

Page 1
System description
Electronic monitoring system
EMS 2
Page 2

Page 3

EMS 2
1Foreword
This system description provides an overview of the design and the operation of the electronic monitoring
system (EMS 2).
In addition, the functions which the EMS 2 contains, and the manner in which problems in the engine and in
the EMS 2 can be detected, are explained.
© 0702 Page 55
Page 4

EMS 2
Page 56 © 0702
Page 5
EMS 2
2 Important notes
In the event of critical conditions, the EMS 2 may independently shut the engine off, either
with or without prior warning depending on the configuration, or may merely provide a
warning. The user must be informed of this and must be familiarised with limp-home mode.
! The following states can be recognised with the diagnostic lamp
Display State Indicates
Important notes
Diagnostic lamp
illuminates for 2 s
from ignition on.
Diagnostic lamp
continuously
illuminated.
Diagnostic lamp
flashes rapidly
(approx. 1 Hz).
* Diagnostic lamp
flashes slowly
(approx. 0.5 Hz).
Lamp test System is ready for operation.
Warning
regarding exceeded limit
values and system faults.
Emergency engine
shut-off if shut-off limits
are exceeded or not
achieved.
The limp-home mode
button has been
actuated in order to
bridge the reduction in
power or engine shut-off.
Bridging is stored in the
control unit.
A reduction in power is only possible in combination with
an engine governor, e.g. EMR and MVS.
The reduction in power can be temporarily bridged with
the limp-home mode button. (Depression of the
button is confirmed with slow flashing, see *).
After the engine has been shut-off, fault code enquiry is
possible (see **).
Attention: In a few seconds, the engine will be
automatically shut-off for the purpose of protection.
The reduction in power can be temporarily bridged with
the limp-home mode button. (Depression of the
button is confirmed with slow flashing, see *).
After the engine has been shut-off, fault code enquiry is
possible (see **).
Attention: Following actuation of the limp-home mode
button, the engine continues to run without protection for
a short time, and may become damaged! For this reason,
only actuate the button in the event of an emergency
(e.g. if life is otherwise placed at risk)!
** Fault code
enquiry
! The illumination of the maintenance/service lamp demands that the engine be maintained by the
DEUTZ Service department.
© 0702 Page 57
The diagnostic lamp serves to display a fault
code (a sequence of
short and long flashing
impulses).
In the event of engine standstill, an enquiry regarding the
fault code may be made with the limp-home mode button/
diagnostic button, see Chapter 8.4.
Page 6

Important notes
EMS 2
Page 58 © 0702
Page 7
EMS 2
System description
3 System description
3.1 Use of the EMS 2
The EMS 2 is a monitoring system for the 1013, 1015 engine model series. It can be used on its own and
also in combination with the MVS (solenoid valve system) or the EMR (electronic engine governor).
The EMS 2 provides functions for engine protection, for indicating maintenance requirements and for
diagnostic purposes. With the aid of the data recorder function, an overview of the manner of operation,
capacity utilisation and possible causes of engine failure may be obtained. In addition, data exchange with
other electronic control units (e.g. EMR, MVS) is possible via the CAN interface.
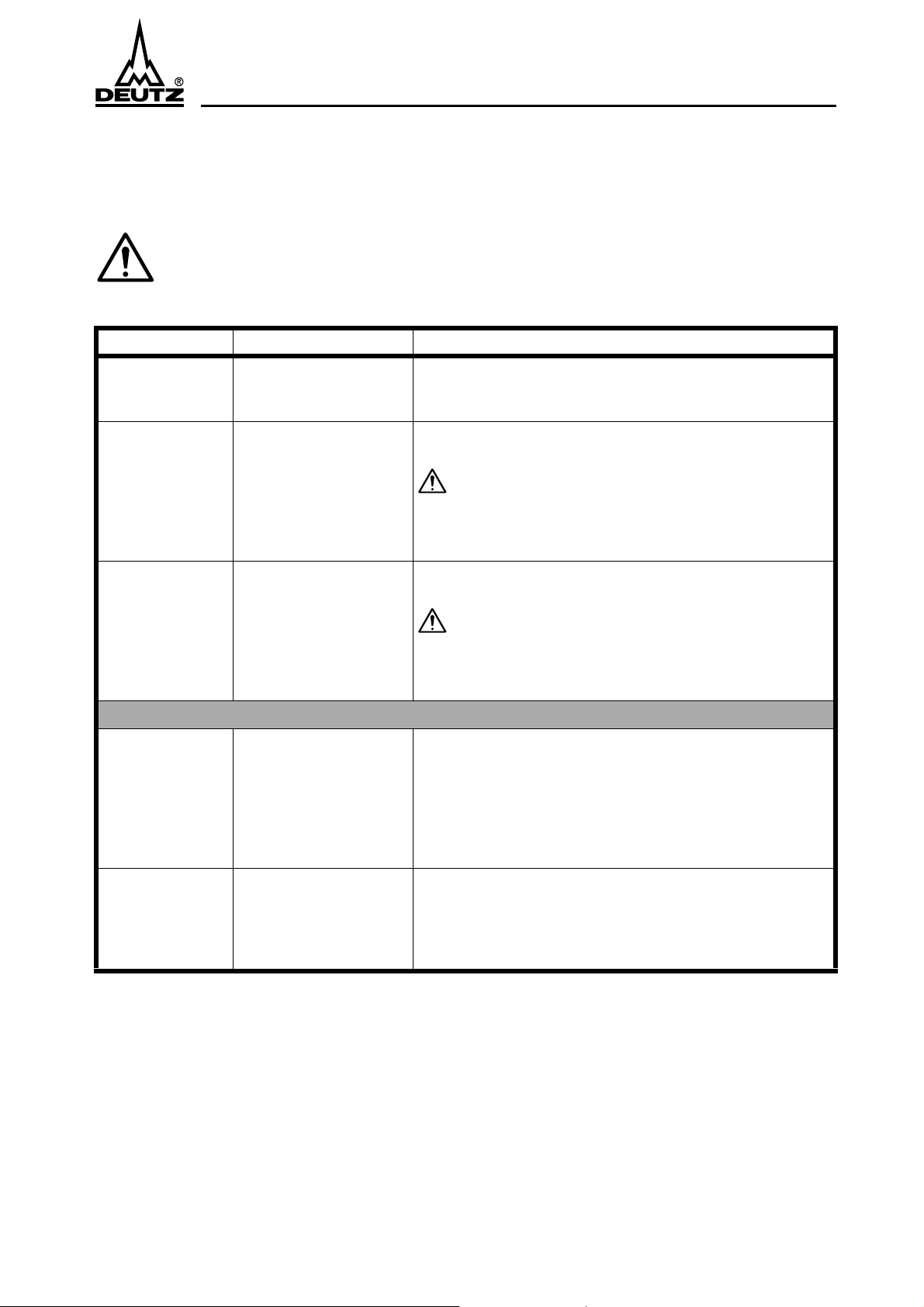
3.2 System overview
3.2.1 EMS 2 alone
Engine-side facility
Flame system
solenoid valve
Coolant
temperature sensor
Oil pressure
sensor
Oil level switch Alternator Starter
Flame system
temperature sensor
Engine speed
Engine shut-off
lifting magnet
EMS
Control unit
Vehicle-side/
System-side facility
Energy supply
Glow-start switch
Multi-functional display
Configurable outputs
(e.g. indicator lamps)
Maintenance/service
Diagnostic lamp
Diagnostic button/
limp-home button
Diagnostic interfaces
• S, L line (ISO 9141)
• CAN bus (SAE J1939)
• SAE J1708 / J1587
Air filter differential
pressure sensor
Coolant level switch
© 0702
© 0702 Page 59
Page 8
System description
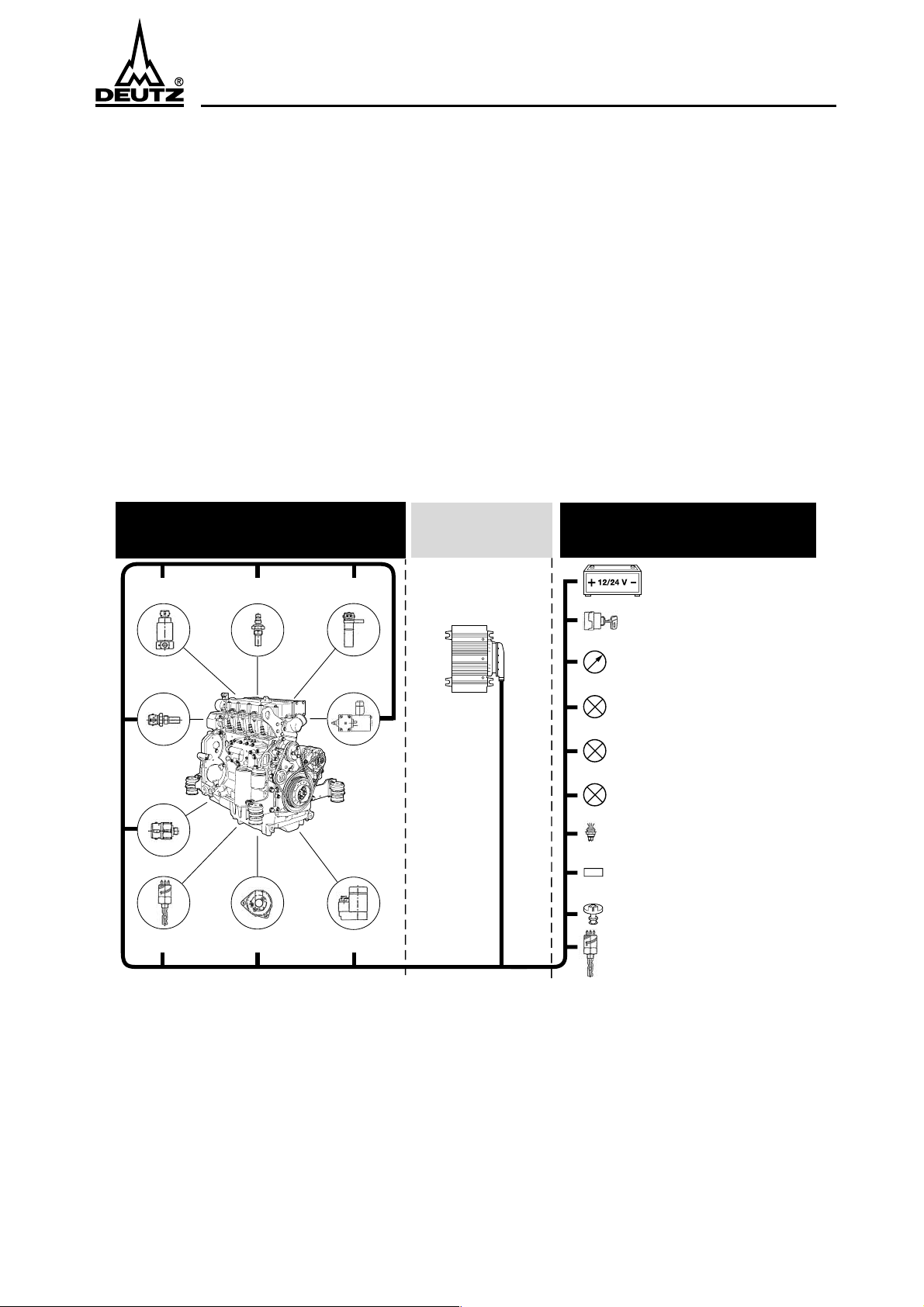
3.2.2 EMS 2 in combination with MVS
EMS 2
DEUTZ scope of delivery
MVS
Engine
© 0702
wiring
harness
Coolant
level sensor
Engine
plug
Vehicle
plug
EMS 2
Central
plug
Vehicle-side installation
Accelerator pedal
Diagnostic lamp (MVS)
Diagnostic button (MVS)
Indicator lamp (EMS)
Maintenance/service (EMS)
Diagnostic lamp (EMS)
Air filter
differential
Interface
SAE J1708/
J1587
X23
CAN
X26
pressure switch
Diagnostic plug
Part No.: 0419 9615
Service
Operating manual
110 / 220 V~
Power supply
or
battery
Interface
Diagnostic button/limp-home button (EMS)
User level
depending on
authorization
Printer
Power supply
or
battery
110 / 220 V~
X25
X22
Software
disc
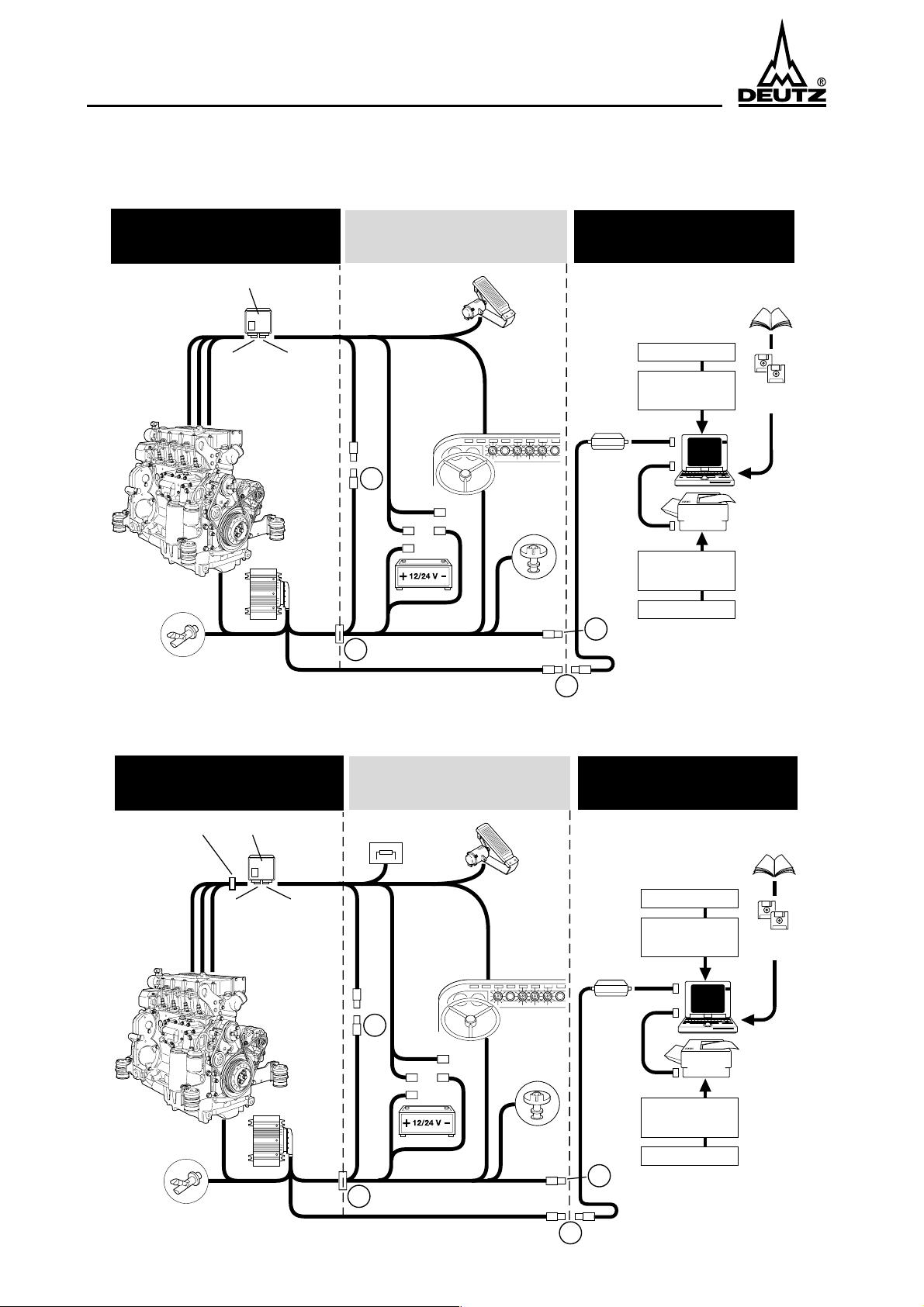
3.2.3 EMS 2 in combination with EMR
DEUTZ scope of delivery
Transfer plug
Engine
wiring
harness
Coolant
level sensor
Engine
plug
EMR
Vehicle
plug
EMS 2
Central
plug
Vehicle-side installation
Terminating
resistor (CAN)
CAN
X26
X23
Accelerator
pedal
Fault lamp (EMR)
Indicator lamp (EMS)
Maintenance/service (EMS)
Diagnostic lamp (EMS)
Air filter
differential
pressure switch
Interface
SAE J1708/
J1587
Diagnostic plug
Part No.: 0419 9615
Service
Operating manual
110 / 220 V~
Power supply
or
battery
Interface
Diagnostic button/limp-home button (EMS)
User level
depending on
authorization
Printer
Power supply
or
battery
110 / 220 V~
X25
Software
disc
© 0702
X22
Page 60 © 0702
Page 9
EMS 2
System functions
4 System functions
1
4.1 Introduction
The EMS 2 serves to electronically monitor the engine. Its functions include:
Engine protection functions
●
Warning the operator if limit values are exceeded or not achieved.
●
Reduction in engine power.
●
Emergency engine shut-off if operating data exceed or do not achieve the shut-off limits.
Indication of maintenance requirements
in order to remind the operator and to reduce the consumption of operating media. The maintenance
intervals can be obtained from the DEUTZ engine operating instructions, Chapter 5.1.
●
in the event of excessive air filter differential pressure.
●
if the number of operating hours leads to the achievement of the next maintenance requirements.
●
if the load population reaches a maintenance limit.
●
if calculation of the engine operating statuses (temperatures, speed, etc.) results in the oil change limit's
being exceeded.
Data exchange
with other systems via the CAN interface, e.g. with the solenoid valve system (MVS):
●
Transmission of the output reduction signal if limit values are exceeded.
●
Engine shut-off via the CAN interface sets, e.g. the fuel injection quantity to zero.
●
The integration of measurement data and fault messages via the CAN interface extends the input signals
of the EMS 2 for executing engine protection functions and system diagnosis (see above).
●
Transfer of the EMS 2 measurement data to other systems.
Diagnosis of the entire system
●
System self-diagnosis, i.e. of the control unit, the sensors and the actuators.
●
Display of engine operating data and self-diagnosis data on a PC (ISO9141 / RS232).
●
Forwarding of the engine operating data to the SAE-J1708/1587 interface for diagnostic and display
systems.
●
Actuation of a telltale and output of a flashing code for fault identification.
Data recorder
Determination of the manner of operation, capacity utilisation and causes of engine failure.
●
Recording the most important measurement variable signals.
●
Determination of the load population.
●
Storage of exceeded maintenance intervals.
●
Documentation of hours of engine operation.
Engine operation display
●
Output of a signal (telltale or relay) as soon as the speed exceeds 400 rpm.
1)
Not all functions are available in all applications.
© 0702 Page 61
Page 10
EMS 2
System functions
4.2 Engine protection functions
4.2.1 General
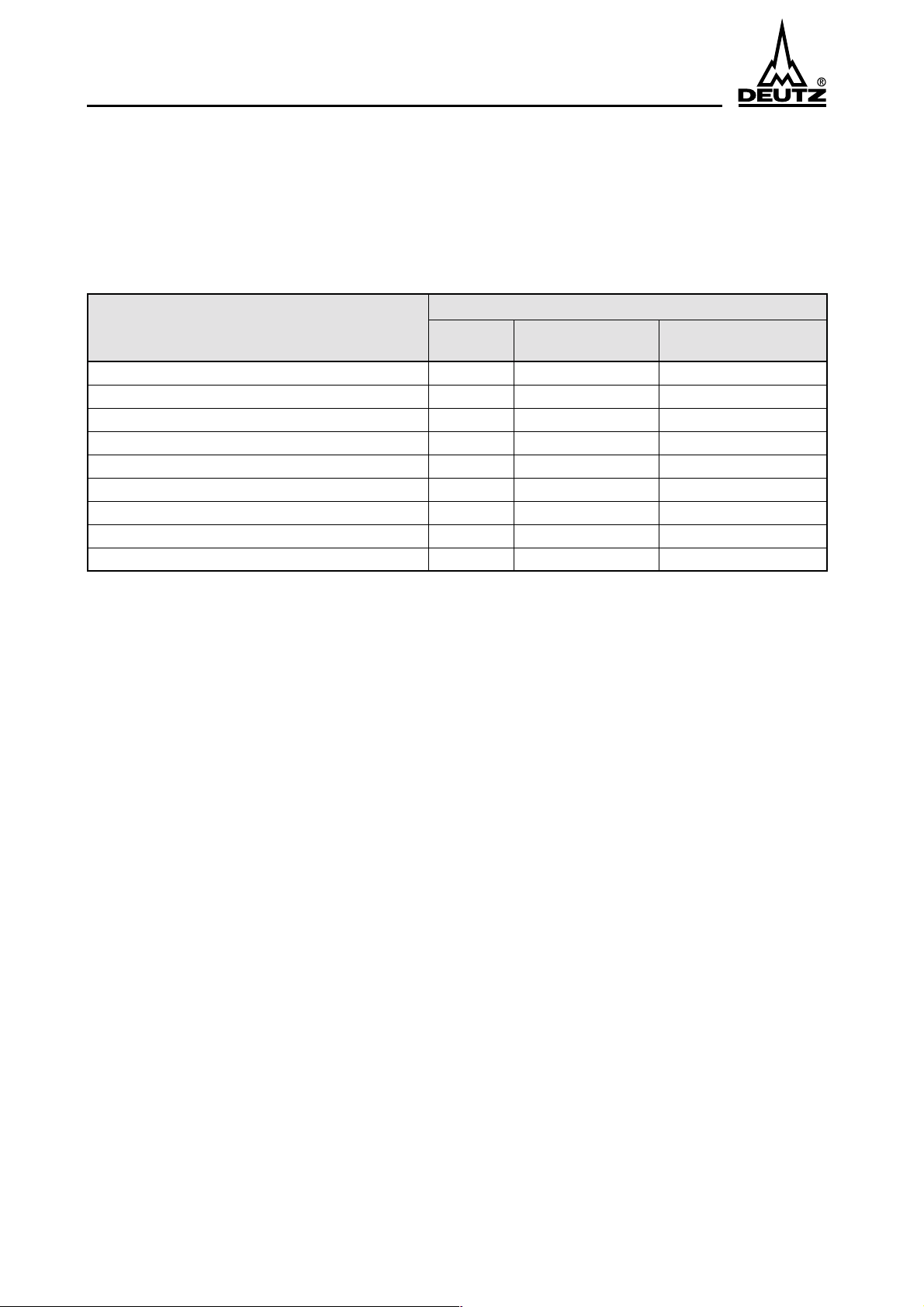
The following table contains an overview of the measurement variables which can be monitored, together
with the relevant, possible engine protection functions.
Monitorable measurement variable
Possible engine protection function
Warning Power reduction Emergency engine
shut-off
Speed x x
Oil temperature x x x
Coolant temperature x x x
Cylinder temperature 1 x x x
Cylinder temperature 2 x x x
Oil pressure x x x
Coolant leveld x x x
Oil level x x x
Reserve signal T1 x x x
1
The configuration is programmed in the factory.
1
●
If the measurement variable lies within the warning range, the diagnostic lamp is continuously illuminated. As a result of a command via the CAN interface to the EMR or MVS, the power is reduced. If the
measurement variable exceeds/does not achieve the recovery threshold, the lamp is extinguished again.
●
A reduction in power is only possible in combination with EMR and MVS.
●
If the measurement lies within the shut-off range, emergency engine shut-off is carried out following
the expiry of a waiting period. The diagnostic lamp flashes rapidly (frequency approx. 1 Hz). Shut-off is
effected either
-via a shut-off solenoid or
-via the CAN interface on other electronic control units (EMR, MVS)
●
Limit values which are exceeded or not achieved are documented in the fault memory.
●
The fault message is output if the diagnostic button is actuated during engine standstill
- as a flashing code via the diagnostic lamp.
- with a notebook connected via the ISO9141 interface with the SERDIA diagnostic programme.
- via the ISO J1708/1587 interface according to standard.
●
Starting prevention can be recognised via the rapid flashing of the diagnostic lamp (1Hz) in the event of
engine standstill. If the EMS 2 has shut the engine off on the basis of the engine monitoring functions,
restarting is prevented. The same applies if monitoring is carried out during standstill, and engine starting is blocked due e.g. a low coolant level.
●
The engine can be restarted by switching the ignition off/on (terminal 15).
●
Outputs may also be used to initialise lamps or relays if limit values are exceeded or not achieved, see
Chapter entitled Outputs 5.2.
Page 62 © 0702
Page 11

EMS 2
System functions
4.2.2 Override-Funktion
●
In safety-critical cases, emergency engine shut-off or output reduction can be suppressed with the
limp-home button/diagnostic button (override signal). The EMS 2 is programmed in such a manner that
the overwriting of these engine protection functions applies only for a specific period of time (limp-home
time) or until the engine is shut-off.
●
Depression of the button is confirmed via slow slashing (frequency approx. 0.5 Hz). The limp-home
time (override time) begins again each time the button is depressed. Excessively frequent actuation of
the button may damage the engine and lead to the expiry of the warranty (responsibility of the user).
●
Override procedures are stored in the control unit.
●
Following the expiry of the override time, the warning, reduction in power or the shut-off function are
reactivated insofar as the relevant conditions for this are still present.
4.2.3 Speed monitoring
Speed monitoring prevents engine damage as a result of excessive speed, and is defined prior to delivery
depending on the combination (e.g. EMS with MVS) and model series. The speed signal can be supplied to
the EMS 2 control unit in three ways:
●
With a pick-up (magnetic speed sensor).
●
Via the W terminal of the alternator.
●
With data exchange via the CAN interface.
4.2.4 Temperature monitoring
Depending on the engine model series, temperature sensors are available for engine oil, coolant, cylinder
head 1 and 2, and reserve temperatures. Connection to the EMS 2 is carried out in two ways:
●
Either via the inputs (see Chapter 5.1).
●
Or via the CAN interface from other systems (MVS, EMR).
In addition, each time the temperature is exceeded, an output for initialising a lamp or a relay may be allocated, see Chapter entitled Outputs 5.2.
If the temperature falls below the recovery threshold, the diagnostic lamp is shut-off, and the power reduction or emergency shut-off engine protection functions are reset.
4.2.5 Engine oil pressure and reserve pressure monitoring
Oil pressure monitoring is activated following the expiry of a fixed period of time after the engine has been
started.
Depending on the application, the connection to the EMS 2 can be carried out in two ways:
●
Via the inputs (see Chapter 5.1).
●
Or via the CAN interface from other systems (MVS, EMR).
In addition, each time the temperature is exceeded, an output for initialising a lamp or a relay may be allocated, see Chapter entitled Outputs 5.2.
The warning limit is speed-dependent. In order to take pressure fluctuations into consideration, the oil pressure may fall below the warning limit for a speed-dependent period of time before the engine protection
functions respond.
Following the expiry of the waiting period, the diagnostic lamp is continuously illuminated, insofar as the
signal still lies in the warning range.
If the oil pressure exceeds the recovery threshold, the diagnostic lamp is shut-off, and the power reduction
or emergency shut-off engine protection functions are reset.
Other pressures may be monitored depending on the application and the input assignment of the control
unit.
© 0702 Page 63
Page 12

EMS 2
System functions
4.2.6 Filling level monitoring
Depending on the engine model series, sensors are available for engine oil, coolant or reserve fluid filling
levels. Connection to the EMS 2 is carried out in two ways:
●
Via the inputs (see Chapter 5.1).
●
Or via the CAN interface from other systems (MVS, EMR).
If the warning threshold is not achieved, the diagnostic lamp is continuously illuminated. If the level rises
above the recovery threshold due to the fluid's being topped up, the diagnostic lamp is shut-off.
Whilst engine is stationary
Fluid levels are monitored whilst the engine is stationary and the ignition is switched on (terminal 15). If the
level falls below the shut-off limit, starting is prevented following a period of time which is specified in the
factory. During this enquiry time, engine starting is released until starting is prevented.
During engine operation
The engine oil level is not monitored during engine operation. For the other fluid levels, monitoring during
engine operation may also be programmed in the factory.
4.3 Indication of maintenance requirements
Maintenance requirements may be indicated in the following manner:
●
Via the maintenance/service lamp.
●
Via the ISO 9141 interface with SERDIA.
After maintenance has been carried out, the maintenance messages can be reset with SERDIA or by connecting the L lead of the ISO9141 interface to ground for a minimum of 5 to a maximum of 10 seconds. The
functions described in the following may report maintenance requirements, whereby each may initialise the
maintenance lamp. An enquiry regarding the functions which are reporting the maintenance requirements
can be made with the flashing code.
4.3.1 With operating time counter
When the operating time counter reaches the next maintenance interval, the maintenance/service lamp is
switched on, and the operator is reminded that maintenance is due.
4.3.2 With load population
This function is only possible if the EMS 2 receives a load signal, e.g. from another electronic control unit via
the CAN interface.
Maintenance is signalised with the aid of the maintenance/service lamp in accordance with the capacity utilisation of the engine throughout the engine operation period.
4.3.3 With air filter differential pressure sensor
Depending on the engine model series, the engine is equipped with air filter differential pressure sensors. If
the air filter differential pressure exceeds the specified limit during engine operation, i.e. at engine speeds in
excess of 400 rpm, the maintenance/service lamp is switched on. The maintenance message is only reset if
the air filter differential pressure returns to normal.
4.3.4 Oil change interval calculation
This procedure is not applied in the case of all engine model series. The oil change interval depends on the
manner in which the engine is operated. Calculation of the time of the next oil change is carried out with
characteristic engine variables such as temperatures, speed, etc. When the calculation reached the oil
change limit, the maintenance/service lamp is initialised.
Page 64 © 0702
Page 13
EMS 2
System functions
4.4 Data recording
4.4.1 Data channels
The EMS 2 contains a maximum of 32 memory domains, in which a maximum of 32 measurement and calculation values (speed, temperatures, pressures, fluid levels, output signals, etc.) can be recorded. Some of
these signals, e.g. charge air pressure and charge air temperature, can also be read in from engine governor
systems via the CAN interface. In the relevant memory domains, identical measurement signals with different sampling rates can be recorded (most rapid sampling rate 5 Hz).
Depending on the spacing of the measurement points, measurement value recording of up to several thousand is possible. Either the current, maximum, minimum or the mean measurement values are recorded.
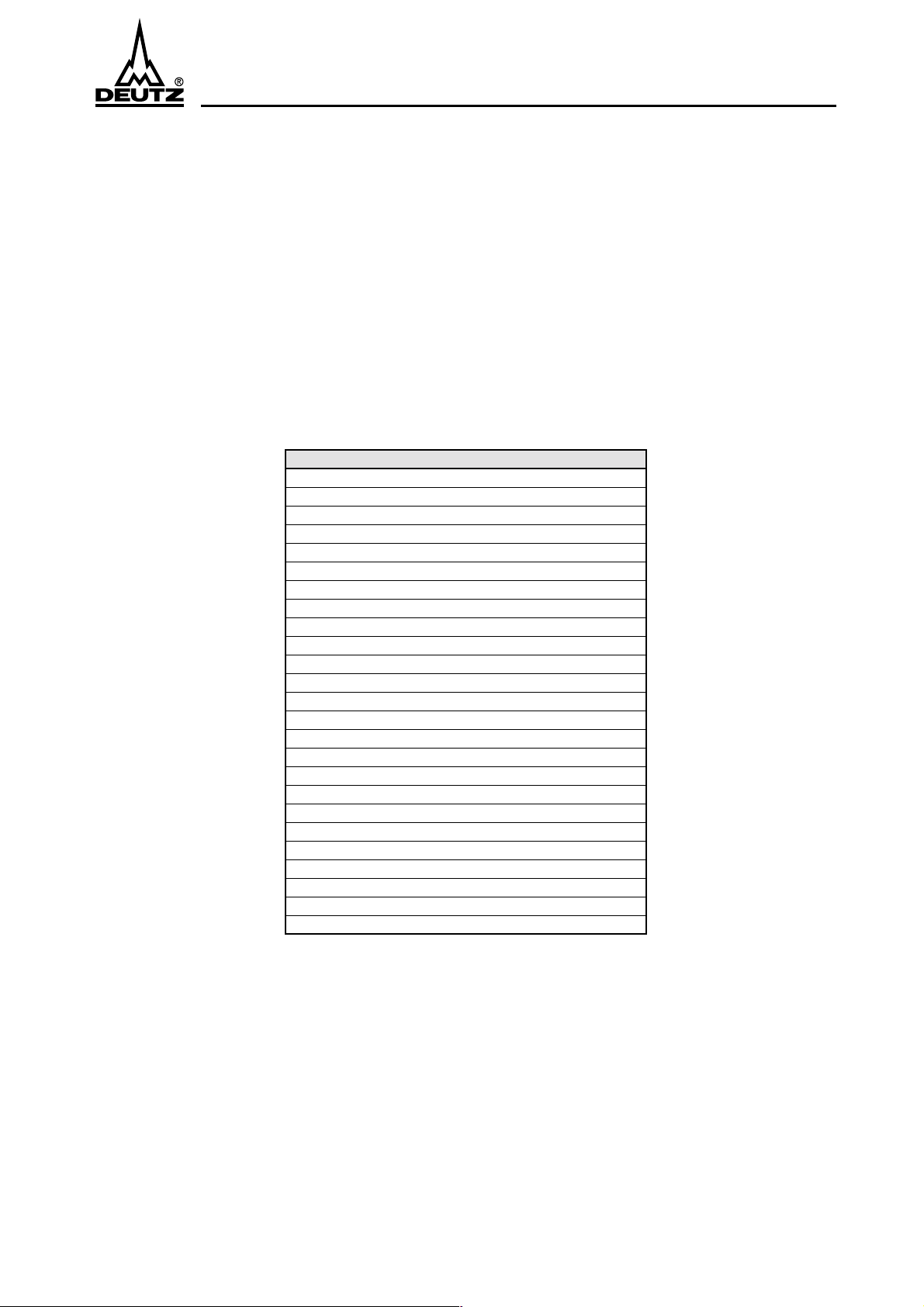
Depending on the engine model series and system expansion, values from the following table may be
recorded:
Possible measurement signals
Charge air pressure
Charge air temperature
Operating time counter
Speed
Oil temperature
Coolant temperature
Cylinder head temperature 1
Cylinder head temperature 2
Reserve temperature 1
Reserve temperature 2
Engine oil pressure
Reserve oil pressure 1
Reserve oil pressure 2
Coolant level
Engine oil leve
Fluid level 1
Fluid level 2
Fluid level 3
Load signal
Fuel injection quantity (via CAN)
Output switching statuses
Power reduction signal
Override signal
Shut-off limit exceeded
Test operation mode
The EMS 2 is programmed with a sensible data recording configuration in the factory. Changes must be
coordinated with head office, and are only possible with SERDIA.
Data recording is only carried out whilst the engine is running.
The data are read out with SERDIA, and are available in a standard format for commercially available gra-
phics and evaluation programmes, e.g. Excel.
© 0702 Page 65
Page 14

EMS 2
System functions
4.4.2 Load population determination
If a load signal is transmitted from an electronic control unit via the CAN interface, the EMS 2 is able to
determine the capacity utilisation of the engine. In order to achieve this, the hours of engine operation are
allocated to the relevant load and speed ranges. Optimally-designed engines may therefore be made
available to the customer for special usages.
Load population:
S1 to S9 are operating time counters for the relevant range.
For maintenance information, the range counters are weighted with factors.
Load %
S7 S8 S9
L
2
S4 S5 S6
L
1
S1 S2 S3
Engine speed n
© 0702
The load population can be displayed and printed out with SERDIA.
4.4.3 Override memory
If limit values are exceeded, the operator can, as in the case of the engine protection functions, see 4.2,
prevent the reduction in power or emergency engine shut-off via a button for a brief period of time or until
the engine is next stationary (depending on the EMS 2 programme).
The interruption of the protective functions is stored in the control unit of the EMS 2, and cannot be deleted.
4.4.4 Maintenance overdue memory
The EMS 2 stores the point in time at which maintenance was required and the reset time, i.e. when maintenance was acknowledged.
These values may also be read with SERDIA.
n
1
n
2
4.5 Engine operation display
The EMS 2 may also be used for the purpose of engine operation display. As soon as the engine speed
exceeds a speed threshold of 400 rpm, a lamp is initialised. This function is not in use in all engine model
series.
Page 66 © 0702
Page 15

EMS 2
Inputs/Outputs
5 Inputs/Outputs
5.1 Inputs
The following table provides an overview of the possible outputs at the EMS 2.
No. Pin GND Designation can be connected measured Especially suitable for
1
1A 1
1B 10, 27 Pick-up
2 25 29 Limp-home and
3 8 PWM input PWM signal switch Pulse-duty fac-
415 13Pressure mea-
5 14 31 NTC input NTC (temperature-
6 32 30 PT100-1 PT100 (temperature7 17 PT100-2
Speed input
diagnosis
surement input
W terminal Frequency For speed measurement only.
Sensor to ground Voltages 0 and 5
V (digital)
tor (digital)
Voltage sensor Voltages 0 to 5 V
(analogue)
Resistors (ana-
dependent resistor)
dependent resistor)
logue)
Resistors (ana-
logue)
For error code enquiry and limphome only.
Integration of a physical variable
from another control unit (e.g. oil
pressure).
Oil pressure measurement
Coolant temperature
Oil temperature
Cylinder head temperature
8 16 Analogue 1 Voltage sensor Voltages 0 to
U
9 34 Analogue 2
10 33 12 Analogue 3 Voltage sensor Voltages 0 to 5 V
1
Speed input available as an option only.
An example of pin assignment (engine 1015, EMS and MVS) is shown in Chapter 11.8.
The EMS 2 control unit can be configured in the factory in such a manner that further input signals can be
read via the CAN bus.
Batt
(analogue)
(analogue)
Suitable for many signals, e.g.
air filter differential pressure,
fluid levels, etc.
Suitable for many signals, e.g.
pressures, temperatures, fluid
levels, etc.
© 0702 Page 67
Page 16

EMS 2
Inputs/Outputs
5.2 Outputs
5.2.1 General
On configuration of outputs 1 to 6 as digital outputs, these function as switches to ground.
+U
Batt
21
15
+U
Batt
3
15
Pull Up
1k
Ω
Digital output PWM output
© 0702
Via configuration, a digital value (e.g. "Speed in the shut-off range") may be allocated as a parameter to
each digital output (with the exception of the diagnostic lamp output).
Parameters can be used to set whether the output is switched on or off on the occurrence of the condition.
If outputs 3 and 4 are configured as PWM outputs (PWM = pulse-width modulation), analogue measure-
ment values, which enter the control unit via CAN or the inputs, and internal EMS 2 variables, can be output.
A measurement value (e.g. "Speed") may be allocated to each PWM output via configuration.
The output frequency of the PWM signal can be parameterised in the range from 85 Hz to 500 Hz, whilst the
pulse-width, i.e. the high or low time, changes in the same manner as the variable which is adjusted via a
characteristic curve.
In the event of a fault, a cable break or a short-circuit can be diagnosed for all outputs.
The following Table provides an overview of the possible outputs at the EMS 2.
Nr. Pin Designation Can e.g. be used for
1 21 Digital 3 Oil pressure telltale
2 22 Digital 4 Shut-off solenoid relay initialisation
3 3 Digital / PWM1 Coolant temperature telltale
4 4 Digital / PWM2 Air filter differential pressure telltale
5 5 Maintenance/service lamp Maintenance/service lamp
6 23 Diagnostic lamp Diagnostic lamp only
Page 68 © 0702
Page 17

EMS 2
Inputs/Outputs
5.2.2 Diagnostic lamp output
This output actuates a diagnostic lamp for displaying fault codes, e.g. continuous illumination, slow flashing
or rapid flashing to ground.
When the ignition is switched on, the lamp illuminates for approx. 2 s for a lamp test.
Continuous illumination indicates a warning, i.e. either a measurement variable is in the warning range or
a system component reports faulty behaviour such as, e.g. sensor cable break or short-circuit (see Fault
messages).
Rapid flashing indicates imminent or current engine protection shut-off.
If the operator interrupts one of the engine protection functions, such as a reduction in power or imminent
engine shut-off, by pressing the limp-home button whilst the engine is running, this is acknowledged with
slow flashing.
If the limp-home button/diagnostic button is actuated whilst the engine is stationary, flashing codes are
output for the fault messages.
© 0702 Page 69
Page 18

Inputs/Outputs
EMS 2
Page 70 © 0702
Page 19

EMS 2
Data interfaces
6 Data interfaces
6.1 ISO interface
The ISO interface is a serial data interface which is standardised according to ISO 9141, and which enables
the exchange of data with the control unit. The ISO interface has the following functions:
●
Diagnosis with SERDIA.
●
Exchange of diagnostic data.
●
Control unit end-of-tape programming (reading and programming of parameters).
●
Execution of engine test functions.
●
Reading of measured and calculated variables.
●
Reading the data recorder out.
6.2 CAN interface
The CAN interface is a rapid serial data bus which is standardised according to SAE J1939, and which enables the exchange of data between several control units (e.g. EMR, MVS, transmission electronics, traction
control). The CAN interface has the following functions:
●
Exchange of diagnostic data (error messages, deletion of error memory).
●
Reading of measured and calculated variables.
●
Suppression of fuel injection.
●
Reduction of output.
6.3 SAE-J1708/1587 interface
●
Output of all data received via the inputs or via the CAN interfaces.
●
Output of the fault memory.
●
Deletion of all fault messages.
Note:
☞
In the event of communication via the ISO9141 interface, the SAE-J1587 interface is shut-off!
© 0702 Page 71
Page 20

Data interfaces
EMS 2
Page 72 © 0702
Page 21

EMS 2
Diagnosis
7 Diagnosis
7.1 Self-diagnosis
Self-diagnosis becomes active when a minimum supply voltage (> 9 V) is exceeded.
In this case, both internal control unit faults are determined and the inputs and outputs and the sensors and
output loads are checked for cable break and short-circuit. The fault must be present for a minimum period
of time before it is stored. Continuous diagnostic lamp illumination indicates that a fault is currently present.
A maximum of 15 faults are stored simultaneously. The individual faults which this involves can be seen
from the fault message Table.
The fault messages are displayed as flashing codes as described in Section 7.2, and via the interfaces to
PCs and diagnostic units as described in Chapter 8.2.
7.2 Diagnosis with flashing codes
The diagnostic lamp informs the operator of the presence of a fault or exceeded limit values, as described
in the case of the engine protection functions in Chapter 4.2, with continuous illumination.
When the engine is stationary, each depression of the diagnostic/override button leads to the output of a
flashing code which indicates which fault or signal has exceeded the limit value.
Each time the button is pressed, the next fault is displayed. Following the last fault, the first fault message is
output again.
The flashing code is comprised of long and short flashing pulses which the operator counts.
The appropriate fault can be seen in the fault message Table (Chapter 8.4).
7.3 Diagnosis with SERDIA software
Together with the interface and notebook (or PC), SERDIA (Service Diagnosis software) forms a combined
special service tool. With the aid of the SERDIA diagnostic software, information regarding the following
can be displayed:
- Fault memory
- Configuration (authorisation is determined via the interface level)
- Measurement values
- Maintenance data
- Load population.
Fault messages for passive or eradicated faults can be deleted with SERDIA.
SERDIA (Service Diagnosis) is a software programme which the operator can use, via the PC, to monitor
measurement values and detect faulty operating behaviour whilst the diesel engine is running.
In order to achieve this, the PC is connected to the diagnostic interface via an interface. Communication
with the control unit is carried out via a special EMS 2 protocol.
With regard to handling SERDIA, see separate manual. The acquisition of SERDIA is explained via a DEUTZ
service memorandum.
© 0702 Page 73
Page 22

Diagnosis
EMS 2
Page 74 © 0702
Page 23

EMS 2
Fault messages
8 Fault messages
8.1 Integration of the fault messages via CAN
The EMS 2 is able to communicate with other electronic engine regulation systems via the CAN interface.
Such an application includes the MVS (solenoid valve system). This transmits the fault messages to the
EMS 2, and the diagnostic lamp is continuously illuminated. The messages can then be output via only one
lamp as a flashing code. The nature of the flashing code indicates the system in which a fault is present (see
code Table, Chapter 8.4). The operator is only required to heed one lamp, wiring expenditure is reduced.
The faults and measurement values from other control units (e.g. MVS), which are read by EMS 2 via the
CAN bus, are also output via the ISO9141 interface to a notebook with the SERDIA diagnostic programme.
8.2 Output of messages on a notebook or diagnostic systems
The EMS 2 stores the fault messages and transits these as a fault code via the ISO9141 interface. The
codes are listed in the fault message Table (Chapter 8.4).
The fault messages can be read with the SERDIA diagnostic software and a notebook. In addition, measurement values which existed at the point in time at which the fault occurred are displayed on the screen for
each fault.
Instead of using the ISO9141 interface for fault messages, the user may also use the SAE-J1708/1587
interface of the EMS 2 for outputting the faults on diagnostic systems.
8.3 Deletion of fault messages
Insofar as the faults no longer occur, the fault messages are automatically deleted after the ignition key has
been actuated a number of times. If the fault messages are to be deleted directly following a repair operation, the ignition is actuated a corresponding number of times in succession, whereby waiting must be carried out each time during the lamp test time (approx. 3 seconds).
The fault messages can also be deleted with the SERDIA diagnostic programme and a notebook via the
ISO9141 interface or also with also diagnostic systems according to the SAE-J1708/1587 standard.
© 0702 Page 75
Page 24

EMS 2
Fault messages
8.4 Fault messages and fault codes
The following table contains an overview of the possible fault messages and codes.
Notes in the event of diagnosis with telltale:
Depending on the flashing code, the telltale provides a sequence of short and long flashing impulses.
Example: Flashing code S1 L1 S2: one short flash, one long, two short
Note in the event of diagnosis with SERDIA:
The programme displays the location of the fault, the type of fault and the frequency of the fault on the
screen.
Example:
●
Location of the fault: Oil pressure input
●
Type of fault: Cable break or short-circuit to U
Batt
Location of the fault Type of fault Flashing code
S-short
L-long
Zero fault information S1 dispen-
SAE
J1587
FMI
PID/SID
SAE-J1587
xxx
sed
with
Speed pick-up input Cable break S1 L1 S1 5 xxx
Oil pressure input Short-circuit to GND
Cable break or short-circuit to U
NTC input Short-circuit to GND
Cable break or short-circuit to U
PT100-1 input Short-circuit to GND
Cable break or short-circuit to U
PT100-2 input Short-circuit to GND
Cable break or short-circuit to U
Analogue input 1 Short-circuit to GND
Cable break or short-circuit to U
Analogue input 2 Short-circuit to GND
Cable break or short-circuit to U
S1 L1 S2 4
Batt
S1 L1 S3 4
Batt
S1 L1 S4 4
Batt
S1 L1 S5 4
Batt
S1 L1 S6 4
Batt
S1 L1 S7 4
Batt
xxx
3
xxx
3
xxx
3
xxx
3
xxx
3
xxx
3
1
Analogue input 3 Short-circuit to GND
Cable break or short-circuit to U
S1 L1 S8 4
Batt
3
xxx
CAN connection S1 L2 S1 12 SID 231
Override/diagnostic button fault S1 L2 S2 - Digital output 3 Cable break or short-circuit to GND
Short-circuit to U
Batt
S1 L2 S3 4
SID 26
3
Digital output 4 Cable break or short-circuit to GND
Short-circuit to U
Batt
S1 L2 S4 4
SID 40
3
Digital / PWM output 1 Cable break or short-circuit to GND
Short-circuit to U
Batt
S1 L2 S5 4
SID 57
3
Page 76 © 0702
Page 25

EMS 2
Fault messages
Location of the fault Ty pe of f au lt Flashing code
S-short
L-long
Digital / PWM output 2 Cable break or short-circuit to GND
Short-circuit to U
Maintenance lamp output Cable break or short-circuit to GND
Short-circuit to U
Diagnostic lamp output Cable break or short-circuit to GND
Short-circuit to U
Speed exceeded in warning range
in shut-off range
reduction in power
Engine oil temperature exceeded in warning range
in shut-off range
reduction in power
Coolant temperature exceeded in warning range
in shut-off range
reduction in power
Cylinder head temperature 1 in warning range
in shut-off range
reduction in power
Cylinder head temperature 2 in warning range
in shut-off range
reduction in power
Reserve temperature 1 in warning range
in shut-off range
reduction in power
Reserve temperature 2 in warning range
in shut-off range
reduction in power
Engine oil pressure in warning range
in shut-off range
reduction in power
Reserve pressure 1 in warning range
in shut-off range
reduction in power
Reserve pressure 2 in warning range
in shut-off range
reduction in power
Coolant level in warning range
in shut-off range
reduction in power
Engine oil level in warning range
in shut-off range
reduction in power
Fluid level 1 in warning range
in shut-off range
reduction in power
Fluid level 2 in warning range
in shut-off range
reduction in power
Fluid level 3 in warning range
in shut-off range
reduction in power
© 0702 Page 77
Batt
Batt
Batt
S1 L2 S6 4
S1 L2 S7 4
no flashing
code
S1 L3 S1 0 PID 190
S1 L3 S2 0 PID 175
S1 L3 S3 0 PID 110
S1 L3 S4 0 Parameter
S1 L3 S5 0 Parameter
S1 L3 S6 0 Parameter
S1 L3 S7 0 Parameter
S1 L3 S8 1 PID 100
S1 L4 S1 1 Parameter
S1 L4 S2 1 Parameter
S1 L4 S3 1 PID 111
S1 L4 S4 1 PID 98
S1 L4 S5 1 Parameter
S1 L4 S6 1 Parameter
S1 L4 S7 1 Parameter
SAE
J1587
FMI
3
3
4
3
PID/SID
SAE-J1587
SID 58
SID 51
SID 238
Page 26

Fault messages
EMS 2
Location of the fault Type of fault Flashing code
S-short
L-long
Engine protection shut-off
executed
Start prevention executed S1 L5 S2 - Reduction in power override
executed
Engine shut-off override
executed
Control unit EEPROM
memory fault
Control unit RAM or
RAM buffering defective
Bosch control unit CAN fault
codes
Maintenance interval reached
(operating hours)
Maintenance interval reached
(Load population)
Oil change limit reached S1 L6 S3 dispen-
S1 L5 S1 - -
S1 L5 S3 - -
S1 L5 S4 - -
S1 L5 S5 12 SID 253
S1 L5 S6 - -
Bosch
flashing code
S1 L6 S1 dispen-
S1 L6 S2 dispen-
SAE
J1587
FMI
--
sed
with
sed
with
sed
with
PID/SID
SAE-J1587
-
-
-
Maintenance signal 1 exceeds
limit value
Maintenance signal 2 exceeds
limit value
Air filter differential pressure
exceeded
1
xxx = PID of the signal read via this input.
S1 L6 S4 dispen-
sed
with
S1 L6 S5 dispen-
sed
with
S1L6S6 dispen-
sed
with
-
-
-
Page 78 © 0702
Page 27

EMS 2
Repair
9 Repair
All components can only be replaced (repair is not possible) and are available individually. As the control
unit has to be programmed with an engine-specific data record, the following specifications are necessary:
●
Engine number.
●
Complete part number.
Please contact your DEUTZ service partner.
Attention:
In order to avoid damaging the control units, the plug connections on the control unit must be disconnected
prior to electric welding operations!
© 0702 Page 79
Page 28

Repair
EMS 2
Page 80 © 0702
Page 29

EMS 2
Installation
10 Installation
●
Depending on the design of the configuration, the wiring to be carried out by the customer can be seen
in the engine-specific wiring diagram, which is delivered together with the engine.
●
With regard to the mechanical installation of the control unit, reference is made to the installation guidelines regarding the installation of electronic systems in DEUTZ diesel engines, order No. 0399 1990/1.
Further information can be obtained from
DEUTZ AG
Installation Consultancy Department
Tel.: (0221) 822 3140
Fax.: (0221) 822 3198
Sensors and actuators must not, either for checking or test purposes, be individually connected to or between external voltage sources, but only in combination with the EMS 2, as the risk of destruction otherwise
exists!
Despite polarity reversal protection in the control units, polarity reversal must be avoided. Polarity reversal
may lead to damage to the control units!
The control unit plug connections are only dust and water-tight when the counter-plugs are connected!
Until the counter-plugs are connected, the control units must be protected against spray water and electrical discharge at the contacts due to touching!
Attention:
Sensors and actuators must not, either for checking or test purposes, be individually connected to or between external voltage sources, but only in combination with the EMS 2, as the risk of destruction otherwise
exists!
Despite polarity reversal protection in the control units, polarity reversal must be avoided. Polarity reversal
may lead to damage to the control units!
The control unit plug connections are only dust and water-tight when the counter-plugs are connected!
Until the counter-plugs are connected, the control units must be protected against spray water and electrical discharge at the contacts due to touching!
© 0702 Page 81
Page 30

Installation
EMS 2
Page 82 © 0702
Page 31

EMS 2
11 Technical data
11.1 Inputs/Outputs
The following tables contain an overview of the technical data of the EMS 2.
11.1.1 Input table
No. Pin GND Designation Range
1A 1 Speed input 0/U
1B 10, 27
2 25 29 Limp-home and diagnosis Button only (0/U
38 PWM input 0 to U
4 15 13 Pressure measurement input 0 to 5 V (analog)
5 14 31 NTC input 0° C to 130° C
6 32 30 PT100-1 0° C to 300° C
7 17 PT100-2 0° C to 300° C
816 Analogue 1 0 to U
934 Analogue 2 0 to U
10 33 12 Analogue 3 0 to 5 V (analogue)
Batt
Batt
Batt
Batt
Technical data
Batt
(digital)
(analogue)
(analogue)
)
11.1.2 Outputs table
1
No. Pin Designation max. current load
1 21 Digital 3 3 A
2 22 Digital 4 3 A
33 Digital / PWM1 0.5 A
44 Digital / PWM2 0.5 A
55 Maintenance/Service
0.5 A
lamp
6 23 Diagnostic lamp 0.5 A
11.2 Electrical specifications
Nominal voltages: 12 V and 24 V,
each unit functions with both nominal voltages
Operating voltage range: U
Polarity reversal protection: The unit is protected against battery voltage polarity reversal.
Overvoltage protection: The unit is equipped with load-dump protection against 65 V for
Short-circuit strength: All of the unit's connections are short-circuit-proof in the case of
Off-ground nature: The housing is off-ground.
Stray power emission: Via air convection.
Terminal 30 load: < 10 mA with terminal 15 shut-off
1)
Open collector
© 0702 Page 83
from 9 V to 32 V
Batt
300 ms.
conducting connections with +U
against each other.
Batt
, -U
and the connections
Batt
Page 32

EMS 2
Technical data
11.3 EMV/ESD protection
according to guidelines: EU 95/54 EG
EN 61000-4-4
EN 61000-4-2
ISO 7637-2
ISO 7637-3
ISO 11452-2 100 kHz - 1 GHz 100 V/m
57 MHz - 61 MHz 50 V/m Class B, else Class A
ISO TR 10605
11.4 Climatic conditions
Operating temperature: -40 °C to 80 °C
Storage temperature: -55 °C to 80 °C not temporally restricted
Temperature change: IEC 68-2-14
Humidity:
relative humidity: up to 95%
maximum temperature: +55 °C
Salt spray resistance: The system is resistant to salt spray in accordance with
IEC 68-2-52.
Salt content (NaCl): max. (5±1) % percentage per mass
Low air pressure: The unit is resistant to vacuum.
Transportation and storage: max. 150 mbar ±1%
Operation: max. 533 mbar ±5%
Industrial climate: according to DIN 50018, 6 cycles
11.5 Contamination
The unit is resistant to being coated with the following media:
●
Engine oils and additives.
●
Transmission fluids.
●
Lubricating oils.
●
Paints.
●
Hydraulic fluids.
●
Coolants.
●
Greases.
●
Fuels.
●
Cold cleaners.
Page 84 © 0702
Page 33

EMS 2
Technical data
11.6 Mechanical conditions
Free fall: The unit must survive a free fall from a height of 1 m onto concrete or
steel in each of the three main axes without damage. Falling onto the
plug side is not taken into consideration
Vibration:
For any of the main axes, the following maximum values apply:
Amplitude: 0,35 mm
Frequency: 10 Hz to 60 Hz.
Acceleration amplitude: 50 m/s
Frequency: 60 Hz to 500 Hz.
Shock resistance: According to IEC-68-2-27
Peak acceleration: 294 m/s
11.7 Protection class
2
2
, semi-sinoidal form in each main axis
Protection class: IP66K according to DIN 40050.
© 0702 Page 85
Page 34

EMS 2
Technical data
11.8 Pin assignment
Pin Designation Application example in engine, e.g. 1015
1 W terminal (input 1A) Free
19 Ground for outputs to the insulated ground node (GND)
2 Ground for outputs to the insulated ground node
20 Ground for outputs Oil level switch ground (if available)
3 PWM1 (output 3) 0,5 A Coolant temperature lamp
21 Digital 3 (output 1) 3 A Oil pressure lamp
4 PWM2 (output 4) 0,5 A Air filter differential pressure lamp
22 Digital 4 (output 2) 3 A Engine shutt-off lifting magnet
5 Maintenance lamp (output 5) 0,5 A Maintenance lamp
23 Diagnostic lamp (output 6) 0,5 A Diagnostic lamp
6 5V sensor supply Oil pressure sensor supply voltage
24 SAE-J1939 CAN high SAE-J1939 CAN high
7 SAE-J1939 CAN low SAE-J1939 CAN low
25 Diagnostic request sampling element
(input 2)
8 PWM input (input 3) U
26 ISO 9141 S lead ISO 9141 S lead
9 ISO 9141 L lead ISO 9141 L lead
27 Inductive speed sensor - (input 1B) Pickup - input
10 Inductive speed sensor + (input 1B) Pickup + input
28 SAE J1708 + SAE J1708 +
11 SAE J1708 - SAE J1708 -
29 Measurement ground Diagnosis and limp-home button ground
12 Measurement ground Charge air pressure sensor ground (if available)
30 Measurement ground Charge air temperature sensor ground (if available)
13 Measurement ground Oil pressure ground
31 Measurement ground Coolant temperature ground
14 NTC input (input 5) Coolant temperature input
32 PT100-1 (input 6) Charge air temperature input
15 Oil pressure (input 4) 5 V Oil pressure sensor input
33 Analogue 3 (input 10) 5 V/switch Charge air pressure (if available)
16 Analogue 1 (input 8) U
34 Analogue 2 (input 9) U
17 PT100-2 (input 7) switch Oil level switch input (if available)
35 Terminal 30, battery positive Terminal 30
18 Terminal 15, ignition lock Terminal 15
Free
Batt
/switch Coolant level input (if available)
Batt
/switch Air filter differential pressure switch input
Batt
Diagnostic and limp-home button
Coolant level ground and air filter differential pressure switch ground to ground node.
© 0702
Page 86 © 0702
Page 35

12 Appendix
12.1 Drawings (examples)
●
Connection diagram, EMS 2 alone (example)
●
Communication lead EMS with EMR (example)
●
Communication lead EMS with MVS (example)
EMS 2
Appendix
© 0702 Page 87
Page 36

Appendix
EMS 2
Page 88 © 0702
Page 37

EMS 2
12.2 Connection diagram, EMS 2 alone (example)
Note: Only the engine-specific wiring plan is valid!
Appendix
© 0702
© 0702 Page 89
Page 38

Appendix
EMS 2
Page 90 © 0702
Page 39

EMS 2
12.3 Communication lead EMS with EMR (example)
Note: Only the engine-specific wiring plan is valid!
Appendix
© 0702
© 0702 Page 91
Page 40

Appendix
EMS 2
Page 92 © 0702
Page 41

EMS 2
12.4 Communication lead EMS with MVS (example)
Note: Only the engine-specific wiring plan is valid!
Appendix
© 0702
© 0702 Page 93
Page 42

Appendix
EMS 2
Page 94 © 0702
 Loading...
Loading...