

fanuc 150i MB Operator Manual
GE Fanuc Automation
Computer Numerical Control Products
Series 15i-MB
Series 150i-MB
Operator’s Manual (Programming)
GFZ-63784EN/01 February 2002
Warnings, Cautions, and Notes
as Used in this Publication
Warning notices are used in this publication to emphasize that hazardous voltages, currents,
temperatures, or other conditions that could cause personal injury exist in this equipment or
may be associated with its use.
In situations where inattention could cause either personal injury or damage to equipment, a
Warning notice is used.
Caution notices are used where equipment might be damaged if care is not taken.
GFL-001
Warning
Caution
Note
Notes merely call attention to information that is especially significant to understanding and
operating the equipment.
This document is based on information available at the time of its publication. While efforts
have been made to be accurate, the information contained herein does not purport to cover all
details or variations in hardware or software, nor to provide for every possible contingency in
connection with installation, operation, or maintenance. Features may be described herein
which are not present in all hardware and software systems. GE Fanuc Automation assumes
no obligation of notice to holders of this document with respect to changes subsequently made.
GE Fanuc Automation makes no representation or warranty, expressed, implied, or statutory
with respect to, and assumes no responsibility for the accuracy, completeness, sufficiency, or
usefulness of the information contained herein. No warranties of merchantability or fitness for
purpose shall apply.
©Copyright 2002 GE Fanuc Automation North America, Inc.
All Rights Reserved.
B-63784EN/01 SAFETY PRECAUTIONS
SAFETY PRECAUTIONS
This section describes the safety precautions related to the use of CNC units.
It is essential that these precautions be observed by users to ensure the safe operation of machines
equipped with a CNC unit (all descriptions in this section assume this configuration). Note that some
precautions are related only to specific functions, and thus may not be applicable to certain CNC units.
Users must also observe the safety precautions related to the machine, as described in the relevant
manual supplied by the machine tool builder. Before attempting to operate the machine or create a
program to control the operation of the machine, the operator must become fully familiar with the
contents of this manual and relevant manual supplied by the machine tool builder.
CONTENTS
CONTENTS
CONTENTSCONTENTS
1. DEFINITION OF WARNING, CAUTION, AND NOTE.........................s-2
2. GENERAL WARNINGS AND CAUTIONS .............................................s-3
3. WARNINGS AND CAUTIONS RELATED TO PROGRAMMING ........s-5
4. WARNINGS AND CAUTIONS RELATED TO HANDLING .................s-8
5. WARNINGS RELATED TO DAILY MAINTENANCE...........................s-11
s-1

SAFETY PRECAUTIONS B-63784EN/01
DEFINITION OF WARNING, CAUTION, AND NOTE
This manual includes safety precautions for protecting the user and preventing damage to the machine.
Precautions are classified into Warning and Caution according to their bearing on safety. Also,
supplementary information is described as a Note. Read the Warning, Caution, and Note thoroughly
before attempting to use the machine
WARNING
Applied when there is a danger of the user being injured or when there is a damage of both the user
being injured and the equipment being damaged if the approved procedure is not observed.
CAUTION
Applied when there is a danger of the equipment being damaged, if the approved
procedure is not observed.
NOTE
The Note is used to indicate supplementary information other than Warning and
Caution.
- Read this manual carefully, and store it in a safe place.
s-2
B-63784EN/01 SAFETY PRECAUTIONS
GENERAL WARNINGS AND CAUTIONS
WARNING
1. Never attempt to machine a workpiece without first checking the operation of the machine. Before
starting a production run, ensure that the machine is operating correctly by performing a trial run
using, for example, the single block, feedrate override, or machine lock function or by operating the
machine with neither a tool nor workpiece mounted. Failure to confirm the correct operation of the
machine may result in the machine behaving unexpectedly, possibly causing damage to the
workpiece and/or machine itself, or injury to the user.
2. Before operating the machine, thoroughly check the entered data.
Operating the machine with incorrectly specified data may result in the machine behaving
unexpectedly, possibly causing damage to the workpiece and/or machine itself, or injury to the user.
3. Ensure that the specified feedrate is appropriate for the intended operation. Generally, for each
machine, there is a maximum allowable feedrate.
The appropriate feedrate varies with the intended operation. Refer to the manual provided with the
machine to determine the maximum allowable feedrate.
If a machine is run at other than the correct speed, it may behave unexpectedly, possibly causing
damage to the workpiece and/or machine itself, or injury to the user.
4. When using a tool compensation function, thoroughly check the direction and amount of
compensation.
Operating the machine with incorrectly specified data may result in the machine behaving
unexpectedly, possibly causing damage to the workpiece and/or machine itself, or injury to the user.
5. The parameters for the CNC and PMC are factory-set. Usually, there is not need to change them.
When, however, there is not alternative other than to change a parameter, ensure that you fully
understand the function of the parameter before making any change.
Failure to set a parameter correctly may result in the machine behaving unexpectedly, possibly
causing damage to the workpiece and/or machine itself, or injury to the user.
6. Immediately after switching on the power, do not touch any of the keys on the MDI panel until the
position display or alarm screen appears on the CNC unit.
Some of the keys on the MDI panel are dedicated to maintenance or other special operations.
Pressing any of these keys may place the CNC unit in other than its normal state. Starting the
machine in this state may cause it to behave unexpectedly.
7. The operator's manual and programming manual supplied with a CNC unit provide an overall
description of the machine's functions, including any optional functions. Note that the optional
functions will vary from one machine model to another. Therefore, some functions described in the
manuals may not actually be available for a particular model. Check the specification of the
machine if in doubt.
s-3
SAFETY PRECAUTIONS B-63784EN/01
WARNING
8. Some functions may have been implemented at the request of the machine-tool builder. When using
such functions, refer to the manual supplied by the machine-tool builder for details of their use and
any related cautions.
NOTE
Programs, parameters, and macro variables are stored in nonvolatile memory in the CNC unit. Usually,
they are retained even if the power is turned off.
Such data may be deleted inadvertently, however, or it may prove necessary to delete all data from
nonvolatile memory as part of error recovery.
To guard against the occurrence of the above, and assure quick restoration of deleted data, backup all
vital data, and keep the backup copy in a safe place.
s-4
B-63784EN/01 SAFETY PRECAUTIONS
WARNINGS AND CAUTIONS RELATED TO PROGRAMMING
This section covers the major safety precautions related to programming. Before attempting to perform
programming, read the supplied operator's manual and programming manual carefully such that you are
fully familiar with their contents.
WARNING
1.Coordinate system setting
If a coordinate system is established incorrectly, the machine may behave unexpectedly as a result of the
program issuing an otherwise valid move command.
Such an unexpected operation may damage the tool, the machine itself, the workpiece, or cause injury to
the user.
2.Positioning by nonlinear interpolation
When performing positioning by nonlinear interpolation (positioning by nonlinear movement between
the start and end points), the tool path must be carefully confirmed before performing programming.
Positioning involves rapid traverse. If the tool collides with the workpiece, it may damage the tool, the
machine itself, the workpiece, or cause injury to the user.
3.Function involving a rotation axis
When programming polar coordinate interpolation or normal-direction (perpendicular) control, pay
careful attention to the speed of the rotation axis. Incorrect programming may result in the rotation axis
speed becoming excessively high, such that centrifugal force causes the chuck to lose its grip on the
workpiece if the latter is not mounted securely.
Such mishap is likely to damage the tool, the machine itself, the workpiece, or cause injury to the user.
4.Inch/metric conversion
Switching between inch and metric inputs does not convert the measurement units of data such as the
workpiece origin offset, parameter, and current position.
Before starting the machine, therefore, determine which measurement units are being used. Attempting
to perform an operation with invalid data specified may damage the tool, the machine itself, the
workpiece, or cause injury to the user.
5.Constant surface speed control
When an axis subject to constant surface speed control approaches the origin of the workpiece
coordinate system, the spindle speed may become excessively high. Therefore, it is necessary to specify
a maximum allowable speed. Specifying the maximum allowable speed incorrectly may damage the
tool, the machine itself, the workpiece, or cause injury to the user.
s-5
SAFETY PRECAUTIONS B-63784EN/01
WARNING
6.Stroke check
After switching on the power, perform a manual reference position return as required. Stroke check is
not possible before manual reference position return is performed. Note that when stroke check is
disabled, an alarm is not issued even if a stroke limit is exceeded, possibly damaging the tool, the
machine itself, the workpiece, or causing injury to the user.
7. Tool post interference check
A tool post interference check is performed based on the tool data specified during automatic operation.
If the tool specification does not match the tool actually being used, the interference check cannot be
made correctly, possibly damaging the tool or the machine itself, or causing injury to the user.
After switching on the power, or after selecting a tool post manually, always start automatic operation
and specify the tool number of the tool to be used.
8. Absolute/incremental mode
If a program created with absolute values is run in incremental mode, or vice versa, the machine may
behave unexpectedly.
9.Plane selection
If an incorrect plane is specified for circular interpolation, helical interpolation, or a canned cycle, the
machine may behave unexpectedly. Refer to the descriptions of the respective functions for details.
10.Torque limit skip
Before attempting a torque limit skip, apply the torque limit. If a torque limit skip is specified without
the torque limit actually being applied, a move command will be executed without performing a skip.
11.Programmable mirror image
Note that programmed operations vary considerably when a programmable mirror image is enabled.
12.Compensation function
If a command based on the machine coordinate system or a reference position return command is issued
in compensation function mode, compensation is temporarily canceled, resulting in the unexpected
behavior of the machine.
Before issuing any of the above commands, therefore, always cancel compensation function mode.
s-6
B-63784EN/01 SAFETY PRECAUTIONS
WARNINGS AND CAUTIONS RELATED TO HANDLING
This section presents safety precautions related to the handling of machine tools. Before attempting to
operate your machine, read the supplied operator's manual and programming manual carefully, such
that you are fully familiar with their contents.
WARNING
1.Manual operation
When operating the machine manually, determine the current position of the tool and workpiece, and
ensure that the movement axis, direction, and feedrate have been specified correctly. Incorrect
operation of the machine may damage the tool, the machine itself, the workpiece, or cause injury to the
operator.
2.Manual reference position return
After switching on the power, perform manual reference position return as required.
If the machine is operated without first performing manual reference position return, it may behave
unexpectedly. Stroke check is not possible before manual reference position return is performed.
An unexpected operation of the machine may damage the tool, the machine itself, the workpiece, or
cause injury to the user.
3.Manual numeric command
When issuing a manual numeric command, determine the current position of the tool and workpiece,
and ensure that the movement axis, direction, and command have been specified correctly, and that the
entered values are valid.
Attempting to operate the machine with an invalid command specified may damage the tool, the
machine itself, the workpiece, or cause injury to the operator.
4.Manual handle feed
In manual handle feed, rotating the handle with a large scale factor, such as 100, applied causes the tool
and table to move rapidly. Careless handling may damage the tool and/or machine, or cause injury to
the user.
5.Disabled override
If override is disabled (according to the specification in a macro variable) during threading, rigid
tapping, or other tapping, the speed cannot be predicted, possibly damaging the tool, the machine itself,
the workpiece, or causing injury to the operator.
s-7
SAFETY PRECAUTIONS B-63784EN/01
WARNING
6.Origin/preset operation
Basically, never attempt an origin/preset operation when the machine is operating under the control of a
program. Otherwise, the machine may behave unexpectedly, possibly damaging the tool, the machine
itself, the tool, or causing injury to the user.
7.Workpiece coordinate system shift
Manual intervention, machine lock, or mirror imaging may shift the workpiece coordinate system.
Before attempting to operate the machine under the control of a program, confirm the coordinate system
carefully.
If the machine is operated under the control of a program without making allowances for any shift in the
workpiece coordinate system, the machine may behave unexpectedly, possibly damaging the tool, the
machine itself, the workpiece, or causing injury to the operator.
8.Software operator's panel and menu switches
Using the software operator's panel and menu switches, in combination with the MDI panel, it is
possible to specify operations not supported by the machine operator's panel, such as mode change,
override value change, and jog feed commands.
Note, however, that if the MDI panel keys are operated inadvertently, the machine may behave
unexpectedly, possibly damaging the tool, the machine itself, the workpiece, or causing injury to the
user.
9.Manual intervention
If manual intervention is performed during programmed operation of the machine, the tool path may
vary when the machine is restarted. Before restarting the machine after manual intervention, therefore,
confirm the settings of the manual absolute switches, parameters, and absolute/incremental command
mode.
10.Feed hold, override, and single block
The feed hold, feedrate override, and single block functions can be disabled using custom macro system
variable #3004. Be careful when operating the machine in this case.
11.Dry run
Usually, a dry run is used to confirm the operation of the machine. During a dry run, the machine
operates at dry run speed, which differs from the corresponding programmed feedrate. Note that the dry
run speed may sometimes be higher than the programmed feed rate.
s-8
B-63784EN/01 SAFETY PRECAUTIONS
WARNING
12.Cutter and tool nose radius compensation in MDI mode
Pay careful attention to a tool path specified by a command in MDI mode, because cutter or tool nose
radius compensation is not applied. When a command is entered from the MDI to interrupt in automatic
operation in cutter or tool nose radius compensation mode, pay particular attention to the tool path when
automatic operation is subsequently resumed. Refer to the descriptions of the corresponding functions
for details.
13.Program editing
If the machine is stopped, after which the machining program is edited (modification, insertion, or
deletion), the machine may behave unexpectedly if machining is resumed under the control of that
program. Basically, do not modify, insert, or delete commands from a machining program while it is in
use.
s-9
SAFETY PRECAUTIONS B-63784EN/01
WARNINGS RELATED TO DAILY MAINTENANCE
WARNING
1.Memory backup battery replacement
When replacing the memory backup batteries, keep the power to the machine (CNC) turned on, and
apply an emergency stop to the machine. Because this work is performed with the power on and the
cabinet open, only those personnel who have received approved safety and maintenance training may
perform this work.
When replacing the batteries, be careful not to touch the high-voltage circuits (marked
with an insulating cover).
Touching the uncovered high-voltage circuits presents an extremely dangerous electric shock hazard.
NOTE
The CNC uses batteries to preserve the contents of its memory, because it must retain data such as
programs, offsets, and parameters even while external power is not applied.
If the battery voltage drops, a low battery voltage alarm is displayed on the machine operator's panel or
screen.
When a low battery voltage alarm is displayed, replace the batteries within a week. Otherwise, the
contents of the CNC's memory will be lost.
Refer to the Maintenance manual for details of the battery replacement procedure.
and fitted
s-10
B-63784EN/01 SAFETY PRECAUTIONS
WARNING
2.Absolute pulse coder battery replacement
When replacing the memory backup batteries, keep the power to the machine (CNC) turned on, and
apply an emergency stop to the machine. Because this work is performed with the power on and the
cabinet open, only those personnel who have received approved safety and maintenance training may
perform this work.
When replacing the batteries, be careful not to touch the high-voltage circuits (marked
and fitted
with an insulating cover).
Touching the uncovered high-voltage circuits presents an extremely dangerous electric shock hazard.
NOTE
The absolute pulse coder uses batteries to preserve its absolute position.
If the battery voltage drops, a low battery voltage alarm is displayed on the machine operator's panel or
screen.
When a low battery voltage alarm is displayed, replace the batteries within a week. Otherwise, the
absolute position data held by the pulse coder will be lost.
Refer to the Maintenance manual for details of the battery replacement procedure.
s-11
SAFETY PRECAUTIONS B-63784EN/01
WARNING
3.Fuse replacement
For some units, the chapter covering daily maintenance in the operator's manual or programming
manual describes the fuse replacement procedure.
Before replacing a blown fuse, however, it is necessary to locate and remove the cause of the blown
fuse.
For this reason, only those personnel who have received approved safety and maintenance training may
perform this work.
When replacing a fuse with the cabinet open, be careful not to touch the high-voltage circuits (marked
and fitted with an insulating cover).
Touching an uncovered high-voltage circuit presents an extremely dangerous electric shock hazard.
s-12
B-63784EN/01 TABLE OF CONTENTS
TABLE OF CONTENTS
SAFETY PRECAUTIONS.......................................................................... s-1
I. GENERAL
1 GENERAL ..............................................................................................3
1.1 GENERAL FLOW OF OPERATION OF CNC MACHINE TOOL ...................5
1.2 NOTES ON READING THIS MANUAL..........................................................7
II PROGRAMING
1 GENERAL ............................................................................................11
1.1 TOOL MOVEMENT ALONG WORKPIECE PARTS
FIGURE-INTERPOLATION .........................................................................12
1.2 FEED-FEED FUNCTION .............................................................................14
1.3 PART DRAWING AND TOOL MOVEMENT................................................15
1.3.1 Reference Position (Machine-Specific Position) .................................................. 15
1.3.2 Coordinate System on Part Drawing and Coordinate System Specified
by CNC – Coordinate System................................................................................ 16
1.3.3 How to Indicate Command Dimensions for Moving the Tool –
Absolute, Incremental Commands......................................................................... 19
1.4 CUTTING SPEED - SPINDLE SPEED FUNCTION.....................................21
1.5 SELECTION OF TOOL USED FOR VARIOUS MACHINING –
TOOL FUNCTION........................................................................................22
1.6 COMMAND FOR MACHINE OPERATIONS - MISCELLANEOUS
FUNCTION ..................................................................................................23
1.7 PROGRAM CONFIGURATION ...................................................................24
1.8 TOOL FIGURE AND TOOL MOTION BY PROGRAM.................................27
1.9 TOOL MOVEMENT RANGE - STROKE......................................................28
2 CONROLLED AXES ............................................................................29
2.1 CONTROLLED AXES..................................................................................30
2.2 AXIS NAME .................................................................................................31
2.3 INCREMENT SYSTEM................................................................................32
2.4 MAXIMUM STROKE....................................................................................34
3 PREPARATORY FUNCTION (G FUNCTION)......................................35
c-1

TABLE OF CONTENTS B-63784EN/01
4 INTERPOLATION FUNCTIONS...........................................................39
4.1 POSITIONING (G00) ...................................................................................40
4.2 SINGLE DIRECTION POSITIONING (G60) ................................................42
4.3 LINEAR INTERPOLATION (G01)................................................................44
4.4 CIRCULAR INTERPOLATION (G02,G03)...................................................46
4.5 HELICAL INTERPOLATION (G02,G03) ......................................................51
4.6 HELICAL INTERPOLATION B (G02,G03)...................................................53
4.7 HYPOTHETICAL AXIS INTERPOLATION (G07) ........................................54
4.8 POLAR COORDINATE INTERPOLATION (G12.1,G13.1) ..........................57
4.8.1 Virtual Axis Direction Compensation for Polar Coordinate Interpolation ........... 62
4.9 CYLINDRICAL INTERPOLATION (G07.1) ..................................................64
4.10 CYLINDRICAL INTERPOLATION CUTTING POINT CONTROL (G07.1)...68
4.11 EXPONENTIAL INTERPOLATION (G02.3,G03.3)......................................82
4.12 INVOLUTE INTERPOLATION (G02.2,G03.2) .............................................90
4.12.1 Involute Interpolation with a Linear Axis and Rotation Axis (G02.2,G03.3)....... 95
4.13 HELICAL INVOLUTE INTERPOLATION (G02.2,G03.3) .............................98
4.14 SPLINE INTERPOLATION (G06.1) .............................................................99
4.15 SPIRAL INTERPOLATION, CONICAL INTERPOLATION (G02,G03) ......106
4.16 SMOOTH INTERPOLATION (G05.1) ........................................................115
4.17 NURBS INTERPOLATION (G06.2) ...........................................................121
4.17.1 NURBS Interpolation Additional Functions ....................................................... 134
4.18 3-DIMENSIONAL CIRCULAR INTERPOLATION (G02.4 AND G03.4) .....141
4.19 THREADING (G33)....................................................................................145
4.20 INCH THREADING (G33)..........................................................................148
4.21 CONTINUOUS THREADING (G33)...........................................................149
5 FEED FUNCTIONS ............................................................................150
5.1 GENERAL..................................................................................................151
5.2 RAPID TRAVERSE....................................................................................153
5.3 CUTTING FEED ........................................................................................154
5.4 OVERRIDE ................................................................................................160
5.4.1 Feedrate Override ................................................................................................ 160
5.4.2 Rapid Traverse Override ..................................................................................... 161
5.5 CUTTING FEEDRATE CONTROL ............................................................162
5.5.1 Exact Stop (G09, G61)Cutting Mode (G64)Tapping Mode (G63)..................... 163
5.5.2 Automatic Corner Override................................................................................. 164
5.5.2.1 Automatic override for inner corners (G62).....................................................164
5.5.2.2 Circular cutting feedrate change....................................................................... 167
c-2

B-63784EN/01 TABLE OF CONTENTS
5.6 AUTOMATIC VELOCITY CONTROL ........................................................168
5.6.1 Automatic Velocity Vontrol during Involute Interpolation................................. 168
5.6.2 Automatic Velocity Control during Polar Coordinate Interpolation................... 171
5.7 DWELL ......................................................................................................173
5.8 FEEDRATE SPECIFICATION ON A VIRTUAL CIRCLE
FOR A ROTARY AXIS...............................................................................174
5.9 AUTOMATIC FEEDRATE CONTROL BY AREA.......................................178
6 REFERENCE POSITION....................................................................181
6.1 REFERENCE POSITION RETURN...........................................................182
6.2 FLOATING REFERENCE POSITION RETURN (G30.1)...........................186
7 COORDINATE SYSTEM....................................................................188
7.1 MACHINE COORDINATE SYSTEM..........................................................189
7.2 WORKPIECE COORDINATE SYSTEM ....................................................191
7.2.1 Setting a Workpiece Coordinate System (G92) .................................................. 192
7.2.2 Setting Workpiece Coordinate System (G54 to G59) ......................................... 193
7.2.3 Selecting Workpiece Coordinate System(G54 to G59)....................................... 195
7.2.4 Changing Workpiece Coordinate System............................................................ 196
7.2.5 Adding Workpiece Coordinate Systems (G54.1) ................................................ 199
7.2.6 Workpiece Coordinate System Preset (G92.1).................................................... 201
7.2.7 Automatically Presetting the Workpiece Coordinate System ............................. 203
7.3 LOCAL COORDINATE SYSTEM ..............................................................204
7.4 PLANE SELECTION..................................................................................206
7.5 PLANE CONVERSION FUNCTION...........................................................207
8 COORDINATE VALUE AND DIMENSION .........................................213
8.1 ABSOLUTE AND INCREMENTAL PROGRAMMING................................214
8.2 POLAR COORDINATE COMMAND (G15,G16) ........................................215
8.3 INCH/METRIC CONVERSION (G20,G21) ................................................218
8.4 DECIMAL POINT INPUT/POCKET CALCULATOR TYPE DECIMAL
POINT INPUT ............................................................................................219
8.5 DIAMETER AND RADIUS PROGRAMMING ............................................221
8.6 PROGRAMMABLE SWITCHING OF DIAMETER/RADIUS
SPECIFICATION .......................................................................................222
9 SPINDLE SPEED FUNCTION (S FUNCTION)...................................224
9.1 SPECIFYING THE SPINDLE SPEED WITH A CODE ..............................225
9.2 CONSTANT SURFACE SPEED CONTROL (G96, G97) ..........................226
9.3 SPINDLE POSITIONING FUNCTION........................................................231
c-3

TABLE OF CONTENTS B-63784EN/01
9.3.1 Spindle Positioning.............................................................................................. 233
9.3.2 Orientation........................................................................................................... 234
9.3.3 Canceling the Spindle Positioning Mode ............................................................ 235
9.4 SPINDLE SPEED FLUCTUATION DETECTION (G26, G25)....................237
10 TOOL FUNCTION (T FUNCTION) .....................................................243
10.1 TOOL SELECTION FUNCTION ................................................................244
10.2 TOOL LIFE MANAGEMENT FUNCTION ..................................................245
10.2.1 Tool Life Management Data................................................................................ 246
10.2.2 Register, Change and Delete of Tool Life Management Data ............................ 247
10.2.3 Tool Life Management Command in a Machining Program............................... 250
10.2.4 Tool Service Life Count and Tool Selection....................................................... 255
10.2.5 Tool Life Count Restart M Code......................................................................... 257
11 AUXILIARY FUNCTION .....................................................................258
11.1 AUXILIARY FUNCTION (M FUNCTION)...................................................259
11.2 MULTIPLE M COMMANDS IN A SINGLE BLOCK....................................261
11.3 SECOND AUXILIARY FUNCTIONS ..........................................................262
12 PROGRAM CONFIGURATION ..........................................................263
12.1 PROGRAM SECTION CONFIGURATION ................................................265
12.2 SUBPROGRAM (M98, M99)......................................................................271
12.3 PROGRAM NUMBER................................................................................275
12.4 PROGRAM COMPONENTS OTHER THAN PROGRAM SECTIONS.......276
12.5 EXTERNAL DEVICE SUBPROGRAM CALL (M198) ................................279
13 FUNCTIONS TO SIMPLIFY PROGRAMMING...................................281
13.1 CANNED CYCLE.......................................................................................282
13.1.1 High-speed Peck Drilling Cycle (G73)................................................................ 288
13.1.2 Left-handed Tapping Cycle (G74) ...................................................................... 290
13.1.3 Fine Boring Cycle (G76) ..................................................................................... 293
13.1.4 Drilling Cycle, Spot Drilling (G81)..................................................................... 296
13.1.5 Drilling Cycle Counter Boring Cycle (G82) ....................................................... 298
13.1.6 Peck Drilling Cycle (G83)................................................................................... 300
13.1.7 Tapping Cycle (G84)........................................................................................... 302
13.1.8 Boring Cycle (G85) ............................................................................................. 305
13.1.9 Boring Cycle (G86) ............................................................................................. 307
13.1.10 Boring Cycle/Back Boring Cycle (G87).............................................................. 309
13.1.11 Boring Cycle (G88) ............................................................................................. 314
13.1.12 Boring Cycle (G89) ............................................................................................. 316
c-4

B-63784EN/01 TABLE OF CONTENTS
13.1.13 Canned Cycle Cancel (G80) ................................................................................ 318
13.1.14 Example of Canned Cycle ................................................................................... 319
13.2 RIGID TAPPING ........................................................................................321
13.2.1 Rigid Tapping (G84.2) ........................................................................................ 322
13.2.2 Left-handed Rigid Tapping Cycle (G84.3).......................................................... 325
13.2.3 Rigid tapping Orientation Function..................................................................... 328
13.2.4 Peck Rigid Tapping Cycle (G84 or G74) ............................................................ 330
13.2.5 Three-dimensional rigid tapping ......................................................................... 332
13.3 EXTERNAL MOTION FUNCTION (G81) ...................................................334
13.4 OPTIONAL ANGLE CHAMFERING AND CORNER ROUNDING .............335
13.5 PROGRAMMABLE MIRROR IMAGE (G50.1, G51.1) ...............................339
13.6 INDEX TABLE INDEXING FUNCTION......................................................344
13.7 FIGURE COPY (G72.1,G72.2) ..................................................................347
13.8 NORMAL DIRECTION CONTROL (G40.1, G41.1, G42.1)........................355
13.9 THREE-DIMENSIONAL COORDINATE CONVERSION (G68,G69) .........359
13.9.1 Three-dimensional Coordinate Conversion and Parallel Axis Control............... 370
13.10 TILTED WORKING PLANE COMMAND ...................................................371
14 COMPENSATION FUNCTION ...........................................................390
14.1 TOOL LENGTH OFFSET (G43,G44,G49).................................................391
14.1.1 General................................................................................................................. 392
14.2 TOOL OFFSET(G45-G48).........................................................................395
14.3 OVERVIEW OF CUTTER COMPENSATION C (G40 - G42) ....................400
14.4 DETAILS OF CUTTER COMPENSATION C.............................................406
14.4.1 General................................................................................................................. 407
14.4.2 Tool Movement in Start-up ................................................................................. 411
14.4.3 Tool Movement in the Offset Mode.................................................................... 418
14.4.4 Tool Movement in Offset Mode Cancel.............................................................. 439
14.4.5 Overcutting by Cutter Compensation .................................................................. 447
14.4.6 Interference Check............................................................................................... 451
14.4.7 Cutter Compensation by Input from MDI ........................................................... 466
14.4.8 Vector Holding (G38).......................................................................................... 468
14.4.9 Corner Circular Interpolation (G39).................................................................... 470
14.5 THREE-DIMENSIONAL TOOL COMPENSATION (G40, G41) .................473
14.6 TOOL COMPENSATION VALUES............................................................479
14.6.1 Tool Compensation Memory A........................................................................... 481
14.6.2 Tool Compensation Memory B ........................................................................... 481
14.6.3 Tool Compensation Memory C ........................................................................... 481
c-5

TABLE OF CONTENTS B-63784EN/01
14.7 NUMBER OF TOOL COMPENSATION SETTINGS..................................482
14.8 CHANGING THE TOOL COMPENSATION AMOUNT ..............................483
14.9 SCALING (G50,G51) .................................................................................484
14.10 COORDINATE SYSTEM ROTATION (G68,G69)......................................490
14.11 TOOL OFFSETS BASED ON TOOL NUMBERS ......................................496
14.11.1 Tool Data Registration, Modification, and Deletion........................................... 497
14.11.2 Tool Offset Based on Tool Numbers................................................................... 499
14.11.3 Relationships with Other Functions .................................................................... 503
14.12 TOOL AXIS DIRECTION TOOL LENGTH COMPENSATION...................505
14.13 ROTARY TABLE DYNAMIC FIXTURE OFFSET.......................................512
14.14 THREE-DIMENSIONAL CUTTER COMPENSATION ...............................519
14.14.1 Tool Side Compensation ..................................................................................... 520
14.14.2 Leading Edge Offset ............................................................................................ 536
14.14.3 Three-dimensional Cutter Compensation at Tool Center Point .......................... 544
14.15 DESIGNATION DIRECTION TOOL LENGHT COMPENSATION .............549
14.16 TOOL CENTER POINT CONTROL...........................................................556
14.16.1 Tool Center Point Control for 5-Axis Machining ............................................... 565
14.17 CONTROL POINT COMPENSATION OF TOOL LENGTH
COMPENSATION ALONG TOOL AXIS AND TOOL CENTER
POINT CONTROL .....................................................................................584
14.18 GRINDING WHEEL WEAR COMPENSATION .........................................588
14.19 CUTTER COMPENSATION FOR ROTARY TABLE .................................597
14.20 THREE-DIMENSIONAL CUTTER COMPENSATION FOR ROTARY
TABLE .......................................................................................................602
15 PROGRAMMABLE PARAMETER INPUT (G10) ...............................608
16 MEASUREMENT FUNCTIOM............................................................610
16.1 SKIP FUNCTION (G31) .............................................................................611
16.2 SKIPPING THE COMMANDS FOR SEVERAL AXES...............................614
16.3 HIGH SPEED SKIP SIGNAL (G31) ...........................................................615
16.4 MULTISTAGE SKIP (G31.1 TO G31.4).....................................................616
16.5 AUTOMATIC TOOL LENGTH MEASUREMENT (G37) ............................618
16.6 TORQUE LIMIT SKIP ................................................................................622
17 CUSTOM MACRO..............................................................................626
17.1 VARIABLES...............................................................................................627
17.2 SYSTEM VARIABLES ...............................................................................632
17.3 ARITHMETIC COMMANDS.......................................................................662
c-6

B-63784EN/01 TABLE OF CONTENTS
17.4 MACRO STATEMENTS AND NC STATEMENTS.....................................668
17.5 BRANCH AND REPETITION.....................................................................669
17.5.1 Unconditional Branch (GOTO Statement).......................................................... 669
17.5.2 Conditional Branch (IF Statement)...................................................................... 670
17.5.3 Repetition (While Statement).............................................................................. 672
17.6 MACRO CALL............................................................................................675
17.6.1 Simple Call (G65)................................................................................................ 676
17.6.2 Modal Call : Move Command Call (G66)........................................................... 682
17.6.3 Modal Call : Per-Block Call (G66.1)................................................................... 685
17.6.4 Macro Call Using G Code ................................................................................... 686
17.6.5 Macro Calls with G Codes (Specification of Multiple G Codes) ....................... 688
17.6.6 Macro Calls with G Codes with the Decimal Point
(Specification of Multiple G Codes) ................................................................... 689
17.6.7 Macro Call Using an M Code.............................................................................. 690
17.6.8 Macro Calls with M Codes with the Decimal Point
(Specification of Multiple G Codes) ................................................................... 691
17.6.9 Subprogram Call Using an M Code..................................................................... 692
17.6.10 Subprogram Call Using an M Code (Specification of Multiple G Codes).......... 693
17.6.11 Subprogram Calls Using a T Code ...................................................................... 694
17.6.12 Subprogram Calls Using a S Code ...................................................................... 695
17.6.13 Subprogram Calls Using a 2nd Auxiliary Function Code................................... 696
17.6.14 Sample Program................................................................................................... 697
17.7 PROCESSING MACRO STATEMENTS....................................................699
17.8 REGISTERING CUSTOM MACRO PROGRAMS .....................................701
17.9 CODES AND RESERVED WORDS USED IN CUSTOM MACROS .........702
17.10 WRITE-PROTECTING COMMON VARIABLES........................................704
17.11 DISPLAYING A MACRO ALARM AND MACRO MESSAGE
IN JAPANESE............................................................................................705
17.12 EXTERNAL OUTPUT COMMANDS..........................................................706
17.13 LIMITATIONS ............................................................................................711
17.14 INTERRUPTION TYPE CUSTOM MACRO...............................................713
17.14.1 Specification Method........................................................................................... 714
17.14.2 Details of Functions............................................................................................. 715
18 HIGH-SPEED CUTTING FUNCTICNS ...............................................725
18.1 MULTIBUFFER (G05.1).............................................................................726
18.2 DECELERATION BASED ON ACCELERATION DURING CIRCULAR
INTERPOLATION ......................................................................................730
c-7

TABLE OF CONTENTS B-63784EN/01
18.3 ADVANCED PREVIEW CONTROL(G05.1)...............................................732
18.4 LOOK-AHEAD ACCELERATION/DECELERATION BEFORE
INTERPOLATION (G05.1).........................................................................733
18.4.1 Bell-Shaped Acceleration/Deceleration Time Constant Change ........................ 736
18.5 FINE HPCC (G05.1) ..................................................................................743
18.6 MACHINING TYPE IN HPCC SCREEN PROGRAMMING
(G05.1 OR G10).........................................................................................746
18.7 JERK CONTROL .......................................................................................748
19 AXIS CONTROL FUNCTIONS...........................................................750
19.1 AXIS INTERCHANGE................................................................................751
19.2 TWIN TABLE CONTROL...........................................................................754
19.2.1 Tool Length Compensation in Tool Axis Direction with Twin Table Control... 758
19.3 SYNCHRONIZATION CONTROL..............................................................761
19.4 TANDEM CONTROL .................................................................................762
19.5 CHOPPING FUNCTION (G80,G81.1) .......................................................763
19.6 PARALLEL AXIS CONTROL .....................................................................770
19.7 ROTARY AXIS ROLL-OVER .....................................................................775
19.8 MULTIPLE ROTARY CONTROL AXIS FUNCTION ..................................777
19.9 ELECTRONIC GEAR BOX (G80, G81, G80.5, G81.5)..............................779
19.9.1 Command Specification (G80.5, G81.5)............................................................. 780
19.9.2 Command Specification Compatible with Hobbing Machine (G80,G81) .......... 782
19.9.3 Example of Controlled Axis Configuration ........................................................ 785
19.9.4 Sample Programs................................................................................................. 786
19.9.5 Synchronization Ratio Specification Range........................................................ 790
19.9.6 Retract Function .................................................................................................. 795
19.9.7 Electronic Gear Box Automatic Phase Synchronization..................................... 797
19.10 SKIP FUNCTION FOR EGB AXIS (G31.8)................................................801
19.11 TOOL WITHDRAWAL AND RETURN (G10.6)..........................................803
19.12 HIGH SPEED HRV MODE ........................................................................806
APPENDIX
A TAPE CODE LIST ..............................................................................811
B LIST OF FUNCTION AND TAPE FORMAT........................................814
C RANGE OF COMMAND VALUE ........................................................819
D NOMOGRAPHS .................................................................................823
D.1 INCORRECT THREADED LENGTH .........................................................824
c-8

B-63784EN/01 TABLE OF CONTENTS
D.2 SIMPLE CALCULATION OF INCORRECT THREAD LENGTH ................826
D.3 TOOL PATH AT CORNER ........................................................................828
D.4 RADIUS DIRECTION ERROR AT CIRCLE CUTTING ..............................831
E TABLE OF KANJI AND HIRAGANA CODES ....................................832
F ALARM LIST ......................................................................................840
F.1 PS ALARM (ALARMS RELATED TO PROGRAM)....................................841
F.2 BG ALARM (ALARMS RELATED TO BACKGROUND EDIT)...................856
F.3 SR ALARM.................................................................................................858
F.4 SW ALARM (ALARMS RELATED TO PARAMETER WRITING) ..............860
F.5 SV ALARM (ALARMS RELATED TO SERVO)..........................................861
F.6 OT ALARM ................................................................................................865
F.7 IO ALARM..................................................................................................867
F.8 PW ALARM (POWER MUST BE TURNED OFF THEN ON AGAIN) ........867
F.9 SP ALARM (ALARMS RELATED TO SPINDLE).......................................868
F.10 OH ALARM (ALARMS RELATED TO OVERHEAT)..................................872
c-9


I. GENERAL

B-63784EN/01 GENERAL 1.GENERAL
1 GENERAL
Operator’s Manuals consist of the PROGRAMMING Manual and
OPERATION Manual.
About this Operator’s Manual
OPERATOR’S MANUAL (PROGRAMMING) (B-63784EN)
I. GENERAL
Describes chapter organization, applicable models, related
manuals, and notes for reading this manual.
II. PROGRAMMING
Describes each function: Format used to program functions in the
NC language, characteristics, and restrictions.
APPENDIX
Lists tape codes, valid data ranges, and alarms.
OPERATOR’S MANUAL (OPERATION) (B-63784EN-1)
I. GENERAL
Describes chapter organization, applicable models, related
manuals, and notes for reading this manual.
II. OPERATION
Describes the manual operation and automatic operation of a
machine, procedures for inputting and outputting data, and
procedures for editing a program.
III. MAINTENANCE
Describes investigation of trouble generation situation.
APPENDIX
Status when turning power on, when reset
Some functions described in this manual may not be applied to some
products. For detail, refer to the DESCRIPTIONS manual(B63782EN).
Applicable product name
This manual does not describe parameters in detail. For details on
parameters mentioned in this manual, refer to the manual for
parameters (B-63790EN).
This manual describes all optional functions. Look up the options
incorporated into your system in the manual written by the machine
tool builder.
The models covered by this manual, and their abbreviations are:
Product name Abbreviations
FANUC Series 15i-MB 15i-MB Series 15i
FANUC Series 150i-MB 150i-MB Series 150i
- 3 -
1.GENERAL GENERAL B-63784EN/01
Special symbols
This manual uses the following symbols:
P_ : Indicates a combination of axes such as X__ Y__ Z (used in
PROGRAMMING.).
; : Indicates the end of a block. It actually corresponds to the ISO
code LF or EIA code CR.
Related manuals
The table below lists manuals related to MODEL B of Series 15i, and
Series 150i. In the table, this manual is marked with an asterisk (*).
Table 1 (a) Related Manuals
Manual name
DESCRIPTIONS B-63782EN
CONNECTION MANUAL (HARDWARE) B-63783EN
CONNECTION MANUAL (FUNCTION) B-63783EN-1
OPERATOR'S MANUAL (PROGRAMMING) B-63784EN *
OPERATOR'S MANUAL (OPERATION) B-63784EN-1
MAINTENANCE MANUAL B-63785EN
PARAMETER MANUAL B-63790EN
Specification
number
- 4 -
B-63784EN/01 GENERAL 1.GENERAL
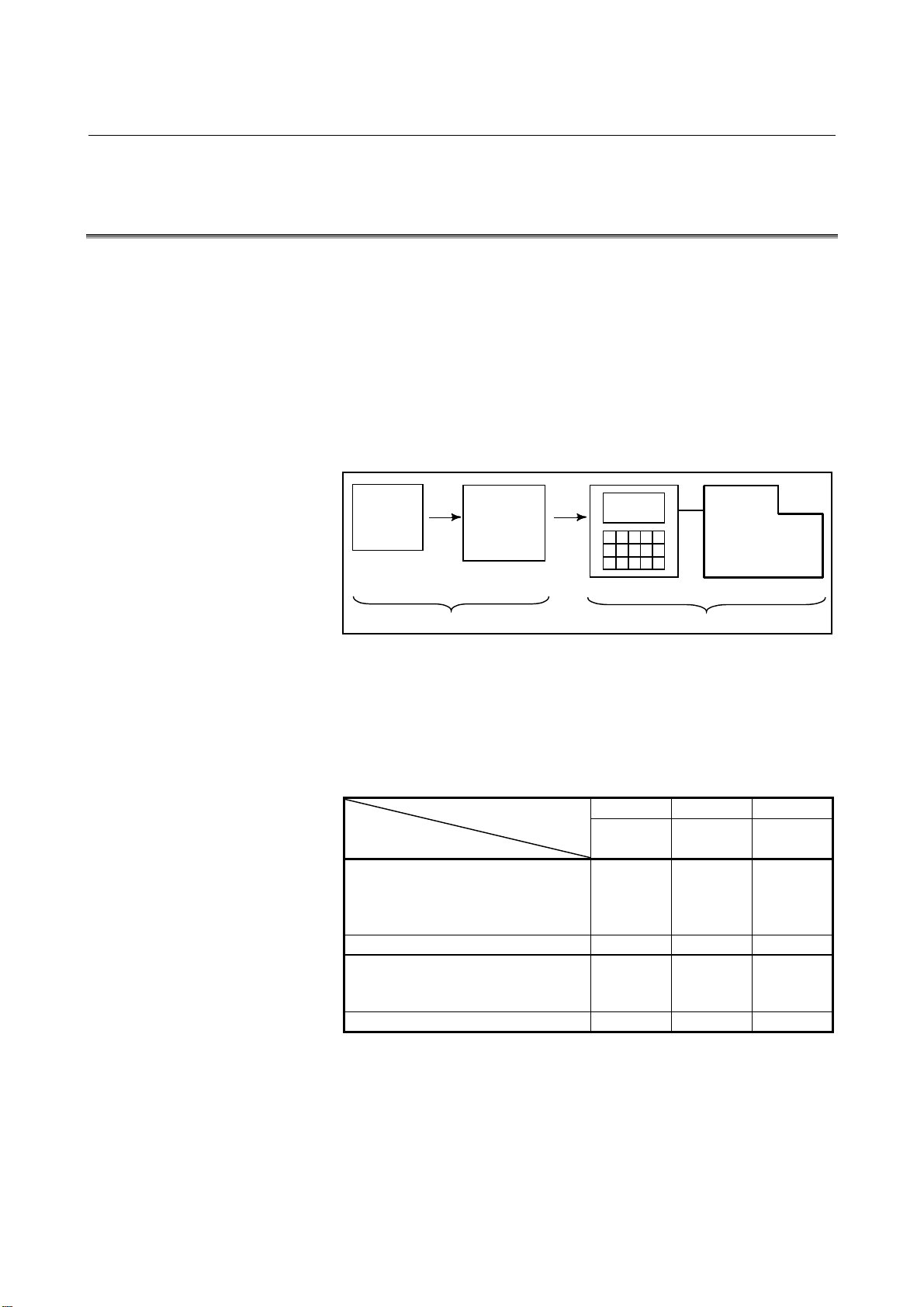
1.1 GENERAL FLOW OF OPERATION OF CNC MACHINE
TOOL
When machining the part using the CNC machine tool, first prepare the
program, then operate the CNC machine by using the program.
(1) First, prepare the program from a part drawing to operate the CNC
machine tool. How to prepare the program is described in the
OPERATOR’S MANUAL (PROGRAMMING).
(2) The program is to be read into the CNC system. Then, mount the
workpieces and tools on the machine, and operate the tools
according to the programming. Finally, execute the machining
actually. How to operate the CNC system is described in the
OPERATOR’S MANUAL (OPERATION).
Part
drawing
PROGRAMMING
Part
programming
CNC MACHINE TOOL
OPERATION
Before the actual programming, make the machining plan for how to
machine the part.
Machining plan-
1. Determination of workpieces machining range
2. Method of mounting workpieces on the machine tool
3. Machining sequence in every machining process
4. Machining tools and machining
Decide the machining method in every machining process.
Machining process
Machining procedure
1. Machining method :
Rough
Semi
Finish
2. Machining tools
3. Machining conditions :
Feedrate
Cutting depth
4. Tool path
123
Feed
cutting
Side
cutting
Hole
machining
- 5 -
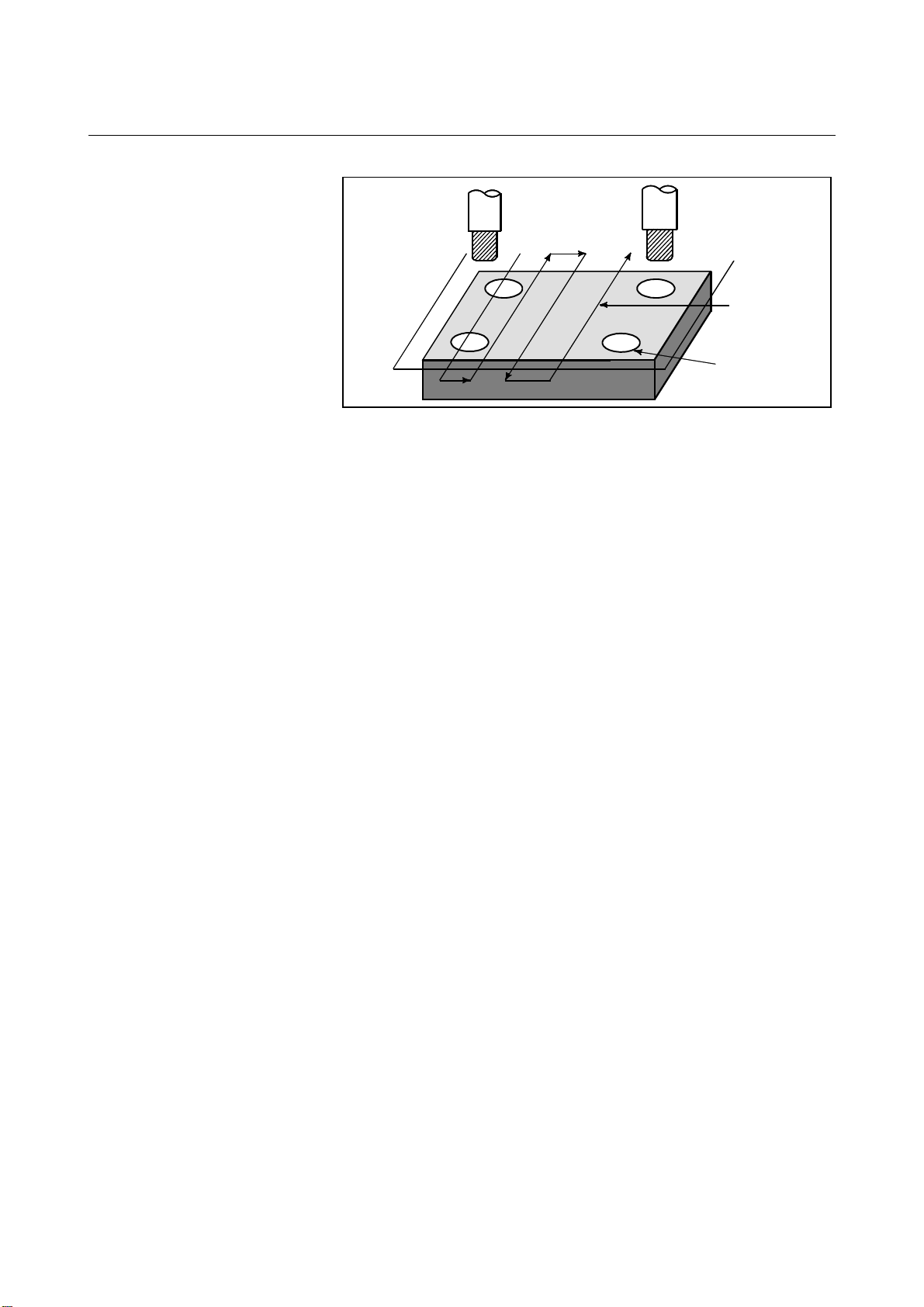
1.GENERAL GENERAL B-63784EN/01
Tool
Side cutting
Face cutting
Hole machining
Prepare the program of the tool path and machining condition
according to the workpiece figure, for each machining.
- 6 -
 Loading...
Loading...