

Fanuc B-65270EN Information Manual

ADDITIONAL INFORMATION
Y
Notice of the Update of Digital Servo Software for Series 30i/31i/32i (90D0 & 90E0)
1. Type of applied documents
Name
FANUC AC SERVO MOTOR α
FANUC AC SERVO MOTOR β
FANUC LINEAR MOTOR LiS series
FANUC SYNCHRONOUS BUILT-IN SERVO MOTOR DiS series
Parameter manual
Spec. No./Ver. B-65270EN / 07
i series
i series
2. Summary of Change
Group
Basic Function
Optional
Function
Unit
1. Illegal Parameter Setting Detection of the
Denominator of Reference Counter Capacity
has been supported.
2. Standard Parameter Table has been changed.
Maintenance
Parts
Notice
Correction
Name / Outline New, Add
Correct, Del
Add
Add
Applicable
Date
2008.01
2008.01
02
2008/03/14
01
2008/01/08
Another
K.Takayama
.Ueno
Name
The description of Adaptive Reso nance Elimination Filter
function in B-65270EN/07-002 (Edition 01) is deleted.
TITLE
Notice of the Update of Digital Servo
Software for Series 30i /31i /32i (90D0 &
Delete Adaptive Resonance Elimination Filter
Newly designed
DescriptionDate Ed.
90E0)
DRAW. No.
B-65270EN/07-002 (Edition02)
FANUC LTD
SHEET
(02)
CUST.
1/5
Y
Notice of the Update of Digital Servo Software for Series 30i/31i/32i (90D0 & 90E0)
1. Update Edition
ROM series New edition Available CNC
90D0 17
90E0 17
FS30i /31i (For HRV4 control)
FS30i /31i /32i (For HRV2 and HRV3 control)
2. Contents of change
- Illegal Parameter Setting Detection of the Denominator of Reference Counter Capacity
If we set Reference Counter Capacity by using a fraction, large denominator may induce a system
alarm because the calculation time is prolonged. So the following functions are added,
If the Denominator of Reference Counter Capacity is more than 100, Illegal Parameter Setting
Alarm occurs.
A funciton bit that ignores the Illegal Parameter Setting Alarm is added for the systems that
have already worked on a large value of Denominator of Reference Counter Capacity.
- Change of Standard Parameter Table
Standard Parameter Table has been changed.
3. Attached
Attached 1
Illegal Parameter Setting Detection of the Denominator of Reference Counter
Capacity
Attached 2 Change of Standard Parameter Table
TITLE
Notice of the Update of Digital Servo
Software for Series 30i /31i /32i (90D0 &
01
2008/01/08
.Ueno
Name
Newly designed
DescriptionDate Ed.
90E0)
DRAW. No.
B-65270EN/07-002 (Edition02)
FANUC LTD
SHEET
CUST.
2/5
Y
Attached 2. Illegal Parameter Setting Detection of the Denominator of Reference
Counter Capacity
(1) Outline
It is recommended that the denominator of Reference Counter Capacity is 100 or
less. But in case that the denominator of Reference Counter Capacity is more than
100, the processing time increases and there is a case that system alarm occurs.
This time, the following functions are added.
If the Denominator of Reference Counter Capacity is more than 100, Illegal
Parameter Setting Alarm occurs.
A funciton bit that ignores the Illegal Parameter Setting Alarm is added for the
systems that have already worked on a large value of Denominator of
Reference Counter Capacity.
(2) Available Servo software
(Series 30i, 31i, 32i )
90D0 series version 17(Q) and subsequent editions
90E0 series version 17(Q) and subsequent editions
(3) Parameters
new parameters
#7 #6 #5 #4 #3 #2 #1 #0
No.2299(FS30i)
IGNRFA(#5) Illegal parameter setting detection of the denominator of Reference Counter
related parameters (existing)
No.1821(FS30i)
[setting range] 0~999999999
No.2179(FS30i)
[setting range] 0~100
IGNRFA
Capacity is
0: done.
1: not done.
* If this parameter is changed, CNC must be turned OFF/ON.
※ After this edition of servo software, if the denominator of Reference Counter
Capacity is set to more than 100, illegal parameter setting alarm will occur
(detail No.1793).
※ This alarm can be ignored if IGNRFA is set to “1”.
Reference Counter Capacity (numerator)
Reference Counter Capacity (denominator)
(4) Notice
After this edition of servo software, if the denominator of Reference
Counter Capacity is set to more than 100, illegal parameter setting alarm
will occur. If the denominator can not be changed, please set parameter
No.2299#5 to “1”.
TITLE
Notice of the Update of Digital Servo
Software for Series 30i /31i /32i (90D0 &
01
2008/01/08
.Ueno
Name
Newly designed
DescriptionDate Ed.
90E0)
DRAW. No.
B-65270EN/07-002 (Edition02)
FANUC LTD
SHEET
CUST.
3/5
Y
Attached 3. Changes of Standard Parameter Table
- Series and editions of applicable servo software
(Series 30i, 31i, 32i )
Series 90D0/17(Q) and subsequent editions
Series 90E0/17(Q) and subsequent editions
Standard parameters of the following synchronous built-in servo motor are added.
List of Motor Model and ID No. for newly added Motors:
Motor Model Motor ID No. Notice
DiS22/1500
* These parameters are only for HRV3. They can not be used with HRV2 in place of HRV3.
* Please refer to Table 1 about the standard parameters.
Standard parameters of the following βi servo motors are added.
List of Motor Model and ID No. for newly added Motors:
Motor Model Motor ID No. Notice
βiS22/3000
βiS22/3000HV
* Please refer to Table 1 about the standard parameters.
Standard parameters of the following αi servo motors are added.
List of Motor Model and ID No. for newly added Motors:
Motor Model Motor ID No. Notice
αiS22/6000
αiS22/6000HV
* Please refer to Table 1 about the standard parameters.
449 200V for HRV3
313 200V HRV2, 3
314 400V HRV2, 3
452 200V HRV2, 3
453 400V HRV2, 3
TITLE
Notice of the Update of Digital Servo
Software for Series 30i /31i /32i (90D0 &
01
2008/01/08
.Ueno
Name
Newly designed
DescriptionDate Ed.
90E0)
DRAW. No.
B-65270EN/07-002 (Edition02)
FANUC LTD
SHEET
CUST.
4/5
Y
[table1] Addition of new standard parameters
Motor model
Motor specification 0082 0083 0482-B12x 0262 0263
Motor ID number 313 314 449 452 453
Symbol FS 30i, 31i, 32i
2004 00000011 00000011 00000011 00000011 00000011
2005 00000000 00000000 00000000 00000000 00000000
2006 00000000 00000000 00000000 00000000 00000000
2007 00000000 00000000 00000000 00000000 00000000
2008 00000000 00000000 00000000 00000000 00000000
2009 00000000 00000000 00000000 00000000 00000000
2010 00000000 00000000 00000000 00000000 00000000
2011 00000000 00000000 00000000 00000000 00000000
2012 00000000 00000000 00000000 00000000 00000000
2013 00001000 00001000 00000001 00000000 00000000
2014 00001000 00001000 00000000 00000000 00000000
2210 00000000 00000000 00000100 00000000 00000000
2211 00001110 00001110 00001010 00001010 00001010
2300 00000000 00000000 10000110 00000000 00000000
2301 00000000 00000000 00000000 00000000 00000000
PK1 2040 1157 1146 562 605 605
PK2 2041 -5102 -5267 -1568 -2393 -2393
PK3 2042 -1332 -1332 -2948 -1335 -1335
PK1V 2043 198 192 202 102 102
PK2V 2044 -1766 -1722 -1811 -914 -914
PK3V 2045 0 0000
PK4V 2046 -8235 -8235 -8235 -8235 -8235
POA1 2047 4297 4406 4657 4150 4150
BLCMP 2048 0 0000
DPFMX 2049 0 0000
POK1 2050 956 956 956 956 956
POK2 2051 510 510 510 510 510
RESERV 2052 0 0000
PPMAX 2053 21 21 21 21 21
PDDP 2054 1894 1894 1894 1894 1894
PHYST 2055 319 319 319 319 319
EMFCMP 2056 0 0000
PVPA 2057 -6174 -6174 -17944 -12039 -12039
PALPH 2058 -2843 -2843 -2257 -2000 -2000
PPBAS 2059 0 0000
TQLIM 2060 5462 5462 7282 7282 7282
EMFLMT 2061 0 0000
POVC1 2062 32520 32548 32439 32511 32501
POVC2 2063 3097 2755 4109 3215 3332
TGALMLV 2064 4 4444
POVCLMT 2065 9212 8192 10559 9565 9912
PK2VAUX 2066 0 0000
FILTER 2067 0 0000
FALPH 2068 0 0000
VFFLT 2069 0 0000
ERBLM 2070 0 0000
PBLCT 2071 0 0000
SFCCML 2072 0 0000
PSPTL 2073 0 0000
AALPH 2074 12288 8192 0 4096 4096
OSCTPL 2077 0 0000
PDPCH 2078 0 0000
PDPCL 2079 0 0000
DPFEX 2080 0 0000
DPFZW 2081 0 0000
BLENDL 2082 0 0000
MOFCTL 2083 0 0000
RTCURR 2086 2121 2069 2576 1977 1977
TDPLD 2087 0 0000
MCNFB 2088 0 0000
BLBSL 2089 0 0000
ROBSTL 2090 0 0000
ACCSPL 2091 0 0000
ADFF1 2092 0 0000
VMPK3V 2093 0 0000
BLCMP2 2094 0 0000
AHDRTL 2095 0 0000
RADUSL 2096 0 0000
SMCNT 2097 0 0000
DEPVPL 2098 0 0000
ONEPSL 2099 400 400 400 400 400
INPA1 2100 0 0000
INPA2 2101 0 0000
DBLIM 2102 0 0000
ABVOF 2103 0 0000
ABT
TRQCST 2105 848 869 348 819 819
LP24PA 2106 0 0000
VLGOVR 2107 0 0000
RESERV 2108 0 0000
BELLTC 2109 0 0000
MGSTCM 2110 1289 1289 2049 1288 1288
DETQLM 2111 7268 7268 16720 12830 12830
AMRDML 2112 0 0000
NFILT 2113 0 0000
NINTCT 2127 1967 3894 0 1000 2000
MFWKCE 2128 6000 6000 6500 1000 1000
MFWKBL 2129 2315 2315 792 3854 3854
LP2GP 2130 0 0000
LP4GP 2131 0 0000
LP6GP 2132 0 0000
PHDLY1 2133 5647 5647 30735 7690 7690
PHDLY2 2134 12820 12820 10270 8990 8990
DGCSMM 2159 0 0000
TRQCUP 2160 0 0000
OVCSTP 2161 0 0 0 140 0
POVC21 2162 32765 32765 0 32765 32765
POVC22 2163 40 38 0 34 34
POVCLMT2 2164 7166 6815 0 6222 6222
MAXCRT 2165 85 45 25 165 85
2003 00001000 00001000 00001000 00001000 00001000
SH 2104 0 0000
βiS22
3000
βiS22
3000HV
DiS22
/1500
(200V)
αiS22
6000
αiS22
6000HV
TITLE
Notice of the Update of Digital Servo
Software for Series 30i /31i /32i (90D0 &
01
2008/01/08
.Ueno
Name
Newly designed
DescriptionDate Ed.
90E0)
DRAW. No.
B-65270EN/07-002 (Edition02)
FANUC LTD
SHEET
CUST.
5/5
Notice of the Update of Digital Servo Software for Series 30i/31i/32i (90D0 & 90E0)
1. Type of applied documents
Name
FANUC AC SERVO MOTOR α
FANUC AC SERVO MOTOR β
FANUC LINEAR MOTOR LiS series
FANUC SYNCHRONOUS BUILT-IN SERVO MOTOR DiS series
Parameter manual
Spec. No./Ver. B-65270EN / 07
i series
i series
2. Summary of Change
Group
Basic Function
Optional
Function
Unit
・ Adaptive Resonance Elimination Filter function
has been supported.
・ Standard parameter table has been changed.
Maintenance
Parts
Notice
Correction
Name / Outline New, Add
Correct, Del
Correct
Add
Applicable
Date
2008.03
2008.03
Another
01 08.03.14 K.Takayama Newly designed
Ed Date Design Description
TITLE
Notice of the Update of Digital Servo Software
for Series 30i
DRAW. No.
/31i /32i (90D0 & 90E0)
CUST.
B-65270EN/07-004
SHEET
01/009
Notice of the Update of Digital Servo Software for Series 30i/31i/32i (90D0 & 90E0)
1. Update Edition
ROM series New edition Available CNC
90D0 19
90E0 19
FS30i /31i (For HRV4 control)
FS30i /31i /32i (For HRV2 and HRV3 control)
2. Contents of change
- Adaptive Resonance Elimination Filter function
Resonance Elimination Filter is a function that realizes high velocity gain due to the elimination of
the mechanical resonance.
“Adaptive Resonance Elimination Filter function” enables one of the four Resonance Elimination
Filters to dynamically adapt the changeable mechanical resonance caused by the following factors,
Changeable resonance depending on machine position.
Changeable resonance depending on slight differences of each machine.
Changeable resonance depending on the process of time.
Changeable resonance depending on the stiffness of work piece.
NOTE
We already reported about Adaptive Resonance Elimination Filter function in the previous
technical reports, B-65270EN/06-011 and B-65270EN/06-009. However, some specifications of
this function has been changed in servo software 90D0, 90E0 / S(19) . When you use Advance
Resonance Elimination Filter, please use servo software 90D0, 90E0/S(19) or later and follow
the specification described on this document.
- Standard parameter table has been changed
Standard parameters for αiF40/3000 and αiF40/3000 with FAN has been changed.
3. Attached
Attached 1
Attached 2 Changes of Standard Parameter Table
Adaptive Resonance Elimination Filter function
01 08.03.14 K.Takayama Newly designed
Ed Date Design Description
TITLE
Notice of the Update of Digital Servo Software
for Series 30i
DRAW. No.
/31i /32i (90D0 & 90E0)
CUST.
B-65270EN/07-004
SHEET
02/009
A
Attached 1. Adaptive Resonance Elimination Filter function
(1) Outline
Former “ Active Resonance Elimination Filter” was “Resonance Elimination
Filter” which enabled to follow up the changeable mechanical resonance. Lately
“Adaptive Resonance Elimination Filter” was developed which enabled to adapt
to wider frequency band of resonance. This function can be applied to the
changeable mechanical resonance like the following cases.
Changeable resonance depending on machine position.
Changeable resonance depending on an individual difference of machine.
Changeable resonance depending on the process of time.
Changeable resonance depending on the stiffness of work piece.
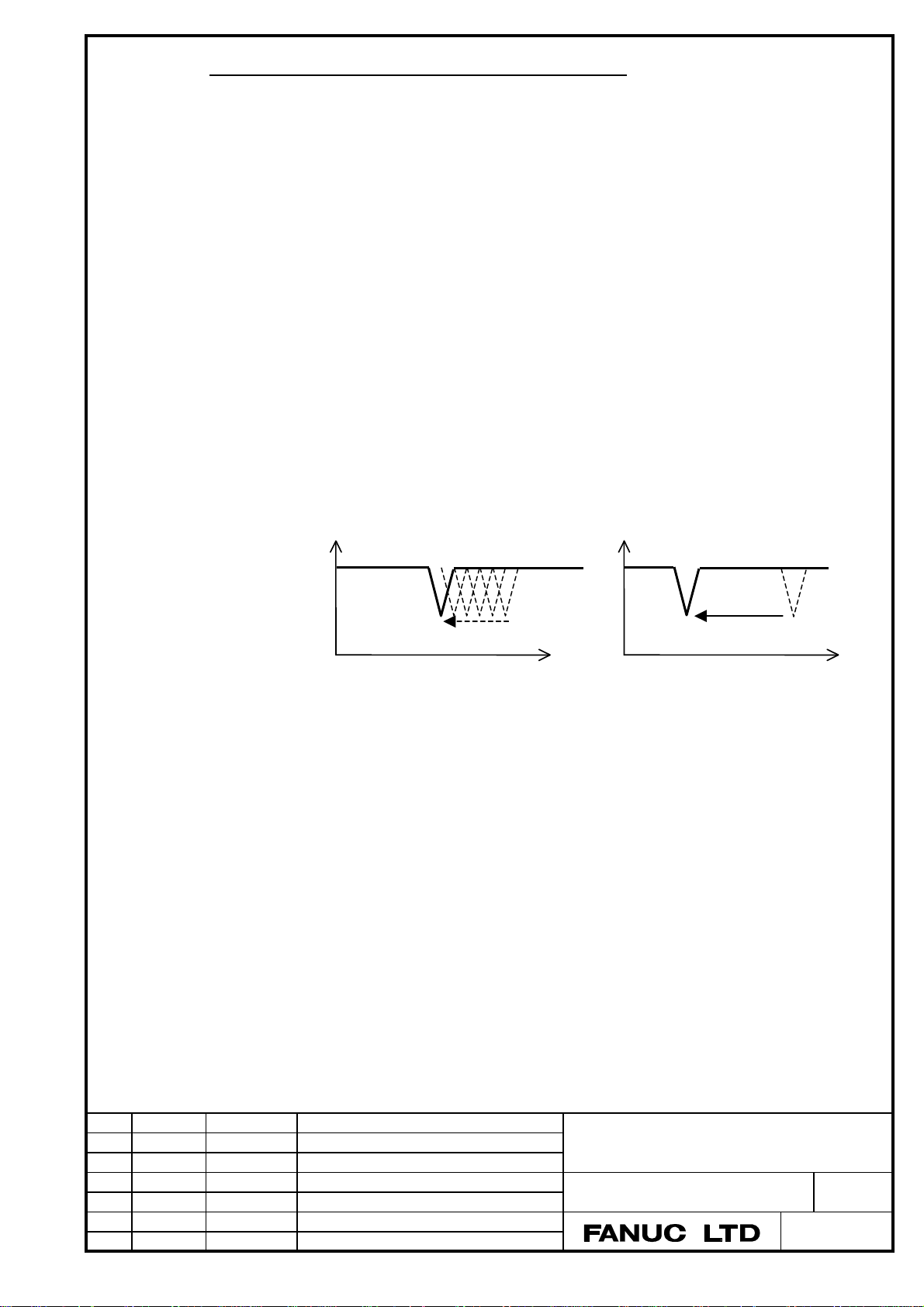
1) Follow-up mode and Search mode
There are two modes for this function. One of them is follow-up mode. This
mode is applied in case that the high following speed within a narrow bandwidth is
required, such as the changeable resonance depending on machine position.
Another is search mode. This mode is applied in case that the adaptation with
wide bandwidth is required, such as the changeable resonance depending on the
stiffness of work piece.
Characteristic of filter;
Following up gradual change
2) How to use
Normally follow-up mode is effective during axis feed except stop or PMC
signal ON (G322). Start / Stop of search mode is controlled by PMC signal
(G324).
3) Automatic renewal of parameter
Normally the adaptive result is lost by NC power off. But if N2290#5 is set to 1,
the adaptive result is automatically reflected in parameter (N2113) of Resonance
Elimination Filter 1. If the movable of resonance frequency is detected, the
parameter is renewed after follow-up mode OFF.
In case of search mode, if the movable of resonance frequency is detected, the
detective signal (F370) in PMC becomes ON.
It is possible to confirm the adaptive result on diagnostic display N763.
-
of resonance
F(Hz)
Characteristic of filter;
dapting to large change
of resonance
F(Hz)
01 08.03.14 K.Takayama Newly designed
Ed Date Design Description
TITLE
Notice of the Update of Digital Servo Software
for Series 30i
DRAW. No.
/31i /32i (90D0 & 90E0)
CUST.
B-65270EN/07-004
SHEET
03/009
(2) Available Servo software
90D0 series version S(19) or later (Series 30i, 31i )
90E0 series version S(19) or later (Series 30
90E3 series version B(02) or later (Series 30i, 31i, 32i )
(3) Notice
This function is available with first filter (N2113) out of four resonance
elimination filters.
Damping parameter (N2359) is available in this function.
This function is effective after a release of emergency stop.
The following CNC software is required to use parameter automatic renewal.
G002,G012,G022,G032,G101,G111,G121,G131,G201/30 or later
G003,G013,G023,G033,G103,G113,G123,G133,G201/13 or later
(4) Parameters
#7 #6 #5 #4 #3 #2 #1 #0
No.2270 (FS30i)
ACREF (#3) Adaptive resonance elimination filter
0: Ineffective.
Set “1” to the axis you want to use this function.
#7 #6 #5 #4 #3 #2 #1 #0
No.2290 (FS30i)
FRFATE (#3) Executive condition for follow-up mode
FRFDES (#4) Executive condition for follow-up mode
0: Depending on FRFATE (#3)
FRFPWE (#5) Parameter automatic renewal
0: Unavailable
ACREF
1: Effective.
FRFPWE FRFDES FRFATE
0: During axis feed or PMC signal ON (G322)
1: During axis feed except cutting mode or PMC signal ON (G322)
Normally follow-up mode is effective during axis feed or PMC signal ON.
But if this parameter is set, this mode is effective during axis feed except cutting
mode.
1: Only depending on PMC signal (G322)
If this parameter is set, follow-up mode depends on PMC signal only.
1: Available
Normally the adaptive result isn’t reflected to parameter (N2113) after
adaptation. But if this parameter is set, the result is reflected.
i, 31i, 32i )
01 08.03.14 K.Takayama Newly designed
Ed Date Design Description
TITLE
Notice of the Update of Digital Servo Software
for Series 30i
DRAW. No.
/31i /32i (90D0 & 90E0)
CUST.
B-65270EN/07-004
SHEET
04/009
No.2113 (FS30i)
Data unit Hz
Valid data range 100 to 1kHz (HRV2), to 2kHz (HRV3), to 4kHz (HRV4)
Follow-up range 100 to 990Hz (HRV2), to 1270Hz (HRV3,HRV4)
No.2177 (FS30i)
Data unit Hz
Valid data range 10 to (N2113)
No.2359 (FS30i)
Data unit Hz
Valid data range 0 to 100
No.2351 (FS30i)
Data unit Hz
Standard setting 0 (If 0 is set, this parameter is internally handled as 40Hz.)
No.2352 (FS30i)
Data unit Torque command (7282 per Imax)
Standard setting more than 48 (If 0 is set, this parameter is internally handled as 16.)
No.2459 (FS30i)
Data unit Hz
Standard setting 0 (If 0 is set, this parameter is internally handled as 890Hz.)
Resonance Elimination Filter1 : Attenuation center frequency
When this function is effective (N2270#3=1), this filter can adapt attenuation center
frequency to changeable machine resonance within bandwidth (N2351 or N2459).
But if the setting is out of follow-up range, this function is unavailable.
If this parameter is rewritten by manual, the adaptive result is lost .
Resonance Elimination Filter1 : attenuation bandwidth
Resonance Elimination Filter1 : Damping
Adaptive Resonance Elimination Filter : Follow-up bandwidth
This parameter decides follow-up bandwidth for follow-up mode.
Adaptive Resonance Elimination Filter : Detective level
Note
This parameter decides the detective revel of resonance spectrum.
If there is the large noise to disturb the correct detection, please increase this
value. When you use this function, you should confirm the effectiveness of
this function on your machine.
Adaptive Resonance Elimination Filter : Search bandwidth
This parameter decides search bandwidth for search mode.
The search range will be from (N2113–N2459)Hz to (N2113+N2459)Hz.
01 08.03.14 K.Takayama Newly designed
Ed Date Design Description
TITLE
Notice of the Update of Digital Servo Software
for Series 30i
DRAW. No.
/31i /32i (90D0 & 90E0)
CUST.
B-65270EN/07-004
SHEET
05/009
(5) PMC Signals
Follow-up mode and Search mode
Follow-up mode can adapt the attenuation center frequency (N2113) to
resonance within follow-up bandwidth (N2351). When high-speed follow-up
within narrow bandwidth (+-40Hz) are required, this mode is effective.
Search mode can adapt the attenuation center frequency (N2113) to resonance
within search bandwidth (N2459). When wide bandwidth for search is required
such as the work change with different resonance, this mode is effective.
Follow-up mode signal G322
[Classification] Input signal
[Function] Control start / stop for follow-up mode
[Operation] Normally this mode is effective during axis feed. If this
signal is ON, this mode is effective even if it is stop state.
Search mode signal G324
[Classification] Input signal
[Function] Control start / stop for search mode
[Operation] Search mode is effective while this signal is ON.
Search mode detective signal F370
[Classification] Output signal
[Function] Inform the finish for search mode
[Operation] If resonance is detected, this signal becomes ON
01 08.03.14 K.Takayama Newly designed
Ed Date Design Description
TITLE
Notice of the Update of Digital Servo Software
for Series 30i
DRAW. No.
/31i /32i (90D0 & 90E0)
CUST.
B-65270EN/07-004
SHEET
06/009
p
p
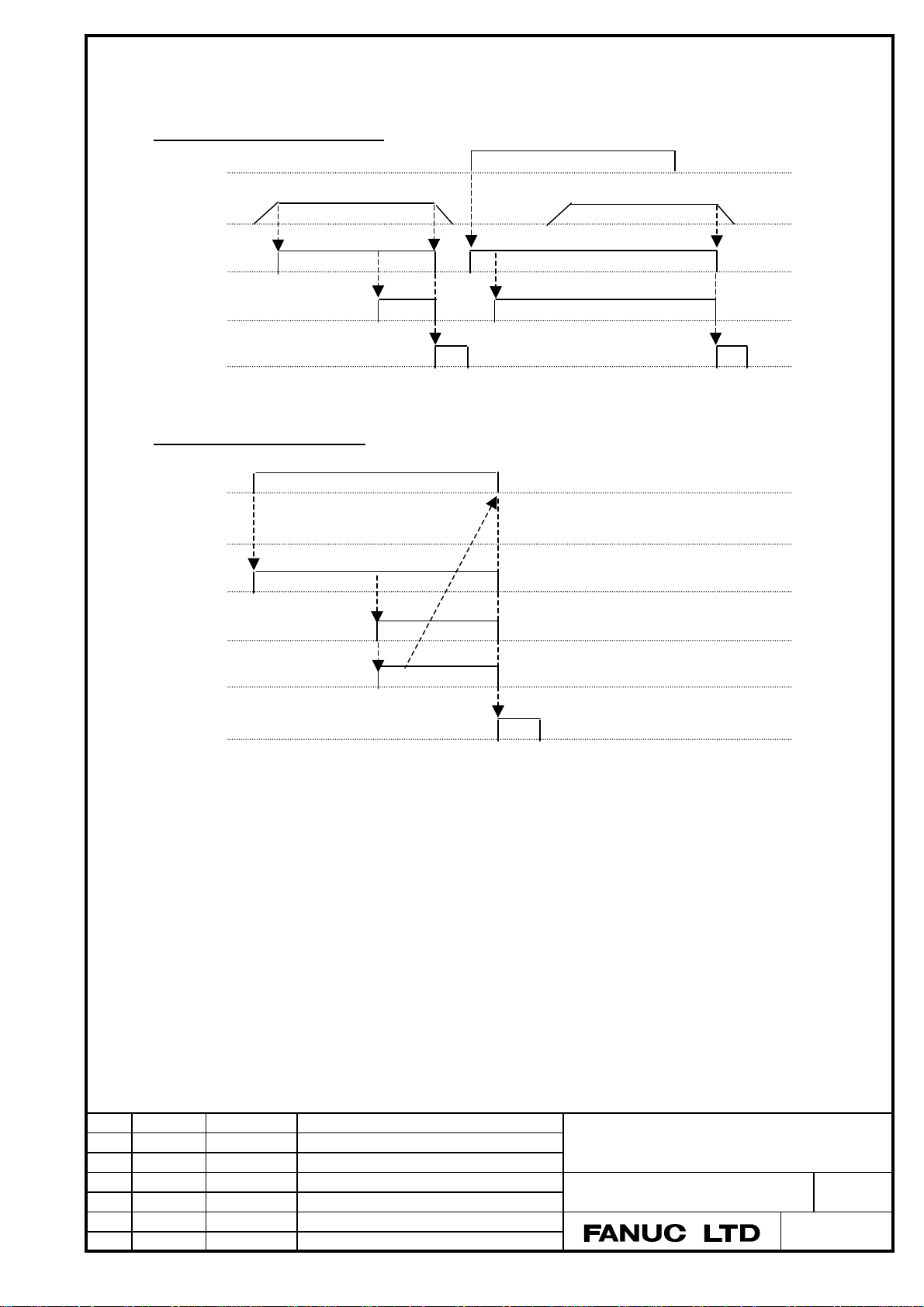
Timing chart
1) Follow-up mode(N2290#5=1)
ON
G322
Velocity
Condition
Detection
Parameter
renewal
Rapid Cutting
Sto
Follow-up
Detect
Detect
ON
Follow-up
ON
2) Search mode(N2290#5=1)
ON
G324
Velocity
Condition
OFF
Sto
Search
Detection
F370
Parameter
ON
ON
01 08.03.14 K.Takayama Newly designed
Ed Date Design Description
TITLE
Notice of the Update of Digital Servo Software
for Series 30i
DRAW. No.
/31i /32i (90D0 & 90E0)
CUST.
B-65270EN/07-004
SHEET
07/009
Attached 2. Changes of Standard Parameter Table
(1) Outline
The standard parameters of αiF40/3000 and αiF40/3000 with FAN are
changed to promote stability.
(2) Available Servo software
90D0 series version S(19) or later (Series 30i, 31i )
90E0 series version S(19) or later (Series 30i, 31i, 32i )
(3) Changed Standard paremeter
・ αiF40/3000(HRV2 control)[Motor ID =307]
Symbol Parameter No. Before Changed
PK1 No.2040 1613
PK2 No.2041 -7446
AALPH No.2074 16384
・ αiF40/3000 with FAN(HRV2 control) [Motor ID No=308]
1500
-8224
0
Symbol Parameter No. Before Changed
No.2211 00000010
PK1 No.2040 1613
PK2 No.2041 -7446
AALPH No.2074 16384
* Please refer to Table 1 about the standard parameters.
00001010
1500
-8224
0
01 08.03.14 K.Takayama Newly designed
Ed Date Design Description
TITLE
Notice of the Update of Digital Servo Software
for Series 30i
DRAW. No.
/31i /32i (90D0 & 90E0)
CUST.
B-65270EN/07-004
SHEET
08/009
Table1) Standard parameter table for changes
Motor Model
Symbol FS 30i, 31i, 32i
2004 00000011 00000011
2005 00000000 00000000
2006 00000000 00000000
2007 00000000 00000000
2008 00000000 00000000
2009 00000000 00000000
2010 00000000 00000000
2011 00100000 00100000
2012 00000000 00000000
2013 00000000 00000000
2014 00000000 00000000
2210 00000000 00000000
2211 00001010
2300 00000000 00000000
2301 00000000 00000000
PK1 2040
PK2 2041 -8224 -8224
PK3 2042 -1348 -1348
PK1V 2043 191 191
PK2V 2044 -1712 -1712
PK3V 2045 0 0
PK4V 2046 -8235 -8235
POA1 2047 2216 2216
BLCMP 2048 0 0
DPFMX 2049 0 0
POK1 2050 956 956
POK2 2051 510 510
RESERV 2052 0 0
PPMAX 2053 21 21
PDDP 2054 1894 1894
PHYST 2055 319 319
EMFCMP 2056 0 0
PVPA 2057 - 2570 -2570
PALPH 2058 -2000 -2000
PPBAS 2059 0 0
TQLIM 2060 7282 7282
EMFLMT 2061 0 0
POVC1 2062 32511 32431
POVC2 2063 3215 4212
TGALMLV 2064 4 4
POVCLMT 2065 9565 12545
PK2VAUX 2066 0 0
FILTER 2067 0 0
FALPH 2068 0 0
VFFLT 2069 0 0
ERBLM 2070 0 0
PBLCT 2071 0 0
SFCCML 2072 0 0
PSPTL 2073 0 0
AALPH 2074
OSCTPL 2077 0 0
PDPCH 2078 0 0
PDPCL 2079 0 0
DPFEX 2080 0 0
DPFZW 2081 0 0
BLENDL 2082 0 0
MOFCTL 2083 0 0
RTCURR 2086 1957 2593
TDPLD 2087 0 0
MCNFB 2088 0 0
BLBSL 2089 0 0
ROBSTL 2090 0 0
ACCSPL 2091 0 0
ADFF1 2092 0 0
VMPK3V 2093 0 0
BLCMP2 2094 0 0
AHDRTL 2095 0 0
RADUSL 2096 0 0
SMCNT 2097 0 0
DEPVPL 2098 0 0
ONEPSL 2099 400 400
INPA1 2100 0 0
INPA2 2101 0 0
DBLIM 2102 12000 12000
ABVOF 2103 0 0
ABTSH 2104 0 0
TRQCST 2105 1839 1839
LP24PA 2106 0 0
VLGOVR 2107 0 0
RESERV 2108 0 0
BELLTC 2109 0 0
MGSTCM 2110 1291 1291
DETQLM 2111 5220 5140
AMRDML 2112 0 0
NFILT 2113 0 0
NINTCT 2127 3041 3041
MFWKCE 2128 6000 2000
MFWKBL 2129 1560 1553
LP2GP 2130 0 0
LP4GP 2131 0 0
LP6GP 2132 0 0
PHDLY1 2133 2590 3085
PHDLY2 2134 8990 8990
DGCSMM 2159 0 0
TRQCUP 2160 0 0
OVCSTP 2161 140 140
POVC21 2162 32765 32718
POVC22 2163 33 629
POVCLMT2 2164 6099 10707
MAXCRT 2165 165 165
Motor Specification
Motor ID No.
2003 00001000 00001000
αiF40/3000 αiF40/3000Fan
0257 0257
307 308
00001010
1500 1500
0 0
01 08.03.14 K.Takayama Newly designed
Ed Date Design Description
TITLE
Notice of the Update of Digital Servo Software
for Series 30i
DRAW. No.
/31i /32i (90D0 & 90E0)
CUST.
B-65270EN/07-004
SHEET
09/009
Notice of the Update of Digital Servo Software for Series 30i/31i/32i (90D0 & 90E0)
1. Type of applied documents
Name
FANUC AC SERVO MOTOR α
FANUC AC SERVO MOTOR β
FANUC LINEAR MOTOR L
FANUC SYNCHRONOUS BUILT-IN SERVO MOTOR D
PARAMETER MANUAL
Spec. No./Ver. B-65270EN / 07
i series
i series
iS series
iS series
2. Summary of Change
Group
Basic Function ・ Speed Arrival Signal and Zero-Speed Detecting
Signal have been supported
Optional
Function
Unit
Maintenance
Parts
Notice
Correction
Name / Outline New, Add
Correct, Del
Add 2008.05
Applicable
Date
Another
01 08.05.21 Y.Ueno Newly designed
Ed Date Design Description
TITLE
Notice of the Update of Digital Servo Software
for Series 30i
DRAW. No.
B-65270EN/07-005
/31i /32i (90D0 & 90E0)
SHEET
01/005
CUST.
Notice of the Update of Digital Servo Software for Series 30i/31i/32i (90D0 & 90E0)
1. Update Edition
ROM series New edition Available CNC
90D0 20
90E0 20
FS30i /31i (For HRV4 control)
FS30i /31i /32i (For HRV2 and HRV3 control)
2. Contents of change
- Speed Arrival Signal and Zero-Speed Detecting Signal
From this edition, Speed arrival signal (SVSAR) and Zero-speed detecting signal (SVSST) that are
used in spindle control by servo motor have been supported.
3. Attached
Attached 1 Speed Arrival
Signal and Zero-Speed Detecting Signal
01 08.05.21 Y.Ueno Newly designed
Ed Date Design Description
TITLE
Notice of the Update of Digital Servo Software
for Series 30i
DRAW. No.
/31i /32i (90D0 & 90E0)
CUST.
B-65270EN/07-005
SHEET
02/005
Attached 1. Speed Arrival Signal and Zero-Speed Detecting Signal
(1) Outline
Speed arrival signal (SVSAR) and Zero-speed detecting signal (SVSST) that are used in spindle
control by servo motor have been supported.
Up to now, to judge speed arrival and
this modification,
Speed arrival signal (SVSAR) and Zero-speed detecting signal (SVSST) can be
used as same as spindle control.
These signals are effecive in using Spindle control by servo motor. Please refer to “FANUC Series
30i/31i/32i-A CONECTION MANUAL (FUNCTION)” for the detail of Spindle control with servo motor.
(2) Available Servo software
90D0 series version T(20) and subsequent editions (Series 30i, 31i )
90E0 series version T(20) and subsequent editions (Series 30i, 31i, 32i )
(3) Available System software
Please use the following system software in using Speed arrival signal and Z ero-speed detecting signal.
(system software)
31.0 and subsequent editions of the following system software series are available.
FS30i-A
G003, G013, G023, G033
G00C, G01C, G02C, G03C
FS31i-A5
G123, G133
G12C, G13C
FS31i-A
G103, G113
FS32i-A
G203
48.0 and subsequent editions of the following system software series are available.
FS30i-A
G002, G012, G022, G032
G00B, G01B, G02B, G03B
FS31i-A5
G121, G131
G12B, G13B
FS31i-A
G101, G111
FS32i-A
G201
zero speed, it’s necessary to observe actual speed by PMC. By
01 08.05.21 Y.Ueno Newly designed
Ed Date Design Description
TITLE
Notice of the Update of Digital Servo Software
for Series 30i
DRAW. No.
/31i /32i (90D0 & 90E0)
CUST.
B-65270EN/07-005
SHEET
03/005
j
j
(4) Parameters
2482 (FS30i)
[setting range] 0~1000
[setting unit] 0.1%
[default value] 0(Setting value “0” means “15”% internally.)
2483 (FS30i)
[setting range] 0~10000
[setting unit] 1/min
[default value] 0(Setting value “0” means “45”/min internally.)
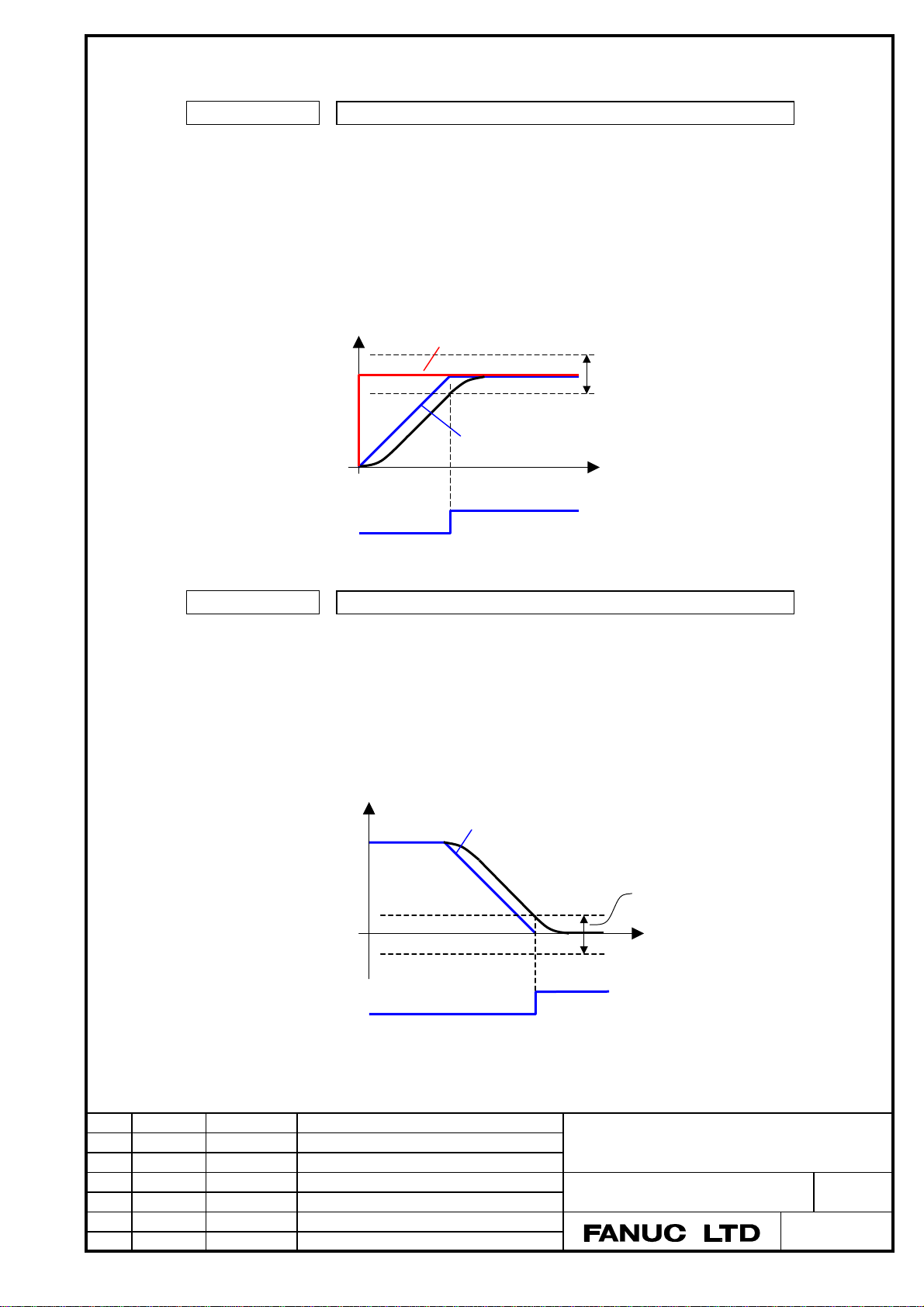
Detection level of speed arrival (SARLV)
Detection level of speed arrival means the ratio to commanded speed. When the
subtraction of actual speed from commanded becomes lower than (commanded
speed) × (ratio), actual speed is judged as reach to the commanded speed, and
Speed arrival signal, SVSARn becomes “1”.
speed
SVSAR=0 SVSAR=1
Detection level of speed zero (SSTLV)
Detection level of
stopping. When the actual speed becomes lower than detection level of
motor is judged to be stopped, and
“1”.
speed
Commanded speed for the
udgment of speed arrival
The range that speed arrival signal (SVSAR) is “1”
(speed command)×(1±SARLV/1000)
Actual speed
Speed command for speed control
(acceleration or deceleration is included)
time
zero speed means the revolution speed(1/min) that is used to judge
Zero-speed detecting signal, SVSSTn becomes
commanded speed for the
of zero speed
actual speed
SVSST=0 SVSST=1
udgment
the range that Zero-speed
detecting signal (SVSST) is “1”
±SSTLV[rpm]
time
zero speed,
01 08.05.21 Y.Ueno Newly designed
Ed Date Design Description
TITLE
Notice of the Update of Digital Servo Software
for Series 30i
DRAW. No.
/31i /32i (90D0 & 90E0)
CUST.
B-65270EN/07-005
SHEET
04/005
(5) PMC Signals
Speed arrival signal SVSAR1~SVSAR8<Fn377>
[Classification] Output signal
[Function] This signal shows that the actual speed of the servo motor arrives at the preset
range arround the commanded speed at spindle control by servo motor.
[Operation] - SVSARn becomes “1” when the actual speed arrives at the commanded speed.
- SVSARn becomes “0” when the actual speed has not arrived at the commanded
speed.
Zero-speed detecting signal SVSST1~SVSST8<Fn376>
[Classification] Output signal
[Function] This signal shows that the actual speed of the servo motor that is controled by
spindle control by servo motor comes into detection level of zero speed.
[Operation] - SVSSTn becomes “1” when the actual speed is zero.
- SVSSTn becomes “0” when the actual speed is not zero.
signal address
#7 #6 #5 #4 #3 #2 #1 #0
Fn376 SVSST8 SVSST7 SVSST6 SVSST5 SVSST4 SVSST3 SVSST2 SVSST1
#7 #6 #5 #4 #3 #2 #1 #0
Fn377 SVSAR8 SVSAR7 SVSAR6 SVSAR5 SVSAR4 SVSAR3 SVSAR2 SVSAR1
- SVSARn is “0” at emergency stop. So, aftter emergency stop, SVSARn becomes “0” even if the
motor is rotating and in the range of speed arrival. Also in case of some alarms and rotating with
dynamic brake, SVSARn becomes “0”.
- In the case of servo off, SVSARn will be “0”.
- As servo software always watches zero speed condition, SVSSTn will be changed according to
the real motor speed. (The signal condition will not relate to emergency stop, alarm, and servo off.)
- But when the motor feedback alarm (such as communication alarm by disconnection of encoder)
occurs, the feedback data will be unstable. Is such case, there is a possibility tha the output of the
signal might be wrong.
- You can’t use these two signals for safety function, which protects workers from danger by the
machine.
01 08.05.21 Y.Ueno Newly designed
Ed Date Design Description
TITLE
Notice of the Update of Digital Servo Software
for Series 30i
DRAW. No.
/31i /32i (90D0 & 90E0)
CUST.
B-65270EN/07-005
SHEET
05/005
Notice of the update of Digital Servo Software for Series 0
i/16i /18i /21i etc. (90B8/L, 90B1/L)
1. Type of applied documents
Name
FANUC AC SERVO MOTOR α
FANUC AC SERVO MOTOR β
LINEAR MOTOR L
iS series
SYNCHRONOUS BUILT-IN SERVO MOTOR D
PARAMETER MANUAL
Spec. No./Ver. B-65270EN/07
2. Summary of Change
Group
Basic Function
Optional
Function
Unit
Maintenance
Parts
Notice
Correction
Another
1. Changes of standard parameter table
Name / Outline New, Add
i series
i series
iS series
Applicable
Correct, Del
Add
2008.05
Date
2008.05.21
01
Date Ed.
Ueno
Design.
Newly designed
Description
TITLE
Notice of the update of Digital Servo
Software for Series 0
i/16i /18i /21i etc.
(90B8/L, 90B1/L)
DRAW. No.
B-65270EN/07-006
FANUC LTD
SHEET
CUST.
1/7
Notice of the update of Digital Servo Software for Series 0i/16i/18i/21i etc.
(90B8/L, 90B1/L)
.
1. Update Edition
ROM series New edition Available CNC
90B8 12
90B1 12
i-C, FS0iMate-C
FS0
FS15i, 16i, 18i, 21i, PMi -D, PMi -H
2. Contents of change
- Changes of standard parameter table
Standard parameter table has been changed.
3. Attached
Attached 1 Changes of Standard Parameter Table
2008.05.21
01
Date Ed.
Ueno
Design.
Newly designed
Description
TITLE
Notice of the update of Digital Servo
Software for Series 0
i/16i /18i /21i etc.
(90B8/L, 90B1/L)
DRAW. No.
B-65270EN/07-006
FANUC LTD
SHEET
CUST.
2/7
Attached 1. Changes of Standard Parameter Table
Standard parameters of the following synchronous built-in servo motor are added.
List of Motor Model and ID No. for newly added Motors:
Motor Model Motor ID No. Notice
DiS 22/1500
* When you load standard parameters by using this motor ID number, HRV3 control will be effective.
* In the case, you have to take care of the restrictions regarding HRV3 control (such as axis card and
number of control axes).
* When you want to use HRV2 control, please change following parameters.
- No.1707#0(Series15i)、No.2013#0(Series16i and etc.)=0
- No.1707#6(Series15i)、No.2013#6(Series16i and etc.)=1
* Please refer to “APPENDIX E VELOCITY LIMIT VALUES IN SERVO SOFTWARE” in parameter
manual about velocity limit of series 16i-B, etc.
* Please refer to Table 2 about the standard parameters.
449 200V for HRV3
Standard parameters of the following αi servo motors are added.
List of Motor Model and ID No. for newly added Motors:
Motor Model Motor ID No. Notice
αiS 300/2000
αiS 22/6000
αiS 22/6000HV
* Please refer to Table 1,2 about the standard parameters.
* If you have used ID number 115 (α300/2) for HRV1 control of α
please use ID number 242 from this edition.
242 200V for HRV1
452 200V for HRV2,3
453 400V for HRV2,3
iS300/2000 ,
Standard parameters of the following βi servo motors are added.
List of Motor Model and ID No. for newly added Motors:
Motor Model Motor ID No. Notice
βiS 22/3000
βiS 22/3000HV
βiS 22/3000
βiS 22/3000HV
* Please refer to Table 1 about the standard parameters.
213 200V for HRV1
214 400V for HRV1
313 200V for HRV2, 3
314 400V for HRV2, 3
2008.05.21
01
Date Ed.
Ueno
Design.
Newly designed
Description
TITLE
Notice of the update of Digital Servo
Software for Series 0
i/16i /18i /21i etc.
(90B8/L, 90B1/L)
DRAW. No.
B-65270EN/07-006
FANUC LTD
SHEET
CUST.
3/7
In order to promote stability, standard parameters of the following large servo motor are changed.
List of Motor Model and ID No. that standard parameters are changed:
Motor Model Motor ID No. Notice
αiF 40/3000
αiF 40/3000 FAN
αiF 40/3000
αiF 40/3000 FAN
* Please refer to Table 1 about the standard parameters.
207 200V for HRV1
208 400V for HRV1
307 200V for HRV2,3
308 400V for HRV2,3
In order to reduce the heat generation at high-speed rotation, standard parameters of the following large servo
motor are changed.
List of Motor Model and ID No. that standard parameters are changed:
Motor Model Motor ID No. Notice
αiS 2000/2000HV
(A06B-0091-B040)
* Please refer to Table 2 about the standard parameters.
340 400V
Standard parameters of the following large servo motors are added. With these parameters, the optimal control
can be done by making use of DC link voltage information, and heat generation at high-speed rotation can be
reduced.
To apply these parameters, the following conditions on servo software, servo amplifier, and power supply module
must be satisfied.
List of Motor Model and ID No. for newly added Motors:
Motor Model Motor ID No. Notice
αiS 2000/2000HV
(A06B-0091-B040)
αiS 3000/2000HV
(A06B-0092-B040)
* Please refer to Table 2 about the standard parameters.
NOTE1: To use these parameters, PDM is necessary. HRV3 (No.2013#0=1) is set for PDM, but the current
control is equivalent to HRV2.
<Condition>
servo software: Series 90B1,90B8/C(3) and subsequent editions
(L(12) and subsequent editions can execute parameter auto loading.)
servo amplifier: A06B-6127-H109 (α
power supply module: A06B-6150-H075 (α
A06B-6150-H100 (α
454 400V
455 400V
NOTE1
NOTE1
NOTE1
i SV-360HV)
i PS-75HV)
i PS-100HV)
2008.05.21
01
Date Ed.
Ueno
Design.
Newly designed
Description
TITLE
Notice of the update of Digital Servo
Software for Series 0
i/16i /18i /21i etc.
(90B8/L, 90B1/L)
DRAW. No.
B-65270EN/07-006
FANUC LTD
SHEET
CUST.
4/7
<Notice>
* If servo software, servo amplifier, or power supply module are older version than listed above, do not
use these parameters. (Use motor ID number 340 if α
* 90B1,90B8/L(12) and subsequent editions can execute parameter auto loading.
iS2000/2000HV has already used.)
2008.05.21
01
Date Ed.
Ueno
Design.
Newly designed
Description
TITLE
Notice of the update of Digital Servo
Software for Series 0
i/16i /18i /21i etc.
(90B8/L, 90B1/L)
DRAW. No.
B-65270EN/07-006
FANUC LTD
SHEET
CUST.
5/7
r
Table1) Standard paramter table for changes and new added models (Checked parameters are changed.)
Motor model
Motor specification 0257 0257 0082 0083 0292 0257 0257 0082 0083
Motor ID numbe
Symbol FS15i FS 16i, 18i, 21i
1808 2003 00001000 00001000 00001000 00001000 00001000 00001000 00001000 00001000 00001000
1809 2004 00000110 00000110 00000110 00000110 00000110 00000011 00000011 00000011 00000011
1883 2005 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000
1884 2006 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000
1951 2007 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000
1952 2008 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000
1953 2009 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000
1954 2010 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000
1955 2011 00100000 00100000 00000000 00000000 00100000 00100000 00100000 00000000 00000000
1956 2012 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000
1707 2013 00000000 00000000 00001000 00001000 00000000 00000000 00000000 00001000 00001000
1708 2014 00000000 00000000 00001000 00001000 00000000 00000000 00000000 00001000 00001000
1750 2210 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000
1751 2211 00001010 00001010 00001110 00001110 00000000 00001010 00001010 00001110 00001110
2713 2300 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000
2714 2301 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000
PK1 1852 2040 1289 1289 646 775 1357 1500 1500 1157 1146
PK2 1853 2041 -5048 -5048 -2486 -3580 -4212 -8224 -8224 -5102 -5267
PK3 1854 2042 -2696 -2696 -1298 -2663 -2710 -1348 -1348 -1332 -1332
PK1V 1855 2043 191 191 198 192 114 191 191 198 192
PK2V 1856 2044 -1712 -1712 -1766 -1722 -1023 -1712 -1712 -1766 -1722
PK3V 1857 2045 0 0 0 000000
PK4V 1858 2046 -8235 -8235 -8235 -8235 -8235 -8235 -8235 -8235 -8235
POA1 1859 2047 2216 2216 4297 4406 3709 2216 2216 4297 4406
BLCMP 1860 2048 0 0 0 000000
DPFMX 1861 2049 0 0 0 000000
POK1 1862 2050 956 956 956 956 956 956 956 956 956
POK2 1863 2051 510 510 510 510 510 510 510 510 510
RESERV 1864 2052 0 0 0 000000
PPMAX 1865 2053 21 21 21 21 21 21 21 21 21
PDDP 1866 2054 1894 1894 1894 1894 3787 1894 1894 1894 1894
PHYST 1867 2055 319 319 319 319 319 319 319 319 319
EMFCMP 1868 2056 0 0 0 000000
PVPA 1869 2057 -2570 -2570 -6174 -6174 -3850 -2570 -2570 -6174 -6174
PALPH 1870 2058 -2000 -2000 -2843 -2843 -800 -2000 -2000 -2843 -2843
PPBAS 1871 2059 0 0 0 000000
TQLIM 1872 2060 7282 7282 5462 5462 7282 7282 7282 5462 5462
EMFLMT 1873 2061 0 0 0 000000
POVC1 1877 2062 32511 32431 32520 32548 32391 32511 32431 32520 32548
POVC2 1878 2063 3215 4212 3097 2755 4714 3215 4212 3097 2755
TGALMLV 1892 2064 4 4 4 444444
POVCLMT 1893 2065 9565 12545 9212 8192 23263 9565 12545 9212 8192
PK2VAUX 1894 2066 0 0 -10 -1000000
FILTER 1895 2067 0 0 0 000000
FALPH 1961 2068 0 0 0 000000
VFFLT 1962 2069 0 0 0 000000
ERBLM 1963 2070 0 0 0 000000
PBLCT 1964 2071 0 0 0 000000
SFCCML 1965 2072 0 0 0 000000
PSPTL 1966 2073 0 0 0 000000
AALPH 1967 2074 8192 8192 8192 8192 12288 0 0 12288 8192
OSCTPL 1970 2077 0 0 0 000000
PDPCH 1971 2078 0 0 0 000000
PDPCL 1972 2079 0 0 0 000000
DPFEX 1973 2080 0 0 0 000000
DPFZW 1974 2081 0 0 0 000000
BLENDL 1975 2082 0 0 0 000000
MOFCTL 1976 2083 0 0 0 000000
RTCURR 1979 2086 1957 2593 2121 2069 2483 1957 2593 2121 2069
TDPLD 1980 2087 0 0 0 000000
MCNFB 1981 2088 0 0 0 000000
BLBSL 1982 2089 0 0 0 000000
ROBSTL 1983 2090 0 0 0 000000
ACCSPL 1984 2091 0 0 0 000000
ADFF1 1985 2092 0 0 0 000000
VMPK3V 1986 2093 0 0 0 000000
BLCMP2 1987 2094 0 0 0 000000
AHDRTL 1988 2095 0 0 0 000000
RADUSL 1989 2096 0 0 0 000000
SMCNT 1990 2097 0 0 0 000000
DEPVPL 1991 2098 0 0 0 000000
ONEPSL 1992 2099 400 400 400 400 400 400 400 400 400
INPA1 1993 2100 0 0 0 000000
INPA2 1994 2101 0 0 0 000000
DBLIM 1995 2102 15000 15000 0 0 15000 12000 12000 0 0
ABVOF 1996 2103 0 0 0 000000
ABTSH 1997 2104 0 0 0 000000
TRQCST 1998 2105 1839 1839 848 869 10871 1839 1839 848 869
LP24PA 1999 2106 0 0 0 000000
VLGOVR 1700 2107 0 0 0 000000
RESERV 1701 2108 0 0 0 000000
BELLTC 1702 2109 0 0 0 000000
MGSTCM 1703 2110 1291 1291 1289 1289 16 1291 1291 1289 1289
DETQLM 1704 2111 5140 5140 7268 7268 1606 5220 5140 7268 7268
AMRDML 1705 2112 0 0 0 000000
NFILT 1706 2113 0 0 0 000000
NINTCT 1735 2127 3041 3041 1967 3894 0 3041 3041 1967 3894
MFWKCE 1736 2128 2000 2000 6000 6000 5500 6000 2000 6000 6000
MFWKBL 1752 2129 1553 1553 2315 2315 791 1560 1553 2315 2315
LP2GP 1753 2130 0 0 0 000000
LP4GP 1754 2131 0 0 0 000000
LP6GP 1755 2132 0 0 0 000000
PHDLY1 1756 2133 3087 3087 5647 5647 1556 2590 3085 5647 5647
PHDLY2 1757 2134 8990 8990 12820 12820 20494 8990 8990 12820 12820
DGCSMM 1782 2159 0 0 0 000000
TRQCUP 1783 2160 0 0 0 000000
OVCSTP 1784 2161 140 140 0 0 140 140 140 0 0
POVC21 1785 2162 32765 32718 32765 32765 32738 32765 32718 32765 32765
POVC22 1786 2163 33 629 40 38 375 33 629 40 38
POVCLMT2 1787 2164 6099 10707 7166 6815 13952 6099 10707 7166 6815
MAXCRT 1788 2165 165 165 85 45 365 165 165 85 45
αiF40
3000
207 208 213 214 242 307 308 313 314
αiF40
3000Fan
βiS22
3000
βiS22
3000HV
αiS300
2000
αiF40
3000
αiF40
3000Fan
βiS22
3000
βiS22
3000HV
2008.05.21
01
Ueno
Newly designed
Date Ed.
Design.
Description
TITLE
Notice of the update of Digital Servo
Software for Series 0
i/16i /18i /21i etc.
(90B8/L, 90B1/L)
DRAW. No.
B-65270EN/07-006
FANUC LTD
SHEET
CUST.
6/7
r
Table2) Standard paramter table for changes and new added models (Checked parameters are changed.)
Motor model
Motor specification 0091 0482-B12x 0262 0263 0091 0092
Motor ID numbe
Symbol FS15i FS 16i, 18i, 21i
1808 2003 00001000 00001000 00001000 00001000 00001000 00001000
1809 2004 01000011 00000011 00000011 00000011 01000011 01000011
1883 2005 00000000 00000000 00000000 00000000 00000000 00000000
1884 2006 00000000 00000000 00000000 00000000 00000000 00000000
1951 2007 00000000 00000000 00000000 00000000 00000000 00000000
1952 2008 00000000 00000000 00000000 00000000 00000000 00000000
1953 2009 00000000 00000000 00000000 00000000 00000000 00000000
1954 2010 00000000 00000000 00000000 00000000 00000000 00000000
1955 2011 00000000 00000000 00000000 00000000 00000000 00000000
1956 2012 00000000 00000000 00000000 00000000 00000000 00000000
1707 2013 00000001 00000001 00000000 00000000 00000001 00000001
1708 2014 00000000 00000000 00000000 00000000 00000000 00000000
1750 2210 00000000 00000100 00000000 00000000 00000000 00000000
1751 2211 00011110 00001010 00001010 00001010 00011110 00011010
2713 2300 00000000 10000110 00000000 00000000 00000000 00000000
2714 2301 00000000 00000000 00000000 00000000 00000000 00000000
PK1 1852 2040 643 562 605 605 643 772
PK2 1853 2041 -3600 -1568 -2393 -2393 -3600 -3819
PK3 1854 2042 -1358 -2948 -1335 -1335 -1358 -1357
PK1V 1855 2043 502 202 102 102 502 652
PK2V 1856 2044 -4500 -1811 -914 -914 -4500 -5836
PK3V 1857 2045 0 0 0 0 0 0
PK4V 1858 2046 -8235 -8235 -8235 -8235 -8235 -8235
POA1 1859 2047 843 4657 4150 4150 843 650
BLCMP 1860 2048 0 0 0 0 0 0
DPFMX 1861 2049 0 0 0 0 0 0
POK1 1862 2050 956 956 956 956 956 956
POK2 1863 2051 510 510 510 510 510 510
RESERV 1864 2052 0 0 0 0 0 0
PPMAX 1865 2053 21 21 21 21 21 21
PDDP 1866 2054 3787 1894 1894 1894 3787 3787
PHYST 1867 2055 319 319 319 319 319 319
EMFCMP 1868 2056 0 0 0 0 0 0
PVPA 1869 2057 -2595 -17944 -12039 -12039 -3363 -2088
PALPH 1870 2058 -3200 -2257 -2000 -2000 -3200 -5000
PPBAS 1871 2059 0 0 0 0 0 0
TQLIM 1872 2060 7282 7282 7282 7282 7282 7282
EMFLMT 1873 2061 0 0 0 0 0 0
POVC1 1877 2062 32309 32439 32511 32501 32309 32309
POVC2 1878 2063 5734 4109 3215 3332 5734 5734
TGALMLV 1892 2064 4 4 4 4 4 4
POVCLMT 1893 2065 27346 10559 9565 9912 27346 27346
PK2VAUX 1894 2066 0 0 0 0 0 0
FILTER 1895 2067 0 0 0 0 0 0
FALPH 1961 2068 0 0 0 0 0 0
VFFLT 1962 2069 0 0 0 0 0 0
ERBLM 1963 2070 0 0 0 0 0 0
PBLCT 1964 2071 0 0 0 0 0 0
SFCCML 1965 2072 0 0 0 0 0 0
PSPTL 1966 2073 0 0 0 0 0 0
AALPH 1967 2074 12288 0 4096 4096 12288 12288
OSCTPL 1970 2077 0 0 0 0 0 0
PDPCH 1971 2078 0 0 0 0 0 0
PDPCL 1972 2079 0 0 0 0 0 0
DPFEX 1973 2080 0 0 0 0 0 0
DPFZW 1974 2081 0 0 0 0 0 0
BLENDL 1975 2082 0 0 0 0 0 0
MOFCTL 1976 2083 0 0 0 0 0 0
RTCURR 1979 2086 2893 2576 1977 1977 2893 3187
TDPLD 1980 2087 0 0 0 0 0 0
MCNFB 1981 2088 0 0 0 0 0 0
BLBSL 1982 2089 0 0 0 0 0 0
ROBSTL 1983 2090 0 0 0 0 0 0
ACCSPL 1984 2091 0 0 0 0 0 0
ADFF1 1985 2092 0 0 0 0 0 0
VMPK3V 1986 2093 0 0 0 0 0 0
BLCMP2 1987 2094 0 0 0 0 0 0
AHDRTL 1988 2095 0 0 0 0 0 0
RADUSL 1989 2096 0 0 0 0 0 0
SMCNT 1990 2097 0 0 0 0 0 0
DEPVPL 1991 2098 0 0 0 0 0 0
ONEPSL 1992 2099 400 400 400 400 400 400
INPA1 1993 2100 0 0 0 0 0 0
INPA2 1994 2101 0 0 0 0 0 0
DBLIM 1995 2102 0 0 0 0 0 0
ABVOF 1996 2103 0 0 0 0 0 0
ABTSH 1997 2104 0 0 0 0 0 0
TRQCST 1998 2105 6221 348 819 819 6221 8472
LP24PA 1999 2106 0 0 0 0 0 0
VLGOVR 1700 2107 0 0 0 0 0 0
RESERV 1701 2108 0 0 0 0 0 0
BELLTC 1702 2109 0 0 0 0 0 0
MGSTCM 1703 2110 784 2049 1288 1288 784 267
DETQLM 1704 2111 1510 16720 12830 12830 1510 2218
AMRDML 1705 2112 0 0 0 0 0 0
NFILT 1706 2113 0 0 0 0 0 0
NINTCT 1735 2127 3449 0 1000 2000 3449 3029
MFWKCE 1736 2128 3000 6500 1000 1000 3000 2700
MFWKBL 1752 2129 1291 792 3854 3854 1291 777
LP2GP 1753 2130 0 0 0 0 0 0
LP4GP 1754 2131 0 0 0 0 0 0
LP6GP 1755 2132 0 0 0 0 0 0
PHDLY1 1756 2133 2060 30735 7690 7690 2060 2068
PHDLY2 1757 2134 12820 10270 8990 8990 12820 6410
DGCSMM 1782 2159 0 0 0 0 0 0
TRQCUP 1783 2160 0 0 0 0 0 0
OVCSTP 1784 2161 140 0 140 0 140 140
POVC21 1785 2162 32745 0 32765 32765 32745 32745
POVC22 1786 2163 292 0 34 34 292 292
POVCLMT2 1787 2164 13952 0 6222 6222 13952 13952
MAXCRT 1788 2165 0 25 165 85 0 0
ACCBSLM 2717 2304 2720 0 0 0 2720 0
ACDCEND 2718 2305 4114 0 0 0 4114 22
DCIDBS 2723 2310 0 0 0 0 1236 1112
αiS2000
2000HV
340 449 452 453 454 455
DiS22
1500(200V)
αiS22
6000
αiS22
6000HV
TITLE
αiS2000
2000HV
αiS3000
2000HV
Notice of the update of Digital Servo
Software for Series 0
01
2008.05.21
Ueno
Newly designed
(90B8/L, 90B1/L)
DRAW. No.
B-65270EN/07-006
Date Ed.
Design.
Description
FANUC LTD
i/16i /18i /21i etc.
CUST.
SHEET
7/7
Notice of the Update of Digital Servo Software for Series 30i/31i ( 90D0)
1. Type of applied documents
Name
FANUC AC SERVO MOTOR α
FANUC AC SERVO MOTOR β
FANUC LINEAR MOTOR L
FANUC SYNCHRONOUS BUILT-IN SERVO MOTOR D
PARAMETER MANUAL
Spec. No./Ver. B-65270EN / 07
i series
i series
iS series
iS series
2. Summary of Change
Group
Basic Function
1. Addition of the function setting bit for
Synchronous Built–in Servo Motor D
high-resolution serial output circuit H or C
Name / Outline New, Add
Correct, Del
Add
iS with
Applicable
Date
2008.07
Optional
Function
Unit
Maintenance
Parts
Notice
Correction
Another
01 08.07.04 Tang Newly designed
Ed Date Design Description
TITLE
Notice of the Update of Digital Servo Software
for Series 30i
DRAW. No.
B-65270EN/07-007
/31i (90D0)
CUST.
SHEET
1/4
Notice of the Update of Digital Servo Software for Series 30i/31i ( 90D0)
1. Update Edition
ROM series New edition Available CNC
90D0 21
FS30i /31i (For HRV4 control)
2. Contents of change
- The function setting bit for Synchronous Built–in Servo Motor DiS with
high-resolution serial output circuit H or C has been added.
3. Attachment
Attached 1 Addition of the function setting bit for Synchronous Built–in Servo Motor D
high-resolution serial output circuit H or C
iS with
01 08.07.04 Tang Newly designed
Ed Date Design Description
TITLE
Notice of the Update of Digital Servo Software
for Series 30i
DRAW. No.
/31i (90D0)
CUST.
B-65270EN/07-007
SHEET
2/4
Attached 1. Addition of the function setting bit for Synchronous Built–in
Servo Motor DiS with high-resolution serial output circuit H or C
(1) Outline
The function bit for 2048-magnification interpolation circuit has been supported to an analog output
type rotary encoder (using for Synchronous Built-in Servo Motor ), which connects with
high-resolution serial output circuit H (A860-0333-T701)or C(A860-0333-T801).
(2) Available Servo software
90D0 series version U(21) and subsequent editions (Series 30i, 31i,)
(3) Parameters
Please use the function bit to an analog output type rotary encoder with 2n pulse per motor
revolution, when it connects with high-resolution serial output circuit H or C.
Both HP2048 and DD2048 bits need to be set to 1 in the case of using Synchronous Built-in Servo
Motor. And the setting value of FFG, position pulse and velocity pulse are same as the case of using
512-magnification interpolation circuit.
#7 #6 #5 #4 #3 #2 #1 #0
2274 (FS30i)
HP2048(#0) The 2048-magnification interpolation circuit is
DD2048(#6) For D
(Magnification to be used at parameter setting)
No.2274#6
(DD2048)
No.2274#0
(HP2048)
DD2048 HP2048
0: Not used
1: Used
iS motors, HP2048 is
0: Not available
1: Available
Interpolation magnification as high-resolution
serial output circuit H or circuit C is used
D
iS Motor LiS Motor
0 0 x 2048
0 1
1 1 x 512
01 08.07.04 Tang Newly designed
Ed Date Design Description
x 2048
x 512
TITLE
Notice of the Update of Digital Servo Software
for Series 30i
DRAW. No.
/31i (90D0)
CUST.
B-65270EN/07-007
SHEET
3/4
 Loading...
Loading...