

Page 1
DA98D Digital AC Servo Drive Unit
User Manual
(V5.00)
Page 2
In this User manual, we will exert ourselves to describe each item related
to operation of this drive unit. But due to reasons like limit in space and
specific product uses, detailed description of unnecessary or impossible
operation of this drive unit will be not included. Therefore, items that are
not specially indicated in this manual will all be regarded as “impossible”
or “disallowed” operations.
Copyright of this manual belongs to GSK Equipment Co., Ltd, and any
publication or copying of this manual by any unit or individual will be
deemed as illegal behaviors. GSK Equipment Co., Ltd shall reserve the
rights to ascertain legal liabilities of such behaviors.
1
Page 3

Company Profile
Currently, GSK Equipment Co., Ltd (hereafter GSK for short) is a China's
company with the domestically largest sale volumes of digital control systems.
As the digital control industry base in Southern China and one of the 20
manufacturers of key equipment in Guangzhou, GSK is an undertaker of key
projects listed in State 863 Supporting Technology for Middle-Grade Digital
Control Industrialization. For more than a decade, the company has been
dedicated to professional research & development, designing and
manufacturing of such products as digital control systems for machine tools,
digital control devices, drive units and servo motors. By launching campaign on
popularization of digital control machine tools and developing trade in digital
control machine tool, the company has developed into a large hi-tech company
that integrates science, education, industry and trade into itself. Currently the
company has more than 1,400 employees, among whom there are 4 doctors,
more than 50 masters and over 500 engineering technicians (more than 50
technicians with senior professional titles). With a superior cost performance,
GSK series of products have a very good sale in China and far in Southeastern
Asia. Between 2000 and 2006, its market share has ranked No.1 in China for 7
consecutive years and its yield and sale volumes have led the peers for 7
consecutive years, which have consolidated its position as the biggest
domestic production base of digital control system for machine tools.
Our main products include digital control equipment and devices like GSK
series of machine tools, milling machine and digital control system for
processing centers as well as Da98, DA98A, DA98B and DA98D series of full
digital AC servo drive units, DY3 series of hybrid stepper motor driver, DF3
series of reaction stepper motor driver, GSK·SJT series of AC servo motors
and CT-L digital control slipway. All the products follow state standards
(international standards), industry standards and supplementary company
standards (or internal control standards) in an all-round way. With powerful
strength in technology development and improved production and quality
assurance system, GSK has satisfied requirements of vast number of its
customers with stable and reliable product quality. Its improved and sound
II
Page 4

service mechanisms as well as the more than ten service offices set up in
domestic and foreign provinces and cities can guarantee swift and convenient
technical support and services within 24 to 48 hours. “Excellent products and
outstanding services” have built a brilliant GSK. Abiding by the operation
concept of “creating century-old company and molding gold brand”, GSK
people will make unrelenting efforts to build a digital control industry base in
Southern China and push forward national digital control industry.
Field Technical Support Services
If you have problems that cannot be resolved through phone calls, you can
receive our technical support on the spot. GSK will authorize technical support
engineer to the field to resolve your technical problems.
III
Page 5
Foreword
Foreword
Distinguished Customers,
It is a great honor for us to have you buy DA98D full digital AC servo drive units
of GSK Equipment Co., Ltd.
This manual will introduce requirements and notes about operation of DA98D
full digital AC servo drive unit.
! Improper operation will cause accidents, and the drive unit must be
operated by personnel with related qualifications
Please see to it that you have carefully read the manual prior to operation!
If there are changes to specifications and designs, we will not provide further
notices.
Sincere thanks to your friendly support for using products of GSK Equipment Co., Ltd.!
Chinese version of all technical documents in Chinese and English languages is
regarded as final.
IV
Page 6
Foreword
● Due to improvement in products, contents of this manual will have some changes, for
which we will not provide further notices.
● We will not be held accountable for any change made by the customer on the product
and the warranty form will hereby go invalid.
Please give special attention to the following warning sings when reading the manual!
Warning
Attention
Attention
Wrong operation may lead to disastrous consequences---death
or serious injury
Wrong operation may hurt the operator and the equipment may
also be damaged!
Improper operation may damage the product and equipment!
V
Page 7
Safety Warning
Safety Warning
● The product is not designed and manufactured to be used in machines or systems
threatening personal safety.
● When selecting the product, the customers shall consider safety protection measures when
designing and manufacturing their machines and systems, so as to avoid improper
operation or irregular accidents of the product.
Acceptance
● Damaged or broken-down products shall not be put into use.
Transportation
Warning
Attention
Attention
● Products must be stored and transported under conditions for storage and transportation.
● Over-height piling shall not be allowed to prevent products from falling.
● When being transferred, the products concerned shall be properly packed.
● The servo motor shall not be moved by drawing its wire, motor shaft or encoder.
● Outside force and impact shall not be imposed on servo drive units and servo motors.
Installment
Servo drive units and servo motors:
● Shall not be installed above or around combustible articles to prevent fire disaster.
● Shall avoid vibration. Impact shall be strictly forbidden.
● Shall not be installed when they are damaged or the parts are incomplete
Servo Drive unit:
● Must be installed in the control panel with sufficient degree of protection.
● Must keep sufficient intervals away from other equipment.
● Must have good conditions for heat emitting.
● Must prevent invasion of dust, corrosive air, conductive matters, liquid, combustible and
explosive substances.
Servo motors:
● Must be firmly installed to prevent loosening under vibration
● Must prevent motor and encoder from being damaged by the invaded liquids
● Shock on motor and motor shaft shall be strictly forbidden to prevent the encoder from
being damaged.
● Load surpassing its limit shall not be imposed on the motor shaft.
Attention
VI
Page 8
Safety Warning
Wiring
● Personnel involved in wiring or examination must possess sufficient competence in this
task.
● Wiring and examination must be conducted 5 minutes after the power is switched off.
● Servo drive units and servo motors must have good ground contact.
● Wrong voltage or electrode may cause explosion or operation accidents.
● Only after the servo drive unit and servo motor are properly installed can the wiring be
conducted.
● Ensure insulation of the wire and avoid pressing the wire to prevent electric shock.
● Wires must be connected in a correct and firm manner, otherwise, the servo motor may run
by error or the equipment may be damaged due to bad contact.
● Terminals of U, V and W in servo motor shall not be connected reversely, nor be connected
to AC power.
● Servo motor and servo drive unit must be directly connected and they shall not be
connected with capacitor, inductor or wave filter.
● Prevent conductive fastening elements and wire heads from entering in the servo drive unit.
● The wire and substances not resistant to heat shall not close up to the servo drive unit’s
radiator and servo motor.
● Continuous current diode connected in parallel to the DC relay for output signals shall not
be connected reversely.
Attention
Attention
Commissioning and Runing
Attention
● Confirm that the servo drive unit and servo motor have been properly and firmly installed
and that the power voltage and wiring are correct before switching on power.
● When commissioning, first run the servo motor without load; and after confirming that the
parameters are correctly set, run the servo motor with load. In this process, improper
operation shall be avoided to prevent the machine and equipment from being damaged.
Operation
● An emergency stop circuit shall be coupled in to ensure that the equipment can
immediately stop by timely switching off power in case of accidents.
● Confirm that the operation signal has been cut off before resetting an alarming signal;
otherwise, the signal will be restarted suddenly.
● Servo drive unit must be operated together with its matched set of servo motor.
● Do not frequently switch off or on power of the servo drive unit to prevent the system from
being damaged.
● The servo drive unit and servo motor may be very hot after long hours of operation, so do
Attention
Ⅶ
Page 9
Safety Warning
not touch the servo drive unit’s radiator or the servo motor with your hand within a short
time after the power is off.
● Do not refit the servo drive unit.
Failure Handling
● Even after the power of servo drive unit has been cut off, the voltage will remain for some
time. So do not dismantle the wire or touch the plate of terminals.
● Personnel involved in dismantlement and repair must possess corresponding professional
knowledge and working capacity.
● In case of alarming, the trouble must be shot. Before restarting the machine, the alarming
signal shall be reset.
● Keep away from the machine when re-switching on the power after instantaneous power
failure, for the machine may be restarted suddenly (when designing the machine, make
sure that there will be no danger when restarting the machine).
System Selecting and Matching
Attention
Attention
Attention
● Rated torque of the servo motor shall be greater than the valid continuous load torque.
● The ratio of load inertia to servo motor inertia shall be less than the recommended value.
● When selecting servo drive unit and servo motor, they shall be matched with each other.
Ⅷ
Page 10

DA98D User manual
Table of Contents
Chapter One Overview........................................................................................................1
1.1 Product Introduction.............................................................................................................. 1
1.2 Arrival Examination ................................................................................................................ 2
1.3 Product Appearance .............................................................................................................. 3
Chapter Two Installment.....................................................................................................6
2.1 Environmental Conditions.................................................................................................... 6
2.2 Installment of Servo Drive unit............................................................................................ 6
2.3 Installment of Servo Motor................................................................................................... 9
Chapter Three Wiring.........................................................................................................10
3.1 Standard Wiring..................................................................................................................... 10
3.2 Functions of Terminals........................................................................................................ 14
3.3 I/O Interface Principle .......................................................................................................... 19
Chapter Four Parameters.................................................................................................25
4.1 Checklist of Parameters...................................................................................................... 25
4.2 Functions of Parameters..................................................................................................... 27
4.3 List for comparison of Modle Codes & Parameters and Motor ................................ 34
Chapter Five Alarming and Handling............................................................................35
5.1 List of Alarms......................................................................................................................... 35
5.2 Methods for Handling Alarms............................................................................................ 36
Chapter Six Display and Operation ...............................................................................40
6.1 Keyboard Operation............................................................................................................. 40
6.2 Ways of Monitoring .............................................................................................................. 41
6.3 Parameter Setting ................................................................................................................. 43
6.4 Parameter Management ...................................................................................................... 44
6.5 Speed Trial Operation.......................................................................................................... 45
6.6 JOG Operation....................................................................................................................... 46
6.7 Others ......................................................................................................................................46
Chapter Seven Operation by Switching on Power....................................................47
7.1 Power Supply Connecting.................................................................................................. 47
7.2 Trial Operation....................................................................................................................... 49
7.3 Adjustment ............................................................................................................................. 51
Chapter Eight Product Specifications ..........................................................................53
8.1 Driver Specifications............................................................................................................ 53
8.2 Servo Motor Specifications................................................................................................ 54
8.3 Isolating Transformer .......................................................................................................... 59
1
Page 11

DA98D User manual
Chapter Nine Order Instructions....................................................................................65
9.1 Capacity Selecting................................................................................................................ 65
9.2 Electronic Gear Ratio........................................................................................................... 65
9.3 Stop Features......................................................................................................................... 66
9.4 Calculation Method for Selecting Models of Servo System and Position
Controller....................................................................................................................................... 66
2
Page 12
DA98D User Manual
Chapter One Overview
1.1 Product Introduction
The AC servo technology has undergone a rapid development since the beginning of 1990s,
during which period this technology has been increasingly mature and its performance has been
constantly improved. Now this technology has been widely applied to such automatic fields as
CNC machine tools, printing and packing machines, textile machinery and automatic production
lines.
DA98D AC servo drive unit (all called full digital AC servo drive device) is a new generation of
full digital AC servo drive unit produced by our company. This product includes two control modes
of speed and position. It can be matched with various open-loop and closed-loop control systems
and has been widely applied to CNC machine tools and
automatization industry. Internationally advanced
special-purpose chip for motor control
(TMS320LF2407A DSP), complex programmable logic
display (CPLD) and MITSUBISHI intelligent power
module (IPM) are adopted inside the servo, so it has
such advantages as high degree of integration,
compact, perfect protection and good reliability. The
optimal PID is employed to achieve PWM control.
Performance of this product has reached
internationally advanced level among its peers at home
and aboard.
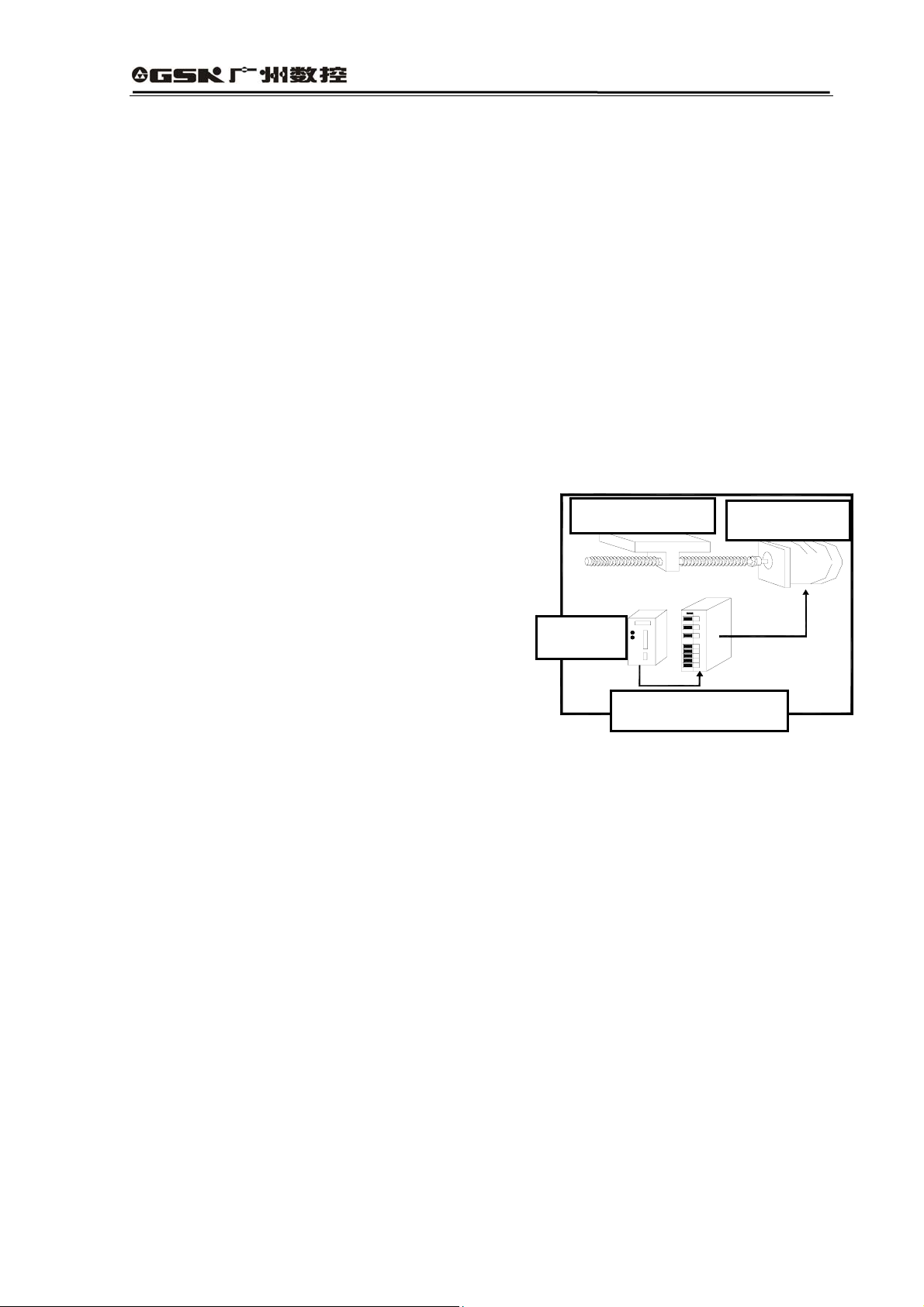
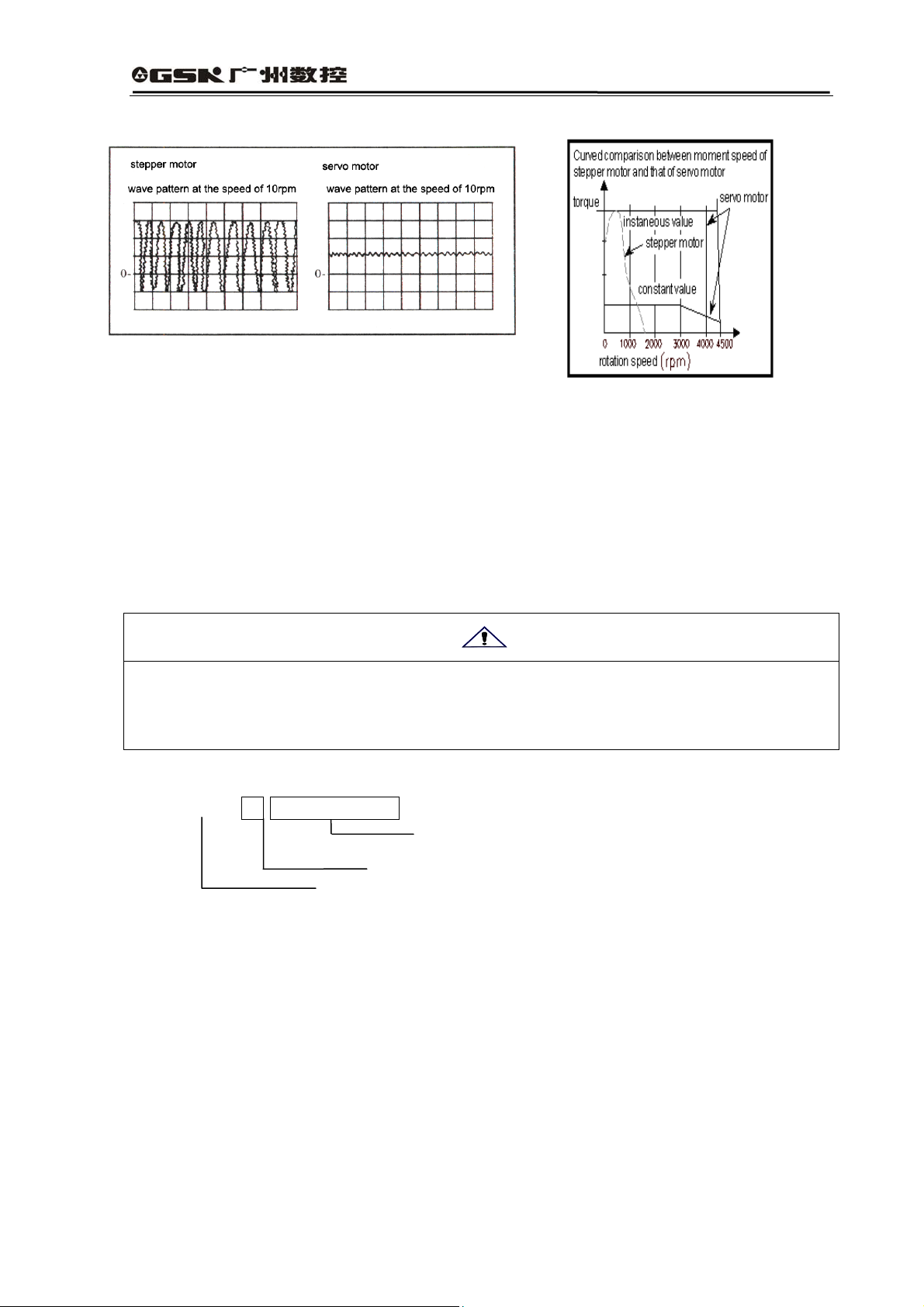
Compared with stepper drive, DA98D AC servo unit has the following strong points:
z Avoid out-of-Synchronization Phenomena
Servo motor has encoder on itself and the position signal will be fed back to the servo drive
unit, forming a semi-closed loop system together with the open-loop position controller.
z Wide speed ratio and constant torque
Speed ration is 1:5000, with stable torque characteristics from low speed to high speed.
z High speed and precision
The maximal rotation rate of servo motor can reach 3000r/min, with a rotary positioning
precision 1/10000r.
Notes: maximal rotatation rate is not the same with different models of servo motor.
z Easy and flexible control
Through parameter changing, working methods and characteristics of the servo drive unit
can be properly set to comply with different requirements.
open-loop control
controller
positioning command
stepper motor
1
Page 13
DA98D User Manual
1.2 Arrival Examination
1) After the product arrives, please see to examine the following aspects:
(1) Whether the packing case is in good conditions, and whether the product is damaged
during transportation?
(2) Check nameplates of the servo drive unit and servo motor to confirm whether the
products received comply with the order.
(3) Check packing list to confirm whether the accessories are complete.
Attention
z Servo system shall not be installed when it is damaged or does not have complete parts.
z Servo drive unit must be used together with the servo motor whose performance matches
that of the former.
z If there is any doubt about the products received, please contact supplier or us.
2) Model meaning:
a) Models of servo drive unit
DA98D-06-110SJT-M020E
Model matching servo motor (indicate GSK SJT series) 1※
Output power: two-digit (04, 06……23) correspond to 0.4~2.3KW 2※
Series Code
※1: It can be matched with other domestic or imported servo motor. If there is no parameter in
the drive unit, it can only be matched with SJT and ST series of servo motors.
※2: Small power (1.5KW or less) means standard configuration; medium power (more than
1.5KW but less than 1.6KW) means thicker radiator.
Notes: when the product is delivered from the factory, the product model has been
completed in the above column. Please check them with the product
nameplate.
b) Models of servo motor
DA98D AC servo drive unit can be matched with many domestic or exported servo motors,
which is at your option. Chapter Eight of this manual will provide information about SJT
2
Page 14

DA98D User Manual
series of servo motor from GSK and ST series of servo motor from New Motor Company of
Huazhong University. Information about other models will be provided with the servo motor
delivered.
2) Accessories
a) Standard Accessories of DA98D servo drive unit
① User Manual (this manual) 1
M4×8 countersunk head screws 4
②
③ CN1 Plug (DB44 female) 1 (note 1)
④ CN2 Plug (DB25 male) 1 (note 2)
Note 1: For matching our position controller, it will be provided together with the
signal cable, whose standard length is 3 meters.
Note 2: when we provide servo motor, you can ask us to provide its matching
feedback cable, whose standard length is 3 meters.
b) Standard accessories of servo motor will be provided according to user
instructions.
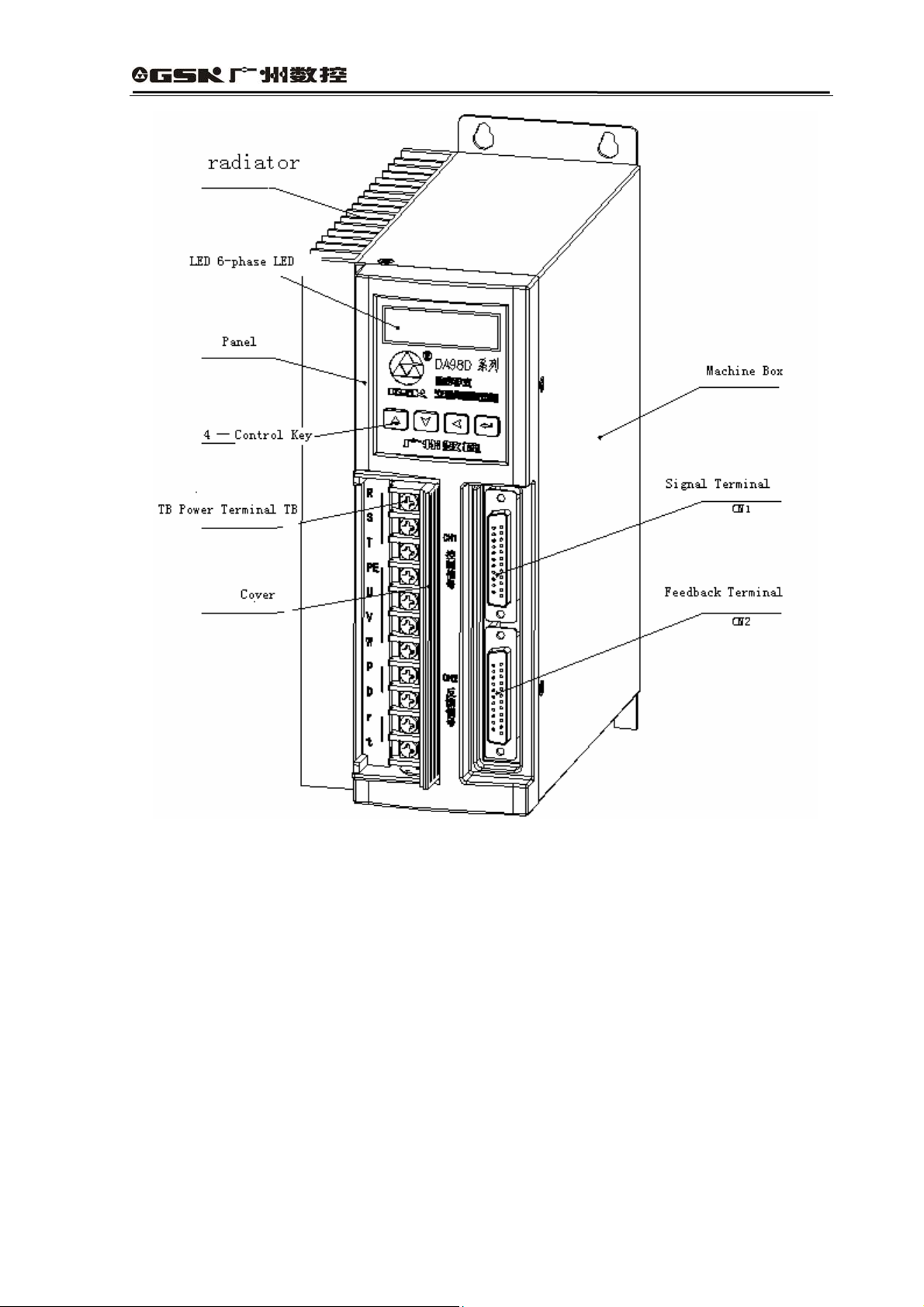
1.3 Product Appearance
1) Appearance of servo drive unit
3
Page 15
DA98D User Manual
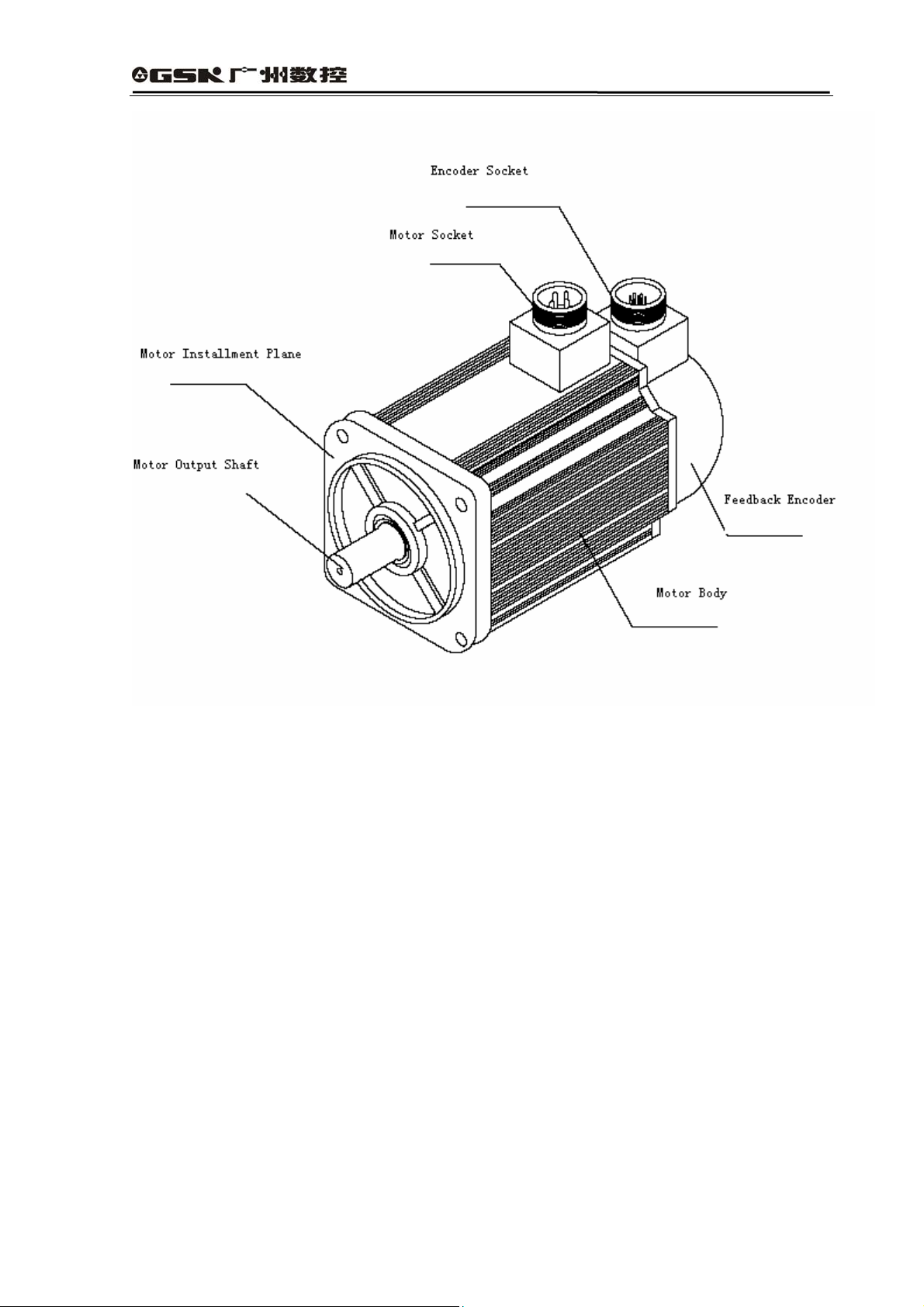
2) Servo motor appearance
Fig. 1-1 Appearance of Servo Drive unit
4
Page 16
DA98D User Manual
Fig. 1-2 Servo Motor Appearance
5
Page 17
DA98D User Manual
Chapter Two Installment
z The products must be stored and installed according to the requirements for environmental
conditions.
z The products can be piled up with a limited number; over-piling shall not be allowed to
prevent the products from being damaged or falling.
z The products must be stored and transported with original package.
z Product shall not be installed when it is damaged or does not have complete parts.
z Fireproof material is needed for the product installment; the product shall not be installed
above or around combustible article to prevent fire.
z Servo drive unit must be installed within electric cabinet to prevent invasion of dust, corrosive
air, conductive matters, liquid, combustible and explosive substances.
z Servo drive unit and servo motor shall avoid vibration. Impact shall be strictly forbidden.
z It is forbidden to draw wire, motor shaft and encoder of the servo motor.
Attention
2.1 Environmental Conditions
Items DA98DServo Drive unit GSK SJT Series of AC Servo Motor
Operation
Temperature/
Humidity
Storage
Temperature/
Humidity
Atmospheric
Environment
Height
0℃~55℃ (no frozen frost)
Less than 90%RH (no dew
condensation)
-20℃~80℃
90%RH(no dew)
Within the control panel, there
shall be not corrosive air,
combustible air, oil fog or dust.
Less than 1000m above sea
level
-10℃~40 (℃ no frozen frost))
90%RH (no dew condensation)
-40℃~55℃
85%RH ( no dew)
Within the room (no insolation), there shall be
not corrosive air, combustible air, oil fog and
dust.
Less than 1000m above sea level
Vibration Less than 0.5G(4.9m/s2)10 Hz -60Hz (non-continuous operation)
Degree of
Protection
IP00 IP54
2.2 Installment of Servo Drive unit
z Servo drive unit must be installed in the electric cabinet with good protection.
z Servo drive unit must be installed according to direction and interval as stipulated. Good
conditions for heat radiating should be guaranteed.
z It shall not be installed above or around combustible articles to prevent fire.
1) Installment Environment
(1) Protection
Attention
6
Page 18
DA98D User Manual
The servo driver does not have any protection within its own structure, so it must be
installed within the electric cabinet with good protection and prevented from contact of
corrosive and combustible air. Conductive matters, metal dust, oil fog or liquid shall be
prevented from entering inside.
(2) Temperature and Humidity
The environmental temperature shall be kept between 0 and 50 , while temperature for ℃℃
long-term safety operation shall be kept below 45 . Good conditions for heat radiating ℃
shall be guaranteed.
(3) Vibration and Impact
When installing the drive unit, vibration shall be avoided. Vibration reduction measures shall
be taken to control the vibration below 0.5G (4.9m/S2).
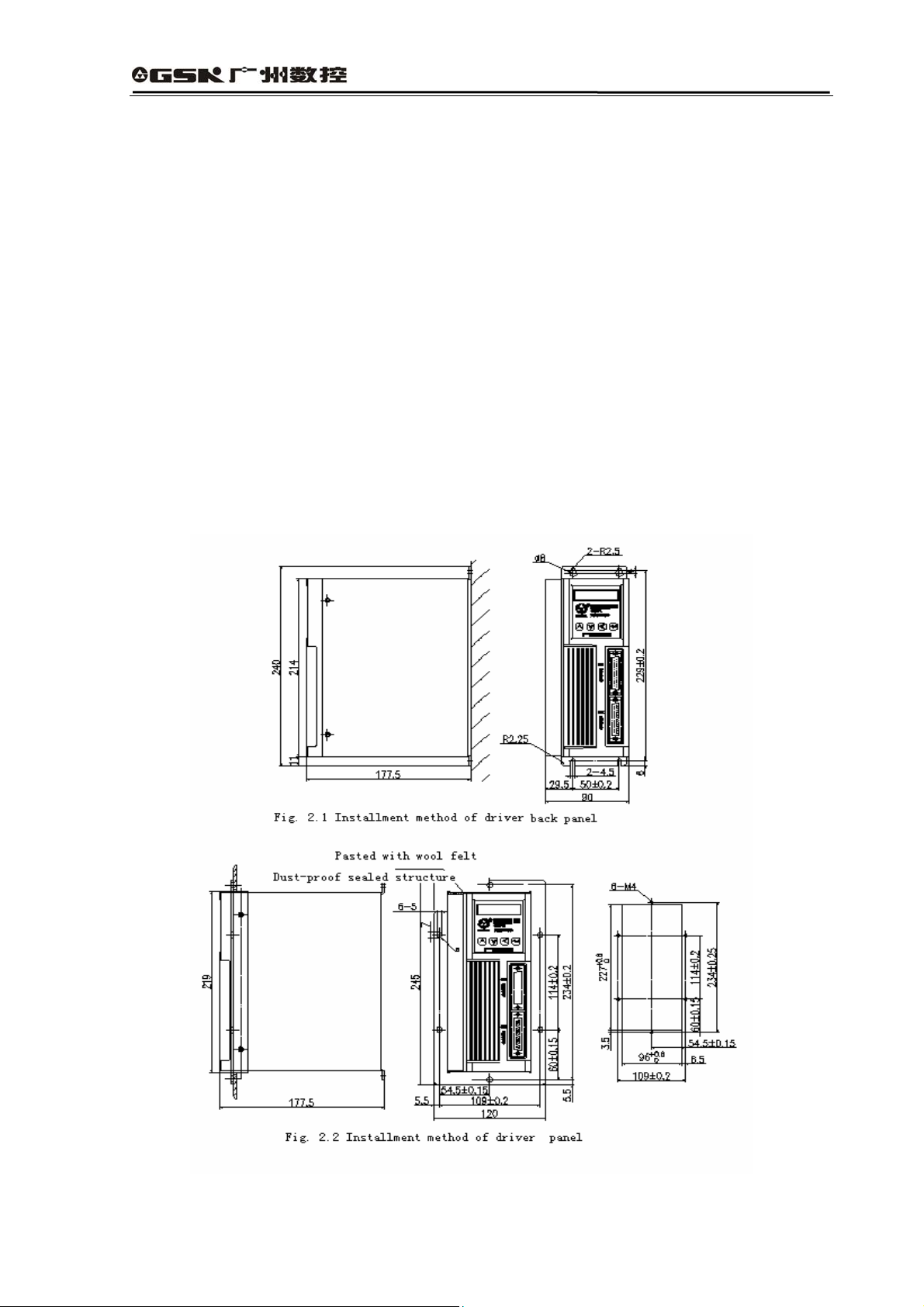
2) Installment Methods
(1) Ways of Installment
The user can adopt the ways of installment by back panel or panel. The installment shall form
an upward right angle with the installment plane. Fig. 2.1 is a schematic diagram for
installment by back panel and Fig. 2.2 is a schematic diagram for installment by panel.
7
Page 19
DA98D User Manual
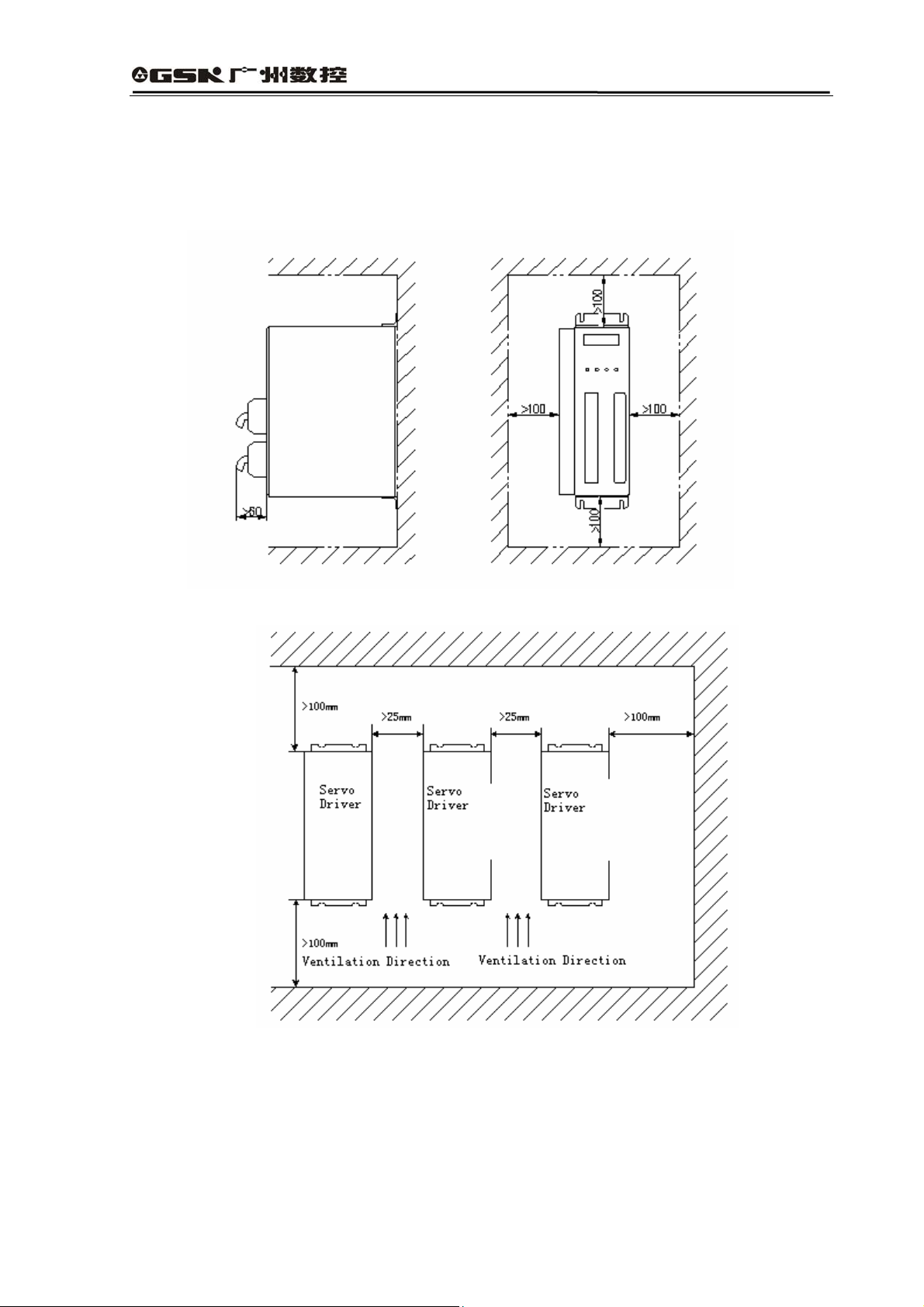
(2) Installment Interval
Fig. 2.3 shows the installment interval for single drive unit and Fig. 2.4 shows the installment
interval for multiple drive units. In actual installment, the interval shall be as great as possible
to ensure good conditions for heat radiating.
Fig. 2.3 Installment for Single Drive unit
Fig. 2.4 Installment Interval for Multiple Drive units
(3) Heat Radiating
To ensure that surrounding temperature of the drive unit will not be constantly increased,
there shall be convective-current wind blowing towards radiator of the drive unit within the
electric cabinet.
8
Page 20
DA98D User Manual
2.3 Installment of Servo Motor
z Shock on the motor shaft or encoder shall be forbidden to prevent the motor from vibration or
impact.
z The motor shall not be moved by drawing motor shaft, leading-out wire or encoder.
z Load on the motor shaft shall not surpass its limit; otherwise, the motor may be damaged.
z The motor must be firmly installed with anti-loosening measures.
1) Installment Environment
(1) Protection
Currently, GSK SJT series and Huazhong Series of servo motor are not water
resistant, so liquid must not be spattered on the motor during installment. Oil or
water must be prevented from entering inside the motor through leading-out wire or
the motor shaft.
Attention
Notes: if the user needs water-resistant servo motor, please make a clear
indication in the order.
(2) Temperature and Humidity
The environmental temperature shall be kept between -10 and 40 . After long ℃℃
hours of operation, the motor will have an increasingly hot temperature, so
compulsory heat radiating shall be considered when the surrounding space is
relatively small or there are heating equipment.
The humidity shall not be more than 90%RH, without dew condensation.
(3) Vibration
Servo motor shall not be installed at places with vibration. The vibration inflicted on
the motor shall not be more than 0.5G (4.9m/s
2) Installment Methods
Ways of Installment
(1)
Currently, SJT and ST series of motors adopt the way of installment by the flange with
arbitrary installment direction.
(2) Notes:
2
).
z When dismantling or installing the belts and wheels, shock on the motor or motor
shaft shall be forbidden to prevent the encoder from being damaged. Screw
pressing tools shall be employed in the dismantlement or installment.
z Currently, most of the SJT and ST series of motors cannot bear shaft-direction or
radial-direction loads. Coupling is recommended for connecting the loads.
z When fastening the motor, the anti-loosening washer shall be used to prevent the
motor from loosening.
9
Page 21
DA98D User Manual
c
e
Chapter Three Wiring
Warning
●Personnel involved in wiring or examination must possess sufficient abilities in this task.
●Wiring and examination must be conducted 5 minutes after the power is off for preventing electri
shock.
●The wires must be connected according to terminal voltage and electrode to prevent th
equipment from being damaged or personnel from being hurt.
● The drive unit and servo motor must have good ground contact.
3.1 Standard Wiring
External connection of the drive unit is related to the control modes.
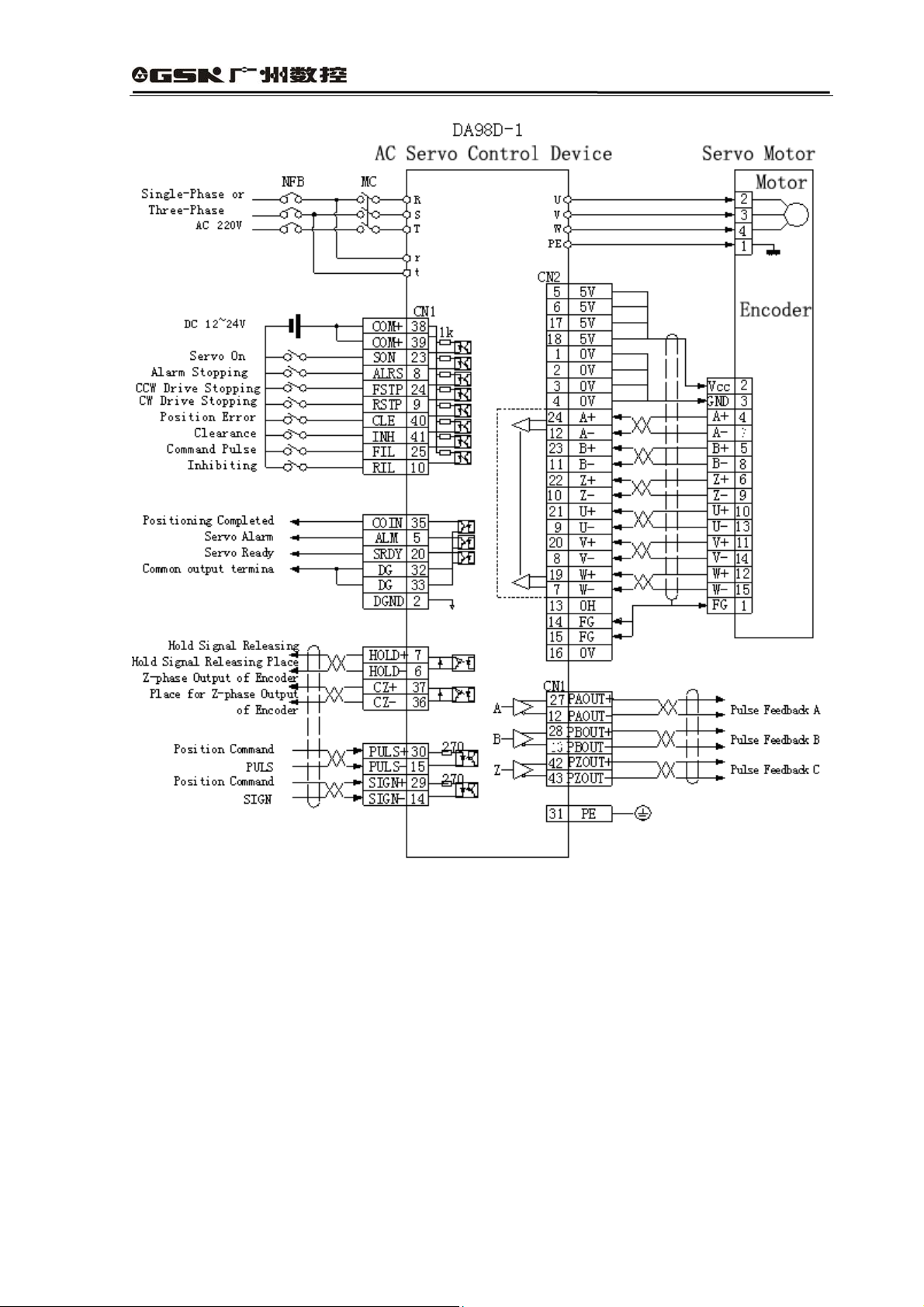
1) Position Control Mode
Fig. 3.1 shows standard wiring for the position control mode.
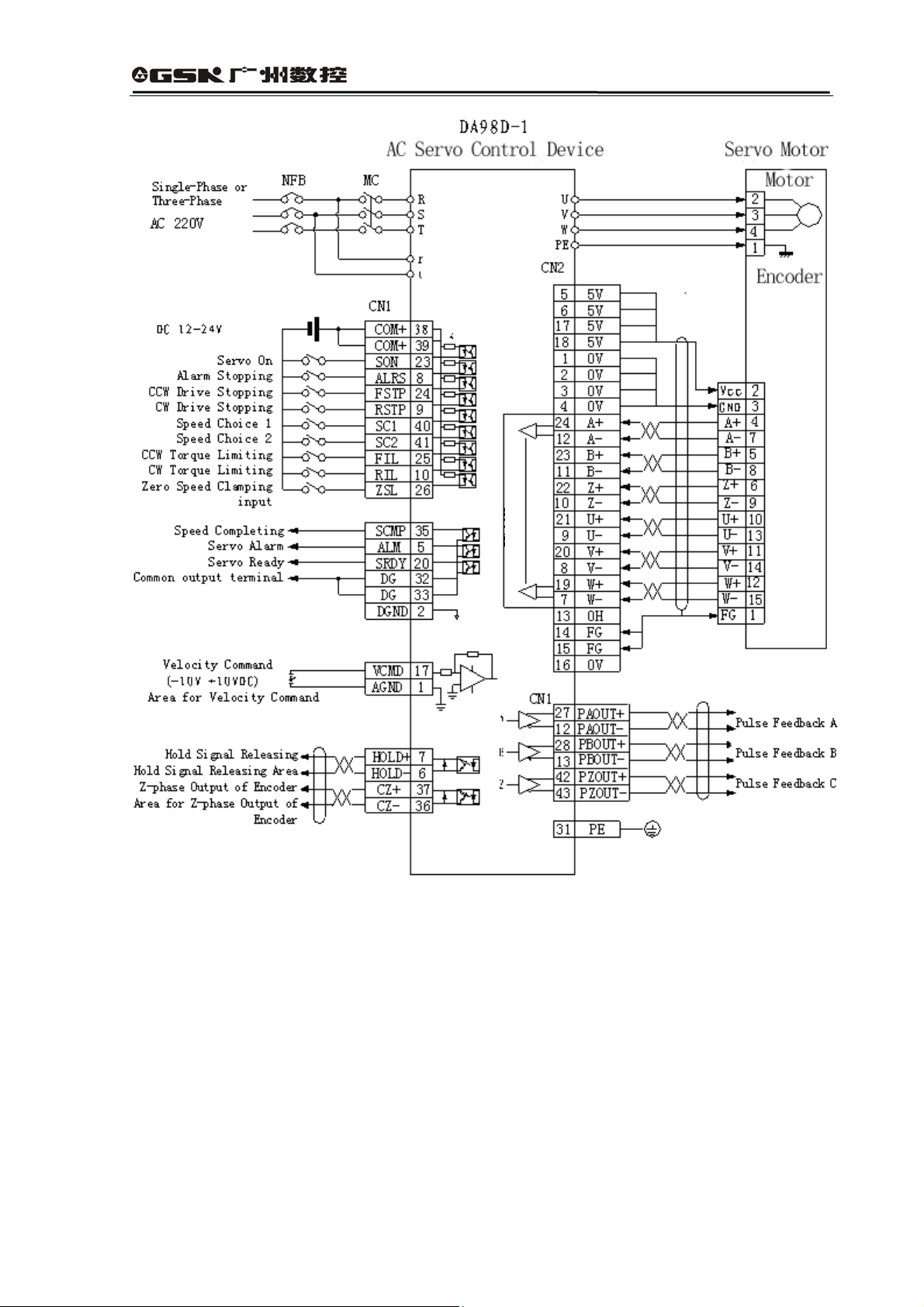
2) Speed Control Mode:
Fig. 3.2 shows the standard wiring for the speed control mode.
3) Wire Distributing
(1) Power Terminal TB
z Wire cross-sectional area: Terminals of R, S, T, PE, U, V and W have an area
2
1.5mm
(AWG16-18) and more.
z Grounding: the grounding wire shall be as thick as possible. The servo driver and
motor has ground contact at the point of PE terminal with a grounding resistance
less than 100Ω.
z Terminal connection adopts SVM2-4 pre-insulation cold pressing terminal. The
connection must be fastened.
z It is recommended to supply power with three-phase isolating transformer, which
will reduce the possibility of electric shock.
z It is recommended that the power supply gives power through noise filter for
enhancing anti-jamming ability.
z Please install non-fuse breaker (NFB) in order to cut off external power supply
when the driver breaks down.
(2) CN2Contrl Signal CN1 and Feedback Signal CN2
z Wire material selecting: employ shielding cable (best with inter-twisted shielding
cable), the cross-section area of the core shall be 0.12mm
The shielding layer shall be connected with FG terminal.
z Wire and cable length: wire and cable shall be as short as possible; control signal
CN1 shall not be longer than 3 meters while the feedback signal CN2 cable shall not
be longer than 20 meters.
z Wire laying: Wire shall be laid far away from the power circuit to prevent jamming.
(AWG14-16) and more while terminals of r and t have an area 1.0 mm2
Attention
2
(AWG24-26) and more.
10
Page 22
DA98D User Manual
e
e
a
5
z Please install surge absorbing elements in sensible elements (loop) in related
circuits: DC loop is reversely connected in parallel with continuous current diode
while AC loop is connected in parallel with capacitance-resistance absorbing return
circuit.
Attention
U, V and W shall be connected with motor winding in the way of one-to-one correspondence. Revers
connecting shall be forbidden.
The wires and leads shall be fastened firmly and avoid approaching radiator of the drive unit and th
motor for the fear that the insulation performance will be reduced due to heat.
There will remain large quantities of electrolyzed capacitance in the servo drive unit, so there will
high remaining voltage even after the power is cut off. Do not touch drive unit or motor within
minutes after the power is off!
11
Page 23
DA98D User Manual
AM26LS32 Receiver
Fig. 3.1 Standard Wiring for Position Control Mode
12
Page 24
DA98D User Manual
AM26LS32 Receiver
Fig. 3.2 Standard Wiring for Speed Control Mode
13
Page 25

DA98D User Manual
3.2 Functions of Terminals
1) Configuration of Terminal
Fig. 3.3 is a configuration chart for interface terminals of the servo drive unit. TB is the plate
of terminals; CN1 is for connector of DB44 with male socket and female plug; CN2 is also
for connector of DB28 with female socket and male plug.
14
Page 26

T
R
S
T
PE
U
W
t
DA98D User Manual
B
V
P
D
r
CN2
13
12
11
25
24
23
10
22
19
6
18
17
15
14
1
9
21
8
20
7
5
4
16
3
2
MHP
NC
AA+
B-
B+
Z-
Z+
U-
U+
VV+
WW+
+5V
+5V
+5V
+5V
0V
0V
0V
FG
0V
FG
0V
DB25
Fig. 3.3 Configuration Chart for Interface Terminals of Servo Drive unit
2) Power Terminal TB
Table 3.1 Power Terminal TB
Terminal
No.
TB-1 R
TB-2 S
TB-3 T
TB-4 PE
TB-5 U
TB-6 V
TB-7 W
TB-8 P Back up
TB-9 D Back up
TB-10 r
TB-11 T
Terminal
Mark
Terminal Name Functions
Major Loop
Power
Single-phase or
Three-phase
Input terminal of major return circuit power
~220V 50Hz
Notes: Do not connect with motor output terminals
of U, V and W.
Grounding terminals
Product
Earthling
Grounding resistance is less than 100Ω;
Servo motor output and power input have ground
contact at the common point.
Servo Motor
Output
Control Power
Single-Phase
Servo motor output terminal; shall be connected
with motor terminals of U, V and W in the way of
one-to-one correspondence
Input terminal for control circuit power
~220V 50Hz
3) Control Terminal CN1
Simplified form of Control Modes:
P stands for position control mode
S stands for speed control mode
15
Page 27

DA98D User Manual
e
e
r
Table 3.2 Control Signal Input/Output Terminal CN1
Terminal
No.
Terminal
Name
Mark I/O Mode Functions
Power
CN1-38
CN1-39
Anode of
Input
COM+ Type l
Terminal
CN1-23 Servo On SON Type1
CN1-8
CN1-24
CN1-9
Alarm
Stopping
CCW Driv
Stopping
CW Driv
Stopping
Error Mete
Clearance
ALRS Type1
FSTP Type1
RSTP Type1
CLE Type1 P
CN1-40
Speed
Choice 1
SC1 Type1 S
Power anode of input terminal
Used to drive photoelectrical coupler in the input
terminal
DC12~24V, current ≥100mA
Servo on input terminal
SON ON: allow driving operation
SON OFF: the driver is closed and stops work; the
motor is under free state
Note 1 before switching SON OFF to SON ON, the
motor must be in stillness;
Note 2: after SON ON is switched on, wait at least
50ms before inputting commands.
Input terminal for alarm stopping
ALRS ON: stop system alarm
ALRS OFF: maintain system alarm
Note1: Alarm for failure code larger than 8 can not
be stopped with this method; it needs to cut off the
power for examination and repair, and then switch
on power.
Input terminal for CCW(counter clockwise) drive
stopping
FSTP ON: allow CCW driving operation
FSTP OFF: stop CCW driving operation
Note 1: If limit of the machine is surpassed, the
CCW torque will remain zero when switching on
OFF.
Note 2: The function of FSTP OFF can be
screened off or the function of “ON” can
permanently surface by setting No.20 parameter.
Input terminal for CW(clockwise direction) drive
stopping
RSTP ON: allow CW driving operation
RSTP OFF: stop CW driving operation
Note 1: If limit of the machine is surpassed, the
CW torque will remain zero when switching on
OFF.
Note 2: The function of FSTP OFF can be
screened off or the function of “ON” can
permanently surface by setting No.20 parameter.
Input terminal for clearing position error meter
CLE ON: Position control ; the position error meter
will be cleared
Input terminal for speed choice 1
Under the speed control mode, the combination of
SC1 and SC2 can be used to select different
internal speeds
SC1 OFF,SC2 OFF: internal speed 1
SC1 ON,SC2 OFF: internal speed 2
SC1 OFF,SC2 ON: internal speed 3
SC1 ON,SC2 ON: internal speed 4
Note: the values of internal speed 1 to 4 can be
changed with parameters.
16
Page 28

DA98D User Manual
e
r
r
r
CN1-41
CN1-41
CN1-25
CN1-10
CN1-20
CN1-5
CN1-35
Command
Pulse
Inhibiting
Command
Pulse
Inhibiting
Speed
Choice 2
CCW
Torque
Limiting
CW Torqu
Limiting
Servo
Ready fo
Output
Servo Alarm
Output
Output fo
Positioning
Completing
Output fo
Speed
Completing
INH Type1 P
INH Type1 P
SC2 Type1 S
FIL Type1
RIL Type1
SRDY Type2
ALM Type2
COIN Type2 P
SCMP Type2 S
Input terminal for command pulse inhibiting
INH ON: command pulse input is inhibited
INH OFF: command pulse input is valid
Input terminal for position command pulse
inhibiting
INH ON: command pulse input is inhibited
INH OFF: command pulse input is valid
Input terminal for speed choice 2
Under the speed control mode, the combination of
SCA and SC2 can be used to select different
internal speeds.
SC1 OFF,SC2 OFF: internal speed 1
SC1 ON:SC2 OFF: internal speed 2
SC1 OFF,SC2 ON: internal speed 3
SC1 ON,SC2 ON: internal speed 4
Input terminal for CCW(counter-clockwise
direction) torque limiting
FIL ON:CCW torque is limited within the scope of
parameter No.36
FIL OFF: CW torque is not limited by parameter
No.36
Note 1: No matter FIL is on or off, CCW torque will
still be limited by parameter No.34. Generally,
parameter No.34 > parameter No.36
Input terminal for CW(clockwise direction) torque
limiting
RIL ON: CW torque is limited within the scope of
parameter No.37.
RIL OFF: CW torque is not limited by parameter
No.37
Note 1: No matter FIL is on or off, CCW torque will
still be limited by parameter No.35. Generally,
parameter No.351 > parameter No.371
Terminal of Servo Ready for Output
SRDY ON: Control power supply and main power
supply are normal, the driver alarm does not
occur, and the servo gets Ready for Output ON.
SRDY OFF: the main power supply is not cut off or
the driver alarm occurs, and the servo gets Ready
for outputting OFF.
Output terminal for servo alarm
ALM ON: servo driver alarm dose not occur, and
the servo is Ready for outputting ON.
ALM OFF: servo driver alarm occurs and the servo
is Ready for outputting OFF.
Output terminal for positioning completing
COIN ON: when the value of position error meter
is within the set scope of positioning, ON will be
output for positioning completing.
Output terminal for speed completing
SCMP ON: when the speed reaches or surpasses
the set speed, On will be output for speed
completing.
17
Page 29

DA98D User Manual
Common
CN1-32
CN1-33
edge of
Output
DG
Common
edge
terminal
Z-Phase
CN1-37
output of
CZ Type2
Encoder
CN1-26
Zero Speed
Clamping
ZSL Type1
CN1-36 CZCOM
CN1-30 PULS+
CN1-15
Command
Pulse Input
PULS-
Type3 P
CN1-29 SIGN+
CN1-14
Command
Pulse Input
SIGN-
Type3 P
Earthling common edge of control signal output
terminal (excluding CZ)
Output terminal for Z-phase of encoder
Output Z-phase pulse of servo motor’s
photoelectric code
CZ ON: Z-phase signal appears
ZSL ON: Servo driver is not under the control of
analog voltage, and zero speed is output.
ZSL OFF: servo driver is under the control of
analog voltage
Common edge of encoder’s Z-phase output
terminal
Input terminal for external command pulse
Note 1: the pulse input modes are set by PA14.
Mode of command pulse+ symbol;
Mode of CCW/CW command pulse
CN1-31
CN1-2
CN1-16
CN1-17
CN1-1
CN1-7
CN1-6
CN1-27
CN1-12
CN1-28
Shielding
Ground
Wire
Analog
Ground
Input
Simulation
Command
Input Analog
command
Ground
Positive
Terminal of
Hold Output
Negative
Terminal of
Hold
Output
Code disc
Pulse A+
Code disc
Pulse A-
Code disc
Pulse B+
FG Earthling shielding terminal
AGND S Analog ground
VCMD S
Type4
SG
S
HOLD+ S/P
Type2
HOLD-
S/P
Input analog command+-10V
Input resistance of 20K
Open-loop output of drain electrode, the
photoelectric coupler is open under normal
operation. ON is output
The power is off and the drive stops. When alarm
stops, the photoelectric coupler is closed. OFF is
output
Feedback output signal of encoder. The standard
PAOUT
+
Type5
S
is 2500/line
Output linear speed can be adjusted through
electronic gears of output PA 41 and PA42, e.g. if
PAOUT- S
the encoder has 2500 pulses per round, setting
PA41/42=4/5, then the A and B-phase signals
output from drive unit will be 2500 X
PBOUT
+
PA41/PA42=2000 pluses/round.
18
Page 30
DA98D User Manual
CN1-13
CN1-42
CN1-43
Code disc
Pulse B-
Code disc
Pulse Z+
Code disc
Pulse Z-
PBOUT-
PZOUT
+
PZOUT-
Feedback Signal Terminal CN2
Table 3.3 Encoder Signal Input/Output Terminal CN2
Terminal
No.
Terminal Name
Terminal Mark
Mark I/O Mode
CN2-5
CN2-6
CN2-17
Power Output+ +5V
CN2-18
CN2-1
CN2-2
CN2-3
Power Output- OV
CN2-4
CN2-16
CN2-24
CN2-12
CN2-23
CN2-11
CN2-22
CN2-10
CN2-21
CN2-9
CN2-20
CN2-8
Encoder A+Input
Encoder A-Input
Encoder B+Input
Encoder B-Input
Encoder Z+Input
Encoder Z-Input
Encoder U+Input
Encoder U-Input
Encoder V+Input
Encoder V-Input
A+
A-
B+
B-
Z+
Z-
U+
U-
V+
V-
3.3 I/O Interface Principle
Type4
Type4
Type4
Type4
Type4
One pulse will be output from one round of the
motor.
Color Functions
Photoelectric encoder of the servo
motor employs + 5V power supply;
When the cable is relatively long, it
should use multiple component wires
that are connected in parallel.
Connected with A+ phase of the servo
motor’s photoelectric encoder
Connected with A- phase of the servo
motor’s photoelectric encoder
Connected with B+ phase of the servo
motor’s photoelectric encoder
Connected with B- phase of the servo
motor’s photoelectric encoder
Connected with Z+ phase of the servo
motor’s photoelectric encoder
Connected with Z- phase of the servo
motor’s photoelectric encoder
Connected with U+ phase of the servo
motor’s photoelectric encoder
Connected with U- phase of the servo
motor’s photoelectric encoder
Connected with V+ phase of the servo
motor’s photoelectric encoder
Connected with V+ phase of the servo
motor’s photoelectric encoder
19
Page 31
DA98D User Manual
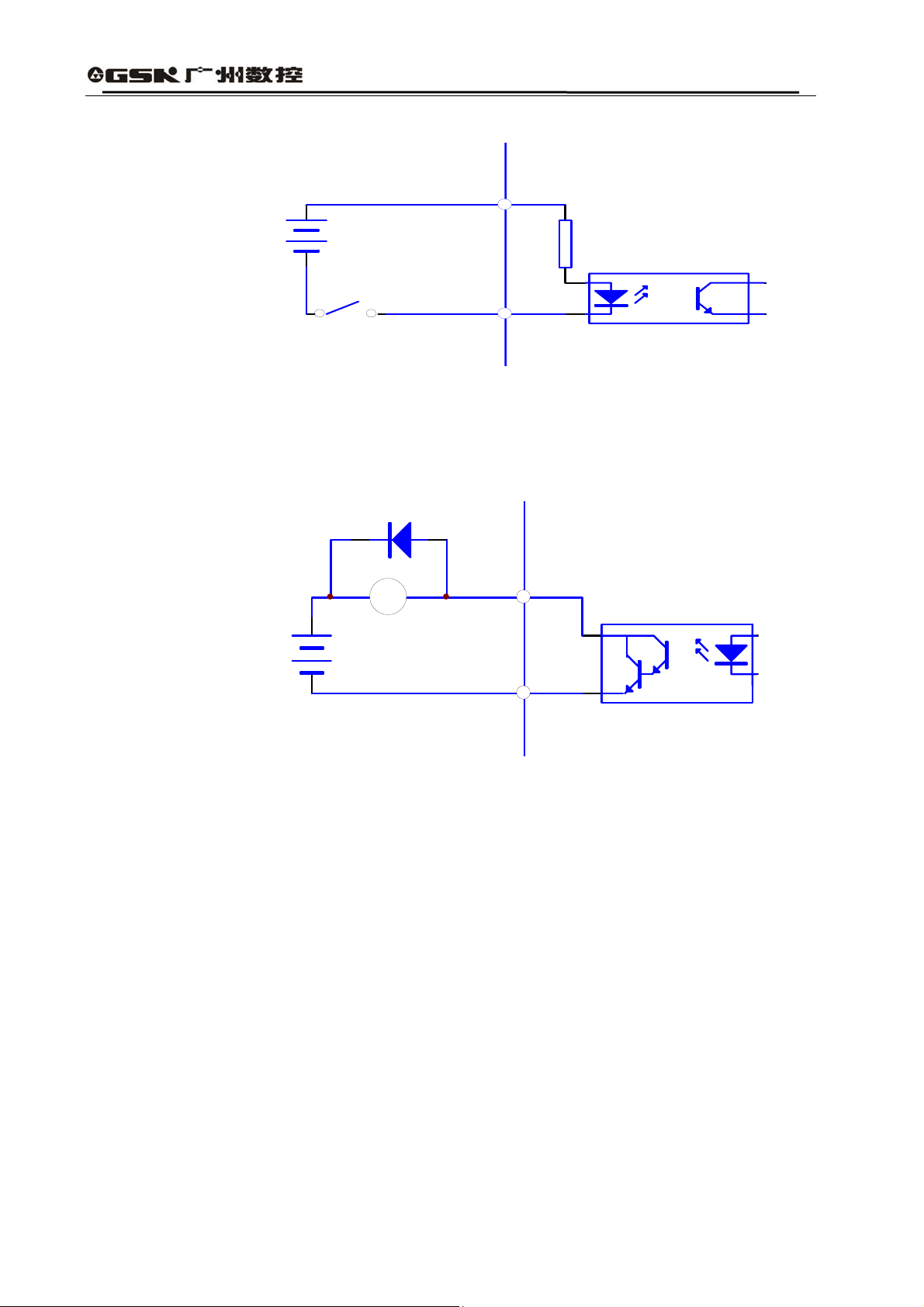
1) Switch Value Input Interface
COM+
SW
Fig. 3.4 Type1 Switch Value Input Interface
(1) Power supply is provided by the user, DC12~24V, current≥100mA;
(2) Note: if the electrodes are reversely connected, the servo driver will not work.
servo amplifier
Driver Sideface
4.7K12~24V
2) Switch Value Output Interface
Driver Side
servo amplifier
max 50mA
max 25V
Fig. 3.5 Type2 Switch Value Ouput Interface
(1) The external power supply is provided by the user, but attention must be given to the case
that if electrodes of the power supply are reversely connected, the servo drive unit may be
damaged.
(2) The output is an open-circuit form of collector, with a maximal current of 50mA and a maximal
external power voltage of 25V. Therefore, the load of switch value output signal must satisfy
this limited requirement. If the limited requirement is surpassed or the output terminal is
directly connected with the power supply, the servo drive unit will be damaged;
(3) If the loads are inductive ones like relay, two sides of the load must be reversely connected in
parallel with the continuous current diode. If the continuous current diode is reversely
connected, the servo drive unit will be damaged.
3) Analog Input Interface
20
Page 32

DA98D User Manual
1. Input signal is connected with twisted-pair cable lines.
2. The circuit adopts the enlarged different-mode form, with an input resistance of 20K.
4) Pulse Output Interface
B
5
6
Fig. 3.6 Type4 Analog Command Input Interface
Driver Sideface
servo am pl i fier
PULS+
220
PULS-
SIGN+
220
7
SIGN-
Fig. 3.7 Type3 Differential Drive Mode of Pulse Input Interface
servo am plifier
VCC
PULS+
R
R
PULS-
SIGN+
SIGN-
Driver Side
220
220
Fig. 3.8 Type4 Uni-polar Drive Mode of Pulse Input Interface
(1) For correctly transmitting pulse data, it is recommended to adopt the differential drive mode;
(2) Under differential drive mode, AM26LS31 and MC3487 or similar cable driver of RS422;
(3) The uni-polar drive mode will reduce the motion frequency. According to the requirements on
the pulse amount input circuit: driving current 10~15mA and limited maximal external power
voltage of 25V, empirical data are as follows: VCC=24V,R=1.3 ~ 2k;VCC=12V,R=510 ~
21
Page 33

DA98D User Manual
820Ω;VCC=5V,R=82~120Ω.
(4) When adopting uni-polar drive mode, the external power supply will be provided by the user, but
attention must be given to the case that if the power electrodes are reversely connected, the
servo drive unit may be damaged.
(5) Refer to Table 3.4 for details about the pulse input forms, in which the arrow means counting
trend. Table 3.5 shows the time sequence and parameters for pulse input.
Table 3.4 Pulse Input Forms
Forms of Pulse
CCW CW Set Parameter Values
Command
Symbol for Pulse
Train
PULS
0
Command Pulse+
Symbol
SIGN
CCW Pulse Train
CW Pulse Train
PULS
1
CCW Pulse/CCW
Pulse
SIGN
Table 3.5 Time sequence Parameters for Pulse Input
Parameter Differential Drive Input Uni-polar Drive Input
t
ck
>2μS >5μS
th >1μS >2.5μS
tl >1μS >2.5μS
trh <0.2μS <0.3μS
trl <0.2μS <0.3μS
ts >1μS >2.5μS
t
>8μS >10μS
qck
tqh >4μS >5μS
tql >4μS >5μS
t
<0.2μS <0.3μS
qrh
t
<0.2μS <0.3μS
qrl
tqs >1μS >2.5μS
22
Page 34

DA98D User Manual
t
PULS
SIGN
90%
10%
90%
10%
h
t
t
rh
t
rl
CW
s
t
rh
t
ck
t
s
t
rl
CCW
t
l
Fig. 3.9 Time sequence Diagram for Pulse+Symbol Input Interface (Maximal Pulse
Frequency:500kHz)
t
ck
t
h
90%
PULS
10%
t
l
CW
t
rh
t
SIGN
90%
rl
10%
CCW
t
s
t
rh
t
rl
CW
Fig. 3.10 Time sequence for CCW Pulse/CW Pulse Input Interface(Maximal Pulse
Frequency:500kHz)
4) Driver Speed Signal Output Interface
Driver Side
servo ampli fi erservo motor
X+
X-
X=A,B,Z,U,V,W
Fig. 3.11 Type5 Driver Speed Signal Output Interface
5) Input Interface for Servo Driver’s Photoelectric Encoder
AM 26LS32
23
Page 35

DA98D User Manual
Motor Side
Driver Side
X+
X-
servo ampli fi erservo motor
AM 26LS32
X=A,B,Z,U,V,W
Fig. 3.12 Input Interface for Servo Driver’s Photoelectric Encoder
24
Page 36

DA98D User Manual
Chapter Four Parameters
Attention
z Personnel involved in parameter adjusting must know parameter meanings for wrong
setting may damage the equipment or hurt the personnel.
z It is recommended that the parameters should be adjusted when the motor has no load.
z The default motor parameters are adaptable to GSK SJT and Huazhong ST series of
servo motors. If other servo motors are used, the parameters shall be adjusted
accordingly; otherwise, the motor may not work normally.
4.1 Checklist of Parameters
z The following factory parameters listed are used to match the drive unit of GSK 10SJT-M020E
digital control machine tool (2N.m,3000r/min) as an example. Related parameters of different
motors are not the same.
z Software version is V804
Table 4.1 Checklist of Parameters
No. Name Mode Parameter
range
0 Password P,S 0~9999 315
1 Model Code P,S 0~569 30*
2 Software Version (Read only) P,S * *
3 Initial Display State P,S 0~20 0
4 Choice of Control Mode P,S 0~5 0
5 Speed Proportion Gain P,S 5~2000 100* Hz
6 Speed Integral Time Constant P,S 1~1000 20* ms
7 Torque Command Filter P,S 1~500 100 %
8 Low pass Filter for Speed Inspection P,S 1~500 100 %
9 Position Proportion Gain P 1~1000 40 1/S
10 Position Feed Forward Gain P 0~100 0 %
11 Low Pass Filter Cut-off Frequency for
Position Feed-forward
12 Position Command Pulse Frequency
Division Numerator
13 Position Command Pulse Frequency
Division Denominator
14 Position Command Pulse Input Mode P 0~1 0
15 Position Command Pulse Direction
Reversing
16 Range for Positioning Completing P 0~30000 20 Pulse
17 Inspection Range for Position Excess P 0~30000 400 ×100
18 Invalid Position Excess Error P 0~1 0
19 Position Command Smoothing Filter P 0~30000 0 0.1ms
20 Invalid Drive Stopping Input P,S 0~1 0
21 JOG Operation Speed S -3000~3000 120 r/min
22 Reservation
23 Maximal Speed Limit P,S 0~4000 3600 r/min
24 Internal Speed 1 S -3000~3000 0 r/min
25 Internal Speed 2 S -3000~3000 100 r/min
P 1~1200 300 Hz
P 1~32767 1
P 1~32767 1
P 0~1 0
Factory
Values
Unit
Pulse
25
Page 37

DA98D User Manual
26 Internal Speed 3 S -3000~3000 300 r/min
27 Internal Speed 4 S -3000~3000 -100 r/min
28 Speed Completing S 0~3000 500 r/min
29 Reservation
30 Linear Velocity Conversion Numerator P,S 1~32767 10
31 Linear Velocity Conversion
P,S 1~32767 1
Denominator
32 Decimal Position of Linear Velocity P,S 0~5 3
33 Zero Speed Scope for Analog
S 0~1000 3
Command
34 Internal CCW Torque Limiting P,S 0~300 300* %
35 Internal CW Torque Limiting P,S -300~0 -300* %
36 External CCW Torque Limiting P,S 0~300 100 %
37 Internal CW Torque Limiting P,S -300~0 -100 %
38 Torque Limiting for Speed Trial
S 0~300 100 %
Operation and JOG Operation
39 Acceleration Time Constant S 1~10000 0 ms
40 Deceleration Time Constant S 1~10000 0 ms
41 Numerator of Output Electronic Gear
S 1~255 1
Ratio
42 Denominator of Output Electronic Gear
S 1~255 1
Ratio
43 Choice of Speed Command S 0~1 1
44 High Speed AD Zero Point S 412~1600 1024
45 Low Speed AD Zero Point S 412~1600 1024
46 Motor Rotation Direction Control S 0~3 0
47 Analog Command Gain S 20~3000 100
48 Anti-jamming Scope for Analog
S 0~1000
Command
49 Choice of Zero Adjustment Channels
S 0~1 0
for Analog Speed
52 Analog Command Transition Mode S 0~1 0
53 Zero-point Slope S 0~1023 0
26
Page 38

DA98D User Manual
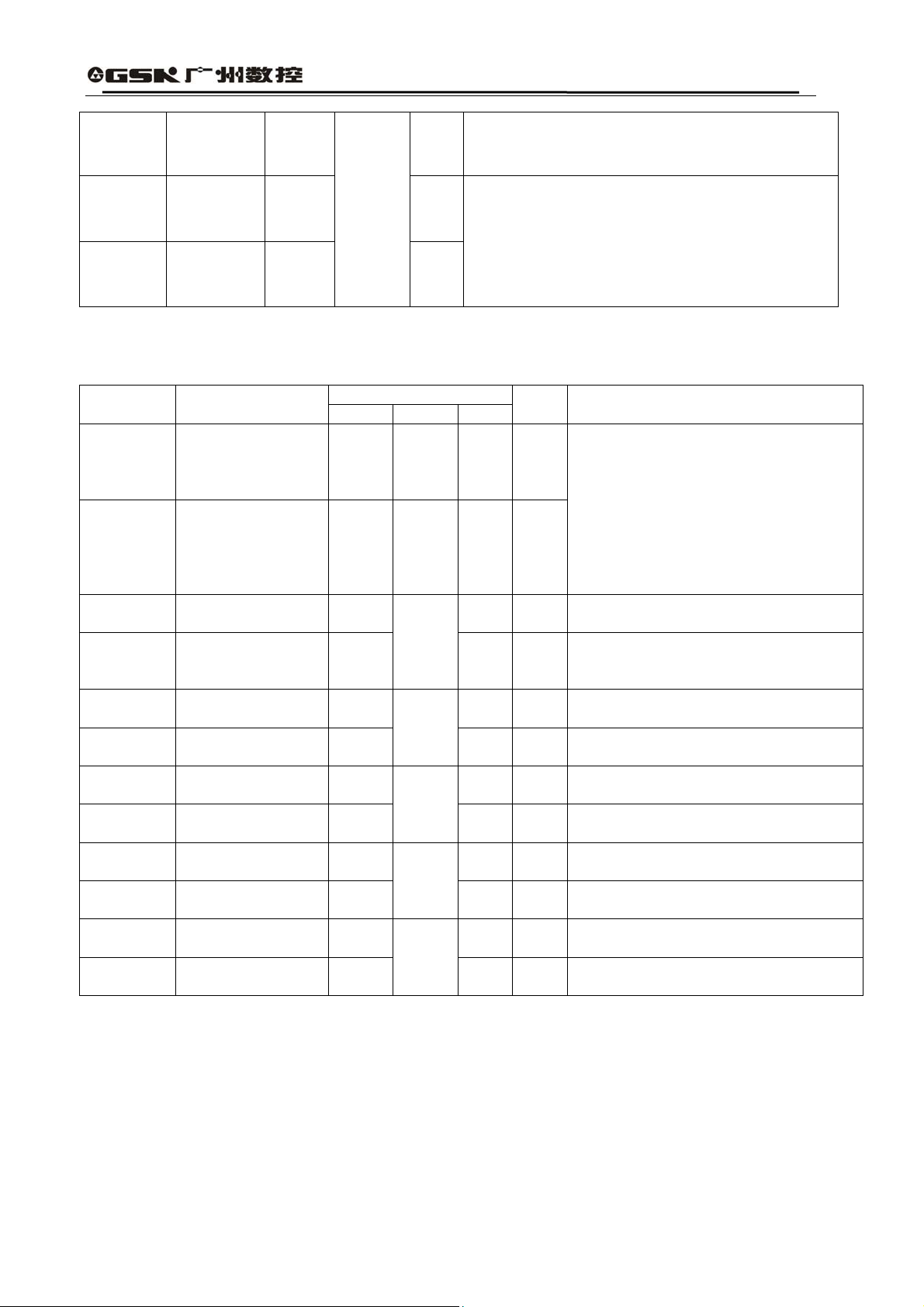
4.2 Functions of Parameters
Table 4.2 Functions of Parameters
No Name Functions
Prevent the parameters from being wrongly changed. Generally,
when needing to set parameters, first set the parameter as the
correct password, then set the parameters. After commissioning,
reset the parameter back to 0 to ensure that the parameter will not be
wrongly changed in the future.
0 Password
1 Model Code
Software
2
Version
Passwords have different classes respectively for user parameters,
system parameters and whole parameters.
When changing model code parameter (PA1), the model code
password must be used. Other passwords can not be used for
changing this parameter.
User password is 315.
Model code password is 385.
Correspond to the same series of drive units and motors with
different frequency classes.
Different model codes correspond to different default parameter
values. And when restoring the function of default parameter values,
the parameter concerned must be correct.
When EEPROM alarm (No.20) occurs, the parameter must be reset
after the repair, then restore the default parameter value. Otherwise,
the driver many not work normally or be damaged.
When changing the parameter, first set the password PAO as 385,
then the parameter concerned can be changed.
Please refer to this chapter for detained meanings about parameters.
The software version No. can be checked, but cannot be changed.
Parameter
range
0~9999
0~69
*
3
Initial
Display
State
Select display states of the driver screen after being electrified.
0: Display motor rotation rate;
1: Display that current position is lower by 5 (pulses);
2: Display that current position is higher by 5;
3: Display that current position command (means accumulated pulse
value)is lower by 5;
4: Display that current position command (means accumulated pulse
value)is higher by 5;
5:Display that position error is lower by 5;
6: Display that position error is higher by 5;
7:Display motor torque;
8:Display motor current;
9:Display linear velocity;
10:Display control mode;
11:Display position command pulse frequency;
12:Display speed command;
13:Display torque command;
14:Display absolute position of rotor during one round;
15:Display input terminal state;
16: Display output terminal state;
17:Display encoder input signal;
18:Display operation state;
19:Display alarm code;
20: Reservation.
0~20
27
Page 39

~
e
~
Choice of
Control
4
Mode
DA98D User Manual
①Control mode of the driver can be selected by setting this
parameter:
0:Position control mode;
1:Speed control mode;
2:Tiral operation control mode;
3:JOG control mode;
4: Encoder’s zero adjusting mode.
5: Opern-loop operation mode (used for testing motor and
encoder).
② Position control mode: position command is input through the
pulse input port
Speed control mode: speed command is input through the pulse
input port or analog input, which can be determined by the
parameter (internal and external speed command choice) PA42.
When internal speed is employed, the combination of SC1 and
SC2 can be used to select different internal speeds.
SC1 OFF,SC2 OFF : Internal speed 1
SC1 ON,SC2 OFF : Internal speed 2
SC1 OFF,SC2 ON : Internal speed 3
SC1 ON,SC2 ON : Internal speed 4
Trial operation control mode: the speed command is input through
the keyboard, used to test driver and motor.
JOG control mode, i.e. itching mode: after the JOG operation is
entered, press down ↑ and hold on, the motor will run at JOG
speed; leave the key, the motor will stop and keep zero speed;
press down ↓ and hold on, the motor will reversely run at JOG
speed; leave the key, the motor will stop and keep zero speed.
Encoder’s zero adjusting mode: used to adjust zero point of the
encoder disc when leaving factory
0~5
Speed
Proportion
5
Gain
Speed
Integral Tim
6
Constant
Torque
7
Command
Filter
Set proportion gain of the speed regulator.
The higher the value is set, the gain will be larger and rigidity
greater. Parameter value shall be determined by specific models
and loads of the servo drive unit. Generally, the greater the load
inertia is, the higher the value will be set.
Under the condition that the system will not produce vibration, the
value can be set as high as possible.
Set integral time constant of the speed regulator
The lower the value is set, the faster the integral speed will be and
the greater the rigidity. Parameter value shall be determined by
specific models and loads of the servo drive unit. Generally, the
greater the load inertia is, the higher will the value be set.
Under the condition that the system will not produce vibration, the
value can be set as low as possible.
Set features of the torque command filter to inhibit resonance
(sharp vibration noise produced by motor) produced by the torque;
If the motor produces sharp vibration noise, please reduce the
parameter value;
The lower the value is, the smaller the cut-off frequency will be and
the less the motor noise. If the load inertia is very great, the set
value can be properly reduced. If the value is too low, the response
will become slow and may cause instability.
The higher the value is, the greater the cut-off frequency will be
and the faster the response. If relatively high machinery rigidity is
needed, the value can be increased properly.
5 Hz
2000Hz
1 ms
1000ms
1%~500%
28
Page 40

Low Pass
~
×
×
P
Filter for
8
Speed
Inspection
Position
Proportion
9
Gain
Position
Feed-forward
10
Gain
Low Pass
Filter Cut-off
11
Frequency
for Position
Feed-forward
Position
Command
Pulse
12
Frequency
Division
Numerator
Position
Command
Pulse
13
Frequency
Division
Denominator
DA98D User Manual
Set features of low pass filter for speed inspection.
The lower the value is, the smaller will be the cut-off frequency will
be and the less the motor noise. If the load inertia is very great, the
set value can be properly reduced. If the value is too low, the
response will become slow and may cause vibration.
1%~500%
The higher the value, the greater the cut-off frequency will be and
the faster the response. If relatively fast response is needed, the
set value can be properly increased.
Set proportion gain of the position regulator.
The higher the value is, the greater the gain will be and the less the
position lagging amount will be under the condition of command
pulse with the same frequency. But if the value is too high, it may
1~1000 /S
cause vibration or over-adjustment.
The parameter is determined by specific models of the servo drive
unit and concrete loads.
Set feed-forward gain of the position loop.
When the value is set at 100%, it means that the position lagging
value will be always 0 under command pulse with any frequency.
If the position feed-forward gain is increased, the high-speed
response feature of the control system will be enhanced, but the
0%~100%
position loop of the system will be instable and easy to cause
vibration.
If not specially requiring very fast response, the feed-forward gain
of the position loop is generally set as 0.
Set low pass filter cut-off frequency of the position feed-forward.
The function of this filter is to enhance stability of the composite
position control.
1 Hz
1200Hz
Set frequency division of the command pulse (electronic gear).
Under position control mode, it can be conveniently matched with
various pulse sources by setting PA12 and PA13 parameters, thus
reaching the ideal control resolving power (i.e. angle/pulse)
required by the user.
4××=× CNGP
P: Pulse number of the input command;
G: Electronic gear ratio;
N: Motor rotation rounds;
1~32767
C: Coil round number of the photoelectric encoder. In this system C
=2500.
〖Example〗 if the input command pulse is 6000, the servo motor
rotates one round:
CN
G
=
××
=
6000
5
4250014
=
3
then the parameter PA12 is set as 5 and PA13 as 3.
⑤ Recommended range of electronic gear ratio:
1
50
50
≤≤ G
①Refer to parameter PA12. 1~32767
29
Page 41

Position
t
r
0
r
0
~
e
Command
14
Pulse Inpu
Mode
Position
Command
15
Pulse
Direction
Reversing
Range fo
16
Positioning
Completing
Inspection
Range fo
17
Position
Excess
Invalid
Position
18
Excess Error
Position
Command
19
Smoothing
Filter
Invalid Driv
20
Stopping
Input
DA98D User Manual
Set input mode of the position command pulse.
Three input modes can be set through parameters:
0: Pulse+symbol;
1:CCW pulse/CW pulse;
CCW is counter-clockwise rotation observed from the servo motor
shaft direction, defined as positive direction.
CW is clockwise rotation of observed from the servo motor shaft
direction, defined as negative direction.
Set as
0:Normal;
1: opposite to position command pulse direction.
Set pulse range for positioning completing under position control
mode.
The parameter provides a basis for judging whether drive unit has
completed the positioning under position control mode. When the
remaining pulse number in the position error meter is less than or
the same with this parameter value, the driver is deemed to
complete the positioning with the positioning completing signal of
COIN ON. Otherwise it will be COIN OFF.
SCMP.Under position control mode, the positioning completing
signal of COIN is output; under other control modes, the speed
completing signal will be output.
Set inspection range for position excess alarm.
Under the position control mode, position excess alarm will occur in
the servo drive unit when the number on the position error meter
exceeds this parameter value.
①Set as
0: Valid inspection for position excess alarm;
1: Invalid inspection for position excess alarm, stop inspecting
position excess error.
Smoothing filter of the command pulse, acceleration and
deceleration with exponential form, and the value means time
constant.
The filter will not lose input pulse but it may cause delayed
command;
The filter is used in:
Upper controller without deceleration function;
Electronic gear with relatively high frequency division (>10);
Relatively low command frequency;
Motor with leaping-forward and instable steps during operation.
When the position points to 0, the filter will not work.
①Set as
0: Valid CCW and CW drive stopping. When CCW drive stopping
switch (FSTP) is ON, CCW drive is allowed; when CCW drive
stopping switch (FSTP) is OFF, CCW torque keeps 0. Likewise, if
CCW and CW drive stopping switches are both OFF, the alarm for
drive stopping input error will occur.
1: Cancel CCW and CW input stopping. No matter what state
CCW and CW drive stopping switches are in, CCW and CW drive
will be allowed. Meanwhile, if CCW and CW drive stopping
switches are both OFF, the alarm for drive stopping input error will
not occur.
0~1
0~1
0 ~3000
pulses
0 ~3000
×100
pulses
0~1
0ms
30000×0.1
ms
0~1
30
Page 42

DA98D User Manual
21
JOG
Operation
Speed
Set JOG operation speed.
-3000 r/min
~3000r/min
22 Reservation
Maximal
23
Speed Limit
Set maximal speed limit of the servo motor.
Unrelated with the rotation direction.
If the set value surpasses the rated rotation rate, the actual highest
speed limit will be the rated rotation rate.
0 r/min
~3000
r/min
Set internal speed 1
24
Internal
Speed1
Under the speed control mode, the combination of SC1 OFF and
SC2 OFF will be used to select internal speed 1 as the speed
-3000 r/min
~3000 r/min
command.
Set internal speed 1
25
Internal
Speed 2
Under the speed control mode, the combination of SC1 ON and
SC2 OFF will be used to select internal speed 2 as the speed
-3000 r/min
~3000 r/min
command.
Set internal speed 3
26
Internal
Speed 3
Under the speed control mode, the combination of SC1 Off and
SC2 ON will be used to select internal speed 3 as the speed
-3000 r/min
~3000 r/min
command.
Set internal speed 4
27
Internal
Speed 4
Under the speed control mode, the combination of SC1 On and
SC2 ON will be used to select internal speed 4 as the speed
-3000 r/min
~3000 r/min
command.
Speed
28
Completing
Linear
Velocity
30
Conversion
Numerator
Linear
Velocity
31
Conversion
Denominator
Set speed completing.
Under non-position control modes, if the motor speed surpasses
this set value, the signal of SCMP ON will be output. Otherwise, the
signal of SCMP OFF will be output.
Under the position control mode, this parameter will not be used.
0 r/min
~3000
r/min
Unrelated to rotation direction.
Compared with other apparatus, it has slow-moving feature.
Used to display linear operation speed of the system
Decimal position of the linear velocity is determined by parameter
PA32. 0 means no decimal, 1 means the decimal position is at the
1~32767
tens, 2 means the decimal point is are the hundreds… the process
goes on by analogy.
〖Example〗 If the servo motor drives a 10mm ball lead screw, the
linear velocity conversion numerator is set at10, the denominator at
1, and decimal point at 3, then the linear velocity can be displayed
on the screen (counted in m/min). When the motor velocity is
500r/min, the linear velocity will be displayed as 5000m/min.
①Refer to parameter PA30. 1~32767
31
Page 43

Decimal
e
Position of
32
Linear
Velocity
Zero Speed
Scope for
Analog
33
Command
Internal
CCW Torque
Limiting
34
Internal CW
Torque
Limiting
35
External
CCW Torqu
Limiting
36
DA98D User Manual
Refer to Parameter PA30.① 0~5
Since there is jamming in the process of transmitting analog
command, the command received is not necessarily 0 when the
upper machine gives the analog zero speed command, under
which circumstances the motor can not stop steadily and cause
0~1000
shake. The shake caused by jamming can be inhibited by
increasing this parameter, but the response speed will be reduced
and the processing error be increased at that same time.
Set internal CCW torque limiting for the servo motor.
The value set is the percentage of rated torque, e.g., if the value
needs to be set is two times as much as the rated torque, set the
value at 200.
At any time, this limit will be valid.
0%~300%
If the value set surpasses the maximal over-loading capacity of the
system, the actual torque limiting will be the maximal over-loading
capacity permitted by the system.
Set internal CW torque limiting for the servo motor.
The value set is the percentage of rated torque, e.g., if the value
needs to be set is two times as much as the rated torque, set the
value at -200.
At any time, this limit will be valid.
-300%~0%
If the value set surpasses the maximal over-loading capacity of the
system, the actual torque limiting will be the maximal over-loading
capacity permitted by the system.
Set external CCW torque limiting for the servo motor.
The value set is the percentage of rated torque, e.g., if the value
needs to be set is as much as the rated torque, set the value at
100.
This limiting will be valid only when the input terminal (FIL) for
CCW torque limiting is ON.
0%~300%
When the limiting is valid, the actual torque limiting will be the
minimal one among the three values of maximal over-loading
capacity, internal CCW torque limiting and external CCW torque
limiting permitted by the system.
Internal CW
Torque
Limiting
37
Torque
Limiting for
Speed Trial
38
Operation
and JOG
Operation
Set external CW torque limiting for the servo motor.
The value set is the percentage of rated torque, e.g., if the value
needs to be set is as much as the rated torque, set the value at
-100.
This limiting will be valid only when the input terminal (FIL) for CCW
torque limiting is ON.
When the limiting is valid, the actual torque limiting will be the
minimal one among the three values of maximal over-loading
capacity, internal CW torque limiting and external CW torque
limiting permitted by the system.
Set torque limiting under the modes of speed trial operation and
JOG operation.
Unrelated to rotation direction, valid for both directions.
The value set is the percentage of rated torque, e.g., if the value
needs to be set is as much as the rated torque, set the value at
-100.
Both internal and external torque limiting will still be valid.
32
-300%~0%
0%~300%
Page 44

DA98D User Manual
s
s
Acceleration
Time
Constant
39
Deceleration
Time
Constant
40
Numerator of
Output
Electronic
41
Gear Ratio
Denominator
of Output
42
Electronic
Gear Ratio
Choice of
Speed
43
Command
High Speed
44
AD Zero
Point
Low Speed
45
AD Zero
Point
Motor
Rotation
Direction
46
Control
The set value means the acceleration time of motor ranging from
0r/min to 1000r/min
The acceleration and deceleration have a linear feature.
Only valid for speed control mode, invalid for position control mode.
1ms
~10000ms
If the drive unit is used together with external position loop, thi
parameter shall be set as 0.
The set value means the deceleration time of motor ranging from
0r/min to 1000r/min
The acceleration and deceleration have a linear feature.
Only valid for speed control mode, invalid for position control mode.
1ms
~10000ms
If the drive unit is used together with external position loop, thi
parameter shall be set as 0.
Feedback pulse from each coil of the encoder will be output
through the gear within the drive unit. E.g., there are 2500 pulses in
each coil of the encoder, setting PA41/42=4/5, then the A and
0~255
B-phase signals output from the drive unit will be 2500 X
PA41/PA42=2000 pulses/coil.
This parameter must be more than or the same with parameter
No.41.
0~255
Whether the operation speed is from internal speed or analog
command:
0 Internal speed
0~1
1 Analog command
When restoring default value, this parameter will not be recovered. 412~1600
When restoring default value, this parameter will not be recovered. 412~1600
0 Normal
1 Opposite to the analog speed command
2 Opposite to the output pulse rotation direction
0~3
3 Opposite to both.
Analog
47
Command
Gain
Anti-jamming
Scope for
48
Analog
Command
Choice of
Zero
Adjustment
Channels for
49
Analog
Speed
Analog
Command
52
Transition
Mode
Analog command is transited to speed gain.
The function is the same with parameter No.33, but the function
range includes all speeds rather than zero speed only. It is
recommended that this parameter not be used simultaneously
together with parameter No.33.
0 Low speed AD for low speed and high speed AD for high speed.
1 High speed AD for both high and low speed
This parameter is used only for AD zero adjusting: to improve the
resolving power of analog command, AD switch with different
multiplying factors are employed for high and low speed. First set
this parameter as 1 to adjust zero point for high speed AD, then set
the parameter as 0 to adjust zero point for low speed AD.
0 Speed AD is transited to speed command with curve of second
order
1 Speed AD is transited to speed command with straight line.
33
20~3000
0~1000
0~1
0~1
Page 45

DA98D User Manual
53
Zero-point
Slope
When analog command AD is transited to speed command with
curve of second order, the zero-point slope for the curve is 1024
0~1023
times.
4.3 List for comparison of Modle Codes & Parameters and Motor
Table 4.3 List for Comparison of Parameter No.1 and ST Series of Servo Motors
№1
Parameter
30 110ST-M02030H,0.6kw, 300V, 3000r/min 4A, 0.33×10-3kg.m
35 110ST-M04030H,1.2kw, 300V, 3000 r/min, 5A, 0.65×10-3kg.m
36 110ST-M05030H,1.5kw, 300V, 3000 r/min, 6A, 0.82×10-3kg.m
37 110ST-M06020H,1.2kw, 300V, 2000 r/min, 6A, 1.00×10-3kg.m
38 110ST-M06030H,1.6kw, 300V, 3000 r/min, 8A, 1.00×10-3kg.m2 ※
39 130ST-M04025H,1.0kw, 300V, 2500 r/min, 4A, 0.85×10-3kg.m
45 130ST-M05025H,1.3kw, 300V, 2500 r/min, 5A, 1.06×10-3kg.m
46 130ST-M06025H,1.5kw, 300V, 2500 r/min, 6A, 1.26×10-3kg.m
47 130ST-M07720H,1.6kw, 300V, 2000 r/min, 6A, 1.58×10-3kg.m
49 130ST-M10015H,1.5kw, 300V, 1500 r/min, 6A, 2.14×10-3kg.m
50 130ST-M10025H,2.6kw, 300V, 2500 r/min, 10A, 2.14×10-3kg.m2 ※
51 130ST-M15015H,2.3kw, 300V, 1500 r/min, 9.5A, 3.24×10-3kg.m
Table 4.4 List for Comparison of Parameter No.1 and SJT Series of Servo Motors
№1
Parameter
60 110SJT-M020E,0.6kw, 300V, 3000 r/min, 3A, 0.34×10-3kg.m
61 110SJT-M040D,1.0kw, 300V, 2500 r/min, 4.5A, 0.68×10-3kg.m2
62 110SJT-M060D,1.5kw, 300V, 2500 r/min, 7A, 0.95×10-3kg.m2 ※
63 130SJT-M040D,1.0kw, 300V, 2500 r/min, 4A, 1.19×10-3kg.m2
64 130SJT-M050D,1.3kw, 300V, 2500 r/min, 5A, 1.19×10-3kg.m2
65 130SJT-M060D,1.5kw, 300V, 2500 r/min , 6A, 1.95×10-3kg.m2
66 130SJT-M075D,1.88kw, 300V, 2500 r/min, 7.5A, 1.95×10-3kg.m2 ※
67 130SJT-M100B,1.5kw, 300V, 1500 r/min, 6A, 2.42×10-3kg.m2
68 130SJT-M100D,2.5kw, 300V, 2500 r/min, 10A, 2.42×10-3kg.m2 ※
69 130SJT-M150B,2.3kw, 300V, 1500 r/min, 8.5A, 3.1×10-3kg.m2 ※
Models and Technical Parameters of Servo Motors Remarks
2
2
2
2
2
2
2
2
2
2
※
Models and Technical Parameters of Servo Motors Remarks
2
Note: The driver matched with motors marked with “ ” in the above tables shall adopt ※
thicker heat radiator.
34
Page 46

DA98D User Manual
Chapter Five Alarming and Handling
Attention
z Personnel involved in examination and repair must possess corresponding professional
knowledge and abilities.
z Do not touch driver and motor at least 5 minutes after the power has been cut off for fear of
electric shock and heat injury.
z After alarm for the failure of drive unit occurs, the unit can only put into operation after the
trouble is shot according to the alarm code.
z Do confirm that the SON (servo ready) signal is invalid before resetting the alarm for fear that
the sudden staring of motor may cause accidents.
5.1 List of Alarms
Table 5.1 List of Alarms
Alarm Codes Alarm name Contents
0 Normal
1 Excessive Speed Speed of the servo motor exceeds the set value
2 Over-voltage in Main Circuit Voltage of the main circuit power is excessive
3 Voltage Shortage in Main
Circuit
4 Position Excess Value in the position error meter surpasses the
5 Motor Overheating Excessively high motor temperature
6 Saturation Failure of Speed
Regulator
7 Abnormal Drive Stopping Both CCW and CW drive stopping are OFF.
8 Overflow of Position Error
Meter
9 Encoder Failure Encoder signal error
10 Voltage Shortage in Control
Power
11 IPM Module Failure IPM intelligent module breaks down
12 Excessive Current Excessive motor current
13 Overload Overload in servo driver and motor
14 Braking Failure Failure in braking circuit
15 Counting Error of Encoder Abnormal counting in Encoder
20 EEPROM Error EEPROM Error
30 Z Pulse Losing in Encoder Wrong Z pulse in encoder
31 UVW Signal Error in Encoder Encoder’s UVW signal is wrong or not matchable
32 Code Violation of Encoder’s
UVW Signal
Voltage of the main circuit power is too low
set value.
Long-time saturation of the speed regulator
Absolute Value of the number in the position error
meter exceeds 2
The control power of ±15V is on the low side
(instantaneous overheating)
with encoder
or all-low level exists in UVW signal
30
35
Page 47

DA98D User Manual
e
s
s
r
5.2 Methods for Handling Alarms
Table 5.2 Methods for Handling Alarms
Alarm
Code
1
2
Alarm
Name
Excessive
Speed
Overvoltage in
Main
Circuit
Operation
State
Occur when
switching on
Reasons Handling Methods
①Failure in control power board
②Encoder failure
the control
power
Excessively high input command
pulse frequency.
Excessively small acceleration/
deceleration time constant results
in overshoot.
Occur during
motor
operation
The input electronic gear ratio is
excessively high.
Encoder failure. Replace servo motor.
Bad encoder cable. Replace encoder cable.
Instable servo system cause
overshoot.
Excessively large load inertia.
Occur
immediately
after the
motor is
started
Zero-point error in encoder.
①Wrong connection of motor lead
of U, V and W.
②Wrong connection of encode
cable leads
Occur when
switching on
control
Failure in circuit board. Replace servo drive unit.
power
Occur when
switching on
main power
①Excessively high power voltage.
②Abnormal wave pattern of power
voltage.
supply
Disconnection of braking
resistance.
①Braking transistor is damaged.
②Internal braking resistance is
damaged.
Occur during
motor
operation
Insufficient capacity in the braking
return circuit.
①Replace servo driver.
②Replace servo motor.
Correctly set the input
command pulse.
Increase
acceleration/deceleration tim
constant.
Correctly set the ratio.
①Reset related gains.
②If the gains cannot be set at
a proper value, reduce inertia
rate for load rotation
①Reduce load inertia.
②Replace it with driver and
motor of greater frequency.
①Replace servo motor
②Contact the manufacturer
for readjusting the zero point.
Correct wiring.
Examine the power supply
source.
Rewiring.
Replace servo drive unit.
①Reduce start/stop frequency .
②Increase
acceleration/deceleration time
constant.
③Reduce torque limiting value.
④Reduce load inertia.
⑤Replace it with driver and
motor of greater frequency.
36
Page 48

3
e
r
3
4
Voltage
Shortage
in Main
Circuit
Voltage
Shortage
in Main
Circuit
Occur when
switching on
main power
supply
Occur during
motor
operation
Occur when
switching on
control
power
After
switching on
Position
Excess
main power
supply and
control wire,
the motor
does not
work when
inputting
command
pulse
DA98D User Manual
①Failure in circuit board.
②Power fuse is damaged.
③Failure in soft start circuit.
Replace servo drive unit.
④Damaged rectifier.
①Excessively low power voltage.
②Temporary power failure for
Examine the power supply.
more than 20mS.
①Insufficient power capacity .
②instantaneous power failure.
Heat radiator overheating.
Examine the power supply.
Examine load.
Failure in circuit board.
Replace servo driver.
①Wrong connection of motor leads
of U, V and W.
②Wrong connection of encoder
Correct wiring.
cable leads.
Encoder failure.
Set inspection range for position
excess.
Position proportion gain is too
small.
Insufficient torque.
Replace servo motor.
Extend inspection range for
position excess.
Increase the gain.
①Examine torque limiting
value.
②Reduce loading capacity.
③Replace it with drive unit and
motor of greater frequency.
Excessively high command puls
frequency.
Reduce the frequency.
Motor
5
overheating
Saturation
Failure of
6
Speed
Regulator
7
Abnormal
Drive
Stopping
switching on
control
power
Occur during
motor
operation
Occur during
motor
operation
Failure in circuit board. Replace servo drive unit. Occur when
①Cable disconnection .
②Internal temperature relay of
motor is damaged.
Motor overload.
①Examine cable.
Examine motor② .
①Reduce load.
②Reduce start/stop frequency.
③Reduce torque limiting value.
④ Reduce related gain.
⑤Replace drive unit and moto
of greater frequency.
Internal failure in motor. ① Replace servo motor.
Motor gets stuck by the machinery. Examine machinery part of the
load.
Overload. ①Reduce load.
②Replace it with drive unit and
motor of greater frequency.
Disconnection of CCW and CW
drive stopping input terminal.
Examine the wire connection
and power of the input
terminal.
37
Page 49

DA98D User Manual
8
9
9
10
11
Overflow
of
Position
Error
Meter
Encoder
failure
Encoder
Failure
Voltage
Shortage
in Control
Power
Encoder
Failure
Occur when
switching on
control
power
Occur during
motor
operation
The mot① or get stuck by the
machinery.
Abnormal input command pulse.②
Examine the machinery part ①
of the load.
②Examine command pulse.
.③ Examine whether the motor
works after receiving command
pulse
Wrong connection of encoder. Examine wire connection.
Damaged encoder. Replace motor.
Bad encoder cable. Replace cable.
Excessively long encoder cable
results in low power voltage of
encoder.
Shorten cable.①
Supply power with multiple ②
core wires connected in
parallel.
Low input control power. Examine control power.
①Internal connectors of driver
have bad performance.
Abnormal switch power.②
Damaged chip.③
Replace ① drive unit.
Examine connector.②
Examine switch power.③
Failure in circuit board. Replace servo drive unit.
①Excessively low power voltage.
②Overheating.
Short circuit between motor leads
of U, V and W.
Examine ① drive unit.
②Re-electrify.
③Replace drive unit.
Examine wire connection.
Bad ground contact. Correct ground contact.
Excessive
12
Current
13 Overload
motor
operation
Occur when
switching on
control
power
Occur during
Damaged motor insulation. Replace motor.
①Add circuit filter.
Be jammed.
②Keep away from jamming
source
Short circuit between motor leads
of U, V and W.
Examine wire connection.
Bad ground contact. Correct ground contact.
Damaged motor insulation. Replace motor.
Damaged driver. Replace drive unit.
Failure in circuit board. Replace servo drive unit.
①Examine load.
Operation by exceeding rated
torque.
②Reduce start/stop frequency.
Reduce torque limiting value.
Replace it with drive unit and
motor of greater frequency
Hold brake cannot be opened. Examine the hold brake.
①Increase gain.
Instable motor with vibration.
②Increase
acceleration/deceleration time.
③reduce load inertia.
38
Page 50

14
e
r
14
Braking
failure
Braking
failure
DA98D User Manual
Occur when
switching on
control
power
Occur during
motor
operation
Occur during
motor
operation
①One phase of U, V and W is
disconnected.
Examine wire connection.
②Wrong connection of encoder.
Failure in circuit board. Replace servo drive unit.
Disconnection of brake resistance. Re-wiring.
①Damaged brake transistor.
②Internal brake resistance is
Replace servo drive unit.
damaged.
①Reduce stop/start frequency.
②Reduce
Insufficient capacity in the brak
loop.
acceleration/deceleration time.
③Reduce torque limiting value.
④Reduce load inertia.
⑤Replace drive unit and moto
of greater frequency.
15
20
30
31
Counting
Error of
Encoder
EEPROM
Error
Z Pulse
Losing in
Encoder
UVW
Signal
Error in
Encoder
Excessively high main
circuit power voltage.
Damaged encoder. Replace motor.
Wrong connection of encoder. Examine wire connection.
Bad ground contact. Correct ground contact.
Damaged chip or circuit board.
Z pulse does not exist; damaged
encoder
Bad cable
Bad cable shielding
Bad connection between shielded
wire and shielding layer
Failure in encoder’s interface
circuit
Damaged UVW signal of encoder
Damaged Z signal of encoder
Bad cable
Bad cable shielding
Bad connection between shielded
wire and shielding layer
Failure in encoder’s interface
circuit
Examine main circuit.
Replace servo drive unit.
.After repair, first reset driver
model (parameter No.1), then
restore default parameter
value.
Replace encoder
Examine encoder’s interface
circuit
Replace encoder
Examine encoder interface
circuit
Code
Violation
of
32
Encoder’s
UVW
Signal
Damaged UVW signal of encoder
Bad cable
Bad cable shielding
Bad connection between shielded
wire and shielding layer
Failure in encoder’s interface
circuit
39
Replace encoder
Examine encoder interface
circuit
Page 51

DA98D User Manual
Chapter Six Display and Operation
6.1 Keyboard Operation
z The panel of drive unit is composed of six-phase LED nixie tube display and four keys
of
specific functions of the keys are as follows :
, which are used to display states of drive units and set parameters. The
: Increase serial number and value or forward operation.
: Decrease serial number and value or backward operation.
: Return to the preceding layer of men or cancel the operation.
: Enter the next layer of menu or confirm the input.
Note: Press down or and hold on, the operation will be repeated. The longer the key is kept being
pressed down, the faster the repetition frequency will be. .
z The six-phase LED nixie tube display can show various states and data about the system. If
decimal point of all the nixie tubes or the nixie tube on the fastest right side keeps flashing, it
means alarm.
z Operation is conducted according to multi-layer menu, in which the first layer is the main menu,
including eight operation modes; the second layer is functional menu to the operation mode
under first layer. Fig. 6.1 is a block chart for operations in the main menu, as shown in the
following:
First Layer
Fig. 6.1 Block Chart for Operation Mode Selection
40
Page 52

DA98D User Manual
6.2 Ways of Monitoring
Select “dP-” In the first layer and press down , then you will enter the ways of monitoring, in
which there are 21 display states. Use
to enter the specific display state.
and to select the display mode, then press down
Fig. 6.2 Operation Chart for Ways of Monitoring
Note 1: Position and command pulse are both values multiplied by input electronic
gear.
Note 2: Pulse unit is the internal pulse unit of the system, where it means 100,000
pulses/round. The pulse is expressed by value higher by 5 plus value lower by
5. The calculation method is: Pulse=(value higher by 5)×100,000 + value lower
41
Page 53

DA98D User Manual
by 5.
Note 3:Control mode: 0---position control; 2---speed control;3---speed trial operation;
3---JOG operation;4---encoder zero adjusting;5---open-loop operation.
Note 4:If the displayed number reach 6 digits (like 123456), the hint characters will not
be shown.
Note 5:Position command pulse frequency is the actual pulse frequency before being
multiplied by the input electronic gear, with a minimal unit of 0.1kHz.
Forward-direction display stands for positive number and reverse-position
display for negative number.
Note 6:The calculation method for motor current I is :
2
3
222
)(
IIII ++=
WVU
Note 7:Absolute position of rotor during one round stands for the position of rotor in
relative to stator during the round. One round is taken as a cycle, ranging from 0
to 9999.
Note 8:Input terminal is shown in Fig. 6.3; the output terminal is shown in Fig. 6.4; and
encoder signal is shown in Fig. 6.5
Fig. 6.3 Input Terminal Display (dot shining means ON and stop shining means OFF)
Fig. 6.4 Output Terminal Display (dot shining means ON and stop shining means OFF)
Fig. 6.5 Encoder Signal Display (dot shining means ON and stop shining means OFF)
Note 1:Operation states are expressed as:
42
Page 54

DA98D User Manual
“cn- oFF” : The main circuit is not discharged and the servo system does
not work;
“cn- CH” : The main circuit is charged but the servo system does not work
( the servo is not on or alarm occurs);
“cn- on” : The main circuit is charged and the servo system is under
operation,
Note 2: Linear velocity only displays 4 digits.
6.3 Parameter Setting
Attention
z Only after No.0 parameter is set as the corresponding value can other parameters be
changed.
z Except No.1 parameter, the parameter will take effect immediately after it is set. Wrong
parameter setting may cause wrong operation of the equipment, which will result in
accidents.
Select “PA-” in the first layer, then press down
and
changed by using
or decreased by 1; press down
to select serial number of the parameter and enter to display the value, which can be
and . Click or for one time, the parameter value will be increased
or and hold on, the parameter value will be increased or
to enter the parameter setting mode. Use
decreased continuously. When the parameter is changed, the decimal point on LED nixie tube at the
furthest right side will shine, then press down
to confirm the validity of the parameter changed
and the decimal point will stop shining. The changed parameter value will be immediately reflected
in the control operation. Use
or to go on with parameter changing, after which click down
to return to the parameter selecting mode. If you are not satisfied with the changed parameter
value, do not press down
for confirmation but use to cancel the parameter changing
operation, restore the original value and return to the parameter selecting mode.
Fig. 6.6 Operation Chart for Parameter Setting
43
Page 55

DA98D User Manual
6.4 Parameter Management
Attention
parameter, the value will not be stored and the change will go invalid after power off.
Parameter management mainly involves operations between memory and EEPROM. Select
If the writing-in operation fails to be implemented to the changed
“EE-” in the first layer and press down
an operation mode in the five modes with
example, first select “EE-Set”, then press down
operation is successful, “FInISH” will be shown on the display; if it fails, “Error” will appear on the
display. Re-press down
z EE-SEt Write in parameter, i.e., write the parameter in the memory into the parameter area
of EEPROM. When the user changes the parameter, it is only the parameter in the memory
that is changed, and the parameter value will be restored after the power is switched on the
next time. If you want to permanently change the parameter value, you have to implement
the writing in operation, by which means you can write the parameter in the memory into the
parameter area of EEPROM and you can use the changed parameter after power is
switched on the next time.
to return to the operation mode selecting state.
to enter the parameter management mode. First select
and . Take “parameter writing-in”operation for
and hold on for at least 3 seconds. If the
z EE - rd Read parameter, i.e. the parameter will be red into the memory from the
parameter area of EEPROM. This process will be automatically implemented after the
power is switched on. In the beginning, the parameter value in the memory is the same with
that in the parameter area of EEPROM. But after the user changes the parameter, the value
in the memory will be changed; when the user is not satisfied with the changed parameter or
the parameter is adjusted in a disorderly way, the parameter reading operation can be
implemented for reading the data in the parameter area of EEPROM back into the memory
and restoring the parameter value at the power-on time.
z EE-bA Back up parameter, i.e., write the parameter in the memory into the backup area of
EEPROM. The whole EEPROM is divided into parameter area and backup area. System
electrifying, parameter writing in and parameter reading operations all use parameter area
of EEPROM, while parameter and recovery backup use the backup area of EEPROM. In the
process of parameter setting, if the user is relatively satisfied with a set of parameters but
want to make further changes, he or she can first implement the recovery backup operation,
by which means the parameters in the memory will be stored in the backup area of
EEPROM, then change the parameters. If the effect is not so good, the user can implement
the recovery backup operation, in which way the parameters stored in the backup area of
EEPROM will be red back into the memory. Then the user can continue with the revision or
choose to stop. In addition, after the parameter is set, the user can implement the two
operations of parameter writing in and parameter backup to render data in the parameter
area and backup area identical with each other; so in case that the parameter is
inadvertently changed, the recovery backup operation can be conducted to read the data in
the backup area of EEPROM into the memory and then the parameter reading operation
can be carried out to write the parameter in the memory into the parameter area of
EEPROM.
44
Page 56

DA98D User Manual
z EE-rS Recovery backup, i.e., read data in the recovery area of EEPROM into the memory.
What needs to be noted is that the parameter writing in operation is not implemented in this
operation, so it is still the data in the parameter area of EEPROM that is red into the memory.
If the user wants to permanently use the parameter in the backup area of EEPROM, he or
she can conduct the parameter writing in operation.
z EE-dEF Restore default value, i.e., all the default parameter values (factory values) will
first be red into the memory and then written into the parameter area of EEPROM, thus the
default parameter value will be used after the power is switched on the next time. When the
user adjusts the parameter in a disorderly way and the system cannot work, he or she can
implement this operation to restore all the parameters back to the factory leaving conditions.
Since different driver models correspond to different default parameter values, the driver
models must be ensured to be correct when restoring the default parameters.
Fig. 6.7 Operation Chart for Parameter Management
Fig. 6.8 Operation Meaning for Parameter Management
Attention
● It is recommended that speed trial operation and JOG operation should be conducted when the
motor does not have load for preventing equipment accidents.
● During the trial operation, the driver SON should be valid while CCW and CW drive stopping
should be invalid.
6.5 Speed Trial Operation
Select “Sr-” in the first layer and click to enter the trial operation mode. The hint character
45
Page 57

DA98D User Manual
for speed trail operation is “S” and the value unit is r/min. When the system is under speed control
mode, the speed command will be provided by the keys. The speed command can be changed by
or and the motor will run at the given speed. is used to increase the speed in positive
direction and
to decrease the speed in positive direction (increase in the negative direction).
When the speed is a positive value, the motor will rotate in positive direction; when the speed is a
negative value, the motor will rotate in negative direction.
↑
S 800
Fig.6.9 Speed Trial Operation Chart
↓
6.6 JOG Operation
Select “Jr-” in the first layer and click to enter the JOG operation mode, i.e. itching mode.
The hint character for JOG operation is “J” and the value unit is r/min. When the system is under
speed control mode, the speed command will be provides by keys. After entering the JOG operation,
press down
will stop and keep zero speed. Press down
and hold on, then the motor will run at the JOG speed; release the key, the motor
and hold on, the motor will run in the reserve
direction; release the key, the motor will stop and keep zero speed. JOG speed is set through No.21
parameter.
↑
J 120
Fig. 6.10 JOG Operation Chart
↓
6.7 Others
The function of automatic gain adjustment is under development and cannot be provided
temporarily.
The function of encoder zero adjusting is used by the motor manufacturer, so the user shall not use
it.
Open-loop operation mode is used by the motor manufacturer, so the user shall not use it.
46
Page 58

DA98D User Manual
Chapter Seven Operation by Switching on Power
Attention
z The drive unit and motor must have reliable ground contact; PE terminal must be safely
connected with the grounding terminal of equipment.
z It is recommended that the power should be supplied through isolating transformer and
power filter for the purpose of ensuring safety and anti-jamming abilities.
z Only after examining and confirming that the wire is connected correctly can the power be
switched on.
z An emergency stop circuit must be coupled in to ensure that the power can be immediately
cut off in case of failure (see Fig. 7.1).
z After the alarm for failure in drivin unit occurs, confirm that the trouble has been shot and that
the SON signal is invalid before restarting the system.
z Do not touch the drive unit and motor at least 5 minutes after the power is off for fear of
electric shock.
z After some time of operation, the drive unit and motor may have a relatively high
temperature. Be careful not be burned.
7.1 Power Supply Connecting
Refer to Fig. 7.1 for power supply connecting and connect the power supply according to the
following order:
1) Connect the power supply with input terminal of main circuit power (the three phases are
connected with R, S and T; and the single phase is connected with R and S) through
electromagnetic contactor.
2) Power supply r and t in the control circuit shall be connected at the same time with or prior
to main circuit power. If only the control power is connected, the servo ready signal (SRDY)
will be OFF.
3) After the main circuit power is connected, the servo ready signal (SDRY) will be ON with a
time delay of 1.5 seconds, then the servo on signal (SON) can be received. After detecting
validity of the servo on signal, the driver output will be valid, and the motor will be activated
and under the operation state; when detecting invalidity of the servo on signal or alarm, the
base electrode circuit will be closed and the motor will be under free state.
4) When servo on is connected with the power supply, the base electrode circuit will be
connected after 1.5 seconds or so.
5) A frequent connection of the cut-off circuit may damage the soft start circuit and consume
energy of the brake circuit. The connection frequency shall be best limited to less than 5
times per hours and 30 times per day. After the trouble for overheating in the drive unit or
motor has been shot, the power can only be switched on after 30 minutes of cooling down.
47
Page 59

DA98D User Manual
Fig. 7.1 Power Supply Connecting
Time sequence for Power Supply Connecting and Alarming:
Fig. 7.2 Time sequence for Power Supply Connecting
Fig. 7.3 Time sequence for Alarming
48
Page 60

DA98D User Manual
7.2 Trial Operation
1) Pre-operation Examination
After installment and wiring have been completed, the following items shall be examined
before switching on the power:
z Whether the wiring and reliable input voltage are correct in the power supply terminal
TB.
z Whether the power supply wire and motor wire have short circuit or ground contact.
z Whether the encoder cable has correction wiring.
z Whether the wiring, power supply electrode and voltage are correction in the control
signal terminal.
z Whether the drive unit and motor have been firmly installed.
z Whether the motor shaft is connected with load.
2) Trail Operation by Switching on Power
(1) Trail Operation
①Connect CN1 and set the input control signals as: servo on (SON) OFF, CCW drive
stopping (FSTP) ON, CW drive stopping (RSTP) ON.
② Switch on control circuit power (temporarily not switching on the main circuit power) and
the point on the display of the drive unit will shine. If alarm occurs, examine the wiring.
③Set the control mode (parameter No.4) as speed trail operation mode (set as 2).
④Switch on the main circuit power.
Render servo on (SON) ON after confirming that there is no alarm or any other abnormal
④
condition, then the motor will be activated and under the state of zero speed.
⑥Enter the speed trial operation mode through key operation. The hint character for speed
trial operation is “S” and the value unit is r/min. When the system is under the speed
control mode, the speed command will be provided by the keys. The speed command
can be changed by
or and the motor will run at the given speed.
(2) JOG (Itching) Operation
① Connect CN1 and set the input control signals as: servo on (SON) OFF, CCW drive
stopping (FSTP) ON, CW drive stopping (RSTP) ON.
② Switch on control circuit power (temporarily not switching on the main circuit power) and
the point on the display of the drive unit will shine. If alarm occurs, examine the wiring.
Set the control mode (parameter No.4) as JOG operation mode (set as 3).
③
Switch on the main circuit power..
④
⑤Render servo on (SON) ON after confirming that there is no alarm or any other abnormal
condition, then the motor will be activated and under the state of zero speed.
Enter the speed trial operation mode through key operation. The hint character for speed
⑥
trial operation is “J” and the value unit is r/min. When the system is under the speed
control mode, the speed value and direction will be determined by the keys. With
the motor will run at the speed and direction determined by parameter No.21; with
the motor will run in the reserve direction at the given speed.
(3) Operation under Position Control Mode
Connect CN1 and set the input control signals as: servo on (SON) OFF, CCW drive
①
stopping (FSTP) ON, CW drive stopping (RSTP) ON.
Switch on control circuit power (temporarily not switching on the main circuit power) and
②
,
,
49
Page 61

DA98D User Manual
the point on the display of the drive unit will shine. If alarm occurs, examine the wiring.
③Set the control mode (parameter No.4) as position operation mode (set as 0). According
to the way of inputting signals by controller, the user shall set parameter No.14 and
proper electronic gear ratio (No.12 and No.13).
④ Switch on the main circuit power.
Render servo on (SON) ON after confirming that there is no alarm or any other abnormal
⑤
condition, then the motor will be activated and under the state of zero speed.
The output signal of operation position controller is transmitted to the driving foot of
⑥
CN1-6, 18, 7 and 19, and the motor will run according to the command.
(4) Operation under Speed Control Mode
The speed operation mode can be divided into external speed control by analog voltage and
internal speed control.
External Speed Control by Analog Voltage
① Connect CN1 and set the input control signals as: servo on (SON) OFF, CCW drive
stopping (FSTP) ON, CW drive stopping (RSTP) ON.
② Switch on control circuit power (temporarily not switching on the main circuit power) and
the point on the display of the drive unit will shine. If alarm occurs, examine the wiring.
③ Set the control mode (parameter No.4) as speed operation mode (set as 1), and set the
PA43 parameter as 1.
④ Switch on the main circuit power.
⑤ Render servo on (SON) ON after confirming that there is no alarm or any other abnormal
condition, then the motor will be activated and under the operation state of external
control speed by analog voltage.
Analog speed zero adjusting:
1) Set PA49 parameter as 1;
2) Switch display to “DP-SPD”;
3) Observe current rotation rate: if it rotates in the positive direction, regulate
PA44 value toward the higher side; if the it rotates in the reverse direction,
regulate the PA44 value towards the lower side until the rotation rate
reads “R-0”;
4) Set PA49 parameter value as 0;
5) Switch display to “DP-POS”;
6) Observe current position: if it increases, regulate PA35 value towards the
higher side; if it decreases, regulate PA45 value towards the lower side unit
the position value stands still.
⑥ The motor rotation rate can be changed by adjusting external analog voltage and the
motor rotation direction can be changed by adjusting direction of the analogy voltage.
Note: Under speed control mode, even when it, as the analog command voltage, gives
0V command, the motor will rotate at a minute speed. Then the zero point of the
amplifier shall be adjusted.
Internal Speed Control:
(1) Connect CN1 and set the input control signals as: servo on (SON), speed choice 1 (SC1)
and speed Choice2 (SC2) OFF, CCW drive stopping (FSTP) ON, CW drive stopping
(RSTP) ON.
50
Page 62

DA98D User Manual
(2) Switch on control circuit power (temporarily not switching on the main circuit power) and
the point on the display of the drive unit will shine. If alarm occurs, examine the wiring.
(3) Set the control mode (parameter No.4) as speed operation mode (set as 2) and set PA43
parameter as 0. Set parameter No.24~27 according to needs.
(4) Switch on the main circuit power.
(5) Render servo on (SON) ON after confirming that there is no alarm or any other abnormal
condition, then the motor will be activated and under the operation state of internal speed
1.
(6) Change the states of input signal SC1 and SC2 to make the motor rotate at the given
speed.
7.3 Adjustment
Attention
z Wrong parameter setting may cause equipment failure or accidents. Confirm validity
of parameter setting before starting the system.
z It is recommended to no-load commissioning should be conducted before
commissioning with load.
1) Adjustment in Basic Gains
(1) Speed Control
① The value speed proportion gain (parameter No.5) should be set as large as possible
under the precondition that no vibration will be caused. Generally, the greater the load
inertia is, the larger the value of speed proportion gain shall be set.
② The value of speed integral time constant (parameter No.6) shall be set as low as possible
according to the given conditions. If the value of speed integral time constant is set too low,
the response speed will be improved but it is also easy to cause vibration. So under the
precondition that no vibration will be caused, the value shall be set as low as possible. For
if the value is too high, the speed will have a great change when the load is changed.
(2) Position Control
① Set proper speed proportion gain and speed integral time constant according to the
above-motioned methods.
② Set position feed-forward gain (parameter NO.10) as 0%.
③ Within the range of stability, the value of position proportion gain (parameter No.9) shall be
set as large as possible. If the value of position proportion gain is set too high, the position
command will be easily traced and have small lag error, but it is prone to cause vibration
when it stops positioning.
④ If an extremely high performance in position tracing is required, the value of position
feed-forward gain can be increased. But if the value is set too high, it may cause
over-adjustment.
Note: When the value of position proportion gain is relatively low, the system will be
stable, but the position tracing performance will be impaired and the lag error
increased.
2) Chart for Adjustment in Basic Parameters
51
Page 63

Positi on command
Δ
t
Δ
Pulse input
form
No.12
No.13No.14
Electronic
gear
No.47
DA98D User Manual
Feed-
forward
Feedforward
+
-
low pass
filter
No.9
Position
proportional
gain
No.43
+
-
No.4
No.40
No.41
Acceleration
/deceleration
time
+
-
Speed
calculation
No.5
Time
constant
of speed
proportional
gain integral
No.64No.6
Current
command
low pass
filter
Four times
frequency
No.60
No.61
Time
constant
of current
+
proportional
gain integral
-
PG
External analog
voltage
Analog speed
command gain
Fig. 7.4 Chart for Adjustment in Basic Parameters
3) Position Resolution and Electronic Gear Position
Position resolution (one pulse itinerary l△ ) is determined by itinerary per round of servo
motor S and feedback pulse per round of encoder Pt△ , as expressed in the following calculation
formula:
S
l=△
Pt
In which,
l△ : one pulse itinerary (mm);
S:△ one pulse itinerary (mm/round);
Pt: feedback pulse per round of encoder (pulses/round).
Since there is a four-time frequency circuit in the system, Pt=4×C, in which C is the line
number per round of encoder. In this system, C=2500 lines/round, so Pt=10000
pulses/round.
Command pulse can be converted into position control pulse after being multiplied by
electronic gear ratio G, so one command pulse itinerary l△ ﹡is expressed as:
S
l*=△
×G
P
numeratordivision frequency pulse Command
In which, G=
rdenominatodivision frequency pulse Command
52
Page 64

DA98D User Manual
Chapter Eight Product Specifications
● Servo drive unit must be selected to match the servo motor. This manual describes matched
specifications on GKS SJT series and ST series of products.
● Servo motor description. The user shall make a clear indication in the order if he or she needs to
select servo motor of other manufacturers.
Attention
8.1 Driver Specifications
Table 8.1 Servo Driver Specifications
Output Power(kW) 0.4~0.8 1.0~1.5 1.7~2.3
Rated Torque of
Motor (Nm)
Input Voltage Three Phases or Single Phase
AC220V
Operation
Environment
Temperature Operaton:0℃~55 ℃ Storage:-20℃~80℃
Humidity Less than 90%(no dew condensation)
Vibration Less than 0.5G(4.9m/S2),10~60 Hz(non-continuous operation)
-15%~+10% 50 Hz /60Hz
2~4 4~10 6~15
Three-phase AC220V
-15%~+10% 50 Hz /60Hz
Control Mode ①Position Control ②Speed Control ③Speed Trial Operation JOG④ Operation
⑤Open-loop Operation
Regenerative Brake Built in
Features
Speed Frequency Response:200Hz or more
Control
Speed Wave Frequency: < ±0.03(load 0~ 100%): <±0.02(power supply-15% ~ +10%)(the
value shall correspond to rated velocity)
Speed Ratio:1:5000
Pulse Frequency:≤500kHz
①Servo on; ②Alarm Clearance ; CCW③ Drive Stopping; CW④ Drive
Control Input
Control Output
Position Control
Speed Control
Stopping;⑤Error Meter Clearance/Speed Choice1;⑥Command Pulse
Inhibiting/Speed Choice2; CCW⑦ Torque Limiting; CW⑧ Torque Limiting.
①Servo Ready for Output;②Servo Alarm Output;③Positioning Completing
Output/Speed Completing Output.④ Hold Output
Input
Forms
Electronic
Gear Ratio
Feedback
Pulse
1) Analog Speed Control Mode: +-10V Voltage; Input Impedance 20K
2) Electronic Gear Ratio: 1-1/255
①Pulse+Symbol; CCW② Pulse/CW Pulse;
1~32767/1~32767
10000 Pulses/Round
53
Page 65

DA98D User Manual
(
)
Four Types of Internal Speeds
Acceleration/Decele
ration Function
Monitoring
Function
Parameter setting for acceleration/deceleration time 1 ms ~
10000ms(0r/min←→1000r/min)
Rotation rate, current position, command pulse accumulation, position error,
motor torque, motor current, linear velocity, absolute position of rotor, command
pulse frequency, operation state, input/output terminal signal and etc.
Protection Function Excessive speed, voltage shortage in main power supply, over-current,
overload, abnormal brake, abnormal encoder, abnormal control power, position
excess and etc.
Display and
6-phase LED nixie tube, 4 keys
Operation
Applicable load
Less than 5 times of motor inertia
inertia
Dimension 240 mm×177.5 mm×90mm(see figuration drawing)
8.2 Servo Motor Specifications
1) Product Introduction
GSK SJT series of three-phase AC permanent-magnet synchronous servo motors has the
following technical features:
◆ Adopt new rare-earth materials, with great output power.
◆ Good low-speed performance, with speed ratio>1:10000.
◆ High dielectric strength and insulation resistance for safe operation.
◆ Powerful overlaod capacity: torque can reach 8 times of rated torque in an instant.
2) Terminal Explanation
(1) SJT Series of Motor Winding
U,V,W,PE terminal.The three winding phases of U, V and W of motor and the rack earth
are led out through a 4-core connector. The corresponding relationships are shown in
Table 8.2. U, V, W and rack earth are respectively connected with terminal U, V, W and
PE of the main return circuit.
U
Lead Wire
W V
The lead wires of photoelectric encoder are led out through a 15-core connector. The
corresponding relationships are shown in Table 8.2. The lead wires shall be connected
with plugs of the driver feedback signals CN2 according to driver requirements.
Table 8.2 Motor Wiring
Motor
Socket
No.
U V W
2 3 4 1
Rack
(Earth)
1
3
2
4
Diagram for Plugs
wire welding area
54
Page 66

DA98D User Manual
f
A
Table 8.3 Encoder Wiring
Lead Wires of
Encoder
Socket No. 1 2 3 4 7 5 8 6
Lead Wires of
Encoder
Plug No. 9 10 13 11 14 12 15
Rack (Earth) V
Z U
CC
GND A
U
V
A
V
B
W
B
W
(2)ST Series of Motor Winding
Schematic diagram for motor winding is shown as follows:
A, B and C are lead-out terminals of winding.
Lead-out way: 4-core socket.
Table 8.4 Motor Wiring
Socket No. 2 3 4
Motor
Winding
Remark
Lead-out way of photoelectric encoder:15-core socket.
Table 8.5 Encoder Wiring
A B C
One foot has ground
contact (rack)
Z
Marks 2 3 4 7 5 8 6 9 10 13 11 14 12 15
Lead-out foot
Remark GND is one foot (rack) of the encoder power Vcc that has ground contact
(3) Specifications
Models
110SJT-M020E 0.6 4 2 3000 3.0 3.4×10-4 52 220(300)
110SJT-M040D 1.0 4 4 2500 4.5 6.8×10-4 45 220(300)
110SJT-M060D 1.5 4 6 2500 7.0 9.5×10-4 42 220(300)
130SJT-M040D 1.0 4 4 2500 4.0 1.19×10-3 80 220(300)
130SJT-M050D 1.3
130SJT-M060D 1.5 4 6 2500 6.0 1.95×10-3 82 220(300)
130SJT-M075D 1.88 4 7.5 2500 7.5 1.95×10-3 66 220(300)
130SJT-M100B 1.5 4 10 1500 6.0 2.42×10-3 38 220(300)
130SJT-M100D 2.5 4 10 2500 10.0 2.42×10-3 63 220(300)
130SJT-M150B 2.3 4 15 1500 8.5 3.1×10-3 33 220(300)
V
GND A
CC
Table 8.8 Specifications on SJT Series of Some Motors
Power(kw)
Paris o
Electrodes
4
A
Rated
Torque(N.m)
5 2500 5.0 1.19×10-3 64 220(300)
B
B
Z
Rated
Rotation
Z
Rated
Current
U
U
Rotor
Inertia
V
V
cceleration
Time
W
W
Operating
Voltage
130SJT-M150D 3.9 4 15 2500 14.5 3.6×10-3 63 220(300)
Note: The user shall make a special indication if he or she wants to order motor with
55
Page 67

DA98D User Manual
0
0
electricity-losing brake.
Table 8.9 Specifications on ST Series of Some Motors
Models
Power
(kw)
Zero
Speed
Rated
Rotation
Rated
Current
Rotor
Inertia
110ST-M02030H 0.6 2 3000 4.0 0.33×10
110ST-M04030H 1.2 4 3000 7.5(5.0) 0.65×10
110ST-M05030H 1.5 5 3000 9.5(6.0) 0.82×10
110ST-M06020H 1.2 6 2000 8.0(6.0) 1.00×10
110ST-M06030H 1.8 6 3000 11.0(8.0) 1.00×10
130ST-M04025H 1.0 4 2500 6.5(4.0) 0.85×10
130ST-M05025H 1.3 5 2500 6.5(5.0) 1.06×10
130ST-M06025H 1.5 6 2500 8.0(6.0) 1.26×10
130ST-M07720H 1.6 7.7 2000 9.0(6.0) 1.58×10
130ST-M10015H 1.5 10 1500 9.0(6.0) 2.14×10
130ST-M10025H 2.6 10 2500 14.5(10.0) 2.14×10
130ST-M15015H 2.3 15 1500 13.5(9.5) 3.24×10
Machinery
-3
-3
-3
-3
-3
-3
-3
-3
-3
-3
-3
-3
Time
Operating
Voltage
Weight
(kg)
3.64 220(300) 4.2
2.32 220(300) 5.2
2.03 220(300) 5.8
1.82 220(300) 6.4
1.82 220(300)
6.4
3.75 220(300) 7.4
3.07 220(300) 7.9
2.83 220(300) 8.6
2.44 220(300) 9.5
2.11 220(300) 11.1
2.11 220(300) 11.1
1.88 220(300) 14.3
Note 1: The value within the bracket in the column of rated current is the rated current
under high voltage
Note 2: The user shall make a special indication if he or she wants to order motor with
electricity-losing brake
3) Figuration Dimension
(1) Figuration and installment dimension for SJT series of 110-stand model AC servo
motors
Specifications D(mm) N(mm) LB(mm) L(mm)
110SJT—M020E 19
-0.013
56
95
-0.035
156(207) 211(262)
Page 68

DA98D User Manual
0
0
0
0
110SJT—M040D 19
110SJT—M060D 19
95
-0.013
95
-0.013
186(237) 241(292)
-0.035
212(263) 267(318)
-0.035
Note: The LB and L value in the bracket is the length of motor with electricity-losing brake of the
corresponding specifications.
(2) Figuration and installment dimension for SJT series of 130-stand model AC servo
motors
Specifications D(mm) N(mm) LB(mm) L(mm)
130SJT—M040D 22
130SJT—M050D 22
130SJT—M060D 22
130SJT—M075D 22
130SJT—M100B 22
130SJT—M100D 22
130SJT—M150B 22
130SJT—M150D 22
Note: The LB and L value in the bracket is the length of motor with electricity-losing brake of
the corresponding specifications.
(3) Figuration Drawing for DST series of 110-stand model AC servo motors
0
-0.013
0
110
-0.013
0
110
-0.013
0
110
-0.013
0
110
-0.013
0
110
-0.013
0
110
-0.013
0
110
-0.013
110
0
-0.035
0
168(227) 225(284)
-0.035
0
190(249) 247(306)
-0.035
0
190(249) 247(306)
-0.035
0
208(267) 265(324)
-0.035
0
208(267) 265(324)
-0.035
0
238(297) 295(354)
-0.035
0
248(307) 305(364)
-0.035
168(227) 225(284)
57
Page 69

DA98D User Manual
Zero-speed Torque (Nm) 2 4 5 6
A(mm) 106 132 148 164
B(mm) 158(205) 184(231) 200(247) 216(263)
C(mm) 76 102 118 134
Note: The B value in the bracket is the length of motor with electricity-losing brake.
(4) Figuration Drawing for DST series of 130-stand model AC servo motors
Zero-speed
Torque (Nm)
A(mm) 110 119 128 142 166 214
B(mm) 162(209) 171(218) 180(227) 194(241) 218(265) 266(313)
C(mm) 80 89 98 112 136 184
Note: The B value in the bracket is the length of motor with the electricity-losing brake.
4 5 6 7.7 10 15
58
Page 70

DA98D User Manual
8.3 Isolating Transformer
Attention
z It is recommended that the power of drive unit is supplied by isolating transformer for
reducing the possibility of electric shock and jamming by power supply and electromagnetic
field.
z Drive units of 0.8kW and below can adopt single-phase power supply while drive units of
more than 0.8kW can adopt three-phase power supply.
We provide the following several models of transformers for the user to select. The user can
make a choice by referring to the power and actual load of servo motor.
Table 8.5 Specifications on Some Isolating Transformers
Models Capacity (kVA)
Phase
Number
BS—120 1.2
BS—200 2.0
Three
BS—300 3.0
BD—80 0.8
Single
BD—120 1.2
Input Voltage (V)
380 220
Output Voltage
(V)
59
Page 71

DA98D User Manual
Installation Dimension Drawing for BS—120 Model
60
Page 72

DA98D User Manual
Installment Dimension Drawing for BS—200 Model
61
Page 73

DA98D User Manual
Installment Dimension Drawing for BS—300 Model
62
Page 74

DA98D User Manual
Installment Dimension Drawing for BD—80 Model
63
Page 75

DA98D User Manual
Installment Dimension Drawing for BD—120 Model
64
Page 76

DA98D User Manual
Chapter Nine Order Instructions
9.1 Capacity Selecting
The determination of capacity of the servo system must comprehensively consider factors like
load inertia, load torque, required positioning precision and maximal speed. The following
steps are recommended for the considerations:
1) Calculating Load Inertia and Torque
By referring to related data, make a calculation on load inertia, load torque,
acceleration/deceleration torque and effective torque, which will serve as the basis for
choice at the next step.
2) Initial Determination of Machinery Gear Ratio
According to the required maximal speed and rotation rate of motor, make a calculation
on the maximal machinery deceleration ration. This ratio and the minimal gyration unit of
motor will be used to calculate whether the requirement for minimal position unit is
satisfied. If a relatively high position precision is required, increase the machinery
deceleration ratio (the actual maximal speed is decreased) or choose motor with higher
rotation rate.
3) Calculating Inertia and Torque
The load inertia and torque can be converted to the motor shaft with machinery
deceleration ratio. The converted inertial shall be no more than 5 times of the inertia of
the motor rotor and the converted load torque and effective torque shall be not higher
than the rated torque of motor. If these requirements cannot be satisfied, increase
machinery ratio (the actual maximal speed is decreased) or choose motor with greater
capacity.
9.2 Electronic Gear Ratio
Refer to Chapter Four (Table 4.2 Functions of Parameters), Chapter Six (Parameter Setting)
and Chapter Seven (7.3 Adjustment) for the meaning and adjustment of electronic gear ratio
G.
Under position control mode, the actual speed of load is:
command pulse speed×G×machinery deceleration ratio.
Under position control model, the actual minimal displacement of load is:
minimal command pulse itinerary×G×machinery deceleration ratio.
Note: When the electronic gear ratio G is not 1, the dividing operation of G may have a
65
Page 77

DA98D User Manual
Z
T
δ
remainder, which means that position errors exist. The maximal error is the minimal
rotation value (minimal resolution) of the motor.
9.3 Stop Features
Under position control mode, there will be a difference between the command pulse and
feedback pulse when using pulse train to control the servo motor. This difference will be
accumulated in the position error meter and form the following relationships with the
command pulse frequency, electronic gear ratio and position proportion gain:
*
ε=
in which,
ε: Lag Pulse (Puls);
f: Command Pulse Frequency (Hz);
Kp: Position Proportion Gain (1/S);
K
Gf ×
p
G: Electronic Gear Ratio.
Note: the above relationship is reached under the condition that position
feed-forward gain is 0%. If the position feed-forward gain is >0%, the lag pulse
will be less than that in the above calculation formula.
9.4 Calculation Method for Selecting Models of Servo System and Position
Controller
1) Command displacement and actual displacement:
DR
S
in which,
S: actual displacement mm;
I: command displacement mm;
δ: minimal unit of CNC mm;
CR: command frequency
multiplication coefficient;
CD: command frequency division coefficient
CRI
CD
DD
ZD
1
S
M
L
⋅⋅⋅⋅⋅=
DR: servo frequency multiplication coefficient;
DD: servo frequency division coefficient;
ST: grade division value per round of motor;
ZD: gear number of side gear of motor;
ZM: gear number of side gear of lead screw;
L: pitch of lead screw mm
Generally, S=I, which means command value equals actual value.
2) Maximal Command Speed of CNC:
CRF
≤⋅
f
×
60
CD
δ
max
66
Page 78

DA98D User Manual
In which, F: command speed mm/min;
f
3) Maximal Speed of Servo System:
In which, V
n
Actual maximal speed of machine tools is restricted by maximal speed of CNC and the servo
system.
in which, α: minimal displacement of machine tools mm;
N : natural number;
: maximal output frequency of CNC Hz(GSK980 为 128000).
max
DR
nV ××=
max
max
: maximal velocity of work bench permitted by the servo system mm/min;
max
: maximal rotation rate permitted by the servo motor r/min;
max
α
DD
⎡
⎢
⎣
L
⎤
CR
⎛
NINTINT ⋅⋅⋅
⋅=
⎜
CD
⎝
DR
⎞
⋅
⎟
⎠
⎥
⎦
min
ZD
1
STDD
ZM
L
δ
INT( ): integral number;
INT [ ]
: minimal integral num
min
67
Page 79

Add: No.52, 1
st
. Street, Luochong North Road, Luochongwei, Guangzhou, 510165, China
Website: http://www.gsk.com.cn E-mail: gsk@gsk.com.cn
Tel: 86-20-81796410/81797922 Fax: 86-20-81993683
All specification and designs are subject to change without notice. Aug. 2007/Edition 1
Aug. 2007/Printing 1
 Loading...
Loading...