

gsk GSK GHBus AC User Manual
This user manual describes all proceedings concerning the
operations of this Drive Unit in detail as much as possible. However, it is
impractical to give particular descriptions for all unnecessary or unallowable
system operations due to the manual text limit, product specific applications
and other causes. Therefore, the proceedings not indicated herein should
be considered impractical or unallowable.
This user manual is the property of GSK CNC Equipment Co., Ltd.
All rights are reserved. It is against the law for any organization or individual
to publish or reprint this manual without the express written permission of
GSK and the latter reserves the right to ascertain their legal liability.

GH Series Bus AC Servo Drive Unit User Manual
PREFACE
Your Excellency,
It’s our pleasure for your patronage and purchase of this
GH2000/GH3000 Series Bus High-speed & High-accuracy Full Digit AC
Servo Drive Unit made by GSK CNC Equipment Co., Ltd.
This manual is entirely described the installation, wiring, operation and
debugging etc. of the GH2000/GH3000 Series Servo Drive Unit, which provides the
desired knowledge and precautions for using this drive unit; it is better to
operated machine after comprehending the safety precautions.
Adequately play the function of the GH2000/GH3000 Series Servo Drive Unit,
and ensure the safety. It is necessary to carefully read this manual before
operating this machine, and correctly use this drive unit based upon the
precautions and operation methods.
All improvements, specifications and the version update herein are subject
to change without further notice.
We do not assume any responsibilities for the change of the product by
user; therefore the warranty sheet will be void for this change.
Chinese version of all technical documents in Chinese and English languages
is regarded as final.
II

Safety Warning and Responsibility
SAFTY WARNING
To avoid the personal injury of the operators and others, as well the damage of
the mechanical equipments, pay more attention to the following warning flags when
reading this User Manual:
That the flags shown in the following items are the
danger levels during the operation, which is related with
the description of the operation safety flag. And
therefore, the contents are extremely important, and the
user should abide by it.
Danger
!
Caution
!
Notice
The severe injury or death may occur if the approved instruction
does not perform.
The secondary or light wound, as well the loss of the material
may occur if the approved instruction does not perform.
Unexpected results and states may occur if this Notice is
ignored.
It reminds user that the vital requirements and important
instructions are shown
III
GH Series Bus AC Servo Drive Unit User Manual
The following marks are indicated that the operations
should be performed or can not be performed:
means forbidden (it cannot be performed)
!
means enforced (it must be performed)
IV
Safety Warning and Responsibility
Danger
!
Confirm whether the
input power is power off
before wiring.
The electric shock may
occur if the approved
! !
instruction is not observed
Install the breaker,
interference filter and AC
reactor
The thundernstrike,
malfunction or damage
may occur if the approved
instruction is not observed.
It is better to wire or
detect by the
professional electrical
engineer
The electric shock or fire
may occur if the approved
! !
instruction is not obser ved
The movement, wiring,
detection or maintenance can
be performed after the power
is turned off for 10 minutes.
The electric shock may
occur if the approved
instruction is not obser ved.
The grounding terminal
PE of the servo unit
should be earthed.
The electric shock may
occur if the approved
! !
instruction is not observ ed
Install the ESP switch
The personal injury,
malfunction and machine
damage may occur if the
approved instruction is not
observed.
Do not operate the
switch with wet hands!
The electric shock may
occur if the approved
instruction is not observ ed.
Do not stretch your hands
into the servo unit!
The electric shock may
occur if the approved
instruction is not obse rved.
Do not open the cover of
the terminal block when
the power is turned on or
operated!
The electric shock may
occur if the approved
instruction is not observed.
Do not touch the main
circuit wiring terminal
directly!
The electric shock may
occur if the approved
instruction is not observed.
V
GH Series Bus AC Servo Drive Unit User Manual
Caution
!
It is necessary to connect
the wiring between the
drive unit and motor based
upon the wiring scheme
The equipment may be
! !
damaged if the approved
instruction is not observed.
The voltage level loaded
on each terminal only can
be used the one described
in this manual.
The equipment may be
damaged if the approved
instruction is not observed.
The load can be performed
only when the dry run of
the motor is executed.
The equipment may be
! !
damaged if the approved
instruction is not observed.
Firstly remove the alarm,
and then perform the
machine when the alarm
occurs.
The equipment may be
damaged if the approved
instruction is not observed.
It is essential to connect the
brake resistance based upon
the wiring scheme.
The motor should be
adapted with the appropriate
servo motor.
The equipment may be
! !
damaged if the approved
instruction is not observed.
The equipment may be
damaged if the approved
instruction is not observed.
Never attempt to modify,
disassemble or repair the
drive unit privately.
The equipment may be
damaged if the approved
instruction is not observed.
Do not hold the cable and
motor shaft during the
transportation of the motor.
The equipment may be
damaged if the approved
instruction is not observed.
Do not touch the motor and
brake resistance, as well the
radiating equipment, due to the
high temperature may occur.
The scald may be caused
if the approved instruction
is not observed.
Do not adjust and modify
the parameter extremely.
The equipment may be
damaged if the approved
instruction is not observed.
VI
Safety Warning and Responsibility
Caution
!
Do not connect the power
input cables R, S and T on
the U, V and W terminals of
the motor output cable!
The equipment may be
damaged if the approved
instruction is not observed.
If the components of the
spindle unit is absent or being
damaged, it is important to
touch the seller immediately
before operating.
The equipment may be
damaged if the approved
instruction is not observed.
Do not repeatedly used the
wasted internal electric
components of the drive unit,
and it only can be treated as
the industry trash!
The unexpected behave
may occur if the approved
instruction is not observed.
Do not frequently switch
on/off the input power!
The equipment may be
damaged if the approved
instruction is not observed.
VII

GH Series Bus AC Servo Drive Unit User Manual
Safety Precaution
■ Transportation and storage
The pile of the packing cantons should be less than 6 layers.
Do not climb, stand, as well as put the heavy materials on the product.
Do not use the conjoined cable with this product to drag or move the
machine.
Do not crash or scratch the panel and the screen.
Avoid damp, sunshine and rain for the product packing
■ Unpacking detection
Confirm whether the product is your purchased one after opening the
packing.
Check whether the product is being damaged during the transportation.
Check whether each accessory is prepared or being damaged comparing
the packing list.
Touch our company immediately if the product type is not matched with
the packing list or the components are absent or being damaged during
transportation.
■ Wiring
The wiring and detection should be performed by the corresponding
professional.
The product should be grounded stably, and its grounding resistance
should be less than 0.1Ω. Do not replace the grounding wire by the neutral
cable (zero).
The wiring should be correct and firm, so that the product malfunction or
unexpected result may occur
The surge absorb diode of the product should be connected based upon
the specified direction; otherwise, the product may be damaged.
The power should be turned off before plug-in/out or opening the case of
the product.
■ Maintenance
It is necessary to cut off the power before maintaining or changing the
components.
VIII

Safety Warning and Responsibility
Check the malfunction when the short-circuit or overload occurs; the
machine can be restart again after the malfunction removes.
Do not frequently power on/off. The power should be turned on again after
1min. at least.
Security Responsibility
Security responsibility of the manufacturer
——Manufacturer should take responsibility for the design and structure danger of the
motor and the accessories which have been eliminated and/or controlled.
——Manufacturer should take responsibility for the security of the motor and
accessories.
——Manufacturer should take responsibility for the offered information and
suggestions for the user.
Security responsibility of the users
——User should know and understand about the contents of security operations by
learning and training the security operations of the motor.
——User should take responsibility for the security and danger because of increasing,
changing or modifying the original motor or accessory by themselves.
——User should take responsibility for the danger without following the operations,
maintenances, installations and storages described in the manual.
This manual is reserved by final user.
We are full of heartfelt gratitude to you for supporting us in the use of GSK’s
products.
IX

GH Series Bus AC Servo Drive Unit User Manual
CONTENT
1 BRIEF························································································································ 1
1.1 Product Brief································································································································· 1
1.1.1 Product Character ················································································································· 1
1.1.2 Use Area ································································································································ 1
1.1.3 Product Appearance ·············································································································· 2
1.2 Product Technical Specification···································································································· 2
1.2.1 Technical Specification of the Drive Unit ··············································································· 2
1.2.2 The Technical Specification of the Servo Motor ···································································· 4
2 INSTALLATION ········································································································11
2.1 Ambinet Condition ·······················································································································11
2.2 The Installation of the Drive Unit ································································································ 12
2.2.1 Installation Ambient·············································································································· 12
2.2.2 Installation Dimension ········································································································· 12
2.3 Servo Motor Installation ················································································································ 15
2.3.1 Installation Ambient·············································································································· 15
2.3.2 Installation Dimension ········································································································· 16
3 WIRING··················································································································· 21
3.1 Peripheral Equipment Connection······························································································ 22
3.1.1 The Explanation of the Wiring port ······················································································ 22
3.1.2 Peripheral Equipment Connection Diagram ········································································ 22
3.2 Bus Connection ·························································································································· 24
3.3 Motor Interface Connection ········································································································ 27
3.3.1 Motor Power and Brake Wiring···························································································· 27
3.3.2 Encoder Wiring ···················································································································· 28
3.4 Battery Connection····················································································································· 29
4 DEBUGGEING ········································································································ 31
4.1 Parameter Explanation··············································································································· 31
4.1.1 Parameter List ····················································································································· 31
4.1.2 Parameter Significant Details ······························································································ 34
4.1.3 The Code Explanation of the Servo Motor Type ································································· 38
4.2 Display Operation······················································································································· 39
4.2.1 Key Explanation··················································································································· 39
4.2.2 Main Menu Explanation ······································································································· 40
4.2.3 Monitoring Menu Explanation······························································································40
4.2.4 User Shortcut Password······································································································ 42
X
Content
4.2.5 Parameter Management······································································································ 43
4.3 Function Debugging ··················································································································· 45
4.3.1 Sr Dry Run··························································································································· 45
4.3.2 JOG Operation ···················································································································· 46
4.3.3 Motor Type Write-in ············································································································· 46
4.3.4 Motor Zeroing ······················································································································ 47
5 ALARM AND TROUBLESHOOTING ·······································································49
5.1 Alarm List ··································································································································· 49
5.2 Alarm Troubleshooting ··············································································································· 50
6 ORDERING INSTRUCTION ····················································································55
6.1 The Selection of the Drive Unit ·································································································· 55
6.1.1 The Type Explanation of the Drive Unit··············································································· 55
6.1.2 The Comparison Table of the Drive Unit Adapted Motor····················································· 55
6.2 The Selected Servo Motor ········································································································· 56
6.2.1 The Type Explanation of the Servo Motor ··········································································· 56
6.3 The Selection of the Cable and Connector ················································································ 57
6.3.1 The Specification and Type of the Cable and Connector···················································· 57
6.4 The Selection of the Peripheral Equipment ··············································································· 57
6.4.1 Brake Resistance (Necessary equipment)·········································································· 57
6.4.2 Breaker and Contactor (Necessary equipment)·································································· 58
6.4.3 Three-phase AC Filter (Recommended equipment) ··························································· 59
6.4.4 Insulation Transformer (Necessary equipment) ·································································· 60
6.4.5 AC Reactor (Recommended Equipment)············································································ 63
XI


Chapter One Brief
1 BRIEF
1.1 Product Brief
The GH2000/GH3000 Series Bus AC Servo Drive Unit (It is the one
high-accuracy and high-speed full digit AC servo drive unit) is the updated
developed one based upon the GSK-Link Ethernet Bus Agreement of our company,
which provides a reliable drive control of the AC servo motor with the absolute
encoder.
1.1.1 Product Character
It uses the GSK-Link Ethernet bus communication method; and its data transmission
rate can be performed up to about 100Mbits/s; the on-line data real-time
uploading/downloading can be carried out.
It uses the servo motor installed with the absolute encoder, and its encoder number
can be set from17 to 28.
One interface supports variable encoder agreed communications, for example,
TAMAGAWA, HEIDEHAIN, DANAHER, and NIKON.
Intelligently identify the motor’s type; the SJT (A4) series servo motor type or the
default parameter call can be identified after the power is turned on.
There are two kinds power mode selection, one is that the GH3000 series uses
AC380V; the other is that the GH2000 uses AC220V.
Multiple power selection, the power module 30A/50A/75A/100A/150A can be
selected.
1.1.2 Use Area
It can be used in these areas, such as the mechanical manufacture, CNC machine,
printing & packing machine, spinning machine, robot and the automatic assembly line.
1
GH Series Bus AC Servo Drive Unit User Manual
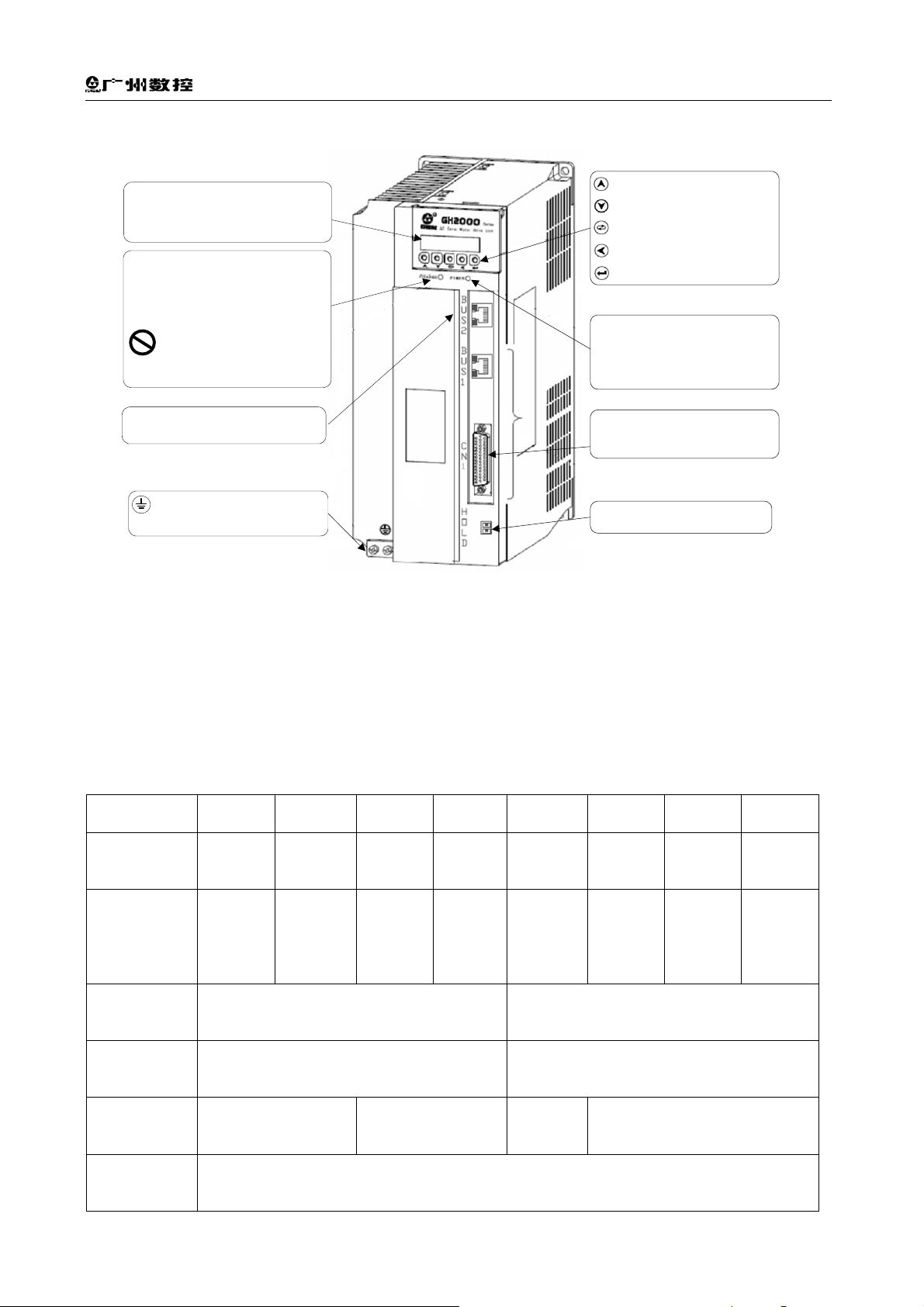
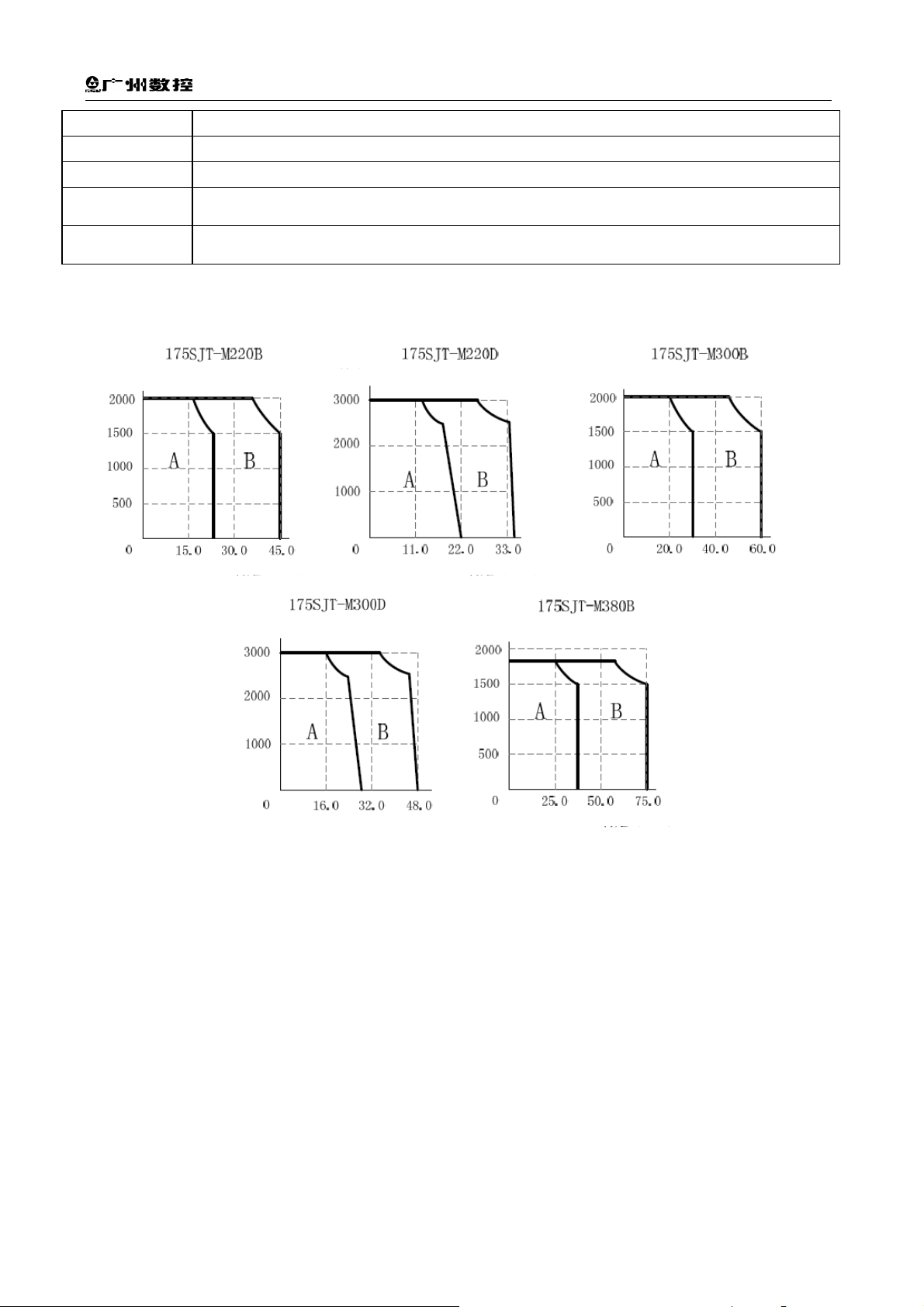
1.1.3 Product Appearance
LED monitoring window
The state monitoring and the
modification and administration of
the parameter can be performed.
‘CHARGE’is the high-pressure
Indicator
indicator of the servo unit main
circuit DC bus.
ON: The DC bus is with the high
pressure voltage.
OFF: The DC bus is already
discharged.
When the‘CHARGE’ Indicator
is ON, the assemble or disassemble
of the servo unit or the power cable,
motor and the brake resistance
cable can not be performed.
‘BUS1/BUS2’is the communication
bus interface of the Ethernet.
The grounding terminals of the
input power and the motor
protection one
Fig. 1-1 Product appearance
Parameter series No. or value adds, or
the menu pages up
Parameter series No. or value reduces,
or the menu pages down.
Circularly move the modified data bit
Return to the previous operation menu
or cancel it
Enter the next operation menu or
confirm it.
‘POWER’is the power
Indicator
indicator of the servo unit
control circuit.
ON: Normal.
OFF: Power-down
‘CN1’ is the servo unit
encoder feedback input (high
density DB26 socket)
‘Hold’ is the brake output
terminal
1.2 Product Technical Specification
1.2.1 Technical Specification of the Drive Unit
Table 1-1 The main technical specification parameter of the drive unit
Drive unit type
IPM module
power (A)
Adapted
servo motor
rated current
(A)
Main circuit
power
Control circuit
power
GH2030 GH2050 GH2075 GH2100 GH3048 GH3050 GH3075 GH3100
30 50 75 100 50 50 75 100
4<I≤6 7<I≤10 10<I≤15
15<
I≤29
4<I≤6 7<I≤10
Three-phase, AC 220V Three-phase, AC 380V
Single-phase, AC 220V Single-phase, AC 380V
10<
I≤15
15<
I≤29
Brake
resistance
Control
method
2
Three-phase full-wave rectification IGBT PWN sine wave drive
Built-in
External needed
(without built-in)
Built-in
External needed (without
built-in)
Chapter One Brief
Feedback
method
Communicat
ion method
Speed
frequency
response
Speed-regul
ation ratio
The least
speed control
PID
response
frequency
17-bit absolute encoder (It is compatible with TAMAGAWA, HEIDEHAIN,
DANAHER, and NIKON)
GSK-LINK bus communication method: the Max. connection number: 254 axes; the
data transmission ratio: 100Mbits/s
≥200Hz
1: 60000
±0.1r/min
Velocity loop: 10KHz Current loop: 10KHz
Working
method
Working
ambient
temperature
Working
ambient
humidity
Vibration-res
istance/impa
ct-resistance
Protective
function
Manual, JOG, external velocity (Bus agreement)
Working temperature: 0℃~+40℃ Storage temperature: -40℃~+70℃
Less than 90% (No condensation)
Less than 0.5G (4.9m/s
2
)(Discontinuous operation in the 10Hz~60Hz)
Overspeed, overpressure, main circuit open-phase, power module failure,
underpressure, overload, overheat, brake abnormal, encoder abnormal, encoder
communication failure, motor type setting enabled, control power abnormal etc.
Monitoring
Motor speed, encoder feedback single-circle value/multiple-circle value, motor
current, operation state, CUP use rate, Ethernet state, speed command value, alarm
function
prompt.
Display
6-digit LED Nixie tube, 5 keys.
operation
3
GH Series Bus AC Servo Drive Unit User Manual
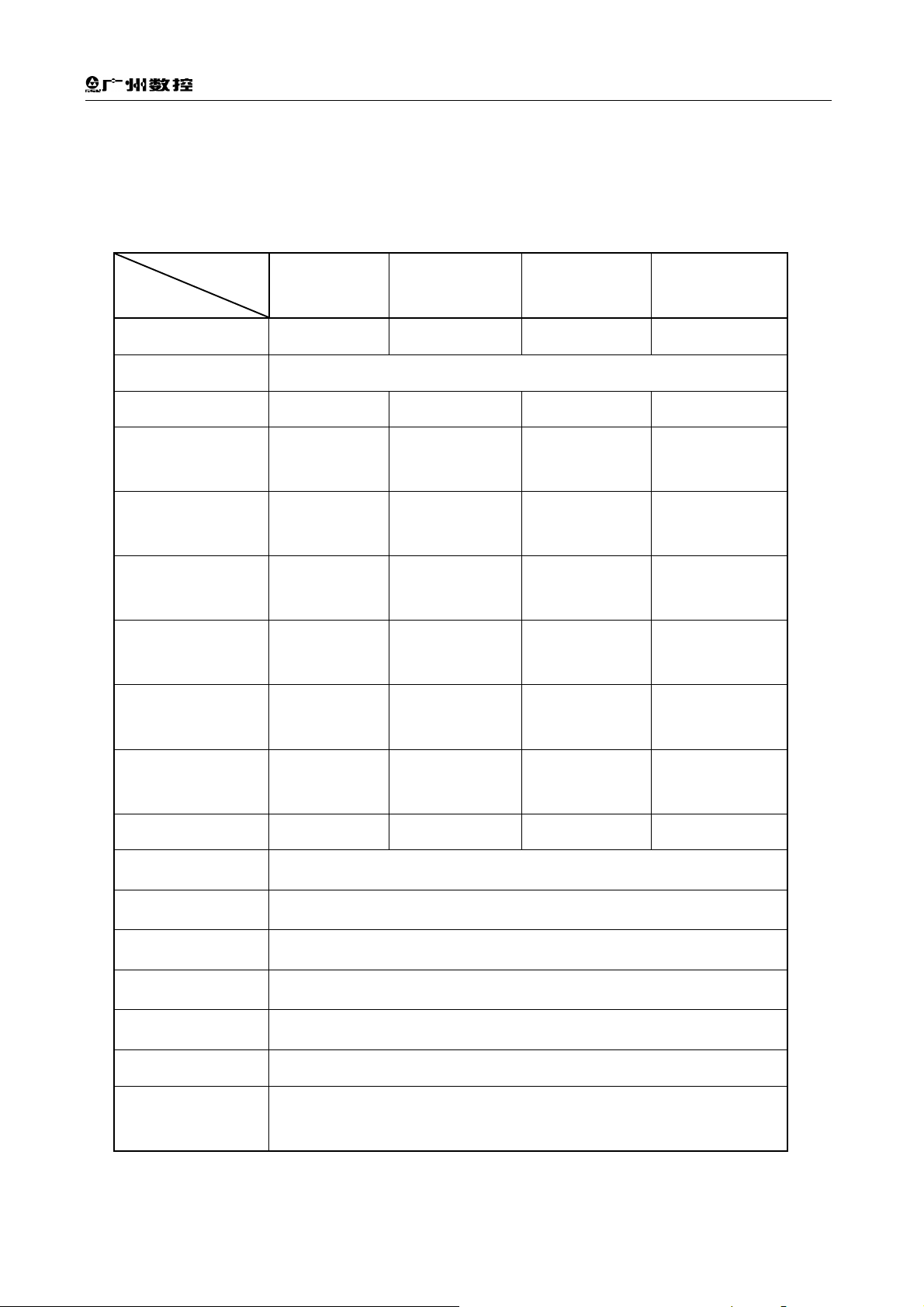
1.2.2 The Technical Specification of the Servo Motor
Table 1-2 The technical parameter of 80 series motor
Type
Item
Rated power (kW) 0.5 0.75 0.66 1.0
Polar logarithm 4
Rated current (A) 3 4.8 5 6.2
80SJT-M024C 80SJT-M024E 80SJT-M032C 80SJT-M032E
Zero speed torque
2.4 2.4 3.2 3.2
(N.m)
Rated torque
2.4 2.4 3.2 3.2
(N.m)
The Max. torque
7.2 7.2 9.6 9.6
(N.m)
Rated speed
2000 3000 2000 3000
(r/min)
The Max. speed
2500 4000 2500 4000
(r/min)
Inertia of moment
0.83×10-4
0.83×10-4 1.23×10-4 1.23×10-4
(kg·m2)
Weight (kg) 2.8 2.9 3.4 3.5
Insulation level
F(GB 755—2008)
Vibration level
Defense level
Installation type
Working system
R(GB 10068—2008)
IP65(GB 4208—2008/IEC 60529:2001,GB/T 4942.1—2006)
IMB5(Flange installation)(GB/T 997—2008 / IEC 60034-7:2001)
S1(Consecutive working system)(GB 755—2008)
Power-down brake Not available
Increment 2500p/r, 5000p/r etc., absolute encoder 17 bit single circle
Adapted encoder
or multiple circles
4
Chapter One Brief
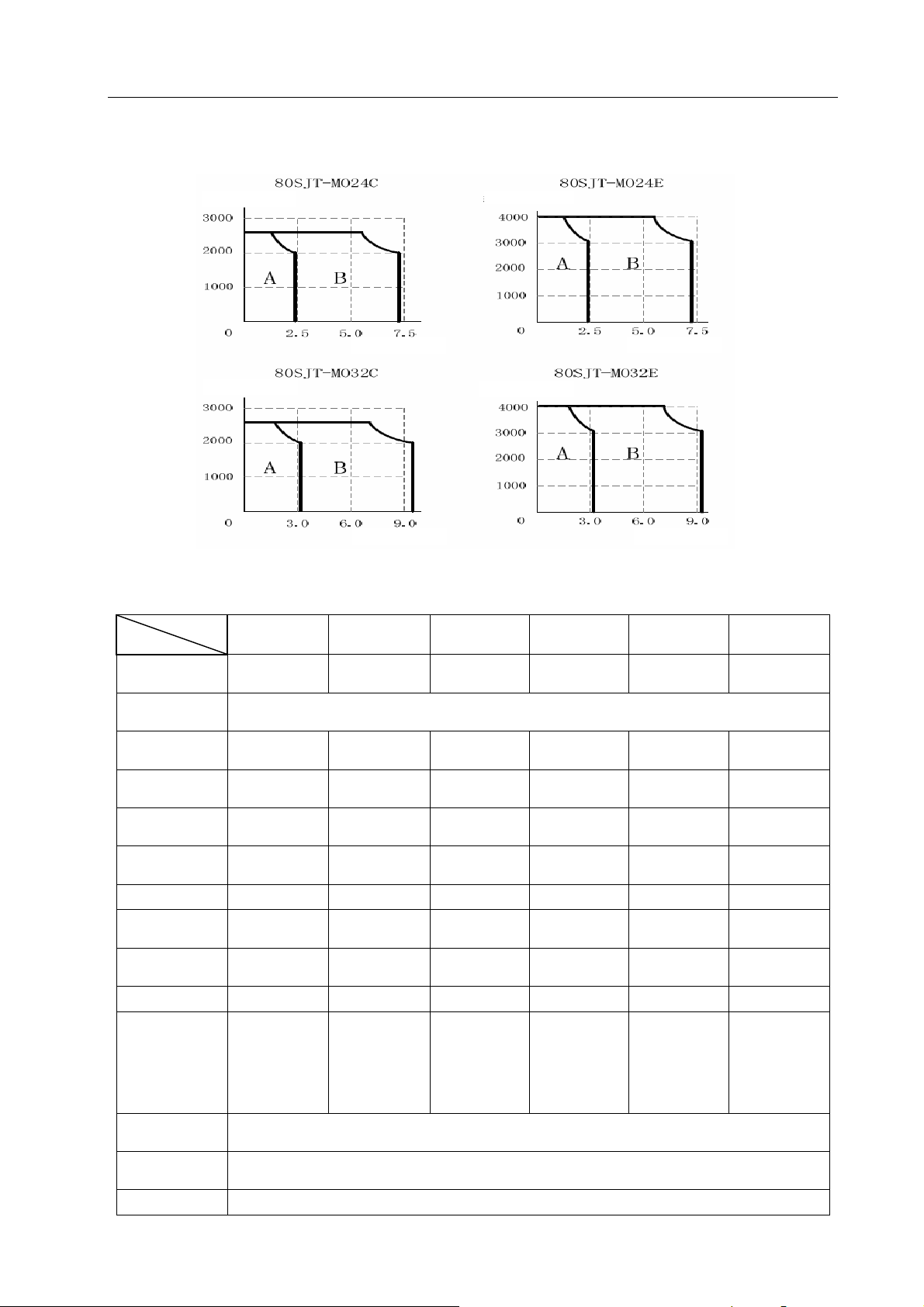
)
The torque-speed character figure (T – M) of the servo motor is shown below:
A: Continuous working area B: Short time working area
Speed (r/min)
Torque (N.m)
Speed (r/min)
Torque (N.m) Torque (N.m)
Speed (r/min
Torque (N.m)
Speed (r/min)
Table 1-3 The technical parameter of 110 series motor
Type
Item
Rated power
(kW)
Polar
logarithm
Rated
current (A)
Zero speed
torque (N.m)
Rated torque
(N.m)
The Max.
torque (N.m)
110SJT-M 040D 110SJT-M 040E 110SJT-M 060D 110SJT-M 060E 130SJT-M 040D 130SJT-M 050D
1.0 1.2 1.5 1.8 1.0
1.3
4
4.5 5 7 8 4
4 4 6 6
4 4 6 6 4
12 10 12 12 10
5
5
5
12.5
Rated speed 2500 3000 2500 3000 2500 2500
The Max.
speed
Inertia of
moment
3000 3300 3000 3300 3000 3000
0.68×10-3 0.68×10-3 0.95×10-3 0.95×10-3 1.1×10-3 1.1×10-3
Weight (kg) 6.1 6.1 7.9 7.9 6.5 6.5
The motor
weight with
the
7.7 7.7 9.5 9.5 8.1 8.1
power-down
brake (kg)
Insulation
level
Vibration
level
Defense
B(GB 755-2008)
R(GB 10068-2008)
IP65(GB/T4942.1-2006)
5
GH Series Bus AC Servo Drive Unit User Manual
)
level
Installation
type
Working
system
Adapted
encoder
IMB5(Flange installation)(GB/T 997-2008 / IEC 60034-7:2001)
S1(Consecutive working system)(GB 755-2008)
Increment 2500p/r, 5000p/r etc., absolute encoder 17 bit single circle or multiple
circles
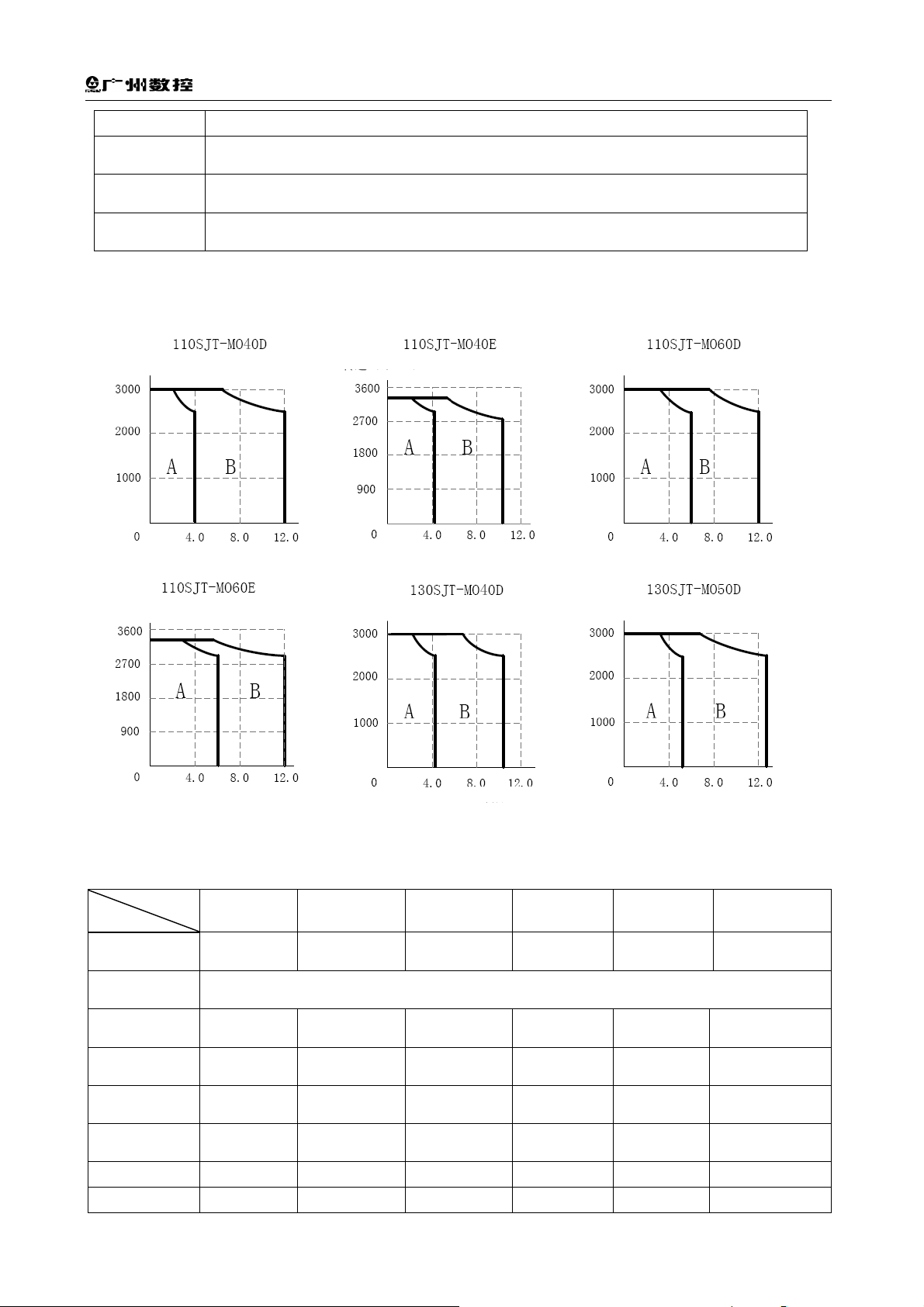
The torque-speed character figure (T – M) of the servo motor is shown below:
A: Continuous working area B: Short time working area
Speed (r/min)
Speed (r/min)
Torque (N.m)
Torque (N.m)
Speed (r/min
Speed (r/min)
Torque (N.m)
Torque (N.m)
Speed (r/min)
Torque (N.m)
Speed (r/min)
Torque (N.m)
Table 1-4 The main technical parameter of the 130SJT series motor (to be continued table 1-3)
Type
Item
Rated power
(kW)
Polar
logarithm
Rated
current (A)
Zero speed
(N.m)
Rated torque
(N.m)
The Max.
torque (N.m)
130SJT-M 060D 130SJT-M 075D 130SJT-M 100B 130SJT-M 100D 130SJT-M 150B 130SJT-M 150D
1.5 1.88 1.5 2.5 2.3
3.9
4
6 7.5 6 10 8.5 14.5
6 7.5 10 10 15 15
6 7.5 10 10 15 15
18 20 25 25 30 30
Rated speed 2500 2500 1500 2500 1500 2500
The Max.
6
3000 3000 2000 3000 2000 3000
Chapter One Brief
speed
Inertia of
moment
Weight (kg) 7.2 8.1 9.6 9.7 11.9 12.7
The motor
weight with
the
power-down
brake (kg)
Insulation
level
Vibration
level
Defense
level
Installation
type
Working
system
Adapted
encoder
1.33×10-3 1.85×10-3 2.42×10-3 2.42×10-3 3.1×10-3 3.6×10-3
10.1 11 12.5 12.6 14.8 15.6
B(GB 755-2008)
R(GB 10068-2008)
IP65(GB/T4942.1-2006)
IMB5(Flange installation)(GB/T 997-2008 / IEC 60034-7:2001)
S1(Consecutive working system)(GB 755-2008)
Increment 2500p/r, 5000p/r etc., absolute encoder 17bit single circle or multiple
circles
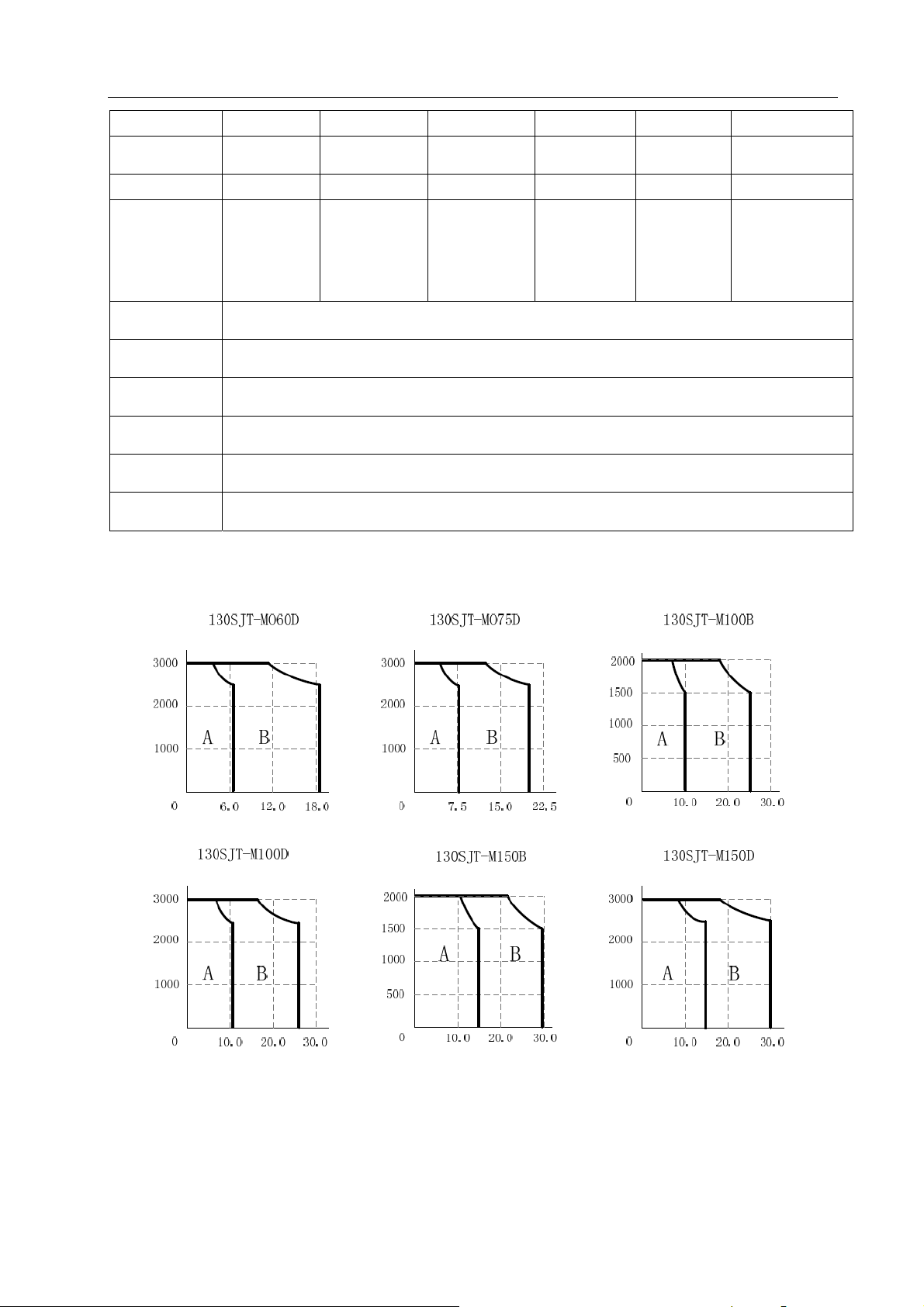
The torque-speed character figure (T – M) of the servo motor is shown below:
A: Continuous working area B: Short time working area
Speed (r/min)
Speed (r/min)
Torque (N.m)
Speed (r/min)
Torque (N.m)
Speed (r/min)
Speed (r/min)
Speed (r/min)
Torque (N.m)
Torque (N.m)
Torque (N.m)
Torque (N.m)
7
GH Series Bus AC Servo Drive Unit User Manual
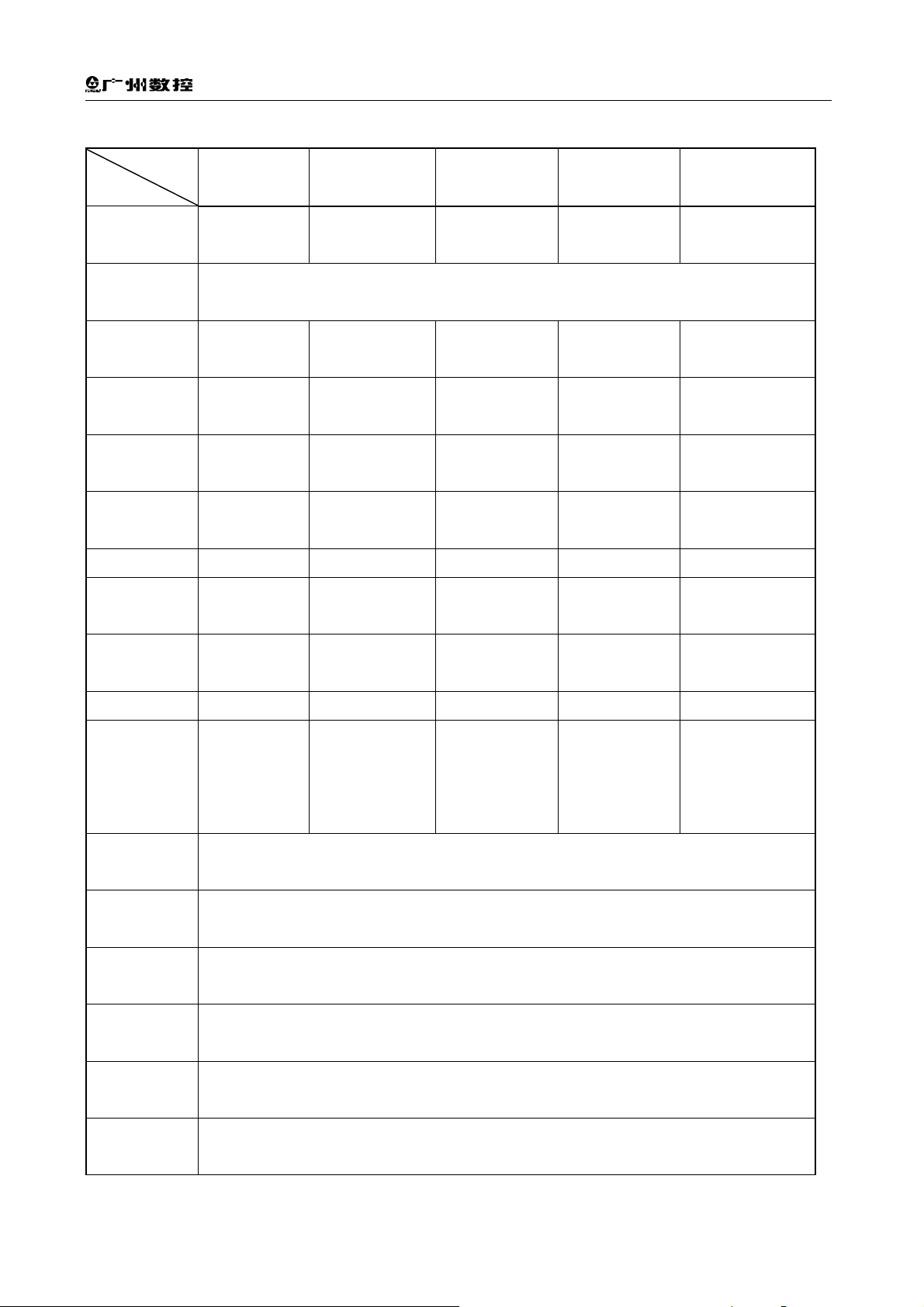
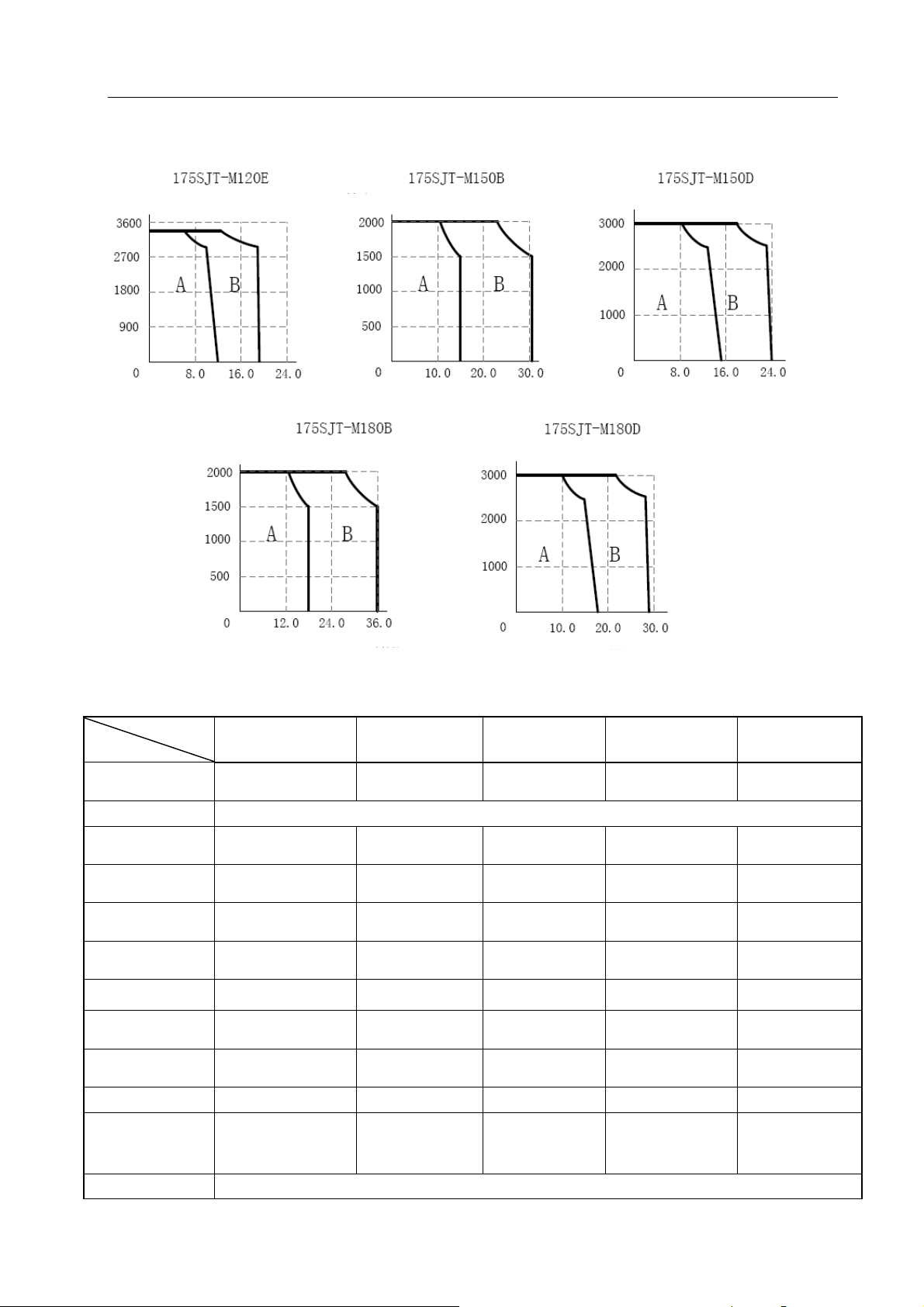
Table 1-5 The main technical parameter of the 175SJT series motor
Type
Item
175SJT-M120E 175SJT-M150B 175SJT-M150D 175SJT-M180B 175SJT-M180D
Rated power
3 2.4 3.1 2.8 3.8
(kW)
Polar
3
logarithm
Rated
13 11 14 15 16.5
current (A)
Zero torque
12 15 15 18 18
(N.m)
Rated torque
9.6 15 12 18 14.5
(N.m)
The Max.
19.2 30 24 36 29
torque (N.m)
Rated speed 3000 1500 2500 1500 2500
The Max.
2000 3000 2000 3000
speed
3300
Inertia of
5.1×10-3 5.1×10-3 5.1×10-3 6.5×10-3 6.5×10-3
moment
Weight (kg) 18.9 18.5 19 22.8 22.9
The motor
weight with
24.5 24.1 24.6 28.4 28.5
power-down
brake (kg)
Insulation
B(GB 755-2008)
level
Vibration
R(GB 10068-2008)
level
Defense
IP65(GB/T4942.1-2006)
level
Installation
IMB5(Flange installation)(GB/T 997-2008 / IEC 60034-7:2001)
type
Working
S1(Consecutive working system)(GB 755-2008)
system
Adapted
encoder
Increment 2500 p/r, 5000 p/r etc., absolute encoder 17 bit single circle or multiple
circles
8
Chapter One Brief
)
The torque-speed character figure (T – M) of the servo motor is shown below:
A: Continuous working area B: Short time working area
Speed (r/min)
Torque (N.m)
Speed (r/min)
Speed (r/min
Torque (N.m)
Torque (N.m)
Speed (r/min)
Speed (r/min)
Torque (N.m)
Torque (N.m)
Table 1-6 The main technical parameter of the 175SJT series motor (to be continued the table 1-5)
Type
175SJT-M220B 175SJT-M220D 175SJT-M300B 175SJT-M300D 175SJT-M380B
Item
Rated power
(kW)
Polar logarithm
Rated current
(A)
Zero speed
torque (N.m)
Rated torque
(N.m)
The Max. torque
(N.m)
Rated speed
The Max.
speed
Inertia of
moment
3.5
17.5
22
22
44
1500
2000
9.0×10-3
4.5 3.8 6 6
3
19 19 27.5 29
22 30 30 38
17.6 24 24 38
35.2 48 48 76
2500 1500 2500 1500
3000 2000 3000 1800
9.0×10-3 11.2×10-3 11.2×10-3
14.8×10-3
Weight (kg) 28.9 29.2 34.3 34.4 42.4
The motor weight
with power-down
34.5 36.8 42 42.1 50.1
brake (kg)
Insulation level
B(GB 755-2008)
9
GH Series Bus AC Servo Drive Unit User Manual
)
Vibration level
Defense level
Installation type
Working
R(GB 10068-2008)
IP65(GB/T4942.1-2006)
IMB5(Flange installation)(GB/T 997-2008 / IEC 60034-7:2001)
S1(Consecutive working system)(GB 755-2008)
system
Adapted
Increment 2500p/r, 5000p/r etc., absolute encoder 17 bit single circle or multiple circles
encoder
The torque-speed character figure (T – M) of the servo motor is shown below:
A: Continuous working area B: Short time working area
Speed (r/min)
Torque (N.m)
Speed (r/min
Torque (N.m)
Speed (r/min)
Torque (N.m)
Speed (r/min)
Torque (N.m)
Speed (r/min)
Torque (N.m)
10
Chapter Two Installation
p
2 INSTALLATION
Notice
The storage and installation of the product should be suitable for the ambient
conditions.
The pile number of the product should be controlled, which can not be piled
them together too many, so that the product may be crushed or dropped.
The storage and transportation of the product should be used the original
packing.
Do not use the product with damaged or absent components.
Do not install it on the flammable surface or near, to avoid the fire hazard.
The servo drive unit should be installed inside the electric cabinet; prevent
the dust, corrosive gas, conductive material, liquid and the inflammable
matter from entering the machine.
The servo drive unit and servo motor can not be shocked and im
acted.
2.1 Ambinet Condition
Item GH2000/GH3000 series servo drive unit SJT series AC servo motor
Using
temperature/
humidity
Storage
temperature/
humidity
Atmosphere
ambient
Altitude Blow 1000m Below 1000m
Vibration
Defense level IP43 IP65
Below 90%RH (No condensation)
-40℃ ~ +70℃, 90%RH (No
condensation)
There is no corrosive gas, inflammable
gas, oil mist or dust inside the control
cabinet.
Less than 0.5G (4.9m/s
0℃~+40℃(No freeze)
2
) 10Hz~60Hz (Nonconsecutive)
0℃~+40℃ (No freeze)
Below 90%RH(No condensation)
Below -40℃ ~ +70℃, 90%RH (No
condensation)
There is no corrosive gas,
inflammable gas, oil mist or dust in the
house (without sunshine).
11
GH Series Bus AC Servo Drive Unit User Manual
2.2 The Installation of the Drive Unit
2.2.1 Installation Ambient
Defense
The servo drive unit should be installed well-mounted electric cabinet, because its structure is
without defense. Prevent the corrosive gas, inflammable gas, as well as the conductive material, metal
dust, oil mist and liquid from entering the machine.
Temperature, humidity
The ambient temperature is 0℃~+40℃, and ensure the radiating condition.
Vibration and impact
The installation of the drive unit can not be shocked, and the vibration control should be less than
0.5G (4.9m/s
from the heavy load and impact.
2
) based upon the buffering measure. The installation of the drive unit must be far away
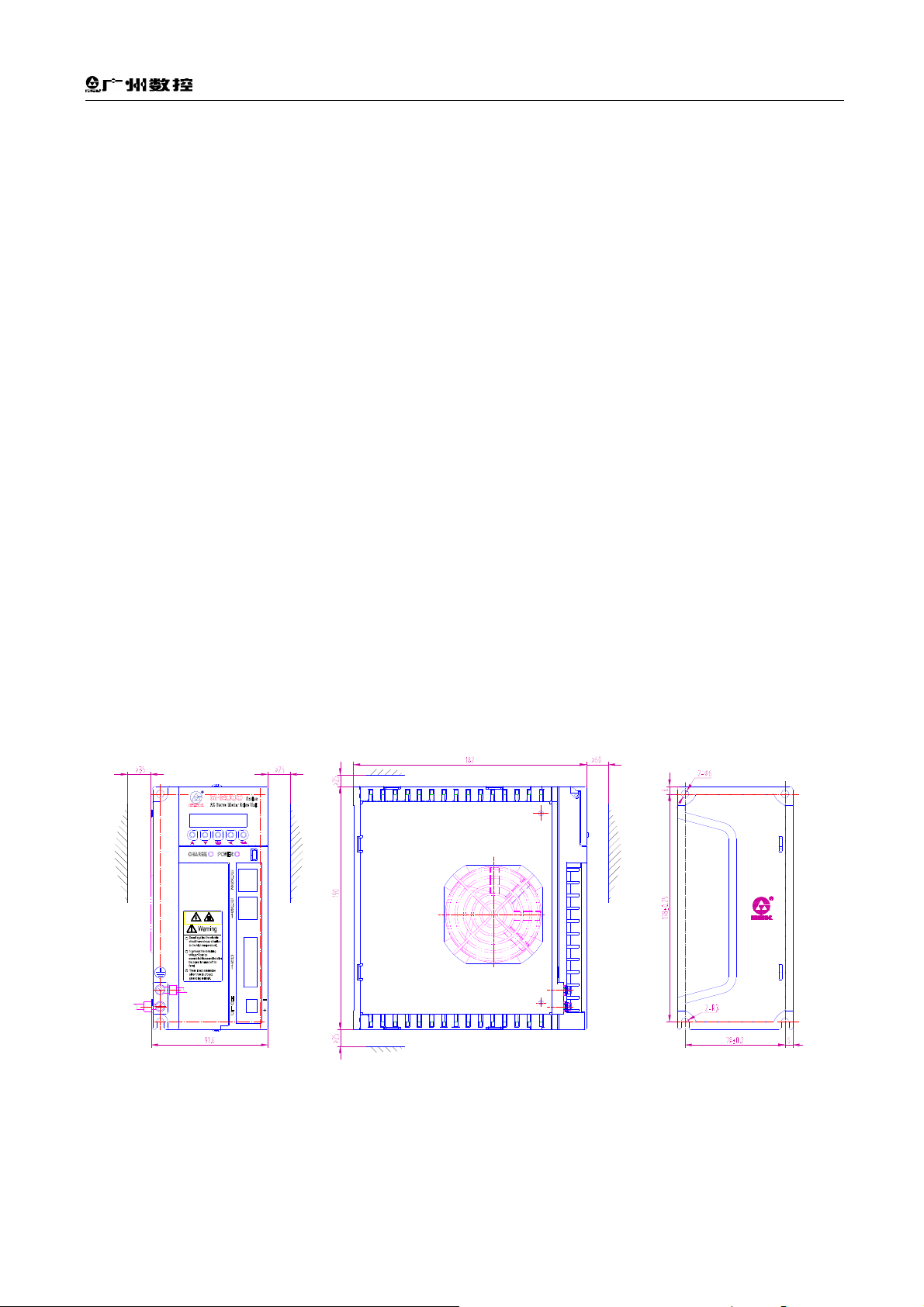
2.2.2 Installation Dimension
The GH2000/GH3000 series drive unit adopts base plate installation method, of which its
installation direction is vertical to the installation surface and upward. The front is forward and the top
surface is upward for cooling when the drive unit is installed. Note that the necessary space around the
machine should be reserved.
In order to guarantee the ambient temperature of the drive unit does not rise consecutively, the
convection air should blow to the radiator of the drive unit inside the electric cabinet.
Fig. 2-1 GH2030T installation dimension (Unit: mm)
12
 Loading...
Loading...