

Page 1

ControlLogix Hydraulic
Servo Module
User Manual
Catalog Numbers
1756-HYD02
Page 2
Important User Information
Solid state equipment has operational characteristics differing from those of electromechanical equipment. Safety Guidelines for the
Application, Installation and Maintenance of Solid State Controls (publication SGI-1.1 available from your local Rockwell Automation sales
office or online at http://literature.rockwellautomation.com
wired electromechanical devices. Because of this difference, and also because of the wide variety of uses for solid state equipment, all
persons responsible for applying this equipment must satisfy themselves that each intended application of this equipment is acceptable.
In no event will Rockwell Automation, Inc. be responsible or liable for indirect or consequential damages resulting from the use or
application of this equipment.
The examples and diagrams in this manual are included solely for illustrative purposes. Because of the many variables and requirements
associated with any particular installation, Rockwell Automation, Inc. cannot assume responsibility or liability for actual use based on the
examples and diagrams.
No patent liability is assumed by Rockwell Automation, Inc. with respect to use of information, circuits, equipment, or software described in
this manual.
Reproduction of the contents of this manual, in whole or in part, without written permission of Rockwell Automation, Inc., is prohibited.
Throughout this manual, when necessary, we use notes to make you aware of safety considerations.
) describes some important differences between solid state equipment and hard-
WARNING
Identifies information about practices or circumstances that can cause an explosion in a
hazardous environment, which may lead to personal injury or death, property damage, or
economic loss.
IMPORTANT
ATTENTION
Identifies information that is critical for successful application and understanding of the product.
Identifies information about practices or circumstances that can lead to personal injury or death,
property damage, or economic loss. Attentions help you identify a hazard, avoid a hazard, and
recognize the consequence
SHOCK HAZARD
Labels may be on or inside the equipment, for example, a drive or motor, to alert people that
dangerous voltage may be present.
BURN HAZARD
Labels may be on or inside the equipment, for example, a drive or motor, to alert people that
surfaces may reach dangerous temperatures.
Allen-Bradley, Rockwell Automation, and TechConnect are trademarks of Rockwell Automation, Inc.
Trademarks not belonging to Rockwell Automation are property of their respective companies.
Page 3

Table of Contents
Preface
What is the 1756-HYD02 Module?
Installing the 1756-HYD02 Module
Using This Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Who Should Use This Manual. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
The Purpose of This Manual. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Related Documentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Chapter 1
What the Module Does . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Using A ControlLogix Hydraulic Servo Module in the
ControlLogix System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Physical Features of the ControlLogix Hydraulic Servo Module . 10
Certifying Agency Approvals. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Full Class I Division 2 Compliance. . . . . . . . . . . . . . . . . . . . . . . . . 11
Preventing Electrostatic Discharge . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Removal and Insertion Under Power . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Chapter 2
What This Chapter Contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Note the Power Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Installing the Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Keying the Removable
Terminal Block. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Connecting Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Two Types of RTBs (each RTB comes with housing) . . . . . . . . . 16
Wiring the 1756-HYD02 Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Wiring Registration Sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Wiring the Home Limit Switch Input. . . . . . . . . . . . . . . . . . . . . . . 20
Wiring the OK Contacts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Connecting LDTs to Your Hydraulic Module . . . . . . . . . . . . . . . . 21
Assembling The Removable Terminal Block and the Housing. . . . . . 23
Choosing the Extended-Depth Housing . . . . . . . . . . . . . . . . . . . . . . . 24
Suggestions for Using the Extended-Depth Housing . . . . . . . . . . 25
Cabinet Size Considerations With the
Extended-Depth Housing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Installing the Removable Terminal Block. . . . . . . . . . . . . . . . . . . . . . . 26
Removing the Removable Terminal Block . . . . . . . . . . . . . . . . . . . . . . 28
Removing the Module from the Chassis. . . . . . . . . . . . . . . . . . . . . . . . 29
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3Publication 1756-UM525A-EN-P - June 2003 3
Page 4

Table of Contents
Configuring the 1756-HYD02
Module
Using the 1756-HYD02 Module
Features
Chapter 3
Using RSLogix 5000 Configuration Software. . . . . . . . . . . . . . . . . . . . 31
Overview of the Configuration Process . . . . . . . . . . . . . . . . . . . . . . . . 32
Creating a New Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Configuring General Module Features . . . . . . . . . . . . . . . . . . . . . . . . . 35
Configuring the Axes Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Downloading New Configuration Data . . . . . . . . . . . . . . . . . . . . . . . . 37
Editing Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Reconfiguring Module Parameters in Run Mode . . . . . . . . . . . . . . . . . 39
Reconfiguring Module Parameters in Program Mode . . . . . . . . . . . . . 39
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Chapter 4
What This Chapter Contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Using General Module Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Servo Update Period . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Module Fault Reporting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Fully Software Configurable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Electronic Keying . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Using Axes Features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
General Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Motion Planner Tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Units Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Servo Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Feedback Tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Conversion Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Homing Tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Hookup Tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Tune Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Dynamics Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Gains Tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Output Tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Limits Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Offset Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Fault Actions Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Tag Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4 Publication 1756-UM525A-EN-P - June 2003
Page 5

Troubleshooting the 1756-HYD02
Module
Specifications
Glossary
Table of Contents
Chapter 5
What This Chapter Contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Using the Status Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Using the OK Indicator. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Using the FDBK Indicator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Using the DRIVE Indicator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Using RSLogix 5000 to Troubleshoot the Module. . . . . . . . . . . . . . . . 81
Warning Signal in Controller Organizer . . . . . . . . . . . . . . . . . . . . . 81
Fault Message in Status Line . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Notification in Axis Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Chapter Summary and What’s Next . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Appendix A
Index
Publication 1756-UM525A-EN-P - June 2003 5
Page 6

Table of Contents
6 Publication 1756-UM525A-EN-P - June 2003
Page 7
Preface
Using This Manual
Who Should Use This
This preface describes how to use this manual.
To effectively use this manual, you should be able to program and operate the
Rockwell Automation ControlLogix controllers to efficiently use your
Manual
ControlLogix Hydraulic Servo module. In this manual, we also refer to the
module as the 1756-HYD02 module.
If you need more information about programming and operating the
ControlLogix controllers, refer to the Logix5000 Controller User Manual,
publication number
The Purpose of This Manual
This manual describes how to set up, configure and troubleshoot your
1756-HYD02 module. The following table lists describes each section in this
manual:
1756-UM001
If you are looking for this information: See this section
Description of the module and what it does. Chapter 1
.
What is the 1756-HYD02 Module?
Step by step description of how to install and
wire the module.
Description of how to use RSLogix 5000
programming software to configure the
module.
Complete listing of the module’s features,
including the general module features and
features that specifically affect the data
coming from axes connected to either of the
module’s channels.
Description of how to troubleshoot any
problems with the module, including the use
of status indicators on the module and
software fault messages in RSLogix 5000.
Specifications for the module. Appendix A
Chapter 2
Installing the 1756-HYD02 Module
Chapter 3
Configuring the 1756-HYD02 Module
Chapter 4
Using the 1756-HYD02 Module Features
Chapter 5
Troubleshooting the 1756-HYD02 Module
Specifications
7Publication 1756-UM525A-EN-P - June 2003 7
Page 8
Preface Preface
Related Documentation
Publication
Number
1756-IN580
1756-IN080
1756-IN613
1756-IN573
1756-IN574
1756-UM001
1756-RM003
The following table lists related ControlLogix documentation:
Publication Description
ControlLogix Hydraulic Servo Module
Installation Instructions
ControlLogix Chassis Installation Instructions Provides instructions for installing a
ControlLogix Power Supply Installation
Instructions
ControlLogix Redundant Power Supply
Installation Instructions
ControlLogix Redundant Power Supply Chassis
Adapter Module Installation Instructions
Logix5000 Controller User Manual Provides information for using your Logix5000
Logix5000 Controller Instruction Set Reference
Manual
Provides instructions for installing, wiring, and
troubleshooting your 1756-HYD02 module.
ControlLogix chassis
Provides instructions for installing a
ControlLogix power supply
Provides instructions for installing a
ControlLogix redundant power supply
Provides instructions for installing a
ControlLogix redundant power supply chassis
adapter module
controller and its components.
Provides descriptions of all the instructions
supported by the RSLogix 5000 programming
software.
To view or order the publications listed above, visit:
• http://literature.rockwellautomation.com
8 Publication 1756-UM525A-EN-P - June 2003
Page 9
Chapter
What is the 1756-HYD02 Module?
This chapter describes the ControlLogix Hydraulic Servo module.
For more information about: See page:
What the Module Does 9
1
What the Module Does
Using A ControlLogix Hydraulic Servo Module in
the ControlLogix System
Certifying Agency Approvals 11
Preventing Electrostatic Discharge 12
Removal and Insertion Under Power 12
THe 1756-HYD02 module is typically used for accurate positioning and
control of a hydraulic cylinder. The module can be wired to a linear
displacement transducer (LDT) for feedback and a proportional or servo valve
for control of a hydraulic axis and connects to a hydraulic system to close a
high-speed position loop. Each Logix controller can support up to 16
1756-HYD02 modules. Each 1756-HYD02 module can control up to two
axes.
The 1756-HYD02 module monitors the position feedback via the linear
displacement transducer (LDT) input and generates an analog command
reference for the valve to make sure that the actuator (cylinder) follows the
profile. The 1756-HYD02 module closes the position loop at a programmed
rate using position feedback as the input and produces a +/-10V analog
output velocity command.
10
The module is programmed with motion instructions in the RSLogix 5000
programming software and must be in the same chassis as the ControlLogix
controller that controls the module. If you distribute motion control that uses
the 1756-HYD02 module across different locations, place a ControlLogix
controller in each chassis that has a 1756-HYD02 module. In this case, use a
1756-SYNCH module to synchronize motion between the multiple chassis.
Transducers connected to the 1756-HYD02 must accept external
interrogation signals. In this case, the transducer generates its position
information each time that it receives an interrogation pulse. Do not use
transducers configured for internal interrogation because they will not be
properly synchronized to the module.
9Publication 1756-UM525A-EN-P - June 2003 9
Page 10
Chapter 1 What is the 1756-HYD02 Module?
Using A ControlLogix Hydraulic Servo Module in the ControlLogix System
A ControlLogix Hydraulic Servo module mounts in a ControlLogix chassis
and uses a removable terminal block (RTB) or interface module (IFM) to
connect all field-side wiring.
Before you install and use your module you should have already:
• installed and grounded a ControlLogix chassis and power supply. To
install these products, refer to the publications listed in on page 7.
• ordered and received an RTB or IFM and its components for your
application.
IMPORTANT
RTBs and IFMs are not included with your module purchase.
You must order them separately. For more information, contact
your local distributor or Rockwell Automation representative.
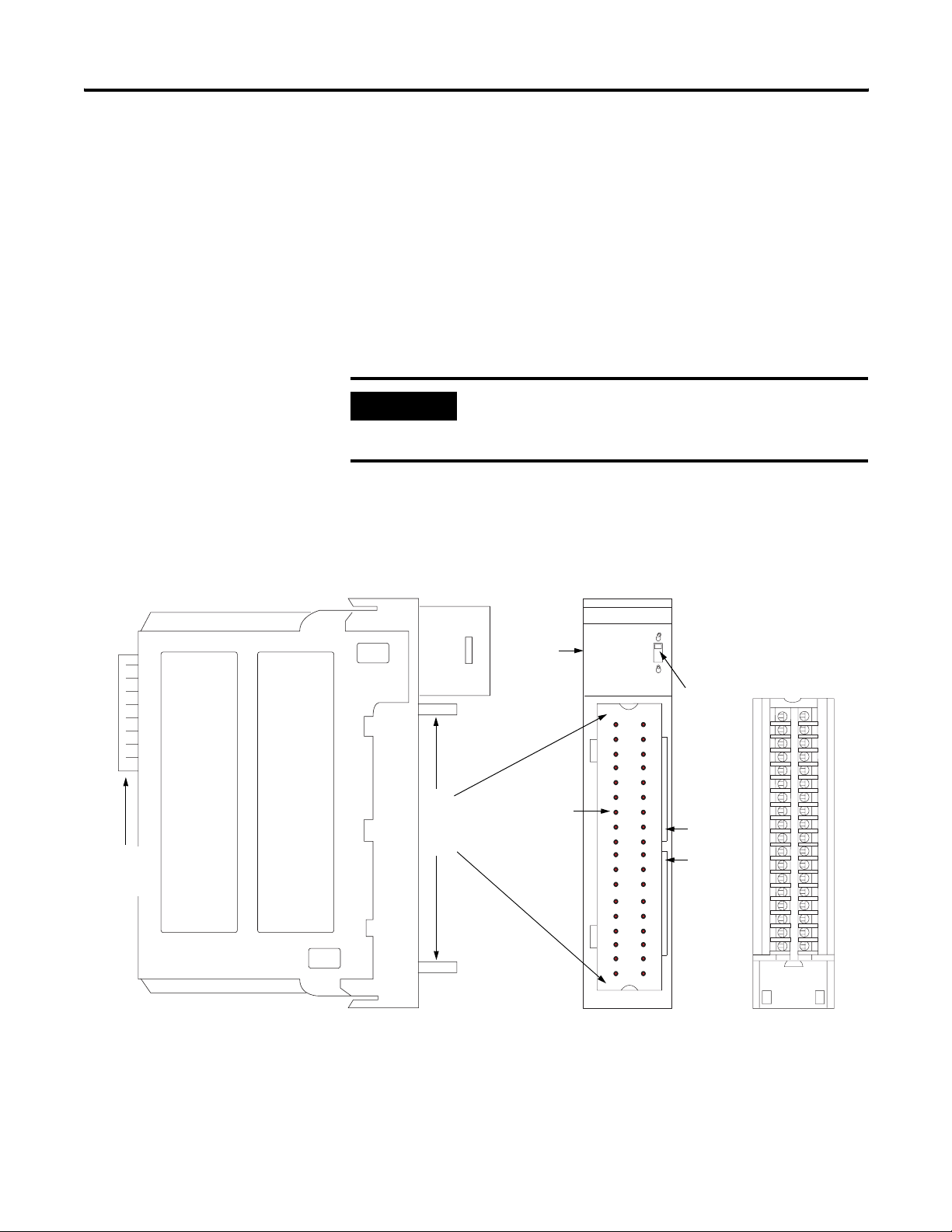
Physical Features of the ControlLogix Hydraulic Servo Module
ControlLogix
Backplane
Connector
Top and
bottom
guides
Indicators
Connector
pins
Removable
Terminal
Block
Locking tab
Slots for
keying the
RTB
41623
10 Publication 1756-UM525A-EN-P - June 2003
Page 11
What is the 1756-HYD02 Module? Chapter 1
The table below lists the physical features on the ControlLogix Hydraulic
Servo module.
ControlLogix Hydraulic Servo Module Physical Features
Feature: Description:
ControlLogix backplane
connector
Connectors pins Input/output and grounding connections are made to the
Locking tab The locking tab anchors the RTB on the module, maintaining
Slots for keying Slots mechanically key the RTB to prevent you from making
Status indicators Indicators display the status of communication, module
Top and bottom guides Guides provide assistance in seating the RTB onto the
The interface to the ControlLogix system; it connects the
module to the backplane.
module through these pins with the use of an RTB.
wiring connections.
the wrong wire connections to your module.
health and presence of input/output devices. Use these
indicators to help in troubleshooting.
module.
Certifying Agency Approvals
If the ControlLogix Hydraulic Servo module has obtained any agency
approvals, for example, CE/CSA/UL, the module label is marked as such.
Full Class I Division 2 Compliance
The ControlLogix Hydraulic Servo module maintains CSA Class I Division 2
system certification. The module can be placed in an environment other than
only 100% hazard free.
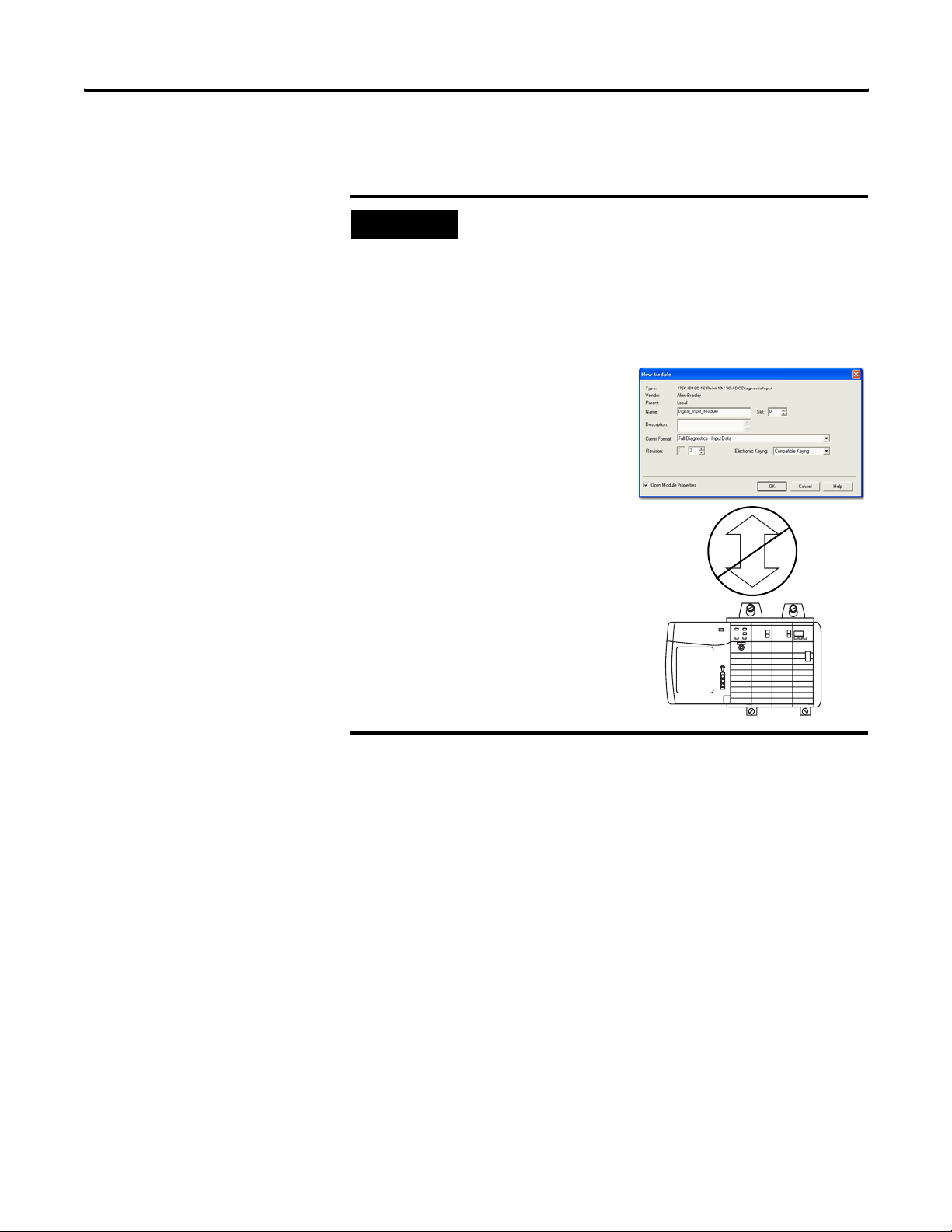
IMPORTANT
The 1756-HYD02 module should not be pulled under power, nor
should a powered RTB be removed, in a Class I Division 2
environment.
Publication 1756-UM525A-EN-P - June 2003 11
Page 12
Chapter 1 What is the 1756-HYD02 Module?
Preventing Electrostatic Discharge
Removal and Insertion Under Power
The 1756-HYD02 module is sensitive to electrostatic discharge.
ATTENTION
You can install or remove the module while chassis power is applied if you
observe the following precautions.
This equipment is sensitive to electrostatic discharge, which
can cause internal damage and affect normal operation. Follow
these guidelines when you handle this equipment:
• Touch a grounded object to discharge potential static.
• Wear an approved grounding wriststrap.
• Do not touch connectors or pins on component boards.
• Do not touch circuit components inside the equipment.
• If available, use a static-safe workstation.
• When not in use, store the equipment in appropriate static-safe
packaging.
Chapter Summary and What’s Next
WARNING
Repeated electrical arcing causes excessive wear to contacts on both the
module and its mating connector. Worn contacts may create electrical
resistance that can affect module operation.
We do not recommend removing and inserting the 1756-HYD02 module
while under power if the servo loop is closed. Make sure the servo loop is
open, that is, flashing green feedback indicator, before removing or inserting
the module under power.
In this chapter, you read a description of the 1756-HYD02 module. Chapter 2
describes
Installing the 1756-HYD02 Module
When you insert or remove the module while backplane power
is on, an electrical arc can occur. This could cause an explosion
in hazardous location installations. Be sure that power is
removed or the area is nonhazardous before proceeding.
However, as stated on the previous page, the 1756-HYD02
module should not be pulled under power, nor should a powered
RTB be removed, in a Class I Division 2 environment.
.
12 Publication 1756-UM525A-EN-P - June 2003
Page 13
Installing the 1756-HYD02 Module
Chapter
2
What This Chapter Contains
This chapter describes how to install the 1756-HYD02 module.
The 1756-HYD02 module mounts in a ControlLogix chassis and uses a
removable terminal block (RTB) to connect all field-side wiring.
Before you install your module, make sure you:
For information about: See page:
Installing the Module 14
Keying the Removable Terminal Block 15
Connecting Wiring 16
Assembling The Removable Terminal Block and
the Housing
Installing the Removable Terminal Block 26
Removing the Removable Terminal Block 28
Removing the Module from the Chassis 29
• install and ground a ControlLogix chassis and power supply.
• order and receive an RTB, and its components, for your application.
23
For more information on all the ControlLogix chassis and power supplies, see
Note the Power
the ControlLogix Selection Guide, publication
This module receives power from the 1756 chassis power supply and requires
two sources of power from the backplane:
1756-SG001
.
Requirements
• 700mA at 5.1V
• 2.5 mA at 24V
Add this current to the requirements of all other modules in this chassis to
prevent overloading the backplane power supply.
13Publication 1756-UM525A-EN-P - June 2003 13
Page 14
Chapter 2 Installing the 1756-HYD02 Module
Installing the Module
You can install or remove the module while chassis power is applied.
ATTENTION
The module is designed to support Removal and Insertion Under
Power (RIUP). However, when you remove or insert an RTB with
field-side power applied, unintended machine motion or
loss of process control can occur. Exercise extreme caution
when using this feature.
1. Align circuit board with top and bottom chassis guides.
Printed Circuit Board
20861-M
2. Slide module into chassis until module tabs ‘click’.
Locking Tab
20862-M
14 Publication 1756-UM525A-EN-P - June 2003
Page 15
Installing the 1756-HYD02 Module Chapter 2
Keying the Removable Terminal Block
Key the RTB to prevent inadvertently connecting the incorrect RTB to your
module. When the RTB mounts onto the module, keyed positions match up.
For example, if you place a U-shaped keying band in position #4 on the
module, you cannot place a wedge-shaped tab in #4 on the RTB or your RTB
will not mount on the module.
Use a unique keying pattern for each slot in the chassis.
1. Insert the U-shaped band with the long side near the terminals.
2. Push the band onto the module until it snaps in place.
U-shaped
Keying Band
20850-M
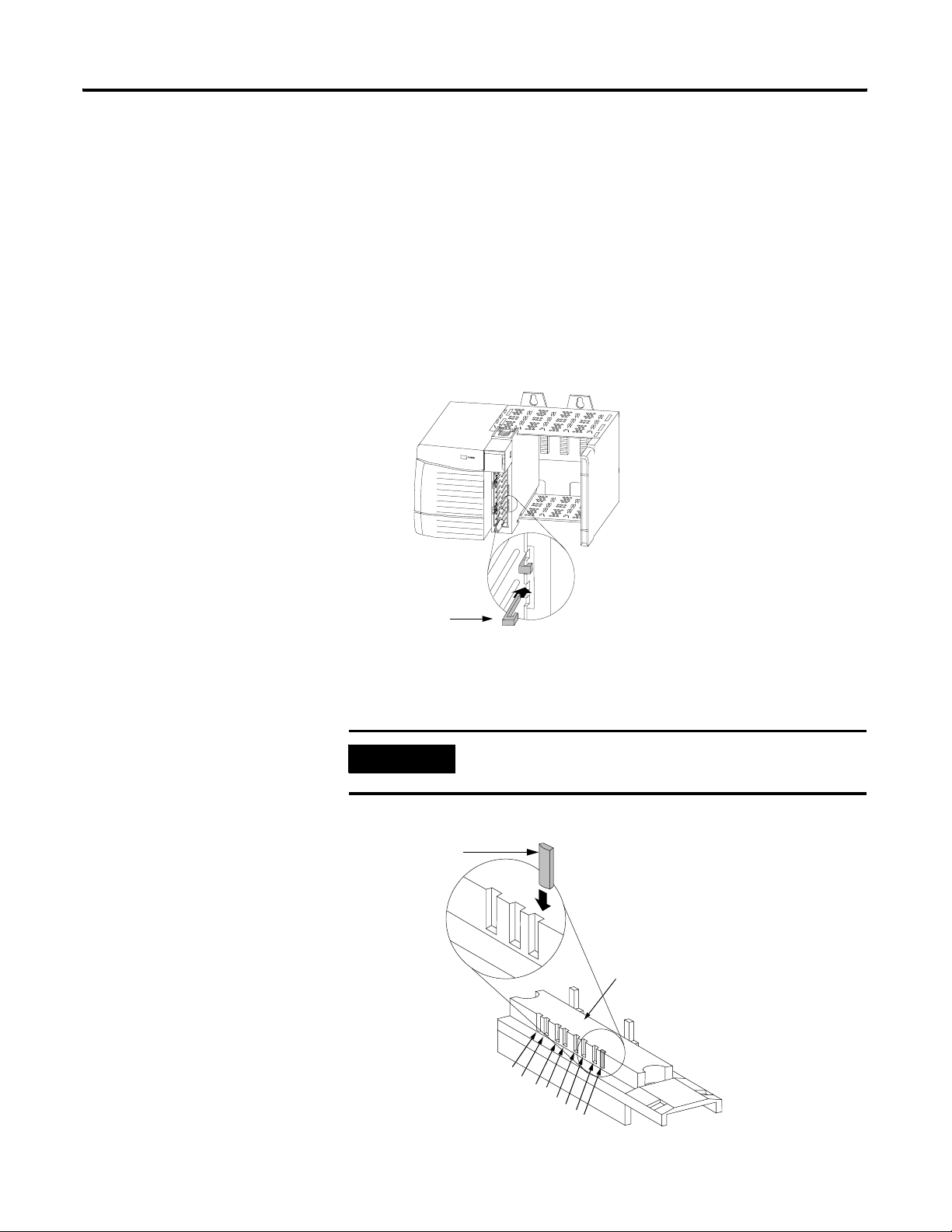
3. Key the RTB in positions that correspond to unkeyed module positions.
Insert the wedge-shaped tab on the RTB with the rounded edge first.
Push the tab onto the RTB until it stops.
IMPORTANT
When keying your RTB and module, you must begin with a
wedge-shaped tab in position #6 or #7.
Wedge–shaped
Keying Tab
Module side of RTB
0
1
2
3
4
5
6
7
Publication 1756-UM525A-EN-P - June 2003 15
20851–M
Page 16
Chapter 2 Installing the 1756-HYD02 Module
Connecting Wiring
This module uses an RTB or a Bulletin 1492 Interface Module (IFM)
(1)
to
connect all field-side wiring. Use an extended-depth cover (1756-TBE) for
applications with heavy gauge wiring or requiring additional routing space. The
maximum wire gauge that can be used with the 1756-HYD02 module is #14
AWG (2.08 sq. mm) stranded.
If you are using an RTB to connect wiring to you module, follow the directions
beginning below.
An IFM has been prewired before you received it. If you are using an IFM to
connect wiring to the module, consult the documentation that came with it to
connect wiring, skip this section and move to page 23.
Two Types of RTBs (each RTB comes with housing)
• Cage Clamp - Catalog number 1756-TBCH
• Spring Clamp - Catalog number 1756-TBSH or TBS6H
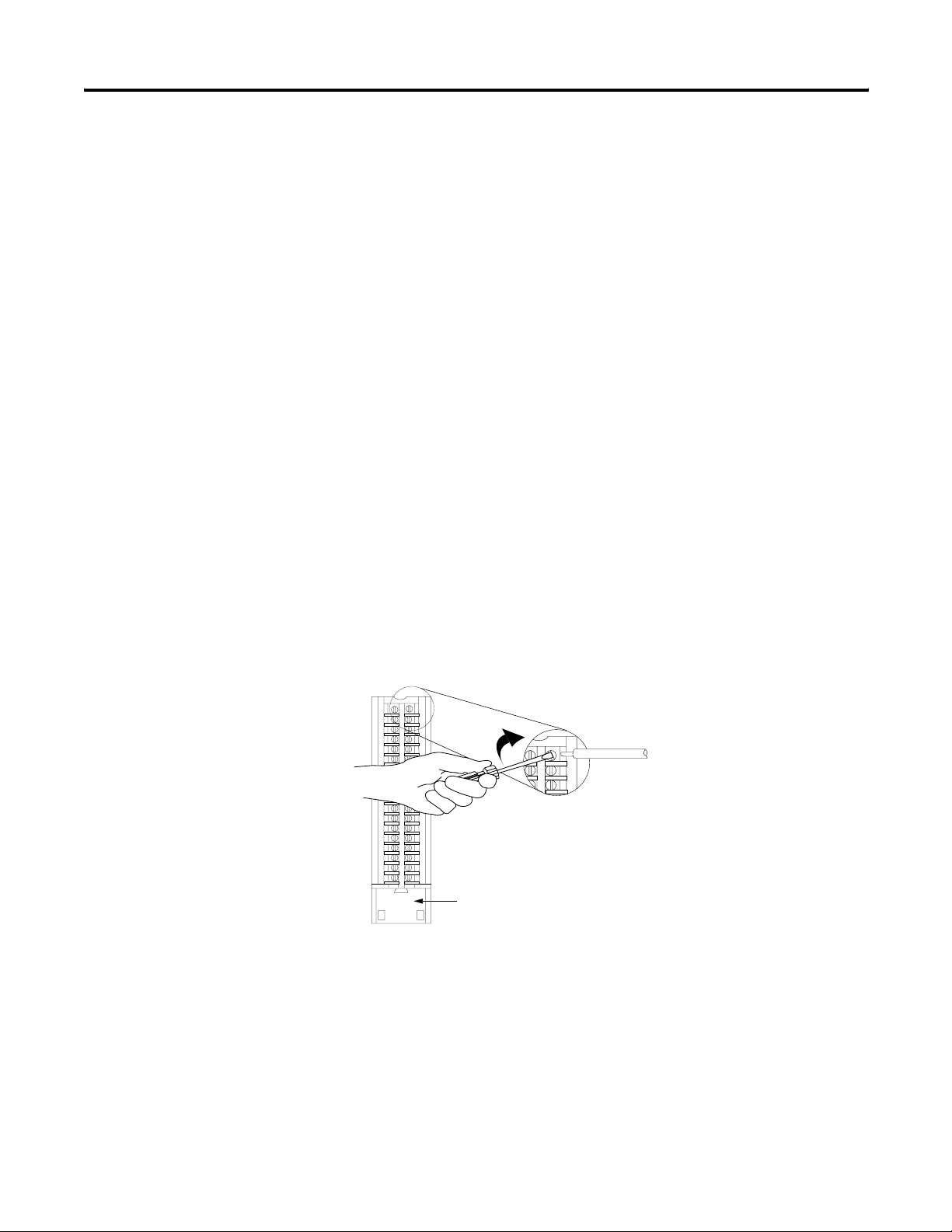
Cage Clamp
1. Insert the wire into the terminal.
2. Turn the screw clockwise to close the terminal on the wire.
Strain relief area
20859-M
(1)
The Bulletin 1492 IFM may not be used in any application that requires agency certification of the ControlLogix
system. Use of the IFM violates the UL, CSA and FM certifications of this product.
16 Publication 1756-UM525A-EN-P - June 2003
Page 17
Installing the 1756-HYD02 Module Chapter 2
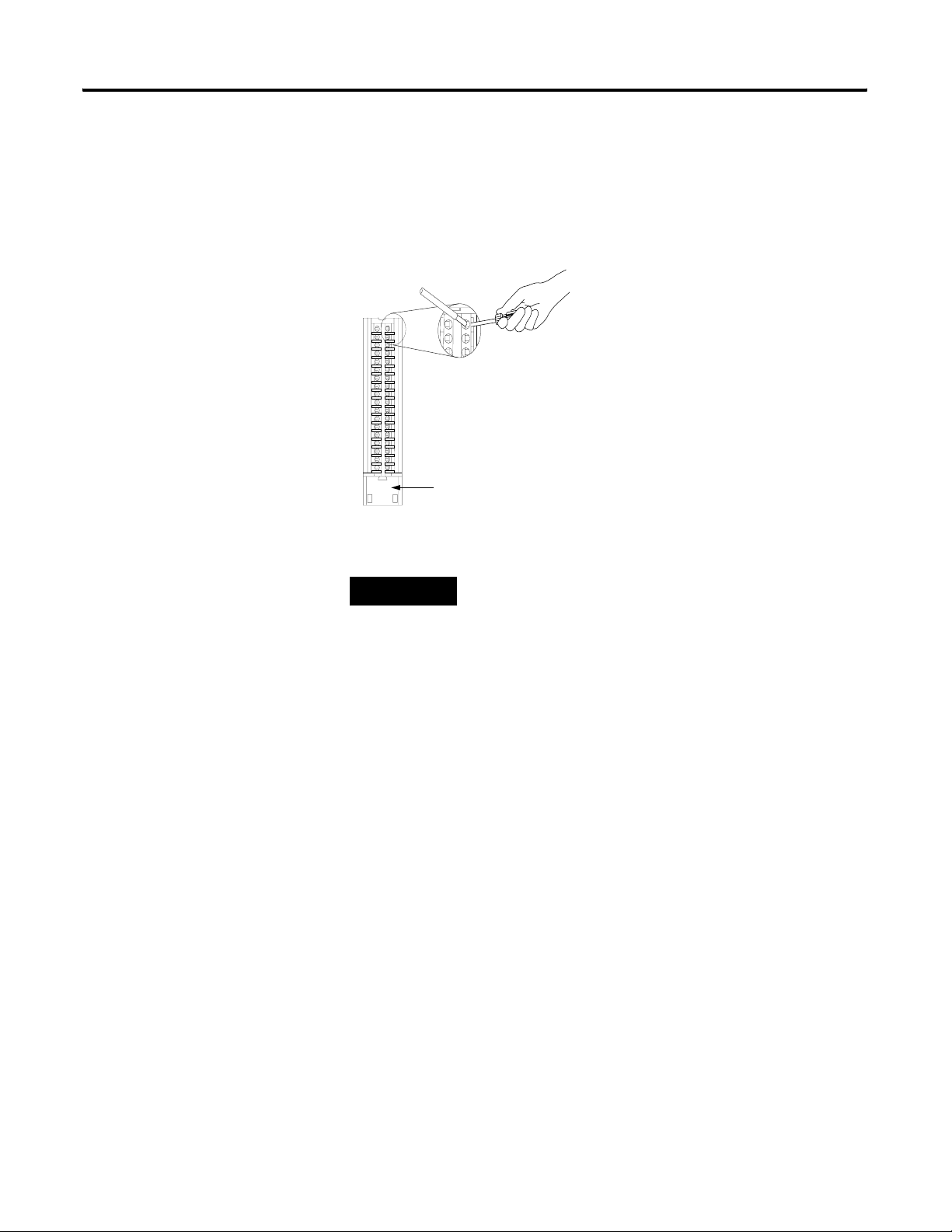
Spring Clamp
1. Insert the screwdriver into the outer hole of the RTB.
2. Insert the wire into the open terminal and remove the screwdriver.
Strain relief area
20860-M
Recommendations for Wiring Your RTB
TIP
Consider the following when wiring your RTB:
• Begin wiring the RTB at the bottom terminals and move up.
• Use a tie to secure the wires in the strain relief area of the RTB.
• The jumper bar part number is 97739201. Contact your local
Rockwell Automation sales representative to order additional
jumper bars, if necessary.
• Order and use an extended-depth housing, that is cat.
no.1756-TBE, for applications that require heavy gauge wiring. For
more information, see page 24.
Publication 1756-UM525A-EN-P - June 2003 17
Page 18
Chapter 2 Installing the 1756-HYD02 Module
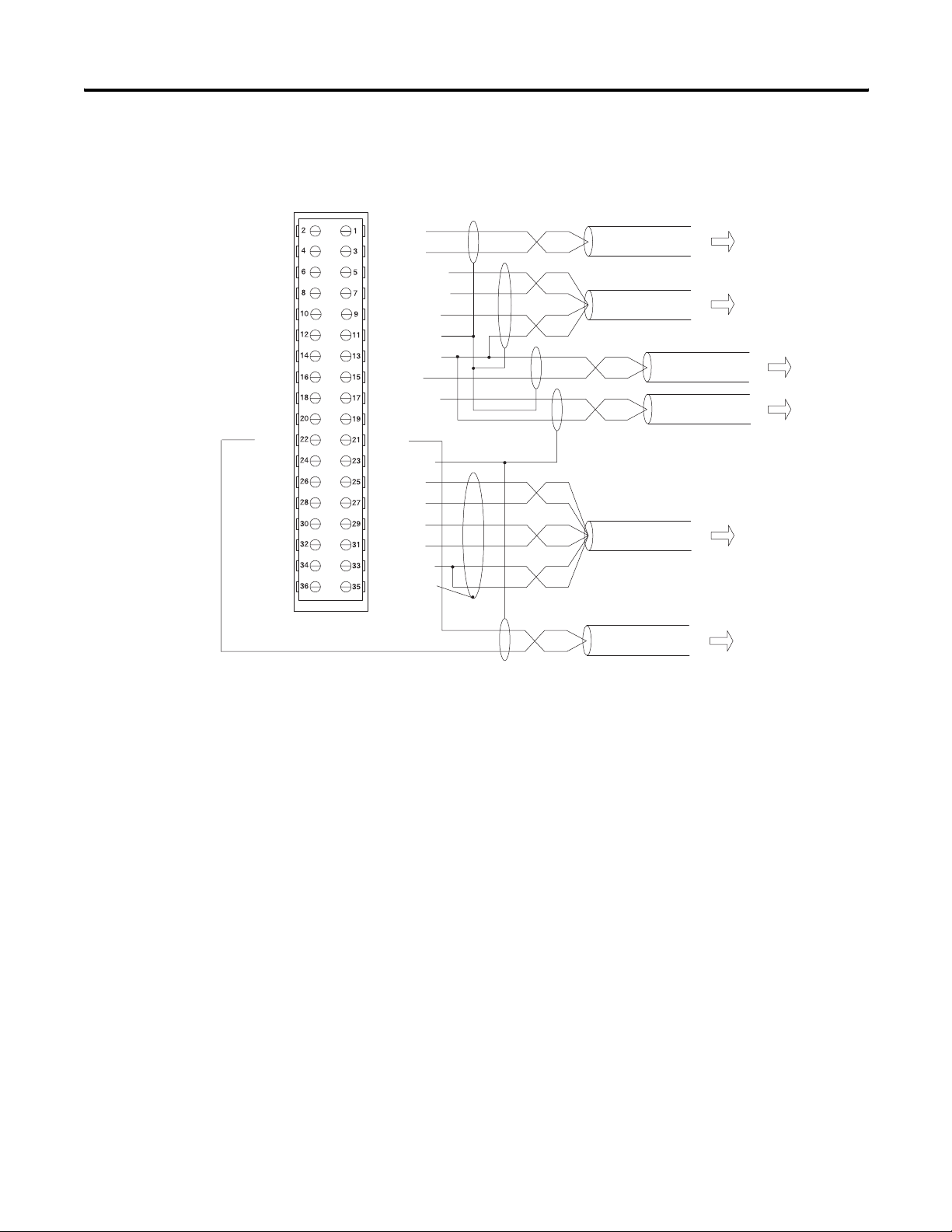
Wiring the 1756-HYD02 Module
+OUT-0
-OUT-0
+ENABLE-0
-ENABLE-0
DRVFLT-0
CHASSIS
IN_COM
HOME-0
REG24V-0
REG5V-0
CHASSIS
+INT-0
-INT-0
+RET-0
-RET-0
LDT CMN
CHASSIS
+OK
Use the wiring example in Figure to wire to your module.
+OUT-1
-OUT-1
+ENABLE-1
-ENABLE-1
DRVFLT-1
CHASSIS
IN_COM
HOME-1
REG24V-1
REG5V-1
-OK
CHASSIS
+INT-1
-INT-1
+RET-1
-RET-1
LDT CMN
CHASSIS
General cable C0720
General cable C0721
General cable C0720
General cable C0720
General cable C0722
To valve driver/amplifier
To hydraulic control unit
or
To valve or pump
To home
limit switch
To registration
sensor
To LDT
NOTES:
General cable C0720
1. This is a general wiring example illustrating Axis 1 wiring only. Other
configurations are possible with Axis wiring identical to Axis 1.
2. Make sure that any transducer connected to the 1756-HYD02 module
uses an external interrogation signal.
3. Do not exceed the specified isolation voltage between power sources.
To E-stop relay coil
43394
18 Publication 1756-UM525A-EN-P - June 2003
Page 19
From 1756-HYD02
Installing the 1756-HYD02 Module Chapter 2
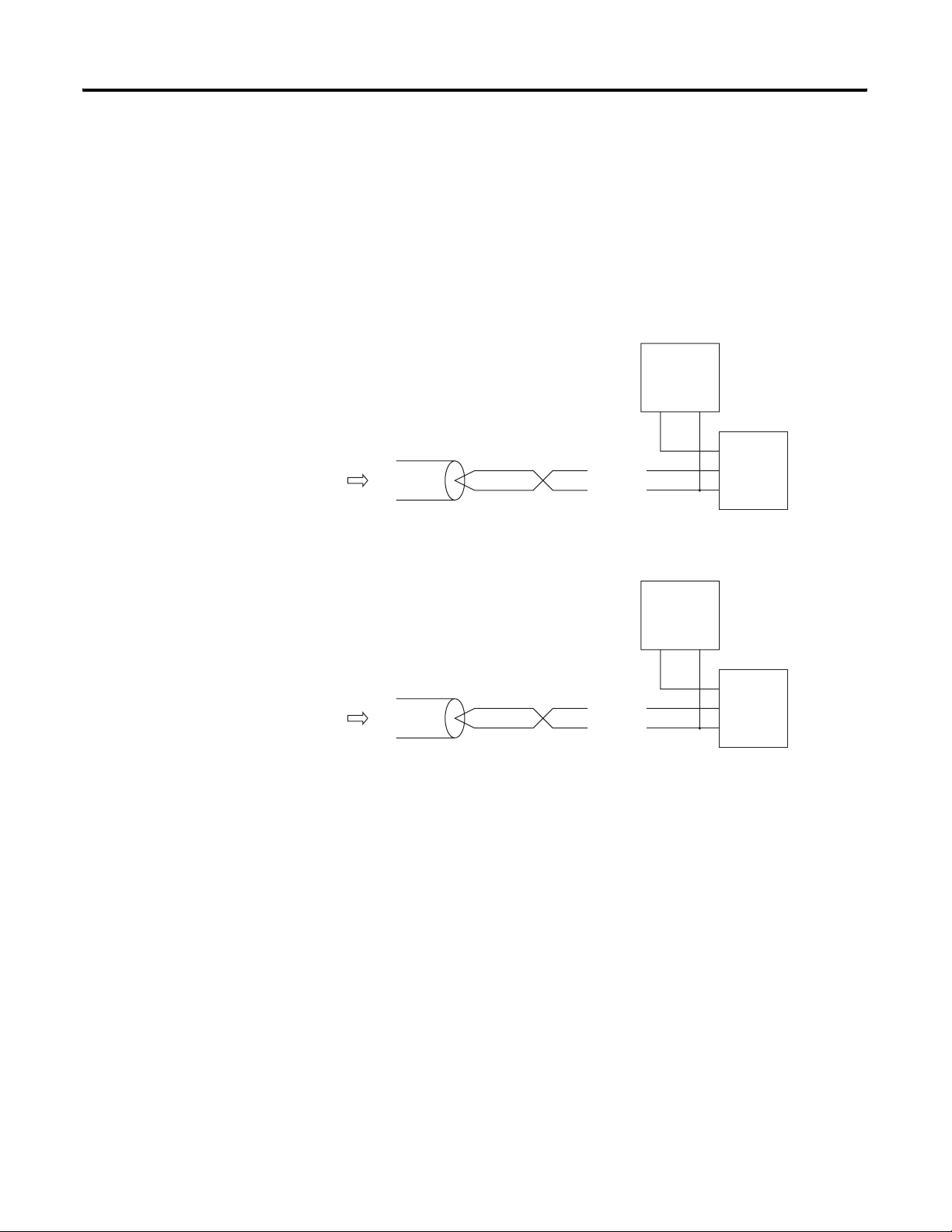
Wiring Registration Sensors
The registration inputs to the servo module can support 24V or 5V
registration sensors. These inputs should be wired to receive source current
from the sensor. Current sinking sensor configurations are not allowed
because the registration input common (IN_ COM) is shared with the other
24V servo module inputs.
- 24V Registration Sensor
24V dc
Field Power
General cable
C0720
REG24V
IN_COM
Supply
+
–
24 Volt
Registration
Sensor
Supply
Output
Common
43395
From 1756-HYD02
- 5V Registration Sensor
General cable
C0720
REG5V
IN_COM
5V dc
Field Power
Supply
+
–
5 Volt
Registration
Sensor
Supply
Output
Common
43395
Publication 1756-UM525A-EN-P - June 2003 19
Page 20
Chapter 2 Installing the 1756-HYD02 Module
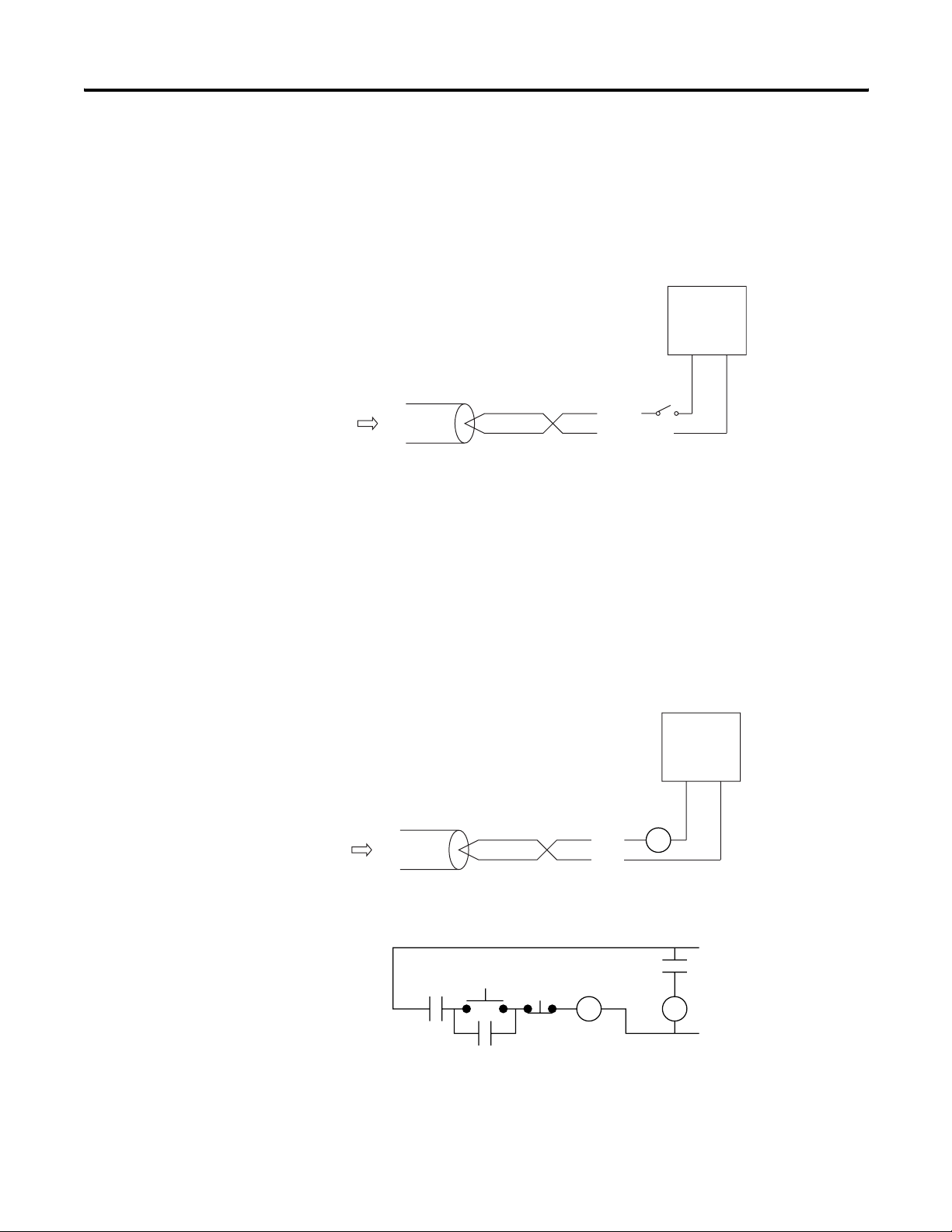
Wiring the Home Limit Switch Input
The home limit switch inputs to the servo module are designed for 24V
nominal operation. These inputs should be wired for current sourcing
operation.
24V dc
Field Power
Supply
+–
From 1756-HYD02
From 1756-HYD02
General cable
C0720
HOME
IN_COM
43396
Wiring the OK Contacts
A set of isolated solid- state OK relay contacts is provided for optional
interface to an E- stop string, which controls power to the associated pumps.
The OK contacts are rated to drive an external 24V pilot relay, for example,
Allen-Bradley 700-HA32Z24, whose contacts can be incorporated into the
E-Stop string.
24V dc
Field Power
Supply
+–
OK Pilot
Relay
General cable
C0720
+OK
-OK
43397
OK Pilot
Relay
Contacts
20 Publication 1756-UM525A-EN-P - June 2003
Start
CR1
Stop
CR1
CR1
M1
24V AC/DC
or 120VAC
typical
43398
Page 21

Installing the 1756-HYD02 Module Chapter 2
Connecting LDTs to Your Hydraulic Module
Because the number of LDTs that you can connect to your 1756-HYD02
module is continually changing, we cannot list all the available LDTs here.
Figure shows the connections for two example LDT types–Temposonic and
Balluff–that were available for connection to the 1756-HYD02 module at the
time of this printing.
+/-12V dc
Interrogate
Temposonics II,
RPM or DPM
Ground
Output Pulse
IMPORTANT
Remember, there are other suppliers with compatible LDTs.
Before connecting an LDT to your module, we recommend you
make sure it is the best available LDT for your application.
Also, when wiring an LDT to your module, always follow the
LDT manufacturer’s instructions on making connections.
24V Connections +/- 15V Connections
Interrogate (-)
+24V
Ground
Interrogate (+)
No shield connections on these examples
Pulse (-)
Output
Pulse (+)
Output
Table lists the LDT connections.
Balluff BTL type
+15V
-15V
Ground
Interrogate (-)
Interrogate (+)
Pulse (-)
Output
Pulse (+)
Output
43473
LDT Connections for Fabricating Your Own LDT Cable
Function
(1)
1756-HYD02 RTB Wiring (Numbers below
represent terminal numbers)
Temposonics II
RPM or DPM
(2)
Balluff
BTL type
Channel 0 Channel 1 24V dc +/- 15V dc
(+) Interrogate 26 25 9 - Yellow 1 - Yellow 1 - Yellow
(-) Interrogate 28 27 10 - Green 3 - Pink 3 - Pink
Power Supply N/A 5 - Red (+/-12V) 7 - Brown (+24V) 7 - Brown (+15V)
8 - White (-15V)
Ground 34 33 1 - White 6 - Blue
6 - Blue
8 - White
Output Pulse 30 (+)
32 (-)
(1)
(+) and (-) wires of the same function should be a twisted pair within the cable.
(2)
Do not connect to pins 2, 3, 4, 6 or 7
Publication 1756-UM525A-EN-P - June 2003 21
29 (+)
31 (-)
8 - Purple 2 - Gray (+)
5 - Green (-)
2 - Gray (+)
5 - Green (-)
Page 22
Chapter 2 Installing the 1756-HYD02 Module
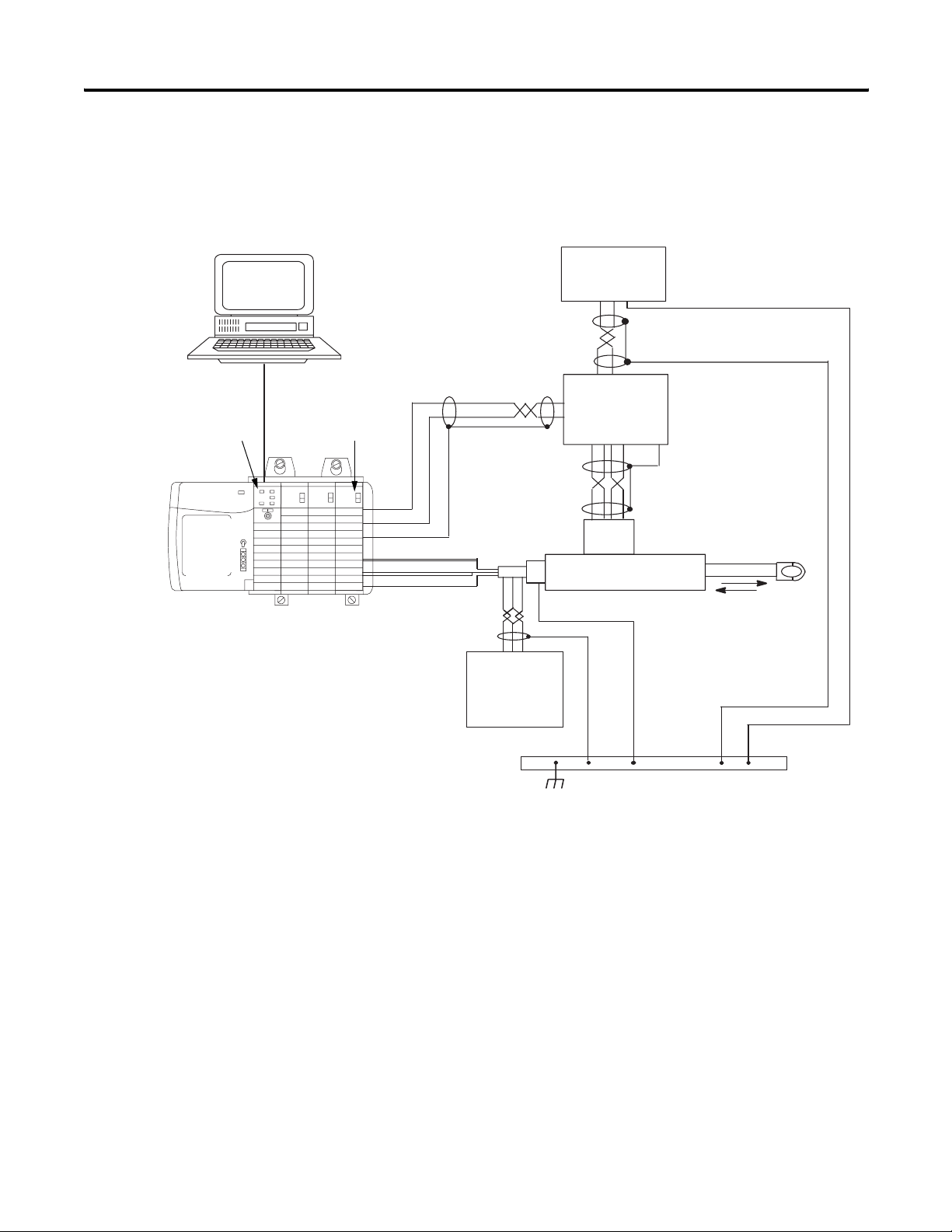
PC with
RSLogix 5000™
Figure shows an application wiring example using a 1-axis loop with a
differential LDT input. (The power supplies and servo amplifiers are
user-supplied.)
24V Power Supply
+–C
ControlLogix
controller
1756-HYD02
+ OUT
– OUT
CHASSIS
+INT & –INT
+RET & –RET
CHASSIS
Drive Output
+–C
+/– 15V dc
Power Supply
for LDTs
Servo or
Proportional
Amplifier
Valve
Piston-type Hydraulic
Cylinder and LDT
Earth Ground
IMPORTANT: This
module’s analog
output require an
external amplifier to
drive the valve.
43474
22 Publication 1756-UM525A-EN-P - June 2003
Page 23
Installing the 1756-HYD02 Module Chapter 2
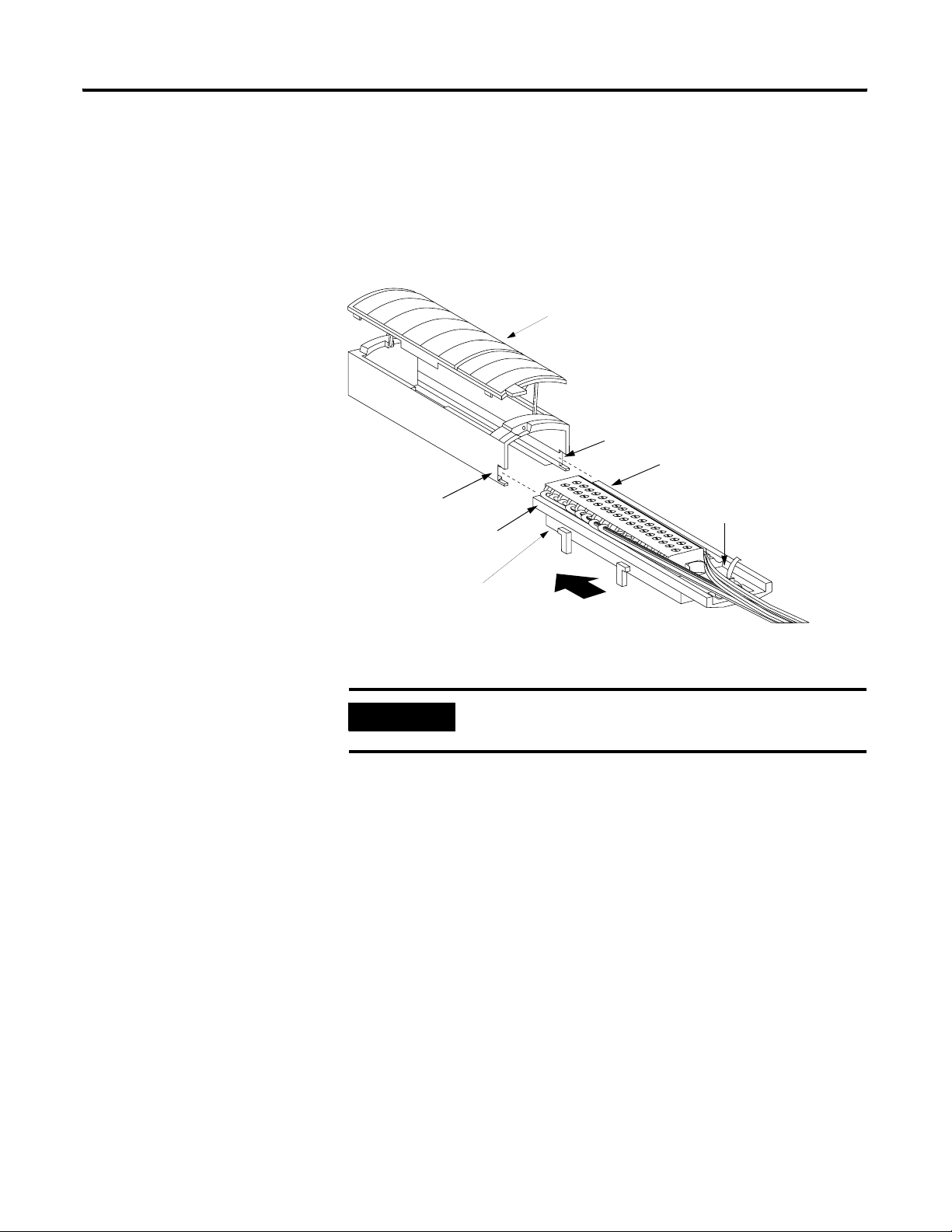
Assembling The Removable
Removable housing covers the wired RTB to protect wiring connections when
the RTB is seated on the module.
Terminal Block and the
Housing
1. Align the grooves at the bottom of each side of the housing with the
side edges of the RTB.
Housing
Groove
Side edge of RTB
Groove
Strain relief area
Side edge of RTB
RTB
2. Slide the RTB into the housing until it snaps into place.
IMPORTANT
If additional wire routing space is required for your application,
use extended-depth housing 1756-TBE.
20858-M
Publication 1756-UM525A-EN-P - June 2003 23
Page 24
Chapter 2 Installing the 1756-HYD02 Module
Choosing the Extended-Depth Housing
There are two housing options you must consider when wiring your
ControlLogix Hydraulic Servo module. When you order an RTB for your I/O
module, you receive a standard-depth housing with the RTB. If your
application uses heavy gauge wiring, you can order an extended-depth housing.
This housing does not come with an RTB.
You can use one of the housings listed below:
This housing: should be used with this RTB: and allows up to this
capacity of wires:
1756-TBCH Cage clamp 336 sq. mm
1756-TBS6H Spring clamp
1756-TBE Any RTB using heavy gauge wiring 628 sq. mm
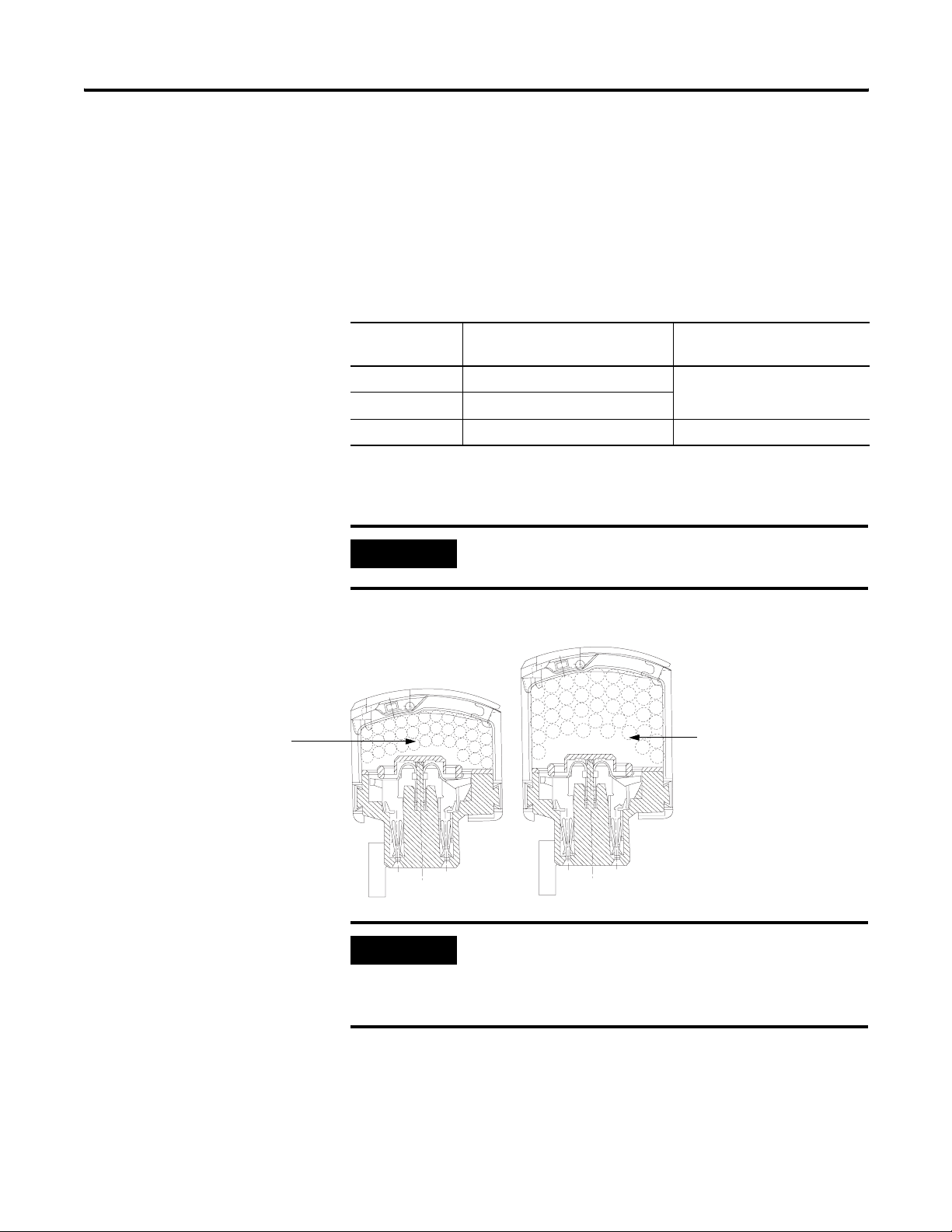
The figure below shows the difference, in terms of capacity, between the
housing options.
IMPORTANT
The housings shown are used with a spring clamp RTB, but the
capacity for each remains the same regardless of RTB type.
Maximum Area = 336 sq. mm
36 - 18AWG wires
23 - 14AWG wires
Standard-Depth Housing Extended-Depth Housing
IMPORTANT
The housings use the following maximum areas:
• standard-depth housing maximum area = 336 sq. mm
• extended-depth housing maximum area = 628 sq. mm
Maximum Area = 628 sq. mm
40 - 14AWG wires
30484-M
24 Publication 1756-UM525A-EN-P - June 2003
Page 25
Installing the 1756-HYD02 Module Chapter 2
Suggestions for Using the Extended-Depth Housing
12.7mm
(0.5in)
TIP
Consider the following when deciding to use an extended-depth
housing on your I/O module. It is recommended you use the 1756-TBE
when:
• using >36 18AWG wires
• using >23 14AWG wires
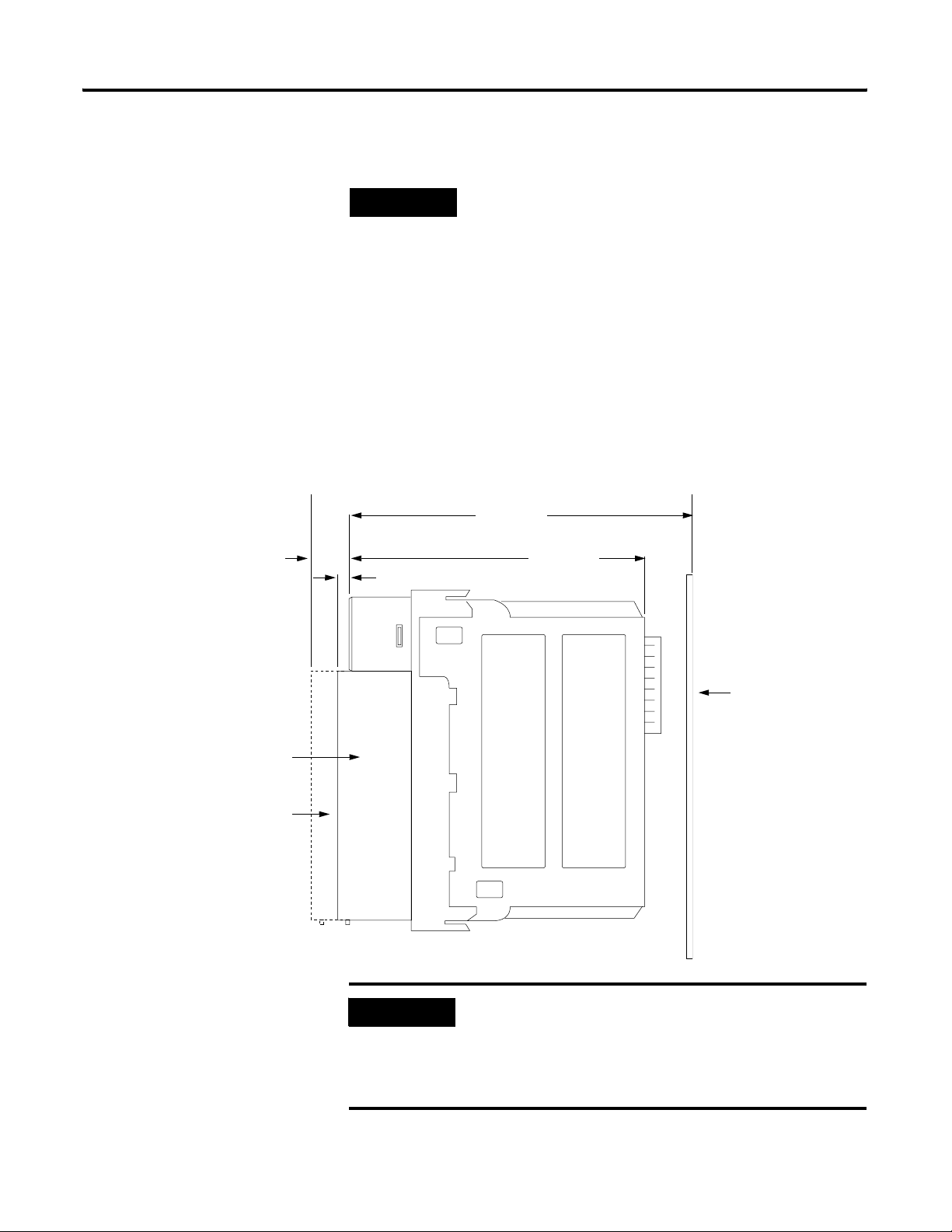
Cabinet Size Considerations With the Extended-Depth Housing
When you use an extended-depth housing (1756-TBE), the module depth is
increased. Figure shows the difference, in terms of depth, between a module
using a standard-depth housing and one using an extended-depth housing.
144.73mm
(5.698in)
131.75mm
3.18mm (0.125in)
(5.187in)
Standard-Depth Housing
Extended-Depth Housing
IMPORTANT
Rear Surface of
ControlLogix Chassis
41682
The depth from front of the module to the back of the chassis is
as follows:
• standard-depth housing = 147.91mm (5.823in)
• extended-depth housing = 157.43mm (6.198in)
Publication 1756-UM525A-EN-P - June 2003 25
Page 26
Chapter 2 Installing the 1756-HYD02 Module
Installing the Removable Terminal Block
Install the RTB onto the module to connect wiring.
ATTENTION
Shock hazard exists. If the RTB is installed onto the module
while the field-side power is applied, the RTB will be
electrically live. Do not touch the RTB’s terminals. Failure to
observe this caution may cause personal injury.
The RTB is designed to support Removal and Insertion Under
Power (RIUP). However, when you remove or insert an RTB with
field-side power applied, unintended machine motion or
loss of process control can occur. Exercise extreme caution
when using this feature. It is recommended that field-side
power be removed before installing the RTB onto the module.
Before installing the RTB, make certain:
• field-side wiring of the RTB has been completed.
• the RTB housing is snapped into place on the RTB.
• the RTB housing door is closed.
• the locking tab at the top of the module is unlocked.
1. Align the top, bottom and left side guides of the RTB with the guides on
the module.
Left side guides
Bottom guide
Top guide
20853-M
26 Publication 1756-UM525A-EN-P - June 2003
Page 27
Installing the 1756-HYD02 Module Chapter 2
2. Press quickly and evenly to seat the RTB on the module until the latches
snap into place.
Locking tab
20854-M
3. Slide the locking tab down to lock the RTB onto the module.
Publication 1756-UM525A-EN-P - June 2003 27
Page 28
Chapter 2 Installing the 1756-HYD02 Module
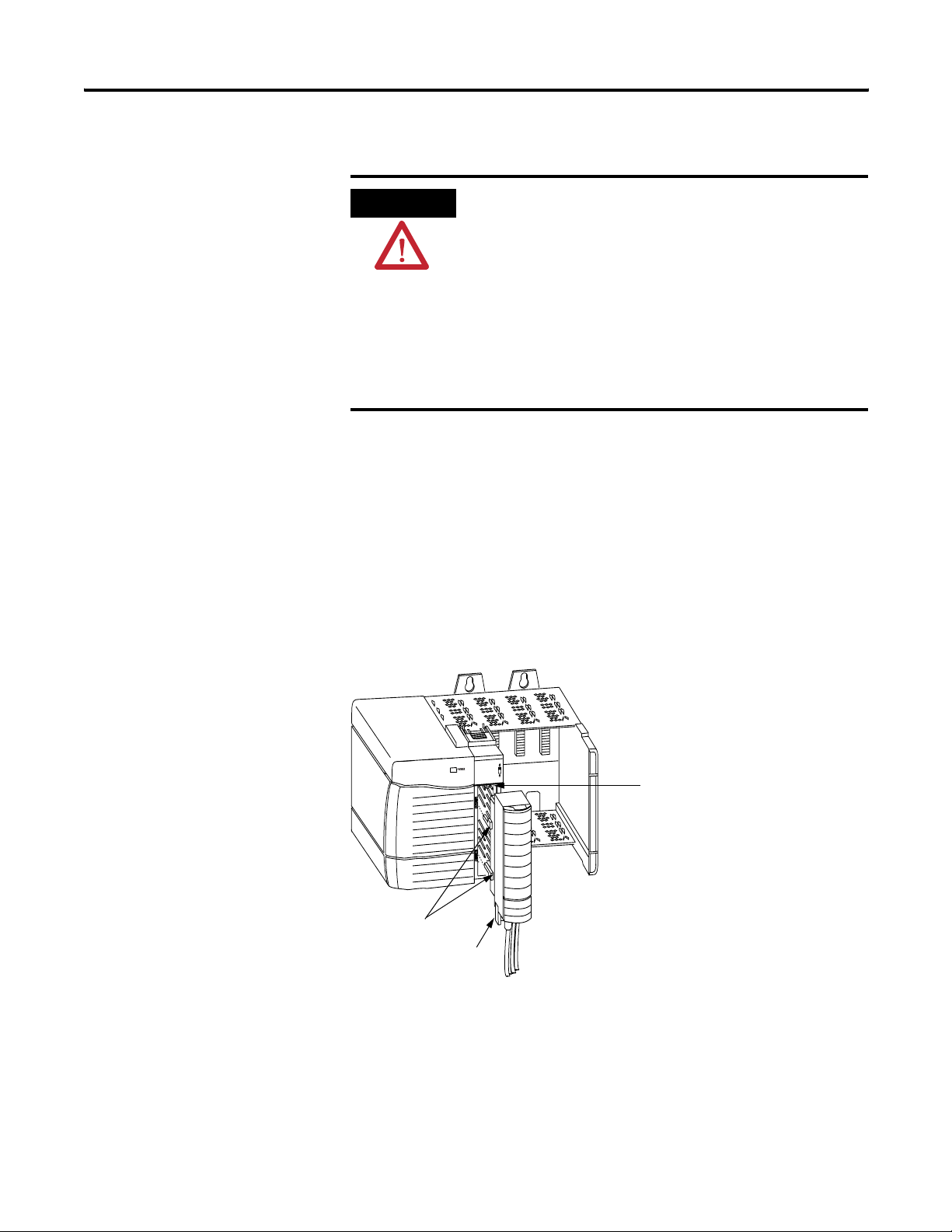
Removing the Removable Terminal Block
If you need to remove the module from the chassis, you must first remove the
RTB from the module.
ATTENTION
Shock hazard exists. If the RTB is removed from the module
while the field-side power is applied, the module will be
electrically live. Do not touch the RTB’s terminals. Failure to
observe this caution may cause personal injury.
The RTB is designed to support Removal and Insertion Under
Power (RIUP). However, when you remove or insert an RTB with
field-side power applied, unintended machine motion or
loss of process control can occur. Exercise extreme caution
when using this feature. It is recommended that field-side
power be removed before removing the module.
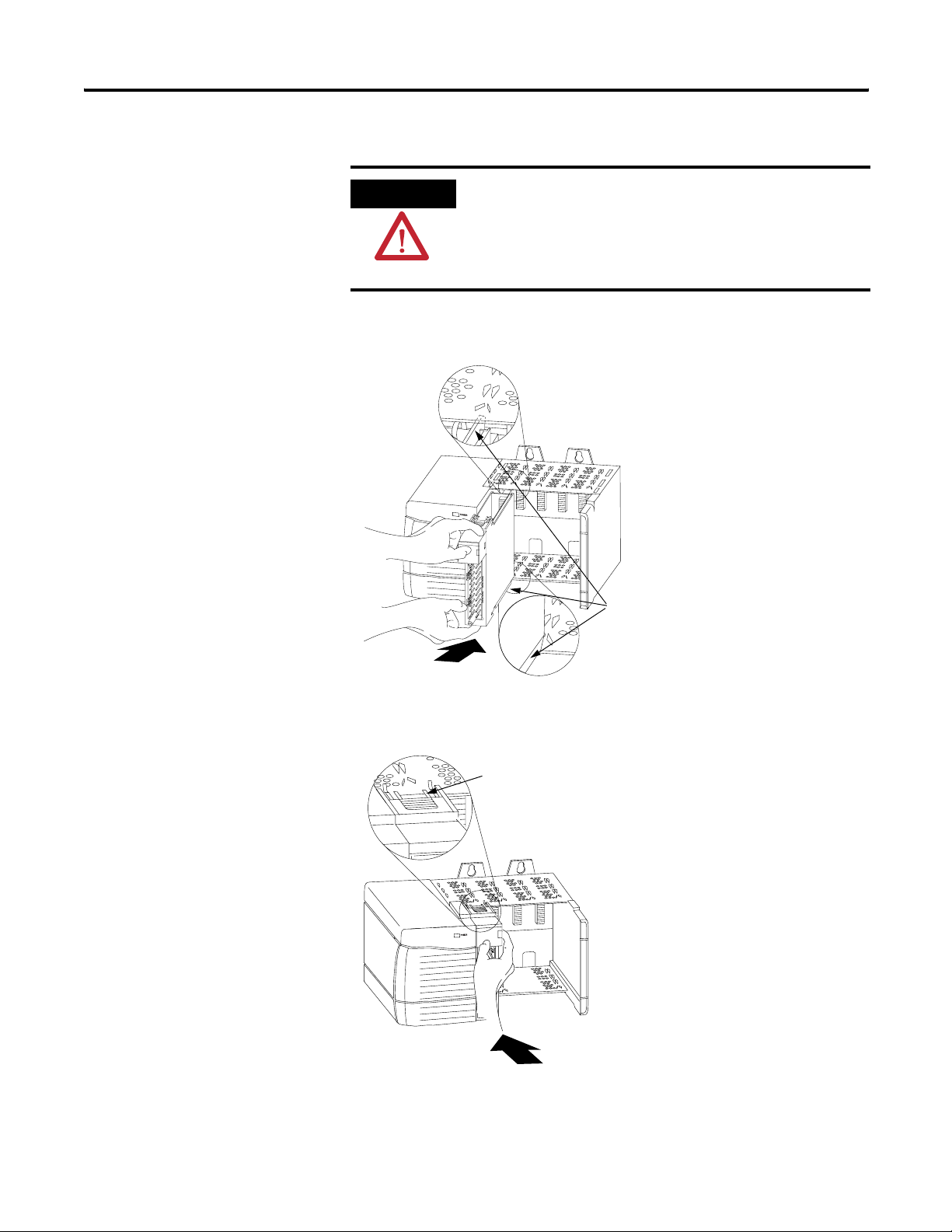
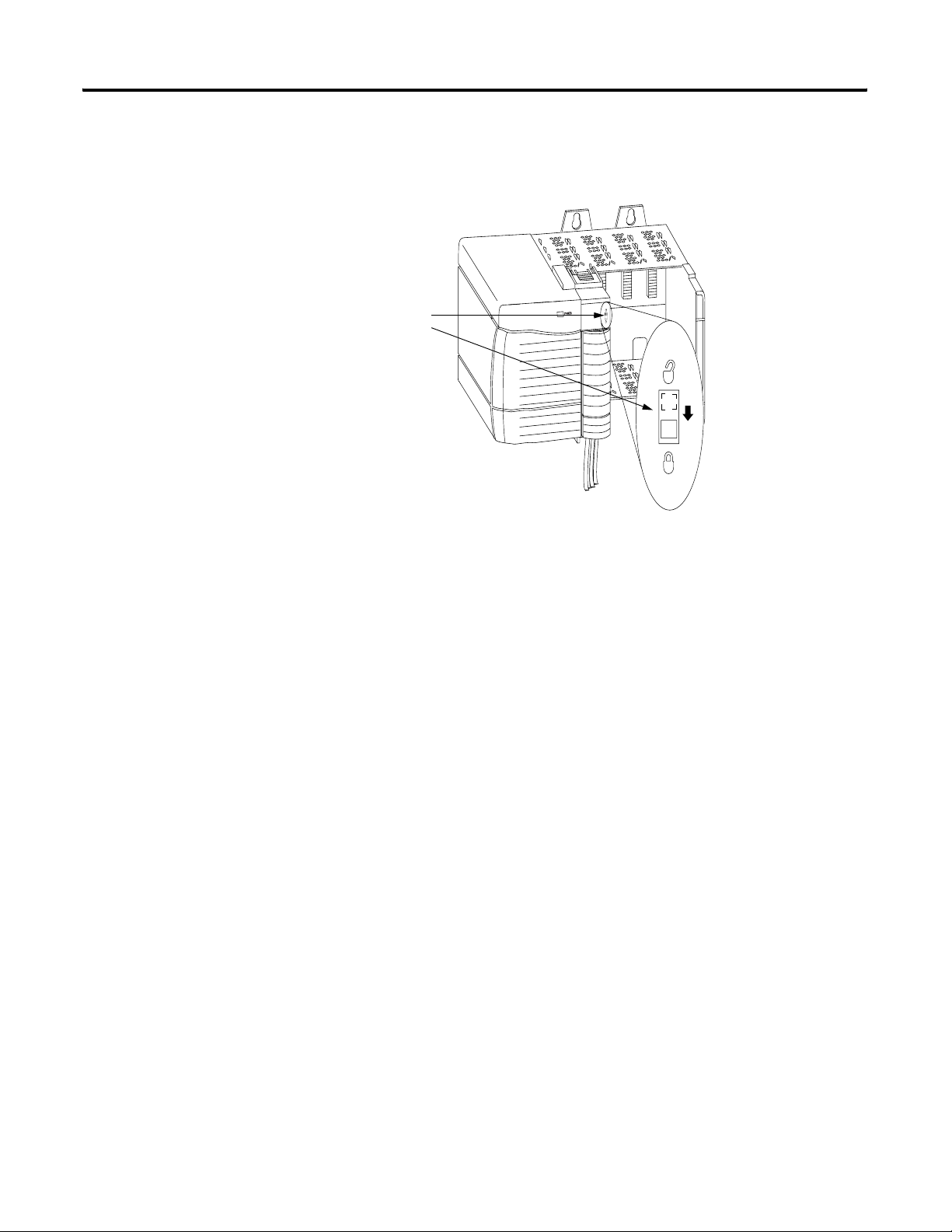
1. Unlock the locking tab at the top of the module.
2. Open the RTB door using the bottom tab.
3. Hold the spot marked PULL HERE and pull the RTB off the module.
IMPORTANT
Do not wrap your fingers around the entire door. A shock hazard
exists.
20855-M
28 Publication 1756-UM525A-EN-P - June 2003
Page 29
Installing the 1756-HYD02 Module Chapter 2
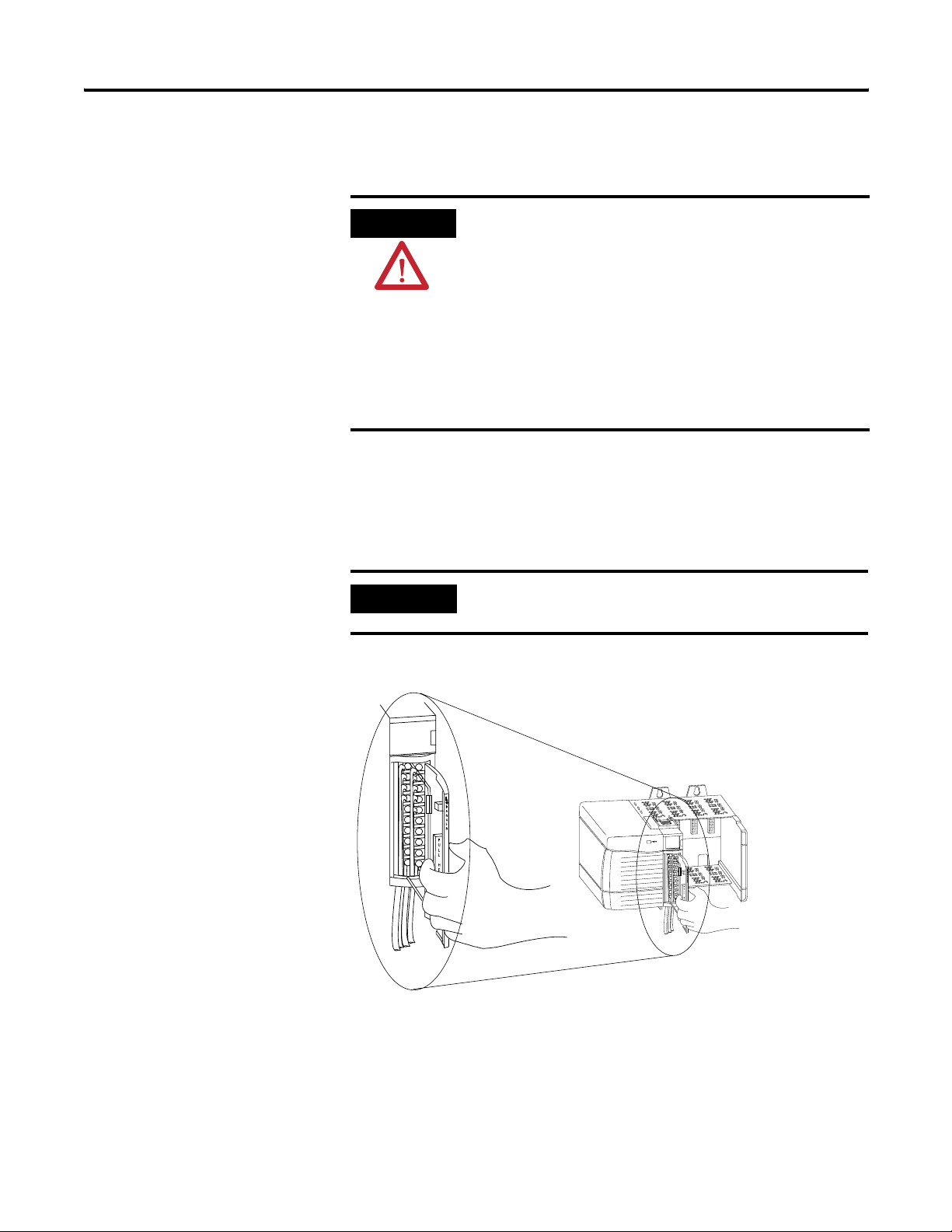
Removing the Module from the Chassis
Follow the steps below to remove the 1756-HYD02 module from the
ControlLogix chassis.
1. Push in the top and bottom locking tabs.
Locking tabs
20856-M
2. Pull module out of the chassis.
20857-M
Publication 1756-UM525A-EN-P - June 2003 29
Page 30

Chapter 2 Installing the 1756-HYD02 Module
Chapter Summary and What’s Next
In this chapter, you read about Installing the 1756-HYD02 Module. Chapter 3
explains Configuring the 1756-HYD02 Module.
30 Publication 1756-UM525A-EN-P - June 2003
Page 31

Chapter
Configuring the 1756-HYD02 Module
This chapter describes how to configure a ControlLogix Hydraulic Servo
module.
For information about: See page:
Overview of the Configuration Process 32
Creating a New Module 33
Configuring General Module Features 35
Configuring the Axes Features 36
Downloading New Configuration Data 37
Editing Configuration 38
Reconfiguring Module Parameters in Run Mode 39
3
Using RSLogix 5000 Configuration Software
Reconfiguring Module Parameters in Program
Mode
You must configure your module upon installation. The module does not
work until it has been configured.
IMPORTANT
Use RSLogix 5000 software, version 12 or greater, to configure your
ControlLogix Hydraulic Servo module.
The ControlLogix Hydraulic Servo module can only be used in a
local chassis.
39
31Publication 1756-UM525A-EN-P - June 2003 31
Page 32

Chapter 3 Configuring the 1756-HYD02 Module
Overview of the Configuration Process
Figure shows an overview of the configuration process.
New Module
1. Select the
Hydraulic Servo
module.
2. Choose a Major
Revision
General Tab
Name
Description
Slot number
Comm. format
Minor revision
Keying choice
Make custom
configuration
choices here
Application
Specific
Screens
Edit a module’s
configuration here
Configuration complete
Pop-up menu
leads to a
module’s
configuration
properties
A series of tabs in RSLogix 5000
provide access to change a
module’s configuration data
43466
32 Publication 1756-UM525A-EN-P - June 2003
Page 33

Configuring the 1756-HYD02 Module Chapter 3
Creating a New Module
Use this pull-down menu
to go offline
After you have started RSLogix 5000 and created a controller, you must create
a new module. The wizard allows you to create a new module and configure it.
IMPORTANT
You must be offline when you create a new module.
1. If your application is online, go offline.
2. Access the Select Module Type screen.
A. Select I/O Configuration.
B. Right-click to see the menu.
C. Select New Module.
Publication 1756-UM525A-EN-P - June 2003 33
Page 34

Chapter 3 Configuring the 1756-HYD02 Module
A. Select the Hydraulic
Servo module
3. Select the module type.
B. Make sure the
Major Revision
number matches
the label on the
side of your module
C. Click here.
4. Begin configuration on the naming screen.
A. Name the module.
B. Add a description (optional).
C. Make sure the Minor
Revision number matches
the label on the side of your
module.
If you are altering the
default configuration,
click here.
Go to page 35.
E. Select the slot in which
your module resides.
F. Choose an Electronic
Keying method. A detailed
explanation of this field is
provided on page 44.
If you are using default
configuration, click here and you are
finished configuring your module.
Go to page 37.
34 Publication 1756-UM525A-EN-P - June 2003
Page 35

Configuring the 1756-HYD02 Module Chapter 3
Configuring General Module Features
Inhibit the connection to the module
If you want a Major Fault on the Controller to
occur if there is connection failure with the I/O
module while in Run mode, click here
This Fault box is empty when you are offline. If
a fault occurs while the module is online, the
type of fault will be displayed here
You see the series of wizard screens after the naming screen. Use these screens
to configure general features on the 1756-HYD02 module.
Click here to move to the next page
Set the Servo Update Period – The correct
servo update period is based on the
transducer lengths and the number of
recirculations on each axis associated with
the module. The Feedback tab, described on
page 58, has a utility that calculates the
minimum update period.
For more information on the Associated
Axes, see the Configuring the Axes Features
beginning on page 36.
Publication 1756-UM525A-EN-P - June 2003 35
Page 36

Chapter 3 Configuring the 1756-HYD02 Module
Configuring the Axes Features
Click on New Axis to create a new axis tag that
will contain the axis data. The New Tag pop-up
screen appears, as shown below.
You must create an axis before you can associate it with a channel on the
1756-HYD02 module.
1. Create the new axis tag as shown below.
The new axis tag must be:
² named
² of the AXIS_SERVO data type
² of the controller scope
A. Associate the channel(s) with the new
axis tag.
B. Click on the ellipsis (. . .) to access the
axis properties wizard.
2. Access the axis properties as shown below.
36 Publication 1756-UM525A-EN-P - June 2003
Page 37

Click on the necessary tab and make changes to
the axis properties.
Configuring the 1756-HYD02 Module Chapter 3
3. Configure the axis properties on the wizard screens that appear. The
General screen is shown below.
For a full description of all the configurable features available on the
Axis properties wizard, see the Using Axes Features section beginning
on page 52.
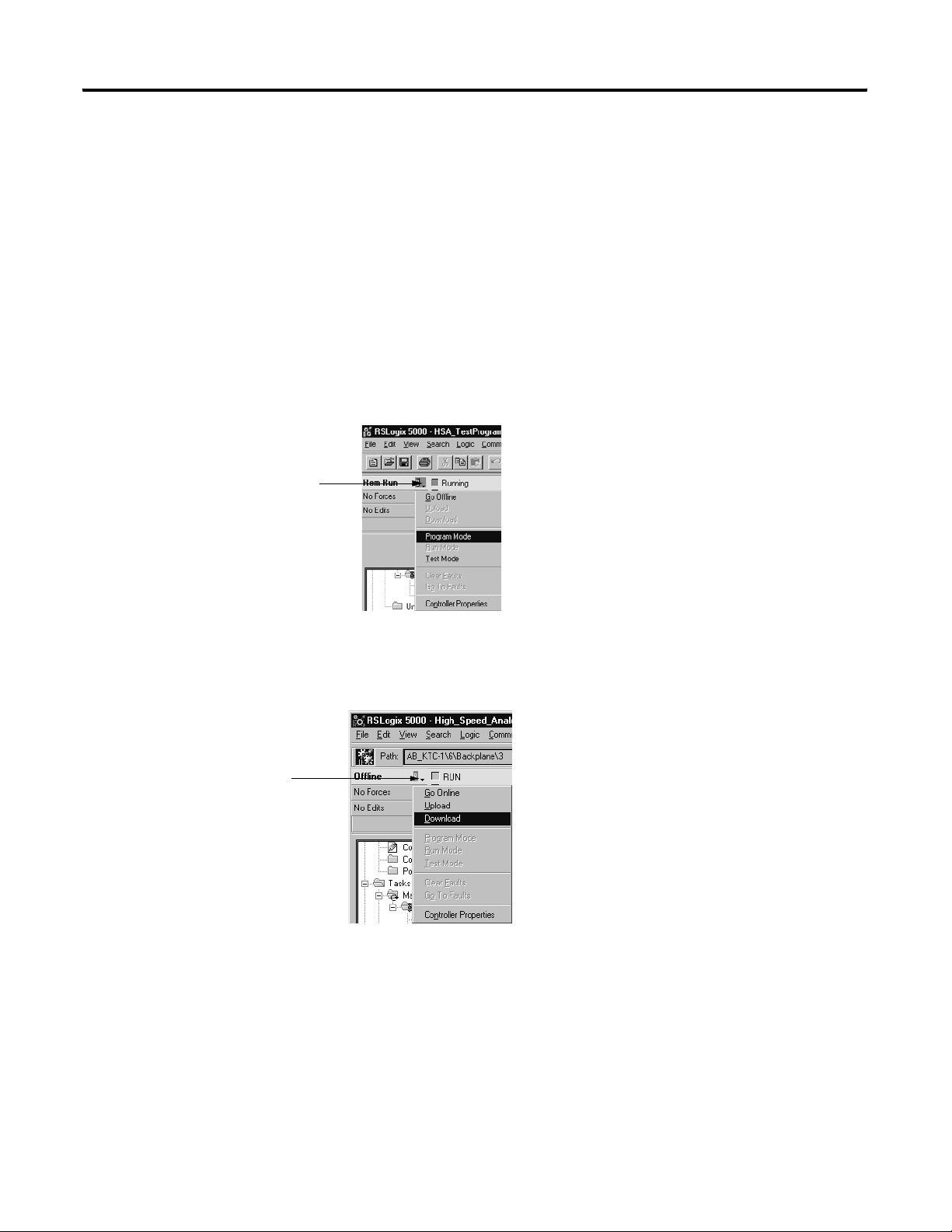
Downloading New Configuration Data
Use this pull-down
menu to download the
new configuration.
After you have changed the configuration data for a module, the change does
not actually take effect until you download the new program which contains
that information. This downloads the entire program to the controller
overwriting any existing programs.
This completes the download process.
Publication 1756-UM525A-EN-P - June 2003 37
Page 38

Chapter 3 Configuring the 1756-HYD02 Module
Editing Configuration
After you set configuration for a module, you can review and change it. You
can change configuration data and download it to the controller while online.
This is called dynamic reconfiguration.
Your freedom to change some configurable features, though, depends on
whether the controller is in Remote Run mode or Program mode.
IMPORTANT
Although you can change configuration while online, you must
go offline to add or delete modules from the program.
The editing process begins on the main page of RSLogix 5000.
A. Right-click on the 1756-HYD02
module.
B. Select Properties.
C. Click on the tab of the page you
want to view or reconfigure.
38 Publication 1756-UM525A-EN-P - June 2003
Page 39
Configuring the 1756-HYD02 Module Chapter 3
Reconfiguring Module Parameters in Run Mode
Reconfiguring Module Parameters in Program Mode
Use this pull-down menu to
switch to Program mode
Your module can operate in Remote Run mode or Hard Run mode. You can
only change any configurable features that are enabled by RSLogix 5000 in
Remote Run mode.
If any feature is disabled in either Run mode, change the controller to Program
mode and make the necessary changes.
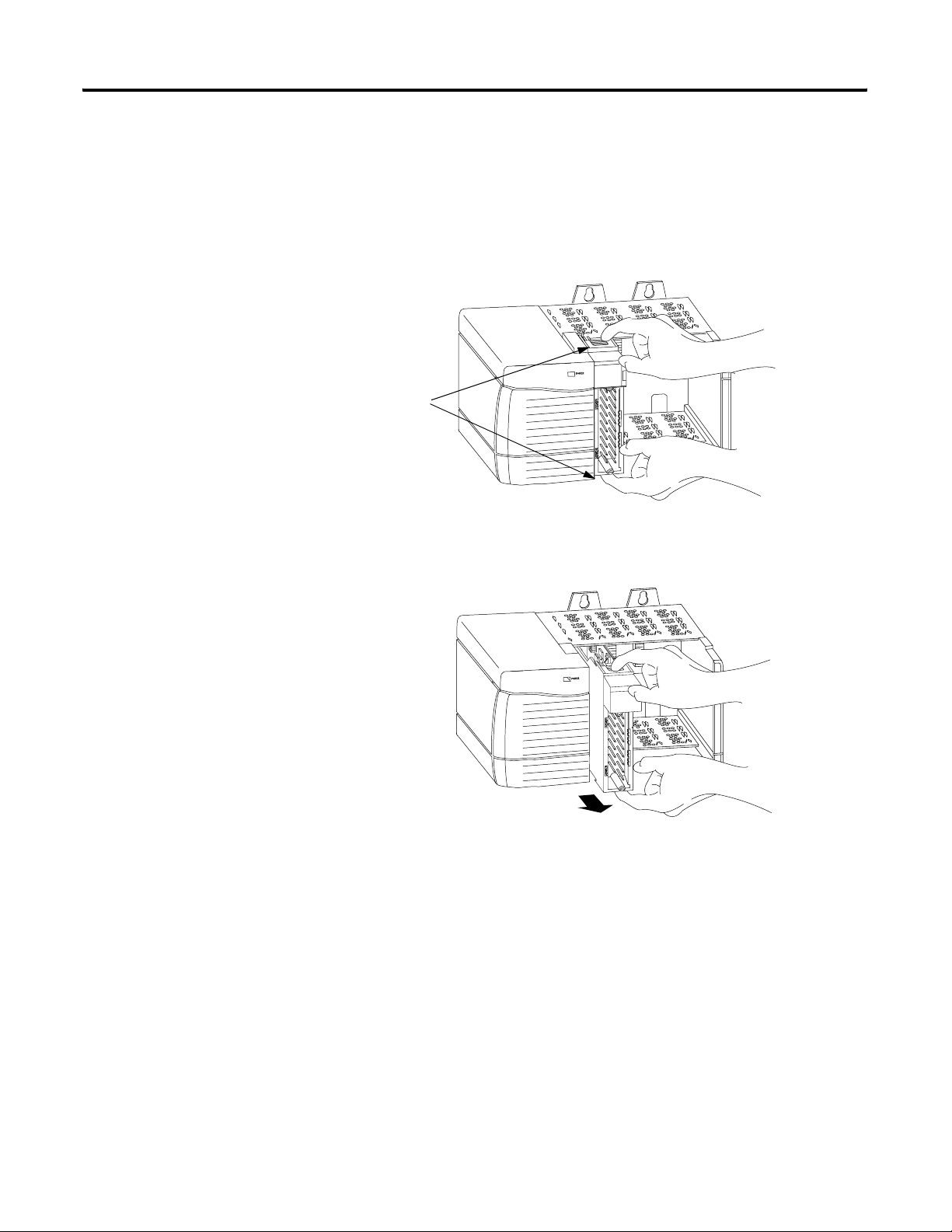
Follow these steps to change configuration in Program mode.
1. Make sure the module is in Program Mode.
Use this pull-down
menu to download the
new configuration.
2. Make any necessary changes.
3. Download the new configuration.
4. Return to Run Mode, if necessary.
Publication 1756-UM525A-EN-P - June 2003 39
Page 40
Chapter 3 Configuring the 1756-HYD02 Module
Chapter Summary and What’s Next
In this chapter you read about:
• configuring ControlLogix Hydraulic Servo modules
• editing module configuration
• configuration tags
Chapter 4 explains
Using the 1756-HYD02 Module Features
.
40 Publication 1756-UM525A-EN-P - June 2003
Page 41
Chapter
Using the 1756-HYD02 Module Features
This chapter describes the 1756-HYD02 module’s configurable features.
For more information about: See page:
What This Chapter Contains 42
Using General Module Features 42
Servo Update Period 42
Module Fault Reporting 43
Fully Software Configurable 43
Electronic Keying 44
Using Axes Features 52
4
General Tab 52
Motion Planner Tab 54
Units Tab 56
Servo Tab 57
Feedback Tab 58
Conversion Tab 59
Homing Tab 60
Hookup Tab 62
Tune Tab 63
Dynamics Tab 64
Gains Tab 65
Output Tab 68
Limits Tab 70
Offset Tab 72
Fault Actions Tab 74
Tag Tab 76
41Publication 1756-UM525A-EN-P - June 2003 41
Page 42

Chapter 4 Using the 1756-HYD02 Module Features
What This Chapter Contains
Using General
This chapter is broken into the two sections.
The general module features include:
Module Features
Section: Description: Begins on
page:
Using General Module Features
Using Axes
Features
This section describes features that affect the
module in a general sense. For example, the
1756-HYD02 module offers electronic keying
options that you can configure to set the degree of
protection your application needs against using
the wrong 1756-HYD02 module.
This section describes features that are specific to
the axes connected to channels 0 and 1 on the
1756-HYD02 module.
42
52
•Servo Update Period
• Module Fault Reporting
• Fully Software Configurable
• Electronic Keying
Servo Update Period
Servo update period is the period at which the position feedback is sampled
and the loop is closed to generate a new output value. The time of this period
is a user-defined setting. You can choose from one of the following settings:
•250μs
•500μs
• 1000μs
• 1500μs
• 2000μs
With LDTs, the minimum Servo Update Period is dependent on the length of
the transducer. Use the Calculated Values tool on the Feedback tab of the Axis
properties dialog in RSLogix 5000, in conjunction with the response of your
hydraulic application, to calculate suggested minimum update periods. The
coarse update period of the associated motion group must be at least 3x the
maximum configured 1756-HYD02 module servo update period or
RSLogix 5000 will generate an error.
42 Publication 1756-UM525A-EN-P - June 2003
Page 43

Using the 1756-HYD02 Module Features Chapter 4
Module Fault Reporting
The 1756-HYD02 module provides hardware and software indication when a
module fault has occurred. The module’s LED fault indicator and the RSLogix
5000 programming software graphically display faults; the software also offers
a message describing the nature of the fault. This feature allows you to
determine how your module has been affected and what action should be
taken to resume normal operation.
For more information on using RSLogix 5000 to troubleshoot your module,
see Chapter 5, Troubleshooting the 1756-HYD02 Module.
Fully Software Configurable
The RSLogix 5000 software offers a custom, easily understood interface for
users to write configuration. All module features are enabled or disabled
through the configuration portion of the software.
You can also use the software to interrogate any module in the system to
retrieve
• serial number
• revision information
• catalog number
• vendor identification
• error/fault information
• diagnostic counters.
By eliminating such tasks as setting hardware switches and jumpers, the
software makes module configuration easier and more reliable.
Publication 1756-UM525A-EN-P - June 2003 43
Page 44
Chapter 4 Using the 1756-HYD02 Module Features
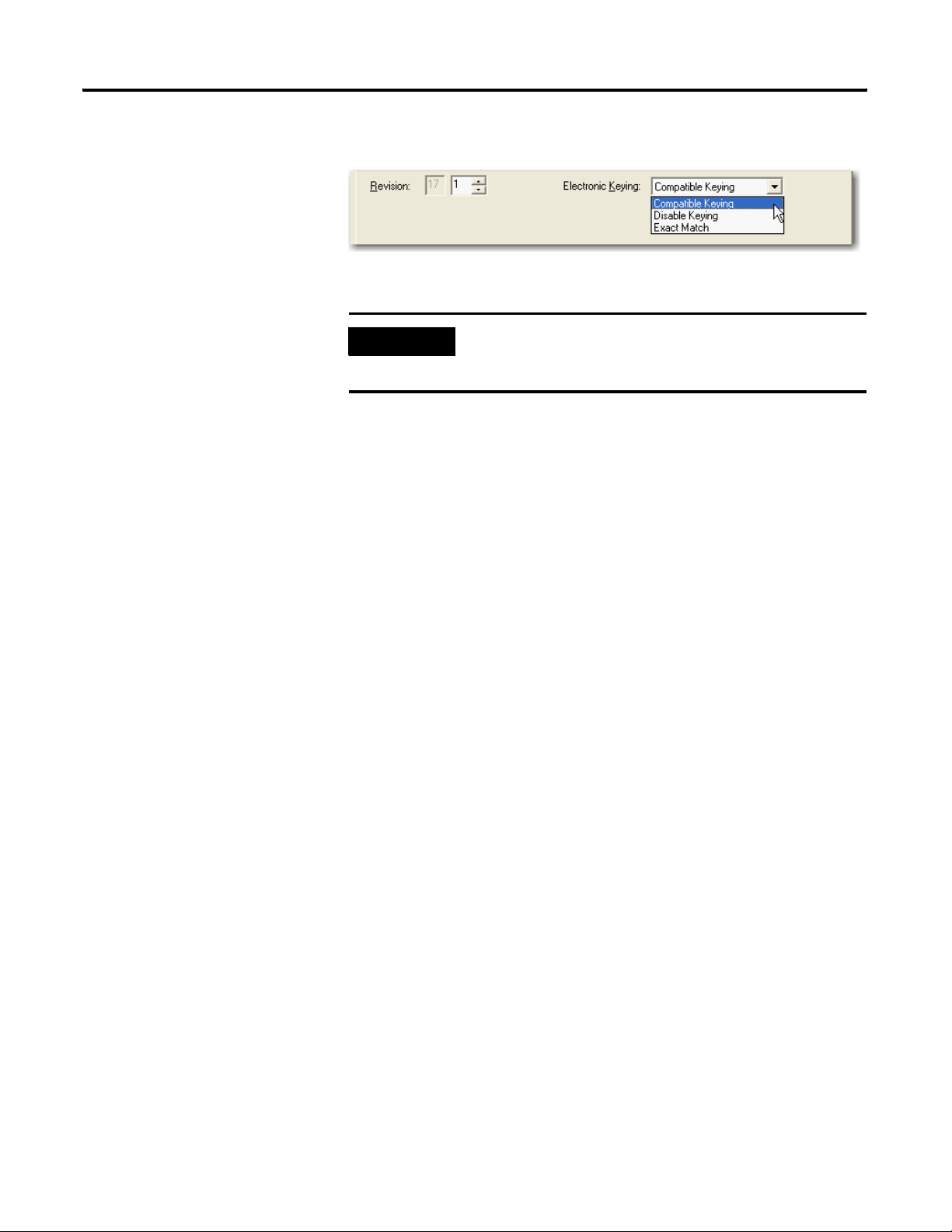
Electronic Keying
The electronic keying feature automatically compares the expected module, as
shown in the RSLogix 5000 I/O Configuration tree, to the physical module
before I/O communication begins. You can use electronic keying to help
prevent communication to a module that does not match the type and revision
expected.
For each module in the I/O Configuration tree, the user-selected keying
option determines if, and how, an electronic keying check is performed.
Typically, three keying option are available.
You must carefully consider the benefits and implications of each keying
option when selecting between them. For some specific module types, fewer
options are available.
•Exact Match
• Compatible Keying
• Disable Keying
Electronic keying is based on a set of attributes unique to each product
revision. When a Logix5000 controller begins communicating with a module,
this set of keying attributes is considered.
Keying Attributes
Attribute Description
Vendor The manufacturer of the module, for example, Rockwell
Automation/Allen-Bradley.
Product Type The general type of the module, for example, communication
adapter, AC drive, or digital I/O.
Product Code The specific type of module, generally represented by its catalog
number, for example, 1756-IB16I.
Major Revision A number that represents the functional capabilities and data
exchange formats of the module. Typically, although not always, a
later, that is higher, Major Revision supports at least all of the data
formats supported by an earlier, that is lower, Major Revision of the
same catalog number and, possibly, additional ones.
Minor Revision A number that indicates the module’s specific firmware revision.
Minor Revisions typically do not impact data compatibility but may
indicate performance or behavior improvement.
You can find revision information on the General tab of a module’s Properties
dialog box.
44 Publication 1756-UM525A-EN-P - June 2003
Page 45
General Tab
Using the 1756-HYD02 Module Features Chapter 4
IMPORTANT
Changing electronic keying selections online may cause the I/O
communication connection to the module to be disrupted and may
result in a loss of data.
Exact Match
Exact Match keying requires all keying attributes, that is, Vendor, Product
Type, Product Code (catalog number), Major Revision, and Minor Revision, of
the physical module and the module created in the software to match precisely
in order to establish communication. If any attribute does not match precisely,
I/O communication is not permitted with the module or with modules
connected through it, as in the case of a communication module.
Use Exact Match keying when you need the system to verify that the module
revisions in use are exactly as specified in the project, such as for use in
highly-regulated industries. Exact Match keying is also necessary to enable
Publication 1756-UM525A-EN-P - June 2003 45
Page 46

Chapter 4 Using the 1756-HYD02 Module Features
Automatic Firmware Update for the module via the Firmware Supervisor
feature from a Logix5000 controller.
EXAMPLE
In the following scenario, Exact Match keying prevents I/O
communication:
• The module configuration is for a 1756-IB16D module with module
revision 3.1. The physical module is a 1756-IB16D module with
module revision 3.2. In this case, communication is prevented
because the Minor Revision of the module does not match
precisely.
Module Configuration
Vendor = Allen-Bradley
Product Type = Digital Input
Module
Catalog Number = 1756-IB16D
Major Revision = 3
Minor Revision = 1
Communication is prevented
Physical Module
Vendor = Allen-Bradley
Product Type = Digital Input
Module
Catalog Number = 1756-IB16D
Major Revision = 3
Minor Revision = 2
IMPORTANT
Changing electronic keying selections online may cause the I/O
Communication connection to the module to be disrupted and may
result in a loss of data.
46 Publication 1756-UM525A-EN-P - June 2003
Page 47

Using the 1756-HYD02 Module Features Chapter 4
Compatible Keying
Compatible Keying indicates that the module determines whether to accept or
reject communication. Different module families, communication adapters,
and module types implement the compatibility check differently based on the
family capabilities and on prior knowledge of compatible products.
Compatible Keying is the default setting. Compatible Keying allows the
physical module to accept the key of the module configured in the software,
provided that the configured module is one the physical module is capable of
emulating. The exact level of emulation required is product and revision
specific.
With Compatible Keying, you can replace a module of a certain Major
Revision with one of the same catalog number and the same or later, that is
higher, Major Revision. In some cases, the selection makes it possible to use a
replacement that is a different catalog number than the original. For example,
you can replace a 1756-CNBR module with a 1756-CN2R module.
Release notes for individual modules indicate the specific compatibility details.
When a module is created, the module developers consider the module’s
development history to implement capabilities that emulate those of the
previous module. However, the developers cannot know future developments.
Because of this, when a system is configured, we recommend that you
configure your module using the earliest, that is, lowest, revision of the
physical module that you believe will be used in the system. By doing this, you
Publication 1756-UM525A-EN-P - June 2003 47
Page 48
Chapter 4 Using the 1756-HYD02 Module Features
can avoid the case of a physical module rejecting the keying request because it
is an earlier revision than the one configured in the software.
EXAMPLE
In the following scenario, Compatible Keying prevents I/O
communication:
• The module configuration is for a 1756-IB16D module with module
revision 3.3. The physical module is a 1756-IB16D module with
module revision 3.2. In this case, communication is prevented
because the minor revision of the module is lower than expected
and may not be compatible with 3.3.
Module Configuration
Vendor = Allen-Bradley
Product Type = Digital Input
Module
Catalog Number = 1756-IB16D
Major Revision = 3
Minor Revision = 3
Communication is prevented
Physical Module
Vendor = Allen-Bradley
Product Type = Digital Input
Module
Catalog Number = 1756-IB16D
Major Revision = 3
Minor Revision = 2
48 Publication 1756-UM525A-EN-P - June 2003
Page 49

Using the 1756-HYD02 Module Features Chapter 4
EXAMPLE
In the following scenario, Compatible Keying allows I/O
communication:
• The module configuration is for a 1756-IB16D module with module
revision 2.1. The physical module is a 1756-IB16D module with
module revision 3.2. In this case, communication is allowed
because the major revision of the physical module is higher than
expected and the module determines that it is compatible with the
prior major revision.
Module Configuration
Vendor = Allen-Bradley
Product Type = Digital Input
Module
Catalog Number = 1756-IB16D
Major Revision = 2
Minor Revision = 1
Communication is allowed
Physical Module
Vendor = Allen-Bradley
Product Type = Digital Input
Module
Catalog Number = 1756-IB16D
Major Revision = 3
Minor Revision = 2
IMPORTANT
Changing electronic keying selections online may cause the I/O
communication connection to the module to be disrupted and may
result in a loss of data.
Publication 1756-UM525A-EN-P - June 2003 49
Page 50

Chapter 4 Using the 1756-HYD02 Module Features
Disabled Keying
Disabled Keying indicates the keying attributes are not considered when
attempting to communicate with a module. Other attributes, such as data size
and format, are considered and must be acceptable before I/O
communication is established. With Disabled Keying, I/O communication
may occur with a module other than the type specified in the I/O
Configuration tree with unpredictable results. We generally do not recommend
using Disabled Keying.
ATTENTION
Be extremely cautious when using Disabled Keying; if used
incorrectly, this option can lead to personal injury or death, property
damage, or economic loss.
If you use Disabled Keying, you must take full responsibility for understanding
whether the module being used can fulfill the functional requirements of the
application.
EXAMPLE
In the following scenario, Disable Keying prevents I/O
communication:
• The module configuration is for a 1756-IA16 digital input module.
The physical module is a 1756-IF16 analog input module. In this
case, communication is prevented because the analog
module rejects the data formats that the digital module
configuration requests.
Module Configuration
Vendor = Allen-Bradley
Product Type = Digital Input
Module
Catalog Number = 1756-IA16
Major Revision = 3
Minor Revision = 1
Communication is prevented
Physical Module
Vendor = Allen-Bradley
Product Type = Analog Input
Module
Catalog Number = 1756-IF16
Major Revision = 3
Minor Revision = 2
50 Publication 1756-UM525A-EN-P - June 2003
Page 51

Using the 1756-HYD02 Module Features Chapter 4
EXAMPLE
In the following scenario, Disable Keying allows I/O
communication:
• The module configuration is for a 1756-IA16 digital input module.
The physical module is a 1756-IB16 digital input module. In this
case, communication is allowed because the two digital modules
share common data formats.
Module Configuration
Vendor = Allen-Bradley
Product Type = Digital Input
Module
Catalog Number = 1756-IA16
Major Revision = 2
Minor Revision = 1
Communication is allowed
Physical Module
Vendor = Allen-Bradley
Product Type = Digital Input
Module
Catalog Number = 1756-IB16
Major Revision = 3
Minor Revision = 2
IMPORTANT
Changing electronic keying selections online may cause the I/O
communication connection to the module to be disrupted and may
result in a loss of data.
Publication 1756-UM525A-EN-P - June 2003 51
Page 52
Chapter 4 Using the 1756-HYD02 Module Features
Using Axes Features
Associated axes can be connected to channels 0 and 1 on the 1756-HYD02
module during initial configuration or on the Associated Axes tab of the
module’s properties in RSLogix 5000.
IMPORTANT
When configuring Servo Axes features, remember the
following:
• The 1756-HYD02 module only works with AXIS_SERVO data type
tags.
• When a parameter transitions to a read-only state, any pending
changes to parameter values are lost, and the parameter reverts
to the most recently saved parameter value.
• When multiple workstations connect to the same controller using
RSLogix 5000 and invoke the Axis Wizard or Axis Properties
dialog, the firmware allows only the first workstation to make any
changes to axis attributes. The second workstation switches to a
Read Only mode, indicated in the title bar, so that you may view
the changes from that workstation, but not edit them.
After you have created an AXIS_SERVO tag, you must configure the axis
connected to that tag. You configure the axis properties on a series of tabs in
RSLogix 5000. The tabs that are available in the axis properties portion of
RSLogix 5000 are described in the rest of this section.
For more information on how to configure the Axes Servo features, or
anything else on the 1756-HYD02 module, see Chapter 3,
1756-HYD02 Module
or the RSLogix 5000 online help.
Configuring the
General Tab
The table below lists the configurable features available on the General tab.
Feature: Definition:
Axis Configuration Selects and displays the intended use of the axis.
• Feedback Only - If the axis is to be used only to display position information from the feedback
interface. This selection minimizes the display of axis properties tabs and parameters.
• Servo - If the axis is to be used for full closed loop operation. This selection maximizes the display of
axis properties tabs and parameters.
Motion Group Selects and displays the Motion Group to which the axis is associated. An axis assigned to a Motion Group
appears in the Motion Groups branch of the Controller Organizer, under the selected Motion Group
sub-branch.
Selecting <none> terminates the Motion Group association, and moves the axis to the Ungrouped Axes
sub-branch of the Motions Groups branch.
52 Publication 1756-UM525A-EN-P - June 2003
Page 53

Using the 1756-HYD02 Module Features Chapter 4
Feature: Definition:
Ellipsis button (. . .) Opens the Motion Group Properties dialog box for the Assigned Motion Group, where you can edit the
properties of the Assigned Motion Group.
If no Motion Group is assigned to this axis, this button is disabled.
New Group Opens the New Tag dialog box, where you can create a new Motion Group tag. This button is enabled only if
you have not created a Motion Group tag.
Module Selects and displays the name of the motion module to which the axis is associated.
Displays <none> if the axis is not associated with any motion module.
Module Type This read-only field displays the type of motion module, if any, associated with the axis.
Displays <none> if the axis is not associated with any motion module.
Channel Selects and displays the channel–either 0 or 1–to which the axis is assigned.
Disabled when the axis is not associated with any motion module.
Publication 1756-UM525A-EN-P - June 2003 53
Page 54

Chapter 4 Using the 1756-HYD02 Module Features
Motion Planner Tab
The table below lists the configurable features available on the Motion Planner
tab.
Feature: Definition:
Output Cam Execution
Targets
Program Stop Action Select how a specific axis stops when the controller undergoes a mode change, or when a Motion Group
Use this field to set the maximum number of output cams that will be used on the axis. This value allocates
controller memory to allow the motion planner to build CAM association tables.
Stop (MGS) instruction is executed:
• Fast Disable: The axis is decelerated to a stop using the current configured value for maximum
deceleration. Loop closure is maintained until the axis motion has stopped; at that time, the axis is
disabled (i.e., Drive Enable is disabled, and the axis loop is disabled).
• Fast Shutdown: The axis is decelerated to a stop using the current configured value for maximum
deceleration. Once the axis motion is stopped, the axis is placed in the shutdown state (i.e., Drive Enable
is disabled, the loop is disabled, and the OK contact is opened). To recover from this state, a reset
instruction must be executed.
• Fast Stop: The axis is decelerated to a stop using the current configured value for maximum
deceleration. Loop closure is maintained after the axis motion has stopped. This mode is useful for
gravity or loaded systems, where closed loop control is needed at all times.
• Hard Disable: The axis is immediately disabled (i.e. Drive Enable is disabled, the axis loop is disabled,
but the OK contact is left closed). Unless the drive is configured to provide some form of dynamic
breaking, this selection results in the axis coasting to a stop.
• Hard Shutdown: The axis is immediately placed in the shutdown state (i.e. Drive Enable is disabled,
the axis loop is disabled, but the OK contact is left open). Unless the drive is configured to provide some
form of dynamic breaking, this selection results in the axis coasting to a stop. To recover from this state,
a reset instruction must be executed.
54 Publication 1756-UM525A-EN-P - June 2003
Page 55
Feature: Definition:
Master Delay
Compensation
Master Delay Compensation helps a slave approach zero tracking error when gearing or camming to the
actual position of a master axis. When camming or gearing off of actual feedback, some delay exists
between when the master position data is generated and when the controller acts on that data for a slave.
This delay causes a slave response to lag behind a master. You can compensate for this delay with the
Master Delay Compensation.
The Position Camming and Gearing functions, when applied to a slave axis, perform Master Delay
Compensation to compensate for the delay time between reading the master axis command position and
applying the associated slave command position to the output of the slave’s axis loop. When the master axis
is running at a fixed speed, this compensation makes sure that the slave axis command position accurately
tracks the actual position of the master axis.
The Master Delay Compensation algorithm extrapolates the position of the master axis at the predicted
time when the command position will be applied to the slave’s axis loop. The total position update delay
created by the Coarse Update Period of the motion group, and, if the master or the slave involves an
AXIS_SERVO_DRIVE data type, it also includes the delay term that is proportional to the SERCOS Update
Period.
The motion planner implements a 1st order extrapolation algorithm that results in zero tracking error while
the master axis is moving at constant velocity. If the master axis accelerates or decelerates the tracking
error is non-zero and proportional to the acceleration or deceleration rate and also proportional to the
square of the total position update delay time.
Using the 1756-HYD02 Module Features Chapter 4
Enable Master Position
Filter
Master Position Filter
Bandwidth
If your application does not require zero tracking error between the master and the slave axis, disable the
Master Delay Compensation feature to eliminate the disturbances the extrapolation algorithm introduces to
the slave axis. When the Master Delay Compensation feature is disabled (bit cleared), the slave axis
appears to be more responsive to the master’s movements, and runs generally smoother than when Master
Delay Compensation feature is enabled (bit set). However, when the master axis is running at a constant
velocity, the slave lags the master by a tracking error that is proportional to the speed of the master.
Since the master axis position is measured in discrete feedback counts and is inherently noisy, the
extrapolation process amplifies that noise according to the total position update delay. The greater the
delay, the greater the noise introduced by the extrapolator.
This feature also includes an extrapolation filter to filter the noise introduced by the extrapolation process.
The time constant of the filter is fixed at 4x the total position update delay (independent of the Master
Position Filter Bandwidth), which again is a function of the Coarse Update Period and the SERCOS Update
Period, if a AXIS_SERVO_DRIVE data type.
Note that Master Delay Compensation, even if explicitly enabled, is not applied in cases where a slave axis
is gearing or camming to the master axis’ command position. Since the ControlLogix controller generates
the command position directly, there is no intrinsic master position delay to compensate for.
When checked, this field enables the Master Position filter to eliminate high frequency oscillations or spikes
from the master position signal being sent to the 1756-HYD02 module. High speed axis oscillation typically
causes the oscillations and spikes in the signal. By removing the high frequency noise, the application may
be able to accurately operate on true variation of the master position signal.
Caution should be used when applying filtering since, by definition, it makes the system less responsive.
Bandwidth used on the Master Position filter. The servo position loop is also a filter. To be effective, the
master position filter bandwidth should be less than or equal to position loop bandwidth. However,
remember that this filter adds propagation delay.
Publication 1756-UM525A-EN-P - June 2003 55
Page 56

Chapter 4 Using the 1756-HYD02 Module Features
Units Tab
Use the Units tab to determine the programming and configuration units used
to define your motion axis. When RSLogix 5000 software is online and the
controller transitions to hard run, or the axis loop is on (i.e., active), then all
the attributes on this tab transition to a read only state. When any attribute
transitions to a read only state, then any pending attribute changes are
reverted.
The table below lists the configurable features available on the Units tab.
Feature: Definition:
Position Units User-defined engineering units (rather than feedback counts) used to label all motion-related values (e.g.,
position or velocity) These position units can be different for each axis.
Position Units should be chosen for maximum ease of use in your application. For example, linear axes
might use position units of inches or meters whereas rotary axes might use units of revolutions or degrees.
Average Velocity Timebase Specifies the time (in seconds) to be used to calculate the average velocity of the axis. This value is
computed by taking the total distance the axis travels in the amount of time specified, and dividing this
value by the timebase.
The average velocity timebase value should be large enough to filter out the small changes in velocity that
would result in a "noisy" velocity value, but small enough to track significant changes in axis velocity. A
value of 0.25 to 0.50 seconds should work well for most applications.
56 Publication 1756-UM525A-EN-P - June 2003
Page 57

Using the 1756-HYD02 Module Features Chapter 4
Servo Tab
For an axis of the data type AXIS_SERVO, configured for Servo operation
(i.e. closed loop operation) in the General tab of this dialog box, use the
SERVO tab to:
• configure an external drive.
• configure the drive fault input.
• select up to two axis attributes whose status can be monitored.
The table below lists the configurable features available on the Servo tab.
Feature: Definition:
External Drive
Configuration
Loop Configuration Currently, only Position Servo is available.
Enable Drive Fault Input When selected, this feature enables the drive fault input. When the drive fault is detected, appropriate
Drive Fault Input - Normally
Open or Closed
Enable Direct Drive Ramp
Control
Direct Drive Ramp Rate This attribute specifies the rate at which the analog output changes from the current value to the requested
Real Time Axis Information
- Attribute 1
Select the Hydraulic drive type. This drive type selection enables proportional, integral and differential (PID)
position loop gains with Feed-Forwards and Directional scaling for the axis loop.
The Torque and Velocity options are not valid on the 1756-HYD02 module.
action is taken based on the Drive Fault Action specified in the Fault Actions tab of this dialog box. On
hydraulic systems, you can use this input if the valve or hydraulic power unit has an output indicating a fault
condition.
Specifies the usual state of the drive fault output:
• Normally Open - sources current when a fault is present
• Normally Closed - sources current when a fault is not present
Check this box to enable direct drive ramp rate control.
value when a Motion Direct Drive On (MDO) command is given. The ramp rate is specified in V/s. The value
should be selected to allow the axis to change speed rapidly without causing excessive shock.
The first axis attributes whose status is transmitted – along with the actual position data – to the Logix
processor. Once the attribute is selected, the real time axis information is automatically updated in the axis
tag structure, as long as Auto Tag Update is enabled.
If a GSV is done to one of these loop status attributes without having selected this attribute via the Real
Time Axis Information attribute, the attribute value will be static and will not reflect the true value in the
hydraulic module.
Real Time Axis Information
- Attribute 2
Publication 1756-UM525A-EN-P - June 2003 57
The second axis attributes whose status is transmitted – along with the actual position data – to the Logix
processor. Once the attribute is selected, the real time axis information is automatically updated in the axis
tag structure, as long as Auto Tag Update is enabled.
If a GSV is done to one of these loop status attributes without having selected this attribute via the Real
Time Axis Information attribute, the attribute value will be static and will not reflect the true value in the
hydraulic module.
Page 58

Chapter 4 Using the 1756-HYD02 Module Features
Feedback Tab
Use the Feedback tab to select a feedback type. RSLogix 5000 displays multiple
feedback types for the 1756-HYD02 module. At this release of the
1756-HYD02 module, only the LDT type is available. The table below lists the
configurable features available on the LDT feedback option.
Feature: Definition:
LDT Type Selection determines what type of LDT provides feedback to the 1756-HYD02 module.
• PWM - also called Gated or DPM
• Start/Stop Rising Edge
• Start/Stop Falling Edge
Recirculations Recirculations is the process of acquiring a measurement from an LDT. You can repeat the measurement process
several times for each interrogation. The repetition of the measurement process is done automatically inside LDTs
with PWM type output. When configuring the LDT, you can select the number of times the process is repeated; that
number is used in this field.
Note that this field is enabled only if you have chosen PWM for LDT Type.
Calibration
Constant
The calibration constant (also called Gradient on some LDTs) is a number that is engraved on each LDT by the
manufacturer. It specifies the characteristics of that individual transducer. Because each transducer has its own
calibration constant, this number is used to calculate the conversion constant for the axis; the conversion constant
changes when an LDT is changed on an axis.
To calculate the Minimum Servo Update Period, use one of the following formulas:
For μs/in: For m/s:
Minimum Servo
Update Period =
[Length (in) X Calibration Constant (μs/in) + Recirculation
delay (approximately 25μs)] X Recirculations
Minimum Servo
Update Period =
[Length (m) X Calibration Constant (m/s) + Recirculation
delay (approximately 0.000025s)] X Recirculations
These formulas do not assume a pre-existing calibration constant or conversion constant. Also, for an LDT with SSI
interface the formulas above apply. However, the specifications for LDTs with SSI interface vary in nature; we
recommend that you apply the manufacturers update period recommendations rather than have RSLogix 5000
compute a minimum servo update period. If it is a rotary (non-LDT) transducer with SSI interface then the Servo
Update Period can be simply defaulted to 250 μs.
Since both axes of the module must be updated at the module's configured servo update rate, make sure the
selected Servo Update Period on the Associated Axes tab is greater than the largest computed limit value above for
the two axes associated with the module.
To calculate the new conversion constant when an LDT is changed, use one of the following formulas:
If the calibration constant is in μs/in: If the calibration constant is in m/s:
New conversion constant =
Old conversion constant X New calibration constant
Old calibration constant
New conversion constant =
Old conversion constant X Old calibration constant
New calibration constant
You must type the new conversion constant in the Conversion Constant field on the Conversion tab. RSLogix 5000
does not automatically update the field after you use the Calculate button on this tab.
Length LDT length defines the stroke of travel of the hydraulic cylinder. LDT length is used with the number of recirculations
to calculate the minimum servo update period.
Scaling Scaling defines the relationship between the transducer unit of measure, as defined in the transducer length field,
and the user’s unit of measure (e.g. 39.37 inches/meter) defined on the Units tab.
Enable Absolute
Absolute Feedback is always enabled for LDT.
Feedback
58 Publication 1756-UM525A-EN-P - June 2003
Page 59

Feature: Definition:
Absolute Feedback
Offset
Calculated
Values:Conversion
Constant
The absolute offset is used to place the machine zero point at the desired location relative to the zero point of the
LDT. The LDT zero point is inside the transducer head and physically unattainable.
Calculation derived from values based on the configuration values entered for the LDT.
The calculated conversion "K" constant is derived based on the LDT configuration values entered on the Feedback
tab. After proper LDT values are entered and the Calculate button is selected, the resultant "K" value is calculated.
This "K" value must be taken from this tab and entered in as the Conversion constant on the Conversion tab.
You must type the new conversion constant in the Conversion Constant field on the Conversion tab. RSLogix 5000
does not automatically update the field after you use the Calculate button on this tab.
Using the 1756-HYD02 Module Features Chapter 4
Calculated
Values:Minimum
Servo Update Period
Calculation derived from values based on the configuration values entered for the LDT.
You can use the calculate button located on the Feedback tab to calculate the appropriate K constant value. The
calculated K constant is derived based on the LDT configuration values entered on the Feedback tab, and must be
taken from that tab and used here.
Conversion Tab
Use this tab to view the Positioning Mode and configure the Feedback
Resolution for an axis. The table below lists the configurable features available
on the Conversion tab.
Feature: Definition:
Positioning Mode The Linear positioning mode is the only positioning mode available on the 1756-HYD02 module. This mode
provides a maximum total linear travel of 230,000 feedback counts. With this mode, the unwind feature is
disabled and you can specify the positive and negative travel limits for the axis to limit the linear travel
distance traveled by the axis.
Conversion Constant Type the number of feedback counts per position unit. This conversion – or “K” – constant allows axis
position to be displayed, and motion to be programmed, in the position units set in the Units tab. The
conversion constant is used to convert axis position units into feedback counts and vice versa. You can
calculate this value on the Feedback tab.
Publication 1756-UM525A-EN-P - June 2003 59
Page 60
Chapter 4 Using the 1756-HYD02 Module Features
Homing Tab
The table below lists the configurable features available on the Homing tab.
Feature: Definition:
Mode Select one of the following homing modes:
• Active: The homing sequence automatically moves the axis to find the home switch. Active homing
sequences use the trapezoidal velocity profile.
• Passive: Homing redefines the absolute position of the axis on the occurrence of a home switch. Passive
homing is most commonly used to calibrate uncontrolled axes, although it can also be used with controlled
axes to create a custom homing sequence. Passive homing, for a given home sequence, works similar to the
corresponding active homing sequence, except that no motion is commanded; the controller just waits for the
switch events to occur.
• Absolute: The absolute homing process applies the configured Home Position to the reported position of the
absolute feedback device to establish the true absolute position of the axis. The only valid Home Sequence
for an absolute Homing Mode is immediate.
The following examples assume that an initial motion is in a positive axial direction.
• Active Homing Configurations
• Active Immediate Home
• Active Bi-directional Home with Switch
• Active Uni-directional Home with Switch
• Passive Homing Configurations
• Passive Immediate Home
• Passive Home with Switch
Position This value, listed in position units, specifies the axis’ absolute position after the specified homing sequence has
been completed. In most cases, this position will be set to zero, although any value within the software travel
limits can be used. After the homing sequence is complete, the axis is left in this position.
Offset Type the desired offset (if any) in position units the axis is to move, upon completion of the homing sequence, to
reach the home position. In most cases, this value will be zero.
Sequence Select which event sets the Home Position:
• Immediate: Sets the Home Position to the present actual position, without motion.
• Switch: Sets the Home Position when axis motion encounters a home limit switch.
Limit Switch Specifies the usual state of the home limit switch:
• Normally Open
• Normally Closed
60 Publication 1756-UM525A-EN-P - June 2003
Page 61

Feature: Definition:
Active Home
For active homing sequences, except for the Immediate Sequence type, select the desired homing direction:
Sequence Group:
Direction
• Forward Bi-directional - The following events occur:
a. The axis moves forward at the rate specified in the Speed field until a homing event occurs (i.e. a switch
turns ON).
b. When the switch turns ON, the axis reverses its direction at the rate specified in the Return Speed field
until the switch turns OFF.
c. If an Offset value is specified, the axis continues in reverse for the corresponding distance.
When the axis stops moving, it is in the Home Position. The graphic below shows this sequence.
Step A – Speed
Step C –
Offset
Using the 1756-HYD02 Module Features Chapter 4
Step B –
Return
Speed
Switch ON
Switch OFF
Home Position
• Forward Uni-directional – The following events occur:
a. The axis moves forward at the rate specified in the Speed field until a homing event occurs (i.e. a switch
turns ON).
b. When the switch turns ON, the axis continues forward at the rate specified in the Return Speed field until
the switch turns OFF.
c. If an Offset value is specified, the axis continues forward the corresponding distance.
When the axis stops moving, it is in the Home Position.
• Reverse Bi-directional – The following events occur:
a. The axis moves in reverse at the rate specified in the Speed field until a homing event occurs (i.e. a switch
turns ON).
b. When the switch turns ON, the axis moves forward at the rate specified in the Return Speed field until the
switch turns OFF.
c. If an Offset value is specified, the axis continues moving forward the corresponding distance.
When the axis stops moving, it is in the Home Position.
• Reverse Uni-directional – The following events occur:
a. The axis moves in reverse at the rate specified in the Speed field until a homing event occurs (i.e. a switch
turns ON).
b. When the switch turns ON, the axis continues in reverse at the rate specified in the Return Speed field until
the switch turns OFF.
c. If an Offset value is specified, the axis continues in reverse the corresponding distance.
When the axis stops moving, it is in the Home Position.
Speed The moving axis’ speed used in the first leg of an active homing sequence. The homing speed specified should be
less than the maximum speed and greater than zero.
Publication 1756-UM525A-EN-P - June 2003 61
Page 62

Chapter 4 Using the 1756-HYD02 Module Features
Feature: Definition:
Return Speed The moving axis’ speed in the return leg(s) of an active homing sequence. The home return speed specified
should be less than the maximum speed and greater than zero.
Hookup Tab
Use this tab to configure and initiate axis hookup test sequences for the axis.
The table below lists the configurable features available on the Hookup tab.
Feature: Definition:
Test Increment Specifies the distance the axis travels when executing the Output & Feedback test.
Feedback Polarity Polarity of the LDT feedback.
• Positive
• Negative
When you execute either the Feedback Test or the Output & Feedback Test, this field is automatically set:
When properly configured, this setting makes sure that axis Actual Position value increases when the axis is
moved in the user defined positive direction. This feature makes sure that programmatic requests to move in
a positive direction result in positive motion on the axis.
Output Polarity Polarity of the analog output to the drive.
• Positive
• Negative
When you execute the Output & Feedback Test, this field is automatically set:
When properly configured, this setting and the Feedback Polarity setting ensure that, when the axis loop is
closed, it is closed as a negative feedback system and not an unstable positive feedback system. This
feature makes sure that programmatic requests to move in a positive direction result in positive motion on
the axis.
Test Feedback Runs the Feedback Test, which checks and, if necessary, reconfigures the Feedback Polarity setting. When
the test is initiated, you must manually move the axis. If physically moving the axis is too difficult, we
recommend that you combine Test Feedback and Test Output & Feedback features to cause the movement.
Test Output & Feedback Runs the Output & Feedback Test, which checks and, if necessary, reconfigures both the polarity of feedback
(the Feedback Polarity setting) and the polarity of the output to the valve (the Output Polarity setting), for an
axis configured for Servo operation in the General tab of this dialog box.
Executing any test operation automatically saves all changes to axis properties.
62 Publication 1756-UM525A-EN-P - June 2003
Page 63

Using the 1756-HYD02 Module Features Chapter 4
Tune Tab
The table below lists the configurable features available on the Tune tab.
Feature: Definition:
Travel Limit Sets the axis’ travel limit during the tune test. If the hydraulic module determines that the axis will not be
able to complete the tuning process before exceeding the tuning travel limit, it will terminate the tuning
profile and report that this limit was exceeded.
Speed Sets the maximum speed for the tune process. This value should be set to the desired maximum operating
speed of the axis (in engineering units) prior to running the tune test.
Direction Sets the direction of the tuning motion profile. Negative indicates reverse direction; positive indicates
forward direction.
Tune Selects the gains to be determined by the tuning test:
• Position Error Integrator
• Velocity Feedforward
• Output Filter
• Velocity Error Integrator
Start Tuning Begins the tuning test. If the tuning process completes successfully, the following attributes are set:
• Gains tab - Set the following attributes here:
• Velocity Feedforward Gain (if checked under Tune, above)
• Position Proportional Gain and Position Integral Gain (if checked under Tune, above)
• Dynamics tab - Set the following attributes here:
• Maximum Velocity
• Maximum Acceleration
• Maximum Deceleration
• Output tab - Set the following attributes here:
• Velocity Scaling
• Low Pass Output Filter (see Note, below)
• Limits - The Position Error Tolerance attribute is set on this tab.
You can use this selection to adjust bandwidth values as needed. During tuning, if the controller detects a
high degree of tuning inertia, it enables the Low Pass Output Filter and calculates and sets a value for Low
Pass Output Filter Bandwidth. Executing a Tune operation automatically saves all changes to axis properties.
ATTENTION: This tuning procedure may cause axis motion with the controller in program mode.
Publication 1756-UM525A-EN-P - June 2003 63
Page 64

Chapter 4 Using the 1756-HYD02 Module Features
Dynamics Tab
The parameters on this tab can be edited in two ways:
The parameters on this tab become read-only when the controller is online if
the controller is set to Hard Run mode, or if a Feedback On condition exists.
When RSLogix 5000 is offline, the parameters described in Table can be
edited and the program saved to disk using either the Save command or by
clicking on the Apply button. You must re-download the edited program to
the controller before it can be run.
• Type parameter changes in the fields available on this tab and use the
OK or Apply buttons to save your edits.
• Edit in the Manual Adjust dialog. To do so:
a. Click on the Manual Tune button.
b. Use the spin controls to edit parameter settings.
Your changes are saved the moment a spin control changes any
parameter value.
The table below lists the configurable features on the Dynamics tab.
Feature: Definition:
Maximum Velocity The steady-state speed of the axis, it is initially set to Tuning Speed by the tuning process. This value is
typically set to about 90% of the maximum speed rating of the motor. We recommend this value be set to
70% of the maximum speed where the maximum pressure is twice the valve-rated pressure and 57% of the
maximum speed where the maximum pressure is three times the valve-rated pressure. This provides
sufficient “head-room” for the axis to operate at all times within the speed limitations of the motor. Any
change in value, caused by manually changing the spin control, is instantly sent to the controller.
Maximum Acceleration The maximum acceleration rate of the axis, in Position Units/second, it is initially set to approximately 85%
of the measured tuning acceleration rate by the tuning process. This provides sufficient “head-room” for the
axis to operate at all times within the acceleration limits of the cylinder (or axis). Any change in value,
caused by manually changing the spin control, is instantly sent to the controller.
Maximum Deceleration The maximum deceleration rate of the axis, in Position Units/second, it is initially set to approximately 85%
of the measured tuning deceleration rate by the tuning process. This provides sufficient “head-room” for the
axis to operate at all times within the deceleration limits of the cylinder (or axis). Any change in value,
caused by manually changing the spin control, is instantly sent to the controller.
64 Publication 1756-UM525A-EN-P - June 2003
Page 65

Using the 1756-HYD02 Module Features Chapter 4
Gains Tab
Use this tab to perform the following offline functions:
• Adjust gain values that have been automatically set by the tuning
process, that is, in the Tune tab.
• Manually configure gains for the position loop.
The 1756-HYD02 module uses a single digital control loop with proportional,
integral, differential and feed-forward gains. The parameters on this tab can be
edited in two ways:
• Type parameter changes in the fields available on this tab and use the
OK or Apply buttons to save your edits.
• Edit in the Manual Adjust dialog. To do so:
a. Click on the Manual Tune button.
b. Use the spin controls to edit parameter settings.
Your changes are saved the moment a spin control changes any
parameter value.
The parameters on this tab become read-only when the controller is online if
the controller is set to Hard Run mode, or if a Feedback On condition exists.
When RSLogix 5000 is offline, the parameters described in Table can be
edited and the program saved to disk using either the Save command or by
clicking on the Apply button. You must download the edited program to the
controller before it can be run.
Publication 1756-UM525A-EN-P - June 2003 65
Page 66
Chapter 4 Using the 1756-HYD02 Module Features
The table below lists the configurable features available on the Gains tab.
Feature: Definition:
Position Gains: Proportional Position gain is used with position error to correct an axis’ position. The proportional gain specifies the
amount of correction (velocity command) that the controller applies for each unit of position error. You must
determine how much position error is expected while an axis runs at a specific speed.
To produce a component of the Velocity Command that ultimately attempts to correct for the position error,
multiply the Position Gains:Proportional by the Position Error.
• Too little Position Gains:Proportional results in excessively compliant, or mushy, axis behavior.
• Too large a Position Gains:Proportional, on the other hand, can result in axis oscillation due to loop
instability.
To set the gain manually, you must first set the velocity output scaling factor in the Output tab of this dialog.
If you know the desired position loop gain in inches per minute per mil or millimeters per minute per mil, use
the following formula to calculate the corresponding P gain:
Position Gains:Proportional = 16.667 * Desired Loop Gain (IPM/mil)
If you know the desired gain bandwidth of the position loop in Hertz, use the following formula to calculate
the corresponding P gain:
Position Gains:Proportional = Bandwidth (Hertz) x 6.28
The typical value for the Position Gains:Proportional is ~100 Sec-
1
.
Position Gains: Integral The Integral (i.e., summation) of Position Error is multiplied by the Position Gains: Integral, or Pos I Gain, to
produce a component to the Velocity Command that ultimately attempts to correct for the position error.
Position Gains: Integral improves the steady-state positioning performance of the system. Increasing the
integral gain generally increases the ultimate positioning accuracy of the system. Excessive integral gain,
however, results in system instability.
In certain cases, Position Gains: Integral control is disabled. One such case is when the analog output to the
axis’ drive is saturated. Continuing integral control behavior in this case would only exacerbate the
situation. When the Integrator Hold parameter is set to Enabled, the axis loop automatically disables the
integrator during commanded motion.
The Position Gains: Integral is also disabled when the axis’ actual position is within the deadband
compensation window of the target position. This keeps the axis from hunting when valves with overlapped
spools are used.
While the Position Gains: Integral is typically established by the automatic axis loop tuning procedure (in the
Tuning tab of this dialog), its value may also be set manually. Before doing this, the Velocity Scaling factor
for the axis must be established for the drive system. Once this is done, the Position Gains: Integral can be
computed based on the current or computed value for the Position Gains:Proportional using the
following formula:
Position Gains: Integral =.025 X 0.001 s/ms X (Position Gains:Proportional)
2
Assuming a Position Gains:Proportional value of 100 Sec-1 this results in a Position Gains: Integral value of
0.25 1/ms-s
66 Publication 1756-UM525A-EN-P - June 2003
Page 67

Using the 1756-HYD02 Module Features Chapter 4
Feature: Definition:
Position Gains: Differential Velocity Error is multiplied by the Position Gains: Differential to produce a component to the analog output
or Velocity Command that ultimately attempts to correct for the velocity error, creating a damping effect.
Thus, increasing the Position Gains: Differential results in smoother motion, enhanced acceleration, reduced
overshoot, and greater system stability. However, too much Position Gains: Differential leads to high
frequency instability and resonance effects.
Feedforward Gains:
Velocity
Feedforward Gains: Velocity scales the current Command Velocity by the Feedforward Gains: Velocity and
adds it as an offset. Hence, the Feedforward Gains: Velocity allows the following error of the hydraulic
closed loop system to be reduced to nearly zero when running at a constant speed. This is important in
applications such as electronic gearing, position camming, and synchronization applications, where it is
necessary that the actual axis position not significantly lag behind the commanded position at any time.
The optimal value for Feedforward Gains: Velocity is 100%. However, you may need to adjust the value to
accommodate axes with non-linear characteristics and other application considerations.
Feedforward Gains:
Acceleration
Feedforward Gains: Acceleration scales the current Command Acceleration by the Feedforward Gains:
Acceleration and adds it as an offset to the analog output generated by the position loop. With this done,
the position loops do not need to generate much of a contribution to the analog output, hence the Position
and/or Velocity Error values are significantly reduced.
When used in conjunction with the Feedforward Gains: Velocity, the Feedforward Gains: Acceleration
allows the following error of the hydraulic closed loop system during the acceleration and deceleration
phases of motion to be reduced to nearly zero. This is important in applications such as electronic gearing,
position camming, and synchronization applications, where it is necessary that the actual axis position not
significantly lag behind the commanded position at any time.
Remember, however, because the output is scaled in velocity, the Feedforward Gains:Acceleration
calibration is application-dependent.
Integrator Hold The integrator is always enabled. With this setting, the position loop temporarily disables the integrators
while the command position is changing. Point-to-point moves use this feature to minimize the integrator
wind-up during motion.
Manual Tune This button accesses the Gains tab of the Manual Tune dialog for online editing.
The Manual Tune button is disabled when RSLogix 5000 is in Wizard mode, and when you have not yet
saved or applied your offline edits to the other parameters in this table.
Publication 1756-UM525A-EN-P - June 2003 67
Page 68

Chapter 4 Using the 1756-HYD02 Module Features
Output Tab
Use the Output tab for offline configuration of the following:
The parameters on this tab can be edited in two ways:
• Scaling values that are used to generate gains.
• The analog loop’s low-pass digital output filter.
• Type parameter changes in the fields available on this tab and use the
OK or Apply buttons to save your edits.
• Edit in the Manual Adjust dialog. To do so:
a. Click on the Manual Tune button.
b. Use the spin controls to edit parameter settings.
Your changes are saved the moment a spin control changes any
parameter value.
The parameters on this tab become read-only when the controller is online if
the controller is set to Hard Run mode, or if a Feedback On condition exists.
When RSLogix 5000 is offline, the following parameters can be edited and the
program saved to disk using either the Save command or by clicking on the
Apply button. You must download the edited program to the controller before
it can be run.
The table below lists the configurable features available on the Output tab.
Feature: Definition:
Velocity Scaling Converts the output of the position loop into equivalent voltage to an external hydraulic axis. This
conversion “normalizes” the units of the position loop gain parameters so that variations in feedback
resolution, drive scaling, or mechanical gear ratios do not affect their values. The automatic loop tuning
procedures typically establish the Velocity Scaling value, but these values can be calculated, if necessary,
using the following guidelines.
Velocity Scaling = 100% / (Speed @ 100%)
For example, if this axis is using position units of inches, and the hydraulic system is designed such that
with an input of 100% (e.g. 10 Volts) the axis goes 55.6 inches per second, the Velocity Scaling attribute
value would be calculated as:
Velocity Scaling = 100% / (55.6) = 1.8% / Inches Per Second
68 Publication 1756-UM525A-EN-P - June 2003
Page 69

Using the 1756-HYD02 Module Features Chapter 4
Feature: Definition:
Direction Scaling Ratio The directional scaling ratio compensates for the difference in the maximum speed in the extend vs. retract
direction on single-ended hydraulic cylinders. Different piston areas on the cap (blind) end compared to the
rod end of the cylinder cause the speed difference.
Hydraulic Cylinder
Cap End
Piston
Rod End
Rod
Enable Low-pass Output
Filter
Low-pass Output Filter
Bandwidth
Cap End Area =
Rod End Area =
Depending on your Feedback Polarity Setting
Directional Scaling Ratio =
Directional Scaling Ratio =
[(Cylinder Radius)
[(Cylinder Radius)
or
2
x (pi)]
2
–
x (pi)]
Cap End Area
Rod End Area
Rod End Area
Cap End Area
[(Rod Radius)
2
x (pi)]
To find this value, you can run the auto-tune routine in both directions and find the ratio of the velocity
scaling in the two directions.
Enables the axis loop’s low-pass digital output filter.
During tuning, if the controller detects a high degree of tuning inertia, it enables the Low Pass Output Filter
and calculates and sets a value for Low Pass Output Filter Bandwidth.
This Hertz bandwidth value filters out high frequency variation of the hydraulic module output to the drive.
All output from the hydraulic module greater than the Filter Bandwidth setting will be filtered-out, and not
sent to the drive.
If the Low-pass Output Filter Bandwidth value is set to zero, the low-pass output filter is disabled. The lower
the Filter Bandwidth value, the greater the attenuation of these high frequency components of the output
signal. Because the low-pass filter adds lag to the position loop, which pushes the system towards
instability, decreasing the Filter Bandwidth value usually requires lowering the Position or Velocity
Proportional Gain settings to maintain stability. The output filter is particularly useful in high inertia
applications where resonance behavior can severely restrict the maximum bandwidth capability of the
position loop.
Manual Adjust Click on this button to access the Output tab of the Manual Tune dialog for online editing.
The Manual Tune button is disabled when RSLogix 5000 is in Wizard mode, and when you have not yet
saved or applied your offline edits to the above parameters.
Publication 1756-UM525A-EN-P - June 2003 69
Page 70

Chapter 4 Using the 1756-HYD02 Module Features
Limits Tab
Use the Limits tab to set the following parameters offline:
The parameters on this tab can be edited in two ways:
• Enable positive and negative software travel limits
• Set maximum positive and negative software travel limits
• Configure Position Error Tolerance
• Configure Position Lock Tolerance
• Set the module’s Output Limit
• Type parameter changes in the fields available on this tab and use the
OK or Apply buttons to save your edits.
• Edit in the Manual Adjust dialog. To do so:
a. Click on the Manual Tune button.
b. Use the increase/decrease arrows to edit parameter settings.
Your changes are saved the moment increase/decrease arrows change
any parameter value.
The parameters on this tab become read-only when the controller is online if
the controller is set to Hard Run mode, or if a Feedback On condition exists.
When RSLogix 5000 is offline, the following parameters can be edited and the
program saved to disk using either the Save command or by clicking on the
Apply button. You must download the edited program to the controller before
it can be run.
The table below lists the configurable features available on the Limits tab.
Feature: Definition:
Soft Travel Limits Enables software overtravel checking for an axis when Positioning Mode is set to Linear (on the Conversion
tab).
If an axis is configured for software overtravel limits, and if that axis passes beyond these maximum travel
limits (positive or negative), a software overtravel fault is issued. The response to this fault is specified by
the Soft Overtravel setting (on the Fault Actions tab). Software overtravel limits are disabled during the
tuning process.
When Soft Travel Limits are enabled, the travel limits are active even if the axis has not been honed or
before an absolute home position has been established. Under this condition, maximum positive and
maximum negative travel limit positions are not necessarily related to user-defined references.
Soft Travel
Limits:Maximum Positive
Soft Travel
Limits:Maximum Negative
70 Publication 1756-UM525A-EN-P - June 2003
Type the maximum positive position to be used for software overtravel checking, in position units. The
Maximum Positive limit must be greater than the Maximum Negative limit.
Type the maximum negative position to be used for software overtravel checking, in position units. The
Maximum Negative limit must be less than the Maximum Positive limit.
Page 71
Using the 1756-HYD02 Module Features Chapter 4
Feature: Definition:
Position Error Tolerance Specifies how much position error the axis loop tolerates before issuing a position error fault. This value is
interpreted as a +/- quantity.
For example, setting Position Error Tolerance to 0.75 position units means that a position error fault will be
generated whenever the position error of the axis is greater than 0.75 or less than -0.75 position units.
This value is set to twice the following error at maximum speed based on the measured response of the
axis, during the autotuning process. In most applications, this value provides reasonable protection in case
of an axis fault or stall condition without nuisance faults during normal operation. If you need to change the
calculated position error tolerance value, the recommended setting is 120% to 150% of the position error
while the axis is running at its maximum speed.
Position Lock Tolerance Specifies the maximum position error the hydraulic module accepts to indicate the Position Lock status bit is
set. This is useful in determining when the desired end position is reached for position moves. This value is
interpreted as a +/- quantity.
For example, specifying a lock tolerance of 0.01 provides a minimum positioning accuracy of +/- 0.01
position units.
Output Limit Provides a method of limiting the maximum analog output voltage of a physical axis to a specified level. The
analog output for the axis as a function of position loop error, both with and without analog output limiting.
The analog output limit may be used if the valve cannot accept the full +/-10V range of the analog output. In
this case, the analog output limit value effectively limits the maximum command sent to the valve. For
example, if the valve can only accept command signals up to +/-7.5V, set the analog output limit value to
7.5V.
Manual Adjust This button accesses the Limits tab of the Manual Tune dialog for online editing.
The Manual Tune button is disabled when RSLogix 5000 is in Wizard mode, and when you have not yet
saved or applied your offline edits to the above parameters.
Publication 1756-UM525A-EN-P - June 2003 71
Page 72

Chapter 4 Using the 1756-HYD02 Module Features
Offset Tab
Use the Offset tab to make offline adjustments to the following values:
The parameters on this tab can be edited in two ways:
• Deadband Compensation
• Velocity Offset
•Output Offset
• Type parameter changes in the fields available on this tab and use the
OK or Apply buttons to save your edits.
• Edit in the Manual Adjust dialog. To do so:
a. Click on the Manual Tune button.
b. Use the spin controls to edit parameter settings.
Your changes are saved the moment a spin control changes any
parameter value.
Feature: Definition:
Friction/Deadband
Compensation: Friction
Compensation
Friction/Deadband
Compensation: Window
The percentage of output level added to the current positive value, or subtracted from the current negative
value, for the purpose of moving an axis that is stuck in place due to static friction. The default value of this
parameter is 0%.
It is not unusual for an axis to have enough static friction–called "sticktion"–that, even with a significant
position error, the axis refuses to budge. Friction Compensation is used to break "sticktion" in the presence
of a non-zero position error.
The Friction Compensation value should be slightly less than the value that would break the "sticktion". A
larger value will cause the axis to "dither" (i.e. move rapidly back and forth about the commanded position).
This value is not applicable for Ultra3000 drives.
This window is defined as: command position - window attribute to command position + window attribute
While the command velocity is zero and the actual position is within this window, the Friction Compensation
(or Deadband Compensation, for Hydraulics) is applied proportionally to the position error. While the
command velocity is non-zero, the full Friction Compensation is applied.
The parameters on this tab become read-only when the controller is online if
the controller is set to Hard Run mode, or if a Feedback On condition exists.
When RSLogix 5000 is offline, the following parameters can be edited and the
program saved to disk using either the Save command or by clicking on the
Apply button. You must download the edited program to the controller before
it can be run.
Table lists the configurable features available on the Offset tab.
72 Publication 1756-UM525A-EN-P - June 2003
Page 73

Feature: Definition:
Backlash Compensation:
Reversal Offset
Use this feature to compensate for positional inaccuracy introduced by mechanical backlash. For example,
power-train type applications require a high level of accuracy and repeatability during machining operations.
Lost motion is often generated by a number of mechanical components that may introduce inaccuracies and
that are subject to wear over their lifetime. Hence, when an axis is commanded to reverse direction,
mechanical lost motion in the machine may result in a small amount of actuator motion without axis motion.
As a result, the feedback device may indicate movement even though the axis has not physically moved.
The Reversal Offset specifies a directional offset that is added to the motion planner’s command position as
it is applied to the associated axis loop to compensate for mechanical lost motion. When the commanded
velocity changes sign (a reversal), the ControlLogix controller adds, or subtracts, the Reversal Offset value
from the current commanded position; the axis immediately moves the motor to the other side of the lost
motion window and engages the load. The application of this directional offset is completely transparent
and does not affect the value of the Command Position attribute.
If a value of zero is applied to the Reversal Offset, the feature is effectively disabled. Once enabled by a
non-zero value, and the load is engaged by a reversal of the commanded motion, changing the Reversal
Offset can cause the axis to shift as the offset correction is applied to the command position.
Backlash Compensation:
Stabilization Window
Eliminates backlash-induced instability while maintaining full system bandwidth. This algorithm value
should be commensurate with the amount of backlash in the mechanical system.
Using the 1756-HYD02 Module Features Chapter 4
Mechanical backlash is a common problem in applications that use mechanical gearboxes. Until the input
gear is turned to the point where its proximal tooth contacts an adjacent tooth of the output gear, the
reflected inertia of the output is not felt at the actuator (i.e. when the gear teeth are not engaged, the
system inertia is reduced to the motor inertia).
If the axis loop is tuned for peak performance with the load applied, the axis will be at best under-damped
and at worst unstable in the condition where the gear teeth are not engaged. In the worst case scenario, the
motor axis and the input gear oscillates wildly between the limits imposed by the output gear teeth. The net
effect is a loud buzzing sound when the axis is at rest. If this situation persists the gearbox will wear out
prematurely. To prevent this condition, the conventional approach is to de-tune the loop so that the axis is
stable without the gearbox load applied. Unfortunately, system performance suffers.
The key to this algorithm is a tapered Torque Scaling profile, that is a function of the position error of the
axis loop. The reason for the tapered profile, as opposed to a step profile, is that when the position error
exceeds the backlash distance a step profile would create a very large discontinuity in the torque output.
This repulsing torque tends to slam the axis back against the opposite gear tooth and perpetuate the buzzing
effect. The tapered profile is only run when the acceleration command to the axis loop is zero, i.e. when we
are not commanding any acceleration or deceleration that would engage the teeth of the gearbox.
Properly configured with a suitable value for the Backlash Stabilization Window, this algorithm entirely
eliminates the gearbox buzz without sacrificing any axis performance. The Backlash Stabilization parameter
determines the width of the window over which backlash stabilization is applied. In general, this value
should be set to the measured backlash distance. A Backlash Stabilization Window value of zero effectively
disables the feature. (Patent Pending)
Velocity Offset Provides a dynamic velocity correction to the output of the position loop, in position units per second.
Because the position loop output value is updated synchronously every Coarse Update Period, the Velocity
Offset can be tied into custom outer control loop algorithms using Function Block programming. Position
loop is still closed and compensates for velocity offset values by changing position error. Position error
faults are possible.
Publication 1756-UM525A-EN-P - June 2003 73
Page 74

Chapter 4 Using the 1756-HYD02 Module Features
Feature: Definition:
Output Offset Corrects the problem of axis “offset”, by adding a fixed voltage value (not to exceed +/-10V) to the analog
output value. Use a value to achieve near zero axis velocity when the uncompensated analog output value
is zero.
When interfacing to a valve on a hydraulic axis, it is necessary to compensate for the effect of drive offset.
Cumulative offsets of the hydraulic module’s DAC output and the Axis Input result in a situation where a
zero commanded analog output value causes the axis to “drift”. If the drift is excessive, it can play havoc on
the Hookup Diagnostic and Tuning procedures, as well as result in a steady-state non-zero position error
when the axis loop is closed.
Manual Adjust Click on this button to access the Offset tab of the Manual Tune dialog for online editing.
The Manual Tune button is disabled when RSLogix 5000 is in Wizard mode, and when you have not yet
saved or applied your offline edits to the above parameters.
Fault Actions Tab
You must set the action if any of the faults listed in Table occurs. The possible
options are:
•Shutdown
• Disable Drive
• Stop Motion
• Status Only - When this option is chosen for any fault condition, the
fault does not cause the axis to stop its current motion. However, new
motion is prevented from starting.
The table below lists the faults that may occur:
Fault Type: Definition:
Drive Fault Specifies the fault action to be taken when a drive fault condition is detected, for an axis with the Drive
Fault Input enabled (in the Servo tab of this dialog) that is configured as Servo (in the General tab of this
dialog).
Feedback Noise Specifies the fault action to be taken when excessive feedback noise is detected.
Feedback Specifies the fault action to be taken when feedback loss condition is detected.
ATT ENTI ON: If a feedback fault occurs, the 1756-HYD02 module cannot control the axis. We recommend
you use either the shutdown or disable drive option for this setting. If used, the stop motion
and status only options may cause dangerous conditions when a feedback fault occurs.
Position Error Specifies the fault action to be taken when position error exceeds the position tolerance set for the axis, for
an axis configured as Servo (on the General tab).
Soft Overtravel Specifies the fault action to be taken when a software overtravel error occurs, for an axis with Soft Travel
Limits enabled and configured (on the Limits tab) that is configured as Servo (on the General tab).
74 Publication 1756-UM525A-EN-P - June 2003
Page 75

Using the 1756-HYD02 Module Features Chapter 4
Table describes the possible actions if any of the faults listed in Table occurs
Fault: Definition:
Shutdown If a fault action is set to Shutdown, when the associated fault occurs:
• servo action status is immediately disabled,
• the drive output is zeroed,
and
• the appropriate drive enable output is deactivated.
Furthermore, this fault action opens the OK contact associated with the hydraulic module that can be used
to open the E-stop string to the hydraulic power unit.
Shutdown is the most severe action to a fault and it is usually reserved for faults that could endanger the
machine or the operator if power is not removed as quickly and completely as possible.
Disable Drive If a fault action is set to Disable Drive, when the associated fault occurs:
• servo action status is immediately disabled,
• the drive output is zeroed,
and
• the appropriate drive enable output is deactivated.
Stop a Motion If a fault action is set to Stop Motion, when the associated fault occurs, the axis immediately starts
decelerating the axis command position to a stop at the configured Maximum Deceleration Rate without
disabling servo action status or the hydraulic modules Drive Enable output.
This is the gentlest stopping mechanism in response to a fault. It is usually used for less severe faults. After
the stop command fault action has stopped the axis, no further motion can be generated until the fault is
first cleared.
Status Only If a fault action is set to Status Only, when the associated fault occurs, no action is taken. The application
program must handle any motion faults. In general, this setting should only be used in applications where
the standard fault actions are not appropriate.
ATTENTION: Selecting the wrong fault action for your application can cause a dangerous condition. Keep
clear of moving machinery.
Publication 1756-UM525A-EN-P - June 2003 75
Page 76
Chapter 4 Using the 1756-HYD02 Module Features
Tag Tab
Use this tab to change the name and description of the axis. When you are
online, all of the parameters on this tab transition to a read-only state, and
cannot be modified. If you go online before you save your changes, all pending
changes revert to their previously-saved state.
The table below lists the features available on the Tag tab. Some of these
features cannot be changed on this screen however.
Fault Type: Definition:
Name Displays the name of the current tag.
Description Displays the description of the current tag, if any is available.
Tag Type Indicates the current tag type.
• Base
• Alias
• Consumed
Data Type Displays the data type associated with the current tag.
Scope Displays the scope of the current tag. For axis tags, the scope must be controller scope.
Style Displays the default style in which to display the value of the tag. Note that style is only applicable to an
atomic tag; a structure tag does not have a display style.
Chapter Summary and What’s Next
In this chapter, you read about the 1756-HYD02 module’s features.
Chapter 5 describes
Troubleshooting the 1756-HYD02 Module
.
76 Publication 1756-UM525A-EN-P - June 2003
Page 77

Chapter
5
Troubleshooting the 1756-HYD02 Module
What This Chapter Contains
Using the Status Indicators
This chapter describes how to troubleshoot the 1756-HYD02 module.
The ControlLogix Hydraulic Servo module uses a single bi-colored LED to
indicate module OK status and bi-colored LED indicators to show individual
feedback (FDBK) and drive (DRIVE) status for both axes.
During power-up, the module completes an indicator test. The OK indicator
turns red for 1 second and then turns to flashing green if the module passes all
its self tests.
The module’s status indicators are shown below.
For more information about: See page:
Using the Status Indicators 77
Using the OK Indicator 78
Using the FDBK Indicator 79
Using the DRIVE Indicator 80
Using RSLogix 5000 to Troubleshoot the
Module
81
43454
77Publication 1756-UM525A-EN-P - June 2003 77
Page 78

Chapter 5 Troubleshooting the 1756-HYD02 Module
Using the OK Indicator
The module’s OK indicator is shown below.
OK indicator
The table below explains the OK indicator.
OK Indicator Displays
If the OK
indicator
displays:
Off The module is not operating. • Apply chassis power.
Flashing green
light
The module status is: Take this action:
• Verify the module is completely inserted into the
chassis and backplane.
The module has passed internal diagnostics, but it is not
communicating axis data over the backplane.
• Configure the module to begin communications.
• If you have configured the module, check the slot
number in the 1756-HYD02 Properties dialog box.
43454
Steady green
light
Flashing red light One of the following:
Steady red light One of the following:
One of the following:
· Axis data is being exchanged with the module.
· The module is in the normal operating state.
• A major recoverable failure has occurred.
• A communication fault, timer fault, or NVS update is
in progress.
• The OK contact has opened.
• A potential non- recoverable fault has occurred.
• The OK contact has opened.
None
If a Non-Volatile Storage (NVS) update is in progress,
complete the NVS update.
If an NVS update is not in progress, follow these steps:
1. Check the Servo Fault word for the source of the error.
2. Clear the servo fault condition using the Motion Axis
Fault Reset instruction.
3. Resume normal operation.
4. If the flashing persists, reconfigure the module.
Follow these steps:
1. Reboot the module.
2. If the solid red persists, replace the module.
78 Publication 1756-UM525A-EN-P - June 2003
Page 79

Troubleshooting the 1756-HYD02 Module Chapter 5
Using the FDBK Indicator
The module’s FDBK indicators are shown in Figure . Make sure that any
transducer used with the 1756-HYD02 module uses an external interrogation
signal.
Feedback
indicators
43454
The table below explains the FDBK indicators.
FDBK Indicator Displays
If the FDBK
indicator
displays:
Off The axis is not used. If you are using this axis, make sure the module is
The module status is: Take this action:
configured and an axis tag has been associated with the
module.
Flashing green
light
Steady green
light
Flashing red light The axis servo loop error tolerance has been exceeded. Follow these steps:
Steady red light An axis LDT feedback fault has occurred. Follow these steps:
The axis is in the normal servo loop inactive state. None. The servo axis state can be changed by executing
motion instructions.
The axis is in the normal servo loop active state. None. The servo can may be changed by executing motion
instructions.
1. Correct the source of the problem.
2. Clear the servo fault condition using the Motion Axis
Fault Reset instruction.
3. Resume normal operation.
1. Correct the source of the problem by checking the LDT
and power connections.
2. Clear the servo fault condition using the Motion Axis
Fault Reset instruction.
3. Resume normal operation.
Publication 1756-UM525A-EN-P - June 2003 79
Page 80
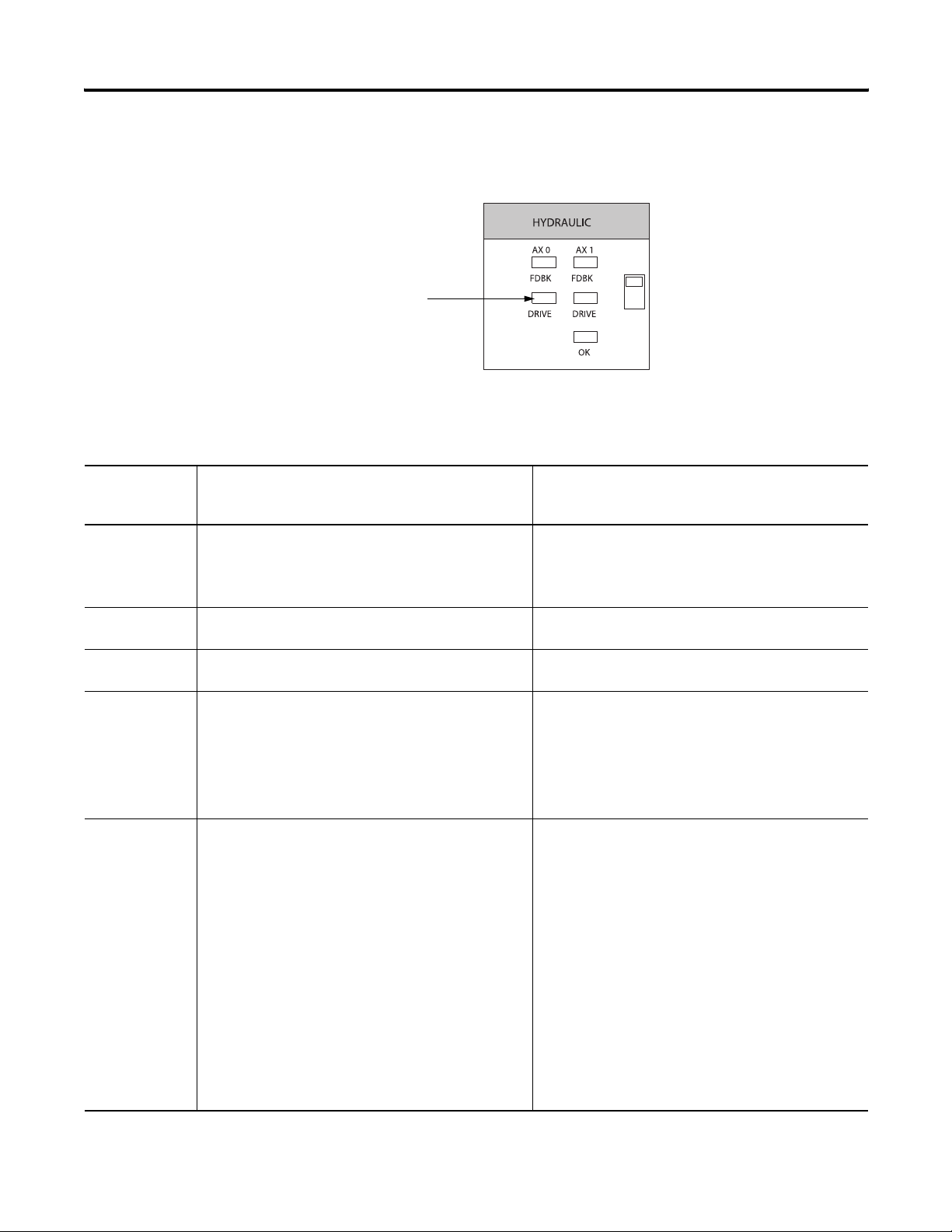
Chapter 5 Troubleshooting the 1756-HYD02 Module
Using the DRIVE Indicator
The module’s DRIVE indicators are shown in Figure .
Drive
indicators
43454
The table below explains the DRIVE indicator.
DRIVE Indicator Displays
If the DRIVE
indicator
displays:
Off One of the following:
Flashing green
light
Steady green light The axis drive is in the normal enabled state. None. The servo axis state can be changed by executing
Flashing red light The axis drive output is in the shutdown state. Follow these steps:
The module status is: Take this action:
If the axis is being used and is not a position-only axis
type, make sure the module is configured, an axis tag has
• The axis is not used.
• The axis is a position-only axis type.
The axis drive is in the normal disabled state. None. The servo axis state can be changed by executing
been associated with the module, and the axis type is
servo.
motion instructions.
motion instructions.
1. Check for faults that may have generated this state.
2. Execute the Shutdown Reset motion instruction.
3. Resume normal operation.
Steady red light The axis drive is faulted. Follow these steps:
1. Check the drive status.
2. Clear the Drive Fault condition at the drive.
3. Clear the servo fault condition using the Motion Axis
Fault Reset instruction.
4. Resume normal operation.
5. Check the configuration for the Drive Fault.
• If configured to be normally open and there is no
voltage, this is the normal condition.
• If configured to be normally closed and 24V is
applied, this is the normal condition.
80 Publication 1756-UM525A-EN-P - June 2003
Page 81

Troubleshooting the 1756-HYD02 Module Chapter 5
Using RSLogix 5000 to Troubleshoot the Module
You can also use the RSLogix 5000 programming software to detect and
diagnose problems with the ControlLogix Hydraulic Servo module. The
software alerts you to fault and other conditions in the following ways:
· Warning Signal in Controller Organizer
· Fault Message in Status Line
· Notification in Axis Structure
Warning Signal in Controller Organizer
The warning signal appears in the module listing as shown below.
Publication 1756-UM525A-EN-P - June 2003 81
Page 82

Chapter 5 Troubleshooting the 1756-HYD02 Module
Fault Message in Status Line
The module status line appears in the lower left corner of each configuration
tab. It provides a brief explanation of the module status and reports Faulted
when a fault has occurred on the module.
Explanation of the
module fault
The number one (1)
indicates a fault
Notification in Axis Structure
Use the Tag Monitor to view controller tags. A fault has occurred for any point
that lists the number one (1) in the Fault line.
Chapter Summary and
In this chapter, you read about Troubleshooting the 1756-HYD02 Module.
Appendix A lists the module
Specifications
.
What’s Next
82 Publication 1756-UM525A-EN-P - June 2003
Page 83

Appendix
Specifications
Number of axes 2 axes maximum
Servo loop
Typ e
Gain resolution
Absolute position range
Rate
Module location 1756 ControlLogix chassis
Module keying Electronic
Power dissipation 5.5W maximum
Thermal dissipation 18.77 BTU/hr.
Backplane current 5.1V dc @ 700mA and 24V dc @ 2.5mA
Proportional, integral and differential (PID) with
Feed-Forwards and Directional scaling
32- bit floating point
230,000 LDT counts
500Hz to 4kHz (Selectable)
A
LDT input
Typ e
Sample rate
Resolution
Electrical interface
Input impedance
Output load
Registration inputs
Typ e
24V dc input voltage
Maximum on
Minimum on
Maximum off
5V dc input voltage
Maximum on
Minimum on
Maximum off
Input impedance
24V dc input
5V dc input
Response time (position latched)
(1)
PWM, Start/Stop rising or falling edge
120MHz (8.33ns)
Less than 0.001 inch with single recirculation
Isolated 5V differential (RS-422 signal)
215 Ohm differential
100 Ohm minimum
Optically isolated, current sinking input
+24V dc nominal
26. 4V dc
18. 5V dc
3.5V dc
+5V dc nominal
5.5V dc
3.7V dc
1.5V dc
1.2 kΩ
9.5 kΩ
1 servo update period - Servo update period is the
period at which the position and/or velocity
feedback is sampled and a new servo loop is
closed to generate a new servo output. The time of
this period is a user-defined setting from 250μs to
2000μs.
All other inputs
Typ e
Input voltage
Maximum on
Minimum on
Maximum off
Input impedance
Publication 1756-UM525A-EN-P - June 2003 83
Optically isolated, current sinking input
+24V dc nominal
26. 4V dc
17. 0V dc
8.5V dc
7.5 kΩ
Page 84

Appendix A Specifications
Servo output
Type
Voltage range
Voltage resolution
Load
Maximum offset
Gain error
Analog voltage
±10V dc
16 bits
5.6 kOhms resistive minimum
25 mV
±4%
All other outputs
Type
Operating voltage
Maximum
Operating current
Solid-state isolated relay contacts
+24V dc nominal
26. 4V dc
75 mA
Isolation Voltage
User to System 30V continuous
RTB keying User-defined
Field wiring arm
36-position RTB (1756-TBCH or -TBS6H)
RTB screw torque (cage clamp)
4.4 inch-pounds (0.4Nm) maximum
(2)
Conductors
Wire size
#22 to #14 AWG (0.324 to 2.08 sq. mm) stranded
3/ 64 inch (1.2 mm) insulation maximum
Category
(3), (4)
2
Screwdriver blade width for RTB 1/8 inch (3.2mm) maximum
Environmental Conditions
Operating Temperature IEC 60068-2-1 (Test Ad, Operating Cold),
IEC 60068-2-2 (Test Bd, Operating Dry Heat),
IEC 60068-2-14 (Test Nb, Operating Thermal
Shock):
0 to 60°C (32 to 140°F)
Storage Temperature IEC 60068-2-1 (Test Ab, Un-packaged
Non-operating Cold),
IEC 60068-2-2 (Test Bb, Un-packaged
Non-operating Dry Heat),
IEC 60068-2-14 (Test Na, Un-packaged
Non-operating Thermal Shock):
–40 to 85°C (–40 to 185°F)
Relative Humidity IEC 60068-2-30 (Test Db, Un-packaged
Non-operating Damp Heat):
5 to 95% non-condensing
Vibration IEC60068-2-6 (Test Fc, Operating):
2g @ 10-500Hz
(1)
Shock IEC60068-2-27 (Test Ea, Unpackaged shock):
Operating 30g
Non-operating 50g
Emissions CISPR 11:
Group 1, Class A
ESD Immunity IEC 61000-4-2:
6kV contact discharges
8kV air discharges
84 Publication 1756-UM525A-EN-P - June 2003
Page 85

Radiated RF Immunity IEC 61000-4-3:
10V/m with 1kHz sine-wave 80%AM from 80MHz
to 2000MHz
10V/m with 200Hz 50% Pulse 100%AM at
900Mhz
EFT/B Immunity IEC 61000-4-4:
±2kV at 5kHz on signal ports
Surge Transient Immunity IEC 61000-4-5:
+
2kV line-earth (CM) on shielded ports
Conducted RF Immunity IEC 61000-4-6:
10Vrms with 1kHz sine-wave 80%AM from 150kHz
to 80MHz
Enclosure Type Rating None (open-style)
Specifications Appendix A
Certifications
(when product is marked)
UL UL Listed Industrial Control Equipment
CSA CSA Certified Process Control Equipment
CSA CSA Certified Process Control Equipment
for Class I, Division 2 Group A,B,C,D
Hazardous Locations
(5)
CE
European Union 89/336/EEC EMC
Directive, compliant with:
EN 50082-2; Industrial Immunity
EN 61326; Meas./Control/Lab.,
Industrial Requirements
EN 61000-6-2; Industrial Immunity
EN 61000-6-4; Industrial Emissions
(4)
C-Tick
Australian Radiocommunications Act,
compliant with:
AS/NZS 2064; Industrial Emissions
(1)
This specification represents the maximum LTD input resolution that the 1756-HYD02 module can accept. The
module does not require that you connect an LDT with this level of resolution.
(2)
Maximum wire size requires the extended-depth RTB housing (1756-TBE).
(3)
Use the conductor category information for planning conductor routing as described in the system level
installation manual.
(4)
Refer to Industrial Automation Wiring and Grounding Guidelines, publication number 1770-4.1.
(5)
See the Product Certification link at www.ab.com for Declarations of Conformity, Certificates, and other
certification details.
Publication 1756-UM525A-EN-P - June 2003 85
Page 86

Appendix A Specifications
Notes:
86 Publication 1756-UM525A-EN-P - June 2003
Page 87

Glossary
Broadcast
Data transmissions to all address or functions
Bumpless reconfiguration
A reconfiguration in which the real time data connection to the module is not
closed and reopened. Communications are never interrupted and
configuration data is applied to the module immediately. This works best in a
single owner-controller system.
Compatible match
An electronic keying protection mode that requires that the physical module
and the module configured in the software to match according to vendor and
catalog number. In this case, the minor revision of the module must greater
than or equal to that of the configured slot.
Connection
The communication mechanism from the controller to another module in the
control system.
ControlBus
The backplane used by the 1756 chassis.
ControlLogix chassis
Hardware assembly that houses devices such as ControlLogix Hydraulic Servo
modules, ControlLogix controllers and power supplies.
ControlLogix controller
Controller used in the ControlLogix system that uses programmable memory
for storage of data to implement specific functions such as I/O control, logic,
timing and data file manipulation. The ControlLogix controller owns and
communicates with the ControlLogix Hydraulic Servo module to control
hydraulic applications.
ControlLogix power supply
An electrical circuit that filters, conditions and supplies appropriate voltages
for system components and circuitry.
Publication 1756-UM525A-EN-P - June 2003 87
Page 88

Glossary
Disable keying
An electronic keying protection mode that requires no attributes of the
physical module and the module configured in the software to match
Download
The process of transferring the contents of a project on the workstation into
the controller
Electronic keying
A feature where modules can be requested to perform an electronic check to
make sure that the physical module is consistent with what was configured by
the software
Exact match
An electronic keying protection mode that requires the physical module and
the module configured in the software to match according to vendor, catalog
number, major revision and minor revision
Field side
Interface between user field wiring and I/O module
Inhibit
A ControlLogix process that allows you to configure the Hydraulic Servo
module but prevent it from communicating with the owner-controller. In this
case, the controller behaves as if the module does not exist at all
Interface module (IFM)
A module that uses prewired cable to connect wiring to an I/O module
Linear displacement transducer (LDT)
Feedback device connected to the ControlLogix Hydraulic Servo module that
provides axis position data. Any LDT used with the ControlLogix Hydraulic
Servo module should use an external interrogation signal.
88 Publication 1756-UM525A-EN-P - June 2003
Page 89

Glossary
Major revision
A module revision that is updated any time there is a functional change to the
module
Minor revision
A module revision that is updated any time there is a change to the module
that does not affect its function or interface
Owner-controller
The controller that creates and stores the primary configuration and
communication connection to a module
Position loop
Part of motion control firmware responsible for:
· comparing measured position with command position to determine a
position error
and
· generating a signal to an actuator to reduce any position error that may
occur.
Program Mode
In this mode the following events occur:
· Controller program is not executing.
· Inputs are still actively producing data.
· Outputs are not actively controlled and go to their configured program
mode
Removal and insertion under power (RIUP)
ControlLogix feature that allows a user to install or remove a module or RTB
while power is applied
Removable Terminal Block (RTB)
Field wiring connector for I/O modules
RSLogix 5000
Programming software used to configure and troubleshoot the ControlLogix
Hydraulic Servo module.
Publication 1756-UM525A-EN-P - June 2003 89
Page 90

Glossary
Run mode
In this mode, the following events occur:
· Controller program is executing
· Inputs are actively producing data.
· Outputs are actively controlled
Service
A system feature that is performed on user demand, such as fuse reset or
diagnostic latch reset
Status indicators
Indicators on the front of the ControlLogix Hydraulic Servo module that
display the general status of the module and specific status of individual
feedback and drive conditions for the axes connected to the module.
System side
Backplane side of the interface to the I/O module
Tag
A named area of the controller’s memory where data is stored
90 Publication 1756-UM525A-EN-P - June 2003
Page 91

Index
Numerics
1756-SYNCH module
Using with the 1756-HYD02 module
A
Agency approvals 11
Axes properties
Configuring in RSLogix 5000
65
tion
60
60
61
59
59
64
64
74
74
74
74
74
74
58
58
58
58
58
67
67
52
60
61
60
60
62
60
Conversion tab
Conversion constant
Positioning mode
Dynamics tab
Maximum acceleration
Maximum deceleration
Maximum velocity
Fault actions tab
Drive fault
Feedback
Feedback noise
Position error
Soft overtravel
Feedback tab
Absolute feedback offset
Calibration constant
LDT type
Length
Recirculations
Scaling
Gains tab
Feedforward gains-acceleration
Feedforward gains-velocity
Integrator hold
Manual tune
Position gains-differential
Position gains-integral
Position gains-proportional
General tab
Homing tab
Active home sequence group-direc-
Limit switch
Mode
Offset
Position
Return speed
Sequence
Speed
59
58
64
64
66
36
59
67
67
66
9
67
Hookup tab
Limits tab
Motion planner tab
Offset tab
Output tab
Servo tab
Tag tab
Tune tab
Units tab
62
Feedback polarity
Output polarity
Test increment
62
62
62
70
Output limit
Position error tolerance
Position lock tolerance
Soft travel limits
Soft travel limits-maximum negative
Soft travel limits-maximum positive
71
71
71
70
70
70
54
Master delay compensation
Master position filter bandwidth
Output cam execution targets
Program stop action
54
72
Backlash compensation-reversal off-
73
set
Backlash compensation-stabilization
window
Friction/deadband compensa-
tion-friction compensation
Friction/deadband compensa-
tion-window
Output offset
Velocity offset
73
72
74
73
68
Direction scaling ratio
Low-pass output filter bandwidth
Velocity scaling
69
68
57
Direct drive ramp rate
Drive fault input
External drive configuration
Loop configuration
Real time information
57
57
57
57
76
63
Direction
Speed
Travel limit
63
63
63
56
Average velocity timebase
Position units
56
55
55
54
72
69
57
56
Publication 1756-UM525A-EN-P - June 2003 91
Page 92

Index
C
Cage clamp RTB 16
Class I Division 2 compliance
Configurable features of the 1756-HYD02
module
Axes features
General module features
Configuration
Configuring the axes features
Dynamic reconfiguration
Editing configuration
Overview of the process
Reconfiguring parameters in program
Reconfiguring parameters in run mode
Using RSLogix 5000
mode
52-76
38-39
39
31-40
11
42-51
36
38
32
39
D
Documentation
For other ControlLogix products used with
the 1756-HYD02 module
Dynamic reconfiguration
38
8
E
Electronic keying 34, 44-??
Electrostatic discharge (ESD)
Preventing
Extended-depth housing for RTBs
Cabinet size considerations
12
24
25
I
Inhibiting the module 35
Interface module (IFM)
10, 16
K
Keying
Electronic
Mechanical 15
34, 44-??
L
Linear displacement transducer (LDT) 9
Connecting the LDT to the 1756-HYD02
21-22
module
M
Mechanical keying 15
Module identification information
Retrieving
43
O
OK contact wiring 20
P
Physical features of the 1756-HYD02
module
Preventing electrostatic discharge (ESD)
12
10-11
F
Fault reporting 43
Registration sensor wiring 19
Removable terminal block (RTB)
H
Home limit switch input wiring 20
92 Publication 1756-UM525A-EN-P - June 2003
R
10
Assembling
Cage clamp
Installation
Mechanically keying the RTB
Removal
Spring clamp
Types available with the 1756-HYD02
23
16
26-27
28
17
module
15
16
Page 93

Index
Removal and insertion under power
(RIUP)
12, 14
mode
76
63
56
81-82
31-40
36
59
64
34
74
58
65
52
60
62
70
54
72
68
39
57
RSLogix 5000
Configuring the axes features
Conversion tab
Dynamics tab
Electronic keying
Fault actions tab
Feedback tab
Gains tab
General tab
Homing tab
Hookup tab
Limits tab
Motion planner tab
Offset tab
Output tab
Reconfiguring parameters in program
Reconfiguring parameters in run mode
Servo tab
Tag tab
Tune tab
Units tab
Using the software in troubleshooting
S
Servo update period 42
Specifications
83-85
39
Spring clamp RTB
Status indicators
Drive indicator
Feedback (FDBK) indicator
OK indicator
17
11, 77-80
80
79
78
T
Troubleshooting 77-82
Fault reporting
Status indicators
Drive indicator
Feedback (FDBK) indicator
OK indicator
Using RSLogix 5000
43
11, 77-80
80
78
81-82
W
Wiring connections 16-22
Choosing the extended-depth housing
Connecting LDTs to the 1756-HYD02
21-22
module
Example diagram of 1756-HYD02 wiring
18
Home limit switch input
OK contacts
Recommendations for wiring RTBs
Registration sensors
Using the cage clamp RTB
Using the spring clamp RTB
20
20
19
16
17
79
24
17
Publication 1756-UM525A-EN-P - June 2003 93
Page 94

Index
94 Publication 1756-UM525A-EN-P - June 2003
Page 95

How Are We Doing?
Your comments on our technical publications will help us serve you better in the future.
Thank you for taking the time to provide us feedback.
You can complete this form and mail (or fax) it back to us or email us at
RADocumentComments@ra.rockwell.com.
Pub. Title/Type ControlLogix Hydraulic Servo Module
Cat. No.
1756-HYD02
Pub. No. 1756-UM525A-EN-P Pub. Date June 2003 Part No. 957678-84
Please complete the sections below. Where applicable, rank the feature (1=needs improvement, 2=satisfactory, and 3=outstanding).
Overall Usefulness 1 2 3 How can we make this publication more useful for you?
Completeness
(all necessary information
is provided)
Technical Accuracy
(all provided information
is correct)
1 2 3 Can we add more information to help you?
procedure/step illustration feature
example guideline other
explanation definition
1 2 3 Can we be more accurate?
text illustration
(all provided information is
Clarity
easy to understand)
Other Comments You can add additional comments on the back of this form.
Your Name
Your Title/Function Would you like us to contact you regarding your comments?
Location/Phone
Return this form to: Rockwell Automation Technical Communications, 1 Allen-Bradley Dr., Mayfield Hts., OH 44124-9705
Publication CIG-CO521D-EN-P- July 2007
1 2 3 How can we make things clearer?
___No, there is no need to contact me
___Yes, please call me
___Yes, please email me at _______________________
___Yes, please contact me via _____________________
Fax: 440-646-3525 Email: RADocumentComments@ra.rockwell.com
Page 96

Other Comments
PLEASE FASTEN HERE (DO NOT STAPLE)
PLEASE FOLD HERE
BUSINESS REPLY MAIL
FIRST-CLASS MAIL PERMIT NO. 18235 CLEVELAND OH
POSTAGE WILL BE PAID BY THE ADDRESSEE
NO POSTAGE
NECESSARY
IF MAILED
IN THE
UNITED STATES
PLEASE REMOVE
1 ALLEN-BRADLEY DR
MAYFIELD HEIGHTS OH 44124-9705
Page 97

Page 98

Rockwell Automation
Support
Rockwell Automation provides technical information on the Web to assist you in
using its products. At
manuals, a knowledge base of FAQs, technical and application notes, sample code and
links to software service packs, and a MySupport feature that you can customize to
make the best use of these tools.
For an additional level of technical phone support for installation, configuration, and
troubleshooting, we offer TechConnect support programs. For more information,
contact your local distributor or Rockwell Automation representative, or visit
http://support.rockwellautomation.com
http://support.rockwellautomation.com
.
, you can find technical
Installation Assistance
If you experience a problem within the first 24 hours of installation, please review the
information that's contained in this manual. You can also contact a special Customer
Support number for initial help in getting your product up and running.
United States 1.440.646.3434
Monday – Friday, 8am – 5pm EST
Outside United
States
Please contact your local Rockwell Automation representative for any
technical support issues.
New Product Satisfaction Return
Rockwell Automation tests all of its products to ensure that they are fully operational
when shipped from the manufacturing facility. However, if your product is not
functioning and needs to be returned, follow these procedures.
United States Contact your distributor. You must provide a Customer Support case
number (call the phone number above to obtain one) to your distributor
in order to complete the return process.
Outside United
States
Please contact your local Rockwell Automation representative for the
return procedure.
Publication 1756-UM525A-EN-P - June 2003 98 PN 957678-84
Copyright © 2003 Rockwell Automation, In c. All rights reserved. Printed in the U.S.A.
 Loading...
Loading...