

Page 1
The Control System 1
Installing the
SINUMERIK 802D
SINUMERIK 802D base line
Commissioning Manual
Control System
Commissioning 3
Starting up the Spindle 4
Starting up the PLC 5
Series Machine Start−up
Data Backup
Software Update 7
2
6
Valid for
Control system Software version
SINUMERIK 802D 2
SINUMERIK 802D base line 1
802D Machine and
Setting Data
802D base line
Machine and Setting Data
8
9
Start−up ISO mode 10
08/2005 Edition
Page 2
Safety information
This Manual contains information which you should carefully observe to ensure your own personal safety
and the prevention of material damage. The notices are highlighted by a warning triangle and, depending on
the degree of hazard, represented as shown below:
Danger
!
indicates that death or severe personal injury will result if proper precautions are not taken.
Warning
!
indicates that death or severe personal injury can result if proper precautions are not taken.
Caution
!
with a warning triangle indicates that minor personal injury can result if proper precautions are not taken.
Caution
without a warning triangle means that material damage can occur if the appropriate precautions are not
taken.
Attention
indicates that an undesired event or status can occur if the appropriate note is not observed.
If several hazards of different degrees occur, the hazard with the highest degree must always be given preference. If a warning note with a warning triangle warns of personal injury, the same warning note can also
contain a warning of material damage.
Qualified personnel
Start−up and operation of the device/equipment/system in question must only be performed using this documentation. The start−up and operation of a device/system must only be performed by qualified personnel.
Qualified personnel as referred to in the safety guidelines in this documentation are those who are authorized to start up, ground and label units, systems and circuits in accordance with the relevant safety standards.
Proper use
Please note the following:
Warning
!
The device must only be used for the applications described in the Catalog and only in combination with the
equipment, components and devices of other manufacturers as far as this is recommended or permitted by
Siemens. It is assumed that this product be transported, stored and installed as intended and maintained
and operated with care to ensure that the product functions correctly and properly.
Trademarks
All designations marked with the copyright notice ® are registered trademarks of Siemens AG. Other names
in this publication might be trademarks whose use by a third party for its own purposes may violate the rights
of the registered holder.
Disclaimer of liability
Although we have checked the contents of this publication for agreement with the hardware and software
described, since differences cannot be totally ruled out. Nonetheless, differences might exist and therefore
we cannot guarantee that they are completely identical. The information given in this publication is reviewed
at regular intervals and any corrections that might be necessary are made in the subsequent editions.
Siemens AG
Automation and Drives
Postfach 4848
90437 NÜRNBERG
GERMANY
Copyright (E ) Siemens AG 2005.
6FC5697−2AA00−1BP5
Siemens AG 2005
Subject to change without prior notice.
Page 3
Preface
SINUMERIK Documentation
The SINUMERIK Documentation is organized in 3 levels:
S General Documentation:
S User Documentation
S Manufacturer/Service Documentation:
For detailed information regarding further publications about SINUMERIK 802D, as well as
for publications that apply for all SINUMERIK control systems (e.g. Universal Interface, Measuring Cycles...), please contact your Siemens branch office.
A monthly overview of publications with specification of the available languages can be found
on the Internet at:
http://www.siemens.com/motioncontrol
Follow the menu items ”Support”/”Technical Documentation”/”Overview of Publications”.
The Internet edition of DOConCD − DOConWEB − can be found at:
http://www.automation.siemens.com/doconweb
Addressees of the documentation
Standard scope
Hotline
The present documentation is aimed at the machine tool manufacturer. This publication provides detailed information required for the machine tool manufacturer to start up the SINUMERIK 802D control system.
The present Instruction Manual describes the functionality of the standard scope. Any
amendments made by the machine manufacturer are documented by the machine manufacturer.
Other functions not described in this documentation can possibly also be performed on the
control system. However, the customer is not entitled to demand these functions when the
new equipment is supplied or servicing is carried out.
If you have any questions, do not hesitate to call our hotline:
A&D Technical Support
Tel.: +49 (0) 180 / 5050 − 222
Fax: +49 (0) 180 / 5050 − 223
Internet: http://www.siemens.de/automation/support−request
If you have any questions (suggestions, corrections) regarding the Documentation, please
send a fax to the following number or an e−mail to the following address:
Fax: +49 (0) 9131 / 98 − 63315
E−mail: motioncontrol.docu@siemens.com
Fax form: see return fax form at the end of this publication
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
iii
Page 4

Preface
Internet address
http://www.siemens.com/motioncontrol
iv
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 5

Contents
1 The SINUMERIK 802D Control System 1-9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Components of the SINUMERIK 802D 1-9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Technical specifications 1-12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Installing the Control System 2-15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Installing and removing the SINUMERIK 802D 2-15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Interfaces and lines 2-25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Connecting the individual components 2-29 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1 Connecting the keyboard 2-29 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.2 Connecting handwheels to the PCU 2-29 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.3 Terminal configuration of the RS232 interface (COM1) on the PCU 2-30 . . . . . . . . . . . . . . . . . . .
2.3.4 Connecting the I/Os to PP 72/48 2-31 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.5 Connecting the ADI4 module 2-33 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Connecting the SIMODRIVE 611U drive unit 2-33 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5 Connecting the Profibus 2-34 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6 Grounding 2-36 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.7 Power supply of PCU (X8) and PP 72/48 (X1) 2-37 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.8 Displays on the PCU 2-38 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.9 Displays on the PP 72/48 2-39 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Contents
3 Commissioning 3-41 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 General 3-41 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.1 Access levels 3-42 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.2 Structure of machine data (MD) and setting data (SD) 3-43 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Turning on and booting the control system 3-44 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Language setting 3-45 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Setting the technology 3-46 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5 Entering the machine data 3-48 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.6 Setting the Profibus address 3-49 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.7 Starting up the PLC 3-51 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.8 Starting up the axes/spindle 3-52 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.8.1 Setpoint/actual value assignment 3-52 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.8.2 Default settings for the axis machine data for the feed axes 3-54 . . . . . . . . . . . . . . . . . . . . . . . . .
3.8.3 Connecting a direct measuring system 3-55 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.8.4 Default settings for the axis machine data for the spindle 3-59 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.9 Completing the start−up 3-60 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.10 Service display for the axis drive behavior 3-60 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Starting up the Spindle 4-61 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Digital spindle drive with spindle actual−value encoder integrated into the motor 4-63 . . . . . . . .
4.2 Digital spindle drive with spindle actual−value encoder (TTL)
mounted directly on the motor 4-64 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Digital spindle drive with the encoder integrated into the motor,
gearbox and external zero mark via BERO 4-65 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Digital spindle without external encoder 4-67 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
v
Page 6

Contents
4.4.1 Parameterization using the Drive Configuration Wizard 4-67 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.2 Parameterization using the Expert List 4-67 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.3 Adapting the machine data in the control system 4-68 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5 Digital spindle without encoder with external TTL encoder 4-69 . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.1 Parameterization using the Expert List 4-69 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.2 Adapting the machine data in the control system 4-70 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6 Analog spindle (via 611 U(E)) with with spindle actual−value encoder mounted directly on the motor . . . . . .
4-71
4.7 Analog axis/spindle with TTL encoder via ADI4 4-74 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.8 Digital axis/spindle with direct measuring system (TTL) via ADI4 4-76 . . . . . . . . . . . . . . . . . . . . .
5 Starting up the PLC 5-79 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Commissioning the PLC 5-80 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Start−up modes of the PLC 5-80 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 PLC alarms 5-82 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.1 General PLC alarms 5-83 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.2 User alarms 5-83 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4 PLC programming 5-85 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.1 Command overview 5-87 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.2 Explanation of the stack operations 5-89 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.3 Program organization 5-96 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.4 Data organization 5-96 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.5 Interface to the control system 5-96 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.6 Testing and monitoring your program 5-97 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5 PLC applications ”Download/Upload/Copy/Compare” 5-98 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6 User interface 5-100 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Series Machine Start−Upand Data Backup 6-101 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Series machine start−up 6-101 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Data backup 6-104 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.1 Internal data backup 6-104 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.2 External data backup via V24 6-104 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.3 External data backup via NC card 6-105 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Formatting an NC card 6-107 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4 Data backup in case of backlight failure 6-108 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 Software Update via NC card 7-109 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8 Machine and Setting Data 802D 8-111 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1 List of machine data 8-112 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1.1 Display machine data 8-112 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1.2 General machine data 8-117 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1.3 Channel−specific machine data 8-120 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1.4 Axis−specific machine data 8-127 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2 Setting data 8-137 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9 Machine and Setting Data 802D base line 9-141 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1 List of machine data 9-142 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1.1 Display machine data 9-142 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1.2 General machine data 9-147 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1.3 Channel−specific machine data 9-148 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1.4 Axis−specific machine data 9-151 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
vi
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 7

9.2 Setting data 9-160 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10 Start−Up ISO Mode (with 802D only) 10-163 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.1 1. Setup 10-163 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.1.1 Turning variant 10-163 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.1.2 Milling variant 10-164 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.2 Machine data 10-164 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.2.1 Decimal point programming 10-164 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.2.2 Linear path control at rapid traverse rate G00 10-164 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.2.3 Spindle positioning M19 10-165 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.2.4 Blueprint programming (for the turning technology only) 10-165 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.2.5 Tool compensation (for the turning technology only) 10-165 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.3 Functions 10-166 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Contents
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
vii
Page 8
Contents
Platz für Notizen
viii
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 9

The SINUMERIK 802D Control System
1.1 Components of the SINUMERIK 802D
Hardware components
S PCU (Panel Control Unit): Component of the control system for max. 4 axes and one
spindle, with graphical display, softkey menu and NC card slot
S KB (keyboard): horizontal or vertical design
S MCP: Machine control panel
S PP 72/48 (Profibus I/Os): 72 digital inputs, 48 digital outputs
S ADI4 (analog drive interface for 4 axes)
S Drive module
− SIMODRIVE 611UE closed−loop control module
− PROFIBUS DP option module
Software components
1
S System software on the permanent flash memory of the PCU
− Boot software
starts the system
− Human Machine Interface (HMI)
realizes all operator functions
− NCK software (NC Kernel)
realizes all NC functions. It controls one ”NC channel ” with up to 5 axes (2 of them
can be configured as spindles).
− Programmable Logic Control (PLC)
executes the integrated PLC user program cyclically.
S Toolbox
− Setup files for turning and milling
− Configuration file for transformations with turning
− Cycle package for turning and milling
− WINPCIN transfer program for transferring user data and programs between PC and
NC
− Reloadable languages
− Text manager
− PLC user library
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
1-9
Page 10
The SINUMERIK 802D Control System
1.1 Components of the SINUMERIK 802D
− SimoCom U Parameterization and Commissioning Tool for Drives
− SIMODRIVE 611 UE Firmware
− PLC 802 Programming Tool
Note
Please always observe the readme file supplied with the ”Toolbox”. It provides up−to−date
information.
User data
The user data include:
S Machine data
S Setting data
S Tool data
S R parameters
S Work offsets
S Offset data
S Part programs
S Standard cycles
S PLC user program
S PLC alarms
Note
After turning off or in case of power failure, changed user data are stored for at least 50 h.
Thereafter, they can be lost if they are not permanently stored by appropriate operator actions (see Section 6.2.1)
1-10
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 11
The SINUMERIK 802D Control System
1.1 Components of the SINUMERIK 802D
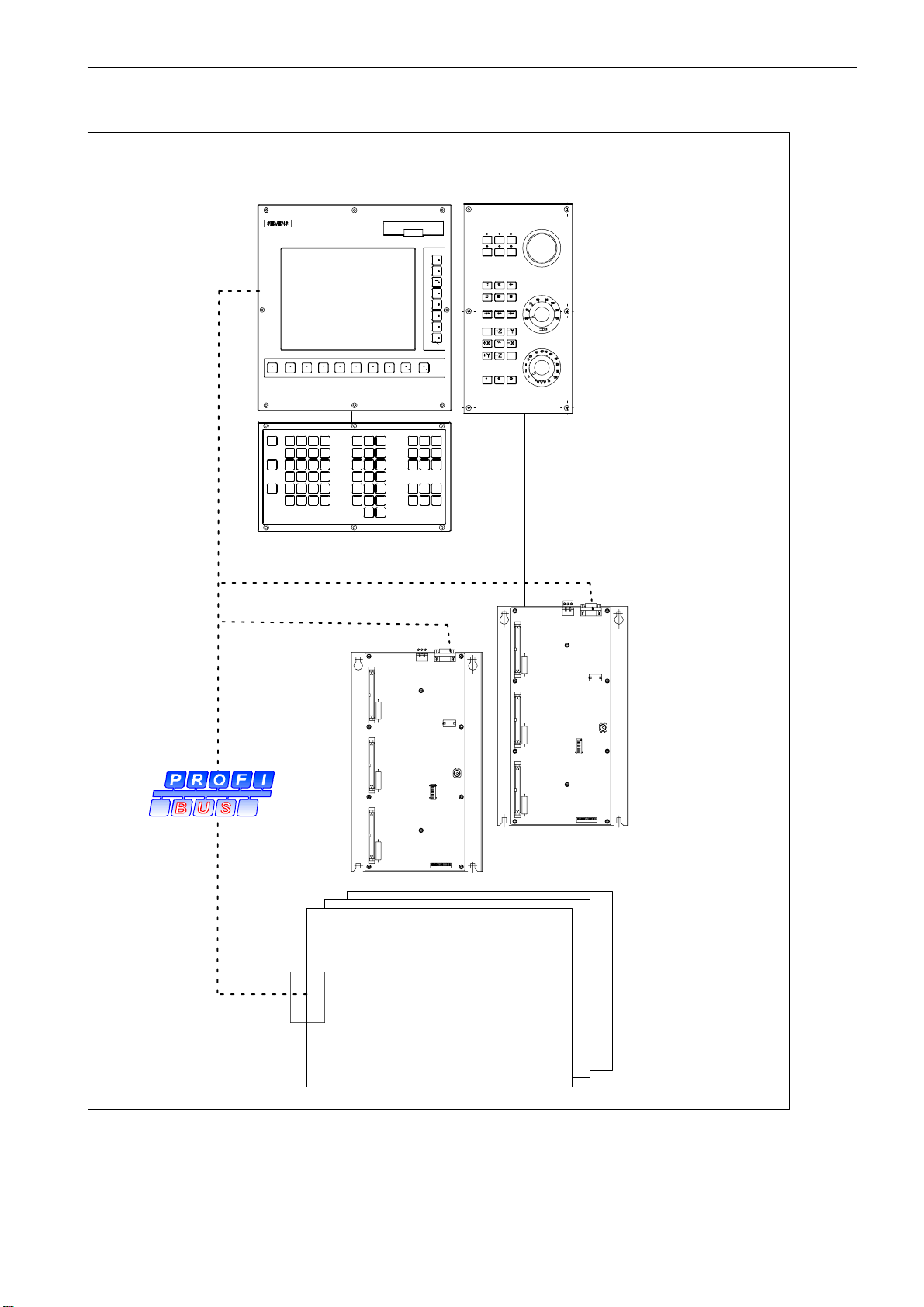
PCU
(control system)
KB (operator panel)
Machine control panel
(MCP)
JOG Ref Point
[VAR]
Auto Single Block
MDA
Spindle CCW
Spindle CWSpindle CW
Rapid
Reset Cycle STOP
Cycle START
PROCESS FIELD BUS
SIMODRIVE
611UE closed−loop control
module
PROFIBUS DP
option module
Fig. 1-1 Hardware components of the SINUMERIK 802D
PP 72/48
(input/output module)
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
1-11
Page 12
The SINUMERIK 802D Control System
1.2 Technical specifications
1.2 Technical specifications
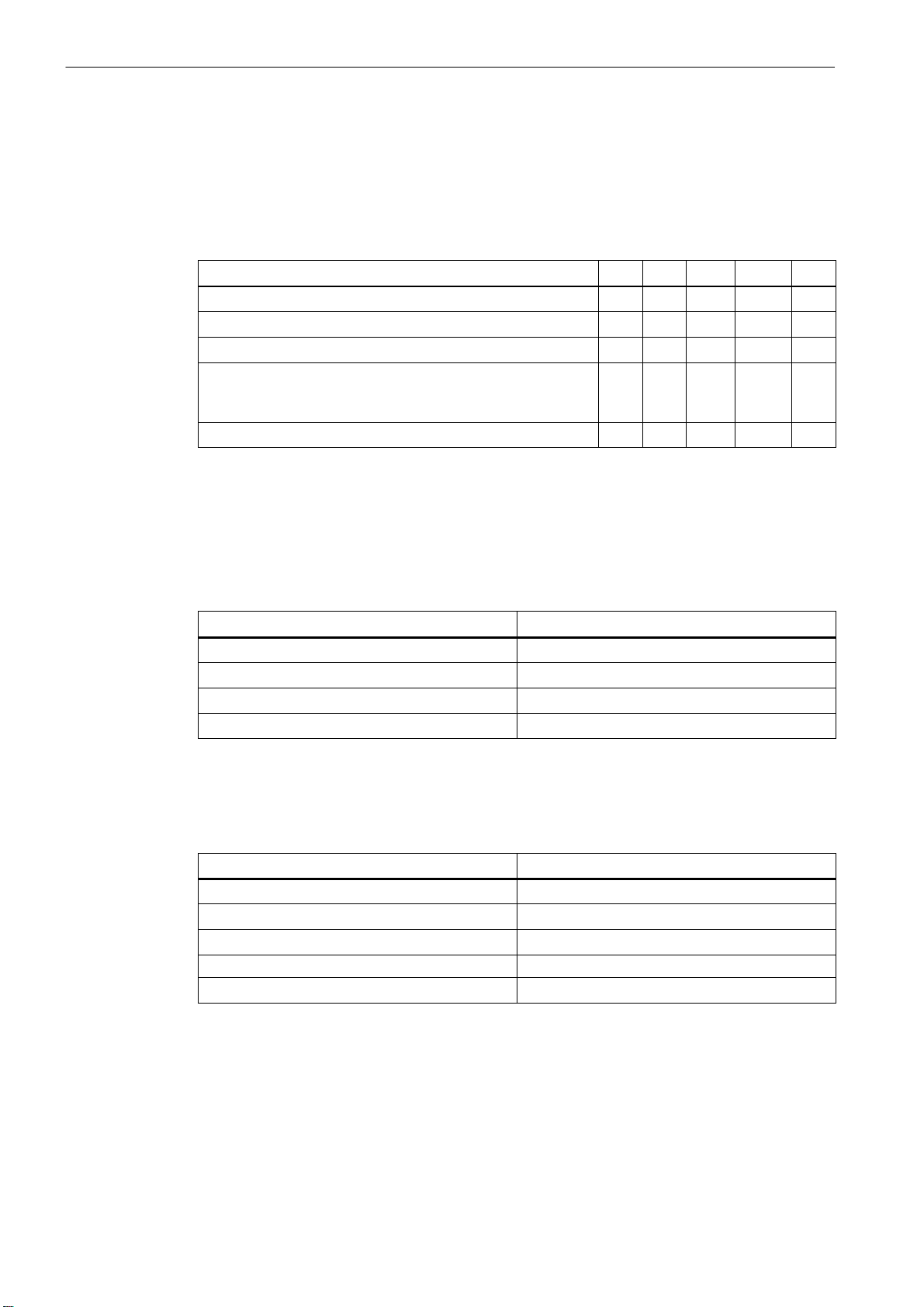
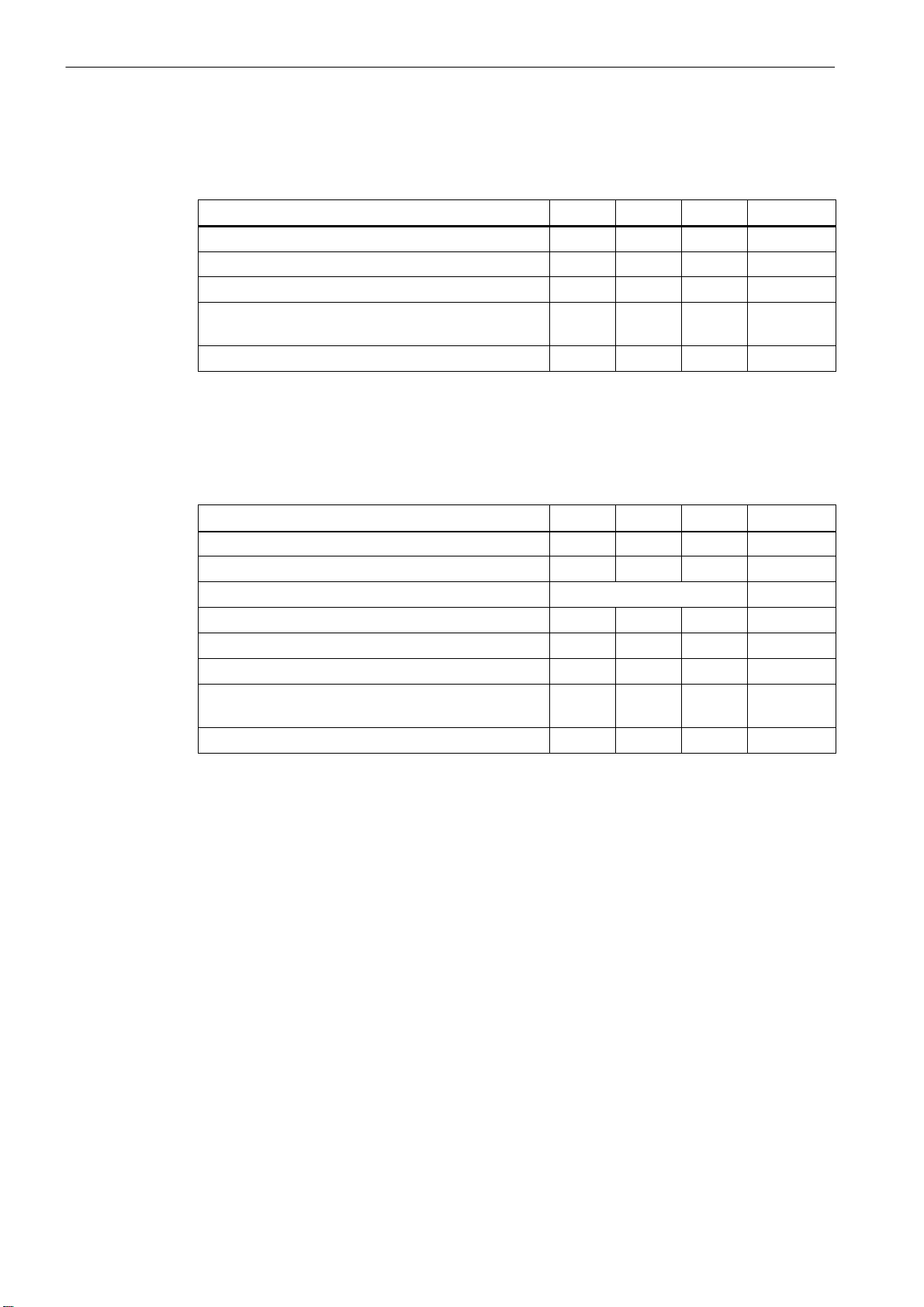
Connected loads
Table 1-1 Connected loads
Weight
Parameters
Supply voltage 20.4 28.8 V
Ripple 3.6 Vss
24 V current consumption 1 A *
Power dissipation of the PCU including KB
Power dissipation of the MCP
Power dissipation of the PP 72/48
Starting current, total 2.6 A
* Basic configuration from PCU, KB, MCP and PP 72/48;
all outputs open
** with nominal load
Table 1-2 Weight
Component
PCU 4.9 kg
KB 1.7 kg
MCP 1.5 kg
PP 72/48 1.2 kg
min. typ. max. Unit
50
<5
11
Weight
W
W
W
**
Dimensions
Table 1-3 Dimensions of the individual components
Component
PCU 310 x 330 x 85
KB, horizontal design 310 x 175 x 32
KB, vertical design 172 x 330 x 32
MCP 170 x 330 x 128
PP 72/48 194 x 325 x 35
Dimensions WxHxD [mm]
1-12
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 13
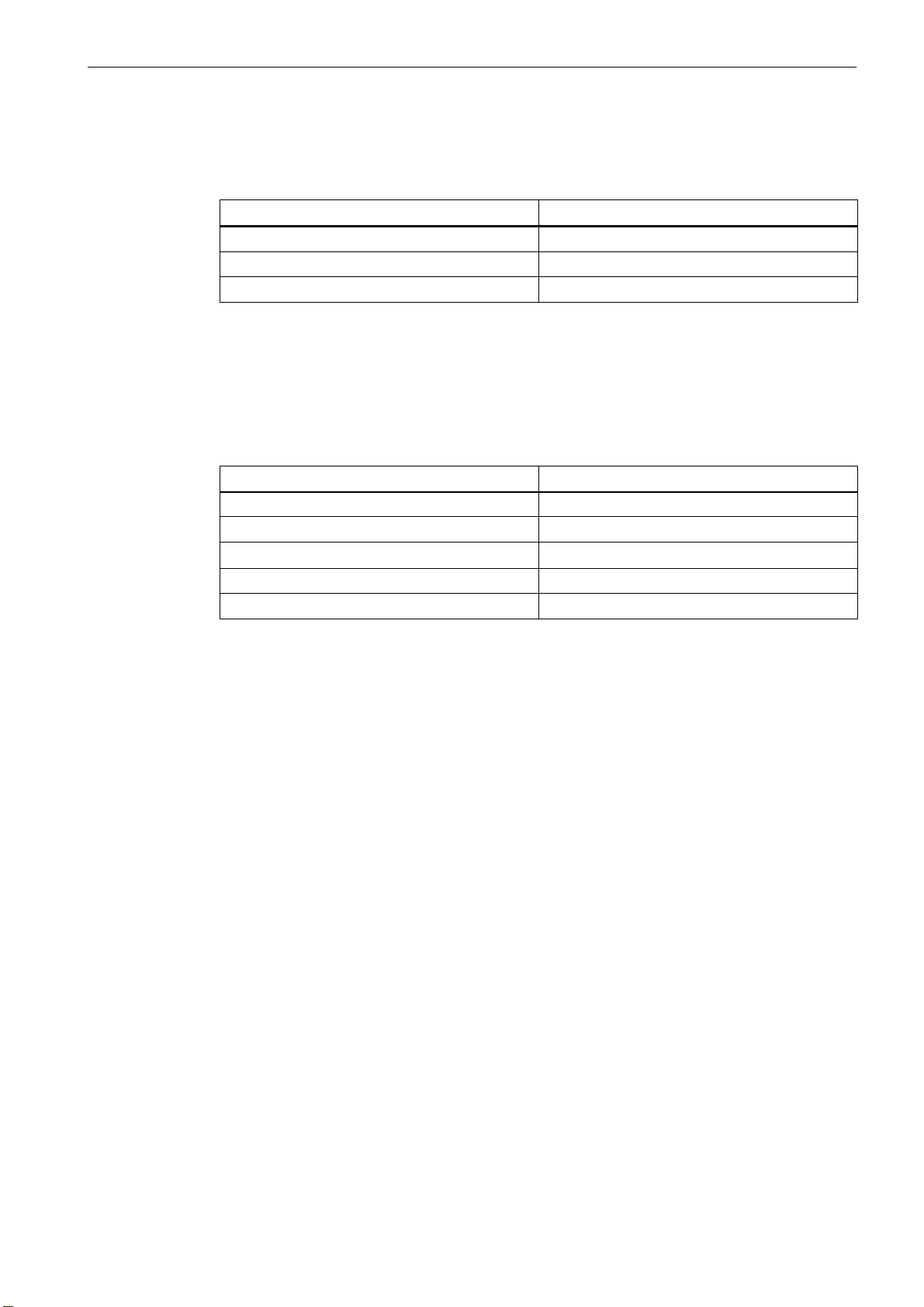
Ambient conditions during operation
Table 1-4 Ambient conditions during operation
Parameters
Temperature range 0...50 °C
Permissible relative humidity 5...95 %, not condensing
Air pressure 700...1,060 hPa
The conditions during operation comply with IEC 1131-2.
The control system is to be intended for installation in a housing (e.g. cubicle).
Transport and storage conditions
Table 1-5 Transport and storage conditions
Parameter
Temperature range -20...60 °C
Permissible relative humidity 5...95 %, not condensing
Air pressure 700...1,060 hPa
Transport height -1,000...3,000 m
Free fall in transport package v 1,200 mm (PP 72/48 v 1,000 mm)
The SINUMERIK 802D Control System
1.2 Technical specifications
Protective quality and degree of protection
Class of protection I to IEC 536.
No connection to protective−conductor terminal is required.
Protection from foreign matter and penetrating water to IEC 529.
S For the PCU : IP 65 (front)
IP 00 (rear)
S For the keyboard : IP 65 (front)
IP 00 (rear)
S For the MCP : IP 54 (front)
IP 00 (rear)
S PP 72/48 IP 00
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
1-13
Page 14
The SINUMERIK 802D Control System
1.2 Technical specifications
PP 72/48
Table 1-6 Digital inputs
Parameter
U
H
I
at U
in
H
U
L
I
at U
in
L
min typ max Unit
15 24 30 V
2 15 mA
−30 0 +5 V
not defi-
15 mA
ned
Signal delay caused by the hardware 0.5 3 ms
A voltage of 24V for controlling the digital inputs is provided at pin 2 of the interfaces X111,
X222 and X333.
Max. current on pin 2 I
Table 1-7 Digital outputs (high−side driver)
Parameter
U
H
I
at UH and 100% simultaneity factor 250 mA
out
U
L
I
out
Signal delay caused by the hardware 0.5 ms
Switching rate for the ohmic load 100 Hz
Switching rate for the inductive load (free−wheeling
diode required)
at U
(leakage current) 50 400 µA
L
out
=0.5A
min typ max Unit
Vcc − 3V V
cc
Output open
2 Hz
V
Switching rate for the lamp load 11 Hz
The 24V voltage for the digital outputs must be connected to all 4 pins 47, 48, 49, 50.
Max. 1A may flow per supply pin.
1-14
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 15
Installing the Control System
2.1 Installing and removing the SINUMERIK 802D
Warning
!
Procedure
Before installing the control system, make absolutely sure that the system is disconnected
form the mains and deenergized!
The modules contain electrostatic sensitive devices.
When handling the modules, make sure that neither p.c.boards, nor components are
touched by persons not grounded with ESD protection.
1. Install the PCU, the keyboard (KB) and the machine control panel (MCP).
Attention! The maximum permissible torque for tightening the fastening screws
is 1.8 Nm and must not be exceeded.
2
2. Install the PP 72/48.
3. Installing the drive compound (see SIMODRIVE 611 UE Documentation)
4. Establish the connection between PCU and keyboard, as well as between MCP and PP
72/48.
5. Establish the PROFIBUS connection between PCU, PP 72/48 and SIMODRIVE 611 UE.
Removing the control system
To remove the control system, proceed in the reverse order.
Warning
!
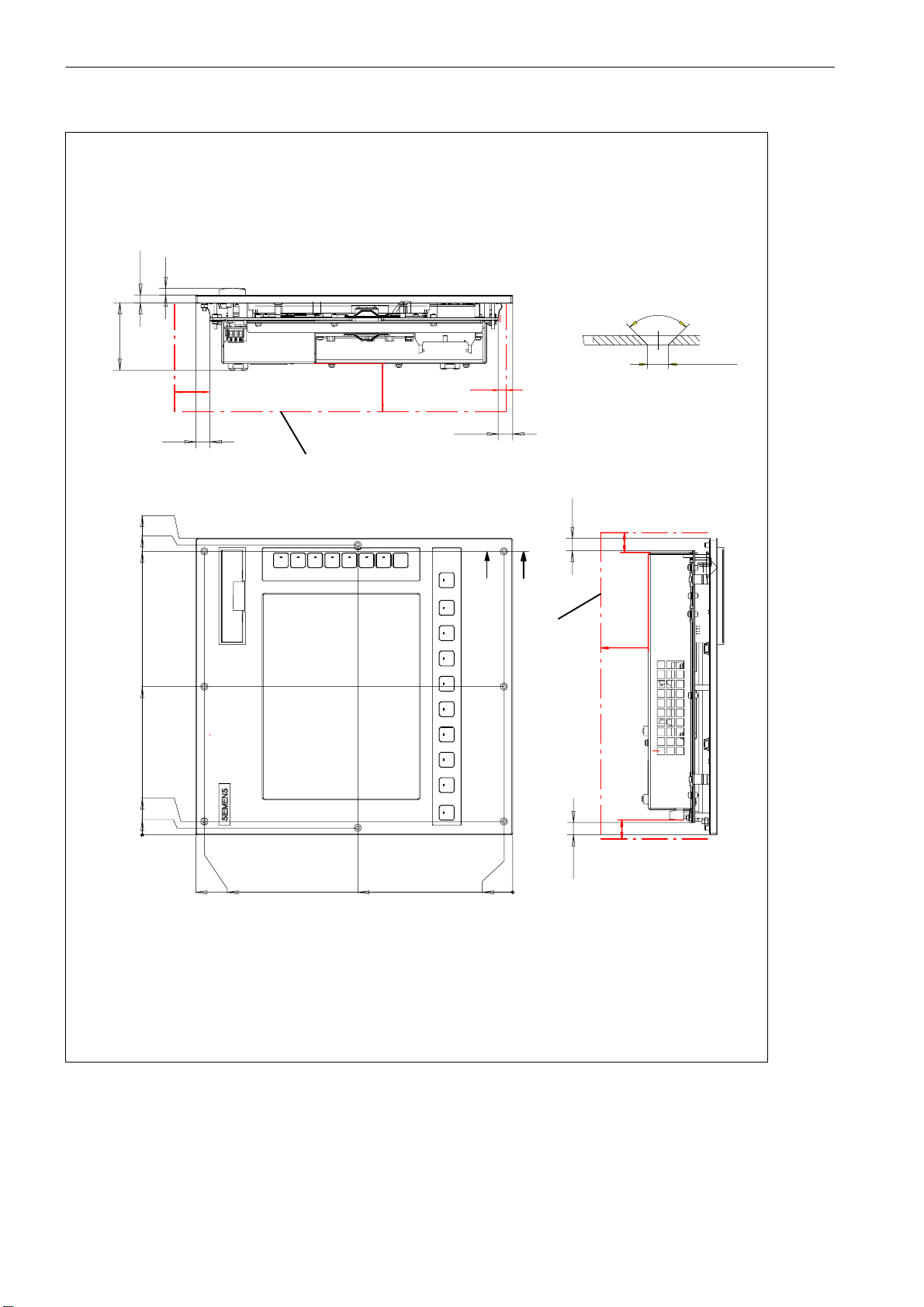
Mounting dimensions
Before removing the control system, make absolutely sure that the system is disconnected
form the mains and deenergized!
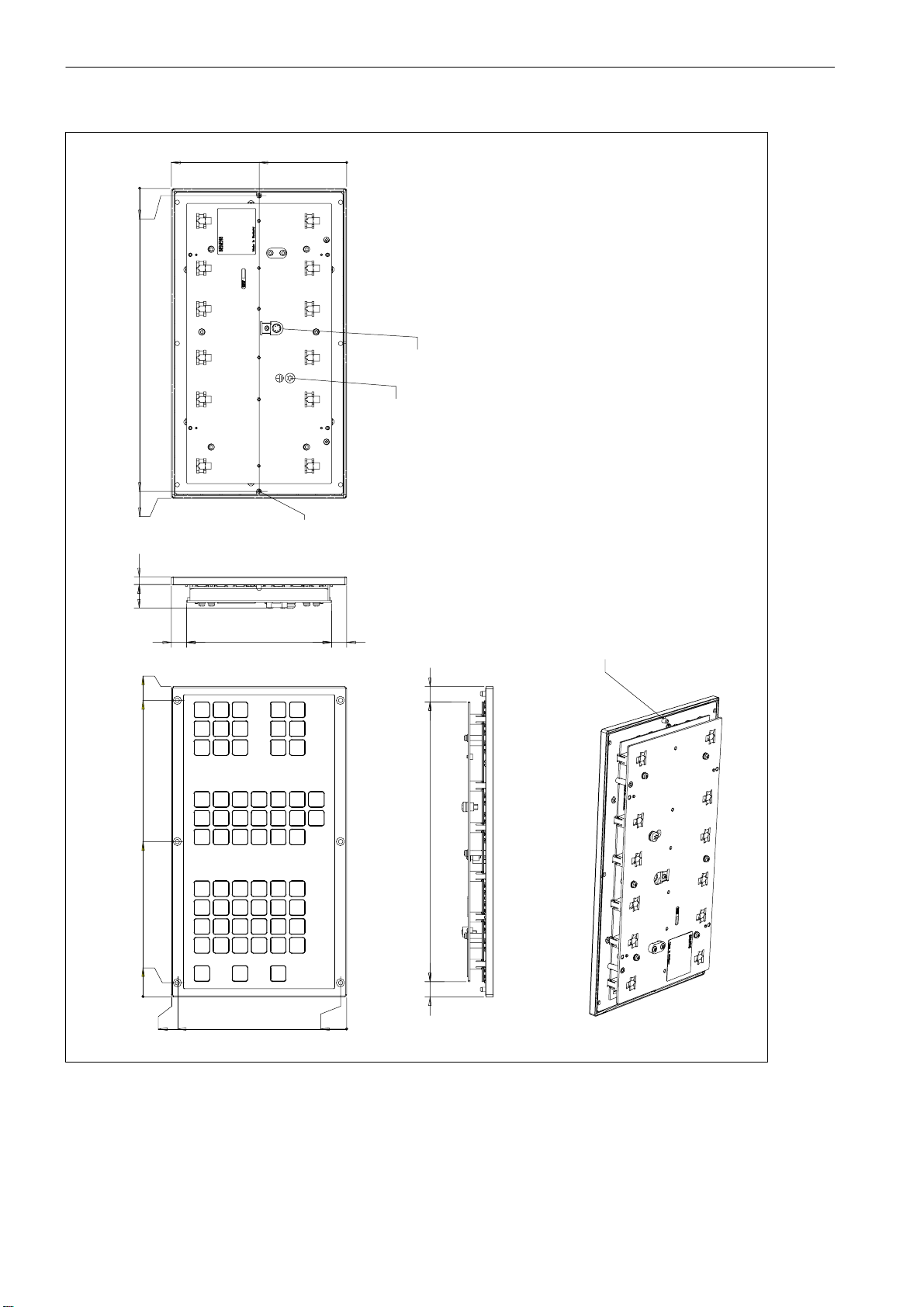
Note
When installing the control components, observe the dimensions specified in the diagrams
below. These drilling patterns constitute the basis for preparing the mounting holes. The dimensions are binding.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
2-15
Page 16
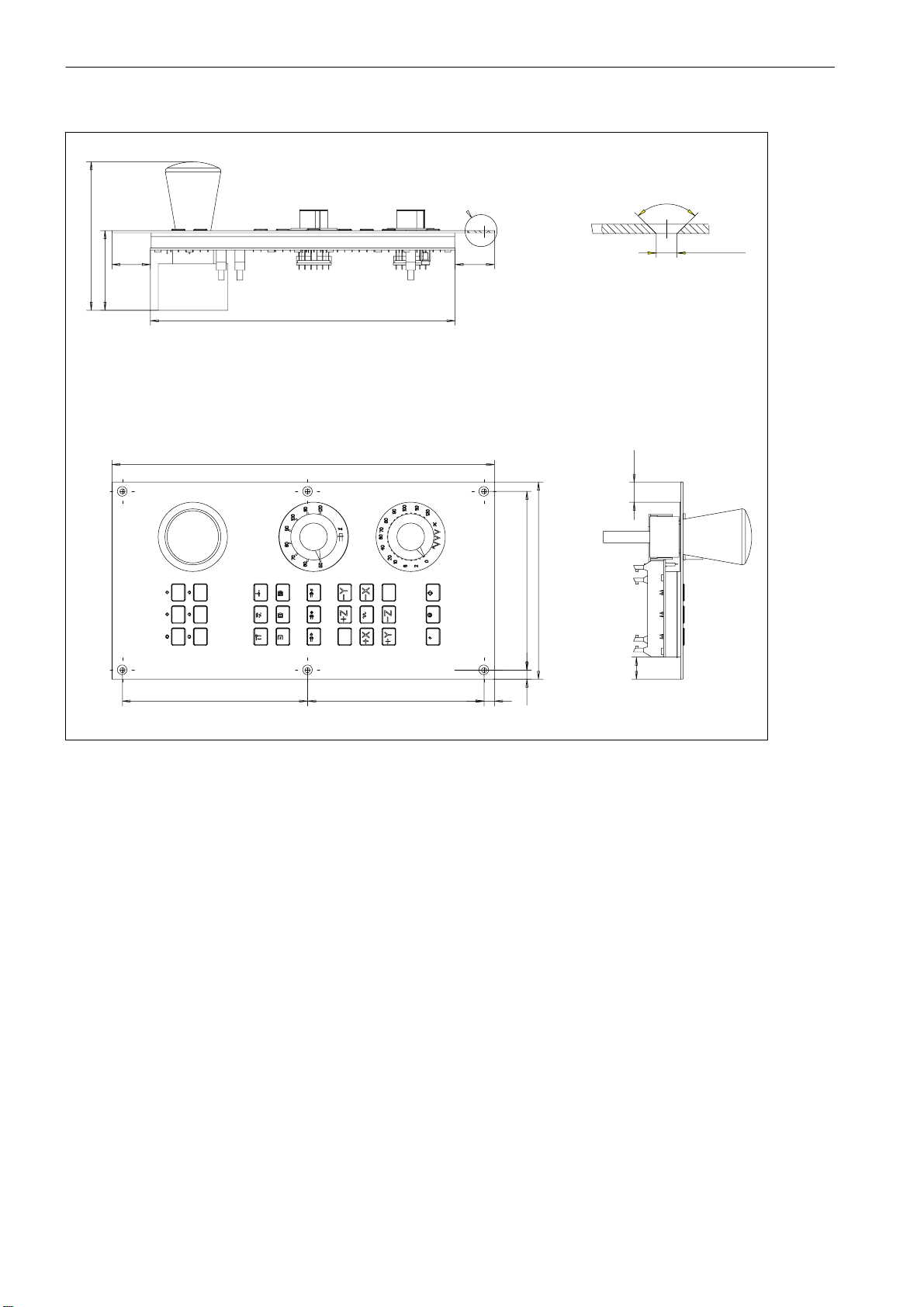
Installing the Control System
2.1 Installing and removing the SINUMERIK 802D
7
8.2
70
35
50
90_
ø (X8)4.5
5
A-A
309.4
302.2
295.6
154.7
13.8
7.2
0
15
Required clearance
15
13
20
A
A
50
Required clearance
20
13
330
321
Fig. 2-1 PCU mounting dimensions
2-16
161.2
0
9
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 17
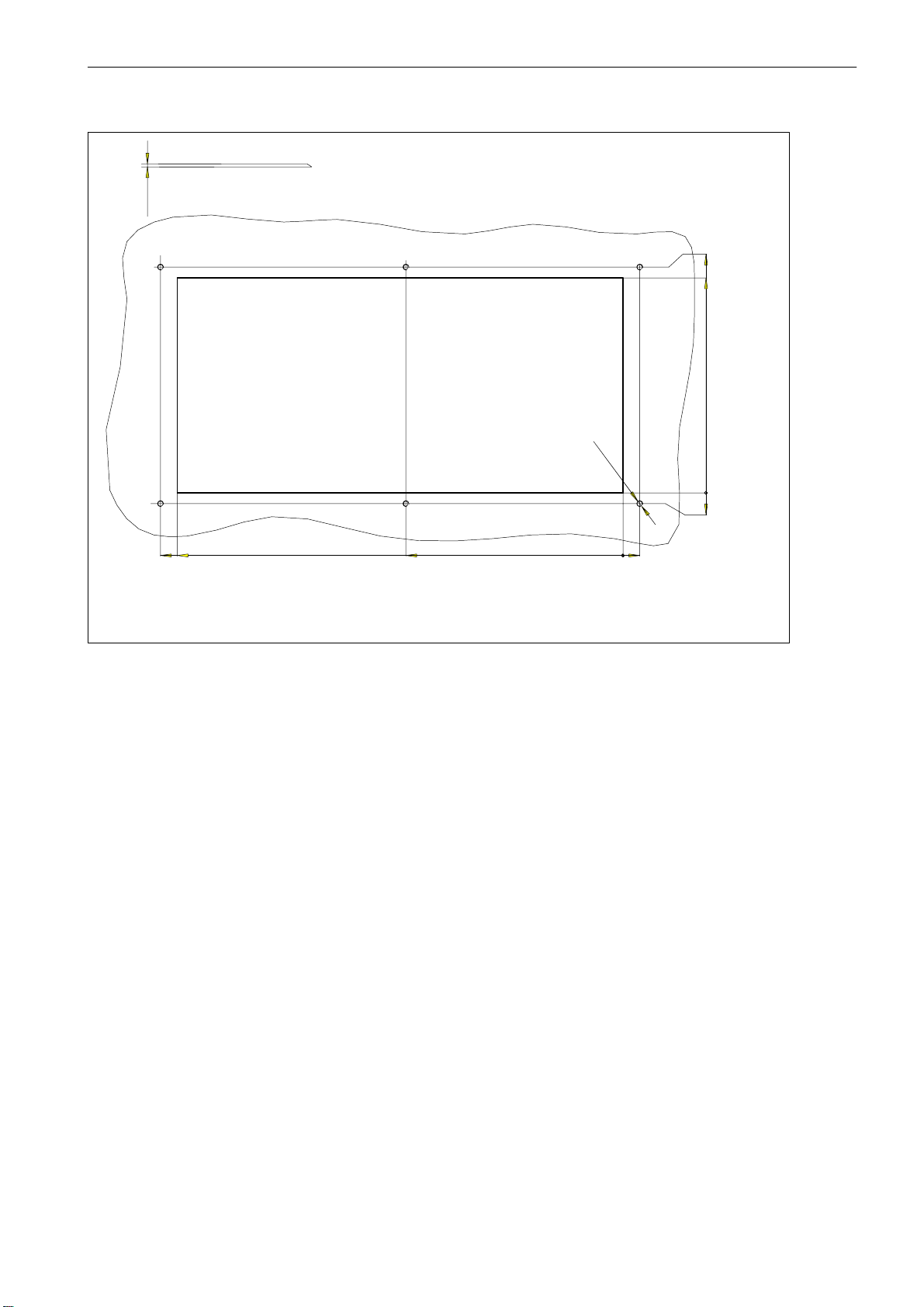
Installing the Control System
2.1 Installing and removing the SINUMERIK 802D
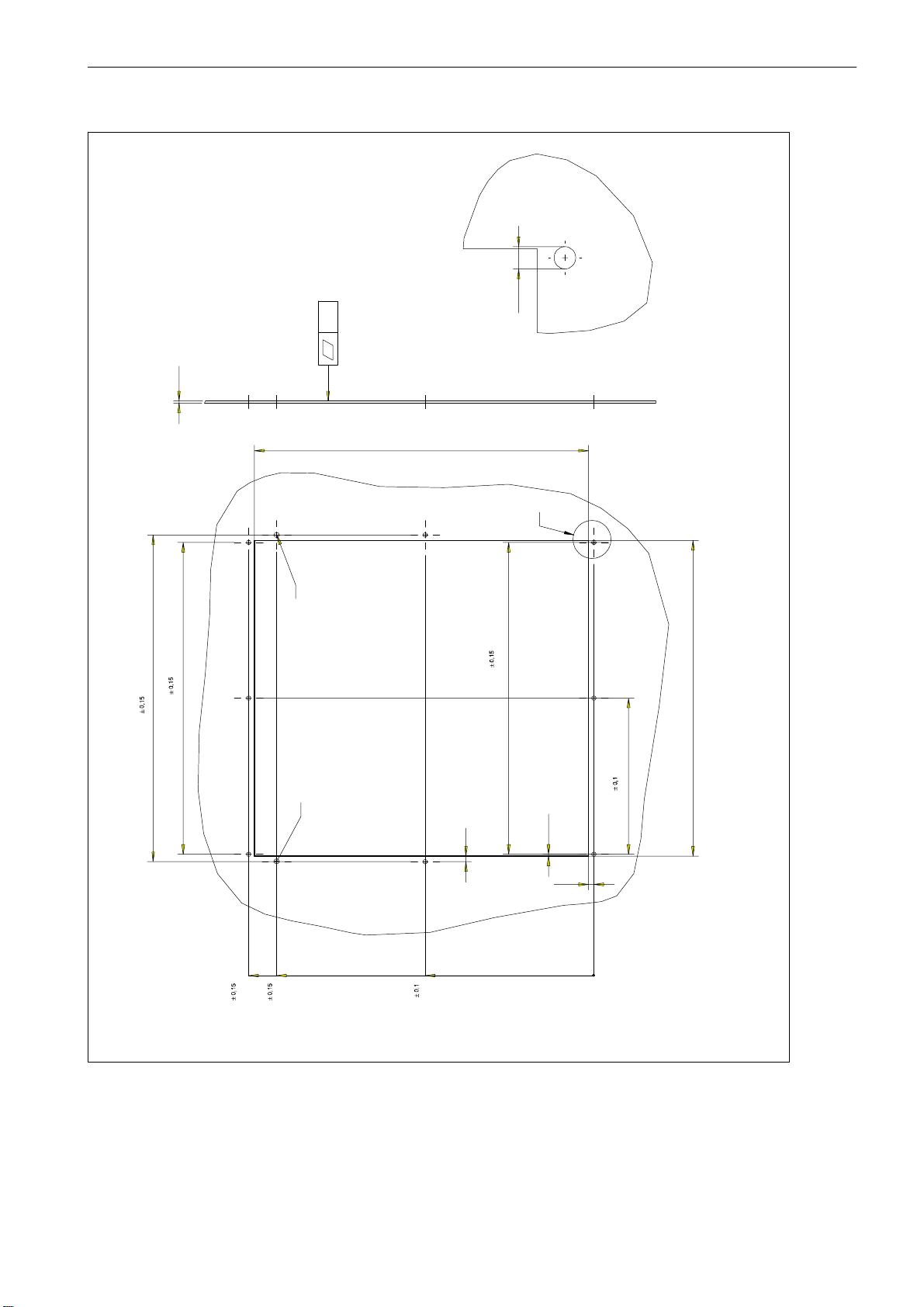
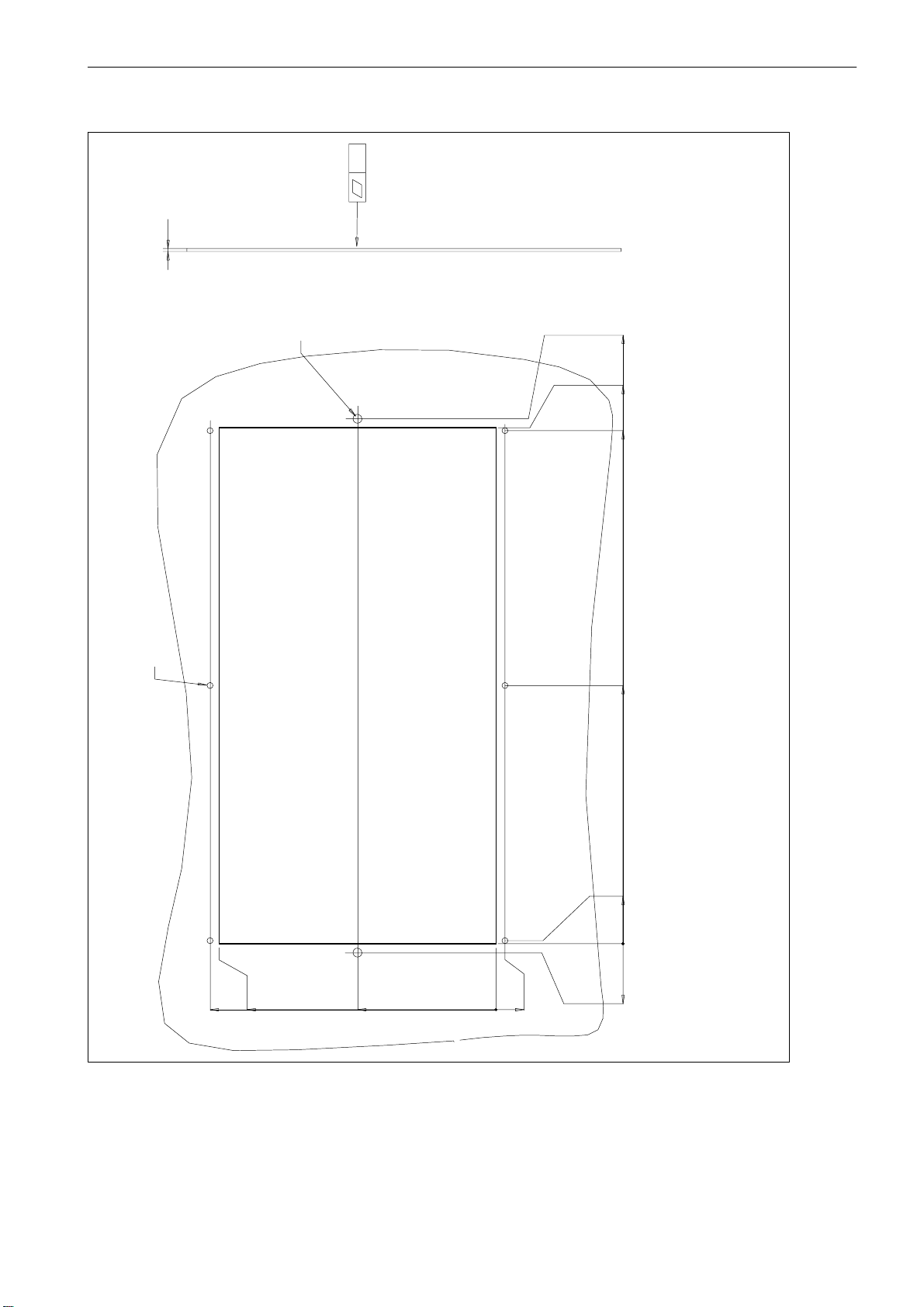
Panel cutout
Panel cutout
Z
0.5
+3
2
+0.3
302
1)
M4
295
281.8
Z
2)
281.8
2)
5
1.6
5
140.9
+0.3
285
312
286.6
Fig. 2-2 Drilling pattern for the PCU
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
152.2
0
1) M4 rivet−down, insert nut or M4 extruded hole (8x)
2) Drill holes for fixing the position ø 5.2 mm (2x)
2-17
Page 18
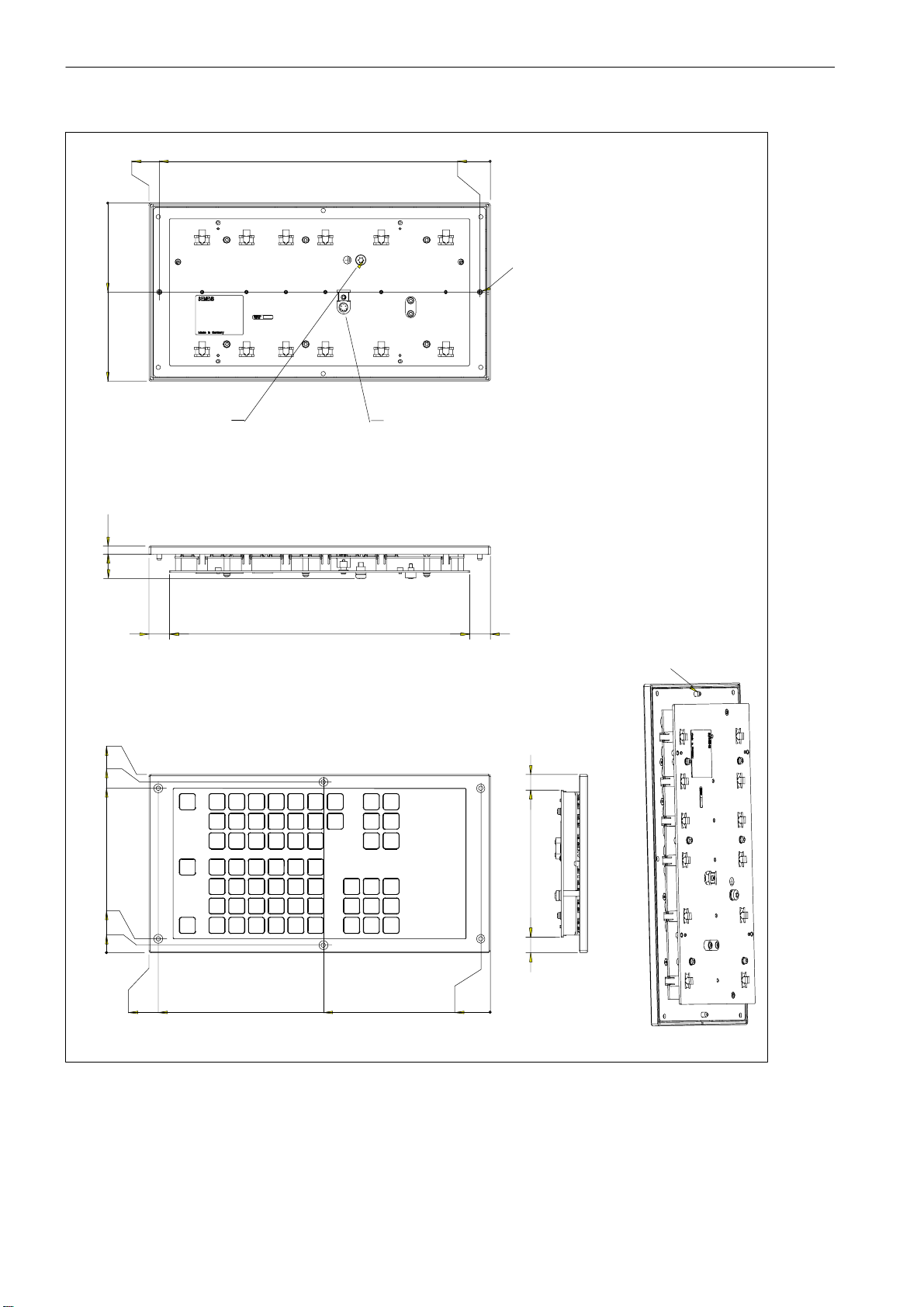
Installing the Control System
2.1 Installing and removing the SINUMERIK 802D
128
68.7
A
33
263
330
34
170
A
90_
ø (X6)4.5
17.2
Fig. 2-3 Mounting dimensions for the machine control panel (MCP)
19
9 152.2 159.8
8 154
2-18
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
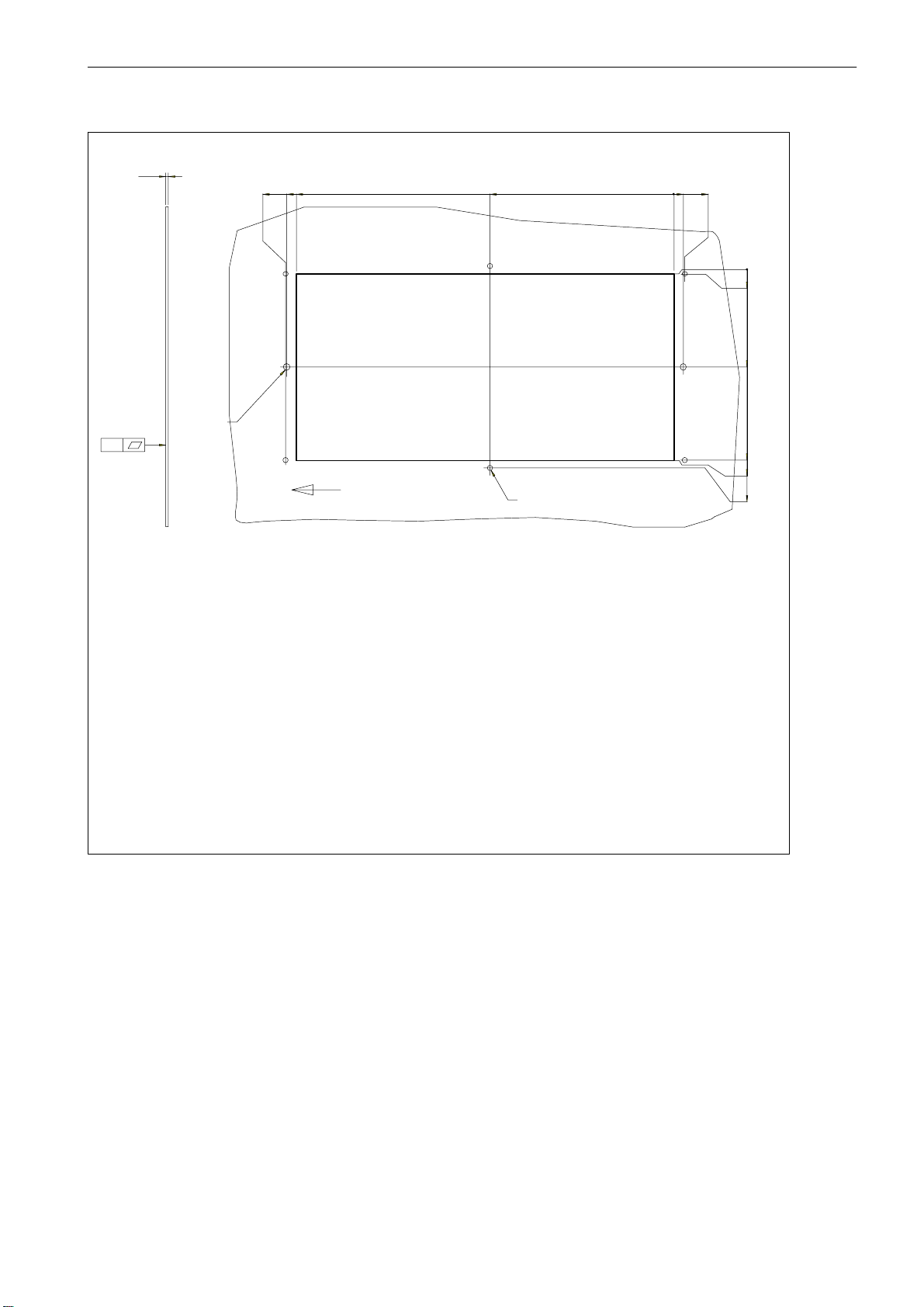
Page 19
Installing the Control System
2.1 Installing and removing the SINUMERIK 802D
>= 2
147
140
6xM4 1)
0
7
301
290
141.2
Fig. 2-4 Drilling pattern for the machine control panel (MCP)
0
11
1) M4 rivet−down, insert nut or M4 extruded hole
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
2-19
Page 20
Installing the Control System
2.1 Installing and removing the SINUMERIK 802D
86.1
172.2
0
7.7
24
1)
330
320
Ground screw M5
10
Connection socket
0
2)
Note:
1) This dimension should be added to the height of the connector (15mm),
that is (24+15)=39 mm.
2) Location pins (2xø4.7)
20 290 20
172.2
165
158.8
13.4
7.2
0
330
321
161.2
9
15 142.2 15
0
Fig. 2-5 Mounting dimensions for the keyboard (vertical layout for installation alongside the PCU)
2)
2-20
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 21
Installing the Control System
2.1 Installing and removing the SINUMERIK 802D
0.5
2
+3
2)
ø5(2x)
303.5
302.5
295
Up
3)
143.7
M4(6x)
1)
7.5
0
8.5
0
0.3
73
145.7
146
151.9
Fig. 2-6 Drilling pattern for the keyboard (vertical layout for installation alongside the PCU)
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
1) M4 rivet−down, insert nut or M4 extruded hole
2) Drill holes for fixing the position ø5 mm (2x)
3) Observe the cut direction.
2-21
Page 22
Installing the Control System
2.1 Installing and removing the SINUMERIK 802D
7.2
302.2
309.4
175
0
7.724
87.5
0
Connection socket
2)
Ground screw M5
Note:
1) This dimension should be added to the height of the connector (15mm),
that is (24+15) 39 mm.
2) Location pins (2xø4.7)
1)
309.4
295.6
154.7
13.8
14515
0
175
169
15
2)
15 279.4 15
0
6
Fig. 2-7 Mounting dimensions for the keyboard (horizontal layout for installation beneath the PCU)
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
2-22
6FC5 697−2AA00−1BP5
Page 23
Installing the Control System
2.1 Installing and removing the SINUMERIK 802D
0.5
+3
2
2)
1)
M4(6x)
ø5(2x)
290
285
283.4
142.5
1.6
0
00
5
0
5
158
153
76.5
000
Fig. 2-8 Drilling pattern for the keyboard (horizontal layout for installation beneath the PCU)
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Location holes ø5 mm
2) Drill holes for fixing the position (2x)
1) M4 rivet−down, insert nut or M4 extruded hole (6x)
2-23
Page 24
Installing the Control System
2.1 Installing and removing the SINUMERIK 802D
194
325
10.5
306
6.5
10
35
10170
Fig. 2-9 Mounting dimensions for the PP 72/48
2-24
35
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 25
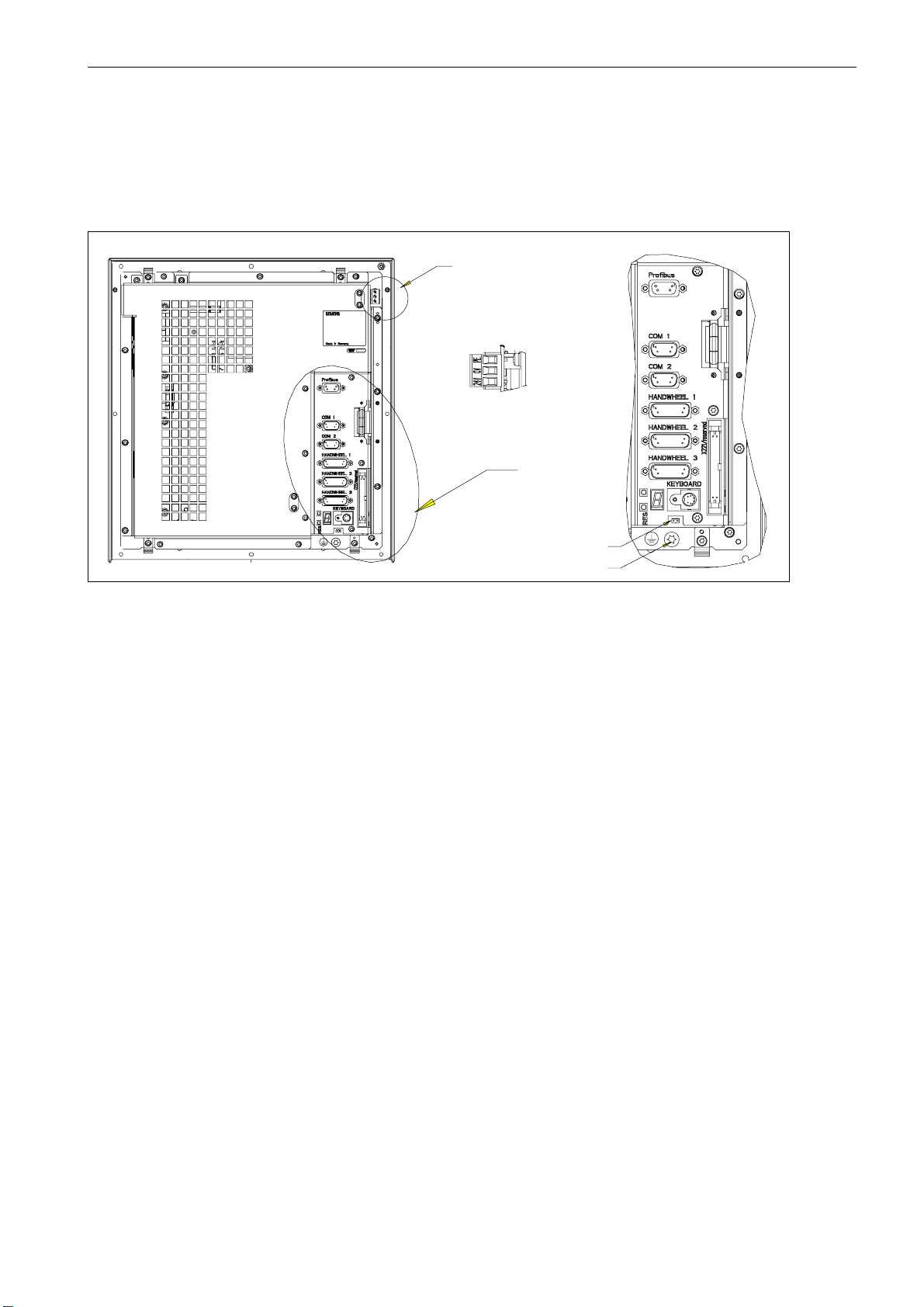
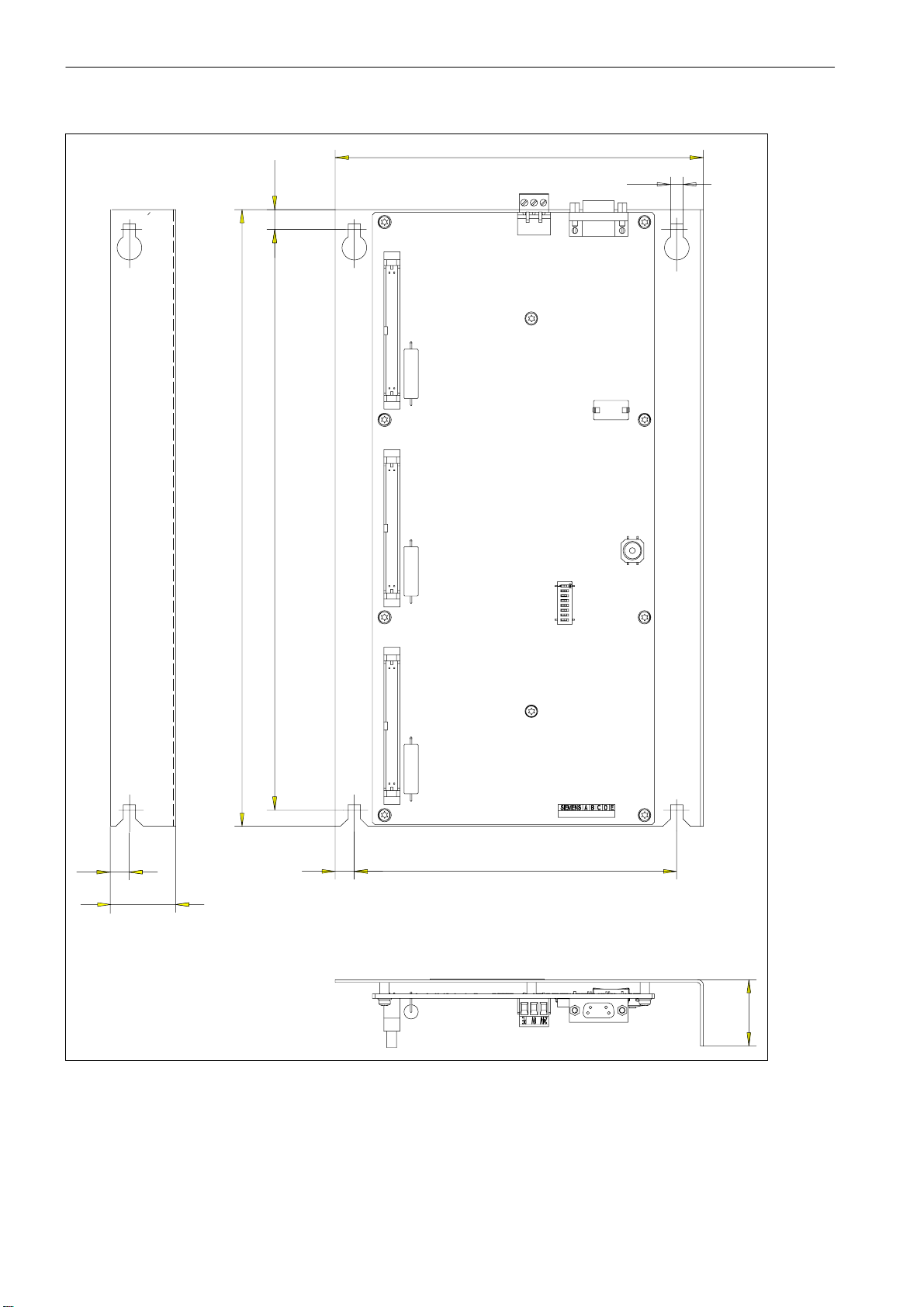
2.2 Interfaces and lines
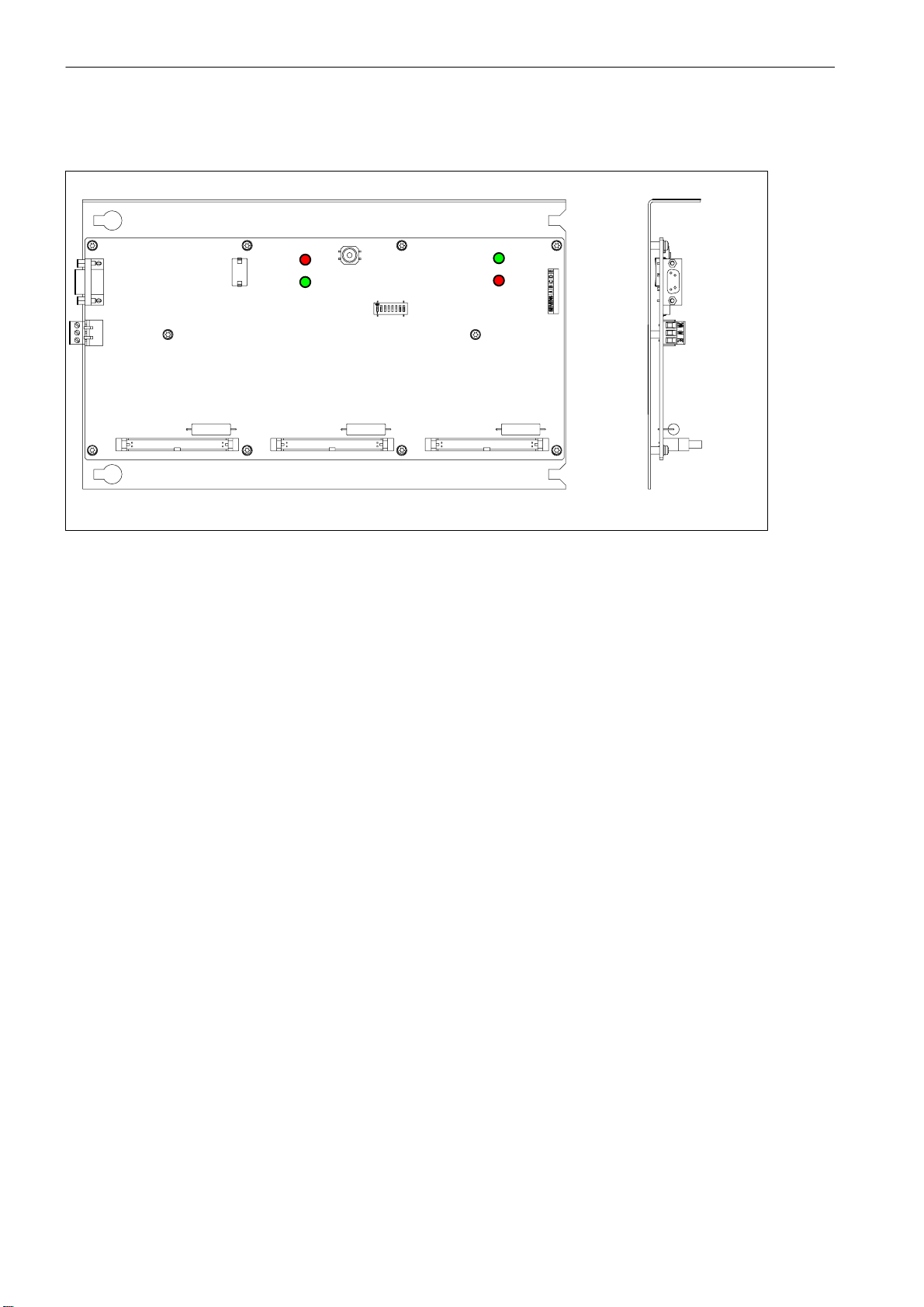
Position of the interfaces, operator controls and displays on the PCU
Installing the Control System
2.2 Interfaces and lines
Fig. 2-10 User interface on the PCU
S 24V DC Power supply connection (X8)
3−pin screw terminal connection for connecting the 24 V load power supply
S Profibus (X4)
B
B (side view)
24V DC
A
M5ground terminal
M5ground terminal
A
Jumper
9−pin D-Sub socket connector for connecting Profibus
S COM1 RS232 interface (X6)
9−pin D-Sub connector
The COM2 port does not have any function.
S Handweels 1 to 3 (X14/X15/X16)
15−pin D-Sub connector for connecting the handwheels
S Keyboard Keyboard connection (X10)
6−pin mini−DIN
S Reset button
S Jumper X311
S 4 LEDs for error and status displays (behind the front hatch)
Interface on the keyboard
S Keyboard connection
6−pin mini−DIN
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
2-25
Page 26
Installing the Control System
2.2 Interfaces and lines
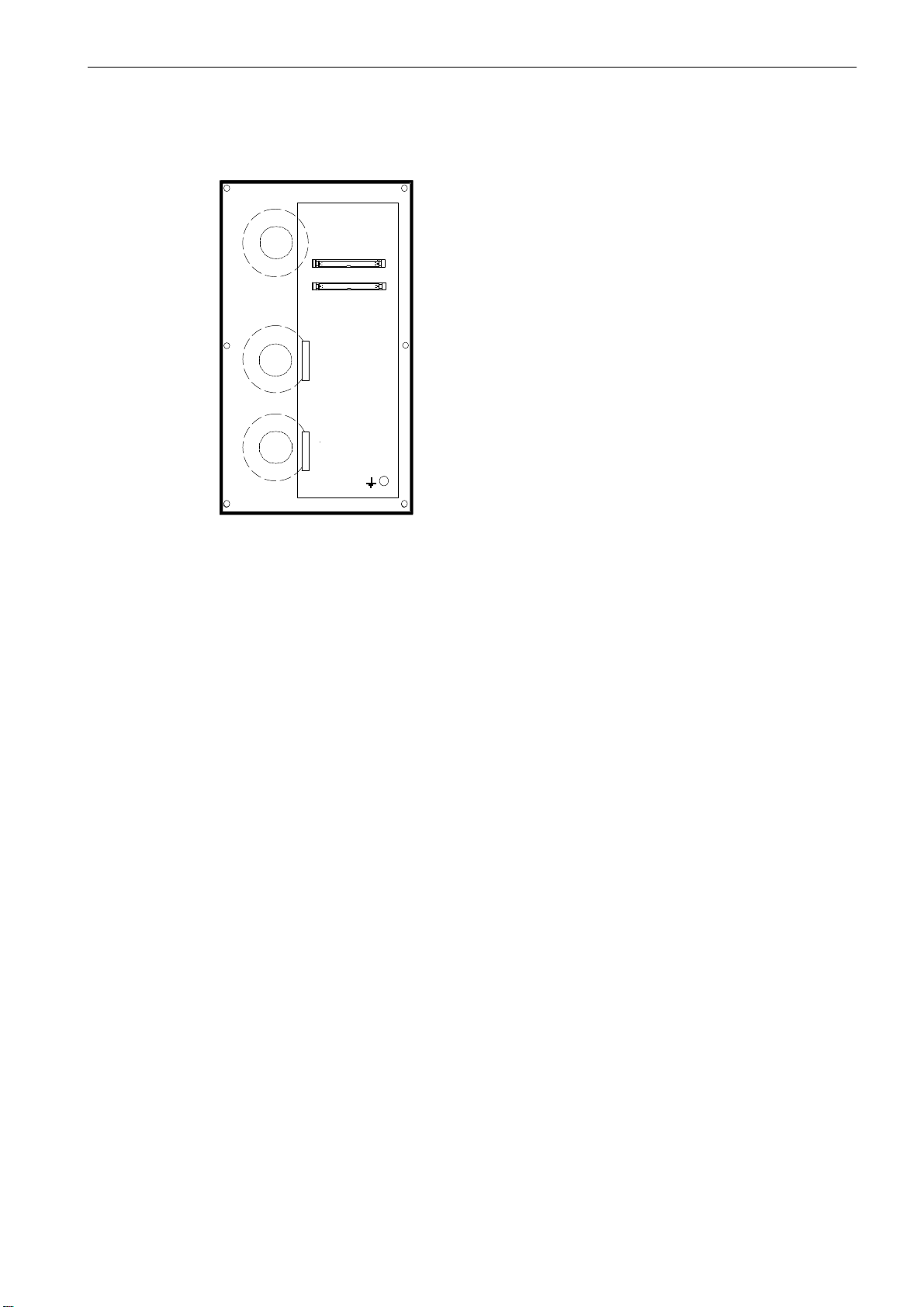
Position of the interfaces, displays and operator controls on the PP 72/48
OVERTEMP
POWER
X2
X1
X333 X222
Fig. 2-11 User interfaces on the PP 72/48
S X1 Power supply connection (24 V DC)
3−pin screw terminal connection for connecting the 24 V load power supply
S X2 Profibus
9−pin D-Sub socket connector for connecting Profibus
RESET
EXCHANGE
READY
S1
X111
X2
X1
S X111, X222 and X333
50−pin ribbon−cable connector for connecting the digital inputs/outputs
S 4 LEDs on the PP 72/48 for status displays
S S1 DIL switches for setting the PROFIBUS address (see Section 3.6)
2-26
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 27
Interfaces on the MCP
Installing the Control System
2.2 Interfaces and lines
X1202
X1201
Fig. 2-12 User interfaces on the MCP
S X1201 and X1202
50−pin ribbon−cable connector for connection to PP 72/48
Interconnecting cables
The individual components are connected as shown in the Connection Diagram in Fig. 2-13.
For the cable designations and connector types, please refer to the SINUMERIK 802D Catalog.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
2-27
Page 28

Installing the Control System
2.2 Interfaces and lines
Power supply
24 V DC
PCU
X8
Profibus (X4)
COM 1 (X6)
Handwheel1 (X14)
Handwheel 2 (X15)
Handwheel 3 (X16)
Keyboard (X10)
PROCESS FIELD BUS
RS232
Handwheels
KB
CNC keyboard
PP 72/48
X111
X1
X2
X1
X2
SIMODRIVE 611U
Fig. 2-13 Connection Diagram of the SINUMERIK 802D
X222
X333
X111
X222
X333
X423
X1201X1202
Machine I/Os
MCP
2-28
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 29
2.3 Connecting the individual components
PinSi
l
t
Si
l
t
2.3 Connecting the individual components
Note
Always use shielded lines only; make sure that the shield is connected to the metallic or
metalized connector housing on the side of the control system.
1. Connect the lines to the components as shown in Fig. 2-13.
2. Lock the D-Sub connector using the fastening screws and install the strain reliefs.
The cable sets offered as accessories provide maximum interference immunity.
2.3.1 Connecting the keyboard
To connect the keyboard to the PCU, use the supplied cable. Insert the angular connector
into the keyboard.
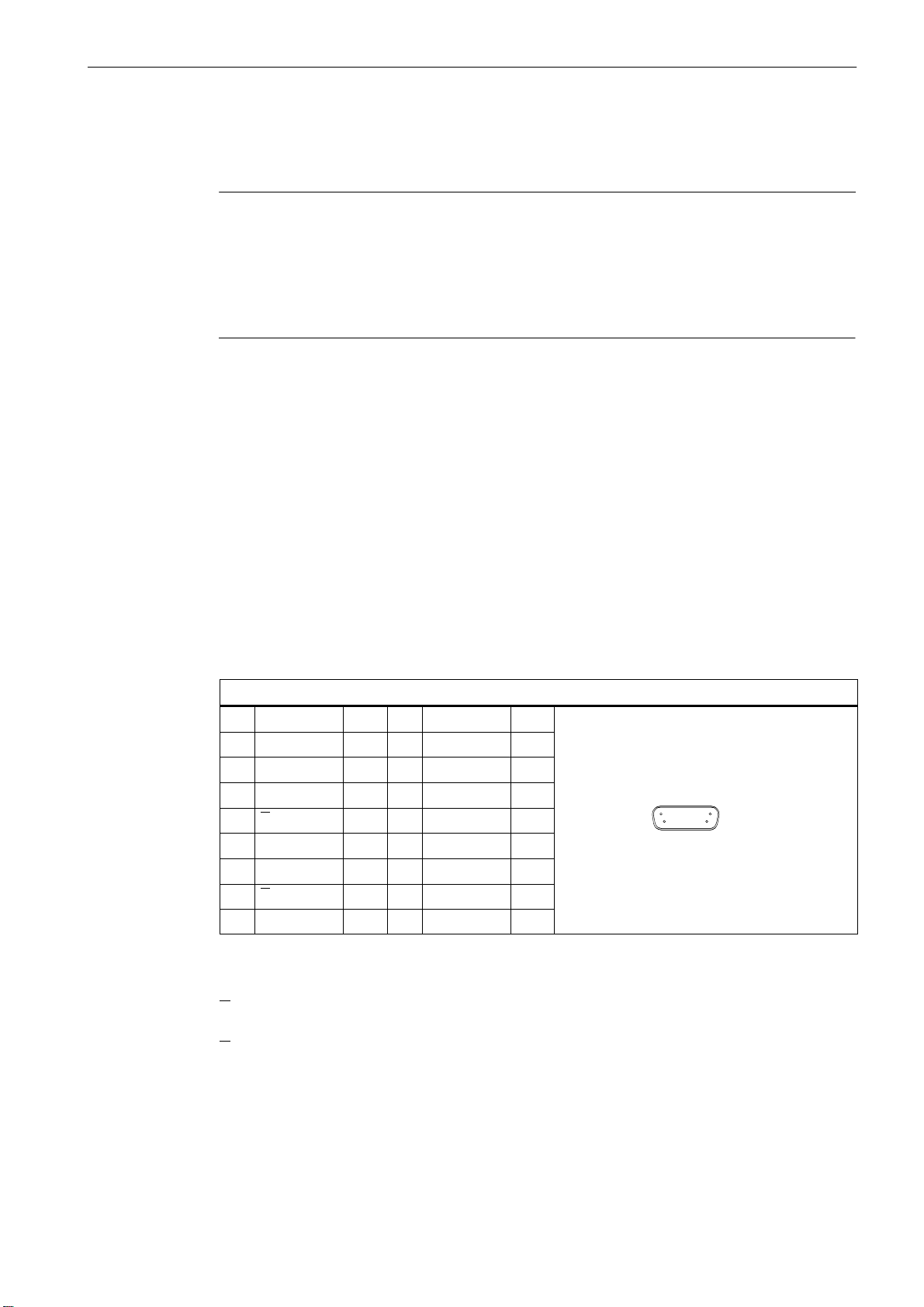
2.3.2 Connecting handwheels to the PCU
Installing the Control System
Connector designation: HANDWHEEL1 (X14)
HANDWHEEL2 (X15)
HANDWHEEL3 (X16)
Connector type: 15−pin D−Sub socket connector
Max. cable length 3 m
Table 2-1 Pin assignment of the socket connectors X14, X15, X16
X14, X15, X16
gna
1 1P5 V 9 1P5 V
2 1 M V 10 N.C.
3 A 11 1 M V
4 A 12 N.C.
5 N.C. 13 N.C.
6 B 14 N.C.
7 B 15 N.C.
8 N.C.
yp.Pin
gna
yp.
Signal names
A A pulse
A
Inverted A pulse
B B pulse
B
Inverted B pulse
1P5 5V power supply
1M Ground
8
1
915
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
2-29
Page 30
Installing the Control System
2.3 Connecting the individual components
Signal type
V Voltage output
Handwheels
Three electronic handwheels can be connected; these must meet the following
requirements:
Transmission technique: 5 V square wave signals (TTL level or RS422)
Signals: Track A as true and negated signal (U
Track B as true and negated signal (U
, Ua1)
a1
, Ua2)
a2
Max. output frequency: 500 kHz
Phase shift
of the A tracks to B: 90° "30°
Power supply: 5 V, max. 250 mA
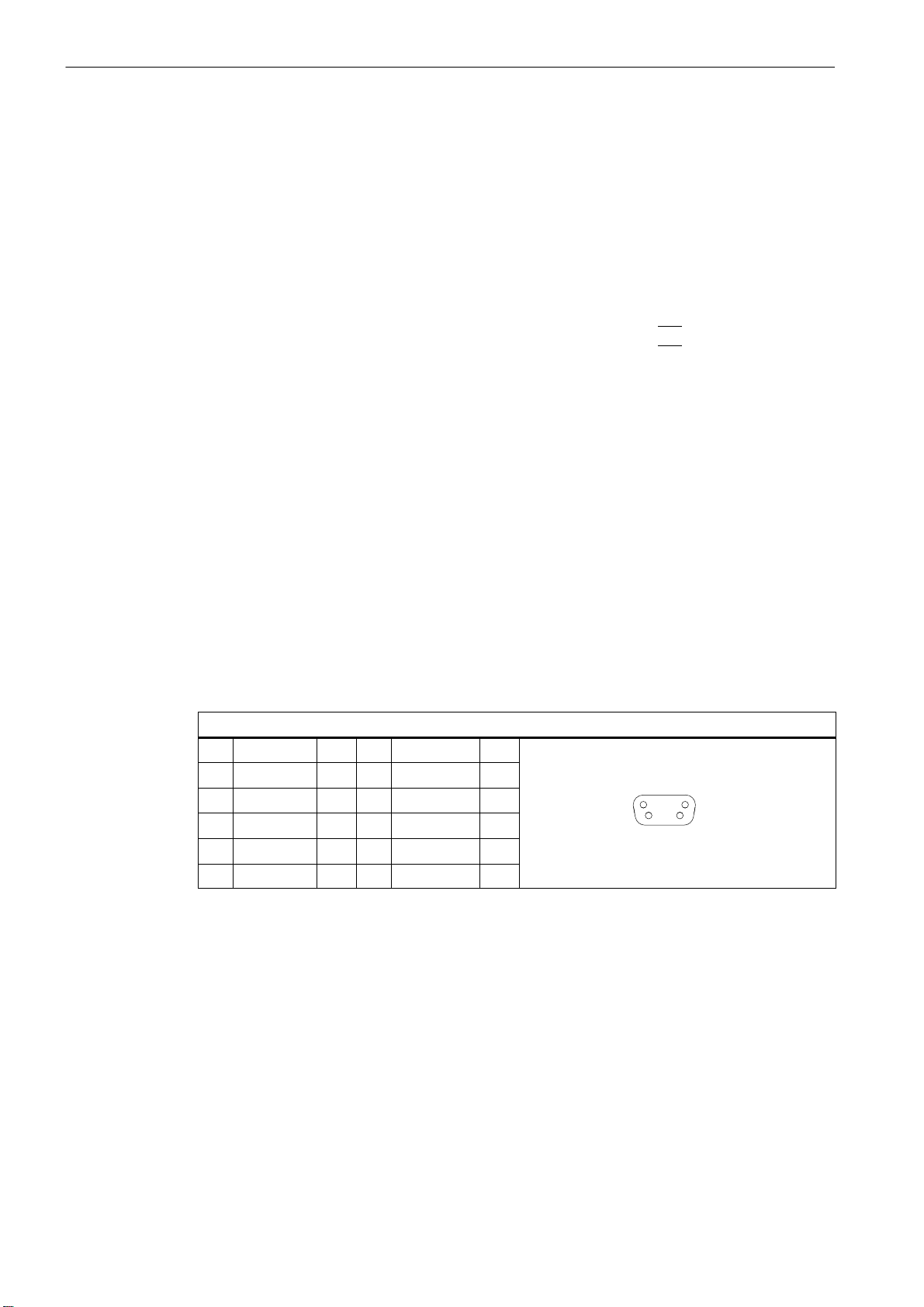
2.3.3 Terminal configuration of the RS232 interface (COM1) on the PCU
RS232 interface COM1
Connector designation: COM1 (X6)
Connector type: 9−pin D−Sub plug connector
Max. cable length 15 m
Table 2-2 Pin assignment of the COM1 socket connector (X6)
COM1 (X6)
Pin Name typ. Pin Name typ.
1 DCD I 6 DSR I
2 RXD I 7 RTS O
3 TXD O 8 CTS I
4 DTR O 9 RI I
5 1 M V
15
69
2-30
Signal description:
DCD Data Carrier Detect
RxD Receive Data V24
TxD Transmit Data V24
RTS Request To Send
CTS Clear To Send
DTR Data Terminal Ready
DSR Data Send Ready
RI Ring Indicator
1M Signal Ground
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 31

Signal type
I Input
O Output
V Voltage output
Cable assignment for the RS232 interface
Fig. 2-14 Cable assignment: Pin assignment of the D−Sub female connectors
Installing the Control System
2.3 Connecting the individual components
2.3.4 Connecting the I/Os to PP 72/48
To connect the machine control panel to the PP 72/48 (X111, X222), use ribbon cable
(see Fig. 2-13).
Max. cable length: 15 m
Pin assignment of the connectors on the PP 72/48 side
Connector designation: X111, X222, X333
Connector type: 50−pin plug connector
Table 2-3 Pin assignment of the connectors X111, X222, X333
Pin Signal Type Pin Signal Type
1 M GND 2 +24 V Output
3 I m+0.0 Input 4 I m+0.1 Input
5 I m+0.2 Input 6 I m+0.3 Input
7 I m+0.4 Input 8 I m+0.5 Input
9 I m+0.6 Input 10 I m+0.7 Input
11 I m+1.0 Input 12 I m+1.1 Input
13 I m+1.2 Input 14 I m+1.3 Input
15 I m+1.4 Input 16 I m+1.5 Input
17 I m+1.6 Input 18 I m+1.7 Input
19 I m+2.0 Input 20 I m+2.1 Input
21 I m+2.2 Input 22 I m+2.3 Input
23 I m+2.4 Input 24 I m+2.5 Input
(output for I m+0.0 ... I m+2.7)
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
2-31
Page 32

Installing the Control System
Input Byte
2.3 Connecting the individual components
Table 2-3 Pin assignment of the connectors X111, X222, X333, cont’d
Pin TypeSignalPinTypeSignal
25 I m+2.6 Input 26 I m+2.7 Input
27 not connected 28 not connected
29 not connected 30 not connected
31 O n+0.0 Output 32 O n+0.1 Output
33 O n+0.2 Output 34 O n+0.3 Output
35 O n+0.4 Output 36 O n+0.5 Output
37 O n+0.6 Output 38 O n+0.7 Output
39 O n+1.0 Output 40 O n+1.1 Output
41 O n+1.2 Output 42 O n+1.3 Output
43 O n+1.4 Output 44 O n+1.5 Output
45 O n+1.6 Output 46 O n+1.7 Output
47 DO-
COM1
49 DO-
COM1
VCC
(input for O n+0.0 ... O n+1.7 supply)
VCC
(input for O n+0.0 ... O n+1.7 supply)
48 DO-
COM1
50 DO-
COM1
VCC
(input for O n+0.0 ... O n+1.7 supply)
VCC
(input for O n+0.0 ... O n+1.7 supply)
Danger
!
The 24V power supply for digital outputs (DOCOM1) must be designed as a functional extra−low voltage with safe isolation to EN 60204-1.
Note
The 24V voltage for the digital outputs must be connected to all 4 pins 47, 48, 49, 50. Make
sure that the interconnecting cable between the power supply and the supply voltage inputs
pins 47 - 50 does not exceed a permissible length of max. 10 m.
The connectors X111, X222 and X333 have the same assignment, but the I/O areas are offset by 3 bytes (inputs) or 2 bytes (outputs) (cf. Table 2-4).
Table 2-4
PP 72/48 1
Profibus address 9
X111 X222 X333 X111 X222 X333
IB 0 3 6 9 12 15
Input Byte
OB 0 2 4 6 8 10
Output Byte
M 0 3 6 9 12 15
n 0 2 4 6 8 10
1 4 7 10 13 16
2 5 8 11 14 17
1 3 5 7 9 11
PP 72/48 2
Profibus address 8
2-32
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 33

2.4 Connecting the SIMODRIVE 611U drive unit
2.3.5 Connecting the ADI4 module
For the relevant data for connecting the ADI4 module, please refer to the documentation
”ADI4 − Analog Drive Interface for 4 Axes”, Product Manual.
For the configuration, please observe the specifications on the Toolbox.
Note
Make sure that your ADI4 module has firmware release 01.02.02.
2.4 Connecting the SIMODRIVE 611U drive unit
For the relevant information regarding the configuration of the interfaces and for connecting
the components of the drive unit, please refer to the Documentation ”SIMODRIVE 611UE”.
Installing the Control System
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
2-33
Page 34

Installing the Control System
15
2.5 Connecting the Profibus
2.5 Connecting the Profibus
All stations are connected to each other via Profibus. Master is the PCU, and slaves are the
SIMODRIVE 611 UE and the PP 72/48.
The baud rate of the clock−synchronous Profibus is fixed to 12 Mbaud and cannot be
changed. Converters for optical fiber cable (OLMs, OLPs) or repeaters are not permitted.
Profibusinterface
Socket type: 9−pin D−Sub socket connector
Max. cable length: 100 m at 12 Mbaud
Table 2-5 Female connector pin assignment
Pin
Signal
Meaning
Pin Signal
1 Shield 6 VP
2 Reserved 7 Reserved
3 RxD/TxD−P
4 CNTR−P
5 DGND
Receive/send data −
plus, B line (red)
Control signal for the
repeater (direction
control)
Data transfer potential
(ground to 5V)
8 RxD/TxD−N
9 CNTR−N
Meaning
Supply voltage for the
terminators − P, (P5V)
Receive/send data −
minus, A line (green)
Repeater control signal (direction control)
15
9
6
Note
Use the recommended Profibus connectors only. They are designed such that the ongoing P
branch is disconnected when the terminator is connected.
The PB master = PCU should be connected at the start of the PB line.
Make sure that the terminating resistors are only connected at the first and at the last sta-
tions.
Line A green Line B red
2-34
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 35

Installing the Control System
2.5 Connecting the Profibus
ON
A1/B1
PCU
A1/B1
A2/B2
PP 72/48
Fig. 2-15 General design of a Profibus line
OFF
OFF
A1/B1
A2/B2
ON
A1/B1
611 UE 611 UE
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
2-35
Page 36

Installing the Control System
2.6 Grounding
2.6 Grounding
Ground connections
The following ground connections must be provided:
S PCU
S Machine control panel (MCP)
S Keyboard (KB)
When establishing the ground connections for PCU, MCP and KB, connect the grounding
points to the grounding rail (Fig. 2-16).
Grounding the PP 72/48
Install the PP 72/48 in accordance with EN 60204. If a large−area, permanent metallic connection to the central grounding point is not possible via the backplane, connect the mounting plate to the grounding rail using a line >10 mm
2
.
Grounding rail
MCP
to the chassis
PCU
Fig. 2-16 Grounding diagram for installing PCU and MCP
2-36
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 37

2.7 Power supply of PCU (X8) and PP 72/48 (X1)
2.7 Power supply of PCU (X8) and PP 72/48 (X1)
Screw−terminal block
Connect the 24 V DC load power supply required for the power supply to the screw terminal
block X8 or X1.
Features of the load power distribution
Danger
!
The 24 V DC must be generated as a functional extra−low voltage with safe electrical
isolation (to IEC 204-1, Section 6.4, PELV) and be grounded by the user (make a
connection from the PELV signal M to the central grounding point of the system).
Table 2-6 Electrical parameters of the load power supply
Installing the Control System
Parameter
Voltage range mean value 20.4 28.8 V
Ripple 3.6 Vss
Non−periodic overvoltage 35 V
Rated current consumption 1 A
Starting current 2.6 A
Table 2-7 Pin assignment of the screw terminal block X8/X1
Terminal
1 P24 24 V DC
2 M Ground (GND)
3 PE
Signal Description
min. max. Unit Conditions
Duration:
500 ms
50 s recovery
time
Note
Make sure that the interconnecting cable between the power supply and the supply voltage
connection (screw−terminal block X1) does not exceed a permissible length of max. 10 m.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
2-37
Page 38

Installing the Control System
2.8 Displays on the PCU
2.8 Displays on the PCU
Fours LEDs are installed on the front side of the PCU.
Fig. 2-17 Displays on the PCU alongside the PC card slot
ON (green) Power On
NC (yellow) Sign−of−life of the NC (flashing)
WD (red) Process monitoring
PB (yellow) Profibus
2-38
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 39

2.9 Displays on the PP 72/48
The status display is realized via 4 LEDs.
POWER (green) Power On
READY (red) PP 72/48 is ready; no cyclic data exchange
EXCHANGE (green) PP 72/48 is ready; cyclic data exchange is performed
OVTEMP (red) Overtemperature display
Installing the Control System
2.9 Displays on the PP 72/48
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
2-39
Page 40

Installing the Control System
2.9 Displays on the PP 72/48
This sheet has been left empty for your notes.
2-40
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 41

Commissioning
3.1 General
Start−up prerequisites
S You will need the following:
− SINUMERIK 802D User Documentation
− SINUMERIK 802D Description of Functions
− A PC for commissioning and data backup
− Tools installed from the Toolbox CD:
WinPCIN
PLC802 Programming Tool
SimoCom U
Text Manager (is installed using the ”802D Toolbox” menu item)
S The mechanical and electrical installation of the system must be completed.
S Starting up the SIMODRIVE 611 UE drive (with the Profibus option module inserted)
3
Start−up sequence
To commission the SINUMERIK 802D, proceed as follows:
1. Check that the PCU boots.
2. Set the language.
3. Set the required technology.
4. Set the general machine data.
5. Start up the PLC.
6. Set the axis/spindle−specific machine data.
7. Perform a dry run for the axes and for the spindle.
8. Optimize the drive.
9. Complete the commissioning; perform a data backup.
− Match the encoder to the axis / spindle.
− Match the setpoint to the axis / spindle.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
3-41
Page 42

Commissioning
3.1 General
3.1.1 Access levels
Protection levels
The SINUMERIK 802D provides a concept of protection levels for enabling data areas.
There are the protection levels 0 to 7 whereby 0 is the highest and 7 the lowest level.
The protection levels can be set for certain function areas (e.g. program editor) using the
display machine data (USER_CLASS...).
When the control system is delivered, certain default passwords are already set for the
protection levels 1 to 3. If necessary, the appropriate authorized person can change these
passwords.
Table 3-1 Protection level concept
Protection
level
4 to 7 No password and
Protection levels 1 ... 3
The protection levels 1 to 3 require a password. The passwords can be changed after activation. For example, if the passwords are no longer known, the control system must be reinitialized (booting with default machine data). This will reset all passwords to their defaults
according to the software release you have acquired.
The password remains set until it is reset by selecting the Delete password softkey.
POWER ON will not reset the password.
Protection levels 4 ... 7
Protection level 7 is set automatically if no password is set and no protection level interface
signal is set. The protection levels 4 to 7 can be set from the PLC user program even without a password by setting the bits in the user interface.
Locked by Area
0 Siemens, reserved
1 Password: SUNRISE (default) Expert mode
2 Password: EVENING (default) Machine manufacturer
3 Password: CUSTOMER (default) Authorized operator, setter
user interface from PLC NCK
Authorized operator, setter or appropriate graduations as desired
3-42
Note for the reader
How to set the access levels is described in the User Manual: ”Operation and Programming”.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 43

3.1.2 Structure of machine data (MD) and setting data (SD)
Number and identifier
MD and SD are addressed via their numbers or their names (identifiers). The number and
the name, as well as the activation type and the unit are displayed on the screen of the control system.
Activation
The activation stages are listed according to their priority. If any data is changed, it comes
into effect after:
S POWER ON (po) Turning off / turning on the SINUMERIK 802D
S NEW_CONF (cf)
With RESET at the PLC interface (V3000 0000.7)
S RESET (re) With RESET at the PLC interface (V3000 0000.7) or at the end of the pro-
gram M2/M30
Commissioning
3.1 General
S IMMEDIATELY (im) After input of the value
Protection level
For start−up or machine data input, usually, protection level 2 is required.
Unit/system of units
Depending on MD 10240 SCALING_SYSTEM_IS_METRIC, the physical units of the machine data (MD) differ as follows:
If there are machine data with no physical unit assigned, the relevant field remains empty.
Note
The default setting is MD 10240 SCALING_SYSTEM IS METRIC = 1 (metric).
MD 10240 = 1 MD 10240 = 0
mm inch
mm/min inch/min
2
m/s
3
m/s
mm/rev. inch/rev.
inch/s
inch/s
2
3
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
3-43
Page 44

Commissioning
3.2 Turning on and booting the control system
3.2 Turning on and booting the control system
Procedure
S Check the system visually for:
− correct mechanical design and check that all electrical connections are performed cor-
rectly.
− connected voltages
− connection of shielding and grounding.
S Connect the control system (booting in the normal mode)
Booting the control system in the normal mode
When the control system is turned on, the boot sequence is displayed on the control system
with all its individual phases. Once the start screen of the user interface has appeared, the
booting sequence is completed.
Booting the control system in the start−up mode
After Power ON and prompting via an appropriate message on the screen, press the
SELECT key.
Once the DRAM test is completed, the START UP MENU appears on the display. Use the
cursor to select an appropriate power−up/start−up mode and press INPUT to confirm.
The modes specified in the START−UP MENU have the following meanings:
S normal mode
If this option is chosen, the control system will boot with the last machine data setand the
previously loaded programs.
S default data (is only displayed if protection level 1 or 2 is set)
If this option is chosen, the control system will boot with default machine data.
S software update
In this case, the control system will not boot at all. The software can only be updated if an
NC card with a software update is provided.
S reload saved user data
If this option is chosen, the user data (machine data, programs, etc.) backed up to the
flash memory of the control system are accepted as the current data and used for power−up.
3-44
S PLC stop
Select PLC Stop while the control system is booting if PLC Stop can not be triggered via
the user interface any more.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 45

3.3 Language setting
English is set for both the foreground and background languages. You can change the languages by loading new language files from the toolbox using the Text Manager.
The functions provided by the Text Manager are described in its help file.
Sequence
S Establish a V24 connection between the PC and the PCU (COM1).
S Turn on the control system and wait until the control system has completed its booting
sequence without errors.
S In the ”System” operating area, set the password for protection level 2.
S Preselect the > BIN format from the ”RS232 settings” operating area.
S In the ”System” operating area, Data I/O > menu item, position the cursor on the line
”Start−up data PC”.
S Select the Read in softkey.
Commissioning
3.3 Language setting
S Start the Text Manager on your PC.
S Use the Text Manager to select the relevant language file for your foreground or back-
ground language and transfer it to the control system.
S Restart the NC.
S The desired language is now set.
Note
Make sure that the settings for the interface parameters of the PCU and of the PC are the
same.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
3-45
Page 46
Commissioning
3.4 Setting the technology
3.4 Setting the technology
Note
The SINUMERIK 802D is delivered with default machine data. Load the relevant setup file
from the toolbox into the control system, depending on the technology turning or milling.
The following setup files are offered to choose from:
S setup_T.cnf Turning machine with complete cycle package
S setup_M.cnf Milling machine with complete cycle pack
S setTra_T.cnf Turning machine with complete cycle package and the functions Transmit,
Tracyl, Spindle1, C axis and 2nd spindle technology ’turning’
S trafo_T.ini Machine data with the functions Transmit, Tracyl, Spindle1, C axis and
2nd spindle technology ’turning’
S trafo_M.ini Machine data for the Tracyl function − ”Milling” technology
S adi4.ini Machine data for setting up the analog setpoint output via ADI4
The setup file must be loaded during the commissioning after booting of the control system,
but prior to the general configuration.
Sequence
Note
The SINUMERIK 802D base line is supplied with default machine data. To set the turning
technology, load the following setup file from the toolbox into the control system:
S setup_T.cnf Turning machine with complete cycle package
If you wish to use the analog setpoint output in conjunction with the I/O module ADI4, reload
the following ini file:
S adi4.ini Machine data for setting up the analog setpoint output via ADI4
The setup file must be loaded during the commissioning after booting of the control system,
but prior to the general configuration.
Note
Please always observe the readme file supplied with the ”Toolbox”. It provides up−to−date
information.
S Establish an RS232 connection between the PC and the PCU (COM1).
S Turn on the control system and wait until the control system has completed its booting
sequence without errors.
3-46
S In the ”System” operating area, set the password for protection level 2.
S Set the binary format.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 47

Commissioning
3.4 Setting the technology
S In the ”System” operating area, \ Data I/O \ menu item, position the cursor on the line
”Start−up data PC”.
S Select the Read in softkey.
S Start your PC with WINPCIN.
S Select the Binary format softkey, press RS232 config and set, save and activate the
relevant COM interface of your PC/PG (Save&activate softkey, Back softkey).
S Select the Send data softkey.
S Select the setup file (from the toolbox) for turning or milling in the Siemens or ISO mode
(see Readme file in the Toolbox) and transfer it from your PC to the control system via
WINPCIN.
S The control system boots automatically during the transmission several times.
S The SINUMERIK 802D is now preset to the required technology.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
3-47
Page 48

Commissioning
3.5 Entering the machine data
3.5 Entering the machine data
Overview
The most important machine data of the individual subareas are listed here to assist you.
For a detailed description of the machine data and interface signals, please refer to the Descriptions of Functions (cf. cross−references in the tables of Chapter 7 ”Machine Data and
Setting Data”).
Note
The default values of the machine data have been chosen such that usually no change is
required.
Entering the machine data (MD)
Before you can enter the machine data, the password for protection level 2 must be set.
Use the relevant softkey to select the following machine data areas and to change the ma-
chine data if necessary:
S General machine data MD 10000 ... 19999
S Channel machine data MD 20000 ... 29999
S Axis machine data MD 30000 ... 39999
S Display machine data MD 1 ... 999
S Drive machine data Parameters 599 ... 1999
The data you have entered are written to the data memory immediately. An exception is the
drive machine data. To save the drive machine data permanently, use either the Save axis
softkey, which can be found in the area of the drive machine data with the drives turned on,
or the SimoCom U tool. If you forget to save the data, the old data is effective again after the
next drive reset. To refresh the display of the drive machine data on the screen after changing, use the Refresh softkey.
The machine data is activated depending on the machine data property ”Activated”, Section
3.1.2.
3-48
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 49

3.6 Setting the Profibus address
Certain bus configurations have already been prepared for SINUMERIK 802D. The required
configuration can be set via MD 11240: PROFIBUS_SDB_NUMBER. In all cases, the configuration constitutes the maximum configuration. It is not necessary to connect all stations.
Table 3-2
Commissioning
3.6 Setting the Profibus address
MD 11240
3 PP module 1 9 −
PP module 2 8 −
Single−axis power section 10 5
Single−axis power section 11 6
Twin−axis power section Drive A
4 PP module 1 9 −
PP module 2 8 −
Single−axis power section 10 5
Twin−axis power section Drive A
Twin−axis power section Drive A
5 PP module 1 9 −
PP module 2 8 −
Single−axis power section 20 1
Single−axis power section 21 2
Twin−axis power section Drive A
Single−axis power section 10 5
6 PP module 1 9 −
PP module 2 8 −
Single−axis power section 20 1
Single−axis power section 21 2
Single−axis power section 22 3
Single−axis power section 10 5
0 PP module 1 9 −
PP module 2 8 −
PB DP station (slave) PB address Drive number
12 1
Drive B
12 1
Drive B
13 3
Drive B
13 3
Drive B
2
2
4
4
Note
The assignment between PB address and drive number is fixed and cannot be changed.
Set now the MD 11240: PROFIBUS_SDB_NUMBER according to your particular bus configuration.
Parameterize the PB addresses of the PB stations (SIMODRIVE 611 UE and PP module) as
specified in the table above.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
3-49
Page 50

Commissioning
3.6 Setting the Profibus address
To parameterize the drive, use the SimoCom U Parameterization and Commissioning Tool.
You will need the following documentation: SIMODRIVE 611 UE Description of Functions.
Example 1:
Turning machine with one PP module, one twin−axis power section (X and Z axes) and the
spindle as the single−axis power section.
Table 3-3
Example 2:
MD 11240
3 PP module 1 9 −
Single−axis power section 10 5
Twin−axis power section Drive A
PB station (slave) PB address Drive number
Drive B
12 1
2
Milling machine with two PP modules, two single−axis power sections (X, Z axes), one twin−
axis power section (Y, C axis) and one spindle as a single−axis power section.
Table 3-4
MD 11240
5 PP module 1 9 −
PP module 2 8 −
Single−axis power section 20 1
Single−axis power section 21 2
Twin−axis power section Drive A
Single−axis power section 10 5
PB station (slave) PB address Drive number
Drive B
13 3
4
PCU
PP 72/48
3-50
Slave 12 from example 1 has been fully replaced by slaves 20 and 21.
Is master at PROFIBUS; address cannot be changed
Is slave at PROFIBUS; max. two PP modules can be connected. The addresses are set using DIL switch S1 on the PP module.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 51

Commissioning
3.7 Starting up the PLC
611 UE
PB address
9 (default setting)
(PP module 1)
8
(PP module 2)
DIL switch S1 (PP module)
1 + 4 = ON
2 + 3 + 5 + 6 + 7 + 8 = OFF
4 = ON
1 + 2 + 3 + 5 + 6 + 7 + 8 = OFF
Note
The newly set PB station address is only active after POWER ON.
Is slave at PROFIBUS; the bus address is only set during commissioning using the SimoCom U commissioning tool or directly via the display and the operator terminal.
Note for the reader
SIMODRIVE 611U Description of Functions
3.7 Starting up the PLC
After starting up the Profibus, the prepared PLC user program is ready to run and can be
used for further start−up. To load the PLC user program, use the Programming Tool.
For a description, please refer to Section 5.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
3-51
Page 52

Commissioning
3.8 Starting up the axes/spindle
3.8 Starting up the axes/spindle
3.8.1 Setpoint/actual value assignment
The axis machine data MD 30130: CTRLOUT_TYPE can be used to switch the setpoint out-
put, and MD 30240: ENC_TYPE can be used to switch the actual−value input between simulation and PROFIBUS drive.
Table 3-5
Machine data
MD 30130 Value = 0
Simulation
MD 30240 Value = 0
Simulation
Simulation Normal mode
Value = 1
In this case, the setpoint signals are
output via Profibus.
Value = 1 (INCR) or 4 (EnDat)
In this case, the actual values are
read in via Profibus.
Note
For simulation, MD 31130 and MD 30240 must be parameterized with ”0”.
To enable the relevant NC axis to assign its setpoint to the appropriate PROFIBUS drive,
ensuring that the actual values are returned from this PROFIBUS drive, it is imperative to
parameterize the machine data MD 30110: CTRLOUT_MODULE_NR and MD 30220:
ENC_MODULE_NR.
Note
With 2−axis power sections, both drives (A and B) each must be assigned to one axis.
Otherwise, an error message is issued during power−up (drive alarm 832 ”Profibus not
clock−synchronized to master), and the entire power section is not ready for operation.
3-52
A meaningful default setting for these machine data have already been implemented in the
default data record for turning and milling.
The following applies for the default data record for turning:
Axis Drive number
MD 30110
MD 30220
X1 1 12 Twin−axis: Drive A
Z1 2 12 Twin−axis: Drive B
SP 5 10 Single−axis
PROFIBUS address Power section
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 53

3.8 Starting up the axes/spindle
The following applies for the default data record for milling:
Commissioning
Axis Drive number MD
30110
MD 30220
X1 1 12 Twin−axis: Drive A
Y1 2 12 Twin−axis: Drive B
Z1 3 13 Twin−axis: Drive A
SP 5 10 Single−axis
A1 4 13 Twin−axis: Drive B
PROFIBUS address Power section
If this default setting does not match your machine configuration, the data must be adapted
accordingly.
Note
The machine data MD 31110: CTRLOUT_MODULE_NR and MD 30220:
ENC_MODULE_NR must be set such that they have the same drive number because there
is a fixed assignment between measuring system and motor.
Example:
The machine you want to start up is a milling machine. The milling machine possesses three
axes and one spindle. The X1 and the Y1 axes are controlled by a twin−axis power section,
the Z1 axis and the spindle by one single−axis power section each.
S The default data record for a milling machine (setup_m) has been loaded.
S The bus configuration has been selected with MD 11240= 3.
S Now, adapt the axis machine data MD 30110: CTRLOUT_MODULE_NR and MD 30220:
ENC_MODULE_NR will be adapted as follows (MD 30110 and MD 30240 must only be
changed for the Z1 axis).
Axis Drive number
MD 30110
MD 30220
X1 1 12 Twin−axis: Drive A
Y1 2 12 Twin−axis: Drive B
Z1 6 11 Single−axis
SP 5 10 Single−axis
PROFIBUS address Power section
S Set the PB addresses of the drives as specified in the table above (SimoCom U). Due to
the fact that the 5th axis (A1) is not used, MD 20070: AXCONF_MACHAX_USED[4]=0
must be parameterized. This will remove the axis from the configuration of the NC.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
3-53
Page 54

Commissioning
3.8 Starting up the axes/spindle
3.8.2 Default settings for the axis machine data for the feed axes
The following machine data list summarizes all default data or their recommended settings
with SIMODRIVE 611 UE PROFIBUS drives connected.611
Once they have been set, the axes are ready to traverse, and only a fine adjustment (reference point approach, software limit switches, position controller optimization, speed feedforward control, lead error compensation,...) must be performed. See: /FB/ SINUMERIK 802D
”Description of Functions”
Note
For feed axes, only parameter set 1 = index [0] is used. Index [1] ... [5] must only be parameterized when using the parameter switching function (see /FB/ Chapter 3), with G331 ”Rigid tapping” or for G33 (see /FB/ Chapter 11).
MD Name Default va-
Unit Remark
lue
31030 LEADSCREW_PITCH 10 mm Leadscrew of the ballscrew
Load gear transmission ratio
31050
31060
32000 MAX_AX_VELO 10000 mm/min Maximum axis velocity
32300 MAX_AX_ACCEL 1 m/s
34200 ENC_REFP_MODE 1 1: Incremental encoder
36200 AX_VELO_LIMIT 11500 mm/min Threshold value for velocity monitoring;
DRIVE_AX_RATIO_DENOM
DRIVE_AX_RATIO_NUMERA
1
1
Revolutions of the ballscrew
Motor revolutions
2
Maximum axis acceleration
Motor order no:
1Fx6xxx−xxxxx−xAxx
0: EnDat encoder
Motor order no:
1Fx6xxx−xxxxx−xExx
setting rule:
MD 36200 = 1.15 x MD 32000
Example:
Motor with incremental encoder
Gear transmission ratio: 1:2
Spindle lead 5 mm
Max. axis velocity 12 m/min
Max. axis acceleration 1.5 m/s
Machine data settings:
MD 31030 = 5
MD 31050 = 1
MD 31060 = 2
MD 32000 = 12000
MD 32300 = 1,5
MD 36200 = 13800
2
3-54
The axis can now be traversed. The direction of movement can be reversed using MD
32100: AX_MOTION_DIR = 1 or –1 (without influencing the control direction of the position
control).
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 55

3.8.3 Connecting a direct measuring system
Prerequisite:
Both rotary and linear measuring systems can be connected to the SINUMERIK 802D.
These measuring systems must be signal generators with 1Vss sin/cos track (A, A
You can connect either a measuring system with a zero mark (R, R
with an EnDat interface. Measuring systems with distance−coded zero marks must not be
used!
If a direct measuring system is connected, the 611UE closed−loop control module can only
be operated with one axis. The PB address with the appropriate drive number for a single−
axis power section must be selected based on Table 3-2. The direct measuring system must
be connected to the second encoder interface (X412). switching between the direct measuring system and the motor measuring system via the PLC is not possible.
Realization:
Connect a direct measuring system with Siemens standard cable
Commissioning
3.8 Starting up the axes/spindle
, B, B).
) or a measuring system
− 6FX8002−2CG00−xxxx (incremental encoder)
− 6FX8002−2CH00−xxxx (EnDat encoder)
to the encoder interface X412 of the 611UE closed−loop control module and parameterize
the drive for the direct measuring system using SimoCom U.
Special feature:
If a probe is connected when using a direct measuring system, the probe must be connected
on the SIMODRIVE 611UE to the –X454 interface, terminal I0.B and parameterized via drive
parameter P672 with signal number 80.
Fig. 3-1 Settings for P672
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
3-55
Page 56

Commissioning
3.8 Starting up the axes/spindle
Parameterization using the Drive Configuration Wizard in case of identical number of increments
The number of increments of the motor encoder is identical to the number of increments of
the direct rotary measuring system.
Fig. 3-2 Display
Adaptations in the Expert list
Fig. 3-3 Values to be entered in the Expert list
3-56
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 57

3.8 Starting up the axes/spindle
Change the process data parameterization from encoder 1 to encoder 2.
Fig. 3-4 Process data of encoder 1
Procedure:
S First, set P922 to zero; thereafter, save and press Reset.
S Change now P915:6, P916:6 ... P916:10.
Commissioning
Fig. 3-5 Process data of encoder 2
Adapting the machine data in the control system
Table 3-6
Machine Data
30240 ENC_TYPE[0] 1 := Incr. encoder
31020 ENC_RESOL[0] Increments for rot. encoder
34200 ENC_REFP_MODE[0] 1 := Incr. encoder
31000 ENC_IS_LINEAR[0] 0 := Rot. encoder
31010 ENC_GRID_POINT_DIST[0] Graduations on linear scale
31040 ENC_IS_DIRECT[0] 0 := Encoder mounted directly on
Designation Remark
4 := EnDat
0 := EnDat
1 := Linear scale
the motor
1 := Encoder mounted on the load
32110 ENC_FEEDBACK_POL[0] 1 := default
13070 DRIVE_FUNKTION_MASK[X] 8000 (only applies with SW >2.1)
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
−1:= Reverse direction of rotation
[X] ...drive number −1
3-57
Page 58

Commissioning
3.8 Starting up the axes/spindle
Parameterization using the Drive Configuration Wizard with different number of increments
With software version 2.1 and higher, the number of increments of the motor encoder and of
the direct measuring system can be different when connecting an external rotary measuring
system.
Prerequisite:
NC SW 2.1, 611U SW 05.02.04
Only possible when using a single−axis power section with PB address 20 or 10
Parameterization using the Drive Configuration Wizard
Fig. 3-6 Display
Message frame selection via PROFIBUS parameterization
Fig. 3-7
3-58
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 59

Subsequently, save and press Reset.
Adapting the machine data in the control system
Table 3-7
Commissioning
3.8 Starting up the axes/spindle
Machine Data
13060 DRIVE_TELEGRAM_TYP[X]
[X=drive number −1]
30230 ENC_INPUT[0] 2: Encoder 2 actual value (X412)
31020 ENC_RESOL[0] Number of increments for rot.
31040 ENC_IS_DIRECT[0] 0:= Encoder 2 is mounted directly
32110 ENC_FEEDBACK_POL[0] 1:= default
34200 ENC_REF_MODE[0] 1:= Incr. encoder
13070 DRIVE_FUNKTION_MASK[X] 8000 (only applies with SW >2.1)
Designation Remark
103: n_set interface with encoder
1 and encoder 2
encoder
on the motor
1 := Encoder 2 is mounted on the
load
−1:= Reverse direction of rotation
0:= EnDat
[X] ...drive number −1
3.8.4 Default settings for the axis machine data for the spindle
With SINUMERIK 802D, the spindle is a subfunction of the entire axis functionality. The machine data of the spindle are therefore to be found amongst the axis machine data
(MD 35xxx).
A description of the basic setting for the spindle can be found in Chapter 4.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
3-59
Page 60
Commissioning
3.9 Completing the start−up
3.9 Completing the start−up
After the start−up by the machine manufacturer has been completed, it is recommended to
carry out a data backup prior to delivery to the end customer:
1. Performing an internal data backup (at least protection level 3 required):
− Select the Save data softkey.
2. Resetting the access level:
− Select the Delete passw. softkey.
3.10 Service display for the axis drive behavior
Servo Trace
For axis service, the Servo trace function has been implemented in the ”Diagnostic” menu
to represent axis signals graphically.
The trace function is selected in the operating area System\Service display\Servo Trace.
Note for the reader
/BH/ SINUMERIK 802D ”Operation and Programming”, Chapter 7
3-60
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 61

Starting up the Spindle
With SINUMERIK 802D, the spindle is a subfunction of the entire axis functionality. The
machine data of the spindle are therefore to be found amongst the axis machine data
(MD 35xxx).
For this reason, data must also be entered for a spindle; this data has already been described in conjunction with the start−up of feed axes.
The following variants are offered for the spindle drive:
S Digital spindle drive with spindle actual−value encoder integrated into the motor
S Digital spindle drive with directly mounted spindle actual−value encoder
S Digital spindle drive with spindle actual−value encoder integrated into the motor, gearbox
and external zero mark (BERO)
S Digital spindle drive without encoder and without external spindle actual−value encoder
S Digital spindle drive without encoder and with external TTL encoder
S Analog spindle (via 611 U(E)) with spindle actual−value encodermounted directly on the
motor
Note
4
For spindles without gear stage switching, only gear stage 1 = index [1] will be used.
Index [2] ... [5] must only be parameterized when using the gear stage switching function
(see /FB/ Chapter 5).
Table 4-1
MD
30200 NUM_ENCS 1 0: Dig. spindle without speed actual−va-
31050
31060
35100 SPIND_VELO_LIMIT 10000 r.p.m. Maximum spindle speed
35130 GEAR_STEP_MAX_VELO_LI-
DRIVE_AX_RATIO_DENOM[1]
DRIVE_AX_RATIO_NU-
MERA[1]
MIT[1]
Name Default va-
lue
1
1
500 r.p.m. Max. speed in gear stage 1
Unit Remark
lue encoder (AM mode = operation without encoder)
1: Dig. spindle with speed actual−value
encoder integrated into the motor (1PH7
motor)
Load gear transmission ratio
Load revolutions
Motor revolutions
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
4-61
Page 62
Starting up the Spindle
35200
36200 AX_VELO_LIMIT[1] 11000 r.p.m. Threshold value for velocity monitoring;
GEAR_STEP_SPEEDCTRL_A
CCEL[1]
30 rev./s
2
Acceleration in the speed controlled
mode
setting rule: MD 36200 = 1.1 x MD
35100
4-62
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 63

Starting up the Spindle
4.1 Digital spindle drive with spindle actual−value encoder integrated into the motor
4.1 Digital spindle drive with spindle actual−value encoder integrated
into the motor
For a digital spindle drive (PROFIBUS) with spindle actual−value encoder integrated into the
motor, the machine data parameterized in Table 4-1 must be parameterized.
Example
Motor with incremental encoder
Gear transmission ratio: 1:2
Max. spindle speed 9,000 r.p.m.
Max. spindle acceleration 60 rev./s
Machine data settings:
MD 31050 = 1
MD 31060 = 2
MD 35100 = 9000
MD 35130 = 9000
MD 35200 = 60
MD 36200 = 9900
2
For the spindle, it can be necessary to adapt the following additional machine data.
Table 4-2 Additional machine data
MD
Name Default va-
lue
34000 REFP_CAM_IS_ACTIVE 1 0: without reference point cam
34060 REFP_MAX_MARKER_DIST 20 degrees 720_ = two spindle revolutions
34110 REFP_CYCLE_NR 1 ... 5 0: The spindle is not involved in chan-
35300 SPIND_POSCTRL_VELO 500 r.p.m.
36000 STOP_LIMIT_COARSE 0.04 degrees 0.4
36010 STOP_LIMIT_FINE 0.01 degrees 0.1
36030 STANDSTILL_POS_TOL 0.2 degrees 1
36060 STANDSTILL_VELO_TOL 0.0139 r.p.m. 1 (interface signal ”Axis/spindle stop-
36400 CONTOUR_TOL 1 degrees 3
Unit Recommendation/remark
nel−specific referencing.
ped” V390x 0001.4)
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
4-63
Page 64

Starting up the Spindle
4.2 Digital spindle drive with spindle actual−value encoder (TTL) mounted directly on the motor
4.2 Digital spindle drive with spindle actual−value encoder (TTL) mounted directly on the motor
Procedure
S Parameterize the spindle as specified in Table 4-1.
S Connect the TTL encoder to −X472 on the SIMODRIVE 611 UE closed−loop control
module for the spindle.
S Change the message frame type of the spindle to type 104 −>
MD 13060: DRIVE_TELEGRAM_TYPE[4]=104.
S Switch the encoder input of the spindle to the second encoder −>
MD 30230: ENC_INPUT_NR=2.
S Adapt the number of increments of the spindle encoder −>
MD 31020: ENC_RESOL = xxxx.
S Parameterize the resolver gearbox:
MD 31070: DRIVE_RATIO_DENOM (encoder revolutions)
Example
MD 31080: DRIVE_ENC_RATIO_NUMERA (load revolutions)
MD 31040: ENC_IS_DIRECT 0: The spindle encoder is mounted on the
motor side.
1: The spindle encoder is mounted on the
load side.
S In some cases, the actual value of the position encoder must be inverted (depending on
the mounting direction) −> MD 32110: ENC_FEEDBACK_POL = −1.
S Set the drive parameters (SimoCom U).
P890 − activate the angular encoder/encoder interface= 4
P922 − select the message frame PROFIBUS = 104
Save + PowerOn
Spindle with incremental encoder mounted on the chuck
TTL encoder with 2,500 pulses/revolution
Resolver gearbox transmission ratio: 1:3
Encoder
Machine data settings:
MD 13060[4] = 104
MD 30230 = 2
MD 31020 = 2500
MD 31040 = 1
MD 31070 = 3
MD 31080 = 1
MD 32110 = 1
P890 = 4
P922 = 104
Motor
4-64
Note
If a resolver gearbox with a transmission ratio other than 1:1 is installed, positioning of the
spindle can only be realized using a BERO.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 65

Starting up the Spindle
4.3 Digital spindle drive with the encoder integrated into the motor, gearbox and external zero mark via BERO
4.3 Digital spindle drive with the encoder integrated into the motor,
gearbox and external zero mark via BERO
Prerequisites
An inductive proximity switch, type Siemens 3RG4050−0AG05, is used.
With the approximation, a positive +24V edge is switched.
Parameterization
Fig. 4-1
611 UE (firmware release ≥ 03.01.06): Parameter P660 = 79
611 UE (firmware release ≥ 03.01.06): Parameter P879.13 = 1
Thus, instead of the internal zero mark, the BERO signal connected to terminal I0.A is evaluated.
802D: MD 34200: ENC_REFP_MODE = 7
Thus, a synchronization is only performed if a speed has been defined (MD 34040) using the
BERO signal. This is imperative, as a BERO always has certain signal runtimes. This is the
only way to guarantee that the synchronization is always performed to the same position.
802D: MD 34040: REFP_VELO_SEARCH_MARKER = 200 r.p.m.
The BERO signal is synchronized at this speed.
802D: MD 34060: If necessary, adapt REFP_MAX_MARKER_DIST accordingly.
If SPOS is triggered from the standstill, the spindle is first accelerated to the speed entered
in MD 34040, thereafter, the BERO edge is synchronized, and, finally, the spindle is positioned.
The direction of rotation depends on: MD 35350: SPIND_POSITIONING_DIR (3=CW /
4=CCW). In the CW direction of rotation, the synchronization is performed to the falling
edge, and in the CCW direction − to the rising edge.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
4-65
Page 66

Starting up the Spindle
4.3 Digital spindle drive with the encoder integrated into the motor, gearbox and external zero mark via BERO
PLC
To ensure that a resynchronization is performed when switching from the speed−controlled
mode to the positioning mode, the interface signal V380x2001.4 ”Resynchronize spindle
when positioning” must be linked with V390x0001.5 ”Position controller active”.
Fig. 4-2
Important
switching from the speed−controlled to the positioning mode must only be performed with
the spindle rotating and from a defined direction. Otherwise, the spindle is mispositioned!
Correct positioning can be guaranteed by programming ACP or ACN.
SPOS = ACP(0)
Thus, if first M4 Sxxx was programmed, the spindle will decelerate to the standstill, thereaf-
ter accelerate to the synchronization speed CW, then synchronize and position.
4-66
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 67

4.4 Digital spindle without external encoder
4.4 Digital spindle without external encoder
It is also possible to configure a motor without encoder (standard motor, non−Siemens mo-
tor) as the spindle motor. The KTY of the motor can be evaluated directly at the encoder interface X411 via pins 13 and 15.
4.4.1 Parameterization using the Drive Configuration Wizard
Starting up the Spindle
Fig. 4-3 Display
Fig. 4-4 Display
4.4.2 Parameterization using the Expert List
Table 4-3 Parameters to be entered in the Expert List
Parameters
922 PROFIBUSmessage frame selection 0 Save + Power On Reset
915:6 Process data setpoint assignment 0
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Text Value Remark
4-67
Page 68

Starting up the Spindle
4.4 Digital spindle without external encoder
Table 4-3 Parameters to be entered in the Expert List, cont’d
Parameters RemarkValueText
916:6 Process data actual value assign-
ment
0
916:7 Process data actual value assign-
ment
916:8 Process data actual value assign-
ment
916:9 Process data actual value assign-
ment
916:10 Process data actual value assign-
ment
Optional
1608 Fixed temperature 0 Save + Power On Reset
1602 Motor overtemperature warning
threshold
1607 Motor temperature shutdown limit 150
0
0
0
0 Save + Power On Reset
120
The temperature evaluation of the KTY connected to terminal X411 is activated and can be
used if P1608=0. The evaluation is provided via pins 13 and 25.
For example, if P1608=60 is set, the motor temperature is not evaluated; a temperature of
60_C is used for internal calculation.
Important
It is imperative to observe the order of the parameters listed above; in addition, ”Save +
Power On Reset” must be carried out whenever specified.
4.4.3 Adapting the machine data in the control system
Table 4-4
MD
30130 CTRLOUT_TYPE[0] 1
30240 ENC_TYPE[0] 0
If the spindle does not possess an encoder, it will not be possible to display the actual
speed. The display on the NC will therefore always remain zero.
With software versions higher than 2.01.05 or with SINUMERIK 802D−bl, the following machine data must be set for the expert password:
MD Designation Value Remark
13070 DRIVE_FUNKTION_MASK[X] 8000 [X] corresponds to the drive num-
Designation Value Remark
ber −1
4-68
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 69

Starting up the Spindle
4.5 Digital spindle without encoder with external TTL encoder
4.5 Digital spindle without encoder with external TTL encoder
It is also possible to configure a motor without encoder (standard motor, non−Siemens mo-
tor) as the spindle motor. The external TTL encoder is used to acquire the spindle speed.
This configuration should not be used for positioning. Due to the lack of speed acquisition at
the spindle motor, the spindle is always in the toque−controlled operation. This may result in
thermal problems and inaccuracies.
Merely the TTL encoder is connected to the 611UE controller module via the angular encoder interface. The KTY of the motor can be evaluated at the encoder interface X411 via
pins 13 and 25.
4.5.1 Parameterization using the Expert List
Table 4-5 Parameters to be entered in the Expert List
Parameters
890 Activating the angular encoder/enco-
der interface
922 PROFIBUSmessage frame selection 0 Save + Power On Reset
915:6 Process data setpoint assignment 50017
916:6 Process data act. value assignment 50018
916:7 Process data act. value assignment 50019
916:8 Process data act. value assignment 50019
916:9 Process data act. value assignment 50020
916:10 Process data actual value assign-
ment
1006 Encoder interface mod. code number 99 Save + Power On Reset
1005 Encoder interface mod. code number 2500 Save + Power On Reset
Optional
1608 Fixed temperature 0 Save + Power On Reset
1602 Motor overtemperature warning
threshold
1607 Motor temperature shutdown limit 150
Text Value Remark
4 Save + Power On Reset
50020 Save + Power On Reset
120
The temperature evaluation of the KTY connected to terminal X411 is activated and can be
used if P1608=0. The evaluation is provided via pins 13 and 25.
For example, if P1608=60 is set, the motor temperature is not evaluated; a temperature of
60_C is used for internal calculation.
Important
It is imperative to observe the order of the parameters listed above; in addition, ”Save +
Power On Reset” must be carried out whenever specified.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
4-69
Page 70

Starting up the Spindle
4.5 Digital spindle without encoder with external TTL encoder
4.5.2 Adapting the machine data in the control system
Table 4-6
MD
30130 CTRLOUT_TYPE[0] 1
30240 ENC_TYPE[0] 1
31020 ENC_RESOL[0] 2500
32110 ENC_FEEDBACK_POL[0] −1 1: = default
Designation Value Remark
−1:= Control direction inverted
With software versions higher than 2.01.05 or with SINUMERIK 802D−bl, the following machine data must be set for the expert password:
MD Designation Value Remark
13070 DRIVE_FUNKTION_MASK[X] 8000 [X] corresponds to drive number
”−1”.
4-70
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 71

Starting up the Spindle
4.6 Analog spindle (via 611 U(E)) with with spindle actual−value encoder mounted directly on the motor
4.6 Analog spindle (via 611 U(E)) with with spindle actual−value encoder mounted directly on the motor
The analog spindle function uses the analog output of the SIMODRIVE 611 UE closed−loop
control module as the setpoint output and die the encoder interface (−X472) as the actual−
value input for a TTL encoder. A digital feed axis is used as the transport axis for the setpoint and actual values of the analog spindle.
The servo enable for the analog spindle is output via the digital outputs, and the analog setpoint via terminal 75.A / 15 of the transport axis.
There are three modes:
1. MD 30134: IS_UNIPOLAR_OUTPUT =0 Bipolar spindle +
Digital output O0.A −> Servo enable
2. MD 30134: IS_UNIPOLAR_OUTPUT =1 Unipolar spindle 0...+10V
(enable and direction signals)
Digital output O0.A −> Servo enable
Digital output O1.A −> Direction of rotation
3. MD 30134: IS_UNIPOLAR_OUTPUT =2 Unipolar spindle 0...+10V
(CW enable, CCW enable)
Digital output O0.A −> CW enable
Digital output O1.A −> CCW enable
Important
In case of RESET, a setpoint is output at the analog output of the 611 UE closed−loop con-
trol module. It is therefore imperative to connect the servo enable for the analog spindle to
terminal O0.A of the transport axis.
Important
Transport axis can only be drive A of the spindle−axis power section with PB address 10
and drive number 5 or drive A of the twin−axis module with PB address 12 and drive number
1 (see also Table 2-3).
10V
When configuring the axes, first define the transfer axis, and then the analog spindle. Example: X, Z, SP, A
Only the X or Z axis may be configured as a transfer axis.
Example
The example below will use the first machine axis (X1) as the transport axis. X1 will be drive
A on a 611 UE closed−loop control module with PROFIBUS address 12.
In the 802D, the spindle is parameterized as the third machine axis (SP) (standard data record for turning). This spindle is an analog spindle with +/− 10V interface. The maximum
speed in 9,000 r.p.m. at 10 V in this example.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
4-71
Page 72

Starting up the Spindle
4.6 Analog spindle (via 611 U(E)) with with spindle actual−value encoder mounted directly on the motor
Only the additional machine data required for starting up an analog spindle will be dealt with
in the following. The general machine data for configuring an analog spindle are listed in the
table below.
Table 4-7 Settings for the example
Transport axis X1
(machine axis 1)
Connections required between the transport axis X1 and the analog spindle SP
Terminal 75.A to be connected to
Terminal 15 to be connected to
Terminal O0.A to be connected to
−X472 to be connected to
NC machine data
MD 13060: DRIVE_TELEGRAM_TYPE[0] = 0
([0] corresponds to drive number − 1)
MD 13070: DRIVE_FUNCTION_MASK[0] = 8000 (with the 802D,
only valid from software release higher than 2.1.5)
([0] corresponds to drive number − 1)
Drive data If necessary, adapt the monitoring data
P890 Activate angular encoder/encoder interface= 4
P922 Message frame selection PROFIBUS = 104
Save + RESET
e.g. terminal 56 (analog setpoint input)
e.g. terminal 14 (analog setpoint input)
e.g. terminal 65 (servo enable)
TTL encoder 5V
MD 30110: CTRLOUT_MODULE_NR[0,AX3]=1
(drive number of the transport axis)
MD 30120: CTRLOUT_NR[0,AX3]=2
MD 30130: CTRLOUT_TYPE[0,AX3]=1
MD 30220: ENC_MODULE_NR[0,AX3]=1
(drive number of the transport axis)
MD 30230: ENC_INPUT_NR[0,AX3]=2
MD 30240: ENC_TYPE[0,AX3]=1
MD 31020: ENC_RESOL[0,AX3]=2500
(number of increments of the TTL encoder)
MD 32110: ENC_FEEDBACK_POL[0,AX3]=−1
(if necessary, invert the actual value)
MD 32250: RATED_OUTVAL[0,AX3]=100
MD 32260: RATED_VELO[0,AX3]=9000
(adjust the analog interface)
MD 34060: REFP_MAX_MARKER_DIST[0,AX3]=360
MD 35300: SPIND_POSCTRL_VELO=50
(speed at which the position controller becomes active with SPOS)
MD 36000: STOP_LIMIT_COARSE[AX3]=10
MD 36010: STOP_LIMIT_FINE[AX3]=10
MD 36030: STANDSTILL_POS_TOL[AX3]=10
MD 36400: CONTOUR_TOL[AX3]=40
Analog spindle SP
(machine axis 3)
P915[8] Process data setpoint assignment PB = 50103
P915[9] Process data setpoint assignment PB = 50107
P922 Message frame selection PROFIBUS = 0
Save + RESET
Parameterize analog output 75.A/15 to ”DAC1 signal from
PROFIBUS PPO”
4-72
Symmetrize analog output:
MD 36720 DRIFT_VALUE=0,3891%
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 73

Starting up the Spindle
4.6 Analog spindle (via 611 U(E)) with with spindle actual−value encoder mounted directly on the motor
Table 4-7 Settings for the example, cont’d
Transport axis X1
(machine axis 1)
Parameterize digital outputs O0.A and O1.A to ”Selection via PROFIBUS”
Analog spindle SP
(machine axis 3)
Save + RESET
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
4-73
Page 74

Starting up the Spindle
ded)
4.7 Analog axis/spindle with TTL encoder via ADI4
4.7 Analog axis/spindle with TTL encoder via ADI4
Both rotary and linear 5V TTL square−wave encoders can be connected to SINUMERIK
802D. With this ADI4, up to 4 drives with analog setpoint interface can be connected.
Measuring systems that can be connected
S Incremental TTL encoder (for the number of increments, see Tables 4-9/4-10), difference
transfer using 5 V square wave signals (RS422 standard).
Configuration
With 5 analog axes, 2 ADI4 modules must be used. Depending on the encoder pulse number selected from Table 4-9 or 4-10, either SDB 1_ADI4 or SDB 2_ADI4 must be loaded.
The ADI4 modules have the Profibus addresses 15 and 16 assigned as follows:
Table 4-8 Assignment of the PB addresses
MD 11240
0 PP module 1 9 −
(1_ADI4 or 2_ADI4 are loa-
PP module 2 8 −
1st ADI4 drive 1
2nd ADI4 drive 1
PB (slave) PB address Drive number
16 1
Drive 2
Drive 3
Drive 4
15 5
Drive 2
Drive 3
Drive 4
2
3
4
6
7
8
The following tables show the fixed assignment of the axes to the TTL encoders which can
be connected.
Table 4-9 SDB: 1_ADI4
PROFIBUS address
Axis 1st axis 2nd axis 3rd axis 4th axis
Increments 2500 2500 2500 1024
PROFIBUS address 15
Axis 1st axis 2nd axis 3rd axis 4th axis
Increments 1024 18000 9000 2500
16
4-74
Table 4-10 SDB: 2_ADI4
PROFIBUS address
Axis 1st axis 2nd axis 3rd axis 4th axis
Increments 2048 2048 2048 1024
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
16
6FC5 697−2AA00−1BP5
Page 75

Table 4-10 SDB: 2_ADI4, cont’d
Starting up the Spindle
4.7 Analog axis/spindle with TTL encoder via ADI4
PROFIBUS address
Axis 1st axis 2nd axis 3rd axis 4th axis
Increments 1024 18000 9000 2048
15
Note for the reader
Toolbox, siemense.txt and ADI4_SDB.pdf
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
4-75
Page 76

Starting up the Spindle
4.8 Digital axis/spindle with direct measuring system (TTL) via ADI4
4.8 Digital axis/spindle with direct measuring system (TTL) via ADI4
Up to four direct 5V TTL square−wave encoders can be connected to SINUMERIK 802D via
max. one ADI4.
Measuring systems that can be connected
S 5V incremental TTL encoder (increments: 4x2,500 or 4x5,000), differential transfer using
5 V square−wave signals (RS422 standard).
Configuration
You can use an ADI4 module with three 611 U modules in 2 different variants. Either of the
SDBs DMS1_ADI4 or DMS2_ADI4 can be loaded.
The ADI4 module have the Profibus address 15 and is assigned as follows:
S Variant 1: SDB :DMS1_ADI4
PP module 1 PB address 9
PP module 2 PB address 8
Single−axis power section PB address 10
Twin−axis power section PB address 12
Twin−axis power section PB address 13
ADI4: 4 x 2,500 steps/rev. PB address 15
S Variant 2: SDB :DMS2_ADI4
PP module 1 PB address 9
PP module 2 PB address 8
Single−axis power section PB address 10
Twin−axis power section PB address 12
Twin−axis power section PB address 13
ADI4: 4 x 5,000 steps/rev. PB address 15
The table below shows an overview illustrating possible applications and the machine data
assignment:
Table 4-11 SDB: DMS1_ADI4
4-76
PROFIBUS address
Axis 1st axis 2nd axis 3rd axis 4th axis
Increments 2500 2500 2500 2500
Setpoint:
Drive no. MD 30110
Actual value:
Drive no. MD 30220
1 2 3 4
6 7 8 9
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
15
6FC5 697−2AA00−1BP5
Page 77

4.8 Digital axis/spindle with direct measuring system (TTL) via ADI4
Table 4-12 SDB: DMS2_ADI4
Starting up the Spindle
PROFIBUS address
Axis 1st axis 2nd axis 3rd axis 4th axis
Increments 5000 5000 5000 5000
Setpoint:
Drive no. MD 30110
Actual value:
Drive no. MD 30220
1 2 3 4
6 7 8 9
15
The axes are assigned correspondingly as per the particular application.
Note for the reader
Toolbox, siemense.txt and ADI4_SDB for DMS.pdf
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
4-77
Page 78
Starting up the Spindle
4.8 Digital axis/spindle with direct measuring system (TTL) via ADI4
This sheet has been left empty for your notes.
4-78
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 79

Starting up the PLC
General
The PLC is intended to control machine−related functional sequences. It is realized as a
software PLC.
The user program − a PLC cycle − is always executed in the same order of sequence.
S Refresh of the process image (inputs, user interface, timers)
S Processing of communication requests (operator panel, PLC 802 programming tool, ver-
sion 3.0 and higher)
S Editing of the user program
S Evaluation of alarms
S Output of the process image (outputs, user interface)
During the cycle, the PLC executes the user program from the first to the last operation. The
user program accesses the hardware inputs/outputs only via the process image and not directly. The PLC refreshes the hardware I/Os at the beginning or end of program execution.
Thus, these signals are stable over a whole PLC cycle.
The user program can only be created using the PLC 802 Programming Tool, version 3.1
and higher, with the S7−200 programming language using ladder diagram. Ladder diagram
is a graphical programming language for representing electric circuit diagrams.
5
Important
PLC 802 Library with a description, which can be installed from the toolbox CD is offered as
the basis for the PLC user program. The PLC 802 Library constitutes a subroutine library
and contains one sample program each for a turning and for a milling machine.
Note
If the stop and reset buttons on the machine control panel are not realized as normally closed contacts, an open circuit cannot be detected.
Monitoring can be performed using software solutions, as shown in the example MCP_802D
(SBR 34) from the subroutine library.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
5-79
Page 80
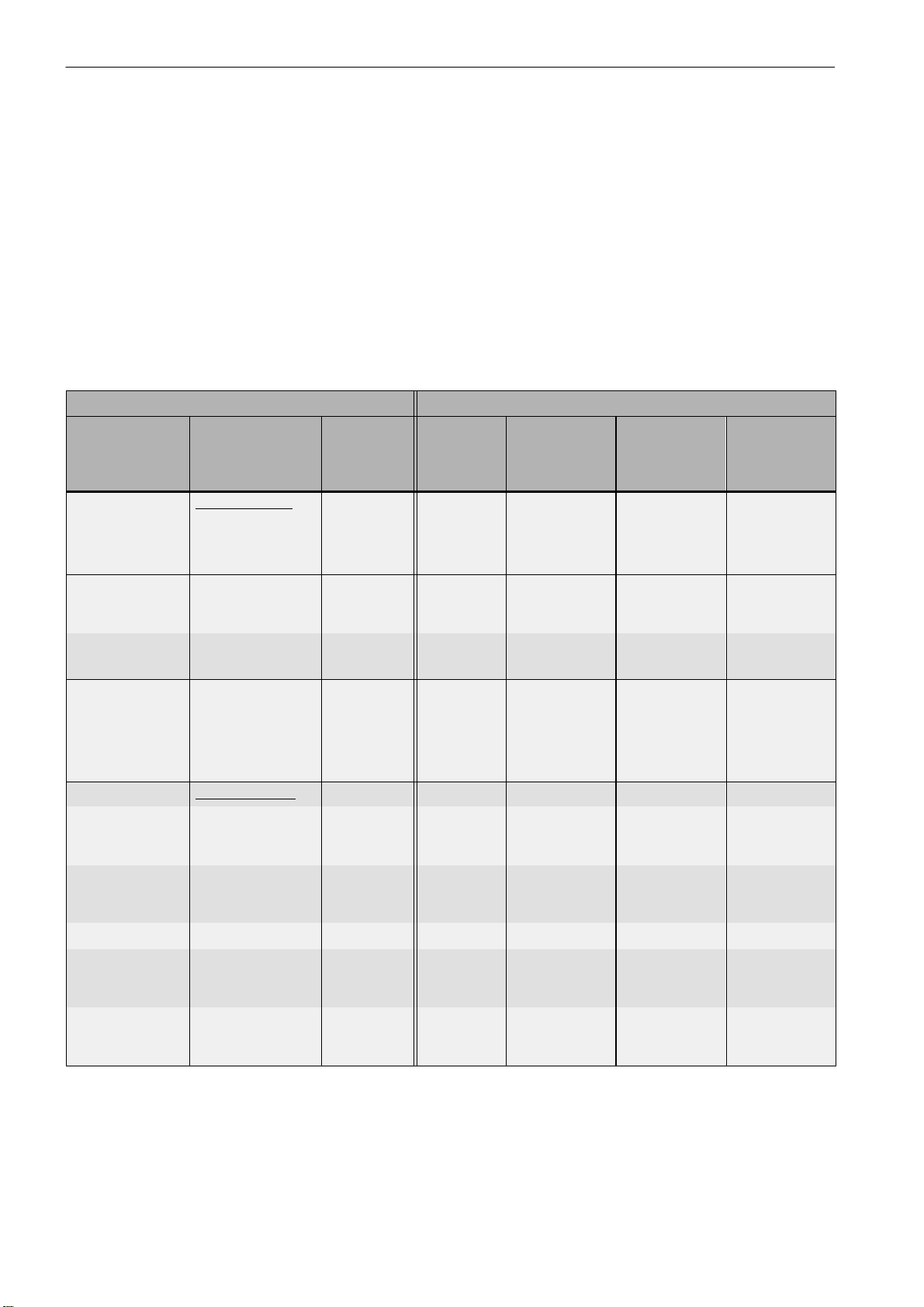
Starting up the PLC
5.1 Commissioning the PLC
5.1 Commissioning the PLC
By default, the user program of the SINUMERIK 802D only consists of a NOP (”no operation”) instruction and is stored in the permanent memory. The user program addressing the
particular requirements of the machine is to be created by the user himself.
5.2 Start−up modes of the PLC
Table 5-1 Start−up modes
Selection Reaction
PCU
Switch−on
menu
(802D)
Normal booting Normal booting User pro-
Booting
with default values
Booting
with saved data
PLC stop
after POWER ON
PCU
Start−up menu
(802D)
NCK start−up *
Booting
with default values
Booting
with saved data
PT PLC 802
(PC)
PLC stop
possible either in Run
or in Stop
PLC
program
preselec-
tion
gram ***
User program ***
User program ***
unchanged Stop unchanged Acceptance of
Program
status
Run unchanged Acceptance of
Run deleted Default PLC
Run saved
Retentive
data
(battery bak-
ked)
data
MD for the
PLC in the
user interface
the active PLC
MD
MD
Saved PLC MD
the active PLC
MD
PLC start−up **
Cold restart Run (after
Stop)
Cold restart
and debug mode
Overall reset User pro-
Overall reset
and debug mode
* Hardkey System / Softkey Start up switch / NCK
** Hardkey System / Softkey Start up switch / PLC
*** is loaded from the permanent memory into the RAM
User program ***
User program ***
gram ***
User program ***
Run unchanged Acceptance of
the active PLC
MD
Stop unchanged Acceptance of
the active PLC
MD
Run deleted Acceptance of
the active PLC
MD
Stop deleted Acceptance of
the active PLC
MD
5-80
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 81

Starting up the PLC
5.2 Start−up modes of the PLC
Thanks to the debug mode (see ”Operation and Programming”, Chapter 7), the PLC remains
in PLC Stop after booting of the control system. All start−up modes set via softkey only
come into effect when the control system is booted the next time.
The ”Run” mode activates the cyclic operation.
The following actions are triggered in the ”Stop” mode:
S All hardware outputs are disabled.
S Profibus DP is inactive.
S No cyclic operation (the active user program is not executed).
S The process image is no longer refreshed (it is frozen).
S EMERGENCY STOP active.
Only in the ”Stop” mode can the user load a corrected or new project into the control system.
The user program only becomes effective when the control system is booted the next time
or if the ”Run” mode is selected.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
5-81
Page 82

Starting up the PLC
5.3 PLC alarms
5.3 PLC alarms
The control system displays max. 8 PLC alarms (system alarms or user alarms).
The PLC manages the alarm information per PLC cycle. It saves / cancels the alarms ac-
cording to their times of occurrence. The first alarm in the list is always the alarm last occurred.
If more than 8 alarms have occurred, the first seven alarms and the newest alarm with the
highest cancel priority are displayed.
Alarm response and cancel criteria
In addition, the alarm responses are managed by the PLC. The alarm responses always
come into effect, irrespective of the number of active alarms. Depending on the type of the
alarm response, the PLC will trigger the required action.
A cancel criterion must be defined for each alarm. The PLC uses the cancel criterion SELF−
CLEARING by default (see ”Configuring user alarms”).
Cancel criteria are:
S POWERONCLEAR: The alarm is canceled by turning off / turning on the control system
(POWER ON).
S CANCELCLEAR: The alarm is canceled by pressing the Cancel key or the Reset key
(analogously to the NCK alarms).
S SELF−CLEARING: The alarm is canceled, since the alarm cause is no longer present.
The cancel conditions have the following priority:
S POWERON CLEAR − system alarms ( highest priority )
S CANCEL CLEAR − system alarms
S SELF−CLEARING − system alarms
S POWERON CLEAR − user alarms
S CANCEL CLEAR − user alarms
S SELF−CLEARING − user alarm ( lowest priority )
The responses to be triggered by the alarm in question in the PLC are defined for each
alarm. The PLC uses the alarm response SHOWALARM by default.
Alarm responses are:
S PLC stop: The user program is not executed any more, Profibus DP is inactive, and the
hardware outputs are disabled.
5-82
S EMERGENCY STOP: Once the user program is executed, the PLC transmits the EMER-
GENCY STOP signal to the NCK via the user interface.
S Feed disable: Once the user program is executed, the PLC transmits the feed disable
signal to the NCK via the user interface.
S Read−in disable: Once the user program is executed, the PLC transmits the read−in dis-
able signal to the NCK via the user interface.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 83

S NC Start inhibited: Once the user program is executed, the PLC signals the ”NC start
inhibited” signal to the NCK via the user interface.
S SHOWALARM : This alarm has no alarm response.
5.3.1 General PLC alarms
Note for the reader
SINUMERIK 802D Diagnostics Guide
5.3.2 User alarms
The user interface ‘’ 1600xxxx ‘’ provides the subareas (0, 1) for the user to define user
alarms.
Starting up the PLC
5.3 PLC alarms
S Subarea 0: 8 x 8 bits to set the user alarms (0 −>1 edge)
Byte 0 : Bit 0 => 1st user alarm ” 700000 ”
Byte 1 : Bit 0 => 9th user alarm ” 700008 ”
Byte 7 : Bit 7 => 64th user alarm ” 700063 “
A new user alarm is activated with the relevant bit (subarea 0) via a 0/1 edge.
S Subarea 1: User alarm variables
Subarea 1 is intended for additional user information; it can only be read / written as a
double−word.
S Subarea 2: Alarm response
Byte 0 : Bit 0 => NC start inhibited
Bit 1 => Read−in disable
Bit 2 => Feed disable for all axes
Bit 3 => EMERGENCY STOP
Bit 4 => PLC STOP
By using subarea 2, the user can evaluate the active alarm responses; this subarea is
read−only.
Self−clearing user alarms must be canceled by the user by resetting the appropriate bit in
subarea 0 (1 −> 0 edge).
Other user alarms are canceled by the PLC after detecting the relevant cancel condition for
the appropriate user alarms. If the bit of the user alarm, however, is still present, the alarm
recurs.
Effect of a user alarm
User alarms have a higher priority than the appropriate signal in the user interface (e.g. NC
start inhibited, read−in disable, feed disable and EMERGENCY STOP).
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
5-83
Page 84

Starting up the PLC
5.3 PLC alarms
Configuring user alarms
A configuration byte is provided for each alarm. The user alarms can be configured by the
user in the machine data 14516: USER_DATA_PLC_ALARM.
Default setting of MD 14516[0...63]: 0 => SHOWALARM/SELF−CLEARING user alarm
Structure of a configuration byte:
S Bit0 − bit5 : Alarm responses
S Bit6 − bit7 : Cancel criteria
Alarm responses: Bit0 − bit 5 = 0: Showalarm (default)
Cancel criteria: Bit6 + bit7 = 0: SELF−CLEARING alarm (default)
Bit0 = 1: NC start inhibited
Bit1 = 1: Read−in disable
Bit2 = 1: Feed disable for all axes
Bit3 = 1: EMERGENCY STOP
Bit4 = 1: PLC stop
Bit5 = reserved
Bit6 = 1 : CANCELCLEAR alarm
Bit7 = 1 : POWERONCLEAR alarm
Alarm texts
The alarm response to PLC Stop always has the cancel condition POWER ON.
The user are offered two options of defining his own alarm texts:
S via the System hardkey> PLC softkey > Edit PLC txt (cf. ”Operation and Program-
ming”, Chapter 7)
S by using the toolbox: Editing and loading the alarm text file using the text manager
If no alarm text is assigned by the user, only the alarm number is displayed.
The % character in the alarm text denotes an additional variable. The variable type is the
form of representation of the variable.
The following variable types are possible:
S %D integer decimal number
S %I integer decimal number
S %U decimal number without sign
S %O integer octal number
S %X integer hexadecimal number
S %B binary representation of a 32−bit value
5-84
S %F 4−byte floating point number
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 85

Examples of user alarm texts (Note: The text after the ”//” is a comment and is not dis-
played.)
S 700000 ‘’ ‘’ // only the user alarm number
S 700001 ‘’ Hardware limit switch + of the X axis’’
S 700002 ‘’ %D ‘’ // only a variable as an integer decimal number
S 700003 ‘’ Alarm number with a fixed alarm text and the variable %X ‘’
S 700004 ‘’ %U Alarm number with variable and fixed alarm text ‘’
S 700005 ‘’Axis monitoring active : %U’’
Display: 700005 ‘’Axis monitoring active : 1
or 700005 Axis monitoring active : 3
5.4 PLC programming
The PLC user program is created using the PLC 802 Programming Tool.
Starting up the PLC
5.4 PLC programming
The handling of this tool for an S7−200 is described in the documentation ”SIMATIC S7−200
Automation System Manual”. The PLC 802 Programming Tool constitutes a subset of this
documentation.
Compared to the S7− 200 MicroWin base system, the following is to be observed:
S The user program can only be programmed in ladder diagram.
S Only a subset of the S7−200 programming language is supported.
S The compilation of the user program is performed offline on a PG/PC or automatically
when downloading into the control system.
S The project can be loaded into the control system (download).
S It is also possible to load the project from the control system (upload).
S Indirect data addressing is not possible. Thus, no programming errors will occur during
the runtime.
S The user must manage the data and process information type−specifically.
Example:
Information 1 T value Memory size DWord (32−bit)
Information 2 Override Memory size Byte (8−bit)
User data
Byte 0 DWord (information 1)
Byte 4 bytes (information 2)
The user must not access this data together; otherwise, he should have to observe the
data access.
S Furthermore, the alignment of the data in the memory model and their types must be ob-
served for all data.
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
5-85
Page 86

Starting up the PLC
5.4 PLC programming
Example:
Memory bits MB0.1,MB3.5
Memory bytes MB0,MB1,MB2
Memory word MW0,MW2,MW4
MW3, MW5 ... are not permissible
Memory double wordsMD0,MD4,MD8
MD1,MD2,MD3, MD5 ... are not permissible
Table 5-2 PLC data types permitted in the control system
Data type
BOOL 1 Bit 1 0.1 −
BYTE 1 byte 1 00 ... FF 0 ... +255
WORD 2 bytes 2 0000 ... FFFF −32 768 ... + 32 767
DWORD
(Double
Word)
REAL 4 bytes 4 − $10
Size Address
alignment
4 bytes 4 0000 0000 ... FFFF FFFF −2 147 483 648 ...
Range for logical operations Range for arithmetical operations
+2 147 483 647
−37
... $10
38
PLC project
The PLC 802 Programming Tool always manages one project (combinational logic, symbols
and comments). All important information of a project can be stored in the control system via
a download. The information is transmitted from the control to the PC via upload.
The control system can save max. 6,000 instructions and 1,500 symbols. The PLC memory
required is influenced by the following components:
S number of instructions
S number and length of the symbol names
S number and length of the comments
S7−200 Ladder Diagram
The addresses and operations can be defined using the representation type ”International”.
When using the ladder diagram, the user programs his program in networks. Each network
corresponds to a certain logic reflecting a certain sequence. The basic elements of a ladder
diagram are contacts, coils and boxes. The contacts, in turn, are divided into normally
opened and normally closed contacts. Each coil corresponds to a relay. Boxes are used to
represent a certain function. A box can be activated using an enable bit.
5-86
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 87

5.4.1 Command overview
Table 5-3 Operand identifier
Starting up the PLC
5.4 PLC programming
Operand identifier
Description Area
V Data V1000 0000.0 to V7999 9999.7
T Timers T0 to T15 (100 ms)
T16 to T39 (10 ms)
C Counter C0 to C31
I Image of digital inputs I0.0 to I17.7
Q Image of digital outputs Q0.0 to Q11.7
M Flags M0.0 to M383.7
SM Special bit memory SM0.0 to SM 0.6
(see Table 5-6)
AC ACCU AC0 ... AC3
L Local data L0.0 to L51.7
Table 5-4 Forming the address in the V area (see ”User interface”)
Type identifi-
cation (mo-
dule no.)
00
(10−79)
Area no.
(channel/
axis no.)
00
(00−99)
Subarea Offset Addressing
0
(0−9)
000
(000−999)
symbolic
(8−digit)
Table 5-5 802D Operand Ranges
Access Method
Valid Operand Ranges for
Programming 802D
Bit Access (Byte.Bit) V(1000 0000.0−7900 9999.7)
I(0.0−17.7)
Q(0.0−11.7)
M(0.0−255.7)
SM(0.0−0.7)
−
T(0−39)
C(0−31)
Byte Access VB(1000 0000−7999 9999)
IB(0−17)
QB(0−11 )
MB(0−383)
AC(0−3)
SMB(0)
−
KB (Constant)
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
5-87
Page 88

Starting up the PLC
5.4 PLC programming
Table 5-5 802D Operand Ranges
Word Access VW(1000 0000−7999 9998)
Double Word Access VD(1000 0000−7999 9994)
Access Method Valid Operand Ranges for
Programming 802D
T(0−39)
C(0−31)
IW(0−16)
QW(0−10)
MW(0−382)
AC(0−3)
−
−
KW (Constant)
ID(0−14)
QD(0−8)
MD(0−380)
AC(0−3)
−
−
AC(0−3)
KD (Constant)
Table 5-6 Special bit memory SM Bit Definition
SM bits
Description
SM 0.0 Bit memory with defined ONE signal
SM 0.1 Initial position : first PLC cycle ‘1’, subsequent cycles ‘0’
SM 0.2 Buffered data lost − only valid in the first PLC cycle
(‘0’ − data o.k., ‘1’ − data lost)
SM 0.3 POWER ON: first PLC cycle ‘1’, subsequent cycles ‘0’
SM 0.4 60 s clock (alternating ‘0’ for 30 s, then ‘1’ for 30 s)
SM 0.5 1 s clock (alternating ‘0’ for 0.5 s, then ‘1’ for 0.5 s)
SM 0.6 PLC cycle clock (alternating one cycle ‘0’, then one cycle’)
The user can only view the statement list (STL) in PT802 under ”View STL”. This type of
representation (see Table : Mnemonic) shows the sequential processing.
5-88
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 89

5.4.2 Explanation of the stack operations
LB
Table 5-7 INSTRUCTIONS Set
BASIC BOOLEAN INSTRUCTIONS
Instruction Ladder Symbol Valid Operands
Load
And
Or
normal open
n=1 close
n=0 open
n
Starting up the PLC
5.4 PLC programming
n: V, I, Q, M, SM, T, C, L
Load Not
And Not
Or Not
normal close
n=0 close
n=1 open
Output prior 0, n=0
prior 1, n=1
Set
(1 Bit)
Reset
(1 Bit)
prior 0, not set
prior 1 or ½
prior 0, no reset
prior 1 or ½
Instruction Ladder Symbol Valid Operands
Edge Up prior ½ close
(1 PLC cycle)
Edge Down prior ¿ close
(1 PLC cycle)
Logical Not prior 0, later 1
prior 1, later 0
No operation
n
n
Bit
S
Bit
R
n: V, I, Q, M, SM, T, C, L
n: V, I, Q, M,T, C, L
S_Bit: V, I, Q, M,T, C, L
n =1
S_Bit: V, I, Q, M,T, C, L
n =1
OTHER BOOLEAN INSTRUCTIONS
P
N
NOT
n
NOP
n = 0 ... 255
Instruction Ladder Symbol Valid Operands
Load Byte =
And Byte =
a = b close
a b open
Or Byte =
Load Byte .
And Byte .
a ≥ b close
a t b open
Or Byte .
Load Byte 3
And Byte 3
a ≤ b close
a u b open
Or Byte 3
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
BYTE COMPARES (Unsigned)
a
==B
b
a
> =B
b
a
< =B
b
a: VB, IB, QB, MB, SMB, AC, Constant,
b: VB, IB, QB, MB, SMB, AC, Constant,
LB
5-89
Page 90

Starting up the PLC
LW
5.4 PLC programming
Instruction Ladder Symbol Valid Operands
Load Word =
And Word =
Or Word =
a = b close
a b open
WORD COMPARES (Signed)
a
==I
b
a: VW, T, C, IW, QW, MW, AC, Constant,
LW
b: VW, T, C, IW, QW, MW, AC, Constant,
Load Word .
And Word .
Or Word .
Load Word 3
And Word 3
Or Word 3
Load DWord =
And DWord =
Or DWord =
Load DWord .
And DWord .
Or DWord .
Load DWord 3
And DWord 3
Or DWord 3
Load RWord =
And RWord =
Or RWord =
a ≥ b close
a t b open
a ≤ b close
a u b open
a
> =I
b
a
< =I
b
DOUBLE WORD COMPARES (Signed)
Instruction Ladder Symbol Valid Operands
a = b close
a b open
a ≥ b close
a t b open
a ≤ b close
a u b open
a
==D
b
a
> =D
b
a
< =D
b
a: VD, ID, QD, MD, AC, Constant, LB
b: VD, ID, QD, MD, AC, Constant, LB
REAL WORD COMPARES (Signed)
Instruction Ladder Symbol Valid Operands
a = b close
a b open
= =R
a
a: VD, ID, QD, MD, AC, Constant, LD
b: VD, ID, QD, MD, AC, Constant, LD
b
Load RWord .
And RWord .
Or RWord .
Load RWord 3
And RWord 3
Or RWord 3
5-90
a ≥ b close
a t b open
a ≤ b close
a u b open
> =R
a
< =R
b
a
b
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 91

Instruction Ladder Symbol Valid Operands
Timer Retentive On
Delay
EN=1, Start
EN=0, Stop
If T
T
bit
Val ue
=1
≥ PT,
Timer On Delay EN=1, Start
EN=0, Stop
If T
T
bit
Val ue
=1
≥ PT,
TIMER
Txxx
TONR
IN
PT
Txxx
TON
IN
PT
Starting up the PLC
5.4 PLC programming
Enable: (IN)
S0
Txxx: T0 − T31
Preset: (PT)
VW, T, C, IW, QW, MW, AC,
Constant
100 ms T0 − T15
10 ms T16 − T39
Enable: (IN)
S0
Txxx: T0 − T31
Preset: (PT)
VW, T, C, IW, QW, MW, AC,
Constant
100 ms T0 − T15
10 ms T16 − T39
Timer Of Delay If T
T
bit
Val ue
=1
< PT,
IN
PT
Txxx
TOF
Enable: (IN)
S0
Txxx: T0 − T31
Preset: (PT)
VW, T, C, IW, QW, MW, AC,
Constant
100 ms T0 − T15
10 ms T16 − T39
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
5-91
Page 92

Starting up the PLC
5.4 PLC programming
Instruction Ladder Symbol Valid Operands
Count Up CU ½, Value+1
R=1, Reset
If C
C
Count Up/Down CU ½, Value+1
CD ½, Value−1
R=1, Reset
If C
C
Count Down If C
C
bit
bit
bit
Val ue
=1
Val ue
=1
Val ue
=1
≥ PV,
≥ PV,
= 0,
COUNTER
Cxxx
CTU
CU
R
PV
Cxxx
CU
CTUD
CD
R
PV
Cxxx
CD
CTD
LD
PV
Cnt Up: (CU)
S1
Reset: (R)
S0
Cxxx: C0 − 31
Preset: (PV)
VW, T, C, IW, QW, MW, AC,
Constant, LW
Cnt Up: (CU)
S2
Cnt Dn: (CD)
S1
Reset: (R)
S0
Cxxx: C0 − 31
Preset: (PV)
VW, T, C, IW, QW, MW, AC,
Constant, LW
Cnt Down: (CD)
S2
Reset: (R)
S0
Cxxx: C0 − 31
Preset: (PV)
VW, T, C, IW, QW, MW, AC,
Constant, LW
Instruction Ladder Symbol Valid Operands
Word Add
Word Subtract
If EN = 1,
b = a + b
b = b − a
DWord Add
DWord Subtract
If EN = 1,
b = a + b
b = b − a
Multiply If EN = 1,
b = a x b
MATH OPERATIONS
ADD_I
EN
ENO
IN1
OUT
IN2
SUB_DI
EN
ENO
IN1
OUT
IN2
MUL
EN
ENO
IN1
OUT
IN2
Enable: EN
In: VW, T, C, IW, QW, MW, AC,
Constant, LW
Out: VW, T, C, IW, QW, MW, AC, LW
Enable: EN
In: VD, ID, QD, MD, AC, Constant, LD
Out: VD, ID, QD, MD, AC, LD
Enable: EN
In: VW, T, C, IW, QW, MW, AC,
Constant, LW
Out: VD, ID, QD, MD, AC, LD
5-92
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 93

Instruction Valid OperandsLadder Symbol
Divide If EN = 1,
b = b ÷ a
Out:
16 bit remainder
Out+2:
16 bit quotient
EN
IN1
IN2
DIV
ENO
OUT
Starting up the PLC
5.4 PLC programming
Enable: EN
In: VW, T, C, IW, QW, MW, AC,
Constant, LW
Out: VD, ID, QD, MD, LD
Add
Subtract
Real Numbers
Multiply
Divide
Real Numbers
Increment
Decrement
Byte
Increment
Decrement
Word
If EN = 1,
b = a + b
b = b − a
If EN = 1,
b = a x b
b = b ÷ a
ADD_R
EN
IN1
IN2
MUL_R
EN
IN1
IN2
ENO
OUT
ENO
OUT
Enable: EN
In: VD, ID, QD, MD, AC, Constant, LD
Out: VD, ID, QD, MD, AC, LD
Enable: EN
In: VD, ID, QD, MD, AC, Constant, LD
Out: VD, ID, QD, MD, AC, LD
INCREMENT, DECREMENT
Instruction Ladder Symbol Valid Operands
If EN = 1,
a = a + 1
a = a − 1
If EN = 1,
a = a + 1
a = a − 1
a = /a
EN
IN
INC_W
EN
IN
INC_B
ENO
OUT
ENO
OUT
Enable: EN
In: VB, IB, QB, MB, AC, Constant LB
Out: VB, IB, QB, MB, AC, LB
Enable: EN
In: VW, T, C, IW, QW, MW, AC,
Constant, LW
Out: VW, T, C, IW, QW, MW, AC, LW
Increment
Decrement.
Byte AND
Byte OR
Byte XOR
Word AND
Word OR
Word XOR
If EN = 1,
a = a + 1
a = a − 1
INV_DW
EN
IN
ENO
OUT
Enable: EN
In: VD, ID, QD, MD, AC, Constant, LD
Out: VD, ID, QD, MD, AC, LD
LOGIC OPERATIONS
Instruction Ladder Symbol Valid Operands
If EN = 1,
b = a AND b
b = a OR b
b = a XOR b
If EN = 1,
b = a AND b
b = a OR b
b = a XOR b
WAND_B
EN
IN1
IN2
WAND_W
EN
IN1
IN2
ENO
OUT
ENO
OUT
Enable: EN
In: VB, IB, QB, MB, AC, Constant, LB
Out: VB, IB, QB, MB, AC, LB
Enable: EN
In: VW, T, C, IW, QW, MW, AC,
Constant, LW
Out: VW, T, C, IW, QW, MW, AC, LW
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
5-93
Page 94

Starting up the PLC
5.4 PLC programming
Instruction Valid OperandsLadder Symbol
DWord AND
DWord OR
DWord XOR
If EN = 1,
b = a AND b
b = a OR b
b = a XOR b
WXOR_DW
EN
ENO
IN1
OUT
IN2
Enable: EN
In: VD, ID, QD, MD, AC, Constant, LD
Out: VD, ID, QD, MD, AC, LD
Invert Byte If EN = 1,
a = /a
Invert Word If EN = 1,
a = /a
Invert DWord If EN = 1,
a = /a
Instruction Ladder Symbol Valid Operands
Shift Right
Shift Left
If EN = 1,
a = a SR c bits
a = a SL c bits
Shift Right
Shift Left
If EN = 1,
a = a SR c bits
a = a SL c bits
DWord Shift R
DWord Shift L
If EN = 1,
a = a SR c bits
a = a SL c bits
INC_B
EN
IN
INC_W
EN
IN
INV_DW
EN
IN
ENO
OUT
ENO
OUT
ENO
OUT
Enable: EN
In: VB, IB, QB, MB, AC, Constant, LB
Out: VB, IB, QB, MB, AC, LB
Enable: EN
In: VW, T, C, IW, QW, MW, AC,
Out: VW, T, C, IW, QW, MW, AC, LW
Enable: EN
In: VD, ID, QD, MD, AC, Constant, LD
Out: VD, ID, QD, MD, AC, LD
SHIFT AND ROTATE OPERATIONS
SHL_R
EN
IN
N
SHL_W
EN
IN
N
ENO
OUT
ENO
OUT
Enable: EN
In: VB, IB, QB, MB, AC, Constant, LB
Out: VB, IB, QB, MB, AC
Count: VB, IB, QB, MB, AC, Constant, LB
Enable: EN
In: VW, T, C, IW, QW, MW, AC,
Out: VW, T, C, IW, QW, MW, AC, LW
Count: VB, IB, QB, MB, AC, Constant, LB
SHL_DW
EN
IN
N
ENO
OUT
Enable: EN
In: VD, ID, QD, MD, AC, Constant, LD
Out: VD, ID, QD, MD, AC, LD
Count: VB, IB, QB, MB, AC, Constant, LB
Constant, LW
Constant, LW
Convert Double
Word Integer to a
Real
Convert a Real to a
Double Word Integer
5-94
CONVERSION OPERATIONS
Instruction Ladder Symbol Valid Operands
If EN = 1, convert the
double word integer i
to a real number o.
If EN = 1, convert the
real number i to a
double word integer o.
DI_REAL
EN
IN
TRUNC
EN
IN
ENO
OUT
ENO
OUT
Enable: EN
In: VD, ID, QD, MD, AC, Constant, LD
Out: VD, ID, QD, MD, AC, LD
Enable: EN
In: VD, ID, QD, MD, AC, Constant, LD
Out: VD, ID, QD, MD, AC, LD
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 95
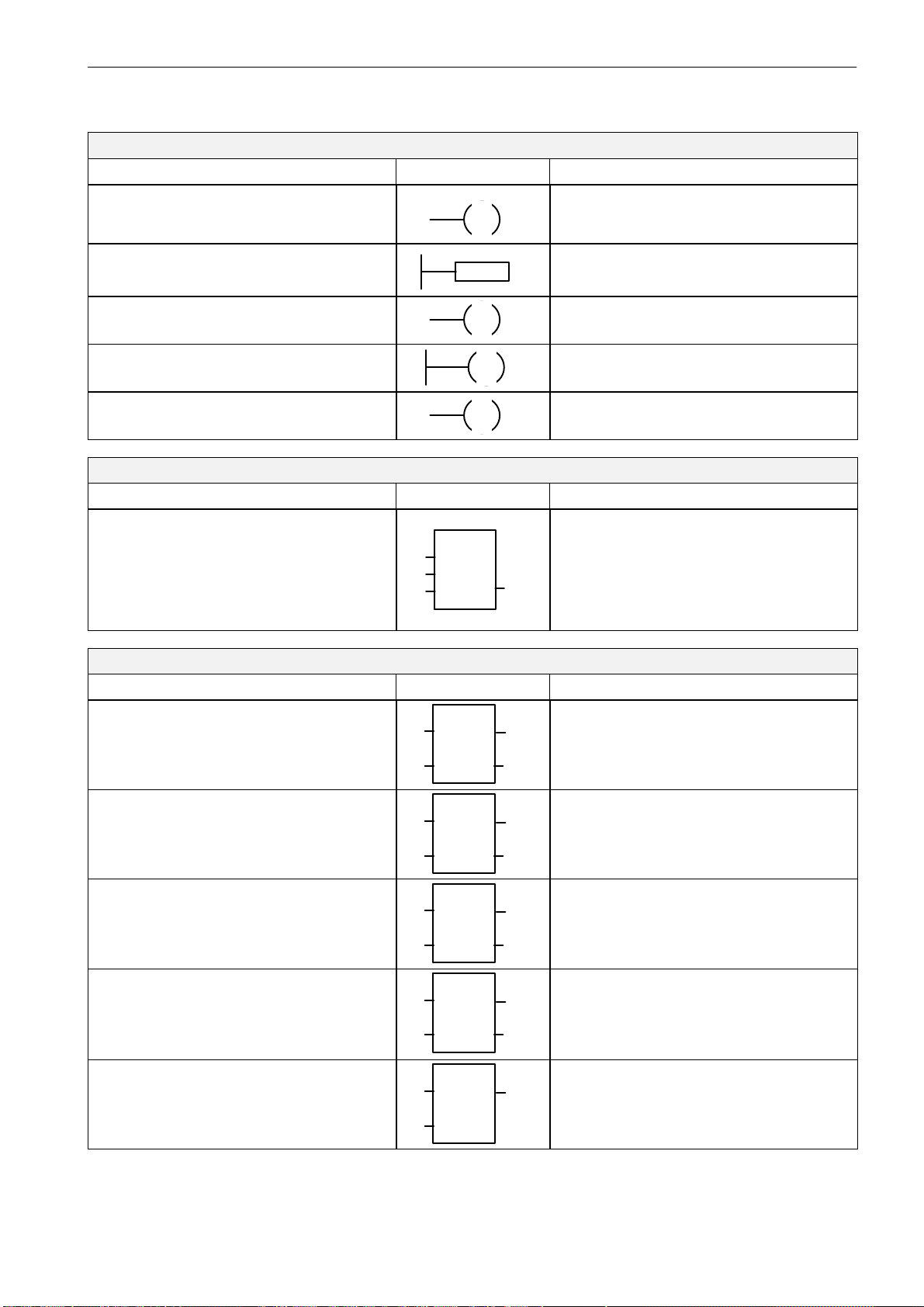
PROGRAM CONTROL FUNCTIONS
Instruction Ladder Symbol Valid Operands
Jump to Label If EN = 1, go to label n.
n
JMP
Starting up the PLC
5.4 PLC programming
Enable: EN
Label: WORD: 0−127
Label Label marker for the
jump.
Conditional Return
from Subroutine
Return from Subrou-
If EN = 1, exit the subroutine.
Exit subroutine.
tine
Conditional End If EN = 1, END termi-
nates the main scan.
PROGRAM CONTROL FUNCTIONS
Instruction Ladder Symbol Valid Operands
Subroutine If EN ½, go to subrou-
tine n.
MOVE, FILL AND FIND OPERATIONS
Instruction Ladder Symbol Valid Operands
Move Byte If EN = 1,
copy i to o.
n
LBL
RET
RET
END
n
SBR
EN
x1
x3
x2
(x... optional parameters)
MOV_B
EN
ENO
OUT
IN
Label: WORD: 0−127
Enable: EN
Enable: EN
Label: Constant : 0−63
Enable: EN
In: VB, IB, QB, MB, AC, Constant, LB
Out: VB, IB, QB, MB, AC, LB
Move Word If EN = 1,
copy i to o.
Move DWord If EN = 1,
copy i to o.
Move Real If EN = 1,
copy i to o.
Swap Bytes If EN = 1,
exchange MSB and
LSB of w.
MOV_W
EN
IN
MOV_DW
EN
IN
MOV_R
EN
IN
SWAP
EN
IN
ENO
OUT
ENO
OUT
ENO
OUT
ENO
Enable: EN
In: VW, T, C, IW, QW, MW, AC,
Constant, LW
Out: VW, T, C, IW, QW, MW, AC, LW
Enable: EN
In: VD, ID, QD, MD, AC, Constant, LD
Out: VD, ID, QD, MD, AC, LD
Enable: EN
In: VD, ID, QD, MD, AC, Constant, LD
Out: VD, ID, QD, MD, AC, LD
Enable: EN
In: VW, IW, QW, MW, T, C, AC, LW
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
5-95
Page 96

Starting up the PLC
5.4 PLC programming
5.4.3 Program organization
Every programmer should structure the user program divided into separate program sections (subroutines). The S7−200 programming language offers the user the possibility to
create a structured user program. There are two program types − main program and subroutine. Eight program levels are possible.
A PLC cycle can be a multiple of the control−internal interpolation cycle (IPO cycle). The
machine manufacturer must set the PLC cycle according to his particular conditions (see
machine data ”PLC_IPO_TIME_RATIO”). An IPO/ PLC ratio of 1:1 has been proven to provide the fastest possible cyclic program execution.
Example: The programmer will write a sequence control in the main program using a cycle
defined by himself. This sequence control will organize all cyclic signals in the subroutine
(UP0); UP1/UP2 are called every two cycles, and UP3 controls all signals at an interval of
three cycles.
5.4.4 Data organization
The data can be divided into three areas:
S non−retentive data
S retentive data
S machine data for the PLC (all these machine data are active after POWER ON).
Most of the machine data, such as process image, timer and counter are non−retentive data
which are deleted each time when the control system is powered up.
The data area 1400 0000 −1400 0127 is reserved for the retentive data. The user can here
store all data which are to remain valid after POWER ON.
The user can either load the data in his program with default data using the PLC machine
data (see ”User interface”) or parameterize various program sections.
5.4.5 Interface to the control system
This interface can be selected via SYSTEM, softkeys PLC > STEP7−connect.
This V24 interface continues to be active even after cold restart or normal booting. The con-
nection (STEP7 connect active) to the control system can be checked in the ”PLC/information” menu of the PLC 802 Programming Tool. If the interface is active, the active PLC
mode, for example (Run/Stop) is displayed in this window.
5-96
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 97

5.4.6 Testing and monitoring your program
A check or error analysis of the user program is possible as follows:
S PLC status: Display and change of called operands
S Status list: Display and change of three freely selectable variable fields
S PLC program: Display and monitoring (status) of the entire user program including sym-
bols and comments
S PT PLC 802: Connecting a PG/PC and activating the PT. Connection also possible via
modem
Starting up the PLC
5.4 PLC programming
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
5-97
Page 98

Starting up the PLC
5.5 PLC applications ”Download/Upload/Copy/Compare”
5.5 PLC applications ”Download/Upload/Copy/Compare”
The user can save, copy or overwrite the PLC project or the PLC applications in the control
system.
This is possible using
S PLC 802 Programming Tool
S WINPCIN (binary file)
S NC card
PT PLC 802
Toolbox
WINPCIN
Download/
Upload/
Compare
802D
PLC user
alarm
texts
PLC
application
Series machine start−up
PLC
project
Permanent
memory
PLC
machine data
Series machine start−up
PLC
application
NC card
Fig. 5-1 PLC applications in the control system
5-98
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
Page 99

Download
Upload
Starting up the PLC
5.5 PLC applications ”Download/Upload/Copy/Compare”
This function writes the transmitted data to the permanent memory (load memory) of the
control system.
S Download from the PLC project using the PLC 802
Programming Tool (Step 7 connect on)
S Machine series start−up using the WINPCIN tool (PLC MD, PLC project and user alarm
texts), DataIn or the NC card.
S Reading in PLC applications using the WINPCIN tool or theNC card (PLC project and
user alarm texts) analogously to the series machine start−up DataIn
When the control system is powered up next time, the loaded PLC user program is
transferred from the permanent memory to the user memory and is active in the control system from this moment.
The PLC applicationscan be saved from the permanent memory of the control system using
the either PLC 802 Programming Tool, WINPCIN or the NC card.
Compare
Version display
S Upload from the PLC project using the PLC 802 Programming Tool (Step 7 connect on)
Reading out the project from the control system and thus reconstructing the current project in the PLC 802 Programming Tool.
S Machine series start−up ”Start−up data” using the WINPCIN tool (PLC MD, PLC project
and user alarm texts), DataIn or the NC card.
S Reading out PLC applications using the WINPCIN tool or theNC card (PLC project and
user alarm texts) analogously to the series machine start−up DataOut
This function compares the project contained in the PLC 802 Programming Tool with the
project loaded in the permanent memory (load memory) in the control system.
This function is called using the SYSTEM hardkey, Service Display / Versionsoftkeys.
S Project
The transferred project including the user program which is active in the user memory of
the PLC after booting of the control system.
The programmer can use the start of the first comment line in the comment of OB1 in the
PLC 802 Programming Tool for his own supplementary information in the version display
(see ”View Properties”).
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
5-99
Page 100

Starting up the PLC
5.6 User interface
5.6 User interface
This interface comprises all signals exchanged between NCK/PLC and HMI/PLC. In addition, the PLC decodes all auxiliary function commands for processing in the user program.
Note for the reader
/FB/ Sinumerik 802D Description of Functions, Chapter 20
5-100
SINUMERIK 802D, 802D bl Start−up (IBN), 08/05 Edition
6FC5 697−2AA00−1BP5
 Loading...
Loading...