

Page 1

USER INSTRUCTIONS
MX/QX HART Field Unit
FCD LMENIM2340-00 – 1/14
Installation
Operation
Maintenance
Experience In Motion
Page 2
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Contents
1 Introduction 6
1.1 Purpose 6
1.2 How to Use This Manual 6
1.3 User Safety 7
1.4 User Knowledge 7
1.5 MX/QX HART System Capabilities and Features 7
1.5.1 General Network Specification 8
2 System Components and Installation 9
2.1 Introduction 9
2.2 Hardware 9
2.2.1 MX/QX Electronic Actuators 9
2.2.2 MX/QX HART Interface Board 11
2.2.3 Network Host 11
2.2.4 Network Cable 11
2.2.5 Typical HART Network Configuration 11
2.3 Network Cabling Topologies 12
2.4 Site and Network Cable Preparation 13
2.4.1 Site Preparation 13
2.4.2 Network Cable Preparation 13
2.4.2.1 Network Cable Connection to the MX/QX HART Unit 13
2.5 MX/QX HART Device Installation and Setup 14
2.5.1 MX/QX HART Device Installation 14
2.5.2 MX/QX HART Device Setup 14
2.6 Installation Verification 16
2.6.1 Network Cabling Installation Verification 16
2.6.2 MX/QX HART Device Installation Verification 16
2.7 Configuration Confirmation 17
2.7.1 Checking Connections 17
2.7.2 View Settings 17
2.7.3 Checking the Normal Display 18
2.8 MX/QX HART Device Description and Device Type Manager Files 18
3 Software 19
3.1 HART Protocol 19
3.2 HART Parameters 19
3.2.1 Analog Input Ratings 19
3.2.2 Field Device Status 20
3.3 Dynamic Variables 20
3.4 Device Variables 20
3.4.1 Supported Device Variables 20
3.4.2 Device Variable Mapping 21
3.4.3 Device Variable Units 21
3.5 Supported HART Commands 22
3.5.1 Universal Commands 22
3.5.1.1 Command 48 Data 24
3.5.2 Common Commands 29
3.5.3 Burst Messages 33
3.5.3.1 Update Periods 33
3.5.3.2 Commands Supported for Burst Message 34
2
3.5.3.3 Configuring a Device for Burst Mode Operation 34
3.5.3.4 Burst Message Trigger Mode 35
3.5.3.5 Burst Trigger Mode 35
Page 3
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Contents (Continued)
3.5.4 Event Notification 35
3.5.4.1 Configuring Event Notification 36
3.5.4.2 Handling of Event Notifications 37
3.5.4.3 Update Periods 37
3.6 Device-Specific Commands 37
3.6.1 Remote Configuration Mode 37
3.6.2 Partial Stroke Test 39
3.6.3 Actuator Commands 41
3.7 Calibration 42
3.7.1 Loop Current Trim Procedure 42
3.7.2 Re-range Procedure 45
3.7.3 Analog Signal to Primary Variable Process Flow 47
4 Associated Documents 49
5 How to Order Parts 50
Appendix A – Wiring Diagrams 51
Appendix B – HART Data Formats 52
Appendix C – Enumeration and Bit Field Tables 52-55
Appendix D – Setting Data and Time 56
Appendix E – Command Response Codes 56-67
flowserve.com
3
Page 4
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Figures
Figure 2.1a – MX-05 Actuator and Figure 2.1b – QX-05 Actuator 10
Figure 2.2 – Typical HART System With a DCS Host 11
Figure 2.3 – Point-to-Point Topology (Host Powered) 12
Figure 2.4 – Point-to-Point Topology (Loop Powered) 12
Figure 2.5 – Multi-drop Topology (Host Powered) 12
Figure 2.6 – Multi-drop Topology (Loop Powered) 13
Figure 2.7 – Connecting Network Cable to MX/QX Terminal Block 14
Figure 2.8 – MX/QX HART Setup Sequence 15
Figure 2.9 – MX/QX HART View Settings Sequence 17
Figure 2.10 – Normal Display 18
Figure 3.1 – Device Variable Mapping Setup 21
Figure 3.2 – Device Variable Units 22
Figure 3.3 – HART Diagnostics Data 28
Figure 3.4 – Burst Messages 34
Figure 3.5 – Trigger Mode 1 “Windowed” 35
Figure 3.6 – Event Notification 36
Figure 3.7 – Event Mask 36
Figure 3.8 – Remote Configuration Mode 37
Figure 3.9 – Analog Signal to Primary Variable Process Flow 48
Figure 5.1 – Device Variable Status Byte Format 53
4
Page 5
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Tables
Table 2.1a – MX Actuator Components and Table 2.1b – QX Actuator Components 10
Table 3.1 – HART Parameters 19
Table 3.2 – Analog Input Ratings 19
Table 3.3 – Field Device Status 20
Table 3.4 – Supported Dynamic Variables 20
Table 3.5 – Supported Device Variables 20
Table 3.6 – Mapping of Device Variables to Dynamic Variables 21
Table 3.7 – HART Universal Commands 22
Table 3.8 – HART Defined Status Bits 25
Table 3.9 – MX/QX Defined Status Bits 26
Table 3.10 – Common Commands 29
Table 3.11 – Trigger Source for Burst Message Commands 35
flowserve.com
5
Page 6
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Introduction
1
1.1 Purpose
This manual explains how to install and operate the MX/QX HART field unit. Actuators containing the HART field unit
may be connected by a standard instrumentation twisted-pair cable to form a HART communication system network.
The HART network employs a bi-directional communication protocol, operating at 1200 bits/sec, that provides data
access between intelligent actuators and host control/monitoring systems. In addition to a digital signal, the network
simultaneously provides a 4-20 mA analog signal that is proportional to the field unit’s primary measured value. This
system allows a host system such as a distributed control system (DCS) to control and monitor the actuators, including
the acquisition of status and alarm data from each MX/QX.
1.2 How to Use This Manual
Each section provides the MX/QX HART user with information on installing and operating the MX/QX HART field unit.
Section Title Description
1 Introduction
2 System Components
3 Installation and Configuration Provides details for installing and configuring a field unit.
4 Associated Documents
5 How to Order Parts
Appendix A Wiring Diagram Detail wiring connections to the MX/QX field unit.
Appendix B HART Data Formats Listing of HART parameters and descriptions.
Appendix C Enumeration and Bit Field Tables Explains field device bit masking information.
Appendix D Setting Date and Time Defines real-time clock configuration settings.
Appendix E Command Response Codes
Details user safety and knowledge requirements, system
capabilities and features.
Focuses on the description of the HART system hardware
and software components.
Provides a list of documents on related subjects for
additional MX/QX and HART system information.
This section provides part numbers and ordering contact
information.
Listing of response codes for all universal and common
HART commands.
6
Page 7

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
1.3 User Safety
Safety notices in this manual detail precautions the user must take to reduce the risk of personal injury and damage
to the equipment. The user must read and be familiar with these instructions before attempting installation, operation,
or maintenance. Failure to observe these precautions could result in serious bodily injury, damage to the equipment,
warranty void, or operational difficulty. User must follow local and state safety regulations.
Safety notices are presented in this manual in three forms:
c WARNING: Refers to personal safety. Alerts the user to potential danger. Failure to follow warning notices could
result in personal injury or death.
a CAUTION: Directs the user’s attention to general precautions that, if not followed, could result in personal injury
and/or equipment damage.
NOTE: Highlights information critical to the user’s understanding of the operator’s installation and operation.
1.4 User Knowledge
It is recommended that the user read this manual in its entirety before the MX/QX HART equipped actuator is installed
and operated.
The user needs to have a fundamental knowledge of electronics and microprocessor concepts. An understanding of
valve actuators and digital control systems is beneficial to the field unit user. Refer to the Glossary for terms used
throughout this manual.
The following websites have documents on HART and electric actuators: www.hartcomm.org and www.flowserve.com
For HART technology and cabling information, refer to the following documents:
HART Communication Protocol Specification: HCF_SPEC-13
HART Communication FSK Physical Layer Specification: HCF_SPEC-54
HART Communication Command Summary Specification: HCF_SPEC-99
HART Communication Universal Command Specification: HCF_SPEC-127
HART Communication Common Practice Command Specification: HCF_SPEC-151
HART Communication Common Tables: HCF_SPEC-183
1.5 MX/QX HART System Capabilities and Features
Limitorque’s HART field unit conforms to the HART Communication Protocol Specification (Document HCF_SPEC-
13). The device is suitable for use on point-to-point and multi-drop network topologies. The communication system
theoretically supports up to 26 actuators connected in a multi-drop network.
The MX/QX HART field unit fits in the actuator in the sealed electrical housing. Adjustments to the MX/QX HART
settings must be made from the configuration SETUP menu.
The MX/QX HART field unit may command its actuator to:
Open
Stop
Close
Move to a set position
Perform an emergency shutdown operation
Read and control relays
Perform partial stroke test
Monitor analog inputs and position
Monitor modes and alarms
7
flowserve.com
Page 8

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Commands to the unit come over the network from the host system, which may be:
• Personal Computer (PC)
• Distributed Control System (DCS)
• Programmable Logic Controller (PLC)
• Field Device Tool (FDT) w/Device Type Manager (DTM)
• Some other microprocessor-based device
A HART field device is an intelligent device within the actuator that can send multiple digital device variables to the
control system over a 4-20 mADC analog signal loop. The device provides control and self-test capabilities, which allow
abnormal conditions to be easily and immediately identified before an unplanned shutdown occurs.
Additional features and capabilities are:
• The system reduces the cost of wiring and installation – existing wiring and multi-drop connections can be used.
• The devices are interoperable – devices from different suppliers can communicate with one another on the same
network.
1.5.1 General Network Specification
System Specifications:
Communications using the HART Communication Foundation Protocol
Network Specificationss:
• Point-to-point and multi-drop topologies
• Master/slave communication
• Simultaneous 1200 bps digital communication without 4-20 mADC signal interruption
• Up to two masters per network (primary and secondary)
• Burst mode for continuous message broadcasting
MX/QX HART Unit Specification:
The field unit mounts in the actuator and is software-controlled in order to allow functionality of:
• Dynamic Variables PV, SV, QV and TV
• Device Variables: Position Setpoint, Measured Position, Torque, Motor Temperature and Compartment Temperature
• Network Communication
• Device-Specific Commands
System Host Specifications:
The HART master is the network system host, and can be a personal computer (PC), distributed control system (DCS),
programmable logic controller (PLC), or another microprocessor-based device. The HART protocol allows for up to
two masters (primary and secondary) per network loop. Secondary masters, such as handheld communicators, can be
used without interrupting communications between the primary master and field devices.
8
Page 9

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
System Components
2
and Installation
2.1 Introduction
This section is an overview of the components used in the HART system and their installation. The MX/QX HART unit is
installed in the MX or QX actuator, as shown in Figures 2.1 and 2.2. The network cable connects to the HART unit at the
actuator terminal block. The network cable connects to the distributed control system, which usually acts as the host.
2.2 Hardware
2.2.1 MX/QX Electronic Actuators
The MX/QX actuators control the opening and closing of valves. The MX is a multi-turn valve, while the QX is a quarterturn valve actuator. Both actuators are designed for operation of ON-OFF and modulating valve applications.
The MX/QX features include the following:
• Non-intrusive setup
• Separately sealed terminal compartment
• Patented absolute encoder for valve position sensing (no battery required)
• Graphical LCD for indication and calibration
• Sophisticated electronic control, monitoring, and diagnostic capabilities with patented LimiGard™ technology
NOTE: Recommended storage procedures for the MX are detailed in Bulletin LMENIM2306, MX Maintenance and
Spare Parts Manual. QX procedures are detailed in Bulletin LMENIM3306, QX Maintenance and Spare Parts Manual.
Failure to comply with recommended procedures will void the warranty. For longer-term storage, contact Limitorque for
procedure and recommendations.
flowserve.com
9
Page 10
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
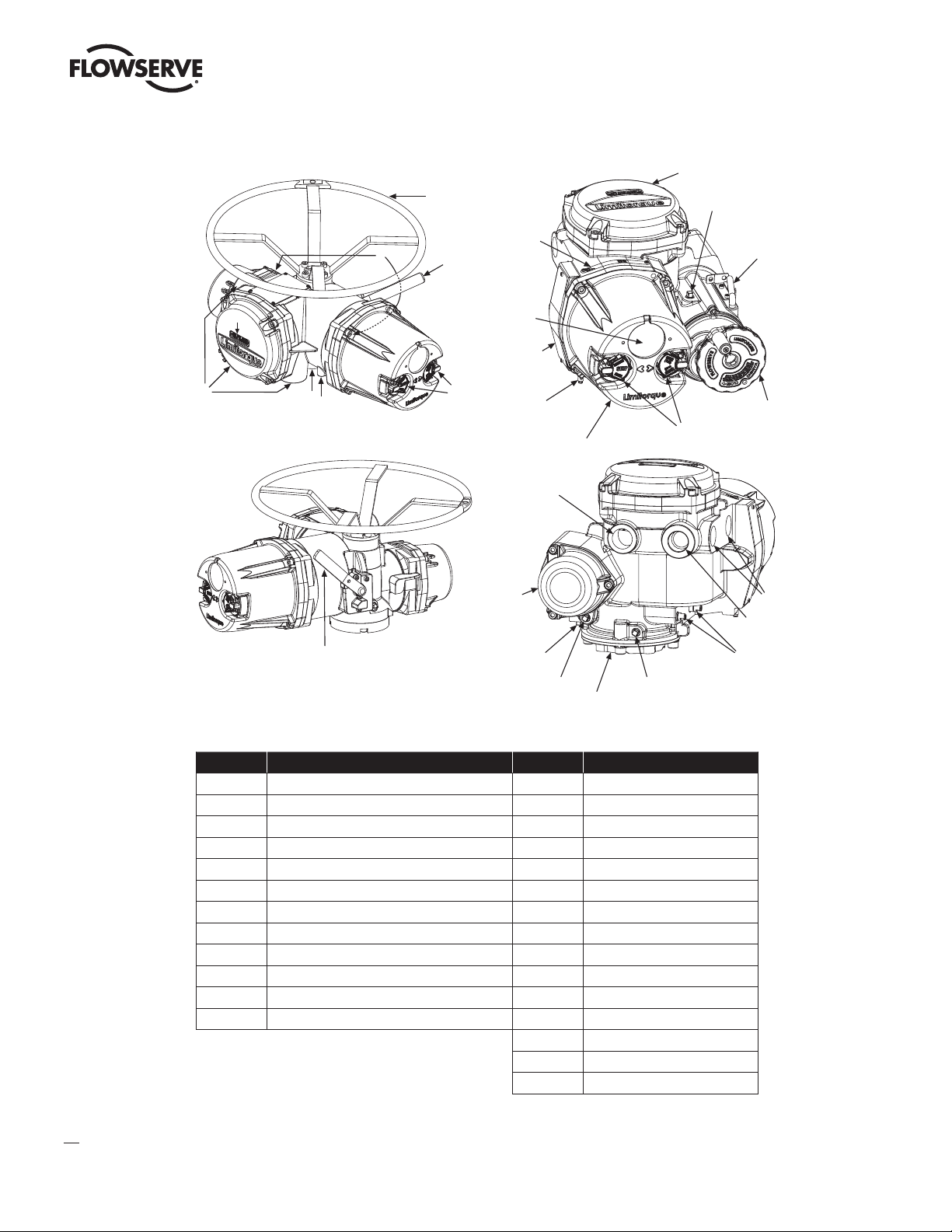
Figure 2.1a – MX-05 Actuator Figure 2.1b – QX-05 Actuator
1
10
3
11
13
5
12
2
9
OPTIONAL
15
1
9
7
4
9
3
14
8
6
3
3
11
10
9
12
4
8
7
2
2
5
6
10
Table 2.1a – MX Actuator Components Table 2.1b – QX Actuator Components
Item Description Item Description
1 Handwheel 1 Handwheel
2 Declutch lever 2 Declutch lever (QX-05)
3 Oil fills (dotted arrow depicts fill on declutch side) 3 Oil fill
4 Controls compartment (field unit location) 4 Controls cover
5 LCD display 5 LCD display
6 Control knobs 6 Control knob
7 Ground lug 7 Ground lug
8 Thrust/torque base 8 Baseplate
9 Conduit entries 9 Conduit entry
10 Terminal compartment 10 Terminal compartment
11 Electric motor 11 Motor
12 Nameplate 12 Certification nameplate
13 Tag nameplate
14 Oil plug
15 Stem nut stops
Page 11
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
2.2.2 MX/QX HART Interface Board
The MX/QX HART field unit interface board is installed in the actuator controls compartment (Figures 2.1 & 2.2 and
Tables 2.1 & 2.2). This unit permits the actuator to be controlled by a DCS or other network host over the HART
network.
The following commands and feedback information are transmitted through this unit:
• OPEN, CLOSE and STOP commands
• ESD (Emergency Shutdown) commands
• Partial Stroke Test commands
• Unit output torque (0-100% rating)
• Go-to-position commands
• Actuator status, alarm and diagnostic messages
• User analog input feedback
2.2.3 Network Host
The HART network is a master/slave communication protocol. Communication to each slave (MX/QX field device) is
initiated by a master (system host device). Two masters can connect to each HART loop. Normally, the primary master
is a DCS, PLC, or PC. If desired, a handheld communicator or PC can serve as the secondary master.
2.2.4 Network Cable
Network cabling should be in accordance with the HART Communication Foundation guidelines. In general, wiring for
HART devices is the same as for conventional 4-20 mA instrumentation. It is recommended to use individually shielded
twisted pair cable. The minimum conductor size is 0.51mm diameter (#24 AWG) for cable runs less than 1500 meters
(5000 ft.), and 0.81mm diameter (#20 AWG) for distances up to the 3000 meter (10 000 ft.) theoretical limit for HART
communication. Please note that the electrical characteristics of the cable, especially capacitance, and the number of
network field devices can affect the maximum allowable cable length.
To prevent signal loop interference, tie all cable shields together and ground at only one point.
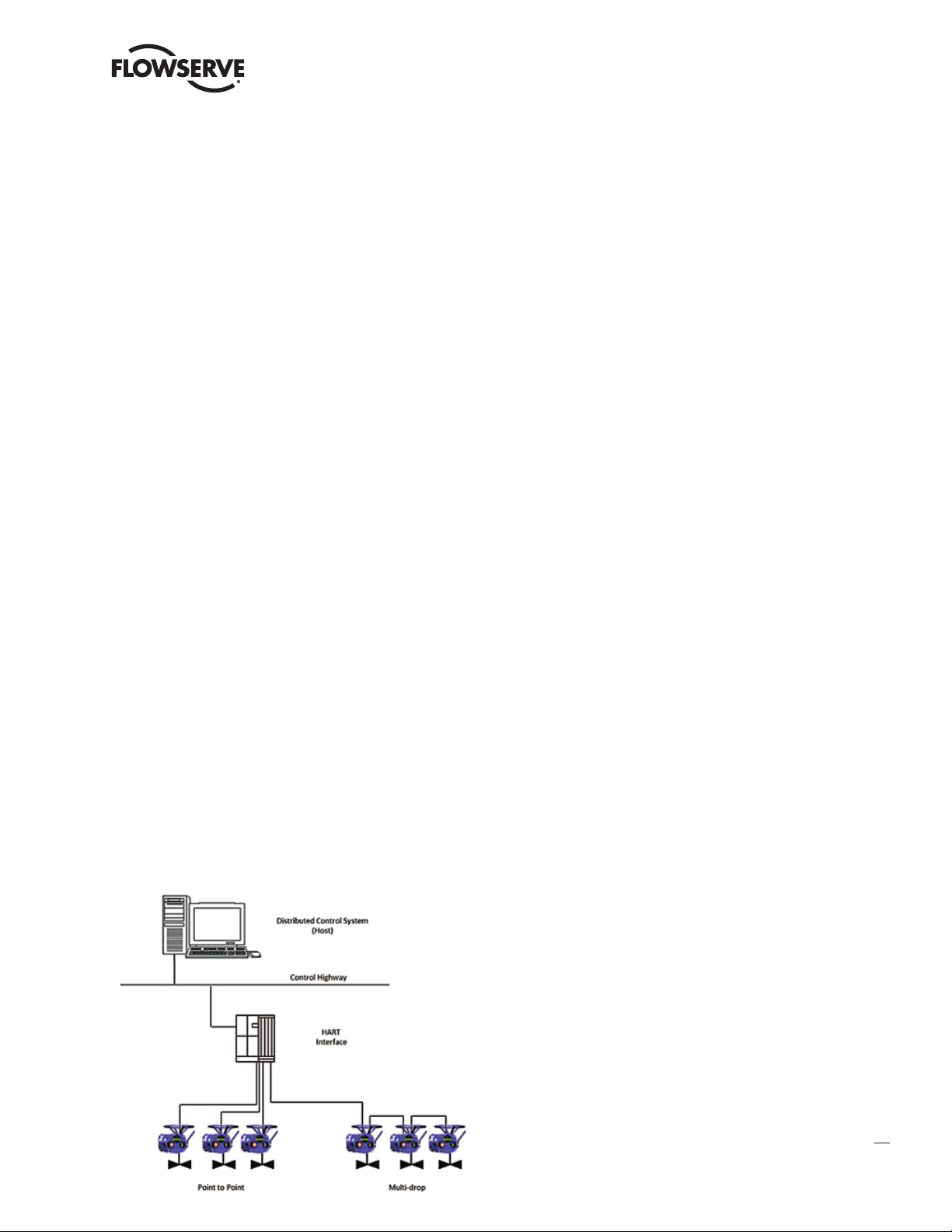
2.2.5 Typical HART Network Configuration
A typical MX/QX HART system is shown below:
Figure 2.2 – Typical HART System With a DCS Host
flowserve.com
11
Page 12
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
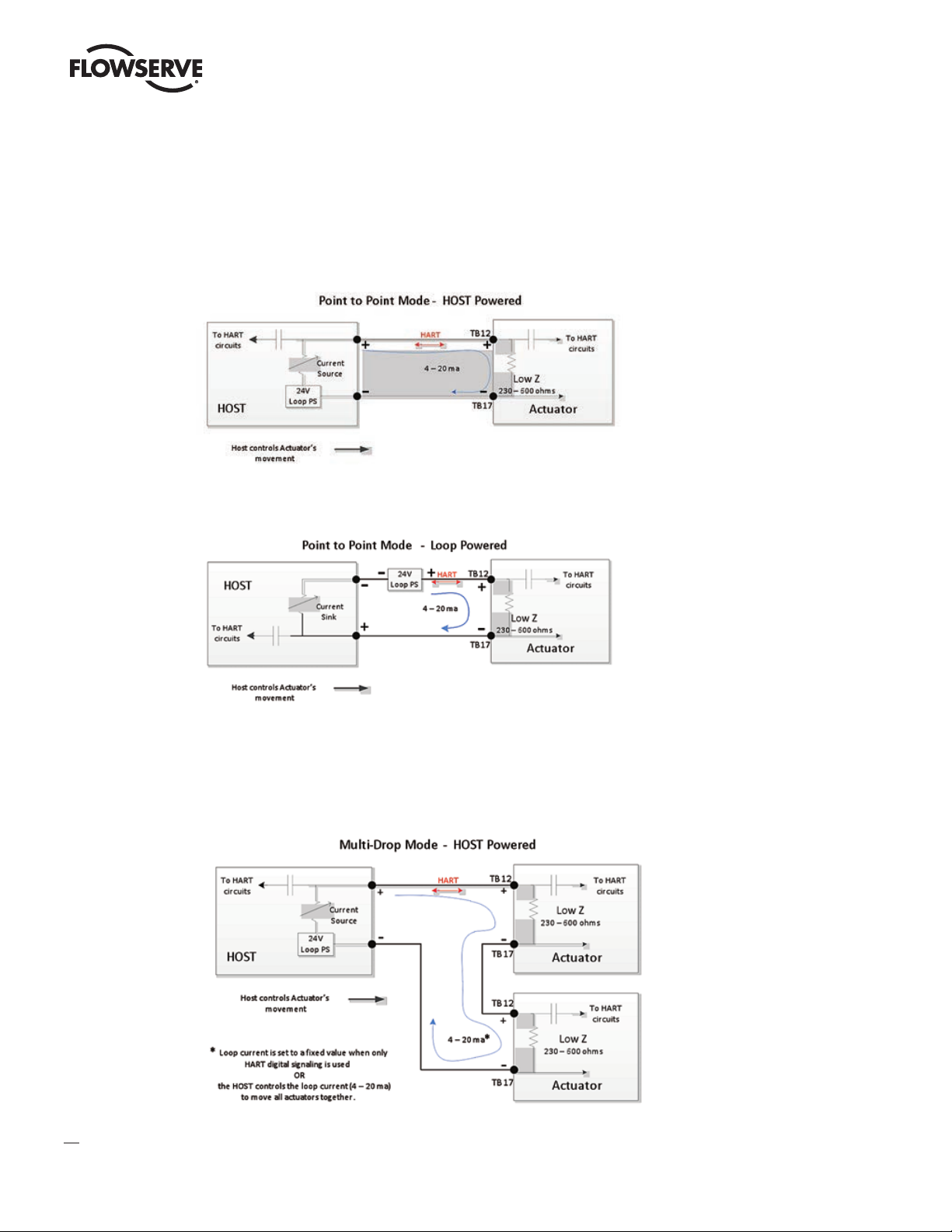
2.3 Network Cabling Topologies
There are two main topologies for MX/QX HART networks:
Point-to-point One field device connected to the bus (network)
Figure 2.3 – Point-to-Point Topology (Host Powered)
Figure 2.4 – Point-to-Point Topology (Loop Powered)
12
Multi-drop Multiple field devices connected to the bus (network)
Figure 2.5 – Multi-drop Topology (Host Powered)
Page 13
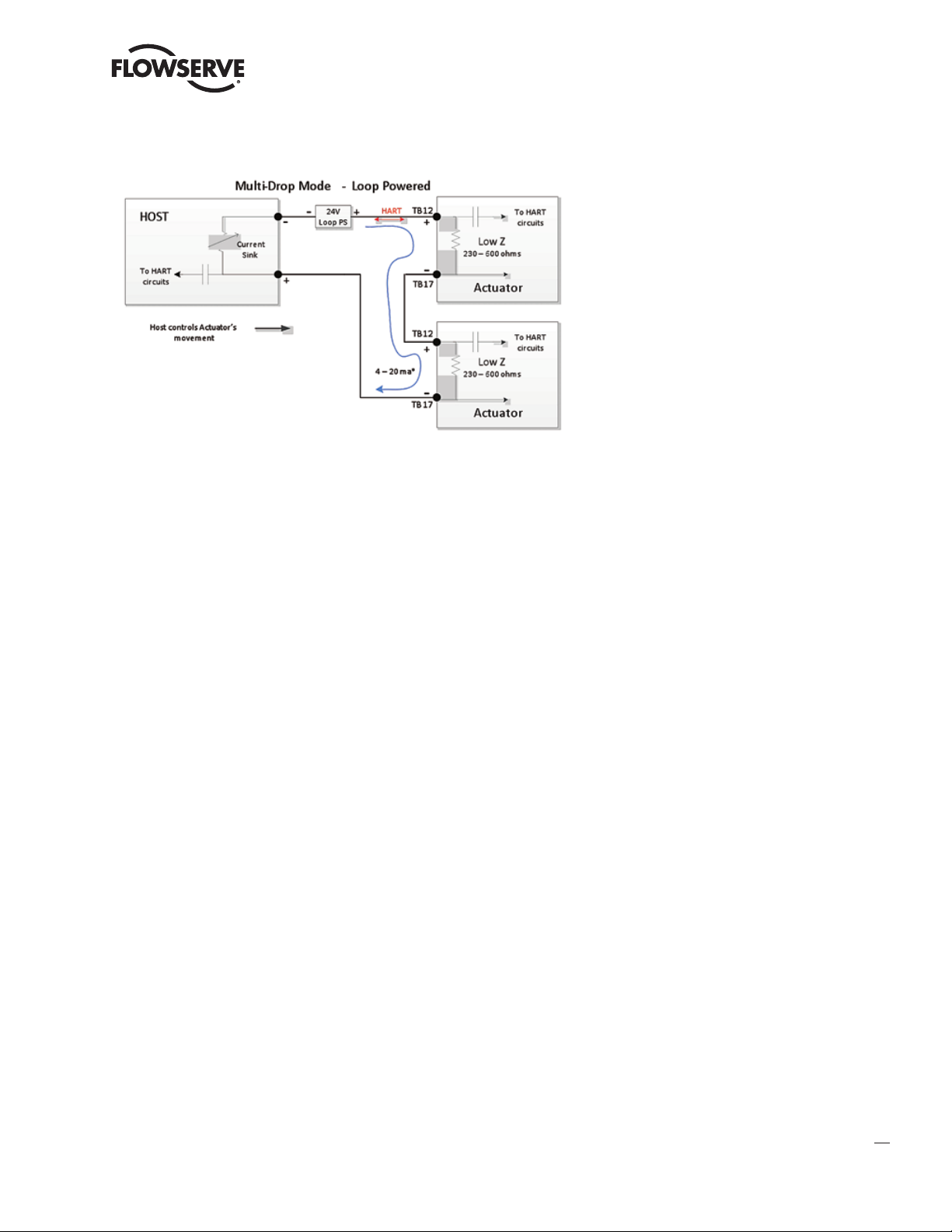
Figure 2.6 – Multi-drop Topology (Loop Powered)
2.4 Site and Network Cable Preparation
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
2.4.1 Site Preparation
Prepare the site and associated equipment for operation of the MX/QX HART actuators as follows:
1. Prepare a detailed site plan consisting of the following:
• Actuator locations and tag numbers
• Junction boxes, terminal strip locations and tag numbers
• Power supplies/conditioners
• Provide free access to the MX/QX control panel and terminal block for setup, configuration and troubleshooting.
2. Prepare the cable and label all wires.
3. Install power and control wires in separate conduits.
4. Install and verify earth grounds. The cable shields should be tied together and grounded at only one point. The
single ground point is typically located at or near the system host device.
2.4.2 Network Cable Preparation
Care must be taken during cable preparation:
• When stripping the insulation, use wire strippers that do not nick the wire.
• Use crimp ferrules to prevent stranded wires from getting loose and shorting to other wires.
• Use vibration-resistant wiring terminals that hold the ferrule securely.
2.4.2.1 Network Cable Connection to the MX/QX HART Unit
The field device is connected to the network through the MX/QX terminal block. The network cable is connected to the
terminal block shown in Figure 2.7.
13
flowserve.com
Page 14
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
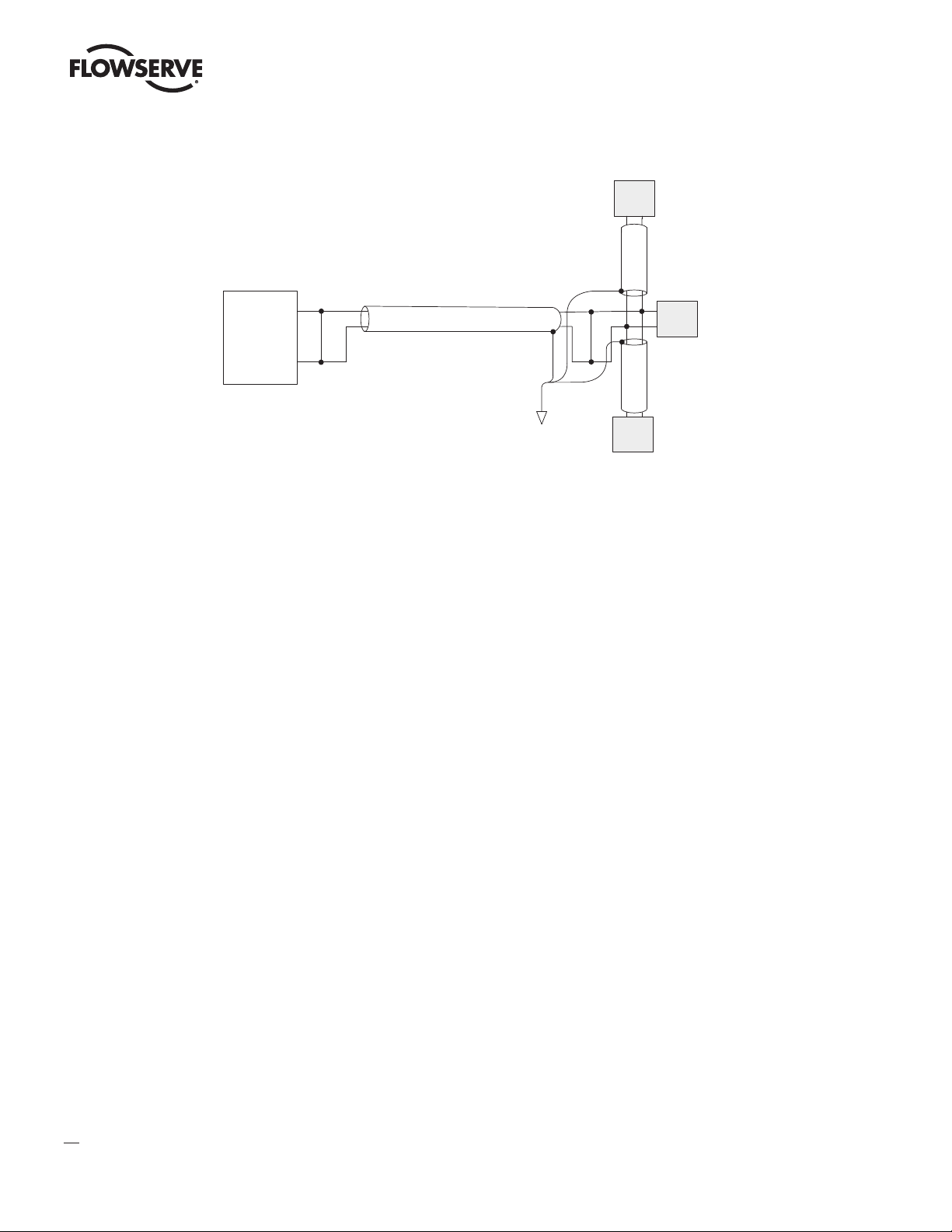
Figure 2.7 – Connecting Network Cable to MX/QX Terminal Block
Shielded Wire Pair
HART
Interface
Field
Device
Field
Device
Connect Shield
to Ground at one
place only
Field
Device
Connect the network cables to the MX/QX terminal block as shown in Figures 2.3 – 2.6. Refer to Appendix A for unit
wiring diagram.
Connect the cable shields to each other inside the unit. Do not connect them to the unit in any way. The network shield
should be grounded at only one place in the network. If it is desired to ground the entire network shield at the actuator,
then install a jumper cable from terminal 3 to earth ground or ground lug.
NOTE: The MX/QX HART device is sensitive to polarity. The cables should be labeled to indicate polarity, and polarity
should be maintained through all connection points.
2.5 MX/QX HART Device Installation and Setup
2.5.1 MX/QX HART Device Installation
The MX/QX HART field unit is located in the controls compartment. It has four standoffs and mounts on top of the
main processor board. Multiple Input/Output (I/O) option boards may also be present. If present, the I/O board will be
on top of the MX/QX HART unit. For installation instructions, refer to the MX Maintenance and Spare Parts Manual,
LMENIM2314 or the QX Maintenance and Spare Parts Manual, LMENIM3314.
14
2.5.2 MX/QX HART Device Setup
The MX/QX HART option enables the actuator to be controlled by a HART communications signal. If the option has
been purchased, it is automatically enabled.
NOTE: If the HART option has not been purchased, the screens for changing HART will not be available. To add the
HART option, please consult Limitorque service at (434) 528-4400.
Figure 2.8 illustrates the setup sequence. For proper operation, the correct mode must be selected.
To set up the MX or QX HART device, enter the Setup mode as detailed in Installation and Operation Manual Bulletins
LMENIM2306 for the MX and LMENIM3306 for the QX;
Page 15
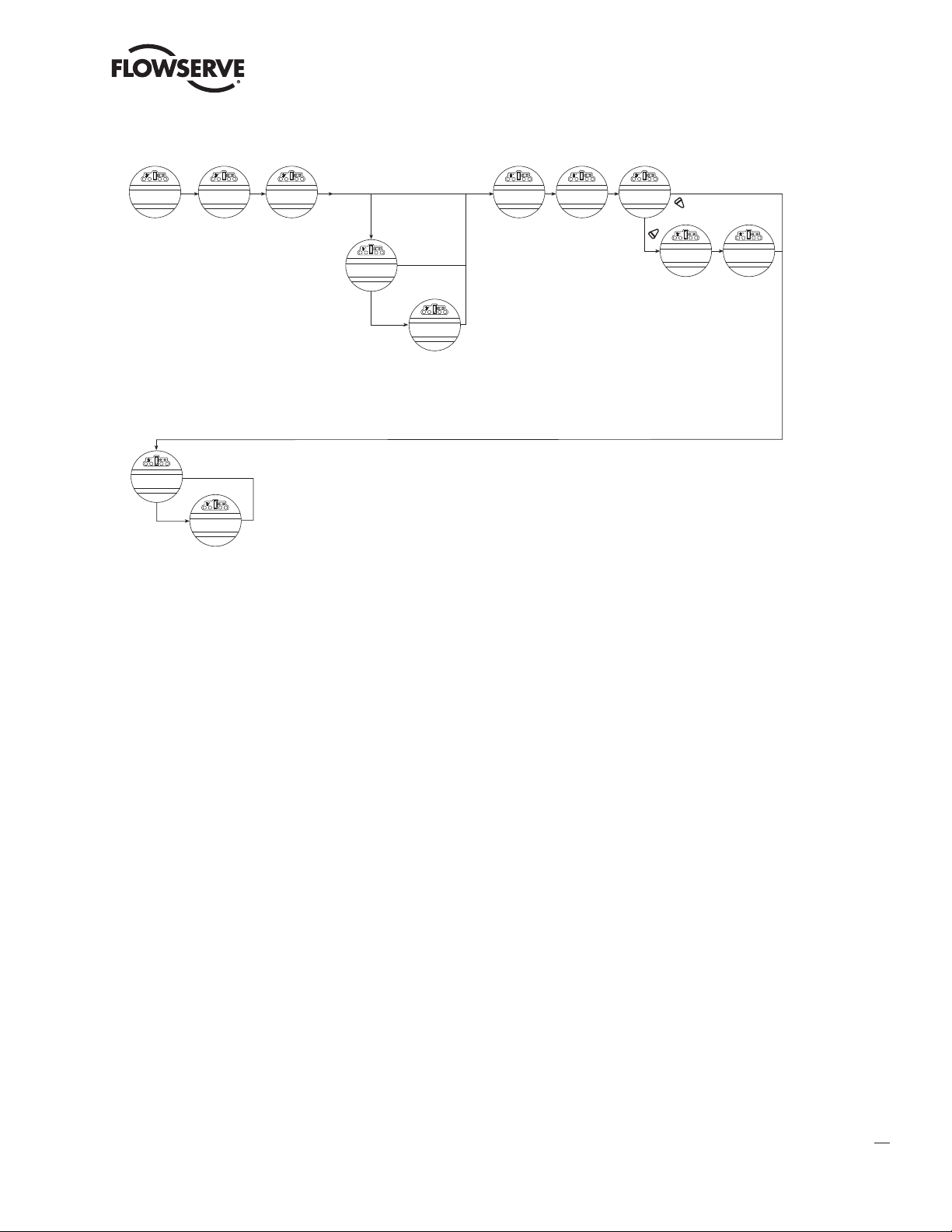
Figure 2.8 – MX/QX HART Setup Sequence
ESD ACTION
(IGNORE)-OK?
(CLOSE)- OK?
(STOP)- OK?
(OPEN)- OK?
(POSITION)- OK?
CHANGE
HART
STATUS
(ON)-OK?
(OFF)-OK? (ENABLED)-OK?
MOVE TO
XXX% OPEN
MULTI-DROP
(DISABLED)-OK?
If Hart Actuator
& not Multidrop
FAIL POSITION
(CLOSED)-OK?
If fail position is
“position”
If fail position is
not “position”
(OPEN)- OK?
(STOP)- OK?
(POSITION)- OK?
XXX%-OPEN
MOVE TO
If Hart Actuator
& Multidrop
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
POLLING ADDRESS
(0)-OK?
Address default is zero
Range is 0-63
SAVE
SETTINGS-OK?
CHANGE PROP/
DEADBAND?
YES
NO
PROP BAND
(5%)-OK?
DEADBAND
(2%)-OK?
NOTE: This menu is displayed after the actuator and HART board have been powered up together at least one time.
1. Proceed through Setup to the CHANGE HART? display. Select YES to get to the STATUS display.
2. STATUS enables the user to change from the default condition to turn on and off the network control capability of
the actuator. Select NO to change the setting or YES to get to the next display. (Default = ON)
3. MULTI-DROP (ENABLED) or (DISABLED) allows the user to select the desired network topology. To change the
setting, select NO until the required option is displayed. Select YES if the setting is correct to go to the next display.
NOTE: Changing the topology also requires that the network be wired correctly for the selected topology.
NOTE: If MULTI-DROP ENABLED was chosen, skip to step 5. Otherwise, FAIL POSITION display is shown. In multi-drop
mode the input is digital only (write PV over network), so there is no analog fail action.
4. FAIL POSITION allows the user to configure the action desired upon loss of the analog input signal. The selections
are CLOSE, OPEN, STOP and POSITION. Select the desired setting and proceed to the next display.
NOTE: If POSITION is chosen as the action, a MOVE TO display will be shown where the user can select the desired
position between 0 and 100% open, in one percent increments, by selecting NO until the desired position is selected.
Select YES once the setting is correct to go to the next display.
5. POLLING ADDRESS allows the user to set the HART polling address of the unit. Point-to-Point units are typically
set to address 0, and Multi-drop units are typically set from 1-63. HART 5 masters will always set Point-to-Point
units to address 0.
6. SAVE SETTINGS allows the user to save the settings and make them active. This can result in a change in the
hardware configuration on the HART board to support the change in configuration. Select NO to return to STATUS
(step 2) and change settings. Select YES to save the HART configuration settings and go to additional network
settings.
NOTE: The configuration set in steps 1-6 will not be saved if the user does not select YES for SAVE SETTINGS.
flowserve.com
15
Page 16

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
7. CHANGE PROP/DEADBAND allows for the setting of proportional band and deadband. Proportional band is the
range of errors between the position and demand signal that will produce reduced speed (pulsing). The default
value is 5%. To change from default, select NO until the required value is displayed. The value is adjustable between
1% and 100%, in 1% increments. The default deadband value is 2%. For error signals less than this, no motion
occurs. The deadband should be wide enough to prevent “hunting” of the actuator but as low as possible to give
adequate response to changes in the error signal. To change from the default, select NO to adjust the value between
1% and 50%, in 1% increments to suit the application.
8. ESD ACTION allows a network ESD function to be enabled after the ESD configuration has been established for the
unit. This network ESD can be selected to do one of the following: ignore the command (NONE), CLOSE, OPEN,
STOP or POSITION the actuator. To change from the default setting, select NO until the required option is displayed.
Select YES if the setting is correct to go to the next display.
NOTE: If POSITION is chosen as the action, a MOVE TO display will be shown where the user can select the desired
position between 0 and 100% open, in one percent increments, by selecting NO until the desired position is selected.
Select YES once the setting is correct to go to the next display.
.2.6 Installation Verification
2.6.1 Network Cabling Installation Verification
After installation is complete and prior to operation, inspect the network cable and its connection to each field device.
NOTE: Units should be disconnected from power. The network should be disconnected from the host device.
Check for the following:
1. There should not be:
• Nicks in the insulation - this can cause a short to the grounded shield.
• Cut strands in a stranded conductor - this can cause a poor connection and eventually an open circuit.
2. The shield/drain wire should only be grounded at one point in the segment to avoid ground loop problems.
3. The ground/earth connection should be at true ground potential and effective at all times. See step No. 5 in Section
2.4.1, Site Preparation.
2.6.2 MX/QX HART Device Installation Verification
Verify the field device is installed as follows:
1. Enter the Setup mode as detailed in Installation and Operation Manual Bulletins LMENIM2306 for the MX or
LMENIM3306 for the QX.
2. In the Setup mode, use the black control knob to select YES to the main menu selection. VIEW DIAGNOSTICS?
3. Select YES to the display VIEW HARDWARE STATUS?
4. Select YES to scroll through the menu selections. The LCD will read HART BOARD 1 (OK) - NEXT? if installed.
NOTE: If the HART BOARD 1 (OK)? does not appear, contact Limitorque for assistance.
5. To return to the normal display, use the black knob to select either LOCAL or REMOTE.
16
Page 17
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
2.7 Configuration Confirmation
Field device operation cannot be verified until the complete HART system is operational. However, routine checks can
be performed to verify many functions.
2.7.1 Checking Connections
Verify that all connections, including data wires, shield ground, digital inputs (optional), digital outputs (optional), and
analog inputs are in accordance with MX/QX wiring diagrams and MX/QX HART device diagrams in Appendix A.
2.7.2 View Settings
Refer to Installation and Operation Manual Bulletins LMENIM2306 for the MX and LMENIM3306 for the QX to access
the view settings menu. Verify the settings as follows:
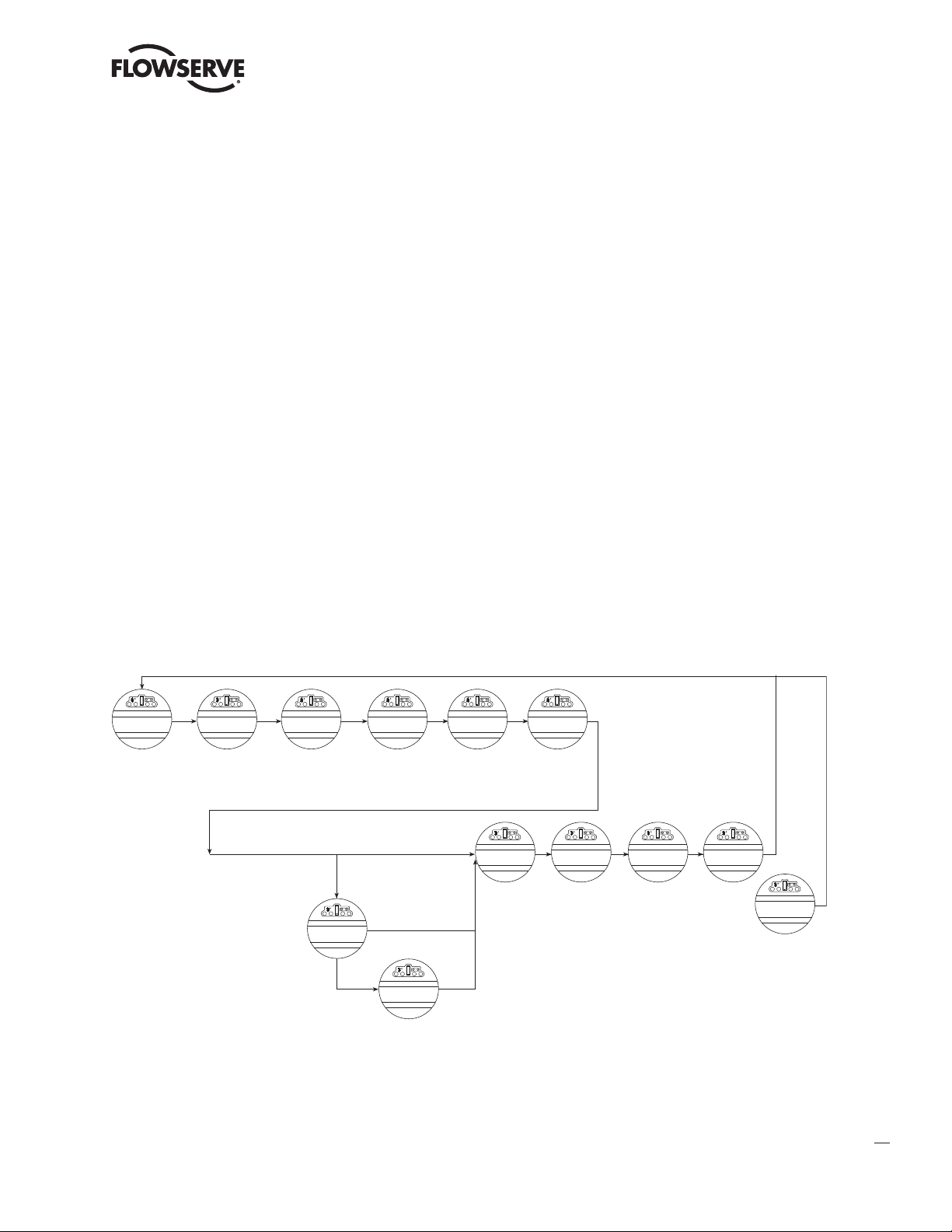
1. From the VIEW SETTINGS display, scan to the VIEW HART? display
2. From VIEW HART? display, select YES and check that the HART status is ON. This confirms that HART is enabled.
3. From HART STATUS display, select YES to go to next display, which is DEVICE ID. This is the Unique Device ID of
the HART device.
4. If the MX/QX contacts are to be controlled via the network to control external equipment, from the VIEW HART?
display, select NO and obtain the VIEW STATUS AND ALARM CONTROL? display. Verify that the digital outputs,
S1a, S1b, S2a, S2b are set for “Network” controlled.
Figure 2.9 – MX/QX HART View Settings Sequence
VIEW
HART?
STATUS
(ON)-OK?
DEVICE ID
3295509-OK?
If Hart Actuator
& not Multidrop
FAIL POSITION
(CLOSE)-OK?
If fail position is
“position”
HART-1 FIRMWARE
REV 25-OK?
MOVE TO
XXX% OPEN
If Hart Actuator
& Multidrop
If fail position is
not “position”
HART-1 HARDWARE
REV 25-OK?
POLLING ADDRESS
(0)-OK?
MULTI-DROP
(DISABLED)-OK?
PROP BAND
(5%)-OK?
DEADBAND
(2%)-OK?
ESD ACTION
(IGNORE)-OK?
MOVE TO
XXX% OPEN
flowserve.com
17
Page 18

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
2.7.3 Checking the Normal Display
Place the selector switch in LOCAL or REMOTE position. The valve position will be indicated at the top of the LCD.
STATUS OK or HARDWARE FAILURE should be indicated at the bottom of the LCD display.
• If STATUS OK is displayed, then the HART board hardware is OK.
• If HARDWARE FAILURE and HART-1 FAILED or HART-1 NOT PRESENT is displayed, no communication is occurring.
This could be due to a number of factors. Check all local connections and configurations. If these are correct and the
HARDWARE FAILURE is still displayed, then the solution to this problem must await full system commissioning.
Figure 2.10 – Normal Display
Remot e
or
Local
100% OPEN
STATUS OK
2.8 MX/QX HART Device Description and Device
Type Manager Files
In the Host system, the configuration device can use Device Description (DD) files to configure a HART system without
having the devices online. Please refer to your host system documentation for the files that are needed. The Device
Type Manager (DTM) file provides an interface between the actuator’s specific application software and a Network
Host Station’s Field Device Tool (FDT) frame. The DTM can be integrated into FDT frame applications to allow users
to perform offline and online parameterization, configuration, and status and diagnostic retrieval. The DD files are
downloaded from the HART Communication Foundation website (www.hcfcomm.org) into the DCS workstation or
host device.
In addition, the DD and DTM files can be downloaded from the Flowserve Limitorque website: www.flowserve.com
18
Page 19
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Software
3
3.1 HART Protocol
The system uses the HART protocol to communicate over the HART network with other HART devices. The HART
protocol is a master/slave communication service for process control devices. HART digital signaling is an extension of
conventional analog signaling allowing the network signal to ride on the 4-20 mADC analog process signal. It uses
1200 bps binary phase-continuous Frequency-Shift-Keying (FSK), where a high frequency current is superimposed on
a low-frequency (typically 4-20 mADC) analog current.
3.2 HART Parameters
Table 3.1 – HART Parameters
Parameter Value
HART Version 7.3
Expanded Device Type = Manufactuer ID + Device Type 0x3008
Physical Layer Supported FSK
Physical Device Catagory Actuator
Maximum Number of Burst Messages 3
Maximum Number of Event Messages 1
Size of the Event Queue 6
Maximum Number of Trends 2
Size of the Trend Buffer 12
Default Number of Preambles1 5
3.2.1 Analog Input Ratings
Table 3.2 – Analog Input Ratings
Maximum current2 30.0 mA
Maximum voltage 50 V
Current over-range
(Primary Variable Out of Limits)
Multi-drop current draw Approximately 2 mA
1. Field Device must have minimum 5 preambles, and maximum 20 preambles.
2. The analog input is automatically bypassed, if the maximum loop current is reached. The field device will continue to check the circuit for overload on a periodic basis,
and will restore the connection if the overload clears.
Analog Input > 21 mA
Analog Input < 3 mA
(HART communication may fail, if Analog Input <2 mA.)
19
flowserve.com
Page 20
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
3.2.2 Field Device Status
The Field Device Status is contained in the second data byte in a Slave-to-Master frame as a bit field table. It indicates
the current operating status of the field device as a whole and is not associated with the completion of any command.
Table 3.3 – Field Device Status
Bit Mask Description
0x01 Primary Variable Out of Limits – The PV is beyond its operating limit.
0x02 Non-Primary Variable Out of Limits – A device variable not mapped to PV is beyond its operating limits.
0x04
0x08 Loop Current Fixed – The loop current is being held at a fixed value and is not responding to process variations.
0x10 More Status Available – More status information is available via Command 48, Read Additional Status Information.
0x20 Cold Start – A power failure or Device Reset has occurred.
0x40 Configuration Changed – An operation was performed that changed the device’s configuration.
0x80 Device Malfunction – The device detected a serious error or a failure that compromises device operation.
Loop Current Saturated – The loop current has reached its upper (or lower) endpoint limit and cannot increase (or
decrease) any further.
3.3 Dynamic Variables
The Limitorque HART actuator device supports the following Dynamic Variables:
Table 3.4 – Supported Dynamic Variables
Variable Code Variable Direction Physical Interface
0 PV (Primary Variable) input Analog current input – Analog Channel 0
1 SV (Secondary Variable) output None
2 TV (Tertiary Variable) output None
4 QV (Quaternary Variable) output None
3.4 Device Variables
3.4.1 Supported Device Variables
The Limitorque HART actuator device supports the following Device Variables:
Table 3.5 – Supported Device Variables
Variable
Code
Variable Direction Unit Code
0 Position setpoint input % (57) Not Classified (0) Valve/Actuator (6) 0-100
1 Current position output % (57) Not Classified (0) Not Used (250) 0-100
2 Torque output % (57) Not Classified (0) Not Used (250) 0-100
3 Motor temperature output °C (32), °F (33) Temperature (64) Not Used (250) Not Limited
Compartment
4
temperature
output °C (32), °F (33) Temperature (64) Not Used (250) Not Limited
Device Variable
Classification
Device Variable
Family
Range
20
Page 21
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
3.4.2 Device Variable Mapping
Device Variables may be mapped to the Dynamic Variables according to the following table:
Table 3.6 – Mapping of Device Variables to Dynamic Variables
Variable
Code
0 PV input Position Setpoint Position Setpoint
1 SV output Current Position Current Position or Torque
2 TV output Motor Temperature
3 QV output Compartment Temperature
No single Device Variable may be mapped to more than one Dynamic Variable.
For Example:
Valid Mapping: Invalid Mapping:
PV = DV0 PV = DV0
SV = DV1 SV = DV1
TV = DV3 TV = DV1
QV = DV4 QV = DV4
Dynamic
Variable
Direction Default Device Variable
Device Variables which may be mapped to the
Dynamic Variable
Current Position, Torque, Motor Temperature or
Compartment temperature
Current Position, Torque, Motor Temperature or
Compartment temperature
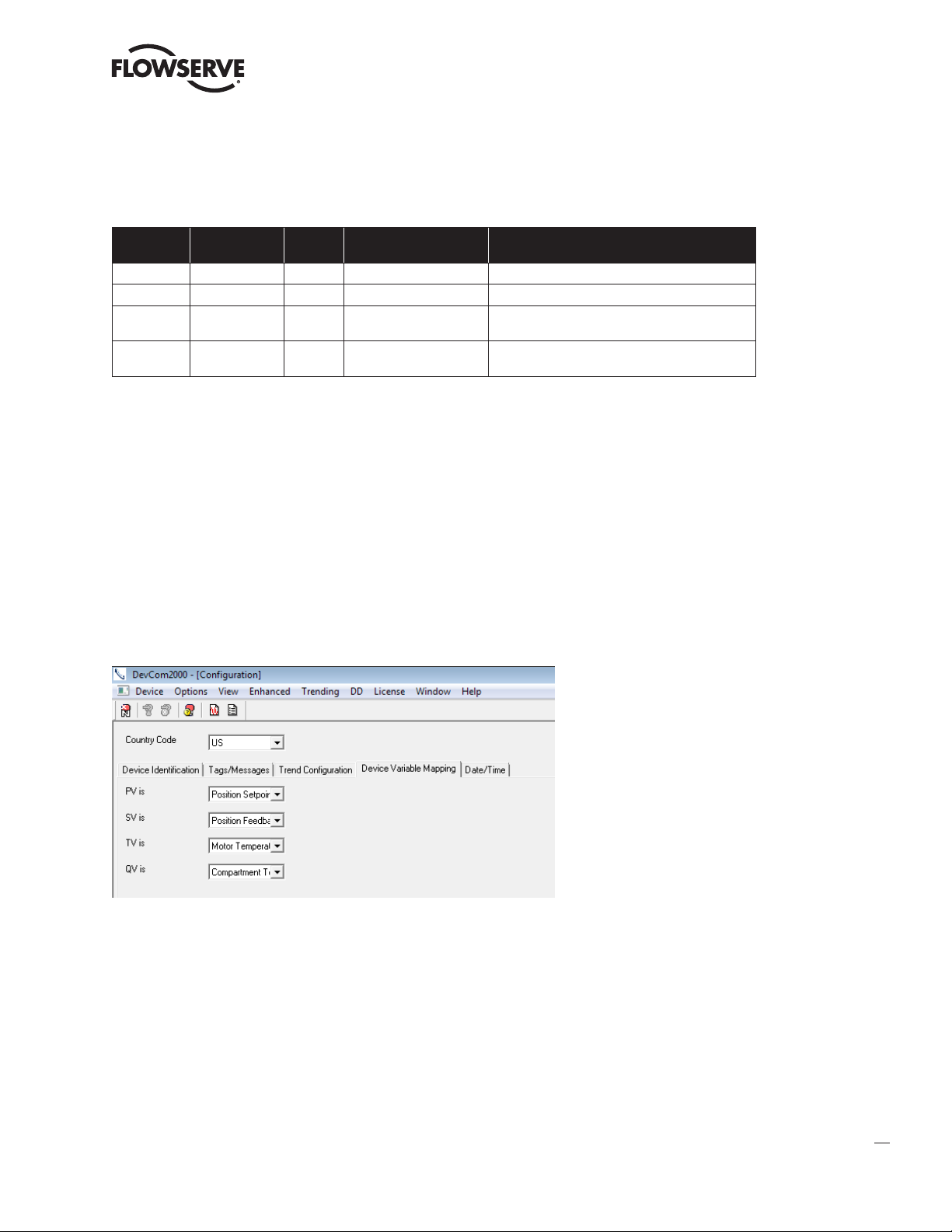
If you try to map two Dynamic Variables to the same Device Variable, the command will return response code 2 “invalid
selection”. The Device Variables may be mapped from the DD menu Device Setup->Wired HART Board->Configuration->
Device Variable Mapping as follows:
Figure 3.1 – Device Variable Mapping Setup
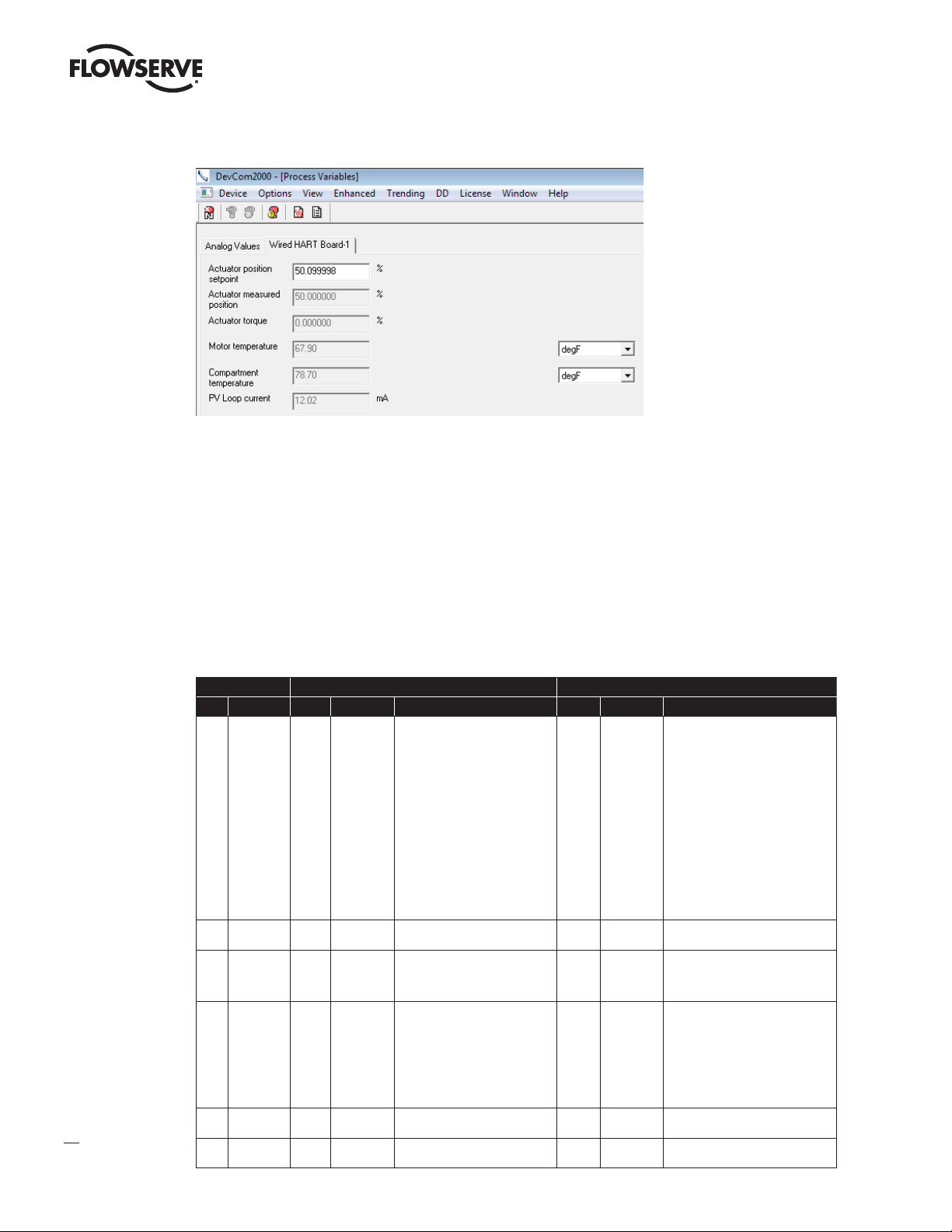
3.4.3 Device Variable Units
Device Variables 0, 1, and 2 have fixed units that may not be changed. Device Variables 3 and 4 have units that may be
interchanged between °C and °F the default is °F. For Device Variables 3 and 4, the units may be changed from the DD menu
Process Variables->Wired HART Board as follows:
flowserve.com
21
Page 22
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Figure 3.2 – Device Variable Units
3.5 Supported HART Commands
The following Universal and Common HART commands are supported by the Limitorque MX/QX HART device. See
Appendix B for more information on HART data formats such as: Packed, Latin-1, Date and Time. See Appendix C for
more information on “Enum” or “Bits” formats. See Appendix E for more information on valid Response Codes for each
command.
22
3.5.1 Universal Commands
Table 3.7 – HART Universal Commands
Command Request Data Bytes Response Data Bytes
No. Description Byte Format Description Byte Format Description
0 Read Unique
Identifier
1 Read Primary
Variable
2 Read Loop
Current And
Percent Of
Range
3 Read Dynamic
Variables And
Loop Current
6 Write Polling
Address
7 Read Loop
Configuration
0
Unsigned-8
1
Enum
Polling Address of Device
Loop Current Mode
0
1-2
3
4
5
6
7
7
8
9-11
12
13
14-15
16
17-18
19-20
21
0
1-4
0-3
4-7
0-3
4
5-8
9
10-13
14
15-18
19
20-23
0
1
0
1
Unsigned-8
Enum
Unsigned-8
Unsigned-8
Unsigned-8
Unsigned-8
Unsigned-5
Enum
Bits
Unsigned-24
Unsigned-8
Unsigned-8
Unsigned-16
Bits
Enum
Enum
Enum
Enum
Float
Float
Float
Float
Enum
Float
Enum
Float
Enum
Float
Enum
Float
Unsigned-8
Enum
Unsigned-8
Enum
254”
Expanded Device Type = 0x3008
Min. number of request preambles = 5
HART Protocol Major Rev. = 7
Device Rev. Level
Software Rev. Level
(5 MSB) Hardware Rev. Level
(3 LSB) Physical Signaling Code=0
Device Flag Assignment = 1
Device ID (unique for given device type)
Min. number of response preambles=5
Max. number of device variables = 5
Configuration Change Counter
Extended Field Device Status: 0=OK,
1=Maintenance req’d, 2=Device Alert
Manufacturer Identification Code = 0x0030
Private Label Distributor Code = 0x0030
Device Profile = 1
Primary Variable Units = 57 (%)
Primary Variable
Primary Variable Loop Current (mA)
Primary Variable % Of Range
Primary Variable Loop Current (mA)
Primary Variable Unit Code
Primary Variable
Secondary Variable Unit Code
Secondary Variable
Tertiary Variable Units Code
Tertiary Variable
Quaternary Variable Unit Code
Quaternary Variable
Polling Address of Device (0-63)
Loop Current Mode
Polling Address of Device (0-63)
Loop Current Mode
Page 23

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Command Request Data Bytes Response Data Bytes
No. Description Byte Format Description Byte Format Description
8 Read Dynamic
Variable Class
9 Read Device
Variables with
Status
11 Read Unique
Identifier
Associated
With Tag
12 Read Message 0-23 Packed Message
13 Read Tag,
Descriptor,
Date
14 Read Primary
Variable
Transducer
Information
15 Read Device
Information
Read Dynamic
Variable Class
0
Unsigned-8
1
Unsigned-8
2
Unsigned-8
3
Unsigned-8
4
Unsigned-8
5
Unsigned-8
6
Unsigned-8
7
Unsigned-8
0-5 Packed Tag 0
Slot 0: Device Variable Code
Slot 1: Device Variable Code
Slot 2: Device Variable Code
Slot 3: Device Variable Code
Slot 4: Device Variable Code
Slot 5: Device Variable Code
Slot 6: Device Variable Code
Slot 7: Device Variable Code
0
1
2
3
0
1
2
3
4-7
8
9
10
11
12-15
16
17
18
19
20-23
24
25
26
27
28-31
32
33
34
35
36-39
40
41
42
43
44-47
48
49
50
51
52-55
56
57
58
59
60-63
64
65-68
1-2
3
4
5
6
7
7
8
9-11
12
13
14-15
16
17-18
19-20
21
0-5
6-17
18-20
0-2
3
4-7
8-11
12-15
0
1
2
3-6
7-10
11-14
15
16
17
Enum
Enum
Enum
Enum
Bits
Unsigned-8
Enum
Enum
Float
Bits
Unsigned-8
Enum
Enum
Float
Bits
Unsigned-8
Enum
Enum
Float
Bits
Unsigned-8
Enum
Enum
Float
Bits
Unsigned-8
Enum
Enum
Float
Bits
Unsigned-8
Enum
Enum
Float
Bits
Unsigned-8
Enum
Enum
Float
Bits
Unsigned-8
Enum
Enum
Float
Bits
Time
Unsigned-8
Enum
Unsigned-8
Unsigned-8
Unsigned-8
Unsigned-8
Unsigned-5
Enum
Bits
Unsigned-24
Unsigned-8
Unsigned-8
Unsigned-16
Bits
Enum
Enum
Enum
Packed
Packed
Date
Unsigned-24
Enum
Float
Float
Float
Enum
Enum
Enum
Float
Float
Float
Enum
Enum
Bits
Primary Variable Class
Secondary Variable Class
Tertiary Variable Class
Quaternary Variable Class
Extended Field Device Status: 0=OK,
1=Maintenance req’d, 2=Device Alert
Slot 0: Device Variable Code
Slot 0: Device Variable Classification
Slot 0: Units Code
Slot 0: Device Variable Value
Slot 0: Device Variable Status
Slot 1: Device Variable Code
Slot 1: Device Variable Classification
Slot 1: Units Code
Slot 1: Device Variable Value
Slot 1: Device Variable Status
Slot 2: Device Variable Code
Slot 2: Device Variable Classification
Slot 2: Units Code
Slot 2: Device Variable Value
Slot 2: Device Variable Status
Slot 3: Device Variable Code
Slot 3: Device Variable Classification
Slot 3: Units Code
Slot 3: Device Variable Value
Slot 3: Device Variable Status
Slot 4: Device Variable Code
Slot 4: Device Variable Classification
Slot 4: Units Code
Slot 4: Device Variable Value
Slot 4: Device Variable Status
Slot 5: Device Variable Code
Slot 5: Device Variable Classification
Slot 5: Units Code
Slot 5: Device Variable Value
Slot 5: Device Variable Status
Slot 6: Device Variable Code
Slot 6: Device Variable Classification
Slot 6: Units Code
Slot 6: Device Variable Value
Slot 6: Device Variable Status
Slot 7: Device Variable Code
Slot 7: Device Variable Classification
Slot 7: Units Code
Slot 7: Device Variable Value
Slot 7: Device Variable Status
Slot 7 data time stamp
“254”
Expanded Device Type = 0x3008
Min. number of request preambles = 5
HART Protocol Major Rev. = 7
Device Rev. Level
Software Rev. Level
(5 MSB) Hardware Rev. Level
(3 LSB) Physical Signaling Code=0
Device Flag Assignment = 0
Device ID (unique for given device type)
Min. number of response preambles=5
Max. number of device variables = 5
Configuration Change Counter
Extended Field Device Status: 0=OK,
1=Maintenance req’d, 2=Device Alert
Manufacturer Identification Code = 0x0030
Private Label Distributor Code = 0x0030
Device Profile = 1
Tag
Descriptor
Date Code
Transducer Serial Number
Transducer Limits and Minimum Span Units
Code = 57 (%)
Upper Transducer Limit
Lower Transducer Limit
Minimum Span
PV Alarm Selection Code = 250 (not used)
PV Transfer Function Code = 0 (Linear)
PV Upper and Lower Range Values Units
Code
PV Upper Range Value
PV Lower Range Value
PV Damping Value (seconds)
Write Protect Code = 251 (none)
Reserved = 250 (not used)
PV Analog Channel Flags = 0x01
23
flowserve.com
Page 24

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Command Request Data Bytes Response Data Bytes
No. Description Byte Format Description Byte Format Description
16 Read Final
Assembly
Number
17 Write Message 0-5
18 Write Tag,
Descriptor,
Date
19 Write Final
Assembly
Number
20 Read Long Tag 0-31 Latin-1 Long Tag
21 Read Unique
Identifier
Associated
With Long Tag
22 Write Long Tag 0-31 Latin-1 Long Tag 0-31 Latin-1 Long Tag
38 Reset
Configuration
Changed Flag
48 Read
Additional
Device Status
Packed
6-17
Packed
18-20
Date
0-5
Packed
6-17
Packed
18-20
Date
0-2 Usigned-24 Final Assembly Number 0-2 Usigned-24 Final Assembly Number
0-31 Latin-1 Long Tag 0
0-1 Usigned-16 Configuration Changed Counter
0-5
Bits
6
Bits
7
Bits
8
Bits
9
Bits
10
Bits
11
Bits
12
Bits
13
Bits
4
14-21
Bits
Tag
Descriptor used by the master for record
keeping
A date code used by the master for record
keeping (E.G. Last or Next Calibration Date)
Tag
Descriptor used by the master for record
keeping
A date code used by the master for record
keeping (E.G. Last or Next Calibration Date)
3
Device-Specific Status 0
Extended Device Status
Device Operating Mode
Standardized Status 0
Standardized Status 1
Analog Channel Saturated
Standardized Status 2
Standardizes Status 3
Analog Channel Fixed
Device-Specific Status 1
0-2 Unsigned-24 Final Assembly Number
0-23 Packed Message String
0-5
Packed
6-17
Packed
18-20
Date
Unsigned-8
1-2
Enum
3
Unsigned-8
4
Unsigned-8
5
Unsigned-8
6
Unsigned-8
7
Unsigned-5
7
Enum
8
Bits
9-11
Unsigned-24
12
Unsigned-8
13
Unsigned-8
14-15
Unsigned-16
16
Bits
17-18
Enum
19-20
Enum
21
Enum
0-1 Usigned-16 Configuration Changed Counter
0-5
Bits
6
Bits
7
Bits
8
Bits
9
Bits
10
Bits
11
Bits
12
Bits
13
Bits
14-21
Bits
Tag
Descriptor
Date Code
“254”
Expanded Device Type = 0x3008
Min. number of request preambles = 5
HART Protocol Major Rev. = 7
Device Rev. Level
Software Rev. Level
(5 MSB) Hardware Rev. Level
(3 LSB) Physical Signaling Code=0
Device Flag Assignment = 0
Device ID (unique for given device type)
Min. number of response preambles=5
Max. number of device variables = 5
Configuration Change Counter
Extended Field Device Status: 0=OK,
1=Maintenance req’d, 2=Device Alert
Manufacturer Identification Code = 0x0030
Private Label Distributor Code = 0x0030
Device Profile = 1
Device-Specific Status 0
Hardware Faults bytes 0-3
Main Board Status bytes 4-5
Extended Device Status
Device Operating Mode
Standardized Status 0
Standardized Status 1
Analog Channel Saturated
Standardized Status 2
Standardizes Status 3
Analog Channel Fixed
Device-Specific Status 1
Hardware Warnings bytes 14-17
Device Status bytes 18-21
Not Used bytes 22-24)
3
4
24
3.5.1.1 Command 48 Data
The “More Status Available” bit in Device Status will be set if any bit in the following command 48 data is set, which
previously was not set:
• DeviceSpecificStatus_0 (bytes 0-3 only – hardware faults)
• ExtendedDeviceStatus
• StandardizedStatus
• AnalogChannelSaturated
• AnalogChannelFixed
• DeviceSpecificStatus_1 (bytes 14-17 – hardware warnings)
NOTE: DeviceSpecificStatus_0, bytes 4-5 (main board status information) is provided only for additional
information but these bits will not trigger More Status Available, as these are not considered faults or warnings.
DeviceSpecificStatus_1, bytes 18-21 (device status information) is provided only for additional information but these
bits will not trigger More Status Available, as these are not considered faults or warnings.
3. Upon receiving this command the device shall compare the counter value received in this command with the device’s current value. If they do not match then the device
will return Response Code 9 “configuration change counter mismatch” and not reset the configuration change counter.
4. HART specification allows up to 25 bytes for this command. However, it also states that “the response data bytes returned are truncated after the last status byte
supported by the Field Device”. Therefore we only return 22 bytes of data in our response. If the master sends a request with more than 22 bytes of data, our device will
still respond, but the extra bytes beyond those supported will be ignored
Page 25

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Command 48 can also be used to clear the “More Status Available”. When the device receives command 48 it
compares the Request Data Bytes to the current value; if there is an exact match it clears the “More Status Available
bit corresponding to the requesting device (Primary Master, Secondary Master, Gateway, etc.). If there is not an exact
match or too few bytes are received then the More Status Available bit remains unchanged. Extra Bytes beyond those
supported by the device are ignored.
Table 3.8 HART Defined Status Bits
Extended Device Status (Common Table 17) Supported
Bit Description
0 Maintenance Required Yes
1 Device Variable Alert No
2 Critical Power Failure No
3 Failure No
4 Out of Specification No
5 Function Check No
6 -
7 -
Standardized Status 0 (Common Table 29) Supported
Bit Description
0 Device Variable Simulation Active No
1 Non-Volatile Memory Defect Yes
2 Volatile Memory Defect No
3 Watchdog Reset Executed Yes
4 Power Supply Conditions Out of Range No
5 Environmental Conditions Out of Range No
6 Electronic Defect No
7 Device Configuration Locked Yes
Analog Channel Saturated (Common Table 27) Supported
Bit Description
0 Analog Channel 1 Yes
1 Analog Channel 2 No
2 Analog Channel 3 No
3 Analog Channel 4 No
4 5 6 -
7 -
Analog Channel Fixed (Common Table 28) Supported
Bit Description
0 Analog Channel 1 Yes
1 Analog Channel 2 No
2 Analog Channel 3 No
3 Analog Channel 4 No
4 5 6 7 -
25
flowserve.com
Page 26

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Table 3.9 MX/QX Defined Status Bits
Device-Specific Status 0 – CMD 48 Bytes 0-3 : Hardware Faults
Bit Description
Hardware Faults – these bits will trigger More Status Available bit
0 Main board to HART board communication loss
1 Reserved
2 Valve Jam
3 Over Torque in Close direction
4 Over Torque in Open direction
5 Phase Lost
6 Motor Temperature
7 Encoder Fault
8 Main board RAM error
9 Main board FLASH error
10 Main board EEPROM error
11 Reserved
12 Knob Failure
13 Limigard Fault
14 Contactor Fault
15 Power Board
16 Digital Out Board 1 (R1-R4 & RM) board fault
17 Digital Out Board 2 (R5-R8) board fault
18 Reserved
19 Analog Board 2 Fault
20 Reserved
21 Reserved
22 Motor Controller Fault
23 Reserved
24 Oil Over Temperature (arctic units)
25 Close Torque Timer Expired
26 Open Torque Timer Expired
27 HART Board 1 Fault
28 Reserved
29 HART Board 1 memory fault
30 Reserved
31 Future
26
Device-Specific Status 0 – CMD 48 Bytes 4-5 : Main Board Status
Main Board Status – these bits will not trigger More Status Available bit
0 Main board Self-test Ongoing (1=ongoing, 0=finished)
1 Main board Self-test Ok (1=succeeded, 0=failed; only valid if “Self-test ongoing = 0”
2 Future
3 Future
4 Future
5 Future
6 Future
7 Future
8 Future
9 Future
10 Future
11 Future
12 Future
Page 27

13 Future
14 Future
15 Future
Device-Specific Status 1 – CMD 48 Bytes 14-17 : Hardware Warnings
Bit Description
Hardware Warnings – these bits will trigger More Status Available bit
0 Phase Sequence Reversed
1 Encoder Warning
2 Motor Temperature Warning
3 Analog Input 1 Lost (main board mA input)
4 Analog Input 2 lost (Hart board 1 mA input)
5 Reserved
6 Maintenance Required
7 Modulating Position Control (MPC) Halted
8 Future
9 Future
10 Future
11 Future
12 Future
13 Future
14 Future
15 Future
16 Future
17 Future
18 Future
19 Future
20 Future
21 Future
22 Future
23 Future
24 Future
25 Future
26 Future
27 Future
28 Future
29 Future
30 Future
31 Future
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Device-Specific Status 1 – CMD 48 Bytes 18-21 : Device Status
Bit Description
Device Status – these bits will not trigger More Status Available bit
0 Valve Fully Open
1 Valve Fully Closed
2 Stopped in Mid-Travel
3 Opening Remotely
4 Closing Remotely
5 Local Knob in REMOTE
6 Local Knob in LOCAL
7 Local Knob in STOP
8 Opening in Local mode
9 Closing in Local mode
27
flowserve.com
Page 28

10 Open Inhibit Active
11 Close Inhibit Active
12 ESD Conflict
13 Inhibit Conflict
14 CSE is in Local/Stop
15 Network ESD Active
16 Local ESD Active
17 Valve Manually Moved
18 Open Torque Switch
19 Open Limit Switch
20 Close Torque Switch
21 Close Limit Switch
22 Reserved
23 In Remote Configuration Mode
24 Future
25 Future
26 Future
27 Future
28 Future
29 Future
30 Future
31 Future
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
The command 48 diagnostic data can be viewed from the DD menu Diagnostics->Information->Device Status as
follows:
28
Page 29

Figure 3.3 – HART Diagnostics Data
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
3.5.2 Common Commands
Table 3.10 Common Commands
Command Request Data Bytes Response Data Bytes
No. Description Byte Format Description Byte Format Description
33 Read Device
Variables
35 Write Primary
Variable Range
Values
36 Set Primary
Variable Upper
Range Value
37 Set Primary
Variable Lower
Range Value
40 Enter/Exit Fixed
Current Mode
41 Perform Self
8
Test
42 Perform Device
9
Reset
45 Trim Loop
Current Zero
0
Unsigned-8
1
Unsigned-8
2
Unsigned-8
3
Unsigned-8
0
Unsigned-8
5
1-4
Float
5-8
Float
6
7
0-3 Float Fixed Current Level (units of milliamperes) 0-3 Float Fixed Current Level (units of milliamperes)
0-3 Float Externally Measured Loop Current Level
10
Slot 0: Device Variable Code
Slot 1: Device Variable Code
Slot 2: Device Variable Code
Slot 4: Device Variable Code
Upper and Lower Range Values Units Code
Upper Range Value
Lower Range Value
(units of milliamperes)
0
Unsigned-8
1
Enum
2-5
Float
6
Unsigned-8
7
Enum
8-11
Float
12
Unsigned-8
13
Enum
14-17
Float
18
Unsigned-8
19
Enum
20-23
Float
0-3
Float
4-7
Float
0-3 Float Actual Measured Loop Current Level (units of
Slot 0: Device Variable Code
Slot 0: Units Code
Slot 0: Device Variable Value
Slot 1: Device Variable Code
Slot 1: Units Code
Slot 1: Device Variable Value
Slot 2: Device Variable Code
Slot 2: Units Code
Slot 2: Device Variable Value
Slot 3: Device Variable Code
Slot 3: Units Code
Slot 3: Device Variable Value
Primary Variable Loop Current (mA)
Primary Variable % Of Range
milliamperes)
29
11
flowserve.com
Page 30

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Command Request Data Bytes Response Data Bytes
No. Description Byte Format Description Byte Format Description
46 Trim Loop
Current Gain
49 Write Primary
Variable
Transducer
Serial Number
50 Read Dynamic
Variable
Assignments
51 Write Dynamic
Variable
Assignments
53 Write Device
Variable Units
54 Read Device
Variable
Information
56 Write Device
Variable
Transducer
Serial No.
59 Write Number
of Response
Preambles
60 Read Analog
Channel and
Percent of
Range
63 Read Analog
Channel
Information
65 Write Analog
Channel Range
Values
0-3 Float Externally Measured Loop Current Level
12
(units of milliamperes)
0-3 Float Actual Measured Loop Current Level (units of
milliamperes)
0-2 Unsigned-24 Primary Variable Transducer Serial Number 0-2 Unsigned-24 Primary Variable Transducer Serial Number
14
0
15
0
Unsigned-8
1
Unsigned-8
2
Unsigned-8
3
Unsigned-8
0
16
Unsigned-8
1
Enum
Device Variable Assigned to the Primary Variable
Device Variable Assigned to the Secondary Variable
Device Variable Assigned to the Tertiary Variable
Device Variable Assigned to the Quaternary
Variable
Device Variable Code
Device Variable Units Code
0 Unsigned-8 Device Variable Code 0
0
Unsigned-8
1-3
Unsigned-24
Device Variable Code
Device Variable Transducer Serial Number01-3
1
2
3
0
1
2
3
0
1
1-3
4
5-8
9-12
13-16
17-20
21
22
23-26
Unsigned-8
Unsigned-8
Unsigned-8
Unsigned-8
Unsigned-8
Unsigned-8
Unsigned-8
Unsigned-8
Unsigned-8
Enum
Unsigned-8
Unsigned-24
Enum
Float
Float
Float
Float
Enum
Enum
Time
Unsigned-8
Unsigned-24
Device Variable Assigned to the Primary Variable
Device Variable Assigned to the Secondary Variable
Device Variable Assigned to the Tertiary Variable
Device Variable Assigned to the Quaternary Variable
Device Variable Assigned to the Primary Variable
Device Variable Assigned to the Secondary Variable
Device Variable Assigned to the Tertiary Variable
Device Variable Assigned to the Quaternary Variable
Device Variable Code
Device Variable Units Cod
Device Variable Code
Device Variable Transducer Serial Number
Device Variable Limits/Minimum Span Units
Code
Device Variable Upper Transducer Limit
Device Variable Lower Transducer Limit
Device Variable Damping Value
Device Variable Minimum Span
Device Variable Classification
Device Variable Family
Update Time Period
Device Variable Code
Device Variable Transducer Serial Number
0 Unsigned-8 Number of preambles 0 Unsigned-8 Number of preambles
18
0 Unsigned-8 Analog Channel Number Code 0
0 Unsigned-8 Analog Channel Number Code 0
0
Unsigned-8
1
21
Enum
2-5
Float
6-9
Float
Analog Channel Number Code
Analog Channel Upper/ Lower Range Values
Units Code
Analog Channel Upper Range Value
Analog Channel Lower Range Value
1
2-5
6-9
1
2
3
4-7
8-11
12-15
16
0
1
2-5
6-9
Unsigned-8
Enum
Float
Float
Unsigned-8
Enum
Enum
Enum
Float
Float
Float
Bits
Unsigned-8
Enum
Float
Float
Analog Channel Number Code
Analog Channel Units Code = 39 (mA)
Analog Channel Level
Analog Channel Percent of Range
Analog Channel Number Code
Analog Channel Alarm Selection Code = 250
(not used)
Analog Channel Transfer Function Code = 0
(linear)
Analog Channel Upper/Lower Range Values Units
Code = 57 (%)
Analog Channel Upper Range Value
Analog Channel Lower Range Value
Analog Channel Damping Value (seconds)
Analog Channel Flags
Analog Channel Number Code
Analog Channel Upper/ Lower Range Values
Units Code = 57 (%)
Analog Channel Upper Range Value
Analog Channel Lower Range Value
13
17
19
20
30
66 Enter/Exit Fixed
Analog Channel
Mode
67 Trim Analog
Channel Zero01
68 Trim Analog
Channel Gain01
0
Unsigned-8
1
Enum
2-5
Float
Unsigned-8
Enum
2-5
Float
Unsigned-8
Enum
2-5
Float
Analog Channel Number Code
Analog Channel Units Code
Fixed Analog Channel Level22
Analog Channel Number Code
Analog Channel Units Code
Externally Measured Analog Channel Level
Analog Channel Number Code
Analog Channel Units Code
Externally Measured Analog Channel Level
0
Unsigned-8
1
Enum
2-5
Float
0
Unsigned-8
1
Enum
2-5
Float
0
Unsigned-8
1
Enum
2-5
Float
Analog Channel Number Code
Analog Channel Units Code = 39 (mA)
Fixed Analog Channel Level
Analog Channel Number Code
Analog Channel Units Code = 39 (mA)
Fixed Analog Channel Level
Analog Channel Number Code
Analog Channel Units Code = 39 (mA)
Fixed Analog Channel Level
71 Lock Device 0 Enum Lock Code 0 Enum Lock Code
76 Read Lock
Device State
0 Enum Lock Status
23
23
23
Page 31

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Command Request Data Bytes Response Data Bytes
No. Description Byte Format Description Byte Format Description
78 Read
Aggregated
Commands
79 Write Device
Variable
89 Set Real Time
25
Clock
90 Read Real Time
28
Clock
0
Unsigned-8
24
1-2
Unsigned-16
3
Unsigned-8
4-i
Unsigned-8[]
……..
Unsigned-16
……..
Unsigned-8
……..
Unsigned-8[]
……..
Unsigned-16
……..
Unsigned-8
……..
Unsigned-8[]
0
Unsigned-8
1
Enum
2
Enum
3-6
Float
7
Bits
0
Unsigned-8
1-3
Date
4-7
Time
8-9
Unsigned-16
Number of commands requested
Cmd A
Byte count for Cmd A
Data bytes for Cmd A
Cmd B
Byte count for Cmd B
Data bytes for Cmd B
……
Cmd N
Byte count for Cmd N
Data bytes for Cmd N
Device Variable Code
Write Device Variable Command Code
Units Code
Device Variable Value
Device Variable Status
26
Time set code
Date Code
Time of Day
0x000027
0
1
2-3
4
5-A
……..
……..
……..
……..
……..
……..
……..
……..
0
1
2
3-6
7
0
1-3
4-7
0-2
3-6
7-9
10-13
14
Bits
Unsigned-8
Unsigned-16
Unsigned-8
Unsigned-8[]
Unsigned-8
Unsigned-16
Unsigned-8
Unsigned-8[]
Unsigned-8
Unsigned-16
Unsigned-8
Unsigned-8[]
Unsigned-8
Enum
Enum
Float
Bits
Unsigned-8
Date
Time
Date
Time
Date
Time
Bits
Extended Field Device Status: 0=OK,
1=Maintenance req’d, 2=Device Alert
Number of Commands Requested
Cmd A
Byte count for Cmd A
Data bytes for Cmd A (including commands
response code)
Cmd B
Byte count for Cmd B
Data bytes for Cmd B (including commands
response code)
……………………
Cmd N
Byte count for Cmd N
Data bytes for Cmd N (including commands
response code)
Device Variable Code
Write Device Variable Command Code
Units Code
Device Variable Value
Device Variable Status
Time set code
Date Code
Time of Day
Current Date
Current Time of Day
Date Clock last set
Time Clock last set
RTC Flags
91 Read Trend
Configuration
92 Write Trend
Configuration
0 Usigned-8 Trend Number 0
29
0
31
Unsigned-8
1
Enum
2
Unsigned-8
3-6
Time
Trend Number
Trend Control Code
Device Variable Code
Trend sample interval
30
93 Read Trend320 Usigned-8 Trend Number 0
Read Device
95
Communications
33
Statistics
103 Write Burst
Period
104 Write Burst
Trigger
0
34
34
Unsigned-8
1-4
Time
5-8
Time
0
Unsigned-8
1
Enum-8
2
Enum-8
3
Enum-8
4-7
Float
Burst Message
Update Period
Maximum Update Period
Burst Message
Burt Trigger Mode Selection Code
Device Variable Classification for Trigger Level
Units Code
Trigger Level
35
36
38
1
2
3
4-7
0
1
2
3-6
1
2
3
4-6
7-10
11-14
15-18
19
20-23
24
25-28
29
30-33
34
35-38
39
40-43
44
45-48
49
50-53
54
55-58
59
60-63
64
65-68
69
70-73
74
0-1
2-3
4-5
0
1-4
5-8
0
1
2
3
4-7
Unsigned-8
Unsigned-8
Enum
Unsigned-8
Time
Unsigned-8
Enum
Unsigned-8
Time
Unsigned-8
Unsigned-8
Enum
Enum
Date
Time
Time
Float
Bits
Float
Bits
Float
Bits
Float
Bits
Float
Bits
Float
Bits
Float
Bits
Float
Bits
Float
Bits
Float
Bits
Float
Bits
Float
Bits
Unsigned-16
Unsigned-16
Unsigned-16
Unsigned-8
Time
Time
Unsigned-8
Enum-8
Enum-8
Enum-8
Float
Trend Number
Total number of Trends supported
Trend Control Code
Device Variable Code
Trend sample interval
Trend Number
Trend Control Code
Device Variable Code
Trend sample interval
Trend Number
Device Variable Code
Device Variable Classification
Device Variable Unit Code
Date Stamp Of Trend Value 0
Time Stamp of Trend Value 0
Sample Interval
Trend Value 0 (newest value)
Trend Value 0 Status
Trend Value 1
Trend Value 1 Status
Trend Value 2
Trend Value 2 Status
Trend Value 3
Trend Value 3 Status
Trend Value 4
Trend Value 4 Status
Trend Value 5
Trend Value 5 Status
Trend Value 6
Trend Value 6 Status
Trend Value 7
Trend Value 7 Status
Trend Value 8
Trend Value 8 Status
Trend Value 9
Trend Value 9 Status
Trend Value 10
Trend Value 10 Status
Trend Value 11
Trend Value 11 Status
Count of STX messages received by this device
Count of ACK messages received by this device
Count of BACK messages received by this device.
Burst Message
Update Period37
Maximum Update Period
Burst Message
Burt Trigger Mode Selection Code
Device Variable Classification for Trigger Level
Units Code
Trigger Level
30
37
31
flowserve.com
Page 32

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Command Request Data Bytes Response Data Bytes
No. Description Byte Format Description Byte Format Description
105 Read Burst
Mode
Configuration
106 Flush Delayed
Responses
107 Write Burst
Device
Variables
108 Write Burst
Mode
Command
Number
109 Burst Mode
Control
115 Read Event
Notification
Summary
116 Write Event
Notification Bit
43
Mask
117 Write Event
Notification
Timing
118 Event
Notification
Control
119 Acknowledge
Event
Notification
0 Unsigned-8 Burst Message 0
34
34
0
Unsigned-8
1
34
Unsigned-8
2
Unsigned-8
3
Unsigned-8
4
Unsigned-8
5
Unsigned-8
6
Unsigned-8
7
Unsigned-8
8
Unsigned-8
0-12Unsigned-16
34
42
Unsigned-8
0
Unsigned-8
1
Unsigned-8
0 Unsigned-8 Event number = 0
43
0
Unsigned-8
1-27
Bits
0
Unsigned-8
1-4
5-8
9-12
0
1
0
1-4
5-6
7
8-32
Time
Time
Time
Unsigned-8
Unsigned-8
Unsigned-8
Time
Unsigned-16
Bits
Bits
43
43
43
Device Variable Code Slot 0
Device Variable Code Slot 1
Device Variable Code Slot 2
Device Variable Code Slot 2
Device Variable Code Slot 4
Device Variable Code Slot 5
Device Variable Code Slot 6
Device Variable Code Slot 7
Burst Message
Command Number of the response message
to be transmitted
Burst Message
Burst Mode Control Code
Burst Message
Event Number = 0
Event Mask
Event Number = 0
Event Notification Retry Time
Maximum Update Time
Event De-bounce Time
Event Number = 0
Event Notification Control Code
Event Number = 0
Time when first unacknowledged event was
triggered
Configuration Changed Counter
Device Status
Command 48 Data
41
44
44
47
44
44
44
Unsigned-8
1
Unsigned-8
2
Unsigned-8
3
Unsigned-8
4
Unsigned-8
5
Unsigned-8
6
Unsigned-8
7
Unsigned-8
8
Unsigned-8
9
Unsigned-8
10
Unsigned-8
11
Unsigned-8
12-13
Unsigned-16
14-17
Time
18-21
Time
22
Enum-8
23
Enum-8
24
Enum-8
25-28
Float
0
Unsigned-8
1
Unsigned-8
2
Unsigned-8
3
Unsigned-8
4
Unsigned-8
5
Unsigned-8
6
Unsigned-8
7
Unsigned-8
8
Unsigned-8
0-12Unsigned-16
Unsigned-8
0
Unsigned-8
1
Unsigned-8
0
Unsigned-8
1
Unsigned-8
2.7-2.4
Bits-4
2.3-2.0
3-6
Enum
7-10
Time
11-14
15-18
Time
19-44
Time
Time
Bits
0
Unsigned-8
1-27
Bits
0
Unsigned-8
1-4
48
5-8
9-12
0
1
0
1-4
5-6
7
8-32
Time
Time
Time
Unsigned-8
Unsigned-8
Unsigned-8
Time
Unsigned-16
Bits
Bits
Burst Mode Control Code
31 (0x1F) Command Number Extension Flag39
Device Variable Code Slot 040
Device Variable Code Slot 1
Device Variable Code Slot 2
Device Variable Code Slot 3
Device Variable Code Slot 4
Device Variable Code Slot 5
Device Variable Code Slot 6
Device Variable Code Slot 7
Burst Message
Maximum Number of Burst Messages
Extended Command Number
Update Time (1/32 of a millisecond)
Maximum Update Time (1/32 of a millisecond)
Burst Trigger Mode Code
Device Variable Classification for Trigger Value
Units Code
Trigger Value
Device Variable Code Slot 0
Device Variable Code Slot 1
Device Variable Code Slot 2
Device Variable Code Slot 2
Device Variable Code Slot 4
Device Variable Code Slot 5
Device Variable Code Slot 6
Device Variable Code Slot 7
Burst Message
Command Number of the response message to
be transmitted
Burst Message
Burst Mode Control Code
Burst Message
Event Number
Number of events supported
MS 4 Bits of Event Status
LS 4 Bits of Event Notification Control Code
Time when first unacknowledged event was
45
triggered
Event Notification Retry Time
Maximum Update Time
Event De-bounce Interval
Event Mask
Event Number = 0
Event Mask
Event Number = 0
Event Notification Retry Time
Maximum Update Time
Event De-bounce Time
Event Number = 0
Event Notification Control Code
Event Number = 0
Time when first unacknowledged event was
49
triggered
Configuration Changed Counter
Device Status
Command 48 Data
40
46
32
512 Read Country
Code
513 Write Country
Code
1-23Unsigned-8
Enum-8
Country Code
SI Units Only
50
1-23Unsigned-8
Enum-8
1-23Unsigned-8
Enum-8
Country Code50
SI Units Only
Country Code
SI Units Only
50
5. The Range Values allow the Loop Current to be converted to a percent for use by the actuator (e.g. to use as the actuator setpoint).
6. Issuing this command will write the current Primary Variable value to the Upper Range Value.
7. Issuing this command will write the current Primary Variable value to the Lower Range Value.
8. The Loop Current may not reflect the process while the Self test is executing. A master must not generate spurious error messages or disconnect form the Field Device
while the Self test is in progress.
9. This is equivalent to cycling the power off and then back on to the Field Device. Communication with the network will be temporarily lost. The device will not respond
to subsequent commands until the reset is complete. In addition the Loop Current may not reflect the process while the Device Reset is executing. A master must not
generate spurious error messages or disconnect from the Field Device while the Device Reset is in progress.
10. This trim is typically performed by adjusting the Loop Current to 4.00 milliamperes and sending the measured value to the Field Device. In response the Field Device trims
its calibration of the Loop Current to match the value received from the Master. Response Code 9 “Incorrect Loop Current Mode or Value” will be returned if the device is
not in the proper mode to allow the Loop Current to be calibrated or if the current is not set to exactly the minimum value.
Page 33

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
11. The value returned in the response data bytes reflects the rounded or truncated value actually used by the device for the Zero value.
12. This trim is typically performed by adjusting the Loop Current to 20.00 milliamperes and sending the measured value to the Field Device. In response the Field Device
trims its calibration of the Loop Current to match the value received from the Master. Response Code 9 “Incorrect Loop Current Mode or Value” will be returned if the
device is not in the proper mode to allow the Loop Current to be calibrated or if the current is not set to exactly the maximum value.
13. The value returned in the response data bytes reflects the rounded or truncated value actually used by the device for the Gain value.
14. Command 56 write device variable transducer serial number can also be used to write the PV transducer serial number if device variable code 0 (position setpoint) is
used.
15. See Section 3.4 Device Variables for more information on Device Variables and mapping. Note: the Device Variable Assignment is made by the Device Variable Code
(0-4).
16. Note: only Device Variables 3 and 4 may have their units code changed. See 3.4.3 Device Variable Units for more information. Response Code 11 “Invalid Device Variable
Code” will be returned if an invalid Device Variable Code is requested (Device Variable codes 0-4). Response Code 12 “Invalid Units Code” will be returned if the units
code is not valid for the given Device Variable Code.
17. The update time period indicates the maximum period between Device Variable updates.
18. This command sets the number of asynchronous 0xFF preamble bytes to be sent by a device before the start of a response message. This value may be set to no smaller
than 5 and no greater than 20.
19. There is one analog channel with analog channel number code of 0 which is linked to the Primary Variable.
20. Percent of Range always follows the Analog Level even if it is set to a value. The Upper and Lower Range Values maps the Analog Level to the percent of Range. As a
result the Percent of Range is not limited to values between 0% and 100%, but tracks the Analog Level to Transducer Limits when they are defined.
21 The Upper Range Value may be set lower than the Lower Range Value, enabling the device to be operated with a reversed signaling polarity.
22. A level containing NAN or “0x7F, 0xA0, 0x00, 0x00”, with any units code exits the fixed analog channel mode. The device will also exit fixed analog channel mode when
power is removed from the device or the device is reset.
23. The value returned in the response data bytes reflects the rounded or truncated value actually used by the device.
24. This command can be used to receive multiple read commands in one read for faster command reads.
25. Normally a host should send this command multiple times while measuring average latency. Each time the host will adjust the Time of Day value compensating for the
communication latency. This will be repeated until communication latency affects are characterized and its effect on setting the real time clock is minimized.
26. See Appendix D for additional details on how this command works dependent upon this code.
27. Should be set to 0, Two bytes to ensure request and response take equal amounts of time (compensates for transmission time of Response Code and Device Status in
response).
28. Reads the real time clock including the current time as estimated by the device and the last time the clock was set. The device must answer with the internal time at which
the request was received. If the clock has not been set then the last time set must be initialized to midnight (00:00) 01 January, 1900.
29. See section “3.2 HART Parameters” for maximum number of trends and trend buffer size.
30. Maximum is 2 hour; one trend per day i.e. 0x0DBBA000
31. When a change in configuration is detected (change of Trend Control Code, Device Variable or Update Interval), the device will clear the ring buffer and initialize all values
to NaN (0x7FA00000) and the status set to BAD-Fixed (0x30) before starting the trend.
32. When the trend is not enabled the device shall return the data last collected with the corresponding date and time. The Response Code shall be set to 8 – Trend not
Active.
33. The communications statistics are volatile and reset to zero only on power-up or board reset. All counts must wrap to zero on overflow.
34. Please see sections “3.5.3 Burst Messages” for configuration details of Burst Mode.
35. In 1/32 of a millisecond - Update period must not exceed 3600 seconds. The device must publish data at this rate as long as the trigger conditions in command 104 are
met.
36. In 1/32 of a millisecond – Maximum update period must not exceed 3600 seconds. The device must publish at this rate when the trigger conditions configured in
command 104 are not met.
37. The value returned in the response data bytes reflects the value actually used by the device. If the update time had to be adjusted by the device, the response will reflect
the adjusted value. See section “3.5.3 Burst Messages” for more information about update rates.
38. If command 2 “Read Loop Current and Percent of Range” is selected the Device Variable Classification must be 0 and the Engineering Units “Percent” (0x39 or
57 decimal).
39. Note: if there are no request data bytes then this byte must return the LS Byte of the burst command number.
40. If a slot is not configured to transmit a Device Variable that slot must return “250” not used. If command 9 is to be burst then the slot’s Device Variable Code must meet
the requirements found in command 9.
41. See section “3.5.3 Burst Messages” for a list of commands supported for Burst Messaging. Note: if the trigger mode is non-zero in command 104 (not Continuous) and
the trigger source’s Device Variable Classification does not match for the new command number the new command number will be accepted and Response Code 8 “Burst
Condition Conflict” will be returned. The HART device shall correct the classification, correct the unit codes, and reset the trigger mode to 0 (Continuous) and publish
continuously at the update period until it receives another command 104.
42. See section “3.5.3 Burst Messages” for more information on configuring Burst Messages. Note: This command affects Data Link Layer operation. All Data Link Layer
requirements for entering and exiting burst mode must be met.
43. See section “3.5.4 Event Notification” for more information about Event Notifications.
44. The MX/QX Hart device supports one Event Notification which is identified as Event Notification Number 0.
45. The value shall be set to 0xFFFFFFFF when no events are pending.
46. This is the concatenation of the mask for triggering on bits set in Device Status and Command 48 Response. The command can be truncated after the last byte in the
Event Mask.
47. The concatenation of the mask for triggering on bits set in Device Status and Command 48 Response. The request is truncated after the last byte containing a trigger-able
event. Bytes that are truncated assume a bit mask value of zero. Therefore, any byte not included shall not trigger an event notification. Furthermore, the truncated bytes
shall not be included in the notification generated using the command 119 response.
48. The return and update times must be selected as specified in section “3.5.4.3 Update Periods”. The retry period must be less than or equal to the maximum update
period.
49. Value will be set to -1 when no events are pending.
50. The two letter country code in accordance with ISO.
3.5.3 Burst Messages
In this mode, the Limitorque MX/QX field device will publish the response to a command continuously without any
further Master or Host action. All masters must arbitrate correctly when a burst-mode field device is present on the
loop.
33
flowserve.com
Page 34

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
There must be only one burst mode device active on the communication link at any given time. This is because the
Master must adapt its operation to ensure correct bus arbitration, because the token passing sequence is fundamentally
changed.
3.5.3.1 Update Periods
The host application or control system may set the update periods for the Limitorque MX/QX field device to the
following allowed values: 0.5, 1.0, 2.0, 4.0, 8.0, 16.0, 32.0, and 60-3600 seconds.
If a setting is requested that is different from those indicated above, the HART device must correct the setting and send
response code 8 “Update Times Adjusted” in its response message. The update time returned in the response message
will reflect the adjusted update time the device is using.
When enabling burst messaging, the device takes control of the Token Passing Layer bursting out the default burst
message with no less than “Link Grant Time” (approximately 75 ms) between bursts. This Link Grant Time allows
another master to take over the bus and transmit a message. If only one burst message is enabled, it is the default
burst message. If more than one burst message is enabled, the burst message with the shortest update period is the
default burst message.
On a Token Passing Data-Link burst, messages are used both to publish data and to pass the token. Therefore, the
default burst message will always burst with approximately 75 ms between bursts, regardless of what value is set for
the “Update Period” of the default burst message. If more than one burst message is enabled, the other (not default)
burst messages will be burst based on their Update and Max Update Periods.
3.5.3.2 Commands Supported for Burst Message
• Command 1 Read Primary Variable
• Command 2 Read Loop Current and Percent of Range
• Command 3 Read Dynamic Variables and Loop Current
• Command 9 Read Device Variables With Status
• Command 33 Read Device Variables
• Command 48 Read Additional Device Status
• Command 93 Read Trend
3.5.3.3 Configuring a Device for Burst Mode Operation
Burst messages can be configured from the DD menu Device Setup->Wired Hart Board->Configuration->Burst
Messages as follows:
34
Page 35

Figure 3.4 – Burst Messages
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
The burst mode configuration (number of messages active, trigger settings, etc.) will be retained across power cycles
and resets.
3.5.3.4 Burst Message Trigger Mode
Table 3.11 Trigger Source for Burst Message Commands
Command Trigger Source Value
1 PV
2 PV Percent of Range
3 PV
9 Device Variable in Slot 0
33 Device Variable in Slot 0
48 Device Variable in Slot 0
93 Device Variable in Slot 0
3.5.3.5 Burst Trigger Mode
In Window Mode the trigger value must be a positive number and is the symmetric window around the last
communicated value.
35
flowserve.com
Page 36

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Figure 3.5 – Trigger Mode 1 “Windowed”
Even if the value does not deviate beyond the window, a Burst Message will be published when the max update period
is exceeded.
In Rising Mode, the Burst Message is published when the source value exceeds the trigger value. Burst Messages are
published at the rate indicated by the update period, as long as the source value remains above the trigger value. If the
value falls below the trigger value, the update time will drop to the maximum update period.
In Falling Mode, the Burst Message is published when the source value drops below the trigger value. Burst Messages
are published at the rate indicated by the update period, as long as the source value remains below the trigger value. If
the value exceeds the trigger value, the update time will drop to the maximum update period.
In the On-Change Mode, the Burst Message is published when the value in the message changes. If the value does not
change, the Burst Message will be published at the maximum update period.
3.5.4 Event Notification
Event Notification requires Burst Mode operation; therefore, at least one burst message must be enabled for event
notification to occur. The HART protocol provides two distinct methods for displaying events:
• Field Device Status
• Command 48 response
Event Notification publishes changes in the device’s status, independently from other data published in other Burst
Messages. Bits from the Field Device Status and the command 48 response data may be selected using a bit mask to
send Event Notifications. This allows the Event Notification to be limited to specific bits.
The device shall retain Event Notification Settings through a device reset, self-test or power-cycle. However, Event
Notification and Time Stamps are not maintained through power cycles or a device reset. The MX/QX HART device
supports an event history queue of five events for the configured Event Notification. If more events are detected than
can be buffered, then the “Event Notification Overflow” bit in Standardized Status 1 (see section 3.5.1.1 Command 48
Data) shall be set until all pending events have been acknowledged. Events detected after the event queue is full are lost.
36
3.5.4.1 Configuring Event Notification
Event Notification can be configured from the DD menu Device Setup->Wired Hart Board->Configuration->
Event Notification as follows:
Page 37

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Figure 3.6 – Event Notification
The Event Mask allows the user to select those bits from Field Device Status and Command 48 data which they want
to trigger and event. When the user clicks the “Event Mask” button, the following menu will appear, allowing them to
select the event triggers:
Figure 3.7 – Event Mask
3.5.4.2 Handling of Event Notifications
The MX/QX HART device detects a change in the selected bit from high to low, and low to high. Therefore, any change
in a bit, either to set it or clear it, will generate an event. The first occurrence of the event (change in any of the selected/
masked bits) is latched and Time Stamped. The event notification shall be sent repeatedly with a period of ‘Event
Notification Retry Period’ until the event is Acknowledged by the Master. The Time Stamp shall remain the same until
an Acknowledge is received from the Host/Master. Once an Acknowledge is received, the Time Stamp shall be set to
37
flowserve.com
Page 38

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
the time when the Acknowledge was performed. If no event is latched the current Configuration Chagned Counter, Field
Device Status, and Command 48 response data shall be sent repeatedly with a period of ‘Maximum Update Period’.
The event message is aggregated with the default burst message. The event message is sent to both masters (in two
consecutive burst cycles, like any burst message. HCF_SPEC-151, 6.10.2).
The Event Notification De-bounce Interval is used to prevent spurious event notifications, and defines the amount of
time that a condition must persist before the Event Notification is sent out.
3.5.4.3 Update Periods
The host application or control system may set the update periods for the Limitorque MX/QX field device to the
following allowed values: 0.5, 1.0, 2.0, 4.0, 8.0, 16.0, 32.0, and 60-3600 seconds.
If a setting is requested that is different from those indicated above, the HART device must correct the setting and send
response code 8 “Update Times Adjusted” in its response message. The update time returned in the response message
will reflect the adjusted update time the device is using.
3.6 Device-Specific Commands
3.6.1 Remote Configuration Mode
Some device-specific commands require the unit be “In Remote” (Remote-Stop-Local Knob is in the Remote position)
and/or “Remote Configuration Mode”. If those commands are issued when the unit is not “In Remote” and/or “Remote
Configuration Mode”, response code 16 “Access Restricted” will be returned.
Remote Configuration Mode can be entered or exited using the button located at the bottom of the configuration menu.
For example, at the bottom of the ESD Settings configuration menu:
Figure 3.8 – Remote Configuration Modes (3 figures)
When the button is clicked, it will provide a new window that gives you the current status of Remote Configuration
Mode and asks if you wish to change it:
38
Page 39

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
The Remote Configuration Mode is used to ensure the unit is not moving during a change of configuration, as this can
be dangerous. If a move command is received while in Remote Configuration Mode, the unit will complete the last write
and exit Remote Configuration Mode and take the move action. The unit must first be placed in “remote configuration
mode” and remain in this mode while these write configuration commands occur to ensure proper operation of the unit.
It is intended that the “write” Device-Specific commands which write unit configuration be used only during commissioning of the unit, and not during normal process control.
If the unit is in “remote configuration mode” and any of the following occur, it will exit the “remote configuration mode”
upon completion of writing the configuration to EEPROM:
• Control knob is moved from REMOTE to LOCAL or STOP
• Network or discrete/local ESD become active
• A discrete open, close or stop command is received by the unit
• A network open, close or stop command is received by the unit
While the unit is in “remote configuration mode”, it will ignore the “position setpoint” value of the HART board and not
move the actuator, until the “remote configuration mode” is exited.
39
flowserve.com
Page 40

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
3.6.2 Partial Stroke Test
The actuator must be “in REMOTE” and not in “Remote Configuration Mode”. The Partial Stroke Test will not start if
the unit is not in the correct configuration or has any system faults. Once the Partial Stroke Test starts, the actuator
will display “PST ACTIVE” and move to the given target. Upon reaching the target, the actuator will return to the
starting position. If any system faults are encountered during the transition to target and back, the actuator will stop
at the position where the fault occurred, the PST ACTIVE display will be cleared, and the test results will indicate
failed. Command 48 (or Device-Specific command 149) can be used to obtain more details on what fault occurred.
The process should not be controlling the unit while the Partial Stroke Test is active (i.e., the loop current should be
constant and not changing).
The Partial Stroke Test may be initiated from the DD menu Diagnostics->Operation as follows:
Click the Partial Stroke Test button and the following warning will be displayed:
40
Click OK (with Yes) selected to continue.
Page 41

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Enter the target position you wish the actuator to move to (it will return to the start position after it reaches the target position). The current start position is displayed as “Actuator Measured Position”
The following will be displayed while the PST is in progress:
Once the test completes, the test results will be displayed. The following figure shows a passing test.
41
flowserve.com
Page 42

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
If the test failed, “Partial Stroke Test Failed” would be displayed and further information on the failure can be found by
reviewing the DD menu Diagnostics->Information->Device Status.
3.6.3 Actuator Commands
Some common network functions can be issued by using Actuator Commands from the DD menu Diagnostics->
Operation and clicking on the Actuator Command button as follows:
42
The Stop and Stop Release commands require the unit be in Remote; if not, in remote response code 16 “Access
Restricted” will be returned. The Stop command is used like a network stop and will halt the unit from reacting to the
PV value. The Stop Release command will remove the network stop and resume normal operation.
The Start Network ESD command will activate a Network ESD, and the unit shall take the action configured for Network
ESD and indicate NW ESD ACTIVE on the LCD. The Stop Network ESD command will deactivate the Network ESD and
resume normal operation.
Page 43

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
The Energize/De-Energize Relays command will allow the customer to set the state of the relays if and only if the relay
is configured for “Network Control”. When these commands are selected a new window will open, allowing the user to
select which relays to energize (those with a check in the check box will be energized, those with no check in the check
box will
be de-energized).
3.7 Calibration
3.7.1 Loop Current Trim Procedure
The Loop Current may be calibrated from the DD menu Device Setup->Wired HART Board->Calibration as follows:
Click on the Loop Current Analog Input button. You will receive a warning that changing the calibration may
cause the unit to move.
flowserve.com
43
Page 44

Click OK if it is OK to continue with calibration.
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
44
Page 45

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Set the Analog Input Loop Current to the low reference value (typically 4 mA, but can be set between 2-7 mA)
and then click OK.
Enter the measured value of the loop current in mA that was applied in the previous step.
flowserve.com
45
Page 46

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Set the Analog Input Loop Current to the high reference value (typically 20 mA, but can be set between 12-28 mA)
and then click OK.
46
Enter the measured value of the loop current in mA that was applied in the previous step.
A verification of the reference values that were set will be displayed. Click OK to complete the calibration.
Page 47

Calibration is complete; click OK to exit the method.
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
3.7.2 Re-range Procedure
The PV Upper and Lower Range values can be calibrated by clicking the Set PV Range Values button on the DD menu
Device Setup->Calibration. This calibration defines the relationship between the zero and gain Loop Current values and
the Primary Value.
Standard:
Set Upper Range value to 100%, and Lower Range Value to 0%
Zero = 4 mA -> lower range = 0% open; Gain = 20 mA -> upper range = 100% open
To reverse the polarity of the signal the user may set the Upper Range value lower than the Lower Range value.
Reversed:
Set Upper Range value to 0%, and Lower Range Value to 100%
Zero = 4 mA = lower range = 100% open, gain = 20 mA = Upper Range = 0% open
The signal may also be limited to a smaller range, for example:
Set the Upper Range value to 80%, and the Lower Range Value to 0%
Zero = 4 mA = lower range = 0% open, gain = 20 mA = Upper Range = 80% open
When the Set PV Range Values button is clicked, a warning is given that this may cause the actuator to move:
flowserve.com
47
Page 48

Click OK to continue with calibration of ranges.
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
48
The current Lower (LRV) and Upper (URV) ranges are shown. To change the range value, click on the item to be
changed; a new window will open, allowing the user to set both limits at the same time.
To change the lower range value, click on PV LRV item; a new window will open, allowing the user to enter the value.
Page 49

Enter the new LRV value and click on the Set button.
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
To change the upper range value, click on a PV URV item; a new window will open, allowing the user to enter the value.
flowserve.com
49
Page 50

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Enter the new URV value and click on the Set button.
3.7.3 Analog Signal to Primary Variable Process Flow
The following Figure 3.2 shows the process flow used to convert the analog input signal to a positions setpoint target
value for the PV.
1. The analog signal is read by the ADC and converted to a digital value
2. The digital value is assigned an equivalent mA value based on fixed internal values
3. The loop current value is now scaled between the zero and gain trim points
a. The gain trim value can be set from the DD menu Device Setup->Wired HART Board->Calibration
b. The zero trim value can be set from the DD menu Device Setup->Wired HART Board->Calibration
c. The loop current value can be set to a fixed value for simulation from the DD menu Process Variables->
Wired HART Board
4. The loop current is checked for saturation and the appropriate alarms are set or cleared
a. The Field Device Status bit “Loop Current Saturated” will be set/cleared
5. The Upper and Lower Transducer limits (fixed) are used to do a linear transformation to convert the loop current
to position setpoint value in percent open. (4 mA = 0% PV – Lower Transducer Limit, 20 mA = 100% PV – Upper
Transducer Limit)
a. The analog channel level and percent range can be read using command 60 with channel number 0 (which is
the loop current)
6. The Upper and Lower Range scaling set by the customer is applied to the Primary Variable. This may reverse the
signal polarity, or limit the range.
a. The Upper Range Value can be set from the DD menu Device Setup->Wired HART Board->Calibration
b. The Lower Range Value can be set from the DD menu Device Setup->Wired HART Board->Calibration
c. The PV can be forced to a fixed value for simulation from the DD menu Process Variables->Wired HART
Board; it is also used to write the PV value when in Multi-drop mode
7. The PV value is checked for Out-of-Limits and the appropriate alarms are set or cleared
a. The Field Device Status bit “Primary Variable Out of Limits” will be set/cleared
b. The PV value will be limited to the Upper or Lower Range value if it is detected to be out of limits
50
Page 51

8. The PV value is now ready to be used in the process
a. Command 1 can be used to read the primary variable
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
flowserve.com
51
Page 52

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Figure 3.9 – Analog Signal to Primary Variable Process Flow
52
Page 53

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
MX/QX FOUNDATION Fieldbus Field Unit FCD LMENIM2330-01 – 08/11
4
Associated
Documents
Associated Documents
4
Additional information can be found in the following documents:
MX Actuator
Quick Start-Up Instructions (MX Actuators) Limitorque Bulletin LMENIM2310
MX Installation and Operation Manual Limitorque Bulletin LMENIM2306
Protection, Control and Monitoring Features of MX
Electric Actuators
MX Maintenance and Spare Parts Manual Limitorque Bulletin LMENIM2314
Limitorque Bulletin LMENTB2300
QX Actuator
Quick Start-Up Instructions (QX Actuators) Limitorque Bulletin LMENIM3313
QX Installation and Operation Manual Limitorque Bulletin LMENIM3306
Protection, Control and Monitoring Features of QX
Electric Actuator
QX Maintenance and Spare Parts Manual Limitorque Bulletin LMENIM3314
5
Limitorque Bulletin LMENIM2300
How to Order Parts
flowserve.com
53
Page 54

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
MX/QX FOUNDATION Fieldbus Field Unit FCD LMENIM2330-01 – 08/11
5
How to Order Parts
To order parts or obtain further information about your Limitorque MX/QX HART field unit, contact your
local Limitorque distributor sales office, or:
FLOWSERVE CORPORATION
FLOW CONTROL DIVISION,
Limitorque Actuation Systems
5114 Woodall Road
P.O.Box 11318
Lynchburg, VA 24506-1318
Phone (434) 528-4400
Fax (434) 845-9736
To find the Limitorque distributor or sales office near you, go to http://www.limitorque.com
All inquiries or orders must be accompanied by the following information supplied on the actuator
nameplate:
1. Unit size
2. Order number
3. Serial number
54
Page 55

Appendix A – Wiring Diagrams
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
flowserve.com
55
Page 56

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
56
Appendix B – HART Data Formats
Type Format
Bits
Date
Each individual bit in the byte has a specific meaning. Only values specified by the command may be used. Bit 0
is the least significant bit.
The Date consists of three 8-bit binary unsigned integers representing, respectively, the day, month, and year
minus 1900. Date is transmitted day first followed by the month and year bytes.
Page 57

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Enum
Enum-8
Float
Latin-1 A string using the 8-bit ISO Latin-1 character set. Latin-1 strings are padded out with zeros (0x00).
Packed
Unsigned-nn
Time
An integer enumeration with each numeric value having a specific meaning. Only values specified in “Appendix
C – Enumeration and Bit Field Tables” are used.
An IEEE 754 single precision floating point number. The exponent is transmitted first followed by the most
significant mantissa byte.
A string consisting of 6-bit alpha-numeric characters that are a subset of the ASCII character set. This allows four
characters to be packed into three bytes. Packed ASCII strings are padded out with space (0x20) characters.
An unsigned integer where nn indicates the number of bits in this integer. Multi-byte integers are transmitted
MSB-LSB.
An unsigned 32-bit binary integer with the least significant bit of the time value representing 1/32 of a millisecond
(i.e. 0.03125 milliseconds). When time data types are used to represent time of day they indicate the number of
1/32 of milliseconds since midnight. Time can span in excess of 37 hours. When a longer span is required the
field device should use time in conjunction with a Date.
Appendix C – Enumeration and Bit Field Tables
Extended Field Device Status
Bit Mask Description
0x00 Status OK
0x01
0x02
0x04 Critical Power Failure: Not Used
0x08 Failure: Not Used
0x10 Out of Specification: Not Used
0x20 Function Check: Not Used
Maintenance Required: This bit is set to indicate that, while the device has not malfunctioned, the Field Device
requires maintenance.
Device Variable Alert: This bit is set if any Device Variable is in an Alarm or Warning State. The host should
identify the Device Variable(s) causing this to be set using the Device Variable Status Indicators.
Units Code:
Temperature
Unit Code Description
32 Degrees Celsius
33 Degrees Fahrenheit
39 Milliamperes
Miscellaneous
Unit Code Description
57 Percent
Loop Current Mode
Code Loop Current Mode Description
0 Signaling Disabled (Multi-drop)
1 Signaling Enabled (Point-to- Point)
Code Device Variable Classification
0 Device Variable Not Classified
64 Temperature
Code Device Variable Family
Variable Classification
57
Device Variable Family
flowserve.com
Page 58

6 Valve/Actuator
250 Not Used
Figure 5.1 – Device Variable Status Byte Format
Device Variable Status
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
58
Write Protect Code
Code Device Variable Classification
0 No – Not Write Protected
1 Yes – Write Protected
251 None (Write Protect Mode not supported)
Analog Channel Alarm Selection Code
Code Alarm
250 Not Used
Analog Channel Transfer Function Code
Code Transfer Function
0 Linear
250 Not Used
Analog Channel Flags
Flag Description
0x01 When set this analog channel is a Field Device analog input channel.
Lock Code
Code Lock Device Description
0 Unlocked
1 Lock – Temporary (i.e., Device Reset or Power Loss releases the lock). Only the locking Master can unlock.
2
Lock – Permanent (i.e., Device Reset or Power Loss does not affect the lock). Only the locking Master can
unlock.
Page 59

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
3
Bit Mask Lock Device Description
0x01 Device Locked. Must be set if any lock is asserted in the Field Device.
0x02 Lock is Permanent. Must be set if lock does not clear on Device Reset or Power Loss.
0x04 Locked by Primary Master (Reset if Secondary Master). Must be set if locked by the Primary Master or Gateway.
0x08 Configuration Locked and cannot be changed by any application. Must be set if “Lock All” code is received.
0x10 Locked by Gateway. Must be set (along with “Locked by Primary Master”) if locked by Gateway.
These codes indicate whether the Device Variable’s engineering value is forced to a fixed value or is in normal operation.
Code Transfer Function
0 Normal
1 Fixed
Flag Description
0x01
0x02
Lock All – No changes in the device’s configuration, by any master, are allowed. In addition, Device Reset or
Power Loss does not affect the lock. Any Master can unlock.
Lock Status
Device Variable Command Code
RTC Flags
Non-Volatile Clock. When set the device contains a battery-backed clock. In this case the clock does not need
to be reset if there is a power loss.
Clock Uninitialized. The real-time clock has never been set with the date and time. For example, the clock is
volatile and power was removed from and restored to the device.
Trend Control Code
Code Description
0 Disable
1 Enable Single Data Point Trending
2
3
Code Description
0 Continuous – The burst message is published continuously at (worst case) the minimum update period.
1 Window – The burst message is triggered when the source value deviates more than the specified trigger value.
2 Rising – The burst message is triggered when source value rises above the specified trigger value.
3 Falling – The burst message is triggered when the source value falls below the specified trigger value.
4 On-Change – The burst message is triggered when any value in the message changes.
Code Description
0 Off
1 Enable Burst on Token-Passing Data Link Layer Only
2 Enable Burst on TDMA Data-Link Layer Only
3 Enable Burst on TDMA and Token-Passing Data Link Layers
250 Reserved
251 Reserved
252 Reserved
Enable Filtered Trending – The sample is filtered using a time constant equal to one-third the trend sample
period.
Enable Average Trending – The value is obtained by dividing the sum of all samples in the period by the total
number of samples.
Burst Message Trigger Mode Selection Code
Burst Mode Control Code
59
flowserve.com
Page 60

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
253 Reserved
Event Status
Flag Description
0x01 Configuration Changed Event Pending
0x02 Device Status Event Pending
0x04 More Status Available Event Pending
Event Notification Control Code
Code Description
0 Off
1 Enable Event Notification on Token-Passing Data Link Layer Only
2 Enable Event Notification on TDMA Data-Link Layer Only
3 Enable Event Notification on TDMA and Token-Passing Data Link Layers
SI Units Control Code
Code Description
0 No restrictions (default)
1 Unit codes limited to the SI Units only
60
Appendix D – Setting Data and Time
Normally a host should send command 89 Set Real Time Clock multiple times while measuring
average latency. This will be repeated until communication latency affect are characterized and its
effect on setting the Real-Time clock is minimized.
The time and date can be set from the DD menu Device Setup->Wired HART Board->
Configuration->Data/Time as follows:
Page 61

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
The MXa/QX HART Device does not support a Non-Volatile Clock, therefore, if power is lost or the
unit resets, the date and time are lost and must be reset.
Appendix E – Command Response Codes
NOTE: DR is Delayed Response
Command Response Code
No. Description Code Class Description
Universal Commands
0 Read Unique Identifier 0
1 Read Primary Variable 0
2 Read Loop Current And Percent
Of Range
3 Read Dynamic Variables And
Loop Current
1-127
1-5
6
7
8
9-15
16
17-127
0
1-5
6
7
8
9-15
16
17-127
0
1-5
6
7
8
9-15
16
17-127
Success
N/A
Success
N/A
Error
N/A
Warning
N/A
Error
N/A
Success
N/A
Error
N/A
Warning
N/A
Error
N/A
Success
N/A
Error
N/A
Warning
N/A
Error
N/A
No Command-Specific Errors
Undefined
No Command-Specific Errors
Undefined
Device-Specific Command Error
Undefined
Update Failure
Undefined
Access Restricted
Undefined
No Command-Specific Errors
Undefined
Device-Specific Command Error
Undefined
Update Failure
Undefined
Access Restricted
Undefined
No Command-Specific Errors
Undefined
Device-Specific Command Error
Undefined
Update Failure
Undefined
Access Restricted
Undefined
flowserve.com
61
Page 62

62
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Command Response Code
No. Description Code Class Description
6 Write Polling Address 0
7 Read Loop Configuration 0
8 Read Dynamic Variable Class 0
9 Read Device Variables with
Status
11 Read Unique Identifier
Associated With Tag
12 Read Message 0
13 Read Tag, Descriptor, Date 0
14 Read Primary Variable
Transducer Information
15 Read Device Information 0
16 Read Final Assembly Number 0
17 Write Message 0
1
2
3-4
5
6
7
8-11
12
13-15
16
17-31
32
33-127
1-15
16
17-127
1-15
16
17-127
0
1
2
3-4
5
6
7
8
9-13
14
115
16
17-29
30
31-127
0
1-127
1-15
16
17-31
32
33-127
1-15
16
17-31
32
33-127
0
1-15
16
17-31
32
33-127
1-15
16
17-31
32
33-127
1-15
16
17-31
32
33-127
1-4
5
6
7
8-15
16
17-31
32
33-127
Success
N/A
Error
N/A
Error
Error
Error
N/A
Error
N/A
Error
N/A
Error
Undefined
Success
N/A
Error
N/A
Success
N/A
Error
N/A
Success
N/A
Error
N/A
Error
Error
N/A
Warning
N/A
Warning
N/A
Error
N/A
Warning
Undefined
Success
N/A
Success
N/A
Error
N/A
Error
N/A
Success
N/A
Error
N/A
Error
N/A
Success
N/A
Error
N/A
Error
N/A
Success
N/A
Error
N/A
Error
N/A
Success
N/A
Error
N/A
Error
N/A
Success
N/A
Error
Error
Error
N/A
Error
N/A
Error
N/A
No Command-Specific Errors
Undefined
Invalid Poll Address Selection
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Undefined
Invalid Mode Selection
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Access Restricted
Undefined
No Command-Specific Errors
Undefined
Access Restricted
Undefined
No Command-Specific Errors
Undefined
Invalid Selection
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
Undefined
Update Failure
Undefined
Dynamic Variables Returned for Device Variables
Undefined
Access Restricted
Undefined
Command Response Truncated
Undefined
No Command-Specific Errors
Undefined
No Command-Specific Errors
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Undefined
Access Restricted
Undefined
Busy
Undefined
Page 63

Command Response Code
No. Description Code Class Description
18 Write Tag, Descriptor, Date 0
19 Write Final Assembly Number 0
20 Read Long Tag 0
21 Read Unique Identifier
Associated With Long Tag
22 Write Long Tag 0
38 Reset Configuration Changed
Flag
48 Read Additional Device Status 0
33 Read Device Variables 0
1-4
5
6
7
8
9
10-15
16
17-31
32
33-127
1-4
5
6
7
8-15
16
17-31
32
33-127
1-15
16
17-31
32
33-127
0
1
1-4
5
6
7
8-15
16
17-31
32
33
34
35
36
37-127
0
1-4
5
6
7
8
9
10-15
16
17-127
1-4
5
6
7
8
9-13
14
15
16
17-127
1
2
3-4
5
6
7
8
9-15
16
17-127
Success
N/A
Error
Error
Error
N/A
Error
N/A
Error
N/A
Error
N/A
Success
N/A
Error
Error
Error
N/A
Error
N/A
Error
N/A
Success
N/A
Error
N/A
Error
N/A
Success
N/A
Success
N/A
Error
Error
Error
N/A
Error
N/A
Error
Error
Error
Error
Error
Error
Success
N/A
Error
Error
Error
N/A
Error
N/A
Error
N/A
Success
N/A
Error
Error
N/A
Warning
N/A
Warning
N/A
Error
N/A
Common Commands
Success
N/A
Error
N/A
Error
Error
N/A
Warning
N/A
Error
N/A
No Command-Specific Errors
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Undefined
Invalid Date Code Detected
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
No Command-Specific Errors
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Undefined
Access Restricted
Undefined
Busy
DR Initiated
DR Running
DR Dead
DR Conflict
Undefined
No Command-Specific Errors
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Undefined
Configuration Change Counter Mismatch
Undefined
Access Restricted
Undefined
No Command-Specific Errors
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
Undefined
Update in Progress
Undefined
Status Bytes Mismatch
Undefined
Access Restricted
Undefined
No Command-Specific Errors
Undefined
Invalid Selection
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
Undefined
Updated Failure
Undefined
Access Restricted
Undefined
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
flowserve.com
63
Page 64

64
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Command Response Code
No. Description Code Class Description
35 Write Primary Variable Range
Values
36 Set Primary Variable Upper
Range Value
37 Set Primary Variable Lower
Range Value
40 Enter/Exit Fixed Current Mode 0
41 Perform Self Test 0
42 Perform Device Reset 0
0
1
2
3-4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19-28
29
30-31
32
33-127
0
1-5
6
7
8
9
10
11-13
14
15
16
17-28
29
30-31
32
33-127
0
1-5
6
7
8
9
10
11-13
14
15
16
17-28
29
30-31
32
33-127
1-2
3
4
5
6
7
8-10
11
12-15
16
17-31
32
33-127
1-5
6
7-15
16
17-31
32
33-127
1-5
6
7-15
16
17-31
32
33-127
Success
N/A
Error
N/A
Error
Error
Error
Warning
Error
Error
Error
Error
Error
Warning
N/A
Error
N/A
Error
N/A
Error
N/A
Error
N/A
Success
N/A
Error
Error
Warning
Error
Error
N/A
Warning
N/A
Error
N/A
Error
N/A
Error
N/A
Success
N/A
Error
Error
N/A
Error
Error
N/A
Warning
N/A
Error
N/A
Error
N/A
Error
N/A
Success
N/A
Error
Error
Error
Error
Error
N/A
Error
N/A
Error
N/A
Error
N/A
Success
N/A
Error
N/A
Error
N/A
Error
N/A
Success
N/A
Error
N/A
Error
N/A
Error
N/A
No Command-Specific Errors
Undefined
Invalid Selection
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Set to Nearest Possible Value (Upper or Lower Range Pushed)
Lower Range Value Too High
Lower Range Value Too Low
Upper Range Value Too High
Upper Range Value Too Low
Upper and Lower Range Values Out of Limits
Span Too Small (Device Accuracy May be Impaired)
Undefined
Access Restricted
Undefined
Invalid Units Code
Undefined
Invalid Span
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Device-Specific Command Error
In Write Protect Mode
Set To Nearest Possible Value (Upper Range Value Pushed)
Applied Process Too High
Applied Process Too Low
Undefined
Span Too Small (Device Accuracy May be Impaired)
Undefined
Access Restricted
Undefined
Invalid Span
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Device-Specific Command Error
In Write Protect Mode
Undefined
Applied Process Too High
Applied Process Too Low
Undefined
New Lower Range Value Pushed
Undefined
Access Restricted
Undefined
Invalid Span
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Passed Parameter Too Large
Passed Parameter Too Small
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Undefined
Loop Current Not Active (Device in Multi-drop Mode)
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Device-Specific Command Error
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Device-Specific Command Error
Undefined
Access Restricted
Undefined
Busy
Undefined
Page 65

Command Response Code
No. Description Code Class Description
45 Trim Loop Current Zero 0
49 Write Primary Variable
Transducer Serial Number01-4
1-2
3
4
5
6
7
8
9
10
11
12-15
16
17-31
32
33-127
5
6
7
8-15
16
17-31
32
33-127
Success
N/A
Error
Error
Error
Error
Error
N/A
Error
N/A
Error
N/A
Error
N/A
Error
N/A
Success
N/A
Error
Error
Error
N/A
Error
N/A
Error
N/A
No Command-Specific Errors
Undefined
Passed Parameter Too Large
Passed Parameter Too Small
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Undefined
Incorrect Loop Current Mode or Value
Undefined
Loop Current Not Active (Device in Multi-drop Mode)
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Undefined
Access Restricted
Undefined
Busy
Undefined
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
flowserve.com
65
Page 66

MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Command Response Code
No. Description Code Class Description
50 Read Dynamic Variable
Assignments
51 Write Dynamic Variable
Assignments
53 Write Device Variable Units 0
54 Read Device Variable Information 0
56 Write Device Variable Transducer
Serial No.
59 Write Number of Response
Preambles
60 Read Analog Channel and
Percent of Range
0
1-5
6
7-15
16
17-127
0
1
2
3-4
5
6
7
8-15
16
17-31
32
33-127
1-4
5
6
7
8-10
11
12
13-15
16
17-31
32
33-127
1
2
3-4
5
6
7-15
16
17-31
32
33-127
0
1
2
3-4
5
6
7
8-15
16
17-31
32
33-127
0
1-2
3
4
5
6
7
8
9-15
16
17-31
32
33-127
0
1
2
3-4
5
6
7
8
9-15
16
17-127
Success
N/A
Error
N/A
Error
N/A
Success
N/A
Error
N/A
Error
Error
Error
N/A
Error
N/A
Error
N/A
Success
N/A
Error
Error
Error
N/A
Error
Error
N/A
Error
N/A
Error
N/A
Success
N/A
Error
N/A
Error
Error
N/A
Error
N/A
Error
N/A
Success
N/A
Error
N/A
Error
Error
Error
N/A
Error
N/A
Error
N/A
Success
N/A
Error
Error
Error
Error
Error
Warning
N/A
Error
N/A
Error
N/A
Success
N/A
Error
N/A
Error
Error
N/A
Warning
N/A
Error
N/A
No Command-Specific Errors
Undefined
Device-Specific Command Error
Undefined
Access Restricted
Undefined
No Command-Specific Errors
Undefined
Invalid Selection
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Undefined
Invalid Device Variable Code
Invalid Units Code
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Invalid Selection
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Invalid Selection
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Passed Parameter Too Large
Passed Parameter Too Small
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Set to Nearest Possible Value
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Invalid Selection
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
Undefined
Update Failure
Undefined
Access Restricted
Undefined
66
Page 67

Command Response Code
No. Description Code Class Description
63 Read Analog Channel
Information
65 Write Analog Channel Range
Values
66 Enter/Exit Fixed Analog Channel
Mode
67 Trim Analog Channel Zero 0
68 Trim Analog Channel Gain 0
0
1
2
3-4
5
6
7-15
16
17-127
0
1-4
5
6
7
8
9
10
11
12
13
14
15
16
17-27
28
29
17-31
32
33-127
0
1-2
3
4
5
6
7
8-10
11
12
13-14
15
16
17-31
32
33-127
1-2
3
4
5
6
7
8
9
10
11
12
13-14
15
16
17-31
32
33-127
1-2
3
4
5
6
7
8
9
10
11
12
13-14
15
16
17-31
32
33-127
Success
N/A
Error
N/A
Error
Error
N/A
Error
N/A
Success
N/A
Error
Error
Error
Warning
Error
Error
Error
Error
Error
Warning
Error
Error
N/A
Error
Error
N/A
Error
N/A
Success
N/A
Error
Error
Error
Error
Error
N/A
Error
Error
N/A
Error
Error
N/A
Error
N/A
Success
N/A
Error
Error
Error
Error
Error
N/A
Error
N/A
Error
Error
N/A
Error
Error
N/A
Error
N/A
Success
N/A
Error
Error
Error
Error
Error
N/A
Error
N/A
Error
Error
N/A
Error
Error
N/A
Error
N/A
No Command-Specific Errors
Undefined
Invalid Selection
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
Undefined
Access Restricted
Undefined
No Command-Specific Errors
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Set to Nearest Possible Value (Upper or Lower Range Pushed)
Lower Range Value Too High
Lower Range Value Too Low
Upper Range Value Too High
Upper Range Value Too Low
Upper and Lower Range Values Out of Limits
Span Too Small (Device Accuracy May be Impaired)
Invalid Analog Channel Code Number
Access Restricted
Undefined
Invalid Range Units Code
Invalid Span
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Passed Parameter Too Large
Passed Parameter Too Small
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Undefined
In Multi-drop Mode
Invalid Units Code
Undefined
Invalid Analog Channel Code Number
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Passed Parameter Too Large
Passed Parameter Too Small
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Undefined
Not in Proper Analog Channel Mode
Undefined
In Multi-drop Mode
Invalid Units Cod
Undefined
Invalid Analog Channel Code Number
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Passed Parameter Too Large
Passed Parameter Too Small
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Undefined
Not in Proper Analog Channel Mode
Undefined
In Multi-drop Mode
Invalid Units Cod
Undefined
Invalid Analog Channel Code Number
Access Restricted
Undefined
Busy
Undefined
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
flowserve.com
67
Page 68

68
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Command Response Code
No. Description Code Class Description
71 Lock Device 0
76 Read Lock Device State 0
78 Read Aggregated Commands 0
79 Command 79 Write Device
Variable
89 Set Real Time Clock 0
90 Read Real Time Clock 0
1-4
5
6
7-9
10
11
12-15
16
17-31
32
33
34
35
36
37-127
1-5
6
7-15
16
17-31
32
33-127
1
2
3-4
5
6
7
8
9
10-29
30
31
32
33
34
35
36
37-127
0
1
2
3-4
5
6
7
8
9
10
11-13
14
15
16
17
18
19
20-31
32
33
34
35
36
37-127
1
2
3
4
5
6
7
8-15
16
17-127
1-5
6
7-127
Success
N/A
Error
Error
N/A
Error
Error
N/A
Error
N/A
Error
Error
Error
Error
Error
N/A
Success
N/A
Error
N/A
Error
N/A
Error
N/A
Success
N/A
Error
N/A
Error
Error
N/A
Warning
Error
N/A
Warning
N/A
Error
Error
Error
Error
Error
N/A
Success
N/A
Error
N/A
Error
Error
Error
Warning
N/A
Error
N/A
Warning
N/A
Error
Error
Error
Error
N/A
Error
Error
Error
Error
Error
N/A
Success
N/A
Error
Error
N/A
Error
Error
Error
N/A
Error
N/A
Success
N/A
Error
N/A
No Command-Specific Errors
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
Undefined
Invalid Lock Code
Cannot Lock Device
Undefined
Access Restricted
Undefined
Busy
DR Initiated
DR Running
DR Dead
DR Conflict
Undefined
No Command-Specific Errors
Undefined
Device-Specific Command Error
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Invalid Selection
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
Undefined
Update Failure
Invalid Command Request
Undefined
Command Response Truncated – One or more commands are
dropped in the response
Undefined
Busy
DR Initiated
DR Running
DR Dead
DR Conflict
Undefined
No Command-Specific Errors
Undefined
Invalid Selection
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Device Family Status Bits Not Set
Undefined
Invalid Write Device Variable Command Code
Undefined
Requested value was returned in command response but Rate-ofChange limit was exceeded. Device Variable Tracking to value written
at maximum rate allowed.
Undefined
Access Restricted
Invalid Device Variable Index
Invalid Units Code
Device Variable Index not allowed for this command
Undefined
Busy
DR Initiated
DR Running
DR Dead
DR Conflict
Undefined
No Command-Specific Errors
Undefined
Invalid Selection (Time-set code)
Passed Parameter Too Large
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Undefined
Access Restricted
Undefined
No Command-Specific Errors
Undefined
Device-Specific Command Error
Undefined
Page 69

Command Response Code
No. Description Code Class Description
91 Read Trend Configuration 0
92 Write Trend Configuration 0
93 Read Trend 0
95 Read Device Communications
Statistics
103 Write Burst Period 0
104 Write Burst Trigger 0
105 Read Burst Mode Configuration 0
1-4
5
6
7-10
11
12-127
1
2
3
4
5
6
7
8
9-10
11
12-15
16
17
18-127
1-4
5
6
7
8
9-10
11
12-127
0
1-5
6
7-127
1-4
5
6
7
8
9
10-15
16
17-31
32
33
34
35
36
37-127
1-2
3
4
5
6
7
8
9
10
11
12
13
14-15
16
17-31
32
33
34
35
36
37-127
1-5
6
7-8
9
10-31
32
33-127
Success
N/A
Error
Error
N/A
Error
N/A
Success
N/A
Error
Error
Error
Error
Error
Error
Warning
N/A
Error
N/A
Error
Error
N/A
Success
N/A
Error
Error
N/A
Warning
N/A
Error
N/A
Success
N/A
Error
N/A
Success
N/A
Error
Error
Error
Warning
Error
N/A
Error
N/A
Error
Error
Error
Error
Error
N/A
Success
N/A
Error
Error
Error
Error
Error
Warning
Error
N/A
Error
Error
Error
N/A
Error
N/A
Error
Error
Error
Error
Error
N/A
Success
N/A
Error
N/A
Error
N/A
Error
N/A
No Command-Specific Errors
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
Undefined
Invalid Trend Number
Undefined
No Command-Specific Errors
Undefined
Invalid Selection
Passed Parameter Too Large (trend update period)
Passed Parameter Too Small (trend update period)
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Set to Nearest Possible Value (trend update period)
Undefined
Invalid Trend Number
Undefined
Access Restricted
Invalid Device Variable Index
Undefined
No Command-Specific Errors
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
Undefined
Trend not Active
Undefined
Invalid Trend Number
Undefined
No Command-Specific Errors
Undefined
Device-Specific Command Error
Undefined
No Command-Specific Errors
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Update Times Adjusted
Invalid Burst Message
Undefined
Access Restricted
Undefined
Busy
DR Initiated
DR Running
DR Dead
DR Conflict
Undefined
No Command-Specific Errors
Undefined
Passed Parameter Too Large
Passed Parameter Too Small
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Burst Condition Conflict
Invalid Burst Message
Undefined
Invalid Device Variable Classification
Invalid Units Code
Invalid Burst Trigger Mode Selection
Undefined
Access Restricted
Undefined
Busy
DR Initiated
DR Running
DR Dead
DR Conflict
Undefined
No Command-Specific Errors
Undefined
Device-Specific Command Error
Undefined
Invalid Burst Message
Undefined
Busy
Undefined
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
flowserve.com
69
Page 70

70
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
Command Response Code
No. Description Code Class Description
106 Flush Delayed Responses 0
107 Write Burst Device Variables 0
108 Write Burst Mode Command
Number
109 Burst Mode Control 0
115 Read Event Notification
Summary
116 Write Event Notification Bit Mask 0
117 Write Event Notification Timing 0
1-5
6
7
8
9-15
16
17-31
32
33-127
1
2
3-4
5
6
7
8
9
10-15
16
17-127
0
1
2
3-4
5
6
7
8
9
10-15
16
17-127
1
2
3-4
5
6
7
8
9
10-15
16
17-31
32
33
34
35
36
37-127
0
1
2
3-4
5
6
7-127
1
2
3-4
5
6
7
8-15
16
17-127
1-4
5
6
7
8
9
10-15
16
17-31
32
33
34
35
36
37-127
Success
N/A
Error
N/A
Warning
N/A
Error
N/A
Error
N/A
Success
N/A
Error
N/A
Error
Error
Error
Warning
Error
N/A
Error
N/A
Success
N/A
Error
N/A
Error
Error
Error
Warning
Error
N/A
Error
N/A
Success
N/A
Error
N/A
Error
Error
Error
Warning
Error
N/A
Error
N/A
Error
Error
Error
Error
Error
N/A
Success
N/A
Error
N/A
Error
Error
N/A
Success
N/A
Error
N/A
Error
Error
Error
N/A
Error
N/A
Success
N/A
Error
Error
Error
Warning
Error
N/A
Error
N/A
Error
Error
Error
Error
Error
N/A
No Command-Specific Errors
Undefined
Device-Specific Command Error
Undefined
All but running delayed responses flushed
Undefined
Access Restricted
Undefined
Busy
Undefined
No Command-Specific Errors
Undefined
Invalid Selection
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Burst Condition Conflict
Invalid Burst Message
Undefined
Access Restricted
Undefined
No Command-Specific Errors
Undefined
Invalid Selection
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Burst Condition Conflict
Invalid Burst Message
Undefined
Access Restricted
Undefined
No Command-Specific Errors
Undefined
Invalid Selection
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Update Period Increased (some bandwidth available)
No bandwidth available
Undefined
Access Restricted
Undefined
Busy
DR Initiated
DR Running
DR Dead
DR Conflict
Undefined
No Command-Specific Errors
Undefined
Invalid Selection
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
Undefined
No Command-Specific Errors
Undefined
Invalid Selection
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Undefined
Access Restricted
Undefined
No Command-Specific Errors
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Update Period or De-bounce Interval Adjusted
Invalid Event Specification number
Undefined
Access Restricted
Undefined
Busy
DR Initiated
DR Running
DR Dead
DR Conflict
Undefined
Page 71

Command Response Code
No. Description Code Class Description
118 Event Notification Control 0
119 Acknowledge Event Notification 0
512 Read Country Code 0
513 Write Country Code 0
1
2
3-4
5
6
7
8
9
10-13
14
15
16
17-31
32
33
34
35
36
37-127
1
2
3-4
5
6
7
8
9-15
16
17-127
1-5
6
7-127
1
2
3-4
5
6
7
8
9
10-15
16
17-31
32
33
34
35
36
37-127
Success
N/A
Error
N/A
Error
Error
Error
Warning
Error
N/A
Warning
N/A
Error
N/A
Error
Error
Error
Error
Error
N/A
Success
N/A
Error
N/A
Error
Error
N/A
Warning
N/A
Error
N/A
Success
N/A
Error
N/A
Success
N/A
Error
N/A
Error
N/A
Error
N/A
Error
N/A
Error
N/A
Error
Error
Error
Error
Error
N/A
No Command-Specific Errors
Undefined
Invalid Selection
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
In Write Protect Mode
Update Times Adjusted
No Bandwidth Available
Undefined
Update Rate Uncertain – only allowed when not connected to the
network
Undefined
Access Restricted
Undefined
Busy
DR Initiated
DR Running
DR Dead
DR Conflict
Undefined
No Command-Specific Errors
Undefined
Invalid Selection
Undefined
Too Few Data Bytes Received
Device-Specific Command Error
Undefined
Not All Events Cleared or (when publishing an Event Notification) one
or more event is pending for this Event Notification
Undefined
Access Restricted
Undefined
No Command-Specific Errors
Undefined
Device-Specific Command Error
Undefined
No Command-Specific Errors
Undefined
Invalid Selection
Undefined
Too Few Data Bytes Received
Undefined
In Write Protect Mode
Undefined
SI Units Restriction Failed (Not all Units Codes currently configured
are SI Compliant)
Undefined
Access Restricted
Busy
Undefined
DR Initiated
DR Running
DR Dead
DR Conflict
Undefined
MX/QX HART Field Unit FCD LMENIM2340-00 – 1/14
flowserve.com
71
Page 72

Flowserve Corporation
Flow Control
United States
Flowserve Limitorque
5114 Woodall Road
P.O. Box 11318
Lynchburg, VA 24506-1318
Phone: 434-528-4400
Fax: 434-845-9736
England
Flowserve Limitorque
Euro House
Abex Road
Newbury
Berkshire, RG14 5EY
United Kingdom
Phone: 44-1-635-46999
Fax: 44-1-635-36034
Japan
Limitorque – Nippon Gear Co., Ltd.
Asahi-Seimei Bldg. 4th Floor
1-11-11 Kit a-Saiwai, Nishi-Ku
Yokohama-Shi, (220-0004)
Japan
Phone: 81-45-326-2065
Fax: 81-45-320-5962
To find your local Flowserve representative,
visit www.flowserve.com, www.limitorque.com
or call USA 1 800 225 6989.
FCD LMENIM2340-00 (E) 1/14 © 2014 Flowserve Corporation.
Flowserve Corporation has established industry leadership in the design and manufacture of its products. When properly selected, this Flowserve
product is designed to perform its intended function safely during its useful life. However, the purchaser or user of Flowserve products should be aware
that Flowserve products might be used in numerous applications under a wide variety of industrial service conditions. Although Flowserve can (and
often does) provide general guidelines, it cannot provide specific data and warnings for all possible applications. The purchaser/user must therefore
assume the ultimate responsibility for the proper sizing and selection, installation, operation, and maintenance of Flowserve products. The purchaser/
user should read and understand the Installation Operation Maintenance (IOM) instructions included with the product, and train its employees and
contractors in the safe use of Flowserve products in connection with the specific application.
While the information and specifications contained in this literature are believed to be accurate, they are supplied for informative purposes only and
should not be considered certified or as a guarantee of satisfactory results by reliance thereon. Nothing contained herein is to be construed as a
warranty or guarantee, express or implied, regarding any matter with respect to this product. Because Flowserve is continually improving and upgrading
its product design, the specifications, dimensions and information contained herein are subject to change without notice. Should any question arise
concerning these provisions, the purchaser/user should contact Flowserve Corporation at any one of its worldwide operations or offices.
© 2013 Flowserve Corporation, Irving, Texas, USA. Flowserve is a registered trademark of Flowserve Corporation.
Canada
Flowserve Limitorque
120 Vinyl Court
Woodbridge, Ontario L4L 4A3
Canada
Phone: 905-856-4565
Fax: 905-856-7905
Singapore
Limitorque Asia, Pte., Ltd.
12, Tuas Avenue 20
Singapore 638824
Phone: 65-6868-4628
Fax: 65-6862-4940
China
Limitorque Beijing, Pte., Ltd.
RM A1/A2
22/F, East Area, Hanwei Plaza
No. 7 Guanghua Road, Chaoyang District
Beijing 100004, Peoples Republic of China
Phone: 86-10-5921-0606
Fax: 86-10-6561-2702
India
Flowserve Limitorque
No. 10-12, THE OVAL, Third floor
Venkatnarayana Road
T. Nagar, Chennai 600 017
Phone: 91-44-2432-8755
and 91-44-2432-4801
Fax: 91-44-2432-8754
flowserve.com
 Loading...
Loading...