

Page 1

815 Robotic USB Sample Processor XL
Manual
8.815.8003ES
Page 2

Page 3

Metrohm AG
CH-9101 Herisau
Switzerland
Phone +41 71 353 85 85
Fax +41 71 353 89 01
info@metrohm.com
www.metrohm.com
815 Robotic USB Sample Processor
XL
Manual
8.815.8003ES 08/2010 dm
Page 4
Teachware
Metrohm AG
CH-9101 Herisau
teachware@metrohm.com
Esta documentación está protegida con derechos de autor. Todos los
derechos reservados.
Esta documentación se ha elaborado con la mayor precisión. No obstante
puede que haya algún error. Le rogamos nos informe de eventuales errores a la dirección arriba indicada.
Los documentos en otros idiomas se encuentran en
http://products.metrohm.com en Literature/Technical documenta-
tion.
Page 5

■■■■■■■■■■■■■■■■■■■■■■
Índice
1 Introducción 1
Índice
1.1 815 Robotic USB Sample Processor XL en el sistema
Titrando ................................................................................. 1
1.2 Descripción del aparato ....................................................... 2
1.2.1 Versiones ................................................................................. 3
1.2.2 Componentes del aparato ....................................................... 4
1.2.3 Uso adecuado ......................................................................... 5
1.3 Acerca de la documentación ............................................... 5
1.3.1 Convenciones gráficas ............................................................. 5
1.4 Indicaciones de seguridad ................................................... 6
1.4.1 Indicaciones generales de seguridad ........................................ 6
1.4.2 Seguridad eléctrica .................................................................. 6
1.4.3 Conexiones de tubos y capilares .............................................. 8
1.4.4 Protección de las personas ....................................................... 8
1.4.5 Disolventes y productos químicos inflamables .......................... 9
1.4.6 Reciclaje y eliminación ............................................................. 9
2 Visión conjunta del aparato 10
2.1 Parte anterior y parte posterior ........................................ 10
2.2 Panel posterior ................................................................... 12
2.3 Gradillas de muestras ......................................................... 13
3 Instalación 14
3.1 Colocar el aparato .............................................................. 14
3.1.1 Embalaje ............................................................................... 14
3.1.2 Comprobación ...................................................................... 14
3.1.3 Lugar de emplazamiento ....................................................... 14
3.2 Preparar el Sample Processor ............................................ 14
3.2.1 Conexión del cable de alimentación ....................................... 14
3.3 Conexión del ordenador .................................................... 15
3.4 Montar el Swing Head al Sample Processor .................... 17
3.4.1 Montar el Swing Head ........................................................... 17
3.4.2 Cadena para guía automática para el cable y los tubos .......... 20
3.4.3 Montar el refuerzo del brazo giratorio ................................... 22
3.5 Configurar el brazo giratorio ............................................. 23
3.6 Montar el brazo giratorio .................................................. 25
3.7 Brazos giratorios con sensor de vasos ............................. 27
3.8 Instalar el equipo de lavado y aspiración ......................... 28
815 Robotic USB Sample Processor XL
■■■■■■■■
III
Page 6

Índice
■■■■■■■■■■■■■■■■■■■■■■
3.9 Cadena para guía automática para el cable y los
tubos .................................................................................... 31
3.10 Montar el cabezal de titración .......................................... 32
3.11 Conectar el agitador de torre ............................................ 35
3.12 Conectar una bomba externa ............................................ 36
3.13 Conexión de aparatos MSB .............................................. 37
3.13.1 Conexión del dosificador ....................................................... 38
3.13.2 Conectar un agitador o un stand de titración ......................... 39
3.13.3 Conectar la Remote Box ........................................................ 40
3.14 Conexión de aparatos USB ................................................ 41
3.14.1 Conexión de un lector de código de barras ............................ 41
3.15 Montaje de la consola de soporte .................................... 42
3.16 Montar el cubeto de retención .......................................... 44
3.17 Colocación de la gradilla de muestras .............................. 45
3.18 Montar la cubierta de seguridad ....................................... 46
4 Operación y mantenimiento 47
4.1 Aspectos generales ............................................................. 47
4.2 Conservación ....................................................................... 47
4.3 Gestión de calidad y validación con Metrohm ................. 47
5 Tratamiento de problemas 48
5.1 Sample Processor ............................................................... 48
5.2 Brazo giratorio .................................................................... 48
5.3 Bomba ................................................................................. 49
6 Apéndice 50
6.1 Sensor vaso ......................................................................... 50
6.2 Toberas de lavado .............................................................. 50
6.3 Interface Remote ................................................................ 51
6.3.1 Asignación de patillas de las interfaces Remote ...................... 52
6.4 Brazos giratorios ................................................................ 53
6.4.1 Brazos giratorios para la titulación ......................................... 53
6.4.2 Brazos giratorios para la preparación de muestras .................. 56
6.4.3 Brazos giratorios para aplicaciones especiales ........................ 57
■■■■■■■■
IV
7 Características técnicas 58
7.1 Elevador y plato giratorio .................................................. 58
7.2 Bomba(s) de diafragma con válvula .................................. 58
7.3 Interfaces y conectores ...................................................... 58
815 Robotic USB Sample Processor XL
Page 7

■■■■■■■■■■■■■■■■■■■■■■
8 Declaración de conformidad y garantía 61
9 Accesorios 65
Índice
7.4 Conexión a la red ................................................................ 59
7.5 Especificaciones de seguridad .......................................... 59
7.6 Compatibilidad electromagnética (CEM) .......................... 59
7.7 Temperatura ambiente ...................................................... 60
7.8 Condiciones de referencia .................................................. 60
7.9 Dimensiones ........................................................................ 60
8.1 Declaration of Conformity ................................................. 61
8.2 Garantía ............................................................................... 62
8.3 Quality Management Principles ........................................ 63
9.1 Suministro básico 815 Robotic USB Sample Processor
XL 2.815.0010 .................................................................... 65
9.2 Suministro básico 815 Robotic USB Sample Processor
XL 2.815.0020 .................................................................... 70
9.3 Suministro básico 815 Robotic USB Sample Processor
XL 2.815.0030 .................................................................... 76
9.4 Suministro básico 815 Robotic USB Sample Processor
XL 2.815.0110 .................................................................... 78
9.5 Suministro básico 815 Robotic USB Sample Processor
XL 2.815.0120 .................................................................... 83
9.6 Suministro básico 815 Robotic USB Sample Processor
XL 2.815.0130 .................................................................... 89
9.7 Accesorios opcionales ........................................................ 91
Índice alfabético 105
815 Robotic USB Sample Processor XL
■■■■■■■■
V
Page 8

Índice de las ilustraciones
Índice de las ilustraciones
Figura 1 El sistema Titrando ............................................................................ 1
Figura 2 Parte anterior 815 Robotic USB Sample Processor XL ....................... 10
Figura 3 Parte posterior 815 Robotic USB Sample Processor XL ..................... 11
Figura 4 Regleta de clavijas ........................................................................... 12
Figura 5 Gradilla de muestras (6.2041.840) ................................................... 13
Figura 6 Conexión del cable de alimentación ................................................ 15
Figura 7 Conexión del ordenador .................................................................. 16
Figura 8 Conexión de Swing Head ................................................................ 18
Figura 9 Montar la extensión de torre ........................................................... 19
Figura 10 Montar el Swing Head a la extensión de torre ................................. 20
Figura 11 Cadena para guía automática: apertura de los eslabones de la
cadena ............................................................................................ 21
Figura 12 Montar el refuerzo del brazo giratorio 6.2058.090 .......................... 22
Figura 13 Modelos estándar de brazos giratorios ............................................ 23
Figura 14 Configuración de los brazos giratorios ............................................. 24
Figura 15 Tornillo de tope en el brazo giratorio ............................................... 25
Figura 16 Montar el brazo giratorio ................................................................ 26
Figura 17 Conectar el sensor de vasos (ejemplo 6.1462.150) .......................... 27
Figura 18 Montar los tubos de lavado y aspiración .......................................... 29
Figura 19 Montar el distribuidor ...................................................................... 30
Figura 20 Cadena para guía automática: apertura de los eslabones de la
cadena ............................................................................................ 31
Figura 21 Instalación de los tubos de lavado y la punta de aspiración .............. 33
Figura 22 Instalación del agitador y electrodo ................................................. 34
Figura 23 Agitador de hélice 802 Stirrer .......................................................... 35
Figura 24 Agitador magnético 741 Stirrer ....................................................... 35
Figura 25 Conexión del agitador de torre ........................................................ 35
Figura 26 Conectar la bomba .......................................................................... 36
Figura 27 Conectar los dosificadores ............................................................... 38
Figura 28 Conectar un agitador MSB .............................................................. 39
Figura 29 Agitador de hélice y stand de titración ............................................. 39
Figura 30 Conectar la Remote Box .................................................................. 40
Figura 31 Conectores de puerto USB .............................................................. 41
Figura 32 Montaje de la consola de soporte .................................................... 43
Figura 33 Instalar el cubeto de retención ........................................................ 44
Figura 34 Colocación de la gradilla ................................................................. 45
Figura 35 Montar la cubierta de seguridad ...................................................... 46
Figura 36 Sensor vaso en la torre .................................................................... 50
Figura 37 Toberas de atomización - Funcionamiento ....................................... 51
Figura 38 Conectores de la Remote Box .......................................................... 51
Figura 39 Asignación de patillas de la toma y del enchufe Remote .................. 52
■■■■■■■■■■■■■■■■■■■■■■
■■■■■■■■
VI
815 Robotic USB Sample Processor XL
Page 9
■■■■■■■■■■■■■■■■■■■■■■
MSB
USB
Controller
PC Keyboard
Barcode
Reader
USB Hub
RS-232/USB Box
Balance
Touch Control
USB Sample Processor
Robotic Titrosampler
Printer
Bluetooth USB
Adapter
Personal Computer
Relay Box
Remote Box
Dosing Interface
USB Lab Link
Stirrer / Ti Stand Dosino Dosimat
On
Status
8
05
D
o
s
i
m
a
M
e
t
r
o
h
On
Titrando
pH Module
Conductivity Module
1 Introducción
1 Introducción
1.1 815 Robotic USB Sample Processor XL en el sistema Titrando
815 Robotic USB Sample Processor XL es una parte del sistema modular
Titrando. El aparato se maneja o bien a través de un Touch Control con
una pantalla táctil (titrador "Stand-alone") o a través de un ordenador con
el software correspondiente.
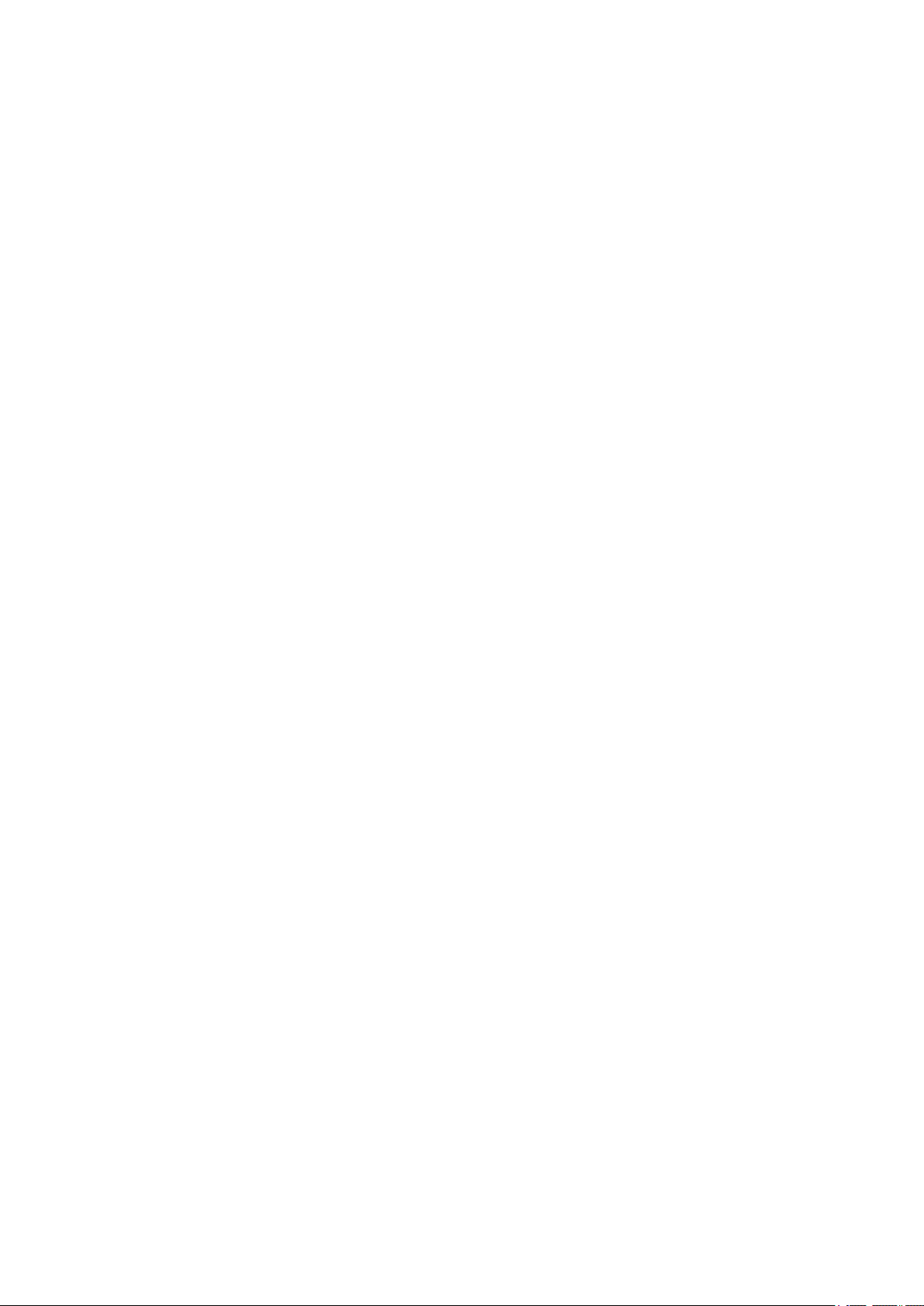
Un sistema Titrando puede incluir varios aparatos de distintos tipos. En la
figura siguiente se ofrece una visión conjunta de los aparatos periféricos
que pueden conectarse a 815 Robotic USB Sample Processor XL.
815 Robotic USB Sample Processor XL
Figura 1 El sistema Titrando
■■■■■■■■
1
Page 10

1.2 Descripción del aparato
Con PC Control/Touch Control se pueden controlar hasta 3 aparatos de
control (Titrandos, Dosing Interfaces, USB Sample Processors, etc.)
mediante una conexión USB. Con el software tiamo, el sistema puede
ampliarse a voluntad con otros aparatos de control.
Las actualizaciones del software del aparato se describen en el manual de
PC Control / Touch Control o en la ayuda de tiamo, respectivamente.
1.2 Descripción del aparato
815 Robotic USB Sample Processor XL es un aparato multifuncional y versátil. Se concibió para su uso en operaciones y en el laboratorio y ofrece
una amplia gama de aplicaciones.
Mediante la incorporación de interfaces de alto rendimiento, se añade de
forma sencilla a los sistemas Titrando de Metrohm. De esta forma, las
amplias posibilidades de comunicación del sistema Titrando (remote box,
conexión LIMS, etc.) pueden utilizarse en su totalidad. Estas capacidades
hacen que 815 Robotic USB Sample Processor XL pueda emplearse en
toda clase de tareas de automatización de un laboratorio, especialmente
en un sistema de datos de laboratorio de elevada integración.
■■■■■■■■■■■■■■■■■■■■■■
La interface de usuario de Touch Control o del software tiamo™ garantizan un manejo y programación cómodos de 815 Robotic USB Sample Processor XL. De esta forma, las instrucciones y la gran diversidad de posibilidades de configuración pueden utilizarse de forma eficiente y sencilla. La
inclusión en el sistema Titrando garantiza, asimismo, la total conformidad
del sistema de automatización con las directrices de la FDA (Federal Drug
Administration, por su forma en inglés), especialmente con la directriz 21
CFR parte 11, "Electronic records and signatures".
Existen gradillas de muestra estándar intercambiables para muchos tamaños de vaso. Asimismo, se pueden definir posiciones para vasos de lavado
o acondicionamiento para cada gradilla, por ejemplo.
Con el montaje de un 786 Swing Head, la cifra de pruebas editables en
una gradilla puede aumentar de forma considerable. Los brazos giratorios
para 786 Swing Head permiten alcanzar cualquier punto de una gradilla
de muestras que se desee. De este modo se pueden elegir prácticamente
con total libertad la cantidad (máx. 999 posiciones de gradilla) y la distribución de las muestras.
Asimismo, se pueden elaborar bajo pedido gradillas especiales según las
necesidades individuales del cliente.
■■■■■■■■
2
815 Robotic USB Sample Processor XL
Page 11
■■■■■■■■■■■■■■■■■■■■■■
1.2.1 Versiones
1 Introducción
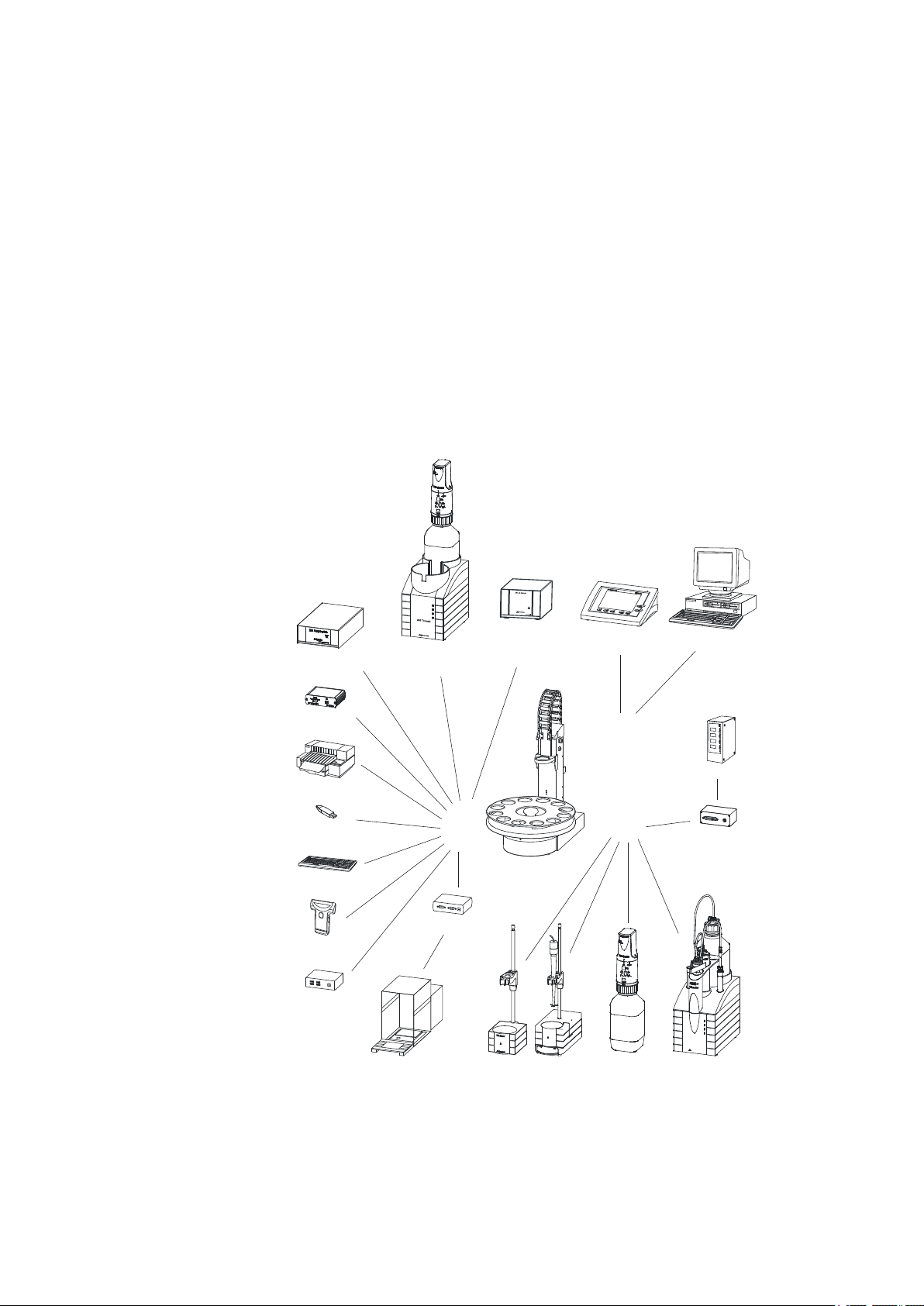
815 Robotic USB Sample Processor XL está disponible en las variantes que
se detallan a continuación con distintos componentes.
2.815.0010
Versión con 1 torre
■ 1 bomba de diafragma y 1 válvula
■ 1 conector para una bomba externa
■ 1 conector de agitador (agitador de torre)
■ Conector 1 para Swing Head
■ 3 conectores MSB para dosificador o agitador
■ 2 conectores USB
■ 1 conector controlador
2.815.0020
Versión con 1 torre
■ 2 bombas de diafragma y 2 válvulas
■ 1 conector de agitador (agitador de torre)
■ Conector 1 para Swing Head
■ 3 conectores MSB para dosificador o agitador
■ 2 conectores USB
■ 1 conector controlador
2.815.0030
Versión con 1 torre
■ 2 conectores para bombas externas
■ 1 conector de agitador (agitador de torre)
■ Conector 1 para Swing Head
■ 3 conectores MSB para dosificador o agitador
■ 2 conectores USB
■ 1 conector controlador
815 Robotic USB Sample Processor XL
■■■■■■■■
3
Page 12
1.2 Descripción del aparato
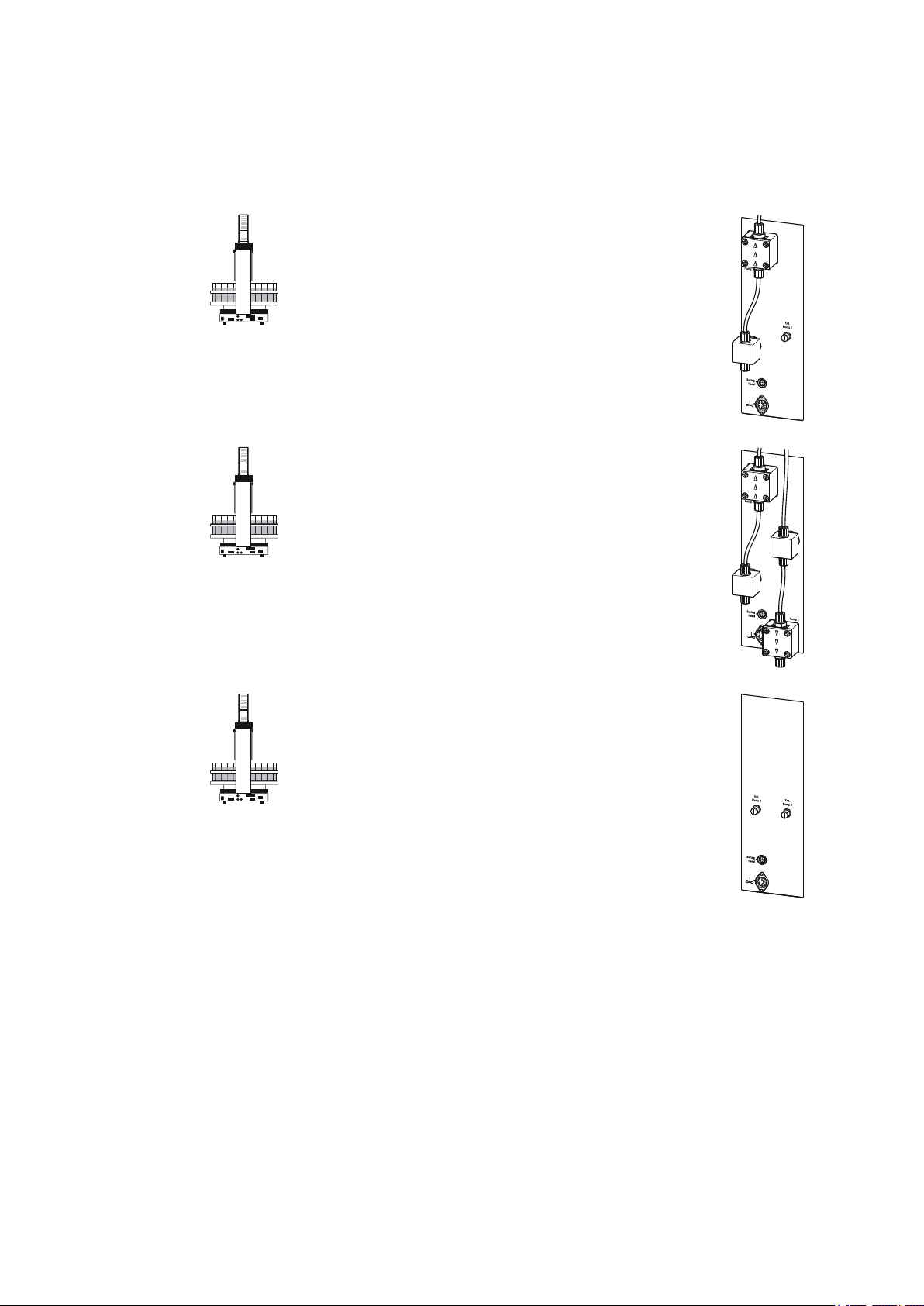
2.815.0110
Versión con 2 torres
■ 2 bombas de diafragma y 2 válvulas
■ 2 conectores para bombas externas
■ 2 conectores de agitador (agitador de torre)
■ 2 conectores Swing Head
■ 3 conectores MSB para dosificador o agita-
dor
■ 2 conectores USB
■ 1 conector controlador
2.815.0120
Versión con 2 torres
■ 4 bombas de diafragma y 4 válvulas
■ 2 conectores de agitador (agitador de torre)
■ 2 conectores Swing Head
■ 3 conectores MSB para dosificador o agita-
dor
■ 2 conectores USB
■ 1 conector controlador
■■■■■■■■■■■■■■■■■■■■■■
2.815.0130
Versión con 2 torres
■ 4 conectores para bombas externas
■ 2 conectores de agitador (agitador de torre)
■ 2 conectores Swing Head
■ 3 conectores MSB para dosificador o agita-
dor
■ 2 conectores USB
■ 1 conector controlador
1.2.2 Componentes del aparato
815 Robotic USB Sample Processor XL tiene los componentes siguientes:
■ Bandeja de muestras
Para gradilla de muestras con un diámetro de hasta 48 cm.
■ Una o dos torres con elevador
Con soporte de cabezal de titración. Los elevadores pueden equiparse
posteriormente con el Swing Head y el brazo giratorio que se elija.
■ Una, dos o ninguna bomba de diafragma por torre
En lugar de una bomba incorporada está disponible, en función de la
versión de aparato, un conector de bomba.
■■■■■■■■
4
815 Robotic USB Sample Processor XL
Page 13
■■■■■■■■■■■■■■■■■■■■■■
■ Un conector de agitador por torre
Para conectar un agitador de hélice (802 Stirrer) o un agitador magnético (741 Stirrer).
■ Conector controlador
Para conectar un ordenador o Touch Control.
■ Dos conectores USB
Para conectar una impresora, un lector de código de barras o otros
aparatos de control (Titrando, Dosing Interface, etc.).
■ Tres conectores MSB (Metrohm Serial Bus)
Para conectar dosificadores (Dosimat con unidad intercambiable o
Dosino con unidad de dosificación), agitadores o Remote Boxes.
1.2.3 Uso adecuado
815 Robotic USB Sample Processor XL está concebido para el uso como
sistema de automatización en laboratorios analíticos. La versión estándar
no resulta adecuada para su uso en el ámbito bioquímico, biológico o
médico.
Este aparato es adecuado para procesar productos químicos y muestras
combustibles. Por ello, para poder utilizar el 815 Robotic USB Sample Processor XL es necesario que el usuario tenga conocimientos básicos y experiencia con el manejo de sustancias tóxicas y corrosivas. Asimismo, se
requieren conocimientos sobre la aplicación de las medidas de prevención
de incendios prescritas en los laboratorios.
1 Introducción
1.3 Acerca de la documentación
Atención
Lea la presente documentación atentamente antes de poner el aparato
en funcionamiento. Esta documentación contiene información y advertencias que el usuario debe respetar a fin de garantizar la seguridad
durante el funcionamiento del aparato.
1.3.1 Convenciones gráficas
En la presente documentación se emplean los siguientes símbolos y formatos:
Referencia cruzada a la leyenda de una figura
El primer número se refiere al número de la figura y
el segundo, al elemento del aparato indicado en la
figura.
815 Robotic USB Sample Processor XL
■■■■■■■■
5
Page 14
1.4 Indicaciones de seguridad
■■■■■■■■■■■■■■■■■■■■■■
Paso de una instrucción
Realice estos pasos de forma sucesiva.
Advertencia
Este símbolo advierte de un posible peligro de
muerte o de sufrir lesiones.
Advertencia
Este símbolo advierte del riesgo de sufrir una descarga eléctrica.
Advertencia
Este símbolo advierte del peligro por calor o piezas
calientes.
Advertencia
Este símbolo advierte de un posible peligro biológico.
Atención
Este símbolo advierte de un posible deterioro de los
aparatos o de sus componentes.
Nota
Este símbolo señala información y sugerencias adicionales.
1.4 Indicaciones de seguridad
1.4.1 Indicaciones generales de seguridad
Advertencia
Este aparato sólo se puede operar según las indicaciones contenidas en
esta documentación.
Este aparato ha salido de la fábrica en perfecto estado en lo que se refiere
a la seguridad técnica. Para mantener el aparato en este estado y manejarlo sin peligro deberán observarse las siguientes indicaciones.
1.4.2 Seguridad eléctrica
La seguridad eléctrica para el manejo del aparato queda garantizada conforme al estándar internacional IEC 61010.
■■■■■■■■
6
815 Robotic USB Sample Processor XL
Page 15
■■■■■■■■■■■■■■■■■■■■■■
1 Introducción
Advertencia
Tan sólo el personal cualificado de Metrohm está autorizado a realizar
trabajos de mantenimiento en los componentes electrónicos.
Advertencia
No abra nunca la carcasa del aparato, ya que podría dañarlo. También
existe el peligro de sufrir lesiones de consideración si se tocan componentes bajo tensión eléctrica.
En el interior de la carcasa no hay ninguna pieza cuyo mantenimiento o
sustitución pueda realizar el usuario.
Tensión de red
Advertencia
Una tensión de red incorrecta puede dañar el aparato.
Utilice este aparato solamente con la tensión de red especificada para
ello (véase la parte posterior del aparato).
Protección contra cargas estáticas
Advertencia
Los componentes electrónicos son sensibles a las cargas estáticas y pueden ser destruidos por el efecto de las descargas.
Desenchufe siempre el cable de alimentación de la toma de conexión a
la red antes de conectar o desconectar dispositivos eléctricos en la parte
posterior del aparato.
815 Robotic USB Sample Processor XL
■■■■■■■■
7
Page 16
1.4 Indicaciones de seguridad
1.4.3 Conexiones de tubos y capilares
Atención
Conexiones de tubos y capilares no estancas están un riesgo de seguridad. Apriete bien todas las conexiones a mano. Evitar emplear violencia
excesiva con conexiones de tubos. Extremos de tubos dañados provocan fugas. Al aflojar conexiones, herramientas adecuadas se pueden
utilizar.
Revisar con regularidad la estanqueidad de las conexiones. Si el aparato
se utiliza preponderante en operación sin vigilancia, comprobaciones
semanales son indispensables.
1.4.4 Protección de las personas
Advertencia
■■■■■■■■■■■■■■■■■■■■■■
Póngase unas gafas de protección y ropa de trabajo adecuada para trabajar en el laboratorio mientras maneje el 815 Robotic USB Sample Processor XL. También es recomendable llevar guantes en caso de que se
utilicen líquidos corrosivos o por si se rompen recipientes de vidrio.
Advertencia
Antes de utilizar el aparato por primera vez es imprescindible montar la
cubierta de seguridad que se incluye en el suministro. No se permite
retirar las cubiertas de seguridad ya montadas.
El 815 Robotic USB Sample Processor XL no se debe utilizar sin la
cubierta de seguridad.
Advertencia
Durante el funcionamiento no se debe manipular la zona de trabajo del
aparato.
Existe un peligro considerable de sufrir lesiones para el usuario.
■■■■■■■■
8
815 Robotic USB Sample Processor XL
Page 17
■■■■■■■■■■■■■■■■■■■■■■
1 Introducción
Advertencia
En caso de que se bloquee un accionamiento, se debe desconectar el
cable de red inmediatamente. No intente sacar recipientes de muestras
u otras piezas que se hayan quedado atascadas si el aparato está
conectado. Solamente se puede desbloquear el aparato si éste está desconectado de la red; de otro modo hay un peligro considerable de
sufrir lesiones.
Advertencia
La versión estándar del 815 Robotic USB Sample Processor XL no es
adecuada para el uso en el ámbito bioquímico, biológico o médico.
Es necesario adoptar las medidas de protección apropiadas en caso de
que se procesen muestras o reactivos potencialmente infecciosos.
1.4.5 Disolventes y productos químicos inflamables
Advertencia
Al trabajar con disolventes y productos químicos inflamables se deben
observar las medidas de seguridad correspondientes.
■ Instale el aparato en un lugar bien ventilado.
■ Mantenga alejadas del lugar de trabajo todas las fuentes de encen-
dido.
■ Elimine de inmediato los líquidos y materias sólidas derramados.
■ Siga las indicaciones de seguridad del fabricante de los productos
químicos.
1.4.6 Reciclaje y eliminación
Este producto pertenece a la Directiva 2002/96/CE del Parlamento Europeo y del Consejo, Directiva RAEE sobre residuos de aparatos eléctricos y
electrónicos.
La correcta eliminación de su aparato usado ayuda a evitar los efectos
negativos sobre el medio ambiente y la salud.
Podrá obtener más información sobre la eliminación de sus aparatos a través de las autoridades locales, de un servicio de recogida o del comercio
distribuidor.
815 Robotic USB Sample Processor XL
■■■■■■■■
9
Page 18
2.1 Parte anterior y parte posterior
1
2
3
4
5
6
7
8
9
2 Visión conjunta del aparato
2.1 Parte anterior y parte posterior
■■■■■■■■■■■■■■■■■■■■■■
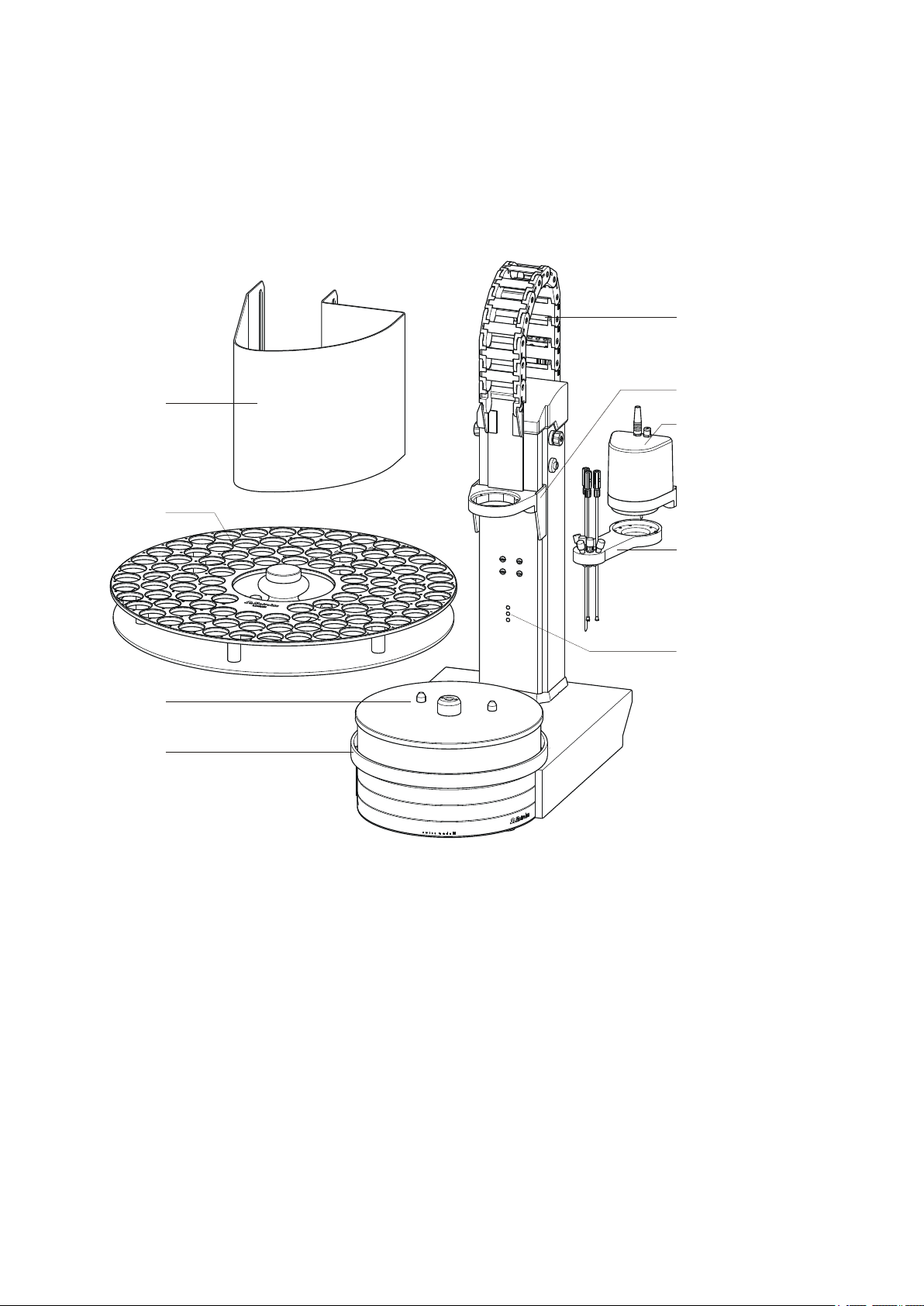
Figura 2 Parte anterior 815 Robotic USB Sample Processor XL
■■■■■■■■
10
815 Robotic USB Sample Processor XL
Page 19
■■■■■■■■■■■■■■■■■■■■■■
USB 2
1
2
3
4
5
6
7
8
T1
T2
2 Visión conjunta del aparato
Cubierta de seguridad (6.2751.100)
1
Para obtener información sobre otros modelos, véase el cap. Accesorios.
Plato giratorio
3
Con clavijas guía.
Cadena para guía automática
5
Para cables y tubos.
786 Swing Head (2.786.0040)
7
Accionamiento para brazo giratorio.
Sensor vaso
9
Gradilla de muestras (6.2041.800)
2
Para obtener información sobre otros modelos, véase el cap. Accesorios.
Riel para agitador
4
Para agitadores magnéticos (741 Stirrer.)
Elevador
6
Con soporte para cabezal de titración.
Brazo giratorio (6.1462.050)
8
Con puntas de aspiración y dosificación.
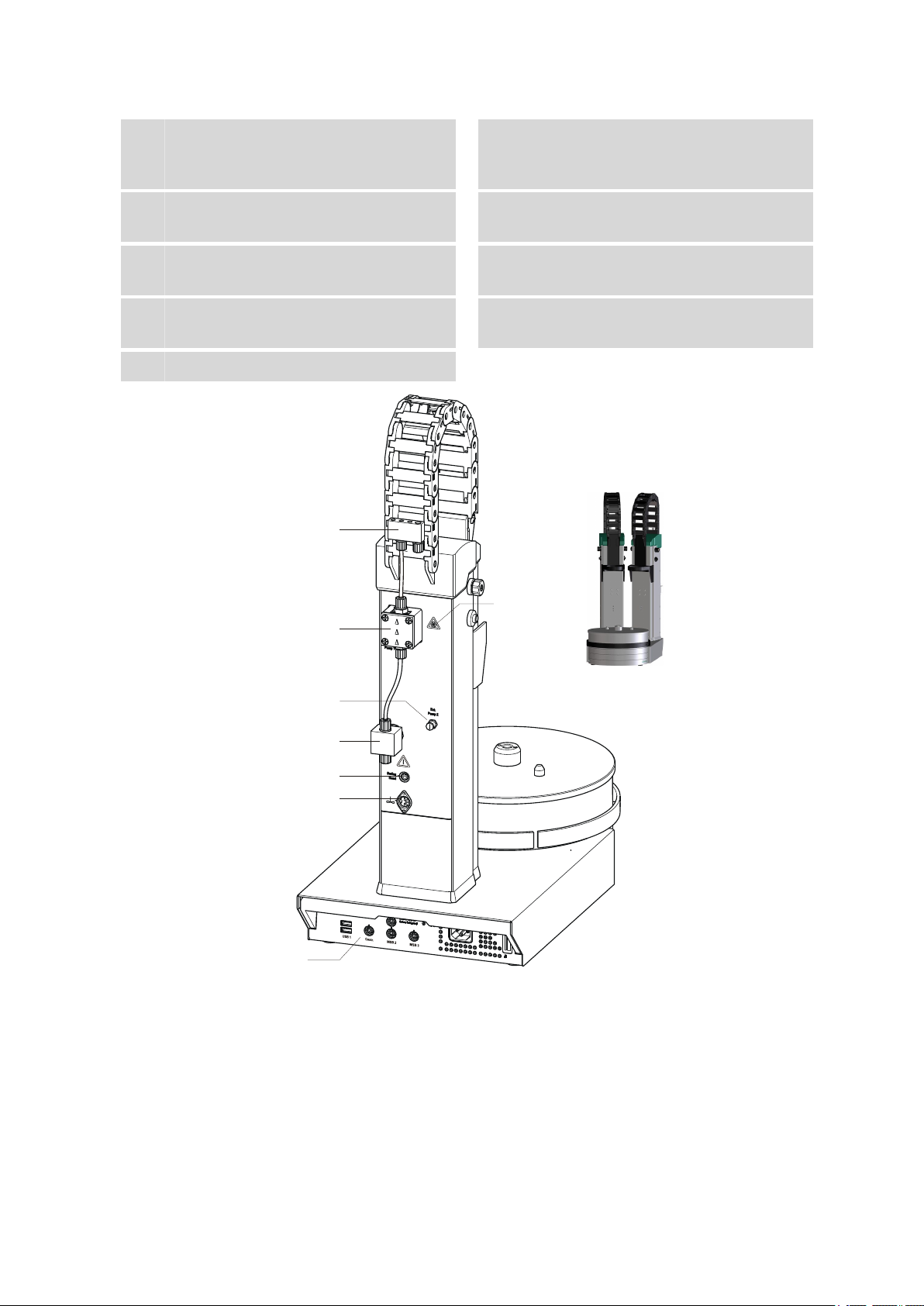
Figura 3 Parte posterior 815 Robotic USB Sample Processor XL
815 Robotic USB Sample Processor XL
■■■■■■■■
11
Page 20
2.2 Panel posterior
USB 2
USB 1
Contr.
MSB 1
MSB 2
MSB 3
Made by Metrohm
Herisau Switzerland
P: 115W U: 100 - 240 V f: 50 - 60 Hz
WARNING - Fire Hazard -
For continued protection replace only
with the same type and rating of fuse
Nr.
1 2 3 4 5
■■■■■■■■■■■■■■■■■■■■■■
Distribuidor
1
Para equipo de lavado.
Conector de bomba
3
Bomba 2. Para una bomba externa.
Conector para Swing Head
5
Tomas Mini DIN (de 9 polos).
Panel posterior con conectores
7
Torre 1
T1
En un modelo de 2 torres.
2.2 Panel posterior
Bomba de diafragma
2
Bomba 1.
Válvula de bomba
4
Conector de agitador
6
Toma DIN. Para agitador de hélice (802 Stirrer) o agitador magnético (741 Stirrer).
Símbolo de advertencia
8
(véase Capítulo 1.4.4, página 8)
Torre 2
T2
En un modelo de 2 torres.
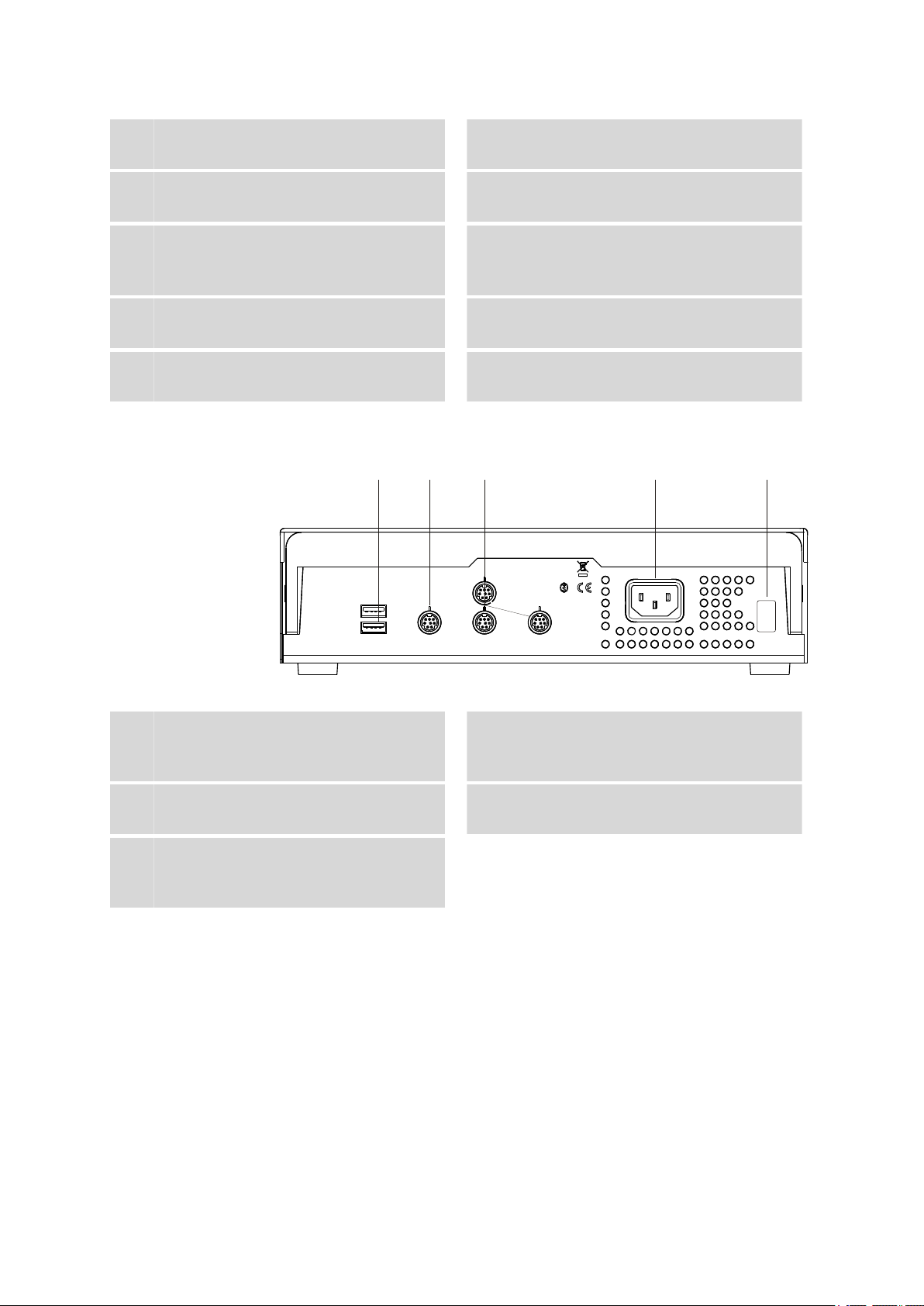
Figura 4 Regleta de clavijas
Conectores USB
1
Conectores MSB
3
Para agitador, dosificador, Remote Box.
Placa de características
5
Contiene datos sobre la tensión de red y el
número de serie.
2
4
Conector controlador
Para conexión al ordenador o Touch Control.
Toma de conexión a la red
12
■■■■■■■■
815 Robotic USB Sample Processor XL
Page 21
■■■■■■■■■■■■■■■■■■■■■■
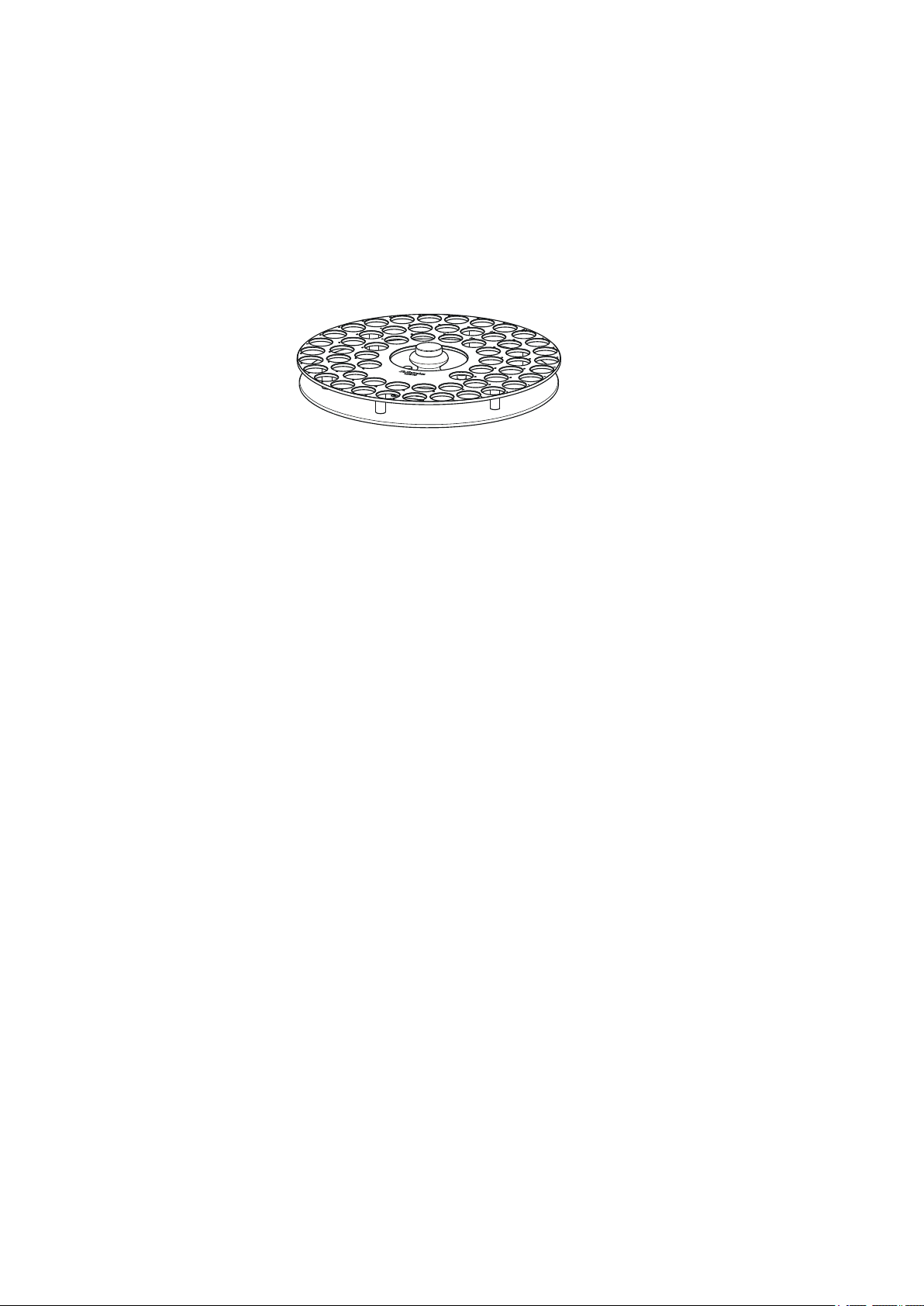
2.3 Gradillas de muestras
Una gradilla de muestras es un plato giratorio en el que se pueden colocar
recipientes de muestras. Hay gradillas de muestras de distintas clases disponibles para diversas cantidades y clases de recipientes de muestras.
El 815 Robotic USB Sample Processor XL es compatible con gradillas de
muestras con un diámetro máximo de 48 cm.
Figura 5 Gradilla de muestras (6.2041.840)
Se pueden suministrar otras gradillas definidas por el usuario; asimismo, se
pueden cargar y configurar los datos de gradilla requeridos en el programa de control. Las gradillas se pueden disponer en la posición que se
desee.
2 Visión conjunta del aparato
Códigos magnéticos
Cada gradilla de muestras se puede identificar de forma unívoca mediante
un código magnético. De este modo el Sample Processor puede identificar
automáticamente la gradilla montada.
Cuando se cambia una gradilla, primero se debe mover a la posición inicial
mediante la función Inicializar gradilla (véase "Control manual" en el
programa de control). De este modo es posible identificar la gradilla de
forma unívoca y posicionar los vasos correctamente. Cada clase de gradilla
tiene asignada una tabla de posiciones en la que se definen las posiciones
de gradilla.
815 Robotic USB Sample Processor XL
■■■■■■■■
13
Page 22
3.1 Colocar el aparato
3 Instalación
3.1 Colocar el aparato
3.1.1 Embalaje
El aparato se suministra en un embalaje especial de excelentes propiedades de protección junto con los accesorios empaquetados aparte. Conserve estos embalajes, ya que sólo con ellos se garantiza un transporte
seguro del aparato.
3.1.2 Comprobación
En cuanto reciba el aparato, compruebe con ayuda del albarán de entrega
que el envío está completo y que ha llegado sin sufrir daños.
3.1.3 Lugar de emplazamiento
El aparato ha sido desarrollado para la operación en interiores y no se permite su utilización en entornos potencialmente explosivos.
■■■■■■■■■■■■■■■■■■■■■■
Ubique el aparato en un lugar del laboratorio favorable para el manejo y
sin vibraciones, protegido de atmósferas corrosivas y de la contaminación
por productos químicos.
Se recomienda proteger el aparato de los cambios excesivos de temperatura y de la irradiación solar directa.
3.2 Preparar el Sample Processor
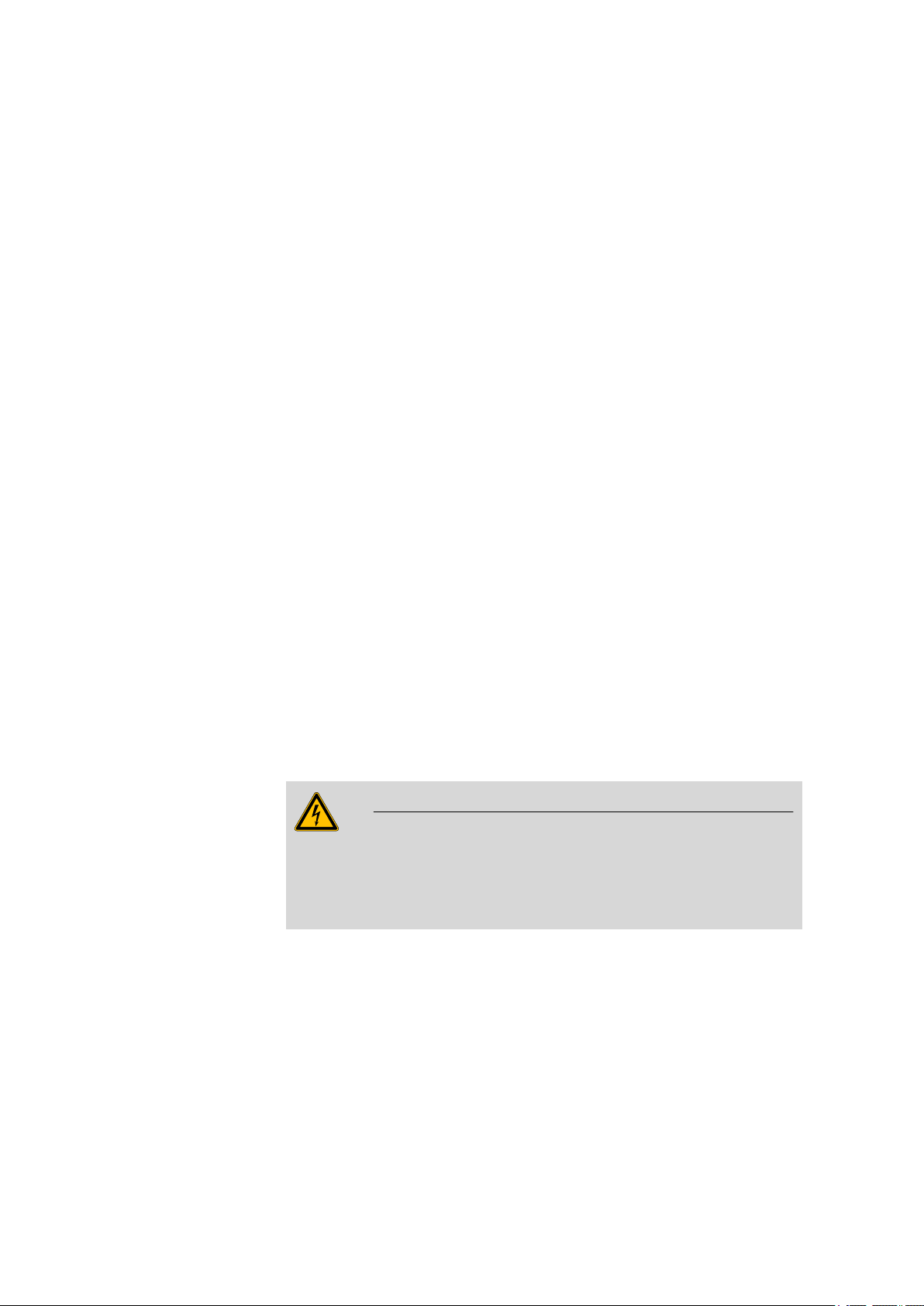
3.2.1 Conexión del cable de alimentación
Advertencia
Este aparato sólo se debe poner en funcionamiento de acuerdo con las
tensiones de red especificadas (véase la parte posterior del aparato).
Proteja las tomas de conexión de los efectos de la humedad.
■■■■■■■■
14
815 Robotic USB Sample Processor XL
Page 23
■■■■■■■■■■■■■■■■■■■■■■
Figura 6 Conexión del cable de alimentación
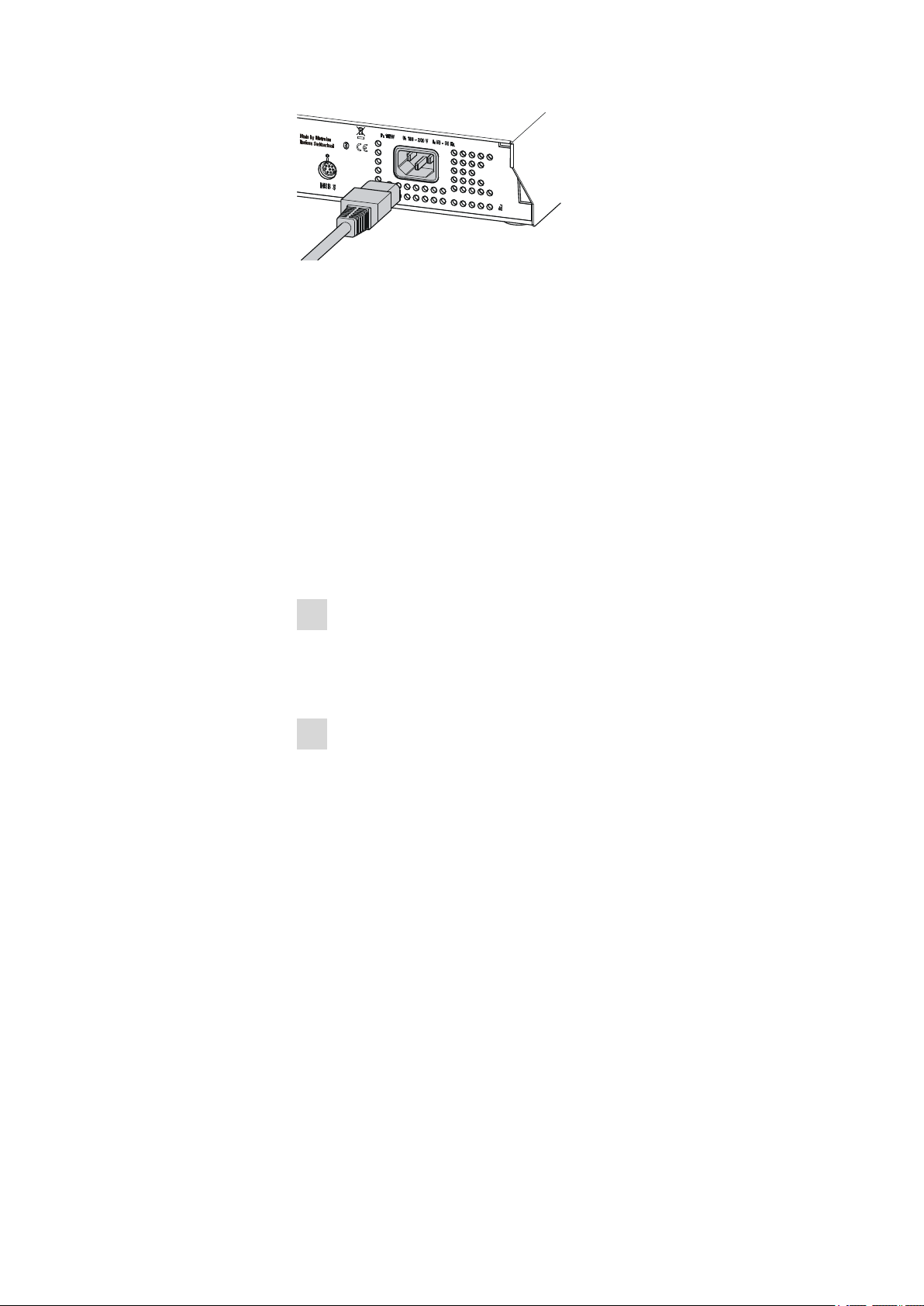
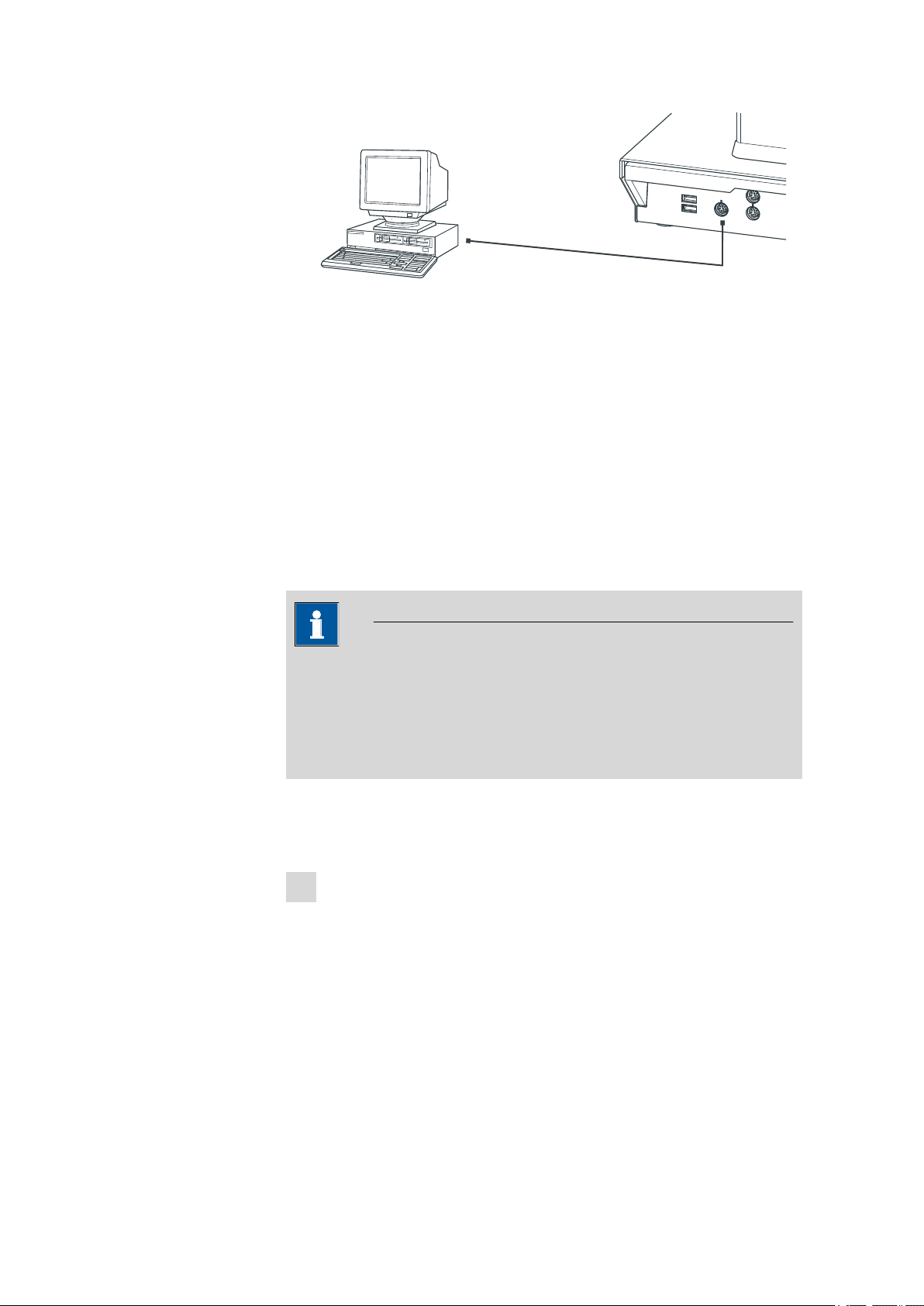
3.3 Conexión del ordenador
El 815 Robotic USB Sample Processor XL necesita una conexión USB para
un ordenador a fin de poder controlarlo mediante un programa informático. Con un cable de controlador 6.2151.000 el aparato se puede conectar directamente a una toma USB de un ordenador, a un concentrador
USB conectado o a otro aparato de control de Metrohm.
Conexión de los cables e instalación del controlador
Para que el programa detecte a 815 Robotic USB Sample Processor XL es
necesario instalar un controlador. Para ello, debe seguirse un procedimiento preestablecido. Es preciso seguir los pasos siguientes:
1
Instalación del programa
■ Introduzca el CD de instalación del programa y siga las instruccio-
nes del programa de instalación.
■ Finalice el programa si lo ha iniciado tras la instalación.
2
Establecimiento de las conexiones de cables
■ Conecte todos los aparatos periféricos al aparato (véase Capítulo
3.13, página 37).
■ Conecte 815 Robotic USB Sample Processor XL a la red eléctrica si
no lo ha hecho aún.
■ Conecte el aparato a su ordenador mediante un conector USB
(modelo A) (véase el manual del ordenador). Utilice para ello el
cable 6.2151.000.
3 Instalación
815 Robotic USB Sample Processor XL
■■■■■■■■
15
Page 24
3.3 Conexión del ordenador
6.2151.000
USB 2
USB 1
Contr.
MSB 2
■■■■■■■■■■■■■■■■■■■■■■
Figura 7 Conexión del ordenador
En Windows 2000: se detecta el aparato y el controlador se instala
automáticamente.
En Windows XP: se detecta el aparato y se inicia automáticamente
el asistente para la instalación del controlador. Seleccione la opción
"Instalar software automáticamente" y haga clic en [Continuar].
Salga del asistente mediante [Terminar].
En Windows Vista: se detecta el aparato y se inicia automáticamente el asistente para la instalación del controlador. Seleccione la
opción "Buscar e instalar software de controlador". Responda afirmativamente a todas las preguntas que aparezcan a continuación. El
asistente de instalación finaliza automáticamente.
Nota
El enchufe en el lado del aparato del cable de controlador 6.2151.000
está protegido con un seguro contra tirones que evita que se pueda
desconectar por accidente. Cuando desee desconectar el enchufe,
deberá retirar primero la funda externa del enchufe marcada con flechas.
Registro del aparato en el programa y configuración
El aparato se debe registrar en la configuración del programa. Luego se
puede configurar según las necesidades. Para ello, haga lo siguiente:
1
Configuración del aparato
■ Inicie el programa.
El aparato es detectado automáticamente. Se muestra el cuadro
de diálogo para configurar el aparato.
■ Defina los ajustes de la configuración del aparato y sus conecto-
res.
Para más información sobre la configuración del aparato, consulte la
documentación del programa correspondiente.
■■■■■■■■
16
815 Robotic USB Sample Processor XL
Page 25
■■■■■■■■■■■■■■■■■■■■■■
1
1
2
3.4 Montar el Swing Head al Sample Processor
3.4.1 Montar el Swing Head
Desmontar el soporte del cabezal de titración
3 Instalación
Quite los tornillos del soporte a ambos lados.
1
Suelte el soporte de la placa de soporte de la cadena para guía auto-
2
mática y retírelo.
Utilice para ello la llave hexagonal suministrada. Los tornillos se van a volver a necesitar más tarde.
815 Robotic USB Sample Processor XL
■■■■■■■■
17
Page 26

3.4 Montar el Swing Head al Sample Processor
1
2
3
4
Conectar el Swing Head
La toma de conexión (Mini-DIN) para el accionamiento Swing Head se
encuentra en la parte posterior de la torre, junto al conector de agitador.
Figura 8 Conexión de Swing Head
Conectar el Swing Head del siguiente modo:
1
Cómo enchufar el cable
■ Pase el cable de conexión del Swing Head por la cadena para guía
■ Conecte el enchufe Mini-DIN en la toma "Swing Head".
■■■■■■■■■■■■■■■■■■■■■■
automática de la torre (véase Capítulo 3.4.2, página 20).
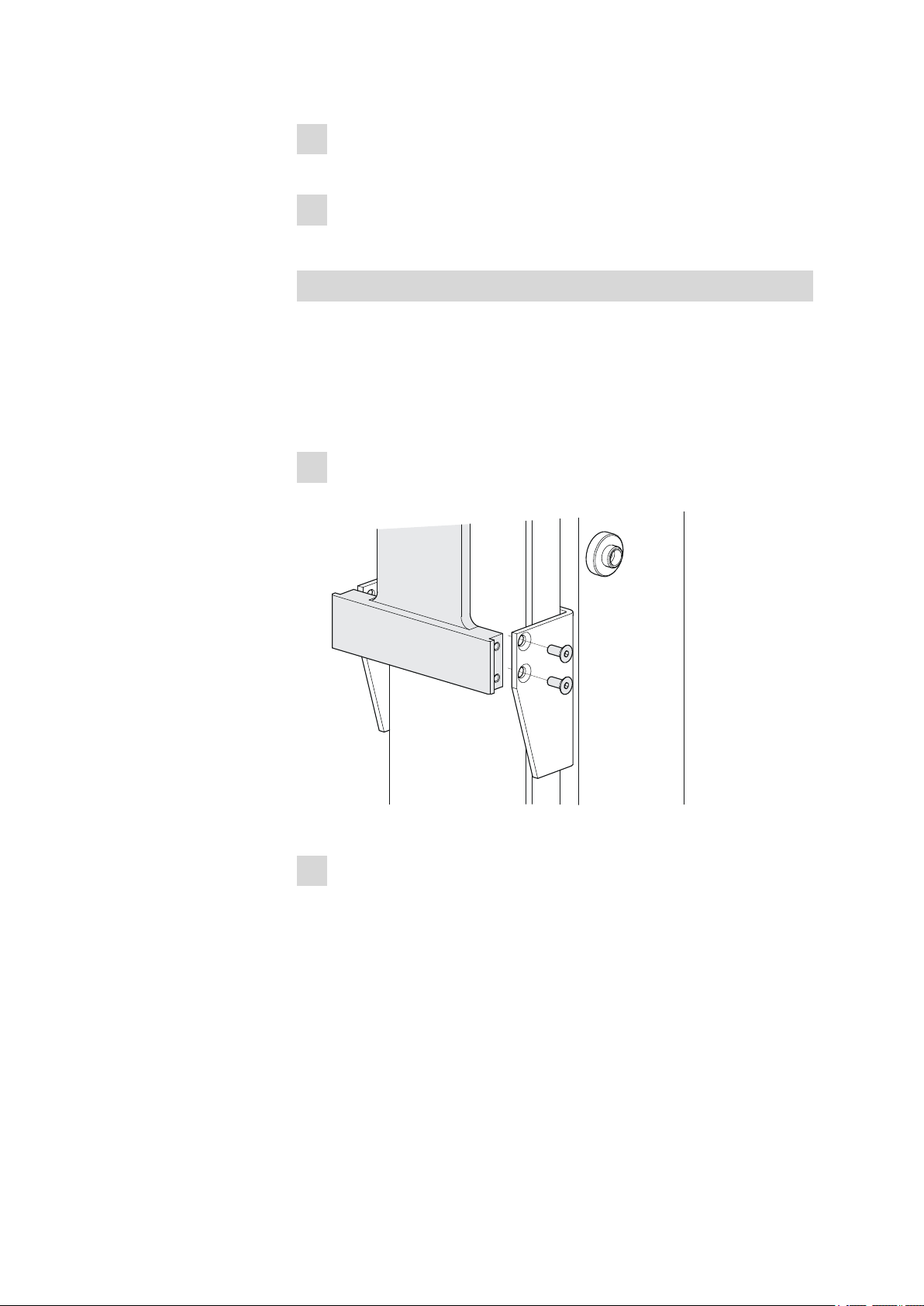
Montar el Swing Head
Atornille bien el Swing Head a la placa de soporte de la cadena para
1
guía automática con dos tornillos avellanados V.024.4012.
Fije el Swing Head entre las mordazas de guía.
2
■■■■■■■■
18
815 Robotic USB Sample Processor XL
Page 27
■■■■■■■■■■■■■■■■■■■■■■
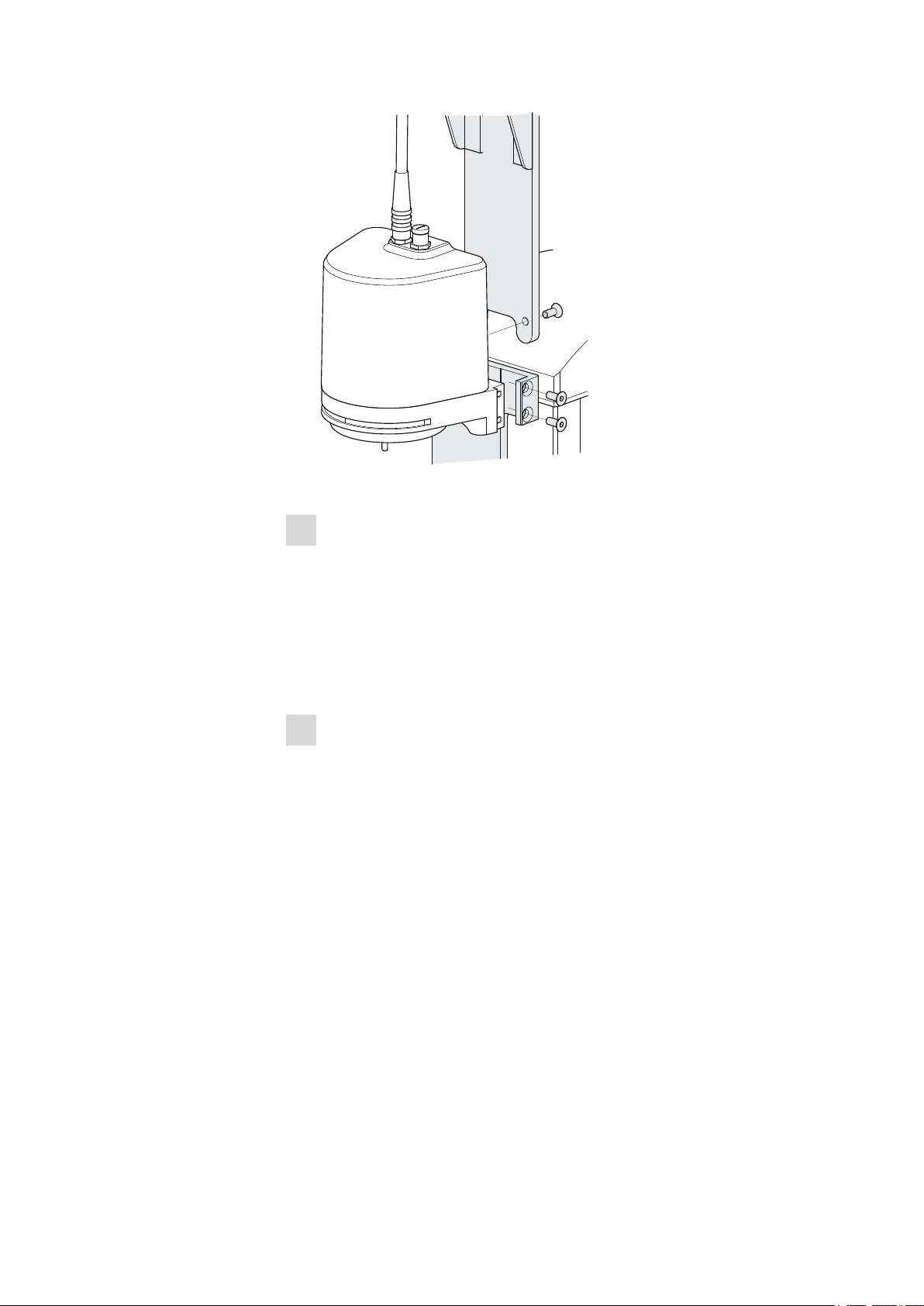
1
3 Instalación
Atornille bien el Swing Head a las mordazas de guía con los tornillos
3
que se han quitado antes.
Coloque el cable de conexión en la cadena para guía automática
4
(véase Capítulo 3.4.2, página 20).
Montar el Swing Head con extensión de torre
En determinadas aplicaciones puede ser necesario montar el 815 Robotic
USB Sample Processor XL en una posición más elevada. Con este fin, se
puede montar una extensión de torre 6.2058.010 en el elevador.
Desmonte primero el soporte del cabezal de titración (véase Capítulo
3.4.1, página 17). A continuación, proceda de la siguiente forma:
Fije la extensión de torre a la guía del elevador del Sample Processor
1
según la siguiente figura y atorníllela con los tornillos suministrados.
815 Robotic USB Sample Processor XL
Figura 9 Montar la extensión de torre
Atornille bien el Swing Head a la placa de soporte de la cadena para
2
guía automática con dos tornillos avellanados V.024.4012.
■■■■■■■■
19
Page 28
3.4 Montar el Swing Head al Sample Processor
2
3
Figura 10 Montar el Swing Head a la extensión de torre
Atornille bien el Swing Head en el extremo superior de la extensión
3
de torre.
■■■■■■■■■■■■■■■■■■■■■■
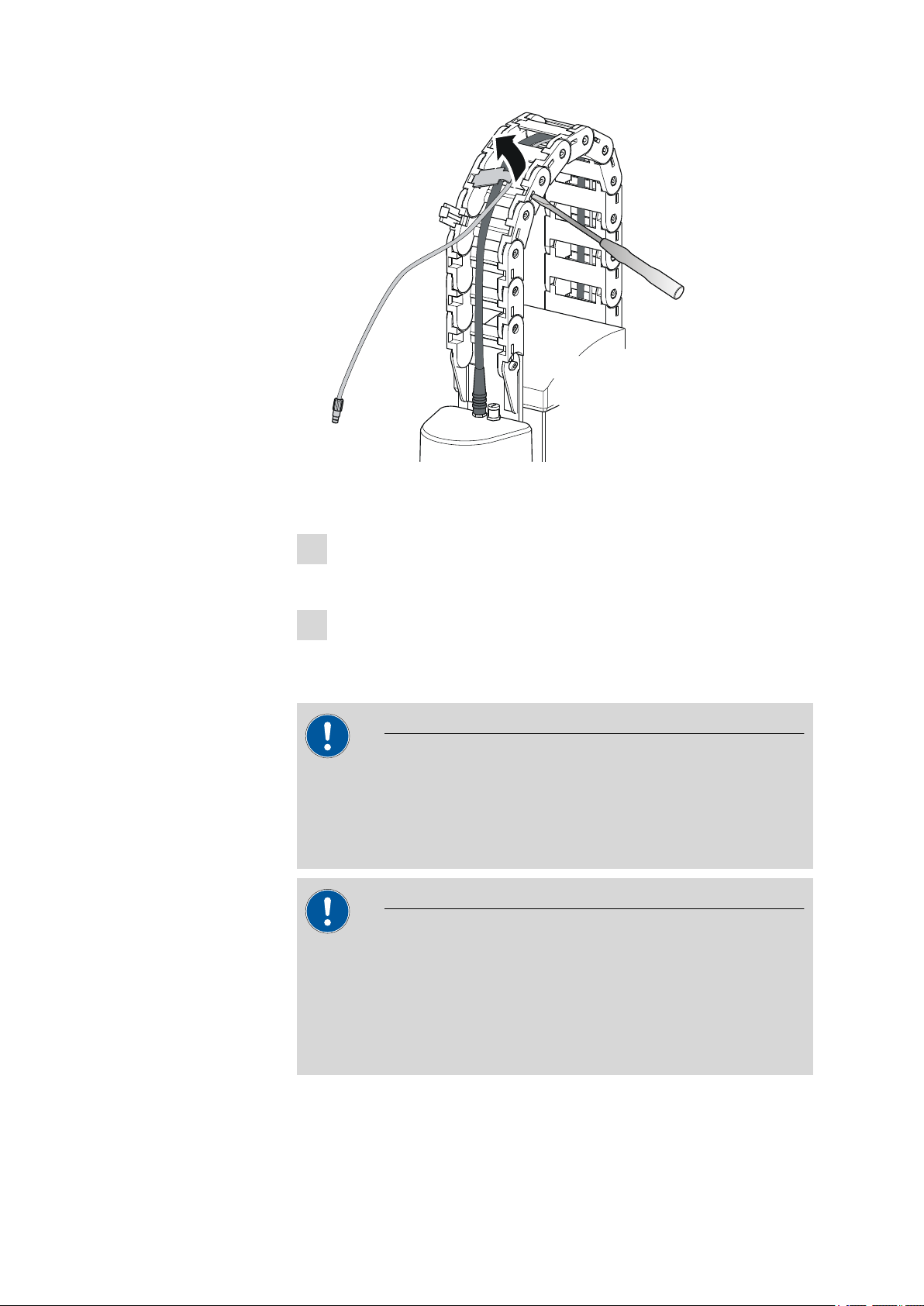
3.4.2 Cadena para guía automática para el cable y los tubos
Los tubos y cables se pueden colocar en la cadena para guía automática.
Cada eslabón de la cadena se puede abrir con un destornillador como se
describe a continuación.
1
Apertura de la cadena para guía automática
■ Introduzca un destornillador en la ranura lateral de un eslabón de
la cadena.
■ Suelte la malla de cadena haciendo palanca con fuerza.
■ Saque la malla de cadena con la mano.
■ Repita los pasos anteriores con cada eslabón de la cadena.
■■■■■■■■
20
815 Robotic USB Sample Processor XL
Page 29
■■■■■■■■■■■■■■■■■■■■■■
Figura 11 Cadena para guía automática: apertura de los eslabo-
nes de la cadena
2
Insertar en la cadena para guía automática
■ Coloque los tubos o cables en la cadena para guía automática.
3
Cierre de la cadena para guía automática
■ Vuelva a cerrar con la mano la malla de cada eslabón de la
cadena y ejerza presión para que encajen.
3 Instalación
Atención
Al montar los tubos y los cables asegúrese de que no se genere ninguna tracción en los accionamientos durante el movimiento del elevador o el giro de un brazo giratorio. Esto podría sobrecargar y, posiblemente, dañar el accionamiento.
Atención
Cuando instale tubos de lavado y de aspiración, retire las mallas de los
dos eslabones de cadena inferiores. Los movimientos giratorios del
brazo giratorio deben poder realizarse sin oponer resistencia.
No coloque tubos rígidos como, p. ej., tubos de aspiración de PTFE en
la cadena para guía automática.
815 Robotic USB Sample Processor XL
■■■■■■■■
21
Page 30
3.4 Montar el Swing Head al Sample Processor
2
1
6.2058.090
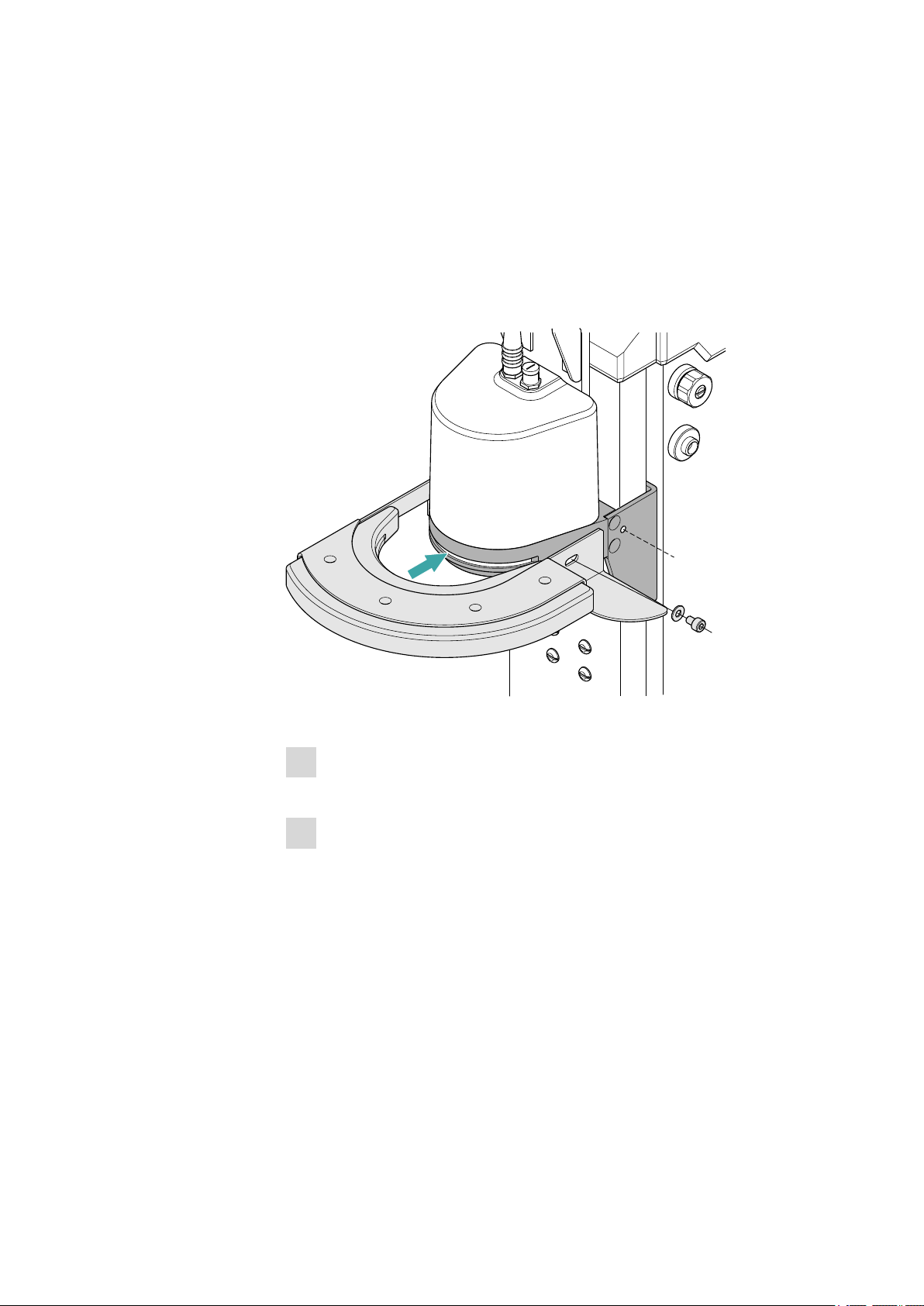
3.4.3 Montar el refuerzo del brazo giratorio
En aquellos casos en los que es necesario soportar y quitar un filtro o una
punta de pipeteado en el brazo giratorio, se debe montar un refuerzo de
brazo giratorio 6.2058.090. El refuerzo ofrece una resistencia estable
al brazo giratorio al soportar o quitar la herramienta utilizada e impide que
se doble.
El refuerzo se debe colocar antes de montar un brazo giratorio. Proceda
de la siguiente forma:
■■■■■■■■■■■■■■■■■■■■■■
Figura 12 Montar el refuerzo del brazo giratorio 6.2058.090
Desplace el refuerzo desde delante sobre la placa de soporte del
1
Swing Head.
Atornille bien el refuerzo a la guía del elevador con los tornillos sumi-
2
nistrados.
■■■■■■■■
22
815 Robotic USB Sample Processor XL
Page 31

■■■■■■■■■■■■■■■■■■■■■■
321
4 5
3.5 Configurar el brazo giratorio
Para permitir el máximo de aplicaciones diferentes hay diferentes tipos de
brazos giratorios construidos disponibles. Éstos se diferencian entre sí por
sus masas geométricas como, p. ej., el radio de giro o el ángulo de giro
máximo permitido. Los datos de configuración se deben introducir en el
Sample Processor o en el programa de control antes del montaje del
brazo giratorio. Los datos necesarios están grabados en la parte inferior
del brazo giratorio. En la figura inferior se muestran ejemplos de los brazos giratorios más habituales.
3 Instalación
Figura 13 Modelos estándar de brazos giratorios
Brazo giratorio de transferencia
1
(6.1462.030)
Para la transferencia de muestras, giro a la
izquierda.
Brazo giratorio de titulación
3
(6.1462.050)
Con cabezal de titración, giro a la izquierda/
derecha *).
Brazo giratorio (6.1462.070)
5
Con soporte para cabezal de titulación
6.1458.XXX, giro a la derecha.
*) se puede montar de dos maneras
Brazo giratorio de transferencia
2
(6.1462.040)
Para la transferencia de muestras, giro a la
derecha.
Brazo giratorio (6.1462.060)
4
Con soporte para cabezal de titulación
6.1458.XXX, giro a la izquierda.
815 Robotic USB Sample Processor XL
■■■■■■■■
23
Page 32

3.5 Configurar el brazo giratorio
2
3
4
5
1
■■■■■■■■■■■■■■■■■■■■■■
Nota
En el capítulo Brazos giratorios, página 53ss encontrará un listado
detallado de los brazos giratorios disponibles con los datos de configuración necesarios.
En la siguiente figura se muestran los datos de configuración más importantes que se deben definir en el programa de control para poder utilizar
correctamente el brazo giratorio (en este caso, de giro a la izquierda).
■■■■■■■■
24
Figura 14 Configuración de los brazos giratorios
815 Robotic USB Sample Processor XL
Page 33

■■■■■■■■■■■■■■■■■■■■■■
1
2
3 Instalación
Eje de giro
1
Recorre el centro del accionamiento Swing
Head.
Eje de origen
3
Va desde el eje de giro hasta el centro de la
gradilla de muestras y marca la posición inicial del brazo giratorio.
Ángulo máx. de giro
5
Representa la gama de giro del brazo giratorio. La gama va desde el eje de origen hasta
la posición de giro máxima del brazo giratorio.
Dirección de giro
La gama de brazos giratorios incluye modelos que giran a la izquierda
(dirección de giro +) o a la derecha (dirección de giro –). Un giro a la
izquierda consiste en un giro hacia la parte exterior izquierda (en dirección
contraria al centro de la gradilla) a partir de la posición inicial.
Radio de giro
2
Se determina a partir de la longitud del
brazo giratorio. El radio va desde el eje de
rotación hasta el centro de la punta del
brazo giratorio.
Decalaje de giro
4
Determina la posición 0° del brazo giratorio.
En un Sample Processor con dos torres se debe montar un brazo giratorio
que gire a la derecha en la torre 1 y uno que gire a la izquierda en la torre
2. Si no se colocan correctamente, los dos brazos giratorios podrían
tocarse y dañar los accionamientos.
3.6 Montar el brazo giratorio
Los brazos giratorios se pueden montar de manera que giren a la
izquierda o a la derecha, en función del modelo. Durante el montaje se
debe tener en cuenta la posición del tornillo de tope del brazo giratorio.
Al montar el brazo giratorio, el tornillo de tope debe apuntar hacia la torre
del Sample Processor. La siguiente figura muestra a la izquierda la posición
del tornillo de tope en un brazo que gira hacia la derecha (posición 1) y,
a la derecha, en un brazo que gira hacia la izquierda (posición 2).
Figura 15 Tornillo de tope en el brazo giratorio
815 Robotic USB Sample Processor XL
En el caso de brazos giratorios que se pueden montar de dos formas (p.
ej. 6.1462.050), el tornillo de tope se puede colocar de acuerdo con la
dirección de montaje necesaria (véase arriba).
■■■■■■■■
25
Page 34

3.6 Montar el brazo giratorio
1
2
3
■■■■■■■■■■■■■■■■■■■■■■
Nota
Antes de montar un brazo giratorio se deben configurar los datos de
configuración en el programa de control (véase Capítulo 3.5, página
23).
Montar el brazo giratorio
En este apartado se describe el montaje de un brazo giratorio en el Swing
Head tomando como ejemplo un brazo giratorio de titulación 6.1462.070
y un cabezal de titulación 6.1458.040. Inicialice el Sample Processor antes
de proceder al montaje.
Tras la inicialización del Sample Processor, la polea motriz del Swing Head
está posicionada como si el brazo giratorio estuviera situado en la posición
exterior.
■■■■■■■■
26
Figura 16 Montar el brazo giratorio
Monte el brazo giratorio del modo siguiente:
Coloque el cabezal de titulación 6.1458.040 en la abertura del
1
brazo giratorio y atorníllelo con los tornillos suministrados.
Sujete el brazo giratorio de manera que la abertura apunte hacia la
2
derecha. Al mismo tiempo, gírelo lo máximo posible hacia fuera,
es decir, hacia la torre (véase arriba). Ponga el brazo giratorio por
abajo a través de las levas de guía de la polea motriz del Swing Head.
815 Robotic USB Sample Processor XL
Page 35

■■■■■■■■■■■■■■■■■■■■■■
6.1462.150
1
2
3
Nota
Procure no girar excesivamente la polea motriz y, con ello, ejercer
presión sobre el accionamiento.
Atornille bien el brazo giratorio al Swing Head con los tornillos y las
3
arandelas suministrados.
3.7 Brazos giratorios con sensor de vasos
Por motivos de seguridad, se puede detectar la presencia de un vaso en la
gradilla de muestras de un Sample Processor. Por ello, algunos modelos
de brazo giratorio están equipados con un sensor de vasos.
3 Instalación
Figura 17 Conectar el sensor de vasos (ejemplo 6.1462.150)
Enchufe del cable de conexión
1
Sensor de vasos
3
Sensor de contacto según el principio Piezo
Toma de conexión al 786 Swing Head
2
Un brazo giratorio con sensor de vasos se monta tal y como se ha descrito
en la página 25. El cable del sensor se debe conectar con el aparato apagado.
815 Robotic USB Sample Processor XL
■■■■■■■■
27
Page 36

3.8 Instalar el equipo de lavado y aspiración
El sensor de vasos se detecta automáticamente cuando se pone en marcha el aparato.
Funcionamiento del sensor de vasos
Si se activa el sensor de vasos del brazo giratorio, el elevador del Sample
Processor se desplaza automáticamente a su posición de trabajo tras recibir la instrucción de movimiento "MOVE". La presencia del recipiente de
muestras se comprueba colocando el brazo giratorio sobre él.
En este caso, no es necesaria una instrucción separada de elevador "LIFT".
La posición de trabajo del elevador se debe configurar de manera que
el brazo giratorio descanse sobre el recipiente de muestras. El brazo
giratorio se debe curvar muy ligeramente para que el sensor Piezo emita
una señal.
■■■■■■■■■■■■■■■■■■■■■■
Nota
3.8 Instalar el equipo de lavado y aspiración
Para lavar electrodos y puntas de dosificación y para aspirar soluciones de
muestra después de una titración se precisan distintos tubos. Monte primero los tubos del distribuidor.
■■■■■■■■
28
815 Robotic USB Sample Processor XL
Page 37

■■■■■■■■■■■■■■■■■■■■■■
6.1805.510
6.1805.060
6.1808.170
6.1812.000
1
2
3
4
Montar los tubos de lavado y aspiración
Instale los tubos de la siguiente forma:
Figura 18 Montar los tubos de lavado y aspiración
1
Montar los tubos de lavado
■ Fije los tres tubos FEP 6.1805.060 (60 cm) a mano en los orifi-
cios M6 del distribuidor. Meta los tubos en la cadena para guía
automática (véase Capítulo 3.4.2, página 20).
Estas son las entradas para las toberas de atomización.
2
Montar el tubo de aspiración
■ Fije el tubo de aspiración FEP 6.1805.510 (60 cm) a mano en
los orificios M8 del distribuidor.
3
Montar la entrada de líquido detergente
■ Saque la tuerca de unión del conector izquierdo del distribuidor y
desplácela hasta el extremo de un tubo de politetrafluoretileno 6.1812.000. Es posible que deba sacar también el extremo
del tubo para poderlo montar mejor; en tal caso, vea la observación a continuación. Disponga el extremo del tubo boca abajo
encima del adaptador para enchufe del distribuidor y fíjelo con la
tuerca de unión.
El tubo lleva hasta la bomba de lavado (bomba 1) y puede cortarse según la longitud deseada.
3 Instalación
815 Robotic USB Sample Processor XL
■■■■■■■■
29
Page 38

3.8 Instalar el equipo de lavado y aspiración
6.1808.170
1
2
4
Montar el tubo de residuos
■ Saque la tuerca de unión del conector derecho del distribuidor y
■■■■■■■■■■■■■■■■■■■■■■
Nota
Es posible que tenga que agrandar la apertura del tubo con un
objeto puntiagudo (p. ej. un destornillador cruciforme).
Utilice papel de lija para fijar mejor el tubo.
Agranden la apertura del extremo del tubo después de haber
introducido en él la tuerca de unión.
desplácela hasta el extremo del tubo de politetrafluoretileno
6.1812.000. Disponga el extremo del tubo boca abajo encima
del adaptador para enchufe del distribuidor y fíjelo con la tuerca
de unión.
El tubo lleva hasta la bomba de aspiración (bomba 2) y puede
cortarse según la longitud deseada.
Montar el distribuidor
Figura 19 Montar el distribuidor
Proceda de la siguiente forma:
1
Quitar el eslabón de cadena
■ Quite la malla del tercer eslabón de la cadena para guía automá-
tica. Anule la malla de ambos lados del eslabón de cadena con un
destornillador, tal como se muestra en la siguiente figura.
2
Insertar el distribuidor
■ Presione fuertemente el distribuidor 6.1808.170 (con los tubos
conectados) para colocarlo en el eslabón abierto.
30
■■■■■■■■
815 Robotic USB Sample Processor XL
Page 39

■■■■■■■■■■■■■■■■■■■■■■
3
Fijar los tubos de lavado
■ Coloque los tubos de lavado en la cadena para guía automática.
3.9 Cadena para guía automática para el cable y los tubos
Los tubos y cables se pueden colocar en la cadena para guía automática.
Cada eslabón de la cadena se puede abrir con un destornillador como se
describe a continuación.
1
Apertura de la cadena para guía automática
■ Introduzca un destornillador en la ranura lateral de un eslabón de
la cadena.
■ Suelte la malla de cadena haciendo palanca con fuerza.
■ Saque la malla de cadena con la mano.
■ Repita los pasos anteriores con cada eslabón de la cadena.
3 Instalación
815 Robotic USB Sample Processor XL
Figura 20 Cadena para guía automática: apertura de los eslabo-
nes de la cadena
2
Insertar en la cadena para guía automática
■ Coloque los tubos o cables en la cadena para guía automática.
3
Cierre de la cadena para guía automática
■ Vuelva a cerrar con la mano la malla de cada eslabón de la
cadena y ejerza presión para que encajen.
■■■■■■■■
31
Page 40

3.10 Montar el cabezal de titración
■■■■■■■■■■■■■■■■■■■■■■
Atención
Al montar los tubos y los cables asegúrese de que no se genere ninguna tracción en los accionamientos durante el movimiento del elevador o el giro de un brazo giratorio. Esto podría sobrecargar y, posiblemente, dañar el accionamiento.
Atención
Cuando instale tubos de lavado y de aspiración, retire las mallas de los
dos eslabones de cadena inferiores. Los movimientos giratorios del
brazo giratorio deben poder realizarse sin oponer resistencia.
No coloque tubos rígidos como, p. ej., tubos de aspiración de PTFE en
la cadena para guía automática.
3.10 Montar el cabezal de titración
Montar los tubos de aspiración y lavado
Ejemplo de un brazo giratorio 6.1462.070.
■■■■■■■■
32
815 Robotic USB Sample Processor XL
Page 41

■■■■■■■■■■■■■■■■■■■■■■
1
2
3
6.1805.060
6.1805.510
6.1543.170
3 Instalación
Figura 21 Instalación de los tubos de lavado y la punta de aspiración
Proceda de la siguiente forma:
1
Conectar las toberas de lavado
■ Conecte las tres toberas de lavado, que a su vez ya están conecta-
das con el distribuidor de la torre 2, con las toberas de lavado premontadas en el cabezal de titración.
2
Insertar la punta de aspiración
■ Introduzca la punta de aspiración 6.1543.170 en la apertura
delantera izquierda del cabezal de titración.
3
Conectar el tubo de aspiración
■ Conecte el tubo de aspiración 6.1805.510, que a su vez ya está
conectado con el distribuidor, con la punta de aspiración.
815 Robotic USB Sample Processor XL
■■■■■■■■
33
Page 42

3.10 Montar el cabezal de titración
1
2
3
4
1.802.0010
6.1909.050
6.2104.030
6.1236.020
6.0229.100
6.1805.120
■■■■■■■■■■■■■■■■■■■■■■
Insertar agitador y electrodo, conectar los tubos de dosificación
Figura 22 Instalación del agitador y electrodo
Complete el montaje del cabezal de titración de la forma siguiente:
1
Insertar el agitador de hélice
■ Inserte el agitador de hélice (802 Stirrer) en la apertura posterior
del cabezal de titración (en la flecha).
■ ponga el cable en la cadena para guía automática.
2
Montar el hélice de agitador
■ Fije el hélice de agitador 6.1909.050 por abajo al agitador de
hélice.
3
Insertar el electrodo
■ Inserte el electrodo (p. ej. un Solvotrode 6.0229.100) con un
manguito esmerilado 6.1236.020 en el cabezal de titración.
■■■■■■■■
34
815 Robotic USB Sample Processor XL
Page 43

■■■■■■■■■■■■■■■■■■■■■■
4
Conectar los tubos de dosificación
■ Conecte dos tubos de dosificación (p. ej. 6.1805.120) en las pun-
tas de dosificación premontadas del cabezal de titración.
3.11 Conectar el agitador de torre
En la parte posterior de la torre hay una toma DIN para conectar un agitador de hélice (802 Stirrer) o un agitador magnético (741 Stirrer).
Figura 23 Agitador de hélice 802 Stirrer
3 Instalación
Figura 24 Agitador magnético 741 Stirrer
Cuando enchufe el cable de conexión del agitador, preste atención a la
correcta disposición de las clavijas de contacto. La nervadura en el lado
exterior del enchufe debe coincidir con la raya marcada (izquierda) en la
toma.
Figura 25 Conexión del agitador de torre
Nota
Si se conecta un agitador MSB a la toma MSB1 o MSB2, la conexión
del agitadora la torre 1 o a la torre 2 no se puede utilizar, ya que ambas
tomas también se activan internamente a través de MSB1 o de MSB2.
815 Robotic USB Sample Processor XL
■■■■■■■■
35
Page 44

3.12 Conectar una bomba externa
3.12 Conectar una bomba externa
En el caso de que no haya que utilizar bombas incorporadas o introducir
un modelo Sample Proceso sin bombas, pueden conectarse hasta dos
bombas externas por torre.
843 Pump Station (en la versión con bomba de diafragma o con bomba
peristáltica) tiene dos accionamientos de bomba i se conecta con el cable
de conexión 6.2141.300 (cable doble con dos clavijas) a dos tomas del
Sample Processor. 772 Pump Unit (bomba peristáltica) y 823 Mem-
brane Pump Unit (bomba de diafragma) tienen un cable de conexión
fijo con una sola clavija.
Conectar la bomba
■■■■■■■■■■■■■■■■■■■■■■
Figura 26 Conectar la bomba
Para conectar una bomba externa, haga lo siguiente:
1
Conexión del cable de unión
■ Conecte el enchufe roscado del cable de conexión a una de las
tomas de conexión (Bomba ext. 1 o bien Bomba ext. 2) de la
parte posterior de una torre de un Sample Processor.
Tenga en cuenta la orientación de las 3 clavijas de contacto.
■ Apriete con la mano el tornillo moleteado en el extremo delantero
del enchufe girándolo en el sentido de las agujas del reloj. De este
modo el enchufe queda bloqueado.
En el caso de una estación 843 Pump Station, conecte el otro
2
extremo del cable (enchufe D-Sub de 9 polos) a la toma Remoto 1
de la bomba.
■■■■■■■■
36
815 Robotic USB Sample Processor XL
Page 45

■■■■■■■■■■■■■■■■■■■■■■
3.13 Conexión de aparatos MSB
Para conectar aparatos MSB, p. ej. agitadores o dosificadores, los aparatos
de Metrohm cuentan con un máximo de cuatro conectores para los denominados Metrohm Serial Bus (MSB). A un conector MSB (toma Mini-DIN
de 8 polos) se pueden conectar secuencialmente (en serie, «daisy chain»)
aparatos periféricos de distintas clases que se pueden controlar simultáneamente por medio del aparato de control correspondiente. Los agitadores y la Remote Box cuentan para este fin con una toma USB propia además del cable de conexión.
En la imagen siguiente se ofrece una visión conjunta de los aparatos que
se pueden conectar a una toma MSB, así como diversas versiones de
cableado.
Los aparatos periféricos compatibles dependen del aparato de control.
Nota
3 Instalación
Si se conectan varios aparatos MSB, se debe tener en cuenta lo
siguiente:
■ Sólo se puede utilizar un aparato del mismo tipo en un conector
MSB cada vez.
■ Los dosificadores modelo 700 Dosino y 685 Dosimat no se pueden
conectar en un conector común con otros aparatos MSB. Estos dosificadores deben conectarse por separado.
Atención
Salga del programa de control antes de enchufar los aparatos MSB. El
aparato de control detecta automáticamente el conector MSB al que se
ha conectado el aparato cuando lo enchufe. La unidad de mando o el
programa de control registran los aparatos MSB conectados en la configuración del sistema (directorio de aparatos).
Las conexiones MSB se pueden alargar con el cable 6.2151.010. La conexión puede medir como máximo 15 m.
815 Robotic USB Sample Processor XL
■■■■■■■■
37
Page 46

3.13 Conexión de aparatos MSB
USB 1
Contr.
MSB 2
MSB 3
T.2400.102
3.13.1 Conexión del dosificador
Se pueden conectar tres dosificadores al aparato.
Los modelos de dosificador compatibles son:
■ 800 Dosino
■ 700 Dosino
■ 805 Dosimat
■ 685 Dosimat
Advertencia
Si se conecta un Dosino al 815 Robotic USB Sample Processor XL, el
cable de conexión debe estar provisto de un núcleo magnético
T.2400.102. El núcleo magnético reduce todo tipo de interferencias, de
modo que garantiza el cumplimiento de las exigentes normas de CEM
conforme a la normativa técnica vigente. Véase el capítulo "Características técnicas"
■■■■■■■■■■■■■■■■■■■■■■
Proceda de la siguiente forma:
1
Montar el núcleo magnético
Fije un núcleo magnético T.2400.102 al cable de conexión de
Dosino, cerca del enchufe.
2
Conectar los dosificadores
■ Salir del programa de control.
■ Conecte el cable de conexión a una toma MSB en la parte poste-
rior del aparato de control.
■ Inicie el programa de control.
■■■■■■■■
38
Figura 27 Conectar los dosificadores
815 Robotic USB Sample Processor XL
Page 47

■■■■■■■■■■■■■■■■■■■■■■
USB 1
Contr.
MSB 2
MSB 3
3.13.2 Conectar un agitador o un stand de titración
Puede utilizar el agitador magnético 801 Stirrer, 803 Ti Stand (para agitar
"desde abajo"), o 804 Ti Stand, con el agitador de hélice 802 Stirrer (para
agitar "desde arriba").
Para conectar un agitador o un stand de titración, haga lo siguiente:
1
Conectar un agitador o un stand de titración
■ Salir del programa de control.
■ Conecte el cable de conexión del agitador magnético o el stand
de titración a una toma MSB en la parte posterior del aparato de
control.
■ Si se desea, se puede conectar el agitador de hélice a la toma
para agitador (con el símbolo de agitador) del stand de titración.
■ Inicie el programa de control.
3 Instalación
Figura 28 Conectar un agitador MSB
Figura 29 Agitador de hélice y stand de titración
815 Robotic USB Sample Processor XL
■■■■■■■■
39
Page 48

3.13 Conexión de aparatos MSB
USB 1
Contr.
MSB 2
MSB 3
3.13.3 Conectar la Remote Box
Con la Remote Box 6.2148.010 se pueden conectar aparatos que se controlan mediante líneas Remote y/o que envían señales de control a través
de líneas Remote. Además de Metrohm, otros fabricantes de aparatos utilizan conexiones de este tipo que permiten conectar varios aparatos juntos. Estas interfaces se denominan a menudo "TTL Logic", "I/O Control" o
"Relay Control" y suelen trabajar con un nivel de señal de 5 voltios.
Estas señales de control pueden ser estados de la línea eléctrica o impulsos eléctricos breves (> 200 ms) que indican un estado de servicio de un
aparato o bien desencadenan o comunican un suceso. De este modo es
posible coordinar los procesos de distintos aparatos en un sistema de
automatización complejo. No obstante, no es posible un intercambio de
datos.
Proceda de la siguiente forma:
1
Conectar la Remote Box
■ Salir del programa de control.
■ Conecte el cable de conexión de la Remote Box a una toma MSB
en la parte posterior del aparato de control.
■ Inicie el programa de control.
■■■■■■■■■■■■■■■■■■■■■■
■■■■■■■■
40
Figura 30 Conectar la Remote Box
Por ejemplo, puede conectar una 849 Level Control (control del nivel de
llenado en un recipiente de residuos) o una 731 Relay Box (caja de conexiones para tomas de 230/110 voltios de corriente alterna y salidas de
baja tensión de corriente continua). La Remote Box cuenta además con
una toma MSB a la que se puede conectar otro aparato MSB, p. ej., un
dosificador o un agitador.
En el apéndice encontrará información más detallada sobre la asignación
de "pins" de la interface en la Remote Box (véase Capítulo 6.3, página
51)
815 Robotic USB Sample Processor XL
Page 49

■■■■■■■■■■■■■■■■■■■■■■
USB 2
USB 1
3.14 Conexión de aparatos USB
Hay disponibles dos conectores de puerto USB (modelo de conector A)
para conectar aparatos con interfaz USB. 815 Robotic USB Sample Processor XL funciona entonces como concentrador USB. Si se desea conectar
más de dos aparatos USB, se puede utilizar además un concentrador USB
adicional que se puede adquirir en cualquier comercio especializado.
Nota
Cuando se conecta un aparato USB, el aparato de control detecta automáticamente qué aparato se ha conectado. El programa de control
registra un aparato USB conectado directamente en la configuración
del sistema (administrador de aparatos).
3.14.1 Conexión de un lector de código de barras
Un lector de código de barras ayuda a introducir texto y cifras. Puede
conectar un lector de código de barras con interfaz USB.
3 Instalación
Para conectar un lector de código de barras, haga lo siguiente:
1
Conexión del cable
■ Conecte el enchufe USB (modelo A) del lector de código de barras
en una toma USB en la parte trasera del aparato.
Figura 31 Conectores de puerto USB
2
Configuración del lector de código de barras en el programa
de control
■ Configure el lector de código de barras en la configuración del
programa de control tal como se describe en la ayuda en línea del
programa.
815 Robotic USB Sample Processor XL
■■■■■■■■
41
Page 50

3.15 Montaje de la consola de soporte
Configuración del lector de código de barras
El lector de código de barras requiere una cierta configuración básica. En
el manual del lector de código de barras encontrará las instrucciones para
programarlo. Vaya al modo de programación del lector de código de
barras y realice los ajustes siguientes:
1
■■■■■■■■■■■■■■■■■■■■■■
■ Seleccione el diseño del teclado para el país que desee (EE.UU.,
Alemania, Francia, España, Suiza (alemán)). Este ajuste debe coincidir con el del programa de control.
■ Asegúrese de que se puedan enviar todos los caracteres con Ctrl
(ASCII 00 a 31).
■ Defina que se envíe el carácter ASCII 02 (STX o Ctrl B) como pri-
mer carácter a modo de "Preamble" o "Prefix Code".
■ Defina que se envíe el carácter ASCII 04 (EOT o Ctrl D) como
último carácter a modo de "Postamble", "Record Suffix" o "Postfix
Code".
■ Salga del modo de programación.
3.15 Montaje de la consola de soporte
Si una aplicación precisa que la determinación no se haga en la gradilla de
muestras sino en una célula de medida externa, puede montarse una consola de soporte. Dicha consola puede situarse a la derecha o a la izquierda
de 815 Robotic USB Sample Processor XL. Pueden colocarse los accesorios
necesarios en la barra de soporte de la consola de soporte.
■■■■■■■■
42
815 Robotic USB Sample Processor XL
Page 51

■■■■■■■■■■■■■■■■■■■■■■
6.2001.070
1
2
3
4
5
6
3 Instalación
Montaje de la consola de soporte
Figura 32 Montaje de la consola de soporte
Proceda de la siguiente forma:
Introduzca el tornillo avellanado que se proporciona desde abajo en
1
la apertura del extremo posterior de la bancada.
Disponga la arandela de sujeción (con la cara plana hacia arriba)
2
sobre el tornillo avellanado y atornille la barra de soporte con él. 815
Robotic USB Sample Processor XL incluye la llave hexagonal necesaria
para ello.
Cuelgue la bancada con las abrazaderas en el riel de sujeción del
3
plato giratorio. Deslice toda la consola de soporte tanto como puede
hacia la torre. Fije las abrazaderas al riel de sujeción con una llave
hexagonal.
Nota
Pueden ponerse p. ej. un agitador magnético y una célula de
medida sobre la barra de soporte antes de fijar la consola de
soporte a la torre.
815 Robotic USB Sample Processor XL
Guíe el puntal desde arriba por encima de la barra de soporte.
4
■■■■■■■■
43
Page 52

3.16 Montar el cubeto de retención
1
2
En el panel posterior de la torre, suelte los tornillos de fijación del
5
puntal (ver figura) y fíjelo con el tornillo hexagonal que se proporciona.
Fije el puntal en la barra de soporte con una llave hexagonal (ver
6
figura).
3.16 Montar el cubeto de retención
El vertido de productos químicos o muestras líquidas puede producir
daños graves al aparato o poner en riesgo el usuario. Para evitarlo, es
recomendable utilizar un cubeto de retención (6.2711.060).
Montar el cubeto de retención
■■■■■■■■■■■■■■■■■■■■■■
Figura 33 Instalar el cubeto de retención
Instale el cubeto de retención de la forma siguiente:
Fije el tubo que se incluye a la boquilla de desagüe del cubeto de
1
retención y guíe el extremo libre del tubo hacia un recipiente de
desechos.
Disponga el cubeto de retención en el riel de sujeción del plato gira-
2
torio de la forma que se observa en la figura.
44
■■■■■■■■
815 Robotic USB Sample Processor XL
Page 53

■■■■■■■■■■■■■■■■■■■■■■
1
2
3.17 Colocación de la gradilla de muestras
Figura 34 Colocación de la gradilla
Coloque la gradilla de la siguiente forma:
Coloque con cuidado la gradilla en el centro del plato giratorio. Las
1
clavijas guía del plato giratorio deben encajarse en las aberturas de la
base de la gradilla.
3 Instalación
Nota
Sujete la gradilla de manera que el logo de Metrohm impreso se
pueda leer horizontalmente.
Apriete el tornillo de fijación de la empuñadura girándolo en el sen-
2
tido de las agujas del reloj.
Ejecute la función [Rack Reset] desde el control manual del soft-
3
ware de control.
La gradilla se desplaza hasta la posición inicial. Durante esta operación, el aparato lee el código magnético de la gradilla. La flecha
blanca de la figura 34 indica la posición del soporte magnético. El
código magnético de seis cifras sirve para identificar el tipo de gradilla. Con el tipo de gradilla se definen las posiciones de las muestras y
las posibles posiciones especiales en la gradilla.
815 Robotic USB Sample Processor XL
■■■■■■■■
45
Page 54

3.18 Montar la cubierta de seguridad
1
2
3
3.18 Montar la cubierta de seguridad
Advertencia
Es imprescindible montar la cubierta de seguridad antes de utilizar el
815 Robotic USB Sample Processor XL por primera vez. El aparato no se
debe utilizar sin la cubierta de seguridad.
■■■■■■■■■■■■■■■■■■■■■■
Figura 35 Montar la cubierta de seguridad
Proceda de la siguiente forma.
Suelte los tornillos moleteados en los dos lados de la torre.
1
Posicione la cubierta de seguridad desde arriba. Preste atención a
2
la figura correspondiente.
Fije la cubierta de seguridad con los tornillos moleteados.
3
Nota
Puede ajustar en todo momento la posición vertical de la cubierta
de seguridad aflojando los tornillos. Asegúrese de que durante el
funcionamiento del aparato no se pueda manipular la zona de trabajo del elevador.
■■■■■■■■
46
815 Robotic USB Sample Processor XL
Page 55

■■■■■■■■■■■■■■■■■■■■■■
4 Operación y mantenimiento
4.1 Aspectos generales
815 Robotic USB Sample Processor XL requiere una conservación adecuada. Una suciedad excesiva en el aparato puede ocasionar fallos funcionales y reducir la vida útil de la sólida mecánica y electrónica del mismo.
Si se acumula mucha suciedad, esto también puede influir en los resultados de la medida. En muchas ocasiones, este riesgo puede evitarse limpiando de forma regular las piezas expuestas a la suciedad.
Si se derraman productos químicos o disolventes, deben limpiarse de
inmediato. Sobre todo, el cable de red debe protegerse de toda contaminación.
4.2 Conservación
4 Operación y mantenimiento
■ Compruebe regularmente la estanqueidad de las conexiones de tubo.
■ Lave las conexiones de tubo de vez en cuando. Tras un uso prolon-
gado, los tubos deben sustituirse.
4.3 Gestión de calidad y validación con Metrohm
Gestión de calidad
Metrohm le ofrece un amplio soporte en la aplicación de medidas de gestión de calidad para aparatos y software. Encontrará información al respecto en el folleto «Gestión de calidad con Metrohm», que puede
solicitar a su representante Metrohm local.
Mantenimiento
El control de los grupos funcionales electrónicos y mecánicos de los aparatos Metrohm puede y debe realizarse como parte de un mantenimiento
periódico por personal especializado de Metrohm. Consulte las condiciones concretas del contrato de mantenimiento correspondiente con su
representante local Metrohm.
Nota
Información sobre temas de gestión de calidad, validación y mantenimiento así como una sinopsis de los documentos actualmente disponibles en www.metrohm.com/com/, en Support.
815 Robotic USB Sample Processor XL
■■■■■■■■
47
Page 56

5.1 Sample Processor
5 Tratamiento de problemas
5.1 Sample Processor
Problema Causa Remedio
■■■■■■■■■■■■■■■■■■■■■■
El programa de control no reconoce el
aparato.
Sample Processor – No hay
ninguna conexión USB.
Sample Processor – El aparato no tiene alimentación
eléctrica.
1. Enchufe el cable de conexión USB correctamente en ambos extremos.
2. Vuelva a iniciar el programa de control o
desactive y active el Touch Control de
nuevo.
1. Enchufe el cable de alimentación al aparato.
2. Vuelva a iniciar el programa de control o
desactive y active el Touch Control de
nuevo.
5.2 Brazo giratorio
Problema Causa Remedio
El brazo giratorio se
desplaza completamente hacia afuera
y emite un zumbido.
Sample Processor – Swing
Head no está bien configurado.
Sample Processor – El
brazo giratorio no está
bien montado.
En "Configuración" (en Touch Control, en
"Administrador del aparato"), introduzca el
valor correcto para el decalaje de giro.
Retire el enchufe y desmonte el brazo giratorio. Compruebe la configuración del brazo
giratorio y, si es necesario, móntelo de forma
correcta (giro a la izquierda ⇔ giro a derecha).
Swing Head no
encuentra las posiciones en la gradilla
o lo hace de forma
inexacta.
■■■■■■■■
48
Sample Processor – Swing
Head no está bien configurado.
Sample Processor – La distancia entre ejes no está
bien configurada.
Sample Processor – Se está
utilizando la tabla de gradilla incorrecta.
En el programa de control, en "Configuración"
(en Touch Control, en "Administrador del aparato"), introduzca los valores correctos para el
radio de giro, el decalaje de giro, etc.
En el programa de control, en "Configuración"
(en Touch Control, en "Administrador del aparato"), introduzca el valor correcto para la dis-
tancia entre ejes.
Inicialice la gradilla con la función Inicializar
gradilla en el "Control manual".
815 Robotic USB Sample Processor XL
Page 57

■■■■■■■■■■■■■■■■■■■■■■
Problema Causa Remedio
5 Tratamiento de problemas
Swing Head – El accionamiento de Swing Head es
Póngase en contacto con el servicio técnico de
Metrohm.
defectuoso.
5.3 Bomba
Problema Causa Remedio
La bomba pierde
agua.
Sample Processor – La
conexión de tubo tiene
fugas.
Bidón – La presión sobre la
válvula de bomba es excesiva.
Compruebe las conexiones de tubo, especialmente entre el distribuidor y la bomba y atornille con fuerza.
■ Asegúrese de que los bidones no se
encuentren en un nivel superior al de la
bomba.
■ Compruebe el nivel del bidón.
815 Robotic USB Sample Processor XL
■■■■■■■■
49
Page 58

6.1 Sensor vaso
6 Apéndice
6.1 Sensor vaso
Las torres de los Sample Processors incorporan un sensor vaso que detecta
la presencia de un recipiente de muestras delante de la torre. Un sensor
infrarrojos detecta recipientes de distintos materiales, siempre que estén
colocados en posición correcta delante de la torre. En la configuración de
gradilla del aparato de control o del software de control debe seleccionarse Torre para la configuración "Sensor vaso". Este test de vaso se ejecuta cada vez que se alcanza una posición de gradilla en un desarrollo del
método.
■■■■■■■■■■■■■■■■■■■■■■
Figura 36 Sensor vaso en la torre
El sensor vaso en la torre sólo puede utilizarse con una gradilla de muestras de una fila.
6.2 Toberas de lavado
El uso de toberas de lavado resulta muy efectivo para limpiar recipientes
de muestras (con sensores y puntas de bureta) de forma eficaz. Las toberas de lavado están disponibles en dos variantes:
■ Tobera de atomización 6.2740.020
Para una pulverización precisa de la solución de lavado. La tobera
cuenta con un pequeño embudo en la apertura. La distribución (así
como la contrapresión) del líquido de lavado es significativamente
superior que en la tobera de lavado.
■■■■■■■■
50
815 Robotic USB Sample Processor XL
Page 59

■■■■■■■■■■■■■■■■■■■■■■
1
2
3
6 Apéndice
■ Tobera de lavado 6.2740.030
Para conseguir una extracción óptima de capas sobre electrodos y
accesorios de titración, el aprovisionamiento del líquido de lavado se
efectúa mediante chorros suaves.
Figura 37 Toberas de atomización - Funcionamiento
La altura de las toberas en el cabezal de titración puede graduarse para
conseguir un efecto de lavado óptimo.
6.3 Interface Remote
La Remote Box 6.2148.010 permite el control de aparatos que no pueden
conectarse directamente a la interface MSB del Sample Processor.
Figura 38 Conectores de la Remote Box
815 Robotic USB Sample Processor XL
■■■■■■■■
51
Page 60

6.3 Interface Remote
13
1
14
25
1
13
14
25
+5 V
t
p
t
p
■■■■■■■■■■■■■■■■■■■■■■
Cable
1
Para conectar a un conector MSB del Sample Processor.
Conector Remote
3
Conector MSB
2
Metrohm Serial Bus. Para conectar dosificadores o agitadores externos.
Para conectar aparatos con interface
Remote.
6.3.1 Asignación de patillas de las interfaces Remote
Figura 39 Asignación de patillas de la toma y del enchufe Remote
En la imagen superior se muestra la asignación de patillas de un interface
Remote de Metrohm. Esta asignación de patillas no sólo es válida para
Remote Box, sino también para todos los aparatos de Metrohm con un
conector Remote Sub-D de 25 polos.
Entradas
aprox. 50 kΩ Pull-up
t p >20 ms
activo = low, inactivo = high
Las líneas de entrada (input) se pueden explorar con la instrucción SCAN.
Salidas
Open Collector
t p >200 ms
activo = low, inactivo = high
I C = 20 mA, V
CEO
= 40 V
+5 V: carga máxima = 20 mA
Las líneas de salida (output) se pueden ajustar con la instrucción CON-
TROL.
52
■■■■■■■■
815 Robotic USB Sample Processor XL
Page 61

■■■■■■■■■■■■■■■■■■■■■■
6.1462.050
6.1462.060
6.1462.070
6.1462.260
6 Apéndice
Tabla 1 Entradas y salidas del interface Remote
Asignación N.º pin Asignación N.º pin
Input 0 21 Output 0 5
Input 1 9 Output 1 18
Input 2 22 Output 2 4
Input 3 10 Output 3 17
Input 4 23 Output 4 3
Input 5 11 Output 5 16
Input 6 24 Output 6 1
Input 7 12 Output 7 2
0 voltios/GND 14 Output 8 6
+5 voltios 15 Output 9 7
0 voltios/GND 25 Output 10 8
Output 11 13
Output 12 19
Output 13 20
6.4 Brazos giratorios
6.4.1 Brazos giratorios para la titulación
Tabla 2 Datos de configuración de los brazos giratorios de titulación
Tipo 6.1462.050 6.1462.060 6.1462.070 6.1462.260
Dirección de giro +/– + – +
Decalaje de giro 0° –8° –8° –8°
Ángulo máx. de giro 84° 73° 73° 105°
815 Robotic USB Sample Processor XL
■■■■■■■■
53
Page 62

6.4 Brazos giratorios
■■■■■■■■■■■■■■■■■■■■■■
Tipo 6.1462.050 6.1462.060 6.1462.070 6.1462.260
Radio de giro 110 mm 127 mm 127 mm 110 mm
6.1462.050
6.1462.060
6.1462.070
Brazo giratorio con cabezal de titración, giro a la izquierda o a la
derecha
Para la titulación en recipientes de muestras de 75 mL y mayores.
El brazo se puede equipar con dos microelectrodos, un agitador de hélice
y tres toberas pulverizadoras. El brazo ya incorpora dos puntas de bureta
con válvula antidifusora y una punta de aspiración con conectores para
tubos M6.
Material: PP
Brazo giratorio con soporte para cabezal de titración, giro a la
izquierda
El brazo se puede modificar para crear el brazo giratorio de titulación
deseado montando un cabezal de titración 6.1458.xxx.
Material: PP
Brazo giratorio con soporte para cabezal de titración, giro a la
derecha
El brazo se puede modificar para crear el brazo giratorio de titulación
deseado montando un cabezal de titración 6.1458.xxx.
6.1462.260
Material: PP
Brazo giratorio con soporte para cabezal de titración, giro a la
izquierda, externo
El brazo se puede modificar para crear el brazo giratorio de titulación
deseado montando un cabezal de titración 6.1458.xxx. Su sección permite
desplazarlo a posiciones externas junto a la gradilla, p. ej. una estación de
lavado externa.
Material: PVC
■■■■■■■■
54
815 Robotic USB Sample Processor XL
Page 63

■■■■■■■■■■■■■■■■■■■■■■
6.1462.150
6.1462.160
6.1462.170
Tabla 3 Datos de configuración de brazos giratorios de titulación con sensor de vasos
Tipo 6.1462.150 6.1462.160 6.1462.170
Dirección de giro +/– + –
Decalaje de giro 0° –8° –8°
Ángulo máx. de giro 84° 73° 73°
Radio de giro 110 mm 127 mm 127 mm
6 Apéndice
6.1462.150
6.1462.160
6.1462.170
Brazo giratorio con cabezal de titración y sensor de vasos, giro a
la izquierda o a la derecha
Para la titulación en recipientes de muestras de 75 mL y mayores.
El brazo se puede equipar con dos microelectrodos, un agitador de hélice
y tres toberas pulverizadoras. El brazo ya incorpora dos puntas de bureta
con válvula antidifusora y una punta de aspiración con conectores para
tubos M6.
Material: PP
Brazo giratorio con soporte para cabezal de titración y sensor de
vasos, giro a la izquierda
El brazo se puede modificar para crear el brazo giratorio de titulación
deseado montando un cabezal de titración 6.1458.xxx.
Material: PP
Brazo giratorio con soporte para cabezal de titración y sensor de
vasos, giro a la derecha
El brazo se puede modificar para crear el brazo giratorio de titulación
deseado montando un cabezal de titración 6.1458.xxx.
Material: PP
815 Robotic USB Sample Processor XL
■■■■■■■■
55
Page 64

6.4 Brazos giratorios
6.1462.030
6.1462.040
6.1462.090
6.1462.240
■■■■■■■■■■■■■■■■■■■■■■
6.4.2 Brazos giratorios para la preparación de muestras
Tabla 4 Datos de configuración de los brazos giratorios para la preparación de muestras
Tipo 6.1462.030 6.1462.040 6.1462.090 6.1462.240
Dirección de giro + – – –
Decalaje de giro 8° 8° 8° –8.6°
Ángulo máx. de giro 117° 117° 117° 122°
Radio de giro 112 mm 112 mm 112 mm 149.8 mm
6.1462.030
6.1462.040
6.1462.090
6.1462.240
Brazo giratorio con cabezal de transferencia, giro a la izquierda
Brazo giratorio para pipeteados completamente automáticos o diluciones
de muestras líquidas con sistemas Sample Processor.
Material: PP
Brazo giratorio con cabezal de transferencia, giro a la derecha
Brazo giratorio para pipeteados completamente automáticos o diluciones
de muestras líquidas con sistemas Sample Processor.
Material: PP
Brazo giratorio con adaptador de cierre Luer, giro a la derecha
Para conectar agujas huecas con conector de cierre Luer. Adecuado para
la transferencia de muestra de viales cerrados con cierre de septo.
Material: PP
Brazo giratorio con cabezal de transferencia, curvado, giro a la
derecha
El cabezal de transferencia, equipado con el adaptador 6.1808.220, se
puede utilizar para soportar varias herramientas con conector Luer en gradillas múltiples.
■■■■■■■■
56
Material: PP
815 Robotic USB Sample Processor XL
Page 65

■■■■■■■■■■■■■■■■■■■■■■
6.1462.250
6.1462.080
6.4.3 Brazos giratorios para aplicaciones especiales
Tabla 5 Datos de configuración de brazos giratorios especiales
Tipo 6.1462.250 6.1462.080
6 Apéndice
Dirección de giro + +
Decalaje de giro 0° 8°
Ángulo máx. de giro 115.5° 117°
Radio de giro 110 mm 112 mm
6.1462.250
Brazo giratorio como soporte de un Polytron, giro a la izquierda
El brazo giratorio permite utilizar el Polytron para la preparación de muestras en gradillas de muestras múltiples. Está equipado con una punta de
bureta retraída para la adición de disolventes y tres toberas pulverizadoras
para la limpieza.
Material: PP
6.1462.080
Brazo giratorio DIS-COVER, giro a la izquierda
Brazo giratorio para tapar y destapar recipientes de muestras (de 75 y 250
mL, tapa 6.2037.050 y 6.2037.060) en la gradilla de muestras de un
Robotic Sample Processor.
Material: PP
815 Robotic USB Sample Processor XL
■■■■■■■■
57
Page 66

7.1 Elevador y plato giratorio
7 Características técnicas
7.1 Elevador y plato giratorio
■■■■■■■■■■■■■■■■■■■■■■
Carrera del elevador
Carga máxima del
elevador
Velocidad de
carrera
Velocidad del
plato giratorio
235 mm
aprox. 30 N / 3 kg
Regulable entre 5 y 25 mm/s
Regulable entre 3 y 20 grados angulares/s
7.2 Bomba(s) de diafragma con válvula
Caudal
> 450 mL/min
Altura de presión 2 m
7.3 Interfaces y conectores
Conector controlador
Conectores MSB
MSB1 a MSB3
USB Upstream Port (toma Mini-DIN de 9 polos) para conectar un ordenador para el control del aparato.
Tres tomas Mini-DIN de 9 polos para conectar dosificadores (Dosino/
Dosimat), agitadores, etc.
Conectores USB
1/2
Conector de agitador
Velocidad de
agitación
Conectores de
bomba
Conector para
Swing Head
■■■■■■■■
58
Dos USB Downstream Ports (tomas modelo A), cada uno de 500 mA,
para conectar aparatos Metrohm o aparatos periféricos USB de otros
productores.
Toma DIN
Agitador de hélice 722/802: de 180 a 3000 rpm
Agitador magnético 741: de 180 a 2600 rpm
Regulable en intervalos de 15 en ambas direcciones de rotación
Dos tomas con rosca M8 para 772 Pump Unit, 823 Membrane Pump
Unit o 843 Pump Station
U= 16 ± 1 V, I= ≤ 0.8 A
Toma Mini-DIN de 9 polos
815 Robotic USB Sample Processor XL
Page 67

■■■■■■■■■■■■■■■■■■■■■■
7.4 Conexión a la red
7 Características técnicas
Voltaje
Frecuencia
Consumo de
100 a 240 V
50 a 60 Hz
115 W
potencia
Seguridad
2.0 ATH
7.5 Especificaciones de seguridad
Construcción y
comprobación
Indicaciones de
seguridad
De acuerdo con EN/IEC/UL 61010-1 , CSA-C22.2 No. 61010-1, EN/IEC
61010-2-081, clase de protecciónⅠ
Esta documentación contiene indicaciones de seguridad que el usuario
debe respetar a fin de garantizar la seguridad durante el funcionamiento del aparato.
7.6 Compatibilidad electromagnética (CEM)
Emisión de parasitaje
Normas cumplidas
■ EN/IEC 61326-1
■ EN/IEC 61000-6-3
■ EN 55022/CISPR 22
■ EN/IEC 61000-3-2
Resistencia al
parasitaje
Normas cumplidas
■ EN/IEC 61326
■ EN/IEC 61000-6-2
■ EN/IEC 61000-4-2
■ EN/IEC 61000-4-3
■ EN/IEC 61000-4-4
■ EN/IEC 61000-4-5
■ EN/IEC 61000-4-6
■ EN/IEC 61000-4-8
■ EN/IEC 61000-4-11
■ EN/IEC 61000-4-14
■ NAMUR
815 Robotic USB Sample Processor XL
■■■■■■■■
59
Page 68

7.7 Temperatura ambiente
7.7 Temperatura ambiente
■■■■■■■■■■■■■■■■■■■■■■
Gama nominal de
funcionamiento
Almacenamiento
Transporte
5 a 45 °C
Humedad relativa < 80 %
–20 a 60 °C
–40 a 60 °C
7.8 Condiciones de referencia
Temperatura
ambiente
Humedad atmosférica relativa
25 °C (± 3 °C)
≤ 60 %
7.9 Dimensiones
Anchura
Altura
Profundidad
Peso (sin accesorios)
0.28 m
0.73 m
0.53 m
1.815.0010: 14.52 kg
1.815.0020: 15.42 kg
1.815.0030: 13.82 kg
1.815.0110: 18.87 kg
1.815.0120: 19.93 kg
1.815.0130: 16.82 kg
Material
■■■■■■■■
60
Carcasa
Carcasa metálica, superficie tratada
815 Robotic USB Sample Processor XL
Page 69

■■■■■■■■■■■■■■■■■■■■■■
8 Declaración de conformidad y garantía
8 Declaración de conformidad y garantía
8.1 Declaration of Conformity
This is to certify the conformity to the standard specifications for electrical
appliances and accessories, as well as to the standard specifications for
security and to system validation issued by the manufacturing company.
Name of commodity
Electromagnetic
compatibility
815 Robotic USB Sample Processor XL
Sample changer with advanced liquid handling abilities for the automation of batch processing of larger sample series in analytical laboratories.
This instrument has been built and has undergone final type testing
according to the standards:
Emission: EN/IEC 61326-1: 2002, EN/IEC 61000-6-3: 2001,
EN 55022 / CISPR 22: 2006,
EN/IEC 61000-3-2: 2000
Immunity: EN/IEC 61326-1: 2002, EN/IEC 61000-6-2: 2001,
EN/IEC 61000-4-2: 2001,
EN/IEC 61000-4-3: 2002,
EN/IEC 61000-4-4: 2004,
EN/IEC 61000-4-5: 2001,
EN/IEC 61000-4-6: 2001,
EN/IEC 61000-4-8: 2001,
EN/IEC 61000-4-11: 2004,
EN/IEC 61000-4-14: 2004, NAMUR: 2004
Safety specifications
815 Robotic USB Sample Processor XL
EN/IEC 61010-1: 2001, UL 61010-1: 2004, CSA-C22.2 No. 61010-1:
2004, EN/IEC 61010-2-081: 2003, protection class I
This instrument meets the requirements of the CE mark as contained in
the EU directives 2006/95/EC (LVD), 2004/108/EC (EMC). It fulfils the following specifications:
EN 61326-1 Electrical equipment for measurement, control
EN 61010-1 Safety requirements for electrical equipment for
and laboratory use – EMC requirements
measurement, control and laboratory use
■■■■■■■■
61
Page 70

8.2 Garantía
■■■■■■■■■■■■■■■■■■■■■■
EN 61010-2-081 Particular requirements for automatic and semi-
automatic laboratory equipment for analysis and
other purposes
Manufacturer
8.2 Garantía
Metrohm Ltd., CH-9101 Herisau/Switzerland
Metrohm Ltd. is holder of the SQS certificate ISO 9001:2000 Quality management system for development, production and sales of instruments
and accessories for ion analysis.
Herisau, 20 February, 2009
D. Strohm
Vice President, Head of R&D
Head of Quality Management
A. Dellenbach
Metrohm garantiza que sus entregas y servicios no poseen defectos en el
material, construcción o fabricación. El período de garantía es de 36
meses contados a partir de la fecha de entrega; en el caso de funcionamiento diurno y nocturno del equipo, el período de garantía será de 18
meses a condición de que el servicio sea realizado por una organización
de servicio autorizada por Metrohm.
Queda excluida de la garantía la rotura de electrodos u otros elementos
de vidrio. Para la garantía sobre la precisión son determinantes los datos
técnicos indicados en las instrucciones para el uso. Para componentes de
fabricación ajena que formen una parte esencial de nuestros equipos regirán las condiciones de garantía de sus fabricantes. El derecho a reclamación durante el periodo de garantía será posible siempre que el comprador se encuentre al corriente de sus pagos.
Durante el período de garantía, Metrohm se responsabiliza, a su libre elección, de reparar gratuitamente el equipo en sus instalaciones, o de reemplazar el equipo que se demuestre que está defectuoso por otro nuevo.
Los gastos de transporte serán por cuenta del comprador.
La garantía no incluye deficiencias que surjan por circunstancias que no
sean responsabilidad de Metrohm, tales como un almacenamiento, uso
inapropiado, etc.
■■■■■■■■
62
815 Robotic USB Sample Processor XL
Page 71

■■■■■■■■■■■■■■■■■■■■■■
8.3 Quality Management Principles
Metrohm Ltd. holds the ISO 9001:2000 Certificate, registration number
10872-02, issued by SQS (Swiss Association for Quality and Management
Systems). Internal and external audits are carried out periodically to assure
that the standards defined by Metrohm’s QM Manual are maintained.
The steps involved in the design, manufacture and servicing of instruments
are fully documented and the resulting reports are archived for ten years.
The development of software for PCs and instruments is also duly documented and the documents and source codes are archived. Both remain
the possession of Metrohm. A non-disclosure agreement may be asked to
be provided by those requiring access to them.
The implementation of the ISO 9001:2000 quality management system is
described in Metrohm’s QM Manual, which comprises detailed instructions on the following fields of activity:
Instrument development
The organization of the instrument design, its planning and the intermediate controls are fully documented and traceable. Laboratory testing
accompanies all phases of instrument development.
8 Declaración de conformidad y garantía
Software development
Software development occurs in terms of the software life cycle. Tests are
performed to detect programming errors and to assess the program’s
functionality in a laboratory environment.
Components
All components used in the Metrohm instruments have to satisfy the quality standards that are defined and implemented for our products. Suppliers of components are audited by Metrohm as the need arises.
Manufacture
The measures put into practice in the production of our instruments guarantee a constant quality standard. Production planning and manufacturing
procedures, maintenance of production means and testing of components, intermediate and finished products are prescribed.
Customer support and service
Customer support involves all phases of instrument acquisition and use by
the customer, i.e. consulting to define the adequate equipment for the
analytical problem at hand, delivery of the equipment, user manuals, training, after-sales service and processing of customer complaints. The
Metrohm service organization is equipped to support customers in implementing standards such as GLP, GMP, ISO 900X, in performing Opera-
815 Robotic USB Sample Processor XL
■■■■■■■■
63
Page 72

8.3 Quality Management Principles
■■■■■■■■■■■■■■■■■■■■■■
tional Qualification and Performance Verification of the system components or in carrying out the System Validation for the quantitative determination of a substance in a given matrix.
■■■■■■■■
64
815 Robotic USB Sample Processor XL
Page 73

■■■■■■■■■■■■■■■■■■■■■■
9 Accesorios
9 Accesorios
Nota
Reservado el derecho a efectuar modificaciones.
9.1 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0010
Uds. N° de ped. Descripción
1 1.815.0010 815 Robotic USB Sample Processor XL (1T/
1P)
2 6.1236.020 Manguito EN 14/12 mm
Manguito EN 14/12 con junta tórica.
Material: PP
5 6.1446.000 Tapón esmerilado / B-14/(15)
Material: PP
Altura (mm): 30.5
Tamaño del esmerilado: B-14/(15)
815 Robotic USB Sample Processor XL
■■■■■■■■
65
Page 74

9.1 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0010
Uds. N° de ped. Descripción
3 6.1446.010 Tapón
Para cambiador de muestras
Material: PVDF
Altura (mm): 19
Diámetro exterior (mm): 9.3
1 6.1621.000 Bidón / 10 L
Para sistemas automatizados como bidones de lavado y de residuos.
Material: PE
Anchura (mm): 265
Altura (mm): 400
Volumen (mL): 10000
■■■■■■■■■■■■■■■■■■■■■■
3 6.1805.060 Tubo de FEP / M6 / 60 cm
Con protección contra luz y doblado.
Material: FEP
Diámetro interior (mm): 2
Longitud (mm): 600
■■■■■■■■
66
815 Robotic USB Sample Processor XL
Page 75

■■■■■■■■■■■■■■■■■■■■■■
Uds. N° de ped. Descripción
1 6.1805.110 Tubo de FEP / M6 / 80 cm
Con protección contra luz y doblado.
Material: FEP
Diámetro interior (mm): 2
Longitud (mm): 800
1 6.1812.000 Tubo PTFE / 4 m / 4/6 mm
Material: PTFE
Diámetro exterior (mm): 6
Diámetro interior (mm): 4
9 Accesorios
1 6.1828.000 Niple de conexión PVDF
Para bidón 6.1621.000
Material: PVDF
1 6.2053.000 Sujeción de cable
Sujeción para fijar cables
1 6.2151.000 Cable USB A – Mini-DIN 8 polos
Cable para Controller
Longitud (m): 1.8
815 Robotic USB Sample Processor XL
■■■■■■■■
67
Page 76

9.1 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0010
Uds. N° de ped. Descripción
1 6.2621.030 Llave hexagonal 4 mm
Longitud (mm): 73
1 6.2621.070 Llave de hexágono interior 5 mm
5 mm.
Longitud (mm): 80
■■■■■■■■■■■■■■■■■■■■■■
1 6.2621.140 Llave hexagonal 2.5 mm
3 6.2709.070 Manguito de guía
For fixation of buret and dosing tips in titration heads and electrode
holders
Material: ETFE
Longitud (mm): 16.5
■■■■■■■■
68
815 Robotic USB Sample Processor XL
Page 77

■■■■■■■■■■■■■■■■■■■■■■
Uds. N° de ped. Descripción
3 6.2740.020 Tobera de atomización
Para la dispersión fina de la disolución de lavado
Material: ETFE
Diámetro exterior (mm): 10
Longitud (mm): 47
1 6.2751.100 Protección contra salpicaduras
Protección contra salpicaduras para Procesadores de muestras con
786 Swing Head
9 Accesorios
4 T.240.0102 Protección antiparasitaria de ferrito
1 6.2122.0x0 Cable eléctrico con acoplamiento para equi-
pos en frío IEC-60320-C13
Conector eléctrico según las indicaciones del cliente.
Suiza: Tipo SEV 12
6.2122.020
Alemania, …: Tipo CEE(7), VII
6.2122.040
EE.UU., …: Tipo NEMA/ASA
6.2122.070
1 8.815.8003ES Manual 815 Robotic USB Sample Processor
XL
815 Robotic USB Sample Processor XL
■■■■■■■■
69
Page 78

9.2 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0020
■■■■■■■■■■■■■■■■■■■■■■
9.2 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0020
Uds. N° de ped. Descripción
1 1.815.0020 815 Robotic USB Sample Processor XL (1T/
2P)
2 6.1236.020 Manguito EN 14/12 mm
Manguito EN 14/12 con junta tórica.
Material: PP
5 6.1446.000 Tapón esmerilado / B-14/(15)
Material: PP
Altura (mm): 30.5
Tamaño del esmerilado: B-14/(15)
3 6.1446.010 Tapón
Para cambiador de muestras
Material: PVDF
Altura (mm): 19
Diámetro exterior (mm): 9.3
■■■■■■■■
70
815 Robotic USB Sample Processor XL
Page 79

■■■■■■■■■■■■■■■■■■■■■■
Uds. N° de ped. Descripción
1 6.1446.160 Tapón termómetro / B-14/15 / oblicuo
Para inclinar piezas insertables en el cabezal de valoración
6.1458.010.
Material: PTFE
Altura (mm): 21
Diámetro exterior (mm): 13
Tamaño del esmerilado: B-14/15
1 6.1543.170 Punta de aspiración / Rosca M8
Aspiration tip to Sample Processors
Material: PTFE
Longitud (mm): 198
9 Accesorios
2 6.1621.000 Bidón / 10 L
Para sistemas automatizados como bidones de lavado y de residuos.
Material: PE
Anchura (mm): 265
Altura (mm): 400
Volumen (mL): 10000
815 Robotic USB Sample Processor XL
■■■■■■■■
71
Page 80

9.2 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0020
Uds. N° de ped. Descripción
3 6.1805.060 Tubo de FEP / M6 / 60 cm
Con protección contra luz y doblado.
Material: FEP
Diámetro interior (mm): 2
Longitud (mm): 600
1 6.1805.110 Tubo de FEP / M6 / 80 cm
Con protección contra luz y doblado.
Material: FEP
Diámetro interior (mm): 2
Longitud (mm): 800
■■■■■■■■■■■■■■■■■■■■■■
1 6.1805.510 Tubo PTFE / M8 / 60 cm
Con protección contra doblado
Material: PTFE
Diámetro interior (mm): 3
Longitud (mm): 600
■■■■■■■■
72
815 Robotic USB Sample Processor XL
Page 81

■■■■■■■■■■■■■■■■■■■■■■
Uds. N° de ped. Descripción
2 6.1812.000 Tubo PTFE / 4 m / 4/6 mm
Material: PTFE
Diámetro exterior (mm): 6
Diámetro interior (mm): 4
1 6.1820.070 Acoplador 4/6 mm / M8 interior
Extensión para tubos de aspiración en sistemas automáticos. Conecta
el tubo de aspiración M8 directamente con el tubo 6.1812.000 PTFE.
Material: PTFE
9 Accesorios
2 6.1828.000 Niple de conexión PVDF
Para bidón 6.1621.000
Material: PVDF
1 6.2042.020 Sujeción de punta de bureta (agitador mag-
nético)
Sujeción para la disposición estable de puntas de bureta, tubos de
dosificación o aspiración usando un agitador magnético en el recipiente de valoración de un cambiador de muestras
1 6.2053.000 Sujeción de cable
Sujeción para fijar cables
815 Robotic USB Sample Processor XL
■■■■■■■■
73
Page 82

9.2 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0020
Uds. N° de ped. Descripción
1 6.2151.000 Cable USB A – Mini-DIN 8 polos
Cable para Controller
Longitud (m): 1.8
1 6.2621.030 Llave hexagonal 4 mm
Longitud (mm): 73
■■■■■■■■■■■■■■■■■■■■■■
1 6.2621.070 Llave de hexágono interior 5 mm
5 mm.
Longitud (mm): 80
1 6.2621.140 Llave hexagonal 2.5 mm
■■■■■■■■
74
815 Robotic USB Sample Processor XL
Page 83

■■■■■■■■■■■■■■■■■■■■■■
Uds. N° de ped. Descripción
3 6.2709.070 Manguito de guía
For fixation of buret and dosing tips in titration heads and electrode
holders
Material: ETFE
Longitud (mm): 16.5
3 6.2740.020 Tobera de atomización
Para la dispersión fina de la disolución de lavado
Material: ETFE
Diámetro exterior (mm): 10
Longitud (mm): 47
9 Accesorios
1 6.2751.100 Protección contra salpicaduras
Protección contra salpicaduras para Procesadores de muestras con
786 Swing Head
4 T.240.0102 Protección antiparasitaria de ferrito
1 6.2122.0x0 Cable eléctrico con acoplamiento para equi-
pos en frío IEC-60320-C13
Conector eléctrico según las indicaciones del cliente.
Suiza: Tipo SEV 12
6.2122.020
Alemania, …: Tipo CEE(7), VII
6.2122.040
EE.UU., …: Tipo NEMA/ASA
6.2122.070
815 Robotic USB Sample Processor XL
■■■■■■■■
75
Page 84

9.3 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0030
Uds. N° de ped. Descripción
1 8.815.8003ES Manual 815 Robotic USB Sample Processor
XL
■■■■■■■■■■■■■■■■■■■■■■
9.3 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0030
Uds. N° de ped. Descripción
1 1.815.0030 815 Robotic USB Sample Processor XL (1T/
0P)
2 6.1236.020 Manguito EN 14/12 mm
Manguito EN 14/12 con junta tórica.
Material: PP
1 6.1805.110 Tubo de FEP / M6 / 80 cm
Con protección contra luz y doblado.
Material: FEP
Diámetro interior (mm): 2
Longitud (mm): 800
1 6.2151.000 Cable USB A – Mini-DIN 8 polos
Cable para Controller
Longitud (m): 1.8
■■■■■■■■
76
815 Robotic USB Sample Processor XL
Page 85

■■■■■■■■■■■■■■■■■■■■■■
Uds. N° de ped. Descripción
1 6.2621.030 Llave hexagonal 4 mm
Longitud (mm): 73
1 6.2621.070 Llave de hexágono interior 5 mm
5 mm.
Longitud (mm): 80
9 Accesorios
1 6.2621.140 Llave hexagonal 2.5 mm
3 6.2709.070 Manguito de guía
For fixation of buret and dosing tips in titration heads and electrode
holders
Material: ETFE
Longitud (mm): 16.5
815 Robotic USB Sample Processor XL
■■■■■■■■
77
Page 86

9.4 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0110
Uds. N° de ped. Descripción
1 6.2751.100 Protección contra salpicaduras
Protección contra salpicaduras para Procesadores de muestras con
786 Swing Head
4 T.240.0102 Protección antiparasitaria de ferrito
1 6.2122.0x0 Cable eléctrico con acoplamiento para equi-
pos en frío IEC-60320-C13
Conector eléctrico según las indicaciones del cliente.
Suiza: Tipo SEV 12
6.2122.020
Alemania, …: Tipo CEE(7), VII
6.2122.040
EE.UU., …: Tipo NEMA/ASA
6.2122.070
■■■■■■■■■■■■■■■■■■■■■■
1 8.815.8003ES Manual 815 Robotic USB Sample Processor
XL
9.4 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0110
Uds. N° de ped. Descripción
1 1.815.0110 815 Robotic USB Sample Processor XL (2T/
2P)
4 6.1236.020 Manguito EN 14/12 mm
Manguito EN 14/12 con junta tórica.
Material: PP
■■■■■■■■
78
815 Robotic USB Sample Processor XL
Page 87

■■■■■■■■■■■■■■■■■■■■■■
Uds. N° de ped. Descripción
10 6.1446.000 Tapón esmerilado / B-14/(15)
Material: PP
Altura (mm): 30.5
Tamaño del esmerilado: B-14/(15)
6 6.1446.010 Tapón
Para cambiador de muestras
Material: PVDF
Altura (mm): 19
Diámetro exterior (mm): 9.3
9 Accesorios
2 6.1621.000 Bidón / 10 L
Para sistemas automatizados como bidones de lavado y de residuos.
Material: PE
Anchura (mm): 265
Altura (mm): 400
Volumen (mL): 10000
815 Robotic USB Sample Processor XL
■■■■■■■■
79
Page 88

9.4 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0110
Uds. N° de ped. Descripción
6 6.1805.060 Tubo de FEP / M6 / 60 cm
Con protección contra luz y doblado.
Material: FEP
Diámetro interior (mm): 2
Longitud (mm): 600
2 6.1805.110 Tubo de FEP / M6 / 80 cm
Con protección contra luz y doblado.
Material: FEP
Diámetro interior (mm): 2
Longitud (mm): 800
■■■■■■■■■■■■■■■■■■■■■■
2 6.1812.000 Tubo PTFE / 4 m / 4/6 mm
Material: PTFE
Diámetro exterior (mm): 6
Diámetro interior (mm): 4
2 6.1828.000 Niple de conexión PVDF
Para bidón 6.1621.000
Material: PVDF
■■■■■■■■
80
815 Robotic USB Sample Processor XL
Page 89

■■■■■■■■■■■■■■■■■■■■■■
Uds. N° de ped. Descripción
2 6.2053.000 Sujeción de cable
Sujeción para fijar cables
1 6.2151.000 Cable USB A – Mini-DIN 8 polos
Cable para Controller
Longitud (m): 1.8
1 6.2621.030 Llave hexagonal 4 mm
Longitud (mm): 73
9 Accesorios
1 6.2621.070 Llave de hexágono interior 5 mm
5 mm.
Longitud (mm): 80
815 Robotic USB Sample Processor XL
■■■■■■■■
81
Page 90

9.4 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0110
Uds. N° de ped. Descripción
1 6.2621.140 Llave hexagonal 2.5 mm
6 6.2709.070 Manguito de guía
For fixation of buret and dosing tips in titration heads and electrode
holders
Material: ETFE
Longitud (mm): 16.5
■■■■■■■■■■■■■■■■■■■■■■
6 6.2740.020 Tobera de atomización
Para la dispersión fina de la disolución de lavado
Material: ETFE
Diámetro exterior (mm): 10
Longitud (mm): 47
2 6.2751.100 Protección contra salpicaduras
Protección contra salpicaduras para Procesadores de muestras con
786 Swing Head
■■■■■■■■
82
815 Robotic USB Sample Processor XL
Page 91

■■■■■■■■■■■■■■■■■■■■■■
Uds. N° de ped. Descripción
4 T.240.0102 Protección antiparasitaria de ferrito
1 6.2122.0x0 Cable eléctrico con acoplamiento para equi-
pos en frío IEC-60320-C13
Conector eléctrico según las indicaciones del cliente.
Suiza: Tipo SEV 12
6.2122.020
Alemania, …: Tipo CEE(7), VII
6.2122.040
EE.UU., …: Tipo NEMA/ASA
6.2122.070
1 8.815.8003ES Manual 815 Robotic USB Sample Processor
XL
9 Accesorios
9.5 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0120
Uds. N° de ped. Descripción
1 1.815.0120 815 Robotic USB Sample Processor XL (2T/
4P)
4 6.1236.020 Manguito EN 14/12 mm
Manguito EN 14/12 con junta tórica.
Material: PP
10 6.1446.000 Tapón esmerilado / B-14/(15)
Material: PP
Altura (mm): 30.5
Tamaño del esmerilado: B-14/(15)
815 Robotic USB Sample Processor XL
■■■■■■■■
83
Page 92

9.5 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0120
Uds. N° de ped. Descripción
6 6.1446.010 Tapón
Para cambiador de muestras
Material: PVDF
Altura (mm): 19
Diámetro exterior (mm): 9.3
2 6.1446.160 Tapón termómetro / B-14/15 / oblicuo
Para inclinar piezas insertables en el cabezal de valoración
6.1458.010.
Material: PTFE
Altura (mm): 21
Diámetro exterior (mm): 13
Tamaño del esmerilado: B-14/15
■■■■■■■■■■■■■■■■■■■■■■
2 6.1543.170 Punta de aspiración / Rosca M8
Aspiration tip to Sample Processors
Material: PTFE
Longitud (mm): 198
4 6.1621.000 Bidón / 10 L
Para sistemas automatizados como bidones de lavado y de residuos.
Material: PE
Anchura (mm): 265
Altura (mm): 400
Volumen (mL): 10000
■■■■■■■■
84
815 Robotic USB Sample Processor XL
Page 93

■■■■■■■■■■■■■■■■■■■■■■
Uds. N° de ped. Descripción
6 6.1805.060 Tubo de FEP / M6 / 60 cm
Con protección contra luz y doblado.
Material: FEP
Diámetro interior (mm): 2
Longitud (mm): 600
2 6.1805.110 Tubo de FEP / M6 / 80 cm
Con protección contra luz y doblado.
Material: FEP
Diámetro interior (mm): 2
Longitud (mm): 800
9 Accesorios
2 6.1805.510 Tubo PTFE / M8 / 60 cm
Con protección contra doblado
Material: PTFE
Diámetro interior (mm): 3
Longitud (mm): 600
815 Robotic USB Sample Processor XL
■■■■■■■■
85
Page 94

9.5 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0120
Uds. N° de ped. Descripción
4 6.1812.000 Tubo PTFE / 4 m / 4/6 mm
Material: PTFE
Diámetro exterior (mm): 6
Diámetro interior (mm): 4
2 6.1820.070 Acoplador 4/6 mm / M8 interior
Extensión para tubos de aspiración en sistemas automáticos. Conecta
el tubo de aspiración M8 directamente con el tubo 6.1812.000 PTFE.
Material: PTFE
■■■■■■■■■■■■■■■■■■■■■■
4 6.1828.000 Niple de conexión PVDF
Para bidón 6.1621.000
Material: PVDF
2 6.2042.020 Sujeción de punta de bureta (agitador mag-
nético)
Sujeción para la disposición estable de puntas de bureta, tubos de
dosificación o aspiración usando un agitador magnético en el recipiente de valoración de un cambiador de muestras
2 6.2053.000 Sujeción de cable
Sujeción para fijar cables
■■■■■■■■
86
815 Robotic USB Sample Processor XL
Page 95

■■■■■■■■■■■■■■■■■■■■■■
Uds. N° de ped. Descripción
1 6.2151.000 Cable USB A – Mini-DIN 8 polos
Cable para Controller
Longitud (m): 1.8
1 6.2621.030 Llave hexagonal 4 mm
Longitud (mm): 73
9 Accesorios
1 6.2621.070 Llave de hexágono interior 5 mm
5 mm.
Longitud (mm): 80
1 6.2621.140 Llave hexagonal 2.5 mm
815 Robotic USB Sample Processor XL
■■■■■■■■
87
Page 96

9.5 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0120
Uds. N° de ped. Descripción
6 6.2709.070 Manguito de guía
For fixation of buret and dosing tips in titration heads and electrode
holders
Material: ETFE
Longitud (mm): 16.5
6 6.2740.020 Tobera de atomización
Para la dispersión fina de la disolución de lavado
Material: ETFE
Diámetro exterior (mm): 10
Longitud (mm): 47
■■■■■■■■■■■■■■■■■■■■■■
2 6.2751.100 Protección contra salpicaduras
Protección contra salpicaduras para Procesadores de muestras con
786 Swing Head
4 T.240.0102 Protección antiparasitaria de ferrito
1 6.2122.0x0 Cable eléctrico con acoplamiento para equi-
pos en frío IEC-60320-C13
Conector eléctrico según las indicaciones del cliente.
Suiza: Tipo SEV 12
6.2122.020
Alemania, …: Tipo CEE(7), VII
6.2122.040
EE.UU., …: Tipo NEMA/ASA
6.2122.070
■■■■■■■■
88
815 Robotic USB Sample Processor XL
Page 97

■■■■■■■■■■■■■■■■■■■■■■
Uds. N° de ped. Descripción
1 8.815.8003ES Manual 815 Robotic USB Sample Processor
XL
9 Accesorios
9.6 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0130
Uds. N° de ped. Descripción
1 1.815.0130 815 Robotic USB Sample Processor XL (2T/
0P)
4 6.1236.020 Manguito EN 14/12 mm
Manguito EN 14/12 con junta tórica.
Material: PP
2 6.1805.110 Tubo de FEP / M6 / 80 cm
Con protección contra luz y doblado.
Material: FEP
Diámetro interior (mm): 2
Longitud (mm): 800
1 6.2151.000 Cable USB A – Mini-DIN 8 polos
Cable para Controller
Longitud (m): 1.8
815 Robotic USB Sample Processor XL
■■■■■■■■
89
Page 98

9.6 Suministro básico 815 Robotic USB Sample Processor XL 2.815.0130
Uds. N° de ped. Descripción
1 6.2621.030 Llave hexagonal 4 mm
Longitud (mm): 73
1 6.2621.070 Llave de hexágono interior 5 mm
5 mm.
Longitud (mm): 80
■■■■■■■■■■■■■■■■■■■■■■
1 6.2621.140 Llave hexagonal 2.5 mm
6 6.2709.070 Manguito de guía
For fixation of buret and dosing tips in titration heads and electrode
holders
Material: ETFE
Longitud (mm): 16.5
■■■■■■■■
90
815 Robotic USB Sample Processor XL
Page 99

■■■■■■■■■■■■■■■■■■■■■■
Uds. N° de ped. Descripción
2 6.2751.100 Protección contra salpicaduras
Protección contra salpicaduras para Procesadores de muestras con
786 Swing Head
4 T.240.0102 Protección antiparasitaria de ferrito
1 6.2122.0x0 Cable eléctrico con acoplamiento para equi-
pos en frío IEC-60320-C13
Conector eléctrico según las indicaciones del cliente.
Suiza: Tipo SEV 12
6.2122.020
Alemania, …: Tipo CEE(7), VII
6.2122.040
EE.UU., …: Tipo NEMA/ASA
6.2122.070
9 Accesorios
1 8.815.8003ES Manual 815 Robotic USB Sample Processor
XL
9.7 Accesorios opcionales
Uds. N° de ped. Descripción
1 2.786.0010 786 Swing Head con cabezal de transferen-
cia a la izquierda
Equipo adicional para Procesador de muestras robótico XL para la
transferencia / el pipeto de recipientes de muestra pequeños a recipientes de valoración más grandes en la gradilla o a una célula de
valoración externa que se puede colocar a la izquierda de la estación
de trabajo.
815 Robotic USB Sample Processor XL
■■■■■■■■
91
Page 100

9.7 Accesorios opcionales
Uds. N° de ped. Descripción
1 2.786.0020 786 Swing Head con cabezal de transferen-
cia a la derecha
Equipo adicional para Procesador de muestras robótico XL para la
transferencia / el pipeto de recipientes de muestra pequeños a recipientes de valoración más grandes en la gradilla o a una célula de
valoración externa que se puede colocar a la derecha de la estación
de trabajo.
1 2.786.0030 786 Swing Head con brazo pivotante de
valoración, hacia la derecha o la izquierda
Equipo adicional para Procesadores de muestras robóticos XL para
valoración directa con recipientes de muestras de 75 mL y más grandes.
■■■■■■■■■■■■■■■■■■■■■■
1 2.786.0040 786 Swing Head
Equipo adicional para Procesador de muestras robótico XL sin cabezal de valoración o de transferencia.
■■■■■■■■
92
815 Robotic USB Sample Processor XL
 Loading...
Loading...