

Page 1

Technische Unterlagen
PILOT A2, C/CE2,
und HYPERBARIC
Page 2

Page 3

Die in diesem technischen Handbuch enthaltenen Angaben betreffen lediglich die Pilot A2, C “ CE2 ”
und Hyperbaric mit Spritzenkörperpositionserkennung.
q WICHTIG : Sämtliche grundlegenden Änderungen an diesem Gerät (technische sowie
leistungsbezogene Merkmale etc.) durch Personal, das nicht zu Fa. Fresenius Vial SA
gehört, entbindet den Hersteller von jeglicher Verantwortung.
Laufende Reparaturen sowie Wartungsarbeiten können von einem Fachbetrieb Ihrer Wahl unter dessen
Verantwortung durchgeführt werden. Es wird jedoch empfohlen, zuvor eine technische Unterweisung durch das
Personal von Fa. Fresenius Vial oder MC Medizintechnik einzuholen.
Möglicherweise sind in diesem Handbuch Ungenauigkeiten bzw. Schreibfehler enthalten. In spätere Ausgaben
dieses Handbuchs können daher Änderungen eingebracht werden.
Jegliche Vervielfältigung, auch die Vervielfältigung von Ausschnitten dieses Werkes ist untersagt. Das Kopieren
oder die Vervielfältigung, unabhängig von der Art und Weise der Vervielfältigung (Photographie, Mikrofilm, CD,
Disketten etc.) ist strafbar und wird gesetzlich verfolgt.
Page 4

1. VORSTELLUNG........................................................................................................ 7
1.1. Funktionsübersicht....................................................................................................................................... 7
1.2. Vorsichtsmaßnahmen.................................................................................................................................. 8
1.3. Beschreibung der Hauptmerkmale.............................................................................................................. 8
1.3.1. Biologie ............................................................................................................................................. 8
1.3.2. Funktionsprinzip........................................................................................................................................ 8
1.3.3. Abmessungen / Gewichte......................................................................................................................... 8
1.3.4. Elektrische Daten ..................................................................................................................................... 8
1.3.5. Elektronische Komponenten ................................................................................................................... 8
1.3.6. Bedienungsanleitung Pilot A2, C.............................................................................................................. 8
2. PLATINEN...................................................................................................................9
2.1. Versorgungsplatine mit Motorsteuerung..................................................................................................... 9
2.1.1. Funktionsprinzip........................................................................................................................................ 9
2.1.2. Beschreibung der Anschlüsse................................................................................................................ 16
2.2. CPU Platine................................................................................................................................................ 19
2.2.1. Vorstellung ............................................................................................................................................. 19
2.2.2. Funktionsbeschreibung ......................................................................................................................... 19
2.2.3. Beschreibung der Verbindungselemente............................................................................................... 22
2.3. Anzeigeplatine ........................................................................................................................................... 25
2.3.1. Vorstellung.............................................................................................................................................. 25
2.3.2. Funktionsbeschreibung .......................................................................................................................... 25
2.3.3. Beschreibung der Verbindungen............................................................................................................ 27
2.3.4. Verbrauch ............................................................................................................................................... 28
3. KONFIGURATION, KALIBRATION UND KONTROLLEN .....................................29
3.1. KONFIGURATION..................................................................................................................................... 29
3.1.1. Konfigurationsmöglichkeiten des Druckparameters.............................................................................. 29
3.1.2. Konfiguration der verschiedenen angebotenen Parameter................................................................... 31
3.1.3. Ansichtstafel Spritzentyp / Anzeigenamen............................................................................................. 36
3.2. Kalibriermodus........................................................................................................................................... 37
3.2.1. EtA 4 ............................................................................................................................................... 37
3.2.2. EtA 6 ............................................................................................................................................... 37
3.2.3. EtA 9 (Pilot C)......................................................................................................................................... 37
3.3. Testmodus ................................................................................................................................................. 38
4. WARTUNG................................................................................................................45
4.1. Empfehlungen............................................................................................................................................ 45
4.2. Reinigung und Desinfektion ...................................................................................................................... 45
4.3. Lagerung.................................................................................................................................................... 45
4.4. Kontrolle der Led und der Tastatur............................................................................................................ 46
4.5. Test Batteriedauer ..................................................................................................................................... 46
4.6. Isolationstest.............................................................................................................................................. 46
4.7. Fehlerbehebung........................................................................................................................................ 46
4.8. Fehlermeldung........................................................................................................................................... 47
Technischer Zusatz zur Pilot HYPERBARIC........................................................48
Page 5
NOTIZEN:
Page 6
Page 7
1. Vorstellung
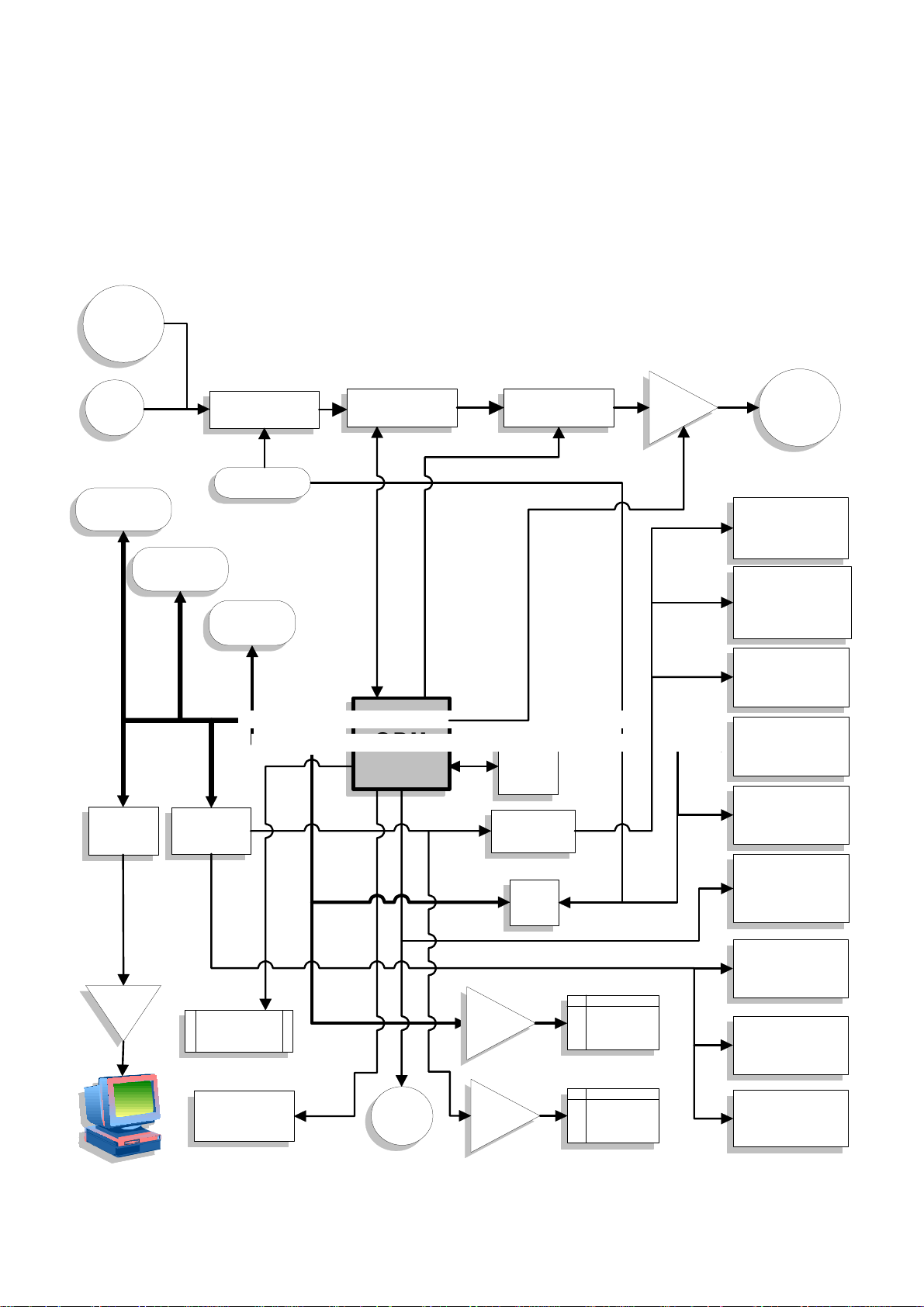
1.1. Funktionsübersicht
Ext
12/15V
15W
230V
EPROM
128K x 8
UART
RAM
8K x 8
interface
Power supply
Battery
EEPROM
512
Bus
BUS
SPI
ON / OFF
CPU
DC-DC
Converter
Watch
dog
opto
Interface
Motor
driver
Step
by step
motor
Motor
rotation
sensor
Syringe
barrel
sensor
Antisiphon
sensor
Occlusion
strength
sensor (C)
Displacement
sensor
RS232
Keyboard
Master
ADC
Buzzer
LCD
driver
LED
driver
LCD
Display
LED
Display
PILOT A2, C/CE2 BLOCK DIAGRAMM
Nurse
call
(option)
Occlusion
Switch
(A,A2,B)
Disengagement
Switch
Flange
Switch
Page 8

1.2. Vorsichtsmaßnahmen
Das Funktionsprinzip basiert auf dem “ Spindel / Mutter “ System . Eine Mechanik ermöglicht es, den Kolben mit bekanntem
Siehe die Bedienungsanleitung.
1.3. Beschreibung der Hauptmerkmale
1.3.1. Biologie
Das zu fördernde Medium ist nur mit dem Spritzenkörper und dem Patienten in Kontakt.
1.3.2. Funktionsprinzip
Durchmesser linear zu bewegen.
1.3.3. Abmessungen / Gewichte
q H x L x B : 120 x 330 x 155 mm.
q Gewicht : ca. 2,2 kg .
1.3.4. Elektrische Daten
q Netzanschluss 230 V - 50-60 Hz.
q Maximaler Verbrauch 23 VA.
q Sicherung F2 100 mAT 250V IEC 127
q Batterie 6V - 1.2 Ah/1,3 Ah
q Externer Netzanschluss 12 - 15V DC -15W.
1.3.5. Elektronische Komponenten
Die Pilot Spritzenpumpe besteht aus 3 Boards, die je nach Produkt und Optionen verschieden bestückt sind .
q Versorgungsplatine mit Motorsteuerung.
q CPU Platine.
q Anzeige und Tastatur Platine.
1.3.6. Bedienungsanleitung Pilot A2, C
Eine Bedienungsanleitung der Pilot A2, C kann auf Anfrage von unserer Serviceabteilung bezogen werden.
Page 9
2. Platinen
Die Versorgungsplatine mit Motorsteuerung beinhaltet aus verdrahtungstechnischen Gründen 6 Module, die auch einzeln
Das Versorgungsmodul ist ein Schaltnetzteil, das die ganze Elektronik versorgt und ebenfalls die Pufferbatterie von 1,1 1,2
oder 1,3 Ah lädt, wobei die Eingangsspannung sowohl Netzspannung als auch Gleichspannung von 12/15 V DC sein kann.
Dieses Modul erzeugt die nötigen +5V und Vbat für die Elektronik. Es beinhaltet einen Steuermodus ON/OFF dieser
externen
± 11 Volt 1,2 A begrenzt durch MAX652 und durch Verluste, die durch den Gleichrichter PR2 hervorgerufen
Dieser Regler wird entweder durch das Netz oder durch die Gleichspannung versorgt. Er erzeugt die Spannung VBC von
Die Spannung VBC kommt direkt aus der Batterie, wenn keine externe Spannungsversorgung anliegt. Anderenfalls wird
diese Spannung von der externen Spannungsversorgung geliefert, die dann die Elektronik versorgt und gleichzeitig die
2.1. Versorgungsplatine mit Motorsteuerung
2.1.1. Funktionsprinzip
beschrieben werden:
q Versorgungsmodul
q Motorsteuerungsmodul
q Analoges Eingangsmodul
q Modul für Optogabel, Motorrotation und Spritzenkolbenerkennung
q Eingangsmodul Mikroswitch, Entkopplung und Okklusion
q Zusatzmodul Schwesternruf und Interface RS 232
2.1.1.1. Versorgungsmodul
Versorgungsspannung.
2.1.1.1.1. Netzversorgungsspannung
Das Netzversorgungsmodul erzeugt eine Gleichspannung zwischen 10 und 16 Volt mit maximaler Stromstärke von 1,2 A.
Eingang Netzspannung auf J1:
Transformator:
Sicherung: F2 (Siehe Kapitel 1.1: Allgemeines)
Primärfilter : 4.7 NF 4000 V HR Kondensatorentyp DS1510 VDE
Sekundärfilter : C10 Elektrolytkondensator
Ausgangsspannung gemessen an TP4 für
Netzspannung
TR1 (Siehe Kapitel 2.9: Elektrische Schaltpläne)
15 VA Ausgangsspannung: 9 V ac
230 V gemessen 10%
2.1.1.1.2. Spannungsversorgung durch externe Gleichspannung 12-15V DC 15 W
Der Zugang für eine Gleichspannungsversorgung ist dazu gedacht, die Spritzenpumpe auch mit einer
Gleichspannung versorgen zu können, wie z. B. eine 12V Batterie (Krankenwagen).
Maximale Eingangsspannung ± 15 Volt verpolungssicher durch Gleichrichter PR2
Minimale Eingangsspannung
werden
Begrenzung ±16 Volt maximal mittels Zehnerdiode D41
2.1.1.1.3. Regler/Impulsladung
6,9V max., die zum Laden der an J4 angeschlossenen Bleigelbatterie von 1,1 bis 1,3 Ah und der Elektronik benötigt wird.
Stecker J4:
1 +Batterie
2 - Batterie
Batterie über die Diode D8 und die Sicherung F1 (Träge 1,6A) lädt:
Page 10
ON/OFF Modul ( AN / AUS )
Die Steuervorrichtung von VbatC und +5 V wird mittels U2 4011, U4 4538 und dem bi-stabilen Relais RL1 G6AK-234P
Ein verlängerter Tastendruck auf OFF unterbricht die Spannungsversorgung mittels dem vom Prozessor kommenden
Sowohl das Ein- als auch das Abschalten kann über ein externes Master-Modul erfolgen, und zwar durch die Signale CD-
Die Spannung +5V ± 5% wird von der Batteriespannung VBAT erzeugt mittels LM2931 V3, um die Kapazität der Batterie
Diese Spannung ist an TP2 messbar. Die Zeit für den Anstieg auf 5V muss kürzer als 100 ms sein, um einen einwandfreien
A2, C sind mit einem Untersetzungsgetriebe versehen, das die Spindel mit einem doppelten
A2 ist eine unipolare Schrittmotorsteuerung für einen Antriebsmotor vom Typ UBB6
erzeugt. Diese Vorrichtung ist ständig durch die Spg. VBF versorgt.
2.1.1.1.3.1. Vorrichtung
Mit 3 Eingängen:
TON Taste ON Sekundärkontakt/GND
TOFF Taste OFF Sekundärkontakt/GND
CD ALIM TTL-Signal aktiv bei 1 Unterbrechung der Spannungsversorgung
Mit 2 Ausgängen
VBAT Versorgungsspannung Batterie/externe Spannungsversorgung
OFF TTL-Signal offener Kollektor PULL-UP +5V Taste OFF gedrückt aktiv 0.
2.1.1.1.3.2. Funktionsprinzip
Ein kurzer Tastendruck auf ON setzt die Versorgung mittels TON in Betrieb.
Signal CDALIM.
Ein Zwangsaus wird durch einen verlängerten Tastendruck auf OFF (5s << t << 7s) erreicht.
ON und CD-OFF.
2.1.1.1.4. Versorgungsspannung VBAT und +5 Volt
Die Spannung VBAT kommt direkt von der Spannungsversorgung/Ladevorrichtung.
Sie dient der Versorgung der Anzeigevorrichtung und des Motors.
Diese Spannung ist abgreifbar an TP1 und J2.
Min Typ Max
VBAT 6,5 7
besser nutzen zu können.
RESET der UC-Karte zu gewährleisten.
2.1.1.2. Motorsteuerungsmodul
Das Motorsteuerungsmodul für den Schrittmotor gibt es in zwei Ausführungen.
Version PILOT A2 Unipolarmotor, 24 Schritte/Umdrehung
Version PILOT C Bipolarmotor, 24 Schritte/Umdrehung
Die Spritzenpumpen PILOT
Gewindegang dreht.
Eine Motorumdrehung entspricht 20 µm Schlittenvorschub.
Ein Motorschritt entspricht 0,8233 µm Schlittenvorschub.
2.1.1.2.1. Steuerung des Motors PILOT A2
Die Steuerung des Motors der PILOT
(28 Ohm/Wicklung).
Die Steuerung wird durch ET U14 74HC08 und U15 ULN 2803 gewährleistet.
Diese Steuerung beinhaltet 8 darlingtons mit offenem Kollektor. Die Versorgungsspannung ist VBAT.
2.1.1.2.1.1. Eingangssignale
Page 11
Diese Signale werden durch den Mikroprozessor auf der UC-Karte erzeugt und sind am Stecker J02 messbar. Diese
steuern den IC U15 ULN 2803.
Wenn das Signal I gleich 0 ist, wird die Spule über einen Widerstand von 470 Ohm vom Darlingtonsignal angesteuert, um
Die mit U13 L293E gebaute Steuerelektronik hat mehrere Funktionen und ermöglicht einen sparsamen Betrieb sowie einen
Phase A Phase A Motorsteuerung J2.5
Phase B Phase B Motorsteuerung J2.6
Phase C Phase C Motorsteuerung J2.7
Phase D Phase D Motorsteuerung J2.8
I Steuerung Motorstromreduzierung J2.9
2.1.1.2.1.2. Ausgangssignale
Diese Signale sind über J5 mit den Spulen des Motors verbunden.
Phase A Phase A Motor J5.6
Phase B Phase B Motor J5.5
Phase C Phase C Motor J5.4
Phase D Phase D Motor J5.3
2.1.1.2.1.3. Funktionsprinzip
Jede Motorspule wird angesteuert, wenn das entsprechende Phasensignal 1 ist.
Wenn das Stromregulierungssignal (I) 1 ist, wird die Spule direkt vom Darlington-Signal angesteuert.
den Stromverbrauch zu senken.
I mot für VBAT = 6,5 Volt VCEsat max
ULN2803 1,5 Volt
min max
wobei I = 0 10 mA 15 mA
wobei I = 1 200 mA 250 mA
Der Motor wird je nach Geschwindigkeit in einem der beiden Modi angesteuert.
Modus Motorfrequenz (Schritt/s = Hz) Beschreibung
1 0 bis 32.3 Strombegrenzung, 2 Phasen ON
2 32.3 bis 325 für Pilot A2 keine Strombegrenzung, 2 Phasen ON
2.1.1.2.2. Motorsteuerung der PILOT C
Die Motorsteuerung PILOT C ist eine bipolare Motorschrittsteuerung für den Typ UBB5 (11.5 Ohm pro Wicklung).
optimalen Drehmoment je nach Geschwindigkeit.
2.1.1.2.2.1. Eingangssignale
Diese Signale werden vom Mikroprozessor der UC-Karte erzeugt und sind am Stecker J2 messbar.
Phase A Phase A Motorsteuerung J2.5
Phase B Phase B Motorsteuerung J2.6
Phase C Phase C Motorsteuerung J2.7
Phase D Phase Motorsteuerung J2.8
I Strombegrenzungssteuerung J2.9
BOOST Boosteraktivierung und Stromregulierung J2.10
1.0.0.2.4.3 Ausgangssignale
Diese Signale sind über J5 mit den Spulen verbunden.
Phase A Phase A Motor J5.6
Phase B Phase B Motor J5.5
Phase C Phase C Motor J5.4
Phase D Phase D Motor J5.3
Page 12
2.1.1.2.2.2. Booster-Funktion
Wenn die Funktion aktiviert ist, wird der Strom der einzelnen Wicklungen auf 240 mA ±10% gebracht. An TP6 und TP7
Die Stromstärke der einzelnen Spulen wird mit einem Sollwert verglichen, der von R31, R41/R37 und R42 vorgegeben wird.
Das analoge Ausgangsmodul besteht aus einem digitalen Analogkonverter (10 bits 5 Kanäle MC 145053 U17) mit PCI-Bus.
Das CDANA-Signal, aktiv bei 1, steuert den Transistor T14 IRFD 9120, der wiederum die Spannung VREF in alles oder
nichts ansteuert. Diese Spannung versorgt die Empfänger und dient als Spannungsreferenz für den ADC. Alle Testpunkte
BOOST = 0 Der Motor wird durch VBAT der Batterie versorgt.
BOOST = 1 Aktivierung der Booster-Funktion. Der Motor wird mit 12V versorgt.
Die Spannung von 12 V ± 2 V wird mittels Spule L2, Diode D18, Kondensator C15 und Transistor T8 aus VBAT erzeugt.
Die Spannung ist an TP5 messbar.
Die Schwingfrequenz wird durch einen Oszillator U9 hervorgerufen. Die Spannung wird erhöht, wenn der Boost auf 1 ist.
2.1.1.2.2.3. Funktion Soft-Start
Wenn der Boost auf 1 geht, kann durch die Soft-Start-Funktion die anfängliche Stromzufuhr reguliert werden.
2.1.1.2.2.4. Stromregulierungsfunktion
BOOST = 1 und I = 1 Aktivierung der Stromregulierung des Motors
können die jeweiligen Amplituden der Wicklungen gemessen werden.
Eine Warnung wird dann von IC11 realisiert, indem die H-Brücken des L293E ab- oder zugeschaltet werden.
Die Wiederholungsfrequenz von 25 KHz wird von IC10 geliefert.
1.0.0.2.4.3 Strombegrenzungsfunktion
Ist das Boost-Signal gleich 0, dient die I-Leitung als Strombegrenzung.
I = 1 Die Brücke wird von den Linien A, B und D angesteuert
I = 0 Die H-Brücke ist offen, es fließt kein Strom in die Wicklungen.
Der Motor wird je nach Rotationsfrequenz (Schritt/Schitt) in einem der drei Steuerungsmodi angesteuert.
Modus Schrittmotorfrequenz Beschreibung
1 0 bis 32,3 Stromminderung, eine Phase ON
2 32,3 bis 150 eine Phase ON, keine Stromregulierung
3 150 bis 588 Stromregulierung, boost ON, zwei Phasen ON
2.1.1.3. Analoges Ausgangsmodul
Die Bussignale SPI CLK SI SO CSADC können an J2 abgegriffen werden.
Der AD-Wandler liefert außerdem ein end of talk-Signal EOC.
sind am Stecker J9 zusammengeführt.
Messen von VREF J9.7
Vref pulsiertes Signal 5 V ±0,25V
Eingänge des Konverters
ANO Messen der Batteriespannung VBAT
AN1 Nicht verwendet
AN2 Interne Verschlußmeßbrücke der PILOT C
AN3 Nicht verwendet
AN4 Empfänger der absoluten Schieberposition des Poti
Page 13
2.1.1.3.1. Messung der Batteriespannung
Die Spannung VBAT wird durch einen Spitzenspannungsdetektor gemessen, bestehend aus D19, R59, R60 und C23, so
Der Drucksensor liefert eine differentielle Spannung, die proportional der Kolbenkraft ist. Diese Spannung wird um 200 ±
20 % durch einen Verstärker U18 TLC251erhöht. Der Potentiometer P1 ermöglicht ein Offset und eine Anfangseinstellung.
Ein Potentiometer, der von der Bewegung des Antriebskopfes fortgezogen wird, ermöglicht die genaue Feststellung der
Dieser Poti wird durch eine pulsierende Spg, VREF versorgt. Die Ausgangsspannung wird mittels R61 und C22 filtriert. Sie
dass die Spannungstiefs, die durch den impulsartigen Strombedarf des Motors entstehen, nicht berücksichtigt werden.
Diese Spannung ist an J9.3 messbar.
Für VBAT = 6,5V V(J9.3)= 4V ±10% laufender Motor
120 ml/h PILOT A2
800 ml/h PILOT C
2.1.1.3.2. Drucksensor Interface
Nur die Pilot C besitzt einen Drucksensor, der mit dem Kolben fest verbunden ist.
2.1.1.3.2.1. Besonderheiten des Drucksensors:
Technik des Sensors: Brücke mit 4 Eichmaßen.
Impedenz 350 Ohm ± 15 % oder 1 KOhm ± 15 %.
Meßbereich 0 bis 150 N
Überlast 250 N.
Entfernung des Nullpunktes < ± 10 mV
Empfindlichkeit 8,5 bis 12 mV bei 150 N
2.1.1.3.2.2. Funktionsprinzip :
Das Eichen des Sensors mittels 2 bekannter Größen erlaubt die Definition des Sensors und der Messkettenfunktion.
AN3 J9.4 Pulsiertes Signal mit geregelter Amplitude von 0,6 V ± 0,05 V ohne Krafteinwirkung.
2.1.1.3.2.3. Verbindung des Drucksensors :
J8.1 VREF Vers (+) der Meßbrücke
J8.2 S (-) Ausgang (-)der Meßbrücke
J8.3 S (+) Ausgang (+)der Meßbrücke
J8.4 GND Vers (-)der Meßbrücke
2.1.1.3.3. Festellung der Position des Kolbens
Lage. Durch die Kalibrierung in 2 bekannten Positionen ist es möglich, die Lage dieses Potentiometers zu definieren.
ist direkt am Eingang AN4 (J9.2) angeschossen.
Anschlussbelegung :
J3.1 VREF
J3.2 Mittelpunkt J9.2
J3.3 GND
2.1.1.4. Optogabelmodul
Das Optogabelmodul umfasst 2 Lichtschranken:
q Lichtschranke Motordrehzahl
q Lichtschranke Spritzenerkennung
Page 14
2.1.1.4.1. Drehzahlerkennung Motor
Sie ermöglicht die Kontrolle der Rotation und der Drehrichtung. Die Diode des Optos wird mit Impulsen angesteuert, um
Die Steuersignale CDOPT1 und das Ausgangssignal SOPT1 werden von der UC-Karte sowohl generiert als auch
Die opto–gabel ist auf der Spritzenkolbenhaltevorrichtung angebracht. Sie ermöglicht die Kontrolle der Präsenz und des
Die Steuersignale CDOPT2 und das Ausgangssignal SOPT2 werden von der UC-Karte sowohl generiert als auch
Diese Gabel ist auf einer Scheibe angebracht, die fest mit dem Motor verbunden ist.
Energie zu sparen.
Die Lichtschranke ist an J5 angeschlossen.
Steuerung Transistor T11 Strombegrenzung (R51) bei 8 mA
Ausgang Transistor T10 Nivau TTL
Steuerungssignal CDOPT1 aktiv bei 1 J2.14
Ausgangssignal SOPT1 aktiv bei 1 J2.11 J9.6
Anode Diode J5.7
Kathode Diode J5.8
Emitter Transistor J5.10
Kollektor Transistor J5.9
Td ON max 100 Mikrosekunden
Td OFF max 200 Mikrosekunden
Das SOPT1-Signal wird von U20 aufbereitet.
verarbeitet und laufen über den Stecker J2.
2.1.1.4.2. Lichtschranke Spritzenkolbenerkennung
Haltens eines Spritzenkolbens. Die Lichtschranke ist an J8 angeschlossen.
Steuerung Transistor T12 Strombegrenzung R52 bei 8 mA
Ausgang Transistor T13 Nivau TTL
Steuerungssignal CDOPT2 aktiv bei 1 J2 15
Ausgangssignal SOPT2 aktiv bei 1 J2 12 J9.8
Anode Diode J8. 6
Kathode Diode J8. 5
Emitter Transistor J8. 10 gemeinsame Masse
Kollektor Transistor J8. 7
SOPT2 0V Spritzenkolbenerkennung
SOPT2 5V keine Spritzenkolbenerkennung
verarbeitet und laufen über den Stecker J2.
Die Diode des Optos wird durch Impulse angesteuert, um Energie zu sparen.
2.1.1.5. Switch Mikroschalter
2.1.1.5.1. Mikroschalter Entkopplung
Der Mikroschalter ist am mechanischen Block des Kolbens angebracht. Er wird betätigt durch den Entkopplungshebel.
Der Mittelpunkt des Schalters ist an GND angeschlossen.
Diese Signale laufen durch die Motorsteuerungskarte und sind an der UC-Karte an J2 zu messen.
J8.8 DEB/ON nicht verwendet
J8.9 DEB/OFF 0 V eingekoppelt J2.21
J8.9 DEB/OFF 5 V entkoppelt J2.21
Page 15
2.1.1.5.2. Mikroschalter Okklusion
A2 hat keinen Drucksensor. Die Okklusion wird mittels Federdruck festgestellt, der dann einen Mikroschalter
Das monostabile Relais RL2, dessen 2 Kontakte sowie der Mittelpunkt auf dem Stecker J6 belegt werden können, wird
Die V24 RS232 Interface-Option ist nur aktiv, wenn eine Brücke zwischen den Pins 2 und 5 des J6-Steckers
Die Signale RX2, receive data und TX2, transmit data, werden vom asynchronen, seriellen Verbindungscontroller generiert.
Letzter befindet sich im Mikrorechner der UC-Karte, wobei die Signale lediglich von J2 bis J6 über die Motorsteuerungskarte
Die PILOT
auslöst.
Die Signale laufen nur über die Motorsteuerungsplatine und sind auf der UC-Karte an J2 zu messen.
J8.1 VREF nicht verwendet
J8.2 OCC/ON nicht verwendet
J8.3 OCC/OFF 0 V kein Gegendruck J2.23
J8.3 OCC/OFF 5 V Gegendruck J2.23
2.1.1.6. Optionale Module und Kommunikation
Für die PILOT Spritzenpumpe können drei zusätzliche Komponenten geliefert werden.
Schwesternruf RS 232 MASTER
PILOT A2 (016020)Option - -
PILOT A2 (016120)Option - serienmäßig -
PILOT C Option serienmäßig serienmäßig
2.1.1.6.1. Schwesternruf
durch das BUZ-Signal gesteuert, welches ebenfalls den Buzzer auf der Anzeigeplatine steuert.
J6. 6 gemeinsamer Mittelpunkt
J6. 7 Kontakt normalerweise offen Unterbrechungsfähigkeit 24V 1A
J6. 8 Kontakt normalerweise geschlossen
2.1.1.6.2. Funktion RS 232
kurzgeschlossen ist.
J6. 1 Ausgang transmit data TX1
J6. 2 + 5V ( DSR )
J6. 3 Eingang receive data RX1
J6. 4 GND
J6. 5 Validierung (DTR)
J6.17 CTS
J6.18 RTS
2.1.1.6.3. Verbindungskabel Konfiguration Masteranschluss
2.1.1.6.3.1. Verbindungskabel
laufen.
Bei den PILOT A2 (016020)ohne RS232 ist diese Verbindung für die Konfiguration der Spritze gedacht.
J6.14 RX2 J2.31
J6.15 TX2 J2.32
J6.16 GND
Page 16
2.1.1.6.3.2. Masteranschluss
C kann über eine auf der Geräterückseite befindliche subD 15 Punkte mit einem Mastermodul verbunden
Die PILOT
werden.
Die Signale RX2 und TX2 dienen der Kommunikation mit dem Mastermodul.
J6.13 + VBAT Versorgung des Masters
J6.14 RX2 J2.31
J6.15 TX2 J2.32
J6.15 GND Masse Master - Versorgung
J6.9 CD-ON Einschaltbefehl durch Master
J6.10 CD-OFF Ausschaltbefehl durch Master
J6.12 I-SECT Signal für Masterspannungsversorgung vorhanden
J6.11 I-OPTOM Drehsignal des Motors vom Master kontrolliert
2.1.2. Beschreibung der Anschlüsse
2.1.2.1. J1 Spannungsversorgungsstecker
Pin Beschreibung
1 Masse
2 PHASE
2.1.2.2. J2 Verbindungsstecker UC - Karte
Pin Beschreibung
1 +5V geregelte Spannung
2 GND Spannungsversorgung
3 +VBAT Spannungsversorgung
4 GND Spannungsversorgung
5 A Phase Motorsteuerung
6 B Phase Motorsteuerung
7 C Phase Motorsteuerung
8 D Phase Motorsteuerung
9 Motorsteuerungssignal
10 BOOST Signal
11 sopt1 Ausgang Lichtschranke Rotation
12 sopt2 Ausgang Lichtschranke Spritzenkolbenerkennung
13 nicht verwendet
14 cdopt1 Steuerung Lichtschranke Rotation
15 cdopt2 Steuerung Lichtschranke Spritzenkolbenerkennung
16 OFF Signaltaste off gedrückt ON/OFF
17 SECT Signal Spannungsversorgung vorhanden
18 CDALIM Signal Spannungsversorgung unterbrochen
19 LDSECT Steuerung der LED Spannungsversorgung
20 CTS clear to send
21 DEB/OFF Entkopplungssignal aktiv bei 0
22 RTS request to send
23 OCC/OFF Okklusionssignal aktiv bei 0
24 BUZ Steuerung des Schwesternrufrelais
25 EOC Kommunikationsende ADC
26 CSADC Bus Auswahl SPI ADC
27 CLK Bustakt SPI ADC
28 SI data IN Bus SPI ADC
29 SO data out Bus SPI ADC
30 CDANA Steuerung Versorgung analoge Empfänger
31 RX2 receive data TTL Leitung 2
32 TX2 transmit data TTL Leitung 2
Page 17
Pin Beschreibung
: Externer Druckabgleich, serielle Schnittstelle RS232,
33 TXD1 transmit data TTL Leitung 1
34 RXD1 receive data TTL Leitung 1
35 TOFF Taste OFF
36 TON Taste ON
37 +VBAT Spannungsversorgung
38 GND
39 +5V
40 GND
2.1.2.3. J3 Steckverbindung Positionspotentiometer
Pin Beschreibung
1 VREF
2 Mittelpunkt
3 GND
2.1.2.4. J4 Interner Batterieverbindungsstecker
Pin Beschreibung
1 + Batterie
2 - Batterie
2.1.2.5. J5 Motorstecker
Pin Beschreibung
1 +VBAT
2 +VBAT
3 PHASE D
4 PHASE C
5 PHASE B
6 PHASE A
7 Anode der Diode Dreherkennung /+5V
8 Kathode der Diode Dreherkennung
9 Kollektor des Transistors Dreherkennung
10 Emitter des Transistors Dreherkennung / GND
2.1.2.6. J6 Stecker Hinterwand
Der Hinterwandstecker umfasst folgende Signale
Schwesternrufrelais und externe Konfigurationsleitung.
Pin Beschreibung
1 TX1 transmit data Leitung 1
2 +5V
3 RX1 receive data Leitung 1
4 GND
5 Validierung Interface
6 Mittelpunkt Schwesternrufrelais
7 Schwesternrufrelais normalerweise offen
8 Schwesternrufrelais normalerweise geschlossen
9 CD ON external ON
10 CD OFF external OFF
11 I-OPTON output Motorkontrolle
12 I-SECT led Netzstecker
13 + VBAT externe Spannungsversorgung
14 RX2 receive data Leitung 2
Page 18

Pin Beschreibung
: Bevor Sie den Antrieb ausbauen, ist der Flexcordanschluß von der Spannungsversorgungsplatine
15 TX2 receive data Leitung 2
16 GND
17 CTS
18 RTS
2.1.2.7. J7 Externe Gleichstromstecker
Pin Beschreibung
1 ± externe Spannungsversorgung
2 ± externe Spannungsversorgung
2.1.2.8. J8 Verbindungsstecker Flexcord
Die Flexcordsteckverbindung umfasst alle Signale der auf dem Schieberkopf angebrachten Sensoren und Mikrotaster:
Pin Beschreibung
1 +VREF + interne Abgleichbrücke
2 E1 Eingang interne Abgleichbrücke/Okklusion ON
3 E2 Eingang interne Abgleichbrücke/Okklusion OFF
4 GND – interne Abgleichbrücke
5 Kathode Spritzenhaltererkennungsdiode
6 Anode Spritzenhaltererkennungsdiode + 5V
7 Kollektor Spritzenerkennungstransistor
8 Mikro-switch Entriegelung ON
9 Mikro-switch Entriegelung OFF
10 GND
q Achtung
zu lösen.
2.1.2.9. J9 Testpunkte Pilot
Pin Beschreibung
1 GND
2 Ausgang Positionsempfänger
3 Ausgang Batterieentladekontrolle
4 Ausgang Drucksensor verstärkt
5 nicht verwendet
6 Ausgang Motordrehzahlerkennung
7 Referenzspannung Drucksensor und Bewegungspoti
8 Ausgang Lichtschranke Spritzenkolbenerkennung
2.1.3. Elektronikschaltpläne
Die Elektronikschaltpläne befinden sich in Anlage 2.
Page 19

2.2. CPU-Platine
( A2, C - Version 20/60 ml) umgibt einen im offenen Modus gebauten 80C32-Prozessor. Sie
verarbeitet alle peripheren, direkt mit dem Bus des Prozessors verbundenen Signale. Die Platine ist mit der
Versorgungsplatine über eine 40 adrige Leitung verbunden und verfügt über eine feste Verbindung mit der Anzeigeplatine.
Der Mikroprozessor arbeitet mit 12 MHz, erzeugt vom Quartz Q1. Er wird in geöffneter Weise benutzt: Leitung EA/VP mit
Die Dekodierung erzeugt alle Auswahlsignale der Umgebungselemente. Sie wird durch 3 ICs vom Typ 74HC138 U5 u.
541 U16 / Schreiben im Steuerungsregister
Funktionsprinzip: Der IC U11 generiert sowohl die RESET-Signale, aktiv bei 1, für den Prozessor und für den UART als
2.2.1. Vorstellung
Die CPU-Platine der PILOT
Sie bildet eine Einheit mit dieser Karte und ist unter dem Frontdeckel befestigt.
Um den Stromverbrauch möglichst gering zu halten, wird sie in CMOS-Technik hergestellt.
q Stromverbrauch 5 Volt 80 mA max.
2.2.2. Funktionsbeschreibung
Die UC-Karte beinhaltet 6 Funktionsgruppen:
q Prozessor RAM ROM Dekodierung
q Reset WATCH DOG
q Erweiterung der parallelen Ports
© Interfaceanzeige Tastatur
© Motorinterface
© Interface Empfänger
q BUS SPI
q Asynchrone Serienverbindung
q Empfänger Lichtsignale
2.2.2.1. Prozessor RAM ROM Dekodierung
GND verbunden. Das Entschlüsseln Adresse/Eingaben wird durch den 74HC573 U3 bewerkstelligt.
An diesem Bus sind eingebaut:
32KB statisches RAM U6
27C010 128 KB (erweiterbar auf 512 KB) U4
2.2.2.1.1. Adressen - Dekodierung
74HC02 U7 und 74HC08 U18 bewerkstelligt..
EPROM Programm -Zone PSEN* bei 0 U1.32
Angaben - Zone PSEN* bei 1 U1.32
2.2.2.1.1.1. Angaben - Zone
$0000 $5FFF RAM* Auslesen / Schreiben im RAM U6
$6000 $7FFF WSEG Schreiben im Steuerungsregister HC273 IC35 U13 der Anzeigensegmente
$8000 $9FFF WK/INP1 Schreiben im Steuerungsregister HC273 14 der Anzeigensäulen und der
Tastatur / Lesen des Registers HC541 U15
$A000 $BFFF CDG* Reaktivierung des Watchdog schreiben
$C000 $DFFF INP2/WMOT Lesen des Registers HC
HC273 12 des Motors
$E000 $FFFF UART* Lesen / Schreiben Serienverbindung RS 232
2.2.2.2. Reset watch-dog
Das Modul RESET WATCH-DOG wird durch TL7705 U10 und U11 bewerkstelligt.
auch für den RST*, aktiv bei 0, für die anderen peripheren Elemente. Diese Signale werden in zwei Fällen aktiv:
q Bei Inbetriebnahme
q Sobald der WATCH-DOG ausgelöst wird und bleibt solange aktiv, bis der Strom abgeschaltet wird.
Page 20

2.2.2.2.1. Reset bei Inbetriebnahme
Die Schaltung TL 7705 garantiert die Reset-Leitung von +5V, die aktiv wird, sobald die bei +4,75V liegende
Funktionsschwelle der Ics überschritten wird, und sich wieder ausschaltet, sobald die +5V-Schwelle unterschritten wird
Bei Inbetriebnahme wird C12 über D1 durch U10 geladen. Diese Ladung wird während des Betriebes auf mehr als 1,5 V
Das Betriebssystem führt mit einer Periode von 1ms eine Überprüfung durch. Diese Überprüfung erzeugt dann einen
Impuls von 5V für die Dauer einer 1 µs am Ausgang U7.10, der dann den Kondensator C12 über einen Hochpass,
Sollte das Betriebssystem nicht einwandfrei funktionieren, würde sich C12 vollständig entladen, die Leitung RESTIN* von
U11 auf 0 fallen. Daraus resultierend würde das RESET-Signal aktiv, jegliche Eingabe blockiert, die Spritzeneingabe
Die Anzeige besteht aus Leuchtdioden, die durch eine multiplexe Matrix, 8 Linien x 8 Säulen, angesteuert wird, so dass
Die FAIL-Diode zeigt an, dass die Pilot einen Defekt hat. Die Ansteuerung ist invers, so dass der RESET bei 1 aktiv wird.
Die FAIL-Diode wird außerhalb der Anzeige gelegt, damit sie einen sichtbaren Alarm geben kann, wenn der Mikroprozessor
Die Steuerung des BUZZER ist invers und steuert den Transistor T4, mit dem sie einen gemeinsamen Emitter hat. Der
Kollektor des Transistors steuert gleichzeitig den Buzzer auf der Anzeigeplatine und das Schwesternrufrelais auf der
Die Tastatur ist eine Matrizentastatur 6x3 plus 2 unabhängige Tasten, die einen gemeinsamen GND haben. Bei den Tasten
TON und TOFF handelt es sich um die ON/OFF-Tasten, wobei die Tastatur an die Anzeigeplatine angeschlossen ist. Die
Die Säulen dieser Tastatur werden von den selben Signalen wie die Säulen der Anzeigematrix gesteuert, wodurch sowohl
die Tastatur als auch die Anzeige gleichzeitig observiert werden können. Durch das Register U15 können die drei Zeilen der
Das Motorsteuerungsregister U12 generiert die 4 Steuerungssignale (I) der jeweiligen Motorphasen A, B, C, D und des
Mit dem Sensorenzustandsregister U16 können die Alles-oder-Nichts-Zustände der Mikro-switches und der
und/oder wenn die Leitung RESTIN* (U11.2) bei 0 liegt. Diese Leitung wird vom WATCH DOG gesteuert.
Die Dauer des Reset bei Inbetriebnahme, wird durch den Kondensator C10 220nF 100 ms bestimmt.
2.2.2.2.2. Watch-dog
Der WATCH-DOG-Kreis besteht aus U10, U11, C12, D2, D1, R4, C11.
gehalten.
bestehend aus C8 D3 D2, lädt. Der Kondensator entlädt sich dann über Widerstand R4.
inaktiviert, der Buzzer würde ertönen und die FAIL-Anzeige erscheinen.
Die Zeit bis zum Auslösen des WATCH-DOG beträgt weniger als 400 ms.
2.2.2.3. Interface Tastatur
2.2.2.3.1. Anzeigeregister
insgesamt 64 Punkte angesteuert werden können.
Der Mikroprozessor steuert die Matrix mit einer Periode von 16ms, 2ms pro 8 LED an.
nicht funktionsfähig ist.
2.2.2.3.2. Buzzer
Motorsteuerungskarte. Beim RESET wird der Buzzer aus Sicherheitsgründen aktiviert.
Signal BUZ J5 Pin 6, und J3 Pin 24,50 mA und 6,75 Volt max.
2.2.2.3.3. Tastaturregister
Signale TON und TOFF durchlaufen lediglich die UC-Karte.
Tastatur LIG1, LIG2, LIG3 gleichzeitig überwacht werden, um zu überprüfen, ob eine dieser Zeilen betätigt wurde.
2.2.2.3.4. Motorsteuerungsregister
Booster-Steuerungssignals Boost, sowie das Signal CDOPT1 der Motordrehzahlüberwachung.
2.2.2.3.5. Register Sensorenzustand
Spritzenkolbenerkennung des Schiebers gelesen werden.
Page 21

2.2.2.4. Bus SPI EEPROM
Der SPI ist ein synchroner Kommunikationsserienbus, der mit allen peripheren Geräten verbunden ist, und wird von den
Die serielle Verbindung RS 232 erfolgt durch den IC U8 SCC2691, (asynchroner Kommunikationskontroller) und den IC
mit Option RS 232
Die Taktfrequenz wird durch das Quartz Q2 3, 6864 MHz gegeben, das über einen programmierbaren Baudratengenerator
Der SCC2691 befindet sich am Mikroprozessorbus und steuert die Signale RXD1, receive data, auf J3 Pin 34, und D1,
Die Serienverbindung TTL wird durch einen internen Controller des Prozessors gesteuert. Sie nutzt einen der internen
Timer des Prozessors zur Generierung der Baudrate des 12 MHz-Prozessors. Die Serienverbindung steuert die Leitungen
TXD2 transmit data und RXD2 receive data. Bei diesen Leitungen verfügen sowohl die Eingänge als auch die Ausgänge
und einer eventuellen Verbindung mit einem externen
80C32 angesteuert.
Die PILOT versorgt 3 periphere Elemente mit dem SPI-Bus.
q Das 2KB EEPROM 24C16 U2 befindet sich auf der UC-Karte.
q Der Analogwandler MC 145053 befindet sich auf der Motorsteuerungsversorgungskarte.
q Der Treiber der Anzeige LCD COP 472N-3 befindet sich auf der Anzeigenplatine.
Dieser Bus hat 3 Kommunikationsleitungen.
Pin des Mikroprozessors
CLK des Mikroprozessors P1.5
SO periphere Prozessordaten P1.7
SI periphere Prozessordaten P1.6
Plus eine Selektionsleitung pro Element
CSEEP* Chip select EEPROM P1.4
CSLCD Chip select LCD P1.1
CSADC* Chip select ADC P1.3
EOC Signal Kommunikationsende ADC P1.2
CDANA Signal Validierung Stromversorgung der INT1
analogen Empfänger
2.2.2.5. Asynchrone Serienverbindungen
Die PILOT hat 2 asynchrone Serienverbindungen.
Option RS 232 Linie 1
serielle TTL Konfiguration Linie 2
2.2.2.5.1. Serienverbindung RS 232
des RS232-Interface, der sich auf der Stromversorgungsplatine befindet. Diese IC sind nur an PILOT
vorhanden.
verfügt. Er kann die Impulse der mit dem Prozessor verbundenen Leitung ITRS232 in INTO umwandeln.
transmit data, auf J3 Pin 35 sowie die Signale RTS und CTS.
Die RS 232-Verbindung ist für den externen Anschluß an einen PC gedacht.
q Achtung : Damit die serielle Verbindung über RS232 an einer Pilot A oder A2 aktiv sein kann, muß diese
Pilot mit einer Spannungsversorgungskarte vom Typ A 16VA RS232 ausgestattet sein. Ausserdem muss
die Hinterwand über einen Anschluss vom Typ sub D 9 verfügen.
2.2.2.5.2. Serienverbindung TTL
über Buffer vom Typ U9 74HC14.
Diese Leitungen können an J3 abgegriffen werden.
TX2 J3 Pin 32
RX2 J3 Pin 31
Diese Kommunikationsleitung dient der Konfiguration der PILOT
Mastermodul.
Page 22

2.2.2.6. Lichtschranke OPTO
sind die Lichtschranken der Spritzenkolbenerkennung, der Spritzenkörpererkennung und der
Die Schnittstelle der Spritzenkörpererkennung befindet sich auf der UC-Karte und wird durch die Transistoren T1, T2 und
mit Spritzenpositionserkennung und sind nicht
Die Lichtschranken der PILOT
Motordrehzahl.
T3 bewerkstelligt. Der Widerstand R9 begrenzt den Strom der Diode auf 8 mA.
2.2.2.6.1. Lichtschranke Spritzenkörpererkennung
Achtung : Die Lichtschranke und der Verschluss sind spezifisch für die Pilot
mit Vorgängerversionen kompatibel.
Durch die 2 Optos können die beiden Spritzengrößen (60 cc und 20 cc) erkannt werden.
J2.1 Anode Diode Opto +5V
J2.2 Gemeisamer Punkt Kathode Opto und Emiter Transistor
J2.3 Kollektor Transistor Opto 1
J2.4 Kollektor Transistor Opto 2
Steuersignal : CDOPT3
Ausgangssignal : SOPT4
Ausgangssignal: SOPT3
SOPT3 SOPT4
Alarm Spritzenhalter oben 0 0
Erkennung 60 cc 1 0
Erkennung 20 cc 0 1
Alarm Spritzenhalter unten 0 0
Die Schnittstellen Motordrehzahlerkennung und Spritzenkolbenerkennung befinden sich auf der Motorsteuerungskarte.
2.2.2.6.2. Motordrehzahlerkennung
Steuersignal : CDOPT1
Ausgangssignal:SOPT1
2.2.2.6.3. Spritzenkolbenerkennung
Steuersignal: CDOPT2
Ausgangssignal:SOPT2
2.2.3. Beschreibung der Verbindungselemente
2.2.3.1. J1 Nicht verwendet
Dieser Stecker ist für Folgemodelle gedacht.
2.2.3.2. J2 Steckverbindung Spritzenkörpererkennung
Pin Beschreibung
1 Masse
2 Kontakt Spritzenkörper
3 Anode Diode Opto +5V
4 Gem.Punkt Kathode Diode und Emitter Transistor Opto 1 und Opto 2.
5 Kollektor Transistor Opto 1
6 Kollektor Transistor Opto 2
Page 23

2.2.3.3. J3 Verbindungsleitung Versorgung/UC Karte
An J3 ist eine 40 adrige Leitung angelötet, die die Versorgungskarte mit der CPU Karte verbindet.
Pin Beschreibung
1 +5V geregelte Spannung
2 GND Spannungsversorgung
3 +VBAT Spannungsversorgung
4 GND Spannungsversorgung
5 A Phase Motorsteuerung
6 B Phase Motorsteuerung
7 C Phase Motorsteuerung
8 D Phase Motorsteuerung
9 Motorsteuerungssignal
10 BOOST Signal
11 sopt1 Ausgang Lichtschranke Rotation
12 sopt2 Ausgang Lichtschranke Spritzenkolbenerkennung
13 nicht verwendet
14 cdopt1 Steuerung Lichtschranke Rotation
15 cdopt2 Steuerung Lichtschranke Spritzenkolbenerkennung
16 OFF Signaltaste off gedrückt ON/OFF
17 SECT Signal Spannungsversorgung vorhanden
18 CDALIM Signal Spannungsversorgung unterbrochen
19 LDSECT Steuerung der LED Spannungsversorgung
20 CTS clear to send
21 DEB/OFF Entkopplungssignal aktiv bei 0
22 RTS request to send
23 OCC/OFF Okklusionssignal aktiv bei 0
24 BUZ Steuerung des Schwesternrufrelais
25 EOC Kommunikationsende ADC
26 CSADC Bus Auswahl SPI ADC
27 CLK Bustakt SPI ADC
28 SI data IN Bus SPI ADC
29 SO data out Bus SPI ADC
30 CDANA Steuerung Versorgung analoge Empfänger
31 RX2 receive data TTL Leitung 2
32 TX2 transmit data TTL Leitung 2
33 TXD1 transmit data TTL Leitung 1
34 RXD1 receive data TTL Leitung 1
35 TOFF Taste OFF
36 TON Taste ON
37 +VBAT Spannungsversorgung
38 GND
39 +5V
40 GND
Page 24

2.2.3.4. J4 Verbindungselement Anzeigenkarte
Pin Beschreibung
1 SEG1 Anzeigenmatrix Linie 1
2 SEG2 Anzeigenmatrix Linie 2
3 SEG3 Anzeigenmatrix Linie 3
4 SEG4 Anzeigenmatrix Linie 4
5 SEG5 Anzeigenmatrix Linie 5
6 SEG6 Anzeigenmatrix Linie 6
7 SEG7 Anzeigenmatrix Linie 7
8 SEG8 Anzeigenmatrix Linie 8
9 COL1 Anzeigenmatrix u. Tastatur Säule 1
10 COL2 Anzeigenmatrix u. Tastatur Säule 2
11 COL3 Anzeigenmatrix u. Tastatur Säule 3
12 FAIL Steuerung der Diode FAIL
13 RDCRT Steuerung Stromreduzierung der Anzeige
14 LIG1 Tastaturinterface Linie 1
15 LIG2 Tastaturinterface Linie 2
16 LIG3 Tastaturinterface Linie 3
17 LDSECT Steuerung der Netz LED
18 +5V Versorgung
19 VBAT Versorgung
20 GND Versorgung
2.2.3.5. J5 Verbindung UC/Anzeigen
Pin Beschreibung
1 TON Taste ON
2 TOFF Taste OFF
3 SI Bus SPI
4 CLK Bus SPI
5 CSLCD Bus SPI
6 BUZZ Steuerung BUZZER
7 VBAT Versorgung
8 GND Versorgung
Page 25

2.3. ANZEIGENPLATINE
Die Anzeigeplatine befindet sich direkt unter dem Spritzenpumpendeckel und beinhaltet alle für den Dialog mit dem
Die Leuchtanzeige besteht aus 31 LEDs und fünf 7-Segmentanzeigen mit Dezimalpunkt, mit 2 Ausnahmen, die aus der
Die Dioden und die Anzeigeelemente werden von multiplexen Matrizen 8 Säulen x 9 Zeilen gesteuert. Die LEDs und die
Die 8 Säulen werden durch die Signale SEG1 bis SEG8 über die NPN-Transistoren Q14, Q7, Q11, Q13, Q17, Q12, Q16
und Q15 angesteuert. Diese Transistoren sind in Reihe angeordnet, so daß der Strom bei eingeschaltetem Motor geregelt
Die Signale COL/DIG1 bis COL/DIG9, die die 9 Zeilen steuern, werden zerlegt durch den IC 7 74HC138, ausgehend von
den Signalen COL1,COL2,COL3, die wiederum von der UC-Karte generiert werden. Die Signale steuern die Kathoden der
Um den Eindruck zu erwecken, dass die Anzeige permanent leuchtet, müssen die Segmente mit einer Periode von 16 ms,
2.3.1. Vorstellung
Anwender erforderlichen Elemente.
Sie ist über eine starre Steckverbindung mit der CPU-Karte verbunden.
Die Folientastatur ist an die Anzeigeplatine angeschlossen.
2.3.2. Funktionsbeschreibung
Die Anzeigeplatine besteht aus 4 Modulen:
q Leuchtanzeige
q Tastaturinterface
q LCD-Anzeige
q Buzzer
2.3.2.1. Leuchtanzeigen
Tabelle hervorgehen.
Anzeigen haben eine gemeinsame Kathode.
werden kann.
jeweiligen Transistoren PNP Q3, Q4, Q5, Q6, Q9, Q10, Q2, Q18.
d. h. 2 ms pro Segment aufgefrischt werden.
Jedes Segment verbraucht 20 mA, so dass 160 mA für eine vollständige Anzeige benötigt werden.
2.3.2.1.1. Tabelle der Leuchtdioden
In der nachstehenden Tabelle sind diese Dioden je nach Version beschrieben.
Ref. Namen Typ Seg. Dig. Pilot
LD1 Netzspannung gelb* A2/C
LD2 Spritzenkörperalarm rot 4 A2/C
LD3 Spritzenkolbenalarm rot 6 4 A2/C
LD4 Spritzenauswahl grün A2/C
LD5 Spritzenauswahl grün 2 1 A2/C
LD6 Minute grün 5 3 A2/C
LD7 Batterie grün 1 3 A2/C
LD8 FAIL rot * * A2/C
LD9 ALARM rot 4321 4 A2/C
LD10 Lauflicht 3 grün 8 3 A2/C
LD11 Vor-Alarm gelb 8765 2 A2/C
LD12 Verschlussalarm rot 8 4 A2/C
LD13 Lauflicht 2 grün 7 3 A2/C
LD14 Alarm Infus. Ende gelb 1 1 A2/C
LD15 Lauflicht 1 grün 6 3 A2/C
LD16 Alarm Entkopplung rot 5 4 A2/C
LD17 ml grün 4 3 A2/C
LD18 KVO. rot 1 2 A2/C
LD19 Spritzenauswahl grün 7 1 A2/C
LD20 Spritzenauswahl grün 4 1 A2/C
Page 26

LD21 PC-Anschluß grün 4 2 C
: Die Netz LED, angesteuert durch das Signal LDSECT 10 mA, das von der
Motorsteuerungskarte erzeugt wird, und die FAIL-Diode, die durch das Signal FAIL (TTL) beim RESET aktiv und vom
Die Tastatur ist eine Matrizentastatur, bestehend aus 18 Tasten in Anordnung 6x3 sowie 2 unabhängigen Tasten TON und
Die Säulen der Tastatur werden von den Steuersignalen der Kathoden der Dioden der bei 0 aktiven Signale COL/ DIG1 bis
LD22 ml/h grün 3 3 A2/C
LD23 Alarm Batterie rot 2 1 A2/C
LD24 Grenzvolumen grün 2 2 A2/C
LD25 Spritzenauswahl grün 6 1 A2/C
LD26 Spritzenauswahl grün 5 1 A2/C
LD27 Ruf Validierung grün 2 3 A2/C
LD28 Master-Anschluss grün 7 2 C
LD32 LED Typ 1 grün 1 9 A2/C
LD33 LED Typ 2 grün 2 9 A2/C
LD34 LED Typ 3 grün 3 9 A2/C
2.3.2.1.2. 7 Segment Anzeigen
4 Anzeigeelemente 10 mm IC1, IC2 IC3 IC8 und 1 Anzeigeelement 7 mm IC4.
IC1 Hunderter DIGIT 5
IC2 Zehner DIGIT 6
IC3 Einer DIGIT 7
IC4 Zehntel DIGIT 8
IC8 Tausender DIGIT 2
2.3.2.1.3. LED außerhalb der Matrix
2 Dioden befinden sich außerhalb der Matrix
Mikroprozessor gesteuert wird.
2.3.2.1.4. Tastaturinterface
TOFF mit gemeinsamen GND, die an J2 angeschlossen sind.
J2.1 Säule 1
J2. 2 Säule 2
J2. 3 Säule 3
J2. 4 Säule 4
J2. 5 Säule 5
J2. 6 Säule 6
J2. 7 Zeile 1
J2. 8 Zeile 2
J2. 9 Zeile 3
J2. 10 TON
J2. 11 TOFF
J2. 12 GND
COL/DIG6 angesteuert. Die Dioden D1 bis D6 ermöglichen die einwandfreie Funktion der Anzeigen.
Wenn das Signal COL/DIG bei 0 liegt, und eine Taste gedrückt wird, wird die entsprechende Zeile auf 0 gesetzt.
Die Abfrage der Tastatur läuft synchron mit der Anzeige.
Säule Zeile Taste Pilot
1 1 Stop A2/C
1 2 Start A2/C
1 3 Alarm Unterdrückung A2/C
2 1 - Zehner A2/C
2 2 - Hunderter A2/C
2 3 Bolus A2/C
3 1 + Einer A2/C
3 2 + Zehner A2/C
3 3 + Hunderter A2/C
Page 27

4 1 - Einer A2/C
Das LCD-Display besteht aus dem IC7(COP 472-3 ) von N.S und der Customanzeige FRESENIUS VIAL. Diese Anzeige
Der COP 472.3 Treiber wird durch den SPI-Bus angesteuert, dessen TTL Signale auf dem J3-Stecker der Anzeigenplatine
Er wird angesteuert durch das Buzzsignal, das von der UC-Karte generiert wird und an J3 Pin 6 abgegriffen werden kann.
4 2 Volumenende C
4 2 infundiertes Volumen A2
4 3 infundiertes Volumen C
5 1 Clear Volumen C
5 2 Keine Taste A2/C
5 3 Keine Taste A2/C
6 1 Keine Taste A2/C
6 2 Einstellung Gegendruck C
6 3 Zugang Modul C
2.3.2.2. Die L.C.D Anzeige
dient der Darstellung des Gegendruckes des Spritzenkolbens.
zu messen sind.
CLK Takt J3 Pin 4
SI Prozessorbefehle Peripherie J3 Pin 3
CSLCD Wahl des Drivers J3 Pin 5
2.3.2.3. Der Buzzer
Der Buzzer ist vom Typ STAR TMB 05 und wird durch VBAT versorgt.
Er ist parallel zum Schwesternrufrelais angeordnet.
2.3.3. Beschreibung der Verbindungen
2.3.3.1. J1 Verbindungsleitung UC Karte
Pin Beschreibung
1 SEG1 Anzeigenmatrix Zeile 1
2 SEG2 Anzeigenmatrix Zeile 2
3 SEG3 Anzeigenmatrix Zeile 3
4 SEG4 Anzeigenmatrix Zeile 4
5 SEG5 Anzeigenmatrix Zeile 5
6 SEG6 Anzeigenmatrix Zeile 6
7 SEG7 Anzeigenmatrix Zeile 7
8 SEG8 Anzeigenmatrix Zeile 8
9 COL1 Anzeigenmatrix Säule 1
10 COL2 Anzeigenmatrix Säule 2
11 COL3 Anzeigenmatrix Säule 3
12 FAIL Steuerung Diode FAIL
13 COL/DIG 9 Steuerung LED Typ “
14 LIG1 Tastatur Interface Zeile 1
15 LIG2 Tastatur Interface Zeile 2
16 LIG3 Tastatur Interface Zeile 3
17 LDSECT Leuchtsteuerung LED Netz
18 +5V Versorgung
19 VBAT Versorgung
20 GND Versorgung
Page 28

2.3.3.2. J2 Folienanzeige
Pin Beschreibung
1 Säule 1
2 Säule 2
3 Säule 3
4 Säule 4
5 Säule 5
6 Säule 6
7 Zeile 1
8 Zeile 2
9 Zeile 3
10 TON
11 TOFF
12 GND Versorgung
2.3.3.3. J3 Verbindungsleitung UC Karte
Pin Beschreibung
1 TON Taste ON
2 TOFF Taste OFF
3 SI Bus SPI
4 CLK Bus SPI
5 CSLCD Bus SPI
6 BUZZ Steuerung BUZZER
7 VBAT Versorgung
8 GND Versorgung
2.3.4. Verbrauch
Von VBAT :
Min Typ Max
Gesamtverbrauch der Karte mit allen LED´s an 160 200 mA
Batteriebetrieb 100 120 mA
An 5V kleiner als 10 mA.
Page 29

3. Konfiguration, Kalibration und Kontrollen
Die vorgestellten Möglichkeiten sind insbesondere nützlich, um das Gerät den jeweiligen Bedürfnissen des Kunden
FRESENIUS VIAL empfiehlt, dass bei der Gerätekonfiguration der firmeneigene Außendienst bzw. ein Medizintechniker
Die Bestätigungstaste blinkt nun.. Drücken Sie innerhalb von 2 Sekunden auf die BESTÄTIGUNGSTASTE, um den
Durch die Aufwärts-/Abwärtstasten Tasten können nun die Parameter gewechselt werden. Folgende Parameter stehen zur
Erscheint der gewünschte Parameter, so können Sie diesen durch drücken der BESTÄTIGUNGSTASTE verändern. Nach
Das Drucklimit bei der Inbetriebnahme ist die gleiche wie das, das für die letzte Verwendung gewählt wurde.
Bei Zugang der Konfiguration wird die jeweils aktuelle Auswahl angezeigt: NIV3 oder VAr1. Die 3 LCD Balken für NIV3. Nur
der dritte Balken bei VAr1. Durch die Aufwärts-/Abwärtstasten Tasten können nun die Parameter gewechselt werden.
3.1. Konfiguration
3.1.1. Konfigurationsmöglichkeiten des Druckparameters
q Wichtig : Diese Konfigurationsmöglichkeit gilt nur für die Pilot C
anzupassen.
anwesend ist.
Anmerkung : Es besteht jederzeit die Möglichkeit, das Konfigurationsmenü zu verlassen, indem Sie auf OFF drücken.
3.1.1.1. Zugang zur Konfiguration der Druckeinstellung
1. Der Zugang zum Konfigurationsmodus wird durch gleichzeitiges Drücken der Tasten ( siehe unten) erreicht:
+
Es wird nun „PrE1“ auf dem Display angezeigt.
Eingang in den Konfigurationsmodus zu bestätigen. Es erscheint „PrES1“ im Display.
Verfügung :
q PrES1 : Verschlussalarmmöglichkeiten.
q PrES2 : Änderung des unteren, mittleren und oberen Drucklimits.
q PrES3 : Alarmgebung Druckabfallschwelle.
q PrES4 : Druckanzeige ja / nein.
dem Konfigurieren dieses Parameters können Sie zum Nächsten übergehen.
Die Konfiguration wird abgeschlossen durch einen Druck auf die OFF- Taste.
3.1.1.2. Verschlussalarmmöglichkeiten (PrE1)
Diese Konfiguration ermöglicht die Wahl von 2 Modi:
q NIV3 : 3 vorgegebene Abschaltdrücke (unteren, mittleren, oberen) mit der Möglichkeit, während des
Betriebes zwischen den 3 Ebenen zu wählen.
q VAr1 : Variabler Abschaltdruck während des Betriebes in 50mm Hg Schritten
Es gibt zwei Arten die Drucklimits zu Speichern:
q
q Das Drucklimit bei der Inbetriebnahme ist das selbe wie das der Konfiguration.
Folgende Parameter stehen zur Verfügung: Durch Tasten kann zwischen beiden Arten gewechselt werden.
Ein Druck auf die Bestätigungstaste bestätigt den angezeigten Modus.
Wurde Var1 oder NIV3 ausgesucht, so sind durch Tasten folgende Änderungen möglich :
q - - - - Das Drucklimit (Modus Var1) oder das Drucknivau (Modus NIV3), angeboten bei Inbetriebnahme, ist
gleich dem letzten Nivau (Modus NIV3) oder letzten Wert (Modus Var1) bei Betrieb.
q (Modus Var1) von100 bis 900 mm Hg : Ausgesuchter Druckspitzenwert beim Einschalten des Gerätes.
q (Modus NIV3 ) 1,2 oder 3 : Ausgesuchter Druckwert beim Einschalten des Gerätes.
Ein Druck auf die Stoptaste löscht die vorgenommene Änderung.
q Anmerkung : Es besteht jederzeit die Möglichkeit, das Konfigurationsmenü zu verlassen, indem Sie auf
OFF drücken.
Page 30

3.1.1.3. Drucklimits (PrE2)
Bei Beginn der Konfiguration leuchtet der erste Balken im LCD Display und ein kleiner Strich erscheint im 1/10 Fenster.
Durch einen Tastendruck auf Bestätigen gelangen Sie in den mittleren Druckbereich. Im 1/10 Fenster erscheinen nun zwei
Durch einen Tastendruck auf Bestätigen gelangen Sie in den hohen Druckbereich für 50/60 ml Spritzen. Die 3 Balken des
Durch einen erneuten Tastendruck auf Bestätigen gelangen Sie in andere Spritzenvolumen, die ebenfalls auf diese Weise
Der Mindestwert für die mittlere und hohe Grenze hängt von dem unteren ab ; zwischen 2 Werten muss ein Mindeswert von
Beim Bestätigen des letzten hohen Drucks bestätigen Sie auch alle anderen geänderten Drücke. Durch Drücken der STOP
Diese Konfiguration ermöglicht die Einstellung eines dynamischen Druckabstiegs während einer Infusion. Einen Alarm wird
Beim Aufruf des Parameters wird der aktuelle Wert blinkend angegeben. Die dazugehörige Anzeige blinkt. Die Tasten
speichern Sie die gewünschte Auswahl. Durch Drücken auf die STOP – Taste
AFF : Ein Tastendruck auf die Taste „Druckbegrenzung“ ruft eine Anzeige hervor die zwischen dem Druck in
Für dieser Konfiguration können die Druckspitzenwerte angepasst justiert werden, gemäss Modus 3 gibt es voreingestellte
3 Schwellen:
q Wert des gemeinsamen unteren Drucks unabhängig von Spritzentyp.
q Wert des gemeinsamen mittleren Drucks unabhängig von Spritzentyp.
q Wert der hohen Drücke für jeden Spritzentyp.
Die hohen Druckwerte dienen gleichermaßen als max-Druck im Modus 1, variable Schwelle.
Nun können Sie über die Aufwärts-/Abwärtstasten Tasten den Druck einstellen.
kleine Striche.
LCD Displays sind nun an. Der maximale Druck wird blinkend angezeigt. Die LED der 50ml Spritzen leuchtet..
Das Blinken hört auf, sobald ein Wert geändert wird.
verändert werden können.
100 mm Hg vorhanden sein. Das Maximum für die hohen Drücke ist 900 mm HG.
Zusammenfassende Darstellung der Min/Max - Grenzen
min 50 mm HgUnterer Druckbereich
max. 300 mm Hg
min Unterer Druckbereich + 100 mm HgMittlerer Druckbereich
max. 800 mm Hg
min Mittlerer Druckbereich + 100 mm HgHoher Druckbereich
max. 900 mm Hg
– Taste können Sie jederzeit die zuvor geänderten Werte aller Bereiche rückgängig machen.
Anmerkung : Es besteht jederzeit die Möglichkeit, das Konfigurationsmenü zu verlassen, indem Sie auf OFF drücken..
3.1.1.4. Alarmgebung Druckabstiegsschwelle (PrE3)
ausgelöst, wenn dieser Schwellwert während einer Infusion überstiegen wird.
ermöglichen eine Änderung des Wertes:
q Minimale Schwelle: 50 mm Hg
q Maximale Schwelle: 900 mm Hg
Durch ein Tastendruck auf Bestätigen
können Sie jederzeit den zuvor geänderten Wert korrigieren.
Eine Einstellung auf 0 mm Hg bewirkt eine Abschaltung dieser Funktion.
Anmerkung :Es besteht jederzeit die Möglichkeit, das Konfigurationsmenü zu verlassen, indem Sie auf OFF drücken.
3.1.1.5. Druckanzeige ja / nein (PrE4)
Diese Konfiguration ermöglicht das Anzeigen des Drucknivaus und des effektiven Spritzendrucks im Wechsel:
q
der Spritze und dem Balken wechselt.(unteren, mittleren hohen oder variable).
q noAF : Nur der Grenzwert wird angezeigt.
Page 31

Beim Aufruf des Parameters wird die aktuelle Einstellung angezeigt : AFF oder no AFF. Die Aufwärts-/Abwärtstasten
ermöglichen nun das Wechseln der Parameter.
speichern Sie die gewünschte Auswahl. Ein Druck auf die STOP-Taste annulliert
Es wird nun „Par.1“ auf dem Display angezeigt. Die Bestätigungstaste blinkt nun. Drücken Sie innerhalb von 3 Sekunden
auf die BESTÄTIGUNGSTASTE, um den Eingang im Konfigurationsmodus zu bestätigen. Die Aufwärts-/Abwärtstasten
Wenn der gewünschte Parameter angezeigt wird, können Sie durch Drücken der Bestätigungstaste zu dem Parameter
Diese Konfiguration bietet Ihnen die Möglichkeit zu wählen, ob Sie die zuletzt eingestellte Förderrate bei der nächsten
Beim Zugang dieses Parameters wird Ihnen der aktuelle Modus angeboten: MEM oder noMEM . Die Aufwärts-
speichern Sie gewünschte Auswahl. Ein Druck auf die STOP-Taste annulliert die
Durch einen Tastendruck auf Bestätigen
die durchgeführten Änderungen.
Anmerkung : Es besteht jederzeit die Möglichkeit, das Konfigurationsmenü zu verlassen, indem Sie auf OFF drücken..
3.1.2. Konfiguration der verschiedenen angebotenen Parameter
3.1.2.1. Zugang zur Konfiguration diverser Parameter
Der Zugang wird aktiviert, indem Sie gleichzeitig die Tasten drücken ( siehe Bild) und das Gerät einschalten .
Tasten ermöglichen nun das Wechseln der Parameter.
gelangen, den Sie ändern wollen. Nach dem Bestätigen Ihrer Änderung können Sie mit weiteren Parametern fortfahren.
Folgende Parameter werden zur Konfiguration angeboten:
q PAr1, Pilot A2/C: Förderratenspeicher AN / AUS.
q PAr2, Pilot A2/C: Spritzenbestätigungsmöglichkeit.
q PAr3, Pilot A2/C: Förderratenbegrenzung.
q PAr4, Pilot A2/C: Spritzenauswahl.
q PAr5, Pilot A2/C: Zwangsgeführtes Entlüften JA / NEIN.
q PAr6, Pilot C: Infusionsschnellstart JA / NEIN. (Nicht bei Pilot A2)
q PAr7, Pilot A2/C: KVO Betrieb JA / NEIN.
q PAr9, Pilot A2/C: Wahl der Übertragungsgeschwindigkeit RS232.
q PArA, Pilot C: Modus Spritzenentleerung JA / NEIN. (Nicht bei Pilot A2)
q PArb, Pilot A2/C: Serviceintervallanzeige
q PArc, Pilot A2/C: Medikamentennamen
q PArd, Pilot A2/C: Spritzenpositionserkennung.
q PArF, Pilot A2/C: Bolusratenspeicher
q PArG, Pilot A2/C: Programmierung von Medikamentennamen.
q PArJ, Pilot A2/C: Aktivierung JA / NEIN Netzausfallsalarm.
q ParO, Pilot A2/C Datum ,Echtzeituhr.
Die Konfiguration wird beendet durch Ausschalten der Pilot mittels OFF-Taste.
3.1.2.2. Förderratenspeicher AN / AUS (PAr1)
Inbetriebnahme des Geräts haben wollen oder nicht:
q MEM : Speicherung der zuletzt eingestellten Förderrate beim Ausschalten
und Vorschlag bei Wiederinbetriebnahme.
q noME : Es wird Ihnen immer 0.0 ml/h bei der Inbetriebnahme angeboten
/Abwärtstasten ermöglichen nun das Wechseln der Parameter.
Durch einen Tastendruck auf Bestätigen
durchgeführten Änderungen.
Page 32

3.1.2.3. Spritzenbestätigungsmöglichkeit (PAr2)
Beim Zugang dieses Parameters wird Ihnen der aktuelle Modus angeboten: SEL3 oder SEL4. Die Aufwärts-/Abwärtstasten
speichern Sie die gewünschte Auswahl. Ein Druck auf der STOP-Taste annulliert
l automatisch in Par4 Spritzenauswahl bei der nächsten
Anmerkung: Es besteht jederzeit die Möglichkeit, das Konfigurationsmenü zu verlassen, indem Sie auf OFF
Diese Konfiguration bietet Ihnen die Möglichkeit, die maximale einstellbare Förderrate für jeden anwählbaren Spritzentyp zu
In einer ersten Phase können Sie den Spritzentyp auswählen, an dem Sie eine Förderratenmaximumänderung vornehmen
möchten. Die 4 Anzeigeelemente zeigen Ihnen den ersten Typ. Mit den Aufwärts-/Abwärtstasten können Sie dann die
anderen Typen aussuchen: 50 ml, 20 ml,. Ist der gewünschte Typ angezeigt, so können Sie durch Tastendruck auf
Beim Zugang dieses Parameters geht eine LED für das Volumen an. Die der aktiven und auswählbaren Spritzentypen
Diese Konfiguration gibt Ihnen die Möglichkeit, zwischen 2 Modi der Spritzenauswahl zu wählen:
q SEL3 : Automatische Bestätigung einer einzigen Spritzenart.
q SEL4 : Anbieten der verschiedenen Spritzentypen,dann Bestätigung.
ermöglichen nun das Wechseln der Parameter.
Durch einen Tastendruck auf Bestätigen
die durchgeführten Änderungen.
Wenn Sie die Einstellung SEL3 wählen, geht die Pilot
Inbetriebnahme, sollte es mehr als einen Spritzentyp geben.
drücken.Anmerkung.
3.1.2.4. Förderratenbegrenzung (PAr3)
definieren.
Bestätigen die maximale Förderrate für diesen Typ ersehen:
Mit den Aufwärts-/Abwärtstasten können Sie nun die maximale Förderrate wie gehabt einstellen.
Die maximal einstellbaren Förderraten sind spritzenabhängig.
Tabelle mit den maximalen Förderrateneinstellungen:
Pilot A2 Pilot C
Spritzentyp
50/60 ml 20 ml 50/60 ml 20 ml
Förderrate (ml/h) min 0.1 0.1 0.1 0.1
max. 400 200 800 400
Anmerkung: Es besteht jederzeit die Möglichkeit, das Konfigurationsmenü zu verlassen, indem Sie auf OFF drücken.
3.1.2.5. Spritzenauswahl (Par 4)
Diese Konfiguration bietet Ihnen die Möglichkeit, jede aktive Spritze anwählbar zu machen (oder nicht):
q SEL : Spritze wählbar, wird angeboten bei der Spritzenauswahl.
q noSE : Spritze nicht wählbar, wird nicht angeboten bei der Spritzenauswahl.
Bei der Konfiguration können Sie sich den Namen der Spritze durch einen Druck auf die Zehntel-Taste anzeigen lassen
Die Auswahl findet für jede Spritzenart und -Typ statt die am Gerät eingesetzt werden können.
leuchten ebenfalls.
Beispiel:
Page 33

Die Anzeige der ersten aktiven Spritze blinkt und es erscheint SEL oder noSEL, je nach Wählbarkeit oder Nichtwählbarkeit.
Die Zehner- u. .die Einer-Tasten ermöglichen den Wechsel zwischen wählbar und nicht wählbar bzw. umgekehrt. Ein
Tastendruck auf die Bestätigungstaste bestätigt den angezeigten Zustand und es geht zum nächsten Typ. Die
Die Anzeige der nächsten Spritze (aktive) blinkt nun und es erscheint erneut SEL oder no SEL. Nach der Wahl und der
Die Spritzenauswahl findet durch Autovalidierung statt (SEL3), entweder, weil es keine oder aber mehrere auswählbare
Diese Konfiguration bietet Ihnen die Möglichkeit, zu wählen, ob ein zwangsgeführtes Entlüften nach der Spritzenauswahl
Beim Zugang dieses Parameters wird der aktuelle Zustand angezeigt: PurGE oder noPrG. Durch die Aufwärts-
speichern Sie gewünschte Auswahl. Ein Druck auf die STOP-Taste annulliert die
Augenblick des Startens bis zum Kontakt des Spritzenkolben schneller vorgeschoben. Dieser Vorschub wird
Beim Zugang dieses Parameters wird der aktuelle Zustand angezeigt: StArt oder noStA. Durch die Aufwärts-/Abwärtstasten
speichern Sie gewünschte Auswahl. Ein Druck auf der STOP -Taste annulliert die
Beim Zugang dieses Parameters wird der aktuelle Zustand angezeigt: KVO oder noKVO. Die Aufwärts-/Abwärtstasten
Typenanzeige, die blinkte, geht an oder aus, je nach dem, ob dieser Typ wählbar geworden ist oder nicht.
Bestätigung des gewollten Zustandes geht man zur nächsten und so weiter bis zur Bestätigung der letzten aktiven Spritze.
Die LED der nächsten Spritzenart geht nun an.
Unter folgenden Umständen wird diese Konfiguration bei Inbetriebnahme automatisch aufgerufen:
Spritzen gibt.
Anmerkung: Es besteht jederzeit die Möglichkeit, das Konfigurationsmenü zu verlassen, indem Sie auf OFF drücken.
3.1.2.6. Zwangsgeführtes Entlüften JA / NEIN (PAr5)
durchgeführt werden muss oder nicht:
q PurG : Zwangsgeführtes Entlüften; Das Modul erwartet nun einen Tastendruck auf der BOLUS –Taste,
bevor Sie nach der Spritzenauswahl, die gewünschte Förderrate eingeben können.
q noPu : Kein zwangsgeführtes Entlüften; Das Modul erwartet eine Förderrateneingabe nach der
Spritzenauswahl.
/Abwärtstasten können die Parameter gewechselt werden.
Durch einen Tastendruck auf Bestätigen
durchgeführten Änderungen.
Anmerkung : Es besteht jederzeit die Möglichkeit, das Konfigurationsmenü zu verlassen, indem Sie auf OFF drücken..
3.1.2.7. Infusionsschnellstart JA / NEIN (PAr6) (nur für Pilot C/CE2 ).
Diese Konfiguration bietet Ihnen die Möglichkeit einen Infusionsschnellstart zu aktivieren oder nicht :
q StAr : Infusionsschnellstart; Sollte die eingestellte Infusionsrate klein sein, so wird der Schieber im
durch den Druckwächter überwacht und ist begrenzt.
q noSt : Kein Infusionsschnellstart; Die Perfusion beginnt immer mit der eingestellten Geschwindigkeit, auch
wenn sie sehr klein ist.
können die Parameter gewechselt werden.
Durch ein Tastendruck auf Bestätigen
durchgeführten Änderungen.
Anmerkung Es besteht jederzeit die Möglichkeit, das Konfigurationsmenü zu verlassen, indem Sie auf OFF drücken..
3.1.2.8. KVO Betrieb JA / NEIN (PAr7)
Diese Konfiguration bietet Ihnen die Möglichkeit, den KVO-betrieb zu nutzen (oder nicht).
q KVO : KVO Betrieb; die Perfusion geht mit 1.0 ml/h weiter (oder weniger, wenn die
Förderrate kleiner ist), wenn das infundierte Volumen erreicht ist.
q noKV : kein KVO Betrieb; die Perfusion bleibt mit Alarmgebung stehen, wenn das infundierte Volumen
erreicht ist.
ermöglichen nun das Wechseln der Parameter.
Page 34

Durch einen Tastendruck auf Bestätigen
speichern Sie gewünschte Auswahl. Ein Druck auf die STOP-Taste annulliert die
Beim Zugang dieses Parameters wird der aktuelle Zustand angezeigt: 19K2, 9600, oder 4800. Mit den Aufwärts-
speichern Sie gewünschte Auswahl. Ein Druck auf die STOP-Taste annulliert die
Beim Zugang dieses Parameters wird der aktuelle Zustand angezeigt: SUIdE oder noSU. Mit den Aufwärts-/Abwärtstasten
speichern Sie gewünschte Auswahl. Ein Druck auf die STOP-Taste annulliert die
Beim Zugang dieses Parameters wird Ihnen der aktuelle Wert angegeben, z.B. 3000 h. Die Aufwärts-/Abwärtstasten
speichern Sie gewünschte Auswahl. Ein Druck auf die STOP-Taste annulliert die
Diese Konfiguration bietet Ihnen die Möglichkeit zu wählen, ob der Medikamentenname angezeigt wird oder nicht
durchgeführten Änderungen.
Anmerkung: Es besteht jederzeit die Möglichkeit, das Konfigurationsmenü zu verlassen, indem Sie auf OFF drücken.
3.1.2.9. Geschwindigkeit der RS232 Schnittstelle (Par 9)
Mit dieser Konfiguration können Sie die RS232 Geschwindigkeit wählen.
q 19K2 : 19200 Bauds (Standardwert)
q 9600 : 9600 Bauds
q 4800 : 4800 Bauds
/Abwärtstasten können Sie nun die Geschwindigkeiten wechseln.
Durch einen Tastendruck auf Bestätigen
durchgeführten Änderungen.
Anmerkung: Es besteht jederzeit die Möglichkeit, das Konfigurationsmenü zu verlassen, indem Sie auf OFF drücken.
3.1.2.10. Modus Spritzenentleerung JA / NEIN (ParA) [Nicht bei Pilot A2 anwenden]
Diese Konfiguration bietet Ihnen die Möglichkeit zu wählen, ob die Pilot mit Spritzenentleerung arbeiten soll oder nicht.
q SUId : Aktivierung des Modus Spritzenentleerung
q noSU : Deaktivierung des Modus Spritzenentleerung.
können Sie nun die Parameter wechseln.
Durch einen Tastendruck auf Bestätigen
durchgeführten Änderungen.
Anmerkung : Es besteht jederzeit die Möglichkeit, das Konfigurationsmenü zu verlassen, indem Sie auf OFF drücken.
3.1.2.11. Serviceintervall anzeige (Parb)
Diese Konfiguration bietet Ihnen die Möglichkeit, das Serviceintervall zu bestimmen.
q Auswahl eines Wertes zwischen 1 und 9999 Betriebsstunden.
ermöglichen nun das Ändern dieses Wertes.
Durch einen Tastendruck auf Bestätigen
durchgeführten Änderungen.
Anmerkung : Es besteht jederzeit die Möglichkeit, das Konfigurationsmenü zu verlassen, indem Sie auf OFF drücken.
3.1.2.12. Medikamentennamen (Par C)
(4 erste Buchstaben).
q druG : Nach dem Bestätigen der Spritze können Sie einen von 15 Namen aussuchen.
q nodr : Nach dem Bestätigen der Spritze können Sie keinen Namen aussuchen.
Page 35

Beim Zugang dieses Parameters wird der aktuelle Zustand angezeigt: druG oder nodr. Die Aufwärts-/Abwärtstasten
ermöglichen das Wechseln zwischen den beiden Zuständen.
speichern Sie gewünschte Auswahl. Ein Druck auf die STOP-Taste annulliert die
Diese Konfiguration bietet Ihnen die Möglichkeit, zwischen einen Betrieb mit Spritzenposition-Erkennung oder
Beim Zugang dieses Parameters wird der aktuelle Zustand angezeigt: AILE oder noAI. Die Aufwärts-/Abwärtstasten
speichern Sie gewünschte Auswahl. Ein Druck auf die STOP-Taste annulliert die
Beim Zugang dieses Parameters wird der aktuelle Zustand angezeigt: MEM oder noMEM. Die Aufwärts-/Abwärtstasten
speichern Sie gewünschte Auswahl. Ein Druck auf die STOP-Taste annulliert die
Wenn noMEM gewählt wurde, geht die LED der Spritzenart (z.B. 50 cc) an und die Einleitungsförderrate wird auf der 7
Segmentanzeige dargestellt. Die Aufwärts-/Abwärtstasten ermöglichen das Wechseln des Wertes. Nach der Validierung
Beim Zugang in die Konfiguration werden Ihnen die 4 ersten Buchstaben des ersten Namens angezeigt, der linke erste
wählen Sie nun den gewünschten Buchstaben (von A bis Z mit
Durch einen Tastendruck auf Bestätigen
durchgeführten Änderungen.
Anmerkung : Es besteht jederzeit die Möglichkeit, das Konfigurationsmenü zu verlassen, indem Sie auf OFF drücken.
3.1.2.13. Spritzenpositionserkennung (Par d)
ohne zu wählen.
q AiLE : Betrieb mit Spritzenpositionserkennung.
q noAi : Betrieb ohne Spritzenpositionserkennung.
ermöglichen nun das Wechseln zwischen den beiden Zuständen.
Durch einen Tastendruck auf Bestätigen
durchgeführten Änderungen.
Anmerkung : Es besteht jederzeit die Möglichkeit, das Konfigurationsmenü zu verlassen, indem Sie auf OFF drücken.
3.1.2.14. Einleitungsförderratenspeicher (Par F)
Diese Konfiguration bietet Ihnen die Möglichkeit, zwischen 2 Arten der Förderratenspeicherung zu wählen.
q MEM : Die Förderate bei Inbetriebnahme ist die, die zuletzt verwendet wurde.
q noME : Die Förderate bei Inbetriebnahme ist immer die gleiche.
ermöglichen nun das Wechseln der Parameter.
Durch einen Tastendruck auf Bestätigen
durchgeführten Änderungen.
geht es weiter mit eine anderen Spritzenkapazität und so weiter.
Anmerkung : Es besteht jederzeit die Möglichkeit, das Konfigurationsmenü zu verlassen, indem Sie auf OFF drücken.
3.1.2.15. Programmierung von Medikamentennamen (Par G)
Mit dieser Konfiguration kann die Namensliste der Medikamente programmiert werden.
Buchstabe blinkt.
Mit den Tasten,
" - " für Leerzeile).
Durch Bestätigung des Buchstabens gelangen Sie zum nächsten.
Durch Bestätigung des letzten Buchstabens gelangen Sie zum nächsten Namen.
Ein Tastendruck auf der Zehntel-Taste lässt den nächsten Namen erscheinen.
Anmerkung : Es besteht jederzeit die Möglichkeit, das Konfigurationsmenü zu verlassen, indem Sie auf OFF drücken.
3.1.2.16. Aktivierung JA / NEIN Netzausfallalarm (PArJ)
Diese Konfiguration bietet Ihnen die Möglichkeit, ein Warn-bip bei Netzausfall zu aktivieren oder nicht.
q SEC.t : Detektion des Netzausfalls.
q noS.E : keine Detektion des Netzausfalls.
Beim Zugang dieses Parameters wird der aktuelle Zustand angezeigt: SEC.t oder noS.E. Die Aufwärts/Abwärtstasten ermöglichen nun das Wechseln der Parameter:
Page 36

3.1.2.17 Datum und Uhrzeit (PArO)
Diese Konfiguration bietet Ihnen die Möglichkeit Datum und Uhrzeit einzustellen
«Blinkende» Zahl +d = Einstellung Tag
«Blinkende» Zahl +n = Einstellung Monat
«Blinkende» 2003 = Einstellung Jahr
«Blinkende» Zahl +h = Einstellung Stunde
«Blinkende» Zahl +h = Einstellung Minute
3.1.3. Ansichtstafel Spritzentyp / Anzeigenamen
Firma Volumen Anzeige Firma Volumen Anzeige
BD Perfusion 50 BPf Fresenius Injectomat 50 FrI
BD Plastipak 50 BDk Fresenius P Spritze 50 FrP
BD Plastipak 20 BDk Ivac 50 IVa
Braun Omnifix 50 BrO Map Gliss L L 50 MLL
Braun Omnifix 20 BrO Map Pic L L (Indolor) 50 MPL
Braun Perfusor 50 BrP Sherwood Monoject 50 SMJ
Braun Perfusor 20 BrP Sherwood Monoject 20 SMJ
Didactic Line France 50 DiL Terumo 50 Trm
Didactic Perfusion 50 DiP Terumo 20 Trm
Dispomed Spritze 50 Dis Tutoject type T 50 TJT
Dispomed type P 50 DsP Zeneca PFS 50 ZEN
Page 37

3.2. Kalibriermodus
Der Kalibriermodus wird durch gleichzeitiges Drücken der Ein-Taste und der Bolus-Taste bei der Inbetriebnahme des
+
nicht
Die Aufwärts-/Abwärtstasten ermöglichen es Ihnen nun, den Geheimkode
. Die 7 Segmentanzeige zeigt nun "EtA" gefolgt von einer Zahl. Die
Durch Drücken der STOP-Taste kann der jeweilige Kalibriervorgang abgebrochen werden, ohne die eingestellten Werte zu
" im Display. Nun müssen Sie das Gerät durch Ersetzen der Batterie
mittels externer Spannungsversorgung mit genau 6,3V ± 0,05 V versorgen. Ein Bestätigen mit der Bestätigungstaste
" im Display. Nun müssen Sie das Gerät durch Ersetzen der Batterie
ersorgen. Ein Bestätigen mit der Bestätigungstaste
" im Display. Nun müssen Sie das Gerät durch Ersetzen der Batterie
mittels externer Spannungsversorgung mit genau 5,7 V ± 0,05 V versorgen. Ein Bestätigen mit der Bestätigungstaste
und
und schieben den Schieberkopf
. im Display, ohne dass eine Kraft auf den Schieber ausgeübt wird. Sollte
dies nicht der Fall sein, den Potentiometer P1 einstellen (auf der Versorgungsplatine) eine Spg von 0,6 V ± 0,05 V zwischen
ar am
MCM Druckdynamometer). Ein Bestätigen mit der Bestätigungstaste schreibt diesen Wert ins EEPROM. Danach erscheint
Achtung : Sie können nur in den Konfigurationsmodus gelangen, wenn Sie das Passwort kennen.
Gerätes aufgerufen.
Die 7 Segmentanzeige zeigt "EtA" an und die Bestätigungs-LED blinkt. Sollte ein Tastendruck auf Bestätigen
binnen 3 Sekunden erfolgen, so gehen Sie wieder in den normalen Modus zurück.
Die 7 Segmentanzeige zeigt nun 000.0
einzugeben, danach müssen Sie diesen Bestätigen
grünen Tasten ermöglichen dann das Wechseln zwischen den Modi.
verändern.
q EtA 4, Pilot A2/C: Kalibrierung der 3 Akkuspannungsschwellen
q EtA 6, Pilot A2/C: Kalibrierung der Vorschubkontrolle
q EtA 9, Pilot C: Kalibrierung des Drucksensors
3.2.1. EtA 4
Bestätigungstaste drücken: Es erscheint "Bat1Bat1
schreibt diesen Wert ins 'EEPROM.
Bestätigungstaste drücken: Es erscheint "Bat2"Bat2
mittels externer Spannungsversorgung mit genau 5,9 V ± 0,05 V v
schreibt diesen Wert ins 'EEPROM.
Bestätigungstaste drücken: Es erscheint "Bat3"Bat3
schreibt diesen Wert ins 'EEPROM. Danach erscheint wieder "EtA 4" und Sie können die nächste Kalibrierung anwählen.
3.2.2. EtA 6
Bestätigungstaste drücken: Es erscheint "HighHigh", im Display. Nun positionieren Sie die 115 mm ± 0,05 mm-Lehre
schieben den Schieberkopf dagegen. Ein Bestätigen mit der Bestätigungstaste schreibt diesen Wert ins EEPROM.
Es erscheint "LowLow", im Display. Nun positionieren Sie die 20 mm ± 0,05 mm-Lehre
dagegen. Ein Bestätigen mit der Bestätigungstaste schreibt diesen Wert ins EEPROM.
Nach dem „ Lernen“ dieser 2 Werte wird ein Kontrollwert angezeigt.
Dieser Wert sollte 776 ± 10 betragen. Ist dieses nicht der Fall, so muss von vorne begonnen werden.
Danach erscheint wieder " EtA 6" und Sie können die nächste Kalibrierung anwählen.
3.2.3. EtA 9 (Pilot C)
Bestätigungstaste drücken: Es erscheint "00 g"g"
J9.4 und Masse J9.1. Ein Bestätigen mit der Bestätigungstaste schreibt diesen Wert ins EEPROM.
Es erscheint "5 Kg5 Kg" im Display. Üben Sie nun eine Kraft von 5 kg ± 50 g auf die Druckplatte aus (entspricht 0,8 Β
wieder "EtA 9", und Sie können die nächste Kalibrierung anwählen.
Page 38

3.3. Testmodus
Anmerkung: Die nachstehend erläuterten Tests beeinflussen die der Okklusion, die der Förderrate, die der elektrischen
nicht
Ein Tastendruck auf der Bestätigungstaste ermöglicht den Zugang in den Modus SAV. Nun können Sie Test 1 im Display
Zunächst ermöglicht dieser Test die Anzeige der Betriebsdauer der Pilot. Ist diese Betriebsdauer niedriger als 9999
Stunden, wird diese Zahl mit vier Stellen angezeigt, gefolgt von einem „H“. Ist dies nicht der Fall, wird die Anzeige in Tagen
”. Dies bedeutet für Sie, dass eine
Sicherheit etc. nicht.
1. 1. 2 Zugang zum Testmodus
Der Testmodus wird durch gleichzeitiges Drücken der Tasten ( Siehe Bild ) aufgerufen.
Die 7 Segmentanzeige zeigt "tSt" an und die Bestätigungs-LED blinkt. Sollte ein Tastendruck auf Bestätigen
binnen 3 Sekunden erfolgen, so gehen Sie wieder in den normalen Modus zurück.
lesen. Die grünen Tasten ermöglichen dann das wechseln zwischen den Modi.
Mögliche Tests:
q “ tSt 1 ” = Betriebszeit mit Reset bei Änderung des Servicedatums.
q “ tSt 2 ” = Test der 7-Segmentanzeigen, LEDs und Lcd-Displays.
q “ tSt 3 ” = Test der Bedienfolie.
q “ tSt 4 ” = Anzeige der Spannung am Akku.
q “ tSt 5 ” = Anzeige der 10 letzten Alarme.
q “ tSt 6 ” = Anzeige der Gesamtbetriebszeit.
q “ tSt 7" = Test Serielle Verbindung TTL
q “ tSt 8" = Test Serielle Verbindung TTL
q “ tSt 9 ” = Anzeige der Kraft auf dem Drucksensor.(Nicht bei Pilot A2)
q “ tSt A ” = Software version.
q “ tSt B ” = Anzeige ADC Analogeingänge.
q “ tSt C ” = Anzeige Schieberkopfposition.
q “ tSt D ” = Test akustischer Signalgeber.
q “ tSt E ” = Anzeige der Kalibrierwerte.
q “ tSt F ” = Anzeige der Spritzengrößen.
q “ tSt G ” = Anzeige der Spritzengruppennummer.
q “ tSt H ” = Kontrolle der Spritzengruppenliste.
3.3.1.1. Betriebsdauer (tESt1)
erfolgen, gefolgt von einem „J“. Ist die Betriebsdauer höher als 9999 Tage, erfolgt die Anzeige in Monaten „M“.
Ist die Betriebsdauer höher als der Wert, der in (parB) gespeichert ist, blinkt “ ctrL
Wartung angebracht ist.
Wenn Sie während des Blinkens auf die Zehntel-Taste drücken, erscheint die Anzahl der Inbetriebnahmen des Gerätes.
Page 39

Durch einen Druck auf die Bestätigungstaste wird das Servicedatum angezeigt. Mit den + / - Tasten lassen sich Tag (d),
Monat (m) und Jahr (y) ändern. Nach der Bestätigung durch Drücken der Bestätigungstaste wird die Gesamtbetriebszeit auf
Nach erneutem Drücken der Bestätigungstaste leuchten anschließend alle Anzeigen in einem Rythmus von 500 ms
Die LCD-Anzeige wird insofern getestet, als dass jedes Segment der Anzeige nacheinander im 500 ms Rhythmus
Durch diesen Test ist es möglich, den einwandfreien Zustand der Tastaturelemente zu überprüfen. Beim Zugang dieses
0 zurückgesetzt. Nach dem Bestätigen gelangen Sie auf die Testebene zurück.
3.3.1.2. Test der 7-Segmentanzeigen, LEDs und des LCD-displays (tSt2)
Mit diesen Test können alle Anzeigen kontrolliert werden.
Durch Drücken der Bestätigungstaste leuchten zuerst alle LEDs und LCDs.
nacheinander auf.
aufleuchtet.
Der Test kann jederzeit durch Drücken der Stop-Taste abgebrochen werden.
3.3.1.3. Test der Bedienfolie (tSt3)
Testes wird zuerst „CLAV“ angezeigt. Durch erneutes Drücken der Bestätigungstaste kann dieser Test gestartet werden.
Der Name der einzelnen Tasten wird beim Drücken in der Anzeige bekannt gegeben:
Anzeige Beschreibung Typ Pilot
SIAL Alarmton-Austaste A2/C
StoP Stoptaste A2/C
VAL Bestätigungstaste A2/C
BoLu Bolustaste A2/C
S -.. + Zehnertaste A2/C
S .-. + Einertaste A2/C
S ..- + Zehnteltaste A2/C
S _.. - Zehnertaste A2/C
S ._. - Einertaste A2/C
S _.. - Zehnertaste A2/C
VLIM Volumenbegrenzungstaste C
VPEr Infundierte Volumentaste A2/ C
VOEf Volumen Löschtaste C
PrES Abschaltdrucktaste C
MASt Mastertaste C
Page 40

Werden mehrere Tasten gleichzeitig gedrückt, erscheint „ERR“ im Display und es ertönt ein akustischer Alarm.
Die Ein-/Austaste ist in diesem Test nicht erfasst und behält ihre Funktion. Um den Test zu beenden, ist die
Dieser Test gibt Ihnen den Spannungswert der Batterie auf der Anzeige. Diese Spannung wird errechnet in Abhängigkeit
Die Batterie und die Netz LED werden ebenfalls aktualisiert. Die BAT LED fängt an zu blinken wenn der angezeigte Wert
Bestätigungstaste 2 Sekunden lang gedrückt zu halten.
3.3.1.4. Anzeige der Spannung am Akku (tSt4)
von den Werten, die hinterlegt sind. Die hinterlegten Werte sind die eines Voralarmes (5,9 V) und eines Alarmes (5,7 V).
Die Anzeige wird in Volt und Zehntel -Volt angezeigt und wird ständig aktualisiert.
unter den eines Voralarm abfällt, und hört auf, wenn die Spannung über diesem Schwellwert liegt.
Durch einen Druck auf die Bestätigungstaste gelangen Sie wieder auf die Testebene.
3.3.1.5. Anzeige der letzten 10 Alarme (tSt5)
Mit diesem Test ist es möglich, die letzten 10 Alarme nachzuvollziehen. Es werden drei Alarmarten gespeichert:
q Alarmauslösungen
q Auftreten von Fehlern
q Das Ausschalten der Pilot. In diesem Fall gibt es zwei Möglichkeiten:
© Normales Ausschalten durch Betätigung der ON/OFF-Taste
© Ausschalten des Gerätes hervorgerufen durch Fehlfunktion
Im Alarmfall erscheint ein „A“ gefolgt von einer Zahl, die einem Fehlercode entspricht:
10 Akkualarm
11 Spritzenniederhalter
12 Infusionsende
13 Volumenvorgabe
14 Entriegelung
15 Spritzenkolbenfixierung
16 Druckbegrenzung
17 Spritzenpositionsanzeige
25 Kalibriermodus
Wenn ein Fehler auftritt, erscheint ein „E“ im Display, gefolgt von einer Codenummer :
Fehler Nr. Beschreibung
50 ADC-Test
60 Überprüfung der Spritzenparameter
70 Motorfrequenz fehlerhaft
80 Tastaturfehler oder elektromagnetische Störung.
90 Spritzendedektierung fehlerhaft
01 Motorrotation fehlerhaft
32 Vorschubkontrolle fehlerhaft
52 Vorschubkontrolle fehlerhaft
72 Vorschubkontrolle fehlerhaft
03 Schnittstellenfehler
Page 41

Die Codenummern 10 (interner RAM-Test, 20 (externer RAM-Test), 30 (Eeprom check-sum-test) und 40 (Eeprom-Zugang)
werden nicht im Eeprom gespeichert.
Hinter dem Dezimalpunkt wird die Position des jeweiligen Fehlers angegeben. Dabei steht 0 für den aktuellsten Fehler, 9 für
Genauso wie bei der Betriebszeit erscheinen die Anzeigen mit „H“, „J“ und „M“. Durch Drücken der Zehnteltaste wird die
die mittels eines Steckers an den RX
und Tx kurzgeschlossen sind (2 und 3), kontrolliert werden. Wenn ein PC mit der Pilot kommuniziert, kann dieser Test nicht
Das Prinzip dieses Testes besteht aus dem Senden einer Buchstabenfolge und der Kontrolle, ob das Gleiche über den
», ansonsten würde
die
mittels eines Steckers, an dem die Leitungen Rx und Tx, RTS und CTS kurz geschlossen sind (2 und 3, 7 und 8). Wenn ein
PC mit der Pilot kommuniziert, kann dieser Test nicht durchgeführt werden. In diesem Falle erscheint OPEN auf der
In dem Falle, wo kein UART 2691 eingebaut ist, würde “NoUA” im Display angezeigt. Durch einen Tastendruck auf die
Das Prinzip dieses Testes besteht aus dem Überprüfen der RTS und CTS – Leitungen. Hierfür ändert die RTS-Leitung
mehrmals ihren Zustand und man kontrolliert, ob man auf der CTS-Leitung das Gleiche empfängt. Der Test ist nicht
» in der Anzeige, ansonsten
Dieser Test zeigt Ihnen die auf den Drucksensor einwirkende Kraft in Gramm an, wobei dieser Wert fortlaufend aktualisiert
Dieser Test zeigt Ihnen die Software-Version an. Durch Drücken der Aufwärts-/Abwärtstaste wird Ihnen die Software-
Wurde das Gerät normal ausgeschaltet, so erscheint „OFF“ im Display.
Schaltet sich das Gerät wegen einer Fehlfunktion aus, so erscheint ein blinkendes „F“ vor der „OFF“-Anzeige im Display.
den ältesten Fehler. Mit den Aufwärts-/Abwärtstasten können die 10 gespeicherten Fehler angezeigt werden.
Durch einen Druck auf die Bestätigungstaste gelangen Sie wieder auf die Testebene.
3.3.1.6. Anzeige der Gesamtbetriebszeit (tSt6)
Dieser Test zeigt die Gesamtbetriebszeit an, die im Gegensatz zu „Test 1“ nicht zurückgesetzt werden kann.
Anzahl der Einschaltvorgänge angezeigt, die bei Überschreiten der 9999 auf Null zurückgesetzt wird.
Durch einen Tastendruck auf die Bestätigungstaste gelangen Sie auf die Testebene zurück.
3.3.1.7. Test der seriellen Verbindung (tSt7)
Durch diesen Test können Sie die Funktion einer TTL (80C32)-Verbindung der Pilot,
durchgeführt werden. In diesem Falle erscheint OPEN auf der Anzeige.
Durch einen Druck auf die Bestätigungstaste wird der Test beendet.
Stecker wieder ankommt..
Bei Testbeginn kann man “Lt” auf der Anzeige lesen. Ist der Test erfolgreich, so erscheint dann « OK
“Er” stehen. Durch einen Druck auf die Bestätigungstaste beenden Sie den Test.
3.3.1.8. Test der seriellen Verbindung (tSt8)
Durch diesen Test können Sie die Funktion einer seriellen Verbindung über RS 232 (2691) der Pilot kontrollieren,
Anzeige.
Bestätigungstaste wird der Test beendet.
bestanden, wenn" NoRC" auf der Anzeige erscheint. Durch einen Druck auf die Bestätigungstaste beenden Sie den Test.
Bei Testbeginn kann man “Lr” auf der Anzeige lesen. Ist der Test erfolgreich, so erscheint « OK
würde “Er” stehen ”. Durch einen Tastendruck auf die Bestätigungstaste beenden Sie den Test.
3.3.1.9. Anzeige der Kraft auf dem Drucksensor (tSt9)
wird.
Durch einen Druck auf die Bestätigungstaste gelangen Sie auf die Testebene zurück.
3.3.1.10. Anzeige der Software-Version (tStA)
Revision angezeigt, z. B. „d“.
Durch einen Druck auf die Zehnteltaste wird ein check-sum des Eeprom angezeigt.
Ein Tastendruck auf andere Tasten zeigt an, ob es einen Index “ a ” bis “ z ” zu dieser Software Version gibt.
Durch einen Druck auf die Bestätigungstaste gelangen Sie auf die Testebene zurück.
Page 42

3.3.1.11. Anzeige der Analogeingänge (tStb)
Dieser Test ermöglicht das Lesen der umgewandelten Werte der 5 Analogeingänge und der 3 Testeingänge. Die Anzeige
Dieser Test zeigt Ihnen die Schieberkopfposition in mm an. Die Anzeige wird beim Verschieben des Schieberkopfes
Dieser Test ermöglicht es Ihnen, den Signalgeber zu überprüfen. Durch Drücken der Bestätigungstaste wird dieser Test
erfolgt im Hexadezimalcode. Die Werte verändern sich entsprechend der fortlaufenden Aktualisierung.
Mit den Aufwärts-/Abwärtstasten können diese 8 Werte aufgerufen werden.
Die Eingänge sind verteilt wie folgt:
0 Akkuspannung
1 n.b.
2 Drucksensor
3 n.b.
4 Potentiometervorschubkontrolle
L Test 0 , ADC Test (000 – 004) wenn alles korrekt
M ADC Test (1FB – 204) wenn alles korrekt
H ADC Test (03B – 3FF) wenn alles korrekt
Durch eine Druck auf die Bestätigungstaste gelangen Sie auf die Testebene zurück.
3.3.1.12. Anzeige Schieberkopfposition (tStC)
fortlaufend aktualisiert. Die Genauigkeit beträgt ± 1 mm.
Durch einen Druck auf die Bestätigungstaste gelangen Sie auf die Testebene zurück.
3.3.1.13. Test akustischer Signalgeber (tStd)
gestartet und das Modul piept so lange, bis Sie erneut auf die Bestätigungstaste drücken.
Durch einen Druck auf die Bestätigungstaste gelangen Sie auf die Testebene zurück.
3.3.1.14. Anzeige der Kalibrierwerte (tStE)
Dieser Test ermöglicht es Ihnen, die im Eeprom gespeicherten Kalibrierwerte aufzurufen.
Die Anzeige erfolgt im Hexadezimalcode. Der Wert und die dazugehörigen Bezeichnungen leuchten abwechselnd auf:
bat 1 Akkuspannung, Alarm und Voralarm 6,3 V
bat2 Akkuspannung Voralarm 5,9 V
bat3 Akkuspannung Alarm 5,7 V
HIGH Vorschubkontrolle 115 mm ( mit Lehre )
Low Vorschubkontrolle 20 mm
0G Drucksensor 0 kg
5000G Drucksensor 5 kg
Page 43

Mit den + et - Tasten können die Werte aufgerufen werden. Durch Drücken der Zehnteltaste wird die Anzahl der erfolgten
Kalibrierungen angezeigt.
Die Anzeige erfolgt als Füllmenge der entsprechenden Spritze: 20cc (20/25cc), 50cc (50/60cc). Ist eine Spritzengröße im
Eeprom nicht vorhanden, so wird sie auch nicht angezeigt. Wenn der Spritzenniederhalter keine Spritzengröße erkennt,
Durch einen Druck auf die Bestätigungstaste gelangen Sie auf die Testebene zurück.
3.3.1.15. Anzeige der Spritzengrößen (tStF)
Dieser Test zeigt Ihnen die möglichen Spritzengrößen an. Die Anzeige erfolgt als Füllmenge der Spritzen.
erscheinen 4 Striche im Display.
Die Anzeige wird fortlaufend aktualisiert entsprechend den Veränderungen am Spritzenniederhalter.
Durch einen Druck auf die Bestätigungstaste gelangen Sie auf die Testebene zurück.
3.3.1.16. Anzeige der Spritzennummer (tStG)
Dieser Test zeigt Ihnen die Spritzengruppennummer an, die im Eeprom abgelegt ist, z.B: G 0.2 .
Durch einen Druck auf die Bestätigungstaste gelangen Sie auf die Testebene zurück.
Page 44

3.3.1.17. Kontrolle der Spritzengruppenliste (tStH)
Dieser Test ermöglicht Ihnen die Kontrolle der Spritzengruppenliste, die im Eprom gespeichert ist, im Vergleich zur
Das Spritzenvolumen wird auf der 7-Segmentanzeige angezeigt (z. B. 50 cc) und die entsprechende LED auf der
aufgeklebten Spritzengruppenliste. Diese Übereinstimmung können Sie kontrollieren. Mit den Aufwärt/Abwärtstasten können Sie von Volumen zu Volumen springen und dieses mit der Anzeige auf dem Aufkleber
aufgeklebten Spritzengruppenliste.
vergleichen.
Beispiele :
= BD Plastipak
= BD Perfusion
= Braun Omnifix
= Braun Perfusor
= Sherwood Monoject
= Terumo
Page 45

4. Wartung
Das Gerät darf nur vom Hersteller oder durch die benannten Service-Center repariert und gewartet werden. Jeder
Sollte das Gerät bei uns repariert werden, legen Sie uns bitte eine detaillierte Angabe zum Fehler bei. Auf gute Verpackung
Sollte das Gerät eingeschickt werden, muss auf gute Verpackung geachtet werden. Am besten verwenden Sie die
befindet sich im direkten Umfeld des Patienten. Von daher versteht es sich von selbst, dass die äußeren
Geräte nicht autoklavieren oder in Flüssigkeiten eintauchen. Vermeiden Sie das Eindringen von Flüssigkeiten
Befindet sich das Gerät in einem stark kontaminierten Raum, ist es ratsam, es während der Raumdesinfektion
Für weitere Informationen in Bezug auf die Belieferung mit passenden Reinigungs- und Desinfektionsmitteln wenden Sie
Das Gerät muss an einem trockenen Platz gelagert werden. Bei einer längeren Lagerperiode sollte die Batterie durch eine
4.1. Empfehlungen
undefinierte Fehler muss dem technischen Personal oder dem Hersteller gemeldet werden.
sollte geachtet werden. Am besten verwenden Sie die Originalverpackung.
Originalverpackung.
Vial Medical übernimmt keine Haftung für Schäden oder Verlust während des Transports zum Service.
4.2. Reinigung und Desinfektion
Die Pilot C
Geräteoberflächen täglich gereinigt und desinfiziert werden sollten. Dadurch schützen Sie den Patienten und das Personal.
l Vor der Reinigung das Gerät vom Netz trennen.
l
l
l Bitte benutzen Sie nicht:
in das Gerät oder die Gerätestecker.
q Benutzen Sie zur Reinigung ein mit lauwarmem Wasser befeuchtetes Tuch. Alkoholische Reinigungsmittel
nur verdünnt anwenden.
q Keine scheuernden Mittel verwenden.
q Oberflächen nicht abspülen.
dort zu lassen. Danach können Sie es mit einem feuchten Tuch abwischen.
© TRICHLORÄTHYLEN, DICHLORÄTHYLEN.
q AMMONIAK.
q TERRALIN, MINUTIL
q AMMONIUMCHLORID (SALMIAK)
q CLOROFORM und HYDROCARBON.
q ÄTHYLEN DICHLORID - METHYLEN CHLORID
q AZETON.
Aggressive Mittel können die Kunststoffteile beschädigen und zu Fehlfunktionen führen.
q Vorsicht ist auch bei auf Alkohol basierenden Sprays geboten (20% - 40% Alkohol). Sie können Haarrisse
im Kunststoffgehäuse verursachen und ergeben keine ausreichende Desinfektion.
sich bitte an die Fachleute Ihres Hauses.
4.3. Lagerung
befugte Person abgeklemmt werden, um Schäden am Gerät zu verhindern.
Das Gerät sollte in einem geeigneten trockenen Raum gelagert werden.
q Lagerkonditionen:Temperatur 0 – 40 ° C
q Relative Luftfeuchtigkeit maximal 85%, keine Kondensation.
Wir empfehlen, nach einer längeren Lagerzeit eine Vollladung der Batterie durchzuführen.
Page 46

4.4. Kontrolle der LED und der Tastatur
Siehe tst2 und tst3.
4.5. Test Batteriedauer
1. Die Betriebszeit einer vollgeladenen Batterie beträgt im Schnitt 7 Stunden (Minimum 5 Stunden) mit einer 50 ml
Spritze bei einer Förderrate von 5 ml/Std oder > 1 Stunde bei 120ml/Std.
2. Der Batterievoralarm schlägt ca. 60 Minuten vor Batterieende ( bei eine Förderrate von 5 ml/Std) an
q Wichtig: Die Aufladezeit der Batterie für eine Kapazität von 100 % beträgt mindestens 16 Stunden.
4.6. Isolationstest
© Gemäß IEC Norm 601.1 oder VDE 0751
4.7. Fehlerbehebung
Festgestellter Fehler Ursache
• Zu früh erkanntes Infusionsende
(ca. bei 10ml).
• Benutzte Spritze nicht gem. Auswahl.
• Kein Voralarm und
Infusionsende-Alarm.
• Grosse Abweichung der
Fördermenge.
• Druckalarm bei Inbetriebnahme. • Schlechte Kalibrierung des Drucksensors.
• Druckalarm während des
Betriebes.
• Entkopplungsalarm bei
Inbetriebnahme.
• Nicht berechtigter Alarm
Spritzenkolben Position.
• Nicht berechtigter Alarm
Spritzenkörperposition.
• Anzeigefehler. • Ansteuerungstransistor und/oder Verbindung der Karte
• Alarm ohne Error Code. • Spannungsversorgung zu gering (6,9V) siehe MAX 652.
• Benutzte Spritze nicht gem. Auswahl.
• Benutzte Spritze nicht gem. Auswahl.
• Drucksensor defekt.
• Unterbrechung am Flexcord.
• Ausgewählte Druckgrenze zu niedrig.
• Schlechte Kalibrierung des Drucksensors.
• Entkoplungsmikroschalter defekt.
• Spritzenkolbenerkennung defekt.
• Optokoppler defekt und/oder Verbindungen defekt.
überprüfen.
• CPU Karte defekt.
• Im Falle eines Absturzes….. • Kontrollieren Sie das Innenleben.
• Prüfen Sie das Gerät auf Gehäuseschäden.
Page 47

4.8. Fehlermeldungen Er(-)0, Er01, Er(-)2, Er03, CFPc
Fehlermeldungen
ER (-) 0
Selbsttest hat bei Inbetriebnahme nicht
funktioniert
Er10
Er20
Er30
Er40
Er50
Er60
Er70
Er80
Er0 1
Fehler im Bereich der Motorsteuerung
oder aber Motor selbst
Definition
Anomalie Elektronische Steuerung
RAM intern
RAM extern
checksum Eeprom
Anomalie Eeprom
Anomalie ADC
Nichtübereinstimmung der
Spritzenparameter
Anomalie Motorfrequenz
Anomalie Tastatur
Fehler in der Stromversorgung des
Motors
Ursache
Check-Summe: RAM, EPROM, EEPROM
defekt
Beim Wiederbeschreiben des Eeprom,
beim Abschalten des Gerätes wird die
Checksumme ins EEPROM geschrieben
und die letzten Parameter gespeichert:
Es gibt einen Checksummen-Fehler,
wenn die Zeit des »Hard aus kleiner ist
als « Soft Zeit »
Er(-)0 oder CFPc :Sollte das Gerät
« CFPc » anzeigen, so muss das Gerät
neu konfiguriert werden : WATCH DOG
fehlerhaft
Tastaturfehler oder Kurzschluss oder
EMF überschritten
Motordrehzahlerkennung oder zugehörige
IC´s
Er(-) 2*
Die Positionskontrolle des Schlittens hat
einen Positionsfehler gefunden, der
außerhalb der Toleranz liegt : Info. S.A.V.
Er32
Er52
Er72
Er82
Er(-) 4 mögliche Fehler während des
Betriebs
Er14
Er24
Er34
Er44
CFPc
Selbsttest bei Inbetriebnahme nicht
einwandfrei
Anomalie im Bereich Vorschub
Vorschubfehler
Vorschubfehler
Vorschubfehler
Vorschubfehler
Förderratenfehler
Förderratenfehler
Falsche Drehrichtung des Motors
Förderratenfehler
Quartzfehler oder UART - Fehler.
Konfigurationsfehler Inkorrekte Parameter
Potentiometer oder ADC
Oft Stecker, Kalibrierung oder
Potentiometer
Funktionsparameter oder Konfiguration
inkorrekt
Page 48

Technischer Zusatz zur Pilot HYPERBARIC
leistungsbezogene Merkmale etc.) durch Personal, das nicht zu Fa. Fresenius Vial SA gehört, entbindet
Laufende Reparaturen sowie Wartungsarbeiten können von einem Fachbetrieb Ihrer Wahl unter dessen Verantwortung
durchgeführt werden. Es wird jedoch empfohlen, zuvor eine technische Unterweisung durch das Personal von Fa. Frese-
Möglicherweise sind in diesem Handbuch Ungenauigkeiten bzw. Schreibfehler enthalten. In spätere Ausgaben dieses
Dieses Dokument ist ein Zusatz zum Handbuch „Technische Unterlagen der Pilot A2 und C, réf. 0575“. Es beschreibt
die besonderen Eigenschaften der Pilot HYPERBARIC. Für Instandsetzungen sehen Sie in die Unterlagen der Pilot A2
(die Infos für die Netzversorgung sind für Pilot HYPERBARIC nicht relevant).
Diese Unterlagen gelten für Pilot HYPERBARIC ab der Seriennummer: 016117/xxxxxxxx
Für einen normalen Betrieb der Pilot HYPERBARIC sind besondere Maßnahmen erforderlich. Wir bedanken uns für
Ihre Bemühung, sich mit den Besonderheiten des Gerätes zu befassen.
4.8.1. ENTWICKLUNGSÜBERSICHT
q WICHTIG : Sämtliche grundlegenden Änderungen an diesem Gerät (technische sowie
den Hersteller von jeglicher Verantwortung.
nius Vial oder MC Medizintechnik einzuholen.
Handbuchs können daher Änderungen eingebracht werden.
Jegliche Vervielfältigung, auch die Vervielfältigung von Ausschnitten dieses Werkes ist untersagt. Das Kopieren
oder die Vervielfältigung, unabhängig von der Art und Weise der Vervielfältigung (Photographie, Mikrofilm, CD,
Disketten etc.) ist strafbar und wird gesetzlich verfolgt.
Page 49

4.8.2. Einführung
Das Funktionsprinzip der Pilot HYPERBARIC ist das gleiche wie das der Pilot A2.
Der größte Unterschied betrifft die Spannungsversorgung, die 12V beträgt, weil wir die Risiken der Netzversorgung
( 230V ac ) umgehen mussten, da in einer Druckkammer aus Sicherheitsgründen meistens keine Netzversorgung
vorhanden ist.
Zudem verfügt diese Spritzenpumpe nicht mehr über eine interne Spannungsversorgung, um das Risiko der
Bildung von Wasserstoff zu vermeiden.
Anmerkung: Wir empfehlen Ihnen jedoch, eine zusätzliche 12V Spannungsversorgung ( Batterie ) bereit zu
halten, die auch bei Spannungsausfall des Netzes den Betrieb sicherstellen kann.
4.8.3. Installation
Die Verbindung mit einer Spannungsquelle muss unbedingt außerhalb der Druckkammer hergestellt werden
(12 Vdc und eventuell eine 12V Batterie).
zone d'environnement du caisson hyperbare
Pilote HYPERBARIC
RS 232
vue face arrière
connexions extérieures
au caisson hyperbare
12 Vdc
appel infirmière
batterie 6V
Wichtig: Die Spannungsversorgungsleitung darf nicht hängen, wegen Stolpergefahr etc.
Kontrollieren Sie, dass die Spannungsversorgungsleitung gut am Gerät befestigt ist.
Die 12 Vdc Spannungsversorgung muss der Norm IEC 601-1 entsprechen, z.B. eine Spannungsversorgung des
Typs EGSTON 12 V 500 mA.
4.8.4. Steckerbelegung der Spannungsversorgung
Der Spannungsversorgungsstecker muss so gesichert sein, dass ein versehentliches Dekonnektieren während des
Betriebs in der Druckkammer unmöglich ist.
Steckerbelegung : -EXT-BUCHSE
3
2
4
6
1
5
Wichtig : Wenn Sie eine andere Zuleitung verwenden als die mitgelieferte, so muss diese mindestens 1 A
Dauerstrom gewährleisten.
1. Rotes Kabel +12Vdc ext.
2. Grünes Kabel + 6V Batterie ext.
3. Weißes Kabel Gem. Schwesternruf.
4. Blaues Kabel Masse Batterie
5. Schwarzes Kabel Masse ext.Spg. Vers.
6. gelbe Kabel ON Schwesternruf.
4.8.5. Instandhaltungen
Die Pilot HYPERBARIC und ihre Komponenten unterliegen besonderen Anforderungen. Deshalb empfehlen wir
Ihnen, die STK-Zeit zu verkürzen ( 6 Monate ) in Abhängigkeit von der Verwendungshäufigkeit in der
Druckkammer.
Das Gerät sollte bei jeder STK geöffnet werden, damit Sie sich vom einwandfreien Zustand der elektronischen
Bauteile überzeugen können. Besonderes Augenmerk sollten Sie auf die Elektrolytkondensatoren legen die auch
überprüft werden müssen:
1. An der Basis: Keine Spuren.
2. Auf dem Deckel: Dekompressionsventil
Tests haben jedoch erwiesen, dass Sie druckbeständig sind.
Um einen optimalen Betrieb zu gewährleisten, muss die externe Batterie nach 3 Jahren gewechselt werden.
Page 50

Die Pilot HYPERBARIC besitzt eine besondere Tastatur. Sollte Sie ersetzt werden müssen, müssen Sie diese aus
einer besonderen Ersatzteilliste einsetzen ( Liste am Ende des Manuals ).
4.8.6. Kontrolle der 12 V dc / externe Batterie
1. Verbinden Sie das Gerät mit einer 12 Vdc Spannungsversorgung und überzeugen Sie sich, dass die gelbe
Anzeige leuchtet.
2. Unterbrechen Sie die externe Spannungsversorgung und kontrollieren Sie, ob die Spritzenpumpe auf die
externe Batterie geschaltet hat ( grüne LED leuchtet).
3. Verbinden Sie die externe Batterieversorgungsleitung mit einer regelbaren Spannungsquelle, mit
6,3 V/min 1,5A ( Achtung : Polarität !!! ).
4. Nehmen Sie das Gerät durch Drücken der ON-Taste in Betrieb.
5. Legen Sie eine Spritze ein und bestätigen Sie Ihre Auswahl. Wählen Sie eine Förderrate und starten Sie.
6. Wählen Sie nun über die regelbare Spannungsquelle einen Bereich zwischen 5,8 V und 6 V, und überzeugen
Sie sich, dass das Gerät Batterie-Voralarm auslöst und die LED Bat Alarm + Voralarm leuchtet.
7. Wählen Sie nun über die regelbare Spannungsquelle einen Bereich zwischen 5,6 V und 5,8, und überzeugen
Sie sich, dass das Gerät Batteriealarm auslöst und dass die LED Bat Alarm + Alarm leuchtet.
Anmerkung : Sollten diese Werte wider Erwachen nicht eingehalten werden, führen Sie ETA4 erneut durch, ( siehe
Kapitel 3 nach ).
4.8.7. Besondere technische Anweisungen
Die Verwendung von silikonhaltigem Fett ist untersagt, da bei Kontakt mit Sauerstoff Explosionsgefahr besteht.
Sollten Sie dennoch Fett verwenden müssen, so ist unbedingt darauf zu achten, ein garantiert
zugelassenes Fett zu verwenden.
Benutzen Sie als Netzversorgung ausschließlich die Batterie, die mitgeliefert wurde: Batterie 6 Volts 1.1 / 1.3 Ah.
Wenn Ersatzteile erforderlich sind, verwenden Sie nur die für Pilot zugelassenen ( siehe Ersatzteilliste ).
Überzeugen Sie sich bei jeder STK, dass nur Ersatzteile mit der Aufschrift « HYPERBARE » verwendet werden.
Entfernen Sie die Abdeckung der Spannungsversorgung nicht.
4.8.8. Autonomietest der externe Batterie
Die Autonomie der externen Batterie beträgt durchschnittlich 7 Stunden ( mindestens 5 ) mit einer 50 ml Spritze
und einer Förderrate von 5 ml/Std oder > 1 Stunde mit 120 ml/Std.
Der Batterievoralarm warnt den Anwender, dass er nur noch ca. 1 Std Autonomie bei 5 ml/Std hat, bevor das Gerät
abschaltet.
Danach müssen Sie das Gerät mindestens 16 Std laden, um wieder volle Kapazität zu haben.
4.8.9. Schwesternruf
Das monostabile Relais RL2, dessen Kontaktpunkte ( 3 und 6 ) auf dem Stecker abgreifbar sind, garantiert das
Funktionieren der Batteriealarmleuchte:
- Normalbetrieb : Rote LED an.
- Voralarm Zustand / Bat. Alarm : Blinkende rote LED.
4.8.10. Tastatur der Pilot HYPERBARIC
Die Tastatur der Pilot HYPERBARIC ist besonders für den Betrieb in der Druckkammer konzipiert.
Wichtig : Verwenden Sie keine andere Tastatur als die für die Pilot HYPERBARIC vorgesehene . Siehe
Extra Ersatzteilliste.
4.8.11. Fetten des Antriebs
Wichtig : Verwenden Sie nur Fette, die für einen Betrieb mit Sauerstoff unter Druck zugelassen sind.
1. ACHTUNG: Verwenden Sie niemals SILIKONFETT !!
NT0575 Rév.B1
Page 51

NT0575 Rév.B1
Page 52

Übersicht:
109
108
117
116
115
111
121
114
107
113
99
100
101
122
112
104
123
124
125
126
127
128
103
178
102
105
106
118
119
120
110
NT0575 Rév.B1
Page 53

Spritzenschieber Pilot C
Page 54

Spritzenschieber Pilot A2
NT0575 Rév.B1
Page 55

Motor-Getriebe Einheit
275
225 229
261
274
276
225 228 261 274 276
229 275
Pilot A2 (neuer Spritzenschieber) Pilot C (neuer Spritzenschieber)
Page 56

Nützliche Adressen
Beratung, Vertrieb und Service :
MC Medizintechnik GmbH
Am Neuen Berg 8
Postfach 1324
D-63755 Alzenau/Ufr.
Telefon (0 60 23) 9722-0
Telefax (0 60 23) 43 06
Mitglied des AK 752.6.2in DIN und VDE
Da Vorschriften und Geräte von Zeit zu Zeit geändert werden, muß die Gültigkeit dieses Dokuments von uns bestätigt werden.
Diese Anleitung kann Form oder Rechtschreibfehler enthalten. Für Hinweise bedanken wir uns und nehmen sie in spätere Auflagen auf.
COPYRIGHT © 1998, Fresenius Vial S.A.
Sämtliche Rechte an Texten und Bildern vorbehalten. Jeder Nachdruck, auch auszugsweise und jede Wiedergabe der Abbidulgen,
auch in veränderter Form bedarf der schriftlichen Genehmigung.
Fresenius Vial S.A. . - siège social : Le Grand Chemin - 38590 BREZINS (FRANCE)
S.A. à directoire et conseil de surveillance au capital de 90128000 F - SIREN Grenoble B 408 720 282.
 Loading...
Loading...