

Page 1

< > !
R-30+B/ R-30+B Mate CONTROLLER
Optional Function
OPERATOR'S MANUAL
B-83284EN-2/05
Page 2

• Original Instructions
Thank you very much for purchasing FANUC Robot.
Before using the Robot, be sure to read the "FANUC Robot SAFETY HANDBOOK (B-80687EN)"
and understand the content.
• No part of this manual may be reproduced in any form.
• The appearance and specifications of this product are subject to change without notice.
The products in this manual are controlled based on Japan's “Foreign Exchange and
Foreign Trade Law". The export from Japan may be subject to an export license by the
government of Japan. Further, re-export to another country may be subject to the license
of the government of the country from where the product is re-exported. Furthermore, the
product may also be controlled by re-export regulations of the United States government.
Should you wish to export or re-export these products, please contact FANUC for advice.
In this manual, we endeavor to include all pertinent matters. There are, however, a very
large number of operations that must not or cannot be performed, and if the manual
contained them all, it would be enormous in volume. It is, therefore, requested to assume
that any operations that are not explicitly described as being possible are "not possible".
Page 3

B-83284EN-2/05 SAFETY PRECAUTIONS
SAFETY PRECAUTIONS
This chapter describes the precautions which must be observed to ensure the safe use of the robot.
Before attempting to use the robot, be sure to read this chapter thoroughly.
Before using the functions related to robot operation, read the relevant operator's manual to become
familiar with those functions.
For the safety of the operator and the system, follow all safety precautions when operating a robot and its
peripheral devices installed in a work cell.
In addition, refer to the “FANUC Robot SAFETY HANDBOOK (B-80687EN)”.
1 DEFINITON OF USER
The user can be classified as follows.
Operator
Turns the robot controller power ON/OFF
•
Starts the robot program with operator’s panel
•
Programmer
Operates the robot
•
Teaches the robot inside the safety fence
•
Maintenance engineer
Operates the robot
•
Teaches the robot inside the safety fence
•
Maintenance (repair, adjustment, replacement)
•
- “An operator” cannot
- “Programmer”, “Teaching operator”, and “Maintenance engineer” can
The working activities inside the safety fence include lifting, setting, teaching, adjusting,
maintenance, etc.
- To work inside the safety fence, the person must be trained on proper robot operation.
During the operation, programming, and maintenance of your robotic system, programmer, teaching
operator and maintenance engineer must operate with circumspection by using following safety
precautions.
- Adequate clothes for the operation
- Safety shoes
- A helmet
:
:
:
work inside the safety fence
work inside the safety fence.
s-1
Page 4

SAFETY PRECAUTIONS B-83284EN-2/05
2 DEFINITION OF SAFETY NOTATIONS
To ensure the safety of users and prevent damage to the machine, this manual indicates each precaution on
safety with or "WARNING" or "CAUTION" according to its severity. Supplementary information is
indicated by "NOTE". Please read each "WARNING", "CAUTION" and "NOTE" before using the robots.
Symbol Definitions
WARNING
CAUTION
NOTE
• Check this manual thoroughly, and keep it handy for the future reference.
Used if hazard resulting in the death or serious injury of the user will be expected to
occur if he or she fails to follow the approved procedure.
Used if a hazard resulting in the minor or moderate injury of the user, or equipment
damage may be expected to occur if he or she fails to follow the approved procedure.
Used if a supplementary explanation not related to any of WARNING, and CAUTION
is to be indicated.
3 USER SAFETY
User safety is the primary safety consideration. As it is very dangerous to enter the operating area of the
robot during its automatic operation, adequate safety precautions must be observed.
The following lists the general safety precautions. Careful consideration must be made to ensure user
safety.
(1) We obligate the User to take a FANUC training courses.
FANUC provides various training courses. Contact your local FANUC representative for
details.
(2) Even when the robot is stationary, it is possible that the robot is still in a ready to move state, and is
waiting for a signal. In this state, the robot is regarded as still in motion. To ensure user safety,
provide the system with an alarm to indicate visually or aurally that the robot is in motion.
(3) Install a safety fence with a gate so that no user can enter the safety fence inside without passing
through the gate. Install an interlocking device, a safety plug, and so forth in the safety gate so that
the robot is stopped as the safety gate is opened.
The controller is designed to receive this interlocking signal of the door switch. When the
safety fence is opened and this signal received, the controller stops the robot (Please refer to
"STOP TYPE OF ROBOT" in SAFETY PRECAUTIONS for detail of stop type). For
connection, refer to below Fig.3 (b).
(4) Provide the peripheral devices with appropriate grounding (Class A, Class B, Class C, and Class D).
(5) Recommend to install the peripheral device outside of the operating space.
(6) Draw an outline on the floor, clearly indicating the range of the robot motion, including the tools
such as a hand.
(7) Install a mat switch or photoelectric switch on the floor with an interlock to a visual or aural alarm
that stops the robot when a user enters the operating space.
(8) If necessary, install a safety lock so that no one except the user in charge can turn the power on the
robot.
s-2
Page 5

B-83284EN-2/05 SAFETY PRECAUTIONS
The circuit breaker installed in the controller is designed to disable anyone from turning it on
when it is locked with a padlock.
(9) When adjusting each peripheral device independently, make sure to turn the power off the robot.
(10) Operators must take the gloves off while manipulating the operator’s panel or teach pendant.
Operation with gloved fingers may cause an operation error.
(11) Programs, system variables, and other information can be saved on memory card or USB memories.
Be sure to save the data periodically in case the data is lost in an accident.
(12) The robot must be transported and installed by accurate procedure recommended by FANUC.
Wrong transportation or installation may cause the robot to fall, resulting in severe injury to
workers.
(13) In the first operation of the robot after installation, the operation should be restricted to low speeds.
Then, the speed should be gradually increased to check the operation of the robot.
(14) Before the robot is started, it should be checked that no one is in the area of the safety fence. At the
same time, a check must be made to ensure that there is no risk of hazardous situations. If detected,
such a situation should be eliminated before the operation.
(15) Do not operate the robot under the following conditions. Otherwise, the robot and peripheral
equipment can be adversely affected, or workers can be severely injured.
- Flammable
- Explosive
- Massive dose of Radiation
- Under water, high (heavy) Humidity
- Transport human or animals
- Stepladder (climb or hang down)
- Outdoor
(16) When connecting the peripheral devices related to stop(safety fence etc.) and each signal (external
emergency , fence etc.) of robot, be sure to confirm the stop movement and do not take the wrong
connection.
(17) In preparing the trestle, please secure the maintenance engineer safety at high place in reference to
Fig. 3 (c). Design with the Scaffolding and Safety-belt with circumspection.
s-3
Page 6

SAFETY PRECAUTIONS B-83284EN-2/05
RP1
Pulsecoder
RI/RO,XHBK,XROT
RM1
Motor power/brake
EARTH
Safety fence
Interlocking device and safety plug that are activated if the
gate is opened.
Fig. 3 (a) Safety fence and safety gate
WARNING
When you close a fence, please confirm that there is not a person from all
directions of the robot.
Dual chain
Single chain
Emergency sto p board
Panel board
or Panel board
EAS1
EAS11
EAS2
EAS21
Panel board
F ENC E 1
(Note)
(Note)
In case of R-30iA
For the R-30iB, the R-30iB Mate
Terminals EAS1,EAS11,EAS2,EAS21 or FENCE1,FENCE2
Terminals EAS1,EAS11 ,EAS2,EAS21 ar e p rovided on t he
are provided on the operation box or on the terminal block
emergency stop board.
of the printed circuit board.
Refer to th e ELECTRICAL CONNCETIONS Ch apte r of
In case of R-30iA Mate
CONNECTION of
Terminals EAS1,EAS11,EAS2,EAS21 are provided
R-30iB cont rol ler mainte nan ce manual (B-83 195EN) or
on the emergency stop board or connector panel.
(in case of Open air type)
R-30iB Mate controller maintenance manual (B-83525EN)
for details.
Termianls FENCE1,FENCE2 are provided
on the emergency stop board.
Refer to controller maintenance manual for details.
F ENC E 2
Fig. 3 (b) Connection diagram for the signal of safety fence
s-4
Page 7

B-83284EN-2/05 SAFETY PRECAUTIONS
Hook for safety belt
Fence
Steps
Trestle
Pedestal
for maintenance
Fig. 3 (c) Pedestal for maintenance
3.1 OPERATOR SAFETY
The operator is a person who operates the robot system. In this sense, a worker who operates the teach
pendant is also an operator. Operator cannot work inside the safety fence.
(1) If you don’t need to operate the robot, turn the power off the robot controller, or press the
“EMERGENCY STOP” button, and then proceed your work.
(2) Operate the robot system outside of the robot operating space.
(3) Install a safety fence with a safety gate to prevent any worker other than the operator from entering
the dangerous area unexpectedly and the worker from entering a hazardous area.
(4) Install one or more necessary quantity of EMERGENCY STOP button(s) within the operator’s reach
in appropriate location(s) based on the system layout.
The robot controller is designed to be connected to an external EMERGENCY STOP button.
With this connection, the controller stops the robot operation (Please refer to "STOP TYPE
OF ROBOT" in SAFETY PRECAUTIONS for detail of stop type), when the external
EMERGENCY STOP button is pressed. See the diagram below for connection.
Dual cha in
External s top button
Single chain
External stop button
Emerg ency stop board
Panel board
or Panel board
EE S1
EE S11
EES2
EES21
Panel board
EMGIN1
EMGIN2
Fig. 3.1 Connection diagram for external emergency stop button
(Note)
Connect EES1 and EES11, EES2 and EES21
(No te)
For th e R-30iB, the R-30iB Mate
Connect EE S1an d EES 11,EES2 and EE S21or EMG IN 1and E MGIN2.
EES1,EES11,EES2,EES21 are on the emergency stop board
In c ase of R-30i A
EES 1,E ES11, EES2,E ES21 or EMGI N1,EMG IN2 are on the panel board.
Refer to the ELECTRICAL CONNCET IONS Chapter of
CONNECTION of
In c ase of R-30i A Mate
EES 1,E ES11, EES2,EES2 1 are on the em ergen cy stop b oa rd
R-30i B controller maintenance manu al (B-83195EN) or
or connector p anel ( in case of Open air type ).
R-30i B Mate controller maintenance manual (B-83525EN)
EMGIN1,EMGIN2 are on the emergency stop board.
for de tails.
Refer to the mainten ance manual of the controller for details.
s-5
Page 8

SAFETY PRECAUTIONS B-83284EN-2/05
3.2 SAFETY OF THE PROGRAMMER
While teaching the robot, the operator must enter the operating space of the robot. Please ensure the
safety of programmer.
(1) Unless it is specifically necessary to enter the robot operating space, carry out all tasks outside the
area.
(2) Before teaching the robot, check that the robot and its peripheral devices are all in the normal
condition.
(3) If it is inevitable to enter the robot operating space to teach the robot, check the locations, settings,
and other conditions of the safety devices (such as the EMERGENCY STOP button, the
DEADMAN switch on the teach pendant) before entering the area.
(4) The programmer must be extremely careful not to let anyone else enter the robot operating space.
(5) Programming must be done outside of the safety fence as far as possible. If programming needs to be
done in the area of the safety fence, the programmer must take the following precautions:
- Before entering the safety fence area, ensure that there is no risk of hazardous situation in the
area.
- Be ready to press the emergency stop button whenever it is necessary.
- Operate the Robot at low speed.
- Before starting programming, check the entire system status to ensure that no remote instruction
to the peripheral equipment or motion would harm user .
Our operator panel is provided with an emergency stop button and a key switch (mode switch) for selecting the
automatic operation mode (AUTO) and the teach modes (T1 and T2). Before entering the inside of the safety
fence for the purpose of teaching, set the switch to a teach mode, remove the key from the mode switch to prevent
other people from changing the operation mode carelessly, then open the safety gate. If the safety gate is opened
with the automatic operation mode set, the robot stops (Please refer to "STOP TYPE OF ROBOT" in SAFETY
PRECAUTIONS for detail of stop type). After the switch is set to a teach mode, the safety gate is disabled. The
programmer should understand that the safety gate is disabled and is responsible for keeping other people from
entering the inside of the safety fence.
Teach pendant is provided with a switch to enable/disable robot operation from teach pendant and DEADMAN
switch as well as emergency stop button. These button and switch function as follows:
(1) Emergency stop button: Causes the stop of the robot (Please refer to "STOP TYPE OF ROBOT" in SAFETY
PRECAUTIONS for detail of stop type) when pressed.
(2) DEADMAN switch: Functions are different depending on the teach pendant enable/disable switch setting
status.
(a) Enable: Servo power is turned off and robot stops when the operator releases the DEADMAN switch
or when the operator presses the switch strongly.
(b) Disable: The DEADMAN switch is disabled.
(Note) The DEADMAN switch is provided to stop the robot when the operator releases the teach pendant or
presses the pendant strongly in case of emergency. The R-30iB/R-30iB Mate employs a 3-position
DEADMAN switch, which allows the robot to operate when the 3-position DEADMAN switch is pressed
to its intermediate point. When the operator releases the DEADMAN switch or presses the switch
strongly, the robot stops immediately.
The operator’s intention of starting teaching is determined by the controller through the dual operation of setting the
teach pendant enable/disable switch to the enable position and pressing the DEADMAN switch. The operator
should make sure that the robot could operate in such conditions and be responsible in carrying out tasks safely.
Based on the risk assessment by FANUC, number of operation of DEADMAN switch should not exceed about
10000 times per year.
s-6
Page 9

B-83284EN-2/05 SAFETY PRECAUTIONS
The teach pendant, operator panel, and peripheral device interface send each robot start signal. However the
validity of each signal changes as follows depending on the mode switch and the DEADMAN switch of the operator
panel, the teach pendant enable switch and the remote condition on the software.
Mode
AUTO
mode
T1, T2
mode
T1,T2 mode: DEADMAN switch is effective.
Teach pendant
enable switch
On
Off
On
Off
Software
remote
condition
Local Not allowed Not allowed Not allowed
Remote Not allowed Not allowed Not allowed
Local Not allowed Allowed to start Not allowed
Remote Not allowed Not allowed Allowed to start
Local Allowed to start Not allowed Not allowed
Remote Allowed to start Not allowed Not allowed
Local Not allowed Not allowed Not allowed
Remote Not allowed Not allowed Not allowed
Teach pendant Operator panel Peripheral device
(6) To start the system using the operator’s panel, make certain that nobody is in the robot operating
space and that there are no abnormal conditions in the robot operating space.
(7) When a program is completed, be sure to carry out the test operation according to the following
procedure.
(a) Run the program for at least one operation cycle in the single step mode at low speed.
(b) Run the program for at least one operation cycle in the continuous operation mode at low
speed.
(c) Run the program for one operation cycle in the continuous operation mode at the intermediate
speed and check that no abnormalities occur due to a delay in timing.
(d) Run the program for one operation cycle in the continuous operation mode at the normal
operating speed, and check that the system operates automatically without trouble.
(e) After checking the completeness of the program through the test operation above, execute it in
the automatic operation mode.
(8) While operating the sy stem in the automatic operation mode, the teach pendant operator must leave
the safety fence.
3.3 SAFETY OF THE MAINTENANCE ENGINEER
For the safety of maintenance engineer personnel, pay utmost attention to the following.
(1) Must never be in the area during its operation.
(2) A hazardous situation may occur when the robot or the system, are kept with their power-on during
maintenance operations. Therefore, for any maintenance operation, the robot and the system must be
put into the power-off state. If necessary, a lock should be in place in order to prevent any other
person from turning on the robot and/or the system. In case maintenance needs to be executed in the
power-on state, the emergency stop button must be pressed.
(3) If it becomes necessary to enter the robot operation area while the power is on, press the emergency
stop button on the operator panel, or the teach pendant before entering the area. The maintenance
personnel must indicate that maintenance work is in progress and be careful not to allow other
people to operate the robot carelessly.
(4) When entering the area enclosed by the safety fence, the maintenance engineer must check the entire
system in order to make sure that there is no dangerous situation around. In case the worker needs to
enter the safety area whilst a dangerous situation exists, extreme care must be taken, and entire
system status must be carefully monitored.
(5) Before the maintenance of the pneumatic system is started, the supply pressure should be shut off
and the pressure in the piping should be reduced to zero.
s-7
Page 10

SAFETY PRECAUTIONS B-83284EN-2/05
(6) Before the start of maintenance, check the robot and its peripheral devices are all in the normal
condition.
(7) Do not operate the robot in the automatic mode while anybody is in the robot operating space.
(8) In maintaining the robot parallel to a wall or instrument, or when multiple workers are working
nearby, make certain that their escape path is not obstructed.
(9) When a tool is mounted on the robot, or any moving device other than the robot is installed,
such as belt conveyor, careful attention required for those motion.
(10) Assign an expert near the operator panel who can press the EMERGENCY STOP button whenever
he sees the potential danger.
(11) In case of replacing a part, please contact your local FANUC representative. Wrong procedure may
cause the serious damage to the robot and the worker.
(12) Make sure that no impurity into the system in while (in) replacing or reinstalling components.
(13) Turn off the circuit breaker to protect again electric shock in handling each unit or printed circuit
board in the controller during inspection. If there are two cabinets, turn off the both circuit breaker.
(14) A part should be replaced with a part recommended by FANUC. If other parts are used, malfunction
or damage would occur. Especially, a fuse that is not recommended by FANUC should not be used.
Such a fuse may cause not only a damage to the internal parts of the controller but also a fire.
(15) When restarting the robot system after completing maintenance work, make sure in advance that
there is no person in the operating space and that the robot and the peripheral devices are not
abnormal.
(16) In case of remove the motor or brake, suspend the arm by crane or other equipment beforehand to
avoid falling.
(17) Whenever grease is spilled on the floor, remove them as soon as possible to prevent from falling.
(18) The following parts are heated. If a maintenance engineer needs to touch such a part in the heated
state, the worker should wear heat-resistant gloves or use other protective tools.
• Servo motor
• Inside of the controller
• Reducer
• Gearbox
• Wrist unit
(19) Maintenance must be done with appropriate lightning. Be careful that those lightning will not cause
any further danger.
(20) When a motor, reducer, or other heavy load is handled, a crane or other equipment should be used to
protect maintenance engineers from excessive load. Otherwise, the maintenance engineers would be
severely injured.
(21) Must never climb or step on the robot even in the maintenance. If it is attempted, the robot would be
adversely affected. In addition, a misstep can cause injury to the worker.
(22) Secure a pedestal and wear the safety belt in performing the maintenance work in high place.
(23) Remove all the spilled oil or water and metal chips around the robot in the safety fence after
completing the maintenance.
(24) All the related bolts and components must return to the original place in replacing the parts. If some
parts are missing or left (remained), repeat the replacement work until complete the installation.
(25) In case robot motion is required during maintenance, the following precautions should be taken :
• Secure an escape route. And during the maintenance motion itself, monitor continuously the
whole system so that your escape route will not become blocked by the robot, or by peripheral
equipment.
• Keep vigilant attention for the potential danger. and to press the emergency stop button
whenever it is necessary.
(26) Periodic inspection required. (Refer to the robot mechanical manual and controller maintenance
manual.) A failure to do the periodical inspection can may adversely affect the performance or
service life of the robot and may cause an accident
(27) After replacing some parts, a test run required by the predetermined method. (See TESTING section
of “Controller operator’s manual”. During the test run, the maintenance staff must work outside the
safety fence.
s-8
Page 11

B-83284EN-2/05 SAFETY PRECAUTIONS
4 SAFETY OF THE TOOLS AND
PERIPHERAL DEVICES
4.1 PRECAUTIONS IN PROGRAMMING
(1) Adopt a limit switch or other sensor to detect a dangerous state and, if necessary, design the program
to stop the robot when the sensor signal is received.
(2) Design the program to stop the robot when an abnormal condition occurs in any other robots or
peripheral devices, even though the robot itself is normal.
(3) For a system in which the robot and its peripheral devices are in synchronous motion, particular care
must be taken in programming in order not to interfere with each other.
(4) Provide a suitable interface between the robot and its peripheral devices so that the robot can detect
the states of all devices in the system, and can be stopped according to the states.
4.2 PRECAUTIONS FOR MECHANISM
(1) Keep the component cells of the robot system clean, operate the robot where insulated from the
influence of grease, water, and dust.
(2) Don’t use unconfirmed liquid for cutting fluid and cleaning fluid.
(3) Adopt limit switches or mechanical stoppers to limit the robot motion, and avoid the robot from
collisions against peripheral devices or tools.
(4) Observe the following precautions about the mechanical unit cables. Failure to follow precautions
may cause mechanical troubles.
• Use mechanical unit cable that have required user interface.
• Do not add user cable or hose to inside of mechanical unit.
• Please do not obstruct the movement of the mechanical unit when cables are added to outside
of mechanical unit.
• In the case of the model that a cable is exposed, please do not perform remodeling (Adding a
protective cover and fix an outside cable more) obstructing the behavior of the outcrop of the
cable.
• When installing user peripheral equipment on the robot mechanical unit, please pay attention
that equipment does not interfere with the robot itself.
(5) The frequent power-off stop for the robot during operation causes the trouble of the robot. Please
avoid the system construction that power-off stop would be operated routinely. (Refer to bad case
example.) Please perform power-off stop after reducing the speed of the robot and stopping it by
hold stop or cycle stop when it is not urgent. (Please refer to "STOP TYPE OF ROBOT" in
SAFETY PRECAUTIONS for detail of stop type.)
(Bad case example)
• Whenever poor product is generated, a line stops by emergency stop and power-off of the robot
is incurred.
• When alteration is necessary, safety switch is operated by opening safety fence and power-off
stop is incurred for the robot during operation.
• An operator pushes the emergency stop button frequently, and a line stops.
• An area sensor or a mat switch connected to safety signal operates routinely and power-off stop
is incurred for the robot.
• Power-off stop is regularly incurred due to an inappropriate setting for Dual Check Safety
(DCS).
(6) Power-off stop of Robot is executed when collision detection alarm (SRVO-050) etc. occurs. Please
try to avoid unnecessary power-off stops. It may cause the trouble of the robot, too. So remove the
causes of the alarm.
s-9
Page 12

SAFETY PRECAUTIONS B-83284EN-2/05
5 SAFETY OF THE ROBOT MECHANICAL
UNIT
5.1 PRECAUTIONS IN OPERATION
(1) Operating the robot in the jog mode, set it at an appropriate speed so that the operator can manage
the robot in any eventuality.
(2) Before pressing the jog key, be sure to comprehend the robot movement by the key in advance.
5.2 PRECAUTIONS IN PROGRAMMING
(1) Design to arrange avoiding mutual interfere when various robot’s operation area crossover
significantly.
(2) Be sure to specify the predetermined work origin in a motion program so that the robot starts from
the origin and terminates at the origin. Make it possible for the operator to distinguish easily that the
robot motion has terminated at a glance.
5.3 PRECAUTIONS FOR MECHANISMS
Keep the operating space areas of the robot clean, and operate the robot in an environment free of grease,
water, and dust.
5.4 PROCEDURE TO MOVE ARM WITHOUT DRIVE POWER
IN EMERGENCY OR ABNORMAL SITUATIONS
For emergency or abnormal situations (e.g. persons trapped in or pinched by the robot), brake release unit
can be used to move the robot axes without drive power.
Please refer to controller maintenance manual and mechanical unit operator’s manual for using method of
brake release unit and method of supporting robot.
6 SAFETY OF THE END EFFECTOR
6.1 PRECAUTIONS IN PROGRAMMING
(1) Circumspect program with sufficient delay required for the program after executing some control
command in adopting actuators (pneumatic, hydraulic, and electric)
(2) Adopt limit switches for the end effector, and control the robot system by monitoring the state.
7 STOP TYPE OF ROBOT
There are following three types of Stopping Robot.
s-10
Page 13

B-83284EN-2/05 SAFETY PRECAUTIONS
Power-Off Stop (Category 0 following IEC 60204-1)
Servo power is turned off, and the robot stops immediately. Servo power is turned off when the robot is
moving, and the motion path of the deceleration is uncontrolled.
“Power-Off stop” performs following processing.
• An alarm is generated, and then the servo power turns off. Instantly the robot stops.
• Execution of the program is paused.
Frequent Power-Off stop of the robot during operation can cause mechanical problems of the robot.
Avoid system designs that require routine or frequent Power-Off stop conditions.
Controlled stop (Category 1 following IEC 60204-1)
The robot is decelerated until it stops, and servo power is turned off.
“Controlled stop” performs following processing.
• The alarm "SRVO-199 Controlled stop" occurs along with a decelerated stop. The program
execution is paused.
• An alarm is generated, and then the servo power turns off.
Hold (Category 2 following IEC 60204-1)
The robot is decelerated until it stops, and servo power remains on.
“Hold” performs following processing.
• The robot operation is decelerated until it stops. Execution of the program is paused.
WARNING
The stopping distance and time of Controlled stop are longer than those of
Power-Off stop. A risk assessment for the whole robot system which takes into
consideration the increased stopping distance and stopping time, is necessary
when Controlled stop is used.
When the emergency stop button is pressed or the FENCE is open, the stop type of robot is Power-Off
stop or Controlled stop. The configuration of stop type for each situation is called stop pattern. The stop
pattern is different according to the controller type or option configuration.
There are the following 3 Stop patterns.
Stop
pattern
AUTO P-Stop P-Stop C-Stop C-Stop P-Stop
A T1 P-Stop P-Stop - C-Stop P-Stop
T2 P-Stop P-Stop - C-Stop P-Stop
AUTO P-Stop P-Stop P-Stop P-Stop P-Stop
B T1 P-Stop P-Stop - P-Stop P-Stop
T2 P-Stop P-Stop - P-Stop P-Stop
AUTO C-Stop C-Stop C-Stop C-Stop C-Stop
C T1 P-Stop P-Stop - C-Stop P-Stop
T2 P-Stop P-Stop - C-Stop P-Stop
Mode
Emergency
stop
button
P-Stop: Power-Off stop
C-Stop: Controlled stop
-: Disable
The following table indicates the Stop pattern according to the controller type or option configuration.
Option
Standard A (*)
Controlled stop by E-Stop (A05B-2600-J570) C (*)
External
Emergency
stop
FENCE open SVOFF input
R-30iB/ R-30iB Mate
Servo
disconnect
s-11
Page 14

SAFETY PRECAUTIONS B-83284EN-2/05
(*) R-30iB / R-30iB Mate does not have servo disconnect. R-30iB Mate does not have SVOFF input.
The stop pattern of the controller is displayed in "Stop pattern" line in software version screen. Please
refer to "Software version" in operator's manual of controller for the detail of software version screen.
"Controlled stop by E-Stop" option
When "Controlled stop by E-Stop" (A05B-2600-J570) option is specified, the stop type of the following
alarms becomes Controlled stop but only in AUTO mode. In T1 or T2 mode, the stop type is Power-Off
stop which is the normal operation of the system.
Alarm Condition
SRVO-001 Operator panel E-stop Operator panel emergency stop is pressed.
SRVO-002 Teach pendant E-stop Teach pendant emergency stop is pressed.
SRVO-007 External emergency stops External emergency stop input (EES1-EES11, EES2-EES21) is open.
SRVO-408 DCS SSO Ext Emergency Stop In DCS Safe I/O connect function, SSO[3] is OFF.
SRVO-409 DCS SSO Servo Disconnect In DCS Safe I/O connect function, SSO[4] is OFF.
Controlled stop is different from Power-Off stop as follows:
• In Controlled stop, the robot is stopped on the program path. This function is effective for a system
where the robot can interfere with other devices if it deviates from the program path.
• In Controlled stop, physical impact is less than Power-Off stop. This function is effective for
systems where the physical impact to the mechanical unit or EOAT (End Of Arm Tool) should be
minimized.
• The stopping distance and time of Controlled stop is longer than the those of Power-Off stop,
depending on the robot model and axis. Please refer to the operator's manual of a particular robot
model for the data of stopping distance and time.
When this option is loaded, this function cannot be disabled.
The stop type of DCS Position and Speed Check functions is not affected by the loading of this option.
WARNING
The stopping distance and time of Controlled stop are longer than those of
Power-Off stop. A risk assessment for the whole robot system which takes into
consideration the increased stopping distance and stopping time, is necessary
when this option is loaded.
150916
s-12
Page 15

B-83284EN-2/05 TABLE OF CONTENTS
TABLE OF CONTENTS
SAFETY PRECAUTIONS............................................................................s-1
1 PREFACE................................................................................................ 1
1.1 ABOUT MANUAL ..........................................................................................1
2 OVERVIEW .............................................................................................3
3 SOFTFLOAT FUNCTION........................................................................ 5
3.1 JOINT / CARTESIAN SOFTFLOAT............................................................... 5
3.2 PUSHOUT SOFTFLOAT ............................................................................... 9
3.3 KNOWHOW OF SOFTFLOAT..................................................................... 11
3.4 KNOWHOW OF CARTESIAN SOFTFLOAT ...............................................12
3.5 CAUTIONS / RESTRICTIONS..................................................................... 13
4 CONTINUOUS ROTATION FUNCTION ............................................... 15
5 OPERATION GROUP DO OUTPUT FUNCTION..................................20
6 AUTOMATIC ERROR RECOVERY FUNCTION...................................22
6.1 AUTOMATIC ERROR RECOVERY FUNCTION ......................................... 22
6.2 RESUME PROGRAM FUNCTION ..............................................................22
6.3 FAST EXIT/ENTRY FEATURE....................................................................23
6.4 RESUME_PROG INSTRUCTION ...............................................................23
6.5 RETURN_PATH_DSBL INSTRUCTION...................................................... 26
6.6 MAINT_PROG INSTRUCTION.................................................................... 27
6.7 SETTING OF THE AUTOMATIC ERROR RECOVERY FUNCTION........... 30
6.8 MANUAL OPERATION SCREEN OF THE RESUME PROGRAM FUNCTION
..................................................................................................................... 40
6.9 EXECUTION OF THE RESUME PROGRAM FROM THE TEACH PENDANT
AND TEST MODE ....................................................................................... 43
6.10 CHANGING CONDITIONS FOR EXECUTING THE RESUME PROGRAM 43
6.11 OTHER SPECIFICATIONS AND RESTRICTIONS ..................................... 44
6.12 WARNINGS (Be sure to read this section for safety.).................................. 45
7 REMOTE TCP FUNCTION....................................................................46
7.1 SETUP......................................................................................................... 48
8 HIGH SENSITIVITY COLLISION DETECTION..................................... 51
8.1 SPECIFICATION ......................................................................................... 51
8.2 SETTINGS................................................................................................... 51
8.3 COLLISION GUARD SETUP SCREEN....................................................... 52
8.4 PROGRAM INSTRUCTIONS ...................................................................... 53
8.4.1 COL DETECT ON / COL DETECT OFF .............................................................53
8.4.2 COL GUARD ADJUST .........................................................................................54
8.5 CAUTIONS .................................................................................................. 56
9 LOAD ESTIMATION ............................................................................. 57
c - 1
Page 16

TABLE OF CONTENTS B-83284EN-2/05
9.1 OPERATING PROCEDURE........................................................................57
9.2 LOAD ESTIMATION PROCEDURE (for 6-Axis Robots) ............................. 57
9.3 CALIBRATION PROCEDURE (for 6-Axis Robots) ...................................... 61
9.4 OTHER RELATED MATTERS..................................................................... 64
10 PAYLOAD OVER AND PAYLOAD SETTING CONFIRM FUNCTION . 65
10.1 LIMITATIONS .............................................................................................. 66
10.2 PROCEDURE..............................................................................................66
10.2.1 Procedure to Show Payload Over and Payload Setting Confirm Screen ...............66
10.2.2 Procedure to Use Payload Setting Confirm (When Payload is Changed) ..............66
10.2.3 Procedure to Use Payload Over Confirm (When The Program or Payload is
Changed) ................................................................................................................67
11 GRAVITY COMPENSATION.................................................................69
11.1 SYSTEM VARIABLES ................................................................................. 69
11.2 MOTION SCREEN ...................................................................................... 69
11.3 MASTERING ...............................................................................................70
11.3.1 “Normal Mastering” and “GC Mastering” .............................................................70
11.3.2 How to Choose Mastering Method.........................................................................71
11.3.3 Mastering Procedure...............................................................................................71
11.3.4 Guidance of GC Mastering.....................................................................................72
12 OPERATION LOG BOOK..................................................................... 73
12.1 RECORDED EVENTS................................................................................. 75
12.2 SETTING UP BOOK.................................................................................... 78
12.3 OPERATIONS ............................................................................................. 79
12.4 EXTENDED ALARM LOG ...........................................................................83
12.4.1 Setup.......................................................................................................................83
12.4.2 How to Display Alarm Log ....................................................................................84
13 PROGRAM TOOLBOX ......................................................................... 86
13.1 SOFT LIMIT SETTING ................................................................................ 86
14 ADVANCED CONSTANT PATH...........................................................89
14.1 LINEAR DISTANCE.....................................................................................89
14.1.1 How to Use.............................................................................................................90
14.1.2 Limitations..............................................................................................................91
14.1.3 Procedure to Use ....................................................................................................92
14.2 CORNER REGION ...................................................................................... 92
14.2.1 Limitation of the Specifiable CR Value .................................................................93
14.2.2 Limitations..............................................................................................................94
14.3 PROCESS SPEED ...................................................................................... 95
14.3.1 Limitations..............................................................................................................97
14.4 MAX SPEED................................................................................................97
14.4.1 Limitations..............................................................................................................98
15 SINGULARITY AVOIDANCE FUNCTION ............................................99
15.1 HOW TO USE SINGULARITY AVOIDANCE............................................... 99
15.1.1 How to Use Singularity Avoidance in Jogging ......................................................99
15.1.2 How to Use Singularity Avoidance in TPE Program .............................................99
15.2 LIMITATIONS ............................................................................................ 100
15.3 CAUTIONS ................................................................................................ 100
c - 2
Page 17

B-83284EN-2/05 TABLE OF CONTENTS
16 PATH SWITCHING FUNCTION.......................................................... 101
17 AUXILIARY AXIS SERVO OFF (LOCAL STOP) FUNCTION ............107
17.1 SPECIFICATION ....................................................................................... 107
17.2 CONSTRAINTS ......................................................................................... 109
17.3 SETTINGS................................................................................................. 109
17.4 ATTENTION .............................................................................................. 112
17.5 PROGRAMMING.......................................................................................113
18 DUAL MOTOR DRIVE ........................................................................117
18.1 SETUP....................................................................................................... 117
19 MULTI UOP INTERFACE FUNCTION ................................................119
19.1 PERIPHERAL I/O ...................................................................................... 120
19.1.1 Setting of the Number of UOP Set .......................................................................121
19.1.2 Modification and Addition of Signal....................................................................122
19.1.3 HOLD#1 to #N.....................................................................................................123
19.1.4 CSTOPI#1 to #N ..................................................................................................123
19.1.5 START#1 to #N ...................................................................................................124
19.1.6 RSR ......................................................................................................................124
19.1.7 PNSTROBE#1 to #N,PROD_START#1 to #N ...................................................125
19.1.8 CMDENBL#1 to #N ............................................................................................125
19.1.9 SYSRDY#1 to #N ................................................................................................125
19.1.10 PROGRUN#1 to #N,PAUSED#1 to #N ..............................................................125
19.1.11 HELD#1 to #N .....................................................................................................126
19.1.12 FAULT#1 to #N...................................................................................................126
19.1.13 ATPERCH............................................................................................................126
19.2 SELECT PROGRAM .................................................................................126
19.2.1 Setting of Motion Groups Intended by Each UOP Set.........................................128
19.2.2 Select Program at Running or Paused ..................................................................129
19.2.3 Program Edit Screen Display When Operating Motion Group is Changed .........129
19.3 RUN PROGRAM ....................................................................................... 130
19.3.1 Robot Service Request (RSR) ..............................................................................130
19.3.2 Program Number Select (PNS) ............................................................................130
19.4 STOP PROGRAM .....................................................................................130
19.4.1 Pause Program by UOP ........................................................................................130
19.4.2 Abort Program by UOP........................................................................................130
19.4.3 Other.....................................................................................................................131
19.5 SYSYTEM VARIABLES............................................................................. 131
20 ERROR CODE OUTPUT FUNCTION .................................................134
20.1 SPECIFICATION ....................................................................................... 134
20.1.1 Types of Alarms ...................................................................................................134
20.1.2 Input and Output Signals......................................................................................134
20.2 MEANING OF ALARM CODE ................................................................... 135
20.2.1 Severity of Alarm .................................................................................................136
20.2.2 Alarm ID...............................................................................................................137
20.2.3 Alarm Number......................................................................................................138
21 DATA MONITOR FUNCTION .............................................................139
21.1 DATA MONITOR SETUP ..........................................................................140
21.2 DATA MONITOR SCHEDULE................................................................... 146
c - 3
Page 18

TABLE OF CONTENTS B-83284EN-2/05
21.3 PROGRAMMING.......................................................................................149
21.4 DATA MONITOR CHART .......................................................................... 150
22 BRAKE CHECK FUNCTION...............................................................152
22.1 INITIAL SETTING BEFORE USE .............................................................. 152
22.2 START BRAKE CHECK ............................................................................153
22.3 RESULTS OF BRAKE CHECK.................................................................. 154
22.4 LIMITATIONS ............................................................................................ 154
22.5 CAUTION .................................................................................................. 154
23 PANEL WIZARD .................................................................................155
23.1 SETTING UP ............................................................................................. 155
23.1.1 Overview ..............................................................................................................155
23.1.2 Available iPendant Controls.................................................................................158
23.1.3 Setting up Fast Label............................................................................................159
23.1.4 Setting up Fast Lamp............................................................................................160
23.1.5 Setting up Fast Switch..........................................................................................162
23.1.6 Addition of Button Change Control .....................................................................163
23.1.7 Addition of Command Button Control.................................................................166
23.1.8 Addition of Edit Box Control...............................................................................167
23.1.9 Addition of Label Control ....................................................................................168
23.1.10 Addition of Toggle Button Control......................................................................168
23.1.11 Addition of Toggle Lamp Control........................................................................170
23.1.12 Modification of Panel...........................................................................................171
23.1.13 Modification of Control........................................................................................173
23.1.14 Delete of Control..................................................................................................173
23.1.15 Cut/Copy Paste of Control ...................................................................................174
23.1.16 Modification of Page............................................................................................175
23.1.17 Re-creation of Panel .............................................................................................176
23.2 RUN KAREL PROGRAM BY PANEL ........................................................177
23.2.1 Caution for Creation of KAREL Program............................................................177
23.2.2 Creation of Run Button ........................................................................................177
23.3 USAGE ...................................................................................................... 178
23.3.1 Display of Panel ...................................................................................................178
23.3.2 Backup/Restore ....................................................................................................180
24 ENHANCED MIRROR IMAGE ............................................................ 181
24.1 PARALLEL MIRROR IMAGE..................................................................... 182
24.2 ROTATIONAL MIRROR IMAGE................................................................ 184
24.3 MIRROR IMAGE USING EXISTING FRAMES AND MIRROR PLANES, WITH
CONTROLLED ORIENTATION.................................................................185
24.4 MIRROR IMAGE OF EXTENDED AXES................................................... 186
25 CUSTOMIZE SUPPORT FUNCTION..................................................195
25.1 KAREL CONFIG ........................................................................................ 195
25.1.1 KAREL Config Screen.........................................................................................195
25.1.2 Use KAREL Config Screen..................................................................................195
25.1.3 Run KAREL Program ..........................................................................................196
25.1.4 Abort KAREL Program........................................................................................197
25.1.5 Start Mode Config of KAREL program...............................................................198
25.1.6 Detail Screen of KAREL Config..........................................................................199
25.1.7 Limitation and Caution of KAREL Config ..........................................................200
c - 4
Page 19

B-83284EN-2/05 TABLE OF CONTENTS
25.1.8 Cycle Power (R-30iB Controller).........................................................................201
25.2 CUSTOM MENU........................................................................................ 201
25.2.1 Overview ..............................................................................................................201
25.2.2 Starting Custom Menu..........................................................................................201
25.2.3 Set Custom Menu .................................................................................................202
25.2.4 Delete Set .............................................................................................................204
26 KAREL PROGRAM EXECUTION HISTORY RECORD .....................205
26.1 HARDWARE AND SOFTWARE................................................................ 205
26.1.1 Hardware and Software Requirements .................................................................205
26.1.2 Hardware ..............................................................................................................205
26.1.3 Software................................................................................................................205
26.1.4 Performance..........................................................................................................206
26.2 SETUP AND OPERATIONS...................................................................... 206
26.2.1 Setting Up the KAREL Program Execution History Record ...............................206
26.2.2 Dump Selections Screen.......................................................................................207
26.2.3 Task Selection Screen ..........................................................................................208
26.2.4 Stop Logging Tasks Screen ..................................................................................209
26.2.5 List Selected Tasks Screen ...................................................................................211
26.2.6 Event Class Selection Screen ...............................................................................212
26.2.7 Event Detail Selection Screen ..............................................................................214
26.2.8 Enable or Disable All Event Logging ..................................................................214
26.3 LOGGING EVENTS................................................................................... 215
26.3.1 Setting up Events..................................................................................................215
26.3.2 Logging Events to an ASCII File .........................................................................216
26.3.3 ASCII File General Event Information ................................................................216
26.3.4 ASCII File Specific Event Information................................................................217
26.4 EXAMPLES ............................................................................................... 220
26.4.1 Overview ..............................................................................................................220
26.4.2 KAREL Program Example...................................................................................221
26.4.3 Teach Pendant Program Example ........................................................................221
26.4.4 ASCII File Example .............................................................................................222
27 TORQUE LIMIT FUNCTION................................................................223
27.1 TORQUE LIMIT FUNCTION FEATURE .................................................... 224
27.2 TORQUE LIMIT MULTI-AXIS SETUP FUNCTION.................................... 225
27.2.1 Torque Limit Multi-Axis Setup Function.............................................................225
27.3 LIMITATIONS ............................................................................................ 226
27.4 CAUTION .................................................................................................. 226
28 TCP SPEED OUTPUT.........................................................................227
28.1 LIMITATIONS ............................................................................................ 227
28.2 SETTING UP TCP SPEED OUTPUT ........................................................ 228
28.3 TCP SPEED OUTPUT INSTRUCTION ..................................................... 230
29 TP DRAM/FILE STORAGE FUNCTION .............................................232
29.1 STORAGES...............................................................................................232
29.1.1 CMOS Programs ..................................................................................................232
29.1.2 SHADOW Programs ............................................................................................232
29.1.3 SHADOW ONDEMAND Programs ....................................................................233
29.1.4 FILE Programs .....................................................................................................233
29.2 STORAGE CONFIGURATION .................................................................. 233
c - 5
Page 20

TABLE OF CONTENTS B-83284EN-2/05
29.3 SAVE / LOAD PROGRAMS ...................................................................... 238
29.3.1 Save / Load TP Files ............................................................................................238
29.3.2 Copy Programs.....................................................................................................239
29.3.3 Save / Load LS Files ............................................................................................239
29.3.4 Make Backup of Programs ...................................................................................239
29.4 LOADING PROCESS IN PROGRAM EXECUTION .................................. 239
29.5 PROGRAM EXCHANGE FUNCTION WITHOUT ENOUGH MEMORY SPACE
................................................................................................................... 240
29.6 PRECAUTION ........................................................................................... 240
29.6.1 Cause and Remedy for Alarm Occurrence ...........................................................240
30 CYCLE TIME LOGGING ..................................................................... 242
30.1 DISPLAY MODES OF CYCLE TIME ......................................................... 243
30.1.1 Cycle Mode ..........................................................................................................243
30.1.2 Hourly Mode ........................................................................................................244
30.1.3 Line-by-Line Mode ..............................................................................................244
30.2 LOGGING CYCLE TIME ........................................................................... 245
30.2.1 Change Display Format of Cycle Time Data .......................................................245
30.2.2 Save Cycle Time Data ..........................................................................................246
30.2.3 Update Cycle Time Data ......................................................................................246
30.2.4 Display Target Cycle Time Line ..........................................................................246
30.2.5 Display Reference Cycle Time Line ....................................................................247
30.3 EXECUTION EXAMPLE OF SPOT PROGRAM........................................ 248
31 MATH FUNCTION INSTRUCTION .....................................................250
31.1 TYPE OF MATH FUNCTIONS ..................................................................250
31.2 INSTRUCTION FORMAT OF MATH FUNCTION......................................250
31.2.1 Instruction Format of Assignment Statements .....................................................250
31.2.2 Instruction Format of Relational Statements ........................................................251
31.2.3 Instruction Format of Wait Command Statements ...............................................252
31.3 FUNCTION SPECIFICATION OF MATH FUNCTIONS ............................. 252
31.3.1 Square Root(SQRT)........................................................................................252
31.3.2 Trigonometric Function(SIN) .........................................................................252
31.3.3 Trigonometric Function(COS) ........................................................................253
31.3.4 Trigonometric Function(TAN)........................................................................253
31.3.5 Inverse Trigonometric Function(ASIN)..........................................................253
31.3.6 Inverse Trigonometric Function(ACOS) ........................................................254
31.3.7 Inverse Trigonometric Function(ATAN2) ......................................................254
31.3.8 Inverse Trigonometric Function(ATAN) ........................................................255
31.3.9 Exponent...............................................................................................................255
31.3.10 Natural Logarithm ................................................................................................255
31.3.11 Absolute(ABS)................................................................................................256
31.3.12 Truncate(TRUNC) ..........................................................................................256
31.3.13 Round Off(ROUND).......................................................................................256
31.4 BACKGROUND OPERATION OF MATH FUNCTION .............................. 257
31.5 TEACH MATH FUNCTION INSTRUCTION............................................... 257
31.6 RESTRICTION OF TEACHING MATH FUNCTION ..................................259
31.7 EXCEPTIONS AND RESTRICTION.......................................................... 259
32 SERVO TOOL CHANGE FUNCTION .................................................261
32.1 OUTLINE ................................................................................................... 261
c - 6
Page 21

B-83284EN-2/05 TABLE OF CONTENTS
32.1.1 Feature of Function ..............................................................................................261
32.1.2 Basic Specification ...............................................................................................261
32.1.3 Restrictions...........................................................................................................261
32.1.4 System Configuration...........................................................................................263
32.1.5 Outline of Installation...........................................................................................264
32.2 INITIAL SETUP.......................................................................................... 264
32.3 PRELIMINARY TOOL ATTACH OPERATION .......................................... 265
32.4 TOOL CHANGE SETUP............................................................................ 267
32.5 SETTING THE REFERENCE POSITION.................................................. 272
32.5.1 Battery-less Type Tools........................................................................................272
32.5.2 Battery-Mounted Type Tools ...............................................................................272
32.6 TOOL CHANGE INSTRUCTION ............................................................... 273
32.6.1 TOOL DETACH Instruction................................................................................273
32.6.2 TOOL ATTACH Instruction................................................................................273
32.6.3 Sample Program ...................................................................................................273
32.6.4 Forward Execution ...............................................................................................274
32.6.5 Backward Execution.............................................................................................274
32.7 TOOL CHANGE SEQUENCE.................................................................... 275
32.8 TOOL CHANGE STATUS ......................................................................... 275
32.9 TEACHING ................................................................................................ 276
32.9.1 Notice for Teaching..............................................................................................276
32.9.2 Sample Program ...................................................................................................277
32.10 CONSTRUCTION OF SERVO TOOL CHANGE SCREEN........................ 277
32.11 TOOL CHANGE INITIAL SETUP............................................................... 278
32.11.1 Setting Motion Parameters for Servo Tool Axes..................................................278
32.11.2 Assigning Tool Numbers to Servo Tool Axes .....................................................278
32.11.3 Setting System Variables......................................................................................279
32.12 TOOL CHANGE REFERENCE POSITION SETUP METHOD
(BATTERY-LESS TYPE) ........................................................................... 280
32.12.1 Reference Position Setup for Calibration Types 3 and 4 .....................................280
32.12.2 Reference Position Setup for Calibration Types 5 and 6 .....................................282
32.12.3 Quick Mastering Reference Position Setup..........................................................283
32.13 TROUBLESHOOTING............................................................................... 284
32.13.1 The Attach Instruction is Executed when the Tool is not Attached. ....................284
32.13.2 The Robot Stopped during Calibration. ...............................................................285
32.13.3 Calibration Motion Failed. ...................................................................................285
32.13.4 A Different Tool from that Specified by the Attach Instruction is Attached. ......286
32.13.5 The Attached Tool has been Detached by Mistake (without Using the Detach
Instruction). ..........................................................................................................286
32.13.6 The Tool Axis of a Detached Tool has Moved. ...................................................286
32.13.7 The Battery Voltage has Fallen............................................................................287
32.13.8 The Battery Ran Low while the Tool was Detached............................................287
33 OPERATION WITHOUT SHIFT FUNCTION....................................... 288
33.1 JOG OPERATION WITHOUT SHIFT ........................................................ 288
33.2 TEST EXECUTION OPERATION WITHOUT SHIFT................................. 289
34 HIGH SPEED SHIFT KEY FUNCTION ...............................................291
34.1 SETUP FOR HIGH SPEED SHIFT KEY FUNCTION ................................ 291
34.2 HIGH SPEED SHIFT JOG OPERATION................................................... 291
34.3 HIGH SPEED SHIFT TEST EXECUTION OPERATION ........................... 292
c - 7
Page 22

TABLE OF CONTENTS B-83284EN-2/05
35 iRDIAGNOSTICS ................................................................................ 294
35.1 ROBOT CONDTION DETECTION ............................................................ 294
35.1.1 Setup.....................................................................................................................294
35.1.2 Execute Program ..................................................................................................296
35.1.3 Robot Condition Detection Status ........................................................................296
35.1.4 After Replacement................................................................................................297
35.2 SERVO DIAGNOSIS ................................................................................. 297
35.3 MOTION PROFILER ................................................................................. 299
35.3.1 Setup.....................................................................................................................299
35.3.2 Results ..................................................................................................................300
35.3.2.1 Detail ............................................................................................................... 301
36 MENU UTILITY FUNCTION ................................................................ 305
36.1 SETUP ABOUT MENU UTILITY................................................................ 305
36.1.1 Prompt Box Msg ..................................................................................................306
36.1.2 Prompt Box Yes/No Menu ...................................................................................308
36.1.3 List Menu .............................................................................................................310
36.1.4 Status Menu..........................................................................................................313
36.1.5 Operator Entry Menu............................................................................................316
37 4D GRAPHICS FUNCTION.................................................................320
37.1 OVERVIEW ............................................................................................... 321
37.1.1 Graphic Models ....................................................................................................321
37.1.2 Operation Procedure.............................................................................................321
37.2 4D GRAPHICS SCENE ............................................................................. 324
37.2.1 4D GRAPHICS Display .......................................................................................324
37.2.1.1 Visual jog......................................................................................................... 324
37.2.1.2 Jog preview...................................................................................................... 325
37.2.1.3 Set visibility: 4D GRAPHICS display............................................................. 326
37.2.2 4D GRAPHICS Node Map ..................................................................................327
37.2.2.1 4D GRAPHICS edit node map ........................................................................ 327
37.2.2.2 4D GRAPHICS select node map ..................................................................... 328
37.2.2.3 Set Visibility: node map position number ....................................................... 329
37.2.2.4 Data supported by node map ........................................................................... 329
37.2.3 4D GRAPHICS Frame Display............................................................................329
37.2.4 4D GRAPHICS TCP Trace ..................................................................................330
37.2.5 4D GRAPHICS Position Register ........................................................................330
37.2.5.1 Set Visibility: position register number ........................................................... 331
37.2.6 4D GRAPHICS DCS............................................................................................332
37.3 4D EDITOR FUNCTION ............................................................................ 332
37.3.1 OVERVIEW.........................................................................................................332
37.4 FULL SCREEN 4D DISPLAY .................................................................... 333
37.4.1 OVERVIEW.........................................................................................................333
37.4.2 Setup.....................................................................................................................334
37.4.2.1 Requirements ................................................................................................... 334
37.4.2.2 Configuring Microsoft® Internet Explorer...................................................... 334
37.4.3 Operation..............................................................................................................334
37.4.3.1 Accessing The Full Screen 4D Display ........................................................... 334
37.4.3.2 View Adjustment Mode................................................................................... 336
37.4.3.3 Scene Visibility................................................................................................ 337
38 DATA TRANSFER BETWEEN ROBOTS FUNCTION........................ 339
38.1 TERMINOLOGY ........................................................................................ 339
38.2 SETUP....................................................................................................... 340
c - 8
Page 23

B-83284EN-2/05 TABLE OF CONTENTS
38.3 TCP/IP SETUP FOR ROBOGUIDE........................................................... 340
38.4 STANDARD DATA TRANSFER PROGRAM............................................. 341
38.4.1 Program to Get Numeric Register ........................................................................342
38.4.2 Program to Set Numeric Register.........................................................................342
38.4.3 Program to Get Position Register .........................................................................343
38.4.4 Program to Set Position Register..........................................................................344
38.5 RECOVERY FROM ERROR ..................................................................... 345
38.6 KAREL BUILT-IN ....................................................................................... 346
38.6.1 RGET_PORTCMT Built-in ROUTINE...............................................................347
38.6.2 RGET_PORTSIM Built-in ROUTINE ................................................................347
38.6.3 RGET_PORTVAL Built-in ROUTINE ...............................................................348
38.6.4 RGET_PREGCMT Built-in ROUTINE...............................................................349
38.6.5 RGET_REG Built-in ROUTINE..........................................................................349
38.6.6 RGET_REG_CMT Built-in ROUTINE ...............................................................350
38.6.7 RGET_SREGCMT Built-in ROUTINE...............................................................351
38.6.8 RGET_STR_REG Built-in ROUTINE ................................................................351
38.6.9 RNUMREG_RECV Built-in ROUTINE..............................................................352
38.6.10 RNUMREG_SEND Built-in ROUTINE..............................................................353
38.6.11 RPOSREG_RECV Built-in ROUTINE ...............................................................353
38.6.12 RPOSREG_SEND Built-in ROUTINE................................................................354
38.6.13 RSET_INT_REG Built-in ROUTINE..................................................................355
38.6.14 RSET_PORTCMT Built-in ROUTINE ...............................................................356
38.6.15 RSET_PORTSIM Built-in ROUTINE.................................................................356
38.6.16 RSET_PORTVAL Built-in ROUTINE................................................................357
38.6.17 RSET_PREGCMT Built-in ROUTINE ...............................................................358
38.6.18 RSET_REALREG Built-in ROUTINE................................................................358
38.6.19 RSET_REG_CMT Built-in ROUTINE................................................................359
38.6.20 RSET_SREGCMT Built-in ROUTINE ...............................................................359
38.6.21 RSET_STR_REG Built-in ROUTINE.................................................................360
38.7 TIME OUT AND RETRY............................................................................ 361
38.8 LIMITATIONS ............................................................................................ 361
38.9 CAUTION .................................................................................................. 362
38.10 CONFLICT BETWEEN DATA WRITES..................................................... 362
38.11 TROUBLE SHOOTING.............................................................................. 362
39 TOUCH SENSING............................................................................... 365
39.1 ASSIGNMENT OF TOUCH SENSING I/O ................................................ 367
39.2 SETUP OF TOUCH FRAME...................................................................... 369
39.3 SEARCH PATTERN .................................................................................. 372
39.4 TOUCH SCHEDULE ................................................................................. 376
39.5 TOUCH SENSING PROGRAMMING........................................................ 380
39.6 EXECUTION OF TOURCH SENSING PROGRAM ................................... 387
39.7 TOUCHING UP OF TOUCH SENSING PROGRAM .................................389
39.8 MULTIPLE SEARCHES ............................................................................ 392
39.9 COORDINATED TOUCH SENSING ......................................................... 393
40 TOUCH SKIP FUNCTION ................................................................... 396
40.1 TOUCH SKIP SCREEN.............................................................................396
40.2 TOUCH SKIP PROGRAM ......................................................................... 396
40.3 CAUTIONS ................................................................................................ 397
c - 9
Page 24

TABLE OF CONTENTS B-83284EN-2/05
41 MROT INSTRUCTION.........................................................................398
41.1 HOW TO USE MROT ................................................................................ 398
41.2 LIMITATIONS ............................................................................................ 398
42 ROBOT ISOLATION FUNCTION........................................................400
42.1.1 Specification.........................................................................................................400
42.2 METHOD OF OPERATING....................................................................... 400
42.2.1 Operation Panel ....................................................................................................400
42.2.2 DCS Safety Signal: RPI .......................................................................................400
42.3 SYSTEM VARIABLE: $ROBOT_ISOLC.................................................... 401
42.3.1 Teaching to Motion Instruction ............................................................................402
43 ANTI-DEFLECTION FOR EXTERNAL FORCE.................................. 403
43.1 PREPARATION TO CREATE COMPENSATION PROGRAM .................. 403
43.2 HOW TO COMPENSATE.......................................................................... 404
43.3 SETUP CUSTOMIZATION ........................................................................ 405
43.4 RESTRICTIONS ........................................................................................ 405
44 INTERFACE PANEL FUNCTION........................................................ 406
44.1 HOW TO DISPLAY PANEL ....................................................................... 407
44.2 INTERFACE PANEL.................................................................................. 408
44.3 INTERFACE PANEL SETUP SCREEN.....................................................410
44.4 BUTTON TYPE SETUP SCREEN............................................................. 411
44.5 SETTING OF TYPE OF BUTTON ............................................................. 414
44.5.1 Copy and Paste .....................................................................................................414
44.6 BUTTON DETAIL SETUP SCREEN.......................................................... 416
44.6.1 Preview of Button.................................................................................................416
44.6.2 Error Display of Button........................................................................................418
44.7 TYPE OF BUTTON....................................................................................419
44.8 COMMON PROPERTIES .......................................................................... 419
44.9 OPERATION CONDITION ........................................................................ 421
44.9.1 Button Types Supported.......................................................................................421
44.9.2 Operation Condition Setup Screen .......................................................................422
44.10 PUSH BUTTON......................................................................................... 423
44.11 PUSH BUTTON LAMP .............................................................................. 425
44.12 2 CONTACT POINT SWITCH ...................................................................426
44.13 LAMP......................................................................................................... 428
44.14 DIGITAL SWITCH...................................................................................... 429
44.15 DIGITAL DISPLAY..................................................................................... 430
44.16 MISCELLANEOUS SETTING SCREEN.................................................... 431
44.17 EXTERNAL I/F PANEL SELECTION SETUP SCREEN ............................ 433
44.18 BACKUP AND RESTORE ......................................................................... 434
44.19 LIMITATIONS ............................................................................................ 434
45 SPECIAL JOG SEQUENCE................................................................435
45.1 USAGE ...................................................................................................... 435
45.2 SETUP....................................................................................................... 435
45.3 APPLICATION........................................................................................... 435
c - 10
Page 25

B-83284EN-2/05 TABLE OF CONTENTS
46 MOTION INSTRUCTION ENHANCED EDITING ................................ 436
46.1 MOTION INSTRUCTION INSERT AND INSTRUCTION DELETE FUNCTION
................................................................................................................... 436
46.1.1 Usage....................................................................................................................436
46.1.2 Precautions ...........................................................................................................437
46.2 DATA OFFSET FUNCTION....................................................................... 438
46.2.1 Feed Rate Conversion ..........................................................................................438
46.2.2 Position Data Conversion (direct method) ...........................................................441
46.2.3 Position Data Conversion (2 point teach method)................................................443
46.2.4 Precautions ...........................................................................................................445
47 FINISHING FUNCTION PACKAGE ....................................................447
48 JOINT POSITION OUTPUT FUNCTION.............................................448
48.1 HOW TO USE............................................................................................448
48.1.1 Setting by System Variables.................................................................................448
48.1.2 Note ......................................................................................................................448
48.1.3 Example of a Setting ............................................................................................449
49 EXPANDED REGISTERS FUNCTION................................................ 450
49.1 SETTING THE NUMBER OF REGISTERS............................................... 450
49.2 SAVEING AND LOADING FILES .............................................................. 451
49.2.1 LOADING NOT EXPANDED xxxREG.VR.......................................................451
49.2.2 LOADING EXPANDED xxxREG.VR................................................................451
50 STITCH FUNCTION ............................................................................ 453
50.1 SPECIFICATION ....................................................................................... 453
50.1.1 Instruction.............................................................................................................453
50.1.2 Stitch Condition....................................................................................................453
50.1.3 Flow of Stitch Process..........................................................................................455
50.1.4 Other Specifications .............................................................................................456
50.2 ADJUSTMENT........................................................................................... 457
50.3 LIMITATIONS ............................................................................................ 458
50.4 APPENDIX................................................................................................. 459
51 VISUAL DIAGNOSTICS......................................................................460
51.1 CREATING AND EDITING VISUAL DIAGNOSTIC SCREENS ................. 461
51.2 MANAGING SCREENS ............................................................................. 468
51.3 VIEWING VISUAL DIAGNOSTIC SCREENS............................................ 469
52 PDF VIEWER FUNCTION................................................................... 472
52.1 OPENING A PDF DOCUMENT ................................................................. 472
52.2 NAVIGATING WITH THE PDF VIEWER................................................... 473
53 HELP AND DIAGNOSTICS DISPLAY ................................................474
53.1 ONLINE HELP FUNCTION........................................................................ 474
53.2 ALARM CAUSE/REMEDY DISPLAY FUNCTION .....................................475
53.3 HELP/DIAGNOSTICS SCREEN................................................................ 478
53.4 HELP/DIAGNOSTICS MENU .................................................................... 478
54 MAINTENANCE REMINDER .............................................................. 480
54.1 MAIN MENU .............................................................................................. 480
c - 11
Page 26

TABLE OF CONTENTS B-83284EN-2/05
54.2 SETUP....................................................................................................... 480
54.2.1 Common Setting...................................................................................................481
54.2.2 Maintenance Item Setting.....................................................................................482
54.3 CHECK MAINTENANCE TIME AND COMPLETE MAINTENANCE ......... 484
54.3.1 Check Maintenance Time.....................................................................................484
54.3.2 Maintenance Remind............................................................................................485
54.3.3 Upon Completion of Maintenance .......................................................................485
54.4 iRConnect..................................................................................................486
54.4.1 Setup for Maintenance Reminder.........................................................................487
54.5 MAINTENANCE RECORD ........................................................................ 487
54.5.1 Display Maintenance Record ...............................................................................487
54.5.2 Maintenance Record File......................................................................................488
55 HMI DEVICE COMMUNICATION........................................................490
55.1 CONNECTION OF HMI DEVICE............................................................... 491
55.1.1 RS-232-C Connection ..........................................................................................491
55.1.2 Ethernet Connection .............................................................................................493
55.2 MODBUS COMMUNICATION ................................................................... 494
55.2.1 MODBUS data model ..........................................................................................494
55.2.2 Correspondence of MODBUS Address to Robot Data ........................................494
55.2.3 MODBUS Function Code ....................................................................................495
55.3 ASSIGNMENT OF HOLDING REGISTERS .............................................. 495
55.3.1 Data type of Holding Registers ............................................................................497
55.3.2 Assign Robot Registers ........................................................................................497
55.3.3 Assign Position Registers .....................................................................................499
55.3.4 Assign String Registers ........................................................................................502
55.3.5 Assign Current Position........................................................................................503
55.3.6 Assign Alarm History...........................................................................................504
55.3.7 Assign Program Execution Status ........................................................................506
55.3.8 Assign System Variables......................................................................................508
55.3.9 Assign comment of R[ ], PR[ ] , SR[ ] and I/O.....................................................509
55.3.10 Assign I/O data and simulation status ..................................................................510
55.3.11 Assign Integrated PMC address data....................................................................512
55.3.12 Assign Symbol and Comment of Integrated PMC address ..................................513
55.3.13 Hints .....................................................................................................................513
56 FAULT & INCIDENT REPORT............................................................516
56.1 ALARMS REPORTING SCREEN.............................................................. 516
c - 12
Page 27

B-83284EN-2/05 1. PREFACE
1 PREFACE
This chapter explains the manual plan.
1.1 ABOUT MANUAL
About this manual
FANUC Robot series (R-30iB/R-30iB Mate CONTROLLER) Optional Function OPERATOR’S
MANUAL.
This manual describes how to operate the FANUC Robot, an all-purpose compact robot. It is controlled by
the FANUC R-30iB and R-30iB Mate controller (called the robot controller hereinafter) containing the
FANUC Robot software.
This manual describes the software optional functions. Each chapter describes one software option. Please
select and refer to the chapters describing your required function.
- 1 -
Page 28
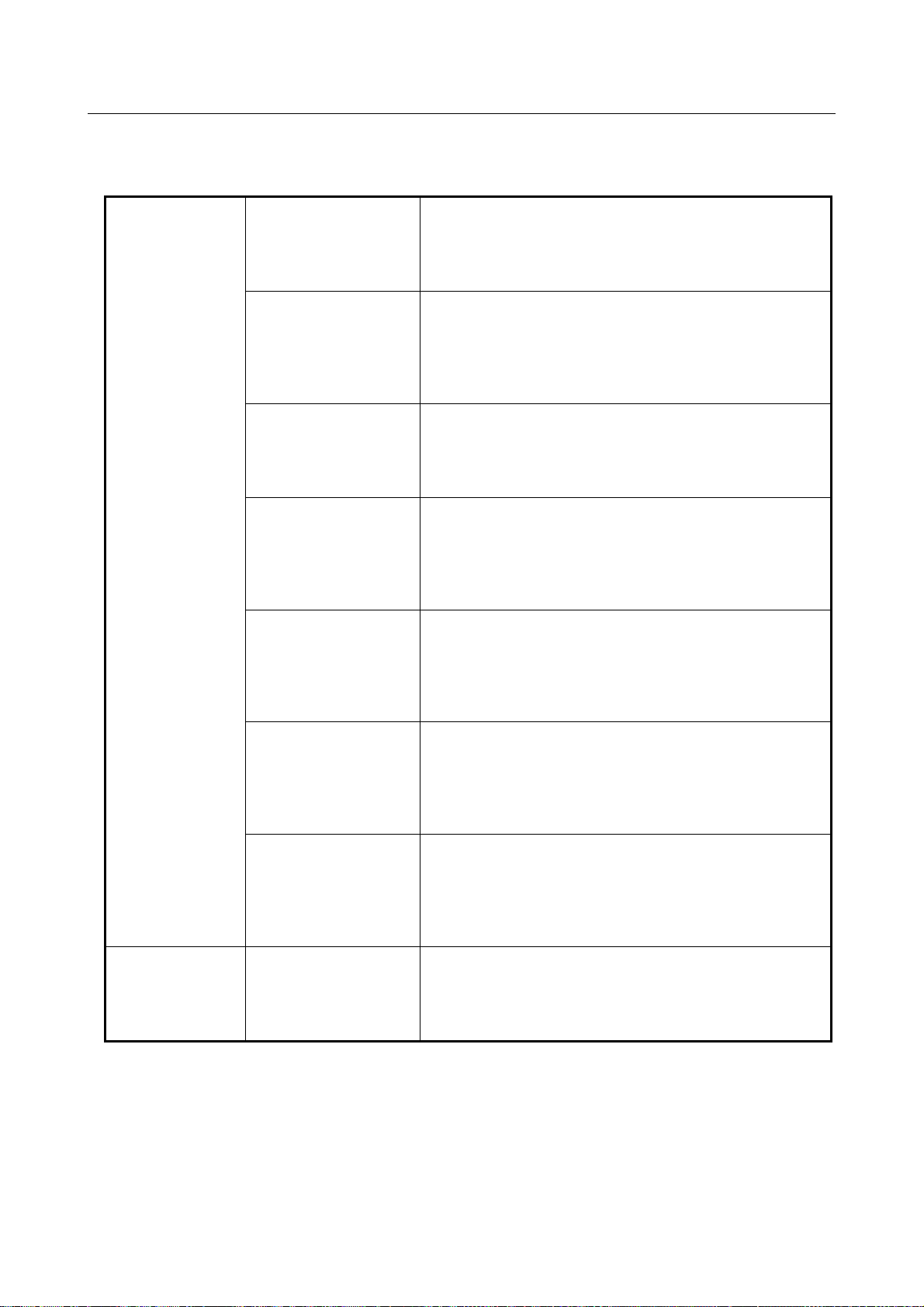
1. PREFACE B-83284EN-2/05
Related manuals
The following manuals are available:
Robot controller
Mechanical unit OPERATOR’S MANUAL Topics:
Optional Function
OPERATOR’S MANUAL
B-83284EN-2
(This manual)
OPERATOR’S MANUAL
(Basic Operation)
B-83284EN
OPERATOR'S MANUAL
(Alarm Code List)
B-83284EN-1
Arc Welding Function
OPERATOR’S MANUAL
B-83284EN-3
Spot Welding Function
OPERATOR’S MANUAL
B-83284EN-4
Dispense Function
OPERATOR’S MANUAL
B-83284EN-5
MAINTENANCE MANUAL
B-83195EN (for R-30iB),
B-83525EN (for R-30iB
Mate)
B-83555EN (for R-30iB
Mate Open Air )
Topics:
Description of the software optional functions.
Use:
Guide to teaching, introducing, and adjusting the robot at the work
site, and application designing.
Topics:
Functions, operations and the procedure for operating the robot.
Programming procedure, interface and alarm.
Use:
Guide to teaching, introducing, and adjusting the robot at the work
site, and application designing.
Topics:
Error code listings, causes, and remedies.
Use:
Installing and activating the system, connecting the mechanical
unit to the peripheral device and maintenance the robot.
Topics:
Description of the setting and operation for arc welding application
software.
Use:
Guide to teaching, introducing, and adjusting the robot at the work
site, and application designing.
Topics:
Description of the setting and operation for spot welding
application software.
Use:
Guide to teaching, introducing, and adjusting the robot at the work
site, and application designing.
Topics:
Description of the setting and operation for dispense application
software.
Use:
Guide to teaching, introducing, and adjusting the robot at the work
site, and application designing.
Topics:
Installing and activating the system, connecting the mechanical
unit to the peripheral device and maintenance the robot.
Installing and activating the robot, connecting the mechanical unit
to the controller, maintaining the robot.
Use:
Guide to installation, activation, connection, and maintenance.
- 2 -
Page 29

B-83284EN-2/05 2. OVERVIEW
2 OVERVIEW
This manual describes the following software options.
Chapter 3 SOFT FLOAT FUNCTION
Chapter 4 CONTINUOUS ROTATION FUNCTION
Chapter 5 OPERATION GROUP DO OUTPUT FUNCTION
Chapter 6 AUTOMATIC ERROR RECOVERY FUNCTION
Chapter 7 REMOTE TCP FUNCTION
Chapter 8 HIGH SENSITIVITY COLLISION DETECTION
Chapter 9 LOAD ESTIMATION
Chapter 10 PAYLOAD OVER AND PAYLOAD SETTING CONFIRM FUNCTION
Chapter 11 GRAVITY COMPENSATION
Chapter 12 OPERATION LOG BOOK
Chapter 13 PROGRAM TOOLBOX
Chapter 14 ADVANCED CONSTANT PATH
Chapter 15 AUTO SINGULARITY AVOIDANCE FUNCTION
Chapter 16 PATH SWITCHING FUNCTION
Chapter 17 AUXILIATY AXIS SERVO OFF (LOCAL STOP) FUNCTION
Chapter 18 DUAL MOTOR DRIVE
Chapter 19 MULTI UOP INTERFACE FUNCTION
Chapter 20 ERROR CODE OUTPUT FUNCTION
Chapter 21 DATA MONITOR FUNCTION
Chapter 22 BRAKE CHECK FUNCTION
Chapter 23 PANEL WIZARD
Chapter 24 ENHANCED MIRROR IMAGE
Chapter 25 CUSTOMIZE SUPPORT FUNCTION
Chapter 26 KAREL PROGRAM EXECUTION HISTORY RECORD
Chapter 27 TORQUE LIMIT FUNCTION
Chapter 28 TCP SPEED OUTPUT INSTRUCTION
Chapter 29 TP DRAM/FILE STORAGE FUNCTION
Chapter 30 CYCLE TIME TRACKING
Chapter 31 MATH FUNCTION INSTRUCTION
Chapter 32 SERVO TOOL CHANGE FUNCTION
Chapter 33 OPERATION WITHOUT SHIFT FUNCTION
Chapter 34 HIGH SPEED SHIFT FUNCTION
Chapter 35 iRDiagnostics
Chapter 36 MENU UTILITY FUNCTION
Chapter 37 4D GRAPHICS FUNCTION
Chapter 38 DATA TRANSFER BETWEEN ROBOTS FUNCTION
Chapter 39 TOUCH SENSING
Chapter 40 TOUCH SKIP FUNCTION
Chapter 41 MROT INSTRUCTION
Chapter 42 ROBOT ISOLATION FUNCTION
Chapter 43 ANTI-DEFLECTION FOR EXTERNAL FORCE
Chapter 44 INTERFACE PANEL FUNCTION
Chapter 45 SPECIAL JOG SEQUENCE
Chapter 46 MOTION INSTRUCTION ENHANCED EDITING
Chapter 47 FINISHING FUNCTION PACKAGE
Chapter 48 JOINT POSITION OUTPUT FUNCTION
Chapter 49 EXPANDED REGISTERS FUNCTION
Chapter 50 STITCH FUNCTION
Chapter 51 VISUAL DIAGNOSTICS
- 3 -
Page 30

2. OVERVIEW B-83284EN-2/05
Chapter 52 PDF VIEWER FUNCTION
Chapter 53 HELP AND DIAGNOSTICS DISPLAY
Chapter 54 MAINTENANCE REMINDER
Chapter 55 HMI DEVICE COMMUNICATION
Chapter 56 FAULT & INCIDENT REPORT
- 4 -
Page 31

B-83284EN-2/05 3. SOFTFLOAT FUNCTION
3 SOFTFLOAT FUNCTION
Usually, the robot moves accurately toward the goal specified using the teach pendant (taught point).
When the robot is used to mount workpieces on a machine tool, variances in workpiece precision may result
in a shift in the workpiece position relative to the tool, thus possibly causing interference between the
workpiece and tool.
A softfloat function has been added which is effective in mounting workpieces with variances in precision
onto a machine tool.
The softfloat function is also very effective if the synchronization speed is unstable as in the extraction of
workpieces in sync with hydraulic extrusion, and if workpieces that the robot cannot grip accurately, such
as rough-machined workpieces, are to be handled.
3.1 JOINT / CARTESIAN SOFTFLOAT
Function
The joint / Cartesian softfloat function works as follows:
● Two types of softfloat are supported: joint softfloat for specifying the softness related to the direction
of rotation of each arm of the robot, and Cartesian softfloat for specifying the softness on the Cartesian
axes.
● The function is enabled/disabled using an instruction in the program. Its conditions are also specified
using the instruction.
● ”Servo flexibility” can be specified for each axis. The term servo flexibility indicates how strongly the
axis resists external forces. It is specified between 0% and 100%. A servo flexibility of 100%
corresponds to being the most flexible. The servo flexibility is specified using a condition table that
contains a set of data for one group (for nine axes).
● If an external force above a certain level (so high as to overcome a static frictional force) is applied to
a robot, the axis of the robot is pressed and moved.
● An external force applied to a robot may prevent it from reaching the taught point. The distance
between the taught point and the point the robot can reach is nearly proportional to the magnitude of
the external force.
● If static load is applied to a robot, the robot controls force to maintain its attitude even if the softfloat
function is enabled.
The detailed descriptions of the softfloat function follow.
Program instruction
The following three program instructions related to the softfloat function are supported.
- SOFTFLOAT[n]
The softfloat function is enabled using condition n.
* The setting of softfloat condition is explained in ”Condition setting menu”.
- SOFTFLOAT END
The softfloat function is disabled.
- FOLLOW UP
When an external force is removed from a robot, it usually tries to go back to the taught point.
However, this instruction causes the robot to assume that the current position is the taught point, and
prevents it from going back to the taught point.
- 5 -
Page 32

3. SOFTFLOAT FUNCTION B-83284EN-2/05
Softfloat function effective range
The SOFTFLOAT[n] instruction can be used in two modes; in one mode it is used solely in a program and
in the other mode it is used as an auxiliary motion instruction after a motion statement. The range in which
the softfloat function is effective for robot operation is determined according in to which mode this
instruction is used.
- Sole instruction
The softfloat function is enabled after the end of the motion specified on the line preceding the solely
specified SOFTFLOAT[n] instruction.
In the following example, the softfloat function is enabled after the motion specified on line 1 ends,
and disabled by SOFTFLOAT END on line 5.
1: J P[1] 100% FINE
2: SOFTFLOAT[1]
3: L P[2] 100mm/sec FINE
4: L P[3] 100mm/sec FINE
5: SOFTFLOAT END
P[1] P[2] P[3]
The soft float function is enabled.
- Auxiliary motion instruction
The softfloat function becomes enabled during execution of a motion statement attached with a
SOFTFLOAT [n] instruction.
The point at which the softfloat function becomes enabled is determined by a softfloat condition ”Exec
Start Ratio”.
Auxiliary motion instruction is specified as the ratio (from 0% to 100% in 1% steps) of a distance to be
traveled before the robot reaches the taught point corresponding to a motion statement attached with a
SOFTFLOAT[n].
In the following example, the softfloat function is effective between P[1] taught using a motion
statement on line 1 and P[2] taught using a motion statement on line 2 attached with the
SOFTFLOAT[n] instruction.
1: J P[1] 100% FINE
2: L P[2] 100mm/sec FINE SOFTFLOAT[1]
3: L P[3] 100mm/sec FINE
4: SOFTFLOAT END
P[1] P[2] P[3]
100%
50%
0%
The soft float function is enabled.
NOTE
The auxiliary motion instruction is not supported by Cartesian softfloat.
- Condition setting menu
The softfloat conditions are specified on the [SETUP Softfloat] menu, which consists of the following
two menus.
● List menu
- 6 -
Page 33

B-83284EN-2/05 3. SOFTFLOAT FUNCTION
● Detail menu
A function key is used to select either menu.
- Pressing the F3, DETAIL key on the list menu selects the detail menu.
- Pressing the F3, LIST key on the detail menu selects the list menu.
Up to 10 conditions can usually be specified for the softfloat function.
List menu
SETUP/SOFTFLOAT
Group1 1/10
No Type Start(%) Comment
1 JOINT 0 [ ]
2 CART ********[ ]
3 CART ********[ ]
4 CART ********[ ]
5 CART ********[ ]
6 CART ********[ ]
7 CART ********[ ]
8 CART ********[ ]
9 CART ********[ ]
10 CART ********[ ]
[ TYPE ] GROUP DETAIL
F3, DETAIL F3, LIST
Joint softfloat screen Cartesian softfloat screen
SOFTFLOAT(JOINT)
1/11
Group1
1 Schedule No[ 1]:[****************]
2 Exec start ratio : 0 %
3 Axis1 Soft ratio : 0 % DISABLE
4 Axis2 Soft ratio : 0 % DISABLE
5 Axis3 Soft ratio : 0 % DISABLE
6 Axis4 Soft ratio : 0 % DISABLE
7 Axis5 Soft ratio : 0 % DISABLE
8 Axis6 Soft ratio : 0 % DISABLE
9 Axis7 Soft ratio : 0 % DISABLE
10 Axis8 Soft ratio : 0 % DISABLE
[TYPE] NUMBER LIST JOINT CART
GROUP LIST
>
>
SOFTFLOAT(CARTESIAN)
1/9
Group 1
1 Schedule No[ 2]:[****************]
2 Enable/Disable : [DISABLE]
3 Coordinate : [WORLD]
Soft Rat Soft Tol
4 X direction: [ 0]% [ 0]%
5 Y direction: [ 0]% [ 0]%
6 Z direction: [ 0]% [ 0]%
7 X rotation: [ 0]% [ 0]%
8 Y rotation: [ 0]% [ 0]%
9 Z rotation: [ 0]% [ 0]%
[TYPE] NUMBER LIST JOINT CART
GROUP LIST
The following data can be specified on the detail menu.
Table 3.1 Setting items of softfloat detail menu
Items Descriptions
Condition No. /
Comment
Exec start ratio
Softfloat condition number. By default, ten numbers can be set.
Pressing the [ENTER] key with the cursor on line 1 enables entering a comment. The
comment text can be specified in the same way as on other menus.
Line 2 specifies the point where the softfloat function is enabled if the SOFTFLOAT [n] is used
as an auxiliary motion instruction. See ”Softfloat function effective range” for the softfloat start
ratio.
>
>
- 7 -
Page 34

3. SOFTFLOAT FUNCTION B-83284EN-2/05
Items Descriptions
Soft ratio
Enable/Disable
Coordinate
X direction etc.
Soft ratio for each axis can be specified on line 3 and the subsequent lines. The soft ratio
indicates how strongly the axis resists external forces. It is specified between 0% and 100%.
A soft ratio of 100% corresponds to being the most flexible.
Whether the softfloat function is enabled/disabled can be specified for each axis on line 3 and
the subsequent lines. Setting the cursor at the rightmost end (enabled/disabled setting
position) of each line causes the F4 (ENABLE) and F5 (DISABLE) keys to appear.
Use these keys to specify whether to enable/disable the softfloat function.
NOTE Pressing the F2 (NUMBER) key selects another page of the detail menu for other
conditions.
10 Axis8 Soft ratio : 0 % DISABLE
11 Axis9 Soft ratio : 0 % DISABLE
[ TYPE ] NUMBER LIST JOINT CART >
10 Axis8 Soft ratio : 0 % DISABLE
11 Axis9 Soft ratio : 0 % DISABLE
[ TYPE ] NUMBER LIST ENABLE DISABLE >
When this item is set to DISABLE, softfloat cannot be executed.
Select one of WORLD, USER, and TOOL.
NOTE If the remote TCP is used, USER indicates the coordinate system on the remote TCP.
Set the softness on or around the X-, Y-, and Z-axes. If Soft Rat increases, the spring constant
decreases, allowing the robot to move with less force.
If Soft Tol increases, the maximum force and moment applied by the robot in that direction
decreases, allowing the robot to move with less force.
The difference between Soft Rat and Soft Tol is illustrated below.
Force or moment
Soft Tol
Soft Rat
Position deviation
Operation area limitation
Operation area during Cartesian softfloat is able to be limited.
If the position error between TCP of motion command and actual TCP in the frame which is set in softfloat
schedule exceeds the threshold, alarm occurs and robot stops.
For safety, following system variables have to be set to avoid interference before the program which
executes Cartesian softfloat runs.
To reflect new value of these system variables, power OFF/ON is necessary.
- 8 -
Page 35

B-83284EN-2/05 3. SOFTFLOAT FUNCTION
• $param_group[g].$cb_mass =1.0 :enable limitation
• $param_group[g].$cb_ix =Threshold in X direction [mm]
(0.0 occurs alarm)
• $param_group[g].$cb_iy =Threshold in Y direction [mm]
(0.0 occurs alarm)
• $param_group[g].$cb_iz =Threshold in Z direction [mm]
(0.0 occurs alarm)
3.2 PUSHOUT SOFTFLOAT
Pushout softfloat is suitable for the extraction of workspaces in sync with hydraulic extrusion.
Each softfloat type has the following features.
Each softfloat schedule can select different softfloat type.
- Joint softfloat
Softness around robot joint can be specified.
- Cartesian softfloat
Softness along Cartesian coordinate and around Cartesian coordinate can be specified.
It is good at contouring and face matching with robot motion.
- Pushout softfloat
In this softfloat, force and moment necessary become smaller than current Cartesian softfloat.
Softness around Cartesian coordinate can not be specified.
This softfloat does not work in where J5 = -3.5~+3.5 [deg].
It is good at following the pushout.
Procedure 3-1 Procedure to show pushout softfloat screen
Select “PUSH” in softfloat detail screen.
Step
1 Press [MENU] key to show screen list.
2 Select “6 SETUP”.
3 Push F1, [TYPE] key to show screen list.
4 Select “softfloat”. Softfloat list screen will be displayed.
SETUP/SOFTFLOAT
Group1 10/10
No Type Start(%) Comment
1 CART ********[ ]
2 CART ********[ ]
3 CART ********[ ]
4 CART ********[ ]
5 CART ********[ ]
6 CART ********[ ]
7 CART ********[ ]
8 CART ********[ ]
9 CART ********[ ]
10 CART ********[ ]
[ TYPE ] GROUP DETAIL
5 Set cursor on schedule No. to set pushout softfloat, and push F3, DETAIL key.
6 Push NEXT key until “PUSH” are shown on function key line.
7 Push F4, PUSH key. Detail screen of pushout softfloat will be displayed.
- 9 -
Page 36

3. SOFTFLOAT FUNCTION B-83284EN-2/05
SOFTFLOAT(PUSHOUT)
Group1 1/6
1 Schedule No.[10]:[**************]
2 Enable/Disable:[DISABLE]
3 Coordinate:[WORLD]
Motion Type
4 J1:[PUSH ] J2:[PUSH ] J3:[PUSH ]
5 J4:[PUSH ] J5:[PUSH ] J6:[PUSH ]
6 Soft direction:[None ]
[ TYPE ] NUMBER LIST
Procedure 3-2 Procedure to set pushout softfloat
In addition to the setup of Cartesian softfloat, “motion type” and “soft direction” should be set. “Soft rat”
and ”soft tol” are removed.
Step
1 Set “enable/disable” and “coordinate” same as current softfloat.
2 Set “soft direction” to the direction which should be soft in the schedule No.
3 Set motion type of the axis which should move passively following the force from outside to “FREE”.
Only one axis can be “FREE” in one group.
SOFTFLOAT(PUSHOUT)
Group1 4/6
1 Schedule No.[10]:[**************]
2 Enable/Disable:[ENABLE]
3 Coordinate:[WORLD]
Motion Type
4 J1:[PUSH ] J2:[PUSH ] J3:[FREE ]
5 J4:[PUSH ] J5:[PUSH ] J6:[PUSH ]
6 Soft direction:[None ]
[ TYPE ] NUMBER LIST
Example)
When J1 is 90 degree, to make X direction of world coordinate soft, motion type of J1 should be “FREE”.
- 10 -
Page 37

B-83284EN-2/05 3. SOFTFLOAT FUNCTION
Procedure 3-3 Procedure to use pushout softfloat
Procedure is the same as that of joint/Cartesian softfloat function.
Step
1 In edit screen, open the program to use pushout softfloat.
2 Push NEXT key until [INST] is shown on function key.
3 Teach softfloat[…] instruction on the line to start pushout softfloat.
4 Set softfloat schedule No. of pushout softfloat in the index of softfloat[…] instruction.
5 Teach softfloat end instruction on the line to stop pushout softfloat.
1: J P[1] 100% FINE
2: SOFTFLOAT[10]
3: WAIT 10.00(sec)
4: SOFTFLOAT END
3.3 KNOWHOW OF SOFTFLOAT
Timing to start softfloat
Force from outside should not be added when softfloat starts.
If softfloat starts with not only gravity force but also force from outside, robot will move above or below,
and “Stop/Move error excess” or “Softfloat time out” alarm will occur.
For example in pushout handing application, you should make program as that softfloat starts before hand
closed.
This know-how is effective in all softfloat of joint, Cartesian and pushout.
Bad example)
1: CALL HNDCLOSE
2: SOFTFLOAT[10]
3: WAIT 10.00(sec)
4: SOFTFLOAT END
Good example)
1: SOFTFLOAT[10]
2: CALL HNDCLOSE
3: WAIT 10.00(sec)
4: SOFTFLOAT END
Know-how to improve softness
Even with the same softfloat schedule setting, the softness of softfloat differs depending on the direction of
the motion just before softfloat starts.
It is caused by the feature of that softfloat is more soft to move in the same direction to the motion just
before and less soft to move in the opposite direction to the motion just before.
So, you should make program as that just before softfloat starts, move robot a little in the direction opposite
to the direction robot should move by softfloat, then move robot back to the position to start softfloat. The
distance necessary is 1~2[mm] or longer.
For example, when you want to start softfloat to move in +X direction in P[1], you should add the following
motion instruction between the motion instruction to P[1] and softfloat instruction.
Force from outside will be added if
softfloat starts after hand closed.
Force from outside will not be
added if softfloat starts before hand
closed.
- 11 -
Page 38

3. SOFTFLOAT FUNCTION B-83284EN-2/05
1: J P[1:sflt start pos] 100% FINE
2: L P[2:-x1mm] 100mm/sec CNT0 INC
3: L P[3:+x1mm] 100mm/sec CNT0 INC
4: SOFTFLOAT[10]
5: CALL HNDCLOSE
6: WAIT 10.00(sec)
7: SOFTFLOAT END
To go back to P[1] in the next line,
move opposite direction in this line.
Move back to P[1] in the the direction
to move by softfloat.
By this method, robot will become more soft to move +X direction and less soft to move –X direction.
This know-how is effective in all softfloat of joint, Cartesian and pushout.
Bad example)
Motion direction just
before softfloat
P[1]
Direction to move by softfloat
Good example)
Motion direction just
before softfloat =P[3] INC
P[1]
Direction to move by softfloat
3.4 KNOWHOW OF CARTESIAN SOFTFLOAT
Softness along Cartesian coordinate and around Cartesian coordinate can be specified.
It is good at contouring and face matching with robot motion.
Know-how to use it effectively will be explained.
All application common know-how
- Layout and tool selection
Area in 10~20[%] inside from the outside border of mechanical unit operation area is recommended.
And select the tool as short as possible.
Area suitable
for softfloat
Mechanical unit
operation area
- Schedule setup
Set 100% in “soft rat” of the direction or rotation that you want to make soft.
Adjust “soft tol” of pushing direction to limit force to avoid pushing with too large force.
- Velocity teaching
In softfloat with robot motion, robot may keep still with small velocity taught.
Teach the velocity more than about 100 mm/s.
Contouring application know-how
- Schedule setup
Example) In case pushing Z direction
- 12 -
Page 39

B-83284EN-2/05 3. SOFTFLOAT FUNCTION
X direction 100 % 0 %
Y direction 100 % 0 %
Z direction 0 % 70 % Limit force to avoid pushing with too large force.
X rotation 0 % 0 %
Y rotation 0 % 0 %
Z rotation 0 % 0 %
Soft Rat Soft Tol
Make X, Y direction soft.
Make rotation hard.
- TCP setup
In application which should keep tool direction, TCP should be X, Y and Z =0 when softfloat starts.
By this, difference between soft direction and hard direction appears well.
Example)
1: UTOOL_NUM=9
2: SOFTFLOAT[10]
3: UTOOL_NUM=2
4: WAIT 10.00(sec)
5: SOFTFLOAT END
Tool frame whose X=0, Y=0, Z=0 and
W, P, R are the same as actual tool
TCP set as actual tool
Face matching application know-how
- Schedule setup
Example) In case pushing Z direction
X direction 0 % 0 %
Y direction 0 % 0 %
Z direction 0 % 70 % Limit force to avoid pushing with too large force.
X rotation 100 % 0 %
Y rotation 100 % 0 %
Z rotation 100 % 0 %
- TCP setup
Use the tool frame set as actual tool. You don’t have to change TCP when softfloat starts.
Select the tool as short as possible. X, Y and Z direction can’t become hard enough if tool is long.
Moment of the direction to match face is necessary. Select tool that can generate moment of the
direction to match face by pushing even with largest orientation mismatch.
Soft Rat Soft Tol
Make X, Y direction hard.
Make rotation soft.
3.5 CAUTIONS / RESTRICTIONS
When using the softfloat function, observe the following cautions / restrictions.
● Restrictions imposed when the softfloat function is enabled
- It is not guaranteed that the robot always follows the taught path.
- The taught route changes according to override.
- The required operation time may be prolonged compared with normal operation.
● The softfloat function is disabled automatically when:
- Program execution starts.
- Program execution ends.
- The program stops due to an alarm that turns off the servo.
- Jog feed is performed with the program at pause.
- The program is restarted after the cursor is moved manually with the program at pause.
- Backward execution is performed.
- Power is applied.
- 13 -
Page 40

3. SOFTFLOAT FUNCTION B-83284EN-2/05
● If the program is caused to pause, then restarted, the states of the softfloat function (such as
enabled/disabled and the softfloat start ratio) are set to the conditions which exist before the program is
caused to pause. However, the softfloat function is disabled if the operation listed above is done.
● The softfloat function cannot be enabled by any method other than the SOFTFLOAT instruction.
● When the softfloat function is enabled, the robot moves in the CNT 0 mode (no position check is
made) even if FINE has been specified as motion statement positioning mode.
● When the softfloat function is enabled, if an external force causes the robot to move beyond a certain
distance, the following servo alarms occur.
- If the robot is at rest :
[SRVO-023 Stop error excess(G:i A:j)]
- If the robot is operating :
[SRVO-024 Move error excess(G:i A:j)]
● If an attempt is made to enable the softfloat function with a brake applied, the brake is released
automatically before the function is enabled.
● When the softfloat function is enabled, brake control is ineffective.
● If the motion group mask in a program is [*,*,*,*,*,*,*,*] (there is no motion group), when the
program issues instructions with the softfloat function, the following alarm occurs:
[INTP-216 (program name, line number) Invalid value for group number]
● The range of motion with the softfloat function enabled should be minimized. A weight balance may
vary depending on the softfloat ratio and travel distance, thus shifting the vertical axis upward or
downward.
The range of motion with an auxiliary motion instruction issued should also be minimized for the same
reason. In addition, the speed of motion should be kept low.
● When the softfloat function is enabled, follow-up processing is normally performed for individual
motion instructions.
This processing is enabled or disabled according to system variable $SFLT_DISFUP.
$SFLT_DISFUP Default value: FALSE
- If FALSE, follow-up is performed at the start of each motion instruction in the program.
- If TRUE, follow-up is not performed for individual motion instructions in the program.
● This function cannot be used with arc tools.
● Force from outside should not be added when softfloat starts, when softfloat ends and when follow up
is doing.
If softfloat starts with not only gravity force but also other force from outside, robot will move above
or below, and “Stop/Move error excess” or “Softfloat time out” alarm will occur.
In such cases, please modify TP program by changing position data or by adding wait instruction as
softfloat starts and ends without other force.
NOTE
Follow-up
With the softfloat function, external forces are applied to the robot so that it
operates at positions slightly different from those specified. When the external
force is removed after the completion of the operation, the robot usually attempts
to move back to a specified point abruptly. Follow-up prevents this abrupt
movement.
- 14 -
Page 41

B-83284EN-2/05 4. CONTINUOUS ROTATION FUNCTION
4 CONTINUOUS ROTATION FUNCTION
The continuous rotation function allows continuous and limitless rotation about the final axis or an
additional rotation axis of the robot in one direction.
NOTE
For example, the ”final axis” refers to the J6 axis of a robot having six axes.
For example, this function is useful for rotating those devices that require continuous rotation, such as
conveyers, pumps, and grinders, about a robot axis or additional rotation axis.
To specify the items for this function, such as disable/enable, use the SETUP Continuous Turn screen. The
start and stop of continuous rotation are directed from a program.
Before this function can be used, the setup necessary for continuous rotation must be performed.
Only a single continuous rotation axis can be allocated for each operation group. The axis must satisfy the
following conditions:
● Final axis of the robot
● Final axis of the built-in additional rotation axes
● Any of the normal additional rotation axes
● Final axis of the independent additional axes
The continuous rotation axis must satisfy the following mechanical conditions:
● The mechanism must allow continuous operation (must be free of obstacles such as stoppers).
● The gear reduction ratio (value of Gear Ratio (motor) / Gear Ratio (axis) on the setting screen, the
speed of the motor required for one rotation about the axis) must be 4000 or less.
To use this function, an option (continuous rotation function) is required.
Function
When this function is enabled, the axis allocated as a continuous rotation axis allows limitless rotation. The
angle on the axis is, therefore, represented by a relative degree within +180°, not by an absolute one. For
example, the figure below shows rotation from 0° to 200° in the positive direction. The angle on the axis
after the rotation is -160°, not 200°.
0 deg
+200 deg
-160 deg
Fig. 4 (a) Angle on the Continuous Rotation Axis
When this function is enabled but continuous rotation is not performed (see the next page for an explanation
of how to use continuous rotation), rotation is performed about the continuous rotation axis from the current
angle to the target angle in whichever direction incurs the least amount of motion. (Usually, the direction of
rotation about the axis is determined with the relationship between the current and target angles.)
This ”shorter-way operation” is effective in reducing the cycle time.
- 15 -
Page 42

4. CONTINUOUS ROTATION FUNCTION B-83284EN-2/05
Current angle
Shorter way
Target angle
Target angle
Fig. 4 (b) Shorter-Way Operation
Setup
To use the function,
● Perform setup on the SETUP Continuous Turn screen, and
● Specify the start/stop of continuous rotation with the operation add instruction, ”continuous rotation
speed instruction”.
Procedure 4-1 Setting up the continuous rotation function
Step
1 Press [MENU] key. The screen menu will be displayed.
2 Select SETUP.
3 Press F1, [TYPE]. The screen switching menu will be displayed.
4 Select Cont Turn. The continuous rotation setup screen will be displayed.
SETUP Continuous Turn
1/4
1 Group: 1
2 Continuous Turn Axis Num : 0
3 Gear Ratio(motor) : 0
4 Gear Ratio(axis) : 0
[ TYPE ] DONE
5 Specify the necessary items using the numeric and other keys.
● To disable the continuous rotation function, set ”0” for Continuous Turn Axis Num.
● The maximum value for Gear Ratio (motor) and Gear Ratio (axis) is 2147483646.
● Set the operation group number for Group. If a different number (number of the operation group
to be viewed) is entered in this field, the other settings are changed to those of the operation
group.
6 After specifying the items, press F4, DONE.
7 Set up Constant Path function. For detail about simultaneous use of Continuous Rotation and Constant
Path function, please refer to next section “Use of Continuous Rotation function with Constant Path
function”.
● In case that Constant Path function is needed to be disabled by limitation (Example: Continuous
Rotation axis is set in final axis of robot), Constant Path function is disabled and message
“ConstPath is disabled.(Press ENTER)” is displayed.
● In case that the user can choose set Constant Path disabled or not (Example: Continuous Rotation
axis is set in independent axis), “Disable Constant Path Function?” is displayed.
● When F2, YES is pressed, Constant Path function is disabled and “ConstPath is
disabled.(Press ENTER)” is displayed.
- 16 -
Page 43

B-83284EN-2/05 4. CONTINUOUS ROTATION FUNCTION
● When F3, NO is pressed, setup of Constant Path function is NOT changed. If Constant Path
function is enabled, “ConstPath is enabled.(Press [ENTER] key)” is displayed. Else if
Constant Path function is disabled, “ConstPath is disabled.(Press [ENTER] key)” is
displayed.
8 If [ENTER] key is pressed, message “Cycle power to take effect (press [ENTER] key)” will be
displayed.
9 Turn off the power, then turn it back on with a cold start. (At first cycle power from Continuous
Rotation axis setup, cycle power will be done by cold start forcedly. Later second cycle power, cycle
power will be done by selected start mode.)
The items on the continuous rotation setup screen are described below.
Table 4 Contents of the Continuous Rotation Setup Screen
Item Description
Group Set the operation group number.
Continuous Turn Axis Num Set the number of the continuous rotation axis. If ”0” is set, this function is disabled for
the operation group.
Gear Ratio (motor)
Gear Ratio (axis)
Set the gear reduction ratio for the continuous rotation axis set for the above item. A
value from 0 to 2147483646 can be set for each item. The items must, however,
satisfy the following:
Gear Ratio (motor) ÷ Gear Ratio (axis) ≤ 4000
Use of Continuous Rotation function with Constant Path function
● Continuous rotation axis group cannot support Constant Path function.
● In case that Continuous Rotation axis is set in independent axis and group mask is separated from
non-Continuous Rotation group, Constant Path can support only non-Continuous Rotation groups.
● For example, following program can support simultaneous use of Continuous Rotation function with
Constant Path function.
[ Example ]
G1 : Robot, G2 : Servogun, G3 : Continuous Rotation axis (Independent axis with 1 axis)
•
- Program 1 : G1 + G2 ( Robot + Servogun ) --- < 1, 1, * >
- Program 2 : G3 ( Continuous Rotation axis ) only --- < *, *, 1 >
In Program1, Constant Path and Cycle Time Priority are active.
•
In Program2, Continuous Rotation can work in a program.
•
To combine Constant Path and Cycle Time Priority with continuous rotation, run Program2 in
•
Program1 concurrently.
● In multi-group program, if continuous rotation axis exists in any of the groups, alarm “CPMO-004
Feature not Supported (G:%d^2) ” will be posted at execution. To use continuous rotation in a
program, please separate groups which have Continuous Rotation axis from groups that DOES NOT
have Continuous Rotation axis. Or please disable Constant Path function.
● If Continuous Rotation axis is set in robot finale axis, Constant Path function is disabled forcedly.
● If Constant Path function setup is changed by Continuous Rotation setup, original Constant Path
function status is restored after Continuous Rotation setup is cleared.
Using the function
After setting up the continuous rotation axis, specify the start point of continuous rotation using the
operation add instruction, ”continuous rotation speed instruction”.
The following ”continuous rotation speed instruction” is supported. The ”continuous rotation speed
instruction” must be specified as an operation add instruction.
* The specification method is the same as that for other operation add instructions, and is therefore omitted.
(→ Subsection 5.3.4, ”Teaching an Additional Motion Instruction” in FANUC Robot series
R-30iB/R-30iB Mate CONTROLLER OPERATOR’S MANUAL (Basic Operation) (B-83284EN))
● Continuous rotation speed instruction CTV
- 17 -
Page 44

4. CONTINUOUS ROTATION FUNCTION B-83284EN-2/05
* where i = –100 to 100, which is the ratio of the rotation axis speed to the maximum axis speed (%)
Starting continuous rotation
Continuous rotation is started as soon as an operation statement with a continuous rotation speed instruction
added is started.
Stopping continuous rotation
Continuous rotation is stopped when the first operation statement with no continuous rotation speed
instruction added is started since a continuous rotation speed instruction was started.
When continuous rotation is stopped, the operation on the other axes for the same operation group also
terminates. The robot, therefore, decelerates even if the positioning format for the previous operation is
CNT.
The robot starts decelerating to stop on the continuous rotation axis after it has completely stopped on the
other axes. At this time, the robot is not necessarily at the specified position on the continuous operation
axis. Thus, the synchronization of the operation on the continuous rotation axis with the operation on the
other axes (including those for other operation groups) is lost.
If an operation statement is specified next, the robot rotates in the same direction as the previous continuous
rotation direction to move to the specified position.
Notes
● Continuous rotation continues even if logic instructions (instructions other than those in operation
statements) are executed.
● During program playback, the turn number for the continuous rotation axis is ignored, and is always
assumed to be ”0”.
● The turn number for the continuous rotation axis at a point specified when this function is enabled is
always stored as ”0”.
● If the rotation axis speed for a continuous rotation speed instruction is specified as ”0”, continuous
operation is not performed. If an operation statement is specified next, shorter-way operation is
performed on the continuous rotation axis. This feature is useful if continuous rotation about the
continuous rotation axis is to be stopped temporarily but temporary stop of the robot due to the end of
the continuous rotation is to be avoided. (See the next section, ”Example of use”.)
● In single-step execution (both forward and backward), continuous rotation is not performed even if a
continuous rotation speed instruction is added; shorter-way operation is performed.
● Continuous rotation stops due to a hold. If program execution is subsequently restarted, if the target
position has already been reached on axes other than the continuous rotation axis, continuous rotation
is not performed. If the target position has not been reached on axes other than the continuous rotation
axis, continuous rotation is restarted.
● Continuous rotation about the continuous rotation axis is possible from jog feed.
Example of use
The following shows an example of using the continuous rotation speed instruction.
● Description of lines 1 to 3:
During operation from P[1] to P[2], continuous operation is performed. Although the positioning
1:J P[1] 100% FINE
2:J P[2] 100% CNT100 CTV100
3:J P[3] 100% FINE
4:J P[4] 100% CNT100 CTV100
5:J P[5] 100% FINE CTV0
6:J P[6] 100% FINE
7:J P[7] 100% FINE CTV100
8:WAIT 100.0sec
9:J P[8] 100% FINE
format specified on line 2 is ”CNT”, the robot decelerates (stops temporarily on all axes at the start of
the operation on line 3) because a continuous rotation speed instruction is not added to the next line,
line 3.
- 18 -
Page 45

B-83284EN-2/05 4. CONTINUOUS ROTATION FUNCTION
● Description of lines 4 to 6:
Continuous rotation starts as soon as the execution of line 4 starts. Because the rotation axis speed
specified with the continuous rotation speed instruction on line 5 is 0, continuous rotation stops
temporarily at the start of the execution of line 5. Because continuous rotation continues, the
positioning format CNT100 on line 4 is valid and the robot does not decelerate.
When line 6 is executed, shorter-way operation is performed on the continuous rotation axis.
● Description of lines 7 to 9:
Continuous rotation starts at the start of operation on line 7. Continuous rotation continues during the
execution of the wait instruction (logic instruction) on line 8.
The robot stops temporarily on all axes at the start of operation on line 9, and continuous rotation
stops.
Notes/restrictions
Note the following when using this function:
● When continuous rotation is to be performed on a robot axis or built-in additional axis, The X and Y
components of the tool coordinate system must both be 0. (Only the Z-axis component can have a
value other than 0.)
If this condition is not satisfied, the path of linear or circular or circle arc motion cannot be guaranteed
in normal motion other than continuous rotation.
● This function cannot be used together with the following functions:
- Asynchronous addition axis speed instruction. (The synchronous additional axis speed
instruction can be used.)
- Arc sensor
- Weaving
- TCP speed estimation function (sealing flow rate control)
- Cannot use Incremental instruction (INC) for Continuous rotation axis. (Can use only for
non-continuous rotation axis or the continuous rotation axis is disabled case.)
● This function automatically updates the mastering data (for the continuous rotation axis only)
according to the amount of rotation about the continuous rotation axis. Thus, previously recorded
mastering data may not match the current mastering data.
After this function is disabled, it is not necessary to perform mastering.
● When this function is disabled, the current position on the continuous rotation axis may fall outside the
stroke limits. If this occurs, move the position on continuous rotation axis within the stroke limits
using jog feed or a program.
● If, on a multi-group system, the settings on the SETUP Continuous Turn screen are changed and the F4,
DONE key is pressed, it is necessary to set system variable
$PARAM_GROUP[group].$SV_OFF_ENB[i] (where i is an axis number) to FALSE to disable break
control for all the axes for all operation groups before turning the power back on with a cold start.
● On a multi-group system, even if there are multiple continuous rotation axes, separate continuous
rotation speeds cannot be specified for them.
● At the end of continuous rotation, one or more rotations about the continuous rotation may be
performed to ensure smooth deceleration and stop. (The amount of rotation differs depending on the
acceleration/deceleration constant.)
● Even during backward execution (single-step execution), shorter-way operation is performed on the
continuous rotation axis. If, therefore, forward step execution and backward execution are performed
sequentially in an operation statement with the movement angle being very close to 180o, rotation may
be performed about the continuous rotation axis in the same direction during the forward and
backward executions.
● Original Path Resume feature is disabled when continuous turn loaded. Even if system variable
($SCR.$ORG_PTH_RSM) set enabled, feature is disabled when cycle power.
● Groups which have Continuous Rotation axis will disable Cycle Time Priority feature for Cartesian
motion. This will be longer cycle time and path change. When setup of Continuous Rotation axis is
cleared, Cycle Time Priority feature for Cartesian motion will be restored original state. Please execute
program carefully after changing of Continuous Rotation axis setup.
- 19 -
Page 46

5. OPERATION GROUP DO OUTPUT FUNCTION B-83284EN-2/05
5 OPERATION GROUP DO OUTPUT
FUNCTION
The operation group DO output function outputs information about the operation groups that are capable of
jog feed, and about the operation groups of the programs being executed/temporarily stopped, to an external
device with a digital output signal (DO) or robot output signal (RO). This allows devices other than the
teach pendant to recognize the currently effective operation groups, thus improving safety. This function is
effective when the multi-group option is used.
Function
This function allows the allocation of two DOs (jog signal and program signal) to a single operation group.
For DOs, any digital output signals or robot output signals of the robot can be used.
Each allocated DO signal turns on/off under the following conditions:
- Jog signals
When the teach pendant is disabled, all signals turn off.
When the teach pendant is enabled, the signal for the currently selected operation group on the teach
pendant turns on, while the other signals turn off.
- Program signals
Regardless of whether the teach pendant is enabled or disabled, the signal for the operation group of
the program currently being executed/temporarily stopped turns on. (The signal does not turn on when
the program is merely selected.)
If other programs are being executed/temporarily stopped with the multitask option, the signals for the
operation groups of these programs also turn on.
Setup
To set up the operation group DO output function, use the [SETUP Motion DO] screen.
To change the signal number for an operation group, move the cursor to the signal number and enter a new
value.
Motion group DO
1/3
Group No. PROGRAM JOG
1 RO[ 1] RO[ 2]
2 DO[ 3] DO[ 3]
3 RO[ 0] RO[ 0]
[ TYPE ] RO DO
To change the type of a signal, position the cursor to the type of a signal and press function key F4, RO or
F5, DO.
To disable a signal, set the number of the signal to 0.
The same signal can be set for both the program and jog signals for the same operation group. In this case,
the output signal is the OR of the two signals. That is, the signal turns on if either the program or jog signal
turns on. (The signal turns off only if both the program and jog signals turn off.)
- 20 -
Page 47

B-83284EN-2/05 5. OPERATION GROUP DO OUTPUT FUNCTION
Example of using this function with the multitask option
This section explains the operation of this function when a subprogram call or the multitask option is used.
The output program signal is the OR of the signals for all the operation groups of the program currently
being executed or temporarily stopped.
If a program without an operation group calls a program having an operation group by using a subprogram
call, the signal for the operation group of the subprogram turns on only while the subprogram is being
executed. (The signal does not turn on when the main program without an operation group is merely
selected/executed.)
If the execution instruction of the multitask function is to start another program that operates the robot (the
main program that has the execution instruction does not have an operation group), the signal for the
operation group of the program started by the execution instruction does not turn on when the main program
is merely selected/executed. The program signal turns on when the program that operates the robot is
actually started.
Consider the following three example programs:
PROGRAM MAIN : Operation group[*,*,*,*,*,*,*,*]
1:RUN PRG A
2:RUN PRG B
:
PROGRAM PRG A : Operation group[1,*,*,*,*,*,*,*]
1:J P[1] 100% FINE
:
PROGRAM PRG B : Operation group[*,1,*,*,*,*,*,*]
1:L P[1] 500mm/sec CNT100
:
Program MAIN, which does not have an operation group, starts PRG A and PRG B having operation groups
by using execution instructions. PRG A uses operation group 1 and PRG B uses operation group 2.
● The program signals for the groups do not turn on when program MAIN is merely selected.
● When line 1 of MAIN is executed, PRG A is started and the signal for operation group 1 turns on.
● When line 2 of MAIN is executed, PRG B is started and the signal for operation group 2 turns on.
● When PRG A and PRG B terminates, the respective signals for operation groups 1 and 2 turn off.
Notes
Note the following when using this function:
● The same signal cannot be defined for different operation groups.
● While a program is being executed/temporarily stopped, the type (DO or RO) and number of the
program signal cannot be changed.
- 21 -
Page 48

6. AUTOMATIC ERROR RECOVERY FUNCTION B-83284EN-2/05
6 AUTOMATIC ERROR RECOVERY
FUNCTION
To use this function, automatic error recovery function option (A05B-2xxx-J924) is required.
6.1 AUTOMATIC ERROR RECOVERY FUNCTION
Robots are sometimes stopped by various alarms even during production. If a robot is stopped, it is
necessary to perform recovery operation then resume the program that was originally running. For example,
suppose that a robot is performing arc welding. An alarm due to an arc start failure may be issued, stopping
the robot. In such a case, the operator must jog the robot to a safe position to, for example, cut the end of the
wire or clean the nozzle, then resume the original program.
The automatic error recovery function is provided to support automatic operation of the above sequence.
The automatic error recovery function consists of the following two functions.
• Resume program function
• Fast exit/entry feature
6.2 RESUME PROGRAM FUNCTION
This function is a function to remove the cause of the alarm by using the resume program when the robot is
stopped by the alarm when being producing, and to resume the original program.
Robot
1
2 3
2-3: Welding path
×: Position where arc start failed
WELD.TP: Original program
WIRE_CUT.TP: Resume program
In the example shown above, the robot is operated by executing WELD.TP to perform welding along the
path from 2 to 3.
Assume that an arc start failure occurs at the arc start position 2. At this time, if the resume program function
is used, another program called the resume program, which is WIRE_CUT.TP in this case, can be started at
the next start signal input. After this program terminates, another start signal input resumes the original
program. If the resume operation function is then enabled (which is set on the welding system setting
screen), the robot automatically returns to the original position where the robot was stopped, then the
original program is resumed. If the return distance for resume operation is set, the robot returns from the
stop position by the set distance, then the original program is resumed. If no arc is produced, a scratch start
takes place.
WELD.TP
Work
Fig.6.2 Resume program function
WIRE_CUT.TP
4
Wire cutting
- 22 -
Page 49

B-83284EN-2/05 6. AUTOMATIC ERROR RECOVERY FUNCTION
6.3 FAST EXIT/ENTRY FEATURE
If an alarm is issued during operation in a complicated environment, the robot moves from the stopped
position to the taught point to execute the resume program. In this case, the robot may interfere with part of
a workpiece or peripheral devices. After recovery operation, similar interference may occur when an
attempt is made to execute the original program. The fast exit/entry feature is provided to avoid the
possibility of such interference.
WIRE_CUT.TP
Robot
1
2 3
2-3: Welding path
×: Position where alarm is issued
WELD.TP: Original program
WIRE_CUT.TP: Maintenance program
WELD.TP
4
Work
Fig.6.3 Fast exit/entry feature
Wire cutting
In the example shown above, the robot is operated by executing WELD.TP to perform welding along the
path from 2 to 3. At this time, when the alarm of something is issued between positions 2-3 and the robot
stops, the fast exit/entry feature automatically does the following operation.
1 From the stopped position, disable arc welding, and execute only the move statements of the original
program up to the end.
2 Execute a maintenance program, which is WIRE_CUT.TP in this case.
3 Disable arc welding, execute the move statements of the original program from the beginning to move
the robot to the stopped position.
4 Enable arc welding, and resume the original program operation.
Thereafter, in this manual, above-mentioned operation 1-4 is called FFR sequence (Fast Fault Recovery
sequence).
6.4 RESUME_PROG INSTRUCTION
The resume program function executes a resume program defined in an original program, in lieu of the
original program. The resume program instructions to define the resume program are the following five
instructions. RESUME_PROG[1] can be used in single-task/multi-task, and RESUME_PROG[2-5] can be
used in the multi-task.
• RESUME_PROG[1:Comment] : For Single-task/Multi-task
• RESUME_PROG[2:Comment] : For Multi-task
• RESUME_PROG[3:Comment] : For Multi-task
• RESUME_PROG[4:Comment] : For Multi-task
• RESUME_PROG[5:Comment] : For Multi-task
To erase the defined resume program, use the following instruction.
• CLEAR_RESUME_PROG
- 23 -
Page 50

6. AUTOMATIC ERROR RECOVERY FUNCTION B-83284EN-2/05
To teach the resume instructions, press F1, [INST] to display the related menu, then select “Program
control” from the menu.
Instruction 1
1 Registers
2 I/O
3 IF/SELECT
4 WAIT
5 JMP/LBL
6 CALL
7 Miscellaneous
8 --next page--
Instruction 2
1 Skip
2 Payload
3 Offset/Frames
4 Multiple control
5 Program control
6 MACRO
7 FOR/ENDFOR
8 --next page--
Instruction 3
1 Tool_Offset
2 LOCK PREG
3 MONITOR/MON. END
4 String
5
6
7
8 --next page--
RESUME_PROG[1:Comment]
The program name defined by RESUME_PROG[1:Comment] is registered as a resume program when
RESUME_PROG[1:Comment] is executed in original program, and when the alarm is issued while
defining the resume program, the resume program is executed.
RESUME_PROG[1:Comment] = WIRE_CUT
Resume program name
Resume program comment
Instruction number
To use the resume program instructions, the following option is needed.
• To use the RESUME_PROG[1-5], the Automatic error recovery function (A05B-2600-J924) is
needed.
• In addition, to use the RESUME_PROG[2-5], the following options are needed.
RESUME_PROG[2]
Dual Arm Control A05B – 2600 – J605
RESUME_PROG[2-5]
Multi UOP interface function A05B – 2600 – J964
When the instruction number of RESUME_PROG[ ] is defined, it is necessary to accord the following
conditions.
TP Program that can be started by
START#1/PROD_STAR#1 of UOP
TP Program that can be started by
START#2/PROD_STAR#2 of UOP
TP Program that can be started by
START#3/PROD_STAR#3 of UOP
TP Program that can be started by
START#4/PROD_STAR#4 of UOP
TP Program that can be started by
START#5/PROD_STAR#5 of UOP
RESUME_PROG[1:Comment]
RESUME_PROG[2:Comment]
RESUME_PROG[3:Comment]
RESUME_PROG[4:Comment]
RESUME_PROG[5:Comment]
For instance, in multi-task, the RESUME_PROG[3:Comment] can be used only by the program that can be
started by START#3/ PROD_STAR#3 of UOP.
The RESUME_PROG[2-5] cannot be used in the single-task because it is for multi-task. Therefore, use the
RESUME_PROG[1:Comment] in the single-task.
- 24 -
Page 51

B-83284EN-2/05 6. AUTOMATIC ERROR RECOVERY FUNCTION
T
To define the resume program instructions, there are the following conditions.
• Multiple resume program instructions cannot be defined in the original program.
• The resume program instructions cannot be defined in the resume/maintenance program.
• A resume program instruction the same instruction number cannot be executed by the plural. For
instance, the RESUME_PROG[5] cannot be executed by other programs while the resume program is
already being defined by the RESUME_PROG[5]. However, the RESUME_PROG[1-4] can be
executed by other programs.
• The resume program instructions cannot be defined in the programs executed by the RUN instruction.
CLEAR_RESUME_PROG
When the CLEAR_RESUME_PROG is executed, the resume program defined by RESUME_PROG[ ] is
erased. Therefore, even if the alarm is issued after the CLEAR_RESUME_PROG is executed, the resume
program is not executed. Moreover, the CLEAR_RESUME_PROG is effective only in the program in
which the CLEAR_RESUME_PROG is defined. For instance, in multi task, when the
CLEAR_RESUME_PROG is executed in the program in which the RESUME_PROG[1] is defined, only
the resume program defined by the RESUME_PROG[1] is erased. At this time, the resume program defined
by the RESUME_PROG[2-5] is never erased.
The resume program is erased also when:
• Backward execution is performed in original program.
• The cursor line is changed manually in original program.
• The original program terminates.
CAUTION
When the resume program is erased while the resume program is pausing, the
resume program cannot be restarted. The original program restarts from the
pause position of the resume program.
The following programs are examples that use the RESUME_PROG[2] and the
CLEAR_RESUME_PROG.
WELD.TP
Motion group: [*,1,*,*,*,*,*,*]
WELD
1/7
1: J P[1] 40% FINE
2: RESUME_PROG[2:WIRE CUT]=WIRE_CUT
3: L P[2] 300mm/sec FINE
: Arc Start[2]
4: L P[3] 50mm/sec FINE
: Arc End[2]
5: CLEAR_RESUME_PROG
6: J P[4] 40% FINE
[End]
POINT
OUCHUP
>
- 25 -
Page 52

6. AUTOMATIC ERROR RECOVERY FUNCTION B-83284EN-2/05
T
WIRE_CUT.TP
Motion group: [*,1,*,*,*,*,*,*]
WIRE_CUT
1/8
1: L P[1] 50mm/sec FINE
2: J P[2] 50% FINE
3: WO[4]=PULSE, 0.5sec
4: L P[3] 20mm/sec FINE
5: L P[4] 50mm/sec FINE
6: WAIT 0.8sec
7: J P[5] 50% FINE
[End]
POINT
OUCHUP
Wire feed
Wire cut
>
In the above program example, the WIRE_CUT.TP is taught in the second line of the WELD.TP and is
erased in the fifth line. Since the WIRE_CUT.TP is defined as the resume program between the third to
fourth lines, it is executed as the resume program. In the sixth and subsequent lines, the resume program has
been erased, so the resume program is not executed.
6.5 RETURN_PATH_DSBL INSTRUCTION
In arc tool systems, the resume operation function is generally enabled. With this function enabled, return to
the original stop position is always performed then arc is produced when the original program resumes after
the resume program terminates. In some systems, however, return to the original stop position should not
sometimes be performed. For example, when the nozzle touch state is input through DI, a resume program
is used to relieve the torch slightly in the torch direction. If the resume operation function operates, return to
the original stop position is performed even when relieve operation has been performed. As a result, the
nozzle touch state is observed again. In such a case, the resume operation function needs to be kept enabled,
but it should be disabled only after the execution of the resume program.
This can be performed with the RETURN_PATH_DSBL instruction. By using this instruction within the
resume program, the resume operation function can be disabled only when the original program is resumed
next. This instruction is valid only when it is executed within a resume program; the instruction is invalid
when executed in a program other than the resume program.
The RETURN_PATH_DSBL instruction appears in the menu containing the RESUME_PROG[]
instruction.
Instruction 1
1 Registers
2 I/O
3 IF/SELECT
4 WAIT
5 JMP/LBL
6 CALL
7 Miscellaneous
8 --next page--
RETURN_PATH_DSBL
The RETURN_PATH_DSBL is effective only in the resume program in which the
RETURN_PATH_DSBL is defined. For instance, in multi task, when RETURN_PATH_DSBL is executed
in the resume program defined by RESUME_PROG[1], only the resume operation function of the original
program in which RESUME_PROG[1] is defined becomes invalid. The resume operation function of the
original program in which other RESUME_PROG[2-5] is defined is effective.
The following programs are examples that use the RETURN_PATH_DSBL. The RETURN_PATH_DSBL
instruction is valid only when it is taught within resume program. Use this instruction as shown in the
sample program given below. If the instruction is taught as shown below, the resume operation function
Instruction 2
1 Skip
2 Payload
3 Offset/Frames
4 Multiple control
5 Program control
6 MACRO
7 FOR/ENDFOR
8 --next page--
Instruction 3
1 Tool_Offset
2 LOCK PREG
3 MONITOR/MON. END
4 String
5
6
7
8 --next page--
- 26 -
Page 53

B-83284EN-2/05 6. AUTOMATIC ERROR RECOVERY FUNCTION
T
T
does not operate when the original program resumes after the resume program terminates, even if the
resume operation function is enabled.
WELD.TP
Motion group: [*,1,*,*,*,*,*,*]
WELD
1/7
1: J P[1] 40% FINE
2: RESUME_PROG[2:WIRE CUT]=WIRE_CUT
3: L P[2] 300mm/sec FINE
: Arc Start[2]
4: L P[3] 50mm/sec FINE
: Arc End[2]
5: CLEAR_RESUME_PROG
6: J P[4] 40% FINE
[End]
POINT
OUCHUP
>
WIRE_CUT.TP
Motion group: [*,1,*,*,*,*,*,*]
WIRE_CUT
1/9
1: L P[1] 50mm/sec FINE
2: J P[2] 50% FINE
3: WO[4]=PULSE, 0.5sec
4: L P[3] 20mm/sec FINE
5: L P[4] 50mm/sec FINE
6: WAIT 0.8sec
7: J P[5] 50% FINE
8: RESUME_PATH_DSBL
[End]
POINT
OUCHUP
Wire feed
Wire cut
>
6.6 MAINT_PROG INSTRUCTION
The fast exit/entry feature automatically does the following operation.
1 From the stopped position, disable arc welding, and execute only the move statements of the original
program up to the end.
2 Execute a maintenance program.
3 Disable arc welding, execute the move statements of the original program from the beginning to move
the robot to the stopped position.
4 Enable arc welding, and resume the original program operation.
Thereafter, in this manual, above-mentioned operation 1-4 is called FFR sequence (Fast Fault Recovery
sequence).
The maintenance program instructions to define the maintenance program are the following five
instructions. MAINT_PROG[1] can be used in single-task/multi-task, and MAINT_PROG[2-5] can be
used in the multi-task.
• MAINT_PROG[1:Comment] : For Single-task/Multi-task
• MAINT_PROG[2:Comment] : For Multi-task
• MAINT_PROG[3:Comment] : For Multi-task
• MAINT_PROG[4:Comment] : For Multi-task
• MAINT_PROG[5:Comment] : For Multi-task
The MAINT_PROG[ ] instruction appears in the menu containing the RESUME_PROG[ ] instruction.
- 27 -
Page 54

6. AUTOMATIC ERROR RECOVERY FUNCTION B-83284EN-2/05
Instruction 1
1 Registers
2 I/O
3 IF/SELECT
4 WAIT
5 JMP/LBL
6 CALL
7 Miscellaneous
8 --next page--
Instruction 2
1 Skip
2 Payload
3 Offset/Frames
4 Multiple control
5 Program control
6 MACRO
7 FOR/ENDFOR
8 --next page--
Instruction 3
1 Tool_Offset
2 LOCK PREG
3 MONITOR/MON. END
4 String
5
6
7
8 --next page--
MAINT_PROG[1:Comment]
MAINT_PROG [1:Comment] = WIRE_CUT
Maintenance program name
Maintenance program comment
Instruction number
The program name defined by MAINT_PROG[1:Comment] is registered as a maintenance program when
MAINT_PROG[1:Comment] is executed in original program, and when the alarm is issued while defining
the maintenance program, the FFR sequence is executed.
To use the maintenance program instructions, the following option is needed.
• To use the MAINT_PROG[1-5], the Automatic error recovery function (A05B-2600-J924) is needed.
• In addition, to use the MAINT_PROG[2-5], the following options are needed.
MAINT_PROG[2]
Dual Arm Control A05B – 2600 – J605
MAINT_PROG[2-5]
Multi UOP interface function A05B – 2600 – J964
When the instruction number of MAINT_PROG[ ] is defined, it is necessary to accord the following
conditions.
TP Program that can be started by START#1/PROD_STAR#1 of UOP MAINT_PROG[1:Comment]
TP Program that can be started by START#2/PROD_STAR#2 of UOP MAINT_PROG[2:Comment]
TP Program that can be started by START#3/PROD_STAR#3 of UOP MAINT_PROG[3:Comment]
TP Program that can be started by START#4/PROD_STAR#4 of UOP MAINT_PROG[4:Comment]
TP Program that can be started by START#5/PROD_STAR#5 of UOP MAINT_PROG[5:Comment]
For instance, in multi-task, the MAINT_PROG[3:Comment] can be used only by the program that can be
started by START#3/ PROD_STAR#3 of UOP.
The MAINT_PROG[2-5] cannot be used in the single-task because it is for multi-task. Therefore, use the
MAINT_PROG[1:Comment] in the single-task.
When the FFR sequence is completed, the following messages are displayed on the teach pendant.
MOTN-431 Fast fault recovery 1 When the FFR sequence executed by the MAINT_PROG[1]
is completed.
MOTN -432 Fast fault recovery 2 When the FFR sequence executed by the MAINT_PROG[2]
is completed.
- 28 -
Page 55

B-83284EN-2/05 6. AUTOMATIC ERROR RECOVERY FUNCTION
T
T
MOTN -433 Fast fault recovery 3 When the FFR sequence executed by the MAINT_PROG[3]
is completed.
MOTN -434 Fast fault recovery 4 When the FFR sequence executed by the MAINT_PROG[4]
is completed.
MOTN -435 Fast fault recovery 5 When the FFR sequence executed by the MAINT_PROG[5]
is completed.
To define the maintenance program instructions, there are the following conditions.
• Multiple maintenance program instructions cannot be defined in the original program.
• The maintenance program instructions cannot be defined in the resume/maintenance program.
• A maintenance program instruction the same instruction number cannot be executed by the plural. For
instance, the MAINT_PROG[5] cannot be executed by other Programs while the maintenance
program is already being defined by the MAINT_PROG[5]. However, the MAINT_PROG[1-4] can
be executed by other Programs.
• The maintenance program instructions cannot be defined in the programs executed by the RUN
instruction.
The maintenance program is erased also when:
• Backward execution is performed in original program or maintenance program.
• The cursor line is changed manually in original program or maintenance program.
• The original program or the maintenance program terminates.
CAUTION
When the definition of the maintenance program is deleted while executing the
FFR sequence, the maintenance program or the original program cannot be
restarted by the FFR sequence.
The following programs are examples that use the MAINT_PROG[2].
WELD.TP
Motion group: [*,1,*,*,*,*,*,*]
WELD
1/6
1: J P[1] 40% FINE
2: MAINT_PROG[2:WIRE CUT]=WIRE_CUT
3: L P[2] 300mm/sec FINE
: Arc Start[2]
4: L P[3] 50mm/sec FINE
: Arc End[2]
5: J P[4] 40% FINE
[End]
POINT
OUCHUP
WIRE_CUT.TP
Motion group: [*,1,*,*,*,*,*,*]
WIRE_CUT
1/8
1: L P[1] 50mm/sec FINE
2: J P[2] 50% FINE
3: WO[4]=PULSE, 0.5sec
4: L P[3] 20mm/sec FINE
5: L P[4] 50mm/sec FINE
6: WAIT 0.8sec
7: J P[5] 50% FINE
[End]
POINT
OUCHUP
>
Wire feed
Wire cut
>
- 29 -
Page 56

6. AUTOMATIC ERROR RECOVERY FUNCTION B-83284EN-2/05
In the above program example, the WIRE_CUT.TP is taught in the second line of the WELD.TP. Since the
WIRE_CUT.TP is defined as the maintenance program between the third to final lines, it is executed as the
maintenance program. And when the execution of the WELD.TP ends, the definition of the maintenance
program is automatically deleted.
6.7 SETTING OF THE AUTOMATIC ERROR RECOVERY
FUNCTION
On the setting screen of the automatic error recovery function, the following settings can be made:
• Instruction number : Selecting the instruction number
Error recovery function common setup
• Error Recovery Function : Enabling/disabling the automatic error recovery function
• Approval DI Index No.* : Defining the recovery switch DI
• Incomplete End DO Index No.* : Defining the incomplete end DO
• Reset DI Index No.* : Defining the incomplete-end reset DI
• Automatic Start Feature : Enabling/disabling the alarm-time automatic start feature
• Alarm setting screen : Enabling/disabling the alarm code monitoring function
• DI_alarm setting screen : Defining the automatic error recovery alarm conditions
Resume program type recovery
• RESUME comment : Defining the resume program comment
• Status DO Index No.* : Defining the resume program information DO
• Auto Start Max Count : Setting the maximum number of automatic start repetitions
• Auto Start Max Count R[ ] : Setting the automatic start count register
Maintenance program type recovery
• MAINT comment : Defining the maintenance program comment
• Fast Exit/Entry Feature : Enabling/disabling the fast exit/entry feature
• Dry Run Exit/Entry : Enabling/disabling dry run exit/entry operation
• MAINT DO Index No.* : Defining the FFR sequence information DO
(* Set this to zero if you do not want to use this feature.)
To display the setting screen of the automatic error recovery function, first press [MENU] key to display the
screen menu, then select ”6 SETUP”. Then, press F1, [TYPE] to display the screen switching menu, then
select Err recovery.
[MENU] → 6 SETUP → Err recovery
- 30 -
Page 57

B-83284EN-2/05 6. AUTOMATIC ERROR RECOVERY FUNCTION
Error Recovery Set
1/14
1 Instruction number: 1
Error recovery function common setup
2 Error recovery function: DISABLED
3 Approval DI index No.: 0
4 Incomplete end DO index No.: 0
5 Reset DI index No.: 0
6 Automatic start (global): DISABLED
RESUME PROGRAM type recovery
7 RESUME comment[********************]
8 Status DO index No.: 0
9 Auto start Max count: 2
10 Auto start count R[] No.: 0
MAINTENANCE PROGRAM type recovery
11 MAINT comment [********************]
12 Fast exit/entry feature: DISABLED
13 Dry run exit/entry: DISABLED
14 MAINT DO index No.: 0
[ TYPE ] ALARMDIALARM
To DI_alarm setting screenTo alarm setting screen
Selecting the instruction number
This screen can be displayed by each instruction number of the resume program instruction and the
maintenance program instruction. It is possible to switch to a setup screen of other instruction numbers by
changing this item.
For multi-task
For instance, instruction number 1-3 can be selected by this item in the system
that can use RESUME_PROG[1-3] and MAINT_PROG[1-3].
Error recovery function common setup
Enabling/disabling the automatic error recovery function
This item enables or disables the automatic error recovery function. When the automatic error recovery
function is enabled, and neither monitored alarm codes nor the recovery switch DI are defined, the resume
program is always executed at restart from the suspended state (except when the resume program
information DO is off). And, when the automatic error recovery function and the fast exit/entry feature are
enabled, and neither monitored alarm codes nor the recovery switch DI are defined, the FFR sequence is
always executed at restart from the suspended state(except when the FFR sequence information DO is off).
When this item is disabled, the resume program and the FFR sequence is not executed.
For multi-task
This item can be set by each instruction number.
Defining the recovery switch DI
To use the recovery switch DI function, define a DI number. After the number is defined, power must be
turned off then back on.
With this function, the operator can choose whether to execute the resume program or the FFR sequence or
not at the time of restart from the suspended state by using a peripheral device. When DI is OFF, neither the
resume program nor the FFR sequence are executed. If this signal number is not defined, this function is
disabled.
- 31 -
Page 58

6. AUTOMATIC ERROR RECOVERY FUNCTION B-83284EN-2/05
The specifications of the recovery switch DI function are listed below.
Table 6.7 (a) Specifications of the recovery switch DI function
DI number definition
0 Disabled Executed
Recovery switch DI
function status
Enabled
DI status
On Executed Valid number defined
Off Not executed
Execution of resume program or FFR
sequence at restart
CAUTION
To continue a resume program at program restart after the resume program is
suspended, input the on state of the recovery switch DI. If it is off, the original
program is executed.
For multi-task
This item can be set by each instruction number.
Defining the incomplete end DO
When an incomplete end DO number is defined, the incomplete end DO is output if a certain forced
termination alarm is issued during execution of the resume program or the maintenance program. The
output incomplete end DO is turned off by the next start signal input.
Before inputting the start signal, the operator must check the incomplete end DO signal status. If this signal
is on, the resume program or the maintenance program terminates in the middle, so the robot is not in a
specified position.
CAUTION
When the resume program or the maintenance program terminates in the middle,
and the start signal is input, the robot might do action not predictable. Therefore,
before inputting the start signal, check the program name and the program start
line that will be executed with the next start signal. And, if an interfering object
exists, jog the robot to a position where interfering object doesn't exist, then input
the start signal.
This signal may be added to the PLC start signal acceptance conditions.
If this signal is set to 0, this function is disabled.
For multi-task
This item can be set by each instruction number.
Start signal
Resume program terminated midway
Execution of
resume program
Incomplete end DO
Fig. 6.7 (a) Incomplete end DO output timing chart
Defining the incomplete-end reset DI
When the incomplete end DO is included in the PLC start signal acceptance conditions, the operator
requires a means to turn off the incomplete end DO externally. Inputting the incomplete-end reset DI signal
- 32 -
Page 59

B-83284EN-2/05 6. AUTOMATIC ERROR RECOVERY FUNCTION
turns off the incomplete end DO. When the incomplete end DO is output, the operator must first check the
program name and the program start line that will be executed with the next start signal. And, if an
interfering object exists, jog the robot to a position where interfering object doesn't exist, input the
incomplete-end reset DI, then input the start signal.
If this signal is set to 0, this function is disabled.
For multi-task
This item can be set by each instruction number.
Enabling/disabling the alarm-time automatic start feature
When this item is enabled, and an alarm defined in the monitored alarm codes is issued, the resume program
or the FFR sequence are automatically executed without outputting the alarm signal and stopping the robot.
When the resume program has terminated, the original program is resumed automatically by this function
(In the fast exit/entry feature, when the maintenance program has terminated, the original program is
resumed automatically by FFR sequence.). During then, the operator need not input the start signal.
Because the alarm signal is not output, other robots are not stopped when multiple robots are operating. The
robot for which the alarm was issued moves by itself to the recovery station, and after recovery work, the
original program is resumed.
When this item is disabled, and an alarm defined in the monitored alarm codes is issued, the program
outputs an alarm signal and stops running. Input of the start signal executes the defined resume program or
FFR sequence. In the resume program function, after the resume program terminates, another start signal
input restarts the suspended original program. Another start signal to resume an original program need not
be input for the fast exit/entry feature. The original program is resumed automatically by FFR sequence.
For multi-task
- This item cannot be set by each instruction number. When this item is enabled in
either of instruction number, this function of all the instruction numbers are
automatically enabled.
- Even if this function is enabled, this function is not executed when the alarm
defined in the monitored alarm codes is issued while the alarm is being issued in
other robots. In that case, the program outputs an alarm signal and stops running.
Input of the start signal executes the defined resume program or FFR sequence.
Enabling/disabling the alarm code monitoring function
When this function is enabled, and only when an alarm defined in the monitored alarm codes is issued, the
resume program or the FFR sequence is executed. When the monitored alarm code is defined, and the
resume program or the maintenance program is defined, this function is enabled automatically. If no alarm
code is defined, this function is disabled. In this case, before the suspended original program is resumed, the
resume program or the FFR sequence is always executed (except when the recovery switch DI function is
enabled).
To define alarm codes to be monitored, press the F2, ALARM key. A screen for defining alarm codes is
displayed.
- 33 -
Page 60
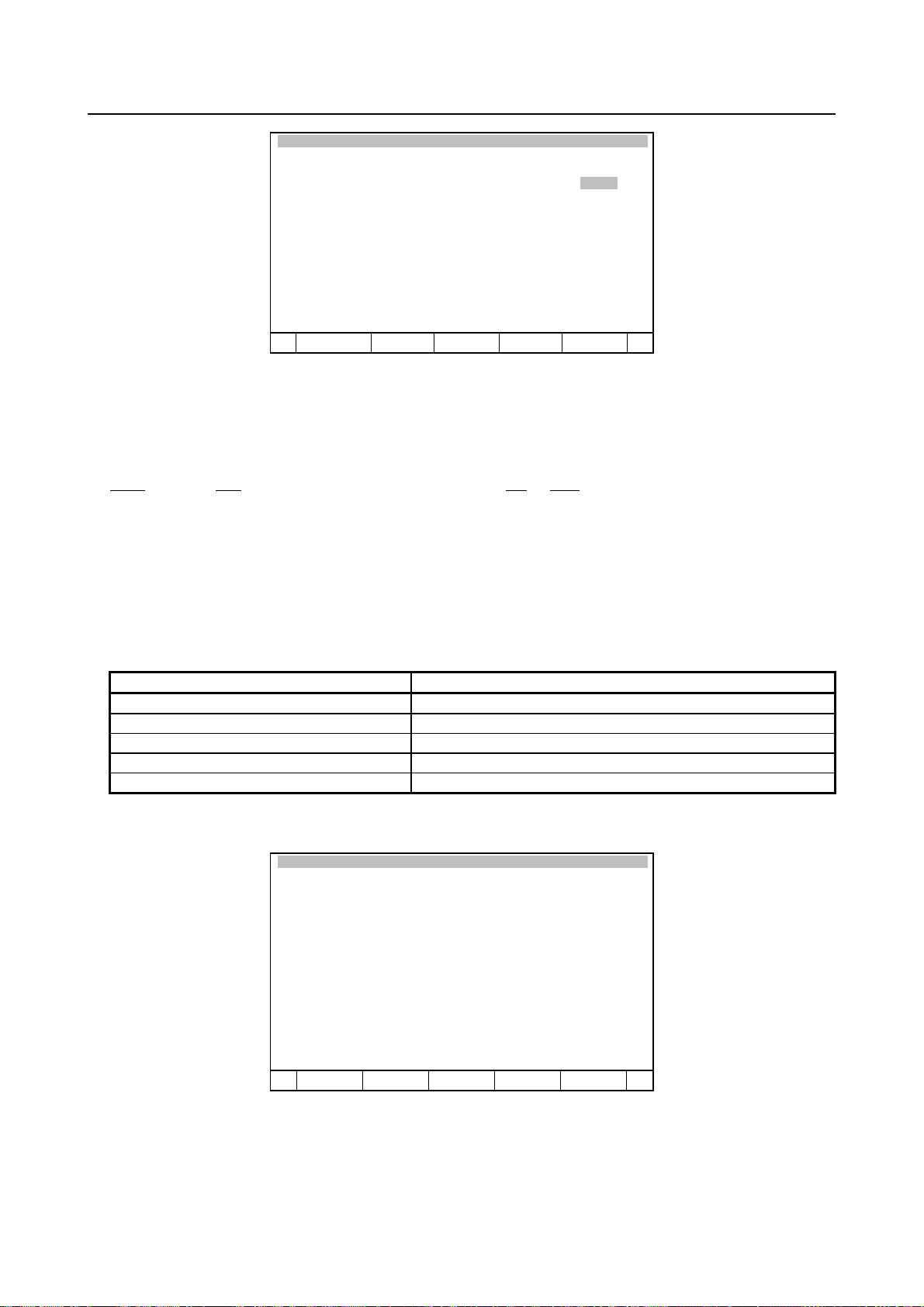
6. AUTOMATIC ERROR RECOVERY FUNCTION B-83284EN-2/05
D
H
Error Recovery Setup:1
1/10
1 Monitored alarm code 53013
2 Monitored alarm code 53018
3 Monitored alarm code 12278
4 Monitored alarm code 0
5 Monitored alarm code 0
6 Monitored alarm code 0
7 Monitored alarm code 0
8 Monitored alarm code 0
9 Monitored alarm code 0
10 Monitored alarm code 0
[ TYPE ]
When a defined alarm code is issued, and a program is suspended, the resume program or FFR sequence are
executed at restart.
Each alarm code consists of an alarm code ID and alarm number. The alarm code ID indicates the type of
alarm. For an arc start failure alarm, for example, the following alarm code is indicated:
– 013 Arc Start failed = 53 013
ARC
ID (53) Number ID Number
For alarm numbers, refer to FANUC Robot series R-30iB/R-30iB Mate CONTROLLER OPERATOR’S
MANUAL (Alarm Code List) (B-83284EN-1).
Up to ten alarm codes can be defined as standard. To change the maximum number of alarm codes (up to 20
codes) that can be defined, change system variable $RSMPRG_SV.$NUM_ALARM, cycle power off the
controller.
Instruction number System variable
1 $RSMPRG_SV.$NUM_ALARM
2 $RSMPRG_SV2.$NUM_ALARM
3 $RSMPRG_SV3.$NUM_ALARM
4 $RSMPRG_SV4.$NUM_ALARM
5 $RSMPRG_SV5.$NUM_ALARM
Pressing the F5, HELP key displays the following screen:
Error Recovery Setup:1
HELP Arrows to scroll, PREV to exit
Typical alarm code IDs are specified as
follows.
PROG : 3, SRVO : 11, INTP : 12
PRIO : 13, MOTN : 15, SPOT : 23
SYST : 24, PALT : 26, LASR : 50
SEAL : 51, ARC : 53, MACR : 57
SENS : 58, COMP : 59
If the following conditions are met, the alarm code monitoring function is disabled:
• The recovery switch DI is off.
• There is no alarm code defined.
• The resume program or the maintenance program is not defined in the program currently being
executed.
ONE
ELP
- 34 -
Page 61

B-83284EN-2/05 6. AUTOMATIC ERROR RECOVERY FUNCTION
prog
prog
prog
• The resume program or the FFR sequence is executing.
The specifications of the alarm code monitoring function are listed below.
Table 6.7 (b) Specifications of the alarm code monitoring function
Alarm code definition
0 Disabled Executed
is defined
Alarm code
function status
Enabled
Issuance of defined
alarm
Issued Executed At least one alarm code
Not issued Not executed
Execution of resume program or
FFR sequence at restart
CAUTION
Defined alarms must have the suspension alarm attribute. Do not define any
warning alarm as an alarm code.
For multi-task
This item can be set by each instruction number.
Resume program is being executed
Execution of
resume
Execution of original
Alarm code
monitoring function
Fig. 6.7 (b) Enabling/disabling the alarm code monitoring function in the resume program function
ram
ram
DSBL
Execution of
RESUME_PROG[ ]
↑
ENBL
Original program is being suspended
DSBL DSBL
ENBL
↑
Execution of
CLEAR_RESUME_PROG
Execution of FFR
sequence
Execution of
maintenance program
Execution of original
ram
FFR sequence is being executed
Maintenance program is being executed
Original program is being suspended
Alarm code
monitoring function
Fig. 6.7 (c) Enabling/disabling the alarm code monitoring fun ction in the fast exit/entry feature
DSBL
MAINT_PROG[ ]
ENBL
↑
Execution of
DSBL
ENBL
- 35 -
Page 62

6. AUTOMATIC ERROR RECOVERY FUNCTION B-83284EN-2/05
D
H
Defining automatic error recovery alarm conditions
By inputting a defined digital input signal, an automatic error recovery alarm can be issued. When this
alarm is defined for the alarm-time automatic start feature, the resume program or the FFR sequence can be
executed automatically by inputting the digital input signal.
As the message for an automatic error recovery alarm, a message defined for a user alarm can be used. The
alarm severity can be set to either LOCAL or GLOBAL selectively. When LOCAL is selected, the alarm is
issued only for a program that defines the resume program or the maintenance program. The status of a
digital input signal to be monitored can be set by selecting the signal type from among DI, RI, and WI,
changing the signal number, and selecting the trigger status between on and off.
Define the conditions for issuing an automatic error recovery alarm on the definition screen that is displayed by
pressing F3, DI_ALARM.
Error Recovery Setup
1/3
UALM Severity Type Value
1 [ 1] LOCAL DI[ 3] ON
2 [ 5] GLOBAL RI[ 6] OFF
3 [ 10] LOCAL DI[ 2] ON
[ TYPE ]
On this screen, the items shown below can be set. The alarm code of the automatic error recovery alarm is
12278.
• User alarm number
When the automatic error recovery alarm is issued, the user alarm message with the set number is
displayed as an alarm message. When this item setting has been changed, the new setting becomes
effective immediately.
• Alarm severity
This item can choose whether the automatic error recovery alarm is a local alarm or global alarm.
When LOCAL is set, the automatic error recovery alarm is issued only for the program that defines the
resume program or the maintenance program. If there is no program that defines the resume program
or the maintenance program, the alarm is regarded as a global alarm. When this item setting has been
changed, the new setting becomes effective immediately.
• Signal type
Choose the type of the digital signal for issuing the automatic error recovery alarm from among DI, RI,
and WI. When this item setting has been changed, the power must be turned off then back on for the
new setting to become effective.
• Signal number
Set the number of the digital signal for issuing the automatic error recovery alarm. When this setting
has been changed, the power must be turned off then back on for the new setting to become effective.
• Detection signal status
Set the status of the digital signal for issuing the automatic error recovery alarm to ON (high) or OFF
(low). When this setting has been changed, the power must be turned off then back on for the new
setting to become effective.
The standard number of automatic error recovery alarm conditions is three. This number can be increased to
up to five by changing system variable $RSMPRG_SV.$NUM_DI_ALM. After this system variable has
been changed, the power must be turned off then back on for the new setting to become effective.
ONE
ELP
- 36 -
Page 63

B-83284EN-2/05 6. AUTOMATIC ERROR RECOVERY FUNCTION
For multi-task
This item cannot be set by each instruction number. When this item is enabled in
•
either of instruction number, this function of all the instruction numbers are
automatically enabled.
When the alarm severity issues the automatic error recovery alarm of LOCAL
•
alarm when there are multiple programs that define the resume program or the
maintenance program, the automatic error recovery alarm of the number of
programs is issued.
Define the automatic error recovery alarm code in all the instruction numbers that
•
can be used when the automatic start feature is enabled, and the automatic error
recovery alarm code is defined in the monitored alarm codes. When LOCAL alarm
is defined in the automatic error recovery alarm only by the limited instruction
number, even if the LOCAL alarm is issued while multiple programs are executed
at the same time, the automatic start feature might not be able to be executed.
Resume program type recovery
Defining the resume program comment
A comment can be specified for the resume program instruction. Move the cursor to this item and press the
[ENTER] key. The screen enters comment input mode. A resume program comment is used to describe
additional information to be displayed on the program edit screen together with the resume program
instruction.
For multi-task
This item can be set by each instruction number.
Defining the resume program information DO
When the alarm code monitoring function and recovery switch DI function are both disabled, the resume
program is always executed at the time of restart after the original program is suspended. When both the
functions are enabled, it is difficult to determine whether the original program or resume program is to be
executed at restart.
The resume program information DO is on only when the resume program is executed at restart. When the
signal is off, the original program is executed at restart. With this function, the operator can know which
program is to be executed next.
If the following conditions are met, the resume program information DO goes on:
• The automatic error recovery function is enabled.
• Not the single step mode.
• The resume program is defined in the original program.
• The original program has a motion group.
• The original program is suspended, and the resume program is not yet completed.
• There is no optional function that disables the automatic error recovery function. See “Other
specifications and restrictions”.
• The user condition parameter is true. See “Conditions for executing the resume program”.
RESUME_PROG instruction User condition parameter
RESUME_PROG[1:Comment] $AUTORCV_ENB
RESUME_PROG[2:Comment] $AUTORCVENB2
RESUME_PROG[3:Comment] $AUTORCVENB3
RESUME_PROG[4:Comment] $AUTORCVENB4
RESUME_PROG[5:Comment] $AUTORCVENB5
• When the teach pendant is enabled:
- 37 -
Page 64

6. AUTOMATIC ERROR RECOVERY FUNCTION B-83284EN-2/05
- The operation mode (on the automatic error recovery manual operation screen) is TP_TEST.
• When the teach pendant is disabled:
- The operation mode (on the automatic error recovery manual operation screen) is AUTO.
- The remote conditions are met when system variable $RMT_MASTER is 0.
- There is no alarm code defined. If any alarm code is defined, the alarm code is issued.
- The recovery switch DI function is disabled. If this function is enabled, the recovery switch DI
signal is on.
CAUTION
1. While the resume program is being executed, single step operation cannot be
performed.
2. Even if the resume program information DO is on, the resume program is not
executed when backward execution of the original program is performed.
3. Backward execution in the resume program is possible.
4. The update cycle period for the resume program information DO is 300 ms. When
the conditions listed above have been changed, wait 300 ms before program
execution.
Start signal
Conditions are not met
Resume Program
Information DO
Conditions are met
Fig. 6.7 (d) Resume program information DO output timing chart
Execution of
resume program
Execution of original
program
For multi-task
This item can be set by each instruction number.
Setting the maximum number of automatic start repetitions
When a defined alarm is issued, the alarm-time automatic start feature automatically executes the resume
program, then resumes the original program. If the defined alarm is issued again when the original program
is resumed, the automatic start feature functions again. For example, the automatic start feature is activated
by an alarm indicating an arc start failure, then the same alarm is issued again when the original program has
resumed.
To prevent such an endlessly repeated condition, set the maximum number of automatic start repetitions.
The number of times the resume program is started repeatedly is counted internally. If the count exceeds the
set value, “INTP-134 Over automatic start Max counter” is issued, and the resume program information DO
is turned off at the same time. If this occurs, eliminate the cause of the alarm issued in the original program.
Then input the start signal.
CAUTION
The number of repetitions counted internally is cleared when the execution of a
move statement has terminated and when the CLEAR_RESUME_PROG
instruction has been executed.
For multi-task
This item can be set by each instruction number.
- 38 -
Page 65

B-83284EN-2/05 6. AUTOMATIC ERROR RECOVERY FUNCTION
Defining the automatic start count register
As mentioned above, the resume program may be executed several times repeatedly by the automatic start
feature. When the automatic start count register is defined, a different program can be executed as the
resume program each time the resume program is executed. For example, when the resume program is
executed for the first time by the automatic start feature, the register value is 1. When an alarm is issued
again during execution of the original program, and the resume program is then executed again by the
automatic start feature, the register value is 2. By executing a different subprogram in the resume program
according to the register value, different resume program operation can be performed each time the
repetition count is incremented.
CAUTION
When the resume program is executed by other than the automatic start feature,
the register value is 0. Therefore, a resume program must be created so that the
same subprogram is called when the register value is 0 and when the value is 1.
For multi-task
This item can be set by each instruction number.
Maintenance program type recovery
Defining the maintenance program comment
A comment can be specified for the maintenance program instruction. Move the cursor to this item and
press [ENTER] key. The screen enters comment input mode. A maintenance program comment is used to
describe additional information to be displayed on the program edit screen together with the maintenance
program instruction.
For multi-task
This item can be set by each instruction number.
Enabling/disabling the fast exit/entry feature
This item enables or disables the fast exit/entry feature.
When the automatic error recovery function and the fast exit/entry feature are enabled, and neither
monitored alarm codes nor the recovery switch DI are defined, the FFR sequence is always executed at
restart from the suspended state (except when the FFR sequence information DO is off).
When this item is disabled, the FFR sequence is not executed.
For multi-task
This item can be set by each instruction number.
Enabling/disabling dry run exit/entry operation
In the fast exit/entry feature, this item specifies whether exit from the stopped position and return to the
stopped position after maintenance program execution are to be performed at dry run speed. This item can
be set only for instruction number 1 in the single-task.
For multi-task
This item can be set by each instruction number.
- 39 -
Page 66

6. AUTOMATIC ERROR RECOVERY FUNCTION B-83284EN-2/05
Defining the FFR sequence information DO
When the alarm code monitoring function and recovery switch DI function are both disabled, the FFR
sequence is always executed at the time of restart after the original program is suspended. When both the
functions are enabled, it is difficult to determine whether the original program or the FFR sequence is to be
executed at restart.
The FFR sequence information DO is on only when the FFR sequence is executed at restart. And, because
the FFR sequence is not executed though the original program is executed at restart when the signal is off,
the maintenance program is not executed after the original program is completed. With this function, the
operator can know the FFR sequence is to be executed next.
If the following conditions are met, the FFR sequence information DO goes on:
• The automatic error recovery function is enabled.
• Not the single step mode.
• The maintenance program is defined in the original program.
• The resume program information DO is not on.
• The FFR sequence is being executed.
• The fast exit/entry feature is enabled.
• When the teach pendant is disabled:
- The remote conditions are met when system variable $RMT_MASTER is 0.
- There is no alarm code defined. If any alarm code is defined, the alarm code is issued.
- The recovery switch DI function is disabled. If this function is enabled, the recovery switch DI
signal is on.
CAUTION
1 Perform neither backward execution nor the single step operation while the FFR
sequence is executed.
2 The update cycle period for the FFR sequence information DO is 300 ms. When
the conditions listed above have been changed, wait 300 ms before program
execution.
3 When the teach pendant is enabled, the FFR sequence is not executed.
Start signal
Conditions are not met
FFR Sequence
Information DO
Conditions are met
Fig. 6.7 (e) FFR sequence information DO output timing chart
Execution of FFR
Sequence
Execution of original
program
For multi-task
This item can be set by each instruction number.
6.8 MANUAL OPERATION SCREEN OF THE RESUME
PROGRAM FUNCTION
A manual operation screen is supported for the resume program function (The fast exit/entry feature is not
supported.). To display the manual operation screen, first press MENU to display the screen menu, then
select ”3 MANUAL FCTNS”. Then, press F1, [TYPE] to display the screen switching menu, then select Err
recovery.
- 40 -
Page 67

B-83284EN-2/05 6. AUTOMATIC ERROR RECOVERY FUNCTION
D
[MENU] → 3 MANUAL FCTNS → Err recovery
Error Recovery MNFC
1/1
Instruction number: 1
Error recovery DO status: OFF
Original program:
[WELD ]
Defined resume program:
[WIRE_CUT ]
RESUME comment: [Wire cutting ]
1 Operation mode: AUTO
[ TYPE ] DETAILNUMBER[CHOICE]
Error Recovery MNFC
1/11
Instruction number: 1
1 Auto error recovery enabled: Yes
2 PAUSED & resume prog incomp: No
3 Program has motion group: No
4 Not in single step mode: No
5 Resume program is defined: No
6 Mode is(AUTO ): Yes
7 Approval DI is ON: None
8 Defined alarm occurs: None
9 Remote when $RMT_MASTER is 0: None
10 No disabled options: None
11 User condition param enable: Yes
[ TYPE ]
ONE
Selecting the instruction number
The instruction number of the resume program instruction is indicated. It is possible to switch to a manual
operation screen of other instruction numbers by changing this item.
Resume program information DO status
The resume program information DO status is indicated. Even when the resume program information DO is
not defined, its status can be indicated. From this information, the operator can know which program, the
resume program or original program, is to be executed.
Original program
The name of the original program that defines the resume program is indicated.
Defined resume program
The name of the resume program defined in the currently selected program is indicated. From this
information, the operator can check whether a wrong resume program is defined or not.
CAUTION
If a wrong program is defined as the resume program, the robot operation is
unpredictable. Therefore, check that the resume program is correct.
Resume program comment
The comment specified for the resume instruction is indicated.
Operation mode
There are three operation modes. The standard setting is AUTO. When the display changes from this screen
to another, AUTO is automatically set again.
- 41 -
Page 68

6. AUTOMATIC ERROR RECOVERY FUNCTION B-83284EN-2/05
Operation mode Explanation
AUTO This mode should be set when the teach pendant is disabled. When this mode is
selected, the resume program is executed according to the status of the alarm code
monitoring function and recovery switch DI function. If this mode is selected when the
teach pendant is enabled, the resume program is not executed.
NO_EXEC When this mode is selected, the resume program information DO is always off.
Therefore, in this mode, the resume program is not executed.
TP_TEST This mode should be set when the teach pendant is enabled.
When this mode is selected, and when the teach pendant is enabled, the resume
program is always executed regardless of the status of the alarm code monitoring
function or error recovery switch DI function.
Displaying detail conditions of the resume program information DO
When F2, DETAIL is pressed on the manual operation screen of the automatic error recovery function,
detail conditions related to the resume program information DO status are displayed. When all items on the
detail screen are set to Yes or None, the resume program information DO is turned on. When the resume
program information DO is off, and you cannot find the cause of the DO being off, check this screen.
Auto error recovery enabled
This item indicates whether this function is enabled or disabled on the setting screen of the automatic error
recovery function.
PAUSED & resume prog incomp
This item indicates the following conditions:
• The original program must be in the suspended state.
• A resume program must be defined in the original program, and the execution of the resume program
must not have been completed.
Program has motion group
This item indicates that the selected program has a motion group.
Not in single step mode
This item indicates that the single step mode is not set.
The single step LED on the teach pendant indicates the single step status of the original program. Even
when the single step key is pressed while the resume program is suspended, and the single step LED goes on,
the resume program information DO is held on. This is because the LED indicates that the original program
is in single step mode; the resume program is not in single step mode.
Resume program is defined
This item indicates that a resume program is defined in the original program.
Mode is (xxxx)
This item indicates that the operation mode is suitable for the current status.
For example, when the teach pendant is disabled, “AUTO” is indicated in the portion “xxxx.” When the
teach pendant is enabled, “TP_TEST” is indicated.
Approval DI is ON
This item indicates the recovery switch DI status. When the DI number is not defined, or when the teach
pendant is enabled, “None” is indicated.
Defined alarm occurs
This item indicates that an alarm code is defined, and that alarm is issued.
When no alarm code is defined, or when the teach pendant is enabled, “None” is indicated.
- 42 -
Page 69

B-83284EN-2/05 6. AUTOMATIC ERROR RECOVERY FUNCTION
Remote when $RMT_MASTER is 0
This item indicates that remote conditions are met. This function is enabled only when the teach pendant is
disabled, system variable $RMT_MASTER is 0, and system variable $RSMPRG_SV.$CHK_REMOTE is
true.
No disabled options
There are options that cannot be used together with the automatic error recovery function. This item
indicates whether such options are present or not.
User condition param enable
This item indicates the status of the user condition parameter. For how to use the user condition parameter,
see “Changing conditions for executing the resume program”.
6.9 EXECUTION OF THE RESUME PROGRAM FROM THE
TEACH PENDANT AND TEST MODE
Normally, the automatic error recovery function is used when production is started with the teach pendant
disabled. When checking the resume program during teaching, set the operation mode to TP_TEST on the
manual operation screen. In TP_TEST mode, the resume program can be executed regardless of the
recovery switch DI status and whether a defined alarm is issued or not. A manual operation screen is not
supported for the fast exit/entry feature.
6.10 CHANGING CONDITIONS FOR EXECUTING THE RESUME
PROGRAM
To use resume program execution conditions other than alarm codes, use user condition parameter and the
status monitoring function.
RESUME_PROG instruction User condition parameter
RESUME_PROG[1:Comment] $AUTORCV_ENB
RESUME_PROG[2:Comment] $AUTORCVENB2
RESUME_PROG[3:Comment] $AUTORCVENB3
RESUME_PROG[4:Comment] $AUTORCVENB4
RESUME_PROG[5:Comment] $AUTORCVENB5
For example, to execute the resume program when R[1] is 1, create the following monitor program, and start
MONIT1.CH on the system monitor screen.
MONIT1.CH
1:WHEN R[1]=1,CALL DORESUME
2:WHEN R[1]<>1,CALL NORESUME
MONIT2.CH
1:WHEN R[1]=1,CALL DORESUME
DORESUME.TP
1:$AUTORCV
2:MONITOR MONIT3
NORESUME.TP
1:$AUTORCV
2:MONITOR MONIT2
ENB=1
ENB=0
MONIT3.CH
1:WHEN R[1]<>1,CALL NORESUME
The start conditions can be changed by modifying the monitor program. For how to use the status
monitoring function, refer to the Status monitoring function section in Utility chapter of R-30iB/R-30iB
- 43 -
Page 70

6. AUTOMATIC ERROR RECOVERY FUNCTION B-83284EN-2/05
Mate Controller operator’s manual (Basic Operation) (B-83284EN). In this case, the automatic start
function is unavailable.
6.11 OTHER SPECIFICATIONS AND RESTRICTIONS
Automatic error recovery function
• The automatic error recovery function supports the power failure handling function.
• The automatic error recovery function is disabled when one of the following options is loaded:
- Arc sensor
- AVC (TIG arc length control)
- Root path memorization
- Line tracking
- Soft float
- Continuous turn
- Remote TCP
Resume program function
• While the resume program is being executed, single step operation is not performed. Single step mode
is valid only for the original program.
• When the cursor line is changed and executed while the original program is suspended, the resume
program is not executed.
• While the resume program is being executed, the resume program execution status cannot be checked
on the program edit screen. On the edit screen, the suspended original program is displayed.
• The resume program instructions cannot be defined in the program executed by the RUN instruction.
• When the program execution is done after the cursor line in the original program is moved while the
resume program is suspended, the popup menu to confirm the movement of the cursor is displayed.
When Yes is selected for the question on the popup menu, the original program is executed starting
from the new cursor line. When No is selected, the resume program is restarted.
• Programs other than the original program cannot be selected by PNSTROBE signal while the resume
program is executed.
• When PNSTROBE signal has been on when the resume program starts, the alarm is issued. Turn off
PNSTROBE signal when the resume program starts.
• When programs other than the original program are selected while executing an original program, the
original program is automatically selected again at the same time as the resume program's
starting/ending.
• Never teach the arc and weaving instructions in the resume program. If an arc instruction is executed in
the resume program while arc welding is being performed by the original program, alarm is issued. In
addition, weaving operation is not performed within the resume program.
Fast exit/entry feature
• When an original program is a single step mode, the FFR sequence is not started.
• When the cursor line is changed and executed while the original program is suspended, the FFR
sequence is not executed.
• The maintenance program instructions cannot be defined in the program executed by the RUN
instruction.
• Programs other than the maintenance program cannot be selected by PNSTROBE signal while the
FFR sequence is executed.
• When PNSTROBE signal has been on when the FFR sequence starts/ends, the alarm is issued. Turn
off PNSTROBE signal when the FFR sequence starts/ends.
• When programs other than the original program are selected while executing an original program, the
original program is automatically selected again at the same time as the FFR sequence 's starting.
- 44 -
Page 71

B-83284EN-2/05 6. AUTOMATIC ERROR RECOVERY FUNCTION
6.12 WARNINGS (Be sure to read this section for safety.)
When using the automatic error recovery function, observe the following safety precautions:
• If a wrong program or a program causing wrong operation is defined as a resume program or a
maintenance program, the robot moves in a direction the operator cannot predict. Define a correct
program.
• Before inputting the start signal and before pressing [FWD] key on the teach pendant, for safety, check
the resume program information DO status to confirm whether the original program or resume
program is to be started.
• Before inputting the start signal and before pressing [FWD] key on the teach pendant, for safety, check
the FFR sequence information DO status to confirm whether the original program or maintenance
program is to be started.
• If the operation mode is set to TP-TEST on the manual operation screen of the automatic error
recovery function, the resume program is started even when a defined alarm is not issued or when the
recovery switch DI is off.
• When an operation mode other than AUTO is set on the manual operation screen of the automatic error
recovery function, then the display is changed to another screen, the operation mode is set to AUTO
again automatically. To use an operation mode other than AUTO, always keep displaying the manual
operation screen of the automatic error recovery function.
• When the resume program or the maintenance program terminates in the middle, and the start signal is
input, the robot might do action not predictable. Therefore, before inputting the start signal, check the
program name and the program start line that will be executed with the next start signal. And, if an
interfering object exists, jog the robot to a position where interfering object doesn't exist, then input the
start signal.
• Perform neither backward execution nor the single step operation while the FFR sequence is executed.
- 45 -
Page 72

7. REMOTE TCP FUNCTION B-83284EN-2/05
A
7 REMOTE TCP FUNCTION
The REMOTE TCP function is used to process the work by moving the work which is placed on the robot
hand. Robot can keep the relation between the tool fixed on the ground and work.
Example of using REMOTE TCP function (by Sealing application)
Sealing Gun
Remote TCP
Work
rm
Advantage of Remote TCP
● The gun is fixed on the ground, then the cabling of tool is easy.
● It is not necessary to take the heavy gun.
● Even if you do not use the REMOTE TCP function, you could process the work by moving the work
which is placed on the robot hand. But if you rotate the work against the TCP, the tool can not do the
coordinate motion against the work.
Case of using REMOTE TCP function
The robot can rotate to keep the point at which Remote TCP taught the work
- 46 -
Page 73

B-83284EN-2/05 7. REMOTE TCP FUNCTION
A
Case of NOT using REMOTE TCP function
s the center of rotation is changed by the variation of work position, the robot can not
rotate to keep the point at which Remote TCP taught the work.
● You can get the easy teaching operation by remote TCP jog function.
Remote TCP
Easy to jog the Remote TCP
regardless of location and
orientation.
● You can reduce teaching point drastically.
Remote TCP No Remote TCP
You need the minimum teaching
points regardless of the orientation
and location of work.
No Remote TCP
No easy to jog the Remote TCP.
You need many teaching points
according to the direction and
position of work.
- 47 -
Page 74

7. REMOTE TCP FUNCTION B-83284EN-2/05
● You can do uniform sealing against work.
Remote TCP No Rem o te TCP
The robot moves with the taught
speed, so you can do uniform sealing.
You can not do teaching to keep the
relative speed, so you can not do
uniform sealing.
Required option
● Remote TCP (A05B-2600-J624)
Limitation
● REMOTE TCP cannot be used in joint motion and Wrist joint motion.
● REMOTE TCP cannot be used in the robot which is installed the coordinated motion function.
● REMOTE TCP cannot be used with the following functions.
- Line tracking
- Weaving
- Touch sensor
- Arc sensor
- AVC(TIG arc length control)
- Root path memorization
- Singularity avoidance
● In TCP speed output function, when the robot motion changes from REMOTE TCP to normal, the
accuracy of the speed prediction function may lower.
7.1 SETUP
Setting up
If you use the REMOTE TCP function, you need to teach the tool center point which is fixed on the ground
to the robot.
Y
X
Z(Tool Direction)
You can set REMOTE TCP position by using the same method for User frame.
1 Press [MENU] key.
2 Select SETUP.
3 Press F1, [TYPE].
4 Select Frames.
- 48 -
Page 75

B-83284EN-2/05 7. REMOTE TCP FUNCTION
5 If user frame is not displayed, press F3, [OTHER], and select User/RTCP If F3, [OTHER], is not
displayed, press PREV.
6 Move the cursor to the REMOTE TCP frame to use.
SETUP Frames
User/RTCP G1 / Direct Entry 3/9
X Y Z Comment
1 0.0 0.0 0.0 [ ]
2 0.0 0.0 0.0 [ ]
3 0.0 0.0 0.0 [ ]
4 0.0 0.0 0.0 [ ]
5 0.0 0.0 0.0 [ ]
6 0.0 0.0 0.0 [ ]
7 0.0 0.0 0.0 [ ]
8 0.0 0.0 0.0 [ ]
9 0.0 0.0 0.0 [ ]
Active UFRAME/RTCP $MNUFRAMENUM[1] = 1
[ TYPE ] DETAIL [OTHER ] CLEAR SETIND >
7 Press F2, DETAIL.
8 Select the method from Direct Entry, Three Point or Four Point, and set the frame by using the same
method for User frame.
Remote TCP jog
When you do transitional jogging under the remote TCP mode, the robot behaves the same as it is under
normal jogging.
REMOTE TCP jogging is done by using the following procedure.
1 Enter to REMOTE TCP jogging mode.
2 Select the frame.
JOINT, REMOTE TCP USER, REMOTE TCP TOOL, REMOTE TCP JOG
3 Jog the robot.
4 Return from REMOTE TCP jogging mode.
< Change to REMOTE TCP jogging mode >
Please perform the following procedure to enter to REMOTE TCP jogging mode.
1 Press [FCTN] key.
Select “TOGGLE REMOTE TCP”.
The screen is changed as follows.
T2 R1 TOOL
100%
The robot motion is performed according to REMOTE
TCP TOOL No.1.
R1 TOOL
REMOTE TCP motion is performed according to the
tool frame.
Please perform the following procedure to return from REMOTE TCP jogging mode.
1 Press [FCTN] key.
2 Select “TOGGLE REMOTE TCP”.
- 49 -
Page 76

7. REMOTE TCP FUNCTION B-83284EN-2/05
Select frame
You change the coordinate system by pressing the COORD key. Please select the frame except for JOINT.
The display status is changed as follows.
JOINT R1/JFRM R1/WRLD R1/TOOL R1/USER
T2 R1 TOOL
100%
Select REMOTE TCP frame
When the robot enters to REMOTE TCP mode, you can select REMOTE TCP frame by using how to select
the normal frame. And you can change REMOTE TCP frame by the following method, too.
1 Press [FCTN] key.
2 Select “CHANGE RTCP FRAME”.
The number is changed as follows.
1 2 3 4 5 1
T 2 R1 TOOL
SETUP Frames
User/RTCP G1 / Direct Entry 3/5
X Y Z Comment
1 0.0 0.0 0.0 [ ]
2 0.0 0.0 0.0 [ ]
3 0.0 0.0 0.0 [ ]
4 0.0 0.0 0.0 [ ]
5 0.0 0.0 0.0 [ ]
6 0.0 0.0 0.0 [ ]
7 0.0 0.0 0.0 [ ]
8 0.0 0.0 0.0 [ ]
9 0.0 0.0 0.0 [ ]
[ TYPE ] DETAIL [OTHER ] CLEAR SETIND
30%
>
Programming and running by using REMOTE TCP
If you specify REMOTE TCP motion option, the robot moves remote TCP instead of robot TCP.
Please perform the following procedure to specify REMOTE TCP motion option.
1 Move the cursor to end of program line.
2 Press F4, [CHOICE].
3 Select “RTCP”.
Please perform the following procedure to remove REMOTE TCP motion option.
1 Move the cursor to end of program line.
2 Press F4, [CHOICE].
3 Select “No Option”.
You can not use RTCP with JOINT motion.
<Programming example>
L P[1] 100mm/sec FINE RTCP
The work is moved to P[1] by the relative speed 100 mm/sec between the work and the remote tool.
C P[1]
P[2] 100mm/sec FINE RTCP
The work is moved to P[2] via P[1] by the relative speed 100 mm/sec between the work and the remote tool.
- 50 -
Page 77

B-83284EN-2/05 8. HIGH SENSITIVITY COLLISION DETECTION
8 HIGH SENSITIVITY COLLISION DETECTION
High-sensitivity collision detection provides a highly sensitive method to detect that the robot has collided
with an object and then stops the robot immediately.
Detection sensitivity of this function is greatly improved than normal collision detection function and this
helps to minimize the potential for damage to the end-of-arm tooling and robot.
8.1 SPECIFICATION
1) When collision is detected, the function issues an alarm and stops the robot quickly by decelerating it
in such a way that shocks to the robot can be decreased.
2) Since the detection sensitivity has previously been adjusted for each robot type, you can use this
function without adjusting it.
3) You can change the detection sensitivity by the program instruction or in the setting screen.
4) You can temporarily enable/disable this function by the program instructions. (It is impossible to
disable this function regularly.)
5) You can output signal to a DO when collision is detected.
6) You can output status of the collision detection (enabled / disabled) to a DO.
7) The detection sensitivity is automatically increased during teaching operation.
8) This function is enabled since the power of the robot controller is on.
8.2 SETTINGS
Payload information (Basic)
Set the function with load information and the information about devices installed on the robot.
Since the function uses the load information and device information to detect a collision, it is necessary to
set the function with these pieces of information. Be sure to specify the weight of the load, the center of
gravity, and the weight of each device on the robot accurately.
If the inertia (shape) of the load is large, it may be necessary to specify the inertia around the gravity center
of the load. (If the tool is big, and simply specifying its weight and gravity center does not assure accurate
detection, specify its inertia.)
See Section 3.17, “LOAD SETTING” in FANUC Robot series R-30iB/R-30iB Mate CONTROLLER
OPERATOR’S MANUAL (Basic Operation) (B-83284EN) or Section 9, “ LOAD ESTIMATION” in this
manual, for how to specify load information.
Collision Guard Setup screen (Optional)
The detection sensitivity has previously been adjusted for each robot type. If you want to change the
sensitivity, set in this screen.
Also, If you want to output the status of the collision detection (enabled / disabled), set in this screen.
See Section 8.4, "Collision Guard Setup Screen".
Program instructions (Optional)
If it is previously anticipated that a strong force will be exerted during an operation and users want to
temporarily disable collision detection or change the detection sensitivity, insert program instructions.
See Section 8.5, "Program Instructions".
- 51 -
Page 78

8. HIGH SENSITIVITY COLLISION DETECTION B-83284EN-2/05
8.3 COLLISION GUARD SETUP SCREEN
Set as below.
1 Press [MENU] key.
2 Select "6 SETUP".
3 Press F1, [TYPE].
4 Select "Coll Guard". The following screen will be displayed.
COL GUARD SETUP
1/4
GROUP: 1
Collision Guard status: DISABLED
1 Sensitivity: 100%
2 Sensitivity Def. Reg.: R[ 0]
3 Collision Guard Error: DO[ 0]
4 Col. Guard enabled: DO[ 0]
[ TYPE ] HELP GROUP
Fig. 8.3 Collision guard setup screen
5 Setup each item of Collision Guard Setup screen referring to Table 8.3.
Table 8.3 Setup items of collision guard setup screen
Item default Description
Group
Collision Guard
Status
Sensitivity 100% This item allows you to set the level of sensitivity for Collision Detection for the
Sensitivity Def. Reg. 0 This item allows you to specify the register that can be used with the COL
Collision Guard Error 0 This item allows you to specify a Digital Output that will be turned ON when a
1 This item indicates the currently selected group to which the other items in the
menu apply. Note that you cannot edit this field directly. Instead, the current
group is selected by pressing F3, GROUP and entering the group number you
wish to display. You will only be able to select a group that supports
High-Sensitivity Collision Detection.
ENABLED This item specifies whether collision detection is enabled or disabled for the
currently selected group.
This item cannot be changed in this setup screen.
currently selected group.
Minimum is 1%. Maximum is 200%.
The lower the value, the lower the sensitivity.
The higher the value, the higher the sensitivity.
In some cases, you can decrease the sensitivity value to eliminate false
alarms. In some cases, you can increase the sensitivity value to provide faster
response.
GUARD ADJUST teach pendant instruction to adjust the sensitivity of
Collision Detection within a program. A register number of 0 indicates that the
register is not used.
Collision Detect Alarm occurs. A value of 0 indicates that no output will be
turned on.
- 52 -
Page 79

B-83284EN-2/05 8. HIGH SENSITIVITY COLLISION DETECTION
Item default Description
Col. Guard enabled 0 This item allows you to specify a Digital Output that will be turned on w henever
Collision Detection is enabled via this setup menu, and turned off whenever
Collision Detection is disabled via this setup menu. A value of 0 indicates that
no output will be used.
CAUTION
You can make the collision detection sensitivity insensitive by setting "Sensitivity"
less than 100, but in this case, this function cannot work effectively. Please use
this function by not decreasing "Sensitivity" as much as possible, and if you
decrease "Sensitivity" by necessity, please be very careful.
If robot repeatedly absorbs force as much as collision is detected, the mechanical
parts become strained and the life of the robot is shortened. It is desirable to
change program to lessen the force instead of changing the sensitivity.
NOTE
It is impossible to set the "Collision Guard Setup" at the group which includes a
robot that is not supported "High-Sensitivity Collision Detection" function.
8.4 PROGRAM INSTRUCTIONS
The program instructions below are reserved.
• COL DETECT ON
• COL DETECT OFF
• COL GUARD ADJUST
8.4.1 COL DETECT ON / COL DETECT OFF
These instructions allow you to enable/disable collision detection during program execution.
By default, collision detection is enabled.
• To disable collision detection temporarily, include the "COL DETECT OFF" instruction in a teach
pendant program.
• To enable collision detection again, include the "COL DETECT ON" instruction in a teach pendant
program.
When the program is finished or aborted, collision detection turns enabled automatically.
Example
10: J P[1] 100% FINE
11: COL DETECT OFF
12: L P[2] 2000mm/sec CNT100
13: L P[3] 2000mm/sec CNT100
14: L P[4] 2000mm/sec CNT100
15: COL DETECT ON
16: J P[2] 50% FINE
This program disables collision detection with lines 12 to 14.
- 53 -
Page 80

8. HIGH SENSITIVITY COLLISION DETECTION B-83284EN-2/05
CAUTION
While collision detection is disabled, not only "High-Sensitivity Collision Detection"
function but also the basic collision detection function is disabled. Please be
careful adequately. For safety's sake, please set the collision detection disable
region as short as possible.
NOTE
The COL DETECT ON and COL DETECT OFF instructions will only apply to the
motion groups that are included in the group mask of the teach pendant program
that calls them. For example, if COL DETECT OFF is used in a teach pendant
program that contains group 2 only in its group mask, then Collision Detection will
only be disabled for group 2; it will remain enabled for all other groups.
8.4.2 COL GUARD ADJUST
This instruction allows you to adjust the sensitivity of collision detection within a teach pendant program.
The sensitivity value set by this instruction will temporarily override what has been set in the COL GUARD
SETUP menu.
This instruction can be used in three ways. (See Table 8.4.2.)
Table 8.4.2 COL GUARD ADJUST instruction
number of arguments the new sensitivity value
0 value of register whose register number is specified in the Collision Guard
Setup menu
1 (directly set) value entered explicitly
1 (indirectly set) value of set register
CAUTION
You can make the collision detection sensitivity insensitive by setting "Sensitivity"
less than 100, but in this case, this function cannot work effectively. Please use
this function by not decreasing "Sensitivity" as much as possible, and if you
decrease "Sensitivity" by necessity, please be very careful.
If robot repeatedly absorbs force as much as collision is detected, the mechanical
parts become strained and the life of the robot is shortened. It is desirable to
change program to lessen the force instead of changing the sensitivity.
NOTE
"COL GUARD ADJUST" instruction will apply only to the motion group(s) that is
indicated in the group mask of the program that uses COL GUARD ADJUST. For
example, if COL GUARD ADJUST is used in a program whose group mask is
group 2 only, then the new sensitivity will apply only to group 2; the sensitivity of all
other groups will remain unchanged.
If the group mask of the program that uses COL GUARD ADJUST contains a group that does not support
High-Sensitivity Collision Detection, a warning message will be posted as follows:
MOTN-404 Group # does not support HSCD
This message is just a warning to indicate that no action was taken on that group.
- 54 -
Page 81

B-83284EN-2/05 8. HIGH SENSITIVITY COLLISION DETECTION
To Use the COL GUARD ADJUST instruction without arguments in a TP program, the following
procedure should be used:
• Set the register(s) specified in the COLL GUARD SETUP menu for the appropriate group(s) to the
new sensitivity value(s).
NOTE
each group needs to be set.
If the TP program is a multiple group program, the appropriate register for
• Insert the COL GUARD ADJUST instruction into the TP program at the desired location.
NOTE If the register number in the COL GUARD SETUP menu is zero for one of the groups being
adjusted, then an error will be posted.
MOTN-400 No Coll. Guard Reg. Defined
If a valid register number is specified in the setup menu, but the data in that register is not an integer
between 1 and 200, then the following error will be posted:
MOTN-401 Coll. Guard Reg. Data Error
See the following screen for an example.
10: J P[1] 100% FINE
11: R[11]=80
12: COL GUARD ADJUST
13: L P[2] 2000mm/sec CNT100
14: L P[3] 2000mm/sec CNT100
15: L P[4] 2000mm/sec CNT100
16: R[11]=100
17: COL GUARD ADJUST
18: J P[5] 50% FINE
This example would apply to a single group program (say, a group 1 only program). In the example, it is
assumed that the register number has been set to 11 for group 1 in the COL GUARD SETUP menu.
Alternatively, the COL GUARD ADJUST instruction can be supplied with the new sensitivity value
directly. An example of how this could be done is as follows:
10: J P[1] 100% FINE
11: COL GUARD ADJUST 80
12: L P[2] 2000mm/sec CNT100
13: L P[3] 2000mm/sec CNT100
14: L P[4] 2000mm/sec CNT100
15: R[1]=100
16: COL GUARD ADJUST R[1]
17: J P[5] 50% FINE
To use the COL GUARD ADJUST instruction in this way, after inserting the instruction into the program,
move the cursor to the right of the instruction. Then, either type in the new sensitivity value directly, or
select F3"INDIRECT" and type in the desired register number.
As stated above, the COL GUARD ADJUST instruction will apply to all groups in the group mask of the TP
program that called it. However, if the instruction is used with an argument, the user also has the option to
restrict the groups whose sensitivity will be adjusted. This is accomplished by moving the cursor to the
argument filed and pressing the F1, GP_MASK key. Doing so will display the following menu at the top of
the Teach Pendant screen:
- 55 -
Page 82

8. HIGH SENSITIVITY COLLISION DETECTION B-83284EN-2/05
Collision Detect 1
1 Default
2 [GP:]
3
4
5
6
7
8
Selecting "1" for "Default" means default behavior of the instruction, i.e. all groups in the group mask are
adjusted. Selecting "2" inserts a "GP" modifier into the instruction as follows:
COL GUARD ADJUST GP1,2: ##
The cursor will then be on the "##", which is the field where the sensitivity can be directly entered. The user
can then move the cursor to the left to highlight the "GP1,2" field. Once this field is highlighted, the
function keys will have labels displayed for each available motion group, i.e. F1 will have "GP1", F2 will
have "GP2", etc. Pressing the appropriate function key will toggle the appearance of that group number in
the "GP1,2" field. Once the "GP1,2" field has been set, only those groups listed in this field will have their
sensitivity updated by the instruction.
By default, when a TP program that calls COL GUARD ADJUST is aborted, the sensitivity will be reset to
the value specified in the COL GUARD SETUP menu for each group in the program's group mask. This
feature can be disabled by setting the following system variable:
$HSCDMNGRP[g].$AUTO_RESET = 0
where "g" refers to the group number.
8.5 CAUTIONS
1 Collision Detection might detect a false collision when a collision has not occurred in the following
cases:
• Payload information has not been set correctly.
• The payload is larger than the maximum payload for the robot, or the inertia of the payload is too
large.
• Not enough voltage has been supplied to the controller.
• Low temperature.
• The ACC motion option has been used, causing jerky robot motion.
• Severe motion such as reverse motion which Cnt. is used.
• Linear motion occurs near singularity point where axes revolve in high speed.
Action: If collision misdetection occurred for the reasons above, try removing these reasons first.
If necessarily, insert COL GUARD ON / OFF or COL GUARD ADJUST instructions at the top
and bottom of where misdetection occurs for avoiding alarm stop.
2 Collision Detection is disabled in the following cases:
• Soft Float is enabled.
• The robot brakes are on.
• Calibration is not finished.
• While not releasing [SHIFT] key after pressed SHIFT + RESET
3 In order to decrease the force of collision, Collision Detection allows the robot axes to sag away from
the collision for a short time after detecting a collision. When this happens, vertical robot axes might
fall slightly after detecting a collision, due to the effect of gravity.
- 56 -
Page 83

B-83284EN-2/05 9. LOAD ESTIMATION
9 LOAD ESTIMATION
Load estimation is a function for estimating the weight of the load, such as tool and workpiece, mounted on
the hand of the robot.
The function enables the information stated above to be estimated automatically by running the robot.
To use this function, High Sensitive Collision Detection Package option or package option which includes
it (ex. Motion Package, Basic Interference Check, Intelligent Interference Check, ARC easy smart quick
recovery, Lincoln Asia-Pacific Arc package for Standard EQ, Lincoln Asia-Pacific Arc package) is
required. Using the function also requires that your model support the load estimation function. If your
model does not support the function, you cannot use it.
This chapter describes load estimation for 6-axis robots. For 5-axis robots, read J5 as J4 and J6 as J5.
9.1 OPERATING PROCEDURE
Load is estimated in the following flow:
1 Set the range of motion to be subjected to load estimation.
2 Execute load estimation.
Once a mechanical part such as a motor is replaced, it becomes necessary to make calibration.
If no calibration is made after mechanical part replacement, the precision of load estimation becomes lower.
CAUTION
While in execution, load estimation moves J5 and J6 axis with maximum speed
(100% joint motion). Do not enter the operating space of the robot. Also, please
make sure that all the devices attached to the concerned parts can withstand such
motion.
9.2 LOAD ESTIMATION PROCEDURE (for 6-Axis Robots)
This procedure is performed on the load estimation screen.
This screen is accessed from the motion performance screen.
1 Press [MENU] key to display the screen menu.
2 Select “6 SYSTEM” on the next page.
3 Press F1, [TYPE] to display the screen switching menu.
4 Select Motion. The list screen will be displayed. (If any other screen is displayed, press [PREV] key
several times until the list screen is displayed.) For a multi-group system, the list screen of another
group can be reached by pressing F2, GROUP.
- 57 -
Page 84

9. LOAD ESTIMATION B-83284EN-2/05
MOTION PERFORMANCE
Group1 1/10
No. PAYLOAD[kg] Comment
1 0.00 [ ]
2 0.00 [ ]
3 0.00 [ ]
4 0.00 [ ]
5 0.00 [ ]
6 0.00 [ ]
7 0.00 [ ]
8 0.00 [ ]
9 0.00 [ ]
10 0.00 [ ]
Active PAYLOAD number = 0
[ TYPE ] GROUP DETAIL ARMLOAD SETIND >
5 Press NEXT, then press F2, IDENT. The load estimation screen will be displayed .
MOTION/PAYLOAD ID
1/4
Group 1
Schedule No[ 1]:[****************]
1 PAYLOAD ESTIMATION *****
Previous Estimated value (Maximum)
Payload [Kg] : 0.00 ( 165.00)
Axis Moment [Nm]
J4: 0.00E+00 ( 9.02E+02)
J5: 0.00E+00 ( 9.02E+02)
J6: 0.00E+00 ( 4.41E+02)
Axis Inertia [Kg cm^2]
J4: 0.00E+00 ( 8.82E+05)
J5: 0.00E+00 ( 8.82E+05)
J6: 0.00E+00 ( 4.41E+05)
2 MASS IS KNOW [NO ] 165.000[Kg]
3 CALIBRATION MODE [OFF]
4 CALIBRATION STATUS *****
[ TYPE ] GROUP NUMBER EXEC APPLY >
6 Place the robot in the position where load estimation is to be performed.
NOTE
1 Only the J5 and J6 axes move during load estimation. The other axes stay in the
position where they are when load estimation begins.
The range of motion is defined as an interval between two points specified on
estimation position 1 and 2 screens. (See steps 10 and 12.)
2 Put the J5 rotation axis in a horizontal position.
The more vertical posture the J5 rotation axis takes, the lower the precision of
estimation becomes.
7 Press F3, NUMBER, and select the load setting schedule No. for which a load estimate is to be set up.
8 If the mass of the load for which load estimation is to be performed is known, move the cursor to line
2, select “YES”, and specify (enter) the mass.
- 58 -
Page 85

B-83284EN-2/05 9. LOAD ESTIMATION
A
NOTE
A load with very small mass cannot be estimated. As a rough guide, it requires the
load with 5% of maximum load capacity or more.
The estimation precision becomes higher when a mass is specified. Specify the
mass as much as possible.
Even if no mass is specified, estimation is possible provided that the following
condition is satisfied. However the precision becomes lower.
● The moment around the J5 and J6 axes must be sufficiently high (the mass must
be sufficiently great, and the distance A and B, the distance from center of gravity
to the rotation axes of J6 and J5, must be sufficiently large.).
J5 rotation axis
B
J6 rotation axis
Center of gravity of load
● As for positions set up on estimation position 1 and 2 screens, the center of gravity
of the load must be in or near the plane that contains the J5 and J6 rotation axes.
J5 rotation axis
Center of gravity
of load
J6 rotation axis
● As for the J6 axis, the interval between points specified on the estimation position
1 and 2 screens must be 180° in terms of angle.
9 Press [NEXT] key, then press F4, DETAIL. The estimation position 1 screen will be displayed.
- 59 -
Page 86

9. LOAD ESTIMATION B-83284EN-2/05
MOTION/ID POS1 ID
1/5
Group 1
1 POSITION for ESTIMATION POSITION1
J1 <**********>
J2 <**********>
J3 <**********>
J4 <**********>
2 J5 < -90.000>
3 J6 < -90.000>
J7 <**********>
J8 <**********>
J9 <**********>
4 SPEED Low < 1%> High <100%>
5 ACCEL Low <100%> High <100%>
[ TYPE ] POS.2 DEFAULT MOVE_TO RECORD
10 Specify estimation position 1. (Alternatively, the initial value can be used.)
Specify the positions of the J5 and J6 axes by entering their values directly. Alternatively, move the
robot to the desired position by jogging, then press [SHIFT] key + F5, RECORD to record the
position.
Now pressing [SHIFT] key + F4, MOVE_TO moves the robot to estimation position 1. Use this
procedure to identify the set position.
11 Pressing F2, POS.2 displays the estimation position 2 screen.
MOTION/ID POS2 ID
1/5
Group 1
1 POSITION for ESTIMATION POSITION2
J1 <**********>
J2 <**********>
J3 <**********>
J4 <**********>
2 J5 < 90.000>
3 J6 < 90.000>
J7 <**********>
J8 <**********>
J9 <**********>
4 SPEED Low < 1%> High <100%>
5 ACCEL Low <100%> High <100%>
[ TYPE ] POS.1 DEFAULT MOVE_TO RECORD
12 Specify estimation position 2. (Alternatively, the initial value can be used.)
Specify the positions of the J5 and J6 axes by entering their values directly. Alternatively, move the
robot to the desired position by jogging, then press [SHIFT] key + F5, RECORD to record the
position.
Now pressing [SHIFT] key + F4, MOVE_TO moves the robot to estimation position 2. Use this
procedure to identify the set position.
13 Press [PREV] key to return to the estimation screen.
14 Set the teach pendant enable switch to OFF, and press F4, EXEC. The message “Robot moves and
estimates. Ready?” will be displayed .
15 Specify whether to execute load estimation. (Selecting “YES” allows the robot to move. Pay
sufficient care to avoid danger.)
● To perform load estimation by running the robot, press F4, YES.
● To quit execution, press F5, NO.
16 After low-speed and high-speed operations are finished, load information is estimated. (Operation
switches automatically from low speed to high speed. Even when the robot is running at low speed, do
not get close to it, because otherwise you may get in a dangerous situation when the robot suddenly
starts running at high speed.)
- 60 -
Page 87

B-83284EN-2/05 9. LOAD ESTIMATION
17 Press F5, APPLY to set the estimate at a load setting schedule No. The message “Path and Cycle time
will change. Set it?” will be displayed .
18 Specify whether to set the estimate result.
● To set the estimate, press F4, YES.
● Not to set the estimate, press F5, NO.
19 If the value to be set is greater than the maximum allowable load (indicated in parentheses), the
message “Load is OVER spec! Accept?” will be displayed. Specify whether to set this value, just as in
the step above.
NOTE
If the estimation fails, any or all of the applied results (payload, payload center,
payload intertia) would be 0. Please check the PAYLOAD SET screen of the
applied schedule number after APPLY.
If mass is very small, mass is not specified, or moment around J5 or J6 is small,
estimation might fail. Please refer to NOTE at procedure 8, to see if the load fulfills
the conditions necessary to estimate.
9.3 CALIBRATION PROCEDURE (for 6-Axis Robots)
Once a mechanical part such as a motor is replaced, it becomes necessary to make calibration.
If no calibration is made after mechanical part replacement, the precision of load estimation becomes lower.
Calibration is controlled, using the load estimation screen. Calibration is started by setting the calibration
switch to ON and executing load estimation.
1 Make sure that there is nothing on the hand of the robot.
Calibration must be made without attaching anything to the hand of the robot.
NOTE
If calibration is performed with anything attached to the robot hand, incorrect
calibration data is set up, thus hampering a normal estimation.
In this case, make calibration again, properly this time.
2 Press [MENU] key to display the screen menu.
3 Select “6 SYSTEM” described on the next page.
4 Press F1, [TYPE] to display the screen switching menu.
5 Select Motion. The list screen will be displayed. (If any other screen is displayed, press [PREV] key
several times until the list screen is displayed.) For a multi-group system, the list screen of another
group can be reached by pressing F2, GROUP.
MOTION PERFORMANCE
Group1 1/10
No. PAYLOAD[kg] Comment
1 0.00 [ ]
2 0.00 [ ]
3 0.00 [ ]
4 0.00 [ ]
5 0.00 [ ]
6 0.00 [ ]
7 0.00 [ ]
8 0.00 [ ]
9 0.00 [ ]
10 0.00 [ ]
Active PAYLOAD number = 0
[ TYPE ] GROUP DETAIL ARMLOAD SETIND >
- 61 -
Page 88

9. LOAD ESTIMATION B-83284EN-2/05
6 Press [NEXT] key, then F2, IDENT. The load estimation screen will be displayed .
MOTION/PAYLOAD ID
1/4
Group 1
Schedule No[ 1]:[****************]
1 PAYLOAD ESTIMATION *****
Previous Estimated value (Maximum)
Payload [Kg] : 0.00 ( 165.00)
Axis Moment [Nm]
J4: 0.00E+00 ( 9.02E+02)
J5: 0.00E+00 ( 9.02E+02)
J6: 0.00E+00 ( 4.41E+02)
Axis Inertia [Kg cm^2]
J4: 0.00E+00 ( 8.82E+05)
J5: 0.00E+00 ( 8.82E+05)
J6: 0.00E+00 ( 4.41E+05)
2 MASS IS KNOW [NO ] 165.000[Kg]
3 CALIBRATION MODE [OFF]
4 CALIBRATION STATUS *****
[ TYPE ] GROUP NUMBER EXEC APPLY >
7 Place the robot in the position where load estimation is to be performed.
NOTE
1 Only the J5 and J6 axes move during load estimation. The other axes stay in the
position where they are when load estimation begins.
The range of motion is defined as an interval between two points specified on
estimation position 1 and 2 screens. (See steps 9, 10, and 12.)
2 Put the J5 rotation axis in a horizontal position.
The more vertical posture the J5 rotation axis takes, the lower the precision of
estimation becomes.
8 Press [NEXT] key, then F4, DETAIL. The estimation position 1 screen will be displayed .
MOTION/ID POS1 ID
1/5
Group 1
1 POSITION for ESTIMATION POSITION1
J1 <**********>
J2 <**********>
J3 <**********>
J4 <**********>
2 J5 < -90.000>
3 J6 < -90.000>
J7 <**********>
J8 <**********>
J9 <**********>
4 SPEED Low < 1%> High <100%>
5 ACCEL Low <100%> High <100%>
[ TYPE ] POS.2 DEFAULT MOVE_TO RECORD
9 Specify estimation positions 1 and 2. Try to use default values as much as possible.
Press F3, DEFAULT, and specify default values for estimation positions 1 and 2, speed, and
acceleration.
10 Pressing SHIFT + F4, MOVE_TO moves the robot to estimation position 1. Make sure that it is safe to
move the robot to estimation position 1.
- 62 -
Page 89

B-83284EN-2/05 9. LOAD ESTIMATION
If it is dangerous to move the robot to estimation position 1, manipulate the J1 to J4 axes by jogging to
move the robot to a position where the robot can move safely.
11 Pressing F2, POS.2 displays the estimation position 2 screen.
MOTION/ID POS2 ID
1/5
Group 1
1 POSITION for ESTIMATION POSITION2
J1 <**********>
J2 <**********>
J3 <**********>
J4 <**********>
2 J5 < 90.000>
3 J6 < 90.000>
J7 <**********>
J8 <**********>
J9 <**********>
4 SPEED Low < 1%> High <100%>
5 ACCEL Low <100%> High <100%>
[ TYPE ] POS.1 DEFAULT MOVE_TO RECORD
12 Pressing [SHIFT] key + F4, MOVE_TO moves the robot to estimation position 2. Make sure that it is
safe to move the robot to estimation position 2.
If it is dangerous to move the robot to estimation position 2, manipulate the J1 to J4 axes by jogging to
move the robot to a position where the robot can move safely.
If you moved any of the J1 to J4 axes, press F2, POS.1 to go back to the estimation position 1 screen,
and follow this procedure again from step 10.
13 Press [PREV] key to return to the load estimation screen.
14 Move the cursor to CALIBRATION MODE on line 3 to turn it “on”.
NOTE
Once calibration is completed, CALIBRATION MODE becomes “off”
automatically.
Do not change CALIBRATION MODE during calibration or load estimation.
Otherwise, calibration may be made incorrectly or may not be made at all.
15 Move the cursor to line 4 (so that “EXEC” will be displayed at F4), and set the teach pendant enable
switch to OFF, then press “EXEC”. The message “Robot moves and estimates. Ready?” will be
displayed .
16 Specify whether to perform load estimation. (Selecting “YES” causes the robot to move. Pay
sufficient care to avoid danger.)
● To perform load estimation by running the robot, press F4, YES.
● To quit execution, press F5, NO.
17 After low-speed and high-speed operations are finished, calibration is completed. (Operation switches
automatically from low speed to high speed. Even when the robot is running at low speed, do not get
close to it, because otherwise you may get in a dangerous situation when the robot suddenly starts
running at high speed.)
- 63 -
Page 90

9. LOAD ESTIMATION B-83284EN-2/05
9.4 OTHER RELATED MATTERS
(1) Motion range
If the motion range between estimation positions 1 and 2 becomes narrower, the estimation precision may
get lower.
The actual motion range should preferably be as wide as the default motion range.
(2) Acceleration for motion used in load estimation
The estimation precision is low for the load whose moment inertia is relatively low compared with the
maximum allowable load of the robot. This is because the influence by the moment inertia to the torque of
the robot motor is weak.
The estimation precision for this light load may be able to be increased by increasing the acceleration used
during operation for load estimation.
Try to increase the acceleration by specifying a larger value in “ACCEL - High” on the estimation position
1 and 2 screens; however, do not specify so large a value that vibration becomes serious during operation.
(3) Calibration data
The following system variable holds calibration data.
If improper calibration data is set up, for example, by making calibration with a load mounted by mistake,
reassigning the previous data to the system variable can restore the previous calibration data.
It is recommended to keep note of the previous calibration data so as to enable restoration.
(4) Payload setting for estimating motion
If payload setting data while in estimating motion is far different from the actual payload, the estimating
motion may cause oscillation. To stabilize the estimating motion, it is recommended to set up the payload
data by rough calculation before executing estimation.
Setting rough payload data in advance may help enhancing the precision of the estimation, especially for the
payload which does not have sufficient moment around the J5 and J6 axes.
SPLCL_GRP[group].$TRQ_MGN[axis]
group : Group number
axis : Axis number
- 64 -
Page 91

B-83284EN-2/05 10. PAYLOAD OVER AND PAYLOAD SETTING CONFIRM FUNCTION
10 PAYLOAD OVER AND PAYLOAD SETTING
CONFIRM FUNCTION
This function is a part of “Payload identification function” (J669) option.
Although “packages that include Payload identification function” do not include this function.
Payload over and payload setting function adds an elective “PayLoadCheck” in pull-up menu of system
screen.
In “PayLoadCheck” screen, you can use payload over confirm function and payload setting confirm
function.
Payload Over Confirm Function
This is a function to do not show overload warning when motor is able to move in actual program with the
payload that is over specification.
The program to be evaluated has to be executed beforehand. Then this function evaluates the last executed
program when F5(OVLD) is selected. And maximum torque of the last executed program and rated torque
is compared.
NOTE
Overload warning is disabled when the maximum torque of checked program is
lower than rated torque. Note that overload warning is not shown even if maximum
torque of the other program is higher than rated torque.
Payload Setting Confirm Function
This function evaluates payload setting accuracy with little motion of robot.
By this function, customers can confirm whether a payload setting is done correctly after a robot is installed
on production line.
It may be difficult to move robot widely on production lines, this function roughly estimates a payload by
moving J5 and J6 axes slightly and compares with the value of payload setting and shows an error.
When this function is used, robot has to be in the position where J5 and J6 are loaded large moment. Only
J5 and J6 have to be loaded almost maximum moment with current payload and other axes have no
limitation.
By this function, J5 and J6 axes move between current position+1[degree] and current position–1[degree].
NOTE
Confirm that robot does not interfere if J5 and J6 axes move between current
position+1[degree] and current position–1[degree].
Payload setting accuracy will be shown after robot moved.
Payload setting accuracy of payload [1]-[10] is stored.
- 65 -
Page 92

10. PAYLOAD OVER AND PAYLOAD SETTING CONFIRM FUNCTION B-83284EN-2/05
10.1 LIMITATIONS
Group
This function supports robot at group 1 only (even if multi motion group option is ordered).
Robot Type
This function supports robot with 6 rotary axes robots. (In supported type, $PLID_GRP.$ROB_TYPE has
to be 1 or 2 and $SCR_GRP.$NUM_ROB_AXS has to be 6.)
OK: R-2000iB/xxxF, LR Mate 200iD etc.
NG: robot with linear axis such as R-2000iB/xxxT etc.
NG: robot with 5 axes such as LR Mate200iD/7H etc.
10.2 PROCEDURE
10.2.1 Procedure to Show Payload Over and Payload Setting Confirm
Screen
1 Press [MENU] key to bring up the screen menu.
2 Select “SYSTEM” on the next page.
3 Press F1“[TYPE]” to display the pull-up menu.
4 Select “PayLoadCheck”. The following screen will be displayed.
PAYLOADSET/OVLD JOINT 10%
1/9
group1 Payload[10] Payload Setting Err.
J4J5: 0.0% J6: 0.0% [NOT DONE]
Push 'PLSET' to check payload setting.
Payload Setting Status [OVER LOAD!]
run Prog in low OVR and push 'OVLD'key.
Trq Chk[push 'OVLD' to check overload]
J1: 0.00% J2: 0.00% J3: 0.00%
J4: 0.00% J5: 0.00% J6: 0.00%
[ TYPE ] PLSET OVLD
10.2.2 Procedure to Use Payload Setting Confirm (When Payload is
Changed)
1 Abort all programs which are running or paused.
2 Move robot to the position where J5 and J6 are loaded almost maximum moment with current payload.
NOTE
Confirm that robot does not interfere if J5 and J6 axes move between current
position+1[degree] and current position–1[degree].
3 Turn off the teach pendant enable switch.
4 Display payload over and payload setting confirm screen. (Refer to the previous section.)
5 Press F4(PLSET) key.
6 Press F3(yes) key.
7 Wait until the right column of the line below “Payload Setting Err.” becomes ”DONE” from
“DOING”.(about 30 seconds)
- 66 -
Page 93

B-83284EN-2/05 10. PAYLOAD OVER AND PAYLOAD SETTING CONFIRM FUNCTION
PAYLOADSET/OVLD JOINT 10%
1/9
group1 Payload[10] Payload Setting Err.
J4J5: 0.0% J6: 0.0% [[DOING]
ROBOT IS MOVING!!!!
Payload Setting Status [OVER LOAD!]
run Prog in low OVR and push 'OVLD'key.
Trq Chk[push 'OVLD' to check overload]
J1: 0.00% J2: 0.00% J3: 0.00%
J4: 0.00% J5: 0.00% J6: 0.00%
[ TYPE ] PLSET OVLD
8 From “Payload Setting Err.”, you can confirm whether a payload setting is done correctly. Threshold to
decide that a payload setting is done correctly is 10%.
PAYLOADSET/OVLD JOINT 10%
1/9
group1 Payload[10] Payload Setting Err.
J4J5:12.34% J6:17.18% [DONE ]
Set payload again if the error is large
Payload Setting Status [OVER LOAD!]
run Prog in low OVR and push 'OVLD'key.
Trq Chk[push 'OVLD' to check overload]
J1: 0.00% J2: 0.00% J3: 0.00%
J4: 0.00% J5: 0.00% J6: 0.00%
[ TYPE ] PLSET OVLD
NOTE
You cannot execute payload setting confirm when other program is running or
paused.
10.2.3 Procedure to Use Payload Over Confirm (When The Program
or Payload is Changed)
1 Please execute torque check by following procedure when “Payload Setting Status” is “OVER
LOAD!”.
PAYLOADSET/OVLD JOINT 10%
1/9
group1 Payload[10] Payload Setting Err.
J4J5:12.34% J6:17.18% [DONE ]
Set payload again if the error is large
Payload Setting Status [OVER LOAD!]
run Prog in low OVR and push 'OVLD'key.
Trq Chk[push 'OVLD' to check overload]
J1: 0.00% J2: 0.00% J3: 0.00%
J4: 0.00% J5: 0.00% J6: 0.00%
[ TYPE ] PLSET OVLD
2 The program to be payload over confirmed has to be executed beforehand. Please elect the program to
be payload over confirmed. (Push [select] key, select program and press [ENTER] key.)
3 Set override 10% or lower. And execute the program.
4 Then display payload over and payload setting confirm screen. (Refer to the two sections previous.)
- 67 -
Page 94

10. PAYLOAD OVER AND PAYLOAD SETTING CONFIRM FUNCTION B-83284EN-2/05
5 Push F5(OVLD) key.
6 Message to ask you to modify program is shown when “Trq Chk” became “OVERLOAD”.
PAYLOADSET/OVLD JOINT 10%
1/9
group1 Payload[10] Payload Setting Err.
J4J5:12.34% J6:17.18% [DONE ]
Set payload again if the error is large
Payload Setting Status [OVER LOAD!]
run Prog in low OVR and push 'OVLD'key.
Trq Chk[OVERLOAD:please modify program
J1: 0.00% J2: 88.88% J3:108.00%
J4: 10.00% J5:109.00% J6: 10.00%
[ TYPE ] PLSET OVLD
7 Message to ask you to power off and on to disable over load warning is shown when “Trq Chk” became
“OK”.
PAYLOADSET/OVLD JOINT 10%
1/9
group1 Payload[10] Payload Setting Err.
J4J5:12.34% J6:17.18% [DONE ]
Set payload again if the error is large
Payload Setting Status [OVER LOAD!]
run Prog in low OVR and push 'OVLD'key.
Trq Chk[OK:power off/on to erase warn]
J1: 0.00% J2: 88.88% J3: 90.00%
J4: 10.00% J5:109.00% J6: 10.00%
[ TYPE ] PLSET OVLD
NOTE
Overload warning is disabled when the maximum torque of checked program is
lower than rated torque. Note that overload warning is not shown even if maximum
torques of the other programs are higher than rated torque.
You must confirm that the maximum torque is lower than rated torque in all
programs you use. Please change setting of MOTN-171 in setup/accuracy table
screen from “NODISP” to “DEFAULT” if you want to enable overload warning
again.
Result shown in the screen that is displayed when the program running is not
correct. Please display screen again after the program to evaluate has ended.
- 68 -
Page 95

B-83284EN-2/05 11. GRAVITY COMPENSATION
11 GRAVITY COMPENSATION
Gravity compensation calculates the bending of the robot arm caused by the tool/work on the flange, the
equipment on the arm, and the self weight of the arm. Then it compensates the motor position depending on
the calculation of the bending, and it improves the absolute position accuracy.
To use this function, Gravity Compensation option (A05B-2600-J649) is required.
This function can not be used with Soft float (A05B-2600-J612).
11.1 SYSTEM VARIABLES
Gravity Compensation
$PARAM_GROUP[group].$SV_DMY_LNK[8]
[Name] Gravity Compensation Enable/Disable
[Meaning] TRUE Gravity Compensation Enable
FALSE Gravity Compensation Disable
Except some specific system configuration, Gravity Compensation is disabled when the robot is
shipped. To enable Gravity Compensation, set this variable to TRUE and cycle power.
To set back to be disabled, set this variable to FALSE and cycle power.
$PARAM_GROUP[group].$MOUNT_ANGLE
[Name] Mount Angle of Robot (Unit: deg)
[Meaning] Set 0 deg for floor mount type, 180 deg for upside down type, or the mount angle
for wall mount or angle mount type. Cycle power after setting.
11.2 MOTION SCREEN
1 Payload and armload (equipment on the arm) parameters are set in this screen.
2 This setting screen has three sub-screens. (MOTION screen / PAYLOAD SET screen / ARMLOAD
SET screen)
3 This screen is sub-screen in SYSTEM.
MOTION Screen (Default screen)
MOTION PERFORMANCE
Group1 1/10
No. PAYLOAD[kg] Comment
1 100.00 [ ]
2 120.00 [ ]
: : :
10 120.00 [ ]
Active PAYLOAD number = 1
[ TYPE ] GROUP DETAIL ARMLOAD SETIND >
4 Payload information (Schedule No.1 to 10) can be setup. Move cursor to the line of one of the
schedule numbers, and press F3, DETAIL to enter the payload set screen.
- 69 -
Page 96

11. GRAVITY COMPENSATION B-83284EN-2/05
PAYLOAD SET Screen
MOTION/PAYLOAD SET
1/8
Group 1
1 Schedule No[ 1]:[****************]
2 PAYLOAD [Kg] 100.00
3 PAYLOAD CENTER X [cm] 10.00
4 PAYLOAD CENTER Y [cm] 0.00
5 PAYLOAD CENTER Z [cm] 10.00
6 PAYLOAD INERTIA X [Kgfcms^2] 0.00
7 PAYLOAD INERTIA Y [Kgfcms^2] 0.00
8 PAYLOAD INERTIA Z [Kgfcms^2] 0.00
[ TYPE ] GROUP NUMBER DEFAULT HELP
5 Setup the payload, payload center, and payload inertia. X, Y, and Z directions in this screen mean X,
Y, and Z axes of the default (the settings are all 0) tool frame.
After the value is input, the message “Path and Cycle time will change. Set it ?” is displayed. Please
input F4, YES or F5, NO.
6 To enter the payload set screen of the other schedule number, press F3, NUMBER. To enter the screen
for other group, press F2, GROUP. (Only in the multi-group system)
7 Press [PREV] key to go back to the motion screen (default screen). Press F5, SETIND and input the
schedule number to use.
8 Press F4, ARMLOAD in the motion screen (default screen) to enter the armload set screen.
ARMLOAD SET Screen
MOTION/ARMLOAD SET
1/2
Group 1
1 ARM LOAD AXIS #1 [Kg] 20.00
2 ARM LOAD AXIS #3 [Kg] 10.00
[ TYPE ] GROUP DEFAULT HELP
9 Setup the armload on axis #1 and axis #3.
After the value is input, the message “Path and Cycle time will change. Set it ?” is displayed. Please
input F4, YES or F5, NO.
After setting up the armload, cycle power.
11.3 MASTERING
CAUTION
From R-30iB Controller, we can execute mastering even when Gravity
Compensation is ENABLED. Because the procedure has been changed from that
of R-30iA Controller, please read and understand this section before mastering
execution.
11.3.1 “Normal Mastering” and “GC Mastering”
You have 2 types of mastering method.
(1) Normal Mastering : Mastering with Gravity Compensation DISABLED
- 70 -
Page 97

B-83284EN-2/05 11. GRAVITY COMPENSATION
(2) GC Mastering : Mastering with Gravity Compensation ENABLED
• Basically you should choose the same method as the one which you have chosen at the previous
mastering. This is because the result of (1) and (2) is different from each other.
• Gravity Compensation works with either mastering result. But you can achieve better absolute
position accuracy with GC Mastering.
• If you switch the method from Normal Mastering to GC Mastering, TCP will shift a little. Therefore,
please confirm in advance that TCP shift will cause no problem. When you do mastering for switching,
use Vision Mastering or Jig Mastering (in other words, don’t use Single Axis Mastering). For details
of Vision Mastering, refer to “FANUC Robot series R-30iB/R-30iB Mate CONTROLLER
iRCalibration OPERATOR’S MANUAL” (B-83724EN).
Mastering method at the shipment of the robot
For some specific system configuration, GC Mastering has been done at the shipment of the robot. You can
find this information in the “Inspection Data Sheet” which is attached to your robot controller.
“Mastering with Gravity Compensation” in Inspection Data Sheet Mastering method at the shipment
“Yes” GC Mastering
“No” Normal Mastering
11.3.2 How to Choose Mastering Method
The following system variable indicates which mastering method the current mastering counts are derived
from.
$DMR_GRP[group].$GRAV_MAST
Value Description Mastering method you should choose
1
0
-1 Unknown (not set).
Current mastering data is
derived from GC Mastering.
Current mastering data is
derived from Normal Mastering.
• Choose GC Mastering.
• Basically, choose the Normal Mastering.
• If you need to improve absolute position accuracy, choose GC
Mastering.
• Choose the same one as “Mastering method at the shipment of
the robot” which is described above.
This system variable is updated every time you execute mastering.
11.3.3 Mastering Procedure
Mastering procedure for Normal Mastering
1 If Gravity Compensation is ENABLED, disable it.
2 Perform mastering.
3 If you have disabled Gravity Compensation in step 1, enable it again.
Mastering procedure for GC Mastering
1 Perform mastering with Gravity Compensation ENABLED.
* Please refer to the next subsection for guidance.
After mastering execution, record (write down) the value of $DMR_GRP[group].$GRAV_MAST together
with mastering counts ($DMR_GRP[group].$MASTER_COUN[ ]).
- 71 -
Page 98

11. GRAVITY COMPENSATION B-83284EN-2/05
NOTE
.When you use Gravity Compensation function, you must treat
$DMR_GRP[group].$GRAV_MAST as a part of mastering data. So please
remember to record (write down) the value of this system variable together with the
mastering counts. You need this value if we manually enter the mastering data to
system variable.
Example of mastering data
$DMR_GRP[1].$MASTER_CO UN [1] = 137859
.$MASTE R _ C OUN[2] = 22309853
.$MASTER_COUN[3] = 30596
.$MASTER_COUN[4] = 810348
.$MASTER_COUN[5] = 87291
.$MASTER_COUN[6] = 23124
$DMR_GRP[1].$GRAV_MAST = 1
In additi o n to $MASTER_COUN[ ],
$GRA V_M AST is also a part of
mastering data.
11.3.4 Guidance of GC Mastering
Keep the following rules of GC Mastering.
1 Before you perform GC Mastering, set correct payload parameters via MOTION screen.
2 When you write down joint angles of a reference position which will be used for mastering, do it under
the following condition;
- Gravity Compensation is ENABLED, and
- Calibration is completed, and
- Correct payload parameters are set.
3 When you perform Single Axis Master, keep the following rules;
• Just to be safe, write down the Mastering Data ($DMR_GRP[group].$MASTER_COUN[axis])
of all axes before you perform mastering.
• If there are more than one axes which need to be mastered, you must select and master them all at
once.
ex) Single Axis Master after J2, J4 and J5 motor replacement
You must master J2, J4 and J5 all at once.
You cannot do master solo J2 when J4 and J5 remain to be mastered.
* If you have no way to master multiple axes all at once, work around in the following way;
(NOTE: Master in ascending order. In other words, from robot base to flange)
(1) First, master J2, J4 and J5 all at once. You need to master J2 correctly. At this time, you
don’t need to master J4 and J5 correctly, but master them moderately correctly. In other
words, do temporary master for J4 and J5.
(2) Next, master J4 correctly.
(3) Finally, master J5 correctly.
• If you move no-need-master axes to the angle which you have wrote down for a reference
position in advance, do it after performing temporary mastering of need-master axes.
ex) Single Axis Master using reference angle of J1,J2,J4,J5,J6 after J3 motor replacement
(1) First, master J3 moderately correctly, then do CALIBRATE.
(2) Next, move no-need-master axes (J1,J2,J4,J5,J6) to the angle which you have wrote down
for a reference position.
(3) Finally, master J3 correctly.
• If you perform “mastering after temporary mastering” as described above, master count of the
axis which has an interaction with the target axis of mastering will change. This causes
unexpected position change. Therefore, after performing mastering, verify that master count of
no-need-master axis keeps the original value. If this value has been changed, enter the original
value which you have written down in advance.
- 72 -
Page 99

B-83284EN-2/05 12. OPERATION LOG BOOK
B
C
12 OPERATION LOG BOOK
Operation Log Book automatically records teach pendant operations and alarms in a buffer that can be
displayed in the Log Book menu of the teach pendant or saved as a text file. Some operations can include a
screen image to help in analyzing the event.
A system can have multiple Log Books and you can specify which events are recorded in each Log Book. In
this way, frequent and infrequent events can be recorded to separate Log Books.
When a Log Book buffer is full and a new record is added, the oldest record is deleted. The number of
events that can be stored in a Log Book buffer varies based on the type of events saved because not all
events are the same size. You can change the size of the buffer by setting a system variable.
To use function, Operation Log Book option (J695) is required.
Note : This function is independent of the password log function.
See the following example of a Log Book.
Log book
Operation ( 20.0 k) 1/790
1*SHIFT,F5(TOUCHUP) is pressed, line 2
2 '+Y^(J6)' is pressed
3 SHIFT+FWD is pressed
4*Select 'YES' in 'You are in the diff
5 SHIFT+FWD is pressed
6 SHIFT+FWD is pressed
7 Single step ON
8 'STEP' is pressed
9 'LINER' is selected
10*SHIFT,F1(POINT) is pressed line 2/2
11 '-Y^(J6)' is pressed
12*'50' is entered
13*'Cnt' is selected in 'Motion modify'
14*SHIFT,F1(POINT) is pressed, line 1/1
15 '-Y^(J2)' is pressed
16 '-Y^(J3)' is pressed
17 '+Y^(J5)' is pressed
18 '-Y^(J5)' is pressed
19 Override 40%
20 '+%' is pressed
21 Override 35%
22 '+%' is pressed
23 Override 30%
24 '+%' is pressed
25 Override 25%
26 '+%' is pressed
27 Override 20%
28 '+%' is pressed
29 Override 15%
30 '+%' is pressed
31 '-Y^(J5)' is pressed
32 'RESET' is pressed
33 Menu changed 'PNS0001'
34*'PNS0001' is entered
35*F2(CREATE) is pressed, line 1/16
36 Menu changed 'SELECT'
37 'SELECT' is pressed
[ TYPE ] [
OOK ]DETAIL
LEAR
The lines marked with an “*” have an associated screen image, as seen in the example of line 12 below. The
screen image shows the previous value of the changed item.
- 73 -
Page 100

12. OPERATION LOG BOOK B-83284EN-2/05
Log book
Operation ( 50.0 k) 12/790
50 is entered
10-JUL-21 16:16 :06
--Screen image---------------------------
PNS0001 LINE 0 \T2\ ABORTED
PNS0001\\\\\\\\\\\\\\\\\\\\\\\\ i
1/2
1:J P[1] 100% CNT100
[End]
General Limitations
Note the following general limitations for Log Book:
• Log Book does not support certain iPendant operations. See following examples.
- Selecting a link on a web page
- Operations in screens for iPendant only. For example, operations in browser, panel setup,
iPendant setup screen.
• Operations are not recorded in controlled start just after initial start. Cold start must be performed to
begin logging events.
• Operations in the configuration menu are not recorded.
• If you change the size of a log book, all data in the log book are lost.
• Some events are cyclically monitored for logging. Some of the following operations may not be
recorded if they occur faster than the monitoring cycle:
- Override (“Override x%”)
- Coordination (JOINT coordinate, User Coordinate etc.)
- Single step (Single step ON/OFF)
- Motion group (“Motion group x”)
- Sub group (“Sub group ROBOT/EXT”)
- User frame number (“User frame x”)
- Tool frame number (“Tool frame x”)
• If you change the dictionary, some entries in the LOG BOOK screen cannot be read. To read such log,
you must use the language that was used when the log was recorded.
• If passwords are enabled and $LOGBOOK.$LOG_ENT is a valid book number when you log in, your
password input is recorded as “’x’ is entered”. Passwords for other functions are also recorded. To
prevent passwords from being recorded, you can use screen filtering to filter out the screens that
contain passwords. Refer to Section 12.4 Operations.
• ‘y’ of “’x’ is selected in ‘y’ window” is based on the 1st line of prompt window. If the 1st line is blank,
y contains nothing. Please refer to screen image for analysis.
• If you press a function key that has no label, the key number followed by empty parentheses will be
recorded.
Example
If the function key line is as follows:
[ TYPE ] ON OFF
F3 has no label. If you press F3 and $LOGBOOK $LOG_FNKEY is a valid value, “F3( )” is
pressed” is recorded.
• If you change the remote TCP number in remote TCP jog mode, this is recorded as a change of user
frame.
• If you changed current JOG coordination by parameter instruction, the change is recorded when the
group is selected.
- 74 -
 Loading...
Loading...