


Technische Unterlagen
PILOT A2, C/CE2,
und HYPERBARIC
Die in diesem technischen Handbuch enthaltenen Angaben betreffen lediglich die Pilot A2, C “ CE2 ” und Hyperbaric mit Spritzenkörperpositionserkennung.
qWICHTIG : Sämtliche grundlegenden Änderungen an diesem Gerät (technische sowie leistungsbezogene Merkmale etc.) durch Personal, das nicht zu Fa. Fresenius Vial SA gehört, entbindet den Hersteller von jeglicher Verantwortung.
Laufende Reparaturen sowie Wartungsarbeiten können von einem Fachbetrieb Ihrer Wahl unter dessen Verantwortung durchgeführt werden. Es wird jedoch empfohlen, zuvor eine technische Unterweisung durch das Personal von Fa. Fresenius Vial oder MC Medizintechnik einzuholen.
Möglicherweise sind in diesem Handbuch Ungenauigkeiten bzw. Schreibfehler enthalten. In spätere Ausgaben dieses Handbuchs können daher Änderungen eingebracht werden.
Jegliche Vervielfältigung, auch die Vervielfältigung von Ausschnitten dieses Werkes ist untersagt. Das Kopieren oder die Vervielfältigung, unabhängig von der Art und Weise der Vervielfältigung (Photographie, Mikrofilm, CD, Disketten etc.) ist strafbar und wird gesetzlich verfolgt.
1. VORSTELLUNG ........................................................................................................ |
7 |
1.1. Funktionsübersicht....................................................................................................................................... |
7 |
1.2. Vorsichtsmaßnahmen.................................................................................................................................. |
8 |
1.3. Beschreibung der Hauptmerkmale.............................................................................................................. |
8 |
1.3.1. Biologie ............................................................................................................................................. |
8 |
1.3.2. Funktionsprinzip........................................................................................................................................ |
8 |
1.3.3. Abmessungen / Gewichte......................................................................................................................... |
8 |
1.3.4. Elektrische Daten ..................................................................................................................................... |
8 |
1.3.5. Elektronische Komponenten ................................................................................................................... |
8 |
1.3.6. Bedienungsanleitung Pilot A2, C.............................................................................................................. |
8 |
2. PLATINEN................................................................................................................... |
9 |
2.1. Versorgungsplatine mit Motorsteuerung ..................................................................................................... |
9 |
2.1.1. Funktionsprinzip........................................................................................................................................ |
9 |
2.1.2. Beschreibung der Anschlüsse................................................................................................................ |
16 |
2.2. CPU Platine................................................................................................................................................ |
19 |
2.2.1. Vorstellung ............................................................................................................................................. |
19 |
2.2.2. Funktionsbeschreibung ......................................................................................................................... |
19 |
2.2.3. Beschreibung der Verbindungselemente............................................................................................... |
22 |
2.3. Anzeigeplatine ........................................................................................................................................... |
25 |
2.3.1. Vorstellung .............................................................................................................................................. |
25 |
2.3.2. Funktionsbeschreibung .......................................................................................................................... |
25 |
2.3.3. Beschreibung der Verbindungen............................................................................................................ |
27 |
2.3.4. Verbrauch ............................................................................................................................................... |
28 |
3. KONFIGURATION, KALIBRATION UND KONTROLLEN ..................................... |
29 |
3.1. KONFIGURATION ..................................................................................................................................... |
29 |
3.1.1. Konfigurationsmöglichkeiten des Druckparameters .............................................................................. |
29 |
3.1.2. Konfiguration der verschiedenen angebotenen Parameter................................................................... |
31 |
3.1.3. Ansichtstafel Spritzentyp / Anzeigenamen............................................................................................. |
36 |
3.2. Kalibriermodus ........................................................................................................................................... |
37 |
3.2.1. EtA 4 ............................................................................................................................................... |
37 |
3.2.2. EtA 6 ............................................................................................................................................... |
37 |
3.2.3. EtA 9 (Pilot C) ......................................................................................................................................... |
37 |
3.3. Testmodus ................................................................................................................................................. |
38 |
4. WARTUNG................................................................................................................ |
45 |
4.1. Empfehlungen............................................................................................................................................ |
45 |
4.2. Reinigung und Desinfektion ...................................................................................................................... |
45 |
4.3. Lagerung .................................................................................................................................................... |
45 |
4.4. Kontrolle der Led und der Tastatur............................................................................................................ |
46 |
4.5. Test Batteriedauer ..................................................................................................................................... |
46 |
4.6. Isolationstest .............................................................................................................................................. |
46 |
4.7. Fehlerbehebung........................................................................................................................................ |
46 |
4.8. Fehlermeldung ........................................................................................................................................... |
47 |
Technischer Zusatz zur Pilot HYPERBARIC. ....................................................... |
48 |

NOTIZEN:
1. Vorstellung
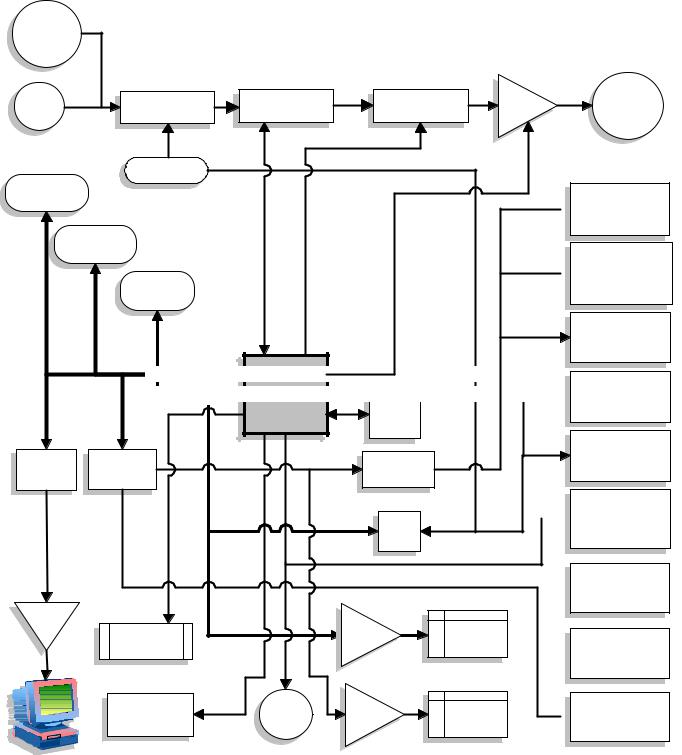
1.1. Funktionsübersicht
Ext 12/15V 15W
|
|
|
DC-DC |
Motor |
Step |
|
230V |
Power supply |
ON / OFF |
by step |
|||
Converter |
driver |
|||||
|
|
|
motor |
|||
|
|
|
|
|||
|
|
|
|
|
|
Battery |
|
|
|
EPROM |
|
|
|
|
128K x 8 |
|
|
|
|
|
RAM |
|
|
|
|
8K x 8 |
|
|
|
|
EEPROM |
|
|
|
|
512 |
|
|
|
|
BUS |
|
|
|
|
SPI |
CPU |
Watch |
|
|
|
|
|
|
|
|
|
dog |
|
UART |
Bus |
|
opto |
|
interface |
|
Interface |
|
|
|
|
|
||
|
|
|
ADC |
|
RS232 |
|
|
|
|
|
Keyboard |
|
LCD |
LCD |
|
|
driver |
||
|
|
Display |
||
|
|
|
|
|
|
Master |
Buzzer |
LED |
LED |
|
driver |
|||
|
|
|
Display |
|
|
|
|
|
Motor  rotation
rotation
sensor
Syringe  barrel
barrel
sensor
Antisiphon sensor
Occlusion  strength
strength
sensor (C)
Displacement sensor
Nurse  call
call
(option)
Occlusion
 Switch
Switch
(A,A2,B)
Disengagement
 Switch
Switch
Flange
 Switch
Switch
PILOT A2, C/CE2 BLOCK DIAGRAMM
1.2. Vorsichtsmaßnahmen
Siehe die Bedienungsanleitung.
1.3. Beschreibung der Hauptmerkmale
1.3.1. Biologie
Das zu fördernde Medium ist nur mit dem Spritzenkörper und dem Patienten in Kontakt.
1.3.2. Funktionsprinzip
Das Funktionsprinzip basiert auf dem “ Spindel / Mutter “ System . Eine Mechanik ermöglicht es, den Kolben mit bekanntem Durchmesser linear zu bewegen.
1.3.3. Abmessungen / Gewichte |
|
|
q H x L x B : |
120 x 330 x 155 mm. |
|
q Gewicht : |
ca. 2,2 kg . |
|
1.3.4. Elektrische Daten |
|
|
q Netzanschluss |
230 V - 50-60 Hz. |
|
q Maximaler Verbrauch |
23 VA. |
|
q Sicherung F2 |
100 mAT 250V IEC 127 |
|
q Batterie 6V - 1.2 Ah/1,3 Ah |
|
|
q Externer Netzanschluss |
12 - 15V DC -15W. |
|
1.3.5. Elektronische Komponenten |
|
|
Die Pilot Spritzenpumpe besteht aus 3 Boards, die je nach Produkt und Optionen verschieden bestückt sind .
q Versorgungsplatine mit Motorsteuerung.
qCPU Platine.
qAnzeige und Tastatur Platine.
1.3.6. Bedienungsanleitung Pilot A2, C
Eine Bedienungsanleitung der Pilot A2, C kann auf Anfrage von unserer Serviceabteilung bezogen werden.
2. Platinen
2.1. Versorgungsplatine mit Motorsteuerung
2.1.1. Funktionsprinzip
Die Versorgungsplatine mit Motorsteuerung beinhaltet aus verdrahtungstechnischen Gründen 6 Module, die auch einzel beschrieben werden:
qVersorgungsmodul
qMotorsteuerungsmodul
qAnaloges Eingangsmodul
qModul für Optogabel, Motorrotation und Spritzenkolbenerkennung
qEingangsmodul Mikroswitch, Entkopplung und Okklusion
qZusatzmodul Schwesternruf und Interface RS 232
2.1.1.1. Versorgungsmodul
Das Versorgungsmodul ist ein Schaltnetzteil, das die ganze Elektronik versorgt und ebenfalls die Pufferbatterie von 1,1 1, oder 1,3 Ah lädt, wobei die Eingangsspannung sowohl Netzspannung als auch Gleichspannung von 12/15 V DC sein kann Dieses Modul erzeugt die nötigen +5V und Vbat für die Elektronik. Es beinhaltet einen Steuermodus ON/OFF diese Versorgungsspannung.
2.1.1.1.1. Netzversorgungsspannung
Das Netzversorgungsmodul erzeugt eine Gleichspannung zwischen 10 und 16 Volt mit maximaler Stromstärke von 1,2 A.
Eingang Netzspannung auf J1:
Transformator: |
TR1 (Siehe Kapitel 2.9: Elektrische Schaltpläne) |
|
15 VA Ausgangsspannung: 9 V ac |
||
|
||
Sicherung: |
F2 (Siehe Kapitel 1.1: Allgemeines) |
|
Primärfilter : |
4.7 NF 4000 V HR Kondensatorentyp DS1510 VDE |
|
Sekundärfilter : |
C10 Elektrolytkondensator |
|
Ausgangsspannung gemessen an TP4 für |
230 V gemessen 10% |
|
Netzspannung |
||
|
2.1.1.1.2. Spannungsversorgung durch externe Gleichspannung 12-15V DC 15 W
Der Zugang für eine Gleichspannungsversorgung ist dazu gedacht, die Spritzenpumpe auch mit einer externe Gleichspannung versorgen zu können, wie z. B. eine 12V Batterie (Krankenwagen).
Maximale Eingangsspannung |
± 15 Volt verpolungssicher durch Gleichrichter PR2 |
Minimale Eingangsspannung |
± 11 Volt 1,2 A begrenzt durch MAX652 und durch Verluste, die durch den Gleichrichter PR2 hervorgerufe |
|
werden |
|
|
Begrenzung |
±16 Volt maximal mittels Zehnerdiode D41 |
2.1.1.1.3. Regler/Impulsladung
Dieser Regler wird entweder durch das Netz oder durch die Gleichspannung versorgt. Er erzeugt die Spannung VBC vo 6,9V max., die zum Laden der an J4 angeschlossenen Bleigelbatterie von 1,1 bis 1,3 Ah und der Elektronik benötigt wird.
Stecker J4:
1 |
+Batterie |
2 |
- Batterie |
Die Spannung VBC kommt direkt aus der Batterie, wenn keine externe Spannungsversorgung anliegt. Anderenfalls wir diese Spannung von der externen Spannungsversorgung geliefert, die dann die Elektronik versorgt und gleichzeitig di Batterie über die Diode D8 und die Sicherung F1 (Träge 1,6A) lädt:

ON/OFF Modul ( AN / AUS )
Die Steuervorrichtung von VbatC und +5 V wird mittels U2 4011, U4 4538 und dem bi-stabilen Relais RL1 G6AK-234P erzeugt. Diese Vorrichtung ist ständig durch die Spg. VBF versorgt.
2.1.1.1.3.1. Vorrichtung
Mit 3 Eingängen:
TON |
Taste ON |
Sekundärkontakt/GND |
TOFF |
Taste OFF |
Sekundärkontakt/GND |
|
|
|
CD ALIM |
TTL-Signal aktiv bei 1 |
Unterbrechung der Spannungsversorgung |
|
|
|
Mit 2 Ausgängen |
|
|
VBAT |
Versorgungsspannung Batterie/externe Spannungsversorgung |
|
OFF |
TTL-Signal offener Kollektor PULL-UP +5V Taste OFF gedrückt aktiv 0. |
|
|
|
|
2.1.1.1.3.2. Funktionsprinzip
Ein kurzer Tastendruck auf ON setzt die Versorgung mittels TON in Betrieb.
Ein verlängerter Tastendruck auf OFF unterbricht die Spannungsversorgung mittels dem vom Prozessor kommende Signal CDALIM.
Ein Zwangsaus wird durch einen verlängerten Tastendruck auf OFF (5s << t << 7s) erreicht.
Sowohl das Einals auch das Abschalten kann über ein externes Master-Modul erfolgen, und zwar durch die Signale CD ON und CD-OFF.
2.1.1.1.4. Versorgungsspannung VBAT und +5 Volt
Die Spannung VBAT kommt direkt von der Spannungsversorgung/Ladevorrichtung.
Sie dient der Versorgung der Anzeigevorrichtung und des Motors.
Diese Spannung ist abgreifbar an TP1 und J2.
|
Min |
Typ |
Max |
VBAT |
6,5 |
|
7 |
|
|
|
|
Die Spannung +5V ± 5% wird von der Batteriespannung VBAT erzeugt mittels LM2931 V3, um die Kapazität der Batteri besser nutzen zu können.
Diese Spannung ist an TP2 messbar. Die Zeit für den Anstieg auf 5V muss kürzer als 100 ms sein, um einen einwandfreie RESET der UC-Karte zu gewährleisten.
2.1.1.2. Motorsteuerungsmodul
Das Motorsteuerungsmodul für den Schrittmotor gibt es in zwei Ausführungen.
Version PILOT |
A2 |
Unipolarmotor, 24 Schritte/Umdrehung |
Version PILOT |
C |
Bipolarmotor, 24 Schritte/Umdrehung |
Die Spritzenpumpen PILOT A2, C sind mit einem Untersetzungsgetriebe versehen, das die Spindel mit einem doppelte Gewindegang dreht.
Eine Motorumdrehung entspricht 20 µm Schlittenvorschub.
Ein Motorschritt entspricht 0,8233 µm Schlittenvorschub.
2.1.1.2.1. Steuerung des Motors PILOT A2
Die Steuerung des Motors der PILOT A2 ist eine unipolare Schrittmotorsteuerung für einen Antriebsmotor vom Typ UBB (28 Ohm/Wicklung).
Die Steuerung wird durch ET U14 74HC08 und U15 ULN 2803 gewährleistet.
Diese Steuerung beinhaltet 8 darlingtons mit offenem Kollektor. Die Versorgungsspannung ist VBAT.
2.1.1.2.1.1. Eingangssignale
Diese Signale werden durch den Mikroprozessor auf der UC-Karte erzeugt und sind am Stecker J02 messbar. Dies steuern den IC U15 ULN 2803.
Phase A |
Phase A Motorsteuerung |
J2.5 |
Phase B |
Phase B Motorsteuerung |
J2.6 |
|
|
|
Phase C |
Phase C Motorsteuerung |
J2.7 |
|
|
|
Phase D |
Phase D Motorsteuerung |
J2.8 |
|
|
|
I |
Steuerung Motorstromreduzierung |
J2.9 |
|
|
|
2.1.1.2.1.2. Ausgangssignale
Diese Signale sind über J5 mit den Spulen des Motors verbunden.
Phase A |
Phase A Motor |
J5.6 |
Phase B |
Phase B Motor |
J5.5 |
|
|
|
Phase C |
Phase C Motor |
J5.4 |
|
|
|
Phase D |
Phase D Motor |
J5.3 |
|
|
|
2.1.1.2.1.3. Funktionsprinzip
Jede Motorspule wird angesteuert, wenn das entsprechende Phasensignal 1 ist.
Wenn das Stromregulierungssignal (I) 1 ist, wird die Spule direkt vom Darlington-Signal angesteuert.
Wenn das Signal I gleich 0 ist, wird die Spule über einen Widerstand von 470 Ohm vom Darlingtonsignal angesteuert, um den Stromverbrauch zu senken.
I mot für VBAT = 6,5 Volt |
VCEsat max |
|
|
ULN2803 1,5 Volt |
|
|
|
|
|
min |
max |
|
|
|
wobei I = 0 |
10 mA |
15 mA |
|
|
|
wobei I = 1 |
200 mA |
250 mA |
Der Motor wird je nach Geschwindigkeit in einem der beiden Modi angesteuert.
Modus |
Motorfrequenz (Schritt/s = Hz) |
Beschreibung |
1 |
0 bis 32.3 |
Strombegrenzung, 2 Phasen ON |
2 |
32.3 bis 325 für Pilot A2 |
keine Strombegrenzung, 2 Phasen ON |
2.1.1.2.2. Motorsteuerung der PILOT C
Die Motorsteuerung PILOT C ist eine bipolare Motorschrittsteuerung für den Typ UBB5 (11.5 Ohm pro Wicklung).
Die mit U13 L293E gebaute Steuerelektronik hat mehrere Funktionen und ermöglicht einen sparsamen Betrieb sowie eine optimalen Drehmoment je nach Geschwindigkeit.
2.1.1.2.2.1. Eingangssignale
Diese Signale werden vom Mikroprozessor der UC-Karte erzeugt und sind am Stecker J2 messbar.
Phase A |
Phase A Motorsteuerung |
J2.5 |
Phase B |
Phase B Motorsteuerung |
J2.6 |
Phase C |
Phase C Motorsteuerung |
J2.7 |
Phase D |
Phase Motorsteuerung |
J2.8 |
I |
Strombegrenzungssteuerung |
J2.9 |
|
|
|
BOOST |
Boosteraktivierung und Stromregulierung |
J2.10 |
|
|
|
1.0.0.2.4.3 Ausgangssignale
Diese Signale sind über J5 mit den Spulen verbunden.
Phase A |
Phase A Motor |
J5.6 |
Phase B |
Phase B Motor |
J5.5 |
|
|
|
Phase C |
Phase C Motor |
J5.4 |
|
|
|
Phase D |
Phase D Motor |
J5.3 |
|
|
|

2.1.1.2.2.2. Booster-Funktion
BOOST = 0 |
Der Motor wird durch VBAT der Batterie versorgt. |
BOOST = 1 |
Aktivierung der Booster-Funktion. Der Motor wird mit 12V versorgt. |
|
|
Die Spannung von 12 V ± 2 V wird mittels Spule L2, Diode D18, Kondensator C15 und Transistor T8 aus VBAT erzeugt. Die Spannung ist an TP5 messbar.
Die Schwingfrequenz wird durch einen Oszillator U9 hervorgerufen. Die Spannung wird erhöht, wenn der Boost auf 1 ist.
2.1.1.2.2.3. Funktion Soft-Start
Wenn der Boost auf 1 geht, kann durch die Soft-Start-Funktion die anfängliche Stromzufuhr reguliert werden.
2.1.1.2.2.4. Stromregulierungsfunktion
BOOST = 1 und I = 1 Aktivierung der Stromregulierung des Motors
Wenn die Funktion aktiviert ist, wird der Strom der einzelnen Wicklungen auf 240 mA ±10% gebracht. An TP6 und TP können die jeweiligen Amplituden der Wicklungen gemessen werden.
Die Stromstärke der einzelnen Spulen wird mit einem Sollwert verglichen, der von R31, R41/R37 und R42 vorgegeben wird Eine Warnung wird dann von IC11 realisiert, indem die H-Brücken des L293E aboder zugeschaltet werden.
Die Wiederholungsfrequenz von 25 KHz wird von IC10 geliefert.
1.0.0.2.4.3 Strombegrenzungsfunktion
Ist das Boost-Signal gleich 0, dient die I-Leitung als Strombegrenzung.
I = 1 |
Die Brücke wird von den Linien A, B und D angesteuert |
I = 0 |
Die H-Brücke ist offen, es fließt kein Strom in die Wicklungen. |
Der Motor wird je nach Rotationsfrequenz (Schritt/Schitt) in einem der drei Steuerungsmodi angesteuert.
Modus |
Schrittmotorfrequenz |
Beschreibung |
1 |
0 bis 32,3 |
Stromminderung, eine Phase ON |
2 |
32,3 bis 150 |
eine Phase ON, keine Stromregulierung |
3 |
150 bis 588 |
Stromregulierung, boost ON, zwei Phasen ON |
|
|
|
2.1.1.3. Analoges Ausgangsmodul
Das analoge Ausgangsmodul besteht aus einem digitalen Analogkonverter (10 bits 5 Kanäle MC 145053 U17) mit PCI-Bus
Die Bussignale SPI CLK SI SO CSADC können an J2 abgegriffen werden.
Der AD-Wandler liefert außerdem ein end of talk-Signal EOC.
Das CDANA-Signal, aktiv bei 1, steuert den Transistor T14 IRFD 9120, der wiederum die Spannung VREF in alles ode nichts ansteuert. Diese Spannung versorgt die Empfänger und dient als Spannungsreferenz für den ADC. Alle Testpunkt sind am Stecker J9 zusammengeführt.
Messen von VREF J9.7
Vref pulsiertes Signal 5 V ±0,25V
Eingänge des Konverters
ANO |
Messen der Batteriespannung VBAT |
AN1 |
Nicht verwendet |
AN2 |
Interne Verschlußmeßbrücke der PILOT C |
AN3 |
Nicht verwendet |
AN4 |
Empfänger der absoluten Schieberposition des Poti |
|
|
|
|

2.1.1.3.1. Messung der Batteriespannung
Die Spannung VBAT wird durch einen Spitzenspannungsdetektor gemessen, bestehend aus D19, R59, R60 und C23, s dass die Spannungstiefs, die durch den impulsartigen Strombedarf des Motors entstehen, nicht berücksichtigt werden.
Diese Spannung ist an J9.3 messbar.
Für VBAT = 6,5V V(J9.3)= 4V ±10% laufender Motor
120 ml/h |
PILOT |
A2 |
800 ml/h |
PILOT |
C |
|
|
|
2.1.1.3.2. Drucksensor Interface
Nur die Pilot C besitzt einen Drucksensor, der mit dem Kolben fest verbunden ist.
2.1.1.3.2.1. Besonderheiten des Drucksensors:
Technik des Sensors: |
Brücke mit 4 Eichmaßen. |
Impedenz |
350 Ohm ± 15 % oder 1 KOhm ± 15 %. |
Meßbereich |
0 bis 150 N |
Überlast |
250 N. |
Entfernung des Nullpunktes |
< ± 10 mV |
Empfindlichkeit |
8,5 bis 12 mV bei 150 N |
|
|
2.1.1.3.2.2. Funktionsprinzip :
Der Drucksensor liefert eine differentielle Spannung, die proportional der Kolbenkraft ist. Diese Spannung wird um 200 20 % durch einen Verstärker U18 TLC251erhöht. Der Potentiometer P1 ermöglicht ein Offset und eine Anfangseinstellung Das Eichen des Sensors mittels 2 bekannter Größen erlaubt die Definition des Sensors und der Messkettenfunktion.
AN3 J9.4 Pulsiertes Signal mit geregelter Amplitude von 0,6 V ± 0,05 V ohne Krafteinwirkung.
2.1.1.3.2.3. Verbindung des Drucksensors :
J8.1 |
VREF |
Vers (+) der Meßbrücke |
J8.2 |
S (-) |
Ausgang (-)der Meßbrücke |
J8.3 |
S (+) |
Ausgang (+)der Meßbrücke |
J8.4 |
GND |
Vers (-)der Meßbrücke |
2.1.1.3.3. Festellung der Position des Kolbens
Ein Potentiometer, der von der Bewegung des Antriebskopfes fortgezogen wird, ermöglicht die genaue Feststellung de Lage. Durch die Kalibrierung in 2 bekannten Positionen ist es möglich, die Lage dieses Potentiometers zu definieren.
Dieser Poti wird durch eine pulsierende Spg, VREF versorgt. Die Ausgangsspannung wird mittels R61 und C22 filtriert. Si ist direkt am Eingang AN4 (J9.2) angeschossen.
Anschlussbelegung :
J3.1 |
VREF |
|
J3.2 |
Mittelpunkt |
J9.2 |
|
|
|
J3.3 |
GND |
|
|
|
|
2.1.1.4. Optogabelmodul
Das Optogabelmodul umfasst 2 Lichtschranken:
qLichtschranke Motordrehzahl
qLichtschranke Spritzenerkennung
2.1.1.4.1. Drehzahlerkennung Motor
Diese Gabel ist auf einer Scheibe angebracht, die fest mit dem Motor verbunden ist.
Sie ermöglicht die Kontrolle der Rotation und der Drehrichtung. Die Diode des Optos wird mit Impulsen angesteuert, um Energie zu sparen.
Die Lichtschranke ist an J5 angeschlossen.
Steuerung |
Transistor T11 |
Strombegrenzung (R51) bei 8 mA |
|
|
Ausgang |
Transistor T10 |
Nivau TTL |
|
|
Steuerungssignal |
CDOPT1 |
aktiv bei 1 |
J2.14 |
|
Ausgangssignal |
SOPT1 |
aktiv bei 1 |
J2.11 |
J9.6 |
Anode Diode |
|
|
J5.7 |
|
Kathode Diode |
|
|
J5.8 |
|
Emitter Transistor |
|
J5.10 |
|
|
|
|
|
|
|
Kollektor Transistor |
|
|
J5.9 |
|
|
|
|
|
|
Td ON |
max 100 Mikrosekunden |
|
|
|
|
|
|
|
|
Td OFF |
max 200 Mikrosekunden |
|
|
|
|
|
|
|
|
Das SOPT1-Signal wird von U20 aufbereitet.
Die Steuersignale CDOPT1 und das Ausgangssignal SOPT1 werden von der UC-Karte sowohl generiert als auc verarbeitet und laufen über den Stecker J2.
2.1.1.4.2. Lichtschranke Spritzenkolbenerkennung
Die opto–gabel ist auf der Spritzenkolbenhaltevorrichtung angebracht. Sie ermöglicht die Kontrolle der Präsenz und de Haltens eines Spritzenkolbens. Die Lichtschranke ist an J8 angeschlossen.
Steuerung |
Transistor T12 |
Strombegrenzung R52 bei 8 mA |
|
|
Ausgang |
Transistor T13 |
Nivau TTL |
|
|
Steuerungssignal |
CDOPT2 |
aktiv bei 1 |
J2 15 |
|
Ausgangssignal |
SOPT2 |
aktiv bei 1 |
J2 12 |
J9.8 |
Anode Diode |
|
|
J8. 6 |
|
Kathode Diode |
|
|
|
J8. 5 |
Emitter Transistor |
|
|
J8. 10 gemeinsame Masse |
|
Kollektor Transistor |
|
|
J8. 7 |
|
SOPT2 |
0V |
Spritzenkolbenerkennung |
|
|
|
|
|
|
|
SOPT2 |
5V |
keine Spritzenkolbenerkennung |
|
|
|
|
|
|
|
Die Steuersignale CDOPT2 und das Ausgangssignal SOPT2 werden von der UC-Karte sowohl generiert als auc verarbeitet und laufen über den Stecker J2.
Die Diode des Optos wird durch Impulse angesteuert, um Energie zu sparen.
2.1.1.5. Switch Mikroschalter
2.1.1.5.1. Mikroschalter Entkopplung
Der Mikroschalter ist am mechanischen Block des Kolbens angebracht. Er wird betätigt durch den Entkopplungshebel.
Der Mittelpunkt des Schalters ist an GND angeschlossen.
Diese Signale laufen durch die Motorsteuerungskarte und sind an der UC-Karte an J2 zu messen.
J8.8 |
DEB/ON |
nicht verwendet |
|
|
J8.9 |
DEB/OFF |
0 |
V eingekoppelt |
J2.21 |
J8.9 |
DEB/OFF |
5 |
V entkoppelt |
J2.21 |
2.1.1.5.2. Mikroschalter Okklusion
Die PILOT A2 hat keinen Drucksensor. Die Okklusion wird mittels Federdruck festgestellt, der dann einen Mikroschalte auslöst.
Die Signale laufen nur über die Motorsteuerungsplatine und sind auf der UC-Karte an J2 zu messen.
J8.1 |
VREF |
nicht verwendet |
|
J8.2 |
OCC/ON |
nicht verwendet |
|
|
|
|
|
J8.3 |
OCC/OFF 0 V |
kein Gegendruck |
J2.23 |
J8.3 |
OCC/OFF 5 V |
Gegendruck |
J2.23 |
2.1.1.6. Optionale Module und Kommunikation
Für die PILOT Spritzenpumpe können drei zusätzliche Komponenten geliefert werden.
|
Schwesternruf |
RS 232 |
MASTER |
PILOT A2 |
(016020) Option |
- |
- |
PILOT A2 |
(016120) Option - |
serienmäßig |
- |
PILOT C |
Option |
serienmäßig |
serienmäßig |
2.1.1.6.1. Schwesternruf
Das monostabile Relais RL2, dessen 2 Kontakte sowie der Mittelpunkt auf dem Stecker J6 belegt werden können, wir durch das BUZ-Signal gesteuert, welches ebenfalls den Buzzer auf der Anzeigeplatine steuert.
J6. 6 |
gemeinsamer Mittelpunkt |
|
J6. 7 |
Kontakt normalerweise offen |
Unterbrechungsfähigkeit 24V 1A |
|
|
|
J6. 8 |
Kontakt normalerweise geschlossen |
|
|
|
|
2.1.1.6.2. Funktion RS 232
Die V24 RS232 Interface-Option ist nur aktiv, wenn eine Brücke zwischen den Pins 2 und 5 des J6-Stecker kurzgeschlossen ist.
J6. 1 |
Ausgang transmit data TX1 |
J6. 2 |
+ 5V ( DSR ) |
|
|
J6. 3 |
Eingang receive data RX1 |
|
|
J6. 4 |
GND |
|
|
J6. 5 |
Validierung (DTR) |
|
|
J6.17 |
CTS |
|
|
J6.18 |
RTS |
|
|
2.1.1.6.3. Verbindungskabel Konfiguration Masteranschluss
2.1.1.6.3.1. Verbindungskabel
Die Signale RX2, receive data und TX2, transmit data, werden vom asynchronen, seriellen Verbindungscontroller generiert Letzter befindet sich im Mikrorechner der UC-Karte, wobei die Signale lediglich von J2 bis J6 über die Motorsteuerungskart laufen.
Bei den PILOT A2 (016020)ohne RS232 ist diese Verbindung für die Konfiguration der Spritze gedacht.
J6.14 |
RX2 |
J2.31 |
J6.15 |
TX2 |
J2.32 |
J6.16 |
GND |
|
|
|
|
2.1.1.6.3.2. Masteranschluss
Die PILOT C kann über eine auf der Geräterückseite befindliche subD 15 Punkte mit einem Mastermodul verbunde werden.
Die Signale RX2 und TX2 dienen der Kommunikation mit dem Mastermodul.
J6.13 |
+ VBAT |
Versorgung des Masters |
J6.14 |
RX2 |
J2.31 |
|
|
|
J6.15 |
TX2 |
J2.32 |
|
|
|
J6.15 |
GND |
Masse Master - Versorgung |
J6.9 |
CD-ON |
Einschaltbefehl durch Master |
J6.10 |
CD-OFF |
Ausschaltbefehl durch Master |
J6.12 |
I-SECT |
Signal für Masterspannungsversorgung vorhanden |
J6.11 |
I-OPTOM |
Drehsignal des Motors vom Master kontrolliert |
2.1.2. Beschreibung der Anschlüsse
2.1.2.1. J1 Spannungsversorgungsstecker
Pin |
Beschreibung |
1 |
Masse |
|
|
2 |
PHASE |
|
|
2.1.2.2. J2 Verbindungsstecker UC - Karte
Pin |
Beschreibung |
|
1 |
+5V geregelte Spannung |
|
2 |
GND Spannungsversorgung |
|
3 |
+VBAT Spannungsversorgung |
|
|
|
|
4 |
GND Spannungsversorgung |
|
|
|
|
5 |
A Phase Motorsteuerung |
|
|
|
|
6 |
B Phase Motorsteuerung |
|
|
|
|
7 |
C Phase Motorsteuerung |
|
|
|
|
8 |
D Phase Motorsteuerung |
|
|
|
|
9 |
Motorsteuerungssignal |
|
10 |
BOOST Signal |
|
11 |
sopt1 Ausgang Lichtschranke Rotation |
|
12 |
sopt2 Ausgang Lichtschranke Spritzenkolbenerkennung |
|
13 |
nicht verwendet |
|
14 |
cdopt1 Steuerung Lichtschranke Rotation |
|
15 |
cdopt2 Steuerung Lichtschranke Spritzenkolbenerkennung |
|
|
|
|
16 |
OFF Signaltaste off gedrückt ON/OFF |
|
|
|
|
17 |
SECT Signal Spannungsversorgung vorhanden |
|
|
|
|
18 |
CDALIM Signal Spannungsversorgung unterbrochen |
|
|
|
|
19 |
LDSECT Steuerung der LED Spannungsversorgung |
|
|
|
|
20 |
CTS clear to send |
|
|
|
|
21 |
DEB/OFF Entkopplungssignal aktiv bei 0 |
|
22 |
RTS request to send |
|
23 |
OCC/OFF Okklusionssignal aktiv bei 0 |
|
24 |
BUZ Steuerung des Schwesternrufrelais |
|
25 |
EOC Kommunikationsende ADC |
|
26 |
CSADC Bus Auswahl SPI ADC |
|
27 |
CLK Bustakt SPI ADC |
|
28 |
SI data IN Bus SPI ADC |
|
|
|
|
29 |
SO data out Bus SPI ADC |
|
|
|
|
30 |
CDANA Steuerung Versorgung analoge Empfänger |
|
|
|
|
31 |
RX2 receive data TTL |
Leitung 2 |
|
|
|
32 |
TX2 transmit data TTL |
Leitung 2 |
|
|
|
Pin |
Beschreibung |
|
33 |
TXD1 transmit data TTL |
Leitung 1 |
|
|
|
34 |
RXD1 receive data TTL |
Leitung 1 |
|
|
|
35 |
TOFF Taste OFF |
|
|
|
|
36 |
TON Taste ON |
|
37 |
+VBAT Spannungsversorgung |
|
38 |
GND |
|
39 |
+5V |
|
40 |
GND |
|
2.1.2.3. J3 Steckverbindung Positionspotentiometer
Pin |
Beschreibung |
1 |
VREF |
2 |
Mittelpunkt |
3 |
GND |
2.1.2.4. J4 Interner Batterieverbindungsstecker
Pin |
Beschreibung |
1 |
+ Batterie |
2 |
- Batterie |
2.1.2.5. J5 Motorstecker
Pin |
Beschreibung |
1 |
+VBAT |
|
|
2 |
+VBAT |
3 |
PHASE D |
4 |
PHASE C |
5 |
PHASE B |
6 |
PHASE A |
7 |
Anode der Diode Dreherkennung /+5V |
8 |
Kathode der Diode Dreherkennung |
|
|
9 |
Kollektor des Transistors Dreherkennung |
|
|
10 |
Emitter des Transistors Dreherkennung / GND |
|
|
2.1.2.6. J6 Stecker Hinterwand
Der Hinterwandstecker umfasst folgende Signale : Externer Druckabgleich, serielle Schnittstelle RS232 Schwesternrufrelais und externe Konfigurationsleitung.
Pin |
Beschreibung |
|
1 |
TX1 transmit data |
Leitung 1 |
2 |
+5V |
|
3 |
RX1 receive data |
Leitung 1 |
4 |
GND |
|
|
|
|
5 |
Validierung Interface |
|
|
|
|
6 |
Mittelpunkt Schwesternrufrelais |
|
|
|
|
7 |
Schwesternrufrelais normalerweise offen |
|
|
|
|
8 |
Schwesternrufrelais normalerweise geschlossen |
|
|
|
|
9 |
CD ON external ON |
|
|
|
|
10 |
CD OFF external OFF |
|
11 |
I-OPTON output Motorkontrolle |
|
12 |
I-SECT led Netzstecker |
|
13 |
+ VBAT externe Spannungsversorgung |
|
14 |
RX2 receive data |
Leitung 2 |
 Loading...
Loading...