


 Loading...
Loading...Features
•High Performance, Low Power AVR® 8-Bit Microcontroller
•Advanced RISC Architecture
–135 Powerful Instructions – Most Single Clock Cycle Execution
–32 x 8 General Purpose Working Registers
–Fully Static Operation
–Up to 16 MIPS Throughput at 16 MHz
–On-Chip 2-cycle Multiplier
•Non-volatile Program and Data Memories
–64/128K Bytes of In-System Self-Programmable Flash
•Endurance: 100,000 Write/Erase Cycles
–Optional Boot Code Section with Independent Lock Bits
•In-System Programming by On-chip Boot Program hardware activated after reset
•True Read-While-Write Operation
–2K/4K (64K/128K Flash version) Bytes EEPROM
•Endurance: 100,000 Write/Erase Cycles
–4K/8K (64K/128K Flash version) Bytes Internal SRAM
–Up to 64K Bytes Optional External Memory Space
–Programming Lock for Software Security
•JTAG (IEEE std. 1149.1 compliant) Interface
–Boundary-scan Capabilities According to the JTAG Standard
–Extensive On-chip Debug Support
–Programming of Flash, EEPROM, Fuses, and Lock Bits through the JTAG Interface
•USB 2.0 Full-speed/Low-speed Device and On-The-Go Module
–Complies fully with:
–Universal Serial Bus Specification REV 2.0
–On-The-Go Supplement to the USB 2.0 Specification Rev 1.0
–Supports data transfer rates up to 12 Mbit/s and 1.5 Mbit/s
•USB Full-speed/Low Speed Device Module with Interrupt on Transfer Completion
–Endpoint 0 for Control Transfers : up to 64-bytes
–6 Programmable Endpoints with IN or Out Directions and with Bulk, Interrupt or Isochronous Transfers
–Configurable Endpoints size up to 256 bytes in double bank mode
–Fully independant 832 bytes USB DPRAM for endpoint memory allocation
–Suspend/Resume Interrupts
–Power-on Reset and USB Bus Reset
–48 MHz PLL for Full-speed Bus Operation
–USB Bus Disconnection on Microcontroller Request
•USB OTG:
–Supports Host Negotiation Protocol (HNP) and Session Request Protocol (SRP) for OTG dual-role devices
–Provide Status and control signals for software implementation of HNP and SRP
–Provides programmable times required for HNP and SRP
•Peripheral Features
–Two 8-bit Timer/Counters with Separate Prescaler and Compare Mode
–Two16-bit Timer/Counter with Separate Prescaler, Compareand Capture Mode
–Real Time Counter with Separate Oscillator
–Two 8-bit PWM Channels
8-bit  Microcontroller with
Microcontroller with
64/128K Bytes of ISP Flash and USB Controller
AT90USB646
AT90USB647
AT90USB1286
AT90USB1287
Preliminary
7593D–AVR–07/06

–Six PWM Channels with Programmable Resolution from 2 to 16 Bits
–Output Compare Modulator
–8-channels, 10-bit ADC
–Programmable Serial USART
–Master/Slave SPI Serial Interface
–Byte Oriented 2-wire Serial Interface
–Programmable Watchdog Timer with Separate On-chip Oscillator
–On-chip Analog Comparator
–Interrupt and Wake-up on Pin Change
•Special Microcontroller Features
–Power-on Reset and Programmable Brown-out Detection
–Internal Calibrated Oscillator
–External and Internal Interrupt Sources
–Six Sleep Modes: Idle, ADC Noise Reduction, Power-save, Power-down, Standby, and Extended Standby
•I/O and Packages
–48 Programmable I/O Lines
–64-lead TQFP and 64-lead QFN
•Operating Voltages
–2.7 - 5.5V
–2.2 - 5.5V (Check availabilty)
•Operating temperature
–Industrial (-40°C to +85°C)
•Maximum Frequency
–8 MHz at 2.7V - Industrial range
–16 MHz at 4.5V - Industrial range
2 AT90USB64/128 
7593D–AVR–07/06
 AT90USB64/128
AT90USB64/128
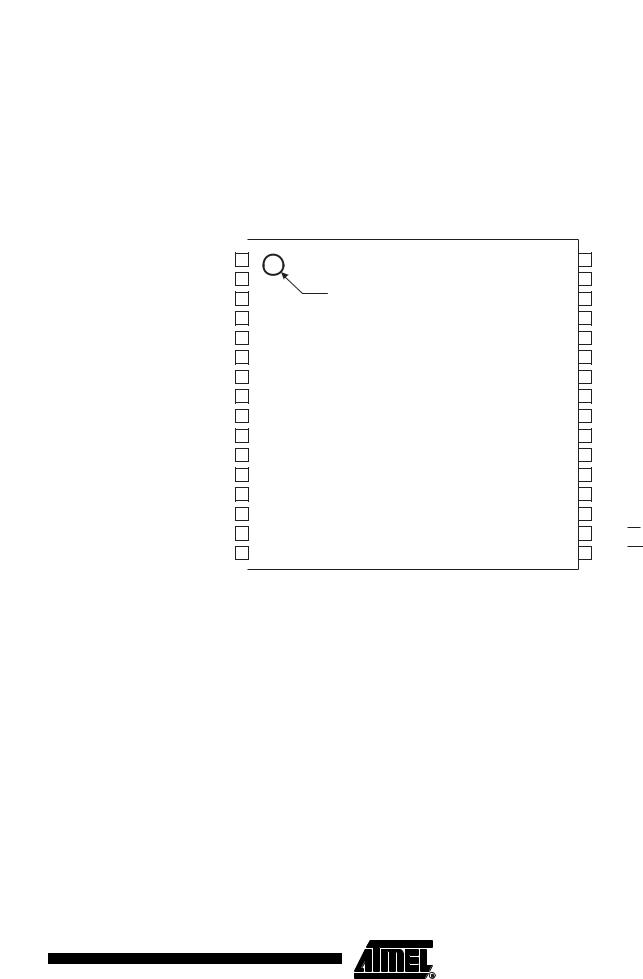
1. Pin Configurations
Figure 1-1. Pinout AT90USB64/128-TQFP
|
|
(INT.6/AIN.0) PE6 |
1 |
|
|
(INT.7/AIN.1/UVcon) PE7 |
2 |
|
|
UVcc |
3 |
|
|
D- |
4 |
D+ |
5 |
|
|
UGnd |
6 |
|
|
|
|
UCap |
7 |
|
|
|
|
VBus |
8 |
|
|
|
|
(IUID) PE3 |
9 |
|
|
(SS/PCINT0) PB0 |
10 |
|
|
|
|
(PCINT1/SCLK) PB1 |
11 |
|
|
(PDI/PCINT2/MOSI) PB2 |
12 |
|
|
|
|
(PDO/PCINT3/MISO) PB3 |
13 |
|
|
|
|
(PCINT4/OC.2A) PB4 |
14 |
|
|
|
|
(PCINT5/OC.1A) PB5 |
15 |
|
|
|
|
(PCINT6/OC.1B) PB6 |
16 |
|
|
|
|
AVCC |
|
GND |
|
AREF |
|
PF0(ADC0) |
|
PF1(ADC1) |
|
PF2(ADC2) |
|
PF3(ADC3) |
|
PF4(ADC4/TCK) |
|
PF5(ADC5/TMS) |
|
PF6(ADC6/TDO) |
|
PF7(ADC7/TDI) |
|
GND |
|
VCC |
|
PA0(AD0) |
|
PA1(AD1) |
|
PA2(AD2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
64 |
|
63 |
|
62 |
|
61 |
|
60 |
|
59 |
|
58 |
|
57 |
|
56 |
|
55 |
|
54 |
|
53 |
|
52 |
|
51 |
|
50 |
|
49 |
INDEX CORNER
AVR USB
TQFP64
17 |
|
18 |
|
19 |
|
20 |
|
21 |
|
22 |
|
23 |
|
24 |
|
25 |
|
26 |
|
27 |
|
28 |
|
29 |
|
30 |
|
31 |
|
32 |
(PCINT7/OC.0A/OC.1C)PB7 |
|
(INT4/TOSC1)PE4 |
|
(INT.5/TOSC2)PE5 |
|
RESET |
|
VCC |
|
GND |
|
XTAL2 |
|
XTAL1 |
|
(OC0B/SCL/INT0)PD0 |
|
(OC2B/SDA/INT1)PD1 |
|
(RXD1/INT2)PD2 |
|
(TXD1/INT3)PD3 |
|
(ICP1)PD4 |
|
(XCK1)PD5 |
|
(T1)PD6 |
(T0)PD7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
48 PA3 (AD3)
47 PA4 (AD4)
46 PA5 (AD5)
45 PA6 (AD6)
44 PA7 (AD7)
43 PE2 (ALE/HWB)
42 PC7 (A15/IC.3/CLK0)
41 PC6 (A14/OC.3A)
40 PC5 (A13/OC.3B)
39 PC4 (A12/OC.3C)
38 PC3 (A11/T.3)
37 PC2 (A10)
36 PC1 (A9)
35 PC0 (A8)
34 PE1 (RD)
33 PE0 (WR)
3
7593D–AVR–07/06

Figure 1-2. Pinout AT90USB64/128-QFN
(INT.6/AIN.0) PE6
(INT.7/AIN.1/UVcon) PE7
UVcc
D-
D+
UGnd
UCap
VBus
(IUID) PE3 (SS/PCINT0) PB0 (PCINT1/SCLK) PB1 (PDI/PCINT2/MOSI) PB2 (PDO/PCINT3/MISO) PB3 (PCINT4/OC.2A) PB4 (PCINT5/OC.1A) PB5 (PCINT6/OC.1B) PB6
AVCC |
GND |
AREF |
PF0(ADC0) |
PF1(ADC1) |
PF2(ADC2) |
PF3(ADC3) |
PF4(ADC4/TCK) |
PF5(ADC5/TMS) |
PF6(ADC6/TDO) |
PF7(ADC7/TDI) |
GND |
VCC |
PA0(AD0) |
PA1(AD1) |
PA2(AD2) |
64 |
63 |
62 |
61 |
60 |
59 |
58 |
57 |
56 |
55 |
54 |
53 |
52 |
51 |
50 |
49 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
48 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
47 |
3 |
|
|
INDEX CORNER |
|
|
|
|
|
|
|
46 |
||||
4 |
|
|
|
|
|
|
|
|
|
45 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
44 |
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
43 |
7 |
|
|
AT90USB128 |
|
|
42 |
|||||||||
8 |
|
|
|
|
41 |
||||||||||
9 |
|
(64-lead QFN top view) |
|
|
40 |
||||||||||
10 |
|
|
|
39 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
38 |
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
37 |
13 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
36 |
14 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
35 |
15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
34 |
16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
33 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
31 |
32 |
(PCINT7/OC.0A/OC.1C)PB7 |
(INT4/TOSC1)PE4 |
(INT.5/TOSC2)PE5 |
RESET |
VCC |
GND |
XTAL2 |
XTAL1 |
(OC0B/SCL/INT0)PD0 |
(OC2B/SDA/INT1)PD1 |
(RXD1/INT2)PD2 |
(TXD1/INT3)PD3 |
(ICP1)PD4 |
(XCK1)PD5 |
(T1)PD6 |
(T0)PD7 |
PA3 (AD3)
PA4 (AD4)
PA5 (AD5)
PA6 (AD6)
PA7 (AD7)
PE2 (ALE/HWB) PC7 (A15/IC.3/CLK0) PC6 (A14/OC.3A) PC5 (A13/OC.3B) PC4 (A12/OC.3C) PC3 (A11/T.3)
PC2 (A10)
PC1 (A9)
PC0 (A8)
PE1 (RD)
PE0 (WR)
Note: The large center pad underneath the MLF packages is made of metal and internally connected to GND. It should be soldered or glued to the board to ensure good mechanical stability. If the center pad is left unconnected, the package might loosen from the board.
1.1Disclaimer
Typical values contained in this datasheet are based on simulations and characterization of other AVR microcontrollers manufactured on the same process technology. Min and Max values will be available after the device is characterized.
2. Overview
The AT90USB64/128 is a low-power CMOS 8-bit microcontroller based on the AVR enhanced RISC architecture. By executing powerful instructions in a single clock cycle, the
4 AT90USB64/128 
7593D–AVR–07/06

 AT90USB64/128
AT90USB64/128
AT90USB64/128 achieves throughputs approaching 1 MIPS per MHz allowing the system designer to optimize power consumption versus processing speed.
2.1Block Diagram
Figure 2-1. Block Diagram
|
PF7 - PF0 |
PA7 - PA0 |
PC7 - PC0 |
XTAL1 |
XTAL2 |
RESET |
VCC |
PORTF DRIVERS |
PORTA DRIVERS |
PORTC DRIVERS |
|
|
|
GND |
|
|
|
|
|
|
|
|
|
|
|
DATA REGISTER |
DATA DIR. |
DATA REGISTER |
DATA DIR. |
DATA REGISTER |
DATA DIR. |
|
|||
|
|
PORTF |
REG. PORTF |
PORTA |
REG. PORTA |
PORTC |
REG. PORTC |
|
||
|
|
|
|
|
8-BIT DATA BUS |
|
|
|
|
|
|
|
|
|
POR - BOD |
|
|
|
|
|
|
AVCC |
|
|
|
RESET |
INTERNAL |
|
|
|
|
|
|
|
|
|
CALIB. OSC |
|
|
|
|||
|
|
|
|
|
OSCILLATOR |
|
|
|
||
|
|
|
|
|
|
|
|
|
||
AGND |
|
|
ADC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AREF |
|
|
|
|
WATCHDOG |
OSCILLATOR |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
JTAG TAP |
|
PROGRAM |
STACK |
TIMER |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
COUNTER |
POINTER |
|
|
|
|
|
|
|
|
|
|
|
|
OSCILLATOR |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
ON-CHIP DEBUG |
PROGRAM |
SRAM |
MCU CONTROL |
TIMING AND |
|
|
|
|||
FLASH |
|
REGISTER |
CONTROL |
|
|
|
||||
|
BOUNDARY- |
|
INSTRUCTION |
GENERAL |
TIMER/ |
|
|
|
|
|
|
SCAN |
|
|
|
|
|
||||
|
|
REGISTER |
COUNTERS |
|
|
|
|
|||
|
|
|
PURPOSE |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
REGISTERS |
|
|
|
|
|
|
PROGRAMMING |
|
X |
|
|
|
|
|
|
||
INSTRUCTION |
Y |
INTERRUPT |
|
|
|
|
||||
|
LOGIC |
|
|
|
|
|
||||
|
|
DECODER |
Z |
UNIT |
|
|
|
|
||
|
|
|
|
|
|
|
||||
|
|
|
CONTROL |
ALU |
EEPROM |
|
|
|
|
|
|
|
|
LINES |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PLL |
|
|
|
|
|
|
|
STATUS |
|
|
|
|
|
|
|
|
|
|
REGISTER |
|
|
|
|
|
|
|
|
USART0 |
|
|
SPI |
|
USB |
TWO-WIRE SERIAL |
|
|
|
|
|
|
|
|
INTERFACE |
|
|||
|
|
|
|
|
|
|
|
|
|
|
ANALOG COMPARATOR |
DATA REGISTER |
DATA DIR. |
DATA REGISTER |
DATA DIR. |
DATA REGISTER |
DATA DIR. |
DATA REG. |
DATA DIR. |
||
+ - |
PORTE |
REG. PORTE |
PORTB |
REG. PORTB |
PORTD |
REG. PORTD |
PORTG |
REG. PORTG |
||
|
|
|
|
|
|
|
|
|
||
PORTE DRIVERS |
PORTB DRIVERS |
PORTD DRIVERS |
PORTG DRIVERS |
PE7 - PE0 |
PB7 - PB0 |
PD7 - PD0 |
PG4 - PG0 |
The AVR core combines a rich instruction set with 32 general purpose working registers. All the 32 registers are directly connected to the Arithmetic Logic Unit (ALU), allowing two independent registers to be accessed in one single instruction executed in one clock cycle. The resulting architecture is more code efficient while achieving throughputs up to ten times faster than conventional CISC microcontrollers.
5
7593D–AVR–07/06

The AT90USB64/128 provides the following features: 64/128K bytes of In-System Programmable Flash with Read-While-Write capabilities, 2K/4K bytes EEPROM, 4K/8K bytes SRAM, 48 general purpose I/O lines, 32 general purpose working registers, Real Time Counter (RTC), four flexible Timer/Counters with compare modes and PWM, one USART, a byte oriented 2-wire Serial Interface, a 8-channels, 10-bit ADC with optional differential input stage with programmable gain, programmable Watchdog Timer with Internal Oscillator, an SPI serial port, IEEE std. 1149.1 compliant JTAG test interface, also used for accessing the On-chip Debug system and programming and six software selectable power saving modes. The Idle mode stops the CPU while allowing the SRAM, Timer/Counters, SPI port, and interrupt system to continue functioning. The Power-down mode saves the register contents but freezes the Oscillator, disabling all other chip functions until the next interrupt or Hardware Reset. In Power-save mode, the asynchronous timer continues to run, allowing the user to maintain a timer base while the rest of the device is sleeping. The ADC Noise Reduction mode stops the CPU and all I/O modules except Asynchronous Timer and ADC, to minimize switching noise during ADC conversions. In Standby mode, the Crystal/Resonator Oscillator is running while the rest of the device is sleeping. This allows very fast start-up combined with low power consumption. In Extended Standby mode, both the main Oscillator and the Asynchronous Timer continue to run.
The device is manufactured using Atmel’s high-density nonvolatile memory technology. The Onchip ISP Flash allows the program memory to be reprogrammed in-system through an SPI serial interface, by a conventional nonvolatile memory programmer, or by an On-chip Boot program running on the AVR core. The boot program can use any interface to download the application program in the application Flash memory. Software in the Boot Flash section will continue to run while the Application Flash section is updated, providing true Read-While-Write operation. By combining an 8-bit RISC CPU with In-System Self-Programmable Flash on a monolithic chip, the Atmel AT90USB64/128 is a powerful microcontroller that provides a highly flexible and cost effective solution to many embedded control applications.
The AT90USB64/128 AVR is supported with a full suite of program and system development tools including: C compilers, macro assemblers, program debugger/simulators, in-circuit emulators, and evaluation kits.
2.2Pin Descriptions
2.2.1VCC
Digital supply voltage.
2.2.2GND
Ground.
2.2.3Port A (PA7..PA0)
Port A is an 8-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The Port A output buffers have symmetrical drive characteristics with both high sink and source capability. As inputs, Port A pins that are externally pulled low will source current if the pull-up resistors are activated. The Port A pins are tri-stated when a reset condition becomes active, even if the clock is not running.
Port A also serves the functions of various special features of the AT90USB64/128 as listed on page 81.
6 AT90USB64/128 
7593D–AVR–07/06

AT90USB64/128
2.2.4Port B (PB7..PB0)
Port B is an 8-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The Port B output buffers have symmetrical drive characteristics with both high sink and source capability. As inputs, Port B pins that are externally pulled low will source current if the pull-up resistors are activated. The Port B pins are tri-stated when a reset condition becomes active, even if the clock is not running.
Port B has better driving capabilities than the other ports.
Port B also serves the functions of various special features of the AT90USB64/128 as listed on page 82.
2.2.5Port C (PC7..PC0)
Port C is an 8-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The Port C output buffers have symmetrical drive characteristics with both high sink and source capability. As inputs, Port C pins that are externally pulled low will source current if the pull-up resistors are activated. The Port C pins are tri-stated when a reset condition becomes active, even if the clock is not running.
Port C also serves the functions of special features of the AT90USB64/128 as listed on page 85.
2.2.6Port D (PD7..PD0)
Port D is an 8-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The Port D output buffers have symmetrical drive characteristics with both high sink and source capability. As inputs, Port D pins that are externally pulled low will source current if the pull-up resistors are activated. The Port D pins are tri-stated when a reset condition becomes active, even if the clock is not running.
Port D also serves the functions of various special features of the AT90USB64/128 as listed on page 86.
2.2.7Port E (PE7..PE0)
Port E is an 8-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The Port E output buffers have symmetrical drive characteristics with both high sink and source capability. As inputs, Port E pins that are externally pulled low will source current if the pull-up resistors are activated. The Port E pins are tri-stated when a reset condition becomes active, even if the clock is not running.
Port E also serves the functions of various special features of the AT90USB64/128 as listed on page 89.
2.2.8Port F (PF7..PF0)
Port F serves as analog inputs to the A/D Converter.
Port F also serves as an 8-bit bi-directional I/O port, if the A/D Converter is not used. Port pins can provide internal pull-up resistors (selected for each bit). The Port F output buffers have symmetrical drive characteristics with both high sink and source capability. As inputs, Port F pins that are externally pulled low will source current if the pull-up resistors are activated. The Port F pins are tri-stated when a reset condition becomes active, even if the clock is not running. If the JTAG interface is enabled, the pull-up resistors on pins PF7(TDI), PF5(TMS), and PF4(TCK) will be activated even if a reset occurs.
Port F also serves the functions of the JTAG interface.
7
7593D–AVR–07/06
2.2.9D-
USB Full speed / Low Speed Negative Data Upstream Port. Should be connected to the USB D- connector pin with a serial 22 Ohms resistor.
2.2.10D+
USB Full speed / Low Speed Positive Data Upstream Port. Should be connected to the USB D+ connector pin with a serial 22 Ohms resistor.
2.2.11UGND
USB Pads Ground.
2.2.12UVCC
USB Pads Internal Regulator Input supply voltage.
2.2.13UCAP
USB Pads Internal Regulator Output supply voltage. Should be connected to an external capacitor (1µF).
2.2.14VBUS
USB VBUS monitor and OTG negociations.
2.2.15RESET
Reset input. A low level on this pin for longer than the minimum pulse length will generate a reset, even if the clock is not running. The minimum pulse length is given in Table 8-1 on page 60. Shorter pulses are not guaranteed to generate a reset.
2.2.16XTAL1
Input to the inverting Oscillator amplifier and input to the internal clock operating circuit.
2.2.17XTAL2
Output from the inverting Oscillator amplifier.
2.2.18AVCC
AVCC is the supply voltage pin for Port F and the A/D Converter. It should be externally connected to VCC, even if the ADC is not used. If the ADC is used, it should be connected to VCC through a low-pass filter.
2.2.19AREF
This is the analog reference pin for the A/D Converter.
3. About Code Examples
This documentation contains simple code examples that briefly show how to use various parts of the device. Be aware that not all C compiler vendors include bit definitions in the header files and interrupt handling in C is compiler dependent. Please confirm with the C compiler documentation for more details.
These code examples assume that the part specific header file is included before compilation.
For I/O registers located in extended I/O map, "IN", "OUT", "SBIS", "SBIC", "CBI", and "SBI"
8 AT90USB64/128 
7593D–AVR–07/06

 AT90USB64/128
AT90USB64/128
instructions must be replaced with instructions that allow access to extended I/O. Typically "LDS" and "STS" combined with "SBRS", "SBRC", "SBR", and "CBR".
9
7593D–AVR–07/06

4. AVR CPU Core
4.1Introduction
This section discusses the AVR core architecture in general. The main function of the CPU core is to ensure correct program execution. The CPU must therefore be able to access memories, perform calculations, control peripherals, and handle interrupts.
4.2Architectural Overview
Figure 4-1. Block Diagram of the AVR Architecture
|
|
|
Data Bus 8-bit |
|
Flash |
Program |
|
Status |
|
Counter |
|
and Control |
|
|
Program |
|
|
||
|
|
|
|
|
Memory |
|
|
|
|
|
|
|
32 x 8 |
Interrupt |
Instruction |
|
|
Unit |
|
|
|
General |
|
|
Register |
|
|
Purpose |
SPI |
|
|
|
Registrers |
|
|
|
|
Unit |
|
|
|
|
|
|
Instruction |
|
|
|
Watchdog |
Decoder |
AddressingDirect |
AddressingIndirect |
|
Timer |
|
ALU |
Analog |
||
|
|
|
||
|
|
|
|
|
Control Lines |
|
|
|
Comparator |
|
|
|
|
I/O Module1 |
|
|
|
Data |
I/O Module 2 |
|
|
|
SRAM |
|
|
|
|
|
|
|
|
|
|
I/O Module n |
|
|
|
EEPROM |
|
|
|
|
I/O Lines |
|
In order to maximize performance and parallelism, the AVR uses a Harvard architecture – with separate memories and buses for program and data. Instructions in the program memory are executed with a single level pipelining. While one instruction is being executed, the next instruction is pre-fetched from the program memory. This concept enables instructions to be executed in every clock cycle. The program memory is In-System Reprogrammable Flash memory.
10 AT90USB64/128
7593D–AVR–07/06
 AT90USB64/128
AT90USB64/128
The fast-access Register File contains 32 x 8-bit general purpose working registers with a single clock cycle access time. This allows single-cycle Arithmetic Logic Unit (ALU) operation. In a typical ALU operation, two operands are output from the Register File, the operation is executed, and the result is stored back in the Register File – in one clock cycle.
Six of the 32 registers can be used as three 16-bit indirect address register pointers for Data Space addressing – enabling efficient address calculations. One of the these address pointers can also be used as an address pointer for look up tables in Flash program memory. These added function registers are the 16-bit X-, Y-, and Z-register, described later in this section.
The ALU supports arithmetic and logic operations between registers or between a constant and a register. Single register operations can also be executed in the ALU. After an arithmetic operation, the Status Register is updated to reflect information about the result of the operation.
Program flow is provided by conditional and unconditional jump and call instructions, able to directly address the whole address space. Most AVR instructions have a single 16-bit word format. Every program memory address contains a 16or 32-bit instruction.
Program Flash memory space is divided in two sections, the Boot Program section and the Application Program section. Both sections have dedicated Lock bits for write and read/write protection. The SPM instruction that writes into the Application Flash memory section must reside in the Boot Program section.
During interrupts and subroutine calls, the return address Program Counter (PC) is stored on the Stack. The Stack is effectively allocated in the general data SRAM, and consequently the Stack size is only limited by the total SRAM size and the usage of the SRAM. All user programs must initialize the SP in the Reset routine (before subroutines or interrupts are executed). The Stack Pointer (SP) is read/write accessible in the I/O space. The data SRAM can easily be accessed through the five different addressing modes supported in the AVR architecture.
The memory spaces in the AVR architecture are all linear and regular memory maps.
A flexible interrupt module has its control registers in the I/O space with an additional Global Interrupt Enable bit in the Status Register. All interrupts have a separate Interrupt Vector in the Interrupt Vector table. The interrupts have priority in accordance with their Interrupt Vector position. The lower the Interrupt Vector address, the higher the priority.
The I/O memory space contains 64 addresses for CPU peripheral functions as Control Registers, SPI, and other I/O functions. The I/O Memory can be accessed directly, or as the Data Space locations following those of the Register File, 0x20 - 0x5F. In addition, the AT90USB64/128 has Extended I/O space from 0x60 - 0x0FF in SRAM where only the ST/STS/STD and LD/LDS/LDD instructions can be used.
4.3ALU – Arithmetic Logic Unit
The high-performance AVR ALU operates in direct connection with all the 32 general purpose working registers. Within a single clock cycle, arithmetic operations between general purpose registers or between a register and an immediate are executed. The ALU operations are divided into three main categories – arithmetic, logical, and bit-functions. Some implementations of the architecture also provide a powerful multiplier supporting both signed/unsigned multiplication and fractional format. See the “Instruction Set” section for a detailed description.
11
7593D–AVR–07/06

4.4Status Register
The Status Register contains information about the result of the most recently executed arithmetic instruction. This information can be used for altering program flow in order to perform conditional operations. Note that the Status Register is updated after all ALU operations, as specified in the Instruction Set Reference. This will in many cases remove the need for using the dedicated compare instructions, resulting in faster and more compact code.
The Status Register is not automatically stored when entering an interrupt routine and restored when returning from an interrupt. This must be handled by software.
The AVR Status Register – SREG – is defined as:
Bit |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|
|
I |
T |
H |
S |
V |
N |
Z |
C |
SREG |
Read/Write |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
|
Initial Value |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
• Bit 7 – I: Global Interrupt Enable
The Global Interrupt Enable bit must be set for the interrupts to be enabled. The individual interrupt enable control is then performed in separate control registers. If the Global Interrupt Enable Register is cleared, none of the interrupts are enabled independent of the individual interrupt enable settings. The I-bit is cleared by hardware after an interrupt has occurred, and is set by the RETI instruction to enable subsequent interrupts. The I-bit can also be set and cleared by the application with the SEI and CLI instructions, as described in the instruction set reference.
• Bit 6 – T: Bit Copy Storage
The Bit Copy instructions BLD (Bit LoaD) and BST (Bit STore) use the T-bit as source or destination for the operated bit. A bit from a register in the Register File can be copied into T by the BST instruction, and a bit in T can be copied into a bit in a register in the Register File by the BLD instruction.
• Bit 5 – H: Half Carry Flag
The Half Carry Flag H indicates a Half Carry in some arithmetic operations. Half Carry Is useful in BCD arithmetic. See the “Instruction Set Description” for detailed information.
• Bit 4 – S: Sign Bit, S = N V
The S-bit is always an exclusive or between the Negative Flag N and the Two’s Complement Overflow Flag V. See the “Instruction Set Description” for detailed information.
• Bit 3 – V: Two’s Complement Overflow Flag
The Two’s Complement Overflow Flag V supports two’s complement arithmetics. See the “Instruction Set Description” for detailed information.
• Bit 2 – N: Negative Flag
The Negative Flag N indicates a negative result in an arithmetic or logic operation. See the “Instruction Set Description” for detailed information.
• Bit 1 – Z: Zero Flag
The Zero Flag Z indicates a zero result in an arithmetic or logic operation. See the “Instruction Set Description” for detailed information.
12 AT90USB64/128 
7593D–AVR–07/06

AT90USB64/128
• Bit 0 – C: Carry Flag
The Carry Flag C indicates a carry in an arithmetic or logic operation. See the “Instruction Set Description” for detailed information.
4.5General Purpose Register File
The Register File is optimized for the AVR Enhanced RISC instruction set. In order to achieve the required performance and flexibility, the following input/output schemes are supported by the Register File:
•One 8-bit output operand and one 8-bit result input
•Two 8-bit output operands and one 8-bit result input
•Two 8-bit output operands and one 16-bit result input
•One 16-bit output operand and one 16-bit result input
Figure 4-2 shows the structure of the 32 general purpose working registers in the CPU.
Figure 4-2. AVR CPU General Purpose Working Registers
|
|
7 |
0 |
Addr. |
|
|
|
|
|
0x00 |
|
|
|
R0 |
|
|
|
|
|
|
|
|
|
|
|
R1 |
|
0x01 |
|
|
|
|
|
|
|
|
|
R2 |
|
0x02 |
|
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
R13 |
|
0x0D |
|
|
|
|
|
|
|
General |
R14 |
|
0x0E |
|
|
|
|
|
|
|
|
Purpose |
R15 |
|
0x0F |
|
|
Working |
|
|
0x10 |
|
|
R16 |
|
|
|||
|
|
|
|
|
|
Registers |
R17 |
|
0x11 |
|
|
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
R26 |
|
0x1A |
X-register Low Byte |
|
|
|
|
|
|
|
|
R27 |
|
0x1B |
X-register High Byte |
|
|
|
|
|
|
|
|
R28 |
|
0x1C |
Y-register Low Byte |
|
|
|
|
|
|
|
|
R29 |
|
0x1D |
Y-register High Byte |
|
|
|
|
|
|
|
|
R30 |
|
0x1E |
Z-register Low Byte |
|
|
|
|
|
|
|
|
R31 |
|
0x1F |
Z-register High Byte |
Most of the instructions operating on the Register File have direct access to all registers, and most of them are single cycle instructions.
As shown in Figure 4-2, each register is also assigned a data memory address, mapping them directly into the first 32 locations of the user Data Space. Although not being physically implemented as SRAM locations, this memory organization provides great flexibility in access of the registers, as the X-, Y- and Z-pointer registers can be set to index any register in the file.
4.5.1The X-register, Y-register, and Z-register
The registers R26..R31 have some added functions to their general purpose usage. These registers are 16-bit address pointers for indirect addressing of the data space. The three indirect address registers X, Y, and Z are defined as described in Figure 4-3.
13
7593D–AVR–07/06

Figure 4-3. The X-, Y-, and Z-registers
|
|
15 |
XH |
|
XL |
0 |
X-register |
7 |
|
0 |
7 |
0 |
|
|
|
R27 (0x1B) |
|
|
R26 (0x1A) |
|
|
|
15 |
YH |
|
YL |
0 |
Y-register |
7 |
|
0 |
7 |
0 |
|
|
|
R29 (0x1D) |
|
|
R28 (0x1C) |
|
|
|
15 |
ZH |
|
ZL |
0 |
Z-register |
|
|
|
|
|
|
7 |
0 |
|
7 |
0 |
||
|
|
R31 (0x1F) |
|
|
R30 (0x1E) |
|
In the different addressing modes these address registers have functions as fixed displacement, automatic increment, and automatic decrement (see the instruction set reference for details).
4.6Stack Pointer
The Stack is mainly used for storing temporary data, for storing local variables and for storing return addresses after interrupts and subroutine calls. The Stack Pointer Register always points to the top of the Stack. Note that the Stack is implemented as growing from higher memory locations to lower memory locations. This implies that a Stack PUSH command decreases the Stack Pointer.
The Stack Pointer points to the data SRAM Stack area where the Subroutine and Interrupt Stacks are located. This Stack space in the data SRAM must be defined by the program before any subroutine calls are executed or interrupts are enabled. The Stack Pointer must be set to point above 0x0100. The initial value of the stack pointer is the last address of the internal SRAM. The Stack Pointer is decremented by one when data is pushed onto the Stack with the PUSH instruction, and it is decremented by three when the return address is pushed onto the Stack with subroutine call or interrupt. The Stack Pointer is incremented by one when data is popped from the Stack with the POP instruction, and it is incremented by three when data is popped from the Stack with return from subroutine RET or return from interrupt RETI.
The AVR Stack Pointer is implemented as two 8-bit registers in the I/O space. The number of bits actually used is implementation dependent. Note that the data space in some implementations of the AVR architecture is so small that only SPL is needed. In this case, the SPH Register will not be present.
Bit |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
|
|
SP15 |
SP14 |
SP13 |
SP12 |
SP11 |
SP10 |
SP9 |
SP8 |
SPH |
|
SP7 |
SP6 |
SP5 |
SP4 |
SP3 |
SP2 |
SP1 |
SP0 |
SPL |
|
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|
Read/Write |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
|
|
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
|
Initial Value |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
|
|
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
|
14 AT90USB64/128 
7593D–AVR–07/06
AT90USB64/128
4.6.1Extended Z-pointer Register for ELPM/SPM - RAMPZ
Bit |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|
|
RAMPZ |
RAMPZ |
RAMPZ |
RAMPZ |
RAMPZ |
RAMPZ |
RAMPZ1 |
RAMPZ0 |
RAMPZ |
|
7 |
6 |
5 |
4 |
3 |
2 |
|
|
|
Read/Write |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
|
Initial Value |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
For ELPM/SPM instructions, the Z-pointer is a concatenation of RAMPZ, ZH, and ZL, as shown in Figure 4-4. Note that LPM is not affected by the RAMPZ setting.
Figure 4-4. The Z-pointer used by ELPM and SPM
Bit ( |
7 |
0 |
7 |
0 |
7 |
0 |
Individually) |
|
|
|
|
|
|
|
RAMPZ |
|
ZH |
|
ZL |
|
Bit (Z-pointer) |
23 |
16 |
15 |
8 |
7 |
0 |
The actual number of bits is implementation dependent. Unused bits in an implementation will always read as zero. For compatibility with future devices, be sure to write these bits to zero.
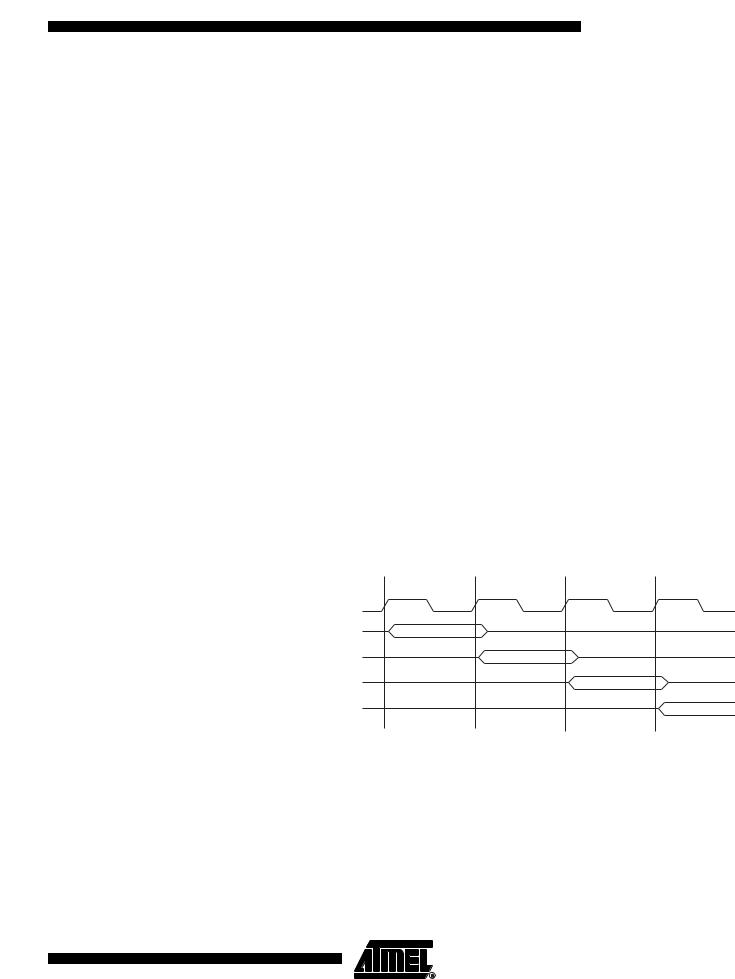
4.7Instruction Execution Timing
This section describes the general access timing concepts for instruction execution. The AVR CPU is driven by the CPU clock clkCPU, directly generated from the selected clock source for the chip. No internal clock division is used.
Figure 4-5 shows the parallel instruction fetches and instruction executions enabled by the Harvard architecture and the fast-access Register File concept. This is the basic pipelining concept to obtain up to 1 MIPS per MHz with the corresponding unique results for functions per cost, functions per clocks, and functions per power-unit.
Figure 4-5. The Parallel Instruction Fetches and Instruction Executions
T1 |
T2 |
T3 |
T4 |
clkCPU
1st Instruction Fetch
1st Instruction Execute 2nd Instruction Fetch 2nd Instruction Execute 3rd Instruction Fetch 3rd Instruction Execute 4th Instruction Fetch
Figure 4-6 shows the internal timing concept for the Register File. In a single clock cycle an ALU operation using two register operands is executed, and the result is stored back to the destination register.
15
7593D–AVR–07/06

Figure 4-6. Single Cycle ALU Operation
T1 |
T2 |
T3 |
T4 |
clkCPU Total Execution Time
Register Operands Fetch
ALU Operation Execute
Result Write Back
4.8Reset and Interrupt Handling
The AVR provides several different interrupt sources. These interrupts and the separate Reset Vector each have a separate program vector in the program memory space. All interrupts are assigned individual enable bits which must be written logic one together with the Global Interrupt Enable bit in the Status Register in order to enable the interrupt. Depending on the Program Counter value, interrupts may be automatically disabled when Boot Lock bits BLB02 or BLB12 are programmed. This feature improves software security. See the section “Memory Programming” on page 368 for details.
The lowest addresses in the program memory space are by default defined as the Reset and Interrupt Vectors. The complete list of vectors is shown in “Interrupts” on page 70. The list also determines the priority levels of the different interrupts. The lower the address the higher is the priority level. RESET has the highest priority, and next is INT0 – the External Interrupt Request 0. The Interrupt Vectors can be moved to the start of the Boot Flash section by setting the IVSEL bit in the MCU Control Register (MCUCR). Refer to “Interrupts” on page 70 for more information. The Reset Vector can also be moved to the start of the Boot Flash section by programming the BOOTRST Fuse, see “Memory Programming” on page 368.
When an interrupt occurs, the Global Interrupt Enable I-bit is cleared and all interrupts are disabled. The user software can write logic one to the I-bit to enable nested interrupts. All enabled interrupts can then interrupt the current interrupt routine. The I-bit is automatically set when a Return from Interrupt instruction – RETI – is executed.
There are basically two types of interrupts. The first type is triggered by an event that sets the Interrupt Flag. For these interrupts, the Program Counter is vectored to the actual Interrupt Vector in order to execute the interrupt handling routine, and hardware clears the corresponding Interrupt Flag. Interrupt Flags can also be cleared by writing a logic one to the flag bit position(s) to be cleared. If an interrupt condition occurs while the corresponding interrupt enable bit is cleared, the Interrupt Flag will be set and remembered until the interrupt is enabled, or the flag is cleared by software. Similarly, if one or more interrupt conditions occur while the Global Interrupt Enable bit is cleared, the corresponding Interrupt Flag(s) will be set and remembered until the Global Interrupt Enable bit is set, and will then be executed by order of priority.
The second type of interrupts will trigger as long as the interrupt condition is present. These interrupts do not necessarily have Interrupt Flags. If the interrupt condition disappears before the interrupt is enabled, the interrupt will not be triggered.
When the AVR exits from an interrupt, it will always return to the main program and execute one more instruction before any pending interrupt is served.
16 AT90USB64/128 
7593D–AVR–07/06
 AT90USB64/128
AT90USB64/128
Note that the Status Register is not automatically stored when entering an interrupt routine, nor restored when returning from an interrupt routine. This must be handled by software.
When using the CLI instruction to disable interrupts, the interrupts will be immediately disabled. No interrupt will be executed after the CLI instruction, even if it occurs simultaneously with the CLI instruction. The following example shows how this can be used to avoid interrupts during the timed EEPROM write sequence..
Assembly Code Example
in r16, SREG ; store SREG value
cli ; disable interrupts during timed sequence sbi EECR, EEMPE ; start EEPROM write
sbi EECR, EEPE
out SREG, r16 ; restore SREG value (I-bit)
C Code Example
char cSREG;
cSREG = SREG; /* store SREG value */
/* disable interrupts during timed sequence */
__disable_interrupt();
EECR |= (1<<EEMPE); /* start EEPROM write */
EECR |= (1<<EEPE);
SREG = cSREG; /* restore SREG value (I-bit) */
When using the SEI instruction to enable interrupts, the instruction following SEI will be executed before any pending interrupts, as shown in this example.
17
7593D–AVR–07/06

Assembly Code Example
sei ; set Global Interrupt Enable
sleep; enter sleep, waiting for interrupt
;note: will enter sleep before any pending
;interrupt(s)
C Code Example
__enable_interrupt(); /* set Global Interrupt Enable */
__sleep(); /* enter sleep, waiting for interrupt */
/* note: will enter sleep before any pending interrupt(s) */
4.8.1Interrupt Response Time
The interrupt execution response for all the enabled AVR interrupts is five clock cycles minimum. After five clock cycles the program vector address for the actual interrupt handling routine is executed. During these five clock cycle period, the Program Counter is pushed onto the Stack. The vector is normally a jump to the interrupt routine, and this jump takes three clock cycles. If an interrupt occurs during execution of a multi-cycle instruction, this instruction is completed before the interrupt is served. If an interrupt occurs when the MCU is in sleep mode, the interrupt execution response time is increased by five clock cycles. This increase comes in addition to the start-up time from the selected sleep mode.
A return from an interrupt handling routine takes five clock cycles. During these five clock cycles, the Program Counter (three bytes) is popped back from the Stack, the Stack Pointer is incremented by three, and the I-bit in SREG is set.
18 AT90USB64/128 
7593D–AVR–07/06
AT90USB64/128
5. AVR AT90USB64/128 Memories
This section describes the different memories in the AT90USB64/128. The AVR architecture has two main memory spaces, the Data Memory and the Program Memory space. In addition, the AT90USB64/128 features an EEPROM Memory for data storage. All three memory spaces are linear and regular.
Table 5-1. |
Memory Mapping. |
|
|
||
Memory |
|
Mnemonic |
AT90USB64 |
AT90USB128 |
|
|
|
|
|
|
|
|
Size |
Flash size |
64 K bytes |
128K bytes |
|
|
|
|
|
|
|
Flash |
Start Address |
- |
0x00000 |
|
|
|
|
|
|
||
End Address |
Flash end |
0x0FFFF(1) |
0x1FFFF(1) |
||
|
|||||
|
0x7FFF(2) |
0xFFFF(2) |
|||
|
|
|
|||
32 |
Size |
- |
32 bytes |
|
|
|
|
|
|
||
Start Address |
- |
0x0000 |
|
||
Registers |
|
||||
|
|
|
|
||
End Address |
- |
0x001F |
|
||
|
|
||||
|
|
|
|
|
|
I/O |
Size |
- |
64 bytes |
|
|
|
|
|
|
||
Start Address |
- |
0x0020 |
|
||
Registers |
|
||||
|
|
|
|
||
End Address |
- |
0x005F |
|
||
|
|
||||
|
|
|
|
|
|
Ext I/O |
Size |
- |
160 bytes |
|
|
|
|
|
|
||
Start Address |
- |
0x0060 |
|
||
Registers |
|
||||
|
|
|
|
||
End Address |
- |
0x00FF |
|
||
|
|
||||
|
|
|
|
|
|
Internal |
Size |
ISRAM size |
4 K bytes |
8 K bytes |
|
|
|
|
|
||
Start Address |
ISRAM start |
0x0100 |
|
||
SRAM |
|
||||
|
|
|
|
||
|
End Address |
ISRAM end |
0x10FF |
0x20FF |
|
|
|
|
|
|
|
External |
Size |
XMem size |
0-64 K bytes |
|
|
|
|
|
|
||
Start Address |
XMem start |
0x1100 |
0x2100 |
||
Memory |
|||||
|
|
|
|
||
End Address |
XMem end |
0xFFFF |
|
||
|
|
||||
|
|
|
|
|
|
|
Size |
E2 size |
2 K bytes |
4K bytes |
|
EEPROM |
|
|
|
|
|
Start Address |
- |
0x0000 |
|
||
|
|
|
|
|
|
|
End Address |
E2 end |
0x07FF |
0x0FFF |
|
|
|
|
|
|
|
Notes: 1. Byte address.
2.Word (16-bit) address.
5.1In-System Reprogrammable Flash Program Memory
The AT90USB64/128 contains 128K bytes On-chip In-System Reprogrammable Flash memory for program storage. Since all AVR instructions are 16 or 32 bits wide, the Flash is organized as 64K x 16. For software security, the Flash Program memory space is divided into two sections, Boot Program section and Application Program section.
The Flash memory has an endurance of at least 100,000 write/erase cycles. The
AT90USB64/128 Program Counter (PC) is 16 bits wide, thus addressing the 128K program
19
7593D–AVR–07/06

memory locations. The operation of Boot Program section and associated Boot Lock bits for software protection are described in detail in “Memory Programming” on page 368. “Memory Programming” on page 368 contains a detailed description on Flash data serial downloading using the SPI pins or the JTAG interface.
Constant tables can be allocated within the entire program memory address space (see the LPM
– Load Program Memory instruction description and ELPM - Extended Load Program Memory instruction description).
Timing diagrams for instruction fetch and execution are presented in “Instruction Execution Timing” on page 15.
Figure 5-1. Program Memory Map
Program Memory
0x00000
Application Flash Section
Boot Flash Section
Flash End
5.2SRAM Data Memory
Figure 5-2 shows how the AT90USB64/128 SRAM Memory is organized.
The AT90USB64/128 is a complex microcontroller with more peripheral units than can be supported within the 64 location reserved in the Opcode for the IN and OUT instructions. For the Extended I/O space from $060 - $1FF in SRAM, only the ST/STS/STD and LD/LDS/LDD instructions can be used.
The first 4,608/8,704 Data Memory locations address both the Register File, the I/O Memory, Extended I/O Memory, and the internal data SRAM. The first 32 locations address the Register file, the next 64 location the standard I/O Memory, then 416 locations of Extended I/O memory and the next 8,192 locations address the internal data SRAM.
20 AT90USB64/128
7593D–AVR–07/06
 AT90USB64/128
AT90USB64/128
An optional external data SRAM can be used with the AT90USB64/128. This SRAM will occupy an area in the remaining address locations in the 64K address space. This area starts at the address following the internal SRAM. The Register file, I/O, Extended I/O and Internal SRAM occupies the lowest 4,608/8,704 bytes, so when using 64KB (65,536 bytes) of External Memory, 60,478/56,832 Bytes of External Memory are available. See “External Memory Interface” on page 30 for details on how to take advantage of the external memory map.
When the addresses accessing the SRAM memory space exceeds the internal data memory locations, the external data SRAM is accessed using the same instructions as for the internal data memory access. When the internal data memories are accessed, the read and write strobe pins (PE0 and PE1) are inactive during the whole access cycle. External SRAM operation is enabled by setting the SRE bit in the XMCRA Register.
Accessing external SRAM takes one additional clock cycle per byte compared to access of the internal SRAM. This means that the commands LD, ST, LDS, STS, LDD, STD, PUSH, and POP take one additional clock cycle. If the Stack is placed in external SRAM, interrupts, subroutine calls and returns take three clock cycles extra because the three-byte program counter is pushed and popped, and external memory access does not take advantage of the internal pipeline memory access. When external SRAM interface is used with wait-state, one-byte external access takes two, three, or four additional clock cycles for one, two, and three wait-states respectively. Interrupts, subroutine calls and returns will need five, seven, or nine clock cycles more than specified in the instruction set manual for one, two, and three wait-states.
The five different addressing modes for the data memory cover: Direct, Indirect with Displacement, Indirect, Indirect with Pre-decrement, and Indirect with Post-increment. In the Register file, registers R26 to R31 feature the indirect addressing pointer registers.
The direct addressing reaches the entire data space.
The Indirect with Displacement mode reaches 63 address locations from the base address given by the Y- or Z-register.
When using register indirect addressing modes with automatic pre-decrement and post-incre- ment, the address registers X, Y, and Z are decremented or incremented.
The 32 general purpose working registers, 64 I/O registers, and the 8,192 bytes of internal data SRAM in the AT90USB64/128 are all accessible through all these addressing modes. The Register File is described in “General Purpose Register File” on page 13.
21
7593D–AVR–07/06

Figure 5-2. Data Memory Map
Data Memory
32 Registers
64 I/O Registers
160 E xt I/O Reg.
Internal S RAM
(8192 x 8)
External S RAM
(0 - 64K x 8)
$0000 - $001F $0020 - $005F $0060 - $00FF ISRAM start
ISRAM end
XMem start
$FFFF
5.2.1Data Memory Access Times
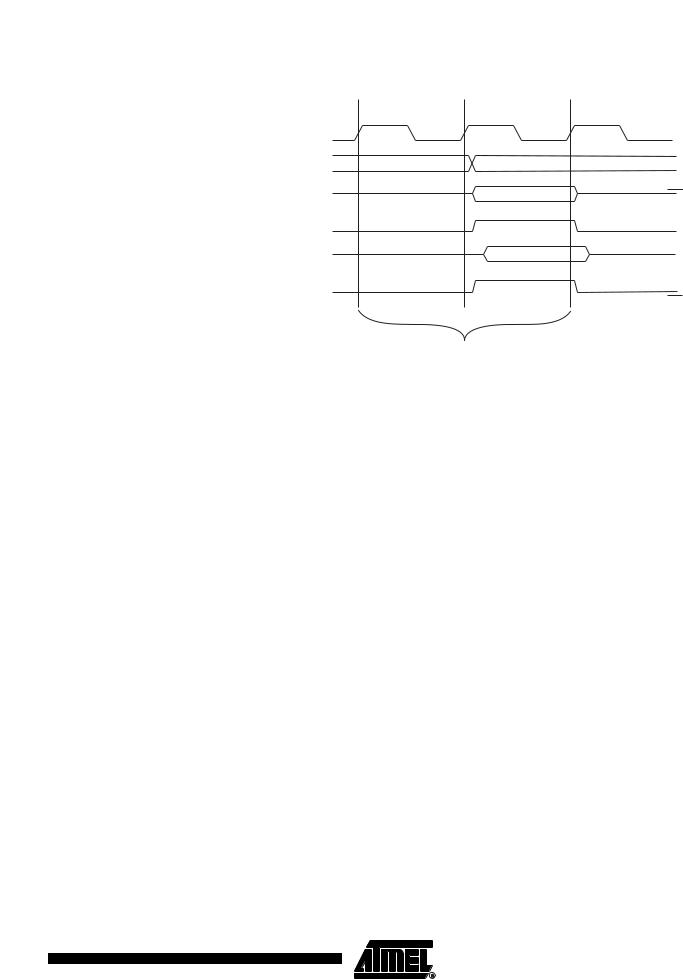
This section describes the general access timing concepts for internal memory access. The internal data SRAM access is performed in two clkCPU cycles as described in Figure 5-3.
22 AT90USB64/128 
7593D–AVR–07/06
 AT90USB64/128
AT90USB64/128
Figure 5-3. On-chip Data SRAM Access Cycles
T1 T2 T3
clkCPU
Address Compute Address Address valid
Data
WR
Data
RD
 Read Write
Read Write
Memory Access Instruction |
Next Instruction |
5.3EEPROM Data Memory
The AT90USB64/128 contains 2K/4K bytes of data EEPROM memory. It is organized as a separate data space, in which single bytes can be read and written. The EEPROM has an endurance of at least 100,000 write/erase cycles. The access between the EEPROM and the CPU is described in the following, specifying the EEPROM Address Registers, the EEPROM Data Register, and the EEPROM Control Register.
For a detailed description of SPI, JTAG and Parallel data downloading to the EEPROM, see page 382, page 387, and page 371 respectively.
5.3.1EEPROM Read/Write Access
The EEPROM Access Registers are accessible in the I/O space.
The write access time for the EEPROM is given in Table 5-3. A self-timing function, however, lets the user software detect when the next byte can be written. If the user code contains instructions that write the EEPROM, some precautions must be taken. In heavily filtered power supplies, VCC is likely to rise or fall slowly on power-up/down. This causes the device for some period of time to run at a voltage lower than specified as minimum for the clock frequency used. See “Preventing EEPROM Corruption” on page 28. for details on how to avoid problems in these situations.
In order to prevent unintentional EEPROM writes, a specific write procedure must be followed. Refer to the description of the EEPROM Control Register for details on this.
When the EEPROM is read, the CPU is halted for four clock cycles before the next instruction is executed. When the EEPROM is written, the CPU is halted for two clock cycles before the next instruction is executed.
5.3.2The EEPROM Address Register – EEARH and EEARL
Bit |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
|
|
– |
– |
– |
– |
EEAR11 |
EEAR10 |
EEAR9 |
EEAR8 |
EEARH |
|
EEAR7 |
EEAR6 |
EEAR5 |
EEAR4 |
EEAR3 |
EEAR2 |
EEAR1 |
EEAR0 |
EEARL |
23
7593D–AVR–07/06

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
6 |
5 |
4 |
|
3 |
2 |
1 |
0 |
|
Read/Write |
R |
R |
R |
R |
R/W |
R/W |
R/W |
R/W |
||
|
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
||
Initial Value |
0 |
0 |
0 |
0 |
|
X |
X |
X |
X |
|
|
X |
X |
X |
X |
X |
X |
X |
X |
||
• Bits 15..12 – Res: Reserved Bits
These bits are reserved bits in the AT90USB64/128 and will always read as zero.
• Bits 11..0 – EEAR8..0: EEPROM Address
The EEPROM Address Registers – EEARH and EEARL specify the EEPROM address in the 4K bytes EEPROM space. The EEPROM data bytes are addressed linearly between 0 and 4096. The initial value of EEAR is undefined. A proper value must be written before the EEPROM may be accessed.
5.3.3The EEPROM Data Register – EEDR
Bit |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|
|
MSB |
|
|
|
|
|
|
LSB |
EEDR |
Read/Write |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
|
Initial Value |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
• Bits 7..0 – EEDR7.0: EEPROM Data
For the EEPROM write operation, the EEDR Register contains the data to be written to the EEPROM in the address given by the EEAR Register. For the EEPROM read operation, the EEDR contains the data read out from the EEPROM at the address given by EEAR.
5.3.4The EEPROM Control Register – EECR
Bit |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|
|
– |
– |
EEPM1 |
EEPM0 |
EERIE |
EEMPE |
EEPE |
EERE |
EECR |
Read/Write |
R |
R |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
|
Initial Value |
0 |
0 |
X |
X |
0 |
0 |
X |
0 |
|
• Bits 7..6 – Res: Reserved Bits
These bits are reserved bits in the AT90USB64/128 and will always read as zero.
• Bits 5, 4 – EEPM1 and EEPM0: EEPROM Programming Mode Bits
The EEPROM Programming mode bit setting defines which programming action that will be triggered when writing EEPE. It is possible to program data in one atomic operation (erase the old value and program the new value) or to split the Erase and Write operations in two different operations. The Programming times for the different modes are shown in Table 5-2. While EEPE is set, any write to EEPMn will be ignored. During reset, the EEPMn bits will be reset to 0b00 unless the EEPROM is busy programming.
24 AT90USB64/128 
7593D–AVR–07/06

 AT90USB64/128
AT90USB64/128
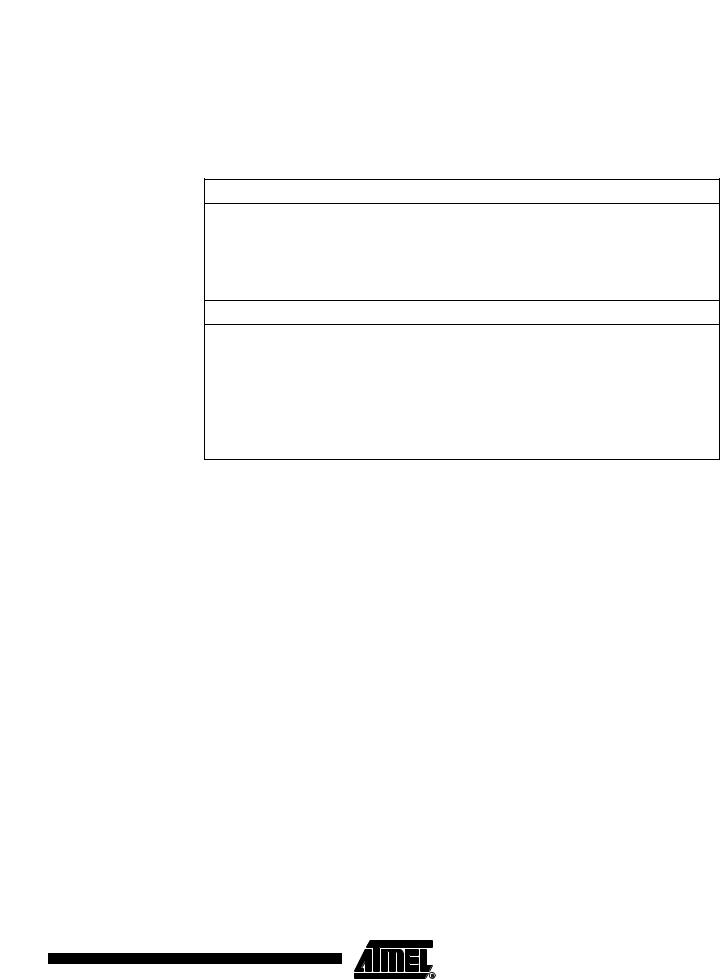
Table 5-2. |
EEPROM Mode Bits |
|
||
|
|
|
Programming |
|
EEPM1 |
|
EEPM0 |
Time |
Operation |
0 |
|
0 |
3.4 ms |
Erase and Write in one operation (Atomic Operation) |
|
|
|
|
|
0 |
|
1 |
1.8 ms |
Erase Only |
|
|
|
|
|
1 |
|
0 |
1.8 ms |
Write Only |
|
|
|
|
|
1 |
|
1 |
– |
Reserved for future use |
|
|
|
|
|
• Bit 3 – EERIE: EEPROM Ready Interrupt Enable
Writing EERIE to one enables the EEPROM Ready Interrupt if the I bit in SREG is set. Writing EERIE to zero disables the interrupt. The EEPROM Ready interrupt generates a constant interrupt when EEPE is cleared.
• Bit 2 – EEMPE: EEPROM Master Programming Enable
The EEMPE bit determines whether setting EEPE to one causes the EEPROM to be written. When EEMPE is set, setting EEPE within four clock cycles will write data to the EEPROM at the selected address If EEMPE is zero, setting EEPE will have no effect. When EEMPE has been written to one by software, hardware clears the bit to zero after four clock cycles. See the description of the EEPE bit for an EEPROM write procedure.
• Bit 1 – EEPE: EEPROM Programming Enable
The EEPROM Write Enable Signal EEPE is the write strobe to the EEPROM. When address and data are correctly set up, the EEPE bit must be written to one to write the value into the EEPROM. The EEMPE bit must be written to one before a logical one is written to EEPE, otherwise no EEPROM write takes place. The following procedure should be followed when writing the EEPROM (the order of steps 3 and 4 is not essential):
1.Wait until EEPE becomes zero.
2.Wait until SELFPRGEN in SPMCSR becomes zero.
3.Write new EEPROM address to EEAR (optional).
4.Write new EEPROM data to EEDR (optional).
5.Write a logical one to the EEMPE bit while writing a zero to EEPE in EECR.
6.Within four clock cycles after setting EEMPE, write a logical one to EEPE.
The EEPROM can not be programmed during a CPU write to the Flash memory. The software must check that the Flash programming is completed before initiating a new EEPROM write. Step 2 is only relevant if the software contains a Boot Loader allowing the CPU to program the Flash. If the Flash is never being updated by the CPU, step 2 can be omitted. See “Memory Programming” on page 368 for details about Boot programming.
Caution: An interrupt between step 5 and step 6 will make the write cycle fail, since the EEPROM Master Write Enable will time-out. If an interrupt routine accessing the EEPROM is interrupting another EEPROM access, the EEAR or EEDR Register will be modified, causing the interrupted EEPROM access to fail. It is recommended to have the Global Interrupt Flag cleared during all the steps to avoid these problems.
25
7593D–AVR–07/06

When the write access time has elapsed, the EEPE bit is cleared by hardware. The user software can poll this bit and wait for a zero before writing the next byte. When EEPE has been set, the CPU is halted for two cycles before the next instruction is executed.
• Bit 0 – EERE: EEPROM Read Enable
The EEPROM Read Enable Signal EERE is the read strobe to the EEPROM. When the correct address is set up in the EEAR Register, the EERE bit must be written to a logic one to trigger the EEPROM read. The EEPROM read access takes one instruction, and the requested data is available immediately. When the EEPROM is read, the CPU is halted for four cycles before the next instruction is executed.
The user should poll the EEPE bit before starting the read operation. If a write operation is in progress, it is neither possible to read the EEPROM, nor to change the EEAR Register.
The calibrated Oscillator is used to time the EEPROM accesses. Table 5-3 lists the typical programming time for EEPROM access from the CPU.
Table 5-3. |
EEPROM Programming Time |
|
|
Symbol |
|
Number of Calibrated RC Oscillator Cycles |
Typ Programming Time |
|
|
|
|
EEPROM write |
26,368 |
3.3 ms |
|
(from CPU) |
|
||
|
|
|
|
The following code examples show one assembly and one C function for writing to the EEPROM. The examples assume that interrupts are controlled (e.g. by disabling interrupts globally) so that no interrupts will occur during execution of these functions. The examples also assume that no Flash Boot Loader is present in the software. If such code is present, the EEPROM write function must also wait for any ongoing SPM command to finish.
26 AT90USB64/128 
7593D–AVR–07/06

 AT90USB64/128
AT90USB64/128
Assembly Code Example(1)
EEPROM_write:
; Wait for completion of previous write sbic EECR,EEPE
rjmp EEPROM_write
; Set up address (r18:r17) in address register out EEARH, r18
out EEARL, r17
; Write data (r16) to Data Register out EEDR,r16
; Write logical one to EEMPE sbi EECR,EEMPE
; Start eeprom write by setting EEPE sbi EECR,EEPE
ret
C Code Example(1)
void EEPROM_write(unsigned int uiAddress, unsigned char ucData)
{
/* Wait for completion of previous write */ while(EECR & (1<<EEPE))
;
/* Set up address and Data Registers */ EEAR = uiAddress;
EEDR = ucData;
/* Write logical one to EEMPE */
EECR |= (1<<EEMPE);
/* Start eeprom write by setting EEPE */
EECR |= (1<<EEPE);
}
Note: 1. See “About Code Examples” on page 8.
27
7593D–AVR–07/06
The next code examples show assembly and C functions for reading the EEPROM. The examples assume that interrupts are controlled so that no interrupts will occur during execution of these functions.
Assembly Code Example(1)
EEPROM_read:
; Wait for completion of previous write sbic EECR,EEPE
rjmp EEPROM_read
; Set up address (r18:r17) in address register out EEARH, r18
out EEARL, r17
; Start eeprom read by writing EERE sbi EECR,EERE
; Read data from Data Register in r16,EEDR
ret
C Code Example(1)
unsigned char EEPROM_read(unsigned int uiAddress)
{
/* Wait for completion of previous write */ while(EECR & (1<<EEPE))
;
/* Set up address register */ EEAR = uiAddress;
/* Start eeprom read by writing EERE */
EECR |= (1<<EERE);
/* Return data from Data Register */ return EEDR;
}
Note: 1. See “About Code Examples” on page 8.
5.3.5Preventing EEPROM Corruption
During periods of low VCC, the EEPROM data can be corrupted because the supply voltage is too low for the CPU and the EEPROM to operate properly. These issues are the same as for board level systems using EEPROM, and the same design solutions should be applied.
An EEPROM data corruption can be caused by two situations when the voltage is too low. First, a regular write sequence to the EEPROM requires a minimum voltage to operate correctly. Secondly, the CPU itself can execute instructions incorrectly, if the supply voltage is too low.
EEPROM data corruption can easily be avoided by following this design recommendation:
Keep the AVR RESET active (low) during periods of insufficient power supply voltage. This can be done by enabling the internal Brown-out Detector (BOD). If the detection level of the internal BOD does not match the needed detection level, an external low VCC reset Protection circuit can be used. If a reset occurs while a write operation is in progress, the write operation will be completed provided that the power supply voltage is sufficient.
28 AT90USB64/128 
7593D–AVR–07/06

AT90USB64/128
5.4I/O Memory
The I/O space definition of the AT90USB64/128 is shown in “Register Summary” on page 414.
All AT90USB64/128 I/Os and peripherals are placed in the I/O space. All I/O locations may be accessed by the LD/LDS/LDD and ST/STS/STD instructions, transferring data between the 32 general purpose working registers and the I/O space. I/O Registers within the address range 0x00 - 0x1F are directly bit-accessible using the SBI and CBI instructions. In these registers, the value of single bits can be checked by using the SBIS and SBIC instructions. Refer to the instruction set section for more details. When using the I/O specific commands IN and OUT, the I/O addresses 0x00 - 0x3F must be used. When addressing I/O Registers as data space using LD and ST instructions, 0x20 must be added to these addresses. The AT90USB64/128 is a complex microcontroller with more peripheral units than can be supported within the 64 location reserved in Opcode for the IN and OUT instructions. For the Extended I/O space from 0x60 - 0x1FF in SRAM, only the ST/STS/STD and LD/LDS/LDD instructions can be used.
For compatibility with future devices, reserved bits should be written to zero if accessed.
Reserved I/O memory addresses should never be written.
Some of the Status Flags are cleared by writing a logical one to them. Note that, unlike most other AVRs, the CBI and SBI instructions will only operate on the specified bit, and can therefore be used on registers containing such Status Flags. The CBI and SBI instructions work with registers 0x00 to 0x1F only.
The I/O and peripherals control registers are explained in later sections.
5.4.1General Purpose I/O Registers
The AT90USB64/128 contains three General Purpose I/O Registers. These registers can be used for storing any information, and they are particularly useful for storing global variables and Status Flags. General Purpose I/O Registers within the address range 0x00 - 0x1F are directly bit-accessible using the SBI, CBI, SBIS, and SBIC instructions.
5.4.2General Purpose I/O Register 2 – GPIOR2
Bit |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|
|
MSB |
|
|
|
|
|
|
LSB |
GPIOR2 |
Read/Write |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
|
Initial Value |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
5.4.3General Purpose I/O Register 1 – GPIOR1
Bit |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|
|
MSB |
|
|
|
|
|
|
LSB |
GPIOR1 |
Read/Write |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
|
Initial Value |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
5.4.4General Purpose I/O Register 0 – GPIOR0
Bit |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|
|
MSB |
|
|
|
|
|
|
LSB |
GPIOR0 |
Read/Write |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
R/W |
|
Initial Value |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
29
7593D–AVR–07/06

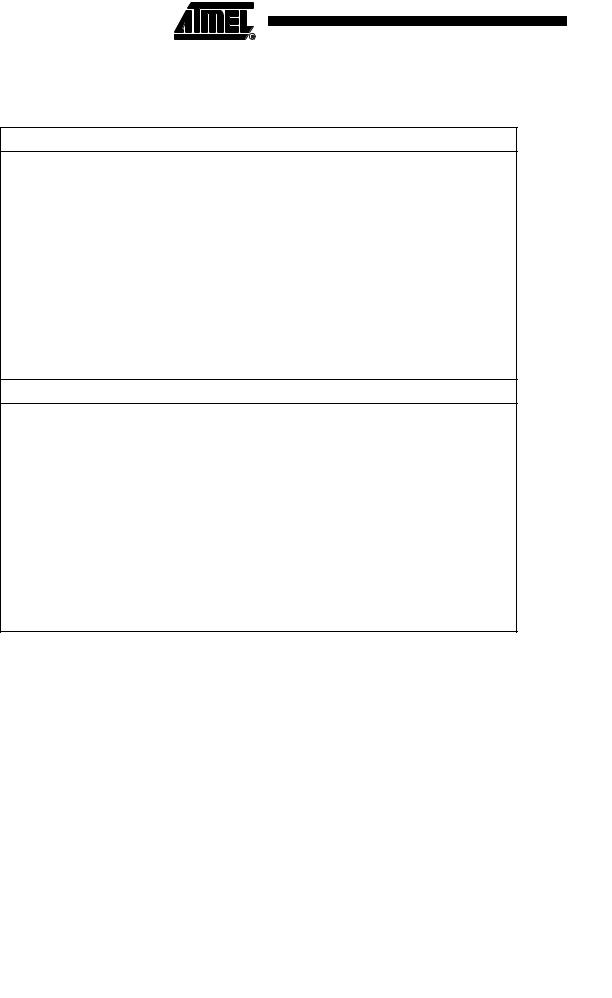
5.5External Memory Interface
With all the features the External Memory Interface provides, it is well suited to operate as an interface to memory devices such as External SRAM and Flash, and peripherals such as LCDdisplay, A/D, and D/A. The main features are:
•Four different wait-state settings (including no wait-state).
•Independent wait-state setting for different external Memory sectors (configurable sector size).
•The number of bits dedicated to address high byte is selectable.
•Bus keepers on data lines to minimize current consumption (optional).
5.5.1Overview
When the eXternal MEMory (XMEM) is enabled, address space outside the internal SRAM becomes available using the dedicated External Memory pins (see Figure 2-1 on page 5, Table 10-3 on page 81, and Table 10-9 on page 85). The memory configuration is shown in Figure 5-4.
Figure 5-4. External Memory with Sector Select
Memory Configuration A
0x0000
Internal memory
ISRAM end
XMem start
Lower sector
SRW01
SRW00
SRL[2..0]
External |
Memory |
Upper sector |
|
(0-60K |
x 8) |
||
|
SRW11
SRW10
0xFFFF
5.5.2Using the External Memory Interface
The interface consists of:
•AD7:0: Multiplexed low-order address bus and data bus.
•A15:8: High-order address bus (configurable number of bits).
•ALE: Address latch enable.
•RD: Read strobe.
•WR: Write strobe.
The control bits for the External Memory Interface are located in two registers, the External
Memory Control Register A – XMCRA, and the External Memory Control Register B – XMCRB.
30 AT90USB64/128 
7593D–AVR–07/06
Loading...