

Page 1
Operating and Programming 01/2002 Edition
Milling
SINUMERIK 802S/802C
Page 2

Page 3
SINUMERIK 802S
Introduction 1
Power ON 2
SINUMERIK 802C
Operation and Programming
Milling
Setup 3
Manually Controlled
Operation
Automatic Mode 5
Part Programming 6
4
Valid for
Control System Software Version
SINUMERIK 802S 3
SINUMERIK 802C 3
01.2002 Edition
Services and Diagnosis 7
Programming 8
Cycles 9
Page 4

3ls
SINUMERIKDocumentation
Printing history
Brief details of this edition and previous editions are listed below.
IThe status of each edition is shown by the code in the ”Remarks” column.
Status code in the “Remarks” column:
A New documentation.. . . . .
B Unrevised reprint with new Order No.. . . . .
C Revised edition with new status. . . . . .
If actual changes have been made on the page since the last edition,
this is indicated by a new edition coding in the header on the page.
Edition Order–No. Remark
02.99 6FC5598–2AA10–0BP1 A
04.00 6FC5598–3AA10–0BP1 C
01.02 6FC5598–3AA10–0BP2 C
This Manual is included on the documentation on CD–ROM (DOCONCD)
Edition Order–No. Remark
11.02 6FC5298–6CA00–0BG3 C
Trademarks
SIMATICr, SIMATIC HMIr, SIMATIC NETr, SIROTECr, SINUMERIKr and SIMODRIVEr are registered
trademarks of Siemens. Third parties using for their own purposes any other names in this document which
refer to trademarks might infringe upon the rights of trademark owners.
This publication was produced with Interleaf V 7
The reproduction, transmission or use of this document or its
contents is not permitted without express written authority. Offenders
will be liable for demages. All rights, including rights created by patent
grant or registration of utility model or design, are reserved.
Siemens AG 2002. All rights reserved.
Printed in the Federal Republic of Germany
Other functions not described in this documentation might be
executable in the control. This does not, however, represent an
obligation to supply such functions with a new control or when
servicing.
We have checked that the contents of this document correspond to
the hardware and software described. Nonetheless, differences might
exist and therefore we cannot guarantee that they are completely
identical. The information contained in this document is, however,
reviewed regularly and any necessary changes will be included in the
next edition. We welcome suggestions for improvement.
Subject to change without prior notice.
Siemens–AktiengesellschaftBestell–Nr. 6FC5598–3AA10–0BP2
Page 5
Safety notices
!
!
!
This Manual contains notices intended to ensure your personal safety and to avoid material damage. The notices
are highlighted by a warning triangle and, depending on the degree of hazard, represented as shown below:
Danger
indicates that loss of life, severe personal injury or substantial material damage will result if the appropriate pre-
cautions are not taken.
Warning
indicates that loss of life, severe personal injury or substantial material damage may result if the appropriate pre-
cautions are not taken.
Caution
indicates that minor personal injury or material damage may result if the appropriate precautions are not taken.
Caution
without a warning triangle means that a material damage can occur if the appropriate precau-
tions are not taken.
Attention
means that an undesirede event or status can occur if the appropriate note is not observed.
Note
is used to draw your special attention to an important information on the product, the handling of the product or the
corresponding part of the documentation.
Qualified personnel
Start–up and operation of a device may only be carried out by qualified personnel. Qualified personnel as referred to in the safety notices provided in this Manual are persons who are authorized to start up, ground and tag
devices, systems and circuits according to the relevant safety standards.
Usage as per intended purpose
Please observe the following:
Warning
!
The device may only be used for the cases of application, as intended by the Catalog, and only in conjunction with
third–party devices and components recommended or approved by Siemens.
The proper and safe operation of the product requires transport, storage and installation according to the relevant
instructions and qualified operation and maintenance at the prescribed intervals.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
v
Page 6

Table of Contents
1 Introduction 1-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Screen Layout 1-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Operating areas 1-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Overview of the most important softkey functions 1-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Pocket calculator 1-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5 Basic principles 1-22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Turning On and Reference Point Approach 2-25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Setup 3-27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Entering tools and tool offsets 3-27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Creating a new tool 3-28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Tool compensation data 3-29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Determining the tool offsets 3-30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5 Entering/modifying zero offsets 3-32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.6 Determining the zero offset 3-34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.7 Programming the setting data – “Parameters” operating area 3-36. . . . . . . . . . . . . . . . . . . . . . . .
3.8 R parameters - “Parameters” operating area 3-38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Manually Operated Mode 4-39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Jog mode - ”Machine” operating area 4-39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1.1 Assigning handwheels 4-41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 MDA Mode (Manual Data Input) - “Machine” operating area 4-43. . . . . . . . . . . . . . . . . . . . . . . . .
5 Automatic Mode 5-45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Selecting/starting a part program - “Machine” operating area 5-48. . . . . . . . . . . . . . . . . . . . . . . .
5.2 Block search - “Machine” operating area 5-49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Stopping/cancelling a part program - “Machine” operating area 5-49. . . . . . . . . . . . . . . . . . . . . .
5.4 Repositioning after interruption 5-50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5 Program execution from external (V.24 interface) 5-51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6 Teach In 5-52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Part Programming 6-55. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Entering a new program - “Program” operating area 6-57. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Editing part programs - “Program” operating area 6-58. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Programming support 6-61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.1 Vertical menu 6-61. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.2 Cycles 6-62. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.3 Contour 6-63. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.4 Free softkey assignment 6-79. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 Services and Diagnosis 7-81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1 Data transfer via the V24 Interface 7-81. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1.1 Interface parameters 7-84. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1.2 Special functions 7-85. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1.3 Interface parameterization 7-85. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
vi
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 7

7.2 Diagnosis and start–up - ”Diagnostics” operating area 7-87. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8 Programming 8-99. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1 Fundamentals of NC programming 8-99. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1.1 Program structure 8-99. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1.2 Word structure and address 8-100. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1.3 Block structure 8-100. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1.4 Character set 8-102. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1.5 Overview of instructions 8-104. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2 Position data 8-114. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2.1 Plane selection: G17 to G19 8-114. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2.2 Absolute/incremental dimensions: G90, G91 8-115. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2.3 Metric/inch dimensions: G71, G70 8-116. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2.4 Programmable zero offset and rotation: G158, G258, G259 8-117. . . . . . . . . . . . . . . . . . . . . . . . .
8.2.5 Workpiece clamping – settable zero offset:
G54 to G57, G500, G53 8-119. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3 Axis movements 8-121. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.1 Linear interpolation at rapid traverse: G0 8-121. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.2 Linear interpolation at feedrate: G1 8-122. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.3 Circular interpolation: G2, G3 8-123. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.4 Circular interpolation via intermediate point: G5 8-126. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.5 Thread cutting with constant lead: G33 8-127. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.6 Tapping with compensating chuck: G63 8-128. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.7 Thread interpolation: G331, G332 8-129. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.8 Fixed–point approach: G75 8-131. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.9 Reference point approach: G74 8-131. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.10 Feedrate F 8-131. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.11 Feed overrride for circles: G900, G901 8-132. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.12 Exact stop / continuous–path operation: G9, G60, G64 8-133. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.13 Dwell time: G4 8-136. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.4 Spindle movements 8-137. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.4.1 Spindle speed S, directions of rotation 8-137. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.4.2 Spindle speed limitation: G25, G26 8-137. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.4.3 Spindle positioning: SPOS 8-138. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.5 Rounding, chamfer 8-139. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.6 Tool and tool offset 8-141. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.6.1 General notes 8-141. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.6.2 Tool T 8-142. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.6.3 Tool offset number D 8-142. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.6.4 Selection of tool radius offset: G41, G42 8-146. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.6.5 Behavior at corners: G450, G451 8-148. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.6.6 Tool radius compensation OFF: G40 8-149. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.6.7 Special cases of tool radius compensation 8-151. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.6.8 Example of tool radius compensation 8-153. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.7 Miscellaneous function M 8-154. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.8 Arithmetic parameters R 8-155. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.9 Program branches 8-157. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.9.1 Labels – destination for program branches 8-157. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.9.2 Unconditional program branches 8-157. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.9.3 Conditional branches 8-158. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.9.4 Example of program with branches 8-160. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.10 Subroutine technique 8-161. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9 Cycles 9-165. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1 General information about standard cycles 9-165. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1.1 Overview of cycles 9-165. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
vii
Page 8

9.1.2 Error messages and error handlingin cycles 9-166. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2 Drilling cycles 9-168. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2.1 Drilling, spot facing – LCYC82 9-168. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2.2 Deep hole drilling – LCYC83 9-170. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2.3 Tapping without compensating chuck – LCYC84 9-174. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2.4 Tapping with compensating chuck – LCYC840 9-176. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2.5 Boring – LCYC85 9-179. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3 Drilling patterns 9-181. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3.1 Drilling a row of holes – LCYC60 9-181. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3.2 Hole circle – LCYC61 9-185. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.4 Milling cycles 9-187. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.4.1 Cutting square pockets, slots and circular pockets – LCYC75 9-187. . . . . . . . . . . . . . . . . . . . . . . .
viii
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 9
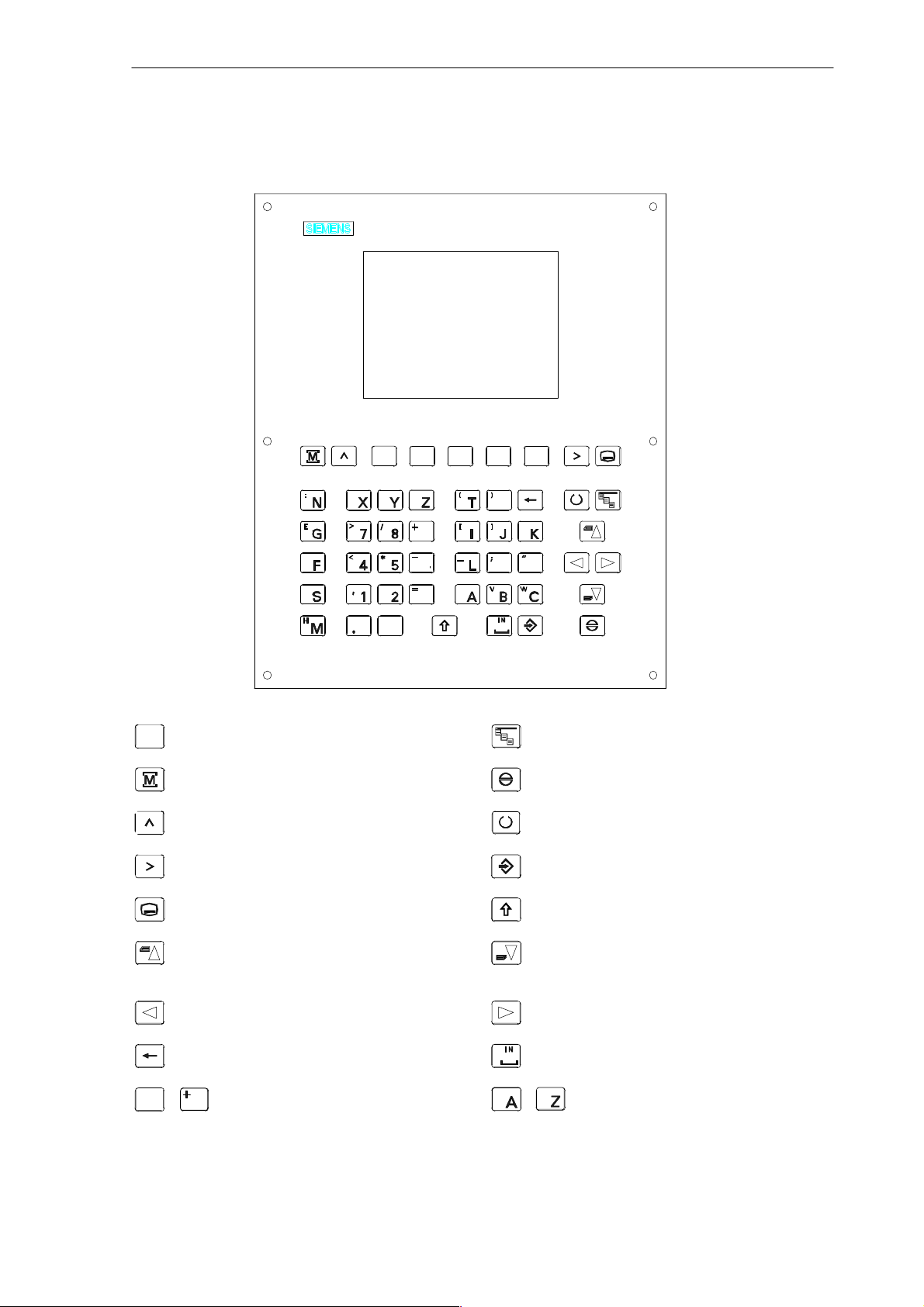
SINUMERIK 802S Slimline Operator Panel OP
D
9
O
Q
6
3
$
0
P
R
U
S
Softkey
Machine area key
Recall key
ETC key
Area switchover key
Cursor UP
with shift: page up
Cursor LEFT
S
Delete key (backspace)
$
0
9
Numerical keys
shift for alternative assignment
U
Alphanumeric keys
Vertical menu
Acknowledge alarm
Selection key/toggle key
ENTER / input key
Shift key
Cursor DOWN
with shift: page down
Cursor RIGHT
SPACE (INSERT)
shift for alternative assignment
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
ix
Page 10
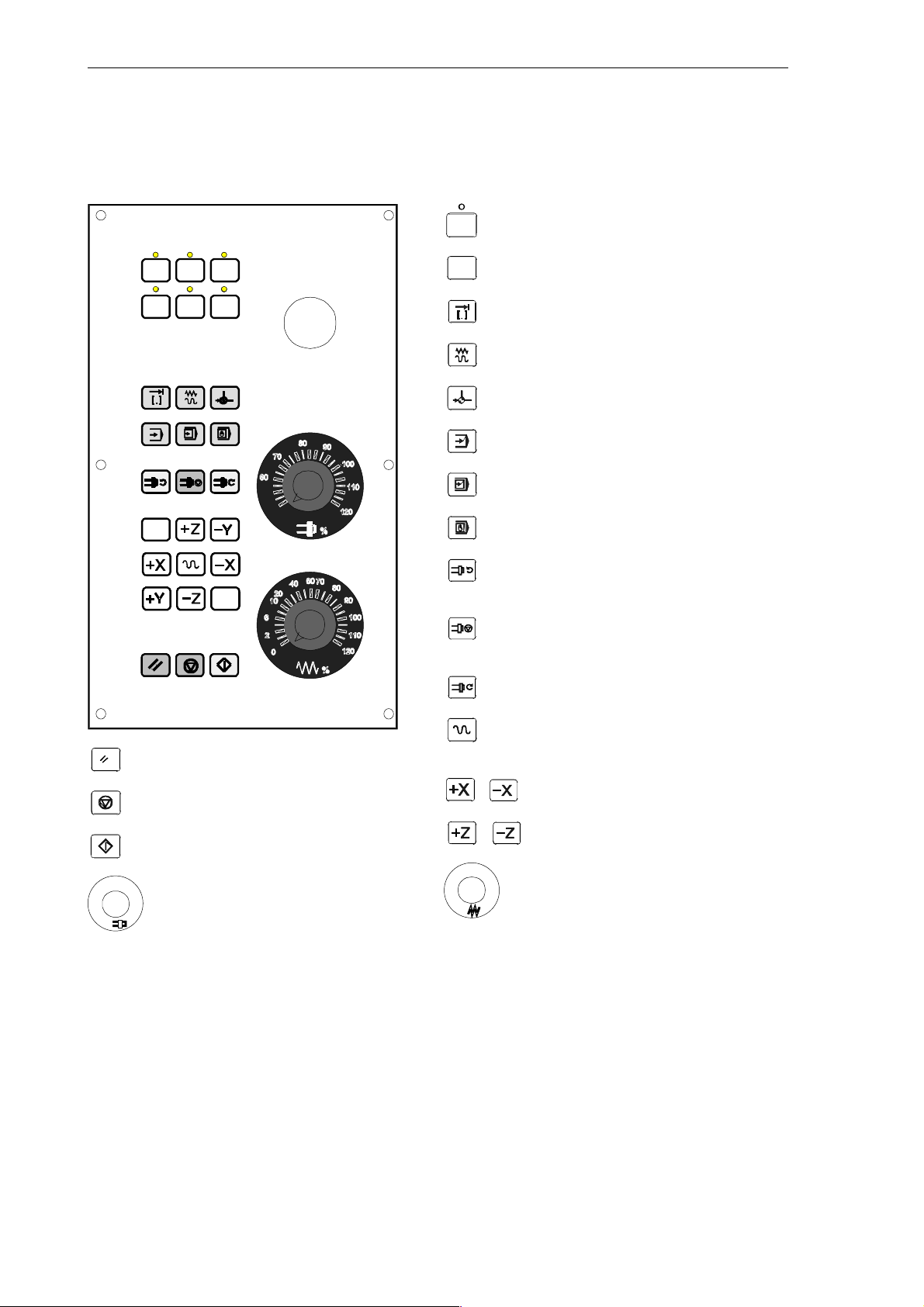
External Machine Control Panel
User–defined key with LED
User–defined key without LED
INCREMENT
JOG
REFERENCE POINT
AUTOMATIC
SINGLE BLOCK
MANUAL DATA
SPINDLE START LEFT
Counterclockwise direction
SPINDLE START RIGHT
Clockwise direction
SPINDLE STOP
RAPID TRAVERSE OVERLAY
RESET
NC STOP
X axis
NC START
Z axis
%
%
Spindle Speed Override
Feed Rate Override
(optional)
x
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 11
Introduction
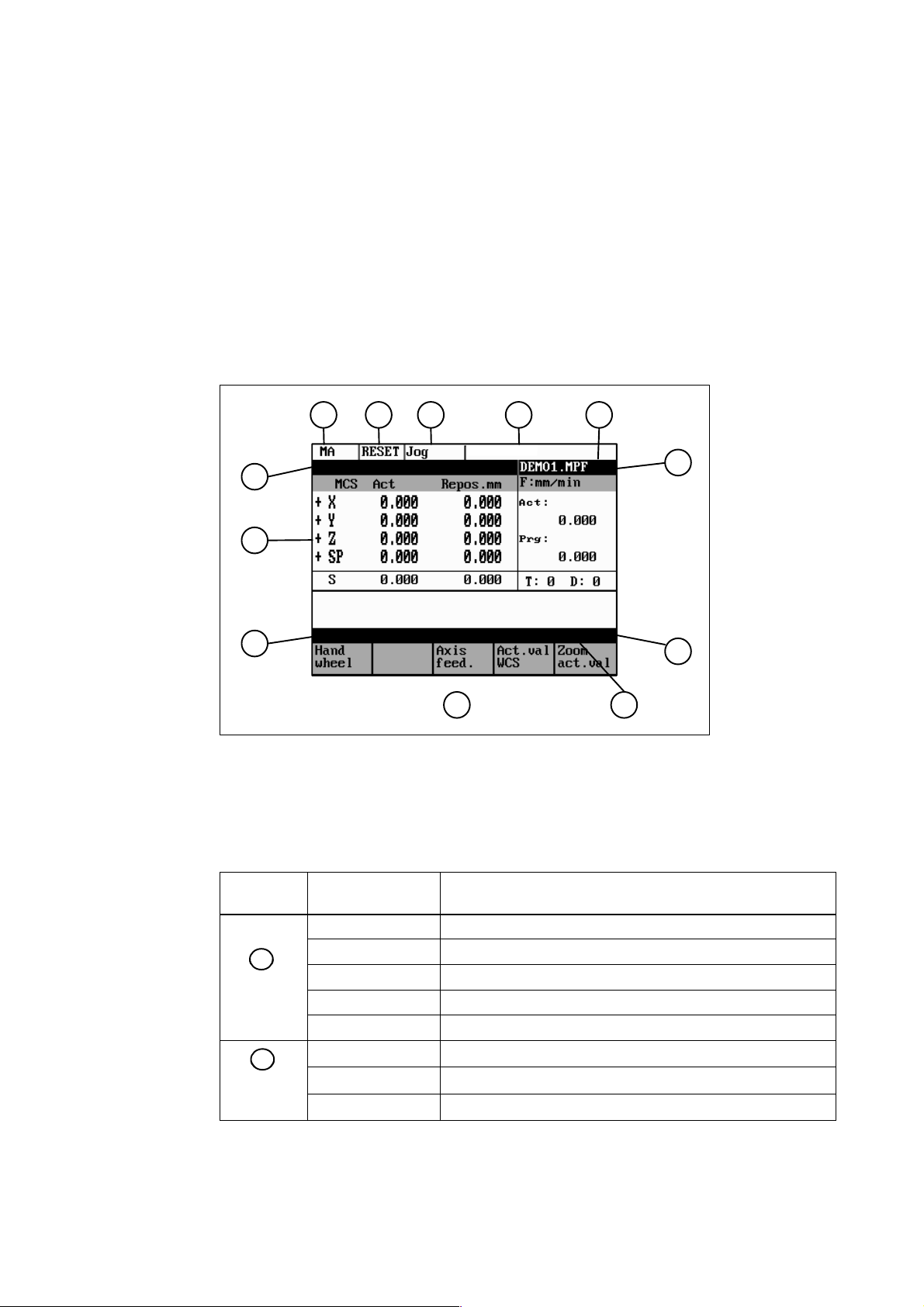
1.1 Screen Layout
1
1 2 3 4
5
8
9
11
Fig. 1-1 Screen layout
The abbreviations on the screen stand for the following:
Table 1-1 Explanation of display elements
7
6
10
12
Display
Element
1
1
Active operating area
2
2
Program
status
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
Abbreviation Meaning
MA Machine
PA Parameter
PR Programming
DI Services
DG Diagnosis
STOP Programm stopped
RUN Program running
RESET Program aborted
1-11
Page 12
Introduction
1.1 Screen Layout
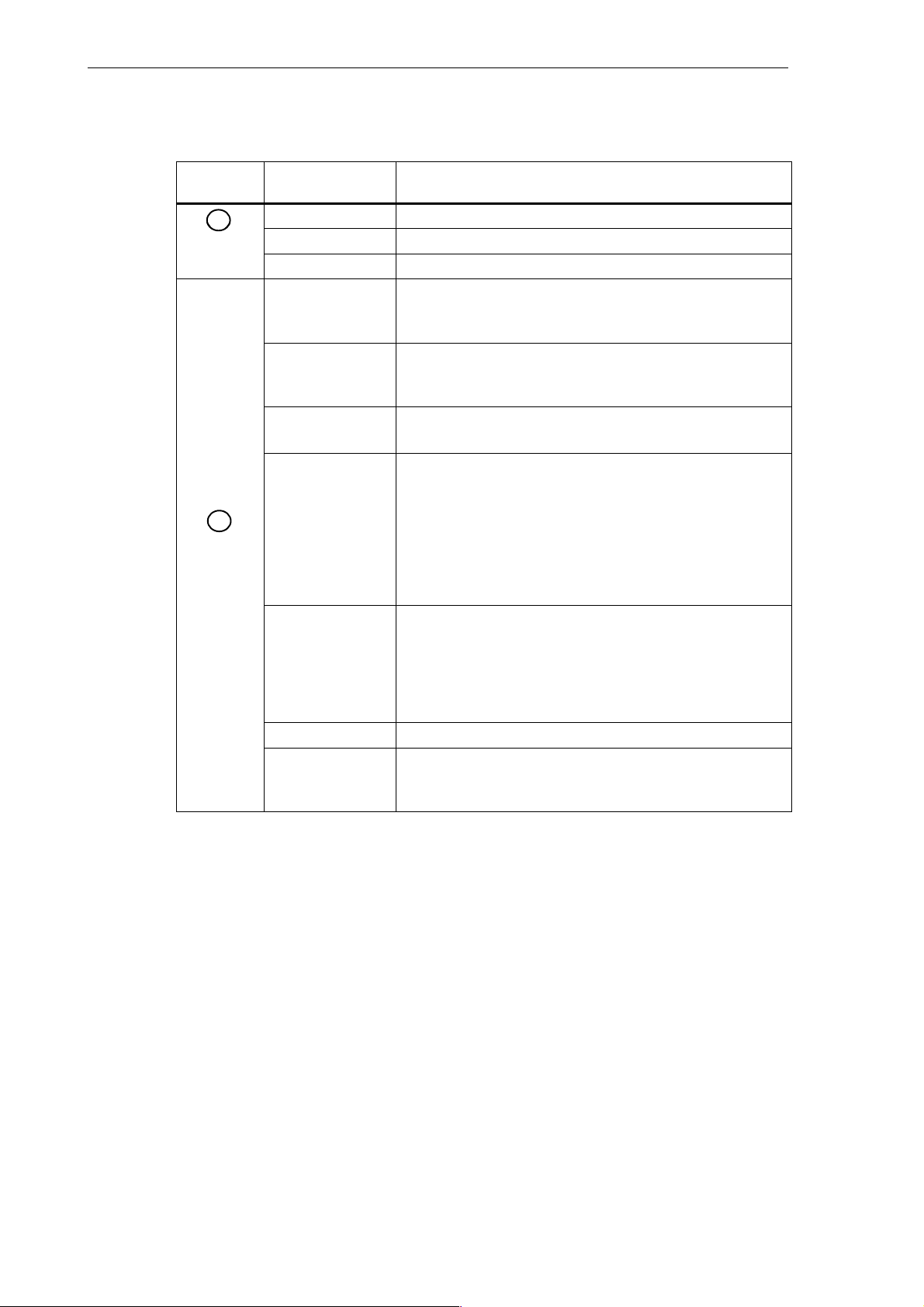
Table 1-1 Explanation of display elements
Display
Element
3
3
Operating
mode
4
Status
display
MeaningAbbreviation
Jog Manual traverse
MDA Manual input with automatic function
Auto Automatic
SKP Skip block
Program blocks marked by a slash in front of the block
number are ignored during program execution.
DRY Dry run feed
Traversing movements are executed at the feed specified
in the Dry Run Feed setting data.
ROV Rapid traverse override
The feed override also applies to rapid feed mode.
SBL Single block with stop after each block
When this function is active, the part program blocks are
processed separately in the following manner:
Each block is decoded separately, the program is stopped
at the end of each block. The only exception are thread
blocks without dry run feed. In this case, the program is
stopped only when the end of the current thread block is
reached. SBL can only be selected in the RESET state.
M1 Programmed stop
When this function is active, the program is stopped at
each block in which the miscellaneous function M01 is
programmed.
In this case, the message “5 stop M00/M01 active“ appears on the screen.
PRT Program test
1...1000 INC Incremental mode
If the control is in the Jog mode, incremental dimension is
displayed instead of the active program control function.
1-12
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 13
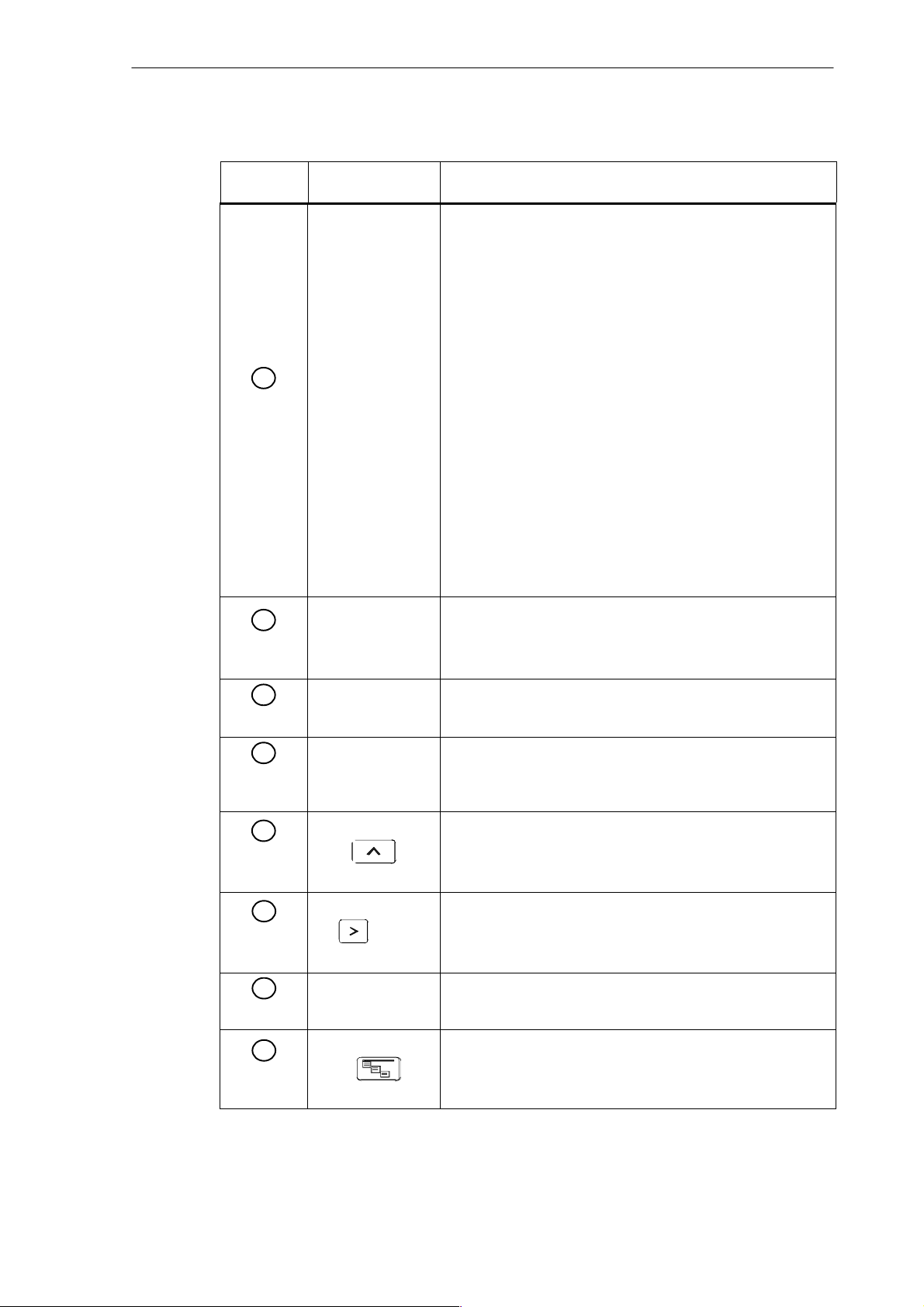
Table 1-1 Explanation of display elements
Introduction
1.1 Screen Layout
Display
Element
5
Operational
messages
6
10
11
12
13
14
15
16
17
18
19
20
21
22
23
MeaningAbbreviation
1
2
3
4
5
6
7
8
9
Stop: No NC Ready
Stop: EMERGENCY STOP active
Stop: Alarm active with stop
Stop: M0/M01 sctive
Stop: Block ended in SBL mode
Stop: NC STOP active
Wait: Read–in enable missing
Wait: Feed enable missing
Wait: Dwell time active
Wait: Auxiliary function acknowl. missing
Wait: Axis enable missing
Wait: Exact stop not reached
Wait: For spindle
Wait: Feed override to 0%
Stop: NC block incorrect
Wait: Block search active
Wait: No spindle enable
Wait: Axis feed value 0
Program
name
7
Alarm line
8
Working
window
9
Recall
symbol
10
Menu
extension
11
Softkey bar
12
Vertical
menu
The alarm line is only displayed if an NC or PLC alarm is active. The alarm line contains the alarm number and reset criterion of the most recent alarm.
Working window and NC display
This symbol is displayed above the softkey bar when the operator is in a lower–level menu.
When the Recall key is pressed, you can return to the next–
higher menu without saving data.
ETC is possible
If this symbol appears above the softkey bar, further menu
functions are provided. These functions can be activated
by the ETC key.
If this symbol is displayed above the softkey bar, further menu
functions are provided. When the VM key is pressed, these
functions appear on the screen and can be selected by Cursor UP and Cursor DOWN.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
1-13
Page 14
Introduction
1.2 Operating areas
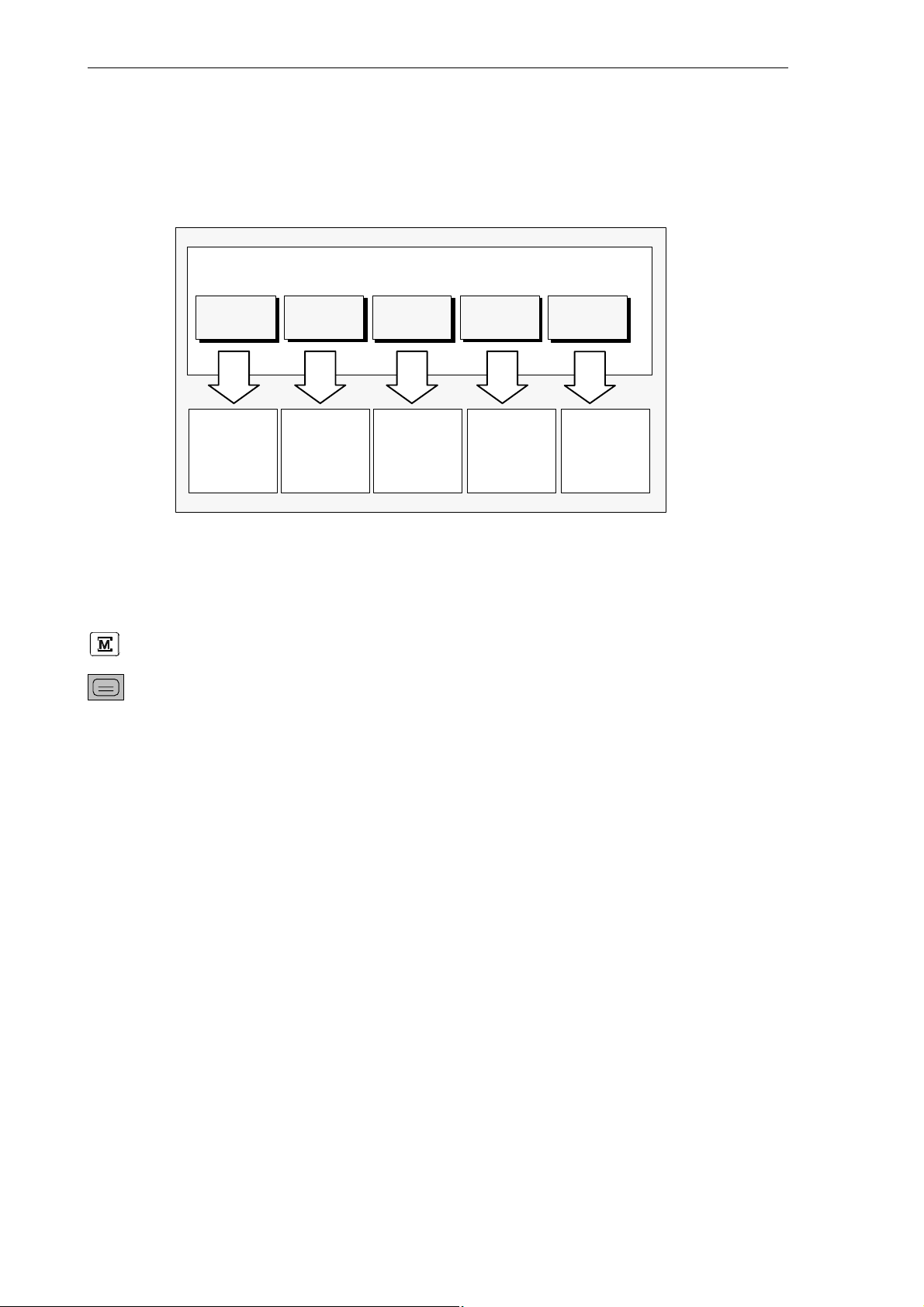
1.2 Operating areas
The basic functions are grouped in the CNC into the following operating areas:
Operating areas
Machine Parameter Program Services
Executing
part programs
Manual
control
Fig. 1-2 SINUMERIK 802S operating areas
Editing program data
Switching between the operating areas
Press the “Machine area” key for direct access to the “Machine” operating area.
Use the area switching key to return from any operating area to the main menu.
Press the area switching key twice to return to the previous operating area.
After turning on the control system, you will always find yourself in the
Machine operating area.
Creating
part programs
Data
import /
export
Diagnosis
Alarm display
Start–up
Protection levels
Sensible points of the control system are password–protected against entering and modifying
data.
However, the operator can alter the classes of protection in the “Machine data display” menu
in the “Diagnosis” operating area.
Default: protection level 3.
In the following menus, entering and modifying data depends on the set protection class:
S tool offsets
S zero offsets
S setting data
S V24 setting
1-14
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 15
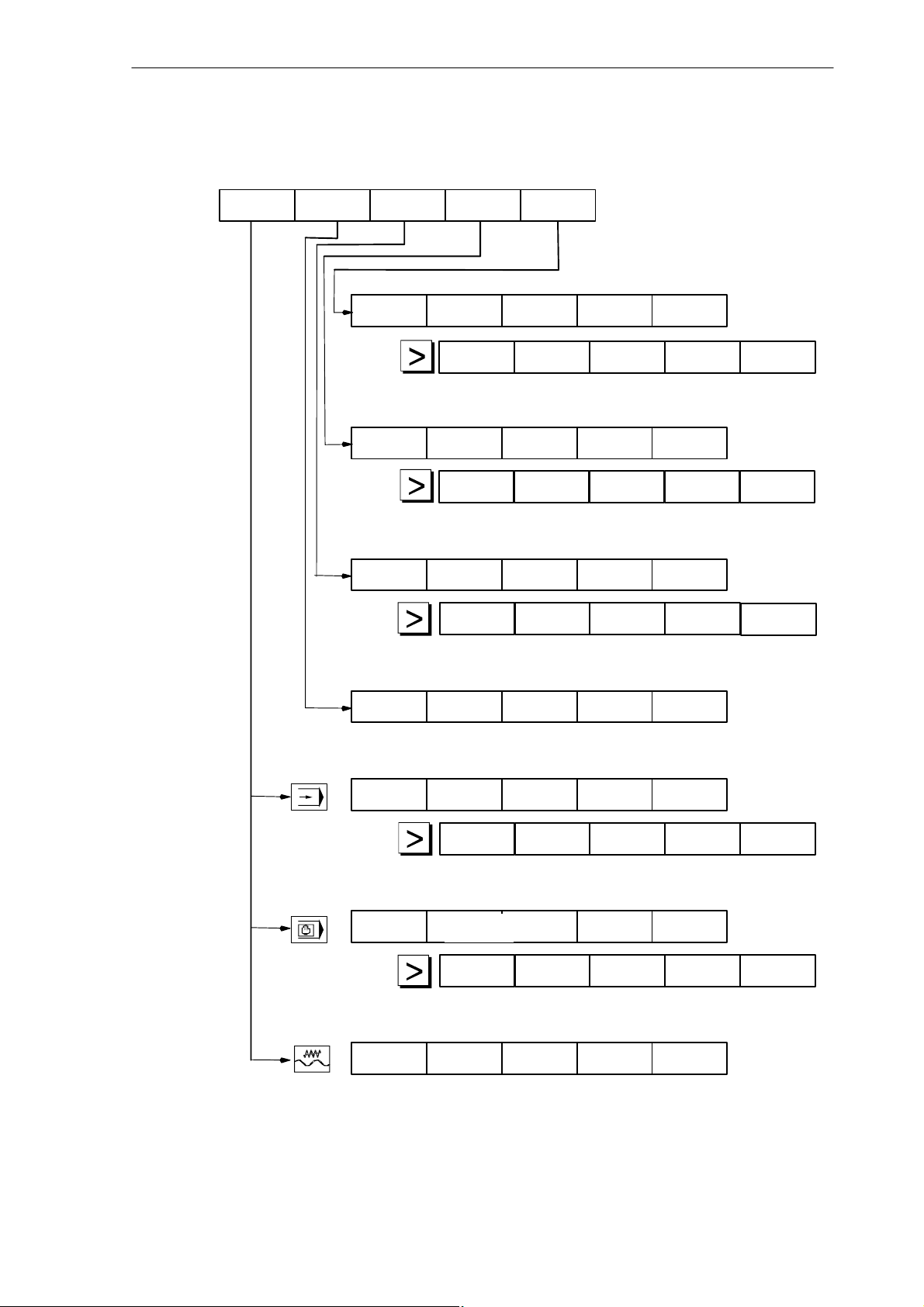
1.3 Overview of the most important softkey functions
1.3 Overview of the most important softkey functions
Introduction
Machine
Parameters Program
Alarms
Data Data
in out
Progr.
Services
Service
display
Display Display
bright. darker
RS232
setting
Execut
f. ext.
Cycles
New Copy
Diagnosis
Start–up
Change
lang.
Error
log
Selection
Delete Rename
Machine
data
Show
Open
Memory
info
R Tool Setting Zero
parameters offset data
Program
control WCS act.val.
Zoom
block
Axis
feed
Block
search
Zoom
block
Axis
feed
Handwheel
Axis
feed
Execut
f. ext.
offset
Act.val. Zoom
Zoom
G funct.
Act.val.
WCS
Zoom
act. val.
Zoom
G funct.
Act.val.
WCS/MCS
Zoom
act.val.
Zoom
M funct.
Zoom
M funct.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
1-15
Page 16
Introduction
1.4 Pocket calculator
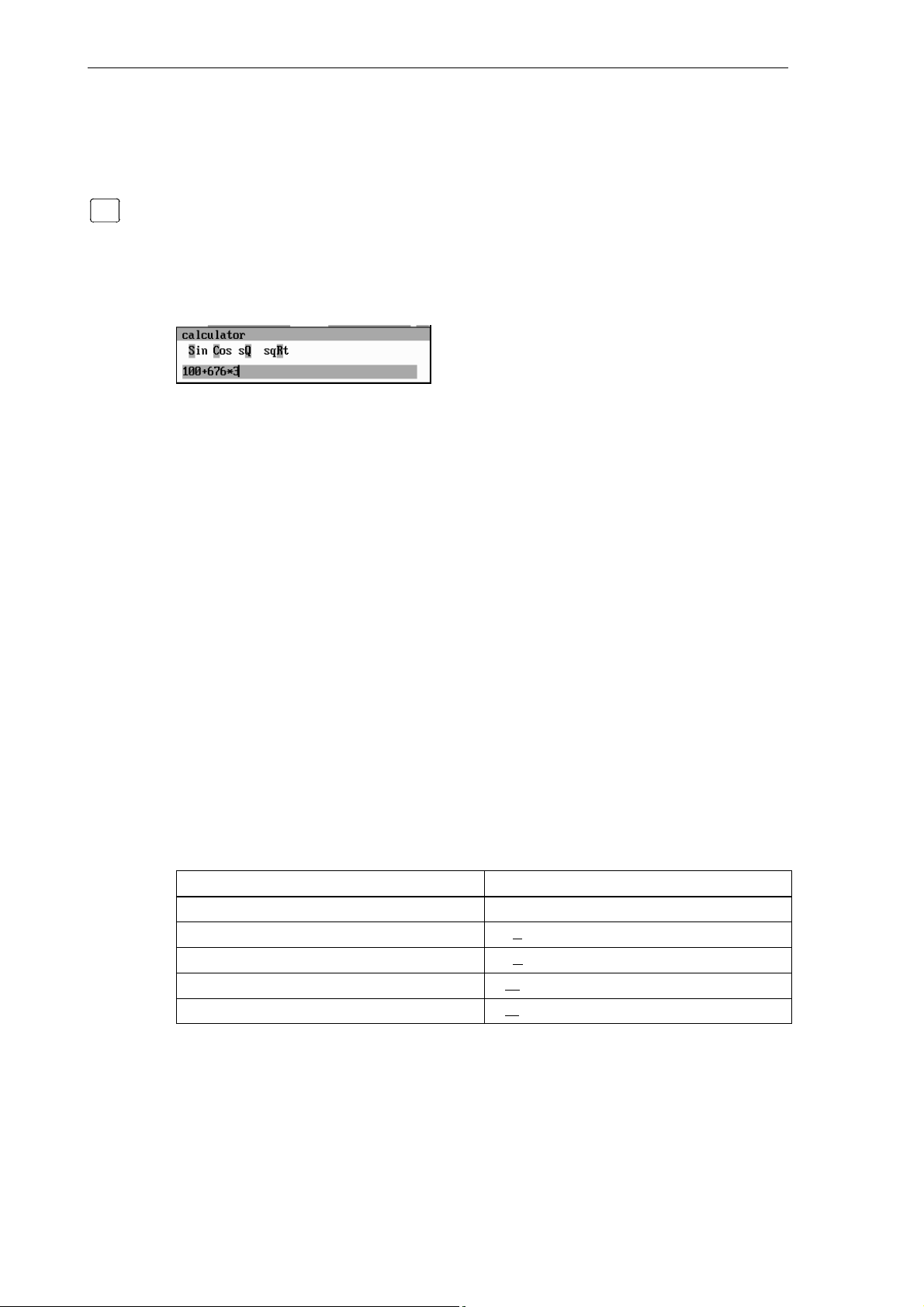
1.4 Pocket calculator
=
3
This function can be activated for all input fields intended for entry of numerical values by means of
the “=” character. To calculate the required value, you can use the four basic arithmetic operations,
and the functions sine, cosine, squaring, as well as the square root function.
If the input field is already loaded with a value, this function writes the value in the input line of
the pocket calculator.
Fig. 1-3 Pocket calculator
Permissible character
The following characters are permitted for input:
+ Value X plus value Y
– Value X minus value Y
* Value X multiplied with value Y
/ Value X divided by value Y
S Sine function
The value X in front of the input cursor is replaced by the value sin(X).
C Cosine function
The value X in front of the input cursor is replaced by the value cos(X).
Q Square function
The value X in front of the input cursor is replaced by the value X
R Square root function
The value X in front of the input cursor is replaced by the value √X.
Calculation examples
100 + (67*3) 100+67*3
sin(45_) 45 S –> 0.707107
cos(45_) 45 C –> 0.707107
2
4
√4 4 R –> 2
The calculation is carried out when the Input key is pressed. The function writes the result to
the input field and automatically closes the pocket calculator.
2.
Task Input
4 Q –> 16
1-16
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 17
Softkeys
Introduction
1.4 Pocket calculator
To calculate auxiliary points on a contour, the pocket calculator provides the following functions:
S calculating the tangential transition between a circle sector and a straight line
S moving a point in a plane
S converting polar coordinates into Cartesian coordinates
S adding the second end point of a contour section ’straight line – straight line’ given via an-
gular interrelation.
These functions are directly linked with the input fields of the programming support. Any values in this input field are written by the pocket calculator into the input line, and the result is
automatically copied into the input fields of the programming support.
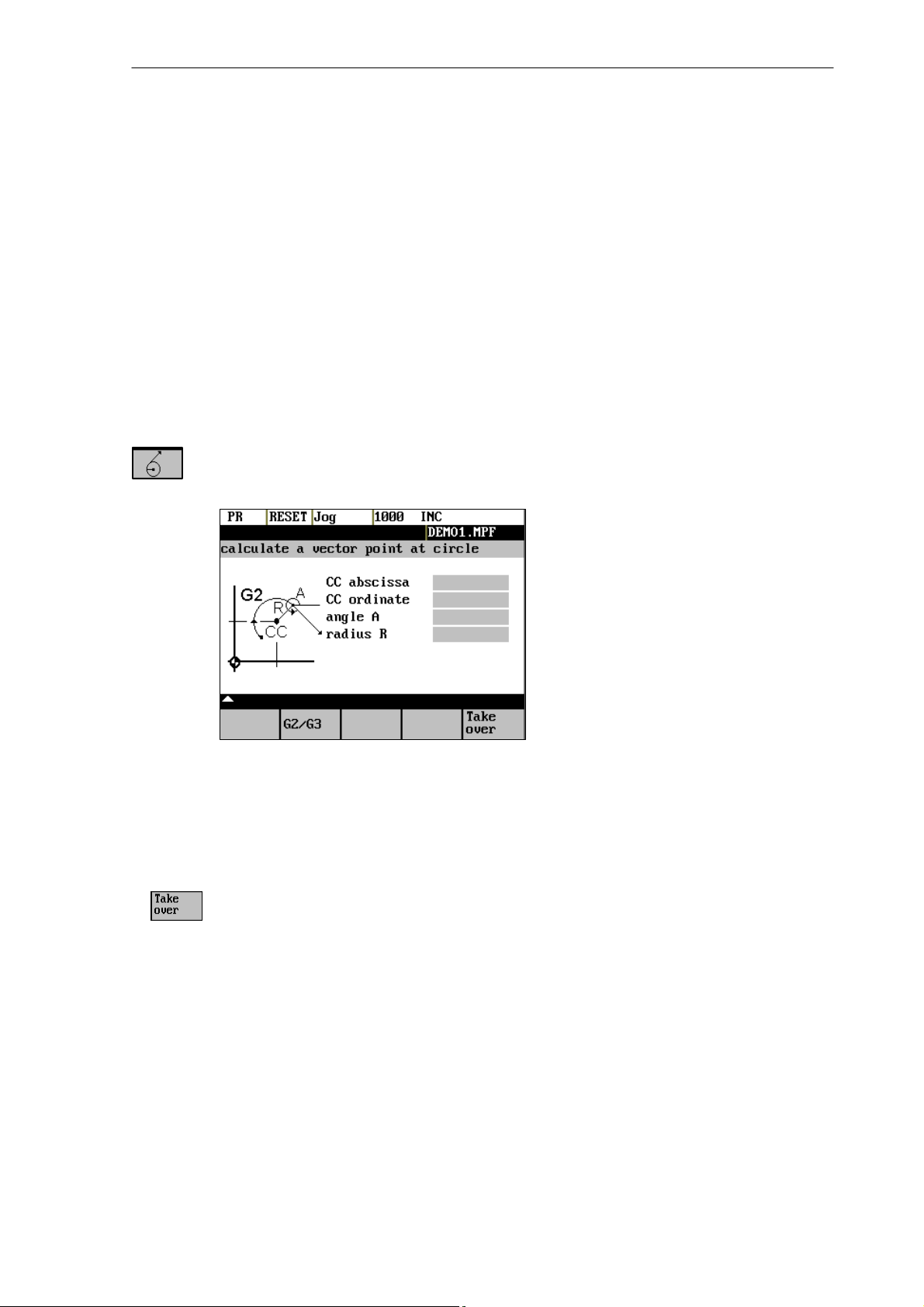
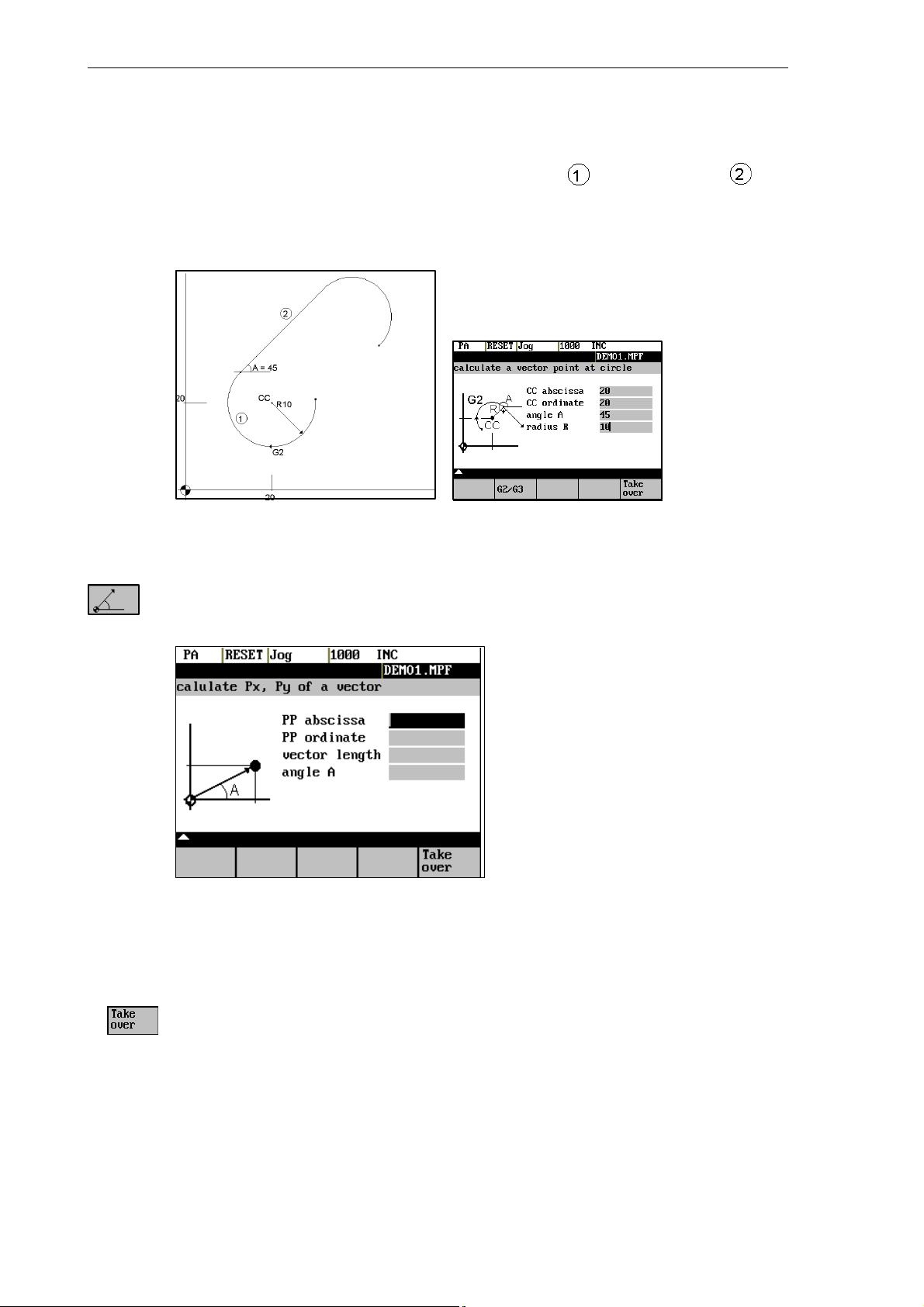
This function is used to calculate a point on a circle. The point results from the angle of the created
tangent and the direction of rotation of the circle.
Fig. 1-4 Calculation of a point on a circle
Enter the circle center, the angle of the tangent and the radius of the circle.
Use the softkeys G2 / G3 to define the direction of rotation of the circle.
The values of abscissa and ordinate are calculated. The abscissa is the first axis of the plane, and
the ordinate the second axis of the plane.
Example
If plane G17 is active, the abscissa is the X axis, and the ordinate the Y axis.
The value of the abscissa is copied into that input field from which the pocket calculator function has been called, and the ordinate value into the next following input field.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
1-17
Page 18
Introduction
1.4 Pocket calculator
Example
Calculating the intersection point between the circle sector and the straight line .
Given: Radius: 10
Circle center point: X 20 Y20
Ongoing angle of the straight line: 45°
Result: X = 12.928
Y = 27.071
The function calculates the Cartesian coordinates from a straight line specified by length and rise
angle.
Fig. 1-5 Conversion of the polar coordinates into Cartesian coordinates
Enter the pole point (PP) as both an abscissa and ordinate value, the length and the rise angle of the straight line.
1-18
The values of abscissa and ordinate are calculated.
The abscissa value is copied into the input field from which the pocket calculator function has
been called, and the ordinate value into the next following input field.
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 19
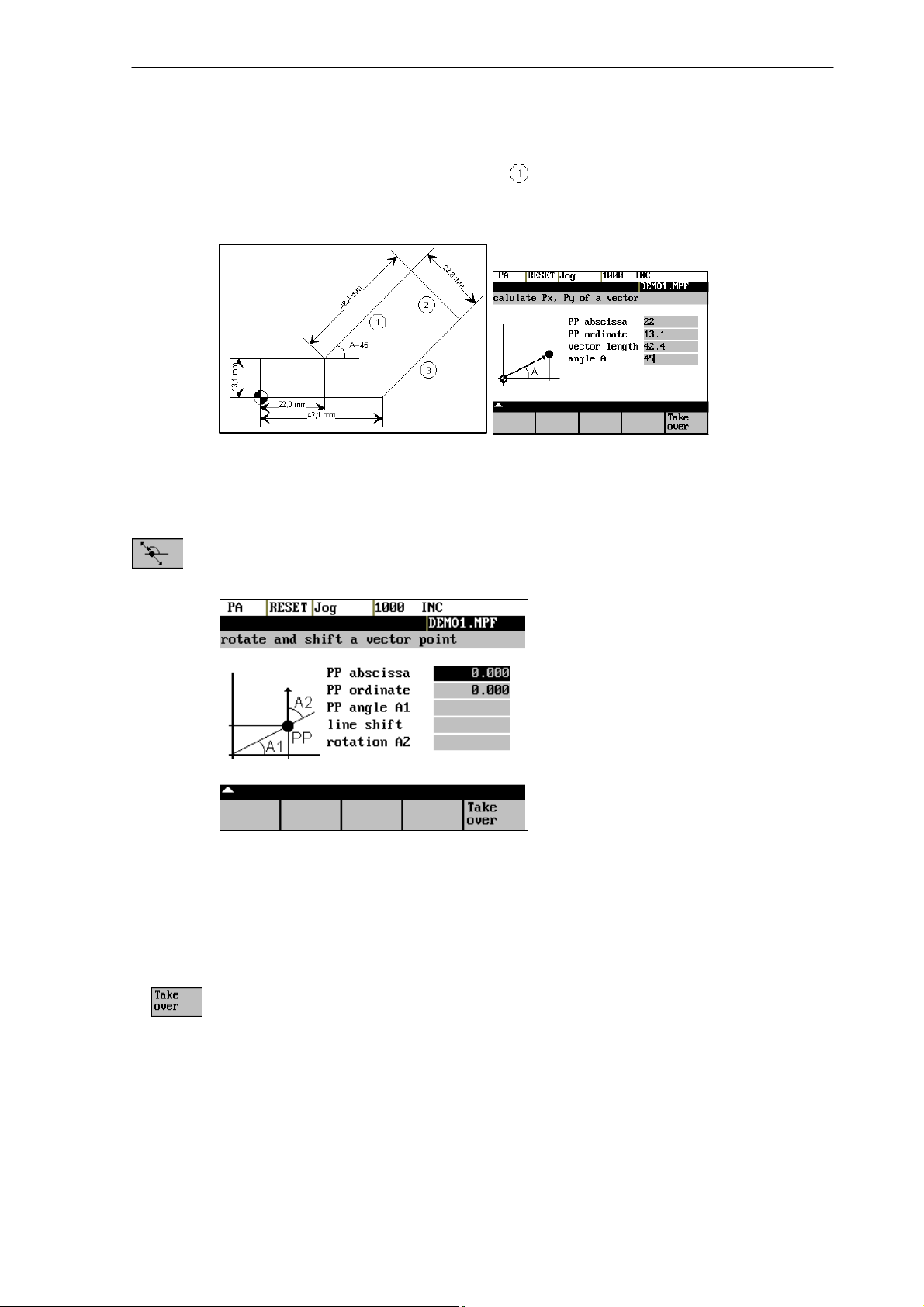
Example
Introduction
1.4 Pocket calculator
Calculating the end point of the straight line . The straight line is defined by the angle
° uand its length..
A=45
Result: X = 51.981
Y = 43.081
This function can be used to move a point in the plane. The point is on a straight line defined by its
rise angle.
Fig. 1-6 Moving a point in the plane
Enter the rise angle of the straight line and the coordinates of the point.
Enter line shift and rotation of the point with refer to the straight line in the fields “line shift” and
“rotation”.
The values of abscissa and ordinate are calculated.
The pocket calculator copies the abscissa value into the input field from which the pocket calculator function has been called, and the ordinate value into the next following input field.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
1-19
Page 20
Introduction
1.4 Pocket calculator
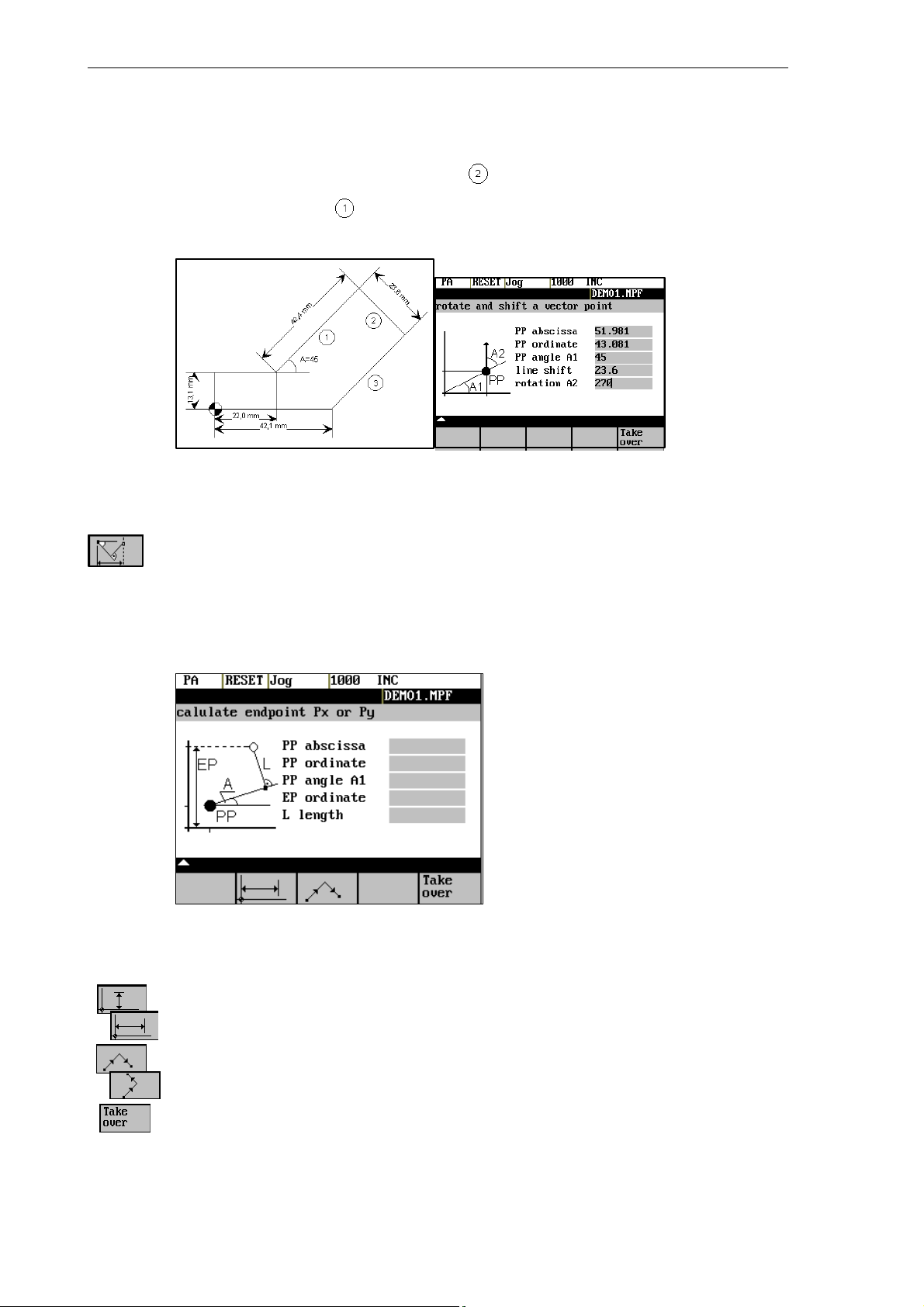
Example
Calculating the end point of the straight line . The straight line stands vertical on the end
point of the straight line (coordinates: X = 51.981, Y = 43.081). The length of the straight
line is also given.
Result: X = 68.668
Y = 26.393
This function calculates the missing end point of the contour section straight line – straight line,
with the second straight line standing vertically on the first straight line.
The following values of the straight line are known:
Straight line 1: Starting point and rise angle
Straight line 2: Length and one end point in the Cartesian coordinate system
Fig. 1-7
1-20
This function chooses the given coordinate of the end position.
The value of ordinate and/or abscissa is given.
The second straight line is rotated in clockwise direction or, with refer to the first straight line, rotated
by 90 degrees in counter–clockwise direction. The function chosses the appropriate setting.
The missing end position is calculated. The value of the abscissa is copied into that input field from
which the pocket calculator function has been called, and the ordinate value into the next following
input field.
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 21
Example
Introduction
1.4 Pocket calculator
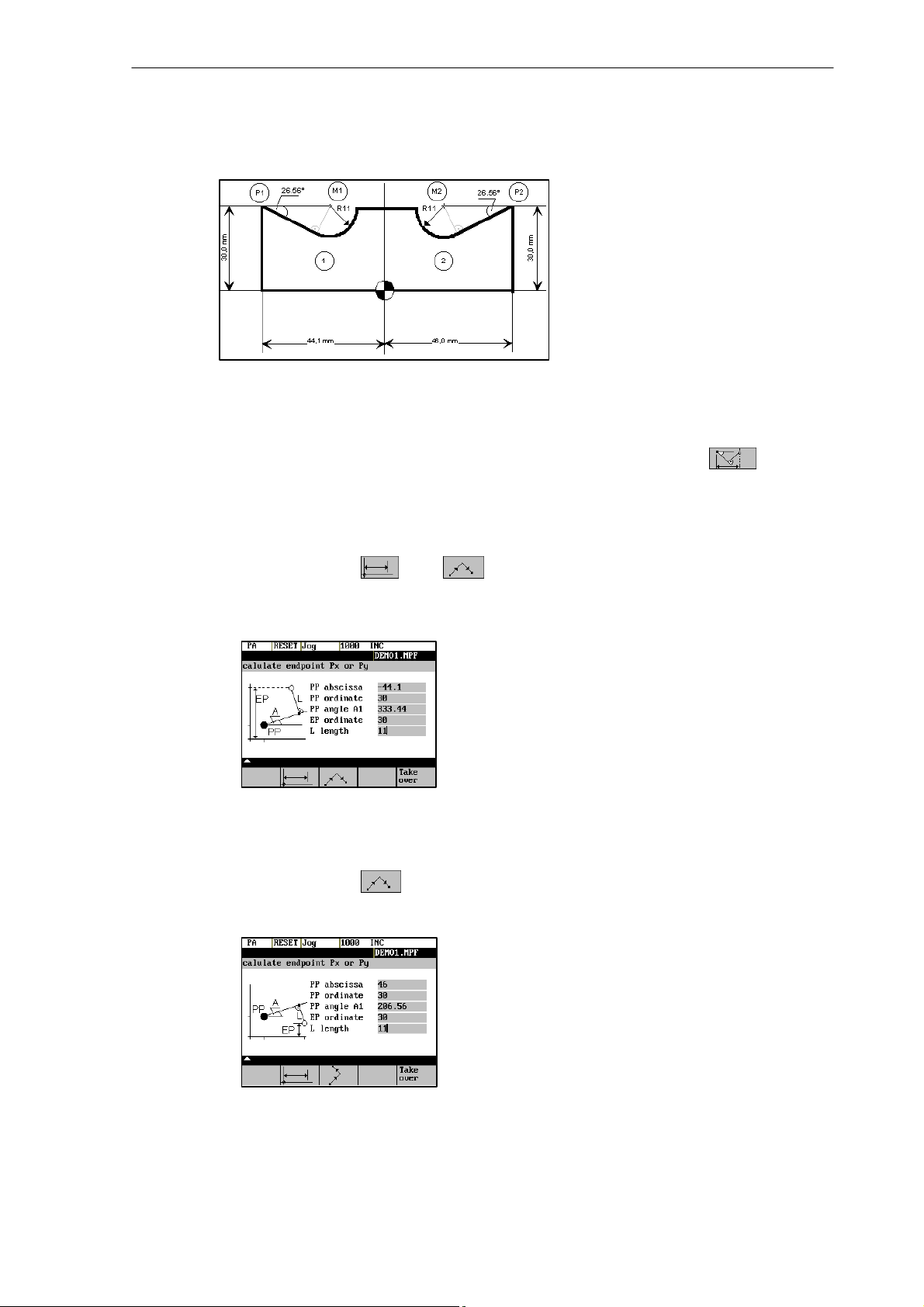
The drawing above must be added by the values of the of the circle center points to be able to
calculate the intersection points between the contour sections. Calculating the missing coordi-
nates of the center points is carried out with the pocket calculator function , since the
radius in the tangential transition stands vertical on the straight line.
Calculating M1 in section 1:
In this section, the radius stands on the straight line section in counter–clockwise direction.
Use the softkeys and to select the given constellation.
Enter the coordinates, the pole point P1, the rise angle of the straight line, the given ordinate value and the circle radius as the length.
Result: X = –19.449
Y = 30
Calculating M2 in section 2:
In this section, the radius stands on the straight line section rotated in clockwise direction.
Use the softkeys to select the given constellation.
Enter the parameters in the screen form.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
Result X = 21.399
Y = 30
1-21
Page 22
Introduction
1.5 Basic principles
1.5 Basic principles
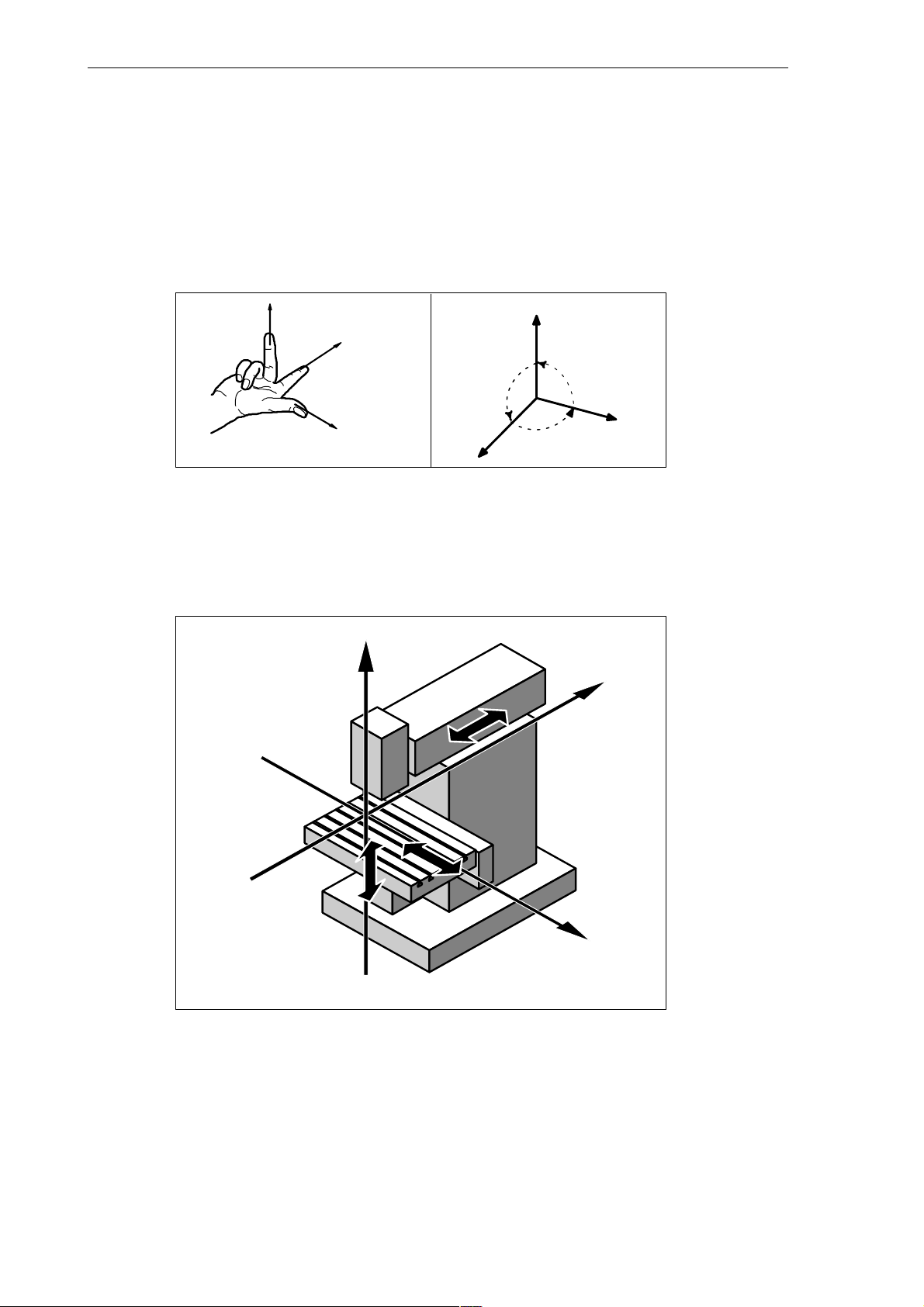
Coordinate sytems
Right–handed, rectangular coordinate systems are used for machine tools.
Such systems describe the movements on the machine as a relative motion between tool and
workpiece.
+Z
Fig. 1-8 Specification of mutual relationship between axis directions;
+X
+Y
+ Z
90°
90°
+Y
90°
+ X
Machine coordinate system (MCS)
The orientation of the coordinate system on the machine tool depends on the particular machine type. It can be turned to various positions.
+Z
+Y
+X
1-22
Fig. 1-9 Example of machine coordinates/axes
The origin of the coordinate system is the machine zero.
All axes are in zero position at this point. This point is merely a reference point determined by
the machine manufacturer. It need not to be approachable.
The traversing range of the machine axes can be negative.
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 23
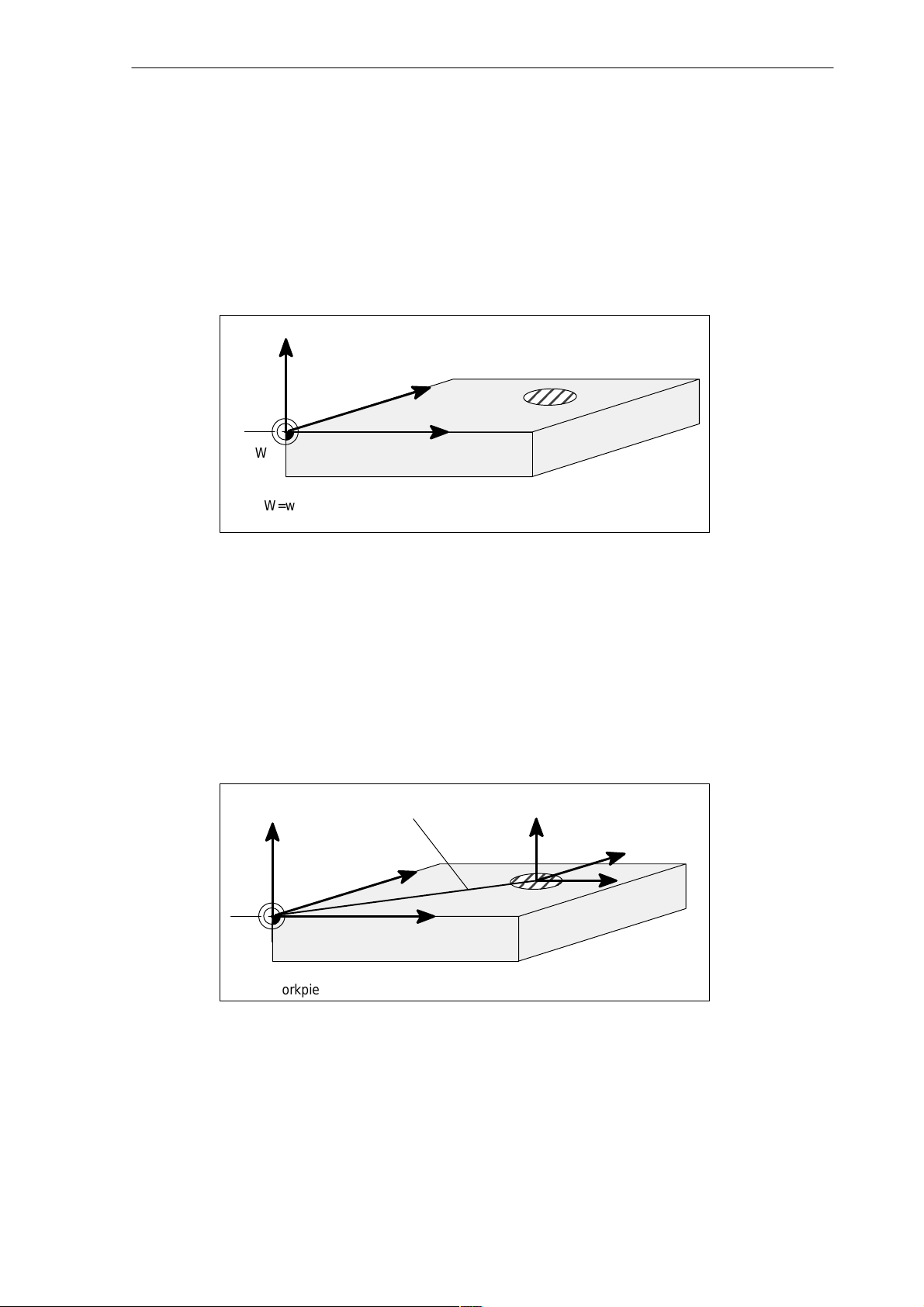
Workpiece coordinate system (WCS)
The workpiece coordinate system described above (see Fig. 1-8) is also used to describe the
geometry of a workpiece in the workpiece program.
The workpiece zero can be freely selected by the programmer. The programmer need not
know the real movement conditions on the machine, i.e. whether the workpiece or the tool
moves; this can be different in the individual axes.
The definition of the directions is based on the assumption that the workpiece does not move
and the tool moves.
Z
Y
Introduction
1.5 Basic principles
W
W=workpiece zero
Fig. 1-10 Workpiece coordinate system
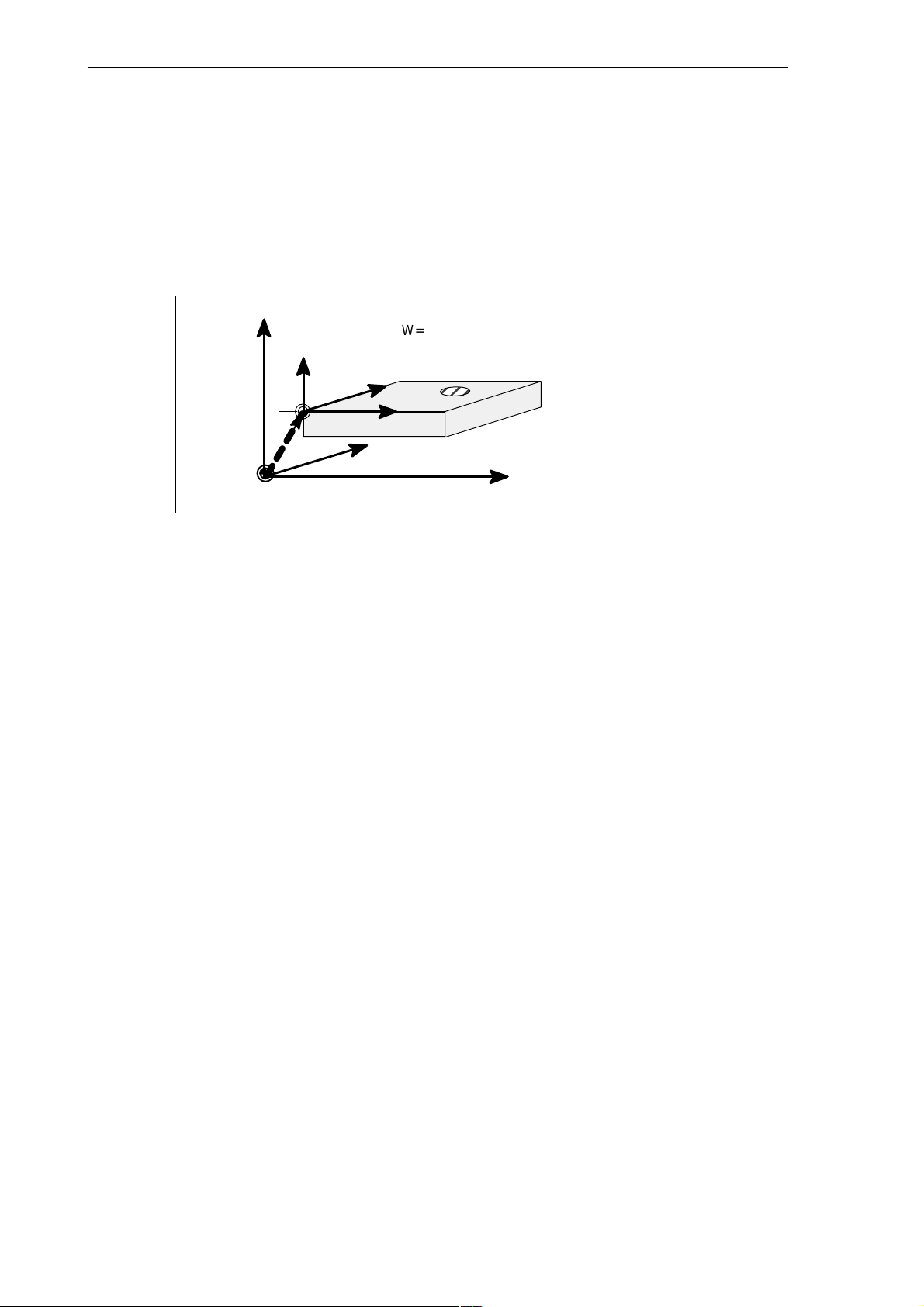
Current workpiece coordinate system
If the programmer feels that it is better to continue his geometrical descriptions from another
zero than the initially selected zero (workpiece zero), he can define a new zero using the programmable zero offset. Reference is always made to the original zero.
The use of the programmable zero offset provides a completely new current workpiece coordinate system. The current workpiece coordinate system can also be turned to the original
workpiece coordinate system (see Section “Programmable Zero Offset and Rotation”).
Programmable offset
Z
Y
X
G158
Z Current
Y
X
W
W=workpiece zero
Fig. 1-11 Coordinates on the workpiece, current workpiece coordinate sy-
stem
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
X
1-23
Page 24
Introduction
1.5 Basic principles
Workpiece clamping
To machine the workpiece, it is clamped on the machine. The workpiece must be aligned such
that the axes of the workpiece coordinate system run in parallel with the machine axes. Any
resultant offset of the machine zero is determined for each axis and entered into the intended
data areas for the settable zero offset. This offset is activated during the NC program execution by means, for example, of a programmable G54 (see Section ”Workpiece Clamping –
Settable Zero Offset ...”).
Z
Machine
Z
Workpiece
W=workpiece zero
M=machine zero
Y
W
z.B.
G54
M
Fig. 1-12 Workpiece on the machine
X
Y
Machine
X
Machine
1-24
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 25
Turning On and Reference Point Approach
Note
Before you switch on the SINUMERIK and the machines, you should also have read the machine documentation, since turning on and reference point approach are machine–dependent
functions.
Operating sequence
First switch on the power supply of the CNC and of the machine. After the control system has
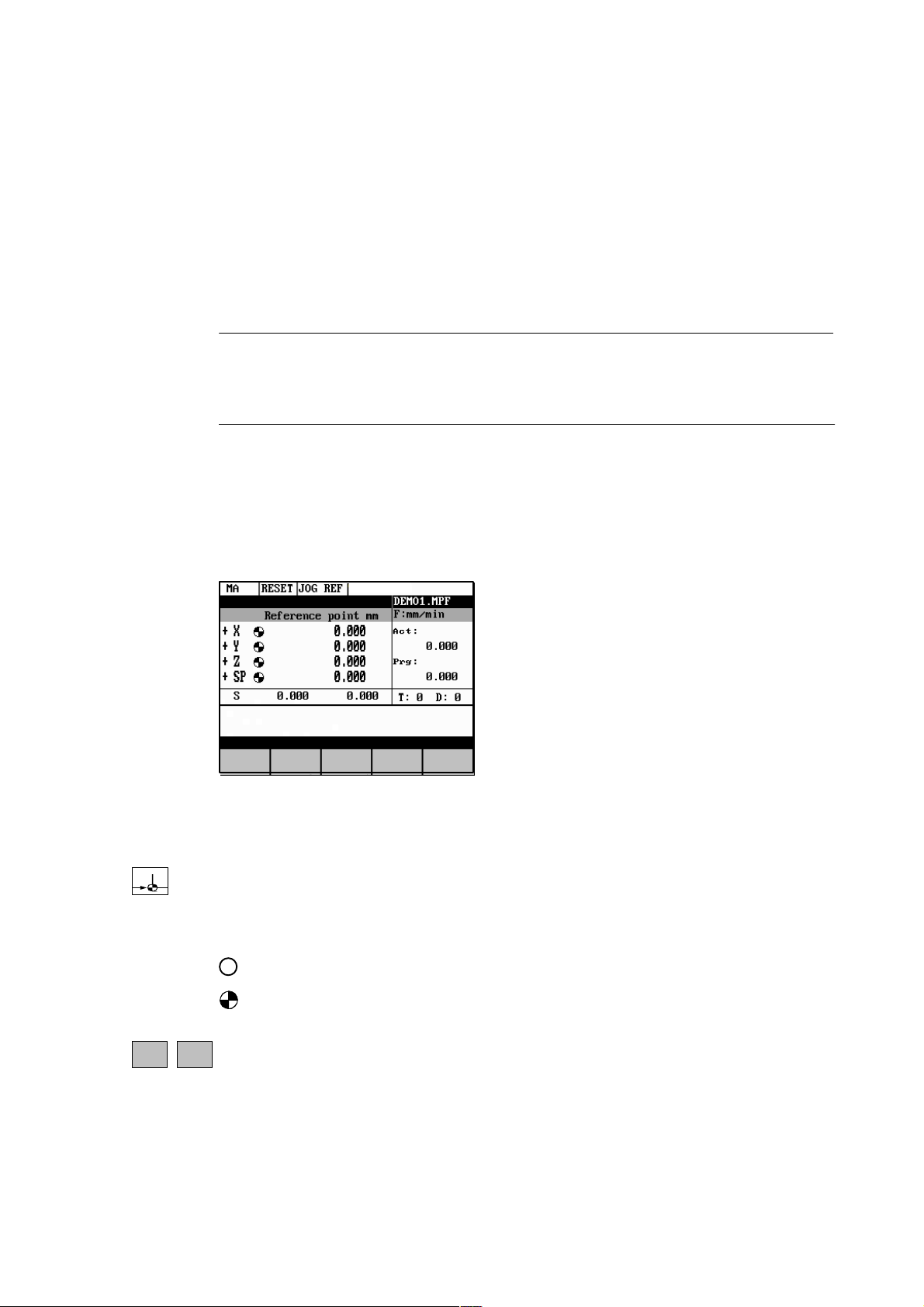
booted, you are in the “Machine” operating area, in the Jog operating mode.
The Reference point approach window is active.
2
+X
Fig. 2-1 Jog Ref basic screen
Reference–point approach can only be executed in the Jog mode.
Activate the “Approach reference point” function by selecting the Ref key on the machine control
panel.
In the “Reference point approach” window (Fig. 2-1), it is displayed whether or not the axes
have to be referenced.
Axis has to be referenced
Axis has reached the reference point
...
Press the direction keys.
-Z
The axis does not move if you select the wrong direction.
Approach the reference point in each axis successively.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
2-25
Page 26

Turning On and Reference Point Approach
You can quit the function by selecting another operating mode (MDA, Automatic or Jog).
2-26
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 27
Setup
Preliminary remarks
S Before you can use the CNC, set up the machine, tools, etc. on the CNC by:
S entering the tools and tool offsets
S entering/modifying the zero offset
S entering the setting data
3.1 Entering tools and tool offsets
Functionality
The tool offsets consist of several data that describe the geometry, wear and tool type.
Each tool has a defined number of parameters depending on the tool type.
Each tool is identified by its own tool number (T number).
3
See also Section 8.6 “Tool and Tool Offset“.
Operating sequences
Parameter
Tool
Corr.
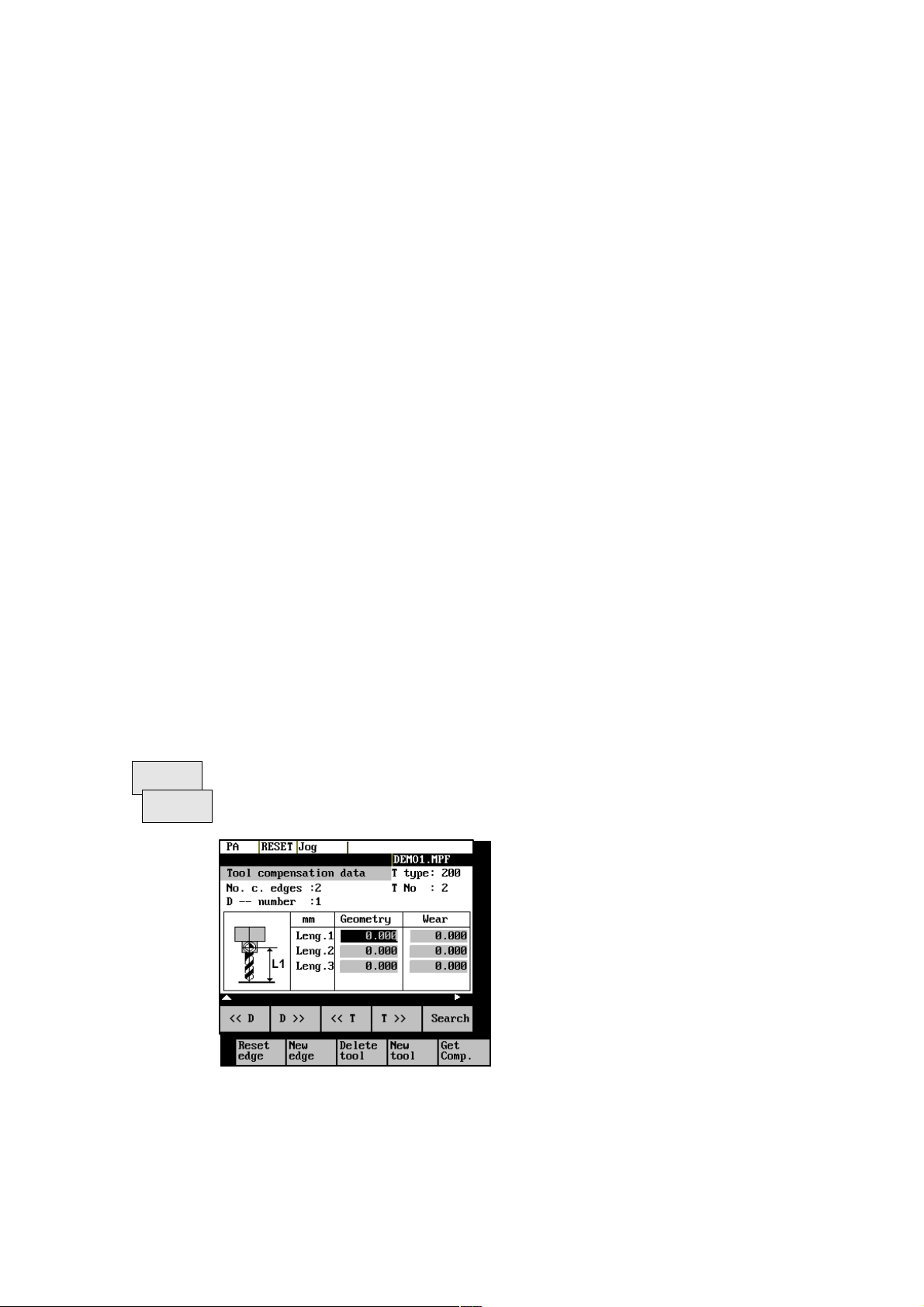
This function opens the Tool Compensation Data window, which contains the offset values of the
currently active tool. If you select another tool using the <<T or T>> softkeys, the setting remains
when you quit the window.
Fig. 3-1 Tool list
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
3-27
Page 28
Setup
3.2 Creating a new tool
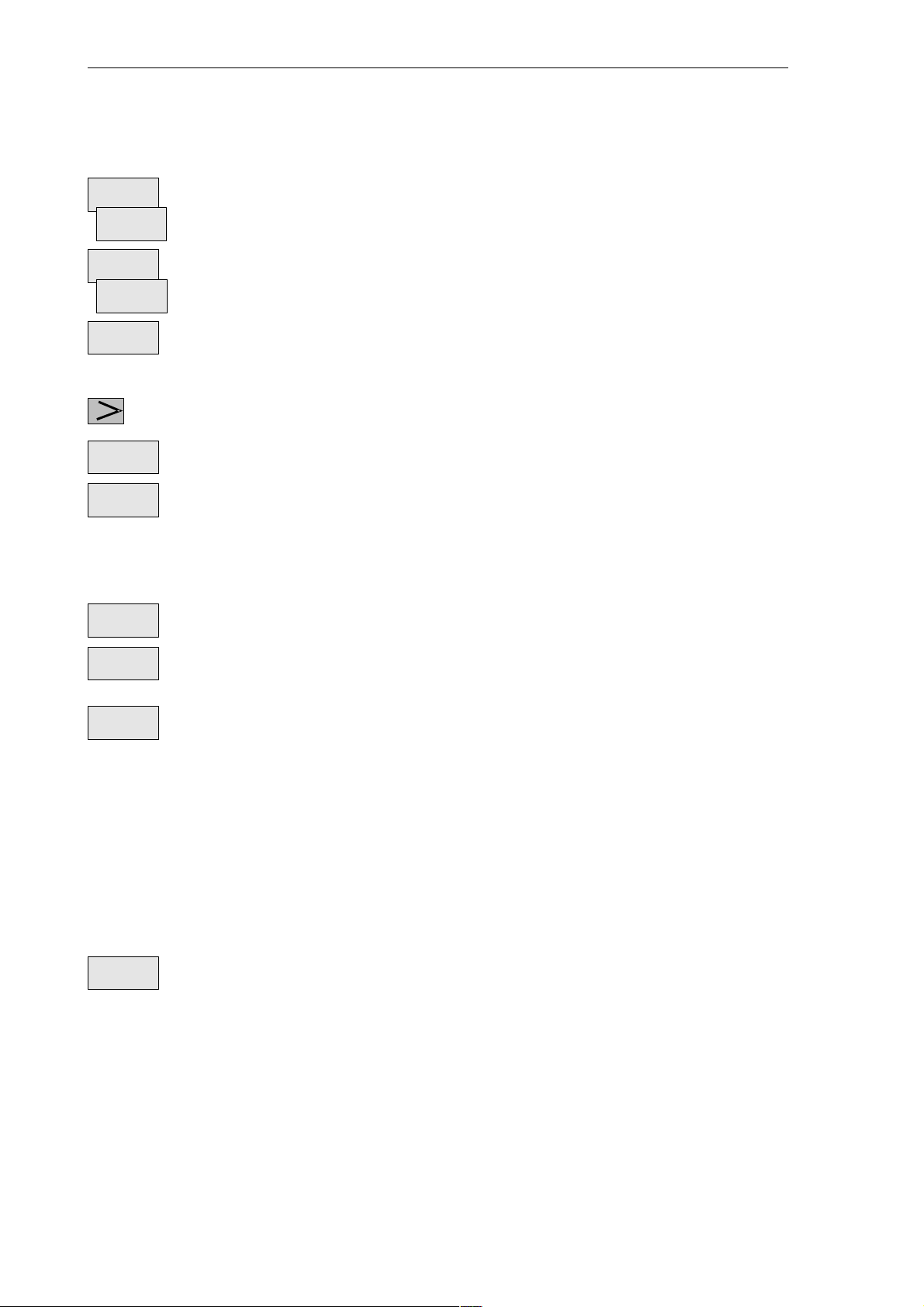
Softkeys
<< D
D >>
<< T
T >>
Search
Reset
edge
New
edge
Delete
tool
New
tool
Select next lower or next higher edge number.
Select next lower or next higher tool.
Pressing this softkey opens the dialog box and the overview of the tool numbers assigned. Enter the
tool number you search for in the input window and start search with OK. If the searched tool exists,
the search function opens the tool offset data box.
Press the ETC key to extend the softkey functions.
All edge compensation values are reset to zero.
Creates a new edge and loads it with the appropriate parameters.
The new edge is created for the currently displayed tool; it is automatically assigned the next
higher edge number (D1 - D9).
Max. 30 edges (in total) can be stored in the memory.
Deletes the tool compensation data of all edges of the selected tool.
Creates new tool compensation data for a new tool.
Note: Max. 20 tools can be created.
Get
Comp.
Determines the length compensation values.
3.2 Creating a new tool
Operating sequence
Press this softkey to create a new tool.
New
tool
Pressing this softkey opens the input window and an overview of the tool numbers assigned.
3-28
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 29
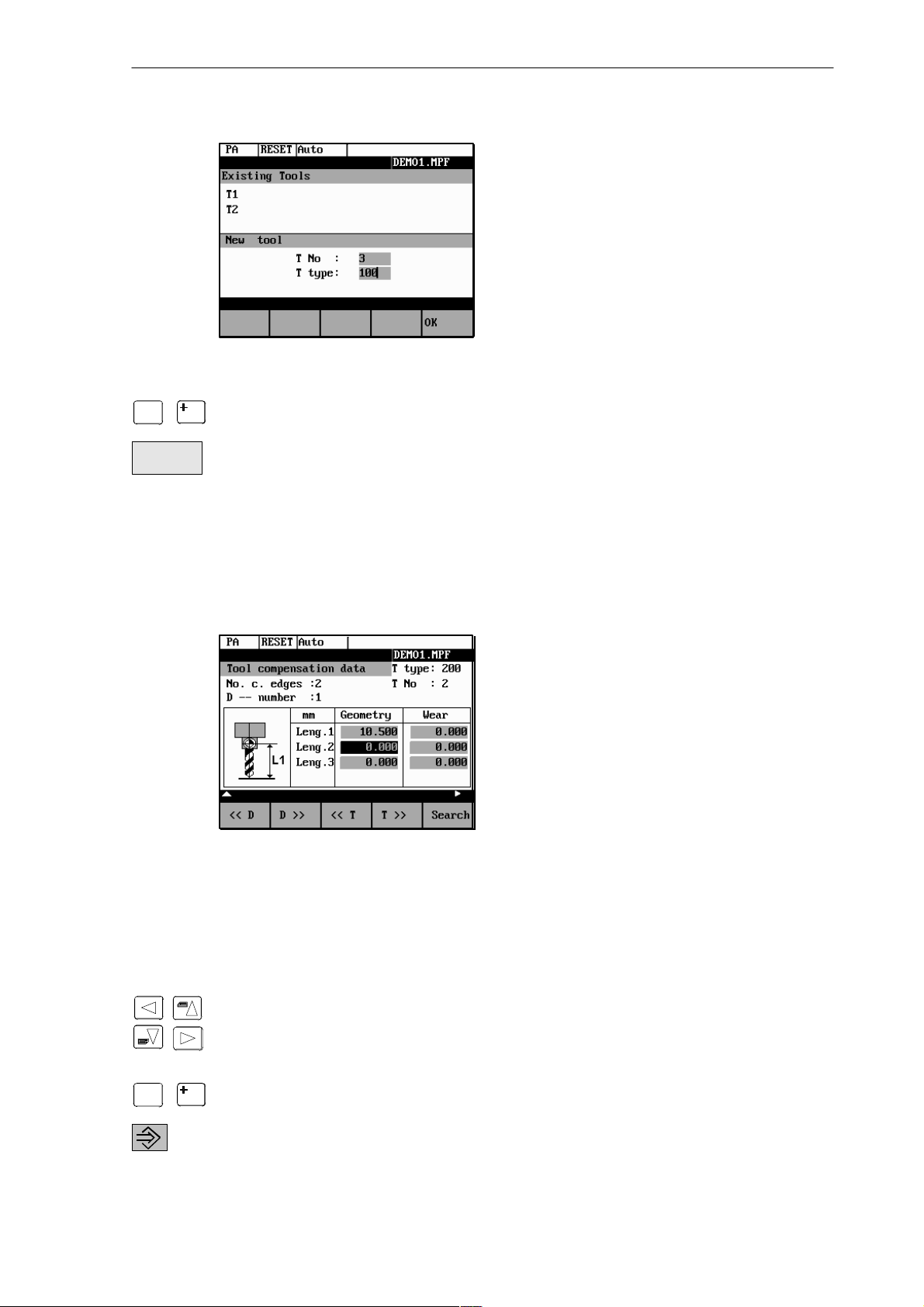
Fig. 3-2 New Tool window
Setup
3.3 Tool compensation data
$
0
. . .
Enter the new T number (in the range from 1 to 32000) and specify the tool type.
9
Press OK to confirm your entry; the Tool Compensation Data window is opened.
OK
3.3 Tool compensation data
The tool compensation data are divided into length and radius compensation data.
The list is structured according to the tool type.
Fig. 3-3 Tool compensation data
Operating sequence
Enter the offsets by
positioning the cursor on the input field to be modified,
$
0
. . .
entering value(s)
9
and confirming your entry by pressing Input or a cursor selection.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
3-29
Page 30
Setup
3.4 Determining the tool offsets
3.4 Determining the tool offsets
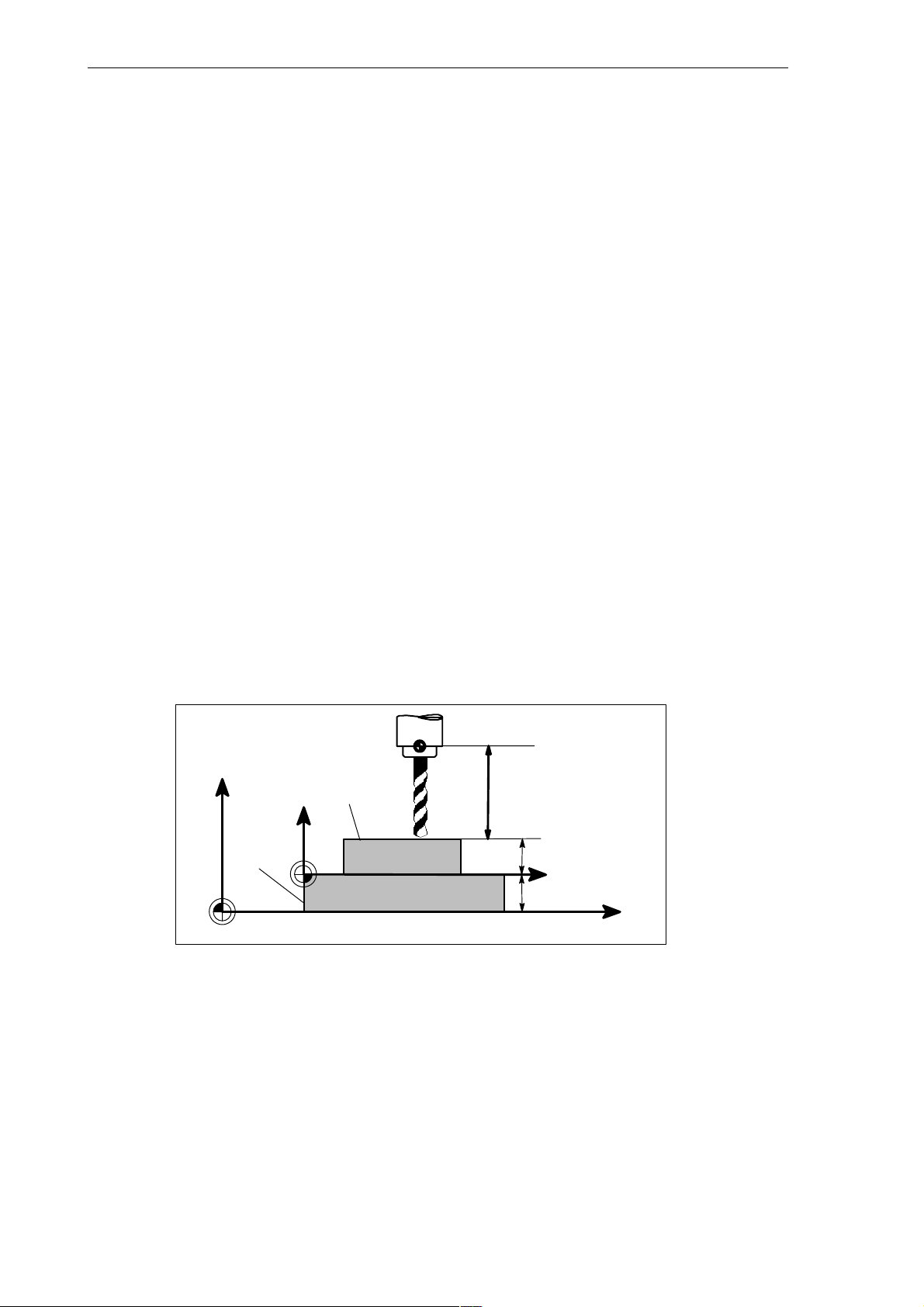
Functionality
This function can be used to determine the unknown geometry of a tool T.
Prerequisite
The appropriate tool has been changed. In JOG mode, approach a point on the machine, from
which you knw the machine coordinates, with the edge of the tool. This can be a workpiece
with a knwon position. The machine coordinate value can be split into two components: stored
zero offset and offset.
Procedure
Enter the offset value in the intended Offset field. Then select the required zero offset (e.g.
G54) or G500 if no zero offset is to be calculated. These entries must be made for each selected axis (see Fig. 3–5).
Please note the following: For milling tools, length 1 and the radius must be determined, and
for drilling tools only length 1.
Using the actual position of point F (machine coordinate), the offset entry and the selected
zero offset Gxx (position of the edge), the control system can calculate the assigned compensation value of length 1 or the tool radius.
Note: You can also use a zero offset already determined (e.g. G54 value) as the known machine coordinate. In this case, approach the workpiece zero with the edge of the tool. If the
edge stands directly at the workpiece zero, the offset value is zero.
F–tool carrier reference point
M–machine zero
W–workpiece zero
Z
Machine
Workpiece
M
Fig. 3-4 Determination of length compensation using the example of a drill: length 1/Z
axis
Interm. layer
W
F
Length 1=?
Actual position Z
Known machine
coordinate value Z
Offset
Gxx, z.B. G54
X
Machine
3-30
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 31

Operating sequence
Setup
3.4 Determining the tool offsets
Get
Comp.
Select the softkey Get Comp. The window Compensation values opens.
Fig. 3-5 Window Compensation values
S Enter offset if the tool edge cannot approach the zero point Gxx. If you work withut zero
offset, select G500 and and enter offset.
S When the softkey Calculate is pressed, the control system determines the searched geo-
metry length 1 or the radius depending on the preselected axis. This geometry is calculated on the basis of the approached actual position, the selected Gxx function and the entered offset value.
The determined compensation value is stored.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
3-31
Page 32

Setup
3.5 Entering/modifying zero offsets
3.5 Entering/modifying zero offsets
Functionality
The actual–value memory and thus also the actual–value display are referred to the machine
zero after the reference–point approach. The workpiece machining program, however, refers
to the workpiece zero.
This offset must be entered as the zero offset.
Operating sequenc
Parameter
Zero
offset
$
. . .
0
Use the Parameter and Zero Offset softkeys to select the zero offset.
An overview of settable zero offsets appears on the screen .
Fig. 3-6 Zero Offset window
Position the cursor bar on the input field to be altered,
enter value(s).
9
Softkeys
Deter–
mine
3-32
The next zero offset overview is displayed by Page down. G56 and G57 are now displayed.
Return to next–higher menu level, without saving the zero offset values.
Use this function to determine the zero offset with refer to the coordinate origin of the machine coordinate system. When you have selected the tool, which you want to use for measuring, you can set
the appropriate conditions in the Determine window.
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 33

Setup
3.5 Entering/modifying zero offsets
Fig. 3-7 Zero offset measuring using the Determine function
The toggle fields can be used to calculate the tool compensation values.
It is possible to specify an additional length in the Offset box, which must then be considered
in the calculation (for example, when using a spacer).
The current axis position, the active compensation value and the tool compensation data are
displayed.
Next
Uframe
Next
Axis
Calcu–
late
OK
Programmed
Sum
Move the tool to the selected zero and set all compensation values for the selected axis. The
Calculate softkey function will then caluclate the offset and enter the value in the respective
field. This process must be repeated for all axes.
Selects the next settable zero offset.
Selects the next axis.
The compensation values are caluclated with the Offset field and the current axis position (MCS).
The result will be assigned to the selected axis as an offset value.
Closes the window.
Opens a window with the programmed zero offset. The value shown in the window cannot be edited.
Displays the total of all active zero offsets. The values cannot be edited.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
3-33
Page 34

Setup
3.6 Determining the zero offset
3.6 Determining the zero offset
Prerequisite
You have selected the window with the corresponding zero offset (e.g. G54) and the axis for
which you want to determine the offset.
Approach
Fig. 3-8 Determining the zero offset for the Z axis
S A zero offset can only be determined with a known (entered geometry) and active tool. En-
ter the active tool in the dialog box. Press OK to take over the tool; the Determine window
is then opened.
S The selected axis appears in the Axis area.
The actual position of the tool support reference point (MCS) associated to the axis is displayed in the adjacent field.
S D number 1 is displayed for the tool edge.
If you have entered the valid offsets for the used tool under a D number other than D1,
enter that D number here.
S The stored tool type is displayed automatically.
S The effective length compensation value (geometry) is displayed.
S Select the sign (–, +) for calculating the length offset, or select “without”
taking the length offset into account.
A negative sign subtracts the length offset value from the actual position.
S If the tool can neither reach, nor “scrape” the desired position, an offset value can be ent-
ered in the Offset field.
3-34
S Approach the coordinates of the intended workpiece zero offset (if necessary with conside-
ration of the entered offset value) in JOG mode.
S The resulting zero offset is determined from the actual position and all active compensa-
tion values by means of the Calculate function.
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 35

Fig. 3-9 Select Tool screen form
Setup
3.6 Determining the zero offset
Next
UFrame
Calcu–
late
OK
Fig. 3-10 Determine Zero Offset form
Softkey can be used to select the zero offsets G54 to G57. The selected zero offset is displayed on
the selected softkey.
Pressing the Calculate softkey calculates the zero offset.
Press the OK softkey to quit the window.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
3-35
Page 36

Setup
3.7 Programming the setting data – “Parameters” operating area
3.7 Programming the setting data – “Parameters” operating area
Functionality
Use the setting data to define the settings for the operating states. These can also be modified
if necessary.
Operating sequence
Parameter
Sett.
data
$
0
. . .
Use the Parameter and Setting Data softkeys to select Setting Data.
The Setting Data softkey branches to another menu level in which various control options can
be set.
Fig. 3-11 Setting Data basic screen
Use the paging keys to position the cursor on the desired line within the display areas.
Enter the new value in the input fields.
9
Softkeys
Jog
data
3-36
Use Input or the cursor keys to confirm.
This function can be used to change the following settings:
Jog feed
Feed value in Jog mode
If the feed value is zero, the control system uses the value stored in the machine data.
Spindle
Spindle speed
Direction of rotation of the spindle
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 37

Setup
3.7 Programming the setting data – “Parameters” operating area
Spindle
data
Dry
feed
Start
angle
Minimum / Maximum
Limits for the spindle speed set in the Max. (G26)/Min. (G25) fields must be within the
limit values specified in the machine data.
Programmed (LIMS)
Programmable upper speed limitation (LIMS) at constant cutting speed (G96).
Dry–run feedrate for dry–run operation (DRY)
The feedrate you enter here is used in the program execution instead of the programmed feed
during the Automatic mode when the Dry–Run Feedrate is active (see Program Control, Fig.
5-3).
Start angle for thread cutting (SF)
A start angle representing the starting position for the spindle is displayed for thread cutting
operations. It is possible to cut a multiple thread by altering the angle and repeating the
thread cutting operation.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
3-37
Page 38

Setup
3.7 Programming the setting data – “Parameters” operating area
3.8 R parameters - “Parameters” operating area
Functionality
All R parameters (arithmetic parameters) that exist in the control system are displayed on the
R Parameters mainscreen as a list (see also Section 8.8 “Arithmetic Parameters /R Parameters/”).
These can be modified if necessary.
Fig. 3-12 R Parameters window
Operating sequence
Parameters
R Para–
meters
$
. . .
0
Use the Parameter and R Parameter softkeys
to position the cursor on the input field that you want to edit.
Enter value(s).
9
Press Input or use the cursor keys to confirm.
3-38
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 39

Manually Operated Mode
Preliminary remarks
The manually operated mode is possible in the Jog and MDA mode.
In the Jog mode, you can traverse the axes, and in the MDA mode, you can enter and ex-
ecute individual part program blocks.
4.1 Jog mode - ”Machine” operating area
Functionality
In the Jog mode, you can
S traverse the axes and
S set the traversing speed by means of the override switch, etc.
4
Operating sequence
Use the Jog key on the machine control panel to select the Jog mode.
+X
[ . ]
...
%
To traverse the axes, press the appropriate axis direction keys.
-Z
As long as the direction key is pressed and hold down, the axes traverse continuously at the
speed stored in the setting data. If this setting is zero, the value stored in the machine data is
used.
If necessary use the override switch to set the traversing speed.
If you press the Rapid Traverse Override key at the same time, the selected axis is traversed at
rapid traverse speed for as long as both keys are pressed down.
In the Incremental Feed operating mode, you can use the same operating sequence to traverse
the axis by settable increments. The set increment is displayed in the display area. Jog must be
pressed again to cancel.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
4-39
Page 40

Manually Operated Mode
4.1 Jog mode - ”Machine” operating area
The Jog basic screen displays position, feed and spindle values as well as the current tool.
Fig. 4-1 Jog basic screen
Parameters
Table 4-1 Description of parameters in the Jog basic screen
Softkeys
Parameter
MKS
Display of addresses of existing axes in machine coordinate system (MCS).
Explanation
X
Y
Z
+X
- Z
If you traverse an axis in the positive (+) or negative (-) direction, a plus or minus
sign appears in the respective field.
No axis is displayed, if the axis is in position.
Act.
The current position of the axes in the MCS or WCS is displayed in these fields.
mm
Repos
offset
If the axes are traversed in the Jog mode in the Program Interrupted condition, the
distance traversed by each axis in relation to the break point is displayed in this
column.
Spindle S
Display of actual value and setpoint of spindle speed
rpm
Feed F mm/
Display of path feed actual value and setpoint
min
Tool Display of currently active tool with the current cutting edge number
Hand–
wheel
Axis
feed
Interp./
feed
4-40
Call the Handwheel window.
Call the Axis Feed or Interp. Feed window.
Use this softkey to change between the Axis Feed window and the Interp. Feed window.
The softkey label changes to Interp. feed when the Axis/Feed window is opened.
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 41

Manually Operated Mode
4.1 Jog mode - ”Machine” operating area
Act. val.
WCS
Act.val.
MCS
The actual values are displayed as a function of the selected coordinate system. There are two
different coordinate systems, i.e. the machine coordinate system (MCS) and the workpiece coordinate system (WCS).
The softkey changes between MCS and WCS. When doing this, the softkey label changes as
follows:
S The values of the machine coordinate system are selected, the softkey label changes to
Act. val. WCS.
S When the workpiece coordinate system is selected, the label changes to Act. val. MCS.
Zoom
act.val.
Enlarged view of actual values
4.1.1 Assigning handwheels
An axis is assigned to the respective handwheel and becomes active as soon as you press
OK.
Operating sequence
In Jog mode, call the Handwheel window.
Handwheel
After the window has opened, all axis identifiers are displayed in the Axis column and also
appear in the softkey bar. Depending on the number of connected handwheels, it is possible
to change from handwheel 1 to handwheel 2 using the cursor.
Place the cursor on the line with the handwheel to which you wish to assign an axis. Then select the
softkey that contains the name of the axis.
The symbol appears in the window.
Fig. 4-2 Handwheel window
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
4-41
Page 42
Manually Operated Mode
4.1 Jog mode - ”Machine” operating area
WCS
MCS
OK
De–
select
The WCS/MCS softkey is used to select the axes from the machine or workpiece coordinate system
for assignment to the handwheel. The current setting is displayed in the handwheel window.
Use the OK softkey to take over the selected setting; the window is then closed.
Menu extension
The assignment you have made is reset for the selected handwheel.
4-42
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 43

Manually Operated Mode
4.2 MDA Mode (Manual Data Input) - “Machine” operating area
4.2 MDA Mode (Manual Data Input) - “Machine” operating area
Functionality
You can create and execute a part program block in the MDA mode.
Contours that require several blocks (e.g. roundings, chamfers) cannot be executed/program-
med.
Caution
!
Operating sequence
This mode is protected by the same safety interlocks as fully automatic mode.
Furthermore, the MDA mode is subject to the same prerequisites as the fully automatic mode.
Use the MDA key on the machine control panel to select the MDA mode.
Fig. 4-3 MDA basic screen
$
0
. . .
Enter a block using the control keyboard.
9
The entered block is executed by pressing NC START. The block cannot be executed while machi-
ning is taking place.
After processing, the contents of the input field remains stored so that the block can be traversed with new NC Start. The block is deleted by entering any new character.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
4-43
Page 44

Manually Operated Mode
4.2 MDA Mode (Manual Data Input) - “Machine” operating area
Parameters
Table 4-2 Description of the parameters in the MDA working window.
Softkeys
Zoom
block
Act.val.
WCS
Act.val.
MCS
Parameter
MCS
Display of existing axes in MCS or WCS
Explanation
X
Y
Z
If you traverse an axis in the positive (+) or negative (-) direction, a plus or minus
+X
- Z
sign appears in the respective field.
No sign is displayed if the axis is in position.
Act. value mmThe current position of the axes in the MCS or WCS is displayed in these fields.
Spindle S
Display of actual value and setpoint of spindle speed
rpm
Feed F Display of path feed actual value and setpoint in mm/min or mm/rev.
Tool Display of currently active tool with the current tool edge number (T..., D...).
Edit window In the Stop or Reset program state, an edit window is provided for input of the part
program block.
The window shows the currently edited block full length.
The actual values for the MDA mode are displayed as a function of the selected coordinate system.
There are two different coordinate systems, i.e. the machine coordinate system (MCS) and the
workpiece coordinate system (WCS).
Zoom
act.val.
Axis
feed
Interp.
feed
Zoom
G funct.
Zoom
M funct.
Enlarged view of the actual values
Menu extension
Display of Axis Feed or Interp. Feed window
This softkey can be used to change between the two windows. The softkey label changes to Interp.
Feed when the Axis Feed window is opened.
The G Function window contains all active G functions. Each G function is assigned to a group and
has a fixed position in the window.
More G functions can be displayed by pressing the PAGE UP or PAGE DOWN keys. You can exit
the window by pressing Recall.
Opens the M function window for displaying all active M functions of the block.
4-44
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 45

Automatic Mode
Functionality
In the Automatic mode, part programs can be executed fully automatically, i.e. this is the operating mode for standard processing of part programs.
Preconditions
The preconditions for executing part programs are:
S Reference point approached.
S You have already stored the required part program in the control system.
S You have checked or entered the necessary offset values, e.g. zero offsets or tool offsets.
S The required safety interlocks are activated.
Operating sequence
Use the Automatic key to select the Automatic mode.
5
The Automatic basic screen appears that displays the position, feed, spindle, and tool values,
as well as the current block.
Execu
t.
f. ext.
Fig. 5-1 Automatic basic screen
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
5-45
Page 46

Automatic Mode
Parameters
Table 5-1 Description of the parameters in the working window
Parameter
MCS
Display of existing axes in MCS or WCS.
Explanation
X
Y
Z
+ X
- Z
If you traverse an axis in the positive (+) or negative (-) direction, a plus or minus
sign appears in the respective field.
No sign is displayed if the axis is in position.
Act. val.mmThe current position of the axes in the MCS or WCS is displayed in these fields.
Distance
to go
Spindle S
The remaining distance to be traversed by these axes in the MCS or WCS is displayed in these fields.
Display of actual value and setpoint of spindle speed
rpm
Feed F
Display of path feed actual value and setpoint
mm/min or
mm/rev
Tool Display of currently active tool with the current cutting edge number (T..., D...).
Current
block
The block display contains the current block. The block is output in one line only
and truncated if necessary.
Softkeys
Progr.
control
Zoom
block
Search
Search
Interr.
point
Contin.
search
Start B
search
The window to select Program Control (e.g. skip block, program test) appears on the screen.
This window displays the previous, current and next block in full. In addition, the names of the current program or subroutine are displayed.
Use the Block Search function to jump to the desired point in the program.
The Search softkey provides the functions “Find line” and “Find text”.
The cursor is positioned to the main program block of the breakpoint (”interrupt point”). The search
target is automatically set in the subroutine levels.
Continue search
The Start B Search softkey starts the search process in which the same calculations are carried out
as in normal program mode, but without axis movements.
The block search can be canceled by NC Reset.
Act.val.
WCS
Act.val.
MCS
5-46
The values of the machine or workpiece coordinate system are selected. The softkey label changes
to Act. val. WCS or Act. val. MCS.
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 47

Automatic Mode
Zoom
act.val.
Axis
feed
Interp.
feed
Execut
f. ext.
Zoom
G Funkt.
Enlarged view of actual values
Menu extension
When pressing these softkeys, the Axis Feed or Interp. Feed window appears.
This softkey can be used to change between the windows. The softkey label changes to In-
terp. feed when the Axis Feed window is opened.
An external program is transferred to the control system via the V .24 interface and executed immediately by pressing NC Start.
Opens the G Function window to display all active G functions.
The G Function window contains all active G functions. Each G function is assigned to a
group and has a fixed position in the window. More G functions can be displayed by pressing
the PAGE UP or PAGE DOWN keys.
Zoom
M funct.
Fig. 5-2 Active G Functions window
Opens the M Function window to display all active M functions.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
5-47
Page 48

Automatic Mode
5.1 Selecting/starting a part program - “Machine” operating area
5.1 Selecting/starting a part program - “Machine” operating area
Functionality
The control system and the machine must be set up before the program is started. Please
note the safety instructions provided by the machine manufacturer.
Operating sequence
Use the Automatic key to select the Automatic mode.
Program
Programs
Select
Progr.
control
An overview of all programs stored in the control system is displayed.
Position the cursor bar on the desired program.
Use the Select softkey to select the desired program for processing.
If necessary now you can make settings for program control.
The following program control functions can be activated and deactivated:
5-48
Fig. 5-3 Program Control window
The part program is executed when NC START is pressed.
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 49

5.2 Block search - “Machine” operating area
5.2 Block search - “Machine” operating area
Operating sequence
Precondition: The desired program has already been selected (cf. Section 5.1), and the control system is in the reset state.
Automatic Mode
Search
Start B
search
Search result
The block search function can be used to advance the program up to the desired point in the part
program. The search target is set by positioning the cursor directly on the desired block in the part
program.
DEMO.MPF
Fig. 5-4 Search window
The funktion starts program advance and closes the Search window.
The desired block is displayed in the Current Block window.
5.3 Stopping/cancelling a part program - “Machine” operating area
Functionality
Part programs can be stopped and aborted.
Operating sequence
The execution of a part program can be interrupted by selecting NC STOP.
The interrupted program can be continued by NC START.
The current program can be aborted by pressing RESET.
When you press NC START again, the aborted program is restarted and executed from the begin-
ning.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
5-49
Page 50

Automatic Mode
5.4 Repositioning after interruption
5.4 Repositioning after interruption
Functionality
After a program interruption (NC STOP), you can move the tool away from the contour in the
manual mode (Jog). The control system stores the coordinates of the breakpoint (”interrupt
point”). The path differences traversed by the axes are displayed.
Operating sequence
Select the Automatic mode.
Search
Interr.
point
Start B
search
Open the Block Search window to load the breakpoint.
The breakpoint is loaded. The routine is adjusted to the start position of the interrupted block.
A block search to the breakpoint is started.
Continue execution of the program by NC START.
5-50
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 51

Automatic Mode
5.5 Program execution from external (V.24 interface)
5.5 Program execution from external (V.24 interface)
Functionality
An external program is transferred into the control system via the V.24 interface and executed
immediatelyby pressing NC Start.
While processing the contents of the buffer memory, the program is automatically reloaded.
For example, as an external device, a PC can be used, on which the PCIN tool for data transfer is installed.
Operating sequence
Prerequisite: The control system is reset.
The V.24 interface is parameterized correctly (see Chapter 7) and not occupied by any other
application (DataIn, DatatOut, STEP7).
Execute
f. ext.
Press this softkey .
Use PCIN on the external device (PC) to set the program for data output active.
The program is transferred to the buffer memory and automatically selected and displayed in
the program selection.
For the program execution, it is advantageous to wait until the buffer memory is filled.
The program execution starts with NC START. The program is reloaded continuously.
Either at the end of the program or when pressing RESET, the program is automatically remo-
ved from the control system.
Note
S As an alternative, External Program Execution can also be activated in the Services area.
S Any transfer errors are displayed in the Services area when you press the Error log softkey.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
5-51
Page 52

Automatic Mode
5.6 Teach In
5.6 Teach In
Functionality
Use the submode Teach In to accept the axis position values directly into a parts program
block to be generated or modified.
The axis positions are approached either in Automatic mode by traversing the JOG keys or by
using the handwheel. However, first press the appropriate softkey (see below) in the Programming operating area to enable the submode Teach In.
Operating sequence
Prerequisite:
– Teach–in option is set;
– The control system is either in the state Stop or Reset.
Programs
open
Edit
Teach In
on
A list of all programs existing in the control system is displayed.
Pressing Open calls the editor for the selected program and opens the editor window.
Menu extension
Select
Menu extension
Select
Softkeys
Technol.
Data
5-52
Fig. 5-5 Teach In basic screen
Use this softkey to generate a block with technological data.
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 53

Automatic Mode
5.6 Teach In
Use this screen form to enter
S feed value
S spindle speed and direction of rotation (CW; CCW; stop)
S tool and edge number
S machining level
S Feed mode (active; mm/min corresponds to G64; mm/rev. of spindle corresponds to G96)
S Positioning behavior (active; exact stop G60; continuous–path control mode G64)
Teach In
Records
Fig. 5-6 Input screen form for technological data
When you press OK, a block with the technological data entered is generated and inserted in
front of the block to which the cursor is positioned. Pressing RECALL cancels your entry and
lets you return to the Teach In basic screen.
Use this softkey to generate NC blocks using the traversing keys or the handwheel.
Simple NC blocks are generated by traversing with parallel axes using either the traversing
keys of the axes or the handwheel. It is also possible to correct the values of an existing
blocks.
Fig. 5-7 Teach In of NC blocks
Fast
Trav.
Linear
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
Use this softkey to generate a rapid traverse block (G0).
Use this softkey to generate a linear feed block (G1).
5-53
Page 54

Automatic Mode
5.6 Teach In
Circul.
Accept
Insert
Accept
Change
Finish
Record
Progr.
run
Teach In
Off
Use this softkey to generate a circular block (G5 with intermediate point and end point).
Use this softkey to generate a block with the values taught. The new block is inserted in front of the
block to which the cursor is positioned.
Values are corrected in the block (accepted from the screen form) to which the cursor is positioned.
Use RECALL to return to the Teach In basic screen. Any amendments you wish to make can
be later inserted manually.
Use this softkey to generate an M2 block to be inserted after the current block (cursor position)
Use this softkey to traverse the programmed block.
The machine screen set in Automatic mode appears again. Use NC Start to continue the selected but interrupted program from the block selected last (if the control system has not been
in Reset state). Teach In remains enabled. Block search with NCK is not possible.
Use this softkey to turn off the submode Teach In.
Note
After turning off Teach In, the interrupted program can no longer be edited.
Example
Teaching a G5 block
Fig. 5-8 Teach In of a circular block
S The program block with G5 is selected by the cursor .
S Press the softkey Circul.
The circle start point is the end point of the previous block.
S Approach to the intermediate point of the contour and press Accept Change.
S Approach to the end point of the contour and press Accept Change.
5-54
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 55

Part Programming
Functionality
This Section describes how to create a new part program.
The standard cycles can also be displayed provided you have the required access authoriza-
tion.
Operating sequence
You are in the main menu.
6
Programs
Softkeys
Cycles
The Programming main screen appears.
Fig. 6-1 Programming main screen
When the Program operating area is selected for the first time, the directory for part programs
and subroutines is automatically selected (see above).
The Standard Cycles directory is displayed by pressing the Cycles softkey.
This softkey is only displayed if the operator has the appropriate access authorization.
Select
Open
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
This function selects the program highlighted by the cursor for execution. The program is started on
next NC START.
Opens the files selected by the cursor for editing.
Menu extension
6-55
Page 56

Part Programming
New
Copy
Delete
Rename
Memory
Info
Use the New softkey to create a new program. A window appears in which you are prompted to
enter program name and type.
After you have confirmed your inputs by OK, the program editor is called, and you can enter
part program blocks. Select RECALL to cancel this function.
Use the Copy softkey to copy the selected program into another program.
The program highlighted by the cursor is deleted after the system has requested confirmation of the
delete operation.
Press OK to confirm the Delete request and RECALL to cancel it.
When you select the Rename softkey, a window appears in which you can rename the program that
you have already highlighted by the cursor.
After you have entered the new name, confirm your rename request by OK or cancel by RE-
CALL.
The Programs softkey can be used to change to the program directory.
When you press this softkey, the totally available NC memory (in kbytes) is displayed.
6-56
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 57

Part Programming
6.1 Entering a new program - “Program” operating area
6.1 Entering a new program - “Program” operating area
Functionality
This Section describes how to create a new file for a part program. A window appears in
which you are prompted to enter program name and type.
DEMO.MPF
Fig. 6-2 New Program input screenform
Operating sequence
Program
New
U
...
OK
You have selected the Program operating area. The Program Overview window showing the programs already stored in the CNC is displayed on the screen.
Press the New softkey. A dialog window appears in which you enter the new main program or subroutine program name. The extension .MPF for main programs is automatically entered. The extension .SPF for subroutines must be entered with the program name.
Enter the new name.
Complete your input by selecting the OK softkey. The new part program file is generated and is now
ready for editing.
The creation of the program can be interrupted by RECALL; the window is then closed.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
6-57
Page 58

Part Programming
6.2 Editing part programs - “Program” operating area
6.2 Editing part programs - “Program” operating area
Functionality
Part programs or sections of a part program can only be edited if not being executed.
All modifications to the part program are stored immediately.
Fig. 6-3 Editor window
Operating sequence
Programs
Open
You are in the main menu and have selected the Program operating area. The program overview
appears automatically.
Use the paging keys to select the program you wish to edit.
Pressing the Open softkey calls the editor for the selected program and pulss down the editor window.
The file can now be edited. All changes are stored immediately.
Select
Pressing the Select softkey selects the edited program for execution. This program is started with
next NC–Start.
Softkeys
User–assignable softkeys
You can assign predefined functions to the softkeys 1 – 4 (see Section 6.3.4 “User–Assignable Softkeys”).
Contour
6-58
The softkeys are assigned process–specific functions by the control manufacturer.
The contour functions are described in Section 6.3 ”Programming Support”.
Menu extension
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 59

Edit
Part Programming
6.2 Editing part programs - “Program” operating area
Mark
Delete
Copy
Past
Recomp.
cycles
This function selects a section of text up to the current cursor position.
This function deletes the selected text.
This function copies the selected text to the clipboard.
This function inserts a text from the clipboard at the current cursor poisition.
For re–compilation, the cursor must stand on the cycle call line of the program. The required parameters must be arranged directly in front of the cycle call and may not be separated by instruction or
comment lines. The function decodes the cycle name and prepares the screenform with the appropriate parameters. If there are any parameters outside the range of validity, the function automatically enters standard values. After the screenform has been quitted, the original parameter block is
replaced by the corrected one.
Note Only automatically generated blocks can be recompiled.
Note
To carry out these functions outside the Edit menu, it is also possible to use the key combinations <SHIFT> and
softkey 1 Mark
softkey 2 Delete block
softkey 3 Copy block
softkey 4 Insert block.
Assign
SK
Search
Text
Line no.
Contin.
Search
Menu extension
This function can be used to change the assignment of the softkey functions
1 – 4.
For more detail description refer to Section 6.3.4.
The softkeys Search and Contin. search can be used to search for a string chain in the program
file displayed on the screen.
Type the text you wish to find in the input line and start the Search operation by selecting the OK
softkey. If the character string you have specified cannot be found in the program file, an error message appears that must be acknowledged with OK. You can exit the dialog box without starting the
search by selecting RECALL.
Type the line number in the input line.
The search is started by pressing OK.
You can quit the dialog box without starting the search by selecting RECALL.
The functions searches through the file to find another character string that matches the target
string.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
6-59
Page 60

Part Programming
6.2 Editing part programs - “Program” operating area
Close
This function stores the changes in the file system and automatically closes the file.
Editing cyrillic letters
This function is only avaiable if the Russiona language option is selected.
Procedure
The control system offers a window for cyrillic letters to choose from. This is enabled/disabled
using the Toggle key.
Fig. 6-4
To select a character,
S use the letters X, Y or Z to choose the line
S and then enter the digit or the letter assigned to the corresponding column.
When you enter the digit, the character will be copied into the edited file.
6-60
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 61

6.3 Programming support
Functionality
The programming support facility contains various help levels simplifying the programming of
part programs without constraining your choice of inputs.
6.3.1 Vertical menu
Functionality
The vertical menu is displayed in the program editor .
The vertical menu allows you to quickly insert certain NC instructions into the part program.
Operating sequence
Part Programming
6.3 Programming support
You are in the program editor.
Press the VM key and select the desired instruction from the list.
Fig. 6-5 Vertical menu
Lines that end in “...” contain a collection of NC instructions. You can list these instructions by
pressing the Input key or entering the number of the line.
Fig. 6-6 Vertical menu
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
6-61
Page 62

Part Programming
6.3 Programming support
Use the paging keys to browse through the list.
Confirm your entry by pressing Input.
Alternatively, the number of the lines from 1 to 7 can be entered to select instructions and take
them over into the part program.
6.3.2 Cycles
Functionality
You can either specify your own machining cycles on assigning parameters or, alternatively,
use input forms in which you set all the necessary R parameters.
Operating sequences
LCYC 60
LCYC 61
OK
The screenforms are selected either with the available softkey functions or by means of the vertical
menu.
Fig. 6-7
The cycle support provides a screenform in which you can fill in all the necessary R parameters. A graphic and a context–sensitive help will assist you to fill in the form.
Select the OK softkey to transfer the generated cycle call to the part program.
6-62
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 63

6.3.3 Contour
Functionality
To create part programs quickly and reliably, the control system offers various contour screenforms. To use them, enter the appropriate parameters in the interactive screenforms.
The following contour elements and contour sections can be programmed using the contour
screenforms:
S Straight section with specification of end point or angle
S Circle sector with specification of center point / end point / radius
S Contour sector ’straight line – straight line’ with specification of angle and end point
S Contour section ’straight line – circle’ with tangential transition; calculated from angle, ra-
dius and end point
S Contour section ’straight line – circle’ with any transition; calculated from angle, radius and
end point
Part Programming
6.3 Programming support
S Contour section ’circle – straight line’ with tangential transition; calculated from angle, ra-
dius and end point
S Contour section ’circle – straight line’ with any transition; calculated from angle, radius and
end point
S Contour section ’circle – circle’ with tangential transition; calculated from angle, radius and
end point
S Contour section ’circle – circle’ with any transition; calculated from center point, radius and
end point
S Contour section ’circle – circle’ with any transition; calculated from center points and end
point
S Contour section ’circle – straight line’ with tangential transitions
S Contour section ’circle – circle – circle’ with tangential transitions
S Contour section ’straight line – circle – straight line’ with tangential transitions
Fig. 6-8
Softkeys
The sofkey functions branch into the contour elements.
Programming aid for programming straight line sections.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
6-63
Page 64

Part Programming
6.3 Programming support
Fig. 6-9
Enter the end point of the straight line.
G0/G1
G17/18/19
The block is traversed either at rapid traverse or with the programmed feedrate.
The end point can be entered either in the absolute dimension, as an incremental dimension
(referred to the starting point) or in polar coordinates. The current setting is displayed in the
interactive dialog screenform.
The end point can also be specified by a coordinate and the angle between the 1st axis and
the straight line.
If the end point is determined using polar coordinates, the length of the vector between pole
and end point is required, as well as the angle of the vector with reference to the pole. When
using the possibility, first a pole must be set.
Pressing this softkey selects the plane G17 (X–Y), G18 (Z–X) or G19 (Y–Z)
OK
6-64
Fig. 6-10
Type the values in the input fields and close the screenform with OK.
Pressing the OK softkey takes over the block into the part program and displays the Additional
Functions form in which you can extend the block by adding more instructions.
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 65

Additional functions
Fig. 6-11 Additional Functions screenform
Enter additional commands in the fields. The commands can be separated by means of
blanks, commas or semi–colons.
This screenform is available for all contour elements.
Part Programming
6.3 Programming support
OK
G2/G3
The OK softkey transfers the commands to the part program.
Select RECALL if you wish to exit the interactive form without saving the values.
The dialog screenform is used to create a circular block by means of the end and center point coordinates.
Fig. 6-12
This softkey changes the direction of rotation from G2 to G3. G3 appears on the display.
When you press the softkey again, you will return to G2.
G17/18/19
OK
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
Use this softkey to select the plane G17 (X–Y), G18 (Z–X) or G19 (Y–Z).
Pressing the OK softkey takes over the block into the part program and displays the Additional
Functions form in which you can extend the block by adding more instructions.
6-65
Page 66

Part Programming
6.3 Programming support
This function is intended to calculate the intersection point between two straight lines.
Specify the coordinates of the end point of the second straight line and the angles of the
straight line. For the coordinate value, the toggle key can be used to choose between absolute, incremental or polar coorinates.
If the starting point cannot be selected based on the previous blocks, the operator must set
the starting point.
Fig. 6-13 Calculating the intersection point between two straight lines
Table 6-1 Input in the interactive screenform
End point of straight
line 2
Angle of straight line 1 A1 The angle must be specified in the CCW direction in the range
Angle of straight line 2 A2 The angle must be specified in the CCW direction in the range
Feedrate F Feedrate
Plane X–Y, Z–X, Y–Z
This function is used to calculate the tangential transition between a straight line and a circle sector.
The straight line must be described by starting point and anle. The circle must be described by the
radius and by the end point.
E Specify the end point of the straight line depending on the selec-
ted plane (G17/18/19).
between 0 and 360 degrees.
between 0 and 360 degrees.
6-66
Fig. 6-14 Straight line – circle with tangential transition
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 67

Table 6-2 Input in the interactive screenform
Part Programming
6.3 Programming support
G2/G3
G17/18/19
POI
Circle end point
Straight line angle A The angle is specified in the CCW direction in the range between
Circle radius R Input field for the circle radius
Feed F Input field for the interpolation feed.
Circle center point M If there is no tangential transition between the straight line and the
This softkey is used to switch the direction of rotation from G2 to G3. G3 is displayed on the screen.
Pressing this softkey once more will switch the display back to G2.
E The end point of the circle must be specified depending on the
selected plane.
0 and 360 degrees.
circle, the circle center must be known. The circle center point is
specified depending on the calculation method (absolute or incremental dimension / polar coordinates) selected in the previous
block.
Both the center and the end points can be acquired either in the absolute dimensions, in the
incremental dimensions or as polar coordinates. The current setting is displayed in the interactive screenform.
Selection of the plane G17 (X–Y), G18 (Z–X) or G19 (Y–Z)
You can choose between tangential or any transition.
If the starting point cannot be determined from the previous blocks, the starting point must be
set by the operator.
The screenform will generate a straight line and a circle block from the entered data.
If there are several intersection points, the desired intersection point must be selected by the
operator in an interactive screenform.
This function is used to calculate the tangential transition between a circle sector and a straight line.
The circle sector must be described by the parameters starting point and radius, and the straight
line must be described by the parameters end point and angle.
Fig. 6-15 Tangential transition
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
6-67
Page 68

Part Programming
6.3 Programming support
Table 6-3 Input in the interactive screenform
G2/G3
G17/18/19
POI
Straight line end point
Center point M The center point of the circle must be entered either in absolute,
Circle radius R Input field for the circle radius
Angle of straight line 1 A The angle is specified in the CCW direction in the range between
Feedrate F Input field for the interpolation feedrate
This softkey is used to switch the direction of rotation from G2 to G3. G3 is displayed on the screen.
Pressing this softkey once more will switch back to G2; the display will change to G2.
The center point can be acquired either in absolute dimensions, incremental dimensions or polar
coordinates. The current setting is displayed in the interactive screenform.
Selection of the plane G17 (X–Y), G18 (Z–X) or G19 (Y–Z)
Use this softkey to choose between tangential or any transition.
E Enter the end point of the straight line depending on the selected
plane (G17/18/19).
incremental or polar coordinates.
0 and 360 degrees.
If the starting point cannot be generated from the previous blocks, the starting point must be
set by the operator.
The screenform will generate both a straight line and a circle block based on the entered data.
If there are several intersection points, the desired intersection point must be selected by the
operator from a dialog box.
This function is used to caluclate the tangential transition between two circle sectors. Circle sector 1
must be described by the parameters starting point and center point, and circle sector 2 must be
described by the parameters end point and radius.
To avoid an overdetermination, input fields not needed are hidden.
Fig. 6-16 Tangential transition
6-68
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 69

Table 6-4 Input in the interactive screenform
Part Programming
6.3 Programming support
G2/G3
G17/18/19
POI
End point of circle 2
E 1st and 2nd geomtery axes of the plane
Center point of circle 1 M1 1st and 2nd geometry axes of the plane
Radius of circle 1 R1 Input field for the circle radius
Center point of circle 2 M2 1st and 2nd geometry axes of the plane
Radius of circle 2 R2 Input field for the circle radius
Feedrate F Input field for the interpolation feedrate
This softkey is used to switch the direction of rotation from G2 to G3. G3 is displayed on the screen.
Pressing this softkey once more will switch back to G2; the display will change to G2.
The center point can be acquired either in absolute dimensions, incremental dimensions or polar
coordinates. The current setting is displayed in the interactive screenform.
Selection of the plane G17 (X–Y), G18 (Z–X) or G19 (Y–Z)
Use this softkey to choose between tangential or any transition.
If the starting point cannot be generated from the previous blocks, the starting point must be
set by the operator.
The screenform will generate two circle blocks based on the entered data.
Selecting the intersection point
POI 1
POI 2
If there are several intersection points, the desired intersection point must be selected by the
operator from a dialog box.
The contour is drawn using intersection point 1.
Fig. 6-17 selection of intersection point 1
The contour is drawn using intersection point 2.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
6-69
Page 70

Part Programming
6.3 Programming support
Fig. 6-18 Selection of intersection point 2
OK
Pressing this softkey will accept the intersection point of the displayed contour into the part program.
This function is used to insert a straight line tangentially between two circle sectors. The sectors are
determined by their center points and their radii. Depending on the selected direction of rotation,
different tangential intersection points result.
Use the screenform, which will appear, to enter the parameters center point and radius for
sector 1, as well as the parameters end point, center point and radius for sector 2. in addition,
the direction of rotation must be selected for the circles. The current setting is displayed in a
help screen.
The end and center points can be acquired either as absolute, incremental or polar coordinates.
The OK function will calculate three blocks from the given values and will insert them into the
part program.
6-70
Fig. 6-19 Screenform for calculating the contour section ’circle – straight line – circle’
Table 6-5 Input in the interactive screenform
End point E 1st and 2nd geometry axes of the plane
If no coordinates are entered, the function will provide the inter-
section point between the inserted circle sector and sector 2.
Center point of circle 1 M1 1st and 2nd geometry axes
Radius of circle 1 R1 Input field for radius 1
Center point of circle 2 M2 1st and 2nd geometry axes of the plane
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 71

Part Programming
6.3 Programming support
Table 6-5 Input in the interactive screenform, Fortsetzung
Radius of circle 2 R2 Input field for radius 2
Feedrate F Input field for the interpolation feedrate
If the starting point cannot be determined based on the previous blocks, the appropriate coordinates must be entered in the “Starting point” screenform.
The screenform will generate both a straight line and two circle blocks based on the entered
data.
G2/G3
G17/18/19
Example
Use this softkey to define the direction of rotation of the two circle sectors. You can choose between
Sector 1
G2 G3,
G3 G2,
G2 G2 and
G3 G3
The end point and the center points can be acquired either in absolute, incremental or polar coordinates. The current setting is displayed in the intractive screenform.
Selection of the plane G17 (X–Y), G18 (Z–X) or G19 (Y–Z)
Sector 2
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
6-71
Page 72

Part Programming
6.3 Programming support
Given: R1 18 mm
Starting point: The point X = 2 and Y = 30 mm is supposed as the starting point.
Fig. 6-20 Setting the starting point
After the starting point has been confirmed, the screenform can be used to calculate the
R2 15 mm
R3 15 mm
M1 X 20 Y 30
M2 X 50 Y 75
M3 X 75 Y 20
contour section – – .
Use softkey 1 to set the direction of rotation of the two circle sectors and to fil out the parame-
ter list.
The end point can be left open or the points X 50 Y 90 ( 75 + R 15) must be entered.
Fig. 6-21 Calling the screenform
6-72
Fig. 6-22 Result of step 1
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 73

Part Programming
6.3 Programming support
After you have filled out the screenform, press OK to quit the screenform. The intersection
points are caluclated and the two blocks are generated.
Since the end point has been left open, the intersection point between the straight line and
the circle sector is also the starting point for the subsequent contour definition.
Now, call the screenform for calculating the contour section – again.
Fig. 6-23 Calling the screenform
Fig. 6-24 Result of step 2
The end point of step 2 is the intersection point of the straight line with the circle sector
. Then, calculate the contour section starting point 2 – circle sector .
Fig. 6-25 Calling the screenform
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
6-73
Page 74

Part Programming
6.3 Programming support
Fig. 6-26 Result of step 3
Then, link the new end point with the starting point. To do so, use the function.
Fig. 6-27 Step 4
Fig. 6-28 Result of step 4
6-74
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 75

Part Programming
6.3 Programming support
This function is used to insert a circle sector tangentially between two adjacent circle sectors. The
circle sectors are described by their center points and their circle radii. The inserted sector is described by its radius.
Use the screenform to enter the parameters center point and radius for circle sector 1, and the
parameters end point, center point and radius for circle sector 2. in addition, the radius for the
inserted circle sector 3 must be entered and the direction of rotation be defined.
The end point and the center points can be acquired either as absolute, incremental or polar
coordinates.
The selected setting is displayed in a help screen.
The OK function will caluclate three blocks from the given values and will insert them into the
part program.
Fig. 6-29 Screenform for calculating the contour section ’circle – circle – circle
Table 6-6 Input in the dialog screenform
End point
Center point of circle 1 M1 1st and 2nd geometry axes of the plane
Radius of circle 1 R1 Input field for radius 1
Center point of circle 2 M2 1st and 2nd geometry axes of the plane
Radius of circle 2 R2 Input field for radius 2
Radius of circle 3 R3 Input field for radius 3
Feed F Input field for the interpolation feed
E 1st and 2nd geometry axes of the plane
If no coordinates are entered, the function
provides the intersection point between the
inserted circle sector and sector 2.
If the starting point cannot be deteremined from the previous blocks, the respective coordinates must be entered in the “Starting point” screenform.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
6-75
Page 76

Part Programming
6.3 Programming support
G2/G3
G17/18/19
Example
This softkey defines the direction of rotation of the three circles. It is possible to select between:
Sector 1
G2 G 3 G2,
G2 G2 G2,
G2 G2 G3,
G2 G3 G3,
G3 G2 G2,
G3 G3 G2,
G3 G2 G3,
G3 G3 G3
Selection of the plane G17 (X–Y), G18 (Z–X) or G19 (Y–Z)
Inserted Sector Sector 2
6-76
Fig. 6-30 Example
Given: R1 88 mm
R2 25 mm
R3 14 mm
M1 X 50 Y 0
M2 X 50 Y 50
The coordinates X 50, Y 75 (50 + R2) will be selected as the starting point.
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 77

Part Programming
6.3 Programming support
After you have confirmed the starting point, use the screenform to calculate the contour
section
(circle sector R2 – circle sector R1). The coordinates X50, Y 88 (R1) constitue the
end point for this contour section .
Fig. 6-31 Setting the starting point
Fig. 6-32 Calling the screenform ’circle – circle – circle’
Fig. 6-33 Result of step 1
In the second step, screenform is used to calculate the contour section (circle sector R1 – circle sector R2). For calculation, select direction of rotation G2 – G2 – G3. Since the
end point of step 1 is at the same time the starting point for step 2, no new starting point
needs to be set. For step 2, the coordinates X 50 Y 75 (50 + R2) constitute the end point. The
contour is thus closed.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
6-77
Page 78

Part Programming
6.3 Programming support
Fig. 6-34 Calling the screenform ’circle – circle – circle’
Fig. 6-35 Result of step 2
This function is used to insert a circle sector (with tangential transitions) between two straight lines.
The circle sector is described by the center point and the radius. The coordinates of the end point of
the second straight line and, optionally, angle A2. The first straight line is described by the starting
point and the angle A1.
If the starting point cannot be determined from the previous blocks, the starting point must be
set by the operator.
Fig. 6-36 Straight line – circle – ctraight line
6-78
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 79
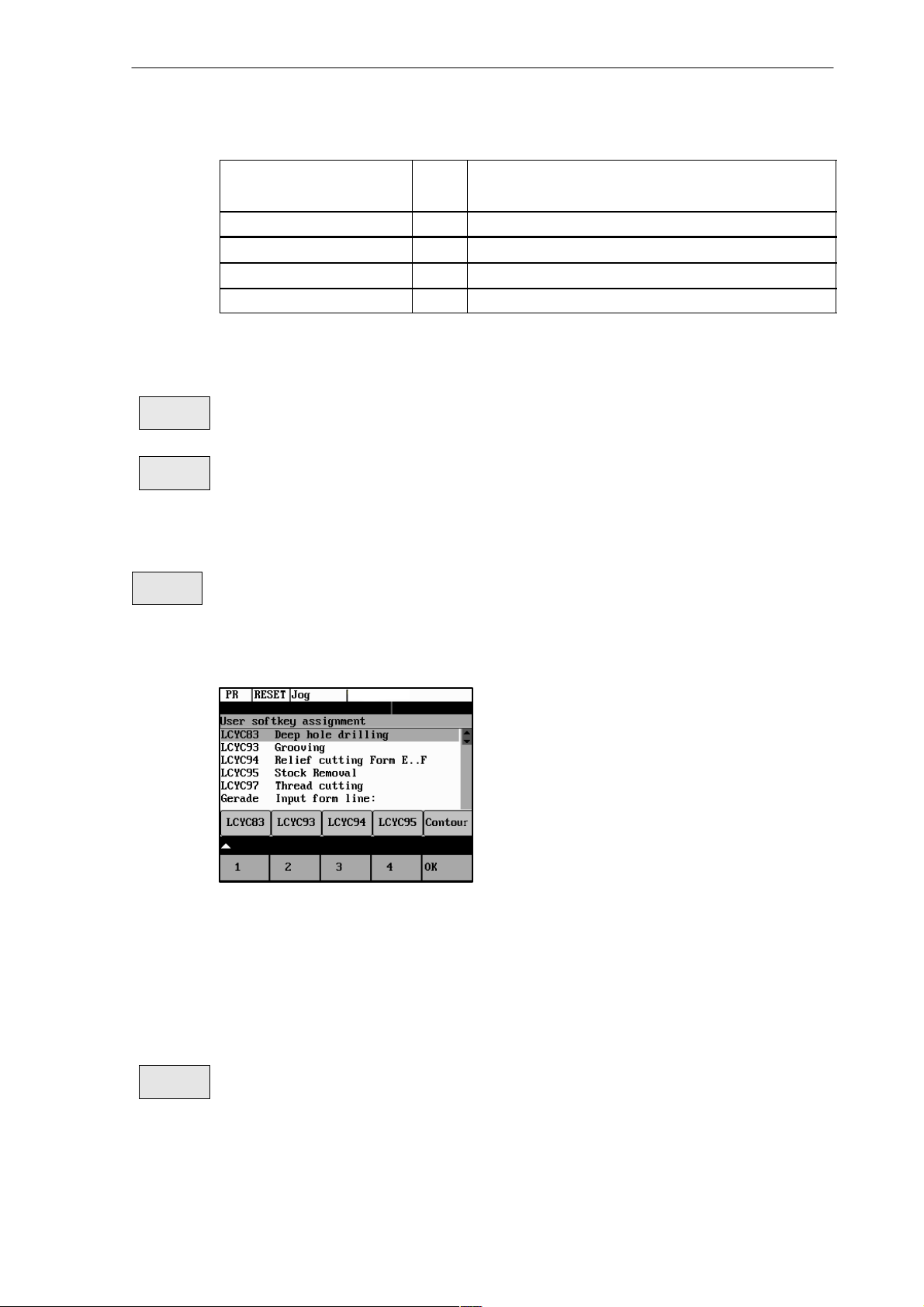
Table 6-7 Input in the interactive screenform
Part Programming
6.3 Programming support
End point of straight line 2
Circle center point M 1st and 2nd axes of the plane
Angle of straight line 1 A1 The angle must be specified in the CCW direction.
Angle of straight line 2 A2 The angle must be specified in the CCW direction.
Feedrate F Input field for the feedrate
E Enter the end point of the straight line.
End and center points can be specified either in absolute, incremental or polar coordinates.
The screenform will generate a circle and two straight line blocks from the entered data.
G2/G3
G17/18/19
Use this softkey to switch the direction of rotation from G2 to G3. G3 is displayed on the screen.
Pressing this softkey once more will switch back to G2; the display will change to G2.
Selection of the plane G17 (X–Y), G18 (Z–X) or G19 (Y–Z)
6.3.4 Free softkey assignment
Assign
SK
You can assign the softkeys various cycles or contours. To this aim, the softkeys 1 to 4 in the
softkey bar in the Program operating area are provided.
Once you have activated the Assign softkeys function, a list of all available cycles or contours appears on the screen.
Fig. 6-37
Position the cursor on the element you wish to assign.
Press the desired softkey from 1 to 4 to assign them the desired element. The assignment you
have made appears in the softkey bar under the selection list.
OK
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
Confirm the assignment you have made by selecting the OK softkey.
6-79
Page 80

Part Programming
6.3 Programming support
6-80
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 81

Services and Diagnosis
7.1 Data transfer via the V24 Interface
Functionality
You can use the V.24 (RS 232) interface of the CNC to output data (e.g. part programs) to an
external data storage medium or to read in them from there. The V.24 interface and the data
storage device must be matched to one another. The control system provides an interactive
screenform in which you can set the special data for your storage medium.
After you have selected the Services operating area, a list of all available part programs and
subroutines appears on the screen.
7
Fig. 7-1 Services main screen
File types
Provided the access authorization is set, files can be read in or read out via the V24 interface.
If the access authorization is set (cf. Technical Manual), the following data can be transmitted:
S Data
– Option data
– Machine data
– Setting data
– Tool offsets
– Zero offsets
– R parameters
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
7-81
Page 82

Services and Diagnosis
7.1 Data transfer via the V24 Interface
S Part programs
– Part programs
– Subroutines
S Start–up data
– NCK data
– PLC data
– Alarm texts
S Compensation data
– Leadscrew pitch/encoder errors
S Cycles
– Standard cycles
Operating sequence
Use the Service softkey to select the Services operating area.
Service
Softkeys
Data In
Start
DataOut
Start
RS232
setting
This key starts reading in data.
This key starts reading out data to the PG/PC or another device.
With the access authorization set, this function can be used to modify the interface parameters and
to save them.
Fig. 7-2 Interface settings
7-82
Position the cursor on the desired data.
Use the selection key to modify the settings in the left column. The special functions can be
activated and deactivated by the Select key.
Activating the transmission log
These softkeys are intended to adapt the V.24 interface to the transmission log. 2 logs are set
by default.
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 83

Services and Diagnosis
7.1 Data transfer via the V24 Interface
RS232
text
RS232
binary
Error
log
OK
Use this softkey to produce a log for the transfer of data, part programs and cycles.
Use this softkey to produce a log for the transfer of start–up data.
The baud rate can be adapted according to the receiver.
Press this softkey to save your settings.
Select RECALL to exit the window without saving your settings.
A log is output for the transferred data.
S For files to be output, it contains
- the file name and
- an error acknowledgement
S For imported files, it contains
- the file name and the path specification
- an error acknowledgement
Transmission messages:
OK Transmission completed successfully
ERR EOF End–of–file character received, but the archive file is not com-
plete.
Time Out Timeout monitoring is signaling an interruption in the transmis-
sion.
User Abort Transmission aborted by Stop softkey
Error Com Error at COM 1
NC / PLC Error NC error message
Error Data Data errors
1. Files read in with/without leader
or
2. Files transferred in tape format without file name
Error File Name The file name does not comply with NC name conventions.
no access right No access right for this function
Show
individual files.
Menu extension
Display of the data that are amongst the data types marked with “...”. Use this function to transfer
Execut
f. ext.
An external program is transferred to the control system via the V.24 interface and executed immediately by pressing NC Start (see Section 5.5).
Note
As an alternative, program execution from external can also be activated in the Automatic
area.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
7-83
Page 84

Services and Diagnosis
7.1 Data transfer via the V24 Interface
7.1.1 Interface parameters
Table 7-1 Interface parameters
Parameter
Device type S XON/XOFF
Description
One possible method of controlling the transmission operation is to use the
XON (DC1, DEVICE CONTROL 1) and XOFF (DEVICE CONTROL 2) control
characters. As soon as the buffer of the I/O device is full, it returns XOFF, and
as soon as it can receive data again, it sends XON.
S RTS/CTS
The RTS signal ( Request to Send) controls the send operation of the data
transmission device.
Aktive signal: Send data
Passive signal: Do not exit send mode until all transferred data have been
sent.
The CTS signal is the acknowledgment signal for RTS and indicates that the
data transmission device is ready to send.
XON This is the character that is used to start transmission. It is effective only for device
type XON/XOFF.
XOFF This is the character with which data transmission is stopped.
End of trans-
mission
Baud rate Interface speed settings
Data bits Number of data bits for asynchronous transmission.
Stop bits Number of stop bits for asynchronous transmission.
Parity Parity bits are used to detect errors. These are added to the coded character in
This is the character that signals end of transmission of a text file.
The special function “Stop with end of transmission” character may not be active if
binary data are to be transferred.
300 baud
600 baud
1200 baud
2400 baud
4800 baud
9600 baud
Input:
7 data bits
8 data bits (default)
Input:
1 stop bit (default)
2 stop bits
order to obtain either an even or odd number of positions set to “1” .
Input:
No parity (default)
Even parity
Odd parity
7-84
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 85

7.1.2 Special functions
Table 7-2 Special functions
Services and Diagnosis
7.1 Data transfer via the V24 Interface
Function
Start with XON Transmission starts if the transmitter
receives an XON character in the data
flow.
Overwrite with
confirmation
End of block
with CR LF
Stop at end of
transmission
Evaluate DSR
signal
Leader and
trailer
Tape format Import of part programs Import of archives in the
Timeout
monitoring
When a file is imported, a check is
made for an existing file of the same
name in the NC.
CR characters (hexadecimal 0D) are
inserted with tape format outputs.
The end–of–transmission character is
active.
Transmission is interrupted if the DSR
signal is missing.
Leader is skipped when data are received. A leader with 120 * 0 h is generated when data are output.
Transmission is interrupted after 5 seconds in case of transmission problems.
Active Inactive
Transmission starts independently of
any XON character.
The files are overwritten without confirmation request.
No additional characters are inserted.
The character is not evaluated.
DSR signal has no effect.
Leader and trailer are read in with
other data.
No leader is generated when data are
output.
SINUMERIK archive format
No abortion of transmission
7.1.3 Interface parameterization
Please find examples for setting the V24 interface below.
Start–up data
Settings for trtansferring archives with the start–up data
Fig. 7-3
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
7-85
Page 86

Services and Diagnosis
7.1 Data transfer via the V24 Interface
Punched–tape input / output
If a punched–tape reader/puncher is connected, check the “Leader/Trailer” box.
If the punched–tape reader is controlled via CTS, then check the “Stop at end of transmission”
box.
Device type: RTS/CTS
XON: 0
XOFF: 0
End of transm.: 0
Baud rate: 9600 baud
Data bits: 8
Stop bits: 2
Parity: No parity
Start with XON
Overwrite with confirmation
X Ends of block with CR LF
Stop at transmission end
X Evaluate DSR signal
Leader and trailer
X Tape format
X Timeout monitoring
Parameters for a serial printer
A printer with a serial interface is connected via an appropriate cable (cable check at CTS).
Device type: RTS/CTS
XON: 11(H)
XOFF: 13(H)
End of transm.: 1A(H)
Baud rate: 9600 baud
Data bits: 8
Stop bits: 1
Parity: No parity
Start with XON
Overwrite with confirmation
X End of block with CR LF
Stop at transmission end
X Evaluate DSR signal
X Leader and trailer
X Tape format
X Timeout monitoring
7-86
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 87

Services and Diagnosis
7.2 Diagnosis and start–up - ”Diagnostics” operating area
7.2 Diagnosis and start–up - ”Diagnostics” operating area
Functionality
In the “Diagnostics” operating area, you can call service and diagnostic functions, set start–up
switches, etc.
Operating sequence
Diagnostics
Selecting the Diagnostics softkey will open the Diagnostics main screen.
Fig. 7-4 Diagnostics main screen
Softkeys for diagnostic functions
Alarms
This window displays all pending alarms line by line, starting with the alarm with the highest priority.
Alarm number, cancel criterion and error text are displayed. The error text refers to the alarm
number on which the cursor is positioned.
Explanations with regard to the screenform above:
S Number
The “Number” item displays the alarm number. The alarms are displayed in chronological sequence.
S Cancel criterion
The symbol of the key required to reset the alarm is displayed for every alarm.
– Switch the device off and on again.
– Press the RESET key.
– Press the “Acknowledge alarm“ key.
– Alarm is reset by NC START.
S Text The alarm text is displayed.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
7-87
Page 88

Services and Diagnosis
7.2 Diagnosis and start–up - ”Diagnostics” operating area
Service
display
Service
axes
Servo
trace
The Service Axes window appears on the screen.
The window displays information about the axis drive.
Fig. 7-5 The “Service Axes” window
In addition, the Axis+ and Axis- softkeys are displayed. They can be used to call the values
for the next or previous axis.
To optimize the drives, an oscillograph function is provided for graphical representation of the velocity setpoint. The velocity setpoint corresponds to the +10V interface.
The start of recording can be linked with various criteria which permit recording in parallel to
internal conditions of the control system. The setting needed for this option must be carried
out in the “Select Signal” function.
The following functions can be used to analyze the result:
S Change scaling of abscissa and ordinate,
S Measure value by means of a horizontal or vertical marker,
S Measure the abscissa and ordinate values as a difference between two marker positions.
Fig. 7-6 The “Servo Trace” main screen
The heading of the diagram contains the current graduation of abscissa and ordinate, the current measured positions and the difference values of the markers.
The displayed diagram can be moved within the visible screen area by means of the cursor
keys.
7-88
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 89

Services and Diagnosis
7.2 Diagnosis and start–up - ”Diagnostics” operating area
Select
signal
Graduation
of abscissa
Initial values
Fig. 7-7 Meaning of the fields
Use this menu to select the axis to be measured, the measuring time, threshold value, pre–trigger/
post–trigger time and trigger conditions. The signal settings are fixed.
Current
marker
position
Graduation
of ordinate
Difference
display
of Markers
Fig. 7-8 Signal selection
S Selecting the axis: The axis is selected in the Axis toggle field.
S Signal type:
Velocity setpoint
Actual position value of measuring system 1
Following error
S Determining the measuring time: The measuring time is entered in ms directly in the
“Measuring Time” input field.
S Determining trigger time to or after
With input values < 0, recording starts by the set time prior to the trigger event, and with
values > 0 accordingly after the trigger event, whereby the following conditions must be
observed:
Trigger time + measuring time ≥ 0.
S Selecting the trigger condition: Position the cursor on the Trigger Condition field and
select the condition using the toggle key.
– No trigger, i.e. the measuring starts immediately after pressing the Start softkey.
– Negative edge
– Exact stop fine reached
– Exact stop coarse reached
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
7-89
Page 90

Services and Diagnosis
7.2 Diagnosis and start–up - ”Diagnostics” operating area
S Determining the trigger threshold: The threshold is entered directly in the Threshold
input field. It acts only for the trigger conditions “Positive edge“ and “Negative edge”.
Marker
Help
This function branches to another softkey level, in which the horizontal or vertical marker can be
switched on or off. The markers are displayed in the status bar.
The markers are moved in steps of one increment by means of the cursor keys. Larger step
widths can be set in the input fields. The value specifies the number of raster units per
<SHIFT> + cursor movement by which the marker is to be moved.
If a marker reaches the margin of the diagram, the next raster in horizontal or vertical direction
is automatically pulled down.
Fig. 7-9 Setting the markers
The markers can also be used to determine the differences in the horizontal or vertical direction. To this aim, position the marker on the start point and press either the Fix H – Mark. or
the Fix T– Mark. softkey. The difference between the start point and the current marker position is now displayed in the status bar. The softkey labeling changes to “Free H – Mark.” or
“Free T – Mark.”.
Pressing this functions calls explanations with regard to the displayed values on the screen.
Start
Stop
Zoom
Time +
Zoom
Time -
Zoom
V +
Zoom
V -
Auto.
scaling
Version
Type
Pressing the Start softkey starts recording. The softkey labeling changes to Stop. The note “Recording active” is displayed.
When the measuring time is elapsed, the softkey labeling changes to Start.
Pressing the Stop softkey aborts the current measuring. The softkey labeling changes to Start.
The scaling changes in the following steps:
1, 2, 5, 10, 20, 50, 100, 200, 500, 1,000 ms/div.
The horizontal scaling changes in the following steps:
0.01, 0.05, 0.1, 0.5, 1, 5, 10, 50, 100, 500, 1,000, 5,000 unit/ div
This function calculates the vertical scaling from the peak values.
This window contains the version numbers and the creation date of the individual CNC components.
displays the control type
7-90
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 91

Fig. 7-10 Control type
Softkeys for start–up functions
Note
See also Technical Manual
Services and Diagnosis
7.2 Diagnosis and start–up - ”Diagnostics” operating area
Start–up
Start–up
switch
!
NC
The start–up function branches to the following softkey functions:
Fig. 7-11
Start–up switch
You can assign the system power–up parameters various parameters.
Caution
Changes in the start–up branch have a considerable influence on the machine.
Selecting the power–up mode of the NC.
Fig. 7-12 NC start–up
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
7-91
Page 92

Services and Diagnosis
7.2 Diagnosis and start–up - ”Diagnostics” operating area
PLC
Fig. 7-13 PLC start–up
The PLC can be started in the following modes:
S Restart
S General reset
In addition, it is possible to link the selected mode with
OK
Edit
PLC txt
S subsequent simulation or
S subsequent debugging mode.
Use the OK key to start the NC start–up.
Return to the Start–up main screen without further action by RECALL.
This function can be used to insert or modify PLC alarm messages. Select the desired alarm number using the softkey function “Next Number”. The text currently valid is displayed in the window and
in the input line.
Fig. 7-14 Screenform for editing a PLC alarm text
Next
Number
Search
Number
7-92
Enter the new text in the input line. Complete your input by pressing INPUT.
For the notation of the texts refer to the Start–up Guide.
This function selects the next following text number for editing. When the last text number is reached, the process restarts with the first number.
This function selects the entered number for editing.
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 93

Services and Diagnosis
7.2 Diagnosis and start–up - ”Diagnostics” operating area
Save &
Exit
Recall
Pressing this function saves the modified texts. The editor is then quitted.
The editor is quitted without saving the changes.
Editing Chinese characters
This function is only available if a Chinese character set is loaded.
The editor shows a section of Chinese characters. Use the cursor to navigate in the list. If the
character you are looking for is not contained in the section, another section can be selected
using the letters A – Z. Pressing softkey 4 takes over the desired character to the input line. In
this mode, Latin letters cannot be entered.
Fig. 7-15 screenform for editing a PLC alarm text in Chinese
Next
Number
Search
Number
Change
Mode
Choose
Char
Save &
Exit
Recall
STEP 7
connect
The following softkey functions are realized:
This function selects the next following text number for editing. When the last text number is reached, the process restarts with the first number.
This function selects the entered number for editing.
This function toggles between the selection of the section and the input of Latin letters.
Pressing this softkey accepts the selected character into the input line.
Pressing this softkey saves the modified texts. The editor is then quitted.
The editor is quitted without saving the changes.
The S7–Conn menu can be used to link the PLC with the external programming package S7–200.
If the RS232 interface is already occupied by the data transfer, you can link the control system
with the programming package only when the transmission is completed.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
7-93
Page 94

Services and Diagnosis
7.2 Diagnosis and start–up - ”Diagnostics” operating area
When the link is activated, the RS232 interface is initialized. The following interface parameters are defined by the used program:
Device RTS – CTS
Baud rate 38400
Stop bits 1
Parity even
Data bits 8
Conn.
on
Conn.
off
PLC
status
Fig. 7-16 S7–200 connection
This function activates the connection between the PC and the control system. The softkey labeling
changes to Connection off (Conn. off).
The active or inactive condition, respectively, is maintained even if Power On is carried out
(except for booting with default data).
Press RECALL to quit the menu.
You can display information about the current states of PLC memory cells listed below; if desired
they can be altered.
It is possible to display 6 operands simultaneously.
Inputs I Input byte (IBx), input word (Iwx), input double word (IDx)
Outputs Q Output byte (Qbx), output word (Qwx), output double word (QDx)
Bit
memories
Timers T Timer (Tx)
Counters C Counter (Zx)
Data V Data byte (Vbx), data word (Vwx), data double word (VDx)
Format B
M Memory byte (Mx), memory word (Mw), memory double word (MDx)
Binary
H
Hexadecimal
D
Decimal
Binary representation cannot be used for double words. Counters and timers
are displayed in decimal format.
7-94
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 95

Services and Diagnosis
7.2 Diagnosis and start–up - ”Diagnostics” operating area
Fig. 7-17 PLC status display
There are further softkeys provided under this menu item.
S Edit
Cyclic updating of the values is interrupted. You can then edit the operand values.
S Cancel
Cyclic updating continues without the entered values being transferred to the PLC.
Set
password
S Accept
The entered values are transferred to the PLC; cyclic updating continues.
S Delete
All operands are deleted.
S Operand +
The address of the operand can be incremented in steps of 1.
S Operand -
The address of the operand can be decremented in steps of 1.
Set password
There are four different password levels implemented by the control system, thereby allowing
four different levels of access authorization:
S Siemens password
S System password
S Manufacturer password
S User password
You can edit the data depending on your level of access authorization (refer also to the Technical Manual)
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
7-95
Page 96

Services and Diagnosis
7.2 Diagnosis and start–up - ”Diagnostics” operating area
DEMO.MPF
Enter the password.
If you do not know the password, you will not be granted access.
The password is set when you press the OK softkey.
You can return to the Start–up main screen without saving your input by selecting RECALL.
Delete
password
Change
password
The access authorization is reset.
Change password
Fig. 7-18
Depending on the access authorization, various options for changing the password are provided in the softkey bar.
Use the softkeys to select the password level. Enter the new password and complete your
input with OK.
The system asks you to confirm the new password again.
Press OK to complete the password change.
You can return to the Start–up main screen without saving your input by RECALL.
Save
data
7-96
Save data
This function saves the contents of the volatile memory to a non–volatile memory area.
Prerequisite: No program is currently being run.
It is not allowed to perform any operating actions while saving data.
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 97

Softkeys for service functions
Services and Diagnosis
7.2 Diagnosis and start–up - ”Diagnostics” operating area
Machine
data
Machine data (see also Technical Manual)
Fig. 7-19
Changes to the machine data have a considerable influence on the machine. Incorrect parameter settings can result in irreparable damage to mechanical components.
Units userdef User–defined
m/s**2 Meters per second
U/s**3 Revolutions per second
s Second
Kgm**2 Moment of inertia
mH Inductivity
Nm Torque
us Microseconds
uA Microamperes
uVs Microvolt seconds
Effectiveness so Effective immediately
cf With confirmation
re Reset
po Power ON
General
MD
Axis
MD
General machine data
Open the General Machine Data window. Use the paging keys to page up and down.
Axis–specific machine data
Open the Axis–Specific Machine Data window. The softkey bar is extended by the Axis + and
Axis - softkeys.
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
7-97
Page 98

Services and Diagnosis
7.2 Diagnosis and start–up - ”Diagnostics” operating area
Fig. 7-20
The data of the axis are displayed.
Other
MD
Display
MD
Search
Continue
search
Axis +
Axis -
Other machine data
Open the Other Machine Data window. Use the paging keys to page up and down.
Display machine data
Open the Display Machine Data window. Use the paging keys to page up and down.
Search
Enter the number or name of the machine data you want to find and press
Input.
The cursor jumps to the target data.
Fig. 7-21
The search for the next number or name continues.
The Axis + and Axis - softkeys are used to switch over to the machine data area of the next or previous axis.
Active
MD
Active
MD
Display
bright.
Display
darker
Chang
e lang.
7-98
This softkey is used to activate the machine data marked with “cf” .
This softkey can be used to activate the machine data marked with “cf”.
Brightness
This softkey can be used to adjust the brightness of the screen.
The power–up setting can be input via a display machine data. The adjustment via these soft-
keys does not effect the setting in the display machine data.
Switching the language
Use the Change lang. softkey to switch between foreground and background languages.
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
Page 99

Programming
8.1 Fundamentals of NC programming
8.1.1 Program structure
Structure and contents
The NC program consists of a sequence of blocks (see Table 8-1).
Each block constitutes a machining step.
Instructions are written in a block in the form of words.
The last block in the sequence contains a special word for the end of program: M2.
Table 8-1 NC program structure
8
Block
Block N10 G0 X20 ... ; 1st block
Block N20 G2 Z37 ... ; 2nd block
Block N30 G91 ... ... ; ...
Block N40 ... ... ...
Block N50 M2 ; End of program
Program names
Every program has its own program name.
Note
When generating the program, its name can be freely chosen provided the following conditions are complied with:
S The first two characters must be letters;
S otherwise letters, digits or underscore may be used.
S Do not use more than 8 characters.
S Do not use separators (see Section “Character Set”)
Word Word Word ... ; Comment
Example: FRAME5231
SINUMERIK 802S/802C
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
8-99
Page 100

Programming
8.1 Fundamentals of NC programming
8.1.2 Word structure and address
Functionality/structure
The word is an element of a block and is mainly a control instruction.
The word (see Fig. 8-1) consists of
S an address character
The address character is generally a letter,
S and a numerical value.
The numerical value consists of a sequence of digits. A preceding sign or a decimal point
can be added to this sequence for certain addresses.
A positive sign (+) can be omitted.
Example:
Explanation:
Fig. 8-1 Word structure
Several address characters
A word may also contain several address letters. In such cases, however, an “=” sign must be
inserted to assign the numerical value to the address letters.
Example: CR=5.23
8.1.3 Block structure
Functionality
Word
Address Value
G1
Traverse
with linear
interpolation
Word
Address Value
X-20.1
Path or end
position for X
axis: –20.1 mm
Word
Address Value
F300
Feed:
300 mm/min
8-100
A block should contain all data required to execute a machining step.
6FC5 598–3AA10–0BP2 (01.02) (OP–M)
SINUMERIK 802S/802C
 Loading...
Loading...