

Page 1
Table of contents
Tables
Figures
Preface
Explanation of list of
parameters
1
SINUMERIK
SINUMERIK 828D,
SINAMICS S120
Parameter description
Parameter Manual
SINAMICS parameters
Parameters for data sets
Appendix
2
3
A
Validfor
SINUMERIK828Dcontrolsystem
Software version
CNCsoftware 4.5
SINAMICS S120 4.5
02/2012
6FC5397-8DP40-3BA0
Page 2
Legal information- Warning notice system
Legal information
Warning notice system
This manual contains notices you have to observe in order to ensure your personal safety, as well as to prevent
damage to property. The notices referring to your personal safety are highlighted in the manual by a safety alert
symbol, notices referring only to property damage have no safety alert symbol. These notices shown below are
graded according to the degree of danger.
DANGER
indicates that death or severe personal injury will result if proper precautions are not taken.
WARNING
indicates that death or severe personal injury may result if proper precautions are not taken.
CAUTION
with a safety alert symbol, indicates that minor personal injury can result if proper precautions are not taken.
CAUTION
without a safety alert symbol, indicates that property damage can result if proper precautions are not taken.
NOTICE
indicates that an unintended result or situation can occur if the relevant information is not taken into account.
If more than one degree of danger is present, the warning notice representing the highest degree of danger will be
used. A notice warning of injury to persons with a safety alert symbol may also include a warning relating to property
damage.
Qualified Personnel
The product/system described in this documentation may be operated only by personnel qualified for the specific
task in accordance with the relevant documentation, in particular its warning notices and safety instructions.
Qualified personnel are those who, based on their training and experience, are capable of identifying risks and
avoiding potential hazards when working with these products/systems.
Proper use of Siemens products
Note the following:
WARNING
Siemens products may only be used for the applications described in the catalog and in the relevant technical
documentation. If products and components from other manufacturers are used, these must be recommended or
approved by Siemens. Proper transport, storage, installation, assembly, commissioning, operation and
maintenance are required to ensure that the products operate safely and without any problems. The permissible
ambient conditions must be complied with. The information in the relevant documentation must be observed.
Trademarks
All names identified by ® are registered trademarks of SiemensAG. The remaining trademarks in this publication
may be trademarks whose use by third parties for their own purposes could violate the rights of the owner.
Disclaimer of Liability
We have reviewed the contents of this publication to ensure consistency with the hardware and software described.
Since variance cannot be precluded entirely, we cannot guarantee full consistency. However, the information in this
publication is reviewed regularly and any necessary corrections are included in subsequent editions.
Siemens AG
Industry Sector
Postfach 48 48
90026 NÜRNBERG
GERMANY
Order number:6FC5397-8DP40-3BA0
Ⓟ 02.2012 Technical data subject to change
Copyright © SiemensAG 2012.
All rights reserved
Page 3

Preface
SINUMERIK documentation
The SINUMERIK documentation is organized in the following categories:
• General documentation
• User documentation
• Manufacturer/service documentation
Additional information
You can find information on the following topics at www.siemens.com/motioncontrol/docu:
• Ordering documentation/overview of documentation
• Additional links to download documents
• Using documentation online (find and search in manuals/information)
Please send any questions about the technical documentation (e.g. suggestions for
improvement, corrections) to the following address:
docu.motioncontrol@siemens.com
My Documentation Manager (MDM)
Under the following link you will find information to individually compile OEM-specific
machine documentation based on the Siemens content:
www.siemens.com/mdm
Training
For information about the range of training courses, refer under:
• www.siemens.com/sitrain
SITRAIN - Siemens training for products, systems and solutions in automation
technology
• www.siemens.com/sinutrain
SinuTrain - training software for SINUMERIK
FAQs
You can find Frequently Asked Questions in the Service&Support pages under Product
Support. http://support.automation.siemens.com
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
3
Page 4

Preface
SINUMERIK
Target group
Benefits
Standard scope
You can find information on SINUMERIK under the following link:
www.siemens.com/sinumerik
This documentation is intended for project engineers, commissioning engineers, machine
operators and service and maintenance personnel.
The intended target group can use the Parameter Manual to test and commission the system
or the plant professionally and safely.
Utilization phase: Installation and commissioning phase
Technical Support
This documentation only describes the functionality of the standard version. Additions or
revisions made by the machine manufacturer are documented by the machine manufacturer.
Other functions not described in this documentation might be executable in the control. This
does not, however, represent an obligation to supply such functions with a new control or
when servicing.
For the sake of simplicity, this documentation does not contain all detailed information about
all types of the product and cannot cover every conceivable case of installation, operation, or
maintenance.
You will find telephone numbers for other countries for technical support in the Internet under
http://www.siemens.com/automation/service&support
Parameter description
4
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 5

Table of contents
Table of contents
Preface.........................................................................................................................................................3
1 Explanation of list of parameters .................................................................................................................7
1.1 Structure of the parameter descriptions for SINAMICS............................................................... 7
1.2 Meaning of the parameter descriptions ....................................................................................... 8
2 SINAMICS parameters .............................................................................................................................19
3 Parameters for data sets .........................................................................................................................853
3.1 Parameters for drive data sets (DDS) ..................................................................................... 853
3.2 What parameters are dependent on encoder data sets (EDS) ............................................... 857
3.3 Parameters for motor data sets (MDS).................................................................................... 859
A Appendix .................................................................................................................................................863
A.1 List of abbreviations................................................................................................................. 863
A.2 Documentation overview ......................................................................................................... 869
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
5
Page 6

Table of contents
Parameter description
6
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 7

Explanation of list of parameters
1.1 Structure of the parameter descriptions for SINAMICS
Basic structure of the parameter descriptions
The data in the following example has been chosen at random. The description of a
parameter includes as a maximum, the information listed below. Some of the information is
optional.
Example
The parameter list (see SINAMICS parameters (Page 19)) has the following structure:
--------------------------------------------- Start of the example --------------------------------------------------
----------------
1
Parameter
number
pxxxx[0…n]
Drive object
(function module)
Description: Text
Value: 0: Name and meaning of value 0
Recommendation: Text
Index: [0] = Name and meaning of bit 0
BICO: Full parameter name / abbreviated name
Can be changed
into: C1(x)
Data type:
Unsigned32
P group: Unit group: - Unit selection: p0100
Not for motor type:
FEM
Min. Max Factory setting
0.00 [Nm] 10.00. [Nm] 0.00 [Arms]
1: Name and meaning of value 1
2: Name and meaning of value 2
etc.
[1] = Name and meaning of bit 1
[2] = Name and meaning of bit 2
etc.
Calculated: - Access level: 2
Dynamic index: EDS,
p140
Scaling: p0200 Expert list: 1
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
7
Page 8
Explanation of list of parameters
1.2 Meaning of the parameter descriptions
Bit array: Bit signal name
[00] = Name and meaning of
bit 0
[01] = Name and meaning of
bit 1
[02] = Name and meaning of
bit 2
etc.
Dependency: Text
See also: pxxxx,rxxxx
See also: Fxxxxx, Axxxxx
Danger: Warning: Caution: Safety-related text with
Caution: Notice: Safety-related text
Note: Information which might be useful.
--------------------------------------------- End of the example ---------------------------------------------------
---------------
1 signal
Yes
Yes
Yes
0 signal
No
No
No
warning triangle
without warning triangle
FP
1.2 Meaning of the parameter descriptions
Parameter number
The parameter number consists of a leading "p" or "r", followed by the parameter number and
the index (optional).
Examples of the representation in the parameter list:
• p...
Adjustable parameter (read and write parameter)
• r...
Display parameters (read only)
• p0918
Adjustable parameter 918
• p0099[0...3]
Adjustable parameter 99, indices 0 to 3
• p1001[0...n]
Adjustable parameter 1001, indices 0 to n (n = configurable)
• r0944
Display parameter 944
Parameter description
8
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 9
Explanation of list of parameters
1.2 Meaning of the parameter descriptions
Other examples of the notation used in the documentation:
• p1070[1]
Adjustable parameter 1070, index 1
• p2098[1].3
Adjustable parameter 2098, index 1 bit 3
• r0945[2](3)
Display parameter 945, index 2 of drive object 3
• p0795.4
Adjustable parameter 795, bit 4
• r2129.0...15
Display parameter 2129 with bit array (maximum 16 bit)
The following applies to adjustable parameters:
The parameter value "when shipped" is specified under "Factory setting" with the relevant unit
in square parentheses. The value can be adjusted within the range defined by "Min" and
"Max".
The term "linked parameterization" is used in cases where changes to adjustable parameters
affect the settings of other parameters.
Linked parameterization is initiated, for example, as a result of the following actions and
parameters:
• Executing macros
p0015, p0700, p1000, p1500
• Setting a PROFIBUS telegram (BICO interconnections)
p0922
• Setting component lists
p0230, p0300, p0301, p0400
• Automatically calculating and preassigning
p0112, p0340, p0578, p3900
• Restore factory settings
p0970
The following applies to display parameters:
The fields "Min", "Max" and "Factory setting" are specified with a dash "-" and the relevant unit
in square parentheses.
Note
The parameter list can contain parameters that are not visible in the expert lists of the
respective commissioning software (e.g. parameters for trace functions)
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
9
Page 10
Explanation of list of parameters
1.2 Meaning of the parameter descriptions
BICO: Full parameter name / abbreviated name
The following abbreviations can appear in front of the parameter name:
• BI: Binector Input Binector Input
This parameter selects the source of a digital signal.
• BO: Binector Output Binector Output
This parameter is available as a digital signal for interconnection with other parameters.
• CI: Connector Input Connector Input
This parameter selects the source of an "analog" signal.
• CO: Connector Output Connector Output
This parameter is available as an "analog" signal for interconnection with other
parameters.
• CO/BO: Connector/Binector Output Connector/Binector Output
This parameter is available as both an "analog" and a digital signal for interconnection with
other parameters.
Note
A Connector Input (CI) cannot be interconnected with just any Connector Output (CO,
signal source).
When interconnecting a connector input using the commissioning software, only the
signal sources that are actually possible are listed.
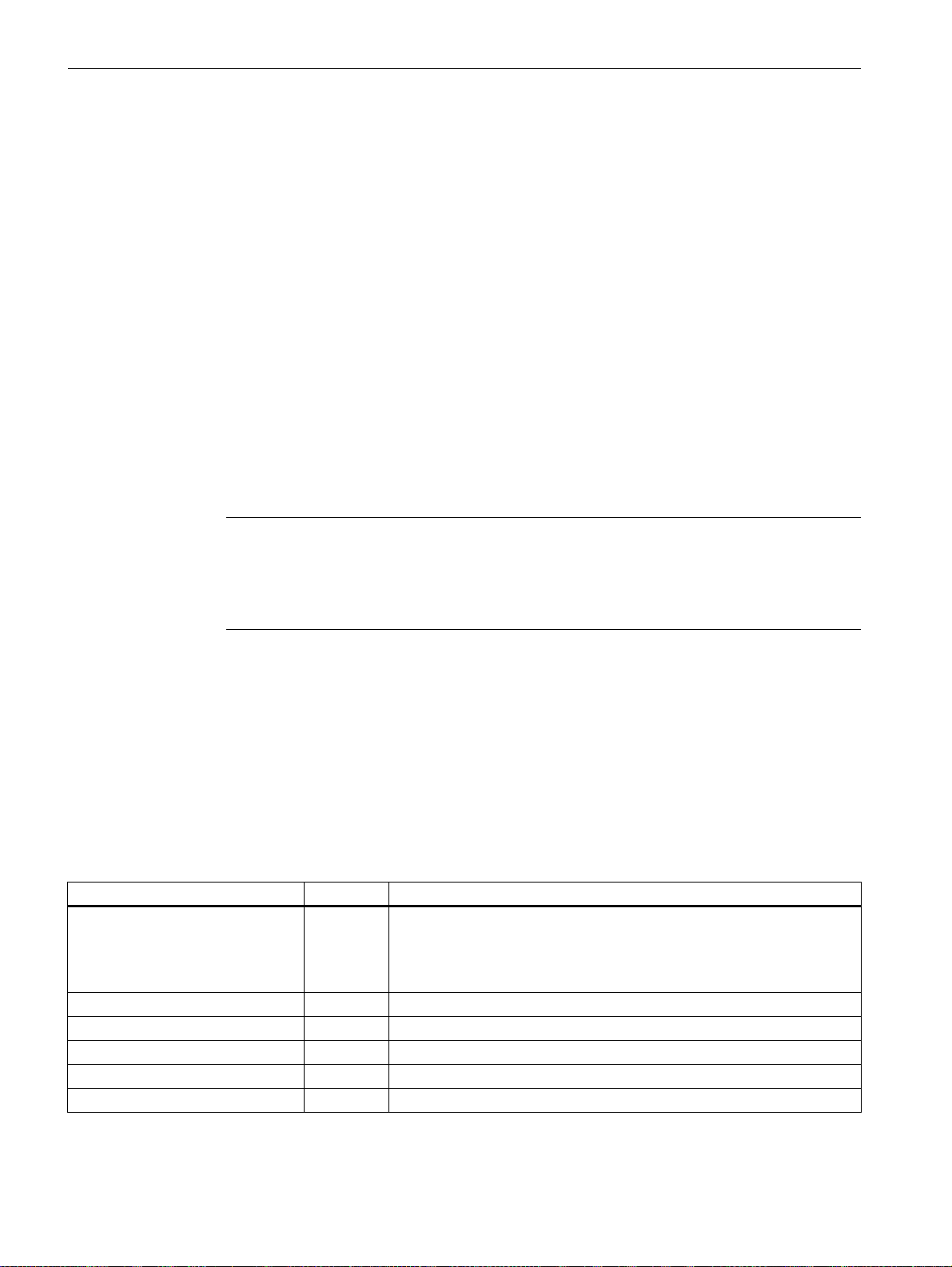
Drive object (function module)
A drive object (DO) is an independent, "self-contained" functional unit with its own
parameters, faults messages, and alarms.
For each parameter, it is specified in which drive object this parameter is located and for
which function module.
A parameter can belong to a single, multiple, or all drive objects.
The following information relating to "Drive object" and "Function module" can be displayed
under the parameter number:
Drive object (function module) Type Meaning
A_INF_828 103 Active Infeed closed-loop control
Closed-loop controlled, self-commutated infeed/regenerative feedback
unit for generating
a constant DC-link voltage.
A_INF_828 (line transformer) Active Infeed closed-loop control with "line transformer" function module
A_INF_828 (Brk Mod Ext) Active Infeed closed-loop control with "Brk Mod Ext?" function module
A_INF_828 (Master/Slave) Active Infeed closed-loop control with "Master/Slave" function module
A_INF_828 (Parallel) Active Infeed closed-loop control with "Parallel?" function module
A_INF_828 (Recooling unit) Active Infeed closed-loop control with "Cooling unit" function module
10
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 11
Explanation of list of parameters
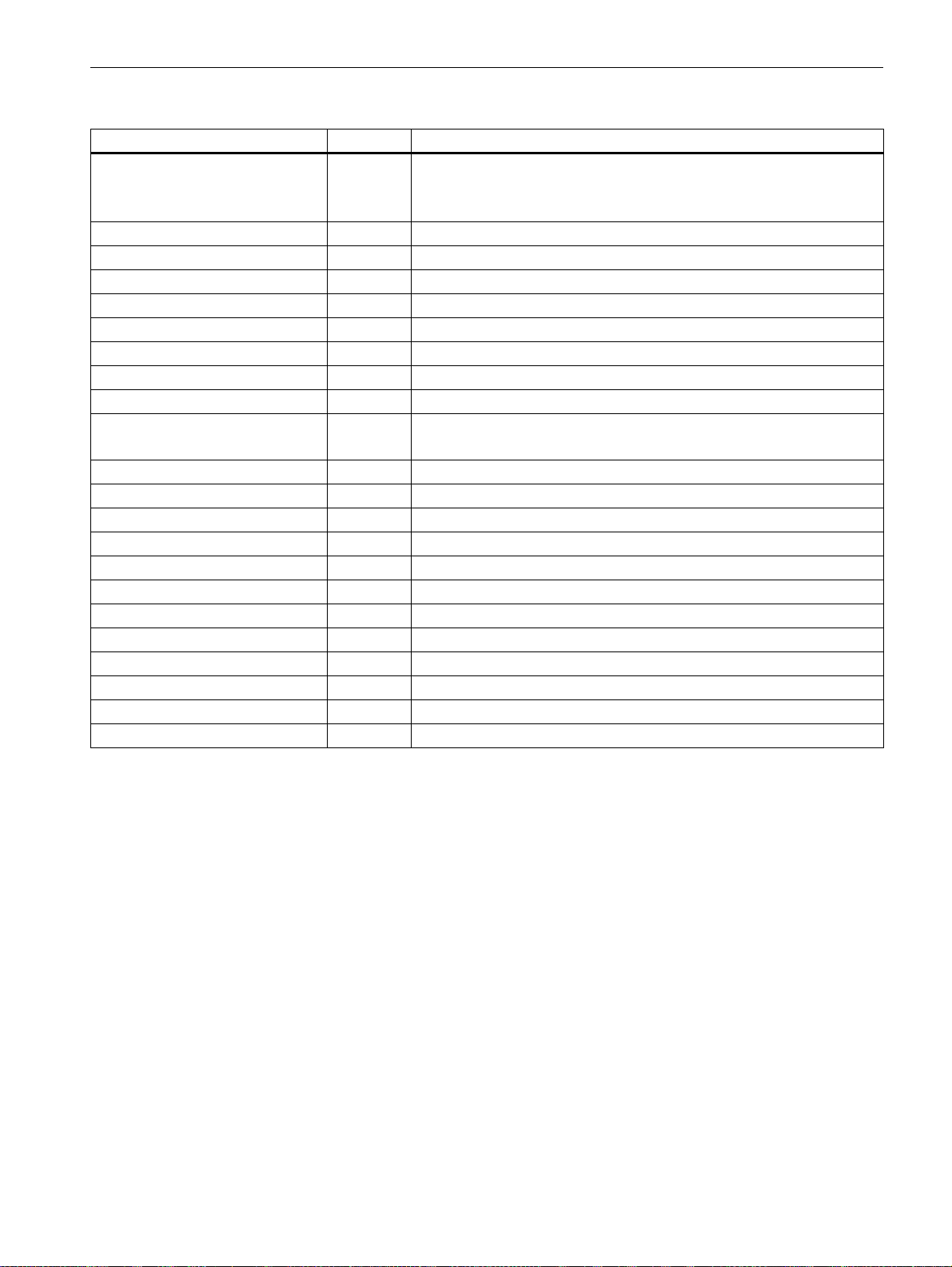
1.2 Meaning of the parameter descriptions
Drive object (function module) Type Meaning
B_INF_828 103 Basic Infeed closed loop control
Uncontrolled infeed unit (without energy recovery) to
rectify the line voltage for the DC link.
B_INF_828 (Brk Mod Ext) Basic Infeed closed-loop control with "Brk Mod Ext?" function module
B_INF_828 (Parallel) Basic Infeed closed-loop control with "Parallel?" function module
Basic Infeed closed-loop control with "Cooling unit" function module
CU_I_COMBI 102 Control Unit SINAMICS Integrated Combi
CU_I_828 103 Control Unit SINAMICS Integrated Booksize
CU_LINK 254 Object for Controller Extension 32 (CX32)
CU_NX_828 103
HUB 150 DMC20 DRIVE-CLiQ Hub Module
SERVO_COMBI 102 Servo drive
SERVO_COMBI (Safety rot) Servo drive with "Safety rot?" function module
SERVO_828 103 Servo drive
SERVO_828 (Safety rot) Servo drive with "Safety rot?" function module
SI_INF_COMBI 102
SI_INF_COMBI (Brk Mod Ext)
S_INF_828 (Parallel)
S_INF_828 103
S_INF_828 (Brk Mod Ext)
S_INF_828 (Recooling unit)
TM120 207 Terminal Module 120
TM54F_MA 205 Terminal Module 54F Master
TM54F_SL 206 Terminal Module 54F Slave
Can be changed
A "-" character indicates that the parameter can be changed in any object state and that the
change will become effective immediately.
The information "C1(x), C2(x), T, U" ((x): optional) means that the parameter can be changed
only in the specified drive object state and that the change will not take effect until the object
switches to another state. This can be one or more states.
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
11
Page 12
Explanation of list of parameters
1.2 Meaning of the parameter descriptions
The following states may be specified:
• C1(x) Device commissioning C1: Commissioning 1
The device is being commissioned (p0009>0).
Pulses cannot be enabled.
The parameter can only be changed when the device commissioning
settings (p0009>0) are as follows:
• C1: Can be changed for all settings p0009>0.
• C1(x): Can only be changed when the settings are p0009 = x.
A modified parameter value does not take effect until the device
commissioning mode is exited with p0009 = 0.
• C2(x) Drive object commissioning C2: Commissioning 2
The drive is being commissioned (p0009=0 and p0010>0).
Pulses cannot be enabled.
The parameter can only be changed when the drive commissioning
settings (p0010>0) are as follows:
• C2: Can be changed for all settings p0010>0.
• C2(x): Can only be changed when p0010 = x.
A modified parameter value does not take effect until the device
commissioning mode is exited with p0010 = 0.
•U Run U: Run
Pulses are enabled.
• T Ready to run T: Ready to run
The pulses are not enabled and the status "C1(x)" or "C2(x)" is not active.
Calculated
Note
Parameter p0009 is CU specific (belongs to Control Unit).
Parameter p0010 is drive specific (belongs to each drive object).
The operating state of individual drive objects is displayed in r0002.
Specifies whether the parameter is influenced by automatic calculations.
The calculation attribute defines which activities influence the parameter.
The following attributes apply:
• CALC_MOD_ALL
– p0340 = 1
– Project download with commissioning software and send from p0340 = 3
• CALC_MOD_CON
– p0340 = 4
• CALC_MOD_EQU
– p0340 = 2
12
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 13
Access level
Explanation of list of parameters
1.2 Meaning of the parameter descriptions
• CALC_MOD_LIM_REF
– p0340 = 1, 3, 5
– p0578 = 1
• CALC_MOD_REG
– p0340 = 1, 3
Note
For p3900 > 0, p0340 = 1 is also called automatically.
After p1910 = 1, p0340 = 3 is automatically called.
Specifies the access level required so that the parameter can be displayed and/or modified.
The required access level can be set via parameter p0003.
The system uses the following access levels:
Data types
1 = Standard
2 = Extended
3 = Expert
4 = Service
Please contact your local Siemens office for the password for parameters with access
level4 (Service).
Note
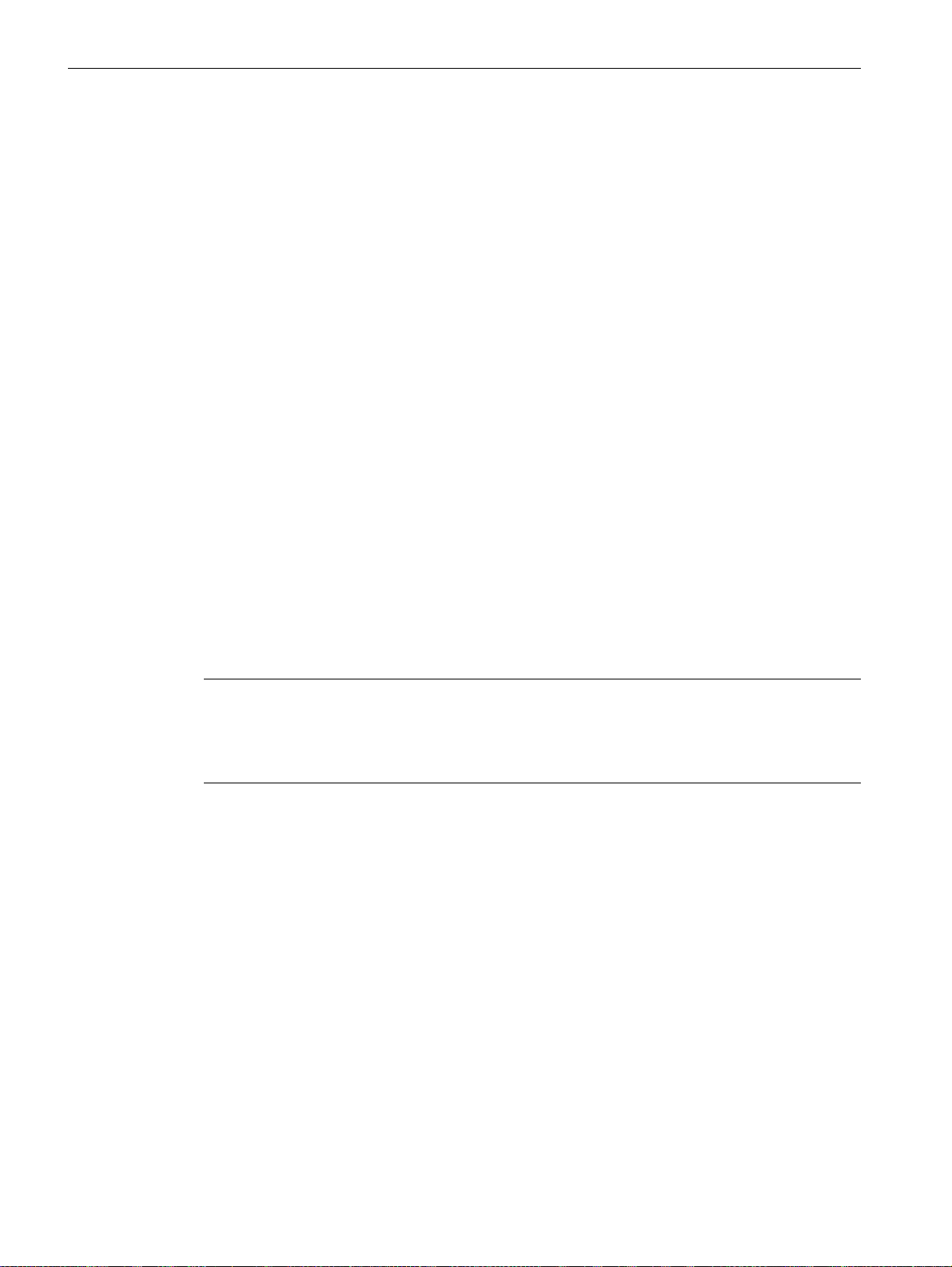
Parameter p0003 is CU-specific (available on the Control Unit).
The information on the data type can consist of the following two items (separated by a
slash):
• First item
Data type of the parameter
• Second item (for binector or connector input only)
Data type of the signal source to be interconnected (binector/connector output)
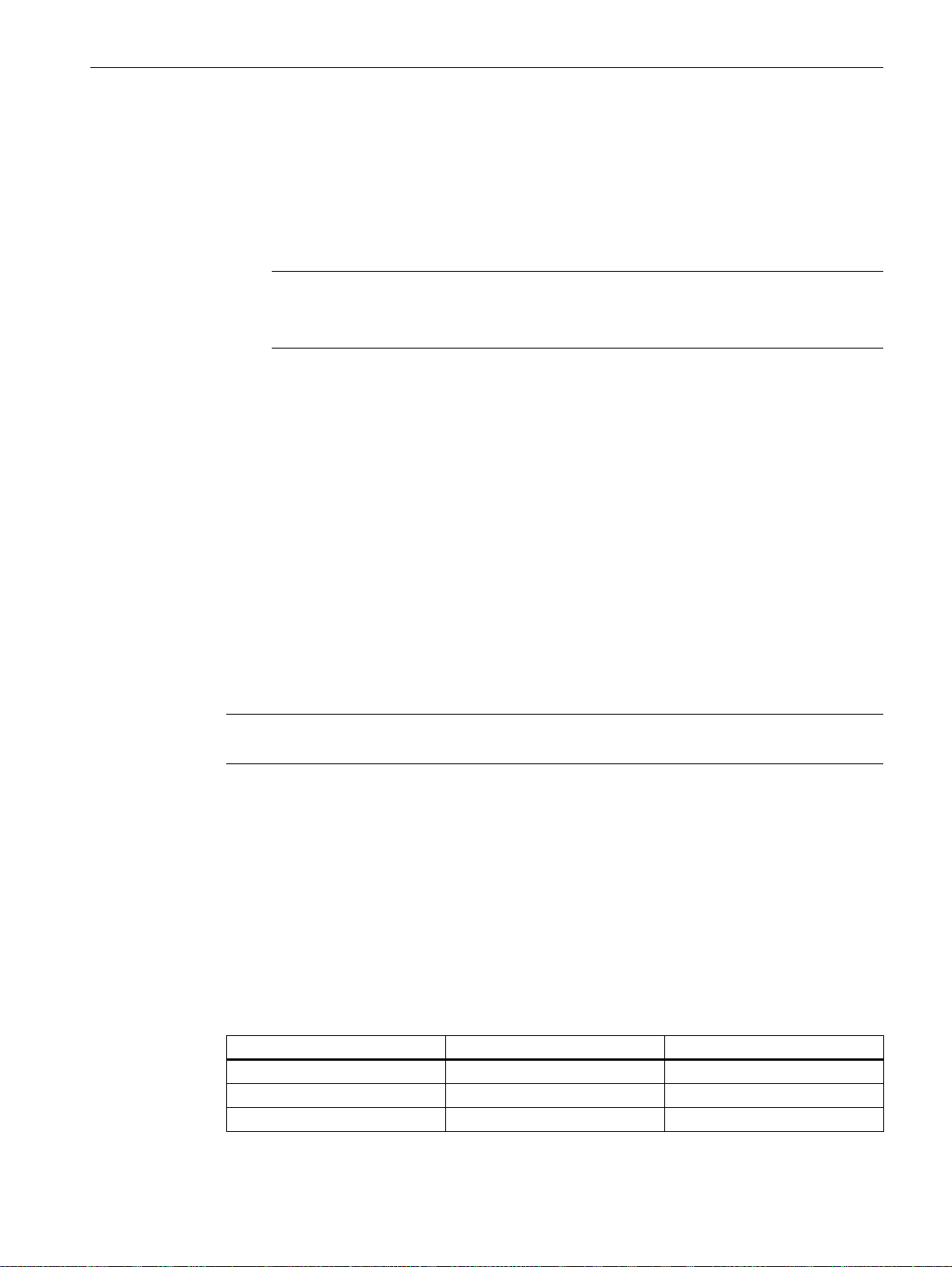
Parameters can have the following data types:
Data type (abbreviated name) Data type (full name) Meaning
I8 Integer8 8-bit integer number
I16 Integer16 16-bit integer number
I32 Integer32 32-bit integer number
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
13
Page 14
Explanation of list of parameters
1.2 Meaning of the parameter descriptions
Data type (abbreviated name) Data type (full name) Meaning
U8 Unsignet8 8 bits without sign
U16 Unsignet16 16 bits without sign
U32 Unsigned32 32 bits without sign
Float FloatingPoint32 32-bit floating point number
Dynamic index
For parameters with a dynamic index [0 to n], the following information is specified here:
• Data set (if this is available).
• Parameter for the number of indices (n = number - 1).
The following information can be contained in this field:
• "CDS, p0170" (Command Data Set, CDS count)
Example:
p1070[0] -> main setpoint [command data set 0]
p1070[1] -> main setpoint [command data set 1], etc.
• "DDS, p0180" (Drive Data Set, DDS count)
• "EDS, p0140" (Encoder Data Set, EDS count)
• "MDS, p0130" (Motor Data Set, MDS count)
• "PDS, p0120" (Power unit Data Set, PDS count)
• "p2615" (traversing blocks count)
Note
Information on the data sets can be taken from the following references:
/FH1/ SINAMICS S120 Function Manual Drive Functions Chapter "Data Sets"
P group (only when accessing via BOP (Basic Operator Panel))
Specifies the functional group to which the parameter belongs. The required parameter group
can be set via p0004.
Unit, unit group and unit selection
The standard unit of a parameter is specified in square parentheses after the values for "Min",
"Max", and "Factory setting".
14
For parameters where the unit can be changed, "Unit Group" and "Unit Selection" specify
which group this parameter belongs and which parameter can be used to change the unit.
Example:
Unit group: 7_1, Unit selection: p0505
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 15
The parameter belongs to Unit Group 7_1 and the unit can be changed using p0505.
Parameter values
• Min.
• Max
• Factory setting
Explanation of list of parameters
1.2 Meaning of the parameter descriptions
Note
Detailed information on changing units can be found in the following references:
/FH1/SINAMICS S120 Function Manual
/BA3/SINAMICS S150 Operating Instructions
Minimum value of the parameter [unit]
Maximum value of the parameter [unit]
Value when delivered [unit]
When commissioned for the first time, it is possible that another value is visible for certain
parameters (e.g.p1800).
Not for motor type
Specifies for which motor type this parameter has no significance
ASM: Asynchronous motor (induction motor)
FEM: Separately excited synchronous motor
PEM: Permanent-magnet synchronous motor
REL: Reluctance motor/SIEMOSYN motor
Scaling
Specification of the reference variable with which a signal value is automatically converted for
a BICO interconnection.
The following reference variables are possible:
• p2000 ... p2007: Reference speed, reference voltage, etc.
• TEMP: 100 °C = 100 %
Reason:
The setting of these parameters is determined by the operating environment of the Control
Unit (e.g.depending on the device type, macro, Power Module).
• PERCENT: 1.0 = 100 %
• 4000H: 4000 hex = 100 %
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
15
Page 16

Explanation of list of parameters
1.2 Meaning of the parameter descriptions
Expert list
Specifies whether this parameter is available in the expert list of the specified drive objects in
the commissioning software.
• 1: Parameter does exist in the expert list.
• 0: Parameter does not exist in the expert list.
NOTICE
Users assume full responsibility for using parameters marked "Expert list: 0" (parameter
does not exist in the expert list).
These parameters and their functionalities have not been tested and no further user
documentation is available for them (e.g. description of functions).
Further, for these parameters, support through "Technical Support" (hotline) is no longer
guaranteed.
Description
Explanation of the function of a parameter.
Values
Lists the possible values of a parameter.
Recommendation
Information about recommended settings.
Index
The name and meaning of each individual index are specified for indexed parameters.
The following applies to the values (Min, Max, Factory setting) of indexed adjustable
parameters:
• Min, Max:
• Factory setting:
The adjustment range and unit apply to all indices.
When all indices have the same factory setting, index 0 is specified with the unit to
represent all indices.
When the indices have different factory settings, they are all listed individually with the
unit.
16
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 17

Bit array
Dependency
Explanation of list of parameters
1.2 Meaning of the parameter descriptions
For parameters with bit arrays, the following information is provided about each bit:
• Bit number and signal name
• Meaning with signal states 0 and 1
Conditions that must be fulfilled in conjunction with this parameter.
Also includes special effects that can occur between this parameter and others.
See also: List of other additional parameters to be considered.
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
17
Page 18

Explanation of list of parameters
1.2 Meaning of the parameter descriptions
18
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 19
SINAMICS parameters
Product: 828D COMBI, Version: 4502400, Language: eng
Objects: A_INF_828, B_INF_828, CU_I_828, CU_I_COMBI, CU_LINK, CU_NX_828, HUB, S_INF_828, S_INF_COMBI, SERVO_828, SERVO_COMBI,
TM120, TM150, TM54F_MA, TM54F_SL
r0002 Infeed operating display / INF op_display
A_INF_828,
S_INF_828,
S_INF_COMBI
Description: Operating display for the infeed.
Value: 0: Operation - everything enabled
Dependency: Refer to: r0046
Notice: For several missing enable signals, the corresponding value with the highest number is displayed.
Note: OC: Operating condition
Can be changed: - Calculated: - Access level: 1
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 250 -
21: Ready for operation - set "Operation enable" = "1" (p0852)
31: Rdy for sw on - pre-chrg running (p0857)
32: Ready for switching on - set "ON/OFF1" = "0/1" (p0840)
35: Switching on inhibited - carry out first commissioning (p0010)
41: Switching on inhibited - set "ON/OFF1" = "0" (p0840)
42: Switching on inhibited - set "OC/OFF2" = "1" (p0844, p0845)
44: Switching on inhibited - connect 24 V to terminal EP (hardware)
45: Switching on inhibited - remove fault cause, acknowledge fault
46: Switching on inhibited - exit comm mode (p0009, p0010)
60: Infeed de-activated/not operational
70: Initialization
200: Wait for booting/partial booting
250: Device signals a topology error
EP: Enable Pulses (pulse enable)
COMM: Commissioning
2
r0002 Infeed operating display / INF op_display
B_INF_828 Can be changed: - Calculated: - Access level: 1
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 250 -
Description: Operating display for the infeed.
Value: 0: Operation - everything enabled
31: Rdy for sw on - pre-chrg running (p0857)
32: Ready for switching on - set "ON/OFF1" = "0/1" (p0840)
35: Switching on inhibited - carry out first commissioning (p0010)
41: Switching on inhibited - set "ON/OFF1" = "0" (p0840)
42: Switching on inhibited - set "OC/OFF2" = "1" (p0844, p0845)
44: Switching on inhibited - connect 24 V to terminal EP (hardware)
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
19
Page 20
SINAMICS parameters
45: Switching on inhibited - remove fault cause, acknowledge fault
46: Switching on inhibited - exit comm mode (p0009, p0010)
60: Infeed de-activated/not operational
70: Initialization
200: Wait for booting/partial booting
250: Device signals a topology error
Dependency: Refer to: r0046
Notice: For several missing enable signals, the corresponding value with the highest number is displayed.
Note: OC: Operating condition
COMM: Commissioning
r0002 Control Unit operating display / CU op_display
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: Operating display for the Control Unit (CU).
Value: 0: Operation
Notice: For several missing enable signals, the corresponding value with the highest number is displayed.
Can be changed: - Calculated: - Access level: 1
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 117 -
10: Ready
20: Wait for run-up
25: Wait for automatic FW update of DRIVE-CLiQ components
31: Commissioning software download active
33: Remove/acknowledge topology error
34: Exit commissioning mode
35: Carry out first commissioning
70: Initialization
80: Reset active
99: Internal software error
101: Specify topology
111: Insert drive object
112: Delete drive object
113: Change drive object number
114: Change component number
115: Run parameter download
117: Delete component
r0002 DRIVE-CLiQ Hub Module operating display / Hub op_display
HUB Can be changed: - Calculated: - Access level: 1
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 250 -
Description: Operating display for the DRIVE-CLiQ Hub Module.
Value: 0: Module in cyclic operation
Notice: For several missing enable signals, the corresponding value with the highest number is displayed.
20
40: Module not in cyclic operation
50: Alarm
60: Fault
70: Initialization
120: Module de-activated
200: Wait for booting/partial booting
250: Device signals a topology error
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 21
SINAMICS parameters
r0002 Drive operating display / Drv op_display
SERVO_828,
SERVO_COMBI
Description: Operating display for the drive.
Value: 0: Operation - everything enabled
Dependency: Refer to: r0046
Notice: For several missing enable signals, the corresponding value with the highest number is displayed.
Note: OC: Operating condition
Can be changed: - Calculated: - Access level: 1
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 250 -
10: Operation - set "enable setpoint" = "1" (p1142, p1152)
11: Operation - set "enable speed controller" = "1" (p0856)
12: Operation - RFG frozen, set "RFG start" = "1" (p1141)
13: Operation - set "enable RFG" = "1" (p1140)
14: Oper. - MotID, excit. running and/or brake opens, SS2, SOS
15: Operation - open brake (p1215)
16: Operation - withdraw braking with OFF1 using "ON/OFF1" = "1"
17: Operation - braking with OFF3 can only be interrupted with OFF2
18: Operation - brake on fault, remove fault, acknowledge
19: Operation - armature short-circ./DC brake act. (p1230, p1231)
21: Ready for operation - set "Operation enable" = "1" (p0852)
22: Ready for operation - de-magnetizing running (p0347)
23: Ready for operation - set "Infeed operation" = "1" (p0864)
31: Ready for switching on - set "ON/OFF1" = "0/1" (p0840)
35: Switching on inhibited - carry out first commissioning (p0010)
41: Switching on inhibited - set "ON/OFF1" = "0" (p0840)
42: Switching on inhibited - set "OC/OFF2" = "1" (p0844, p0845)
43: Switching on inhibited - set "OC/OFF3" = "1" (p0848, p0849)
44: Switching on inhibited - connect 24 V to terminal EP (hardware)
45: Switching on inhibited - rectify fault, acknowledge fault, STO
46: Switching on inhibited - exit comm mode (p0009, p0010)
60: Drive object de-activated/not operational
70: Initialization
200: Wait for booting/partial booting
250: Device signals a topology error
EP: Enable Pulses (pulse enable)
RFG: Ramp-function generator
COMM: Commissioning
MotID: Motor data identification
SS2: Safe Stop 2
SOS: Safe Operating Stop
STO: Safe Torque Off
r0002 TM120 operating display / TM120 op_display
TM120 Can be changed: - Calculated: - Access level: 1
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 250 -
Description: Operating display for Terminal Module 120 (TM120)
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
21
Page 22
SINAMICS parameters
Value: 0: Module in cyclic operation
Notice: For several missing enable signals, the corresponding value with the highest number is displayed.
40: Module not in cyclic operation
50: Alarm
60: Fault
70: Initialization
120: Module de-activated
200: Wait for booting/partial booting
250: Device signals a topology error
r0002 TM150 operating display / TM150 op_display
TM150 Can be changed: - Calculated: - Access level: 1
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 250 -
Description: Operating display for Terminal Module 150 (TM150)
Value: 0: Module in cyclic operation
Notice: For several missing enable signals, the corresponding value with the highest number is displayed.
40: Module not in cyclic operation
50: Alarm
60: Fault
70: Initialization
120: Module de-activated
200: Wait for booting/partial booting
250: Device signals a topology error
r0002 TM54F operating display / TM54F op_display
TM54F_MA,
TM54F_SL
Description: Operating display for Terminal Module 54F (TM54F).
Value: 0: Module in cyclic operation
Can be changed: - Calculated: - Access level: 1
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 250 -
40: Module not in cyclic operation
50: Alarm
60: Fault
70: Initialization
120: Module de-activated
200: Wait for booting/partial booting
250: Device signals a topology error
p0003 BOP access level / BOP acc_level
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: Sets the access level for reading and writing parameters via the Basic Operator Panel (BOP).
Can be changed: C1, U, T Calculated: - Access level: 1
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 0
Min Max Factory setting
1 4 1
22
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 23
SINAMICS parameters
Value: 1: Standard
Note: Access level 1 (standard):
2: Extended
3: Expert
4: Service
Parameters for simplest possible operations.
Access level 2 (extended):
Parameters to operate the basic functions of the drive unit.
Access level 3 (experts):
Expert know-how is required for these parameters (e.g. BICO parameterization).
Access level 4 (service):
For these parameters, it is necessary that authorized service personnel enter the appropriate password (p3950).
p0005[0...1] BOP operating display selection / BOP op_disp sel
HUB, TM120,
TM150, TM54F_MA,
TM54F_SL
Description: Sets the parameter number and parameter index for display for p0006 = 2, 4 for the Basic Operator Panel (BOP).
Index: [0] = Parameter number
Dependency: Refer to: p0006
Note: Procedure:
Can be changed: U, T Calculated: - Access level: 2
Data type: Unsigned16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 65535 [0] 2
[1] 0
Examples for the SERVO drive object:
p0005[0] = 21, p0005[1] = 0: Actual speed smoothed (r0021)
p0005[0] = 25, p0005[1] = 0: Output voltage smoothed (r0025)
[1] = Parameter index
1.
The parameter number to be displayed should be set in index 0. Only the monitoring parameters (read-only parameters) can be set that actually exist for the actual drive object.
If the set parameter number is not indexed, or if there is an index in index 1 that lies outside the valid range of the set
parameter, then index 1 is automatically set to 0.
2.
The index that belongs to the parameter set in index 0 should be set in index 1. The permissible changes in index 1
always depend on the parameter number set in index 0.
p0006 BOP operating display mode / BOP op_ disp mode
HUB, TM120,
TM150, TM54F_MA,
TM54F_SL
Description: Sets the mode of the operating display for the Basic Operator Panel (BOP) in the operating states "ready for operation"
Value: 4: p0005
Dependency: Refer to: p0005
Note: Mode 0 ... 3 can only be selected if also r0020, r0021 are available on the drive object.
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Can be changed: U, T Calculated: - Access level: 3
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
4 4 4
and "operation".
Mode 4 is available for all drive objects.
23
Page 24

SINAMICS parameters
p0009 Device commissioning parameter filter / Dev comm par_filt
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: Sets the device and basic drive commissioning.
Value: 0: Ready
Notice: For p0009 = 10000 the following applies:
Note: The drives can only be powered up outside the device commissioning (the inverter enabled). In this case, p0009 must
Can be changed: C1, T Calculated: - Access level: 1
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 10000 1
By appropriately setting this parameter, those parameters are filtered that can be written into in the various commissioning steps.
1: Device configuration
2: Defining the drive type/function module
3: Drive base configuration
4: Data set base configuration
29: Device download
30: Parameter reset
50: OA application configuration
55: OA application installation
101: Topology input
111: Insert drive object
112: Delete drive object
113: Change drive object number
114: Change component number
115: Parameter download
117: Delete component
10000: Ready (asynchron)
After the value has been modified, no further parameter modifications can be made and the status is shown in r3996.
Modifications can be made again when r3996 = 0.
be 0 (Ready) and the individual drive objects must have already gone into operation (p0010).
p0009 = 1: Device configuration
At the first commissioning of the device, after booting, the device is in the "device configuration" state. To start the
internal automatic first commissioning of the drive unit, p0009 should be set to 0 (Ready) after the ID for the actual
topology (r0098) was transferred into the ID for the target topology (p0099). To do this, it is sufficient to set a single
index value of p0099[x] the same as r0098[x]. Before the device has been completely commissioned, no other parameter can be changed. After the first commissioning was carried out, in this state, when required, other basic device configuration parameters can be adapted (e.g. the basic sampling time in p0110).
p0009 = 2: Defines the drive type / function module
In this state, the drive object types and/or the function modules can be changed or selected for the individual drive
objects. To do this, the drive object type can be set using p0107[0...15] and the function can be set using p0108[0...15]
(refer to p0101[0...15]).
p0009 = 3: Drive basic configuration
In this state, after the device has been commissioned for the first time, basic changes can be made for the individual
drive objects (e.g. sampling times in p0111, p0112, p0115 and the number of data sets in p0120, p0130, p0140,
p0170, p0180).
p0009 = 4: Data set basic configuration
In this state, after the device has been commissioned for the first time, for the individual drive objects changes can be
made regarding the assignment of the components (p0121, p0131, p0141, p0151, p0161) to the individual data sets
and the assignment of the power unit, motor and encoder to the drive data sets (p0185, ...).
p0009 = 29: Device download
If a download is made using the commissioning software, the device is automatically brought into this state. After the
download has been completed, p0009 is automatically set to 0 (ready). It is not possible to manually set p0009 to this
value.
24
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 25
SINAMICS parameters
p0009 = 30: Parameter reset
In order to bring the complete unit into the "first commissioning" state or to load the parameters saved using p0977, to
start, p0009 must be set to this value. p0976 can then be changed to the required value.
p0009 = 50: OA application configuration
In this state, after the device has been commissioned for the first time, changes can be made for the individual drive
objects regarding the activity (p4956) of the OA applications.
p0009 = 55: OA application installation
OA applications can be installed and/or uninstalled in this state.
p0009 = 101: Topology input
In this state, the DRIVE-CLiQ target topology can be entered using p9902 and p9903.
p0009 = 111: Insert drive object
This state allows a new drive object to be inserted using p9911.
p0009 = 112: Delete drive object
This state allows existing drive objects to be deleted using p9912 after the device has been commissioned for the first
time.
p0009 = 113: Change drive object number
This state allows the drive object number of existing drive objects to be changed using p9913 after the device has been
commissioned for the first time.
p0009 = 114: Change component number
This state allows the component number of existing components to be changed using p9914 after the device has been
commissioned for the first time.
p0009 = 115: Parameter download
This state allows the complete device and drive commissioning using the parameter services.
p0009 = 117: Delete component
This state allows components to be deleted using p9917 after the device has been commissioned for the first time.
p0010 Infeed commissioning parameter filter / INF comm par_filt
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI
Description: Sets the parameter filter to commission an infeed unit.
Value: 0: Ready
Note: The drive can only be powered up outside the drive commissioning (inverter enable). To realize this, this parameter
Can be changed: C2(1), T Calculated: - Access level: 1
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 30 1
Setting this parameter filters out the parameters that can be written into in the various commissioning steps.
1: Quick commissioning
2: Power unit commissioning
5: Technological application/units
29: Only Siemens int
30: Parameter reset
must be set to 0.
For p3900 not equal to 0, at the end of the quick commissioning, this parameter is automatically reset to 0.
Procedure for "Reset parameter": Set p0010 to 30 and p0970 to 1.
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
25
Page 26
SINAMICS parameters
p0010 Drive commissioning parameter filter / Drv comm. par_filt
SERVO_828,
SERVO_COMBI
Description: Sets the parameter filter to commission a drive.
Value: 0: Ready
Notice: For p0010 = 10000 the following applies:
Note: The drive can only be powered up outside the drive commissioning (inverter enable). To realize this, this parameter
Can be changed: C2(1), T Calculated: - Access level: 1
Data type: Integer16 Dynamic index: - Func. diagram: 2800, 2846
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 10000 1
Setting this parameter filters out the parameters that can be written into in the various commissioning steps.
1: Quick commissioning
2: Power unit commissioning
3: Motor commissioning
4: Encoder commissioning
5: Technological application/units
15: Data sets
17: Basic positioner commissioning
25: Position control commissioning
29: Only Siemens int
30: Parameter reset
95: Safety Integrated commissioning
10000: Ready with immediate feedback signal
After the value has been modified, no further parameter modifications can be made and the status is shown in r3996.
Modifications can be made again when r3996 = 0.
must be set to 0.
By setting p3900 to a value other than 0, the quick commissioning is completed, and this parameter is automatically
reset to 0.
Procedure for "Reset parameter": Set p0010 to 30 and p0970 to 1.
p0010 = 10000 corresponds to p0010 = 0. Unlike with p0010 = 0, the parameter modification is applied immediately
and the calculations are made in the background. Further parameter modifications cannot be made while the calculations are being performed.
p0010 TM120 commissioning parameter filter / TM120 com par_filt
TM120 Can be changed: C2(1), T Calculated: - Access level: 1
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 30 0
Description: Sets the parameter filter for commissioning a Terminal Module 120 (TM120).
Setting this parameter filters out the parameters that can be written into in the various commissioning steps.
For the BOP, this setting also causes the read access operations to be filtered.
Value: 0: Ready
29: Only Siemens int
30: Parameter reset
Dependency: Refer to: p0970
Note: Only the following values are possible: p0010 = 0, 30
Procedure for "Reset parameter": Set p0010 to 30 and p0970 to 1.
Parameter description
26
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 27
SINAMICS parameters
p0010 TM150 commissioning parameter filter / TM150 com par_filt
TM150 Can be changed: C2(1), T Calculated: - Access level: 1
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 30 0
Description: Sets the parameter filter for commissioning a Terminal Module 150 (TM150).
Setting this parameter filters out the parameters that can be written into in the various commissioning steps.
For the BOP, this setting also causes the read access operations to be filtered.
Value: 0: Ready
29: Only Siemens int
30: Parameter reset
Dependency: Refer to: p0970
Note: Only the following values are possible: p0010 = 0, 30
Procedure for "Reset parameter": Set p0010 to 30 and p0970 to 1.
p0010 TM54F commissioning parameter filter / TM54F com par_filt
TM54F_MA Can be changed: C2(1), T Calculated: - Access level: 1
Data type: Integer16 Dynamic index: - Func. diagram: 2847
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 95 0
Description: Sets the parameter filter for commissioning a Terminal Module 54F (TM54F).
Setting this parameter filters out the parameters that can be written into in the various commissioning steps.
For the BOP, this setting also causes the read access operations to be filtered.
Value: 0: Ready
29: Only Siemens int
30: Parameter reset
95: Safety Integrated commissioning
Dependency: Refer to: p0970
Note: Procedure for "Reset parameter": Set p0010 to 30 and p0970 to 1.
p0013[0...49] BOP user-defined list / BOP list
HUB, TM120,
TM150, TM54F_MA,
TM54F_SL
Description: Sets the required parameters to read and write via the Basic Operator Panel (BOP).
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Can be changed: U, T Calculated: - Access level: 3
Data type: Unsigned16 Dynamic index: - Func. diagram: -
P-Group: Functions Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 65535 0
Activation:
1. p0003 = 3 (expert).
2. p0013[0...49] = requested parameter number
3. If required, enter p0011 = password in order to prevent non-authorized de-activation.
4. p0016 = 1 --> activates the selected user-defined list.
De-activation/change:
1. p0003 = 3 (expert).
2. If required, p0012 = p0011, in order to be authorized to change or de-activate the list.
27
Page 28
SINAMICS parameters
3. If required p0013[0...49] = required parameter number.
4. p0016 = 1 --> activates the modified user-defined list.
5. p0003 = 0 --> de-activates the user-defined list.
Dependency: Refer to: p0009, p0976
Note: The following parameters can be read and written on the Control Unit drive object:
- p0003 (access stage)
- p0009 (device commissioning, parameter filter)
- p0012 (BOP password acknowledgement (p0013))
The following applies for the user-defined list:
- password protection is only available on the drive object Control Unit and is valid for all of the drive objects.
- p0013 cannot be included in the user-defined list for all drive objects.
- p0003, p0009, p0011, p0012, p0976 cannot, for the drive object Control Unit, be included in the user-defined list.
- the user-defined list can be cleared and de-activated "restore factory setting".
A value of 0 means: Entry is empty.
p0015 Macro drive object / Macro DO
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI,
TM120, TM150
Can be changed: C2(1) Calculated: - Access level: 1
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: Commands Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 999999 0
Description: Runs the corresponding macro files.
The selected macro file must be available on the memory card/device memory.
Example:
p0015 = 6 --> the macro file PM000006.ACX is run.
Dependency: Refer to: p0700, p1000, p1500, r8570
Caution: When executing a specific macro, the corresponding programmed settings are made and become active.
Notice: After the value has been modified, no further parameter modifications can be made and the status is shown in r3996.
Modifications can be made again when r3996 = 0.
No errors were issued during quick commissioning (p3900 = 1) when writing to parameters of the QUICK_IBN group!
Note: The macros in the specified directory are displayed in r8570. r8570 is not in the expert list of the commissioning soft-
ware.
Macros available as standard are described in the technical documentation of the particular product.
The parameter is not influenced by setting the factory setting.
p0015 Macro drive unit / Macro drv unit
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: Runs the corresponding macro files.
Dependency: Refer to: p0700, p1000, p1500, r8570
Caution: When executing a specific macro, the corresponding programmed settings are made and become active.
Can be changed: C1 Calculated: - Access level: 1
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 999999 0
The selected macro file must be available on the memory card/device memory.
Example:
p0015 = 6 --> the macro file PM000006.ACX is run.
28
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 29
SINAMICS parameters
Notice: After the value has been modified, no further parameter modifications can be made and the status is shown in r3996.
Note: The macros in the specified directory are displayed in r8570. r8570 is not in the expert list of the commissioning soft-
Modifications can be made again when r3996 = 0.
ware.
Macros available as standard are described in the technical documentation of the particular product.
The parameter is not influenced by setting the factory setting.
r0018 Control Unit firmware version / CU FW version
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: Displays the firmware version of the Control Unit.
Dependency: Refer to: r0128, r0148, r0158, r0197, r0198
Note: Example:
Can be changed: - Calculated: - Access level: 1
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 4294967295 -
The value 1010100 should be interpreted as V01.01.01.00.
r0020 Speed setpoint smoothed / n_set smth
SERVO_828,
SERVO_COMBI
Description: Displays the currently smoothed speed setpoint at the input of the speed controller or U/f characteristic (after the inter-
Dependency: Refer to: r0060
Note: Smoothing time constant = 100 ms
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5020, 6799
P-Group: Displays, signals Units group: 3_1 Unit selection: p0505
Not for motor type: - Scaling: p2000 Expert list: 1
Min Max Factory setting
- [rpm] - [rpm] - [rpm]
polator).
The signal is not suitable as a process quantity and may only be used as a display quantity.
The speed setpoint is available smoothed (r0020) and unsmoothed (r0060).
r0021 CO: Actual speed smoothed / n_act smooth
SERVO_828,
SERVO_COMBI
Description: Displays the smoothed actual value of the motor speed.
Dependency: Refer to: r0022, r0063
Note: Smoothing time constant = 100 ms
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1580, 1680,
P-Group: Displays, signals Units group: 3_1 Unit selection: p0505
Not for motor type: - Scaling: p2000 Expert list: 1
Min Max Factory setting
- [rpm] - [rpm] - [rpm]
The signal is not suitable as a process quantity and may only be used as a display quantity.
The speed actual value is available smoothed (r0021, r0022) and unsmoothed (r0063).
4710, 6799
29
Page 30
SINAMICS parameters
r0022 Speed actual value rpm smoothed / n_act rpm smooth
SERVO_828,
SERVO_COMBI
Description: Displays the smoothed actual value of the motor speed.
Dependency: Refer to: r0021, r0063
Note: Smoothing time constant = 100 ms
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1580, 1680,
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: p2000 Expert list: 1
Min Max Factory setting
- [rpm] - [rpm] - [rpm]
r0022 is identical to r0021, however, it always has units of rpm and contrary to r0021 cannot be changed over.
The signal is not suitable as a process quantity and may only be used as a display quantity.
The speed actual value is available smoothed (r0021, r0022) and unsmoothed (r0063).
r0024 CO: Line supply frequency smoothed / f_line smooth
A_INF_828,
S_INF_828,
S_INF_COMBI
Description: Displays the smoothed line supply frequency.
Dependency: Refer to: r0066
Note: Smoothing time constant = 300 ms
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8850, 8950
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: p2000 Expert list: 1
Min Max Factory setting
- [Hz] - [Hz] - [Hz]
The signal is not suitable as a process quantity and may only be used as a display quantity.
The line frequency is available smoothed (r0024) and unsmoothed (r0066).
A positive sign of the frequency is obtained when the line supply phases U, V and W are connected with the correct
phase sequence.
A negative sign of the frequency is obtained when the 3 line phases are interchanged therefore designating a negative
direction of the rotating field of the 3-phase line supply voltage.
4710, 6799
r0024 Output frequency smoothed / f_outp smooth
SERVO_828,
SERVO_COMBI
Description: Displays the smoothed converter frequency.
Dependency: Refer to: r0066
Note: Smoothing time constant = 100 ms
30
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1690, 5300,
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: p2000 Expert list: 1
Min Max Factory setting
- [Hz] - [Hz] - [Hz]
The signal is not suitable as a process quantity and may only be used as a display quantity.
The output frequency is available smoothed (r0024) and unsmoothed (r0066).
5730, 6799
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 31

r0025[0...3] CO: Input voltage smoothed / U_inp smooth
A_INF_828,
S_INF_828,
S_INF_COMBI
Description: Displays the smoothed actual value of the input voltage.
Index: [0] = Voltage at input terminals of power unit from line supply model
Dependency: Refer to: r0072
Note: Smoothing time constant = 300 ms
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8850, 8950
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: p2001 Expert list: 1
Min Max Factory setting
- [Vrms] - [Vrms] - [Vrms]
[1] = Voltage at VSM or at input terminals of the line filter
[2] = Voltage of the voltage source from the line supply model
[3] = Smoothed voltage of voltage source from line supply model
The signals are not suitable as process quantity and may only be used as display quantities.
The input voltages are available smoothed (r0025) and unsmoothed (r0072).
Re r0025[0]:
Pulsed voltage at the line supply input terminals of the power unit. The value is calculated from the modulation depth
r0074 and is therefore only correct in the closed-loop controlled mode and when the pulses are enabled.
Re r0025[1]:
Absolute voltage at the input terminals of the line filter or the connection point of a VSM. The value is calculated from
the VSM measured values r3661 and r3662 and is therefore equal to 0 if a VSM is not connected.
Re r0025[2]:
Estimated value for the voltage of the voltage source that is calculated in the voltage model of the line supply PLL.
Re r0025[3]:
Smoothed display value of the filtered source voltage from r0072[3].
SINAMICS parameters
r0025 CO: Output voltage smoothed / U_outp smooth
SERVO_828,
SERVO_COMBI
Description: Displays the smoothed output voltage of the power unit.
Dependency: Refer to: r0072
Note: Smoothing time constant = 100 ms
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1690, 5730,
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: p2001 Expert list: 1
Min Max Factory setting
- [Vrms] - [Vrms] - [Vrms]
The signal is not suitable as a process quantity and may only be used as a display quantity.
The output voltage is available smoothed (r0025) and unsmoothed (r0072).
r0026 CO: DC link voltage smoothed / Vdc smooth
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI
Description: Displays the smoothed actual value of the DC link voltage.
Dependency: Refer to: r0070
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5730, 6799,
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: p2001 Expert list: 1
Min Max Factory setting
- [V] - [V] - [V]
6799
8750, 8850, 8950
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
31
Page 32

SINAMICS parameters
Notice: This smoothed signal is not suitable for diagnostics or evaluation of dynamic operations. In this case, the unsmoothed
Note: A_INF, B_INF, S_INF: smoothing time constant = 300 ms
value should be used.
The signal is not suitable as a process quantity and may only be used as a display quantity.
The DC link voltage is available smoothed (r0026) and unsmoothed (r0070).
r0026 CO: DC link voltage smoothed / Vdc smooth
SERVO_828,
SERVO_COMBI
Description: Displays the smoothed actual value of the DC link voltage.
Dependency: Refer to: r0070
Notice: For SINAMICS S120 AC Drive (AC/AC) the following applies:
Note: SERVO, VECTOR: Smoothing time constant = 100 ms
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5730, 8750,
8850, 8950
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: p2001 Expert list: 1
Min Max Factory setting
- [V] - [V] - [V]
When measuring a DC link voltage < 200 V, for the Power Module (e.g. PM340) a valid measured value is not supplied. In this case, when an external 24 V power supply is connected, a value of approx. 24 V is displayed in the display
parameter.
The signal is not suitable as a process quantity and may only be used as a display quantity.
The DC link voltage is available smoothed (r0026) and unsmoothed (r0070).
r0027 CO: Absolute actual current smoothed / I_act abs val smth
A_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI
Description: Displays the smoothed absolute actual current value.
Dependency: Refer to: r0068
Notice: This smoothed signal is not suitable for diagnostics or evaluation of dynamic operations. In this case, the unsmoothed
Note: A_INF, S_INF, VECTOR: Smoothing time constant = 300 ms
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5730, 6799,
8850, 8950
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [Arms] - [Arms] - [Arms]
value should be used.
SERVO: Smoothing time constant = 100 ms
The signal is not suitable as a process quantity and may only be used as a display quantity.
The absolute current actual value is available smoothed (r0027) and unsmoothed (r0068).
r0027 CO: Absolute actual current smoothed / I_act abs val smth
B_INF_828 Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8750
P-Group: Displays, signals Units group: 6_4 Unit selection: p0505
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [A] - [A] - [A]
Description: Displays the smoothed absolute actual current value.
Dependency: Refer to: r0068
Parameter description
32
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 33

SINAMICS parameters
Notice: This smoothed signal is not suitable for diagnostics or evaluation of dynamic operations. In this case, the unsmoothed
Note: Smoothing time constant = 300 ms
value should be used.
For Basic Line Modules of chassis format, the displayed value is invalid as these units do not have any current sensing.
The signal is not suitable as a process quantity and may only be used as a display quantity.
The absolute current actual value is available smoothed (r0027) and unsmoothed (r0068).
r0028 Modulation depth smoothed / Mod_depth smth
A_INF_828,
SERVO_828,
SERVO_COMBI
Description: Displays the smoothed actual value of the modulation depth.
Dependency: Refer to: r0074
Note: A_INF: Smoothing time constant = 300 ms
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5730, 6799,
8950
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [%] - [%] - [%]
SERVO, VECTOR: Smoothing time constant = 100 ms
The signal is not suitable as a process quantity and may only be used as a display quantity.
The modulation depth is available smoothed (r0028) and unsmoothed (r0074).
r0029 Reactive current actual value smoothed / I_react smooth
A_INF_828,
S_INF_828,
S_INF_COMBI
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8850, 8950
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [Arms] - [Arms] - [Arms]
Description: Displays the smoothed actual value of the reactive current component.
Note: Smoothing time constant = 300 ms
The signal is not suitable as a process quantity and may only be used as a display quantity.
The reactive current actual value is available smoothed (r0029) and unsmoothed (r0076).
r0029 Current actual value field-generating smoothed / Id_act smooth
SERVO_828,
SERVO_COMBI
Description: Displays the smoothed field-generating actual current.
Dependency: Refer to: r0076
Note: SERVO: Smoothing time constant = 100 ms
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5730, 6799
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [Arms] - [Arms] - [Arms]
VECTOR: Smoothing time constant = 300 ms
The signal is not suitable as a process quantity and may only be used as a display quantity.
The field-generating current actual value is available smoothed (r0029) and unsmoothed (r0076).
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
33
Page 34

SINAMICS parameters
r0030 Active current actual value smoothed / I_active smooth
A_INF_828,
S_INF_828,
S_INF_COMBI
Description: Displays the smoothed actual value of the active current components.
Dependency: Refer to: r0078
Note: Smoothing time constant = 300 ms
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8850, 8950
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [Arms] - [Arms] - [Arms]
The signal is not suitable as a process quantity and may only be used as a display quantity.
The active current actual value is available smoothed (r0030) and unsmoothed (r0078).
r0030 Current actual value torque-generating smoothed / Iq_act smooth
SERVO_828,
SERVO_COMBI
Description: Displays the smoothed torque-generating actual current.
Dependency: Refer to: r0078
Note: SERVO: Smoothing time constant = 100 ms
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5730, 6799
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [Arms] - [Arms] - [Arms]
VECTOR: Smoothing time constant = 300 ms
The signal is not suitable as a process quantity and may only be used as a display quantity.
The following applies for SERVO:
The torque-generating current actual value is available smoothed (r0030 with 100 ms, r0078[1] with p0045) and
unsmoothed (r0078[0]).
The following applies for VECTOR:
The torque-generating current actual value is available smoothed (r0030 with 300 ms) and unsmoothed (r0078).
r0031 Actual torque smoothed / M_act smooth
SERVO_828,
SERVO_COMBI
Description: Displays the smoothed torque actual value.
Dependency: Refer to: r0080
Note: Smoothing time constant = 100 ms
34
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5730, 6799
P-Group: Displays, signals Units group: 7_1 Unit selection: p0505
Not for motor type: - Scaling: p2003 Expert list: 1
Min Max Factory setting
- [Nm] - [Nm] - [Nm]
The signal is not suitable as a process quantity and may only be used as a display quantity.
The active current actual value is available smoothed (r0031) and unsmoothed (r0080).
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 35

SINAMICS parameters
r0032 CO: Active power actual value smoothed / P_actv_act smth
A_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI
Description: Displays the smoothed actual value of the active power.
Dependency: Refer to: r0082
Notice: This smoothed signal is not suitable for diagnostics or evaluation of dynamic operations. In this case, the unsmoothed
Note: Significance for the drive: Power output at the motor shaft
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5730, 6799,
8750, 8850, 8950
P-Group: Displays, signals Units group: 14_10 Unit selection: p0505
Not for motor type: - Scaling: r2004 Expert list: 1
Min Max Factory setting
- [kW] - [kW] - [kW]
value should be used.
Significance for the infeed: Line power drawn
For A_INF, B_INF and S_INF the following applies:
The active power is available smoothed (r0032 with 300 ms) and unsmoothed (r0082).
The following applies for SERVO:
The active power is available smoothed (r0032 with 100 ms, r0082[1] with p0045) and unsmoothed (r0082[0]).
For VECTOR and VECTORMV, the following applies:
The active power is available smoothed (r0032 with 100 ms) and unsmoothed (r0082).
r0032 CO: Active power actual value smoothed / P_actv_act smth
B_INF_828 Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5730, 6799,
8750, 8850, 8950
P-Group: Displays, signals Units group: 14_10 Unit selection: p0505
Not for motor type: - Scaling: r2004 Expert list: 1
Min Max Factory setting
- [kW] - [kW] - [kW]
Description: Displays the smoothed actual value of the active power.
Dependency: Refer to: r0082
Notice: This smoothed signal is not suitable for diagnostics or evaluation of dynamic operations. In this case, the unsmoothed
value should be used.
For Basic Line Modules of chassis format, the displayed value is invalid as these units do not have any current sensing.
Note: Significance for the drive: Power output at the motor shaft
Significance for the infeed: Line power drawn
For A_INF, B_INF and S_INF the following applies:
The active power is available smoothed (r0032 with 300 ms) and unsmoothed (r0082).
The following applies for SERVO:
The active power is available smoothed (r0032 with 100 ms, r0082[1] with p0045) and unsmoothed (r0082[0]).
For VECTOR and VECTORMV, the following applies:
The active power is available smoothed (r0032 with 100 ms) and unsmoothed (r0082).
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
35
Page 36

SINAMICS parameters
r0033 Torque utilization smoothed / M_util smooth
SERVO_828,
SERVO_COMBI
Description: Displays the smoothed torque utilization as a percentage.
Note: Smoothing time constant = 100 ms
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8012
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: PERCENT Expert list: 1
Min Max Factory setting
- [%] - [%] - [%]
The torque utilization is obtained from the required smoothed torque in reference to the torque limit, scaled using
p2196.
The signal is not suitable as a process quantity and may only be used as a display quantity.
The torque utilization is available smoothed (r0033) and unsmoothed (r0081).
For M_set total (r0079) > M_max offset (p1532), the following applies:
- demanded torque = M_set total - M_max offset
- actual torque limit = M_max upper effective (r1538) - M_max offset
For M_set total (r0079) <= M_max offset (p1532), the following applies:
- demanded torque = M_max offset - M_set total
- actual torque limit = M_max offset - M_max lower effective (r1539)
For the actual torque limit = 0, the following applies: r0033 = 100 %
For the actual torque limit < 0, the following applies: r0033 = 0 %
r0034 CO: Motor utilization / Motor utilization
SERVO_828,
SERVO_COMBI
Description: Displays the motor utilization from motor temperature model 1 (I2t) or 3.
Dependency: The motor utilization is only determined for permanent-magnet synchronous motors when the motor temperature
Notice: After the drive is switched on, the system starts to determine the motor temperature with an assumed model value.
Note: Smoothing time constant = 100 ms
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8017
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: ASM, REL, FEM Scaling: PERCENT Expert list: 1
Min Max Factory setting
- [%] - [%] - [%]
model 1 (I2t) or 3 is activated.
For motor temperature model 1 (I2t) (p0612.0 = 1), the following applies:
- r0034 = (motor model temperature - 40 K) / (p0605 - 40 K) * 100 %
For motor temperature model 3 (p0612.2 = 1), the following applies:
- r0034 = (motor model temperature - p0613) / (p5390 - p0613) * 100 %
Refer to: p0611, p0612, p0615
This means that the value for the motor utilization is only valid after a stabilization time.
The signal is not suitable as a process quantity and may only be used as a display quantity.
For r0034 = -200.0 %, the following applies:
The value is invalid (e.g. the motor temperature model is not activated or has been incorrectly parameterized).
36
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 37

r0035 CO: Temperature input / Temp_input
A_INF_828,
S_INF_828,
S_INF_COMBI
Description: Displays the temperature currently measured at X21 (booksize) or X41 (chassis).
Dependency: Refer to: A06260, F06261, F06262
Notice: The function in r0192.11 must be available in order to obtain a correct display.
Note: For r0035 equal to -200.0 °C, the following applies:
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8850, 8950
P-Group: Displays, signals Units group: 21_1 Unit selection: p0505
Not for motor type: - Scaling: p2006 Expert list: 1
Min Max Factory setting
- [°C] - [°C] - [°C]
When using an Active Interface Module (p0220 = 41 ... 45) a bimetallic sensor must be connected up to monitor the
temperature. The temperature sensor type is indicated using p0601 and cannot be changed when an Active Interface
Module is being used.
Temperature within permissible limit values: r0035 = -50°C
Temperature outside the permissible limit values: r0035 = 250°C
- "no sensor" selected in p0601!
For r0035 equal to -300.0 °C, the following applies:
- a KTY84 is selected in p0601 but is not connected!
- the temperature display is not valid (temperature sensor error)!
SINAMICS parameters
r0035 CO: Temperature input / Temp_input
B_INF_828 Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8750
P-Group: Displays, signals Units group: 21_1 Unit selection: p0505
Not for motor type: - Scaling: p2006 Expert list: 1
Min Max Factory setting
- [°C] - [°C] - [°C]
Description: Displays the temperature currently measured at X21 (booksize) or X41 (chassis).
For a BLM with internal Braking Module, a bimetallic sensor must be connected up to monitor the temperature of the
braking resistor. The temperature sensor type is indicated using p0601 and cannot be changed for the existing internal
Braking Module.
Temperature within permissible limit values: r0035 = -50°C
Temperature outside the permissible limit values: r0035 = 250°C
Dependency: Refer to: F06907, F06908
Notice: The function in r0192.11 must be available in order to obtain a correct display.
Note: For r0035 equal to -200.0 °C, the following applies:
- "no sensor" selected in p0601!
For r0035 equal to -300.0 °C, the following applies:
- a KTY84 is selected in p0601 but is not connected!
- the temperature display is not valid (temperature sensor error)!
r0035 CO: Motor temperature / Mot temp
SERVO_828,
SERVO_COMBI
Description: Displays the actual temperature in the motor.
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 7008, 8016,
8017
P-Group: Displays, signals Units group: 21_1 Unit selection: p0505
Not for motor type: - Scaling: p2006 Expert list: 1
Min Max Factory setting
- [°C] - [°C] - [°C]
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
37
Page 38

SINAMICS parameters
Note: For r0035 not equal to -200.0 °C, the following applies:
- this temperature display is valid.
- a KTY sensor is connected.
- the thermal model for the induction motor is activated (p0612 bit 1 = 1 and temperature sensor de-activated: p0600 =
0 or p0601 = 0).
For r0035 equal to -200.0 °C, the following applies:
- this temperature display is not valid (temperature sensor error).
- A PTC sensor or bimetallic NC contact is connected.
- the temperature sensor of the synchronous motor is de-activated (p0600 = 0 or p0601 = 0).
r0036 CO: Power unit overload I2t / PU overload I2t
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI
Description: Displays the power unit overload determined using the I2t calculation.
Dependency: Refer to: p0290, p0294
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8014
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: PERCENT Expert list: 1
Min Max Factory setting
- [%] - [%] - [%]
A current reference value is defined for the I2t monitoring of the power unit. It represents the current that can be conducted by the power unit without any influence of the switching losses (e.g. the continuously permissible current of the
capacitors, inductances, busbars, etc.).
If the I2t reference current of the power unit is not exceeded, then an overload (0 %) is not displayed.
In the other case, the degree of thermal overload is calculated, whereby 100% results in a trip.
Refer to: F30005
r0037[0...19] CO: Power unit temperatures / PU temperatures
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI
Description: Displays the temperatures in the power unit.
Index: [0] = Inverter, maximum value
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8014
P-Group: Displays, signals Units group: 21_1 Unit selection: p0505
Not for motor type: - Scaling: p2006 Expert list: 1
Min Max Factory setting
- [°C] - [°C] - [°C]
[1] = Depletion layer maximum value
[2] = Rectifier maximum value
[3] = Air intake
[4] = Interior of power unit
[5] = Inverter 1
[6] = Inverter 2
[7] = Inverter 3
[8] = Inverter 4
[9] = Inverter 5
[10] = Inverter 6
[11] = Rectifier 1
[12] = Rectifier 2
[13] = Depletion layer 1
[14] = Depletion layer 2
[15] = Depletion layer 3
[16] = Depletion layer 4
[17] = Depletion layer 5
38
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 39

[18] = Depletion layer 6
[19] = Cooling unit liquid intake
Note: The value of -200 indicates that there is no measuring signal.
r0037[0]: Maximum value of the inverter temperatures (r0037[5...10]).
r0037[1]: Maximum value of the depletion layer temperatures (r0037[13...18]).
r0037[2]: Maximum value of the rectifier temperatures (r0037[11...12]).
The maximum value is the temperature of the hottest inverter, depletion layer, or rectifier.
r0037[0...1] Control Unit temperature / CU temp
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: Displays the measured Control Unit temperature.
Index: [0] = Actual measured value
Dependency: Refer to: A01009
Note: The value of -200 indicates that there is no measuring signal.
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: -
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: p2006 Expert list: 1
Min Max Factory setting
- [°C] - [°C] - [°C]
An appropriate message is output when the permitted operating temperature is exceeded.
[1] = Maximum measured value
SINAMICS parameters
r0038 Power factor smoothed / Cos phi smooth
A_INF_828,
S_INF_828,
S_INF_COMBI
Description: Displays the smoothed actual power factor.
Notice: For infeed units, the following applies:
Note: Smoothing time constant = 300 ms
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 6799, 8850,
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
For active powers < 25 % of the rated power, this does not provide any useful information.
The signal is not suitable as a process quantity and may only be used as a display quantity.
Meaning for motor:
- power factor of the basic fundamental signals at the converter output.
Meaning for infeed:
- Power factor at the connection point (r3470, r3471)
r0039[0...2] Energy display / Energy displ
SERVO_828,
SERVO_COMBI
Description: Displays the energy values at the output terminals of the power unit.
Index: [0] = Energy balance (sum)
Dependency: Refer to: p0040
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: -
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- [kWh] - [kWh] - [kWh]
[1] = Energy drawn
[2] = Energy fed back
8950
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
39
Page 40

SINAMICS parameters
Note: Re index 0:
Sum of the energy drawn and energy that is fed back.
p0040 Reset energy consumption display / Energy usage reset
SERVO_828,
SERVO_COMBI
Description: Setting to reset the display in r0039 and r0041.
Dependency: Refer to: r0039
Can be changed: U, T Calculated: - Access level: 2
Data type: Unsigned8 Dynamic index: - Func. diagram: -
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 1 0
Procedure:
Set p0040 = 0 --> 1
The displays are reset and the parameter is automatically set to zero.
p0045 Display values smoothing time constant / Disp_val T_smooth
A_INF_828 Can be changed: U, T Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0.00 [ms] 10000.00 [ms] 150.00 [ms]
Description: Sets the smoothing time constant for the following display values:
r5515[1], r5516[1]
p0045 Display values smoothing time constant / Disp_val T_smooth
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI
Description: Sets the smoothing time constant for the following display values:
Can be changed: U, T Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 4715, 5610,
5730, 6714, 8012
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0.00 [ms] 10000.00 [ms] 1.00 [ms]
SERVO: r0078[1], r0079[1], r0081 (calculated from the quantities smoothed with p0045), r0082[1].
VECTOR: r0063[1], r0068[1], r0080[1], r0082[1].
r0046.0...29 CO/BO: Missing enable sig / Missing enable sig
A_INF_828,
S_INF_828,
S_INF_COMBI
Description: Displays missing enable signals that are preventing the closed-loop infeed control from being commissioned.
Bit field: Bit Signal name 1 signal 0 signal FP
Can be changed: - Calculated: - Access level: 1
Data type: Unsigned32 Dynamic index: - Func. diagram: 8834, 8934
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
00 OFF1 enable missing Yes No 01 OFF2 enable missing Yes No 03 Operation enable missing Yes No 08 EP terminals enable missing Yes No -
40
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 41

16 OFF1 enable internal missing Yes No 17 OFF2 enable internal missing Yes No 19 Pulse enable internal missing Yes No 26 Infeed inactive or not operational Yes No 29 Cooling unit ready signal missing Yes No -
Dependency: Refer to: r0002
Note: The value r0046 = 0 indicates that all enable signals for the infeed are present.
Bit 00 = 1 (enable signal missing), if:
- the signal source in p0840 is a 0 signal.
- there is a "switching on inhibited".
Bit 01 = 1 (enable signal missing), if:
- the signal source in p0844 or p0845 is a 0 signal.
Bit 03 = 1 (enable signal missing), if:
- the signal source in p0852 is a 0 signal.
Bit 08 = 1 (enable signal missing), if:
- the pulse enable via terminal EP is missing (booksize: X21, chassis: X41).
Bit 16 = 1 (enable signal missing), if:
- there is an OFF1 fault response. The system is only enabled if the fault is removed and was acknowledged and the
"switching on inhibited" withdrawn with OFF1 = 0.
Bit 17 = 1 (enable signal missing), if:
- the commissioning mode is selected (p0009 > 0 or p0010 > 0) or there is an OFF2 fault response or the OFF1 signal
source (p0840) is changed.
Bit 19 = 1 (internal pulse enable missing), if:
- synchronization is running between the basic clock cycle, DRIVE-CLiQ clock cycle and application clock cycle.
Bit 26 = 1 (enable signal missing), if:
- the infeed is inactive (p0105 = 0) or is not operational (r7850[DO-Index]=0).
Bit 29 = 1 (enable signal missing), if:
- the cooling unit ready signal via BI: p0266[1] missing.
SINAMICS parameters
r0046.0...29 CO/BO: Missing enable sig / Missing enable sig
B_INF_828 Can be changed: - Calculated: - Access level: 1
Data type: Unsigned32 Dynamic index: - Func. diagram: 8734
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
Description: Displays missing enable signals that are preventing the closed-loop infeed control from being commissioned.
Bit field: Bit Signal name 1 signal 0 signal FP
00 OFF1 enable missing Yes No 01 OFF2 enable missing Yes No 08 EP terminals enable missing Yes No 16 OFF1 enable internal missing Yes No 17 OFF2 enable internal missing Yes No 26 Infeed inactive or not operational Yes No 29 Cooling unit ready signal missing Yes No -
Dependency: Refer to: r0002
Note: The value r0046 = 0 indicates that all enable signals for the infeed are present.
Bit 00 = 1 (enable signal missing), if:
- the signal source in p0840 is a 0 signal.
- there is a "switching on inhibited".
Bit 01 = 1 (enable signal missing), if:
- the signal source in p0844 or p0845 is a 0 signal.
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
41
Page 42

SINAMICS parameters
Bit 16 = 1 (enable signal missing), if:
- there is an OFF1 fault response. The system is only enabled if the fault is removed and was acknowledged and the
"switching on inhibited" withdrawn with OFF1 = 0.
Bit 17 = 1 (enable signal missing), if:
- the commissioning mode is selected (p0009 > 0 or p0010 > 0) or there is an OFF2 fault response or the OFF1 signal
source (p0840) is changed.
Bit 26 = 1 (enable signal missing), if:
- the infeed is inactive (p0105 = 0) or is not operational (r7850[DO-Index]=0).
Bit 29 = 1 (enable signal missing), if:
- the cooling unit ready signal via BI: p0266[1] missing.
r0046.0...31 CO/BO: Missing enable sig / Missing enable sig
SERVO_828,
SERVO_COMBI
Description: Displays missing enable signals that are preventing the closed-loop drive control from being commissioned.
Bit field: Bit Signal name 1 signal 0 signal FP
Dependency: Refer to: r0002
Note: The value r0046 = 0 indicates that all enable signals for this drive are present.
Can be changed: - Calculated: - Access level: 1
Data type: Unsigned32 Dynamic index: - Func. diagram: 2634
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
00 OFF1 enable missing Yes No 01 OFF2 enable missing Yes No 02 OFF3 enable missing Yes No 03 Operation enable missing Yes No 04 Armature short-circuit / DC braking, enable
missing
05 STOP2 enable missing Yes No 06 STOP1 enable missing Yes No 08 Safety enable missing Yes No 09 Infeed enable missing Yes No 10 Ramp-function generator enable missing Yes No 11 Ramp-function generator start missing Yes No 12 Setpoint enable missing Yes No 16 OFF1 enable internal missing Yes No 17 OFF2 enable internal missing Yes No 18 OFF3 enable internal missing Yes No 19 Pulse enable internal missing Yes No 20 Armature short-circuit/DC braking internal
enable missing
21 STOP2 enable internal missing Yes No 22 STOP1 enable internal missing Yes No 25 Function bypass active Yes No 26 Drive inactive or not operational Yes No 27 De-magnetizing not completed Yes No 28 Brake open missing Yes No 29 Cooling unit ready signal missing Yes No 30 Speed controller inhibited Yes No 31 Jog setpoint active Yes No -
Bit 00 = 1 (enable signal missing), if:
- the signal source in p0840 is a 0 signal.
- there is a "switching on inhibited".
Bit 01 = 1 (enable signal missing), if:
- the signal source in p0844 or p0845 is a 0 signal.
Yes No 7014,
7016
Yes No 7014,
7016
42
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 43

SINAMICS parameters
Bit 02 = 1 (enable signal missing), if:
- the signal source in p0848 or p0849 is a 0 signal.
Bit 03 = 1 (enable signal missing), if:
- the signal source in p0852 is a 0 signal.
Bit 04 =1 (armature short-circuit active), if:
- the signal source in p1230 has a 1 signal
Bit 05, Bit 06: Being prepared
Bit 08 = 1 (enable signal missing), if:
- safety functions have been enabled and STO is active.
STO selected via terminals:
- the pulse enable via terminal EP is missing (booksize: X21, chassis: X41), or the signal source in p9620 is for a 0 signal.
STO selected via PROFIsafe or TM54F:
- A safety-relevant signal is present with a STOP A response.
Bit 09 = 1 (enable signal missing), if:
- the signal source in p0864 is a 0 signal.
Bit 10 = 1 (enable signal missing), if:
- the signal source in p1140 is a 0 signal.
Bit 11 = 1 (enable signal missing) if the speed setpoint is frozen, because:
- the signal source in p1141 is a 0 signal.
- the speed setpoint is entered from jogging and the two signal sources for jogging, bit 0 (p1055) and bit 1 (p1056)
have a 1 signal.
Bit 12 = 1 (enable signal missing), if:
- the signal source in p1142 is a 0 signal.
- When activating the function module "basic positioner" (r0108.4 = 1), the signal source in p1142 is set to a 0 signal.
Bit 16 = 1 (enable signal missing), if:
- there is an OFF1 fault response. The system is only enabled if the fault is removed and was acknowledged and the
"switching on inhibited" withdrawn with OFF1 = 0.
Bit 17 = 1 (enable signal missing), if:
- commissioning mode is selected (p0009 > 0 or p0010 > 0).
- there is an OFF2 fault response.
- the drive is inactive (p0105 = 0) or is not operational (r7850[DO-Index]=0).
Bit 18 = 1 (enable signal missing), if:
- OFF3 has still not been completed or an OFF3 fault response is present.
Bit 19 = 1 (internal pulse enable missing), if:
- synchronization is running between the basic clock cycle, DRIVE-CLiQ clock cycle and application clock cycle.
Bit 20 =1 (internal armature short-circuit active), if:
- the drive is not in the state "S4: Operation" or "S5x" (refer to function diagram 2610).
- the internal pulse enable is missing (r0046.19 = 0).
Bit 21 = 1 (enable signal missing), if:
The pulses have been enabled and the speed setpoint has still not been enabled, because:
- the holding brake opening time (p1216) has still not expired.
- the motor has still not been magnetized (induction motor).
- the encoder has not been calibrated (U/f vector and synchronous motor)
Bit 22: Being prepared
Bit 26 = 1 (enable signal missing), if:
- the drive is inactive (p0105 = 0) or is not operational (r7850[DO-Index]=0).
- All power units of a parallel connection are deactivated (p0125, p0895).
Bit 27 = 1 (enable signal missing), if:
- de-magnetizing has still not been completed (only for vector).
Bit 28 = 1 (enable signal missing), if:
- the holding brake is closed or has still not been opened.
Bit 29 = 1 (enable signal missing), if:
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
43
Page 44

SINAMICS parameters
- the cooling unit ready signal via BI: p0266[1] missing.
Bit 30 = 1 (speed controller inhibited), if one of the following reasons is present:
- A 0 signal is available via BI: p0856.
- the function generator with current input is active.
- the measuring function "current controller reference frequency characteristic" is active.
- the pole position identification is active.
- motor data identification is active (only certain steps).
Bit 31 = 1 (enable signal missing), if:
- the speed setpoint from jog 1 or 2 is entered.
r0047 Identification status / Ident status
SERVO_828,
SERVO_COMBI
Description: Displays the currently executed steps or the first step after the enable for the motor identification and pole position
Value: 0: No measurement
Can be changed: - Calculated: - Access level: 1
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 104 -
identification routines.
1: PolID: Wait for brake closing time
2: PolID: Measurement, step 1
3: PolID: Measurement, step 2
4: PolID: Measurement, step 3
5: PolID: Measurement, step 4
6: PolID: Measurement, stage 2
7: PolID: Measurement evaluation
8: PolID: Measurement end
11: MotID: Inductance measurement, step 1
12: MotID: Inductance measurement, step 2
13: MotID: Inductance measurement evaluation
14: MotID: Resistance measurement evaluation
15: MotID: Fine synchronization, step 1
16: MotID: Fine synchronization, step 2
17: MotID: Fine synchronization, step 3
18: MotID: Fine synchronization, end
20: MotID: Rotating inductance measurement, step 1
21: MotID: Rotating inductance measurement, step 2
22: MotID: Rotating inductance measurement, step 3
23: MotID: Rotating inductance measurement, step 4
24: MotID: Rotating Inductance measurement evaluation
25: MotID: Rotating Inductance measurement end
30: MotID: Induction motor measurement, step 1
31: MotID: Induction motor measurement, step 2
32: MotID: Induction motor measurement, step 3
33: MotID: Induction motor measurement, step 4
34: MotID: Induction motor measurement, step 5
35: MotID: Induction motor measurement, step 6
36: MotID: Induction motor measurement, step 7
37: MotID: Induction motor measurement, step 8
38: MotID: Induction motor measurement, step 9
40: MotID: Commutating angle, step 1
41: MotID: Commutating angle, step 2
42: MotID: Commutating angle, step 3
43: MotID: Commutating angle, step 4
45: MotID: Commutating angle rotating, step 1
44
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 45

46: MotID: Commutating angle rotating, step 2
47: MotID: Commutating angle rotating, step 3
48: MotID: Commutating angle rotating complete
50: MotID: kT determination, step 1
51: MotID: kT determination, step 2
52: MotID: kT determination, step 3
53: MotID: kT determination evaluation
54: MotID: kT determination end
60: MotID: Reluctance constant measurement, step 1
61: MotID: Reluctance constant measurement, step 2
62: MotID: Reluctance constant measurement, step 3
63: MotID: Reluctance constant measurement end
70: MotID: Moment of inertia measurement, step 1
71: MotID: Moment of inertia measurement, step 2
72: MotID: Moment of inertia measurement, step 3
73: MotID: Moment of inertia measurement end
80: MotID: Magnetizing inductance measurement, step 1
81: MotID: Magnetizing inductance measurement, step 2
82: MotID: Magnetizing inductance measurement, step 3
83: MotID: Magnetizing inductance measurement evaluation
84: MotID: Magnetizing inductance measurement end
90: MotID: Saturation characteristic. step 1
91: MotID: Saturation characteristic. step 2
92: MotID: Saturation characteristic. step 3
93: MotID: Saturation characteristic evaluation 1
94: MotID: Saturation characteristic evaluation 2
95: MotID: Saturation characteristic end
96: MotID: Converter model, step 1
97: MotID: Converter model, step 2
98: MotID: Converter model, step 3
99: MotID: Converter model, step 4
100: PolID: Motion-based, step 1
101: PolID: Motion-based, step 2
102: PolID: Motion-based, step 3
103: PolID: Motion-based, step 4
104: PolID: Motion-based, step 5
SINAMICS parameters
r0049[0...3] Motor data set/encoder data set effective / MDS/EDS effective
SERVO_828,
SERVO_COMBI
Description: Displays the effective Motor Data Set (MDS) and the effective Encoder Data Sets (EDS).
Index: [0] = Motor Data Set MDS effective
Dependency: Refer to: p0186, p0187, p0188, p0189, r0838
Note: Value 99 means the following: No encoder assigned (not configured).
Can be changed: - Calculated: - Access level: 2
Data type: Unsigned8 Dynamic index: - Func. diagram: 8565
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
[1] = Encoder 1 Encoder Data Set EDS effective
[2] = Encoder 2 Encoder Data Set EDS effective
[3] = Encoder 3 Encoder Data Set EDS effective
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
45
Page 46

SINAMICS parameters
r0050.0...3 CO/BO: Command Data Set CDS effective / CDS effective
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI
Description: Displays the effective Command Data Set (CDS).
Bit field: Bit Signal name 1 signal 0 signal FP
Dependency: Refer to: p0810, r0836
Note: The Command Data Set selected using a binector input (e.g. p0810) is displayed using r0836.
Can be changed: - Calculated: - Access level: 2
Data type: Unsigned8 Dynamic index: - Func. diagram: 8560
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
00 CDS eff., bit 0 ON OFF 01 CDS eff., bit 1 ON OFF 02 CDS eff., bit 2 ON OFF 03 CDS eff., bit 3 ON OFF -
r0051.0...4 CO/BO: Drive Data Set DDS effective / DDS effective
SERVO_828,
SERVO_COMBI
Can be changed: - Calculated: - Access level: 2
Data type: Unsigned8 Dynamic index: - Func. diagram: -
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
Description: Displays the effective Drive Data Set (DDS).
Bit field: Bit Signal name 1 signal 0 signal FP
Dependency: Refer to: p0820, p0821, p0822, p0823, p0824, r0837
Note: The drive data set changeover is suppressed when selecting the motor identification, during the rotating measurement,
00 DDS eff., bit 0 ON OFF 01 DDS eff., bit 1 ON OFF 02 DDS eff., bit 2 ON OFF 03 DDS eff., bit 3 ON OFF 04 DDS eff., bit 4 ON OFF -
the encoder calibration and the friction characteristic record.
r0056.1...15 CO/BO: Status word, closed-loop control / ZSW cl-loop ctrl
SERVO_828,
SERVO_COMBI
Description: Displays the status word of the closed-loop control.
Bit field: Bit Signal name 1 signal 0 signal FP
Can be changed: - Calculated: - Access level: 3
Data type: Unsigned16 Dynamic index: - Func. diagram: 1530, 2526
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
01 De-magnetizing completed Yes No 04 Magnetizing completed Yes No 2701
08 Field weakening active Yes No 14 Vdc_max controller active Yes No 15 Vdc_min controller active Yes No -
46
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 47

SINAMICS parameters
Note: Re bit 04:
The bit is immediately set after power-on
Exception:
For an induction motor with brake (except for p1215 = 2), the bit is only set when 60% of the reference flux is reached.
r0060 CO: Speed setpoint before the setpoint filter / n_set before filt.
SERVO_828,
SERVO_COMBI
Description: Displays the actual speed setpoint at the input of the speed controller or U/f characteristic (after the interpolator).
Dependency: Refer to: r0020
Note: The speed setpoint is available smoothed (r0020) and unsmoothed (r0060).
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 2701, 2704,
5020, 6030, 6799
P-Group: Displays, signals Units group: 3_1 Unit selection: p0505
Not for motor type: - Scaling: p2000 Expert list: 1
Min Max Factory setting
- [rpm] - [rpm] - [rpm]
r0061[0...1] CO: Actual speed unsmoothed / n_act unsmoothed
SERVO_828,
SERVO_COMBI
Description: Displays the unsmoothed actual speed values sensed by the encoders.
Index: [0] = Encoder 1
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1580, 4710,
4715
P-Group: Displays, signals Units group: 3_1 Unit selection: p0505
Not for motor type: - Scaling: p2000 Expert list: 1
Min Max Factory setting
- [rpm] - [rpm] - [rpm]
[1] = Encoder 2
r0062 CO: Speed setpoint after the filter / n_set after filter
SERVO_828,
SERVO_COMBI
Description: Displays the actual speed setpoint after the setpoint filters.
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1590, 1750,
P-Group: Displays, signals Units group: 3_1 Unit selection: p0505
Not for motor type: - Scaling: p2000 Expert list: 1
Min Max Factory setting
- [rpm] - [rpm] - [rpm]
r0063 CO: Actual speed smoothed / n_act smooth
SERVO_828,
SERVO_COMBI
Description: Displays the current smoothed actual speed for speed control.
Dependency: Refer to: r0021, r0022, r0061, p1441, p1451
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1580, 1590,
P-Group: Displays, signals Units group: 3_1 Unit selection: p0505
Not for motor type: - Scaling: p2000 Expert list: 1
Min Max Factory setting
- [rpm] - [rpm] - [rpm]
5020, 5030, 5210, 6030
4710, 5300
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
47
Page 48

SINAMICS parameters
Note: In encoderless operation, the speed actual value is calculated and can be smoothed using p1451.
For operation with encoder, r0063 is smoothed with p1441.
The speed actual value is available smoothed (r0021, r0022) and unsmoothed (r0061).
r0064 CO: Speed controller system deviation / n_ctrl system dev
SERVO_828,
SERVO_COMBI
Description: Displays the actual system deviation of the speed controller.
Note: In servo control mode with active reference model, the system deviation to the P component of the speed controller is
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5040, 6040
P-Group: Displays, signals Units group: 3_1 Unit selection: p0505
Not for motor type: - Scaling: p2000 Expert list: 1
Min Max Factory setting
- [rpm] - [rpm] - [rpm]
displayed.
r0065 Slip frequency / f_Slip
SERVO_828,
SERVO_COMBI
Description: Displays the slip frequency for induction motors (ASM).
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1710, 6310,
6727, 6730, 6732
P-Group: Displays, signals Units group: 2_1 Unit selection: p0505
Not for motor type: - Scaling: p2000 Expert list: 1
Min Max Factory setting
- [Hz] - [Hz] - [Hz]
r0066[0...1] CO: Line frequency / f_line
A_INF_828,
S_INF_828,
S_INF_COMBI
Description: Displays the line frequency.
Index: [0] = Unsmoothed
Dependency: Refer to: r0024
Note: The line frequency is also available with an adjustable smoothing (r0024).
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8850, 8864,
P-Group: Displays, signals Units group: 2_1 Unit selection: p0505
Not for motor type: - Scaling: p2000 Expert list: 1
Min Max Factory setting
- [Hz] - [Hz] - [Hz]
Re index 0:
Displays the instantaneous value of the line supply PLL.
Re index 1:
Displays the values smoothed with a time constant of 50 ms to monitor the frequency.
[1] = Smoothed
A positive sign of the frequency is obtained when the line supply phases U, V, W are connected with the correct phase
sequence.
A negative sign of the frequency is obtained when the 3 line phases are interchanged therefore designating a negative
direction of the rotating field of the 3-phase line supply voltage.
8950, 8964
48
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 49

SINAMICS parameters
r0066 CO: Output frequency / f_outp
SERVO_828,
SERVO_COMBI
Description: Displays the Motor Module output frequency.
Dependency: Refer to: r0024
Note: The output frequency is available smoothed (r0024) and unsmoothed (r0066).
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1690, 5300,
5730, 6310, 6730, 6731, 6799
P-Group: Displays, signals Units group: 2_1 Unit selection: p0505
Not for motor type: - Scaling: p2000 Expert list: 1
Min Max Factory setting
- [Hz] - [Hz] - [Hz]
r0067[0...1] Absolute current value permissible / I_abs val perm
A_INF_828,
S_INF_828,
S_INF_COMBI
Description: Displays the actual permissible absolute line-side current.
Index: [0] = Motor mode
Dependency: The permissible current is the minimum from the maximum converter current (r0209), the parameterized current limits
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: -
P-Group: Displays, signals Units group: 6_2 Unit selection: p0505
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [Arms] - [Arms] - [Arms]
[1] = Regenerative mode
(p3530 to p3533) as well as the maximum permissible current of line filter (r3534).
Refer to: p3530, p3531, r3534
r0067 CO: Output current, maximum / I_outp max
SERVO_828,
SERVO_COMBI
Description: Displays the maximum output current of the Motor Module.
Dependency: The maximum output current is determined by the parameterized current limit and the motor and converter thermal
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5722, 6300,
6640, 6724
P-Group: Displays, signals Units group: 6_2 Unit selection: p0505
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [Arms] - [Arms] - [Arms]
protection.
Refer to: p0290, p0640
r0068 CO: Absolute current actual value / I_act abs val
A_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI
Description: Displays actual absolute current.
Dependency: Refer to: r0027
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5730, 7017,
8014, 8017, 8850, 8950
P-Group: Displays, signals Units group: 6_2 Unit selection: p0505
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [Arms] - [Arms] - [Arms]
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
49
Page 50

SINAMICS parameters
Notice: For A_INF, S_INF the following applies:
The value is updated with the current controller sampling time.
The following applies for SERVO:
The value is updated with a sampling time of 1 ms.
Note: Absolute current value = sqrt(Iq^2 + Id^2)
The absolute current actual value is available smoothed (r0027) and unsmoothed (r0068).
r0068 CO: DC current in the DC link / Idc DC link
B_INF_828 Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8014, 8750
P-Group: Displays, signals Units group: 6_4 Unit selection: p0505
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [A] - [A] - [A]
Description: Displays the DC current in the DC link.
Dependency: Refer to: r0027
Notice: For Basic Line Modules of chassis format, the displayed value is invalid as these units do not have any current sens-
ing.
Note: The DC current in the DC link is available smoothed (r0027) and unsmoothed (r0068).
r0069[0...6] CO: Phase current actual value / I_phase act value
A_INF_828,
S_INF_828,
S_INF_COMBI
Description: Displays the measured actual phase currents as peak value.
Index: [0] = Phase U
Note: In indices 3 ... 5, the offset currents of the 3 phases, which are added to correct the phase currents, are displayed.
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1630, 5730,
6714, 6730, 6731, 8850, 8950
P-Group: Displays, signals Units group: 6_5 Unit selection: p0505
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [A] - [A] - [A]
[1] = Phase V
[2] = Phase W
[3] = Phase U offset
[4] = Phase V offset
[5] = Phase W offset
[6] = Total U, V, W
The sum of the 3 corrected phase currents is displayed in index 6.
r0069[0...6] Phase current actual value / I_phase act value
SERVO_828,
SERVO_COMBI
Description: Displays the measured actual phase currents as peak value.
Index: [0] = Phase U
50
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1630, 5730,
P-Group: Displays, signals Units group: 6_5 Unit selection: p0505
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [A] - [A] - [A]
[1] = Phase V
[2] = Phase W
[3] = Phase U offset
6714, 6730, 6731, 8850, 8950
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 51

SINAMICS parameters
[4] = Phase V offset
[5] = Phase W offset
[6] = Total U, V, W
Note: In indices 3 ... 5, the offset currents of the 3 phases, which are added to correct the phase currents, are displayed.
The sum of the 3 corrected phase currents is displayed in index 6.
r0070 CO: Actual DC link voltage / Vdc act val
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI
Description: Displays the measured actual value of the DC link voltage.
Dependency: Refer to: r0026
Note: The DC link voltage is available smoothed (r0026) and unsmoothed (r0070).
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1774, 8750,
8850, 8864, 8940, 8950, 8964
P-Group: Displays, signals Units group: 5_2 Unit selection: p0505
Not for motor type: - Scaling: p2001 Expert list: 1
Min Max Factory setting
- [V] - [V] - [V]
r0070 CO: Actual DC link voltage / Vdc act val
SERVO_828,
SERVO_COMBI
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5730
P-Group: Displays, signals Units group: 5_2 Unit selection: p0505
Not for motor type: - Scaling: p2001 Expert list: 1
Min Max Factory setting
- [V] - [V] - [V]
Description: Displays the measured actual value of the DC link voltage.
Dependency: Refer to: r0026
Notice: For SINAMICS S120 AC Drive (AC/AC) the following applies:
When measuring a DC link voltage < 200 V, for the Power Module (e.g. PM340) a valid measured value is not supplied. In this case, when an external 24V power supply is connected, a value of approx. 24 V is displayed.
Note: The DC link voltage is available smoothed (r0026) and unsmoothed (r0070).
r0072[0...3] CO: Input voltage / U_input
A_INF_828,
S_INF_828,
S_INF_COMBI
Description: Displays the actual power unit input voltage (Line Module).
Index: [0] = Voltage at input terminals of power unit from line supply model
Note: The input voltages are available smoothed (r0025) and unsmoothed (r0072).
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8850, 8950
P-Group: Displays, signals Units group: 5_1 Unit selection: p0505
Not for motor type: - Scaling: p2001 Expert list: 1
Min Max Factory setting
- [Vrms] - [Vrms] - [Vrms]
[1] = Voltage at VSM or at input terminals of the line filter
[2] = Voltage of the voltage source from the line supply model
[3] = Smoothed voltage of voltage source from line supply model
r0072[0]:
Displays the pulsed voltage at the line supply input terminals of the power unit. The value is calculated from the modulation depth (r0074) and is therefore only correct in the closed-loop controlled mode and when the pulses are enabled.
r0072[1]:
Displays the absolute voltage at the input terminals of the line filter or the connection point of a Voltage Sensing Module (VSM). The value is calculated from the VSM measured values r3661 and r3662 and is therefore equal to 0 if a
VSM is not connected.
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
51
Page 52

SINAMICS parameters
r0072[2]:
Displays the estimated value for the voltage of the voltage source that is calculated in the voltage model of the line supply PLL. (input quantities of the model are the measured values of the line currents and the DC link voltage as well as
the characteristics of the line filter p0225, p0226 as well as the line inductance p3424).
r0072[3]:
Displays the smoothed value for the source voltage in r0072[2]. The PT1 smoothing time constant is set in p3472.
r0072 CO: Output voltage / U_output
SERVO_828,
SERVO_COMBI
Description: Displays the actual power unit output voltage (Motor Module).
Dependency: Refer to: r0025
Note: The output voltage is available smoothed (r0025) and unsmoothed (r0072).
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1630, 5730,
6730, 6731, 6799
P-Group: Displays, signals Units group: 5_1 Unit selection: p0505
Not for motor type: - Scaling: p2001 Expert list: 1
Min Max Factory setting
- [Vrms] - [Vrms] - [Vrms]
r0074 CO: Modulat_depth / Modulat_depth
A_INF_828,
SERVO_828,
SERVO_COMBI
Description: Displays the actual modulation depth.
Dependency: Refer to: r0028
Note: For space vector modulation, 100% corresponds to the maximum output voltage without overcontrol.
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5730, 6730,
6731, 6799, 8940, 8950
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: PERCENT Expert list: 1
Min Max Factory setting
- [%] - [%] - [%]
Values above 100 % indicate an overcontrol condition - values below 100% have no overcontrol.
The phase voltage (phase-to-phase, rms) is calculated as follows:(r0074 x r0070) / (sqrt(2) x 100 %).
The modulation depth is available smoothed (r0028) and unsmoothed (r0074).
r0075 CO: Reactive current setpoint / I_react_set
A_INF_828 Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8946
P-Group: Displays, signals Units group: 6_2 Unit selection: p0505
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [Arms] - [Arms] - [Arms]
Description: Displays the reactive current setpoint.
Dependency: Refer to: r3471, p3610
Note: The reactive current requirement of a line filter should be covered by the controlled infeed/regenerative feedback so
52
that the converter always operates with a power factor of 1 compared to the line. Setpoint r0075 includes the reactive
current for a line filter that depends on the actual operating point (r3471).
If the line phases are reversed and the line voltage therefore has a negative orientation (r0066 < 0), it should be noted
that the sign of the reactive current is reversed.
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 53

r0075 CO: Current setpoint field-generating / Id_set
SERVO_828,
SERVO_COMBI
Description: Displays the field-generating current setpoint (Id_set).
Note: This value is irrelevant for the U/f control mode.
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1630, 5714,
5722, 6714
P-Group: Displays, signals Units group: 6_2 Unit selection: p0505
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [Arms] - [Arms] - [Arms]
r0076 CO: Reactive current actual value / I_reactive_act
A_INF_828,
S_INF_828,
S_INF_COMBI
Description: Displays the reactive current actual value.
Dependency: Refer to: r0029, r0075
Note: The reactive current actual value is available smoothed (r0029) and unsmoothed (r0076).
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1774, 1775,
8850, 8946, 8950
P-Group: Displays, signals Units group: 6_2 Unit selection: p0505
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [Arms] - [Arms] - [Arms]
SINAMICS parameters
r0076 CO: Current actual value field-generating / Id_act
SERVO_828,
SERVO_COMBI
Description: Displays the field-generating current actual value (Id_act).
Dependency: Refer to: r0029
Note: This value is irrelevant for the U/f control mode.
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1630, 1710,
5714, 5730, 6714, 6799
P-Group: Displays, signals Units group: 6_2 Unit selection: p0505
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [Arms] - [Arms] - [Arms]
The field-generating current actual value is available smoothed (r0029) and unsmoothed (r0076).
r0077 CO: Active current setpoint / I_active_set
A_INF_828 Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1774, 8940,
8946
P-Group: Displays, signals Units group: 6_2 Unit selection: p0505
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [Arms] - [Arms] - [Arms]
Description: Displays the active current setpoint (Iq_set).
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
53
Page 54

SINAMICS parameters
r0077 CO: Current setpoint torque-generating / Iq_set
SERVO_828,
SERVO_COMBI
Description: Displays the torque/force generating current setpoint.
Note: This value is irrelevant for the U/f control mode.
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1630, 1774,
5714, 6710, 6714, 6719
P-Group: Displays, signals Units group: 6_2 Unit selection: p0505
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [Arms] - [Arms] - [Arms]
r0078 CO: Active current actual value / I_active_act
A_INF_828,
S_INF_828,
S_INF_COMBI
Description: Displays the actual value for the active current.
Dependency: Refer to: r0030
Note: The active current actual value is available smoothed (r0030) and unsmoothed (r0078).
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1774, 1775,
8850, 8946, 8950
P-Group: Displays, signals Units group: 6_2 Unit selection: p0505
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [Arms] - [Arms] - [Arms]
r0078[0...1] CO: Current actual value torque-generating / Iq_act
SERVO_828,
SERVO_COMBI
Description: Displays the torque-generating current actual value (Iq_act).
Index: [0] = Unsmoothed
Dependency: Refer to: r0030, p0045
Note: These values are irrelevant for the U/f control mode.
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1630, 5714,
5730
P-Group: Displays, signals Units group: 6_2 Unit selection: p0505
Not for motor type: - Scaling: p2002 Expert list: 1
Min Max Factory setting
- [Arms] - [Arms] - [Arms]
[1] = Smoothed with p0045
The torque-generating current actual value is available smoothed (r0030 with 100 ms, r0078[1] with p0045) and
unsmoothed (r0078[0]).
r0079[0...1] CO: Torque setpoint total / M_set total
SERVO_828,
SERVO_COMBI
Description: Displays the torque setpoint at the output of the speed controller (before clock cycle interpolation).
Index: [0] = Unsmoothed
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5610, 8012
P-Group: Displays, signals Units group: 7_1 Unit selection: p0505
Not for motor type: - Scaling: p2003 Expert list: 1
Min Max Factory setting
- [Nm] - [Nm] - [Nm]
[1] = Smoothed with p0045
54
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 55

r0080 CO: Torque actual value / M_act
SERVO_828,
SERVO_COMBI
Description: Displays the actual torque value.
Dependency: Refer to: r0031
Note: The torque actual value is available smoothed (r0031) and unsmoothed (r0080).
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5730
P-Group: Displays, signals Units group: 7_1 Unit selection: p0505
Not for motor type: - Scaling: p2003 Expert list: 1
Min Max Factory setting
- [Nm] - [Nm] - [Nm]
r0081 CO: Torque utilization / M_Utilization
SERVO_828,
SERVO_COMBI
Description: Displays the torque utilization as a percentage.
Dependency: Refer to: r0033
Note: The torque utilization is available smoothed (r0033) and unsmoothed (r0081).
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8012
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: PERCENT Expert list: 1
Min Max Factory setting
- [%] - [%] - [%]
The torque utilization is obtained from the required smoothed torque referred to the torque limit.
The torque utilization is obtained from the required torque referred to the torque limit as follows:
- Positive torque: r0081 = ((r0079 + p1532) / (r1538 - p1532)) * 100 %
- Negative torque: r0081 = ((-r0079 + p1532) / (-r1539 + p1532)) * 100 %
The calculation of the torque utilization depends on the selected smoothing time constant (p0045).
SINAMICS parameters
r0082 CO: Active power actual value / P_act
A_INF_828,
S_INF_828,
S_INF_COMBI
Description: Displays the instantaneous active power.
Dependency: Refer to: r0032
Note: The active power is available smoothed (r0032) and unsmoothed (r0082).
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8750, 8850,
8950
P-Group: Displays, signals Units group: 14_7 Unit selection: p0505
Not for motor type: - Scaling: r2004 Expert list: 1
Min Max Factory setting
- [kW] - [kW] - [kW]
r0082 CO: Active power actual value / P_act
B_INF_828 Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8750, 8850,
P-Group: Displays, signals Units group: 14_7 Unit selection: p0505
Not for motor type: - Scaling: r2004 Expert list: 1
Min Max Factory setting
- [kW] - [kW] - [kW]
Description: Displays the instantaneous active power.
Dependency: Refer to: r0032
8950
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
55
Page 56

SINAMICS parameters
Notice: For Basic Line Modules of chassis format, the displayed value is invalid as these units do not have any current sens-
Note: The active power is available smoothed (r0032) and unsmoothed (r0082).
ing.
r0082[0...2] CO: Active power actual value / P_act
SERVO_828,
SERVO_COMBI
Description: Displays the instantaneous active power.
Index: [0] = Unsmoothed
Dependency: Refer to: r0032
Note: The mechanical active power is available smoothed (r0032 with 100 ms, r0082[1] with p0045) and unsmoothed
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5730
P-Group: Displays, signals Units group: 14_5 Unit selection: p0505
Not for motor type: - Scaling: r2004 Expert list: 1
Min Max Factory setting
- [kW] - [kW] - [kW]
[1] = Smoothed with p0045
[2] = Electric power
(r0082[0]).
r0083 CO: Flux setpoint / Flex setp
SERVO_828,
SERVO_COMBI
Description: Displays the flux setpoint.
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5722
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: PERCENT Expert list: 1
Min Max Factory setting
- [%] - [%] - [%]
r0084 CO: Flux actual value / Flux act val
SERVO_828,
SERVO_COMBI
Description: Displays the flux actual value.
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 5722
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: PERCENT Expert list: 1
Min Max Factory setting
- [%] - [%] - [%]
r0088 CO: DC link voltage setpoint / Vdc setpoint
A_INF_828 Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8940, 8964
P-Group: Displays, signals Units group: 5_2 Unit selection: p0505
Not for motor type: - Scaling: p2001 Expert list: 1
Min Max Factory setting
- [V] - [V] - [V]
Description: Displays the setpoint for the DC link voltage.
56
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 57

SINAMICS parameters
r0089[0...2] Actual phase voltage / U_phase act val
SERVO_828,
SERVO_COMBI
Description: Displays the actual phase voltage.
Index: [0] = Phase U
Note: The values are determined from the transistor power-on duration.
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 6719
P-Group: Displays, signals Units group: 5_3 Unit selection: p0505
Not for motor type: - Scaling: p2001 Expert list: 1
Min Max Factory setting
- [V] - [V] - [V]
[1] = Phase V
[2] = Phase W
p0092 Clock synchronous operation pre-assignment/check / Clock sync op
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: Setting to pre-assign/check the sampling times for the internal controller clock cycles for clock-synchronous PROFId-
Value: 0: No isochronous PROFIBUS
Dependency: Refer to: r0110, p0115
Caution: Only current controller clock cycles (p0115[0]) which are integers of 125 µs are permitted for isochronous mode.
Can be changed: C1(1) Calculated: - Access level: 1
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 1 1
rive operation.
Re p0092 = 1:
The controller clock cycles are set so that clock synchronous PROFIdrive operation is possible. If it is not possible to
change the controller clock cycles of the clock-cycle synchronous PROFIdrive operation, then an appropriate message
is output.
The pre-setting of the controller clock cycles can result in a derating of the Motor Module (e.g. p0115[0] = 400 µs -->
375 µs).
When calculating the drive unit utilization (r9976), when using the fixed DCC runtime groups "Receive AFTER IF1
PROFIdrive PZD", "Send BEFORE IF1 PROFIdrive PZD", "Receive AFTER IF2 PZD" (from V4.4) and "Send BEFORE
IF2 PZD" (from V4.4), then its maximum computing time load has already been calculated during ramp-up for isochronous operation and taken into account in r9976 (from V4.3).
Re p0092 = 0:
The controller clock cycles are set without any restrictions by the clock-cycle PROFIdrive operation (same as for up to
V2.3).
When calculating the drive unit utilization (r9976), when using the fixed DCC runtime groups "Receive AFTER IF1
PROFIdrive PZD", "Send BEFORE IF1 PROFIdrive PZD", "Receive AFTER IF2 PZD" (from V4.4) and "Send BEFORE
IF2 PZD" (from V4.4), then its maximum computing time load has already been calculated during ramp-up for isochronous operation and taken into account in r9976 (from V4.3).
1: Isochronous PROFIBUS
Refer to: A01223, A01224
In addition, current controller clock cycles 31.25 µs and 62.5 µs are possible.
Notice: p0092 only affects the automatic default for the clock cycles (p0115) in the drive. If the clock cycles are modified sub-
sequently in expert mode (p0112 = 0), p0092 = 0 should be set so that the new values are not overwritten again by the
automatic default when the parameters are downloaded.
The conditions for current controller clock cycle for isosynchronous operation must still be carefully ensured (refer
under Caution!).
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
57
Page 58

SINAMICS parameters
r0093 CO: Pole position angle electrically scaled / Pole pos el scale
SERVO_828,
SERVO_COMBI
Description: Displays the scaled electrical pole position angle.
Dependency: Refer to: r0094, p0431, r1778
Notice: When the pole position angle (r0093) is output via test socket Tx (x = 0, 1, 2) to adjust the encoder (to determine the
Note: For operation with encoder and pulse suppression, the following applies:
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 4710
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: p2005 Expert list: 1
Min Max Factory setting
- [°] - [°] - [°]
angular commutation offset) the test socket being used must be parameterized as follows:
p0771[x] = r0093
p0777[x] = 0 %
p0778[x] = 0 V
p0779[x] = 400 %
p0780[x] = 4 V
p0783[x] = 0 V
p0784[x] = 0
For p1821 = 1 (counter-clockwise direction of rotation) the following applies:
In order to adjust the encoder using the EMF method, the value, determined using the oscilloscope, must be inverted
and then entered in p0431.
- the value is generated from r0094 + 180 °.
- this angle can be used to adjust the encoders of synchronous motors.
For pulse enable, the following applies:
- the value indicates the transformation angle used by the control + 180 °.
- this value is, contrary to r0094, also applicable (provides information) for encoderless operation and after a pole position identification routine.
r0094 CO: Transformation angle / Transformat_angle
A_INF_828,
S_INF_828,
S_INF_COMBI
Description: Displays the transformation angle.
Note: The transformation angle corresponds to the line supply angle.
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8850, 8950
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: p2005 Expert list: 1
Min Max Factory setting
- [°] - [°] - [°]
r0094 CO: Transformation angle / Transformat_angle
SERVO_828,
SERVO_COMBI
Description: Displays the transformation angle.
Dependency: Refer to: r0093, p0431, r1778
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 1580, 1680,
P-Group: Displays, signals Units group: - Unit selection: -
Not for motor type: - Scaling: p2005 Expert list: 1
Min Max Factory setting
- [°] - [°] - [°]
1690, 4710, 6714, 6730, 6731,
6732
58
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 59

Note: The transformation angle corresponds to the electrical commutation angle.
If no pole position identification is carried out (p1982), and the encoder is adjusted, the following applies:
The encoder supplies the value and indicates the electrical angle of the flux position (d axis).
p0097 Select drive object type / Select DO type
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: Executes an automatic device configuration.
Value: 0: No selection
Dependency: Refer to: r0098, p0099
Note: For p0097 = 0, p0099 is automatically set to the factory setting.
Can be changed: C1(1) Calculated: - Access level: 1
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: Topology Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 24 0
In so doing, p0099, p0107 and p0108 are appropriately set.
1: Drive object type SERVO
2: Drive object type VECTOR
3: SINAMICS GM (DFEMV & VECTORMV)
4: SINAMICS SM (AFEMV & VECTORMV)
5: SINAMICS GL (VECTORGL)
6: SINAMICS SL (VECTORSL)
12: Drive object type VECTOR parallel circuit
13: Drive object type VECTORMV - GM parallel circuit
14: Drive object type VECTORMV - SM parallel circuit
15: Drive object type DC_CTRL
16: Drive object type SERVO HMI
17: Drive object type VECTOR HMI
24: Drive object type VECTORMV - SM parallel circuit
Refer to: A01330
The possible settings are dependent upon the device type.
SINAMICS parameters
r0098[0...5] Actual device topology / Device_act topo
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: Displays the automatically detected actual device topology in coded form.
Index: [0] = DRIVE-CLiQ socket X100
Dependency: Refer to: p0097, p0099
Note: Topology coding: abcd efgh hex
Can be changed: - Calculated: - Access level: 1
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: Topology Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
[1] = DRIVE-CLiQ socket X101
[2] = DRIVE-CLiQ socket X102
[3] = DRIVE-CLiQ socket X103
[4] = DRIVE-CLiQ socket X104
[5] = DRIVE-CLiQ socket X105
a = number of Active Line Modules
b = number of Motor Modules
c = number of motors
d = number of encoders (or the line supply voltage sensing for Active Line Modules)
e = number of additional encoders (or the line supply voltage sensing for Active Line Modules)
f = number of Terminal Modules
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
59
Page 60

SINAMICS parameters
g = number of Terminal Boards
h = reserved
if the value 0 is displayed in all indices, then components are not detected via DRIVE-CLiQ.
If a value F hex occurs at a position of the coding (abcd efgh hex), then an overflow has occurred.
p0099[0...5] Device target topology / Device_target topo
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: Sets the device target topology in coded form (refer to r0098). The setting is made during commissioning.
Index: [0] = DRIVE-CLiQ socket X100
Dependency: The parameter can only be written into for p0097 = 0.
Note: The parameter can only be set to the values 0, the value of the actual device topology, the value of the actual device
Can be changed: C1(1) Calculated: - Access level: 1
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: Topology Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0000 hex FFFF FFFF hex 0000 hex
De-activated or non-available components are also counted
[1] = DRIVE-CLiQ socket X101
[2] = DRIVE-CLiQ socket X102
[3] = DRIVE-CLiQ socket X103
[4] = DRIVE-CLiQ socket X104
[5] = DRIVE-CLiQ socket X105
To perform an automatic device configuration run, an index of the device target topology must be set to the value of the
device actual topology in r0098 for acknowledgement. An index of the device actual topology with a value other than 0
must be selected.
Refer to: p0097, r0098
Refer to: A01330
target topology and FFFFFFFF hex.
If the value 0 is displayed in all of the indices, then the system has still not been commissioned.
The value FFFFFFFF hex indicates that the topology was not generated by the automatic device configuration but was
commissioned using the commissioning software (e.g. using parameter download).
p0100 IEC/NEMA mot stds / IEC/NEMA mot stds
SERVO_COMBI Can be changed: C2(1) Calculated: - Access level: 3
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: Converter Units group: - Unit selection: -
Not for motor type: FEM Scaling: - Expert list: 1
Min Max Factory setting
0 1 0
Description: Defines whether the motor and drive converter power settings (e.g. rated motor power, p0307) are expressed in [kW]
or [hp].
Depending on the selection, the rated motor frequency (p0310) is either set to 50 Hz or 60 Hz.
For p0100 = 0, the following applies: The power factor (p0308) should be parameterized.
For p0100 = 1, the following applies: The efficiency (p0309) should be parameterized.
Value: 0: IEC-Motor (50 Hz, SI units)
Dependency: If p0100 is changed, all of the rated motor parameters are reset. Only then are possible unit changeovers made.
Note: The parameter can only be changed for vector control (p0107).
1: NEMA motor (60 Hz, US units)
The units of all motor parameters are changed that are involved in the selection of IEC or NEMA (e.g. r0206, p0307,
p0316, r0333, r0334, p0341, p0344, r1493, r1969).
Refer to: r0206, p0210, p0300, p0304, p0305, p0307, p0308, p0310, p0311, p0312, p0314, p0320, p0322, p0323,
p0335, r0336, r0337, p0338, p1800
The parameter value is not reset when the factory setting is restored (p0010 = 30, p0970).
60
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 61

SINAMICS parameters
p0101[0...23] Drive object numbers / DO numbers
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: The parameter contains the object number via which every drive object can be addressed.
Index: [0] = Drive object number Control Unit
Note: The numbers are automatically assigned once and can no longer be changed as long as the object has not been
Can be changed: C1(1) Calculated: - Access level: 2
Data type: Unsigned16 Dynamic index: - Func. diagram: -
P-Group: Topology Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 62 0
The number of an existing drive object is entered into each index.
Value = 0: No drive object is defined.
[1] = Drive object number object 1
[2] = Drive object number object 2
[3] = Drive object number object 3
[4] = Drive object number object 4
[5] = Drive object number object 5
[6] = Drive object number object 6
[7] = Drive object number object 7
[8] = Drive object number object 8
[9] = Drive object number object 9
[10] = Drive object number object 10
[11] = Drive object number object 11
[12] = Drive object number object 12
[13] = Drive object number object 13
[14] = Drive object number object 14
[15] = Drive object number object 15
[16] = Drive object number object 16
[17] = Drive object number object 17
[18] = Drive object number object 18
[19] = Drive object number object 19
[20] = Drive object number object 20
[21] = Drive object number object 21
[22] = Drive object number object 22
[23] = Drive object number object 23
deleted.
In the commissioning software, this object number cannot be entered using the expert list, but is automatically
assigned when inserting an object.
r0102[0...1] Number of drive objects / DO count
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: Displays the number of existing or existing and prepared drive objects.
Index: [0] = Existing drive objects
Dependency: Refer to: p0101
Note: The numbers of the drive objects are in p0101.
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Can be changed: - Calculated: - Access level: 2
Data type: Unsigned16 Dynamic index: - Func. diagram: -
P-Group: Topology Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
[1] = Existing and prepared drive objects
Index 0:
Displays the number of drive objects that have already been set up.
61
Page 62

SINAMICS parameters
Index 1:
Displays the number of drive objects that have already been set up and, in addition, the drive objects that still have to
be set up.
r0103 Application-specific view / Appl_spec view
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI
Description: Displays the application-specific view of the individual drive object.
Dependency: Refer to: p0107, r0107
Can be changed: - Calculated: - Access level: 2
Data type: Unsigned16 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 65535 -
p0103[0...23] Application-specific view / Appl_spec view
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: The application-specific view of an existing drive object is entered into each index.
Dependency: Refer to: p0107, r0107
Note: In the non-volatile memory, the application-specific views are defined in files with the following structure:
Can be changed: C1(2) Calculated: - Access level: 2
Data type: Unsigned16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 999 0
The parameter cannot be changed.
PDxxxyyy.ACX
xxx: Application-specific view (p0103)
yyy: Type of drive object (p0107)
Example:
PD052011.ACX
--> "011" stands for the drive object, type SERVO
--> "052" is the number of the view for this drive object
p0105 Activate/de-activate drive object / DO act/deact
A_INF_828,
B_INF_828,
CU_LINK, HUB,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI,
TM120, TM150
Description: Setting to activate/de-activate a drive object.
Value: 0: De-activate drive object
Recommend.: After inserting all of the components of a drive object, before activating, first wait for Alarm A01316.
Dependency: Refer to: r0106
62
Can be changed: T Calculated: - Access level: 2
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 2 1
1: Activate drive object
2: Drive object, de-activate and not present
Refer to: A01314, A01316
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 63

Caution: When activating drive objects with the safety functions enabled, the following applies:
After reactivating, a warm restart (p0009 = 30, p0976 = 2, 3) or POWER ON should be carried out.
Notice: The following applies when activating:
If components are inserted for the first time and the appropriate drive object is activated, then the drive system is automatically booted. To do this, the pulses of all of the drive objects must be suppressed.
Note: Re value = 0, 2:
When a drive object is deactivated it no longer outputs any errors.
If value = 0:
All components of the drive object were completely commissioned and are deactivated using this value. They can be
removed from the DRIVE-CLiQ without any error.
If value = 1:
All components of the drive object must be available for error-free operation.
If value = 2:
Components of a drive object in a project generated offline and set to this value must never be inserted in the actual
topology from the very start. This means that the components are marked to be bypassed in the DRIVE-CLiQ line.
For components that comprise several individual components (e.g. Double Motor Modules), it is not permissible to set
just one subset to this value.
p0105 Activate/de-activate drive object / DO act/deact
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: Setting to activate/de-activate a drive object.
Value: 0: De-activate drive object
Dependency: Refer to: r0106
Notice: The following applies when activating:
Can be changed: U, T Calculated: - Access level: 2
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 1 1
1: Activate drive object
If components are inserted for the first time and the appropriate drive object is activated, then the drive system is automatically booted. To do this, the pulses of all of the drive objects must be suppressed.
SINAMICS parameters
p0105 Activate/de-activate drive object / DO act/deact
TM54F_MA,
TM54F_SL
Description: Setting to activate/de-activate a drive object.
Value: 0: De-activate drive object
Recommend.: After inserting all of the components of a drive object, before activating, first wait for Alarm A01316.
Dependency: Refer to: r0106
Caution: TM54F can only be de-activated if all of the drives assigned to it via P10010 have been de-activated or safety on the
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Can be changed: T Calculated: - Access level: 3
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 2 1
1: Activate drive object
2: Drive object, de-activate and not present
Refer to: A01314, A01316
assigned drives has not be enabled.
When activating drive objects with the safety functions enabled, the following applies:
After reactivating, a warm restart (p0009 = 30, p0976 = 2, 3) or POWER ON should be carried out.
63
Page 64

SINAMICS parameters
Notice: The following applies when activating:
If components are inserted for the first time and the appropriate drive object is activated, then the drive system is automatically booted. To do this, the pulses of all of the drive objects must be suppressed.
Note: Re value = 0, 2:
When a drive object is deactivated it no longer outputs any errors.
If value = 0:
All components of the drive object were completely commissioned and are deactivated using this value. They can be
removed from the DRIVE-CLiQ without any error.
If value = 1:
All components of the drive object must be available for error-free operation.
If value = 2:
Components of a drive object in a project generated offline and set to this value must never be inserted in the actual
topology from the very start. This means that the components are marked to be bypassed in the DRIVE-CLiQ line.
For components that comprise several individual components (e.g. Double Motor Modules), it is not permissible to set
just one subset to this value.
r0106 Drive object active/inactive / DO act/inact
A_INF_828,
B_INF_828,
CU_I_828,
CU_I_COMBI,
CU_LINK,
CU_NX_828, HUB,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI,
TM120, TM150
Description: Displays the "active/inactive" state of a drive object.
Value: 0: Drive object inactive
Dependency: Refer to: p0105
Can be changed: - Calculated: - Access level: 2
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 1 -
1: Drive object active
r0107 Drive object type / DO type
A_INF_828,
B_INF_828,
CU_LINK, HUB,
S_INF_828,
S_INF_COMBI,
SERVO_828,
TM120, TM150,
TM54F_MA,
TM54F_SL
Description: Displays the type of each drive object.
Value: 0: -
64
Can be changed: - Calculated: - Access level: 2
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 600 -
1: SINAMICS S
2: SINAMICS G
3: SINAMICS I
4: SINAMICS NX/CX32
5: SINAMICS GM
6: SINAMICS DC
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 65

7: SINAMICS GL
9: SINAMICS S110
10: ACTIVE INFEED CONTROL
11: SERVO
12: VECTOR
13: VECTORMV
14: VECTORGL
15: VECTOR3P
16: VECTORSL
17: DC_CTRL
18: VECTORM2C
19: VECTORDM
20: SMART INFEED CONTROL
30: BASIC INFEED CONTROL
35: BRAKE MODULE M2C
40: ACTIVE INFEED CONTROLMV
41: BASIC INFEED CONTROLMV
42: ACTIVE INFEED CONTROLM2C
51: SINAMICS G120 230 (SingleDO-Drive which combines Device+Vector)
52: SINAMICSG120 240_2 (SingleDO-Drive which combines Device+Vector)
54: SINAMICSG120 G120D(SingleDO-Drive which combines Device+Vector)
70: HLA
100: TB30 (Terminal Board)
101: SINAMICS SL
102: SINAMICS MV
150: DRIVE-CLiQ Hub Module
200: TM31 (Terminal Module)
201: TM41 (Terminal Module)
202: TM17 High Feature (Terminal Module)
203: TM15 (Terminal Module)
204: TM15 (Terminal Module for SINAMICS)
205: TM54F - Master (Terminal Module)
206: TM54F - Slave (Terminal Module)
207: TM120 (Terminal Module)
208: TM150 (Terminal Module)
254: CU-LINK
300: ENCODER
600: SINAMICS V60-G2 V80-G2
Dependency: Refer to: p0103, r0103
SINAMICS parameters
p0107[0...23] Drive object type / DO type
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: The type of an existing drive object is entered into each index.
Value: 0: -
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Can be changed: C1(2) Calculated: - Access level: 2
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 600 0
1: SINAMICS S
2: SINAMICS G
3: SINAMICS I
4: SINAMICS NX/CX32
5: SINAMICS GM
6: SINAMICS DC
7: SINAMICS GL
9: SINAMICS S110
65
Page 66

SINAMICS parameters
10: ACTIVE INFEED CONTROL
11: SERVO
12: VECTOR
13: VECTORMV
14: VECTORGL
15: VECTOR3P
16: VECTORSL
17: DC_CTRL
18: VECTORM2C
19: VECTORDM
20: SMART INFEED CONTROL
30: BASIC INFEED CONTROL
35: BRAKE MODULE M2C
40: ACTIVE INFEED CONTROLMV
41: BASIC INFEED CONTROLMV
42: ACTIVE INFEED CONTROLM2C
51: SINAMICS G120 230 (SingleDO-Drive which combines Device+Vector)
52: SINAMICSG120 240_2 (SingleDO-Drive which combines Device+Vector)
54: SINAMICSG120 G120D(SingleDO-Drive which combines Device+Vector)
70: HLA
100: TB30 (Terminal Board)
101: SINAMICS SL
102: SINAMICS MV
150: DRIVE-CLiQ Hub Module
200: TM31 (Terminal Module)
201: TM41 (Terminal Module)
202: TM17 High Feature (Terminal Module)
203: TM15 (Terminal Module)
204: TM15 (Terminal Module for SINAMICS)
205: TM54F - Master (Terminal Module)
206: TM54F - Slave (Terminal Module)
207: TM120 (Terminal Module)
208: TM150 (Terminal Module)
254: CU-LINK
300: ENCODER
600: SINAMICS V60-G2 V80-G2
Index: [0] = Drive object type, Control Unit
[1] = Drive object type, object 1
[2] = Drive object type, object 2
[3] = Drive object type, object 3
[4] = Drive object type, object 4
[5] = Drive object type, object 5
[6] = Drive object type, object 6
[7] = Drive object type, object 7
[8] = Drive object type, object 8
[9] = Drive object type, object 9
[10] = Drive object type, object 10
[11] = Drive object type, object 11
[12] = Drive object type, object 12
[13] = Drive object type, object 13
[14] = Drive object type, object 14
[15] = Drive object type, object 15
[16] = Drive object type, object 16
[17] = Drive object type, object 17
[18] = Drive object type, object 18
[19] = Drive object type, object 19
[20] = Drive object type, object 20
[21] = Drive object type, object 21
[22] = Drive object type, object 22
[23] = Drive object type, object 23
Dependency: Refer to: p0103, r0103
66
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 67

SINAMICS parameters
Caution: If you change this parameter and exit the device commissioning mode, then the complete software will be set up again
Note: The number (p0101) and the associated drive object type are in the same index.
and all of the previous drive parameter settings are deleted.
For SINAMICS S a drive object type can only be changed between SERVO and VECTOR. If you change the parameter and exit drive start-up (p0009 from 2 to 0) the drive parameters are set up again.
r0108 Drive objects, function module / DO function module
A_INF_828 Can be changed: - Calculated: - Access level: 2
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
Description: Displays the activated function module for the particular drive object.
Bit field: Bit Signal name 1 signal 0 signal FP
04 Line transformer / Line transf Activated Not activated 07 Dynamic grid support / Dyn. grid support Activated Not activated 12 Line droop control / Line droop ctrl Activated Not activated 15 Parallel connection / Parallel Activated Not activated 19 Master/Slave / Master/Slave Activated Not activated 26 Braking Module external / Brk Mod ext Activated Not activated 28 Cooling unit / Cool_unit Activated Not activated 31 PROFINET / PROFINET Activated Not activated -
Note: A "function module" is a functional expansion of a drive object that can be activated when commissioning.
r0108 Drive objects, function module / DO function module
B_INF_828,
S_INF_828
Description: Displays the activated function module for the particular drive object.
Bit field: Bit Signal name 1 signal 0 signal FP
Note: A "function module" is a functional expansion of a drive object that can be activated when commissioning.
Can be changed: - Calculated: - Access level: 2
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
15 Parallel connection / Parallel Activated Not activated 26 Braking Module external / Brk Mod ext Activated Not activated 28 Cooling unit / Cool_unit Activated Not activated 31 PROFINET / PROFINET Activated Not activated -
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
67
Page 68

SINAMICS parameters
p0108[0...23] Drive objects, function module / DO function module
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: The function module of an existing drive object is entered into each index (see p0101, p0107).
Index: [0] = Function module Control Unit
Bit field: Bit Signal name 1 signal 0 signal FP
Can be changed: C1(2) Calculated: - Access level: 2
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - 0000 0000 0000 0000 0000
0000 0000 0000 bin
The following bits are available for the Control Unit (Index 0):
Bit 18: Free function blocks
Bit 29: CAN
Bit 30: COMM BOARD
Bit 31: PROFINET
For all other drive objects (Index > 0), the significance of the bits should be taken from the display parameters r0108 of
the drive object.
[1] = Function module object 1
[2] = Function module object 2
[3] = Function module object 3
[4] = Function module object 4
[5] = Function module object 5
[6] = Function module object 6
[7] = Function module object 7
[8] = Function module object 8
[9] = Function module object 9
[10] = Function module object 10
[11] = Function module object 11
[12] = Function module object 12
[13] = Function module object 13
[14] = Function module object 14
[15] = Function module object 15
[16] = Function module object 16
[17] = Function module object 17
[18] = Function module object 18
[19] = Function module object 19
[20] = Function module object 20
[21] = Function module object 21
[22] = Function module object 22
[23] = Function module object 23
00 Bit 0 ON OFF 01 Bit 1 ON OFF 02 Bit 2 ON OFF 03 Bit 3 ON OFF 04 Bit 4 ON OFF 05 Bit 5 ON OFF 06 Bit 6 ON OFF 07 Bit 7 ON OFF 08 Bit 8 ON OFF 09 Bit 9 ON OFF 10 Bit 10 ON OFF 11 Bit 11 ON OFF 12 Bit 12 ON OFF 13 Bit 13 ON OFF 14 Bit 14 ON OFF 15 Bit 15 ON OFF 16 Bit 16 ON OFF -
68
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 69

SINAMICS parameters
17 Bit 17 ON OFF 18 Bit 18 ON OFF 19 Bit 19 ON OFF 20 Bit 20 ON OFF 21 Bit 21 ON OFF 22 Bit 22 ON OFF 23 Bit 23 ON OFF 24 Bit 24 ON OFF 25 Bit 25 ON OFF 26 Bit 26 ON OFF 27 Bit 27 ON OFF 28 Bit 28 ON OFF 29 Bit 29 ON OFF 30 Bit 30 ON OFF 31 Bit 31 ON OFF -
Note: A "function module" is a functional expansion of a drive object that can be activated when commissioning.
r0108 Drive objects, function module / DO function module
S_INF_COMBI Can be changed: - Calculated: - Access level: 2
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
Description: Displays the activated function module for the particular drive object.
Bit field: Bit Signal name 1 signal 0 signal FP
26 Braking Module external / Brk Mod ext Activated Not activated -
Note: A "function module" is a functional expansion of a drive object that can be activated when commissioning.
r0108 Drive objects, function module / DO function module
SERVO_828 Can be changed: - Calculated: - Access level: 2
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
Description: Displays the activated function module for the particular drive object.
Bit field: Bit Signal name 1 signal 0 signal FP
02 Closed-loop speed/torque control / n/M Activated Not activated 07 Advanced Positioning Control (APC) / APC Activated Not activated 09 Extended Stopping and Retraction / ESR Activated Not activated 10 Moment of inertia estimator / J_estimator Activated Not activated 11 Spindle diagnostics / Spin_diag Activated Not activated 13 Safety rotary axis / Safety rot Activated Not activated 22 Cogging torque compensation /
Cog_M_comp
23 Digital inputs/outputs / Dig IO Activated Not activated -
Note: A "function module" is a functional expansion of a drive object that can be activated when commissioning.
Activated Not activated -
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
69
Page 70

SINAMICS parameters
r0108 Drive objects, function module / DO function module
TM120, TM150 Can be changed: - Calculated: - Access level: 2
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
Description: Displays the activated function module for the particular drive object.
Bit field: Bit Signal name 1 signal 0 signal FP
18 Free function blocks / FBLOCKS Activated Not activated 31 PROFINET / PROFINET Activated Not activated -
Note: A "function module" is a functional expansion of a drive object that can be activated when commissioning.
r0110[0...2] Basic sampling times / t_basis
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: Displays the basic sampling times.
Index: [0] = Basic sampling time 0
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0.00 [µs] 10000.00 [µs] - [µs]
The sampling times are set using p0112 and p0115. The values for the basic sampling times are determined as a
result of these settings.
[1] = Basic sampling time 1
[2] = Basic sampling time 2
r0111 Basic sampling time selection / t_basis sel
A_INF_828,
B_INF_828,
CU_I_828,
CU_I_COMBI,
CU_LINK,
CU_NX_828, HUB,
S_INF_828,
S_INF_COMBI,
SERVO_828
Description: Displays the selected basic sampling time for this drive object.
Dependency: Refer to: r0110
Can be changed: - Calculated: - Access level: 3
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 2 -
70
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 71

SINAMICS parameters
p0112 Sampling times pre-setting p0115 / t_sample for p0115
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI
Description: Pre-assignment of the sampling times in p0115.
Value: 0: Expert
Recommend.: When changing the sampling times of the current and speed controllers (also refer to p0115), then we recommend that
Can be changed: C1(3) Calculated: - Access level: 3
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 5 3
The clock cycles for the current controller / speed controller / flux controller / setpoint channel / position controller /
positioning / technology controller are pre-assigned as follows:
SINAMICS S, servo drive:
p0112 = 1: 250 / 250 / 250 / 4000 / 2000 / 8000 / 4000 µs (for chassis units)
p0112 = 2: 125 / 250 / 250 / 4000 / 2000 / 8000 / 4000 µs
p0112 = 3: 125 / 125 / 125 / 4000 / 1000 / 4000 / 4000 µs
p0112 = 4: 62.5 / 62.5 / 62.5 / 1000 / 1000 / 2000 / 1000 µs
p0112 = 5: 31.25 / 31.25 / 31.25 / 1000 / 1000 / 2000 / 1000 µs
SINAMICS S, Active Infeed (p0112 = 1 not for p0092 = 1):
p0112 = 1: 400 / - / - / 1600 µs (pre-setting for the rated pulse frequency = 2.5 kHz)
p0112 = 2: 250 / - / - / 2000 µs (pre-setting for the rated pulse frequency = 4.0 kHz)
p0112 = 3: 125 / - / - / 2000 µs
p0112 = 4: 125 / - / - / 1000 µs
p0112 = 5: 125 / - / - / 500 µs
SINAMICS S, Smart Infeed (p0112 = 1 not for p0092 = 1):
p0112 = 1: 400 / - / - / 1600 µs (pre-setting for the rated pulse frequency = 2.5 kHz)
p0112 = 2: 250 / - / - / 2000 µs (pre-setting for the rated pulse frequency = 4.0 kHz)
p0112 = 3: 250 / - / - / 2000 µs
p0112 = 4: 250 / - / - / 1000 µs
p0112 = 5: Not possible
SINAMICS S, Basic Infeed, booksize:
p0112 = 4: 250 / - / - / 2000 µs
SINAMICS S, Basic Infeed, chassis:
p0112 = 1: 2000 / - / - / 2000 µs
p0112 = 2: 2000 / - / - / 2000 µs (pre-setting)
p0112 = 3: 2000 / - / - / 2000 µs
p0112 = 4: Not possible
p0112 = 5: Not possible
SINAMICS S/G, vector drive (p0112 = 1 not for p0092 = 1 and not for PM340):
p0112 = 1: 400 / 1600 / 1600 / 1600 / 3200 / 3200 / 3200 µs (for rated pulse frequency = 1.25, 2.5 kHz)
p0112 = 2: 250 / 1000 / 2000 / 1000 / 2000 / 4000 / 4000 µs
p0112 = 3: 250 / 1000 / 1000 / 1000 / 2000 / 4000 / 4000 µs (for rated pulse frequency = 2.0, 4.0 kHz)
SINAMICS S, vector drive:
p0112 = 4: 250 / 500 / 1000 / 500 / 1000 / 2000 / 2000 µs
p0112 = 5: 250 / 250 / 1000 / 500 / 1000 / 2000 / 1000 µs
1: xLow
2: Low
3: Standard
4: High
5: xHigh
after exiting commissioning (p0009 = 0) the controller settings are re-calculated using p0340 = 4.
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
71
Page 72

SINAMICS parameters
Dependency: It is prohibited to select a parameter value from p0112 if the associated current controller clock cycle cannot set (e.g.
Note: For p0112 = 0 (expert) the individual sampling times in p0115 can be adjusted.
p0112 = 1 is not possible for a vector drive and PM340 power unit).
If, for a servo drive, p112 = 5 is set, then the pulse frequency p1800 is preassigned 8 kHz. For D410-2 and vector
drive, the current controller sampling time can only be permanently changed for p0112 = 0.
Refer to: p0092
The setting p0112 = 1 cannot be set for a vector drive with power unit type PM340 (refer to r0203).
p0113 Minimum pulse frequency, selection / f_puls min sel
SERVO_828,
SERVO_COMBI
Description: The current controller sampling time (p0115[0]) is pre-assigned by selecting the minimum pulse frequency.
Dependency: The parameter can only be changed with p0112 = 0 (expert). For isochronous operation (p0092 = 1) the parameter can
Note: The current controller sampling time (p0115[0]) is set to the inverse value of twice the minimum pulse frequency. For
Can be changed: C1(3) Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
2.000 [kHz] 4.000 [kHz] 4.000 [kHz]
only be set so that a current controller clock cycle of 125 µs is obtained as an integer number.
The required pulse frequency can be set in p1800 after commissioning (p0009 = p0010 = 0).
Refer to: p0112, r0114, p0115, p1800
p0113 = 2.0 kHz, p0115[0] = 250 µs is set, for p0113 = 4.0 kHz, p0115[0] = 125 µs is set. The current controller sampling time (p0115[0]), calculated from the pulse frequency, is set in a grid of 1.25 µs.
For a power unit type PM340 (refer to r0203), only the values 2.0 and 4.0 kHz can be set.
r0114[0...9] Minimum pulse frequency, recommended / f_puls min recom
SERVO_828,
SERVO_COMBI
Description: Displays the recommended values (indices 0 and 1) for the minimum pulse frequency (p0113).
Index: [0] = If only the actual drive is changed
Dependency: Refer to: p0113
Note: After exiting commissioning (p0009 = p0010 = 0), the pulse frequencies calculated from the sampling time p115[0] are
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- [kHz] - [kHz] - [kHz]
If the system rejects a change to p0113 because the value to be used lies outside the permitted value range, then
instead the recommended value from r0114 can be used.
[1] = If all drives connected to the DRIVE-CLiQ line are changed
[2] = 2. possible pulse frequency
[3] = 3. possible pulse frequency
[4] = 4. possible pulse frequency
[5] = 5. possible pulse frequency
[6] = 6. possible pulse frequency
[7] = 7. possible pulse frequency
[8] = 8. possible pulse frequency
[9] = 9. possible pulse frequency
displayed in indices 1 to 9. If additional restrictions do not apply (e.g. due to having selected an output filter), these can
be entered into p1800. The maximum pulse frequency of the power units was already taken into account in r0114.
A value of 0 kHz does not define a recommended pulse frequency.
72
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 73

SINAMICS parameters
p0115[0...6] Sampling times for internal control loops / t_sample int ctrl
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828
Description: Sets the sampling times for the control loops.
Recommend.: When changing the sampling times of the current and speed controllers (also refer to p0115), then we recommend that
Index: [0] = Current controller
Dependency: The sampling times can only be separately set if p0112 is 0 (expert). If a sampling time is modified in the expert mode,
Note: For function modules that can be activated (e.g. technology controller), the parameters values are pre-assigned.
Can be changed: C1(3) Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0.00 [µs] 16000.00 [µs] [0] 125.00 [µs]
[1] 125.00 [µs]
[2] 125.00 [µs]
[3] 4000.00 [µs]
[4] 1000.00 [µs]
[5] 4000.00 [µs]
[6] 4000.00 [µs]
The default setting is made using p0112 and can only be individually changed for p0112 = 0 (expert).
after exiting commissioning (p0009 = 0) the controller settings are re-calculated using p0340 = 4.
[1] = Speed controller
[2] = Flux controller
[3] = Setpoint channel
[4] = Pos controller
[5] = Positioning
[6] = Technology controller
then all of the sampling times with higher indices are automatically changed in the same ratio as the sampling time
itself was changed. Slower time slices are only taken if the calculated sampling time is also permitted. Upper limit is 8
ms.
Higher-level controls must be calculated in integral ratios to lower-level controls (e.g. p0115[1] = N * p0115[0]; where N
is an integer number). The sampling time of the speed controller (p0115[1]) can have as a maximum a value of 800%
of the current controller sampling time (p0115[0]).
For servo drives, the maximum sampling time of the current controller is 250 µs and for vector drives, 500 µs.
The sampling times for setpoint channel (p0115[3]), position controller (p0115[4]), positioning (p0115[5]) and technology controller (p0115[6]) must have at least 2x the value of the current controller sampling time (p0115[0]).
Refer to: r0110, r0111, p0112
For the Active Line Module (ALM) and Smart Line Module (SLM), the current and DC link voltage controllers operate
with the same sampling time. For ALM/SLM the maximum current controller clock cycle is 400 µs.
For the Basic Line Module (BLM), the DC link voltage measurement operates in the current controller sampling time.
For BLM booksize, only the current controller sampling time of 250 µs is permitted. For BLM chassis, only the current
controller sampling time of 2000 µs is permitted.
For power unit type PM340 (r0203), only current controller sampling times of 62.5 µs, 125 µs, 250 µs and 500 µs can
be set. The maximum current controller clock cycle for servo drives and the minimum current controller clock cycle for
vector drives is 250 µs.
If sampling times in p0115 are individually changed for p0112 = 0 (expert) then it must always be observed that the
selected sampling times of the setpoint channel (p0115[3]), position controller (p0115[4]), positioning (p0115[5]) and
technology controller (p0115[6]) are always greater than or equal to twice the current controller sampling time
(p0115[0]).
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
73
Page 74

SINAMICS parameters
p0115[0] Sampling time for supplementary functions / t_samp suppl_fct
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: Sets the basic sampling time for supplementary functions (DCC, free function blocks) on this object.
Index: [0] = Basic sampl. time
Can be changed: C1(3) Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0.00 [µs] 16000.00 [µs] 4000.00 [µs]
Only setting values that are an integer multiple of 125 µs are permissible.
p0115[0...6] Sampling times for internal control loops / t_sample int ctrl
SERVO_COMBI Can be changed: C1(3) Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0.00 [µs] 16000.00 [µs] [0] 125.00 [µs]
[1] 125.00 [µs]
[2] 125.00 [µs]
[3] 4000.00 [µs]
[4] 1000.00 [µs]
[5] 4000.00 [µs]
[6] 4000.00 [µs]
Description: Sets the sampling times for the control loops.
The default setting is made using p0112 and can only be individually changed for p0112 = 0 (expert).
Recommend.: When changing the sampling times of the current and speed controllers (also refer to p0115), then we recommend that
Index: [0] = Current controller
Dependency: The sampling times can only be separately set if p0112 is 0 (expert). If a sampling time is modified in the expert mode,
Note: For function modules that can be activated (e.g. technology controller), the parameters values are pre-assigned.
after exiting commissioning (p0009 = 0) the controller settings are re-calculated using p0340 = 4.
[1] = Speed controller
[2] = Flux controller
[3] = Setpoint channel
[4] = Pos controller
[5] = Positioning
[6] = Technology controller
then all of the sampling times with higher indices are automatically changed in the same ratio as the sampling time
itself was changed. Slower time slices are only taken if the calculated sampling time is also permitted. Upper limit is 8
ms.
Higher-level controls must be calculated in integral ratios to lower-level controls (e.g. p0115[1] = N * p0115[0]; where N
is an integer number). The sampling time of the speed controller (p0115[1]) can have as a maximum a value of 800%
of the current controller sampling time (p0115[0]).
For servo drives, the maximum sampling time of the current controller is 250 µs and for vector drives, 500 µs.
The sampling times for setpoint channel (p0115[3]), position controller (p0115[4]), positioning (p0115[5]) and technology controller (p0115[6]) must have at least 2x the value of the current controller sampling time (p0115[0]).
Refer to: r0110, r0111, p0112
For the Active Line Module (ALM) and Smart Line Module (SLM), the current and DC link voltage controllers operate
with the same sampling time. For ALM/SLM the maximum current controller clock cycle is 400 µs.
For the Basic Line Module (BLM), the DC link voltage measurement operates in the current controller sampling time.
For BLM booksize, only the current controller sampling time of 250 µs is permitted. For BLM chassis, only the current
controller sampling time of 2000 µs is permitted.
74
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 75

SINAMICS parameters
For power unit type PM340 (r0203), only current controller sampling times of 62.5 µs, 125 µs, 250 µs and 500 µs can
be set. The maximum current controller clock cycle for servo drives and the minimum current controller clock cycle for
vector drives is 250 µs.
If sampling times in p0115 are individually changed for p0112 = 0 (expert) then it must always be observed that the
selected sampling times of the setpoint channel (p0115[3]), position controller (p0115[4]), positioning (p0115[5]) and
technology controller (p0115[6]) are always greater than or equal to twice the current controller sampling time
(p0115[0]).
p0115[0] Sampling time for supplementary functions / t_samp suppl_fct
TM120 Can be changed: C1(3) Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0.00 [µs] 16000.00 [µs] 4000.00 [µs]
Description: Sets the sampling times for supplementary functions (DCC, free function blocks) on this object.
Only setting values that are an integer multiple of 125 µs are permissible.
Index: [0] = Basic sampl. time
p0115[0] Sampling time for supplementary functions / t_samp suppl_fct
TM150 Can be changed: C1(3) Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0.00 [µs] 16000.00 [µs] 4000.00 [µs]
Description: Sets the sampling times for supplementary functions (DCC, free function blocks) on this object.
Only setting values that are an integer multiple of 125 µs are permissible.
Index: [0] = Basic sampl. time
Note: This parameter only applies to set the sampling times of possible supplementary functions.
The sampling times for inputs/outputs must be set in p4099.
r0116[0...1] Drive object clock cycle recommended / DO_clock recom
A_INF_828,
B_INF_828,
CU_I_828,
CU_I_COMBI,
CU_NX_828,
S_INF_828,
S_INF_COMBI
Description: Displays the recommended sampling time for the drive objects.
Index: [0] = Change only for the actual drive object
Dependency: Refer to: p0115
Can be changed: - Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- [µs] - [µs] - [µs]
r00116[0] = recommended sampling time:
Recommended value which would then make the complete system operational.
r00116[1] = recommended sampling time:
Recommended value, which after changing other clock cycles on the DRIVE-CLiQ line, would result in an operational
system.
[1] = Changing all objects on the DRIVE-CLiQ line
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
75
Page 76

SINAMICS parameters
p0117 Current controller computing dead time mode / I_ctrl t_dead mode
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: Sets the mode for the computing dead time of the current controller.
Dependency: Refer to: p0118
Note: The mode change is not effective until the drive unit is powered up again.
Can be changed: U, T Calculated: - Access level: 4
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 6 6
0: Offset (shifted) clocking, minimum computing dead time of each drive, automatic setting
1: Clocking at the same time, the dead time aligns itself to the dead time of the latest drive, automatic setting
2: Manual setting of the computing dead time, early transfer
3: Manual setting of the computing dead time, late transfer
4-6: As for 0-2, however, no early transfers are set for vectors
Refer to: A02100
Re p0117 = 0:
The times when the setpoints become effective for the individual controls is automatically and individually determined.
Another computing dead time is set for each control (closed-loop) (p0118). Current is impressed for the individual controls without any offset with respect to time (improved EMC compatibility).
Re p0117 = 1:
The latest closed-loop control determines when the setpoints for each of the individual controls become active. The
same computing dead time is set for each control (p0118). Current is impressed (flows) for the individual controls without any offset with respect to time.
Re p0117 = 2:
The computing dead time is manually set. The user must optimize the value in p0118.
Re p0117 = 3:
The computing dead time is manually set. The user must optimize the value in p0118.
Re p0117 = 4 ... 6:
Behavior as for p0117 = 0 ... 2, however for vectors, the earliest times are not determined.
p0118 Current controller computing dead time / I_ctrl t_dead
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI
Description: This parameter is pre-set as a function of the current controller sampling time (p0115[0]) and normally does not have to
Dependency: Refer to: p0117
Note: For p0118 <= 0.005 µs, the current controller output is delayed by a complete current controller clock cycle (p0115[0]).
76
Can be changed: U, T Calculated: - Access level: 4
Data type: FloatingPoint32 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0.00 [µs] 2000.00 [µs] 0.00 [µs]
be changed.
Refer to: A02100
After p0118 has been changed, we recommend that the current controller is adapted (p1715).
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 77

SINAMICS parameters
p0120 Number of Power unit Data Sets (PDS) / PDS count
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828
Description: Sets the number of Power unit Data Sets (PDS).
Dependency: Refer to: p0107, r0107
Note: This parameter is only significant for drive objects A_INFEED and VECTOR with a parallel circuit configuration.
Can be changed: C1(3) Calculated: - Access level: 2
Data type: Unsigned8 Dynamic index: - Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
1 8 1
The value corresponds to the number of power units connected together for a parallel circuit configuration.
p0121[0...n] Power unit component number / PU comp_no
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI
Description: The power unit data set is assigned to a power unit using this parameter.
Dependency: Refer to: p0107, r0107
Note: For parallel circuit configurations, the parameter index is assigned to a power unit.
Can be changed: C1(4) Calculated: - Access level: 3
Data type: Unsigned8 Dynamic index: PDS, p0120 Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 199 0
This unique component number is assigned when parameterizing the topology.
Only component numbers can be entered into this parameter that correspond to a power unit.
p0124[0...n] Power unit detection via LED / PU detection LED
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI
Description: Detects the power unit assigned to this drive and data set.
Note: While p0124 = 1, the READY LED flashes green/orange or red/orange with 2 Hz at the appropriate power unit.
Can be changed: U, T Calculated: - Access level: 2
Data type: Unsigned8 Dynamic index: PDS, p0120 Func. diagram: -
P-Group: Converter Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 1 0
For parallel circuit configurations, the parameter index is assigned to a power unit.
p0124[0...23] Main component detection using LED / M_comp detect LED
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: Detection of the main components of the drive object selected via the index.
Can be changed: U, T Calculated: - Access level: 2
Data type: Unsigned8 Dynamic index: - Func. diagram: -
P-Group: Converter Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 1 0
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
77
Page 78

SINAMICS parameters
p0125[0...n] Activate/de-activate power unit components / PU_comp act/deact
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828
Description: Setting to activate/de-activate a power unit component.
Value: 0: De-activate component
Recommend.: After inserting a component, before activating, first wait for Alarm A01317.
Dependency: Refer to: r0126
Caution: For a parallel connection, the following applies:
Caution: It is not permissible to de-activate drive objects with safety functions enabled.
Note: The activation of a component can be rejected if the component was inserted for the first time. In this case, it is only
Can be changed: C1(4), T Calculated: - Access level: 2
Data type: Integer16 Dynamic index: PDS, p0120 Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 2 1
1: Activate component
2: Component, de-activate and not present
Refer to: A01314, A01317
When deactivating individual power units using p0125, it is not permissible that the power units of the parallel connection involved are connected. Infeed units should be disconnected from the line supply (for example, using a contactor).
Motor feeder cables should be disconnected. In addition, defective power units should be disconnected from the DC
link.
possible to activate the component when the pulses for all of the drive objects are inhibited.
For units connected in parallel, when one of the power units is de-activated, then the enable in p7001 is withdrawn.
Re value = 0, 2:
When a component is deactivated it no longer outputs any errors.
If value = 0:
The component was completely commissioned and is deactivated using this value. It can be removed from the DRIVECLiQ without any error.
If value = 1:
The component must be available for error-free operation.
If value = 2:
A component in a project generated offline and set to this value must never be inserted in the actual topology from the
very start. This means that the component is marked to be bypassed in the DRIVE-CLiQ line.
For components that comprise several individual components (e.g. Double Motor Modules), it is not permissible to set
just one subset to this value.
r0126[0...n] Power unit components active/inactive / PU comp act/inact
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI
Description: Displays the "active/inactive" state of a power unit component.
Value: 0: Component inactive
Dependency: Refer to: p0105, p0125, p0897
78
Can be changed: - Calculated: - Access level: 2
Data type: Integer16 Dynamic index: PDS, p0120 Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 1 -
1: Component active
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Parameter description
Page 79

r0127[0...n] Power unit version EPROM data / PU EPROM version
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI
Description: Displays the version of the EPROM data of the power unit.
Dependency: Refer to: r0147, r0157
Note: For parallel circuit configurations, the parameter index is assigned to a power unit.
Can be changed: - Calculated: - Access level: 3
Data type: Unsigned32 Dynamic index: PDS, p0120 Func. diagram: -
P-Group: Converter Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
r0128[0...n] Power unit, firmware version / PU FW version
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI
Description: Displays the firmware version of the power unit.
Dependency: Refer to: r0018, r0148, r0158, r0197, r0198
Note: Example:
Can be changed: - Calculated: - Access level: 3
Data type: Unsigned32 Dynamic index: PDS, p0120 Func. diagram: -
P-Group: Converter Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
The value 1010100 should be interpreted as V01.01.01.00.
For parallel circuit configurations, the parameter index is assigned to a power unit.
SINAMICS parameters
p0130 Number of Motor Data Sets (MDS) / MDS count
SERVO_828,
SERVO_COMBI
Description: Sets the number of Motor Data Sets (MDS).
Can be changed: C1(3) Calculated: - Access level: 2
Data type: Unsigned8 Dynamic index: - Func. diagram: 8575
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
1 16 1
p0131[0...n] Motor component number / Mot comp_no
SERVO_828,
SERVO_COMBI
Description: The motor data set is assigned to a motor using this parameter.
Can be changed: C1(4) Calculated: - Access level: 3
Data type: Unsigned8 Dynamic index: MDS, p0130 Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 199 0
This unique component number is assigned when parameterizing the topology.
Only component numbers can be entered into this parameter that correspond to a motor.
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
79
Page 80

SINAMICS parameters
p0139[0...2] Copy Motor Data Set MDS / Copy MDS
SERVO_828,
SERVO_COMBI
Description: Copying a Motor Data Set (MDS) into another.
Index: [0] = Source motor data set
Note: Procedure:
Can be changed: C2(15) Calculated: - Access level: 2
Data type: Unsigned8 Dynamic index: - Func. diagram: 8575
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 31 0
[1] = Target motor data set
[2] = Start copying procedure
1. In Index 0, enter which motor data set should be copied.
2. In Index 1, enter the motor data set data that is to be copied into.
3. Start copying: Set index 2 from 0 to 1.
p0139[2] is automatically set to 0 when copying is completed.
When copying, p0131 is not taken into account.
p0140 Number of VSM data sets / VSM count
A_INF_828,
S_INF_828
Description: Sets the number of VSM data sets.
Note: The value cannot be changed for infeed units; it corresponds to the number of power units connected in parallel.
Can be changed: C1(3) Calculated: - Access level: 4
Data type: Unsigned8 Dynamic index: - Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
1 8 1
p0140 Number of Encoder Data Sets (EDS) / EDS count
SERVO_828,
SERVO_COMBI
Description: Sets the number of Encoder Data Sets (EDS).
Note: When parameterizing the drive with "no encoder" there must be at least one encoder data set (p0140 >= 1).
Can be changed: C1(3) Calculated: - Access level: 2
Data type: Unsigned8 Dynamic index: - Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
1 16 1
p0141[0...n] VSM component number / VSM comp_no
A_INF_828,
S_INF_828
Description: The VSM data set is assigned to a VSM evaluation using this parameter.
Can be changed: C1(4) Calculated: - Access level: 4
Data type: Unsigned8 Dynamic index: p0140 Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 199 0
This unique component number is assigned when parameterizing the topology.
Only component numbers that correspond to a VSM evaluation can be entered in this parameter.
80
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 81

SINAMICS parameters
p0141[0...n] Encoder interface (Sensor Module) component number / Enc_interf comp_no
SERVO_828,
SERVO_COMBI
Description: This parameter is used to assign the encoder data set to an encoder evaluation (e.g. SMC).
Note: If the encoder evaluation and encoder are integrated (motor with DRIVE-CLiQ), then their component numbers are
Can be changed: C1(4) Calculated: - Access level: 3
Data type: Unsigned8 Dynamic index: EDS, p0140 Func. diagram: 4704, 8570
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 199 0
This unique component number is assigned when parameterizing the topology.
Only component numbers can be entered into this parameter that correspond to an encoder evaluation.
identical.
For an SMC, different component numbers are assigned for the SMC (p0141) and the (actual) encoder (p0142).
p0142[0...n] Encoder component number / Encoder comp_no
SERVO_828,
SERVO_COMBI
Description: This parameter is used to assign the encoder data set to an encoder.
Note: If the encoder evaluation and encoder are integrated (motor with DRIVE-CLiQ), then their component numbers are
Can be changed: C1(4) Calculated: - Access level: 3
Data type: Unsigned8 Dynamic index: EDS, p0140 Func. diagram: 4704
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 199 0
This assignment is made using the unique component number that was assigned when parameterizing the topology.
Only component numbers can be entered into this parameter that correspond to an encoder.
identical.
For an SMC, different component numbers are assigned for the SMC (p0141) and the (actual) encoder (p0142).
p0144[0...n] Voltage Sensing Module detection via LED / VSM detection LED
A_INF_828,
S_INF_828
Description: Detects the Voltage Sensing Module (VSM) module assigned to this infeed.
Can be changed: U, T Calculated: - Access level: 3
Data type: Unsigned8 Dynamic index: p0140 Func. diagram: -
P-Group: Encoder Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 1 0
p0144[0...n] Sensor Module detection via LED / SM detection LED
SERVO_828,
SERVO_COMBI
Description: Detects the Sensor Module assigned to this drive and data set.
Note: While p0144 = 1, the READY LED flashes green/orange or red/orange with 2 Hz at the appropriate Sensor Module.
Can be changed: U, T Calculated: - Access level: 2
Data type: Unsigned8 Dynamic index: EDS, p0140 Func. diagram: -
P-Group: Encoder Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 1 0
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
81
Page 82

SINAMICS parameters
p0145[0...n] Voltage Sensing Module, activate/de-activate / VSM act/deact
A_INF_828,
S_INF_828
Description: Setting to activate/de-activate a Voltage Sensing Module (VSM).
Value: 0: De-activate component
Recommend.: After inserting a component, before activating, first wait for Alarm A01317.
Dependency: Refer to: r0146
Note: For chassis infeeds, it is not possible to activate/de-activate the Voltage Sensing Module (VSM) via p0145. The VSM
Can be changed: C1(4), T Calculated: - Access level: 2
Data type: Integer16 Dynamic index: p0140 Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 2 1
1: Activate component
2: Component, de-activate and not present
Refer to: A01314, A01317
can only be activated/de-activated in the group with the appropriate infeed via p0125[0...n].
The activation of a component can be rejected if the component was inserted for the first time.
In this case, it is only possible to activate the component when the pulses for all of the drive objects are inhibited.
p0145[0...n] Activate/de-activate encoder interface / Enc_intf act/deact
SERVO_828,
SERVO_COMBI
Can be changed: C1(4), U, T Calculated: - Access level: 2
Data type: Integer16 Dynamic index: EDS, p0140 Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 2 1
Description: Setting to activate/de-activate an encoder interface (Sensor Module).
Value: 0: De-activate component
1: Activate component
2: Component, de-activate and not present
Recommend.: After inserting a component, before activating, first wait for Alarm A01317.
Dependency: Refer to: r0146
Refer to: A01314, A01317
Note: The de-activation of an encoder interface corresponds to the"parking encoder" function and has the same effect.
The activation of a component can be rejected if the component was inserted for the first time.
In this case, it is only possible to activate the component when the pulses for all of the drive objects are inhibited.
With the encoder interface for encoder 1 (motor encoder), the relevant drive object for writing the parameter must be in
the "Ready for operation" state.
With the encoder interface for encoders 2 and 3, the parameter can also be written during operation.
Re value = 0, 2:
When a component is deactivated it no longer outputs any errors.
If value = 0:
The component was completely commissioned and is deactivated using this value. It can be removed from the DRIVECLiQ without any error.
If value = 1:
The component must be available for error-free operation.
If value = 2:
A component in a project generated offline and set to this value must never be inserted in the actual topology from the
very start.
For components that comprise several individual components (e.g. Double Motor Modules), it is not permissible to set
just one subset to this value.
82
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 83

r0146[0...n] Voltage Sensing Module, active/inactive / VSM act/inact
A_INF_828,
S_INF_828
Description: Displays the "active" or "inactive" state of a Voltage Sensing Module (VSM).
Value: 0: Component inactive
Dependency: Refer to: p0105, p0145
Can be changed: - Calculated: - Access level: 2
Data type: Integer16 Dynamic index: p0140 Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 1 -
1: Component active
r0146[0...n] Encoder interface active/inactive / Enc_intf act/inact
SERVO_828,
SERVO_COMBI
Description: Displays the "active" or "inactive" state of an encoder interface (Sensor Module).
Value: 0: Component inactive
Dependency: Refer to: p0105, p0145, p0480, p0897
Can be changed: - Calculated: - Access level: 2
Data type: Integer16 Dynamic index: EDS, p0140 Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 1 -
1: Component active
SINAMICS parameters
r0147[0...n] Voltage Sensing Module, EPROM data version / VSM EEPROM version
A_INF_828,
S_INF_828
Description: Displays the version of the EPROM data of the Voltage Sensing Module (VSM).
Note: Example:
Can be changed: - Calculated: - Access level: 3
Data type: Unsigned32 Dynamic index: p0140 Func. diagram: -
P-Group: Encoder Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
The value 1010100 should be interpreted as V01.01.01.00.
r0147[0...n] Sensor Module EEPROM data version / SM EEPROM version
SERVO_828,
SERVO_COMBI
Description: Displays the version of the EEPROM data of the Sensor Module.
Dependency: Refer to: r0127, r0157
Note: Example:
Can be changed: - Calculated: - Access level: 3
Data type: Unsigned32 Dynamic index: EDS, p0140 Func. diagram: -
P-Group: Encoder Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
The value 1010100 should be interpreted as V01.01.01.00.
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
83
Page 84

SINAMICS parameters
r0148[0...n] Voltage Sensing Module firmware version / VSM FW version
A_INF_828,
S_INF_828
Description: Displays the firmware version of the Voltage Sensing Module (VSM).
Dependency: Refer to: r0018, r0128, r0158, r0197, r0198
Note: Example:
Can be changed: - Calculated: - Access level: 3
Data type: Unsigned32 Dynamic index: p0140 Func. diagram: -
P-Group: Encoder Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
The value 1010100 should be interpreted as V01.01.01.00.
r0148[0...n] Sensor Module firmware version / SM FW version
SERVO_828,
SERVO_COMBI
Description: Displays the firmware version of the Sensor Module.
Dependency: Refer to: r0018, r0128, r0158, r0197, r0198
Note: Example:
Can be changed: - Calculated: - Access level: 3
Data type: Unsigned32 Dynamic index: EDS, p0140 Func. diagram: -
P-Group: Encoder Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
The value 1010100 should be interpreted as V01.01.01.00.
p0150 VSM2 data sets selection / VSM2 dat_sets qty
A_INF_828,
S_INF_828
Description: Sets the number of VSM2 data sets.
Dependency: The Voltage Sensing Module 2 (VSM2) can only be used if the "line transformer" function module has been activated
Note: The Voltage Sensing Module 2 (VSM2) should always be connected to the primary side of the line transformer if at all
Can be changed: C1(3) Calculated: - Access level: 4
Data type: Unsigned8 Dynamic index: - Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
1 2 1
(r0108.4 = 1).
For the VSM2, parameters p5460 and following are significant.
possible.
p0151[0...n] Voltage Sensing Module 2 component number / VSM2 comp_num
A_INF_828,
S_INF_828
Description: The VSM2 data set is assigned to a VSM2 evaluation using this parameter.
Can be changed: C1(4) Calculated: - Access level: 4
Data type: Unsigned8 Dynamic index: p0150 Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 199 0
84
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 85

SINAMICS parameters
p0151[0...1] DRIVE-CLiQ Hub Module component number / Hub comp_no
HUB Can be changed: C1(4) Calculated: - Access level: 3
Data type: Unsigned8 Dynamic index: - Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 199 0
Description: This parameter is used to assign the data set to a DRIVE-CLiQ Hub Module.
This unique component number is assigned when parameterizing the topology.
Only the numbers of components operated as hubs can be entered in these parameters.
[0] = DRIVE-CLiQ node 1
[1] = DRIVE-CLiQ node 2
p0151 Terminal Module component number / TM comp_no
TM120, TM150,
TM54F_MA,
TM54F_SL
Description: Sets the component number for the Terminal Module.
Can be changed: C1(4) Calculated: - Access level: 3
Data type: Unsigned8 Dynamic index: - Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 199 0
This unique component number is assigned when parameterizing the topology.
Only component numbers can be entered into this parameter that correspond to a Terminal Module.
p0154[0...n] Voltage Sensing Module 2 detection via LED / VSM2 detection LED
A_INF_828,
S_INF_828
Description: Detects the Voltage Sensing Module 2 (VSM2) assigned to this infeed.
Can be changed: U, T Calculated: - Access level: 4
Data type: Unsigned8 Dynamic index: p0150 Func. diagram: -
P-Group: Encoder Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 1 0
p0154 DRIVE-CLiQ Hub Module detection via LED / Hub detection LED
HUB Can be changed: U, T Calculated: - Access level: 2
Data type: Unsigned8 Dynamic index: - Func. diagram: -
P-Group: Encoder Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 1 0
Description: Detects any DRIVE-CLiQ Hub Module that has been assigned.
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
85
Page 86

SINAMICS parameters
p0154 Terminal Module detection via LED / TM detection LED
TM120, TM150,
TM54F_MA,
TM54F_SL
Description: Detects the Terminal Module assigned to this drive and data set.
Note: While p0154 = 1, the READY LED flashes green/orange or red/orange with 2 Hz at the appropriate Terminal Module.
Can be changed: U, T Calculated: - Access level: 2
Data type: Unsigned8 Dynamic index: - Func. diagram: -
P-Group: Terminals Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 1 0
p0155[0...n] Voltage Sensing Module 2, activate/de-activate / VSM2 act/deact
A_INF_828,
S_INF_828
Description: Setting to activate/de-activate a Voltage Sensing Module 2 (VSM2).
Value: 0: De-activate component
Recommend.: After inserting a component, before activating, first wait for Alarm A01317.
Dependency: Refer to: r0156
Can be changed: C1(4), T Calculated: - Access level: 4
Data type: Integer16 Dynamic index: p0150 Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 2 1
1: Activate component
2: Component, de-activate and not present
Refer to: A01314, A01317
r0156[0...n] Voltage Sensing Module 2, active/inactive / VSM2 act/inact
A_INF_828,
S_INF_828
Description: Displays the "active" or "inactive" state of a Voltage Sensing Module 2 (VSM2).
Value: 0: Component inactive
Dependency: Refer to: p0155
Can be changed: - Calculated: - Access level: 4
Data type: Integer16 Dynamic index: p0150 Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 1 -
1: Component active
r0157[0...n] Voltage Sensing Module 2, EPROM data version / VSM2 EPROM version
A_INF_828,
S_INF_828
Description: Displays the version of the EPROM data of the Voltage Sensing Module 2 (VSM2).
Note: Example:
Can be changed: - Calculated: - Access level: 4
Data type: Unsigned32 Dynamic index: p0150 Func. diagram: -
P-Group: Encoder Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
The value 1010100 should be interpreted as V01.01.01.00.
86
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 87

SINAMICS parameters
r0157 DRIVE-CLiQ Hub Module EPROM data version / Hub EPROM version
HUB Can be changed: - Calculated: - Access level: 3
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: Terminals Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
Description: Displays the version of the EPROM data for the DRIVE-CLiQ Hub Module.
Note: Example:
The value 1010100 should be interpreted as V01.01.01.00.
r0157 Terminal Module EPROM data version / TM EPROM version
TM120, TM150,
TM54F_MA,
TM54F_SL
Description: Displays the version of the EPROM data of the Terminal Module.
Dependency: Refer to: r0127, r0147
Note: Example:
Can be changed: - Calculated: - Access level: 3
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: Terminals Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
The value 1010100 should be interpreted as V01.01.01.00.
r0158[0...n] Voltage Sensing Module 2 firmware version / VSM2 FW version
A_INF_828,
S_INF_828
Description: Displays the firmware version of the Voltage Sensing Module 2 (VSM2).
Dependency: Refer to: r0018, r0197, r0198
Note: Example:
Can be changed: - Calculated: - Access level: 4
Data type: Unsigned32 Dynamic index: p0150 Func. diagram: -
P-Group: Encoder Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
The value 1010100 should be interpreted as V01.01.01.00.
r0158 DRIVE-CLiQ Hub Module firmware version / Hub FW version
HUB Can be changed: - Calculated: - Access level: 3
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: Terminals Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
Description: Displays the firmware version of the DRIVE-CLiQ Hub Module.
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
87
Page 88

SINAMICS parameters
r0158 Terminal Module firmware version / TM FW version
TM120, TM150,
TM54F_MA,
TM54F_SL
Description: Displays the firmware version of the Terminal Module.
Dependency: Refer to: r0018, r0128, r0148, r0197, r0198
Note: Example:
Can be changed: - Calculated: - Access level: 3
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: Terminals Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
The value 1010100 should be interpreted as V01.01.01.00.
p0161 HF Damping Module component number / HF Damp comp_no
SERVO_828 Can be changed: C1(4) Calculated: - Access level: 4
Data type: Unsigned8 Dynamic index: - Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 199 0
Description: Sets the component number for the HF Damping Module.
This unique component number is assigned when parameterizing the topology.
Only component numbers can be entered into this parameter that correspond to an HF Damping Module.
p0162 CU-LINK slave component number / CU-LINK comp_no
CU_LINK Can be changed: C1(4) Calculated: - Access level: 3
Data type: Unsigned8 Dynamic index: - Func. diagram: -
P-Group: Terminals Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 199 0
Description: Sets the component number for the expansion component (e.g. CX32, NX10) for CU-LINK.
This unique component number is assigned when parameterizing the topology.
p0162 HF Choke Module component number / HF Choke comp_no
SERVO_828,
SERVO_COMBI
Description: Sets the component number for the HF Choke Module.
Can be changed: C1(4) Calculated: - Access level: 3
Data type: Unsigned8 Dynamic index: - Func. diagram: -
P-Group: Terminals Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 199 0
This unique component number is assigned when parameterizing the topology.
Only component numbers can be entered into this parameter that correspond to an HF Choke Module.
88
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 89

SINAMICS parameters
p0165 Activate/de-activate filter module / FM act/deact
SERVO_828 Can be changed: C1(4), T Calculated: - Access level: 2
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 2 1
Description: Setting for activating/de-activating the filter module.
Value: 0: De-activate component
1: Activate component
2: Component, de-activate and not present
Recommend.: After inserting a component, before activating, first wait for Alarm A01317.
Dependency: Refer to: r0166
Refer to: A01314, A01317
Note: The activation of a component can be rejected if the component was inserted for the first time.
In this case, it is only possible to activate the component when the pulses for all of the drive objects are inhibited.
Re value = 0, 2:
When a component is deactivated it no longer outputs any errors.
If value = 0:
The component was completely commissioned and is deactivated using this value. It can be removed from the DRIVECLiQ without any error.
If value = 1:
The component must be available for error-free operation.
If value = 2:
A component in a project generated offline and set to this value must never be inserted in the actual topology from the
very start.
r0166 Filter module active/inactive / FM act/inact
SERVO_828 Can be changed: - Calculated: - Access level: 2
Data type: Integer16 Dynamic index: - Func. diagram: -
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 1 -
Description: Displays the "active/inactive" state of a filter module.
Value: 0: Component inactive
Dependency: Refer to: p0165
1: Component active
p0170 Number of Command Data Sets (CDS) / CDS count
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828
Description: Sets the number of Command Data Sets (CDS).
Note: It is possible to toggle between command parameters (BICO parameters) using this data set changeover.
Can be changed: C1(3) Calculated: - Access level: 2
Data type: Unsigned8 Dynamic index: - Func. diagram: -
P-Group: Commands Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
1 2 1
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
89
Page 90

SINAMICS parameters
p0180 Number of Drive Data Sets (DDS) / DDS count
SERVO_828,
SERVO_COMBI
Description: Sets the number of Drive Data Sets (DDS).
Can be changed: C1(3) Calculated: - Access level: 2
Data type: Unsigned8 Dynamic index: - Func. diagram: 8565
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
1 32 1
p0186[0...n] Motor Data Sets (MDS) number / MDS number
SERVO_828,
SERVO_COMBI
Description: Using the parameter, each Drive Data Set (= index) is assigned the associated Motor Data Set (MDS).
Can be changed: C1(4) Calculated: - Access level: 3
Data type: Unsigned8 Dynamic index: DDS, p0180 Func. diagram: 8575
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 15 0
The parameter value therefore corresponds to the number of the assigned motor data set.
p0187[0...n] Encoder 1 encoder data set number / Enc 1 EDS number
SERVO_828,
SERVO_COMBI
Can be changed: C1(4) Calculated: - Access level: 3
Data type: Unsigned8 Dynamic index: DDS, p0180 Func. diagram: 1580, 8570
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 99 99
Description: Assign a drive data set (= index) the corresponding encoder data set (EDS) for encoder 1.
The value corresponds to the number of the assigned encoder data set.
Example:
Encoder 1 in drive data set 2 should be assigned to encoder data set 0.
--> p0187[2] = 0
Notice: Writing to p0187 is rejected if the pole position identification is selected (p1982 = 1) and additional data sets with the
same MDS data set (p0186) are available, which however have a different encoder data set number in p0187.
If all data sets with this MDS p0187 are to be changed, then the pole position identification of the data sets involved
should be temporarily deselected (p1982 = 0), p0187 changed for all MDS data sets and then the pole position identification reselected (p1982 = 1).
If a motor with pole position identification is to be operated with two different encoders, then for this motor, two motor
data sets should be introduced.
Note: A value of 99 means that no encoder has been assigned to this drive data set (not configured).
90
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 91

SINAMICS parameters
p0188[0...n] Encoder 2 encoder data set number / Enc 2 EDS number
SERVO_828,
SERVO_COMBI
Description: Assign a drive data set (= index) the corresponding encoder data set (EDS) for encoder 2.
Note: A value of 99 means that no encoder has been assigned to this drive data set (not configured).
Can be changed: C1(4) Calculated: - Access level: 3
Data type: Unsigned8 Dynamic index: DDS, p0180 Func. diagram: 1580, 8570
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 99 99
The value corresponds to the number of the assigned encoder data set.
Example:
Encoder 2 in drive data set 2 should be assigned to encoder data set 1.
--> p0188[2] = 1
p0189[0...n] Encoder 3 encoder data set number / Enc 3 EDS number
SERVO_828,
SERVO_COMBI
Can be changed: C1(4) Calculated: - Access level: 3
Data type: Unsigned8 Dynamic index: DDS, p0180 Func. diagram: 1580, 8570
P-Group: Data sets Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 99 99
Description: Assign a drive data set (= index) the corresponding encoder data set (EDS) for encoder 3.
The value corresponds to the number of the assigned encoder data set.
Note: A value of 99 means that no encoder has been assigned to this drive data set (not configured).
r0192 Power unit firmware properties / PU FW property
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828
Description: Displays the properties supported by the power unit firmware.
Bit field: Bit Signal name 1 signal 0 signal FP
Can be changed: - Calculated: - Access level: 3
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: Converter Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
00 Edge modulation possible Yes No 01 Free telegram can be selected Yes No 02 Smart mode possible for Active Line Module Yes No 03 Safety Integrated possible for VECTOR Yes No 06 Liquid cooling Yes No 07 SERVO pulse frequency changeover, DDS-
dependent
08 Simulation mode possible Yes No 09 Internal armature short-circuit possible Yes No 10 Autonomous internal armature short-circuit
possible
11 Infeed temperature inputs X21.1/2 Yes No 12 Integral scaled to half the gating unit clock
cycle freq.
13 Filtering thermal power unit current limit
possible
14 DC link compensation possible in power unit Yes No 15 PT100 temperature evaluation possible Yes No -
Yes No -
Yes No -
Yes No -
Yes No -
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
91
Page 92

SINAMICS parameters
16 Gating unit with pulse frequency wobbula-
tion possible
17 Compound braking possible Yes No 18 Extended voltage range possible Yes No 19 Gating unit available with current limitation
control
20 Component status possible Yes No 21 Temperature evaluation via Motor Module /
CU terminals possible
22 Reduced device supply voltage possible Yes No 23 Current measurement oversampling avail-
able
24 Parking keeping the relevant data is avail-
able
25 Internal fan operating hours counter avail-
able
26 Software gating unit in the CU is supported Yes No 27 Current controller dynamics higher Yes No -
Notice: This information represents the characteristics/features of the power unit firmware. It does not provide information/data
about the characteristics/features of the hardware (e.g. bit 06 = 1 means that although the firmware supports "liquid
cooling", a power unit with liquid cooling does not have to be used).
Note: Re bit 09:
The Motor Module supports the internal armature short-circuit. The function is internally required for voltage protection
(p1231 = 3).
Re bit 10:
The Motor Module supports the autonomous internal voltage protection.
If the "internal voltage protection" function is activated (p1231 = 3) the Motor Module decides autonomously - using the
DC link voltage - as to whether the short-circuit is activated.
Re bit 23:
The component supports the detection of current actual values (and the detection of valve close durations) with double
clocking and phase shift.
Yes No -
Yes No -
Yes No -
Yes No -
Yes No -
Yes No -
r0194[0...n] VSM properties / VSM properties
A_INF_828,
S_INF_828
Description: Displays the properties supported by the Voltage Sensing Module (VSM).
Bit field: Bit Signal name 1 signal 0 signal FP
Can be changed: - Calculated: - Access level: 4
Data type: Unsigned32 Dynamic index: p0140 Func. diagram: -
P-Group: Encoder Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
00 Reserved Yes No -
r0196[0...255] DRIVE-CLiQ component status / DLQ comp status
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: Displays the status of DRIVE-CLiQ components.
Can be changed: - Calculated: - Access level: 3
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
r0196[0...1]: Not used
r0196[2]: Status of DRIVE-CLiQ component with component number 2
...
r0196[255]: Status of DRIVE-CLiQ component with component number 255
92
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 93

Note: Structure of status value: Bits 31 ... 08, 07, 06 ... 04, 03 ... 00
Re Bit 31 ... 08: Reserved
Re Bit 07: 1: Part of target topology, 0: Only in actual topology
Re Bit 06 ... 04: 1: Active, 0: Inactive or parked
Re bit 03 ... 00:
0: Component data not available.
1: Power-up, acyclic DRIVE-CLiQ communication (LED = orange).
2: Ready for operation, cyclic DRIVE-CLiQ communication (LED = green).
3: Alarm (LED = green).
4: Fault (LED = red).
5: Detection via LED and ready for operation (LED = green/orange).
6: Detection via LED and alarm (LED = green/orange).
7: Detection via LED and fault (LED = red/orange).
8: Downloading firmware (LED = green/red at 0.5 Hz).
9: Firmware downloading completed, Waiting for POWER ON (LED = green/red at 2.0 Hz).
r0197 Bootloader vers / Bootloader vers
CU_I_828,
CU_I_COMBI,
CU_NX_828
Can be changed: - Calculated: - Access level: 4
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
SINAMICS parameters
Min Max Factory setting
- - -
Description: Displays the bootloader version.
Dependency: Refer to: r0018, r0128, r0148, r0158, r0198
Note: Example:
The value 1010100 should be interpreted as V01.01.01.00.
r0198[0...1] BIOS/EEPROM data version / BIOS/EEPROM vers
CU_I_828,
CU_I_COMBI,
CU_NX_828
Description: Displays the BIOS and EEPROM data version.
Dependency: Refer to: r0018, r0128, r0148, r0158, r0197
Note: Example:
Can be changed: - Calculated: - Access level: 4
Data type: Unsigned32 Dynamic index: - Func. diagram: -
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
r0198[0]: BIOS version
r0198[1]: EEPROM data version
The value 1010100 should be interpreted as V01.01.01.00.
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
93
Page 94

SINAMICS parameters
p0199[0...24] Drive object name / DO name
All objects Can be changed: C1 Calculated: - Access level: 2
Data type: Unsigned16 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 65535 0
Description: Freely assignable name for a drive object.
In the commissioning software, this name cannot be entered using the expert list, but is specified in the configuration
assistant. The object name can be subsequently modified in the Project Navigator using standard Windows resources.
Note: The parameter is not influenced by setting the factory setting.
r0200[0...n] Power unit code number actual / PU code no. act
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828
Description: Displays the unique code number of the power unit.
Note: r0200 = p0201: No power unit found
Can be changed: - Calculated: - Access level: 3
Data type: Unsigned16 Dynamic index: PDS, p0120 Func. diagram: -
P-Group: Converter Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
For parallel circuit configurations, the parameter index is assigned to a power unit.
p0201[0...n] Power unit code number / PU code no
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI
Description: Sets the actual code number from r0200 to acknowledge the power unit being used.
Dependency: Refer to: F07815
Note: The parameter is used to identify when the drive is being commissioned for the first time.
Can be changed: C2(2) Calculated: - Access level: 3
Data type: Unsigned16 Dynamic index: PDS, p0120 Func. diagram: -
P-Group: Converter Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 65535 0
When commissioned for the first time, the code number is automatically transferred from r0200 into p0201.
The power unit commissioning can only be exited (p0201 = r0200), if the actual and acknowledged code numbers are
identical (p0010 = 2).
For parallel circuit configurations, the parameter index is assigned to a power unit.
p0201[0...n] Power unit code number / PU code no
SERVO_828 Can be changed: C2(2) Calculated: - Access level: 3
Data type: Unsigned16 Dynamic index: PDS, p0120 Func. diagram: -
P-Group: Converter Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
0 65535 0
Description: Sets the actual code number from r0200 to acknowledge the power unit being used.
When commissioned for the first time, the code number is automatically transferred from r0200 into p0201.
Dependency: Refer to: F07815
94
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 95

SINAMICS parameters
Notice: When p0201 = 10000, the rated power unit data is reloaded and dependent parameters are set (e.g. p0205, p0210,
Note: The parameter is used to identify when the drive is being commissioned for the first time.
p0230, p0857, p1800). p0201 is then automatically assigned the value of r0200 if the code number of the power unit
could be read. A warm start must be performed after this procedure (automatically if necessary).
The power unit commissioning can only be exited (p0201 = r0200), if the actual and acknowledged code numbers are
identical (p0010 = 2). However, if the comparator in p9906 or p9908 is at 2 (low) or 3 (minimum), the power unit commissioning is automatically set to p0201 = r0200 upon exiting.
When the code number is changed, the connection voltage (p0210) is checked and, if necessary, adjusted.
For parallel circuit configurations, the parameter index is assigned to a power unit.
r0203[0...n] Actual power unit type / PU actual type
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828
Description: Displays the type of power unit found.
Value: 2: MICROMASTER 440
Note: For parallel circuit configurations, the parameter index is assigned to a power unit.
Can be changed: - Calculated: - Access level: 3
Data type: Integer16 Dynamic index: PDS, p0120 Func. diagram: -
P-Group: Converter Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
2 400 -
3: MICROMASTER 411
4: MICROMASTER 410
5: MICROMASTER 436
6: MICROMASTER 440 PX
7: MICROMASTER 430
100: SINAMICS S
101: SINAMICS S (value)
102: SINAMICS S (combi)
103: SINAMICS S120M (distributed)
112: PM220 (SINAMICS G120)
113: PM230 (SINAMICS G120)
114: PM240 (SINAMICS G120)
115: PM250 (SINAMICS G120 / S120)
116: PM260 (SINAMICS G120)
118: SINAMICS G120 Px
120: PM340 (SINAMICS S120)
130: PM250D (SINAMICS G120D)
133: SINAMICS G120C
150: SINAMICS G
151: PM330 (SINAMICS G120)
200: SINAMICS GM
250: SINAMICS SM
260: SINAMICS MC
300: SINAMICS GL
350: SINAMICS SL
400: SINAMICS DCM
r0203[0...15] Firmware package name / FW pkg name
CU_I_828,
CU_I_COMBI,
CU_NX_828
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Can be changed: - Calculated: - Access level: 4
Data type: Unsigned8 Dynamic index: - Func. diagram: -
P-Group: - Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
95
Page 96

SINAMICS parameters
Description: Displays the name of the firmware package on the memory card/device memory.
r0203[0]: Name character 1
...
r0203[15]: Name character 16
For the commissioning software, the ASCII characters are displayed uncoded.
Notice: An ASCII table (excerpt) can be found, for example, in the appendix to the List Manual.
r0204[0...n] Power unit hardware properties / PU HW property
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI
Description: Displays the properties supported by the power unit hardware.
Bit field: Bit Signal name 1 signal 0 signal FP
Note: For parallel circuit configurations, the parameter index is assigned to a power unit.
Can be changed: - Calculated: - Access level: 3
Data type: Unsigned32 Dynamic index: PDS, p0120 Func. diagram: -
P-Group: Converter Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
00 Device type DC/AC device AC/DC device 01 RFI filter available Yes No 02 Active Line Module available Yes No 03 Smart Line Module available Yes No 04 Basic Line Module available with thyristor
bridge
05 Basic Line Module available with diode
bridge
06 Liquid cooling with cooling unit (chassis PU) Yes No 07 F3E regenerative feedback into the line sup-
ply
08 Internal Braking Module Yes No 09 Different cooling type supported Yes No 12 Safe Brake Control (SBC) supported No Yes 13 Safety Integrated supported Yes No 14 Internal LC output filter Yes No -
Yes No -
Yes No -
Yes No -
r0204[0...n] Power unit hardware properties / PU HW property
SERVO_828 Can be changed: - Calculated: - Access level: 3
Data type: Unsigned32 Dynamic index: PDS, p0120 Func. diagram: -
P-Group: Converter Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - -
Description: Displays the properties supported by the power unit hardware.
Bit field: Bit Signal name 1 signal 0 signal FP
00 Device type DC/AC device AC/AC device 01 RFI filter available Yes No 02 Active Line Module available Yes No 03 Smart Line Module available Yes No -
96
04 Basic Line Module available with thyristor
bridge
05 Basic Line Module available with diode
bridge
06 Liquid cooling with cooling unit (chassis PU) Yes No 07 F3E regenerative feedback into the line sup-
ply
08 Internal Braking Module Yes No 09 Different cooling type supported Yes No -
Yes No -
Yes No -
Yes No -
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 97

12 Safe Brake Control (SBC) supported No Yes 13 Safety Integrated supported Yes No 14 Internal LC output filter Yes No -
Note: For parallel circuit configurations, the parameter index is assigned to a power unit.
r0206[0...4] Rated power unit power / PU P_rated
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI
Description: Displays the rated power unit power for various load duty cycles.
Index: [0] = Rated value
Dependency: IECdrives (p0100 = 0): Units kW
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: -
P-Group: Converter Units group: 14_6 Unit selection: p0100
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- [kW] - [kW] - [kW]
[1] = Load duty cycle with low overload
[2] = Load duty cycle with high overload
[3] = S1 cont duty cyc
[4] = S6 load duty cycle
NEMA drives (p0100 = 1): Units hp
Refer to: p0100
SINAMICS parameters
r0207[0...4] Rated power unit current / PU PI_rated
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI
Description: Displays the rated power unit power for various load duty cycles.
Index: [0] = Rated value
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8014
P-Group: Converter Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- [Arms] - [Arms] - [Arms]
[1] = Load duty cycle with low overload
[2] = Load duty cycle with high overload
[3] = S1 cont duty cyc
[4] = S6 load duty cycle
r0208 Rated power unit line supply voltage / PU U_rated
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI
Description: Displays the rated line supply voltage of the power unit.
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: -
P-Group: Converter Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- [Vrms] - [Vrms] - [Vrms]
r0208 = 400 : 380 - 480 V +/-10 %
r0208 = 500 : 500 - 600 V +/-10 %
r0208 = 690 : 660 - 690 V +/-10 %
For the Basic Line Module (BLM) the following applies:
r0208 = 690 : 500 - 690 V +/-10 %
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
97
Page 98

SINAMICS parameters
r0209[0...4] Power unit, maximum current / PU I_max
A_INF_828,
B_INF_828,
S_INF_828,
S_INF_COMBI,
SERVO_828,
SERVO_COMBI
Description: Displays the maximum output current of the power unit.
Index: [0] = Catalog
Can be changed: - Calculated: - Access level: 2
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8750, 8850,
8950
P-Group: Converter Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- [Arms] - [Arms] - [Arms]
[1] = Load duty cycle with low overload
[2] = Load duty cycle with high overload
[3] = S1 load duty cycle
[4] = S6 load duty cycle
p0210 Drive unit line supply voltage / V_connect
A_INF_828,
S_INF_828,
S_INF_COMBI
Description: Sets the drive unit supply voltage (3-ph. AC).
Dependency: Refer to: p3400
Warning: If the infeed is continually in the controlled mode with high DC link voltages (p3510 > 660 V), depending on the partic-
Notice: For p0210 > 415 V for booksize power units with a supply voltage of 3-ph. 380 ... 480 V, the Smart Mode is automati-
Note: When pre-assigning the setpoint for the DC link voltage (p3510), the following is generally valid:
Can be changed: C2(1) Calculated: - Access level: 1
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8860, 8960
P-Group: Converter Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
100 [Vrms] 1000 [Vrms] 400 [Vrms]
The value corresponds to the rms value of the phase-to-phase rated line supply voltage.
ular application, this can damage the connected motors that have not been specified for these high voltages.
Before an active infeed with a line supply voltage p0210 > 415 V goes into pulsed operation it must be ensured that all
of the components connected to the DC link can be permanently operated with DC link voltages exceeding 660 V.
Controlled operation of booksize power units for p0210 > 415 V is possible if the maximum steady-state DC link voltage (p0280) is increased as follows: p0280 >= 1.5 x p0210 and p0280 > 660 V.
In this case, the setpoint of the DC link voltage p3510 is not automatically adapted. We recommend p3510 = 1.5 x
p0210. Closed-loop voltage controlled operation is active with p3400.0 = 0 and p3400.3 = 1.
cally activated (p3400.0 = 1); this is because in the voltage-controlled mode, the maximum permissible steady-state
DC link voltage (p0280) would otherwise be exceeded.
For booksize power units with supply voltage of 3-ph. 380 ... 480 V AC, the following applies:
380 V <= p0210 <= 400 V --> Pre-assignment, setpoint for the DC link voltage: p3510 = 600 V
401 V <= p0210 <= 415 V --> Pre-assignment, setpoint for the DC link voltage: p3510 = 625 V
416 V <= p0210 <= 480 V --> Smart Mode with non-regulated DC link voltage: p3510 = 1.35 x p0210
p3510 = 1.5 x p0210
The voltage range for the supply voltage depends on the type and the voltage class of the power unit.
For booksize drive units, the following applies:
Active Line Module, 400 V unit: 180 V <= p0210 <= 480 V
Smart Line Module, 400 V unit: 180 V <= p0210 <= 480 V
For chassis units, the following applies:
Active Line Module, 400 V unit: 180 V <= p0210 <= 480 V
Active Line Module, 690 V unit: 660 V <= p0210 <= 690 V
Active Line Module, 500/690 V unit: 380 V <= p0210 <= 690 V
Smart Line Module, 400 V unit: 380 V <= p0210 <= 480 V
Smart Line Module, 690 V unit: 500 V <= p0210 <= 690 V
98
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
Page 99

SINAMICS parameters
p0210 Drive unit line supply voltage / V_connect
B_INF_828 Can be changed: C2(1) Calculated: - Access level: 1
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8760
P-Group: Converter Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
70 [Vrms] 1000 [Vrms] 400 [Vrms]
Description: Sets the drive unit supply voltage (3-ph. AC).
The value corresponds to the rms value of the phase-to-phase rated line supply voltage.
Dependency: The parameter can be reduced to p0210 = 70 V if p0212.0 is set.
Caution: If the line supply voltage is higher than the entered value, the Vdc controller may be automatically de-activated in some
cases to prevent the motor from accelerating. In this case, an appropriate alarm is output.
Notice: When connected to 3-ph. 230 V AC (only booksize units) the following must be observed:
- the undervoltage and overvoltage limits change (r0296, r0297).
- when using the internal braking chopper of Basic Line Modules (20 or 40 kW) the threshold when the braking chopper
becomes active is reduced to 385 V. When using an external braking chopper, it must be ensured that a suitable activation threshold is used.
- all of the components connected to this DC link must also be adapted to the low line supply voltage. It is especially
important that the rated DC voltage of all of the drives connected to this DC link is set with p0210 (e.g. p0210(SERVO)
= 1.35 x p0210(B_INF) = 310 V).
- it is not possible to use a Control Supply Module (CSM) to generate a 24 V supply from the DC link, as the minimum
continuous DC link voltage should not be below 430 V.
Note: The supply voltage range depends on the voltage class of the power unit.
400 V chassis units: 380 V <= p0210 <= 480 V
690 V chassis units: 500 V <= p0210 <= 690 V
400 V booksize units can also be connected to 3-ph. 230 V AC:
400 V booksize units: 180 V <= p0210 <= 480 V
A reduced supply voltage up to 70 V is possible if p0212.0 = 1 has been set.
p0210 Drive unit line supply voltage / V_connect
SERVO_828,
SERVO_COMBI
Description: Sets the drive unit supply voltage.
Dependency: Set p1254, p1294 (automatic detection of the Vdc switch-on levels) = 0.
Caution: If the line supply voltage is higher than the entered value, the Vdc controller may be automatically de-activated in some
Note: Setting ranges for p0210 as a function of the rated power unit voltage:
Can be changed: C2(2), T Calculated: - Access level: 3
Data type: Unsigned16 Dynamic index: - Func. diagram: -
P-Group: Converter Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
1 [V] 63000 [V] 600 [V]
AC/AC unit: The rms value of the phase-to-phase line supply voltage should be entered.
DC/AC unit: The rated DC voltage of the connection busbar should be entered.
The switch-in thresholds of the Vdc_max controller are then directly determined using p0210.
cases to prevent the motor from accelerating. In this case, an appropriate alarm is output.
U_rated = 400 V:
- p0210 = 380 ... 480 V (AC/AC), 510 ... 720 V (DC/AC)
U_rated = 500 V:
- p0210 = 500 ... 600 V (AC/AC), 675 ... 900 V (DC/AC)
U_rated = 660 ... 690 V:
- p0210 = 660 ... 690 V (AC/AC), 890 ... 1035 V (DC/AC)
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
99
Page 100

SINAMICS parameters
U_rated = 500 ... 690 V:
- p0210 = 500 ... 690 V (AC/AC), 675 ... 1035 V (DC/AC)
The pre-charging switch-in threshold for the DC link voltage (Vdc) is calculated from p0210:
Vdc_pre = p0210 * 0.82 * 1.35 (AC/AC)
Vdc_pre = p0210 * 0.82 (DC/AC)
The undervoltage thresholds for the DC link voltage (Vdc) are calculated from p0210 as a function of the rated power
unit voltage:
U_rated = 400 V:
- U_min = p0210 * 0.78 (AC/AC) > 330 V, p0210 * 0.60 (DC/AC) > 380 V
U_rated = 500 V:
- U_min = p0210 * 0.76 (AC/AC) > 410 V
U_rated = 660 ... 690 V:
- U_min = p0210 * 0.82 (AC/AC) > 565 V, p0210 * 0.63 (DC/AC) > 650 V
U_rated = 500 ... 690 V:
- U_min = p0210 * 0.82 (AC/AC) > 420 V, p0210 * 0.63 (DC/AC) > 480 V
p0211 Rated line freq / Rated line freq
A_INF_828,
S_INF_828,
S_INF_COMBI
Description: Sets the rated line frequency for the infeed.
Dependency: Refer to: p3409
Notice: For p3409 = 1, the following applies:
Can be changed: T Calculated: - Access level: 3
Data type: FloatingPoint32 Dynamic index: - Func. diagram: 8864, 8964
P-Group: Closed-loop control Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
10 [Hz] 100 [Hz] 55 [Hz]
After operation has been enabled, the rated line supply frequency (p0211) is automatically set to a value of 50 Hz or 60
Hz corresponding to the currently measured frequency. This means that the parameter value of p0211 is, under certain
circumstances, changed.
For p3409 = 0, the following applies:
The system does not change parameter p0211.
p0212 Power unit configuration / PU config
B_INF_828 Can be changed: C2(2) Calculated: - Access level: 3
Data type: Unsigned16 Dynamic index: - Func. diagram: -
P-Group: Converter Units group: - Unit selection: -
Not for motor type: - Scaling: - Expert list: 1
Min Max Factory setting
- - 0000 bin
Description: Sets the power unit configuration.
Bit field: Bit Signal name 1 signal 0 signal FP
Dependency: Re bit 00:
Caution: Re bit 00:
100
00 Drive unit line supply voltage reduced Yes No 02 Supply voltage tolerance range extended Yes No -
Reduced supply voltages are only possible on booksize power units.
Bit 0 = 1 can only be set if r0192.22 = 1.
Refer to: r0192, p0210
Working with reduced input voltages de-activates undervoltage detection.
Re bit 03:
If the automatic setting of the Vdc max limit is deactivated, then all of the components connected to the DC link must
be suitable for the maximum DC link voltage of the power unit (e.g. 820 V for 400 V units).
Parameter description
Parameter Manual, 02/2012, 6FC5397-8DP40-3BA0
 Loading...
Loading...