

Page 1
Page 2
This user manual describes all items concerning the operation of this CNC
system in detail. However, it is impossible to give particular descriptions for all
unnecessary or unallowable operations due to length limitation and product application
conditions;Therefore, the items not presented herein should be considered impractical
or unallowable.
Copyright is reserved to GSK CNC Equipment Co., Ltd. It is illegal for any
organization or individual to publish or reprint this manual. GSK CNC Equipment Co., Ltd.
reserves the right to ascertain their legal liability.
Page 3

User Manual for DAH01 and DAH2075E AC Servo Drive Unit
Dear users,
We are honored by your purchase of all-digital AC servo drive units with high speed
and high precision of DAH series of GSK CNC Equipment Co., Ltd.
This manual comprehensively introduces the installation, connection, debugging,
operation and maintenance of the all-digital AC servo drive unit of DAH Series (including
DAH01 and DAH2075E) for your easy understanding as well as flexible and efficient
application. It provides related knowledge and safety items for the application of the drive
unit. Please read the safety notes carefully before using the product.
In order to give full play to the function of the all-digital AC servo drive unit with high
precision and high speed of DAH series and ensure your safety, please read the manual
carefully before using the product and operate the drive unit correctly in strict accordance
with the safety notes and operation methods in the manual.
z Improvement, specification and version for the product are subject to change without
Preface
notice.
If the user modifies the product, our company doest not assume any responsibility,
z
meanwhile, the warranty certificate is no longer available.
This user manual shall be kept by end user.
Sincere appreciation—— Thank you for your kind support when you are using the
products of Guangzhou CNC Equipment Co., Ltd.
II
Page 4
Preface
To avoid operator and other personal injury and machine damage, please pay
special attention to the following warning labels while reading the manual.
The signs below indicate the danger levels during operation. The content of
them is extremely important and must be observed.
Warning
Danger
Incorrect operation will cause damage or death.
Incorrect operation will cause medium or slight injury, even
property loss.
Caution
Note
The following signs indicate what must be done and what must not be done.
If this label is not noticed, unexpected results and situation will occur.
Remind user of important requirements and instructions during the operation.
It indicates prohibition (must not be done)
!
It indicates enforcement (must be done)
III
Page 5
DAH01, DAH2075E AC Servo Drive Unit User Manual
Danger
!
Please tighten each terminal of the main
circuit with appropriate force.
If the user does not obey the
! !
instruction, it will cause
connection loosing, wire spark
and even a fire.
Please make sure the power is off before
wiring.
If the user does not obey the
! !
instruction, it will cause
electric shock.
Wiring and overhaul must be done by
electric engineering professionals.
If the user does not obey the
! !
instruction, it will cause
electric shock or a fire.
Please mount the drive unit on
nonflammable subject, and keep it far
away from inflammable materials.
If the user does not obey the
instruction, it will cause a fire.
Install a breaker, interference filter and
AC reactor.
If the user does not obey the
instruction, it will cause
lightning, fault or damage.
Operations of moving, wiring, checking
and maintenance can be done 5 minutes
after power off.
If the user does not obey the
instruction, it will cause
electric shock.
The ground terminal PE of the servo
unit must be earthed.
If the user does not obey the
! !
instruction, it will cause
electric shock.
IV
Install an emergency switch.
If the user does Not obey the
instruction, it will cause Injury,
fault and equipment damage. .
Page 6
Preface
!
Danger
Ensure the wiring is correct.
If the user does not obey the
! !
instruction, it will cause
equipment damage and electric
shock.
Please do not open the cover of the
terminal board in the state of Power On or
running.
If the user does not obey the
instruction, it will cause
electric shock.
Please do not touch the switch with
wet hand.
Please tight the power terminal and motor
output terminal.
If the user does not obey the
instruction, it will cause a fire.
Please do not directly touch the
connection terminal of the main
circuit of the drive unit.
the user does not obey
If
the instruction, it will cause
electric shock.
Please do n ot put hands into the servo
unit.
If the user does not obey the
instruction, it w ill cause
electric shock.
If the user does not obey the
instruction, it w ill cause
electric shock.
V
Page 7

DAH01, DAH2075E AC Servo Drive Unit User Manual
!
Caution
The wiring between the drive unit and
motor should be performed strictly in term
of the wiring diagram.
If the user does not obey the
! !
Load operation can be done after
successful no-load trial operation.
! !
instruction, it will cause
equipment damage.
If the user does not obey the
instruction, it will cause
equipment damage.
Please connect the brake resistance
according to the wiring diagram.
The voltage level loaded on each terminal
must use the one specified in the user
manual.
If the user does not obey the
instruction, it will cause
equipment damage.
Eliminate the fault before operation when
an alarm occurs.
If the user does not obey the
instruction, it will cause
equipment damage.
Match the motor with a proper servo
unit.
If the user does not obey the
! !
Please do not change, dismantle or repair
the drive unit.
instruction, it will cause
equipment damage.
If the user does not obey the
instruction, it will cause
equipment damage.
VI
If the user does not obey the
instruction, it will cause
equipment damage.
Do not hold the cable and motor shaft
during motor transportation.
If the user does not obey the
instruction, it will cause
equipment damage.
Page 8

Preface
Please do not touch the motor and radiator
of the servo unit which may be in high
temperature during operation.
If the user does not obey the
instruction, you will be burnt.
Do not connect power input wires R, S, T to
motor output terminals U, V, W.
If the user does not obey the
instruction, it will cause
equipment damage.
!
Caution
The parameters cannot be altered and
changed extremely.
If the user does not obey the
instruction, it will cause
equipment damage.
If the elements of the spindle drive unit are
incomplete or damaged, do not operate the
drive unit. Please contact the seller
immediately.
If the user does not obey the
instruction, it will cause
equipment damage.
The internal electronic devices of an
abandoned drive unit are not reusable and
taken as industrial waste.
If the user does not obey the
instruction, it will cause accident.
Please do not turn on/off the power
frequently.
If the user does not obey the
instruction, it will cause
equipment damage.
VII
Page 9

DAH01, DAH2075E AC Servo Drive Unit User Manual
Safety Responsibility
Manufacturer Responsibility
——Be responsible for the danger which has been eliminated and/or controlled on
design and configuration of the provided servo unit and accessories.
——Be responsible for the safety of the provided servo unit and accessories.
——Be responsible for the provided information and advice for the users.
User Responsibility
——Be trained with the safety operation of the servo unit and familiar with the safety
operation procedures.
——Be responsible for the dangers caused by adding, changing or altering the original
servo unit and the accessories.
——Be responsible for the danger without following the operations, maintenances,
installations and storages described in the manual.
VIII
Page 10

Contents
Contents
CHAPTER 1 OVERVIEW ··························································································1
1.1 Product Introduction ·························································································1
1.2 Confirmation of the Arrived Goods ···································································4
1.3 Product Appearance·························································································8
CHAPTER 2 INSTALLATION···················································································10
2.1 Ambient Conditions ························································································10
2.2 Installation for Servo Drive Unit······································································10
2.3 Installation for Servo Motor ············································································15
CHAPTER 3 CONNECTION····················································································16
3.1 Standard Wiring······························································································16
3.2 Terminal Function···························································································21
3.3 GSK-LINK Bus Communication Principle·······················································30
3.4 I/O Interface Principle·····················································································30
CHAPTER 4 PARAMETER······················································································35
4.1 Parameter List································································································35
4.2 Specification for Parameter Meaning ·····························································38
4.3 Comparison Table of Type Code Parameters and Spindle Motors ·················48
CHAPTER 5 ALARM AND TROUBLSHOOTING·····················································50
5.1 Alarm List ·······································································································50
5.2 Alarm Troubleshooting····················································································51
CHAPTER 6 DISPLAY AND OPERATION·······························································58
6.1 Keyboard Operation ·······················································································58
6.2 Monitoring Mode·····························································································59
6.3 Parameter Setting ··························································································61
6.4 Parameter Management·················································································61
6.5 Speed Trial Run······························································································63
6.6 JOG Operation ·······························································································64
6.7 Motor Test·······································································································64
6.8 User Shortcut Password·················································································64
6.9 Servo Parameter Auto Setting ········································································65
6.10 Others ··········································································································65
CHAPTER 7 RUN····································································································66
7.1 Power Supply Connection ··············································································66
7.2 Trial Run·········································································································68
7.3 Adjustment ·····································································································70
CHAPTER 8 PRODUCT SPECIFICATION······························································72
8.1 Specifications of Drive Unit·············································································72
IX
Page 11

DAH01, DAH2075E AC Servo Drive Unit User Manual
8.2 Servo Motor Specification·············································································· 74
8.3 Isolation Transformer····················································································· 78
Chapter 9 ORDER INSTRUCTION ········································································· 82
9.1 Capacity Selection························································································· 82
9.2 Electronic gear ratio······················································································· 84
9.3 Stop characteristcs ························································································ 85
9.4 Calculation methods of servo drive unit and position controller selection······ 85
X
Page 12

Chapter 1 Overview
CHAPTER 1 OVERVIEW
1.1 Product Introduction
The AC servo drive unit (all digital AC drive unit with high precision and high speed) of DAH
series (including DAH01 and DAH2075E) is a new generation of high-precision and high-speed AC
servo product produced by our company. It can be used together with various open-loop and
closed-loop control systems. The servo unit uses an international advanced special chip for motor
control (TMS320F2812PGFA DSP), a large scale programmable gate array(CPLD/FPGA)and an
IPM intelligent power module. It is of high integrated level, small dimension, safe protection and
high reliability. Its performance has reached the advanced level of similar foreign products, for an
optimal PID algorithm is used to complete PWM control; besides, it can intelligently identify various
servo motor models and has parameter auto setting function. Its servo motor uses a 17 bits
high-precision absolute encoder. The servo drive unit of the series can be applied to mechanical
manufacture, CNC machines, printing and packing machines, textile machines, robots, automatic
manufacturing lines and other automation fields.
DAH series AC servo unit has the following advantages:
z Using the most advanced 32-bit DSP processor (F2812) of TI Company to shorten signal
processing time and improve current sampling precision. System processing capability has been
greatly improved due to the 150MIPS of frequency of F2812.
z The system uses a 17-bit absolute encoder with 131072 lines. Compared with incremental
encoders, absolute encoders are characterized by high positioning precision, strong
anti-interference ability, motor rotor position memory and convenient installation.
z Bus communication uses GSK-LINK communication mode, which can fully meet the control
requirement of more than five axes. Up to 254 servo drive units can be connected theoretically,
and data transmission rate is 100Mbit/s;
z Fully closed loop control between CNC and servo unit, on-line upload and download of servo
parameters, diagnostic message feedback of the servo and servo alarm monitoring can be
realized in bus communication mode; memorizing workpiece coordinate system after power-off
and returning to zero point without a stroke limit switch are realized too;
z Analog instruction interface uses a high–precision A/D (16 bits) convertor. It has strong
anti-interference ability and small zero drift.
z High speed and high precision: a servo unit can drive a servo motor of 6000r/min; speed ratio: 1:
60000; it has stable torque characteristics from low speed to high speed; rotary positioning
precision: 0.0762μm;
z Intelligent identification for motor models and auto-setting control for parameters: DAH series AC
servo unit intelligently reads various models and parameters into the servo unit when power is
turned on. When a motor is replaced with the one of different model, its corresponding default
parameter can be resumed automatically; in different load inertia ratios, it can accurately identify
system control models and has parameter auto-setting function.
Simple and flexible control: set the operation mode and operation characteristics of the servo
z
drive unit by modifying parameters to meet different requirements.
1
Page 13
DAH01, DAH2075E AC Servo Drive Unit User Manual
1.1.1 Technical Specification of DAH Series Servo Drive Unit
Adaptive motor capacity
Input
Main circuit
power
supply
Control circuit
Control mode
Feedback mode 17-bit absolute encoder
conditions
Ambient
Temperature
Relative humidity
Vibration/impact
resistance
Speed control range
(based on no locked rotor
occurs at rated load)
Speed control mode
Speed variation rate
Speed frequency
response
Time of acceleration/
deceleration
External speed command
input
0.1kW~6kW
Single-phase or three-phrase AC (0.85~1.1)×220V
50Hz/60Hz
Single phase AC (0.85~1.1)×220V 50Hz/60Hz
Three-phase full wave rectification, IGBT PWM sine wave
drive
Working temperature: 0℃~+40℃
Storage temperature: -40℃~+70℃
< 90% (no dewing free from condensation)
<0.5G(4.9m/s
2
)/10Hz~60Hz(non-continuous operation)
1: 60000
0~100% load: ±0.01﹪
Rated voltage±10%:±0.01﹪
≥200Hz
0~10s
±10V input voltage
Internal speed setting Internal setting for four kinds of speed
Input impedance 20kΩ
Max. pulse input
frequency
Position control mode
0~6.5536M(Hz)
1 direction + pulse; 2 CCW+CW pulse train; 3 90° phase
Input pulse type
difference two-phase pulse; one of the three categories may
be selected. Any one of the three types may be selected.
Input pulse form 1 differential input 2 open collector input
Electronic gear ratio 1< α/β <32767
Position signal output
1 phases A, B, Z differential output; 2 phase Z open collector
output
1. Servo enable; 2. Alarm clearing; 3. CCW drive prohibition;
I/O signal
Control input signal
4. CW drive disabling; 5. Deviation counter zeroing//speed
selection1; 6. Command pulse prohibition/speed selection 2;
7. Zero-speed clamping.
Control output signal
1. Servo Ready Output; 2. Servo alarm output 3. Positioning
completion output/speed arrival output; 4. Brake output
2
Page 14
Chapter 1 Overview
Internal
Communication function
High performance
function
Function
GSK-LINK communication mode; max. number of
connections: 254 axes; data transmission rate: 100Mbit/s
1. A high-definition encoder is used to realize stable machine
operation;
2. A 16-bit high precision A/D conversion chip is adopted to
realize high-precision closed loop control, feedback pulse
number can be adjusted freely(≤32768);
3. Motor model automatic identification;
4. On-line upload and download of servo parameters,
diagnostic information feedback of the servo and servo alarm
monitoring are realized in bus communication mode;
5. Power failure memory for workpiece coordinate system
and zero return without stroke limit switch are realized in bus
communication mode;
6. Control model identification and parameter auto setting
functions.
Regenerative braking Built-in
Frequency dividing output
of encoder signals
Overspeed, main power overvoltage,power module fault,
undervoltage, overcurrent, overload, overheat, brake
Protection function
Monitoring function
Display and operation 6-bit LED digital tube, 4 buttons
abnormality, encoder abnormality, encoder communication
failure, invalid motor model setting, control power
abnormality, position deviation, etc.
Motor speed, current position pulse number, position
command pulse number, position deviation, motor torque,
motor current, straight-line speed, rotor absolute position,
command pulse frequency, running state, input/output
terminal signal, currently given voltage, etc.
Pulse output: 16~32768 (pulse/revolution)
adjustable dividing frequency
3
Page 15

DAH01, DAH2075E AC Servo Drive Unit User Manual
1.2 Confirmation of the Arrived Goods
1) Please check the received goods in accordance with the following items:
(1) Check whether the packing box is in good condition and the products are damaged in delivery.
(2) Confirm whether the products are the ordered ones according to the nameplates of the servo
drive units and servo motors.
(3) Confirm whether the accessories in the packing box are complete in terms of the packing list.
Note
2) Instruction for Motor Model
DAH series AC servo drive units can be matched with a variety of servo motors with TAMAGAWA
absolute encoders at home and abroad. Users can choose one of these motors in their orders.
Information about GSK SJT series servo motors with absolute encoders is provided in chapter eight
in the manual, while relative information about servo motors of other models is provided together with
the servo motors.
A damaged or incomplete AC servo unit can not be installed.
An AC servo unit should be used together with its adaptive servo motor.
Any questions, please feel free to contact suppliers or our company.
4
Page 16
Chapter 1 Overview
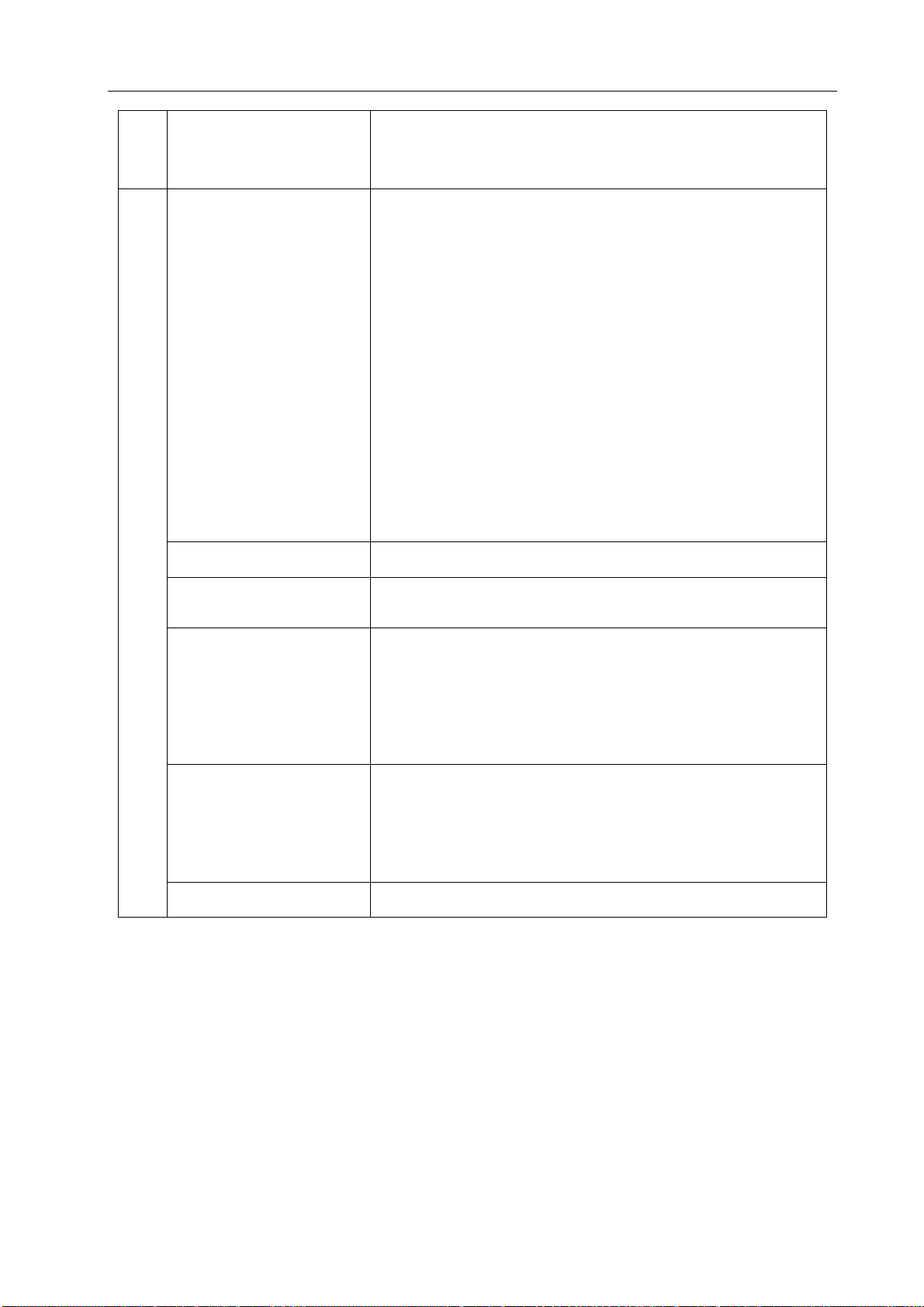
3) Mechanical Characteristics of Servo Motor
Speed (r/min)
nMAX
nN
Continuous
working area
0
T
———— rated torque ; T
N
———— rated speed ; n
n
N
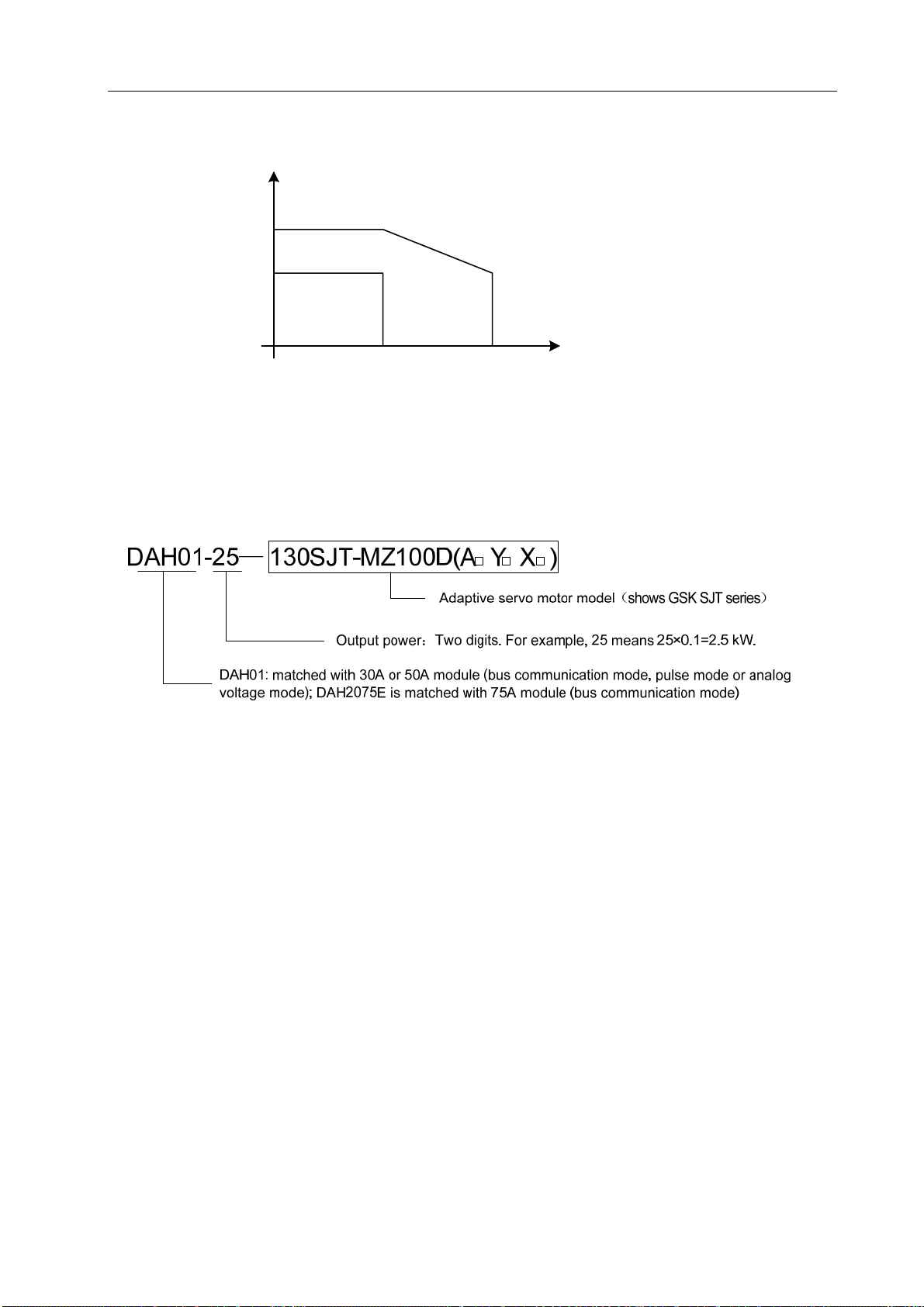
4) Order Model Instruction
1※ :Gsk servo motors with absolute encoders can be matched optionally by placing an order. The default
parameters of AC servo drive units only match the servo motors of SJT series. When other servo
motors are used, the ex-factory parameter has been backuped in EEPROM area and can be
recovered. When restoring the factory parameters, execute Backup Restoration instead of Default
Parameter Restoration.
2※ :Medium and small power (≤1.5KW) is standard configuration, medium power (>1.5W, ≤ 6KW)
uses thickened radiator.
Acceleration/
deceleration
area
TN TMAX
MAX
MAX
Torque(N.m)
———— maximum torque ;
———— maximum speed.
5
Page 17

DAH01, DAH2075E AC Servo Drive Unit User Manual
Order models of servo drive units matching SJT series servo motors with absolute
encoders are as follows:
Order model
(Only match the servo motors of GSK
Servo motor model and specification Remark
SJT series)
DAH01-05-80SJT-M024C(A4) 0.5kW, 2.4N.m, 2000 r/min, 3A, (30A module)
DAH01-07-80SJT-M024E(A4) 0.75kW, 2.4N.m, 3000 r/min, 4.8A, (30A module)
DAH01-06-80SJT-M032C(A4) 0.66kW, 3.2N.m ,2000 r/min, 5A, (30A module)
DAH01-10-80SJT-M032E(A4) 1.0kW,3.2N.m, 3000 r/min, 6.2A, (30A module)
DAH01-10-110SJT-M040D(A4) 1.0kW, 4N.m, 2500 r/min, 4.5A, (30A module)
DAH01-15-110SJT-M060D(A4) 1.5 kW 6N.m, 2500 r/min, 7A, (30A module) ※
DAH01-10-130SJT-M040D(A4) 1.0 kW 4N.m, 2500 r/min, 4A, (30A module)
DAH01-13-130SJT-M050D(A4) 1.3 kW 5N.m, 2500 r/min, 5A, (30A module)
DAH01-15-130SJT-M060D(A4) 1.5 kW, 6N.m, 2500 r/min , 6A, (30A module)
DAH01-20-130SJT-M075D(A4) 1.88 kW, 7.5N.m, 2500 r/min, 7.5A, (30A module) ※
DAH01-15-130SJT-M100B(A4) 1.5 kW, 10N.m 1500 r/min, 6A, (30A module)
DAH01-25-130SJT-M100D(A4) 2.5 kW, 10N.m, 2500 r/min, 10A, (50A module) ※
DAH01-23-130SJT-M150B(A4) 2.3 kW, 15N.m, 1500 r/min, 8.5A, (30A module) ※
DAH01-39-130SJT-M150D(A4) 3.9 kW, 15N.m, 2500 r/min, 14.5A, (50A module) ※
DAH01-28-175SJT-M180B(A4) 2.8 kW, 18N.m, 1500 r/min, 15A, (50A module) ※
DAH01-38-175SJT-M180D(A4)
3.8 kW, 18N.m, 2500 r/min, 16.5A, (75A module) ※※
DAH2075E-38-175SJT-M180D(A4)
DAH01-35-175SJT-M220B(A4)
3.5 kW, 22N.m,1500 r/min, 17.5 A, (50A module) ※※
DAH2075E-35-175SJT-M220B(A4)
DAH01-45-175SJT-M220D(A4)
4.5 kW, 22N.m,2500 r/min, 19 A, (75A module) ※※
DAH2075E -45-175SJT-M220D(A4)
DAH01-38-175SJT-M300B(A4)
3.8 kW, 30N.m,1500 r/min, 19 A, (75A module) ※※
DAH2075E -38-175SJT-M300B(A4)
DAH01-60-175SJT-M300D(A4)
6 kW, 30N.m,2500 r/min, 27.5 A, (75A module) ※※
DAH2075E -60-175SJT-M300D(A4)
6
Page 18
Chapter 1 Overview
5) Accessories
Standard accessories
Order model
Driving device
(drive units and
motors)
Driving devices
matching CNC
(drive unit,
motor and
CNC)
DAH2075E,DAH01
(bus communication interface
mode)
(1) An instruction manual (this
one) for DAH series AC servo
drive unit.
(2) RJ45S crystal head and
network cable
(3) 3m motor wire, 3m encoder
feedback wire
(1) An instruction manual (this
one) for DAH series AC servo
drive unit.
(2) RJ45S crystal head and
network cable.
(3) 3m motor wire, 3m encoder
feedback wire
(Pulse/analog command
(1) An instruction manua (this
one) for DAH series AC
servo drive unit.
(2) One set of DB44 female
plugs.
(3) 3m motor wire, 3m encoder
feedback wire.
(1) An instruction manual (this
one) for DAH series AC
servo drive unit.
(2) 3m motor wire, 3m encoder
feedback wire.
(3) 3m signal wire from CNC to
drive unit.
DAH01
interface mode)
Note 1: Signal cable (standard 3m) can be provided when it is matched with our position controller.
Note 2: Users can select feedback cables (standard 3m) when our servo motors are provided.
Note 3: Standard accessories of servo motors are provided according to servo motor manual.
Remark
The
provided
cables
are
welded.
7
Page 19
DAH01, DAH2075E AC Servo Drive Unit User Manual
交流伺服驱动单
全数字式
系列
ncoder feetback signal
uttons
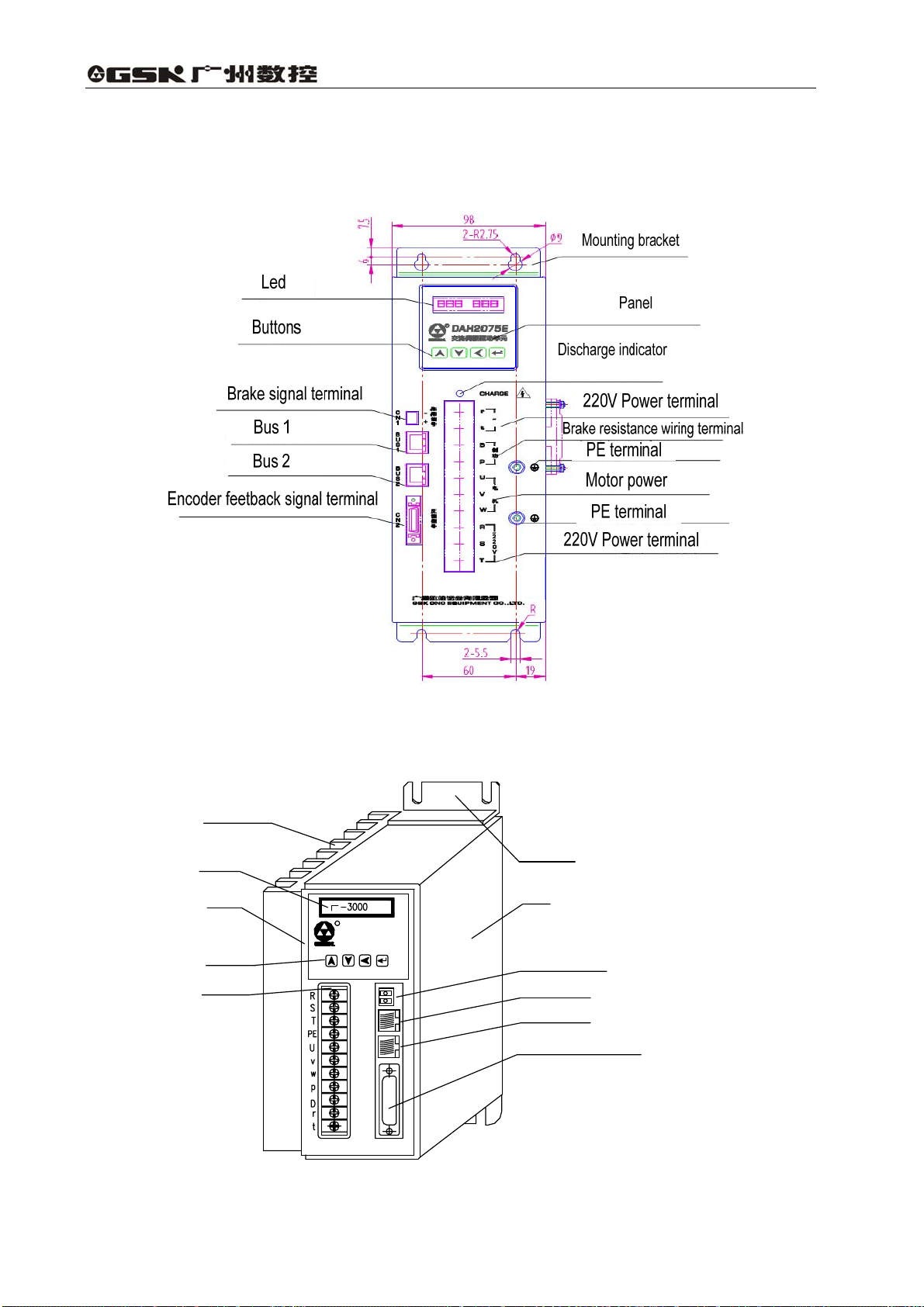
1.3 Product Appearance
1) DAH 2075E Servo Drive Unit
Fig. 1-2-1 DAH2075E (bus communication mode) Servo Drive Unit Appearance
2) Appearance of DAH01 Servo Drive Unit
Radiator
LED
Panel
B
PowerTB
R
D A H 0 1
元
+
CN1 控制信号
bracket
cabinet
Brake terminal
Bus 1
Bus 2
E
CN2 反馈信号
CN2
Fig. 1-3-2 Appearance of DAH01 (bus communication mode) Servo Drive Unit
8
Page 20
Chapter 1 Overview
ottons
ontrol signal
anel
adiator
交流伺服驱动单
全数字式R系列
R
LED
bracket
P
D A H 0 1
B
Power TB
元
cabinet
C
Encoder feetback
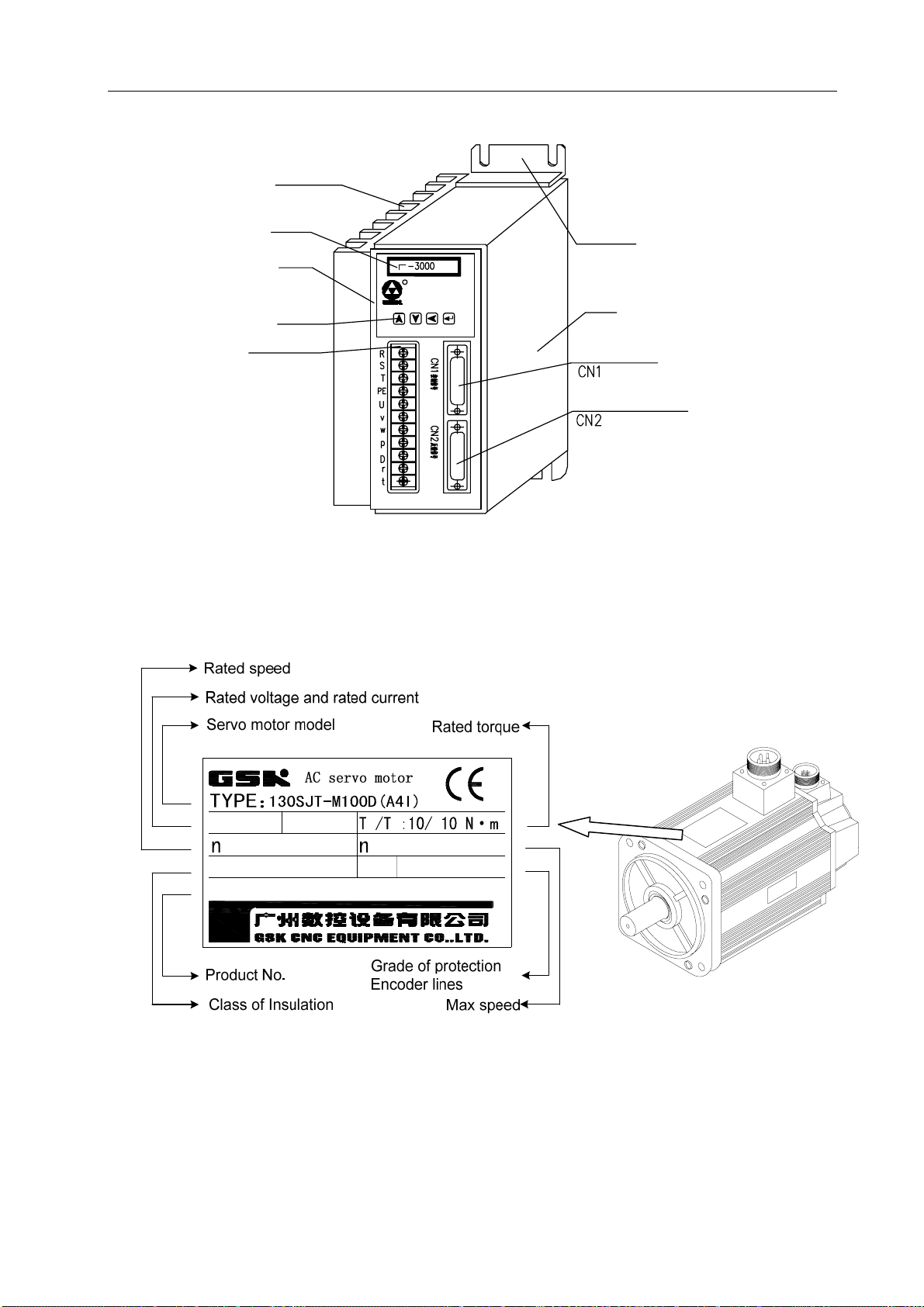
Fig. 1-3-3 Appearance of DAH01 (matched with DB44 female connector) Servo Drive Unit
2) Appearance of Servo Motor
交流伺服电动机
N
U :220V
N
: 2500r/min
S/N:
N
I :10A
081016100D0000107H
NS
max
: 3000 r/min
M: 17 bit
IP65INS.CLASS: B
Fig. 1-3-4 Appearance of Servo Motor
9
Page 21

DAH01, DAH2075E AC Servo Drive Unit User Manual
CHAPTER 2 INSTALLATION
Note
2.1 Ambient Conditions
Item
Operation
temperature/humidity
Storage
temperature/humidity
Atmospheric
environment
Elevation
Vibration
Protection grade IP43 IP65
Servo drive unit of DAH
series
0℃~+40℃ (no frost)
<90%RH (no dewing)
-40℃~+70℃
90%RH(no dewing)
No corrosive air, flammable
air, oil mist and dust in the
control cabinet.
Elevation< 1000m Elevation< 1000m
<0.5G(4.9m/s
2
)10Hz~60Hz (non-continuous running)
2.2 Installation for Servo Drive Unit
Note
AC servo motor of GSK SJT
series
0℃~+40℃ (no frost)
90%RH 以下 (no dewing)
-40℃~+70℃
<90%RH(no dewing)
Indoor environment (no insolation): no
corrosive air, flammable air, oil mist and
dust.
1) Installation environment
(1) Protection
The structure of the servo drive unit has no protection, so it must be installed into an electricity
cabinet with good protection and kept away from corrosive and flammable air, conductive objects,
metal dust, oil mist and liquid.
(2) Temperature and humidity
Environment temperature 0℃~+40 , ℃ ensure good radiating conditions.
10
Page 22
Chapter 2 Installation
A
(3) Vibration and impact
Avoid vibration when installing the drive unit, vibration reducing measures should be taken to
2
keep vibration under 0.5G(4.9m/s
installation.
2) Installation Method
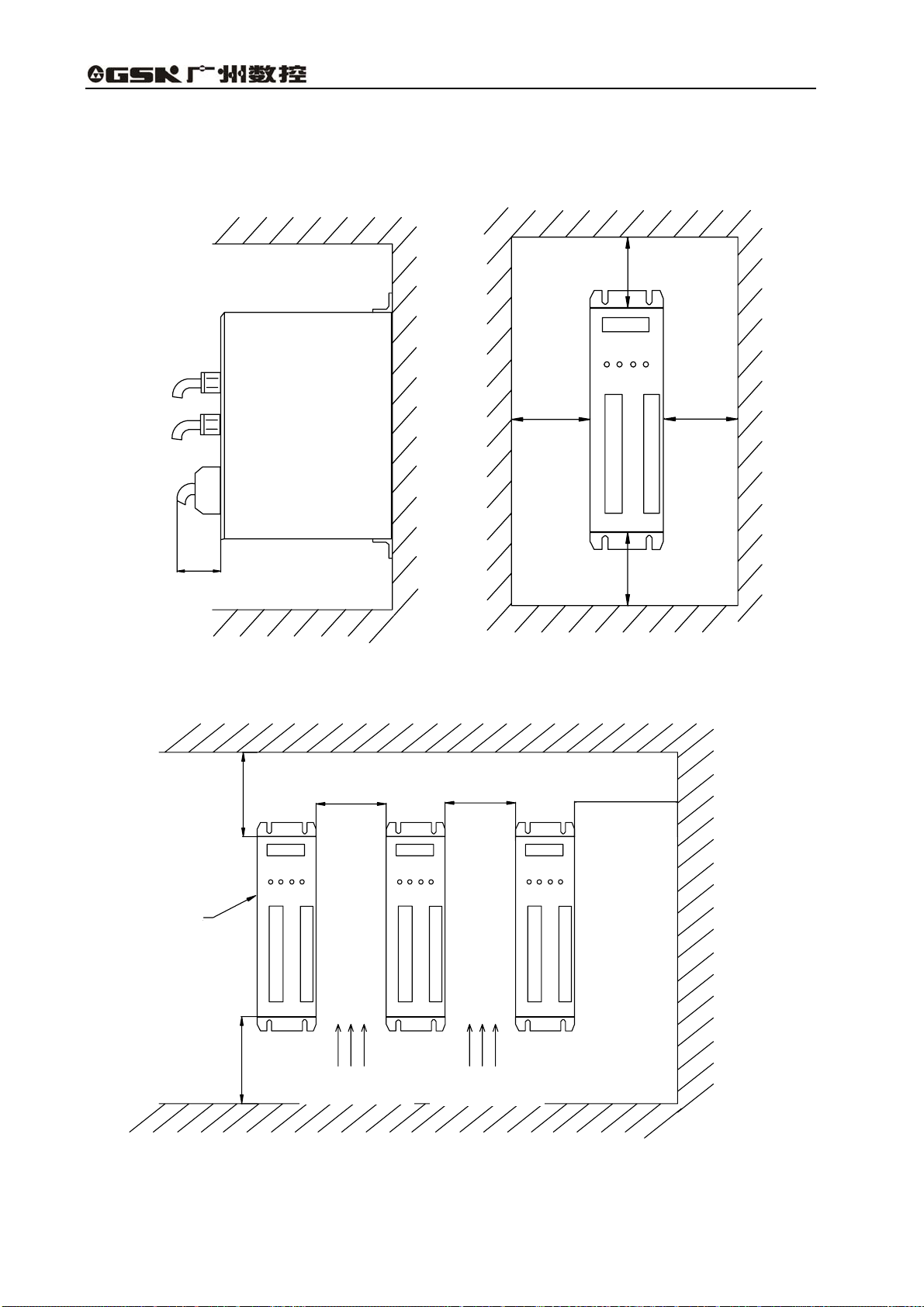
(1) Installation Dimension and Installation Method for DAH01
DAH01 can be installed with base-plate installation or panel installation, with its installation
direction perpendicular to mounting surface. Figure 2-1 is the sketch map for base-plate installation;
Figure 2-2 is the sketch map for panel installation.
) , and drive unit should not bear weight and impact during its
R
DAH01
全数字式
交流伺服驱动单元
抱
闸
总
线
1
总
线
2
Fig. 2-1 Base-plate Installation Mode for Drive Unit
图2-1 驱动单元底板安装方式
pplication of wool felt
Sealing against dust
贴羊毛毡
密封防尘
R
DAH01
全数字式
交流伺服驱动单元
抱
闸
总
线
1
总
线
CN2
反
馈
信
号
2
CN2
反
馈
信
号
User installation
用户安装加工图
processing drawing
Fig. 2-2 Panel Installation Mode for Drive Unit
图2-2 驱动单元面板安装方式
11
Page 23
DAH01, DAH2075E AC Servo Drive Unit User Manual
(2) DAH01 Installation Interval
Figure 2-3 shows installation intervals for a single drive unit, figure 2-4 shows installation
intervals for multiple drive units, large space should be left for keeping good radiating conditions
in the actual installation.
>100mm
>50mm
Fig. 2-3 Installation Intervals for a Single Drive Unit
>100mm
>25mm
>25mm
>100mm
>100mm
>100mm
>100mm
Servo drive unit
伺服驱动单元
Figure 2-4 Installation Intervals for Multiple Drive Units
12
>100mm
Wind direction
通风方向通风方向
Wind direction
Page 24
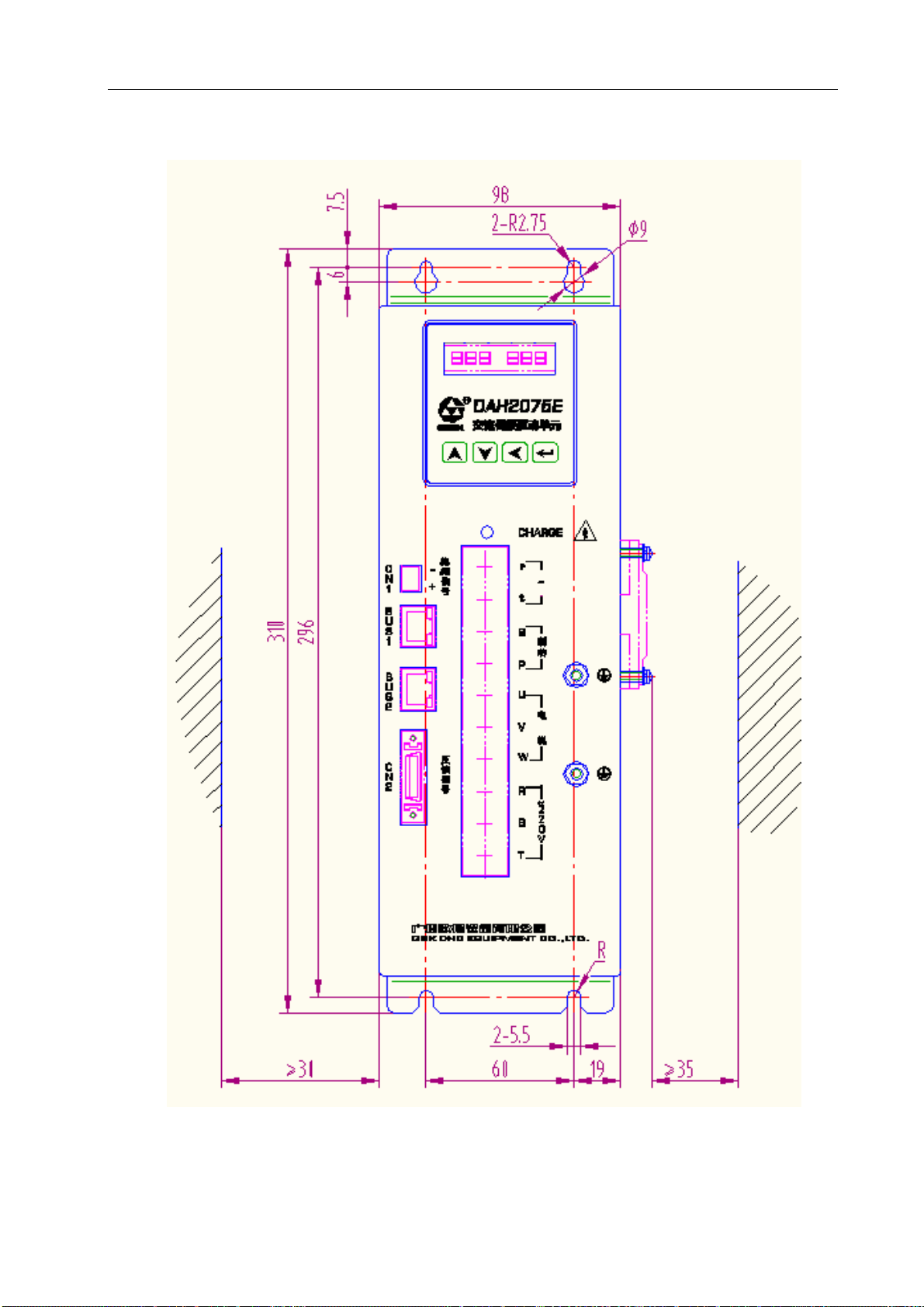
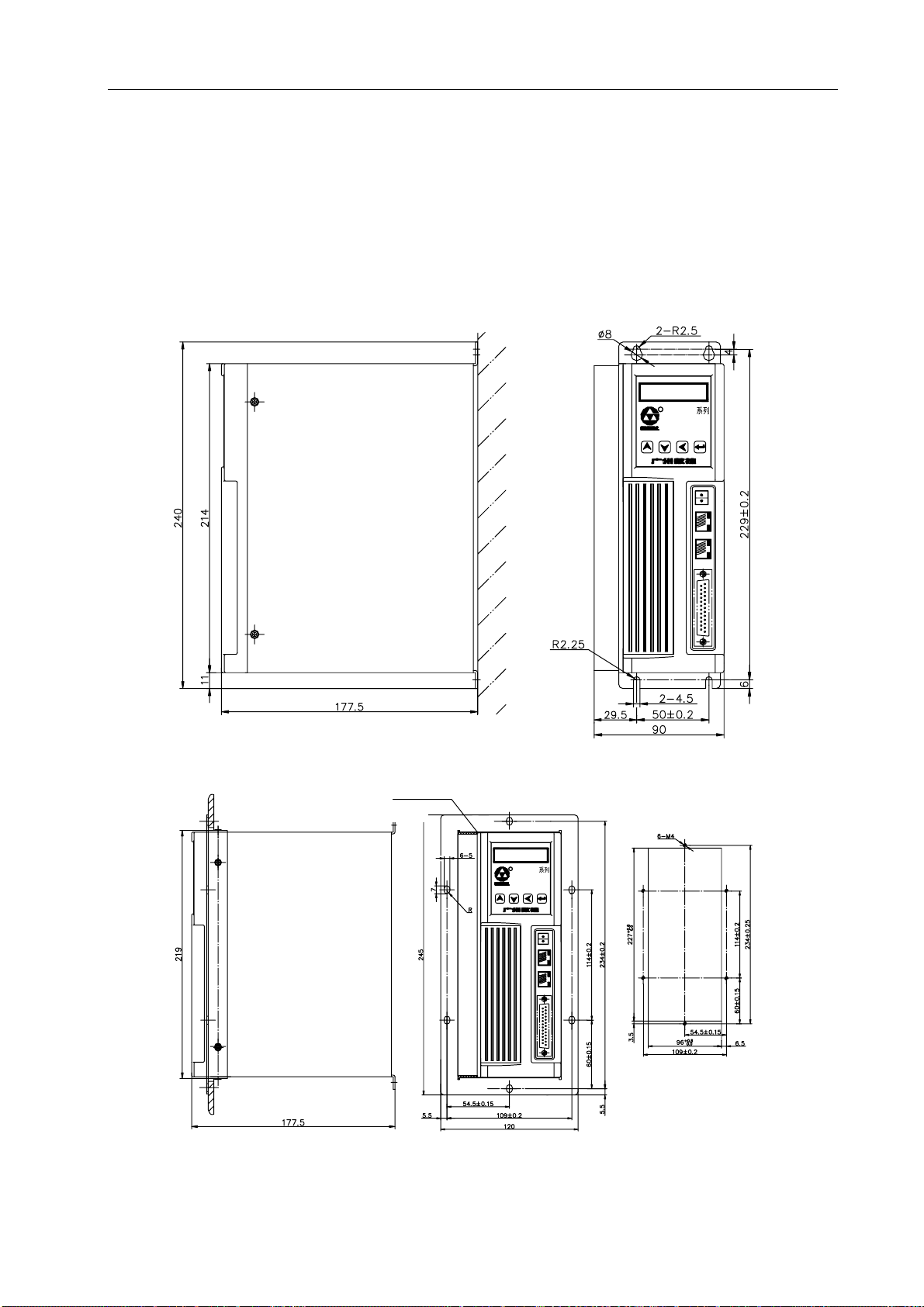
(3) Installation Dimension and Installation Method for DAH2075E
Fig. 2-5 Base-plate Installation Dimension and Intervals (Front) for DAH 2075 Drive Unit
Fig. 2-5 Installation Dimension for DAH 2075 Drive Unit
Chapter 2 Installation
13
Page 25

DAH01, DAH2075E AC Servo Drive Unit User Manual
Fig. 2-6 Base-plate Installation Dimension and Intervals (Side) for DAH 2075 Drive Unit
3) Heat Dissipation
To prevent the ambient temperature of the servo unit from rising continuously, radiators blowing
convection wind towards the unit should be installed in the electric cabinet.
14
Page 26

Chapter 2 Installation
2.3 Installation for Servo Motor
Note
1) Installation Environment
(1) Protection
Prevent liquid from spraying to the motor and prevent oil and water from entering the motor
through its lead-in wire and motor shaft, for the servo motors of GSK SJT series and Huazhong
ST series are not water-proof.
Note: Please declare in your order if you need a water-proof motor.
(2) Temperature and Humidity
Keep the environment temperature between 0~+40 . Motor temperature rise℃ s after
long-term running, so forced air cooling should be taken when there are heating elements or
small space around the motor.
Relative humidity should be less than 90%RH,with no dewing.
(3) Vibration
The servo motor should not be installed in the situation with vibration, and the vibration
should be no more than 0.5G (4.9m/s2)。
2)Installation Method
(1) Installation Method
SJT series motor adopts flange installation mode currently and its installation direction is
arbitrary.
(2) Cautions:
z It is forbidden to strike the motor or motor shaft to prevent the encoder from being
damaged when disassembling or assembling belt wheels.
z Most SJT series motors can not bear big axial and radial loads currently. It is suggested
that elastic couplings be used to connect loads.
z Fix the motor with anti-loosened gaskets to prevent it from coming loose.
15
Page 27
DAH01, DAH2075E AC Servo Drive Unit User Manual
CHAPTER 3 CONNECTION
Caution
!
Only qualified persons can connect the system or check the
connection
Wiring and checking cannot be done in 5 minutes after the power
supply is switched off to avoid electric shock.
Wiring must be performed in terms of the terminal voltage and
polarity to avoid equipment damage and personnel injury.
The drive unit and servo motor must be grounded well.
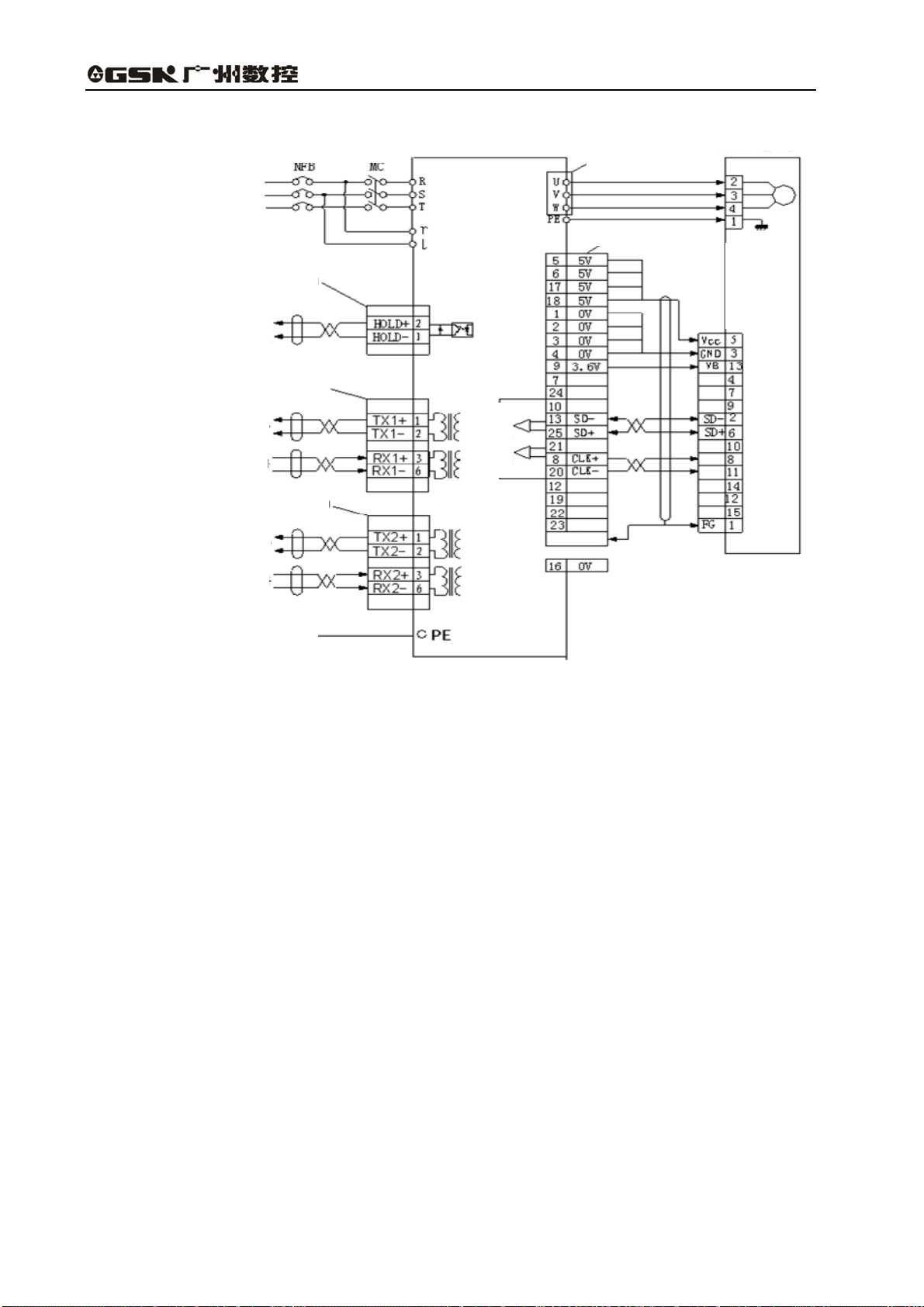
3.1 Standard Wiring
1) Ethernet Bus Mode
Figure 3-1-1 and figure 3-1-2 show the Ethernet bus standard wiring for DAH01 and
DAH2075E respectively.
2) Position Control Mode (Pulse Mode)
Figure 3-1-3 shows the standard wiring for position control (pulse mode).
3) Speed Control Mode (Analog Voltage Mode)
Figure 3-1-4 shows the standard wiring for speed control (analog voltage mode).
4) Wiring
(1) Power Terminal TB
z Wire cross-sectional area: For terminals R、S、T、PE 、 U 、 V and W, cross-sectional
area≥1.5mm2(AWG14~16); for terminals r and t, cross-sectional area ≥1.0 mm2(AWG16~
18).
z Grounding: grounding wires should be as thick as possible. Drive unit shell, servo motor and
system shell are earthed at one point of PE terminal. Earthing resistance <0.1Ω.
z Terminal connection adopts SVM2-4 pre-insulated cold-press terminals which must be
connected securely.
z It is suggested that the power be supplied through a three-phase isolation transformer to
reduce the possibility of electric shock.
z It is suggested that the power supply through connecting a noise filter to improve
anti-interference capability.
z Please install a non-fuse breaker (NFB) to cut off the power in time when a fault occurs in the
drive unit.
Control Signal CN1 and Feedback Signal CN2
z Wire selection: use screen cables (twisted ones are recommended ), Cross-sectional area
≥0.12mm2(AWG24~26),shield layer must be connected to FG terminal.
z Wire length: wires should be as short as possible, the wire for controlling CN1 should not be
longer than 3m, and feedback signal for controlling CN2 should not be longer than 20m.
16
Page 28

Chapter 3 Connection
z Wiring: wiring should be far from power circuit to prevent interference.
z Please install surge absorbing components for inductive components (coil): DC coil
connects to the freewheel diode in parallel back to back while AC coil connects to the RC
absorbing circuit in parallel.
z Bus interface connecting wire uses UTP- five categories (network cable) with both ends
suppressed with crystal heads. Direct network cable and cross network cable can be
suppressed.
Note
Absoulute
encoder
RS485 transceiver
Fig. 3-1-1 Standard Connection for Ethernet Bus Mode of DAH2075E
Note: there must be good electrical connection between drive shell grounding and system shell grounding, or
else unexpected results will occur.
17
Page 29
DAH01, DAH2075E AC Servo Drive Unit User Manual
3-phase or single
phase AC220v
Brake signal terminal(CN1)
Brake release signal
Brake release signal ground
Bus interface(Bus 1)
Bus 1 (sending signal)
Bus 1 (Receiving signal)
Bus interface(Bus 2)
Bus 2 (sending signal)
DAH01 AC servo drive unit
RS485 transceiver
Shell
Motor cable
terminal
Encoder interface 2
Servo motor
Absoulute
encoder
Bus 2 (Receiving signal)
To connect to system shell GND
Fig. 3-1-2 Standard Connection for Ethernet Bus Mode of DAH01
Note: there must be good electrical connection between drive shell grounding and system shell grounding, or
else unexpected results will occur.
18
Page 30
Chapter 3 Connection
3-phase or single
phase AC220v
Servo enable
Alarm chearing
CCW drive prohibition
CW drive prohibition
Position deviation zeroing
Command pulse prohibition
CCW torque limitation
CW torque limitation
Positioning completion
Servo alarm
Servo ready
Output common terminal
Brake release signal
Brake release signal Ground
Encoder Z phase output
Encoder Z phase output GND
DAH01 AC servo drive unit
RS485 transceiver
Shell
Motor cable
terminal
Encoder interface 2
Servo motor
Absoulute
encoder
Pulse feedback A
Position command
Rotation direction command
To connect to system shell GND
Pulse feedback B
Pulse feedback C
Fig. 3-1-3 Standard Connection for Position Control (pulse mode)
Note: there must be good electrical connection between drive shell grounding and system shell grounding, or
else unexpected results will occur.
19
Page 31

DAH01, DAH2075E AC Servo Drive Unit User Manual
3-phase or single
phase AC220v
Servo enable
Alarm chearing
CCW drive prohibition
CW drive prohibition
Speed selection 1
Speed selection 2
CCW torque limitation
CW torque limitation
Zero-speed clamping input
Speed arrival
Servo alarm
Servo ready
Output common terminal
DAH01 AC servo drive unit
RS485 transceiver
Shell
Motor cable
terminal
Encoder interface 2
Servo motor
Absoulute
encoder
Speed command (-10V~+10V DC)
Brake release signal Ground
Encoder Z phase output GND
Speed command ground
Brake release signal
Encoder Z phase output
Pulse feedback A
Pulse feedback B
Pulse feedback C
To connect to system shell GND
Figure 3-1-4 Standard Connection for DAH01 Speed Control (Analog Voltage Mode)
Note: there must be good electrical connection between drive shell grounding and system shell grounding, or
else unexpected results will occur.
20
Page 32

Chapter 3 Connection
3.2 Terminal Function
3.2.1 Terminal Configuration for DAH01 (Ethernet Interface), DAH2075E Servo Drive Unit Interface
1) Terminal Configuration
In figure 3-2-1-1, BUS1 indicates bus interface 1, BUS2 indicates bus interface 2; in figure
3-2-1-2, CN2 indicates the connector of a 26-pin encoder.
总线接口1(BUS1)
Bus interface 1 (BUS 1)
Bus interface 1 (BUS 1) pin explanation
总线接口1(BUS1)引脚 说 明
引脚说明
TX1+ ,白绿色线
TX1- ,绿色线
RX1+ ,橙白色线
NC ,兰色线
NC ,兰白色线
RX1- ,橙色线
NC ,棕白色线
NC ,棕色线
引脚说明
TX2+ ,白绿色线
TX2- ,绿色线
RX2+ ,橙白色线
NC ,兰色线
NC ,兰白色线
RX2- ,橙色线
NC ,棕白色线
NC ,棕色线
12
PEA+ (for test)
10
PEZ+ (for test)
CLK+ 8
+5V 6
0V 4
2
0V
Pin number Explanation
引脚号
1
8
7
6
5
4
3
2
1
1 TX1+, white-green wire
2
2 TX1+, green wire
3
3 RR1+, orange-white wire
4
4 NC, blue wire
5
5 NC, blue wire
6
6 RX2-, orange wire
7
7 NC, brown-white wire
8
8 NC, brown wire
总线接口2(BUS2)
Bus interface 2 (BUS 2)
8
7
6
5
4
3
2
1
Bus interface 2 (BUS) pin explanation
总线接口2(BUS2)引脚 说 明
1 TX2+ white-green wire
引脚号
2 TX2- green wire
1
3 RX2+, orange-white wire
2
3
4 NC, blue wire
4
5 NC, blue-white wire
5
6 RX2-, orange wire
6
7 NC, brown-white wire
7
8 NC, brown wire
8
Fig. 3-2-1-1 Wiring for Bus Interface 1 and 2 of Servo Unit of DAH01
(Ethernet Interface) and DAH2075E
26
24
22
18
PEA-(for test)
PEZ-(for test)
CLK- 20
+5V
0V 16
FG 14
23
21
19
SD+25
PEB-(for test)
+5V 17
FG 15
SD- 13
11
PEB+(for test)
+3.6V 9
7
+5V 5
0V 3
1
0V
Type of CN2 Plug Connector: 10126-3000PE
Type of CN2 Shell Kit: 10326-52F0-008
Fig. 3-2-1-2 Wiring for Servo Unit Encoder Interface CN2 (26 Pins) of DAH01
(Ethernet Interface) and DAH2075E
21
Page 33

DAH01, DAH2075E AC Servo Drive Unit User Manual
Fig. 3-2-1-3 Wiring for Encoder Interface CN2 (26 Pins) of Servo Unit of DAH01
(Ethernet Interface) and DAH2075E
Note: +5V and 0V power lines are respectively connected to the aviation plug with 4 and 5 wires combined
together, 3.6 V power line is connected to the aviation plug with 2 wires combined together, pin 7 and
pin 9 need to be shorted in high-density 26-pin plug in order to reduce the power voltage attenuation
during long-distance cable transmission.
3.2.2 Terminal Configuration for Servo Drive Unit Interface of DAH01 (Pulse and Analog
Command Mode)
1) Terminal Configuration
In figure 3-2-2-1, CN1 is a DB44 connector, with male socket and female plug; in figure
3-2-2-4, CN2 is a DB25 connector, with female socket and male plug.
22
Page 34

Chapter 3 Connection
T
g
16
1 SG Analog command ground
31 PE 保护接地
31 PE protective earthin
17 VCMD analog speed command
17 VCMD 模拟速度指令
2
20 SRDY servo ready output
20 SRDY 伺服准备好输出
5 ALM alarm output
5 ALM 报警输出
35 COIN positioning completion /speed arrival
35 COIN 定位完成/速度到达
6 HOLD- 抱闸输出
6 HOLD- brake output
36 Z- Z signal output-
36 Z- Z 信号输出-
7 HOLD+ 抱闸输出+
7 HOLD+ brake output +
37 Z+ Z 信号输出+
37 Z+ Z signal output +
23 SON 伺服使能
23 SON servo enable
8 ALRS 报警清除
8 ALM alarm clearing
38 COM+ 控制信号电源输入(24VDC)
38 COM+ control signal power input (24V DC)
24 FSTP CCW 驱动禁止
24 FSTP CCW drive prohibition
9 RSTP CW 驱动禁止
9 RSTP CW drive prohibition
39 COM+ control signal power input (24VDC)
25 FIL CCW torque limit
10 RIL CCW torque limit
40 CLE/SC1 deviation zeroing/speed selection 1
26 ZSL zero-speed clamping
41 INH/SC2 command pulse prohibition/speed selection2
27 PAOUT+ pulse feedback A+
12 PAOUT- pulse feedback A42 PZOUT+ pulse feedback Z+
28 PBOUT+ pulse feedback B+
13 PBOU
43 PZOUT- pulse feedback Z-
29 SIGN+ direction signal input+
14 SIGN- direction signal input-
44 GND internal digital ground
30 PULS+ pulse command signal input +
15 PULS- pulse command signal input -
-pulse feedback B-
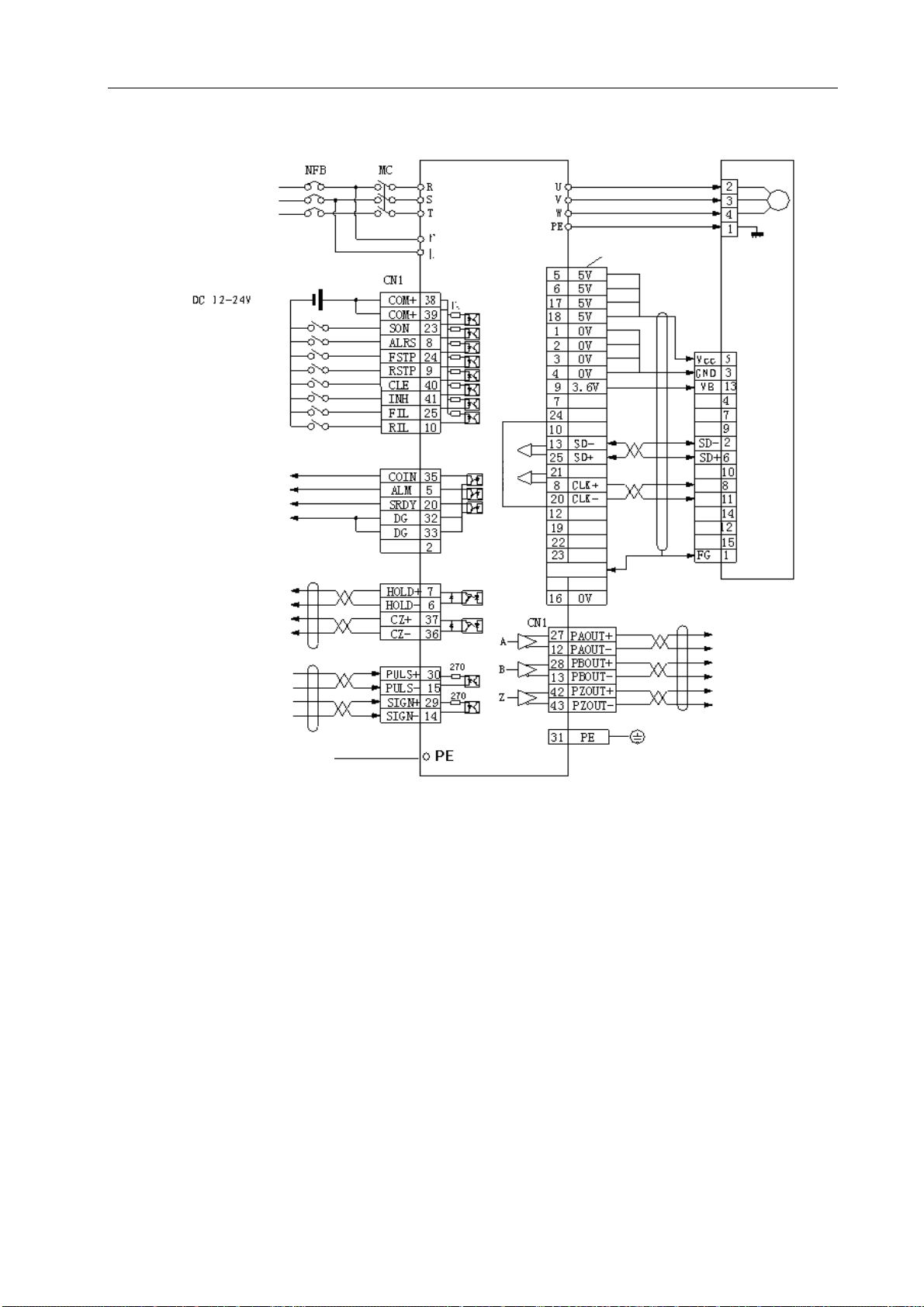
Fig. 3-2-2-1 Connection for Control Port CN1 (Pulse and Analog Command Mode) of DAH01
23
Page 35

DAH01, DAH2075E AC Servo Drive Unit User Manual
R
S
T
PE
U
V
W
P
D
r
t
TB
Fig. 3-2-2-2 Connection for DAH2075E Fig. 3-2-2-3 Connection for DAH01
Power Terminals Power Terminals
Servo unit
Servo motor
13
CN2
DB25
25
12
24
11
23
10
22
9
21
8
20
7
19
6
18
5
17
4
16
3
15
2
14
1
Fig. 3-2-2-4 Connection for Encoder Interface CN2 (25 pins) of Drive Unit of DAH01
Brown wire
SD-
棕线
Green wire
绿线
SD+
Red wire
红线
15-pin motor socket
Blue-white wire
蓝白线
+3.6V
Purple-white wire
紫白线
CLK+
Black-white wire
黑白线
CLK-
Black wire
黑线
Green-white wire
绿白线
+5V
Blue wire
蓝线
+5V
Yellow wire
+5V
黄线
Orange wire
橙线
+5V
Yellow-white wire
黄白线
0V
Purple wire
紫线
0V
Orange-white wire
橙白线
0V
Ground wire
FG
地线
Brown-white wire
0V
棕白线
Ground wire
FG
地线
Red-white wire
红白线
0V
电机的 15 针插座
FG
SD0V
+5V
SD+
+3.6V
CLK+
CLK-
Ground wire (grey wire and
wire fence)
1
Blue-black wire
2
Black, brown-black
3
Red wire
5
Blue wire
6
13
8
11
Absolute
encoder
interface
24
Page 36

2) DAH01 Drive Unit Power Terminal TB
Table 3-1 Power Terminal TB
Chapter 3 Connection
Terminal
number
TB-1 R
TB-2 S
TB-3 T
Terminal
mark
Signal name Function
Single-phase or
three-phase
major loop
power
Major loop power input terminal
AC220V 50Hz
Note: do not connect it to motor output
terminals U,V and W.
grounding terminal
TB-4 PE
System
grounding
grounding resistance<0.1Ω;
The servo motor output and power input are
grounded at a common point.
TB-5 U
TB-6 V
TB-7 W
Servo motor
output
The servo motor output terminal must be
connected to motor terminals U, V and W
correspondingly.
TB-8 P reserved
TB-9 D reserved
TB-10 r
TB-11 t
single-phase
control power
Control loop power input terminal
supply
AC 220V 50Hz
3) DAH01 Drive Unit Control Terminal CN1
Control mode abbreviation: P for position control mode
S for speed control mode
Table 3-2 control signal input/output terminal CN1
Term inal
number
CN1-38
CN1-39
Term inal
name
Mark I/O Mode Function
Power
supply
positive pole
COM+ Type1
of input
terminal
The positive pole of the input terminal is used
to drive the photoelectric coupler of the input
terminal.
DC12 V~24V,current≥100mA
Servo enable input terminal
SON ON:to enable the operation of the drive
unit
SON OFF:The drive unit is turned off and
CN1-23
Servo
enable
SON Type1
Note 1: before SON OFF is switched to SON ON,
the motor must be in the state of rest.
Note 2: after switching to SON ON, do nto input
commands until 50ms is waited.
stops working, the motor is in free
state.
25
Page 37

CN1-8
CN1-24
CN1-9
CN1-40
Alarm
clearance
CCW drive
prohibition
CW drive
prohibition
Deviation
counter
zeroing
Speed
selection 1
DAH01, DAH2075E AC Servo Drive Unit User Manual
Alarm clearance input terminal
ALRS ON:clear system alarm
ALRS OFF:keep system alarm
ALRS Type1
Note: this method is not available to clear
those alarms with fault codes above 8.
In this case, turn off the power and
overhaul the drive unit, then turn on
the power again.
CCW (counter clockwise) drive prohibition
input terminal
FSTP ON:CCW drive enable
FSTP OFF:CCW drive prohibition
FSTP Type1
Note 1: used for mechanical ultra limit.
When the switch is OFF, the CCW
torque remains unchanged at 0.
Note 2: setting parameter No. 20 can shield
this function or make the switch
always ON.
CW (clockwise) drive prohibition input
terminal
RSTP ON:CW drive enable
RSTP OFF:CW drive prohibition
RSTP Type1
Note 1: used for mechanical ultra limit.
When the switch is OFF, the CW
torque remains unchanged at 0.
Note 2: setting parameter No. 20 can shield
this function or make the switch
always ON.
The input terminal of the position deviation
CLE Type1 P
counter zeroing
CLE ON: position deviation counter zeroing
during position control
Speed selection 1 input terminal
In speed control mode, the combination of
SC1 and SC2 is used to choose different
kinds of internal speed.
SC1 OFF,SC2 OFF:internal speed 1
SC1 Type1 S
SC1 ON,SC2 OFF:internal speed 2
SC1 OFF,SC2 ON:internal speed 3
SC1 ON,SC2 ON:internal speed 4
26
Note: values 1~4 of internal speed can be
modified with parameters.
Page 38

Continued:
CN1-41
CN1-25
CN1-10
CN1-20
CN1-5
Command
pulse
prohibition
Speed
selection 2
CCW torque
limit
CW torque
limitation
Servo ready
output
Servo alarm
output
INH Type1 P
SC2 Type1 S
FIL Type1
RIL Type1
SRDY Type2
ALM Type2
Chapter 3 Connection
Position command pulse prohibition input
terminal
INH ON:command pulse input prohibition
INH OFF:command pulse input enabled
Speed selection 2 input terminal
In speed control mode, the combination of
SC1 and SC2 is used to choose different
kinds of internal speed.
SC1 OFF,SC2 OFF:internal speed 1
SC1 ON:SC2 OFF:internal speed 2
SC1 OFF,SC2 ON:internal speed 3
SC1 ON,SC2 ON:internal speed 4
CCW (counter clockwise) torque limitation
input terminal
FIL ON:CCW torque limitation is within the
range of parameter No.36.
FIL OFF : CCW torque limitation is not
restricted by parameter No. 36.
Note: whether FIL is valid or invalid, CCW torque
is restricted by parameter No. 34. In
general, parameter No.34>parameter No.36
CW (clockwise) torque limitation input
terminal
RIL ON:CW torque limitation is within the
range of parameter No. 37.
RIL OFF:CW torque limitation is not restricted
by parameter No. 37.
Note: whether RIL is valid or invalid, CW torque is
restricted by parameter No. 35.
Servo ready output terminal
SRDY ON:The control power and the main
power are normal, the drive unit
does not alarm, and the servo
ready output is ON.
SRDY OFF:The main power is not switched
on or an alarm occurs in the
drive unit, the servo ready
output is OFF.
Servo alarm output terminal
ALM ON:The servo drive unit does not alarm,
servo alarm output is ON.
ALM OFF:An alarm occurs in the servo drive
unit, the servo alarm output is
OFF.
27
Page 39

DAH01, DAH2075E AC Servo Drive Unit User Manual
Continued:
Positioning
completion
COIN Type2 P
output
CN1-35
Speed
arrival
SCMP Type2 S
output
Common
CN1-32
CN1-33
terminal of
output
DG
Common
terminal
terminal
Encoder
CN1-37
phase Z
CZ Type2
output
CN1-26
Zero-speed
clamping
ZSL Type1
CN1-36 CZCOM
Positioning completion output terminal
COIN ON:When the value of the position
deviation counter is within the range of
the specified positioning, positioning
completion output is ON.
Speed arrival output terminal
SCMP ON : When the speed reaches or
exceeds the setting speed, the speed arrival
output is ON.
Common terminal of grounding wire for
control signal output terminal (except CZ)
Encoder phase Z output terminal
Photoelectric encoder phase Z pulse output
of the servo motor
CZ ON: Phase Z signal appears
ZSL ON:The servo drive unit is beyond the
control of analog voltage and outputs zero
speed.
ZSL OFF:The servo drive unit is under the
control of the analog voltage.
The common terminal of Z-phase output
terminal of the encoder
CN1-30 PULS+
CN1-15
CN1-29 SIGN+
CN1-14
Command
pulse
PLUS input
Command
pulse SIGN
input
Type3 P
PULS-
Type3 P
SIGN-
shielding
CN1-31
ground
FG Shielding ground wire terminal
wire
CN1-2
CN1-16
analog
ground
AGND S analog ground
Input
CN1-17
analog
VCMD S
command
Type4
CN1-1
Input
analog
command
SG
ground
External command pulse input terminal
Note: the pulse input mode is set by
parameter PA14.
(1) Command pulse+ sign mode;
(2) CCW/CW command pulse
mode;
Input analog command ±10V
Input impedance 20kΩ
S
28
Page 40

Continued:
Brake
CN1-7
output
positive
HOLD+ S/P
terminal
Break
CN1-6
output
negative
HOLD-
terminal
CN1-27
CN1-12
CN1-28
CN1-13
CN1-42
CN1-43
Encoder
pulse A+
Encoder
pulse A-
Encoder
pulse B+
Encoder
pulse B-
Encoder
pulse Z+
Encoder
pulse Z-
PAOU T+ S
PAOU T- S
PBOUT+
PBOUT-
PZOUT+
PZOUT-
4) Feedback Signal Terminal CN2
Table 3-3 Encoder Signal Input/Output Terminal CN2
Terminal
number
Signal name
Terminal mark
Mark I/O Mode
CN2-5
CN2-6
CN2-17
Power output + +5V
CN2-18
CN2-1
CN2-2
CN2-3
Power output - OV
CN2-4
CN2-16
CN2-7
CN2-8
Battery output + +3.6V
CN2-9
CN2-13
Encoder
SD-input
SD-
Type2
Type5
Type6
When the drain electrode open circuit output
works normally, the photoelectric coupler
conducts and the output is ON.
When an alarm occurs, the photoelectric
coupler is cut off and the output is OFF.
S/P
Encoder feedback output signal, standard is
2500/line.
The desired pulse number may be output by
adjusting PA41 (output pulse number
parameter), e.g., if requiring the encoder to
output 15000 pulses per revolution, let
PA41=15000, then the signals of phase A and
phase B which are output from the drive unit
side are 15000 pulses/revolution.
Motor outputs one pulse per revolution
Color Function
Chapter 3 Connection
The servo motor absolute encoder uses
+5V power; When its cable is long,
multiple core wires should be used in
parallel connection mode.
The servo motor absolute encoder uses
+3.6V power to retain multiple-revolution
data; When its cable is long, it should use
multiple core wires connected in parallel.
When the servo unit is not powered for a
long time, the multiple-revolution data will
be lost because of low battery.
Be connected to the absolute encoder SDof the servo motor
29
Page 41

DAH01, DAH2075E AC Servo Drive Unit User Manual
r
CN2-25
CN2-14
CN2-15
CN2-20
CN2-8
Encoder SD +
input
Shielding
ground wire
for function
extension
For function
Extension
SD+
FG Shielding ground wire terminal
CLK- For function Extension
CLK+ For function Extension
Be connected to the absolute encode
SD+ of the servo motor
3.3 GSK-LINK Bus Communication Principle
GSK-LINK adopts an Ethernet physical layer chip and uses UTP-five categories as its
transmission medium. Cyclic data can only be transferred between master station and servo slave
station while non-cyclic data can be transferred within any stations. GSK-LINK adopts double-loop
topological structure, and the bus topology is shown as figure 3-3-1. The communication module
structure of a master station is the same as that of a slave station.
B
S e rvo un it
Slave station 1
A
U TP-five c atego rie s
Master station of
CNC system
A
B
Fig. 3-3-1 Topology Structure of GSK-Link
3.4 I/O Interface Principle
1) Switch Value Input Interface
B
A
B
A
B
IO m odu le
Slave station n+1
A
Servo unit
Slave station 2
Servo unit
Slave station n
30
Fig. 3-4-1 Type1 Switch Value Input Interface
Page 42

Note
2) Switch Value Output Interface
Note
Chapter 3 Connection
Fig.3-4-2 Type2 Switch Output Interface
3) Analog Value Input Interface
Fig.3-4-3 Type4 Analog Command Input Interface
Note
4) Pulse Value Input Interface
PULS+
PULS-
5
6
Drive unit side
servo amplifier
220
B
7
SIGN+
SIGN-
Fig. 3-4-4 Differential Drive Mode for Pulse Amount Input Interface
220
31
Page 43

DAH01, DAH2075E AC Servo Drive Unit User Manual
servo amplifier
VCC
PULS+
R
PULS-
Drive unit side
220
SIGN+
R
SIGN-
220
Fig. 3-4-5 Type4 Single-ended Drive Mode for Pulse Amount Input Interface
It is suggested to adopt differential drive mode in order to transfer t h e
data of pulse amount correctly.
Adopt AM26LS31, MC3487 or similar RS422 line drive units in the differential
drive mode.
Th e adopt i o n of the single-ended drive mode may reduce the d y n a mic
frequency. D et e r m i n e the value of resistance R under the condition s of
10mA~15mA of current and 25V of max. voltage of the external power in the
pulse input circuit. Empirical data:
Vcc=24V,R=1.3kΩ~2kΩ; Vcc=12V,R=510Ω~820Ω; Vcc=5V,R=82Ω~120Ω。
The external power supply is provided by user s in the single-ended drive
mode. It must be noted that the se r vo drive unit will be damaged if the
power polarity is reversed.
Refer to table 3-4 for the pulse inp u t form. The arrow in it indicates th e
counting edge. Table 3-5 shows the pulse input time sequence parameter.
Table 3-4-1 Pulse input form
32
Page 44

Chapter 3 Connection
Table 3-4-2 Pulse input time sequence parameter
Parameter Differential drive input Single-ended drive input
t
ck
th >0.0763μs >0.191μs
tl >0.0763μs >0.191μs
trh <0.0152μs <0.0228μs
trl <0.0152μs <0.0228μs
ts >0.0763μs >0.191μs
t
>0.608μs >0.76μs
qck
tqh >0.304μs >0.382μs
tql >0.304μs >0.382μs
t
<0.0152μs <0.0228μs
qrh
t
<0.0152μs <0.0228μs
qrl
tqs >0.0763μs >0.191μs
>0.152μs >0.381μs
PULS
SIGN
90%
10%
trh trl
90%
10%
th
CW
ts
trh
tck
CCW
tl
ts
trl
CW
Fig. 3-4-6 Time sequence for pulse+sign input interface (max. pulse frequency: 6.5536MHz)
tck
th
90%
PULS
SIGN
10%
trh trl
90%
10%
tl
ts
CCW
trh
trl
CW
Fig. 3-4-7 Time sequence for CCW/CW pulse input interface (max. pulse frequency: 6.5536MHz)
33
Page 45

DAH01, DAH2075E AC Servo Drive Unit User Manual
5) Output interface for drive unit speed signal
Drive unit side
X+
X-
se rvo a mplifierse rvo m otor
AM26LS32
X=A,B,Z,U,V,W
Fig. 3-4-8 Type5 speed signal output of drive unit
6) Input interface for servo motor absolute encoder
Motor side
Fig. 3-4-9 Type6 Input interface of servo motor absolute encoder
Drive unit side
34
Page 46

Chapter 4 Parameter
CHAPTER 4 PARAMETER
4.1 Parameter List
z The factory value in the following table is an example for the drive units matched with GSK
130SJT-M075D(A4) motors (7.5N.m、3000r/min). Corresponding parameters vary with various
motors.
z Software version: V3.48
z P: position control S: speed control : drive un
bus mode interface.
Ⅰ it pulse/analog command interface : drive unit Ⅱ
Table 4-1 parameter list
No. Description Application Parameter
range
0 password
1 Type code
2 Software version (read
only)
3 Initial state display
4 Control mode selection
5 Speed proportional gain
6 Speed integral time
constant
7 Torque command filter
8 Speed detection low-pass
filter
9 Postion proportional gain P 1~2000 245 ● ●
10 Position feedforward gain P 0~1280 200 0.1 ● ●
11 Position feedforward
low-pass filter cut-off
frequency
12 Position command pulse
division frequency
numerator
P,S
P,S
P,S
P,S
P,S
P,S
P,S
P,S
P,S
P 1~2000 300 Hz ● ●
P 1~32767 8192 ● ●
0~9999 315 ● ●
0~100 66* ● ●
* * ● ●
0~21 0 ● ●
0~7 0 ● ●
5~1280 * 0.1 ● ●
1~32767 * 0.1ms ● ●
40~2000 100 % ● ●
10~2000 40 % ● ●
Factory
value
Unit
Drive unit
interface type
Ⅰ Ⅱ
35
Page 47

DAH01, DAH2075E AC Servo Drive Unit User Manual
Continued:
No. Description Application Parameter
range
Factory
value
Unit
Drive unit
interface type
Ⅰ Ⅱ
13 Position command division
P 1~32767 500 ● ●
pulse denominator
14 Position command pulse
P 0~2 0 ● ○
input mode
15 Position command pulse
P 0~1 0 ● ○
reverse direction
Position command pulse
direction inversion
16 Positioning completion
P 0~32767 20 pulse ● ○
range
17 Position deviation
P 0~32767 4000 ×100 ● ●
detection range
18 Invalid position deviation P 0~1 0 ● ●
19 Speed command low-pass
P 15~15000 100 Hz ● ●
filter cut-off frequency
20 Invalid drive prohibition
P,S
0~1 0 ● ○
input
21 JOG running speed S -6000~6000 120 r/min ● ●
22 Speed command filter
P 0~1 0 ● ●
switch
23 Maximum speed limit
P,S
0~3000 2500 r/min ● ●
24 Internal speed 1 S -6000~6000 0 r/min ● ○
25 Internal speed 2 S -6000~6000 100 r/min ● ○
26 Internal speed 3 S -6000~6000 300 r/min ● ○
27 Internal speed 4 S -6000~6000 -100 r/min ● ○
28 Arrival speed S 0~6000 500 r/min ● ○
29 Reserved
30 Straight-line speed
P,S
1~32767 10 ● ●
conversion numerator
31 Straight-line speed
P,S
1~32767 1 ● ●
conversion denominator
32 Linear speed decimal point
P,S
0~5 3 ● ●
position
33 Speed in motor test mode P 0~6000 100 r/min ● ●
34 Internal CCW torque limit
35 Internal CW torque limit
36 External CCW torque limit
37 External CW torque limit
38 Speed trial run, JOG
P,S
P,S
P,S
P,S
S 0~300 100 % ● ●
0~300 300* % ● ●
-300~0 -300* % ● ●
0~300 100 % ● ○
-300~0 -100 % ● ○
running torque limit
36
Page 48

Chapter 4 Parameter
Continued:
No. Description Application Parameter
range
39 Acceleration time constant S 0~10000 0 1ms ● ●
40 Deceleration time constant S 0~10000 0 1ms ● ●
41 Servo unit output pulse
S 16~32767 2500 p/r ● ○
number
42 Reserved
P,S
0~1 0
43 Speed command selection S 0~1 1 ● ○
44 reserved
45 reserved
46 Motor rotation direction
S 0~3 0 ● ●
control
47 AD conversion analog
S 20~3000 1000 ● ○
command gain
48 AD conversion analog
S 0~32767 2767 ● ○
command zero drift
adjustment
49 reserved
50 Analog command low-pass
S 0~32767 200 Hz ● ○
filter cut-off frequency
51 Analog command AD
S 0~32767 ● ○
result filter low-pass
frequency
52 Parameter auto setting
P,S
1~100 40 % ● ●
current limit value
53 Parameter auto setting
P,S
10~2000 200 ● ●
speed filter coefficient
54 analog gain in positive
S 20~3000 1000 0.001 ● ○
analog voltage
55 Analog gain in negative
S 20~3000 1000 0.001 ● ○
analog voltage
56
When Feedback pulse >
S 0~32767 0.1ms ● ○
10000, pulse output time in
advance
57 reserved
58 Acceleration feedback gain
P,S
0~-10000 0 0.001 ● ●
59 reserved P 1~4 2
60 Current proportional gain
61 Current integral time
P,S
P,S
0~12800 1500 ● ●
0~32767 110 0.1ms ● ●
constant
Note: ● for validity, ○ for invalidity
Factory
value
Unit
Drive unit
interface type
Ⅰ Ⅱ
37
Page 49

DAH01, DAH2075E AC Servo Drive Unit User Manual
4.2 Specification for Parameter Meaning
Table 4-2 Parameter Function
No.
Description Parameter
range
Default
value
Unit Application
Drive unit
interface type
Ⅰ Ⅱ
PA0
PA1
Parameter
password
0~9999 315
P,S
● ●
① Used for preventing parameters from being modified by mistake. In general, when a
parameter needs to be set, set the parameter to desired password firstly, and then
perform adjustment. After debugging, set the parameter to 0 to ensure the parameter will
not be modified by mistake.
② There are different password levels corresponding to user parameter, system parameter
and all parameter respectively.
③ Only type code passwords can be used to modify type code parameters (PA1), other
passwords are unavailable for modifying the parameters.
User password is 315, and type code password is 385.
Motor type code 0~100 66
P,S
● ●
① Corresponds to a series of servo units and motors with different power.
② Different type codes correspond to different parameter default values. When using the
function of default parameter restoration, ensure the correctness of the parameter.
③ When absolute encoder disconnection alarm or invalid motor type alarm occurs
immediately after power is turned on, default parameters should not be restored
automatically until the trouble is cleared. Otherwise, the drive unit will be abnormal or
damaged.
④ Before modifying the parameter, set password PA0 to 385.
⑤ See this chapter for detailed information about the parameter.
38
PA2
PA3
Software version \ 3.06
P,S
● ●
Software version can be checked but not be modified (read only)
Initial display state 0~20 0
Parameter
value
Explanation Parameter
value
P,S
● ●
Explanation
PA3=0 Display motor speed PA3=11 Display position command
pulse frequency
PA3=1 Display current position low
PA3=12 Display speed command
order 4 digits
PA3=2 Display current position high
PA3=13 Display torque command
order 4 digits
PA3=3 Display position command
(accumulation) low order 4
PA3=14 Display absolute encoder
single-revolution data
digits
Page 50

Continued:
Parameter
value
PA3=4 Display position command
(accumulation) high order 4
PA3=5 Display position deviation
PA3
PA3=6 Display position deviation high
PA3=7 Display motor torque PA3=18 Display encoder input signal
PA3=8 Display motor current PA3=19 Display running state
PA3=9 Display linear speed PA3=20 Display alarm code
PA3=10 Display control mode PA3=21 Display analog command
No. Description
Control mode
selection
①:Set the control modes of the drive unit by this parameter.
Explanation Parameter
value
PA3=15 Display absolute encoder
digits
PA3=16 Display input terminal state
lower order 4 digits
PA3=17 Display output terminal state
order 4 digits
Parameter
range
Default
value
Unit Application
0~7 0
P,S
Chapter 4 Parameter
Explanation
multiple-revolution data
voltage value
Drive unit
interface type
Ⅰ Ⅱ
● ●
PA4
0:Position control mode 1:Speed control mode
2:Trial run control mode 3:JOG control mode
4:Encoder zero-setting mode 5:Motor test mode
6:Open-loop running mode (used for motor test and encoders)
7:Drive unit type writing mode
② Explanation
a:Position control mode: position command is output from the pulse input port.
b:Speed control mode: whether the speed commands are input from input terminals or
analog value is decided by parameter [internal or external speed command selection]
(PA42). When using internal speed, use the combination of SC1 and SC2 to select
different kinds of internal speed.
c:Trial run control mode: the speed command is input from the keyboard. It is used for
testing drive units and motors.
d:JOG control mode: In JOG mode, the motor runs at JOG speed when ↑ is pressed and
held, while the motor stops and remains zero speed when the button is released; the
motor runs reversely at JOG speed when ↓ is pressed and held, while the motor stops
and remains zero speed when the button is released.
e:Encoder zero-setting mode: used for the adjustment of the code disc zero point before
delivery.
f:Motor test mode: used to test drive units and motors in position control mode.
g:Open-loop running mode: used for equipment maintenance by manufacturer technician.
h:Drive unit type writing mode: used for writing drive unit types before delivery.
39
Page 51

Continued:
No. Description
Speed proportional
gain
PA5
① Set the proportional gain for the speed loop regulator.
② The greater the setting value is, the higher the gain is and the bigger the rigid is. The
parameter value is decided by actual servo drive unit types and load conditions.
③ Set the value as big as possible when no vibration is produced in the system.
Speed integral time
constant
① It sets the integral time constant for the speed loop regulator.
PA6
② The smaller the setting value is, the faster the integral speed is and the bigger the rigid is.
The parameter value is decided by actual servo drive unit types and load conditions. In
general, the greater the load inertia is, the greater the setting value is.
③ Set the value as small as possible when no vibration is produced in the system.
Torque command
filter coefficient
① It sets torque command filter characteristics. Resonance (sharp vibration noise made by
PA7
the motor) produced by the torque can be curbed.
② If the motor makes sharp vibration noise, please reduce the parameter value.
③ The smaller the value is, the lower the cut-off frequency and the motor noise are. If the load
inertia is too large, reduce the setting value appropriately. An excessively small value will
cause slow response and instability.
④ The greater the value is, the higher the cut-off frequency is and the faster the response is.
If higher mechanical rigid is required, increase the setting value appropriately.
Speed detection
low-pass filter
coefficient
① It sets speed detection low-pass filter characteristics;
PA8
② The smaller the value is, the lower the cut-off frequency and the motor noise are. If the load
inertia is too large, reduce the setting value appropriately. An excessively small value will
cause slow response and vibration.
③ The greater the value is, the higher the cut-off frequency is and the faster the speed
feedback response is. If higher speed response is required, increase the setting value
appropriately.
Position proportional
gain
① It sets the proportional gain for the position loop regulator
PA9
② The greater the setting value is, the higher the gain is, the bigger the rigid is and the
smaller the position lag is. However, an excessively big value may cause vibration or
overshoot.
③ The parameter value is decided by actual servo drive unit types and load conditions.
DAH01, DAH2075E AC Servo Drive Unit User Manual
Drive unit
Parameter
range
5~1280 155 0.1
0~32767 85 0.1ms
40~2000 100 %
10~2000 40 %
Default
value
Unit Application
P,S
P,S
P,S
P,S
interface type
Ⅰ Ⅰ
● ●
● ●
● ●
● ●
0~2000 245 0.001 P ● ●
40
Page 52

Continued:
×
No. Description
Position feedforward
gain
① It sets the feedforward gain for the position loop.
② When it is set to100%, it means the position lag is always zero in any frequency of
PA10
PA11
A12
command pulses.
③ Increasing the position loop feedforward gain can improve the high-speed response
characteristics of the control system, but also cause system instability and vibration.
④ The position loop feedforward gain is usually 0 unless extremely high response
characteristic is needed.
Position feedforward
low-pass cut-off
frequency
① It sets the feedforward low-pass filter cut-off frequency for position loop
② This filter is used for increasing the stability of compound position control.
Position command
pulse frequency
division numerator
① It sets the frequency division and frequency doubling (electronic gear) for position
command pulse
② In the position control mode, various pulse sources can be matched conveniently by setting
parameter PA12 and PA13 to reach desired control resolution (i.e., angle/pulse).
③
P: pulse number of input command;
G: electronic gear ratio
=G
N: motor rotation number
C: photoelectric encoder line/revolution, C=131072 in this system.
④ Example: when the input pulse is 6000, the servo motor rotates 1 time,
=
G
P
Then parameter PA12 is set to 8192, PA13 is set to 375.
⑤ The recommended range for electronic gear ratio is:
Division frequency
PA13
denominator of position
command pulse
Refer to PA12.
Chapter 4 Parameter
Drive unit
interface type
Ⅰ Ⅰ
4××=× CNGP
Parameter
range
0~1280 0 0.1 P ● ●
1~2000 300 Hz P ● ●
0~32767 8192 P ● ●
Default
value
Unit Application
numeratorfrequency Division
rdenominatofrequency Division
1310721
×
CN
=
6000
8192
=
375
1
50
0~32767 500 P ● ●
50
≤≤ G
41
Page 53

Continued:
No. Description
Input mode of
position command
pulse
It sets the input form of position command pulse:
PA14
0: pulse+sign 1: CCW pulse/CW pulse 2: quadrature encoder pulse
Note 1: CCW is observed from the radial direction of the servo motor, CCW rotation is defined as
the positive direction.
Note 2: CW is observed from the axial direction of the servo motor, CW rotation is defined as the
negative direction.
Position command
pulse direction
PA15
inversion
It is set to: 0: normal 1: reverse position command direction
DAH01, DAH2075E AC Servo Drive Unit User Manual
Drive unit
Parameter
range
Default
value
Unit Application
interface type
Ⅰ Ⅱ
0~2 0 P ● ○
0~1 0 P ● ○
PA16
PA17
PA18
PA19
Positioning
completion range
0~32767 20 P ● ○
① It sets the pulse range of positioning completion in position control
② This parameter provides judgements for a drive unit to judge whether the positioning is
completed in position control mode. When the afterpulse number in the position
deviation counter is smaller than or equal to the setting value of the parameter, the drive
unit assumes that the positioning is completed, and the positioning completion signal
COIN is ON, otherwise COIN is OFF.
③ In position control mode, the position completion signal COIN is output; in other control
modes, the speed arrival signal SCMP is output.
Position deviation
detection range
0~32767 4000 P ● ●
① It sets the detection range for position deviation alarm.
② When the counter value of the position deviation counter exceeds the value of the
parameter, the servo drive unit gives position deviation alarm.
Invalid Position
deviation error
0~1 0 P ● ●
It is set to:
0: position deviation alarm detection is valid
1: position deviation alarm detection is invalid, and position deviation error detection is
stopped.
Speed command
low-pass filter
15~15000 100 P ● ●
cut-off frequency
① It sets the low-pass filter cut-off frequency for position loop output value. The filter is
used for improving the stability of the compound position control.
② When PS22=0, the parameter is invalid; when PA22=1, the parameter is valid.
42
Page 54

Continued:
No. Description
Paramete
r range
Default
value
Chapter 4 Parameter
Unit Application
Drive unit
interface type
Ⅰ Ⅱ
PA20
PA21
PA22
PA23
Invalid drive
prohibition input
0~1 0
P,S
● ○
When it is set to:
0: CCW and CW input prohibition are valid. When CCW drive prohibition switch (FSTP) is
ON, CCW drive is enabled. When CCW drive prohibition switch (FSTP) is OFF, CCW
torque keep unchanged as o; CW is similar. If both of CCW and CW drive prohibition are
OFF, the alarm for drive prohibition input error will be given.
1: CCW and CW input prohibition cancel. Whatever state CCW and CW drive prohibition
switch are in, CCW and CW drive are enabled. Meanwhile, even if both of CCW and CW
drive prohibition are OFF, the alarm for drive prohibition input error will not be given.
JOG running speed
-6000~
6000
100 r/min S ● ●
It sets the running speed for JOG operation
Speed command
filter switch
0~1 0 P ● ●
In position control mode, when it is set to 1, the function of the speed command filter is
enabled; when it is set to 0, the function is disabled.
Max. speed limit 0~3000 3000 r/min
P,S
● ●
① It sets the max. speed limit for the servo motor.
② Not related to the rotation direction.
PA24
~
PA27
PA28
Internal speed 1~4
-6000~60
00
0 r/min S ● ○
SC1 SC2 Internal speed
OFF OFF
OFF ON
ON OFF
ON ON
Internal speed (PA24)
Internal speed 2(PA25 )
Internal speed 3(PA26 )
Internal speed 4(PA27 )
Arrival speed 0~6000 500 r/min S ● ○
① It sets the arrival speed
② In non-position control mode, if the motor speed exceeds the setting value, the SCMP is
ON, or else SCMP is OFF.
③ The parameter is not used in position control mode.
④ It is not related to the rotation direction.
⑤ The comparator has hysteresis characteristic.
43
Page 55

Continued:
No. Description
Straight-line speed
conversion
numerator
① Used for displaying the system straight-line speed
②
PA30
③ The decimal point position of the straight-line speed is decided by parameter PA32. 0
means no decimal point, 1 means decimal point in ten’s place, 2 means decimal point in
hundred’s place, and so on.
④ Example: when the servo motor drives a ballscrew of 10mm, set the conversion
numerator of the straight-line speed to 10, denominator to 1, decimal point position to 3.
The straight-line speed can be displayed on the screen in m/min, when the motor speed is
500r/min, the screen will display the straight-line speed of 5.000m/min.
Straight-line speed
conversion
PA31
denominator
DAH01, DAH2075E AC Servo Drive Unit User Manual
Drive unit
Parameter
range
1~32767 10
Default
value
speed motorspeed line Straight ×=
Unit Application
P,S
interface type
Ⅰ Ⅱ
● ●
numerator conversion speed line-straight
rdenominato conversion speed line-straight
1~32767 1
P,S
● ●
PA32
PA33
PA34
PA35
Refer to parameter PA30
Decimal point position
of straight-line speed
0~5 3
P,S
● ●
Refer to parameter PA30
Speed in motor test
mode
When the servo unit is in position control mode, select “oL”and press
0~6000 100 r/min P ● ●
to enter motor test
mode. The test speed is decided by the parameter.
Internal CCW
torque limit
0~300 300 %
P,S
● ●
① It sets the internal torque limitation when the servo motor performs CCW rotation.
② The setting value is the percentage of the rated torque, for example, if the desired result is
two times that of the rated torque, set the value to 200.
③ The limit is always valid.
④ If the setting value exceeds the max. overload capacity permitted by the system, the
actual torque limitation is the max. overload capacity.
Internal CW torque
limitation
-300~0 -300 %
P,S
● ●
① It sets the value of the CW internal torque limitof the servo motor.
② The setting value is the percentage of the rated torque. For example, if the desired result
is twice that of the rated torque, set the value to -200.
③ The limit is always valid.
④ If the setting value exceeds the max. overload capacity permitted by the system, the
actual torque limitation is the max. overload capacity.
44
Page 56

Continued:
No. Description
External CCW
torque limit
① It sets the value of external torque limitation when the servo motor performs CCW
rotation.
PA36
② The setting value is the percentage of rated torque. For example, if the desired result is
once that of the rated torque, set the value to 100.
③ The limit is valid only when the input terminal (FIL) of the CCW torque limitation is ON.
When the limit is valid, the actual torque limitation is the smallest value of the absolute
values of system permissible max. overload capacity, internal CCW torque limit and external
CCW torque limit.
External CW torque
limit
① It sets the external torque limit when the servo motor performs CW rotation.
② The setting value is the percentage of the rated torque. For example, if the desired result
PA37
is once that of the rated torque, set the value to -100.
③ The limit is valid only when the input terminal (RIL) of CW torque limit is ON.
④ When the limit is valid, the actual torque limit is the smallest value of the absolute values
of max. system permissible overload capacity, internal CW torque limit and external CW
torque limit.
Torque limit of
speed trial run and
JOG operation
PA38
① It sets the torque limitation in the speed trial run and JOG operation.
② It is not related to the rotation direction, and bidirection is valid.
③ The setting value is the percentage of the rated torque. For example, if the desired result
is once that of the rated torque, set the value to 100.
④ The internal and external torque limit is still valid.
Acceleration time
constant
① The setting value shows the motor acceleration time from 0r/min to 1000r/min.
PA39
② Acceleration/deceleration characteristics are linear.
③ Only used in the speed control mode, invalid in the position control mode.
④ If the drive unit is used in combination with an external position loop, the parameter should
be set to 0.
Deceleration time
constant
① The setting value is the motor deceleration time from 1000r/min~0r/min.
PA40
② Acceleration/deceleration characteristics are linear.
③ Only used in speed control mode, invalid in position control mode.
④ If drive units are used in combination with external position loops, the parameter should
be set to 0.
Chapter 4 Parameter
Parameter
range
0~300 100 %
-300~0 -100 %
Default
value
Unit Application
P,S
P,S
0~300 100 % S ● ●
0~10000 0 1ms S ● ●
0~10000 0 1ms S ● ●
Drive unit
interface type
Ⅰ Ⅱ
● ○
● ○
45
Page 57

Continued:
No. Description
Servo unit output
pulse number
PA41
The pulse number, which is output to an upper computer by per-revolution feedback data
from an encoder, is set by this parameter in the drive unit. For example, if the desired signal
of phases A and B output from the drive unit is 15000pulses/revolution, set the parameter to
15000.
Speed command
selection
PA43
Whether the running speed comes from internal speed or analog command:
0 internal command speed
1 external command speed
Motor rotation
direction control
DAH01, DAH2075E AC Servo Drive Unit User Manual
Parameter
range
Default
value
Unit Application
Drive unit
interface type
Ⅰ Ⅱ
0~32767 2500 p/r S ● ○
0~1 1 S ● ●
0~3 0 S ● ●
PA46
PA47
PA48
PA50
0 normal
1 speed command is reversed speed command inversion.
2 output pulse rotation direction inversion.
3 Both are inversed.
Analog command
gain coefficient
20~3000 1000 0.001 S ● ○
The greater the gain that the analog command converts to speed is, the higher the rigid is.
However, an excessively great value will cause system vibration. In position control mode,
the parameter is invalid. It works together with parameter number 54 and number 55. The
speed command actual gain is equal to PA47*PA54 when the analog command voltage is
positive, and equal to PA47*PA55 when negative.
Analog command
zero-drifted
0~32767 2767 S ● ○
compensation
Even if the command voltage is 0V, the motor may still rotate at very low speed sometimes.
This is because the command voltage (unit: mv) from an upper computer or external has
slight offset (command offset). If there is zero-drifted phenomenon in the motor, offset the
reverse voltage value of (zero-drifted rotating speed *10) in PA48.
Analog command
low-pass filter
0~32767 200 S ● ○
cut-off frequency
① Analog command filter: increasing the parameter can improve the speed response while
reducing the parameter can make the motor speed smoother. The smaller the parameter
is, the slower the motor speed response is, and vice versa.
② The smaller the value is, the stronger the anti-interference ability is; the greater the value
is, the weaker the anti-interference ability is.
46
Page 58

Continued:
No. Description
Parameter auto
setting current limit
PA52
value
When the servo performs parameter auto setting, the parameter used for limiting the current
Parameter auto
setting speed filter
PA53
coefficient
When the servo performs parameter auto setting, the speed low-pass filter cut-off frequency
Analog gain in
positive analog
voltage
PA54
① It works together with parameter No.47 to affect the analog command voltage gain. Refer
to parameter No.47.
② Difference between positive and negative voltages of external analog commands causes
inconsistency between position feedback following error of motor positive rotation and the
one of negative rotation. To achieve consistency, adjust this parameter.
Analog gain in
negative analog
voltage
PA55
① It works together with parameter No.47 to affect analog command voltage gain. Refer to
parameter No.47.
② Difference between positive and negative voltages of external analog commands causes
inconsistency between position feedback following error of motor positive rotation and
the one of negative rotation. To achieve consistency, adjust this parameter.
Pulse output time in
advance when
PA56
parameter No. 41 is
greater than 10000.
Ensure the output is corret when absolute encoder position data is converted to relative
pulse data, the factory setting is done.
Acceleration
command
feedforward gain
Acceleration feedback function means the acceleration, which is obtained by differentiating
PA58
the speed feedback signal of the motor with softwares, multiplies the acceleration feedback
gain to compensate the torque command. It is used to curb vibration of a speed loop. For
example, When vibration is generated because of system instability, such as the connection
between motor and mechanical system is elastic and the mechanical inertia is bigger than
the motor inertia, the function can stabilize the servo system.
Chapter 4 Parameter
Drive unit
Parameter
range
1~100 40 %
output value is set by manufacturer.
10~2000 200
coefficient is set by the manufacturer.
20~3000 1000 S ● ○
20~3000 1000 S ● ○
0~32767 20 S ● ○
0~-10000 0 0.001
Default
value
Unit Application
P,S
P,S
P,S
interface type
Ⅰ Ⅱ
● ●
● ●
● ●
47
Page 59

Continued:
No. Description
DAH01, DAH2075E AC Servo Drive Unit User Manual
Drive unit
Parameter
range
Default
value
Unit Application
interface type
Ⅰ Ⅱ
Current proportional
gain
0~12800 1500 0.001
P,S
● ●
①It sets the proportional gain for a loop regulator.
PA60
②The greater the setting value is, the higher the gain is and the smaller the current following
error is. However, an excessively high gain will cause noise or vibration.
③ It is only related to the servo drive unit and motor, not to the load.
④ Set the value as great as possible under the condition of no vibration in the system.
Current integral
time constant
0~32767 110 0.1ms
P,S
● ●
① It sets the current loop to adjust integral time constant.
② The smaller the setting value is, the faster the integral speed is and the smaller the
PA61
current following error is. However, excessively small integral time will cause noise or
vibration.
③ Only related to the servo drive unit and motor, not to the load; in general, the greater the
motor electromagnetic time constant is, the greater the integral time constant is.
④ Set the value as small as possible under the condition of no vibration generated in the
system.
4.3 Comparison Table of Type Code Parameters and Spindle Motors
Table 4-4 comparison table for No.1 parameter and SJT servo motors with absolute encoders
№1
parameter
61
62
63
64
65
66
67
68
69
59
25
27
26
28
26
28
110SJT-M040D(A4),1.0kW, 300V, 2500 r/min, 4.5A, 0.68×10
110SJT-M060D(A4),1.5 kW 300V, 2500 r/min, 7A, 0.95×10
130SJT-M040D(A4),1.0 kW 300V, 2500 r/min, 4A, 1.1×10
130SJT-M050D(A4),1.3 kW 300V, 2500 r/min, 5A, 1.1×10
130SJT-M060D(A4),1.5 kW, 300V, 2500 r/min , 6A, 1.33×10
130SJT-M075D(A4),1.88 kW, 300V, 2500 r/min, 7.5A, 1.85×10
130SJT-M100B(A4),1.5 kW, 300V, 1500 r/min, 6A, 2.42×10
130SJT-M100D(A4),2.5 kW, 300V, 2500 r/min, 10A, 2.42×10
130SJT-M150B(A4),2.3 kW, 300V, 1500 r/min, 8.5A, 3.1×10
130SJT-M150D(A4),3.9 kW, 300V, 2500 r/min, 14A, 3.6×10
175SJT-M180B(A4),2.8 kW, 300V, 1500 r/min, 15A, 6.5×10
175SJT-M180D(A4),3.8 kW, 300V, 2500 r/min, 16.5A, 6.5×10
175SJT-M220B(A4),3.5 kW, 300V,1500 r/min, 17.5 A, 9.0×10
175SJT-M220D(A4),4.5 kW, 300V,2500 r/min, 19 A, 9.0×10
175SJT-M300B(A4),4.7kW, 300V,1500 r/min, 24 A, 11.2×10
175SJT-M300D(A4),6 kW, 300V,2500 r/min, 27.5A, 11.2×10
Servo motor type and technical parameter Remark
-3
-3
kg.m2
-3
kg.m2
-3
kg.m2
-3
-3
kg.m
-3
-3
-3
kg.m2
-3
kg.m2
-3
-3
kg.m2
kg.m2
-3
kg.m2
2
kg.m2
kg.m2
-3
kg.m2
-3
kg.m2
kg.m2
kg.m2
-3
kg.m2
※
※
※
※
※※
※※
※※
※※
※※
※※
※※
48
Page 60

e
Note
Chapter 4 Parameter
Drive units matching the motors with ※ in the above table must adopt thicken
radiators.
Drive untis matching the motors with ※※ must adopt thickened radiators and
fans.
49
Page 61

DAH01, DAH2075E AC Servo Drive Unit User Manual
CHAPTER 5 ALARM AND TROUBLSHOOTING
Only qualified persons can execute check and maintenance.
Note
Do not touch the driver and motor in 5 minutes after they are switched off to
avoid electric shock and burn.
When an alarm occurs in a drive unit, remove the malfunction firstly
according to the alarm code, and then use the driver.
Before resetting an alarm, confirm SON (the servo is valid) signal is invalid
to avoid unexpected accidents Caused by a motor’s sudden start.
5.1 Alarm List
Table5-1 Alarm List
Alarm code Alarm name Content
-- Normal
1 Overspeed Servo motor speed exceeds its setting value
2 Main circuit overvoltage Main circuit power is overvoltage
3 Main circuit undervoltage Main circuit power is undervoltage
4 Position deviation The value of the position deviation counter
exceeds its setting value.
5 Motor overheat Motor temperature is too high.
6 Speed amplifier saturation
The speed regulator is saturated for a long time.
fault
7 Drive prohibition abnormality Both CCW and CW drive prohibition input are OFF.
8 Position deviation counter
overflow
The absolute value of the position deviation
counter exceeds 2
30.
9 Encoder communication error Encoder communication data error
10 Control power supply
The voltage of the control power is too low.
undervoltage
11 IPM module fault IPM intelligent module fault
12 Overcurrent The motor current is excessive.
13 Overload The servo drive unit and motor are overloaded
(instantaneous overheat)
14 Brake fault Brake circuit fault
15 Motor pole-pairs number error
alarm
The motor pole-pairs number does not match its
corresponding motor.
16 Main circuit power failure alarm No power is supplied in the main circuit.
17 Parameter auto setting failure
alarm
Parameter setting error occurs when the servo
performs parameter auto setting.
18 Invalid motor type The motor type is not written into EEPROM of the
absolute encode.
19 Encoder disconnection alarm Encoder cables are disconnected or broken.
20 EEPROM error EEPROM error
50
Page 62

Chapter 5 Alarm and Troubleshooting
22 Gsk-link initialization failure
alarm
5.2 Alarm Troubleshooting
Fig. 5-2 Alarm troubleshooting
Alarm
code
1 Overspeed
Alarm name
Running
state
Occurs
immediately
after being
connected
to power
supply
Occurs
during
motor
running
Occurs
immediately
after the
motor is
started
① Control circuit board fault
② Encoder fault
Input command pulse
frequency is too high.
Acceleration/deceleration time
constant is too small, making
speed overshoot too high.
The input electronic gear ratio
is too big
Encoder fault Replace the servo motor.
Inferior encoder cable Replace the encoder cable.
Overshoot caused by an
instable servo system
The load inertia is too big.
Encoder zero error
① Motor lead-out wire U, V
② Cable lead-out wire
and W connection error
connection error
Gsk-link initialization failed, DSP reading FPGA
failed, FPGA works abnormally or a wrong program
is downloaded.
Cause Troubleshooting
① Replace the servo drive
unit.
② Replace the servo motor.
Set input command pulse
correctly.
Increase
acceleration/deceleration
time constant.
Set it correctly.
① Reset relative gains.
② If the gain cannot be set
to a proper value, reduce
the ratio of the load
rotary inertia.
① Reduce the load inertia.
② Replace the drive unit
and motor with
higher-power ones.
① Replace the servo motor.
② Request the
manufacture to reset the
encoder zero.
Connect the wires correctly.
51
Page 63

Continued:
2
Main circuit
overvoltage
Main circuit
3
undervoltag
e
DAH01, DAH2075E AC Servo Drive Unit User Manual
Occurs
immediately
after being
connected
Circuit board fault Replace the servo drive unit.
to control
power
supply
Occurs
immediately
after being
connected
① Power supply overvoltage
② Abnormal power supply
to main
power
supply
The rake resistance cable is
disconnected.
① The brake transistor is
② The Internal brake
Occurs
during
motor
running
The brake circuit capacity is
Insufficient.
① Circuit board fault
Occurs
② Power supply fuse
immediately
after being
connected
to control
③ Soft starting circuit fault
④ Rectifier damage
① The power supply voltage
power
supply
② Power is cut off for more
① Insufficient power supply
Occurs
during
② Instantaneous power
motor
running
Radiator overheat Check the loading conditions
voltage waveform
damaged.
resistance is damaged.
damage
is low.
than 20ms temporarily.
capacity
down
Check the power supply.
Re-connect the cable.
Replace the servo drive unit
① Reduce the on-off
frequency.
② Increase the
acceleration/deceleration
time constant.
③ Reduce the torque
limitation value.
④ Reduce the load inertia.
⑤ Replace the drive unit
and motor with
higher-power ones.
Replace the servo drive unit
Check the power supply
Check the power supply
52
Page 64

Continued:
Position
4
deviation
5
Motor
overheat
Occurs
immediately
after being
connected
Circuit board fault
to power
supply
① Incorrect connection for
② Incorrect connection for
The motor
does not
Encoder fault Replace the servo motor.
rotate after
the main
power
supply and
control wire
are
Detecting range of the
position deviation is too
small.
The position proportional
gain is too small.
connected
and
command
pulses are
Insufficient torque
input.
The command pulse
frequency is too high.
No connection between
drive shell and system shell.
Occurs
Circuit board fault Replace the servo drive unit.
immediately
after being
connected
① Broken cable
② Damaged temperature
to power
supply
Occurs
during
The motor is overloaded.
motor
running
Chapter 5 Alarm and Troubleshooting
motor lead-out wires U,
V and W
encoder cable lead-out
wires
relay inside the motor
Replace the servo driver.
Connect the wires correctly.
Increase the detecting range.
Increase the gain.
① Check the torque limitation
value.
② Reduce the load capacity.
③ Replace the drive unit and
motor with higher-power
ones.
Reduce the frequency.
Ensure good electric
connection between the two
shells.
① Check the cable
② Check the motor
① Reduce the load.
② Reduce the on-off
frequency.
③ Reduce the torque
limitation value.
④ Reduce the related gains.
⑤ Replace the drive unit and
motor with higher-power
ones.
Motor internal fault Replace the servo motor.
53
Page 65

Continued:
Speed
amplifier
6
saturation
fault
Drive
7
prohibition
abnormality
Position
deviation
8
counter
overflow
DAH01, DAH2075E AC Servo Drive Unit User Manual
Occurs
during
motor
running
The motor is mechanically
blocked to stop.
Check the mechanical parts of
the load.
① Reduce the load.
Overload
② Reduce the drive unit and
motor with higher-power
ones.
Both the input terminals of
CCW and CW drive
prohibition are
Check the connection and
input terminal power supply.
disconnected.
① Check the mechanical
① Motor is mechanically
blocked to stop.
② Abnormal input
command pulse
parts of the load.
② Check the command
pulse.
③ Check whether the motor
rotation is connected to
command pulses.
9
10
11
Encoder
communicat
ion error
Control
power
supply
undervoltag
e
IPM module
fault
The battery is out of power. Replace the battery.
Encoder wiring error Check the wiring.
The encode is damaged Replace the motor.
Inferior encode cable Replace the cable.
The 485 differential chip is
damaged.
Low encoder voltage caused
by long encoder cables
Low input control power
supply
① Inferior connectors in the
② Abnormal switch power
③ Damaged chip
Occurs
Immediately
after being
connected
Circuit board fault Replace the servo drive unit.
to power
supply
drive unit
supply
Replace the servo drive unit.
① Shorten the cables.
② Supply power with multiply
cores in parallel
connection.
Check the control power
supply.
① Replace the drive unit.
② Check the connectors.
③ Check the switch power
supply.
54
Page 66

Continued:
Chapter 5 Alarm and Troubleshooting
① Low power-up voltage
② Overheat
① Check the drive unit.
② Power on again.
③ Replace the drive unit.
Occurs
during
motor
running
11
IPM module
fault
12 Overcurrent
Occurs
immediately
after being
connected
to control
power
supply
13 Overload
Occurs
during
motor
running
Short circuit among drives
U, V and W
Check the wiring.
Bad ground Be grounded correctly.
Damaged motor insulation Replace the motor.
① Add circuit filters.
being interfered
② Be far away from the
interference source.
Short circuit among drive
units U, V and W
Check the wiring.
Bad ground Be grounded correctly.
Damaged motor insulation Replace the motor.
Damaged drive unit Replace the drive unit.
Circuit board fault Replace the servo drive unit.
① Check the load.
② Reduce the on-off
frequency.
Exceeds the rated torque.
③ Reduce the torque
limitation value.
④ Replace the drive unit and
motor with higher-power
ones.
Hold brake is not switched
on.
The motor is instable and
vibrating.
① Phase U, V or W is
broken.
② Encoder wiring error
Check the hold brake.
① High dynamic gain
② Increase the
acceleration/deceleration
time.
③ Reduce the load inertia.
Check the wiring.
55
Page 67

Continued:
14 Brake fault
Motor
15
pole-pairs
number
error
Main circuit
16
Power
failure alarm
DAH01, DAH2075E AC Servo Drive Unit User Manual
Occurs
immediately
after being
connected
Circuit board fault Replace the servo drive unit.
to control
power
supply
The brake resistance cable
is disconnected.
① Damaged brake
② Damaged internal brake
Occurs
during
motor
running
Insufficient brake circuit
capacity
Power supply of the main
circuit is too high.
Occurs
immediately
after being
connected
to power
supply or
The motor pole-pairs
number does not match its
corresponding motor.
during
motor
running
The main circuit is not
electrified.
The relay of the main circuit
is switched off.
Main circuit undervoltage Check the main power supply.
transistor
resistance
Re-connect the cable
Replace the servo drive unit.
① Reduce the on-off
frequency.
② Increase the
acceleration/deceleration.
time
③ Reduce the torque
limitation value.
④ Reduce the load inertia.
⑤ Replace the drive unit and
motor with high-power
ones.
Check the main power supply
Correct the motor pole-pairs
number of its corresponding
motor and power on again.
Check the main power supply.
Check the main power supply.
56
17
Parameter
auto setting
failure alarm
Occurs
during servo
parameter
auto setting.
Parameter values after auto
setting are invalid or the
setting failed.
①Perform parameter auto
setting after power on again.
②Adjust the parameter
manually.
Page 68

Continued:
18
Invalid
motor type
Chapter 5 Alarm and Troubleshooting
①Motor types are not written
① Motor types are not
written to the EEPROM of
the absolute encoder.
② Motor type codes are not
read when power on.
to the absolute encoder
when motor is out of factory
or the written motor types
are 0.
②Check whether the encoder
cable is connected.
19
Encoder
disconnecti
on alarm
The encoder cable is
disconnected or damaged.
Connect the encoder cable;
replace the encoder cable.
① Replace the servo drive
unit.
② Reset the drive unit type
with parameter No.1 after
20
EEPROM
error
Damaged chip or circuit
board
troubleshooting, and then
restore the default
parameters.
Occurs
immediately
Gsk-link initiation failed,
DSP reading FPGA failed,
① Replace the servo drive
FPGA works abnormally or a
wrong program is
② Replug the network cable.
downloaded.
unit.
22
Gsk-link
initialization
failure alarm
after being
connected
to power
supply or
during
motor
running
57
Page 69

DAH01, DAH2075E AC Servo Drive Unit User Manual
CHAPTER 6 DISPLAY AND OPERATION
6.1 Keyboard Operation
z The driver panel consists of 6-LED digital tube display and 4 keys , used for
displaying various system states and setting parameters, etc. The functions of the keys are as
follows:
: Sequence number, numerical value increment or forward selection
: Sequence number, numerical number decrement or backward selection
: Back to upper operation menu or cancel the operation.
: Enter into next operation menu or confirm the operation.
Note: keep pressing
holding time is, the faster the repetitive speed is.
z The 6-bit LED digital tube displays various states and data of the system, flashing of all digital
tubes means alarm.
z Performance is executed among multi-layer operating menus. The first layer is the main menu
including 8 operating modes and the second is the functional menu for each operating mode.
Fig.6-1 is the operating frame of the main menu:
or , the operation is performed repetitively. The longer the
58
Fig. 6-1 Operating frame of mode selection
Page 70

Chapter 6 Display and Operation
t
(p
)
6.2 Monitoring Mode
Select “dP-“in the first layer, then press to enter the monitoring mode. Use and to
select a desired display mode, and then press
states in total).
dP— SPd
dP— PoS
dP—PoS.
dP—CPo
dP—CPo.
dP— EPo
dP—EPo.
dP—trq
dP— I
dP— LSP
dP—Cnt
dP—Frq
dP—CS
Motor speed(r/min)
Current position low order4digits
Current position high order 4 digits(×10000pulses)
Position command low order 4 digits(pulse)
Position command high order 4 digits (×10000 pulses)
Position deviation low order 4 digits (pulse)
Position deviation high order 4 digits (×10000 pulses)
Motor torque (﹪)
Motor current (A)
Straight-line speed (m/min)
Current control mode
Position command pulse frequency(kHz)
Speed command(r/min)
to enter specific display states (21 kinds of display
ulse
r 1000
P 5806
Motor speed 1000r/min
Current position 125806 pulses
P. 12
C 5810
Position command 125810 pulses
C. 12
E 4
Position deviation 4 pulses
E. 0
t 70
I 2.3
L 5.000
Cnt 0
F 12.6
r. -35
Motor torque 70﹪
Motor current 2.3 A
Straight-line speed 5.000m/min
Control mode 0
Position command pulse
frequency 12.6 kHz
Speed command -35r/min
Speed command -35r/min
dP— Ct
dP—APo
dP—In
dP— oUt
dP— Cod
dP—rn
dP—Err
dP— USd
Torque command(﹪)
)
Absolute position value of rotor in one revolution
Input terminal state
Output terminal state
Encoder input signal
Running state
Alarm code
Analog command voltage
t -20
A13265
In
oU
Cod 0
Rn- on
Err-9
U 0.005
Torque command -20%
Rotor absolute position
value of 13265
Input terminal
Output terminal
Encoder signal
Running state: running
Alarm No. 9
Voltage value of analog
command
Fig.6-2 Operating frame of monitoring mode
Note 1: Position pulse value and command pulse value are the magnified ones after the electronic gear is
input.
Note 2: The pulse unit is the internal pulse unit that is 131072 pulses/rev in this system. The magnitude for the
pulse is described by high order 4 digits plus low order 4 digits and the calculation method is as
follows: Pulse=high order 4-digit numerical value×10,000+low order 4-digit numerical value
Note 3: Control mode
zeroing; 5-open loop operation.
Note 4: If the display number reaches 6 digits (e.g., -12345), no more prompt character will be displayed.
:0-position control;1-speed control;2-speed trial run; 3- run in JOG mode; 4-encoder
59
Page 71

DAH01, DAH2075E AC Servo Drive Unit User Manual
)
Note 5: Pulse frequency of the position command is the actual one before being magnified by inputting the
electronic gear and its min. unit is 0.1 kHz, with positive number for positive direction and negative
number for negative direction.
Note 6: The calculation method of the motor current I is as follows:
2
3
Note 7: The absolute position of a rotor in one revolution means the one relative to a stator. One rev is one
cycle, and its range is 0~9999.
Note 8: input terminal display is shown in figure 6-3, and output terminal display is shown in figure 6-4.
222
)(
IIII ++=
WVU
INH(command pulse prohibition)
SC2(speed selection 2)
CLE(deviation counter zeroing)
FIL(CCW torque limit)
RIL(CW torque limit)
SC1(speed selection 1)
RSTP(CW drive prohibition)
FSTP(CCW drive prohhibition)
ALRS(alarm clearing)
SON(servo
enabling)
Fig. 6-3 Input terminal display (light is ON and poor light is OFF)
COIN(positioning completion)
reserved
SCMP(speed arrival)
ALM(servo alarm)
SRDY(servo ready
Fig. 6-4 Input terminal display (light is ON and poor light is OFF)
Note 9: running state:
“rn- oFF”
“rn- CH”
“rn- on”
Note 10: only four digits are displayable for straight-line speed.
Note 11: “Err --” means the system is normal and no alarm occurs.
:The main circuit has not been charged and the servo system does not run.
:The main circuit has been charged and the servo system does not run (the servo is not
enabled or an alarm occurs);
:The main circuit has been charged and the servo system is running.
60
Page 72

6.3 Parameter Setting
Note
Chapter 6 Display and Operation
Select “PA-”in the first layer, and press
select a parameter number, press
modify the value; press
or to increase or decrease the parameter continuously. When the value of a parameter is
being modified, the decimal point of the leftmost LED digital tube is lighting. When the modified value
is confirmed by pressing
control immediately. After that, press
modification completed, press
is not the desired one, press
will restore to its previous value and backs to the parameter selection state.
PA— 0
PA— 1
or once to increase or decrease the parameter by 1; press and hold
, the decimal point goes out and the modified value is reflected to the
Parameter No. 0
Parameter No.1
to display the value of the parameter, then use and to
to return to parameter selection state. If the value being modified
to cancel it instead of pressing to confirm it, then the parameter
to enter parameter setting mode. Use and to
or to continue the parameter modification. With the
PA— 98
PA— 99
Parameter No. 98
Parameter No. 99
Fig. 6-6 Operation frame of parameter setting
. 1000
6.4 Parameter Management
Parameter management mainly processes the operation between memory and EEPROM. Select
“EE-”in the first layer, and press
mode (6 modes in total) firstly by
then press
will display “FInISH”, if not, display “Error”. Press
EE - SEt parameter writing. It means writing the parameters in memory to the
and hold it for more than 3 seconds. If the writing operation is successful, the screen
to enter into parameter management mode. Select an operation
and . Take Parameter Writing for example: select “EE-Set”,
again to return to operation selection mode.
61
Page 73

DAH01, DAH2075E AC Servo Drive Unit User Manual
parameter area of EEPROM. User’s modification for parameters only changes the
parameter values in the memory so that the values will be restored to previous ones after
power-on again. If the parameter values need to be changed permanently, perform
parameter writing operation, then the parameters in memory are written to EEPROM
parameter area and the modified parameters are valid after power on again.
EE-rd parameter reading. It means reading the data in EEPROM parameter area to
the memory. This process is automatically executed once after power on. In the
beginning, the parameter values in the memory are the same as those in the EEPROMO
parameter area. If user modifies the parameters, their values in the memory will be
changed. When the modified parameter values are not the desired ones or the
parameters are disordered, execute parameter reading operation to re-read the data in
EEPROM parameter area to the memory, which restores the parameters to the ones on
startup.
EE-bA parameter backup. It means reading the parameters in the memory to EEPROM
backup area. EEPROM consists of parameter area and backup area and it can save two
sets of parameters. Its parameter area is used for system power-on, parameter reading
and writing while its backup area is used for parameter backup and backup restoration.
During parameter setting, if user is satisfied with one group of parameters needing
further modification, execute parameter backup operation to save the parameters to
EEPROM backup area, then modify the parameters again or end the modification. In this
way, if the effect becomes poor later, user can execute backup restoration operation to
re-read the parameters saved in the EEPROM backup area to the memory, and then
re-modify or end the modification. Besides, after setting parameters, user can execute
parameter writing and parameter reading to ensure the data in the parameter area and
backup area is the same, which prevents parameters from being modified by mistake;
user can also execute backup restoration operation to write the data in EEPROM backup
area to the memory and then execute parameter writing operation to write the memory
parameter to EEPROM parameter area.
EE-rS backup restoration. It means reading the data in EEPROM backup area to the
memory. Please note that the parameter writing is unavailable in this operation and the
data read into the memory after power on again is still the one in EEPROM backup area.
To use the parameters in the EEPROM backup area permanently, user needs to execute
another parameter writing operation.
EE-dEF default value restoration. It means reading all parameter default values
(factory values) to the memory and writing them into the EEPROM parameter area. The
default values are used after power on again. This operation can restore all parameters
to their factory states if the system works abnormally because of incorrect parameter
adjustment. Ensure the drive unit type (parameter No.1) is right when executing default
parameter restoration, for different drive unit types correspond to different default values.
EE-Cr writing drive unit types to encoders. It indicates that the drive unit types are
written to the EEPROM of encoders. This operation is for manufacturer rather than user
so that user’s operation is invalid.
62
Page 74

Chapter 6 Display and Operation
Fig. 6-7 Operating frame of parameter management
Fig. 6-8 Operating meaning of parameter management
6.5 Speed Trial Run
Select “Sr-” in the first layer, and press
run is “S” and the unit is r/min. Speed commands are input with keys and changed by
to enter speed trial mode. The prompt of speed trial
and in
63
Page 75

DAH01, DAH2075E AC Servo Drive Unit User Manual
speed control mode, and the motor runs at the specified speed. Press to increase speed and
press
when negative speed is displayed, the motor performs CCW rotation.
to decrease speed. When positive speed is displayed, the motor performs CW rotation;
S 800
Fig. 6-9 Operating frame of speed trial mode
6.6 JOG Operation
Select “Jr-” in the first layer, then press to enter JOG operation mode. The prompt of JOG
operation is “J” and the unit is r/min. The speed commands are input with keys in speed control mode.
In JOG operation, the motor runs at JOG speed when
remains unchanged at zero speed when the button is released. JOG speed is set by parameter No.
21.
is pressed and held while it stops and
J 120
Fig. 6-10 Operating frame of JOG operation
6.7 Motor Test
Select “oL” in the first layer, and press to enter motor test mode. Its prompt is “r”and the unit
is r/min. Position limit value is 268435456 pulses and the speed is set by parameter No.24 in position
control mode. In motor test mode, the motor runs at tested speed by keeping
stops and remains unchanged at zero speed by pressing
the enable and exit motor test mode.
for 2 seconds. Press to switch off
for 2 seconds,
6.8 User Shortcut Password
User shortcut password is used for selecting password quickly to modify corresponding
parameters. Select “PS-”in the first layer, then press
Select one password mode (three modes in total) firstly with
specific password values. Press
PS-UEr user password. The password is 315, which means the value of parameter No.
0 immediately turns to 315 in the operation. Corresponding parameters can be modified
after the user exits the operation and returns to the parameter setting mode.
PS-CFS control mode selection. The password value is 510, which means the value of
parameter No. 0 immediately turns to 510 in the operation. Corresponding parameters
can be modified after the user exits the operation and returns to the parameter setting
mode.
PS-tPE drive unit type selection. Its password is 385, which means the value of
to return to the state of password mode selection.
to enter user shortcut password mode.
and , then press again to enter
64
Page 76

Chapter 6 Display and Operation
parameter No. 0 immediately turns to 385 in the operation. Corresponding parameters
can be modified after the user exits the operation and returns to the parameter setting
mode.
6.9 Servo Parameter Auto Setting
The parameter auto setting newly developed by our company can identify system control models
accurately, and find out a group of optimal parameters for servo control automatically and quickly
according to different load inertia ratios. Compared with the manual setting for PID parameters, it
saves lots of time and energy and has strong adaptability. Its operation procedures are as follows:
① After power supply is connected correctly, the upper computer starts to send enable signal to
the servo drive unit and the signal remains enabled. When connecting the closed-loop system
(CNC), shield the alarm of system (CNC) position deviation.
② Select “Au”in the first layer, press and hold for 3 seconds to enter auto setting mode of
servo parameters. It is normal to see ±0.5 pitch oscillating back and forth on the machine at the
moment. If the auto setting succeeds, the screen will display “FInISH”. The changes of
parameter No.5 and No.6 can be checked by returning to “PA” with
is needed, repeat procedure 2. If the auto setting fails, the screen will display “Err-17” (i.e.,
alarm No.17).
③ After the successful parameter auto setting, the set parameters are saved to the E2PROM
storage location of the servo drive unit automatically and take effect immediately without power
on again; if the set parameters are not the optimal ones, operators can fine tune the values of
parameter No.5 and No.6. Please note that the parameters cannot be saved automatically at
the moment, so parameter management “EE-SET” needs to be performed to save them.
Refer to 6.4 for details.
. If another auto setting
6.10 Others
On-line adjustment for automatic gains is not provided currently, for it is under development.
Encoder zeroing function is for motor manufacturer, please do not use it.
Open-loop operation mode is for motor manufacturer, please do not use it.
65
Page 77

Note
DAH01, DAH2075E AC Servo Drive Unit User Manual
CHAPTER 7 RUN
7.1 Power Supply Connection
Refer to figure 7-1 for power supply connection. The connecting sequence is as follows:
1) Connect the power supply to the input terminal of the main circuit through an
electromagnetism contactor (R, S and T for three phases, R and S for single phase).
2) Switch on the power supply of control circuit at the same time as or before switching on the
one of main circuit. If only the power supply of the control circuit is switched on, the servo
ready signal (SRDY) is OFF.
3) After the power supply of the main circuit is switched on and delays for 1.5s, the servo ready
signal (SRDY) is ON. At this moment, the servo enable (SON) signal may be received. After
valid servo enable is detected, the drive unit output is valid, and the motor is excited and
running. When invalid servo enable is detected or an alarm occurs, the base electrode circuit
is switched off and the motor is in free state.
4) When the servo enable and power supply are switched on together, the base electrode
circuit will be switched on in about 1.5s.
5) Switching on and off the power supply frequently may damage the soft-starting circuit and
energy consumption brake circuit, so the on-off frequency should be less than 5 times per
hour or 30 times per day. If the drive motor unit and motor are overheated, 30-minute cooling
is needed before the power supply is switched on again after troubleshooting.
66
Page 78

Chapter 7 Run
Emergency stop
NFB
Three-phase
or single-
phase AC
220V
Noise
filter
24V
Fig. 7-1 wiring of power supply
Time sequence of power supply connection and alarm
Power supply of
control circuit
Servo alarm output
(ALM)
<1s
RA
MC
RAOFF
R
S
T
r
t
ALM
DG
Servo drive
ON
MC
MC
SK
Power supply of
main circuit
Servo ready output
(SRDY)
Servo enable
input(SON)
Servo motor
excitation
<1.5s
Response in
10ms
<10ms
<10ms
Fig. 7-2 Time sequence of power supply connection
Fig.7-3 Time sequence of alarm
67
Page 79

DAH01, DAH2075E AC Servo Drive Unit User Manual
7.2 Trial Run
1) Check before running
Check the following items before power on after installation and wiring:
z Whether the TB wiring of the power supply and reliable input voltage are correct
z Whether the power line and motor line are short circuited or grounded
z Whether the connection of encoder cables is correct.
z Whether the connection of the control signal terminal and the polarity as well as the size of
the power supply are correct.
z Whether the drive unit and motor are fixed tightly.
z Whether the motor shaft is connected to the load.
2) Trial run after power on
(1) Trial run mode
① Connect to CN1 to make servo enable (SON) OFF, CCW drive prohibition (FSTP) ON
and CW drive prohibition (RSTP) ON.
② Please check the wiring if an alarm occurs after the power supply of the control circuit
(no connection for main circuit) is connected and the display of the drive unit is switched
on.
③ Set the control mode selection (parameter No.4) to the speed trial run mode (set to 2).
④ Switch on the power supply of the main circuit.
⑤ After confirming that no alarm or abnormality occurs, make the servo enable (SON) ON.
Then the motor is excited and in zero seed state.
⑥ Press keys to enter speed trial mode. Its prompt is “S“and the unit is r/min. When the
system is in speed control mode, speed commands are input by keys. Press
and
to change the commands, then the motor runs at the specified speed.
(2) JOG run
① Connect to CN1 to make servo enable (SON) OFF, CCW drive prohibition (FSTP) ON
and CW drive prohibition (RSTP) ON.
② Please check the wiring if an alarm occurs after the power supply of control circuit (no
connection for main circuit) is connected and the display of the drive unit is switched on.
③ Set the control mode selection (parameter No.4) to JOG mode (set to 3).
④ Switch on the power supply of main circuit.
⑤ If there is no alarm or abnormality, make the servo enable (SON) ON. Then the motor is
excited and in zero seed state.
⑥ Press keys to enter JOG run mode. The prompt and unit of the mode are “J” and r/min
respectively. When the system is in the speed control mode, the speed and direction are
decided by parameter No. 21. Press
direction decided by No.21, while press
to make the motor run at the speed and in the
to make the motor run in negative direction at
specified speed.
(3)Position control mode operation
① Connect to CN1 to make servo enable (SON) OFF, CCW drive prohibition (FSTP) ON
and CW drive prohibition (RSTP) ON.
② Please check the wiring if an alarm occurs after the power supply of control circuit (no
connection for main circuit) is connected and the display of drive unit is switched on.
③ Set the control mode selection (parameter No.4) to position running mode (set to 0). Set
68
Page 80

Chapter 7 Run
parameter No.14 and electronic gear ratio (No.12,No.13)according to controller output
signal mode.
④ Switch on the power supply of the main circuit.
⑤ If there is no alarm or abnormality, make the servo enable (SON) ON. At this moment,
the motor is excited and in zero-speed state.
⑥ Operate the position controller to output signals to drive pins CN1-6, CN1-18, CN1-7 and
CN1-19, making the motor runs according to commands.
(4)Speed control mode operation
The speed operation mode consists of the speed control of external analog voltage and the
speed control of internal speed.
Speed control mode of external analog voltage:
① Connect to CN1 to make servo enable (SON) ON, CCW drive prohibition (FSTP) ON, CW
drive prohibition (RSTP) ON.
② Please check the wiring if an alarm occurs after the power supply of the control circuit (no
connection for main circuit) is connected and the display of the drive unit is switched on.
③ Set the control mode selection (parameter No.4) to the speed running mode (set to 1), and
set parameter No. 43 to 1.
④ Switch on the power supply of the main circuit.
⑤ If there is no alarm or abnormality, make the servo enable (SON) ON. At this moment, the
motor is excited and in the running state that the speed is controlled by the external analog
voltage.
Analog speed zeroing: 1) Set PA49 to 1;
2) Shift the display to”DP-SPD”;
3) Observe the current speed: If the direction is clockwise, adjust
the value of PA44 to a bigger one; if the direction is
counterclockwise, adjust the value to a smaller one till the speed
is displayed as”R-0”.
4) Set parameter No.49 to 0;
5) Shift the display to”DP-POS”;
6) Observe the current position: if it is increasing, adjust the value of
PA45 to a bigger one, if it is decreasing, adjust the value to a
smaller one till the position value is stable.
⑥ Chang the external analog voltage to change the motor speed, and change the direction of
the analog voltage to change the rotation direction of the motor
Note: In speed control mode, even if the analog command voltage sends 0V command, the motor will still
rotates at very low speed. At this moment, it needs to adjust the amplifier zero.
Two kinds of internal speed control:
① Connect CN1 to make servo enable (SON) OFF, speed selection (SC1) OFF, speed selection
2 (SC2) OFF, CCW drive prohibition (FSTP) ON and CW drive prohibition (RSTP) ON.
② Please check the wiring if an alarm occurs after the power supply of the control circuit (no
connection for main circuit) is connected and the display of the drive unit is switched on.
69
Page 81

DAH01, DAH2075E AC Servo Drive Unit User Manual
③Set the control mode selection (parameter No.4) to the speed running mode (set to 1), and set
parameter No. 43 to 0. In addition, set speed parameter No.24~No.27as needed.
④ Switch on the power supply of the main circuit.
⑤If there is no alarm or abnormality, make servo enable (SON) ON. At this moment, the motor is
excited and runs at internal speed 1.
⑥Change the state of input signals SC1 and SC2 to make the motor run at the specified speed.
7.3 Adjustment
Note
1)Basic gain adjustment
(1)Speed control
① The setting value of [speed proportional gain] (parameter No. 5): the value should be set as
big as possible under the condition of no vibration. In general, the bigger the load inertia is,
the bigger the value is.
②The setting value of [speed integration time constant] (parameter No.6): the value should be
as small as possible according to given conditions. If the value is too small, the response
speed will increase, but vibration will occur too. Therefore, set the value as small as
possible under the condition of no vibration. If the value is too big, the speed may change
significantly with the load.
(2)Position control
① Set proper [speed proportion gain] and [speed integration time constant] following the above
methods.
② Set [position feedforward gain] (parameter No. 10) to 0%.
③The setting value of [position proportion gain] (parameter No.9): the value should be set as big
as possible within a stable range. A too big value leads to good track characteristics of
position commands and small lag error, but also causes vibration easily when the positioning
is stopped.
④Increase the setting value of [position feedforward gain] if particularly high position track
characteristics are needed, but an extremely big value will cause overshoot.
Note: a small setting value of the position proportion gain leads to a stable state for the system, but also
causes bad position track and big lag error.
70
Page 82

2)Basic parameter adjustment
Δ
t
Δ
r
p
p
g
N
N
N
N
N
N
N
N
N
N
N
N
N
low-pass
filte
o.9
proportion gain
Position
command
selection
Position
command
Internal speed command
o.14
input form
Pulse
gear
o.12
o.13
Electronic
Feedforward
gain
Feedforward
o.4
Speed
o.39
o.40
celeration time
Acceleration/de
calculation
Speed
o.5
o.6
constant of speed
Integration time
proportion gain
o.64
low-pass filter
Chapter 7 Run
o.60
o.61
Current command
ro
ortion
ain
Integration time
constant of
current
M
RS485
communication
External analog
o.47
command
gain
Analog
speed
voltage
Fig. 7-4 Adjustment for basic parameter
3) Setting for position resolution and electronic gear
Position resolution (one pulse travel l)
△ is decided by travel S per revolution of △ the servo
motor and feedback pulse Pt per revolution of the encoder. It can be expressed as follows:
S
l=
△
Pt
In the expression,
△ :one pulse travel(mm);
l
△ :travel per revolution of the servo motor(mm/r) ;
S
Pt:feedback pulse number per revolution of the encoder(p/r).
Pt=131072p/r due to the servo motor with a17-bit absolute encoder.
Command pulse converts to position control pulse by multiplying electronic gear ration G, so
one command pulse travel l
△ ﹡is expressed as follows:
PG
l*=
S
×G
△
P
oron numeratncy divisilse frequecommand pu
In the expression,
G=
atorminon denoncy divisilse frequecommand pu
71
Page 83

DAH01, DAH2075E AC Servo Drive Unit User Manual
CHAPTER 8 PRODUCT SPECIFICATION
The servo drive unit shall be purchased with its matching servo motor. This
Attentions
8.1 Specifications of Drive Unit
Adaptive motor capacity
manual introduces the conditions that GSK SJT series motors are matched.
Please note on the order if you want to use servomotors of other manufacturers.
Table 8-1 Specifications of DAH series servo drive unit
0.1kW~6kW
Input power
supply
Control mode Three-phase full-wave rectification IGBT
Feedback mode 17-bit absolute encoder
Working
environment
vibration/impact resistance
Speed
control mode
Scope of speed control (base on the
condition that locked rotor is not
happened at rated load)
Speed change rate
Main circuit Single-phase or three- phase AC
(0.85~1.1)×220V 50Hz/60Hz
Control loop
Temperature
Humidity
Single-phase AC(0.85~1.1)×220V
50Hz/60Hz
PWM sine-wave driving
Operation temperature: 0
Storage temperature:-40
Less than 90%(No dewing)
Less than 0.5G(4.9m/s
(Discontinuous movement)
1: 60000
0~100% Load:±0.01﹪
Rated voltage ±10%:±0.01﹪
℃~+40 ℃
℃~+70 ℃
2
)/10Hz~60Hz
Position
control mode
72
Speed frequency response ≥200Hz
Acceleration and deceleration time
External speed command input ±10V input voltage
Internal speed setting function 4 kinds of speed can be set inside
Input impedance 20kΩ
Max. pulse input frequency
Type of input pulse 1. Direction + Pulse 2.CCW+CW pulse
series 3.90° pulse difference two-phase
pulse. Any of them can be selected.
Form of input pulse 1. Differential input 2. Open collector input
Electronic gear ratio 1< α/β <32767
0~6.5536M(Hz)
0~10s
Page 84

I/O Signal
Chapter 8 Product Specifications
Position signal output 1. A phase, B phase, Z phase differential
output. 2. Open collector output Z phase
Control input
signal
Control output
signal
Servo enable Alarm clearing ①② ③CCW drive prohibition
CW drive prohibition Deviation counter clearing/speed ④⑤
selection 1 Command pulse prohibition/speed selection 2 ⑥⑦
Zero speed clamping
Servo ready output Servo alarm output Positioning finish ①②③
output/speed arrival output Brake output④
Inside Communicatio
n function
Functions
High
performance
functions
Regenerative
braking
Frequency
dividing output
of encoder
signals
Protection
function
Monitoring
function
Display,
Operation
GSK-LINK communication mode.
Max. connection number:254 axes
Data transmission rate: 100Mbit/s
1. A high resolution encoder is used to get more stable
performance. Stable mechanical performance is realized.
2. A16-bit high-precision A/D conversion chip is adopted to
achieve high-precision closed loop control. The number of
feedback pulse can be adjusted freely. (≤32768).
3. Motor type automatic recognition function.
4. In the bus communication mode, the servo parameters
upload and download online, servo diagnostic information
feedback and servo alarm monitoring can be realized.
5. In bus communication mode, the functions that work piece
coordinate system power-off memory and no stroke switch
zero return can be realized.
6. Control model identification and parameter auto-setting
function.
Built-in
Adjustable frequency division
Pulse output: 16~32768(pulse/rev)
Over speed, main power source overvoltage, power module
fault, under voltage, over current, over load, over heating,
braking abnormal, encoder abnormal, encoder communication
fault, invalid motor type setting, control power source abnormal,
position deviation, etc.
Motor speed, pulse number of the current position, pulse
number of position command, position deviation, motor torque,
motor current, linear speed, absolute position of the rotor, pulse
frequency of the command, operation state, input/output
terminal signal, current given voltage, etc.
6-digit LED, 4 buttons
73
Page 85

DAH01, DAH2075E AC Servo Drive Unit User Manual
8.2 Servo Motor Specification
1) Product introduction
GSK SJT series 3-phase AC permanent magnet synchronous motor has the following
technical characteristics:
New
◆ -type rare earth is used, output power is big.
The motor with well low
◆ -speed characteristic, speed regulation ratio >1:10000.
Dielectric strength and insulation resistance are high and safe.
◆
◆ Strong overload capacity, instantaneous torque is about 8 times the value of the rated
torque.
2) Terminal instruction
(1) SJT series motor winding
3-phase winding U, V, W of the motor and earth wire of the motor shell are led out by a
4-core plug-in connector. See table 1 for its corresponding relationships. U, V, W and
earth wire of the motor shell are respectively connected to terminals U, V, W and PE of
drive unit main circuit.
U
Motor wire U V W
W V
Plug No. 2 3 4 1
The wire of photoelectric encoder is led out through a 15-core plug-in connector. See 8-3
for its corresponding relationships. The led out wires are connected to the plug of drive unit
feedback signal CN2 according to requirements of the drive unit.
Table 8-2 Motor wiring table
Shell
(earth wire)
1
3
2
4
Contact(weld point)
diagram
Table 8-3 Encoder wiring table
Shell
Encoder wire
(earth wire)
SD
GND VCC SD
Plug No. 1 2 3 4 5 6 7 8
Encoder wire VB
Plug No. 9 10 11 12 13 14 15
74
Page 86

3) Servo motor technical specifications
Table 8-4 Specifications of SJT series motor with absolute encoder
Chapter 8 Product Specifications
Type
Powe
r(kW)
Pole-
pairs
Zero-speed
torque
(N.m)
Rated
rotary
speed
(r/min)
Rated
current
(A)
Rotor
inertial
(kg.m
Working voltage
2
)
(unit:V)
80SJT-M024C(A4) 0.5 4 2.4 2000 3 0.83×10-4 AC 3-phase 220
80SJT-M024E(A4) 0.75 4 2.4 3000 4.8 0.83×10-4 AC 3-phase 220
80SJT-M032C(A4) 0.66 4 3.2 2000 5 1.23×10-4 AC 3-phase 220
80SJT-M032E(A4) 1.0 4 3.2 3000 6.2 1.23×10-4 AC 3-phase 220
110SJT-M040D(A4) 1.0 4 4 2500 4.5 6.8×10-4 AC 3-phase 220
110SJT-M060D(A4) 1.5 4 6 2500 7.0 9.5×10-4 AC 3-phase 220
130SJT-M040D(A4) 1.0 4 4 2500 4.0 1.19×10-3 AC 3-phase 220
130SJT-M050D(A4) 1.3
4
5 2500 5.0 1.19×10-3 AC 3-phase 220
130SJT-M060D(A4) 1.5 4 6 2500 6.0 1.95×10-3 AC 3-phase 220
130SJT-M075D(A4) 1.88 4 7.5 2500 7.5 1.95×10-3 AC 3-phase 220
130SJT-M100B(A4) 1.5 4 10 1500 6.0 2.42×10-3 AC 3-phase 220
130SJT-M100D(A4) 2.5 4 10 2500 10.0 2.42×10-3 AC 3-phase 220
130SJT-M150B(A4) 2.3 4 15 1500 8.5 3.1×10-3 AC 3-phase 220
130SJT-M150D(A4) 3.9 4 15 2500 14 3.6×10-3 AC 3-phase 220
175SJT-M180B(A4) 2.8 3 18 1500 15 6.5×10-3 AC 3-phase 220
175SJT-M180D(A4) 3.8 3 18 2500 16.5 6.5×10-3 AC 3-phase 220
175SJT-M220B(A4) 3.5 3 22 1500 17.5 9×10-3 AC 3-phase 220
175SJT-M220D(A4) 4.5 3 22 2500 19 9×10-3 AC 3-phase 220
175SJT-M300B(A4) 3.8 3 30 1500 24 11.2×10-3 AC 3-phase 220
175SJT-M300D(A4) 6 3 30 2500 27.5 11.2×10-3 AC 3-phase 220
Note 1: Please mark on the order if you order a motor with power-off brake.
Note 2: In the above table, the number in the brackets of the rated current column is the rated current of high
voltage.
75
Page 87

DAH01, DAH2075E AC Servo Drive Unit User Manual
3) Overall size
(1) Contour and installation size of 80SJT series AC servo motor
Industry (aviation)
Socket type
Cable type
Type D(mm) N(mm) LB(mm) L(mm)
80SJT—M024C(A4)
80SJT—M024E(A4)
80SJT—M032C(A4)
80SJT—M032E(A4)
φ19
φ19
φ19
φ19
0
-0.013
0
-0.013
0
-0.013
0
-0.013
φ70
φ70
φ70
φ70
0
163 198
-0.03
0
163 198
-0.03
0
181 216
-0.03
0
181 216
-0.03
76
Page 88

Chapter 8 Product Specifications
(2) Contour and installation size of 110SJT series AC servo motor
Type D(mm) N(mm) LB(mm) L(mm)
110SJT—M040D(A4)
110SJT—M040E(A4)
110SJT—M060D(A4)
110SJT—M060E(A4)
φ19
φ19
φ19
φ19
0
-0.013
0
-0.013
0
-0.013
0
-0.013
Note:LB and L in brackets are the length of the corresponding motor with power-off brake.
φ95
φ95
φ95
φ95
0
186 (237) 241 (292)
-0.035
0
186 (237) 241 (292)
-0.035
0
212 (263) 267 (318)
-0.035
0
212 (263) 267 (318)
-0.035
(3) Contour and installation size of 130SJT series AC servo motor
Type D(mm) N(mm) LB(mm) L(mm)
0
130SJT—M040D(A4)
130SJT—M050D(A4)
130SJT—M060D(A4)
130SJT—M075D(A4)
130SJT—M100B(A4)
130SJT—M100D(A4)
130SJT—M150B(A4)
130SJT—M150D(A4)
φ22
φ22
φ22
φ22
φ22
φ22
φ22
φ22
-0.013
0
-0.013
0
-0.013
0
-0.013
0
-0.013
0
-0.013
0
-0.013
0
-0.013
Note:LB and L in brackets are the length of the corresponding motor with power-off brake.
φ110
φ110
φ110
φ110
φ110
φ110
φ110
φ110
0
-0.035
0
-0.035
0
-0.035
0
-0.035
0
-0.035
0
-0.035
0
-0.035
0
-0.035
168 (227) 225 (284)
168 (227) 225 (284)
176 (235) 233 (292)
188 (247) 245 (304)
208 (267) 265 (324)
208 (267) 265 (324)
238 (297) 295 (354)
248 (307) 305 (364)
77
Page 89

DAH01, DAH2075E AC Servo Drive Unit User Manual
(4) Contour and installation size of 175SJT series AC servo motor
Type D(mm) N(mm) LB(mm) L(mm)
175SJT—M150D(A4)
175SJT—M180B(A4)
175SJT—M180D(A4)
175SJT—M220B(A4)
175SJT—M220D(A4)
175SJT—M300B(A4)
175SJT—M300D(A4)
Note:LB and L in brackets are the length of the corresponding motor with power-off brake.
φ35
φ35
φ35
φ35
φ35
φ35
φ35
+0.01
0
+0.01
0
+0.01
0
+0.01
0
+0.01
0
+0.01
0
+0.01
0
φ114.3
φ114.3
φ114.3
φ114.3
φ114.3
φ114.3
φ114.3
0
-0.025
0
-0.025
0
-0.025
0
-0.025
0
-0.025
0
-0.025
0
-0.025
224 (291) 303 (370)
244 (311) 323 (390)
244 (311) 323 (390)
279 (346) 358 (425)
279 (346) 358 (425)
309 (382) 388 (461)
309 (382) 388 (461)
8.3 Isolation Transformer
It is recommended that isolation transformer supplies power to drive unit to
Note
Our company provides the following types of isolation transformers for user selection. User
shall select it according to the power and actual load factor of the servo motor.
78
reduce the possibilities of electric shock and interference from power or
electromagnetic field.
0.8 kW and the below drive unit adopt single -phase power supply, and the
ones above 0.8 kW shall adopt three-phase power supply.
Page 90

Table 8-5 Specifications of the isolation transformer
Type
Capacity(kVA)
BS—120 1.2
BS—200 2.0
Three-phase
BS—300 3.0
BS—400 4.0
Chapter 8 Product Specifications
Phase Input voltage(V) Output voltage(V)
380 220
BD—80 0.8
Single-phase
BD—120 1.2
Fig.8-8 Exterior and installation dimension of BS—120
Fig.8-9 Exterior and installation dimension of BS—200
79
Page 91

DAH01, DAH2075E AC Servo Drive Unit User Manual
Fig. 8-10 Exterior and installation dimension of BS—300
80
Fig.8-11 Exterior and installation dimension of BS—400
Page 92

Chapter 8 Product Specifications
Fig. 8-12 Exterior and installation dimension of BD—80
Fig.8-13 Exterior and installation dimension of BD—120
81
Page 93

DAH01, DAH2075E AC Servo Drive Unit User Manual
Chapter 9 ORDER INSTRUCTION
9.1 Capacity Selection
Determination of the drive unit capacity shall base on an overall consideration of the following
factors: load inertia, load torque, required positioning accuracy and required maximum speed. Take
the following steps into consideration before determining the capacity:
1) Load inertia and torque calculation
T
system.
2πM = FL
M ── Motor shaft torque
F ── Required force to move the mechanical parts in a straight line
L ── Moved distance of the machine when the motor rotates once(2πrad)
① orque calculation Load torque is caused by the friction and cutting force of the drive
2πM is the work of motor when the motor rotates once with torque M. FL is mechanical
work when L (distance) is moved by force F. On machine tool, because the factors of
transmission efficiency and friction coefficient exist, required torque for ballscrew to do
uniform motion by overcoming the external load P is as follows:
Calculation formulas:
h
M
K
F
C
+
P
2
πη
sp
+MB)
1
maz ,
a0
F
h
=(K
M
1
—— Driving torque during uniform movement(N•mm);
1
F
0 spa
2
—— Pre-tightening force (N), generally , pre-tightening force is 1/3 of max. axial
a0
0 spa
π
2
h
—— Pre-tightening torque of double nut ball screw(N•mm);
π
work load F
the formula F
—— Rated load of ball screw pair, which can be found in product samples
a
Z
1
Z
2
that is to say, Fa0 =1/3F
maz.
When F
=(0.1~0.12)Ca (N) can be used.
is difficult to calculate,
maz
hsp —— Screw lead (mm);
K —— The scope of pretightening torque coefficient of ball screw is 0.1~0.2;
P —— External load (N)that is added to screw axial,P=F+μW;
82
Page 94

Chapter 9 Order Instruction
πγ
F —— Cutting force(N) acting on screw axial
W —— Normal load(N),W=W
W1 —— Movable parts gravity (N), including maximum bearing gravity;
P1 —— Clamping force of splint (such as spindle box);
μ —— Friction coefficient of lead rail, sliding lead rail pair with polyfluortetraethylene plate
μ=0.09. When lubricating is available, μ=0.03~0.05, linear sliding lead rail μ=
0.003~0.004;
η1 —— The scope of ball screw efficiency is 0.90~0.95;
MB —— Friction torque for supporting the bearing, which is also called starting torque, can
be found in special-purpose bearing samples of ball screw;
z
z
—— Teeth number of the gear 1;
1
—— Teeth number of the gear 2。
2
Finally, select servo motor according to the conditions satisfying the following formula: M
M in the formula is rotated torque of the servo motor.
②
Inertia matching calculation
Usually between motor inertia J
load inertia JL (convert to motor axis) or total inertia J
M,
following relationships are recommended:
Rotor inertia J
of the motor can be found in product sample or manual. Here is a brief
M
introduction to the method for calculating load inertia:
1. Inertia of rotary parts ball screw, shaft coupling, gear and notched belt pulley belong to
rotary parts.
1+P1
1
≤
4
;
J
L
≤ 1 or 0.5 ≤
J
M
J
M
≤ 0.8 or 0.2 ≤
J
r
1
J
L
J
r
≤ Ms
the
r,
≤ 0.5
J ⋅
=
32
g
×
γ —— Material density of rotary parts (kg•m
24
)(
mkgLD
2
);
D —— Diameter of rotary parts(cm);
L —— Length of rotary parts(cm);
2
g —— Acceleration of gravity,g=980cm/s
。
2、Inertia of linear motion objects
J=
W
L
(
g
2
)
(kg•m2)
π
2
W —— Gravity of linear motion objects(N);
L —— Moved distance (cm) of objects when the motor rotates
once. If the motor is directly connected to the screw, and L is
equal to the screw lead.
83
Page 95

DAH01, DAH2075E AC Servo Drive Unit User Manual
π
3. Inertia that is converted to motor shaft during the decelerate transmission. Inertia that is
converted to motor shaft during gear and notched belt transmission deceleration.
z
1
J=J
(
0
)
z
2
2
Please refer to the chart for load inertia calculation. The load inertia J
motor shaft is:
z
J
J
J
J
③ maximum torque during positioning acceleration
Calculation of the
+(
L=JG1
—— Inertia of the gear 1 (kg•m2);
G1
——Inertia of the gear 2 (kg•m2);
G2
—— Inertia of the ball screw (kg•m2)。
S
2
M =
1
)2[(JG2+JS)+
z
2
m
(JM+JL)+M
tn60
a
nm —— Rotate speed of the fast-moving motor(r /min)
t
—— Acceleration/deceleration time(s),According to ta ≈3 /KS,choose
a
150 ms~200ms
K
M
—— The scope of system open-loop gain is 8s-1~25s-1. Usually
S
choose K
—— Load torque (N•m)
L
S
2) Preliminarily define the mechanical gear ratio
Maximum mechanical reduction ratio can be calculated by required maximum speed and
maximum motor speed. Use the reduction ratio and minimum revolving unit to calculate
whether the requirements of minimum position unit can be satisfied. If it requires high
position accuracy, increase mechanical reduction ratio (actual maximum speed decreases)
or select motor with faster rotate speed.
3) Calculation of inertia and torque
Convert load inertia and load torque to motor shaft by using mechanical reduction ratio.
Converted inertia should be no greater than 5 times of motor rotor inertia. Converted load
torque and effective torque should be no greater than motor rated torque. If it does not
meet the above demands, increase mechanical reduction ratio (actual maximum speed
decreases) or select motor with larger capacities.
W
L
L
(
g
)2] (kg•m2)
π
2
= 20s-1 for machining center
converted to
L
9.2 Electronic gear ratio
For significances of electronic gear ratio, adjustment methods, please refer to chapter 4 (table
4-2 parameter function), chapter 6 (6.3 parameter setting), chapter 7 (7.3 adjustment).
In position control mode, actual load speed is:
Instruction pulse speed ×G ×mechanical reduction ratio
84
Page 96

Chapter 9 Order Instruction
Z
T
δ
In position control mode, actual minimum displacement of load is:
Minimum instruction pulse stroke ×G ×mechanical reduction ratio
Note: When the electronic gear ratio is not equal to 1, there may be a remainder in gear ratio division.
Meanwhile, position deviation may exist, and the maximum deviation is the minimum rotating amount
of the motor (the minimum resolution ratio).
9.3 Stop characteristcs
In position control mode, when the servo motor is controlled by pulse train, there is a difference
between instruction pulse and feedback pulse, this difference is called lag pulse. This value is
accumulated in position deviation counter, of which the relationship to pulse frequency, electronic
gear ratio and position percentage gain is as follows:
*
ε=
In the formula:
ε:Lag pulse(Puls);
f: Instruction pulse frequency(Hz);
Kp:Position percentage gain(1/S);
G: Electronic gear ratio
Note: The above relationship is established under the condition that [Position feed forward gain] = 0%. If
[Position feed forward gain] >0%, the lag pulse will be smaller than the value calculated by the above
formula.
K
Gf ×
p
9.4 Calculation methods of servo drive unit and position controller
selection
1)Instructed displacement and actual displacement
DR
S
In the formula,
I:Instructed displacement mm;
δ:CNC minimum unit mm;
CR:Frequency multiplier factor of the instruction;
CD:Instruction frequency dividing coefficient
DD:Servo frequency dividing coefficient;
ST:Index number when servo motor rotates once;
ZD:Teeth number of motor side gears;
ZM:Teeth number of screw side gears;
L: Screw pitch mm
Usually, S=I, instructed value is equal to the actual value.
2)CNC maximum instruction speed
CRI
DD
CD
S:Actual displacement mm;
DR:Servo multiplier factor;
ZD
1
S
M
L
⋅⋅⋅⋅⋅=
CRF
60
δ
CD
×
f
≤⋅
max
85
Page 97

DAH01, DAH2075E AC Servo Drive Unit User Manual
F in the formula is instruction speed mm/min;
f
:CNC maximum output frequency Hz(128000 for GSK980)
max
3)Maximum speed of servo drive unit
DR
max
max
×n=V
In the formula, V
n
Actual maximum speed of the machine tool is restricted by maximum speed of CNC and servo unit.
4)Minimum movement of the machine tool
NINTINT=α
In the formula, α:Minimum movement of the machine tool mm;
N :Natural number;
INT( ):Round the number to the nearest integer;
NT [ ]
L×
DD
:Servo system maximum allowable speed (mm/min) for working table;
max
:Maximum allowable speed of servo motor (r/min);
max
ZD
min
1
ST
ZM
L
δ
CR
CD
DR
DD
: Minimum integer.
min
86
 Loading...
Loading...