROL ON switch on the operation panel.

5309-E P-(ii)
SAFETY PRECAUTIONS
3.Precautions Relating to Operation
(1)After turning on the power, carry out inspection and adjustment in accordance with the daily inspection procedure described in this instruction manual.
(2)Use tools whose dimensions and type are appropriate for the work undertaken and the machine specifications. Do not use badly worn tools since they can cause accidents.
(3)Do not, for any reason, touch the spindle or tool while spindle indexing is in progress since the spindle could rotate: this is dangerous.
(4)Check that the workpiece and tool are properly secured.
(5)Never touch a workpiece or tool while it is rotating: this is extremely dangerous.
(6)Do not remove chips by hand while machining is in progress since this is dangerous. Always stop the machine first, then remove the chips with a brush or broom.
(7)Do not operate the machine with any of the safety devices removed. Do not operate the machine with any of the covers removed unless it is necessary to do so.
(8)Always stop the machine before mounting or removing a tool.
(9)Do not approach or touch any moving part of the machine while it is operating.
(10)Do not touch any switch or button with wet hands. This is extremely dangerous.
(11)Before using any switch or button on the operation panel, check that it is the one intended.
4.Precautions Relating to the ATC
(1)The tool clamps of the magazine, spindle, etc., are designed for reliability, but it is possible that a tool could be released and fall in the event of an unforeseen accident, exposing you to danger: do not touch or approach the ATC mechanism during ATC operation.
(2)Always inspect and change tools in the magazine in the manual magazine interrupt mode.
(3)Remove chips adhering to the magazine at appropriate intervals since they can cause misoperation. Do not use compressed air to remove these chips since it will only push the chips further in.
(4)If the ATC stops during operation for some reason and it has to be inspected without turning the power off, do not touch the ATC since it may start moving suddenly.
5.On Finishing Work
(1)On finishing work, clean the vicinity of the machine.
(2)Return the ATC, APC and other equipment to the predetermined retraction position.
(3)Always turn off the power to the machine before leaving it.
(4)To turn off the power, turn off the CONTROL ON switch on the operation panel first, then the main power disconnect switch.

5309-E P-(iii)
SAFETY PRECAUTIONS
6.Precautions during Maintenance Inspection and When Trouble Occurs
In order to prevent unforeseen accidents, damage to the machine, etc., it is essential to observe the following points when performing maintenance inspections or during checking when trouble has occurred.
(1)When trouble occurs, press the emergency stop button on the operation panel to stop the machine.
(2)Consult the person responsible for maintenance to determine what corrective measures need to be taken.
(3)If two or more persons must work together, establish signals so that they can communicate to confirm safety before proceeding to each new step.
(4)Use only the specified replacement parts and fuses.
(5)Always turn the power off before starting inspection or changing parts.
(6)When parts are removed during inspection or repair work, always replace them as they were and secure them properly with their screws, etc.
(7)When carrying out inspections in which measuring instruments are used - for example voltage checks - make sure the instrument is properly calibrated.
(8)Do not keep combustible materials or metals inside the control enclosure or terminal box.
(9)Check that cables and wires are free of damage: damaged cables and wires will cause current leakage and electric shocks.
(10)Maintenance inside the Control Enclosure
a.Switch the main power disconnect switch OFF before opening the control enclosure door.
b.Even when the main power disconnect switch is OFF, there may some residual charge in the MCS drive unit (servo/spindle), and for this reason only service personnel are permitted to perform any work on this unit. Even then, they must observe the following precautions.
•MCS drive unit (servo/spindle)
The residual voltage discharges two minutes after the main switch is turned OFF.
c.The control enclosure contains the NC unit, and the NC unit has a printed circuit board whose memory stores the machining programs, parameters, etc. In order to ensure that the contents of this memory will be retained even when the power is switched off, the memory is supplied with power by a battery. Depending on how the printed circuit boards are handled, the contents of the memory may be destroyed and for this reason only service personnel should handle these boards.

5309-E P-(iv)
SAFETY PRECAUTIONS
(11)Periodic Inspection of the Control Enclosure
a.Cleaning the cooling unit
The cooling unit in the door of the control enclosure serves to prevent excessive temperature rise inside the control enclosure and increase the reliability of the NC unit. Inspect the following points every three months.
•Is the fan motor inside the cooling unit working?
The motor is normal if there is a strong draft from the unit.
•Is the external air inlet blocked?
If it is blocked, clean it with compressed air.
7.General Precautions
(1)Keep the vicinity of the machine clean and tidy.
(2)Wear appropriate clothing while working, and follow the instructions of someone with sufficient training.
(3)Make sure that your clothes and hair cannot become entangled in the machine. Machine operators must wear safety equipment such as safety shoes and goggles.
(4)Machine operators must read the instruction manual carefully and make sure of the correct procedure before operating the machine.
(5)Memorize the position of the emergency stop button so that you can press it immediately at any time and from any position.
(6)Do not access the inside of the control panel, transformer, motor, etc., since they contain highvoltage terminals and other components which are extremely dangerous.
(7)If two or more persons must work together, establish signals so that they can communicate to confirm safety before proceeding to each new step.
5309-E P-(v)
SAFETY PRECAUTIONS
8.Symbols Used in This Manual
The following warning indications are used in this manual to draw attention to information of particular importance. Read the instructions marked with these symbols carefully and follow them.

 DANGER
DANGER
indicates an imminently hazardous situation which, if not avoided, will result in death or serious injury.

 WARNING
WARNING
indicates a potentially hazardous situation which, if not avoided, could result in death or serious injury.

 CAUTION
CAUTION
indicates a potentially hazardous situation which, if not avoided, may result in minor or moderate injury.

 CAUTION
CAUTION
indicates a potentially hazardous situation which, if not avoided, may result in damage to your property.
SAFETYINSTRUCTIONS
indicates general instructions for safe operation.

5309-E P-(i)
INTRODUCTION
INTRODUCTION
Thank you very much for choosing our CNC system. This numerical control system is an expandable CNC with various features. Major features of the CNC system are described below.
(1)NC operation panels
The following types of NC operation panels are offered to improve the user-friendliness.
•Color CRT operation panels
•Thin color operation panels (horizontal)
•Thin color operation panels (vertical)
One or more of the above types may not be used for some models.
(2)Machining management functions
These functions contribute to the efficient operation of the CNC system and improve the profitability from small quantity production of multiple items and variable quantity production of variations. Major control functions are described below.
a.Reduction of setup time
With increase in small-volume production, machining data setting is more frequently needed. The simplified file operation facilitates such troublesome operation. The documents necessary for setup, such as work instructions, are displayed on the CNC system to eliminate the necessity of controlling drawings and further reduce the setup time.
b.Production Status Monitor
The progress and operation status can be checked on a real-time basis on the screen of the CNC system.
c.Reduction of troubleshooting time
Correct information is quickly available for troubleshooting.
(3)Help functions
When an alarm is raised, press the help key to view the content of the alarm. This helps take quick action against the alarm.
To operate the CNC system to its maximum performance, thoroughly read and understand this instruction manual before use.
Keep this instruction manual at hand so that it will be available when you need a help.
Screens
Different screens are used for different models. Therefore, the screens used on your CNC system may differ from those shown in this manual.
5309-E P-(i)
CONTENTS
CONTENTS
SECTION 1 ROBOT/LOADER INTERFACE TYPES
SECTION 2 Chuck (Jig) Control
SECTION 3 Work Sit Confirmation
SECTION 4 OPERATION DOOR AUTO OPEN/CLOSE SPEC SECTION 5 STACKER CRANE INTERFACE
SECTION 6 DNC-C STACKER CRANE I/F FOR ETHERNET SECTION 7 SEMI-DRY COOLANT UNIT
This instruction manual consists of several specifications for peripheral devices and systems including those not selected by some users.
For details of each specification, refer to the corresponding materials such as the final specification.

|
|
5309-E P-(i) |
|
|
TABLE OF CONTENTS |
|
TABLE OF CONTENTS |
|
SECTION 1 ROBOT/LOADER INTERFACE TYPES................................................... |
1 |
|
1. |
Robot/loader Interface Types .................................................................................................. |
1 |
2. |
Automatic Mode....................................................................................................................... |
1 |
3. |
NC Operation Interlock ............................................................................................................ |
1 |
4. |
List of Input and Output Signals............................................................................................... |
3 |
|
4-1. Inputs from the Robot/loader to the NC............................................................................ |
3 |
|
4-2. Outputs from the NC to the Robot/loader ......................................................................... |
4 |
5. |
Description of Signals .............................................................................................................. |
5 |
|
5-1. Robot/loader Interface Type B.......................................................................................... |
5 |
|
5-2. Robot/loader Interface Type C ....................................................................................... |
12 |
6. |
Interlock ................................................................................................................................. |
20 |
|
6-1. Axis Interlock .................................................................................................................. |
20 |
|
6-2. APC Interlock.................................................................................................................. |
20 |
7. |
Work Condition Display Function........................................................................................... |
21 |
8. |
Parameters ............................................................................................................................ |
22 |
9. |
Automatic Power Shutdown................................................................................................... |
23 |
|
9-1. Effective Conditions........................................................................................................ |
23 |
|
9-2. Description of the Function............................................................................................. |
24 |
|
9-3. Parameters ..................................................................................................................... |
25 |
10.Input/Output Bit...................................................................................................................... |
26 |
|
SECTION 2 CHUCK (JIG) CONTROL....................................................................... |
30 |
|
1. |
No. 1 Chuck (Jig) ................................................................................................................... |
30 |
|
1-1. Clamping Modes............................................................................................................. |
30 |
|
1-2. Chuck clamp/unclamp commands.................................................................................. |
30 |
|
1-3. Chuck clamp/unclamp sequences.................................................................................. |
33 |
|
1-4. "Chuck Open/Closed" limit switches............................................................................... |
34 |
|
1-5. Work clamp/unclamp timers ........................................................................................... |
35 |
|
1-6. Timing chart.................................................................................................................... |
36 |
|
1-7. Interlocking ..................................................................................................................... |
37 |
|
1-8. Special conditions........................................................................................................... |
38 |
|
1-9. Status indicators ............................................................................................................. |
38 |
2. |
Chuck (jig) pressure switching............................................................................................... |
39 |
|
2-1. No. 1 chuck (jig).............................................................................................................. |
39 |
3. |
Chuck air blow control ........................................................................................................... |
45 |
|
3-1. Chuck air blow commands ............................................................................................. |
45 |
|
3-2. Special cases ................................................................................................................. |
45 |
4. |
Input/output signals................................................................................................................ |
46 |

|
|
5309-E P-(ii) |
|
|
TABLE OF CONTENTS |
SECTION 3 WORK SIT CONFIRMATION................................................................. |
47 |
|
1. |
Work Sit Condition Monitor .................................................................................................... |
47 |
|
1-1. M Codes ......................................................................................................................... |
47 |
|
1-2. Entering the sit condition monitoring mode .................................................................... |
47 |
|
1-3. Continuous monitoring in work sit condition monitoring mode ....................................... |
48 |
|
1-4. Exiting the sit condition monitoring mode ....................................................................... |
49 |
|
1-5. Linking the seating air blow ............................................................................................ |
50 |
|
1-6. Protection against air outlet clogging matter .................................................................. |
50 |
|
1-7. Sit condition confirmation timer ...................................................................................... |
51 |
|
1-8. Robot/loader interface .................................................................................................... |
51 |
|
1-9. Seating Error LED .......................................................................................................... |
52 |
|
1-10.Seating Alarm Reset button........................................................................................... |
52 |
|
1-11.Normally Seated LED .................................................................................................... |
52 |
2. |
Input/output signals................................................................................................................ |
53 |
SECTION 4 OPERATION DOOR AUTO OPEN/CLOSE SPEC ................................ |
54 |
|
1. |
Automatic Operation Door Functions..................................................................................... |
54 |
|
1-1. Contents of Functions..................................................................................................... |
54 |
|
1-2. Timing chart.................................................................................................................... |
57 |
|
1-3. Door status monitoring ................................................................................................... |
58 |
|
1-4. Notes .............................................................................................................................. |
58 |
2. |
Operation door closing operation with both hands ................................................................ |
59 |
|
2-1. Linking the dual-palm starting and operation door closing sequences........................... |
59 |
|
2-2. Operation door closing operation with both hands ......................................................... |
62 |
|
2-3. Ineffective M code commands........................................................................................ |
63 |
3. |
Prevention of entanglement by automatic operation door ..................................................... |
63 |
|
3-1. Content of sequence ...................................................................................................... |
63 |
4. |
Input/output signals................................................................................................................ |
64 |
SECTION 5 STACKER CRANE INTERFACE............................................................ |
65 |
|
1. |
Link Mode .............................................................................................................................. |
65 |
2. |
Description of Input/output Signals ........................................................................................ |
65 |
|
2-1. Input/output Signals List ................................................................................................. |
65 |
|
2-2. Detailed Description of Input/output Signals................................................................... |
67 |
3. |
Pallet Loading/unloading Time Chart..................................................................................... |
75 |
4. |
M334 (Work Ready) Command ............................................................................................. |
75 |
5. |
NC Operation Interlock .......................................................................................................... |
76 |
6. |
M Command for Requesting Unloading of Pallet................................................................... |
76 |
7. |
Specification for Work State Display...................................................................................... |
77 |
8. |
Optional Input/output Bit Table .............................................................................................. |
78 |
|
|
|
5309-E P-(iii) |
|
|
|
TABLE OF CONTENTS |
SECTION 6 DNC-C STACKER CRANE I/F FOR ETHERNET |
..................................79 |
||
1. |
Link Mode .............................................................................................................................. |
79 |
|
2. |
Description of Input/output Signals ........................................................................................ |
80 |
|
|
2-1. Input/output Signal List ................................................................................................... |
80 |
|
|
2-2. Input/output Signal List ................................................................................................... |
81 |
|
3. |
NC Operation Interlock .......................................................................................................... |
85 |
|
4. |
Optional Input/output Bit Table .............................................................................................. |
85 |
|
SECTION 7 SEMI-DRY COOLANT UNIT.................................................................. |
86 |
||
1. |
Semi-Dry Coolant .................................................................................................................. |
86 |
|
|
1-1. Related Commands........................................................................................................ |
86 |
|
|
1-2. M Code Command and RT Command in the Same Block ............................................. |
86 |
|
|
1-3. |
Manual Operation ........................................................................................................... |
88 |
|
1-4. |
Temporary Stop of All Coolants...................................................................................... |
88 |
|
1-5. |
Linkage with Chip Conveyor........................................................................................... |
89 |
|
1-6. |
Semi-Dry Unit Low Level Alarm...................................................................................... |
89 |

5309-E P-1
SECTION 1 ROBOT/LOADER INTERFACE TYPES
SECTION 1 ROBOT/LOADER INTERFACE TYPES
1. |
Robot/loader Interface Types |
|
|||
|
(1) Robot/loader interface type B |
|
|
||
|
This is an NC-mastered system that controls the robot/loader operations according to com- |
||||
|
mands from the NC. |
|
|
||
|
(2) Robot/loader interface type C |
|
|
||
|
This is a robot/loader-mastered system that controls the NC according to commands from the |
||||
|
robot/loader. |
|
|
|
|
|
(3) Robot/loader interface type D |
|
|
||
|
The robot/loader interface type D is designed to enable switching between the type B and the |
||||
|
type C. |
|
|
|
|
|
|
|
|
|
|
|
|
MC user parameter |
No. 21 |
Robot/loader interface type |
|
|
|
|
|
|
|
|
|
1 |
Selects the robot/loader interface type B. |
|
|
|
|
|
0 .... Robot/loader interface type C |
|
|
|
|
|
1 .... Robot/loader interface type B |
|
|
|
|
|
|
|
|
2. |
Automatic Mode |
|
|
||
"NC automatic mode" output is turned ON while the "system link switch" is kept ON in automatic operation mode. The mode when "NC automatic mode" is ON is called "automatic mode.
3.NC Operation Interlock
When the robot/loader interface type C is selected, the operations listed below, which impede the robot sequence, will be disabled when the "system link switch" is turned ON.
This function is not provided with the robot/loader interface type B.
(1)When the robot/loader interface type C is selected, the following operations will be disabled when the "system link switch" is turned ON:
•Program selection
•Schedule program selection
•Pointer movements by moving the cursor on the program screen
•Sequence stop
•Program number search
•Schedule program number search
•Return search
•New schedule program registration

5309-E P-2
SECTION 1 ROBOT/LOADER INTERFACE TYPES
(2)NC start pushbutton invalid
When the robot/loader interface type C is selected, the start pushbutton is invalid with the "system link mode" ON except for restarting after stops by single block ON, program stop or slide hold.
The following alarm will be displayed when the NC start pushbutton on the panel is pressed although it is ineffective:
"4720 Alarm D NC start pushbutton ineffective 11"
5309-E P-3
SECTION 1 ROBOT/LOADER INTERFACE TYPES
4.List of Input and Output Signals
4-1. Inputs from the Robot/loader to the NC
ME61048R0200300040001

5309-E P-4
SECTION 1 ROBOT/LOADER INTERFACE TYPES
4-2. Outputs from the NC to the Robot/loader
ME61048R0200300050001
5309-E P-5
SECTION 1 ROBOT/LOADER INTERFACE TYPES
5.Description of Signals
5-1. Robot/loader Interface Type B
5-1-1. Inputs from the Robot/loader to the NC (Type B)
Signal name |
Description |
Signal level |
|
Robot/loader abnormal |
Either of the following alarms occurs when the |
|
|
(iRTER/) |
"system link switch" is turned ON and this signal is |
|
|
|
turned OFF. |
|
|
|
The alarm level is changeable with the appropri- |
|
|
|
ate parameter. |
|
|
|
"8. Robot alarm is made alarm-C." of MC user |
|
|
|
parameter ROBOT/LOADER I/F |
|
|
|
"0": "1709 Alarm A |
external" |
|
|
"1": "3718 Alarm C |
external" |
|
|
However, this signal will not be monitored during |
|
|
|
warm-up program start wait or during NC opera- |
|
|
|
tion by warm-up program start. |
|
|
|
|
|
|
Robot/loader at retract |
The NC start pushbutton on the panel and the |
|
|
position |
"cycle start" command become ineffective when |
|
|
(iRTRF/) |
the "system link switch" is turned ON and this sig- |
|
|
|
nal is turned OFF. |
|
|
The following alarm occurs when the NC start pushbutton on the panel is pressed or the "cycle start" signal is turned ON although NC start is ineffective.
The alarm remains displayed while the NC start pushbutton on the panel is held down or the "cycle start" signal is kept ON.
"4720 Alarm DNC start ineffective 12"
However, the above interlock becomes ineffective when "2. Cycle start: STANDBY POS. I/L is made ineffective" of MC user parameter ROBOT/ LOADER I/F is set to "1."

|
|
5309-E P-6 |
|
SECTION 1 ROBOT/LOADER INTERFACE TYPES |
|
|
|
|
Signal name |
Description |
Signal level |
No material/full-work |
The operation end lamp lights while the "system |
|
(iMTNO) |
link switch" is kept ON, the operation end lamp is |
|
|
effective (described below), and this signal is kept |
|
|
ON. |
|
|
MC user parameter |
|
|
"0" is set at INDICATING LAMP (8. Operation end |
|
|
lamp is made effect): |
|
|
Operation end lamp is ineffective. |
|
|
"1" is set at INDICATING LAMP (8. Operation end |
|
|
lamp is made effect): |
|
|
Operation end lamp is effective. |
|
|
"5. Operation end lamp does not light on by M02/ |
|
|
M30" MC user parameter of ROBOT/LOADER I/F |
|
|
"0": |
|
|
The standard operation end lamp function also |
|
|
becomes effective. |
|
|
"1": |
|
|
The standard operation end lamp function |
|
|
becomes ineffective when the "system link switch" |
|
|
is turned ON. |
|
|
|
|
Preparation work com- |
The "exchange pallet (work) command" is turned |
See the left figure. |
pleted |
OFF and work preparation is completed when this |
|
(iWSFN) |
signal is turned ON. |
|
|
Note: The work preparation completed status will |
|
|
be retained even if the NC is reset or the power is |
|
|
turned ON or OFF. |
|
|
[Time chart] |
|
|
|
|
Cycle stop request |
The NC stops the ongoing cycle when this signal |
|
(iCYSP) |
is turned OFF in "automatic mode." |
|
|
|
|
Robot automatic mode |
Request 1, 2, 3 or 4 becomes effective when this |
|
(iRTGR) |
signal is turned ON in "automatic mode." |
|
|
If M311, M312, M313 or M314 is issued when this |
|
|
signal is OFF, nothing will take place, and an |
|
|
answer will be given back immediately. |
|
|
|
|

|
|
|
5309-E P-7 |
|
|
SECTION 1 ROBOT/LOADER INTERFACE TYPES |
|
|
|
|
|
Signal name |
|
Description |
Signal level |
Request answer |
The request output signal (request 1, 2, 3 or 4) is |
|
|
(iRQAS) |
turned OFF when this signal is turned ON in |
|
|
|
"automatic mode." |
|
|
|
Turn OFF this signal when the request output sig- |
|
|
|
nal is turned OFF. |
|
|
|
|
|
|
Automatic power shut- |
The power will be shut down automatically when |
|
|
down completed |
this signal is turned ON with the "automatic power |
|
|
(iPOFC) |
shutdown command" output to the robot/loader in |
|
|
|
"automatic mode." |
|
|
|
For further information, see "Automatic Power |
|
|
|
Shutdown Function". |
|
|
|
|
|
|
APC door open com- |
On the machine without APC, the operation door |
|
|
mand |
opens with this signal ON. This signal, however, |
|
|
(iDROC) |
becomes ineffective under the following condi- |
|
|
|
tions: |
|
|
|
• |
No link mode is established. |
|
|
• |
The signal "Robot/loader retract position |
|
|
|
iRTRF" is OFF. |
|
|
|
(The robot/loader interface is ineffective when |
|
|
|
"1" is set at the parameter 4. "DOOR MOVE: |
|
|
|
STANDBY POS. I/L IS MADE INEFFECTIVE" |
|
|
|
in the MC USER PARAMETER, ROBOT- |
|
|
|
LOADER I/F). |
|
|
• |
The machine is equipped with APC. |
|
|
|
|
|
APC door close com- |
On the machine without APC, the operation door |
|
|
mand |
closes with this signal ON. This signal, however, |
|
|
(iDRCS) |
becomes ineffective under the following condi- |
|
|
|
tions: |
|
|
|
• |
No link mode is established. |
|
|
• |
The signal "Robot/loader retract position |
|
|
|
iRTRF" is OFF. |
|
|
|
(The robot/loader interface is ineffective when |
|
|
|
"1" is set at the parameter 4. "DOOR MOVE: |
|
|
|
STANDBY POS. I/L IS MADE INEFFECTIVE" |
|
|
|
in the MC USER PARAMETER, ROBOT- |
|
|
|
LOADER I/F). |
|
|
• |
The machine is equipped with APC. |
|
|
|
|
|

5309-E P-8
SECTION 1 ROBOT/LOADER INTERFACE TYPES
5-1-2. Outputs from the NC to the Robot/loader (Type B)
Signal name |
|
Description |
Signal level |
NC automatic mode |
This signal is turned ON when the following condi- |
|
|
(oNCGR) |
tions are met: |
|
|
|
• |
Automatic operation mode |
|
|
• |
"System link switch" ON |
|
|
However, this signal will not be turned ON during |
|
|
|
warm-up program start wait or during NC opera- |
|
|
|
tion by warm-up program start. |
|
|
|
|
|
|
NC run |
This signal remains ON during NC operation. |
|
|
(oNRUN) |
|
|
|
|
|
|
|
A-pallet is outside of |
This signal comes ON when all the following con- |
APC sequence No. |
|
M/C |
ditions are met: |
|
|
(oPLTA) |
• |
Pallet B mode is ON. |
|
|
|
||
|
• |
Pallet A mode is ON when "1" is set at "B pal- |
|
|
|
let in M/C side, when APC Seq. No.1" of the |
|
|
|
machine user parameter CHUCK, SIT CON- |
|
|
|
FIRMATION, TAILSOTCK. |
|
|
|
|
|
B-pallet is outside of |
This signal comes ON when all the following con- |
APC sequence No. |
|
M/C |
ditions are met: |
|
|
(oPLTB) |
• |
Pallet A mode is ON. |
|
|
|
||
|
• |
Pallet B mode is ON when "1" is set at "B pal- |
|
|
|
let in M/C side, when APC Seq. No.1" of the |
|
|
|
machine user parameter CHUCK, SIT CON- |
|
|
|
FIRMATION, TAILSOTCK. |
|
|
|
|
|
Exchange pallet (work) |
This signal is turned ON upon completion of the |
See the time chart shown on |
|
command |
M60 command operation in automatic mode. |
the left. |
|
(oPCRQ) |
This signal is turned OFF with the "preparation |
|
|
|
work completed" signal turned ON. |
|
|
|
This signal will be retained even if the NC is reset |
|
|
|
or the power is turned ON or OFF. |
|
|
|
[Time chart] |
|
|
|
|
|
|

|
|
|
5309-E P-9 |
|
|
SECTION 1 ROBOT/LOADER INTERFACE TYPES |
|
|
|
|
|
Signal name |
|
Description |
Signal level |
NC alarm |
This signal is usually OFF, but will be turned ON |
An alarm (A, B or C) |
|
(oNALM) |
when an alarm (A, B or C) occurs. NC reset will |
|
|
|
turned OFF the signal again. |
|
|
|
The signal will be reversed into a B contact by |
|
|
|
hardware. |
|
|
|
|
|
|
Cycle stop request |
This signal is turned ON in one of the following |
|
|
(oCYSP) |
cases. The signal is turned OFF in other cases: |
|
|
|
• When the count of the NC work counter is full. |
|
|
|
• |
When the tool can no longer serve. |
|
|
• |
When the "no material/full-work" signal is |
|
|
|
turned ON with the "system link switch" |
|
|
|
turned ON. |
|
|
Whenever "1" is set at the MC user parameter |
|
|
|
ROBOT LOADER I/F "10. Cycle stop request sig- |
|
|
|
nal is B contact", this signal is turned ON. How- |
|
|
|
ever, it will be turned OFF in one of the above |
|
|
|
cases. (B contact output) |
|
|
|
|
|
|
Request 1 |
This signal is turned ON with the M311 command |
|
|
(M311) |
when the "robot automatic mode" signal is turned |
|
|
oREQ1 |
ON in "automatic mode." |
|
|
|
An answer will be given back with the request |
|
|
|
answer signal turned ON, and this signal will be |
|
|
|
turned OFF. |
|
|
|
|
|
|
Request 2 |
Same as request 1, except that the M command is |
|
|
(M312) |
M312. |
|
|
oREQ2 |
|
|
|
|
|
|
|
Request 3 |
Same as request 1, except that the M command is |
|
|
(M313) |
M313. |
|
|
oREQ3 |
|
|
|
|
|
|
|
Request 4 |
Same as request 1, except that the M command is |
|
|
(M314) |
M314. |
|
|
oREQ4 |
|
|
|
|
|
|
|
|
|
|
5309-E P-10 |
|
|
SECTION 1 ROBOT/LOADER INTERFACE TYPES |
|
|
|
|
|
Signal name |
|
Description |
Signal level |
Automatic power shutThis signal is turned ON after the time set by “6. |
|
||
down command |
Power shutdown time” of MC user parameter |
|
|
oPOFO |
POWER SAVE/SHUTDOWN passes away if all of |
|
|
|
the following conditions are met when the auto- |
|
|
|
matic power shutdown effective parameter (“3. |
|
|
|
‘Automatic Power Shutdown’ is made effective” of |
|
|
|
MC user parameter POWER SAVE/SHUTDOWN) |
|
|
|
or automatic power shutdown ON/OFF switch is |
|
|
|
turned ON in "automatic mode": |
|
|
|
• |
Single block OFF in automatic operation |
|
|
|
mode |
|
|
• |
During existence of the machining cycle com- |
|
|
|
pleted signal or alarm A, B or C |
|
When "Automatic power shutdown MC alone" (“9. Automatic power shutdown MC alone” of MC user parameter ROBOT LOADER I/F) is "1", this signal will not be output, and the power to the machine will be shut down.
For further information, see "SECTION 7 WORK
SET ST AUTO DOOR SPEC."
5309-E P-11
SECTION 1 ROBOT/LOADER INTERFACE TYPES
The conditions for outputting the operation door open/close confirmation signals vary with the specifications as described below:
a.With the operation door auto open/close spec
For details regarding the operation door auto open/close spec, refer to "Section 4 Operation Door Auto Open/Close Spec".
Signal name |
|
Description |
Signal level |
Operation door open |
This signal comes ON when the following condi- |
|
|
(oDROP) |
tions are met: |
|
|
|
• |
Operation door open output ON |
|
|
• |
Operation door open confirmation ON |
|
|
• |
Operation door close confirmation OFF |
|
|
|
|
|
Operation door close |
This signal comes ON when the following condi- |
|
|
(oDRCP) |
tions are met: |
|
|
•Operation door close output ON
•Operation door close confirmation ON
•Operation door open confirmation OFF
b.Without the operation auto door spec
Signal name |
|
Description |
Signal level |
Operation door open |
This signal comes ON when the following condi- |
|
|
(oDROP) |
tions are met: |
|
|
|
• |
Operation door open confirmation ON * |
|
|
• |
Operation door close confirmation OFF |
|
|
* Without the operation door auto open/close, The |
|
|
|
signal "Operation door open confirmation" is pro- |
|
|
|
vided as option. |
|
|
|
|
|
|
Operation door close |
This signal comes ON when following conditions |
|
|
(oDRCP) |
are met: |
|
|
|
• |
Front door open confirmation ON |
|
|
• |
Front door close confirmation OFF* |
|
|
* Without the operation door auto open/close |
|
|
|
spec, The signal "Operation door close confirma- |
|
|
|
tion" is provided as option. |
|
|
|
|
|
|

5309-E P-12
SECTION 1 ROBOT/LOADER INTERFACE TYPES
5-2. Robot/loader Interface Type C
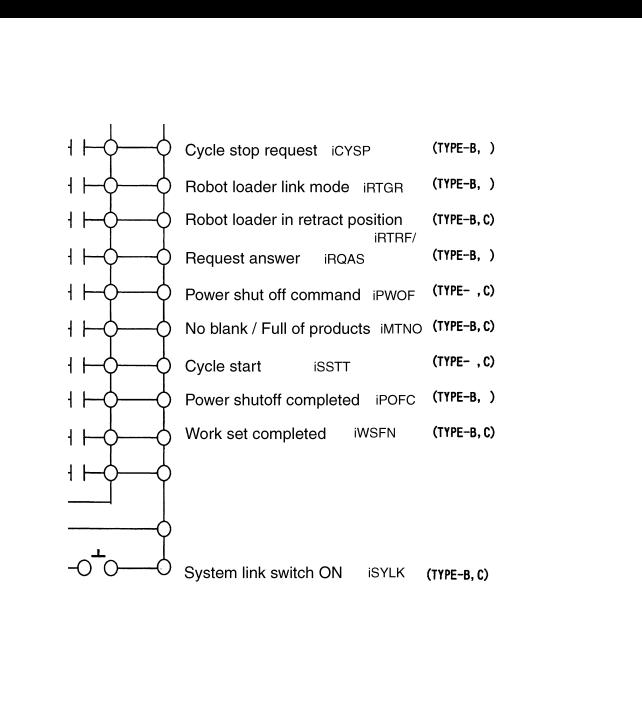
5-2-1. Inputs from the Robot/loader to the NC (Type C)
Signal name |
Description |
Signal level |
Robot/loader abnormal |
Either of the following alarms occurs when the |
|
(iRTER/) |
"system link switch" is turned ON and this signal is |
|
|
turned OFF. The alarm level is changeable with |
|
|
the appropriate parameter. |
|
|
"8. Robot alarm is made alarm C." of MC user |
|
|
parameter ROBOT LOADER I/F |
|
|
"0": "1709 Alarm A external" |
|
|
"1": "3718 Alarm C external" |
|
|
However, this signal will not be monitored during |
|
|
warm-up program start wait or during NC opera- |
|
|
tion by warm-up program start. |
|
|
|
|
Robot/loader at retract |
The NC start pushbutton on the panel and the |
|
position |
"cycle start" command become ineffective when |
|
(iRTRF/) |
the "system link switch" is turned ON and this sig- |
|
|
nal is turned OFF. |
|
|
The following alarm occurs when the NC start |
|
|
pushbutton on the panel is pressed or the "cycle |
|
|
start" signal is turned ON although NC start is inef- |
|
|
fective. |
|
|
The alarm remains displayed while the NC start |
|
|
pushbutton on the panel is held down or the "cycle |
|
|
start" signal is kept ON. |
|
|
"4720 Alarm D NC start ineffective 12" |
|
|
However, the above interlock becomes ineffective |
|
|
when "2. Cycle start: STANDBY POS. I/L is made |
|
|
ineffective" of MC user parameter ROBOT |
|
|
LOADER I/F is "1". |
|
|
|
|
|
|
|
5309-E P-13 |
|
|
SECTION 1 ROBOT/LOADER INTERFACE TYPES |
|
|
|
|
|
Signal name |
|
Description |
Signal level |
Automatic power shutThe power is automatically shut down after the |
|
||
down command |
time set by "6. Automatic power shutdown timer" |
|
|
(iPWOF) |
of MC user parameter POWER SAVE/SHUT- |
|
|
|
DOWN passes away if all of the following condi- |
|
|
|
tions are met when this signal is turned ON in |
|
|
|
"automatic mode": |
|
|
|
• |
Single block OFF in automatic operation |
|
|
|
mode |
|
|
• |
During existence of the machining cycle com- |
|
|
|
pleted signal or alarm A, B or C |
|
This signal is not affected by the automatic power shutdown effective switch ("3. 'Automatic Power Shutdown' is made effective" of MC user parameter POWER SAVE/SHUTDOWN) or automatic power shutdown ON/OFF switch.
When "6. Automatic Power shutdown switch is made effective" of MC user parameter ROBOT LOADER I/F is "1", this function becomes effective only when the automatic power shutdown effective switch ("3. 'Automatic Power Shutdown' is made effective" of MC user parameter POWER SAVE/SHUTDOWN) is set to "1" or the automatic power shutdown ON/OFF switch is set to automatic power shutdown ON.
When "4. Alarm is added as a requirement for Shutdown" of MC user parameter POWER SAVE/ SHUTDOWN is "0", the occurrence of an alarm A or B is not included in the automatic power shutdown conditions.
For further information, see "SECTION 7 WORK
SET ST AUTO DOOR SPEC."

|
|
|
5309-E P-14 |
|
|
SECTION 1 ROBOT/LOADER INTERFACE TYPES |
|
|
|
|
|
Signal name |
|
Description |
Signal level |
No material/full-work |
The operation end lamp lights while the "system |
|
|
(iMTNO) |
link switch" is kept ON, the operation end lamp is |
|
|
|
effective (described below), and this signal is kept |
|
|
|
ON. |
|
|
|
MC user parameter |
|
|
|
"0" is set at INDICATING LAMP, "8. Operation end |
|
|
|
lamp is made effect": |
|
|
|
Operation end lamp is ineffective. |
|
|
|
"1" is set at INDICATING LAMP, "8. Operation end |
|
|
|
lamp is made effect": |
|
|
|
Operation end lamp is effective. |
|
|
|
MC user parameter |
|
|
|
"5. Operation end lamp does not light on by M02/ |
|
|
|
M30" of ROBOT LOADER I/F |
|
|
|
"0": |
|
|
|
The standard operation end lamp function also |
|
|
|
becomes effective. |
|
|
|
"1": |
|
|
|
The standard operation end lamp function |
|
|
|
becomes ineffective when the "system link switch" |
|
|
|
is turned ON. |
|
|
|
|
|
|
Cycle start |
The NC starts to operate on the falling edge of this |
|
|
(iSSTT) |
signal when all of the following conditions are met: |
|
|
|
• |
"Automatic mode" |
|
|
• |
"Robot/loader at retract position" ON |
|
|
|
(The "robot/loader at retract position interlock |
|
|
|
be-comes ineffective when "2. Cycle start: |
|
|
|
STANDBY POS. I/L is made ineffective" of |
|
|
|
MC user parameter ROBOT LOADER I/F is |
|
|
|
"1".) |
|
|
|
|
|
Preparation work com- |
The "exchange pallet (work) command" is turned |
See the figure shown on the |
|
pleted |
OFF and work preparation is completed when this |
left. |
|
(iWSFN) |
signal is turned ON. |
|
|
|
Note: The work preparation completed status will |
|
|
|
be retained even if the NC is reset or the power is |
|
|
|
turned ON or OFF. |
|
|
|
|
|
|

|
|
|
5309-E P-15 |
|
|
SECTION 1 ROBOT/LOADER INTERFACE TYPES |
|
|
|
|
|
Signal name |
|
Description |
Signal level |
APC door open com- |
The APC door opens when this signal comes ON. |
|
|
mand |
However, the door does not open in any of the fol- |
|
|
(iDROC) |
lowing cases: |
|
|
|
• |
The link mode is not established. |
|
|
• |
The APC door opening M command is being |
|
|
|
executed. |
|
|
• |
The APC cycle is being conducted or the |
|
|
|
APC is not in the start position. |
|
|
• |
An alarm A is occurring. |
|
|
• |
The power save mode is established. |
|
|
• |
Machine lock is ON. |
|
|
• |
The robot/loader retract position signal |
|
|
|
iRETRF_b is OFF. |
|
|
|
(This interlock signal is ignored when "1" is |
|
|
|
set at "4. Door move: STANDBY POS. I/L is |
|
|
|
made ineffective" of the machine user param- |
|
|
|
eter ROBOT LOADER I/F). |
|
|
For details, refer to SECTION 7 "WORK SET ST |
|
|
|
AUTO DOOR SPEC." |
|
|
|
|
|
|
APC door close com- |
The APC door opens when this signal comes ON. |
|
|
mand |
However, the door does not open in any of the fol- |
|
|
(iDRCS) |
lowing cases: |
|
|
|
• |
The link mode is not established. |
|
|
• |
The APC door opening M command is being |
|
|
|
executed. |
|
|
• |
The APC cycle is being conducted or the |
|
|
|
APC is not in the start position. |
|
|
• |
An alarm A is occurring. |
|
|
• |
The power save mode is established. |
|
|
• |
Machine lock is ON. |
|
|
• |
The robot/loader retract position signal |
|
|
|
iRETRF_b is OFF. |
|
|
|
(This interlock signal is ignored when "1" is |
|
|
|
set at "4. Door move: STANDBY POS. I/L is |
|
|
|
made ineffective" of the machine user param- |
|
|
|
eter ROBOT LOADER I/F). |
|
|
For details, refer to SECTION 7 "WORK SET ST |
|
|
|
AUTO DOOR SPEC." |
|
|
|
|
|
|
5309-E P-16
SECTION 1 ROBOT/LOADER INTERFACE TYPES
5-2-2. Outputs from the NC to the Robot/loader (Type C)
Signal name |
|
Description |
Signal level |
NC automatic mode |
This signal is turned ON when the following condi- |
|
|
(oNCGR) |
tions are met: |
|
|
|
• |
Automatic operation mode |
|
|
• |
"System link switch" ON |
|
|
However, this signal will not be turned ON during |
|
|
|
warm-up program start wait or during NC opera- |
|
|
|
tion by warm-up program start. |
|
|
|
|
|
|
NC running |
This signal remains ON during NC operation. |
|
|
(oNRUN) |
|
|
|
|
|
|
|
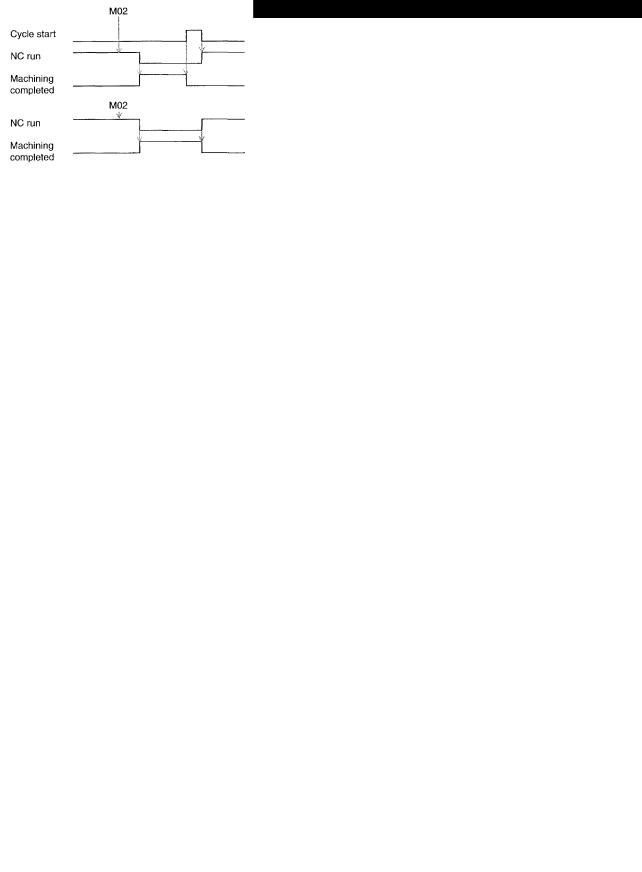
Machining cycle com- |
This signal is turned ON upon completion of NC |
See the time chart shown on |
|
pleted |
machining (at the end of M02, M30 or schedule |
the left. |
|
(oCFUTF) |
program). |
|
|
|
This signal is turned OFF on the rising edge of the |
|
|
|
cycle star switch and NC run signal. |
|
|
|
This signal will be retained even if the NC is reset |
|
|
|
or the power is turned ON or OFF. |
|
|
|
This signal does not come ON with M02 or M30 |
|
|
|
by warm-up program start. This signal does not go |
|
|
|
OFF by warm-up program start because it is not |
|
|
|
regarded as NC running. |
|
|
|
[Machining time chart] |
|
|
|
|
|
|
A-pallet is outside of |
This signal comes ON when all the following con- |
APC sequence No. |
|
M/C |
ditions are met: |
|
|
(oPLTA) |
• |
Pallet B mode is ON. |
|
|
|
||
|
• |
Pallet A mode is ON when "1" is set at "B pal- |
|
|
|
let in M/C side, when APC Seq. No.1" of the |
|
|
|
machine user parameter CHUCK, SIT CON- |
|
|
|
FIRMATION, TAILSOTCK. |
|
|
|
|
|

|
|
|
5309-E P-17 |
|
|
SECTION 1 ROBOT/LOADER INTERFACE TYPES |
|
|
|
|
|
Signal name |
|
Description |
Signal level |
B-pallet is outside of |
This signal comes ON when all the following con- |
APC sequence No. |
|
M/C |
ditions are met: |
|
|
(oPLTB) |
• |
Pallet A mode is ON. |
|
|
|
||
|
• |
Pallet B mode is ON when "1" is set at "B pal- |
|
|
|
let in M/C side, when APC Seq. No.1" of the |
|
|
|
machine user parameter CHUCK, SIT CON- |
|
|
|
FIRMATION, TAILSOTCK. |
|
|
|
|
|
Exchange pallet (work) |
This signal is turned ON upon completion of the |
See the time chart shown on |
|
command |
M60 command operation in automatic mode. This |
the left. |
|
(oPCRQ) |
signal is turned OFF with the "preparation work |
|
|
|
completed" signal turned ON. |
|
|
|
This signal will be retained even if the NC is reset |
|
|
|
or the power is turned ON or OFF. |
|
|
|
This signal will be turned OFF in a mode other |
|
|
|
than automatic mode. |
|
|
|
[Time chart] |
|
|
|
|
|
|
NC alarm |
This signal is usually OFF, but will be turned ON |
An alarm (A, B or C) |
|
(oNALM) |
when an alarm (A, B or C) occurs. NC reset will |
|
|
|
turn OFF the signal again. |
|
|
|
The signal will be reversed into a B contact by |
|
|
|
hardware. The signal is reversed by hardware. |
|
|
|
|
|
|
Cycle stop request |
This signal is turned ON in one of the following |
|
|
(oCYSP) |
cases. |
|
|
|
The signal will be turned OFF in none of the fol- |
|
|
|
lowing cases: |
|
|
|
• When the count of the NC work counter is full. |
|
|
|
• |
When the tool can no longer serve. |
|
|
• When the "no material/full-work" signal is |
"1" is set at MC user parame- |
|
|
|
turned ON with the "system link switch" |
ter ROBOT LOADER I/F"10. |
|
|
turned ON. |
Cycle stop request signal is B |
|
|
|
contact". |
|
Whenever "10. Cycle stop request signal is B con- |
|
|
|
tact" of MC user parameter ROBOT LOADER I/F |
|
|
|
is "1", this signal is turned ON. However, it will be |
|
|
|
turned OFF in one of the above cases. (B contact |
|
|
|
output) |
|
|
|
|
|
|

|
|
5309-E P-18 |
|
SECTION 1 ROBOT/LOADER INTERFACE TYPES |
|
|
|
|
Signal name |
Description |
Signal level |
Work condition 1 |
This signal comes ON when M311 is issued |
|
oREQ1 |
(immediate answer). |
|
|
This signal goes OFF at the rising edge of the |
|
|
cycle start signal or NC running signal. (The OFF |
|
|
conditions are the same with those of the machin- |
|
|
ing end signal.) |
|
|
This signal remains effective after NC reset or |
|
|
power ON/OFF. |
|
|
|
|
Work condition 2 |
This signal comes ON when M312 is issued |
|
oREQ2 |
(immediate answer). |
|
|
This signal goes OFF at the rising edge of the |
|
|
cycle start signal or NC running signal. (The OFF |
|
|
conditions are the same with those of the machin- |
|
|
ing end signal.) |
|
|
This signal remains effective after NC reset or |
|
|
power ON/OFF. |
|
|
|
|
Work condition 3 |
This signal comes ON when M313 is issued |
|
oREQ3 |
(immediate answer). |
|
|
This signal goes OFF at the rising edge of the |
|
|
cycle start signal or NC running signal. (The OFF |
|
|
conditions are the same with those of the machin- |
|
|
ing end signal.) |
|
|
This signal remains effective after NC reset or |
|
|
power ON/OFF. |
|
|
|
|
Work condition 4 |
This signal comes ON when M314 is issued |
|
oREQ4 |
(immediate answer). |
|
|
This signal goes OFF at the rising edge of the |
|
|
cycle start signal or NC running signal. (The OFF |
|
|
conditions are the same with those of the machin- |
|
|
ing end signal.) |
|
|
This signal remains effective after NC reset or |
|
|
power ON/OFF. |
|
|
|
|

5309-E P-19
SECTION 1 ROBOT/LOADER INTERFACE TYPES
The conditions for outputting the APC door open/close confirmation signals vary with the specifications as described below:
a.With the work set ST auto door spec
For details regarding the specifications for the setup station door auto open/close, refer to "Section 7 Work Set ST Auto Door Spec"
Signal name |
|
Description |
Signal level |
APC door open |
This signal comes ON when the following condi- |
|
|
(oDROP) |
tions are met: |
|
|
|
• |
APC door open output ON |
|
|
• |
APC door open confirmation ON |
|
|
• |
APC door close confirmation OFF |
|
|
|
|
|
APC door close |
This signal comes ON when the following condi- |
|
|
(oDRCP) |
tions are met: |
|
|
|
• |
APC door close output ON |
|
|
• |
APC door close confirmation ON |
|
|
• |
APC door open confirmation OFF |
|
|
|
|
|
b.Without the work set ST auto door spec
Signal name |
|
Description |
Signal level |
APC door open |
This signal comes ON when the following condi- |
|
|
(oDROP) |
tions are met: |
|
|
|
• |
APC door open confirmation ON * |
|
|
• |
APC door close confirmation OFF |
|
|
* Without work set ST auto spec, the APC door |
|
|
|
open confirmation is provided as an optional |
|
|
|
specification. |
|
|
APC door close |
This signal comes ON when following conditions |
|
|
(oDRCP) |
are met: |
|
|
|
• |
APC door open confirmation ON * |
|
|
• |
This signal comes ON when APC door close |
|
|
|
confirmation is ON. |
|
|
* Without work set ST auto spec, the APC door |
|
|
|
open confirmation is provided as an optional |
|
|
|
specification. |
|
|
Loading...