

Page 1
iQpump Drive
User Manual
Document Number: TM.iQp.01
Page 2

◆ Quick Reference for iQpump (P7U) <0033>
Parameter
Number
Factory
Setting
User
Setting
Parameter
Number
Factory
Setting
User
Setting
Parameter
Number
Factory
Setting
User
Setting
Parameter
Number
Factory
Setting
User
Setting
Parameter
Number
A1-00 0 C6-05 0 H4-04 8 n3-03 1.0 P2-12 15 RPM
A1-01 2 d1-01 00145 H4-05 50.0% n3-04 40 s P2-13 5.0 s
A1-03 0 d1-02 00145 H4-06 0.0% o1-01 6 P2-14 5.0 s
A1-04 0 d1-03 00145 H4-07 0 o1-02 1**
A1-05 0 d1-04 00145 H4-08 0 o1-05 3
b1-01 0 d1-17 0.00 to 6.00 Hz H5-01 1F o1-06 1**
b1-02 1 d2-01 100.0% H5-02 3 o1-07 2**
P2-15
P2-16
0.0 (system
units P1-02)
1.5 (system
units P1-02)
b1-03 0 d2-02 0.0% H5-03 0 o1-08 91** P2-17 2.0 s
b1-08 0 d2-03 0.0% H5-04 3 o2-01 1** P2-18 2.0 s
b1-11 0 s d3-01 0.0 Hz H5-05 1 o2-02 1 P2-19 0
b2-01 0.5 Hz d3-02 0.0 Hz H5-06 5 ms o2-03 0 P2-20 0.0 Hz
b2-02 50% d3-03 0.0 Hz H5-07 1 o2-04 kVA Dep. P3-01 0
b2-03 0.00 s d3-04 1.0 Hz H5-09 2.0 s o2-05 0 P3-02 59.0 Hz
b2-04 0.50 s
b2-09 0% L1-02 8.0 min o2-07 0 H
E1-01
240.0 V
486.0 V
L1-01 1 o2-06 1
P3-03
0.0 (system
units P1-02)
b3-01 2 E1-03 F L1-03 3 o2-08 1 P3-04 59.0 Hz
b3-02 120% E1-04 60.0 Hz L1-04 1 o2-10 0 H
b3-03 2.0 s
b3-05 0.2 s L2-01 2 o2-14 0 P3-06 5 s
E1-05
240.0 V
486.0 V
L1-05 0.20 s o2-12 0
b3-14 1 E1-06 60.0 Hz L2-02 kVA Dep o3-01 0
b4-01 0.0 s E1-07 3.0 Hz L2-03 kVA Dep o3-02 0
b4-02 0.0 s
b5-01 1 L2-05 Voltage Class Dep. P1-02 1
E1-08
17.2 Vac
33.6 Vac
L2-04 kVA Dep P1-01 0
P3-05
P3-07
P3-08
0.0 (system
units P1-02)
0.0 (system
units P1-02)
0.0 (system
units P1-02)
b5-02 2.00 E1-09 1.5 Hz L3-01 1 P1-03 00145 P3-09 35.0 Hz
b5-03 5.0 s E1-10 10.3 Vac L3-02 120%
b5-04 100.0% E1-11 0.0 Hz L3-04 1 P3-11 2 s
P1-04
0.0 (system
units P1-02)
b5-06 100.0% E1-12 0.0 Vac L3-05 1 P1-05 0 s
b5-07 0.0% E1-13 0.0 Vac L3-06 120% P1-06 35.0 Hz
b5-08 0.00 s E2-01 kVA Dep L4-01 0.0 Hz
b5-09 0 E2-03 kVA Dep L4-02 2.0 Hz
P1-07
0.0 (system
units P1-02)
b5-10 1.0 E2-04 2 L4-05 0 P1-08 5 s
b5-12 0 E2-05 kVA Dep L4-06 80%
b5-13 0% F6-01 1 L5-01 0
P1-09
155.0 (system
units P1-02)
P3-10 35.0 Hz
P3-12
0.0 (system
units P1-02)
P3-13 0.0 Hz
P3-14
P4-01
0.0 (system
units P1-02)
0.0 (system
units P1-02)
b5-14 1.0 s F6-02 0 L5-02 0 P1-10 2 s P4-02 0.0 Hz
b5-17 0.0 s F6-03 1 L5-03 180.0 s
b8-01 0 F6-05 0 L6-01 0 P4-04 2.0 s
P1-11
0.0 (system
units P1-02)
P4-03 0.0 min
b8-04 kVA Dep. H1-01 24 L6-02 15% P1-12 60 s P4-05 0.0 Hz
b8-05 2 0 ms H1-02 14 L6-03 10.0 s
b8-06 0%
C1-01 25.0 s L8-02 95º C P1-14 0.0 A P4-08 0
H1-03
3: 2 - Wire
0: 3 - Wire
L8-01 0 P4-07 0
P1-13
0.0 (system
units P1-02)
P4-06 1.0 s
C1-02 25.0 s H1-04 80 L8-03 4 P1-15 0 P4-09 0.2 min
C1-03 10.0 s H1-05 84 L8-05 1 P2-01 0 P4-10 0
C1-04 10.0 s H2-01 40 L8-06 5.0% P2-02 0.0 P5-01 1
C1-05 50.0 s H2-02 41 L8-07 1 P2-03 10 s P5-02 0.0 Hz
C1-06 50.0 s H3-02 100.0% L8-09 1
C1-09 10.0 s H3-03 0.0% L8-10 0 P5-04 1
P2-04
0.0 (system
units P1-02)
P5-03 1
C1-11 0.0 Hz H3-08 2 L8-11 300 s P2-05 10 s T1-02 kVA Dep.
C2-01 0.20 s H3-09 B* L8-12 45º C P2-06 0 T1-04 kVA Dep.
C2-02 0.20 s H3-10 100.0% L8-15 1 P2-07 300 s
C4-01 1.00 H3-11 0.0% L8-18 1 P2-08 0
C4-02 200 ms H3-12 0.30 s L8-19 20.0%
C6-01 2 H3-13 0 n1-01 1
C6-02 kVA Dep H4-01 2 n1-02 1.00
C6-03 kVA Dep H4-02 100.0% n3-01 5%
P2-09
P2-10
0.0 (system
units P1-02)
0.0 (system
units P1-02)
C6-04 kVA Dep H4-03 0.0% n3-02 150% P2-11 0 RPM
* Factory setting changes to “B” when b5-01=1.
** Factory setting changes to “B” when b5-01=1 as follows: o1-06=1, o1-07=38, o1=08=24
Factory
Setting
User
Setting
2 YAS K AWA TM.iQp.01 iQpump Drive User Manual
Page 3
Table of Contents
Warnings and Cautions ............................................................. 7
Introduction ................................................................................ 9
Physical Installation................................................................. 11
iQpump Model Number and Enclosure Style ................................................ 12
Confirmations Upon Delivery ........................................................................ 13
Component Names ....................................................................................... 15
Exterior and Mounting Dimensions ............................................................... 17
Heat Loss Data ............................................................................................. 21
Checking and Controlling the Installation Site............................................... 22
Installation Orientation and Clearances ........................................................ 23
Removing and Attaching the Terminal Cover................................................ 24
Removing/Attaching the Digital Operator and Front Cover........................... 25
Electrical Installation ............................................................... 29
Terminal Block Configuration ........................................................................ 30
Wiring Main Circuit Terminals........................................................................ 31
Control Wiring ............................................................................................... 40
Digital Operator ........................................................................ 51
Digital Operator Display ................................................................................ 52
Digital Operator Keys.................................................................................... 53
Drive Mode Indicators ................................................................................... 54
Drive Main Menu........................................................................................... 55
Pump Quick Setup Menu (-QUICK-) <0032>................................................ 60
Programming Menu (-ADV-).......................................................................... 61
Example of Changing a Parameter............................................................... 63
YASKAWA TM.iQp.01 iQpump Drive User Manual 3
Page 4

Start Up ..................................................................................... 65
Start Up ......................................................................................................... 66
iQpump Drive Start Up Procedures............................................................... 69
Pump System Start/Stop ............................................................................... 73
Pump Basics ................................................................................................. 75
Use Feedback Level to Start iQpump Controller........................................... 77
Low Feedback Level Alarm and Fault Setup ................................................ 79
High Feedback Level Alarm and Fault Setup................................................ 81
Feedback Loss Detection.............................................................................. 83
Basic Pump Protection.................................................................................. 84
Basic Programming ................................................................. 87
iQpump Basic Programming Parameters...................................................... 88
Pump Basic................................................................................................. 127
Pump Protection.......................................................................................... 130
T1 Auto-Tuning ........................................................................................... 134
Diagnostics & Troubleshooting ............................................ 135
Fault Detection............................................................................................ 136
iQpump Keypad Messages......................................................................... 141
Alarm Detection........................................................................................... 143
Operator Programming Errors (OPE).......................................................... 146
Auto-Tuning Faults...................................................................................... 147
Digital Operator COPY Function Faults ...................................................... 148
Troubleshooting .......................................................................................... 149
Main Circuit Test Procedure ........................................................................ 153
Drive Date Stamp Information ..................................................................... 157
Maintenance............................................................................ 159
Periodic Inspection...................................................................................... 160
Preventive Maintenance.............................................................................. 161
Heatsink Cooling Fan Replacement............................................................ 162
Removing and Mounting the Terminal Card................................................ 164
Parameters.............................................................................. 165
Parameter List............................................................................................. 166
Monitor List.................................................................................................. 190
Fault Trace List ........................................................................................... 193
Fault History List ......................................................................................... 194
4 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 5

Capacity Related Parameters................................................ 197
Drive Capacity............................................................................................. 198
Parameters Affected by o2-04 .................................................................... 199
Capacity Related Parameter Values ........................................................... 200
Specifications ......................................................................... 203
Standard iQpump Drive Specifications........................................................ 204
Communication ...................................................................... 207
Using Modbus Communication ................................................................... 208
Modbus Function Code Details................................................................... 212
Modbus Data Tables ................................................................................... 214
Modbus Self-Diagnosis ............................................................................... 219
Peripheral Devices ................................................................. 221
Branch Circuit Short Circuit Protection........................................................ 222
Branch Circuit Overload Protection............................................................. 224
Peripheral Devices...................................................................................... 224
Third Party Serial Communication Converters
RS232-RS485 / USB - RS485 Converters.................................................. 225
PumpScada Software ................................................................................. 227
Energy Savings Estimation Software.......................................................... 227
EMC Compatibility.................................................................. 229
EMC Compatibility....................................................................................... 230
Electromagnetic Compatibility (EMC) ........................................................ 231
YASKAWA TM.iQp.01 iQpump Drive User Manual 5
Page 6

6 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 7

Warnings and Cautions
This Section provides warnings and cautions pertinent to this product, that if not heeded, may
result in personal injury, fatality, or equipment damage. Yaskawa is not responsible for
consequences of ignoring these instructions.
WARNING
YASKAWA manufactures component parts that can be used in a wide variety of industrial applications. The selection
and application of YASKAWA products remain the responsibility of the equipment designer or end user. YASKAWA
accepts no responsibility for the way its products are incorporated into the final system design. Under no circumstances
should any YASKAWA product be incorporated into any product or design as the exclusive or sole safety control.
Without exception, all controls should be designed to detect faults dynamically and fail safely under all circumstances.
All products designed to incorporate a component part manufactured by YASKAWA must be supplied to the end user
with appropriate warnings and instructions as to that part’s safe use and operation. Any warnings provided by
YASKAWA must be promptly provided to the end user. YASKAWA offers an express warranty only as to the quality of
its products in conforming to standards and specifications published in the YASKAWA manual. NO OTHER
WARRANTY, EXPRESS OR IMPLIED, IS OFFERED. YASKAWA assumes no liability for any personal injury,
property damage, losses, or claims arising from misapplication of its products.
YASKAWA TM.iQp.01 iQpump Drive User Manual 7
Page 8

WARNING
• Read and understand this manual before installing, operating, or servicing this Drive. All warnings, cautions, and
instructions must be followed. All activity must be performed by qualified personnel. The iQpump drive must be
installed according to this manual and local codes.
• Do not connect or disconnect wiring while the power is on. Do not remove covers or touch circuit boards while the
power is on. Do not remove or insert the digital operator while power is on.
• Before servicing, disconnect all power to the equipment. The internal capacitor remains charged even after the power
supply is turned off. Status indicator LEDs and Digital Operator display will be extinguished when the DC bus
voltage is below 50 Vdc. To prevent electric shock, wait at least five minutes after all indicators are OFF and measure
DC bus voltage level to confirm safe level.
• Do not perform a withstand voltage test on any part of the unit. This equipment uses sensitive devices and may be
damaged by high voltage.
• The iQpump drive is not suitable for circuits capable of delivering more than 100,000 RMS symmetrical amperes.
Install adequate branch short circuit protection per applicable codes. Refer to the specification. Failure to do so may
result in equipment damage and/or personal injury.
• Do not connect unapproved LC or RC interference suppression filters, capacitors, or overvoltage protection devices
to the output of the Drive. These devices may generate peak currents that exceed iQpump drive specifications.
• To avoid unnecessary fault displays caused by contactors or output switches placed between iQpump drive and
motor, auxiliary contacts must be properly integrated into the control logic circuit.
• YASKAWA is not responsible for any modification of the product made by the user; doing so will void the warranty.
This product must not be modified.
• Verify that the rated voltage of the iQpump drive matches the voltage of the incoming power supply before applying
power.
• To meet CE directives, proper line filters and proper installation are required.
• Some drawings in this manual may be shown with protective covers or shields removed, to describe details. These
must be replaced before operation.
• Observe electrostatic discharge procedures when handling circuit cards to prevent ESD damage.
• The equipment may start unexpectedly upon application of power. Clear all personnel from the drive, motor, and
machine area before applying power. Secure covers, couplings, shaft keys, and machine loads before energizing the
Drive.
• Please do not connect or operate any equipment with visible damage or missing parts. The operating company is
responsible for any injuries or equipment damage resulting from failure to heed the warnings in this manual.
◆ Intended Use
Drives are intended for installation in electrical systems or machinery.
For use in the European Union, the installation in machinery and systems must conform to the following product standards of
the Low Voltage Directive:
• EN 50178, 1997-10, Equipping of Power Systems with Electronic Devices
• EN 60201-1, 1997-12 Machine Safety and Equipping with Electrical Devices
• Part 1: General Requirements (IEC 60204-1:1997)
• EN 61010, 1997-11 Safety Requirements for Information Technology Equipment
• (IEC 950:1991 + A1:1992 + A2:1993 + A3:1995 + A4:1996, modified)
◆ Other
The iQpump (P7U) Drive is suitable for use on a circuit capable of delivering not more than 100,000 RMS symmetrical
amperes, 240 Vac maximum (240 V Class) and 480 Vac maximum (480 V Class).
8 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 9

Introduction
This Section describes the applicability of the Manual.
The iQpump (P7U) is a Pulse Width Modulated Drive for 3-Phase AC induction motors. This type of Drive is also
known as an Adjustable Frequency Drive, Variable Frequency Drive, AC Drive, AFD, ASD, VFD, and Inverter.
The iQpump (P7U) is a variable torque AC drive, designed specifically for Simplex and Multiplex pumping
applications. The pump applications include Booster Systems, Submersible Deep Well, Fluid Storage Tanks,
Metering Pumps, Commercial and Residential Irrigation Systems.
The iQpump (P7U) sets a new benchmark for size, cost, performance, ease-of-use benefits, comprehensive pump and
motor protection features, and quality. The iQpump (P7U) includes numerous built-in features such as H/O/A
Operation, Selectable Pump Control Engineering Units, PI Control, Pump Basic Control, Pump Protection, MultiPump Control (Lead/Lag), and Pump Messaging Terminology.
The LCD keypad/operator is equipped with Hand/Off/Auto functions, copy feature, and 5 lines of display with 16
characters per line.
Built-in PI and pump specific functions and parameters allow the operator to setup specific control values for a wide
range of applications. The iQpump (P7U) will optimize the pump performance by automatically adjusting the pump
controller based on operating conditions of the pump; such as, process variable changes and pump protection
requirements. The P Group programming parameters are dedicated for pumping applications and provide for ease of
setup.
The iQpump (P7U) drive offers energy savings by controlling the flow rate and the number of operating pumps on the
system. The iQpump (P7U) can be configured using the most popular system control configurations including
Simplex, Duplex, and Triplex pumps systems. The iQpump (P7U) is the master controller with the ability to add
additional pumps on-line by controlling the digital I/O to each individual motor starter.
The iQpump (P7U) has an optional feature to replace the motors starters with additional drives for a more precise
pump control system.
This manual is applicable to the iQpump (P7U) Drives defined by models CIMR-P7U-107. This manual is subject
to change as product improvements occur. The latest version of the manual can be obtained from the Yaskawa. The
date shown on the rear cover is changed when revisions are made.
This manual may describe trademarked equipment, which is the property of other companies. These trademarks are
the property of the registered owner companies and may include the following:
• Modbus
Other Documents and Manuals are available to support special use or installation of this product. These documents
may be provided with the product or upon request. Contact Yaskawa Electric America, Inc. as required. Documents
may include the following:
• TM.iQp.02 Programming Manual
• TM.iQp.11 Modbus Manual
• PumpScada Software and Manual included on CD ROM with product
• Option Instructions included on CD ROM with product
YASKAWA TM.iQp.01 iQpump Drive User Manual 9
®
, trademark of Schneider Automation, Inc.
Page 10
Conventions Used in this Manual
Software Versions
Yaskawa recognizes the need to continuously improve product quality. This drive may receive feature enhancements in the form
of software or hardware changes. New functions may be added to the drive. When a new feature or function is added, the
software version <####> will be placed next to the feature or function.
EXAMPLE: This example shows that settings 2,3,4,5,6 are added to parameter A1-00 for drive
software version <3020>
A1-00 Language Selection Select Language
Select the language displayed on the digital operator according to the following table:
QQQQ
Setting Description
0 English (factory default)
1 Japanese
2 Deutsche <3020>
3 Francais <3020>
4 Italiano <3020>
5 Espanol <3020>
6 Portugues <3020>
In the example above, the version note <3020> indicates that five additional languages have been added with drive software
version 3020. Check the drive nameplate to determine the drive software version.
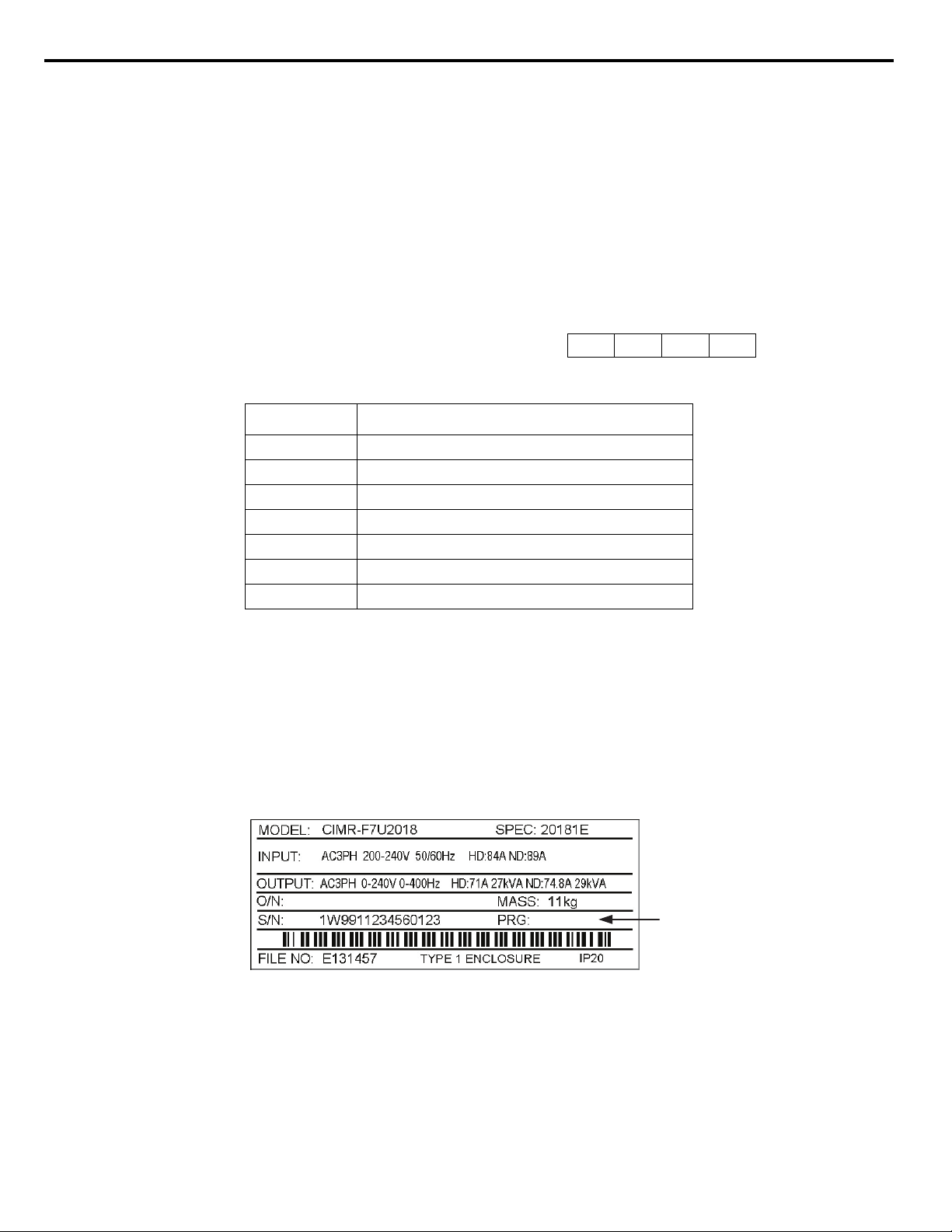
EXAMPLE:Namplate with PRG software number:
The “PRG:” number on the drive nameplate reflects the software version. The software version normally increases to a higher
number with newer versions. Please consult the factory for details.
Figure 0.1
3020
Drive Software
version
Nameplate
10 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 11

Physical Installation
This chapter describes the requirements for receiving and installing the iQpump drive.
1.1 iQpump Model Number and Enclosure Style . . . . . . . . . . . . . . . . 12
1.2 Confirmations Upon Delivery . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.3 Component Names . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.4 Exterior and Mounting Dimensions . . . . . . . . . . . . . . . . . . . . . . . . 17
1.5 Heat Loss Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.6 Checking and Controlling the Installation Site . . . . . . . . . . . . . . . 22
1.7 Installation Orientation and Clearances . . . . . . . . . . . . . . . . . . . . 23
1.8 Removing and Attaching the Terminal Cover . . . . . . . . . . . . . . . . 24
1.9 Removing/Attaching the Digital Operator and Front Cover. . . . . 25
1
YASKAWA TM.iQp.01 iQpump Drive User Manual 11
Page 12

1.1 iQpump Model Number and Enclosure Style
1.1 iQpump Model Number and Enclosure Style
Table 1.1 iQpump Model Numbers and Enclosure Style
Input
Vol tag e
3-Phase
208-240 VAC
208-230 VAC
480 VAC
iQpump
Model-Number
Enclosure Style
CIMR-P7U❑-107
20P4 NEMA Type 1 (IP20) 3.6 0.5/0.75
20P7 NEMA Type 1 (IP20) 4.6 1
21P5 NEMA Type 1 (IP20) 7.8 1.5/2
22P2 NEMA Type 1 (IP20) 10.8 3
23P7 NEMA Type 1 (IP20) 16.8 5
25P5 NEMA Type 1 (IP20) 23.0 7.5
27P5 NEMA Type 1 (IP20) 31.0 7.5/10
2011 NEMA Type 1 (IP20) 46.2 15
2015 NEMA Type 1 (IP20) 59.4 20
2018 NEMA Type 1 (IP20) 74.8 25
2022 NEMA Type 1 (IP20) 88.0 30
2030 NEMA Type 1 (IP20) 115.0 40
2037 Open Chassis (IP00) 162.0 50/60
2045 Open Chassis (IP00) 192.0 60/75
2055 Open Chassis (IP00) 215.0 75
2075 Open Chassis (IP00) 312.0 100/125
2090 Open Chassis (IP00) 360.0 125/150
2110 Open Chassis (IP00) 415.0 150
40P4 NEMA Type 1 (IP20) 1.8 0.5/0.75
40P7 NEMA Type 1 (IP20) 2.1 1
41P5 NEMA Type 1 (IP20) 3.7 1.5/2
42P2 NEMA Type 1 (IP20) 5.3 3
43P7 NEMA Type 1 (IP20) 7.6 5
45P5 NEMA Type 1 (IP20) 12.5 7.5
47P5 NEMA Type 1 (IP20) 17.0 10
49P0 NEMA Type 1 (IP20) 21.0 15
4011 NEMA Type 1 (IP20) 27.0 20
4015 NEMA Type 1 (IP20) 34.0 25
4018 NEMA Type 1 (IP20) 40.0 30
4024 NEMA Type 1 (IP20) 52.0 40
4030 NEMA Type 1 (IP20) 67.2 50
4037 NEMA Type 1 (IP20) 77.0 60
4045 NEMA Type 1 (IP20) 96.0 75
4055 NEMA Type 1 (IP20) 125.0 100
4075 Open Chassis (IP00) 156.0 125
4090 Open Chassis (IP00) 180.0 150
4110 Open Chassis (IP00) 240.0 200
4160 Open Chassis (IP00) 304.0 250
4185 Open Chassis (IP00) 414.0 300/350
4220 Open Chassis (IP00) 515.0 400/450
4300 Open Chassis (IP00) 675.0 500+
Rated
Output
Current
Nominal
Hp
12 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 13

1.2 Confirmations Upon Delivery
r
r
N
P7
1.2 Confirmations Upon Delivery
◆ Receiving Checks
Check the following items as soon as the iQpump drive is received.
Table 1.2 Receiving Checks
Item Method
Has the correct model of iQpump drive been delivered?
Is the iQpump drive damaged in any way?
Are any screws or other components loose? Use a screwdriver or other tool to check for tightness.
If there are any irregularities in the above items, contact the shipping company, the distributor or representative who sold the iQpump
drive, or a Yaskawa office immediately.
The iQpump drive is thoroughly tested at the factory. Any damages or shortages evident when the equipment is received must be reported
immediately to the commercial carrier that transported the material. Shipping damage is not covered by the Yaskawa warranty. After
unpacking and inspecting for damage, verify that internal wire connections have not come loose during shipment by spot checking wire
terminations with a screwdriver or the appropriate tool.
iQpump drive storage must be in a clean and dry location. Maintain the factory packaging and provide covering as needed to
protect the iQpump from construction site dirt, water, debris and traffic prior to and during construction.
Check the model number on the nameplate on the right side of the iQpump drive.
Reconcile with packing slip and/or order information.
Inspect the entire exterior of the iQpump drive to see if there are any dents, scratches or other damage
resulting from shipping.
◆ Nameplate Information
A nameplate is attached to the right side of each iQpump drive. The following nameplate is an example for a standard iQpump drive.
■
ormal
■ P7 iQpump
Drive Model Number
Input Power Rating
Output Power Rating
Serial Number
UL File Number
Drive Model Number
Input Power Rating
Output Power Rating
Serial Number
UL File Number
MODEL:
INPUT: AC3PH 200-240V 50/60Hz 53A
OUTPUT:
O/N:
S/N:
FILE: E131457 TYPE 1 ENCLOSURE IP20
YEA ITEM#: CIMR-P7U20111A-107
MODEL:
INPUT: AC3PH 200-240V 50/60Hz 53A
OUTPUT:
O/N:
S/N:
FILE: E131457 TYPE 1 ENCLOSURE IP20
CIMR-P7U2011
AC3PH 0-240V 0-120Hz 46.2A 18kVA
1W06Z7123450001 PRG:1021
CIMR-P7U2011
AC3PH 0-240V 0-120Hz 46.2A 18kVA
1W06Z7123450001 PRG:0032
SPEC: 20111A
MASS: 7.0kg
SPEC: 20111A-U890107
MASS: 7.0kg
Drive Spec Numbe
Weight
Drive Spec Numbe
Weight
Note: The iQpump Drive Model Number and iQpump Drive Spec Number are required to completely identify an iQpump Drive.
Figure 1.1 iQpump (P7U) Drive Nameplate
YASKAWA TM.iQp.01 iQpump Drive User Manual 13
Page 14
1.2 Confirmations Upon Delivery
TERMS
TERMS
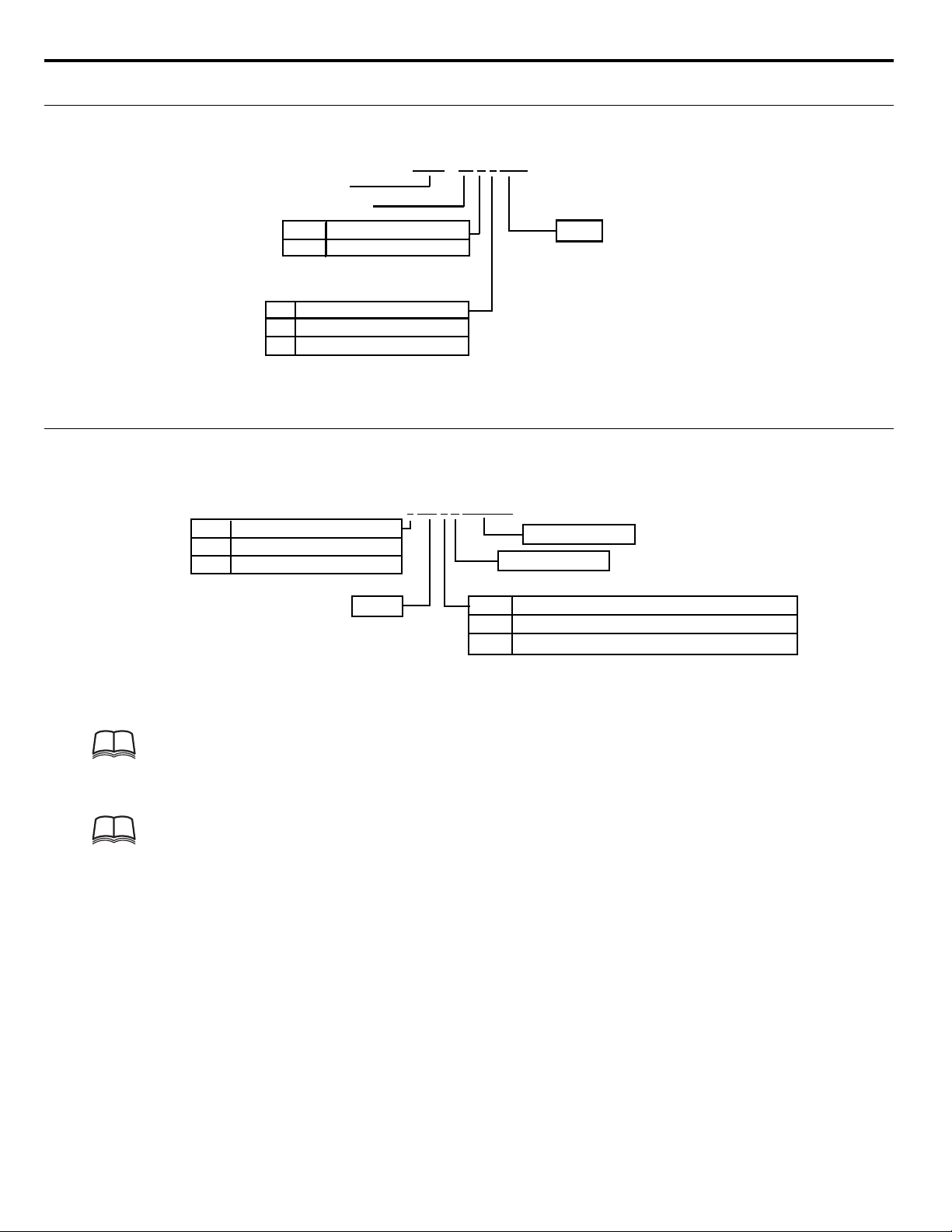
◆ Drive Model Numbers
The model number on the nameplate indicates the design specification, voltage, and rating of the iQpump drive in alphanumeric codes.
CIMR – P7 U 2 0 11*
AC Drive
iQpump Family
No.
U
Spec
UL Specification
Rating
No.
2
4
Voltage
3-phase, 208-240 VAC
3-phase, 480 VAC
* YEA Item #: CIMR-P7U20111A-107
Figure 1.2 iQpump Drive Model Number Structure
◆ Drive Enclosure and Revision Code
The iQpump drive SPEC number on the nameplate indicates the voltage, iQpump drive rating, enclosure type, and the revision code of
the iQpump drive in alphanumeric codes.
2
011 1 A U890107
TERMS
TERMS
No.
2
4
Open Chassis Type (IEC IP00)
Protected so that parts of the human body cannot reach electrically charged parts from the front when
the iQpump drive is mounted in a control panel, also called (protected chassis).
Voltage
3-phase, 208 - 240 VAC
3-phase, 480 VAC
Rating
Figure 1.3 SPEC Number Structure
VAU Number
Hardware Revision
No.
0 Open chassis (IEC IP00)
1
Enclosure Type
NEMA Type 1 (IEC IP20)
TERMS
TERMS
NEMA Type 1 (IEC IP20)
The iQpump drive is shielded from the exterior, and can thus be mounted to the interior wall of a
building (not necessarily enclosed in a control panel). The protective structure conforms to the
standards of NEMA Type 1 in the USA. All protective covers (Fig 1.4) must be installed to conform
with IEC IP20 and NEMA Type 1 requirements
14 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 15

1.3 Component Names
1.3 Component Names
◆ Models CIMR-P7U20P4 through 2018 (25HP @ 208V/240V) and 40P4 through 4018
(30HP @ 480V)
The external appearance, component names, and terminal arrangement of the iQpump drive are shown in Figure 1.4 and Figure 1.5.
Top protective cover
Front cover
Digital Operator
Terminal cover
Figure 1.4 iQpump Drive Appearance
Mounting hole
Diecast Heat Sink
Nameplate
Bottom protective cover
Figure 1.5 Terminal Arrangement (Terminal Cover Removed)
YASKAWA TM.iQp.01 iQpump Drive User Manual 15
Page 16

1.3 Component Names
◆ Models CIMR-P7U2022 through 2110 (30HP and above @ 208V/240V) and 4030
through 4300 (40HP and above @ 480V)
The external appearance, component names, and terminal arrangement of the iQpump drive are shown in Figure 1.6 and Figure 1.7.
Mounting holes
Mounting holes
Drive cover
Drive cover
Cooling fan
Front cover
Front cover
Digital Operator
Digital Operator
Terminal cover
Terminal cover
Figure 1.6 iQpump Drive Appearance
Cooling fan
Nameplate
Nameplate
Control circuit
terminals
Main circuit
terminals
Ground terminal
Figure 1.7 Terminal Arrangement (Terminal Cover Removed)
Charge indicator
Ground terminal
16 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 17
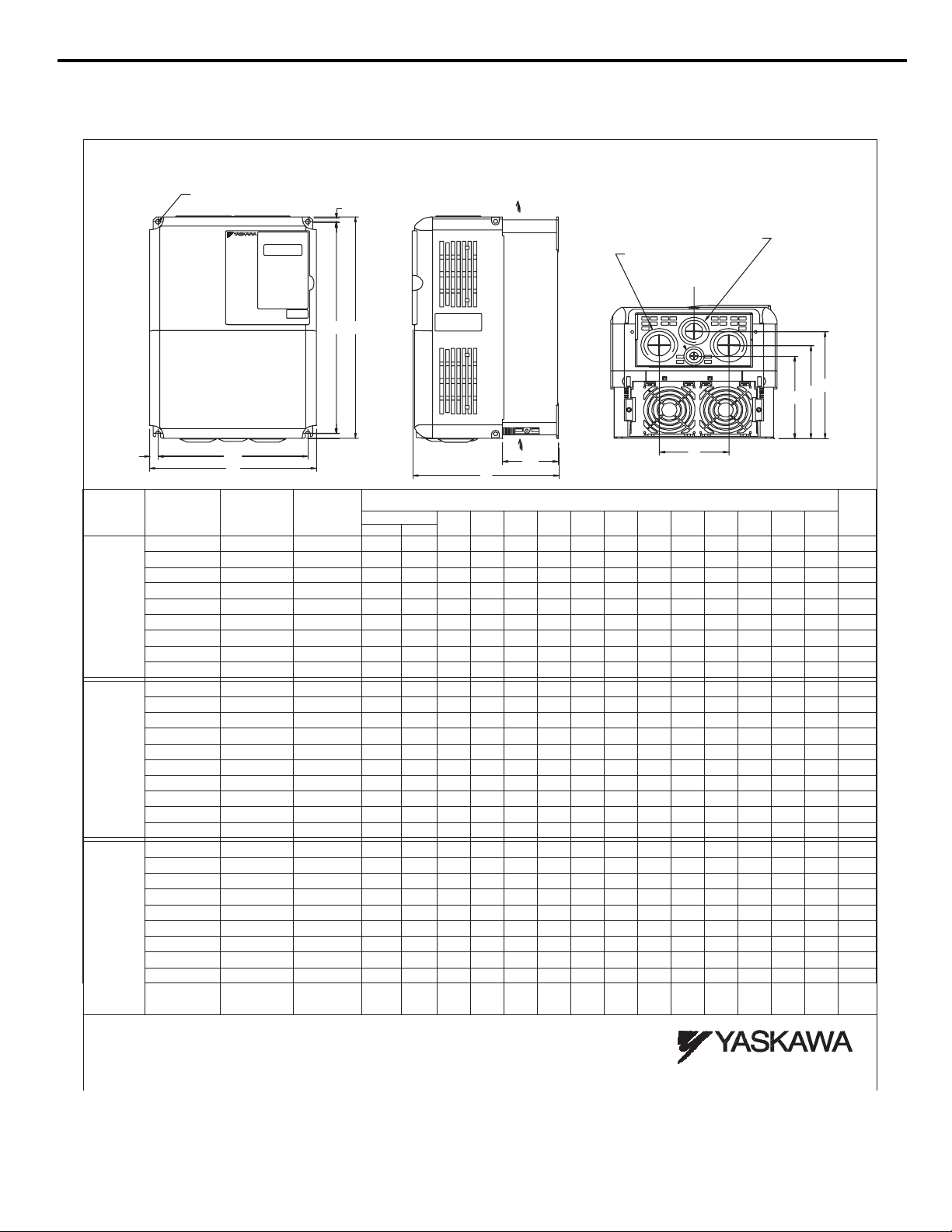
1.4 Exterior and Mounting Dimensions
1.4 Exterior and Mounting Dimensions
Dimensions: iQpump (P7U) (NEMA 1) 208 V/240 V (3.6–74.8 AMPS) 480 V (1.8–40.0 AMPS)
FRONT VIEW
MOUNTING HOLES
RATED
INPUT
208V
240V
480V
W2
CIMR-P7U -107
FOR "A" SIZE SCREW
W1
W
MODEL
20P41
20P71
21P51
22P21
23P71
27P51
20111
20151
20181
20P41
20P71
21P51
22P21
23P71
25P51
27P51
20111
20151
20181
40P41
40P71 2.1
41P51
42P21
43P71
45P51
49P01
40111
40151
RATED
OUTPUT
CURRENT
(AMPS)
10.8
31.0
46.2
59.4
74.8 13.19 8.50 14.96 9.45 .30
10.8
16.8
23.0
31.0
46.2
59.4
74.8
3.7
5.3
7.6
12.5
21.0
27.0
34.0
40.040181
3.6
4.6
7.8
3.6
4.6
7.8
1.8
NOMINAL
1/2 3/4
7.5-10
1/2 3/4
1/2 3/4-
H2
H1
H
HP
-
1
2
3
5
15
20
25
-
1
2
3
5
7.5
10
15
20
25
1
2
3
5
7.5
1017.047P51
15
20
25
30
H1 W1
10.47
10.47
10.47
10.47
11.22
11.22
13.19
10.47
10.47
10.47
10.47
10.47
10.47
11.22
11.22
13.19
13.19 8.50 14.96 9.45 .30 1/4.47 8.27
10.47
10.47
10.47
10.47
10.47
10.47
11.22 7.32 7.8711.81 .28
11.22
13.19
13.19 8.50
FOR REFERENCE ONLY UNLESS PROPERLY ENDORSED.
IN ORDER TO ACHIEVE ADEQUATE COO LING
THE DRIVE MUST BE POSITIONED TO ALLO W A MINIMUM
OF FREE AIR SPACE OF 1.2 I NCHES ON SIDES AND
5 INCHES TOP AND BOTTOM
MOUNTING
4.96
4.96
4.96
4.96
4.9610.47
7.32
7.32
8.50
4.96
4.96
4.96
4.96
4.96
4.96
7.32
7.32
8.50
4.96
4.96
4.96
4.96
4.96
4.96
7.32
8.50 9.45
SIDE VIEW
11.02 5.51
11.02 5.51
11.02
11.02
11.81
12.20
13.78
11.02
11.02
11.02
11.02
11.02
11.02
11.81
12.20
13.78
11.02
11.02 5.51
11.02
11.02
11.02
11.02
11.81 7.87
13.78
AIR
AIR
D1
D
DIMENSIONS IN INCHES
WHH2
5.51
5.51
7.87
7.87
9.45
5.51
5.51
5.51
5.51
5.51
5.51
7.87
7.87
9.45
5.51
5.51
5.51
5.51
5.51
9.4513.78
W2
.28
.28
.28
.28
.28
.28
.28
.28
.28.285.5111.0216.8
.28
.28
.28
.28
.47
.30
.28
.28
.28
.28
.28
.28
.28
.28
.28
.28
.28
.28
.28
.28
.28
.28
.47
.30
.28
.28
.28
.28
.28
.28
.28
.28
.28
.28
.28
.28
.28 7.87 1/4 4.63 6.21 3.07 1.38 13.2
.28 7.87 1/4 4.63
.28
.28
.30
.47
.30
.47
1.38 DIA.
(2) HOLES SIZE "J"
.87 DIA.
C
L
B
F
BOTTOM VIEW
D1 BADCE
1.54
6.30
6.30
6.30
6.30
7.87
7.87
8.27
6.30
6.30
6.30
6.30
7.09
7.09
7.87
7.87
8.27
6.30
6.30
6.30
7.09
7.09
7.09
7.87
8.27
8.27
1.54
1.54
1.54
2.32
2.58
2.58
3.07
3.07
1.54
1.54
1.54
1.54
2.32
2.32
2.58
2.58
3.07
3.07
1.54
1.54
1.54
2.32
2.32
2.32
2.58
2.58
2.58
3.07
3.07
#10
#10
#10
#10
1/4
1/4
1/4
1/4
#10
#10
#10
#10
#10
#10
1/4
1/4
1/4
#10
#10
#10
#10
#10
#10
1/4
1/4
1/4
---
3.35
---
3.35
---
3.35
---
3.35
---
4.63
5.11
4.63
5.11
5.12
5.79
5.12.47 3.945.798.27
---
3.35
---
3.35
3.35
---
---
3.35
---
4.14
---
4.14
4.63
5.11
4.63
5.11
5.12
5.79
5.12
5.79
3.35
---
3.35
---
3.35
---
4.14
---
4.14
---
4.14
---
5.11
5.1111.22 7.32 7.8711.81 .28
4.63
5.11
5.79
5.12 6.65
5.79
5.12
F
1.97
4.73
1.97
4.73
1.97
4.73
1.97
4.73
5.52#10 1.104.14 1.977.09 8.8
3.07
6.21
6.21
3.07
6.65
3.94
6.65
4.73
1.97
4.73
1.97
4.73
1.97
1.97
4.73
1.97
5.52
1.97
5.52
3.07
6.21
6.21
3.07
6.65
3.94
6.65
3.94
4.73
1.97
4.73
1.97
4.73
1.97
5.52
1.97
5.52
1.97
5.52
1.97
6.21
3.07 1.38 13.2
6.21
3.07
3.94
6.65
3.94
E
C
J
1.10
1.10
1.10
1.10
1.38
1.38
1.73
1.73 24.2
1.10
1.10
1.10
1.10
1.10
1.10
1.38
1.38
1.73
1.73
1.10
1.10 6.6
1.10
1.10
1.10
1.10
1.38 13.2
1.732222
1.73
APPROX.
WEIGHT
(LBS.)
6.6
6.6
6.6
6.6
13.2
15.4
24.2
6.6
6.6
6.6
6.6
8.8
8.8
13.2
15.4
24.2
24.2
6.6
6.6
8.8
8.8
8.8
Figure 1.8 Exterior and Mounting Dimensions
YASKAWA TM.iQp.01 iQpump Drive User Manual 17
Page 18
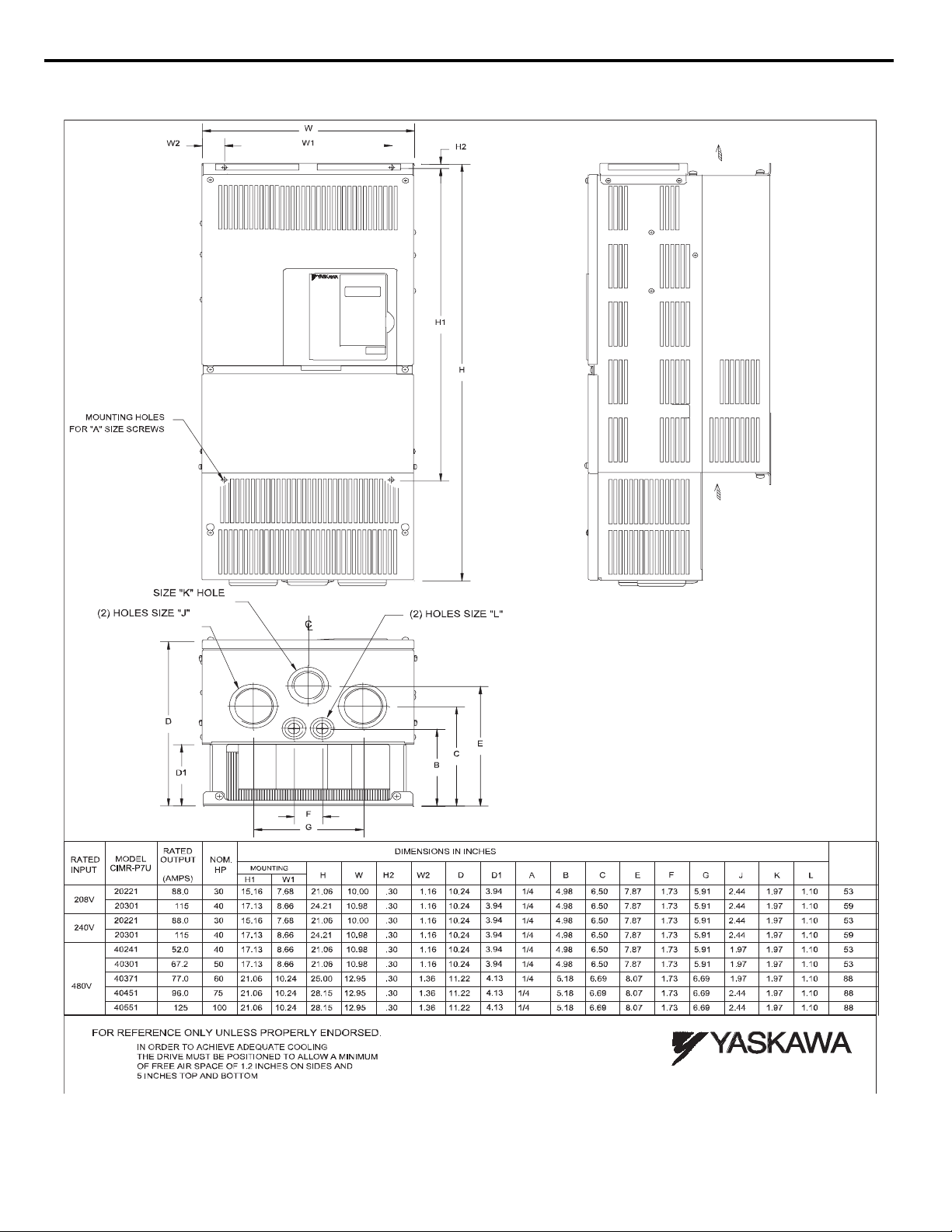
1.4 Exterior and Mounting Dimensions
Dimensions: iQpump (P7U) (NEMA 1) 208 V/240 V (88.0–115 AMPS) 480 V (52.0–125 AMPS)
APPROX.
CURRENT
WEIGHT
(LBS.)
Figure 1.9 Exterior and Mounting Dimensions
18 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 19

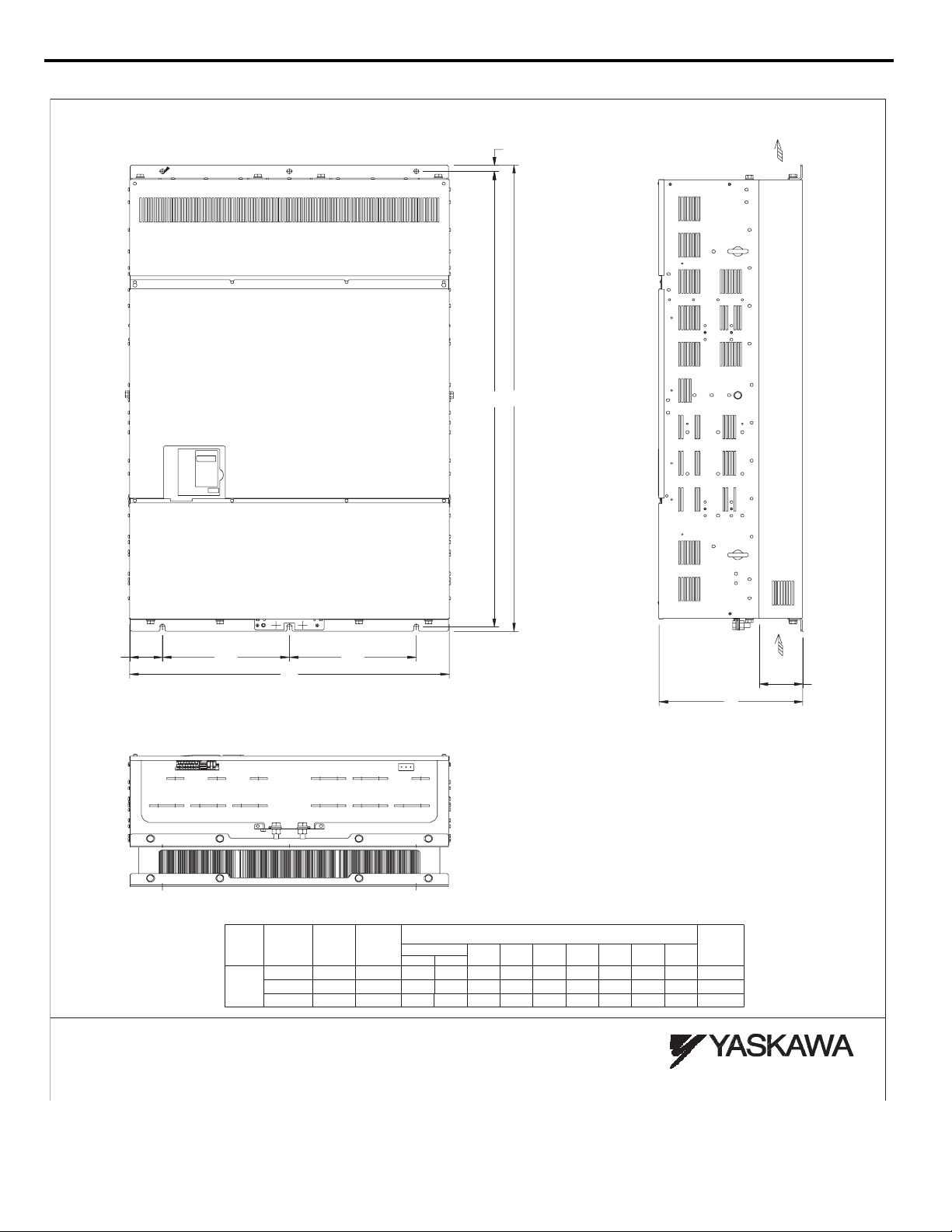
1.4 Exterior and Mounting Dimensions
Dimensions: iQpump (P7U) (Protected Chassis) 208–230 V (162–415 AMPS) 480 V (156–304 AMPS)
FRONT VIEW
MOUNTING HO LES
FOR "A" SIZE SCREW
H2
H1
H
AIR
W2
W1
W
FOR REFERENCE ONLY UNLESS PROPERLY ENDORSED.
IN ORDER TO ACHIEVE ADEQUATE COOLING
THE DRIVE MUST BE POSITIONED TO ALLOW A MINIMUM
OF FREE AIR SPACE OF 1.2 INCHES ON SIDES AND
5 INCHES TOP AND BOTTOM
RATED
INPUT
208V
230V
480V
MODEL
CIMR-P7U
20370
20450
20550
20750
20900
21100
20370
20450
20750
20900
40900
41100
41600
RATED
OUTPUT
CURRENT
(AMPS)
162
215
312
360
415
162
192
312
360
15640750
180
240
304
AIR
D1
D
NOM.
MOUNTING
HP
H1 W1
22.64
50
22.6460
27.56
75
32.28
125
33.66
150
22.64 23.629.84 14.76 .49 1253.9411.812.46 3/8
50-60
22.64 23.629.84 14.76 .49 1395.1212.992.46 3/8
75
100-125
27.56 28.5412.80 17.72 .49 1915.1213.782.46 3/8
32.28 33.4614.57 19.69 .59 2385.1214.172.56 3/8
150
125
27.56
27.56
150
32.28
200
33.66
250
DIMENSIONS IN INCHES
HWH2W2D
9.84
9.84
12.80
14.57
17.52
12.80
12.80
14.57
17.52
23.62
23.62
28.54
33.46
34.84
28.54
28.54
33.46
36.06
14.76
.49
14.76
.49
17.72
.49
19.69
.59 2.56
22.64 .59
17.72
.49
17.72
.49 196
19.69
.59
22.64
.59
2.46
2.46
12.99192
13.78
2.46
2.4617.72 .4912.8027.56 28.54100
13.78
14.17
2.56
14.96
13.78
2.46
13.78
2.46 3/8
14.17
2.56
14.96
2.56
11.81
D1 A
3.94
5.12
5.12
5.12
5.12
5.51
5.12
5.12
5.12
5.51
APPROX.
WEIGHT
(LBS.)
125
3/8
139
3/8
189
3/8
191
3/8
238
3/8
330
3/8
194
3/8
224
3/8
352
3/8
Figure 1.10 Exterior and Mounting Dimensions
YASKAWA TM.iQp.01 iQpump Drive User Manual 19
Page 20
1.4 Exterior and Mounting Dimensions
Dimensions: iQpump (P7U) (Protected Chassis)
MOUNTING HOLES
FOR "A" SIZE SCREWS
H1
H2
AIR
H
W2
W1
W1
W
RATED
INPUT
480V
CIMR-P7U
CURRENT
(AMPS)
41441850
42200
43000 58.07
300-350
675
RATED
OUTPUT
MODEL
FOR REFERENCE ONLY UNLESS PROPERLY ENDORSED.
IN ORDER TO ACHIEVE ADEQUATE COOLING
THE DRIVE MUST BE POSITIONED TO ALLOW A MINIMUM
OF FREE AIR OF 1.2 INCHES ON SIDES AND
5 INCHES TOP AND BOTTOM
NOM.
HP
500
MOUNTING
H1 W1
50.00
50.00400-450
56.70
HWH2W2D
51.38
10.63
10.63
14.37
51.38
27.95
27.95
36.06
.79
.79
.79
DIMENSIONS IN INCHES
16.34
3.35
16.34515
3.35
16.34
3.66
D1 A
4.94
4.94
4.94
AIR
D1
D
APPROX.
WEIGHT
(LBS.)
3/8
572
3/8
616
3/8
891
Figure 1.11 Exterior and Mounting Dimensions
20 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 21

1.5 Heat Loss Data
1.5 Heat Loss Data
Table 1.3 200V Class Heat Loss Data
Drive
TYPE
CIMR-P7U-107
20P4 1.4 3.6 19 39 58 Self
20P7 1.8 4.6 26 42 68 Self
21P5 3.0 7.8 48 50 98 Self
22P2 4.1 10.8 68 59 127 Self
23P7 6.4 16.8 110 74 184 Fan
25P5 8.8 23 164 84 248 Fan
27P5 12 31 219 113 332 Fan
2011 18 46.2 357 168 524 Fan
2015 23 59.4 416 182 597 Fan
2018 29 74.8 472 208 680 Fan
2022 34 88 583 252 835 Fan
2030 44 115 883 333 1217 Fan
2037 62 162 1010 421 1430 Fan
2045 73 192 1228 499 1727 Fan
2055 82 215 1588 619 2206 Fan
2075 120 312 1956 844 2800 Fan
2090 140 360 2194 964 3157 Fan
2110 160 415 2733 1234 3967 Fan
(Inverter)
Capacity
(kVA)
Rated
Output
Current
(A)
Cooling Fin Side
(W)
Internal
Unit Side (W)
Tot al
Watt Loss
(W)
Table 1.4 400V Class Heat Loss Data
Drive
TYPE
CIMR-P7U-107
40P4 1.4 1.8 14 39 53 Self
40P7 1.6 2.1 17 41 58 Self
41P5 2.8 3.7 36 48 84 Self
42P2 4.0 5.3 59 56 115 Fan
43P7 5.8 7.6 80 68 140 Fan
44P0 6.6 8.7 90 70 160 Fan
45P5 9.5 12.5 127 81 209 Fan
47P5 13 17 193 114 307 Fan
49P0 16 21 232 158 390 Fan
4011 21 27 232 158 390 Fan
4015 26 34 296 169 465 Fan
4018 30 40 389 201 590 Fan
4022 38 50.4 420 233 653 Fan
4024 40 52 691 297 989 Fan
4030 51 67.2 691 297 989 Fan
4037 59 77 801 332 1133 Fan
4045 73 96 901 386 1287 Fan
4055 95 125 1204 478 1682 Fan
4075 120 156 1285 562 1847 Fan
4090 140 180 1614 673 2287 Fan
4110 180 240 1889 847 2736 Fan
4132 200 260 2388 1005 3393 Fan
4160 230 304 2636 1144 3936 Fan
4185 315 414 2791 1328 3964 Fan
4220 390 515 3797 1712 5509 Fan
4300 510 675 5838 2482 8319 Fan
(Inverter)
Capacity
(kVA)
Rated
Output
Current
(A)
Cooling Fin Side
(W)
Internal
Unit Side (W)
Tot al
Watt Loss
(W)
Cooling Method
Cooling Method
YASKAWA TM.iQp.01 iQpump Drive User Manual 21
Page 22
1.6 Checking and Controlling the Installation Site
1.6 Checking and Controlling the Installation Site
Install the iQpump drive as described below and maintain optimum conditions.
WARNING
The iQpump drive heatsink temperature may exceed 158°F (70°C). Therefore, mount the iQpump drive to a surface
suitable for high temperature.
◆ Installation Site
Locate the iQpump drive as close as possible to the motor. Install the iQpump drive under the following conditions in UL Pollution
Degree 1 & 2 environments. This excludes wet locations where surfaces may become conductive due to moisture and contaminant
loading.
Table 1.5 Installation Site Specifications
Typ e Ambient Operating Temperature Humidity Plenum Rated
NEMA Type 1 14°F-to 104°F (-10-to 40°C) 95%-RH-or-less-(no-condensation) Yes
Open Chassis 14°F-to 113°F (-10 to +45°C) 95%-RH-or-less-(no-condensation) No
Protective covers are attached to the top and bottom of the iQpump drive. It is recommended to remove the protective covers before
operating a CIMR-P7U2030/4055-107 iQpump drive and smaller in a panel to obtain the 113°F (45°C) ambient operating temperature.
Observe the following precautions when installing the iQpump drive:
• in a clean location which is free from oil mist and dust.
• in an environment where metal shavings, oil, water, or other foreign materials will not get into the iQpump drive enclosure.
• in a location free from radioactive materials.
• in a location free from harmful gasses and liquids.
• in a location free from excessive vibration.
• in a location free from chlorides.
• in a location away from direct sunlight.
• on a non-combustible surface.
◆ Controlling the Ambient Temperature
To enhance the reliability of operation, the iQpump drive should be installed in an environment free from extreme temperature variations.
If the iQpump drive is installed in an enclosure, use a cooling fan or air conditioner to maintain the internal air temperature below 113°
(45°C).
◆ Protecting the iQpump Drive from Foreign Matter
During iQpump drive installation and project construction it is possible to have foreign matter, such as metal shavings or wire clippings,
fall inside the iQpump drive. To prevent foreign matter from falling into the iQpump drive, place a temporary cover over the iQpump
drive.
Always remove the temporary cover from the iQpump drive before Start-Up. Otherwise, ventilation will be reduced, causing the iQpump
drive to overheat.
F
22 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 23

1.7 Installation Orientation and Clearances
1.7 Installation Orientation and Clearances
Install the iQpump drive vertically so as not to reduce the cooling efficiency. When installing the iQpump drive, always provide the
following installation clearances to allow normal heat dissipation. For 3HP, 208V/240V (CIMR-P7U22P2-107 and below) or 2HP, 480V
(CIMR-P7U41P-107 and below), ensure that the heatsink is against a closed surface to avoid diverting cooling air around the heatsink.
4.75 in (120 mm. minimum)
1.2 in
(30.5 MM.) min.
1.2 in
(30.5 mm. minimum)
4.75 in (50 mm. minimum)
Horizontal Clearance
1.2 in
(30.5 mm. minimum)
4.75 in (120 mm. minimum)
Air
4.75 in (120 mm. minimum)
Air
Vertical Clearance
IMPORTANT
Figure 1.12 iQpump Drive Installation Orientation and Clearance
• The same clearance is required horizontally and vertically for both Open Chassis (IP00) and NEMA
Type 1 iQpump drives.
1. Always remove the top and bottom protection covers before installing a CIMR-P7U2018/4018-107
and smaller iQpump drive in a panel. Always provide enough clearance for lifting eye bolts and the
main circuit wiring when installing a CIMR-P7U2022/4030-107 and larger iQpump drive in a panel.
YASKAWA TM.iQp.01 iQpump Drive User Manual 23
Page 24
1.8 Removing and Attaching the Terminal Cover
1.8 Removing and Attaching the Terminal Cover
Remove the terminal cover to connect cables to the control circuit and main circuit terminals.
WARNING
Prior to removing any protective cover or wiring any part of the iQpump drive, remove all power sources, including
main input power and control circuit power. Wait a minimum of 5 minutes after power removal, before removing any
cover. The charge lamp located within the iQpump drive should be off prior to working inside. Even if the charge lamp is
off, one must measure the AC input, output, and DC Bus potential to insure safe levels prior to resuming work. Failure to
adhere to this warning may result in personal injury or death.
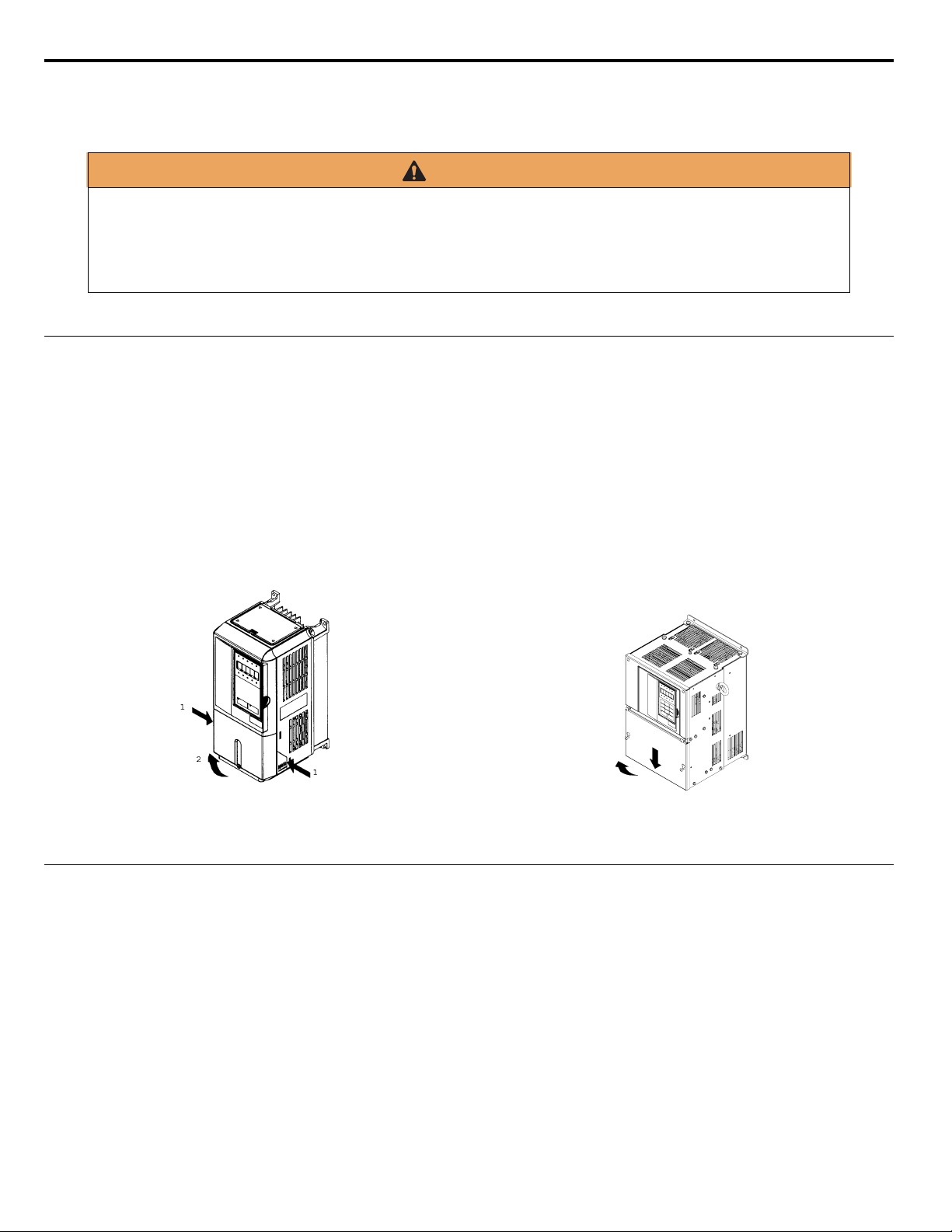
◆ Removing the Terminal Cover
■ Models CIMR-P7U20P4 through 2018 (0.5HP to 25HP @ 208V/240V) and 40P4 through 4018
(0.5HP to 30HP @ 480V)
Loosen the screw at the bottom of the terminal cover, press in on the sides of the terminal cover in the directions of arrows 1, and then lift
up on the terminal in the direction of arrow 2. Refer to Figure 1.13.
■ Models CIMR-P7U2022 through 2110 (30HP to 150HP @ 208V/240V) and 4030 through 4300
(40HP to 500HP @ 480V)
Loosen the screws on the left and right at the top of the terminal cover, pull down the terminal cover in the direction of arrow 1 and then
lift up on the terminal cover in the direction of arrow 2. Refer to Figure 1.14.
Figure 1.1
1
2
Figure 1.13 Removing the Terminal Cover Figure 1.14 Removing the Terminal Cover
◆ Attaching the Terminal Cover
After wiring the terminal block, attach the terminal cover by reversing the removal procedure.
For Models CIMR-P7U2018/4018-107 and smaller, insert the tab on the top of the terminal cover into the groove on the iQpump drive
and press in on the bottom of the terminal cover until it snaps into place.
For iQpump drives CIMR-P7U2022/4030-107 and larger, insert the tab on the top of the terminal cover into the groove on the iQpump
drive, and secure the terminal cover by lifting it up toward the top of the iQpump drive.
24 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 25
1.9 Removing/Attaching the Digital Operator and Front Cover
1.9 Removing/Attaching the Digital Operator and Front Cover
◆ Models CIMR-P7U20P4 through 2018 (0.5HP to 25HP @ 208V/240V) and
40P4 through 4018 (0.5HP to 30HP @ 480V)
For Models CIMR-P7U2018/4018-107 and smaller, remove the terminal cover and then use the following procedures to remove the
Digital Operator and front cover.
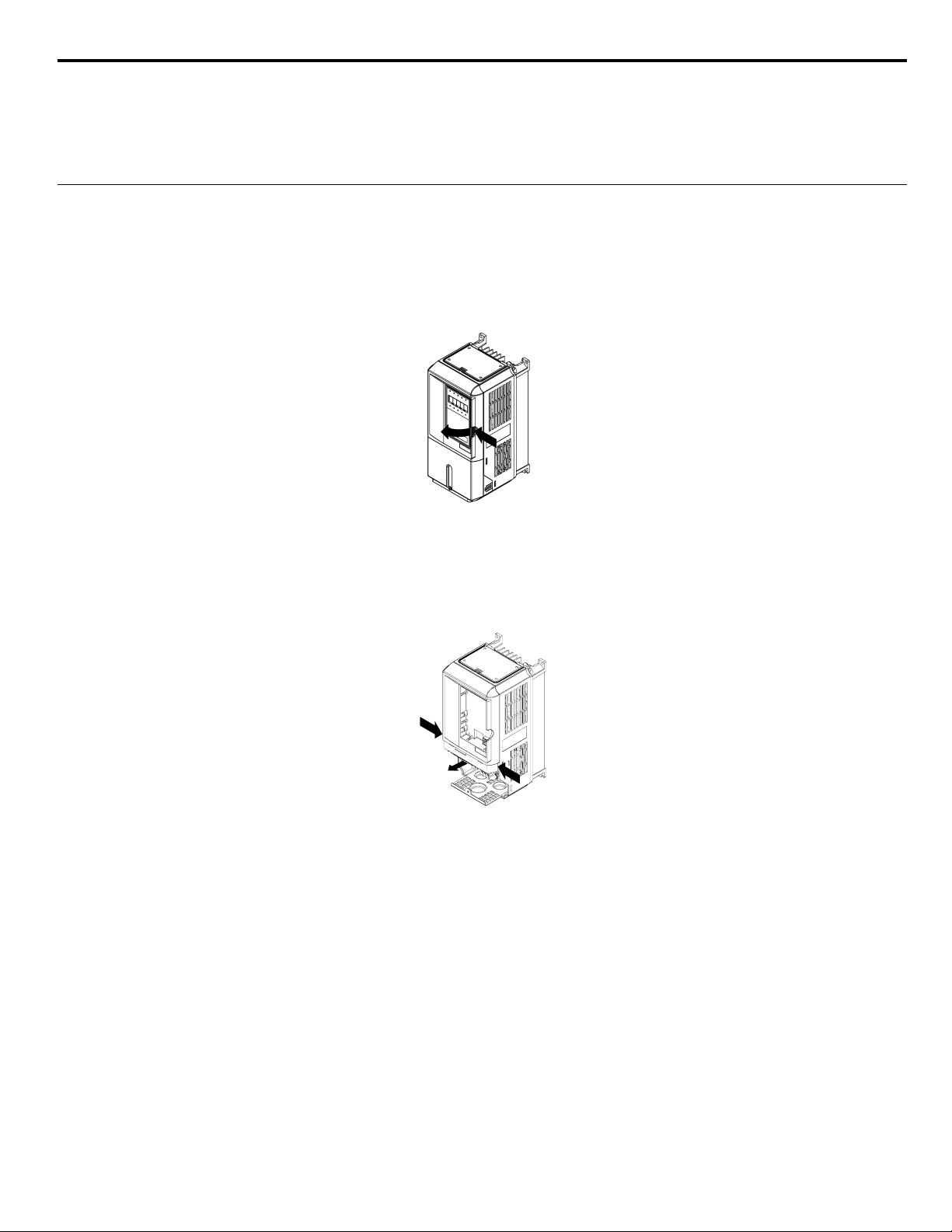
■ Removing the Digital Operator
Press on the side of the Digital Operator in the direction of arrow 1 to unlock, then lift the Digital Operator in the direction of arrow 2 to
remove it as shown in Figure 1.15.
2
1
Figure 1.15 Removing the Digital Operator
■ Removing the Front Cover
Press the left and right sides of the front cover in the direction of arrows 1 and lift the bottom of cover in the direction of arrow 2 to
remove it as shown in Figure 1.16.
1
2
Figure 1.16 Removing the Front Cover
■ Attaching the Front Cover
Mount the front cover to the iQpump drive by performing the steps to remove the front cover in reverse order.
1. Do not mount the front cover with the Digital Operator attached to the front cover; this may cause the Digital Operator to malfunction
due to imperfect contact.
2. Insert the tab of the upper part of the front cover into the groove of the iQpump drive and press the lower part of the front cover onto
the iQpump drive until the front cover snaps into place.
YASKAWA TM.iQp.01 iQpump Drive User Manual 25
Page 26
1.9 Removing/Attaching the Digital Operator and Front Cover
◆ Models CIMR-P7U2022 through 2110 (30HP to 150HP @ 208V/240V) and
4030 through 4300 (40HP to 500HP @ 480V)
For Models CIMR-P7U2022/4030-107 and larger, remove the terminal cover and then use the following procedures to remove the
Digital Operator and front cover.
■ Removing the Digital Operator
Use the same procedure for Models CIMR-P7U2018/4018-107 and smaller.
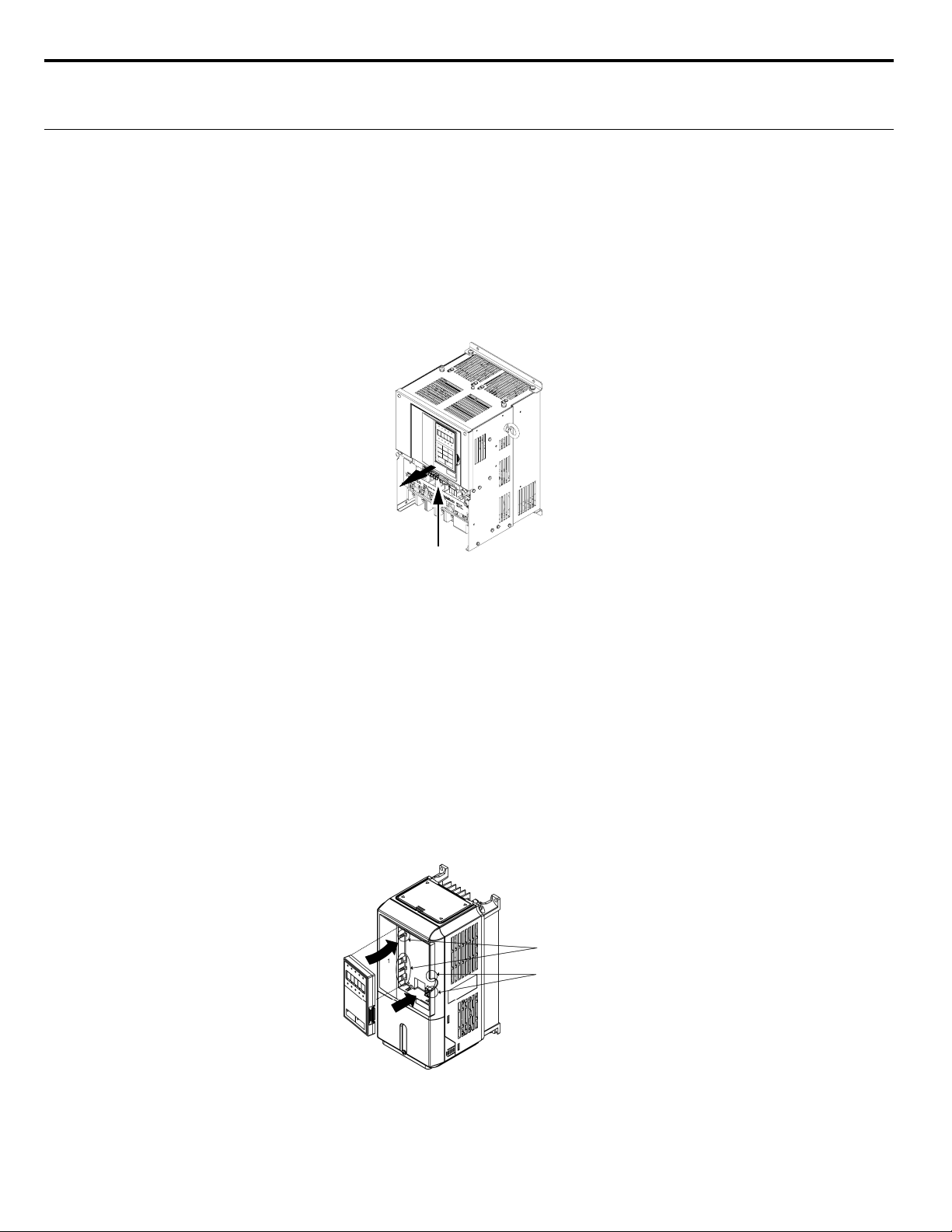
■ Removing the Front Cover
Loosen all screws on the front cover. Lift up at the location labeled 1 at the top of the control circuit terminal card and move in the
direction of arrow 2.
2
1
Figure 1.17 Removing the Front Cover
■ Attaching the Front Cover
Attach the front cover by reversing the procedure to remove it.
1. Confirm that the Digital Operator is not mounted on the front cover. Contact faults can occur if the cover is attached while the Digital
Operator is mounted to it.
2. Insert the tab on the top of the front cover into the slot on the iQpump drive and press in on the cover until it snaps into place on the
iQpump drive.
■ Attaching the Digital Operator
After attaching the front cover, mount the Digital Operator onto the iQpump drive using the following procedure.
1. Hook the Digital Operator at A (two locations) on the front cover by moving in the direction of arrow 1 as shown in the following
illustration.
2. Press the Digital Operator in the direction of arrow 2 until it snaps in place at B (two locations).
A
1
B
2
Figure 1.18 Mounting the Digital Operator
26 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 27

IMPORTANT
1.9 Removing/Attaching the Digital Operator and Front Cover
• Do not remove or attach the Digital Operator or mount or remove the front cover using methods other
than those described above, damage to the Digital Operator or iQpump drive may occur.
• Never attach the front cover to the iQpump drive with the Digital Operator attached to the front cover.
Damage to the Digital Operator may occur. Always attach the front cover to the iQpump drive first,
and then attach the Digital Operator to the front cover.
YASKAWA TM.iQp.01 iQpump Drive User Manual 27
Page 28

1.9 Removing/Attaching the Digital Operator and Front Cover
THIS PAGE INTENTIONALLY LEFT BLANK.
28 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 29

2
Electrical Installation
This chapter describes wiring terminals, main circuit terminal connections, main circuit terminal
wiring specifications, control circuit terminals, and control circuit wiring specifications.
2.1 Terminal Block Configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.2 Wiring Main Circuit Terminals . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.3 Control Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
YASKAWA TM.iQp.01 iQpump Drive User Manual 29
Page 30

2.1 Terminal Block Configuration
2.1 Terminal Block Configuration
The wiring terminals are shown in Figure 2.1.
AC MP
-V
+V
Control circuit terminals
A1
SCS+A2
SN M6
S1
S4SPS7 M4
S3
E(G) E(G)
S5
AC MA
AMS6
FM
AC
R- M5
R+RP
IG
MCMB
M3S2 S-
M2
M1
Main circuit terminals
Charge indicator
Ground terminal
Control circuit terminals
Main circuit terminals
Models CIMR-_ _ _2018 (25 HP, 208V)/
4018 (30 HP, 480V) and smaller
AC MP
-V
R- M5FMR+RP
+V
A1
SCS+A2
SN M6
S1
E(G) E(G)
AC MA
AMS6
S5
IG
S4SPS7 M4
S3
AC
MCMB
M3S2 S-
M2
M1
Ground terminal
Charge indicator
Ground terminal
Ground terminal
Models CIMR-_ _ _2022 (30 HP, 208V)/
4030 (40 HP, 480V) and larger
Figure 2.1 iQpump Drive Terminal Configuration
30 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 31

2.2 Wiring Main Circuit Terminals
◆ Applicable Wire Sizes and Closed-Loop Connectors
Select the appropriate wires and crimp terminals from Table 2.1 to Ta bl e 2 .2 .
Table 2.1 208-240 VAC Wire Sizes and Connector Specifications
2.2 Wiring Main Circuit Terminals
Drive Model
CIMR-P7U❑-107
20P4 0.5/0.75
20P7 2
21P5 1.5/2
22P2 3
23P7 5
25P5 7.5
27P5 10
Nominal
Hp
Terminal Symbol
R/L1, S/L2, T/L3, , 1, 2,
B1, B2, U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2,
B1, B2, U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2,
B1, B2, U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2,
B1, B2, U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2,
B1, B2, U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2,
B1, B2, U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2,
B1, B2, U/T1, V/T2, W/T3
Ter min al
Screws
M4
M4
M4
M4
M4
M4
M5
Clamping
Tor que
lb. in.
(N•m)
13.3
(1.5)
13.3
(1.5)
13.3
(1.5)
13.3
(1.5)
13.3
(1.5)
13.3
(1.5)
22.1
(2.5)
Recommended
Wire Size
AWG
2
(mm
)
14
(2.1)
14
(2.1)
14
(2.1)
12
(3.3)
10
(5.3)
10
(5.3)
8
(8)
Wire
Typ e
2011 15
2015 20
2018 25
2022 30
2030 40
R/L1, S/L2, T/L3, , 1, 2,
B1, B2, U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, U/T1, V/T2, W/T3
B1, B2
R/L1, S/L2, T/L3, , 1, 2, U/T1, V/T2, W/T3
B1, B2
R/L1, S/L2, T/L3, , 1, U/T1, V/T2,
W/T3, R1/L11, S1/L21, T1/L31
3
R/L1, S/L2, T/L3, , 1 U/T1,
V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
M5
M6
M5
M6
M8
M5
M6
M8
M6
M8
M8
M6
M8
22.1
(2.5)
44.3
(5.0)
22.1
(2.5)
44.3
(5.0)
88.5
(10.0)
22.1
(2.5)
44.3
(5.0)
88.5
(10.0)
45.1
(5.1)
88.5
(10.0)
88.5
(10.0)
45.1
(5.1)
88.5
(10.0)
6
(13.3)
4
(21.2)
6
(13.3)
6
(13.3)
2
(33.6)
6
(13.3)
4
(21.2)
1
(42.4)
4
(21.2)
4
(21.2)
1/0
(53.5)
4
(21.2)
2
(38)
600 VAC
UL Approved
vinyl-sheathed
or equivalent
YASKAWA TM.iQp.01 iQpump Drive User Manual 31
Page 32

2.2 Wiring Main Circuit Terminals
Drive Model
CIMR-P7U❑-107
2037 50
2045 60
2055 75
2075 75/100
2090 125
2110 150
* Use 75°C copper wire or equivalent
Nominal
Hp
Terminal Symbol
R/L1, S/L2, T/L3, , 1 U/T1,
V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
r/
l1, s/l2
R/L1, S/L2, T/L3, , 1 U/T1,
V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
l1, s/l2
r/
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
l1, s/l2
r/
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
l1, s/l2
r/
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
l1, s/l2
r/
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
l1, s/l2
r/
Ter minal
Screws
M10
M8
M10
M4
M10
M8
M10
M4
M12
M10
M8
M10
M4
M12
M10
M8
M10
M4
M12
M12
M8
M12
M4
M12
M12
M8
M12
M4
Clamping
Tor qu e
lb. in.
(N•m)
199
(22.5)
88.5
(10.0)
203.6
(23)
12.4
(1.4)
199
(22.5)
88.5
(10.0)
199
(22.5)
12.4
(1.4)
347
(39.2)
199
(22.5)
88.5
(10.0)
199
(22.5)
12.4
(1.4)
347
(39.2)
199
(22.5)
88.5
(10.0)
199
(22.5)
12.4
(1.4)
347
(39.2)
347
(39.2)
88.5
(10.0)
347
(39.2)
12.4
(1.4)
347
(39.2)
347
(39.2)
88.5
(10.0)
347
(39.2)
12.4
(1.4)
Recommended
Wire Size
AWG
2
(mm
)
4/0
(100)
4
(22)
2/0
(67.4)
14
(2.1)
300
(152)
4
(21.2)
3/0
(85)
14
(2.1)
1/0 X 2P
(53.5 X 2P)
1/0 X 2P
(53.5 X 2P)
2/0
(67.4)
4/0
(107.2)
14
(2.1)
4/0 X 2P
(80 X 2P)
3/0 X 2P
(85 X 2P)
2/0
(67.4)
2/0 X 2P
(67.4 X 2P)
14
(2.1)
250 x2P
(127 x2P)
4/0 X 2P
(107.2 X 2P)
2/0
(67.4)
2/0 X 2P
(67.4 X 2P)
14
(2.1)
300 X 2P
(152 X 2P)
300 X 2P
152 X 2P
2/0
(67.4)
4/0 X 2P
(107.2 X 2P)
16
(1.25)
Wire
Type
600 VAC
UL Approved
vinyl-sheathed
or equivalent
32 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 33

2.2 Wiring Main Circuit Terminals
Table 2.2 480 VAC Wire Sizes and Connector Specifications
Drive Model
CIMR-P7U❑-107
40P4 0.5/0.75
40P7 1
41P5 1.5/2
42P2 3
43P7 5
45P5 7.5
47P5 10
49P0/4011 15/20
4015 25
Nominal
Hp
Term i n al Sy m b o l
R/L1, S/L2, T/L3, , 1, 2,
B1, B2, U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2,
B1, B2, U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2,
B1, B2, U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2,
B1, B2, U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2,
B1, B2, U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2,
B1, B2, U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2,
B1, B2, U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2,
B1, B2, U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2,
B1, B2, U/T1, V/T2, W/T3
Ter min al
Screws
M4
M4
M4
M4
M4
M4
M4
M5
M5
Clamping
Tor que
lb. in.
(N•m)
13.3
(1.5)
13.3
(1.5)
13.3
(1.5)
13.3
(1.5)
13.3
(1.5)
13.3
(1.5)
13.3
(1.5)
22.1
(2.5)
22.1
(2.5)
Recommended
Wire Size AWG
(mm
2)
14
(2.1)
14
(2.1)
14
(2.1)
14
(2)
14
(2.1)
14
(2.1)
12
(3.5)
14
(2)
10
(5.5)
12
(3.5)
8
(8)
10
(5.5)
8
(8)
Wire Type
600 VAC
UL Approved
vinyl-sheathed
or equivalent
4018 30
4024/4030 40/50
4037 60
4045 75
R/L1, S/L2, T/L3, , 1, 3, U/T1, V/T2, W/T3,
B1, B2
R/L1, S/L2, T/L3, , 1, 3, U/T1, V/T2, W/T3, R1/
L11, S1/L21, T1/L31
R/L1, S/L2, T/L3, , 1, U/T1, V/T2, W/T3, R1/L11,
S1/L21, T1/L31
3
R/L1, S/L2, T/L3, , 1, U/T1, V/T2, W/T3, R1/L11,
S1/L21, T1/L31
3
M6
M5
M6
M6
M8
M8
M6
M8
M8
M6
M8
44.3
(5.0)
21.1
(2.5)
44.3
(5.0)
44.3
(5.0)
88.5
(10.0)
88.5
(10.0)
44.3
(5.0)
88.5
(10.0)
88.5
(10.0)
44.3
(5.0)
88.5
(10.0)
6
(13.3)
8
(8)
6
(13.3)
3
(26.7)
6
(13.3)
2
(33.6)
4
(21.2)
4
(21.2)
2
(33.6)
4
(21.2)
4
(21.2)
YASKAWA TM.iQp.01 iQpump Drive User Manual 33
Page 34

2.2 Wiring Main Circuit Terminals
Drive Model
CIMR-P7U❑-107
4055 100
4075 125
4090 150
4110 200
4160 250
Nominal
Hp
Terminal Symbol
R/L1, S/L2, T/L3, , 1, U/T1, V/T2,
W/T3, R1/L11, S1/L21, T1/L31
3
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
r/
l1, s200/l
200, s400/l2400
2
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
l1, s200/l
r/
200, s400/l2400
2
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
l1, s200/l
r/
200, s400/l2400
2
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
l1, s200/l
r/
200, s400/l2400
2
Ter min al
Screws
M8
M6
M8
M12
M10
M8
M12
M4
M12
M10
M8
M12
M4
M12
M12
M8
M12
M4
M12
M12
M8
M12
M4
Clamping
Tor que
lb. in.
(N•m)
88.5
(10.0)
44.3
(5.0)
88.5
(10.0)
347
(39.2)
199
(22.5)
88.5
(10.0)
347
(39.2)
12.4
(1.4)
347
(39.2)
199
(22.5)
88.5
(10.0)
347
(39.2)
12.4
(1.4)
347
(39.2)
347
(39.2)
88.5
(10.0)
347
(39.2)
12.4
(1.4)
347
(39.2)
347
(39.2)
88.5
(10.0)
347
(39.2)
12.4
(1.4)
Recommended
Wire Size AWG
(mm
2)
2/0
(33.6)
4
(21.2)
1
(42.4)
4/0
(107.2)
3/0
(85)
4/0
(107.2)
1/0
(53.5)
14
(2.1)
250
(127)
4/0
(107.2)
4/0
(107.2)
2/0
(67.4)
14
(2.1)
2/0 X 2P
(67.4 X 2P)
1/0 X 2P
(53.5 X 2P)
2/0
(67.4)
4/0
(107.2)
14
(2.1)
4/0 X 2P
(107.2 X 2P)
3/0 X 2P
(85 X 2P)
2/0
(67.4)
1/0 X 2P
(53.5 X 2P)
14
(2.1)
Wire Type
600 VAC
UL Approved
vinyl-sheathed
or equivalent
34 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 35

2.2 Wiring Main Circuit Terminals
Drive Model
CIMR-P7U❑-107
4185 300/350
4220 400/450
4300 500+
* Use 75°C copper wire or equivalent
Nominal
Hp
Term i n al Sy m b o l
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L33
3
r/
l1, s200/l
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L33
l1, s200/l
r/
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L33
r/
l1, s200/l
200, s400/l2400
2
3
200, s400/l2400
2
3
200, s400/l2400
2
Ter min al
Screws
M8
M8
M8
M16
M4
M8
M8
M8
M16
M4
M8
M8
M8
M8
M16
Clamping
Tor que
lb. in.
(N•m)
88.5
(10.0)
88.5
(10.0)
88.5
(10.0)
867.4
(98.0)
12.4
(1.4)
88.5
(10.0)
88.5
(10.0)
88.5
(10.0)
867.4
(98.0)
12.4
(1.4)
88.5
(10.0)
88.5
(10.0)
88.5
(10.0)
867.4
(98.0)
12.4
(1.4)
Recommended
Wire Size AWG
2)
(mm
300 X 2P
(152 X 2P)
300 X 2P
(152 X 2P)
2/0
(67.4)
3/0 X 2P
(85 X 2P)
14
(2.1)
500 X 2P
(253 X 2P)
400 X 2P
(203 X 2P)
2/0
(67.4)
250 X 2P
(127 X 2P)
14
(2.1)
700 X 2P
(355 X 2P)
600 X 2P
(304 X 2P)
2/0
(67.4)
400 X 2P
(203 X 2P)
14
(2.1)
Wire Type
600 VAC
UL Approved
vinyl-sheathed
or equivalent
IMPORTANT
Determine the wire size for the main circuit so that line voltage drop is within 2% of the rated voltage.
Line voltage drop is calculated as follows:
Line voltage drop (V) = x wire resistance (W/km) x wire length (m) x current (A) x 10
3
-3
WARNING
Prior to removing any protective cover or wiring any part of the iQpump drive, remove all power sources, including
main input power and control circuit power. Wait a minimum of 5 minutes after power removal, before removing any
cover. The charge lamp located within the iQpump drive should be off prior to working inside. Even if the charge lamp is
off, one must measure the AC input, output, and DC Bus potential to insure safe levels prior to resuming work. Failure to
adhere to this warning may result in personal injury or death.
YASKAWA TM.iQp.01 iQpump Drive User Manual 35
Page 36

2.2 Wiring Main Circuit Terminals
◆ Main Circuit Terminal Functions
Main circuit terminal functions are summarized according to terminal symbols in Tab le 2. 3 . Wire the terminals correctly for the desired
purpose.
Table 2.3 Main Circuit Terminal Functions (208-240 VAC and 480 VAC)
Purpose Terminal Designation
Main circuit power input
Drive outputs
DC power input
DC reactor connection
Ground 20P4 to 2110 40P4 to 4300
R/L1, S/L2, T/L3
R1/L11, S1/L21, T1/L31
U/T1, V/T2, W/T3
1,
1, 2
208-240 VAC 480 VAC
20P4 to 2110 40P4 to 4300
2022 to 2110 4030 to 4300
20P4 to 2110 40P4 to 4300
20P4 to 2110 40P4 to 4300
20P4 to 2018 40P4 to 4018
Model: CIMR-P7U❑-107
36 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 37

◆ Main Circuit Configurations 208-240 VAC
The 208-240 VAC main circuit configurations of the iQpump drive are shown in Table 2.4.
Table 2.4 iQpump Drive Main Circuit Configurations
208-240 VAC
2.2 Wiring Main Circuit Terminals
Note
Notes
1 & 3
1
{
{
CIMR-_ _ _ 20P4 to 2018
(1/2 Hp to 25 Hp)
Power
supply
CIMR-_ _ _ 2037 to 2110
(50 Hp to 150 Hp)
Control
circuits
Notes
1 & 3
CIMR-_ _ _ 2022 and 2030
(30 Hp to 40Hp)
{
—
Power
supply
Control
circuits
Power
supply
Note: 1. Input fuses or molded case circuit breakers are required for proper branch circuit protection for all iQpump drives. Failure
to use recommended fuses/circuit breakers (See Appendix E) may result in damage to the wiring, iQpump drive and/or
personal injury.
2. Control power is supplied internally from the main circuit DC power supply for all iQpump drives.
3. Consult your Yaskawa representative before using 12-pulse rectification.
Control
circuits
YASKAWA TM.iQp.01 iQpump Drive User Manual 37
Page 38

2.2 Wiring Main Circuit Terminals
CIMR
4024 to 4055
◆ Main Circuit Configurations 480 VAC
The 480 VAC main circuit configurations of the iQpump drive are shown in Table 2.5.
Table 2.5 iQpump Drive Main Circuit Configurations
480 VAC
CIMR-_ _ _ 40P4 to 4018
(1/2 Hp to 30 Hp)
-_ _ _
(40 Hp to 100 Hp)
Note
1
{
3
Power
supply
Control
circuits
Control
circuits
Power
supply
CIMR-_ _ _ 4075 to 4160 and CIMR-_ _ _ 4185 to 4300
(125 Hp to 500 Hp)
Notes
1 & 3
{
Note: 1. Input fuses or molded case circuit breakers are required for proper branch circuit protection for all iQpump drives. Failure
to use recommended fuses/circuit breakers (see Appendix E) may result in damage to the wiring, iQpump drive and/or
personal injury.
2. Control power is supplied internally from the main circuit DC power supply for all iQpump drives.
3. Consult your Yaskawa representative before using 12-pulse rectification.
Notes
1 & 3
{
—
Power
supply
Control
circuits
38 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 39

2.2 Wiring Main Circuit Terminals
■ Cable Length Between iQpump Drive and Motor
The iQpump should be installed as close as possible to the motor to minimize the length of load side power cable needed between the
iQpump drive and the motor.
If the cable between the iQpump drive and the motor is long, the high-frequency leakage current will increase, causing the iQpump drive
output current to increase as well. This may affect peripheral devices. To prevent this, reduce the cable length whenever possible, or if
necessary, adjust the carrier frequency (set in C6-02) as shown in Tab le 2. 6.
The line side power cables, load side power cables and the control wiring should all be run in a separate conduit. Careful attention to this
recommended design practice will avoid many potential motor and iQpump drive related problems.
Table 2.6 Motor Cable Length vs. Carrier Frequency (C6-02)
Motor Cable Length 328ft. (100m) maximum More than 328ft. (100m)
Carrier Frequency 10kHz maximum 5kHz maximum
(See the limitations on carrier frequency, based on iQpump drive capacity and model number in Appendix B).
Ground Wiring
■
Observe the following precautions when connecting the ground wire:
1. 208-240 VAC iQpump drives should have a ground connection with resistance of less than 100Ω.
2. 480 VAC iQpump drives should have a ground connection with resistance of less than 10Ω.
3. Do not share the ground wire with other devices, such as motors or large-current electrical equipment.
4. Always use a ground wire that complies with technical standards on electrical equipment and minimize the length of the ground wire.
Leakage current flows through the iQpump drive. Therefore, if the distance between the ground rod and the ground terminal is too
long, potential on the ground terminal of the iQpump drive will become unstable.
5. When using more than one iQpump drive, be careful not to loop the ground wire. See Figure 2.4.
OK
NO
OK
NOT OK
Figure 2.2 Ground Wiring Examples
■ Control Circuit Ground Terminals
The removable iQpump drive control terminal card provides two ground terminals (marked TB3 and TB4) to accept the control wire
shield connection. The control wire shield should be connected on this end only, the opposite end should be isolated with electrical tape.
IMPORTANT
Grounding of the iQpump enclosure and motor is required for proper system operation.
YASKAWA TM.iQp.01 iQpump Drive User Manual 39
Page 40

2.3 Control Wiring
2.3 Control Wiring
◆ Control Circuit Wire Sizes
The auto mode setpoint (speed command) field wiring connection is made to iQpump drive terminals A1 or A2 (signal positive), AC
(signal common) and G (shield). Keep this lead length as short as possible to maintain signal quality. Insulated twisted shielded pair wire
(2 conductor # 18 ga, Belden 8760 or equivalent) is required. Do not run these wires in the same conduit as other AC power or control
wires. The shield must be connected on this end only, stub and isolate the other end. The A2 signal employed is 4 to 20 mA with
parameter H3-08 set for “2: 4 - 20 mA.” For 0 to 10 Vdc, parameter H3-08 is set for “0: 0 - 10 Vdc” and the iQpump control board DIP
switch S1-2 must be in the OFF position. (See Figure 2.4).
For remote operation, keep the length of the control wiring to 50m or less. Separate the control wiring from high-power lines (input
power, motor leads or relay sequence circuits) to reduce noise induction from peripheral devices.
When setting speed commands (frequency references) from an external speed potentiometer (and not from the Digital Operator), use
shielded twisted-pair wires and ground the shield to terminal E(G), as shown in Figure 2.3. Terminal numbers and wire sizes are shown
in Table 2.7.
iQpump
E (G)
E(G )
E7
+V +15 Vdc, 20 mA
External
External
Frequency
Frequency
Reference
Reference
2k
2k
4 to 20m A
4 to 20m A
Ω
2k
2kΩ
PP
P P
+V +15V D C, 20m A
A1 0-10 Vdc (20k Ω)
A 1 0-10V D C (20K )
A2 H3-08
A 2 H 3-08
4 - 2 0 m A (2 5 0 K )
4-20m A (250K Ω)
[0 to + 1 0 V (2 0 K )]
[0 to +10V (20K Ω)]
AC
AC
Ω
Ω
Ω
(P = Pair)
Figure 2.3 Analog Input Terminal Configuration
Table 2.7 Terminal Numbers and Wire Sizes (Same for all iQpump Drives)
Tightening
Term inals
S1, S2, S3, S4, S5, S6, S7
SN, SC, SP, +V, A1, A2, AC, MI,
M2, M3, M4, MA, MB, MC, FM,
AC, AM, R+, R-, S+, S-, IG
E(G) M3.5
*1.Use shielded twisted-pair cables to input an external speed command.
*2.Yaskawa recommends using straight solderless terminals on digital inputs to simplify wiring and improve reliability.
*3. Yaskawa recommends using a thin-slot screwdriver with a 3.5 mm blade width.
Ter min al
Screws
Phoenix
*3
type
Tor que
lb-in
(N•m)
4.2 to 5.3
(0.5 to 0.6)
7.0 to 8.8
(0.8 to 1.0)
Possible Wire
Sizes
26 to 16
20 to 14
2
)
*2
)
AWG (m m
Stranded wire:
(0.14 to 1.5)
(0.5 to 2
Recommended Wire
Size AWG (mm
18
(0.75)
12
(1.25)
Signal Terminal Connections
0-10 Vdc A1 to AC
4-20 mA
or
0-10 Vdc
2
)
• Shielded, twisted-pair wire
• Shielded, polyethylene-covered, vinyl sheath
cable
A2 to AC
Wire Type
*1
40 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 41

2.3 Control Wiring
■ Wiring Checks
After all wiring is completed, perform the following checks:
1. Is all wiring correct?
2. Have all wire clippings, screws or other foreign material been removed from the iQpump drive enclosure?
3. Are all terminal screws tight?
◆ Control Circuit Terminal Functions
The factory default functions of the control circuit terminals for 2-wire control are shown in Ta bl e 2. 8.
Table 2.8 Control Circuit Terminals
Typ e No. Signal Name Description Signal Level
S1 Forward run/stop command Forward run when CLOSED; stopped when OPEN.
S2 Not used. Not used.
S3 External fault input Fault when CLOSED.
Digital
input
signals
Analog
input
signals
Digital output
signals
Analog
output signals
RS-485/
422
S4 Fault reset Reset when CLOSED
S5 Multi-step SP1
S6 Hand Mode Hand Mode when CLOSED.
S7 Pre-Charge
SN
Digital input common Refer to Table 2.10 for connection details.SC
SP
+V +15Vdc power supply +15Vdc power supply for analog inputs or transmitters
A1
A2
AC Analog common — —
E(G)
M1
M2
M3
M4
MA
MB
MC
FM Multi-function analog output
AC Analog common —
AM Multi-function analog output
R+
R-
S+
S-
IG Signal common — —
Analog input or
Speed Command
Multi-function analog input
(PI Feedback)
Shield wire, optional ground line
connection point
Pump 2 Control
(N.O. contact)
Pump 3 Control
(N.O. contact)
Fault output signal
(SPDT)
Modbus
communication input
Modbus
communication output
Multi-step SP1 frequency reference when
CLOSED.
Pre-Charge function disabled when
CLOSED.
0 to +10Vdc/100% 0 to +10 V(20 kΩ)
4 to 20 mA/100%
0 to +10Vdc/100% (H3-0
——
CLOSED during operation
CLOSED when local control
MA/MC: CLOSED during fault condition
MB/MC: OPEN during fault condition
(output frequency)
0 to +10Vdc/100% frequency
(output current)
0 to +10Vdc/100% Drive's rated output
current
For 2-wire RS-485, jumper R+ and S+ and
jumper R- and S-.
Multi-function digital
inputs
Functions set by H1-01
to H1-05.
Function set by H3-09.
Multi-function digital
output
Function set by H2-01.
Multi-function digital
output
Function set by H2-02.
Multi-function analog
monitor 1
Function set by H4-01
Multi-function analog
monitor 2
Function set by H4-04
24 Vdc, 8 mA
Photocoupler isolation
(Max. current: 20 mA)
4 to 20 mA(250Ω)
0 to +10 V(20kΩ)
Dry contacts
Contact capacity:
1 A max. at 250Vac
1 A max. at 30Vdc
Dry contacts
Contact capacity:
1 A max. at 250Vac
1 A max. at 30Vdc
0 to +10Vdc max. ±5%
2 mA max.
Differential input,
PHC isolation
Differential input,
PHC isolation
+15Vdc
YASKAWA TM.iQp.01 iQpump Drive User Manual 41
Page 42

2.3 Control Wiring
◆ DIP Switch S1
DIP Switch S1 is described in this section. The functions of DIP switch S1 are shown in Ta bl e 2 .9 .
S1
1
1
2
DIP Switch S1 located on
Terminating
resistance
terminal board.
Figure 2.4 DIP Switch S1 Location
Table 2.9 DIP Switch S1
Name Function Setting
S1-1 RS-485 and RS-422 terminating resistance
S1-2 Input method for analog input A2
OFF: No terminating resistance (factory default)
ON: Terminating resistance of 110Ω
OFF: 0-10 Vdc (internal resistance: 20KΩ)
ON: 4-20mA (internal resistance: 250Ω) (factory default)
42 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 43

2.3 Control Wiring
◆ Shunt Connector CN15
The shunt connector CN15 is described in this section. Shunt connector along with parameters H4-07 and H4-08 select the signal range
of the analog output terminals FM and AM.
Shunt connector CN15 is only available when the optional Terminal Card with the 4-20mA Analog Output Monitor is installed (Model
No. ETC618120). See Chapter 7 Maintenance, for installation of the optional Terminal Card.
The function of various shunt connector CN15 configurations is shown in Table 2.10.
Figure 2.5 Shunt Connector CN15 Location
Table 2.10 Shunt Connector CN15 Configuration Options
CN15 Analog Output Monitor Configurations
Voltage Output (0-10 Vdc) for terminals FM-AC (CH1) and AM-AC (CH2)
Current Output (4-20mA) for terminals FM-AC (CH1) and AM-AC (CH2)
Voltage Output (0-10 Vdc) for terminals FM-AC (CH1)
Current Output (4-20mA) for terminals AM-AC (CH2)
Current Output (4-20mA) for terminals FM-AC (CH1)
Voltage Output (0-10 Vdc) for terminals AM-AC (CH2)
The software configuration for the analog output monitor signal type is listed below:
Parameter
No.
H4-07 0423H
H4-08 0424H
Modbus
Address
Parameter Name
Digital Operator
Display
Terminal FM Signal Level
Selection
AO Level Select1
Terminal AM Signal Level
Selection
AO Level Select2
Description
0: 0 - 10 Vdc
2: 4-20 mA*
0: 0 - 10 Vdc
2: 4-20 mA*
* An analog output of 4 - 20 mA cannot be used with the standard terminal
board. Therefore an optional terminal board (with shunt connector CN15)
is needed.
Setting
Range
0 or 2 0 Programming
0 or 2 0 Programming
Factory
Setting
Menu
Location
YASKAWA TM.iQp.01 iQpump Drive User Manual 43
Page 44

2.3 Control Wiring
◆ Sinking/Sourcing Mode
The input terminal logic can be switched between sinking mode (0V common) and sourcing mode (+24V common) by using the
terminals SN, SC, and SP. An external power supply can also be connected, providing more freedom in signal input methods.
Table 2.11 Sinking/Sourcing Mode and Input Signals
Internal Power Supply – Sinking Mode
(Factory Default)
Internal Power Supply – Sourcing Mode
External Power Supply – Sinking Mode
External +24V
External Power Supply – Sourcing Mode
External +24V
44 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 45

◆ Control Circuit Terminal Connections
■ iQpump Factory Default
Connections to iQpump drive terminals for the default factory settings are shown in Figure 2.6.
P
24
P
P
P
2.3 Control Wiring
Pump Motor
Digital Inputs
24VDC, 8mA
Multi-function
Digital Inputs
24VDC, 8 mA
RUN
NOT USED
EXT. PUMP FAULT
FAULT RESET
MULTI SP 1
HAND MODE
DISABLE PRE-CHG
Feedback Device
4-20mA
2 Wire Connection
Supply
Output
Feedback Device
(e.g Pressure Transducer)
iQPump
S1
S2
S3 (H1-01)
S4 (H1-02)
S5 (H1-03)
S6 (H1-04)
S7 (H1-05)
SN
SC
SP 24VDC +/-20%, 8mA
E(G)
+V +15VDC +/-10%, 20mA
A1 0 to +10VDC, 20 kWΩ*
A2 4 to 20mA, 250WΩ*
[0 to +/-10VDC, 20kWΩ**]
Multi-function Analog Input 1 (H3-09)
AC
PUMP 2 CONTROL
PUMP 3 CONTROL
M
Multi-function
Digital Outputs
250VAC, 30VDC, 1A
Multi-function
Analog Outputs
0 to +10 VDC, 2 mA
4-20 mA, 500
Ω
Figure 2.6 Default Terminal Connections
YASKAWA TM.iQp.01 iQpump Drive User Manual 45
Page 46

2.3 Control Wiring
◆ Control Circuit Wiring Precautions
Observe the following precautions when wiring control circuits:
1. Separate control wiring from power/motor wiring (terminals R/L1, S/L2, T/L3, U/T1, V/T2, W/T3, , 1, 2, and 3) and other
high-power lines.
2. Separate wiring for control circuit terminals MA, MB, MC, M1, M2, M3, and M4 (digital outputs) from wiring to other control circuit
terminals.
3. If using an optional external power supply, ensure it is a UL Listed Class 2 power supply source.
4. Use twisted-pair or shielded twisted-pair cables for control circuits to prevent operating faults. Prepare cable ends as shown in
Figure 2.7.
5. Connect the shield wire to terminal E(G).
6. Insulate the shield with tape to prevent contact with other signal lines and equipment.
Shield sheath
Connect to shield sheath
terminal E(G) at Drive
Insulate with tape
Insulation
Do not connect here.
Figure 2.7 Preparing the Termination of Shielded Twisted-pair Cables
46 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 47

■ Duplex Pump System Wiring
Connections to the Multi-function Digital Outputs for a Duplex Pump system.
iQpump (P7U)
2.3 Control Wiring
L1 L2 L3
Multi-Function
Di gital Output s
■ Triplex Pump System Wiring
(H2-01)
(H2-02)
40: Pump 2 Cont rol
M1
M2
M3
M4
E(G)
K1: Motor
Rated Contactor
K1
120 VAC /
24VDC
Supply Voltage
depends on
contactor coil
used
S3 SC
External Pum p Fault
Normally Closed
H1-01 = 25
Figure 2.8 Duplex Pump System Wiring
T1T2T3
Motor Overload
(opti onal )
Pump
Motor
Connections to the Multi-function Digital Outputs for a Triplex Pump system.
iQpump (P7U)
K1, K2: Motor
Rated Contactor
K1
Multi-Function
Di gital Output s
(H2-01)
(H2-02)
M1
M2
M3
M4
40: Pump 2
Control
41: Pump 3
Control
K2
E(G)
Motor Overload
(opti onal )
120 VAC /
24VDC
Supply Voltage
depends on
contactor coil
used
S3
External Pump Fault
Normally Closed
H1-01 = 25
L1 L2 L3
K1
T1T2T3
Pump
Motor 2
L1 L2 L3
K2
T1T2T3
SC
Pump
Motor 3
Figure 2.9 Triplex Pump System Wiring
YASKAWA TM.iQp.01 iQpump Drive User Manual 47
Page 48

2.3 Control Wiring
■ Duplex Pump System with Motor Starter Wiring
Connections to the Multi-function Digital Outputs for a Duplex Pump System using Motor Starters.
iQpump (P7U)
L1 L2 L 3
Rated Contactor
K1
K1: Motor
Multi-Function
Di gital Output s
(H2-01)
(H2-02)
40: Pump 2 Cont rol
M1
M2
M3
M4
E(G)
120 VAC /
24VDC
Supply Voltage
depends on
contactor coil
used
Mot or Ov erload
(optional )
T1T2T3
S3 SC
External Pump Fault
Normally Closed
H1-01 = 25
Pump
Motor 2
Figure 2.10 Duplex Pump System with Motor Starter Wiring
■ Triplex Pump System with Motor Starters Wiring
Wiring diagram shows connections to the Multi-Function Digital Outputs for a Triplex Pump System using Motor Starters.
iQpump (P7U)
Multi-Function
Di gital Output s
(H2-01)
(H2-02)
E(G)
M1
M2
M3
M4
40: Pump 2
Control
41: P ump 3
Control
120 VAC /
24V DC
Supply Voltage
depends on
contactor coil
used
K2
K1, K2 : Motor
Rated Contactor
K1
Motor Overload
(optional)
L1 L2 L3
K1
L1 L2 L3
K2
External Pump Fault
Normally C los ed
H1-01 = 25
T1T2T3
S3
Pump
Motor 2
T1T2T3
SC
Pump
Motor 3
Figure 2.11 Triplex Pump System with Motor Starters
48 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 49

2.3 Control Wiring
■ Feedback Device (3-Wire)
Connection of a 3-Wire 0 ~ 10 Vdc Feedback Device (H3-08 = 0)
In order to use a 4 ~ 20 mA feedback device, parameter H3-08 Terminal A2 Signal has to be programmed to 2.
Note: In order to use a 0 ~ 10V feedback device parameter for terminal A2, the parameter H3-08 Terminal A2 Signal has to be
programmed to 0 and dip switch S1-2 has to be set to OFF for the iQpump to accept a 0 ~ 10 Vdc signal.
Figure 2.12 Feedback Device (3-Wire) Connection
YASKAWA TM.iQp.01 iQpump Drive User Manual 49
Page 50

2.3 Control Wiring
THIS PAGE INTENTIONALLY LEFT BLANK.
50 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 51

Digital Operator
This chapter describes the displays and functions of the Digital Operator.
3.1 Digital Operator Display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.2 Digital Operator Keys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.3 Drive Mode Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.4 Drive Main Menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.5 Pump Quick Setup Menu (-QUICK-) . . . . . . . . . . . . . . . . . . . . . . . . 60
3.6 Programming Menu (-ADV-) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.7 Example of Changing a Parameter. . . . . . . . . . . . . . . . . . . . . . . . . 63
3
YASKAWA TM.iQp.01 iQpump Drive User Manual 51
Page 52

3.1 Digital Operator Display
3.1 Digital Operator Display
The Digital Operator is used for programming, operating, and monitoring iQpump drive operation. By default, the iQ Pump Drive will
not run unless the digital operator is securely attached to the iQpump drive.
The various items included on the Digital Operator are described below.
Menu Display
See Table 3.7
Drive Mode Indicators
See Table 3.2
Ready Display
Drive can operate when a drive command is input
Displays monitor data, parameter numbers and settings
Data Display
1 line x 13 characters
3 lines x 16 characters
Key Descriptions
See Table 3.1
RUN & STOP Indicators
See Tables 3.5 and 3.6
Figure 3.1 Digital Operator Component Names and Functions
WARNING
The digital operator can be used to operate (start) the iQpump drive. Incorrect programming and/or improper key
selection on the digital operator may result in the iQpump drive starting unexpectedly. Prior to making any adjustments
with the digital operator, insure that all personnel are clear from the iQpump drive, motor, and machine. Also, insure that
all covers, couplings, pulleys, shaft keys, etc. are secure.
52 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 53

3.2 Digital Operator Keys
The names and functions of the Digital Operator Keys are described in Ta bl e 3 .1 .
Table 3.1 Digital Operator Keys
Key Name Function
• Pressing the AUTO key will put the Drive in the “Auto” mode.
• In the “Auto” mode, the Drive will be capable of starting/stopping depending on the setting of parameter
“b1-02” (Run Command Selection).
• In the “Auto” mode, the Drive setpoint will depend on the setting of parameter “b1-01” (Reference Source).
AUTO Key
MENU Key Scrolls through the five main menus.
ESCAPE Key Returns to the previous display, before the DATA/ENTER key was pressed.
• If the OFF key is pressed, the “Auto” mode frequency reference will continue to be displayed on the keypad.
• Pressing the AUTO key will start the Drive if the run command is already closed.
• If the Drive is running in the “Auto” mode and the OFF key is pressed, the Drive will stop. If the run command
remains closed, pressing the AUTO key will restart the Drive.
• While the Drive is running, the run command can be opened to stop and closed to restart without taking the
Drive out of the “Auto” mode.
3.2 Digital Operator Keys
MONITOR Key
INCREASE Key
DECREASE Key
SHIFT/RESET Key
DATA/ENTER Key Pressed to enter menus and parameters as well as to set values.
HAND Key
Selects the monitor mode from the Operation (-DRIVE-), Quick Setting (-QUICK-), Programming (-ADV-) and
Modified Constants (-VERIFY-) menus + A.TUNE.
Increases parameter numbers and set values.
Used to move to the next item or data value.
Decreases parameter numbers and set values.
Used to move to the previous item or data value.
Selects the digit to be changed. The selected digit will blink.
Also resets the Drive when a fault has occurred, if the fault condition doesn’t exist anymore and there isn’t an
active RUN command.
• Pressing the HAND key will put the Drive in the “Hand” mode and start the Drive.
• In the “Hand” mode, the drive speed command will depend on the setting of parameter “p5-01” (Hand Mode
Source and p5-02 Hand Reference).
• If the OFF key is pressed, the “Hand” mode speed command will continue to be displayed on the keypad.
OFF Key Stops Drive operation, following the stopping method as programmed in parameter b1-03.
YASKAWA TM.iQp.01 iQpump Drive User Manual 53
Page 54

3.3 Drive Mode Indicators
3.3 Drive Mode Indicators
The definitions of the iQpump drive mode indicators are shown in Ta bl e 3 .2 .
Table 3.2 iQpump Drive Mode Indicators
Indicator Definition
FWD Lit when a forward run command is input and when Drive is in “Hand” Mode.
AUTO SEQ Lit when set up for remote run command. See
AUTO REF Lit when set up for remote speed command. See
ALARM Lit when a fault has occurred. Flashes when an alarm has occurred.
◆ AUTO Sequence (SEQ) Indicator
The status of the AUTO “Sequence” (SEQ) indicator is shown in Table 3.3. This indicator is always “Off” when the iQpump drive is in
the “Hand” mode. When the iQpump drive is in the “Auto” mode, the SEQ indicator status is dependent on the setting of parameter
“b1-02” (Run Command Selection).
Table 3.3 AUTO Sequence (SEQ) Indicator
Indicator Status Hand Mode Auto Mode
Parameter “b1-02” (Run Command Selection) is set to terminal strip, communications, or
an option board as indicated below:
On
N/A
Off
b1-02 = 1 (Terminals)
Parameter “b1-02” (Run Command Selection) is set to digital operator as indicated below:
b1-02 = 0 (Operator)
Ta bl e 3 .3 .
Table 3.4.
= 2 (Communications)
= 3 (Option PCB)
The status of the AUTO “Reference” (REF) indicator is shown in Tabl e 3 .4 . This indicator is always “Off” when the iQpump drive is in
the “Hand” mode. When the iQpump drive is in the “Auto” mode, the REF indicator status is dependent on the setting of parameter
“b1-01” (Frequency Reference Selection).
Table 3.4 AUTO Reference (REF) Indicator
Indicator Status Hand Mode Auto Mode
Parameter “b1-01” (Frequency Reference Selection) is set to terminal strip,
communications, or an option board as indicated below:
On
N/A
Off
b1-01 = 1 (Terminals)
= 2 (Communications)
= 3 (Option PCB)
Parameter “b1-01” (Frequency Reference Selection) is set to digital operator as indicated
below:
b1-01 = 0 (Operator)
◆ Run Indicator
The status of the “RUN” indicator is shown in Table 3.5 when the iQpump drive is in either the “Hand” or “Auto” mode.
Table 3.5 RUN Indicator
Indicator Status Condition
On Drive is running
Blinking Drive is decelerating to a stop
Off Drive is stopped
54 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 55

3.4 Drive Main Menu
◆ Stop Indicator
The status of the “STOP” indicator is shown in Tab le 3 .6 when the iQpump drive is in either the “Hand” or “Auto” mode.
Table 3.6 STOP Indicator
Indicator Status Condition
On Drive is decelerating to a stop or stopped
Blinking Drive is in a run condition but the frequency reference is zero or Drive is running in “Auto” mode and OFF has been pressed
Off Drive is running
3.4 Drive Main Menu
The iQpump drive’s parameters and monitoring functions are organized into menu groups that make it easier to read and set parameters.
The iQpump drive is equipped with five menu selections. The five selections and their primary functions are shown in Ta bl e 3 .7 and are
directly available by pressing the MENU key.
Table 3.7 iQpump Drive Menu Selections
Main Menu Primary Function(s)
Operation
- DRIVE -
Pump Quick Setup
- QUICK -
Programming
- ADV -
Modified Constants
- VERIFY -
Auto-Tuning
- A.TUNE -
The Drive can be run in this menu.
Use this menu for monitoring values such as frequency reference or output current, displaying fault history or displaying the
fault traces.
The Drive can be programmed in this menu.
Use this menu to set/read the most commonly used parameters.
The Drive can be programmed in this menu.
Use this menu to set/read every parameter.
The Drive can be programmed in this menu.
Use this menu to set/read the parameters that have been modified from their factory default settings.
The Drive can be programmed in this menu.
Use this menu to auto-tune the Drive in order to optimize motor control as well as utilize the bi-directional speed search feature.
YASKAWA TM.iQp.01 iQpump Drive User Manual 55
Page 56

3.4 Drive Main Menu
◆ Pump Quick Setup Main Menu Structure
The menu selection display will appear when the MENU key is pressed from a monitor or setting display. While viewing the menu
selection display, press the MENU key repeatedly to scroll between the menu selections.
Operation
-QUICK-
Pump Quick Setup
-ADV-
Figure 3.2 Main Menu Structure
Press the DATA/ENTER key to enter the desired menu selection.
1
Modified Consts = Modified Parameters
Programming
-VERIFY-
Modified Consts
-A.TU NE-
Auto-Tuning
1
56 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 57

3.4 Drive Main Menu
-
◆ Operation Menu (-DRIVE-)
This menu is used for setting a speed command or monitoring values such as output frequency and output current. It is also used for
displaying the fault history and the fault traces. The iQpump drive must be in this menu in order to run, see parameter b1-08.
• Leaving the iQpump drive in a menu other than the Operation Menu, will prohibit the iQpump drive
from running. While running, if the iQpump drive is in a menu other than “Operation” and the run com-
IMPORTANT
■ U1 Monitor List
Follow the key operations below (Figure 3.3) to access the Operation Menu:
mand is removed and re-applied, the iQpump drive will stop and will not start until the Operation Menu is
selected unless b1-08 = 1.
x1
-DRIVE-
** Main Menu **
- - - - - - - - - - - - - Operati on
-DRIVE-
-DRIVE- Rdy
Auto Setpoint Ref
Frequency Ref
U1- 0.00PSI
01 =
U1-01= 0.00Hz
- - - - - - - - - - - - - - - - - - - -
U1-02=
U1-02= 0.00Hz
U1-91=
U1
03= 0.00A
Rdy
60.00Hz
0.00PSI
Figure 3.3 U1 Monitor List Access Procedure
Use and keys to scroll through the U1 Monitor Parameter List. See Appendix A for functional description.
Table 3.8 U1 Monitor Parameter List
Monitor
U1-01
U1-02
U1-03
U1-06
U1-07
U1-08
U1-10
U1-11
U1-12
U1-13
U1-14
U1-15
U1-16
U1-18
U1-20
Parameter Name
Digital Operator Display
Auto Setpoint Reference
Auto: Setpoint
Output Frequency
Output Freq
Output Current
Output Current
Output Voltage
Output Voltage
DC Bus Voltage
DC Bus Voltage
Output Power
Output kWatts
Input Terminal Status
Input Term Sts
Output Terminal Status
Output Term Sts
Drive Operation Status
Int Ctl Sts 1
Cumulative Operation Time
Elapsed Time
Software Number
FLASH ID
Terminal A1 Input Voltage
Term A 1 L e v e l
Terminal A2 Input Voltage
Term A 2 l e v e l
Motor Secondary Current (Iq)
Mot SEC Current
Output Frequency After Soft Start
SFS Output
Monitor
U1-24
U1-28
U1-29
U1-30
U1-34
U1-36
U1-37
U1-38
U1-39
U1-40
U1-90
U1-91
U1-92
U1-93
U1-94
PI Feedback Value
PI Feedback
CPU Number
CPU ID
kWh
kWh Lo 4 Digits
MWh
kWh Hi 5 Digits
First Parameter Causing an OPE
OPE Detected
PI Input
PI Input
PI Output
PI Output
PI Setpoint
PI Setpoint
Memobus Communication Error Code
Tra n s mit E r r
Heatsink Cooling Fan Operation Time
FAN E l a p sed T i m e
Pump Setpoint Reference
Pump Setpoint
Pump Feedback
Pump Feedback
Pump Status
Pump Status
Total Setpoint Compensation
Total S P C o m p .
Motor Speed
Motor Speed
Parameter Name
Digital Operator Display
YASKAWA TM.iQp.01 iQpump Drive User Manual 57
Page 58

3.4 Drive Main Menu
■ U2 Fault Trace List
After viewing the “Monitor” parameter list, in order to view the “Fault Trace” parameter list, follow the key operations below Figure 3.4.
-DRIVE-
-DRIVE- Rdy
U1-01= 0.00Hz
U1- 0.00PSI
01
- - - - - - - - - - - - - - - - - - - -
U1-02=
U1-02= 0.00Hz
U1-91=
U1-03= 0.00A
Monitor
Monitor
=
0.00Hz
0.00PSI
Rdy
-DRIVE- Rdy
Fault Trace
U2-01= None
- - - - - - - - - - - - - - - - - - - -
U2-02= None
U2-03= 0.00Hz
Figure 3.4 U2 Fault Trace List Access Procedure
Use and keys to scroll through the U2 Fault Trace Parameter List.
Table 3.9 U2 Fault Trace Parameter List
Fault Trace Parameters
U2-01 Current Fault
U2-02 Last Fault
U2-03 Frequency Ref
U2-04 Output Freq
U2-05 Output Current
U2-07 Output Voltage
U2-08 DC Bus Voltage
U2-09 Output kWatts
U2-11 Input Term Sts
U2-12 Output Term Sts
U2-13 AC Drive Status
U2-14 Elapsed Time
-DRIVE- Rdy
Current Fault
U2-01 = None
- - - - - - - - - - - - - - - - - - - -
U2-02= None
U2-03= 0.00Hz
58 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 59

3.4 Drive Main Menu
A
■ U3 Fault History List
After viewing the “Fault Trace” parameter list, in order to view the “Fault History” parameter list, follow the key operations below
(Figure 3.5.)
-DRIVE- Rdy
Fault Trace
U2-01= None
- - - - - - - - - - - - - - - - - - - -
U2-02= None
U2-03= 0.00
-DRIVE- Rdy
Fault History
U3-01= None
- - - - - - - - - - - - - - - - - - - -
U3-02= None
U3-03= None
-DRIVE- Rdy
Last Fault
U3-01 = None
- - - - - - - - - - - - - - - - - - - -
U3-02= None
U3-03= None
Figure 3.5 U3 Fault History Access Procedure
Use and keys to scroll through the U3 Fault History Parameter List.
Table 3.10 U3 Fault History Parameter List
Fault History Parameters
U3-01 Last Fault
U3-02 Fault Message 2
U3-03 Fault Message 3
U3-04 Fault Message 4
U3-05 Elapsed Time 1
U3-06 Elapsed Time 2
U3-07 Elapsed Time 3
U3-08 Elapsed Time 4
U3-09 Fault Message 5
U3-10 Fault Message 6
U3-11 Fault Message 7
U3-12 Fault Message 8
U3-13 Fault Message 9
U3-14 Fault Message 10
U3-15 Elapsed Time 5
U3-16 Elapsed Time 6
U3-17 Elapsed Time 7
U3-18 Elapsed Time 8
U3-19 Elapsed Time 9
U3-20 Elapsed Time 10
YASKAWA TM.iQp.01 iQpump Drive User Manual 59
Page 60

3.5 Pump Quick Setup Menu (-QUICK-) <0032>
3.5 Pump Quick Setup Menu (-QUICK-) <0032>
This menu is used to set/read the most commonly used parameters in the iQpump drive. Follow the key operations below (Figure 3.6) to
access the Pump Quick Setup Menu
x2
Pump Quick Setup
Figure 3.6 Pump Quick Setup Parameter Access Procedure
Use and keys to scroll through the Quick Setting Parameter List.
Table 3.11 Pump Quick Setup Parameter List
Parameter
Number
E2-01 Motor Rated Current
E2-04 Number of Motor Poles
b1-02 Run Command Selection
b1-01 Frequency Reference Selection
P1-02 System Units
P1-03 Feedback Device Scaling
b5-12 PI Feedback Ref Missing Detection Selection
b5-13 PI Feedback Loss Detection Level
b5-14 PI Feedback Loss Detection Time
P1-04 Start Level
P1-05 Start Level Delay Time
P2-01 Sleep Level Type
P2-02 Sleep Level
P2-03 Sleep Delay Time
P1-06 Minimum Pump Frequency
C1-01 Acceleration Time 1
C1-02 Deceleration Time 1
P5-01 Hand Mode Reference Source
P5-02 Hand Reference
P1-11 Pump Protection Level
P1-12 Pump Protection Time
P1-14 Prime Loss Level
P4-09 Loss of Prime Maximum Restart Time After Fault
L5-01 Number of Auto Restart Attempts
L5-03 Maximum Restart Time After Fault
P4-08 Protection Fault Auto Restart Enable
P4-07 Feedback Fault Auto Restart Enable
P1-07 Low Feedback Level
P1-08 Low Feedback Level Fault Delay Time
P1-09 High Feedback Level
P1-10 High Feedback Level Fault Delay Time
P2-10 Maximum Setpoint Compensation
P4-01 Pre-Charge Level
P4-02 Pre-Charge Frequency
P4-03 Pre-Charge Time
P4-04 Thrust Bearing Acceleration Time
P4-05 Thrust Bearing Frequency
P4-06 Thrust Bearing Deceleration Time
P4-10 Auto Mode Operator Run Power Down Storage
Parameter Name
b1-01 =
60 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 61

3.6 Programming Menu (-ADV-)
3.6 Programming Menu (-ADV-)
This menu is used to set/read every parameter in the iQpump drive. Follow the key operations below (Figure 3.7) to access the
Programming Menu.
x3
-ADV-
** Main Menu **
- - - - - - - - - - - - - Programming
-ADVInitialization
- - - - - - - - - - - - - - - - - - - -
A1-00= 0
Select Language
Figure 3.7 Programming Menu Access Procedure
Use , , and keys to scroll through the Programming Parameter Group List. For complete parameter listing see
Appendix A.
Table 3.12 Programming Parameter Group List
Parameter Group Functions
A1 Initialization
b1 Sequence
b2 DC Braking
b3 Speed Search
b4 Delay Timers
b5 PI Control
b8 Energy Saving
C1 Accel/Decel
C2 S-Curve Acc/Dec
C4 Torque Comp
C6 Carrier Freq
d1 Preset Reference
d2 Reference Limits
d3 Jump Frequencies
E1 V/F Pattern
E2 Motor Setup
F6 Com OPT Setup
H1 Digital Inputs
H2 Digital Outputs
H3 Analog Inputs
H4 Analog Outputs
H5 Serial Com Setup
L1 Motor Overload
L2 PwrLoss Ridethru
L3 Stall Prevention
L4 Ref Detection
L5 Fault Restart
L6 Torque Detection
L8 Hdwe Protection
n1 Hunting Prev
n3 High Slip
o1 Monitor Select
o2 Key Selections
o3 COPY Function
P1 Pump Basic
P2 Pump Protection
P3 Pump Multiplex
YASKAWA TM.iQp.01 iQpump Drive User Manual 61
Page 62

3.6 Programming Menu (-ADV-)
T
”
◆ Modified Constants Menu (-VERIFY-)
This menu is used to set/read the parameters that have been modified from their original factory default settings. Follow the key
operations below (Figure 3.8) to access the Modified Constants Parameter Menu.
x4
-VERIFY-
** Main Menu **
- - - - - - - - - - - - - Modified Consts
See Note 1
See Note 1
Figure 3.8 Modified Constants Menu Access Procedure
Note: If there are not any parameters that have been modified from their original factory default settings, then the display will
state “None Modified.” Otherwise, use the “increase” and “decrease” keys to scroll through the “Modified Constants”
list.
◆ Auto-Tuning Menu (-A.TUNE-)
This menu is used to auto-tune the iQpump drive in order to optimize motor control as well as utilize the bi-directional speed search
feature. Follow the key operations below (Figure 3.9) to access the Auto-Tuning Menu.
-A.TUNE-
** Main Menu **
x5
- - - - - - - - - - - - - -
Auto-Tuning
Figure 3.9 Auto-Tuning Menu Access Procedure
Use and keys to scroll through the Auto-Tuning Parameter List.
Table 3.13 Auto-Tuning Parameter List
Auto-Tuning Parameters
T1-02 Mtr Rated Power
T1-04 Rated Current
-A.TUNEMtr Rated Power
- - - - - - - - - - - - - - - - - - - -
1-02 = 0.40kW
(0.00~650.00)
“0.40kW
62 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 63

3.7 Example of Changing a Parameter
3.7 Example of Changing a Parameter
Table 3.14 provides an example of how to change parameter “C1-02” (Deceleration Time 1) from 30 seconds to 40 seconds.
Table 3.14 Changing a Parameter in the Programming Menu
Step Number Digital Operator Display Description
-DRIVE- Rdy
1 The Drive is first powered up.
2 Press the MENU key to scroll to “Operation” menu.
3 Press the MENU key to scroll to “Pump Quick Setup” menu.
4 Press the MENU key to scroll to “Programming” menu.
Auto: Set-Point Ref
U1-01 = 0.0PSI
U1-02 = 0.00Hz
U1-91 = 0.00PSI
-DRIVE-
** Main Menu **
- - - - - - - - - - - - - Operation
Pump Quick Setup
-ADV-
** Main Menu **
- - - - - - - - - - - - - Programming
-ADV-
Initialization
5 Press the DATA/ENTER key to enter “Programming” menu.
6 Press the INCREASE key until C1-01 (Accel/Decel) is displayed.
7 Press the SHIFT/RESET key to move flashing digit to the right.
8 Press the INCREASE key to display C1-02 (Decel Time 1).
9 Press the DATA/ENTER key to access setting display.
10 Press the SHIFT/RESET key to move the flashing digit to the right.
- - - - - - - - - - - - - - - - - - - -
A1-01= 0
Select Language
-ADV-
Accel/Decel
- - - - - - - - - - - - - - - - - - - -
C1-01= 1.0sec
Accel Time 1
-ADVAccel Time 1
- - - - - - - - - - - - - - - - - - - -
C1-01 = 30.0sec
(0.0~6000.0)
“30.0sec”
-ADVDecel Time 1
- - - - - - - - - - - - - - - - - - - -
C1-02 = 30.0sec
(0.0~6000.0)
“30.0sec”
-ADV-
Decel Time 1
- - - - - - - - - - - - - - - - - - - -
C1-02= 0 030.0sec
(0.0~6000.0)
“30.0sec”
-ADV-
Decel Time 1
- - - - - - - - - - - - - - - - - - - -
C1-02= 0030.0sec
(0.0~6000.0)
“30.0sec”
YASKAWA TM.iQp.01 iQpump Drive User Manual 63
Page 64

3.7 Example of Changing a Parameter
Step Number Digital Operator Display Description
-ADV-
11 Press the SHIFT/RESET key to move the flashing digit to the right.
12 Press the INCREASE key to increase the set data.
13
14 The monitor display for C1-02 returns.
16 Press the MONITOR key on the HOA keypad to enter “Operation” menu.
Decel Time 1
- - - - - - - - - - - - - - - - - - - -
C1-02= 0030.0sec
(0.0~6000.0)
“30.0sec”
-ADVDecel Time 1
- - - - - - - - - - - - - - - - - - - -
C1-02= 0040.0sec
(0.0~6000.0)
“30.0sec”
-ADV-
Entry Accepted
-ADVDecel Time 1
- - - - - - - - - - - - - - - - - - - -
C1-02 = 30.0sec
-DRIVE- Rdy
U1-01 = 0.0PSI
40.0 sec
(0.0~6000.0)
“30.0sec”
Auto: Set-Point Ref
U1-02 = 0.00Hz
U1-91 = 0.00PSI
Press the DATA/ENTER key to enter the set data. “Entry Accepted” is
displayed for 1.0 sec after the data setting has been confirmed.
64 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 65

4
Start Up
This chapter describes the procedures to prepare the iQpump drive for start up and the procedures
to conduct an iQpump drive start up.
4.1 Start Up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.2 iQpump Drive Start Up Procedures . . . . . . . . . . . . . . . . . . . . . . . . 69
4.3 Pump System Start/Stop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.4 Pump Basics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.5 Use Feedback Level to Start iQpump Controller . . . . . . . . . . . . . 77
4.6 Low Feedback Level Alarm and Fault Setup. . . . . . . . . . . . . . . . . 79
4.7 High Feedback Level Alarm and Fault Setup . . . . . . . . . . . . . . . . 81
4.8 Feedback Loss Detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.9 Basic Pump Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
YASKAWA TM.iQp.01 iQpump Drive User Manual 65
Page 66

4.1 Start Up
4.1 Start Up
In order to provide the most reliable iQpump drive available and to avoid any extra costs related to loss or reduction of warranty
coverage, an authorized Yaskawa service representative should complete this start up procedure. Please complete the following checklist
and maintain it in a secure location as technical service personnel may request information from this checklist.
◆ Drive Start Up Preparation
Date:____________________________________________
Start Up Person:
Company Name:_________________________________ Start Up Location: _________________________________
Sales Order #: ___________________________________ Serial #: _________________________________________
Printed Name: ___________________________________ Drive Location: ___________________________________
Phone #: _______________________________________ Signature: _______________________________________
Owners Representative:
Printed Name: ___________________________________ Phone #: _________________________________________
Company: ______________________________________ Signature: ________________________________________
Step
1. The iQpump drive is thoroughly tested at the factory. The start up person should verify that the iQpump drive is free of shipping
and installation damage. Shipping damage is not covered by the Yaskawa warranty. Claims must be filed with the shipping
company as soon as possible for any potential recovery via insurance.
2. Review the iQpump (P7U) User Manual (TM.iQp.01) shipped with the iQpump drive.
3. Verify that the model number and voltage ratings in the purchase order match the nameplate data for each unit.
4. Location of the iQpump drive is important to achieve proper performance and normal operating life. The unit should be installed
in an area where it is protected from:
Direct sunlight, rain or moisture
Corrosive gases or liquids
Vibration, airborne dust or metallic particles
5. Ensure the iQpump drive is on a vertical surface with adequate space for air circulation (4.75” above and below, 1.2” on each
side). Refer to Figure 1.5.
6. Verify that the proper branch circuit protection is installed in front of the iQpump drive. Refer to Appendix E Peripheral
Devices for proper input fuse or circuit breaker sizing.
7. Avoid running input and output wiring in the same conduit.
8. Avoid routing power wiring near equipment sensitive to electrical noise.
66 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 67

4.1 Start Up
9. Never allow wire leads to touch metal surfaces. Short-circuit may result.
10. Never connect AC main power output terminals U/T1, U/T2 and W/T3.
11. Never connect power factor correction capacitors or noise filters to the iQpump drive output.
12. Use 600 Vac vinyl-sheathed wire or equivalent. Wire size should be determined considering voltage drop of leads.
Line voltage drop (V) =
x wire resistance (Ω/km) x wire length (m) x current (A) x 10
3
-3
13. It is recommended that the motor lead length not exceed 164 feet (50 meters) and motor wiring be run in a separate conduit from
the power wiring. If lead length must exceed this distance, reduce the carrier frequency (see Figure 2.6) and consult Yaskawa
toll free at 1-800-YASKAWA (927-5292) for other motor protection measures.
14. Signal and control leads must be separated from main circuit leads (R/L1, S/L2, T/L3, U/T1, V/T2, W/T3).
15. Determine proper wire size for power and motor leads. Refer to Table 2.1 and Table 2 . 2 for details.
16. Review proper ground connections for the iQpump drive. Refer to Chapter 2 for details. The iQpump drive must be solidly
grounded using the main circuit ground terminal. Ground resistance should be less than 100Ω for a 208-240 Vac iQpump drive.
Ground resistance should be less than 10Ω for a 480 Vac iQpump drive. Select wire size suitable for the size of terminal screw.
Make the length as short as possible.
Never ground the iQpump drive in common with welding machines, motors or other large-current electrical equipment.
Where several iQpump drives are used, ground each iQpump drive directly or daisy-chain to the ground pole(s).
DO NOT FORM A LOOP WITH THE GROUND LEADS. See Table 2.4.
17. Review terminal functions of signal and control circuits. Refer to Table 2.8.
18. Verify if any customer safety devices are required (e.g. External Pump Fault).
19. Record the following motor nameplate information:
Voltage: _____________________Motor Rated Amps: ____________________
20. Verify that the commercial power supply is within the rated iQpump drive input voltage:
Power Supply: ____________________VAC Drive Input Voltage: ____________________VAC
21. Verify that the leads in the 3-Phase electric motor conduit box are configured for the proper voltage.
22. Ensure Motor Rated Current is less than or equal to iQpump drive Output Amps. If multiple motors are being used, make sure
that the Motor Rated Current sum is less than or equal to iQpump drive Output Amp rating. Please note that if multiple motors
are being operated from one iQpump drive, each motor must have its own overload and short circuit protection.
23. Wire all necessary power leads to the iQpump drive. DO NOT CONNECT MOTOR TO iQpump DRIVE YET.
24. Wire all necessary ground wires to the iQpump drive.
YASKAWA TM.iQp.01 iQpump Drive User Manual 67
Page 68

4.1 Start Up
25. Wire all necessary control wires to the iQpump drive.
26. Ensure that the power leads are connected to the R/L1, S/L2 and T/L3 terminals in the iQpump drive.
27. Tighten all of the three-phase power and ground connections. Please check that all control and signal terminations are tight.
28. Inspect the control circuit connections (including the shield) and determine if a motor “safety circuit” is connected.
If normally closed, these contacts may be wired in series with the RUN command contacts, which are between terminals S1 and
SN of the iQpump drive. No special programming is required. Refer to Chapter 2.
Alternately, these contacts could be wired between terminals S3 and SN as External Fault Inputs, and may be either normally
closed or normally open contacts.
29. Record any other connections to the iQpump drive using the blank terminal connection drawing in Chapter 2 – Electrical
Installation (Fig. 2.9) to determine if special programming is required for the following:
Multi-function Inputs – refer to Appendix A.
Multi-function Outputs – refer to Appendix A.
Multi-function Digital Inputs – refer to Appendix A.
Multi-function Analog Outputs – refer to Appendix A.
Serial Communications – refer to Appendix A.
THIS COMPLETES THE iQpump DRIVE START UP PREPARATION.
68 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 69

4.2 iQpump Drive Start Up Procedures
4.2 iQpump Drive Start Up Procedures
1. Confirm that all three phases are present and that the input voltage is correct for the iQpump drive being set up.
Measure the voltage on the line side of the iQpump drive’s Molded Case Circuit Breaker/disconnect and record below.
Table 4 . 1
Measurement Location Voltage (Vac)
L1 – L2
L2 – L3
L1 – L3
WARNING
Use extreme caution when performing measurements as contact with live parts may result in personal injury or death.
2. If voltage level is within iQpump drive Specification (See Appendix C), APPLY POWER to energize the iQpump drive. The
STOP, AUTO SEQ and AUTO REF indicators should be on.
3. REMOVE POWER from the iQpump drive. Wait for the Red CHARGE LED (near the power terminals) to go out.
WARNING
The internal capacitor remains charged even after the power supply is turned off. The status indicator LED’s and the
digital operator display will be extinguished when the DC bus voltage is below 50VDC. To prevent electric shock, wait
at least 5 minutes after all indicators are off and measure the DC Bus voltage level to confirm a safe level prior to
working on the iQpump drive.
4. Connect the motor leads to the iQpump drive at terminals U/T1, V/T2 and W/T3.
5. APPLY POWER to the iQpump drive.
6. Press the HAND key once. This puts the iQpump drive in the Hand Mode, allowing run/stop and speed commands (frequency
references) by the digital operator. The AUTO SEQ and AUTO REF indicators turn off. The FWD light turns on. The RUN
light turns on. The STOP light is blinking. “Hand Reference” (U1-01) is now displayed on the Digital Operator.
7. Press the OFF key.
8. Press the MENU key two times. Press the DATA/ENTER key once to enter the Pump Quick Setup Menu. Press the S key to
display parameter E1-01 “Input Voltage.” This parameter selects the nominal input voltage the iQpump drive will receive. To set
this parameter for the application. Press the DATA/ENTER key once. Use the
S,T, and X keys and the DATA/ENTER key to
set this parameter per the application.
Table 4.2 Input Voltage Setting
Parameter
No.
Address
E1-01 0300H
Modbus
Parameter Name
Digital Operator
Display
Input Voltage Setting
Input Voltage
Description Setting Range
Set to the nominal voltage of the incoming line.
155 to 255.0 (240 V)
310 to 510.0 (480 V)
Factory
Setting
240 V
480 V
Menu
Location
Pump Quick
Setup
Page
No.
105
Ensure the DATA/ENTER key is pressed to enter the selection in the iQpump drive. “Entry Accepted” briefly appears and the
display is now no longer flashing.
9. Press the S key once to display E2-01 “Motor Rated FLA.”
This parameter is the foundation of motor protection. It can be entered when auto-tuning is performed. Set this parameter
according to the motor rated current (FLA). Press the DATA/ENTER key once. Use the S,T, and X keys to adjust E2-01 to
the motor rated full load amps.
YASKAWA TM.iQp.01 iQpump Drive User Manual 69
Page 70

4.2 iQpump Drive Start Up Procedures
Table 4.3 Motor Rated Current
Parameter
No.
Address
E2-01 030EH
Modbus
Parameter Name
Digital Operator
Display
Motor Rated Current
Motor Rated FLA
Description Setting Range
Set to the motor nameplate full load amps.
10% to 200%
of Drive Rated Current
Factory
Setting
kVA
Dependent
Menu
Location
Pump Quick
Setup
Page
No.
108
Ensure the DATA/ENTER key is pressed to enter the value in the iQpump drive. “Entry Accepted” briefly appears and your dis-
play is now flashing.
10. Press the ESC once. Press DATA/ENTER once. Press S key once to display b1-02 “Run Source.” This parameter selects where
the iQpump drive will receive the run command. Press the DATA/ENTER key once. Use the
S or T keys and the DATA/
ENTER key to set this parameter for the application.
Table 4.4 Run Command Selections
Parameter
No.
b1-02 0181H
Modbus
Address
Parameter Name
Digital Operator
Display
Run Command Selection
Run Source
Description Setting Range
Selects the run command input source.
0: Operator - “Hand” and “Off” keys on digital operator
1: Terminals - Contact Closure on Terminal S1
2: Serial Com - RS-485 terminals R+, R-, S+ and S3: Option PCB - Option board connected at 2CN
Factory
Setting
0 to 3 0
Menu
Location
Pump Quick
Setup
Page
No.
92
Ensure the DATA/ENTER key is pressed to enter the selection in the iQpump drive. “Entry Accepted” briefly appears and the
display is now not flashing.
11. Press the
T key once to display b1-01 “Reference Source.” This parameter selects where the iQpump drive will receive the set-
point. Press the DATA/ENTER key once. Use the S or T keys and the DATA/ENTER key to set this parameter for the appli-
cation.
Table 4.5 Speed Command Selection
Parameter
No.
b1-01 0180H
Modbus
Address
Parameter Name
Digital Operator
Display
Frequency Reference
Selection
Reference Source
Description Setting Range
Selects the speed command (frequency reference) input
source.
0: Operator - Digital preset speed d1-01
1: Terminals - Analog Input Terminal A1 (or Terminal
A2 see parameter H3-13)
2: Serial Com - RS-485 terminals R+, R-, S+ and S3: Option PCB - Option board connected at 2CN
Ensure the DATA/ENTER key is pressed to enter the selection in the iQpump drive. “Entry Accepted” briefly appears and the
display is now not flashing.
12. Press the S key twice to display b1-03 “Stopping Method.”
This parameter selects the stopping method used when a stop command is given to the iQpump drive.
Table 4.6 Stopping Method Selection
Parameter
No.
b1-03 0182H
Modbus
Address
Parameter Name
Digital Operator
Display
Stopping Method
Selection
Stopping Method
Description Setting Range
Selects the stopping method when the run command is
removed.
0: Ramp to Stop
1: Coast to Stop
2: DC Injection to Stop
3: Coast w/Timer (A new run command is ignored if
input before the time in C1-02 expires.)
Factory
Setting
0 to 3 0
Factory
Setting
0 to 3 0
Menu
Location
Pump Quick
Setup
Menu
Location
Pump Quick
Setup
Page
No.
89
Page
No.
94
Press the DATA/ENTER key once. Use the S or T keys to select the stopping method. Ensure the DATA/ENTER key is
pressed to enter the selection in the iQpump drive. “Entry Accepted” briefly appears and the display is not flashing.
70 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 71

4.2 iQpump Drive Start Up Procedures
13. Press the MENU key once to display “Operation.”
14. Press the DATA/ENTER key once to display Auto: Set-Point.
15. The STOP and FWD lights are on.
16. Press the DATA/ENTER key once to enable entering of an Auto Mode Set-Point in U1-01. Use the S and T keys to set a set-
point of 10 PSI.
17. Press the AUTO key once to start the motor and verify correct motor rotation for the application. The RUN light turns on and
the STOP light turns off.
If the direction of motor rotation is wrong, press the OFF key. The RUN light turns off and the STOP light turns on. REMOVE
POWER from the iQpump drive. Wait for the Red CHARGE LED (near the power terminals) to go out. When it does, swap the
motor wires connected to terminals U/T1 & V/T2 in the iQpump drive. Be sure to re-tighten the terminal lugs. APPLY
POWER.
To verify the motor rotation is now correct for the application, press the AUTO key once to start the motor and turn off the
AUTO SEQ and AUTO REF lights. The FWD light turns on and the motor will rotate in the proper direction.
18. Press the MONITOR key to display the U1 monitors. Use the S and T keys to view Output Current (U1-03), Output Voltage
(U1-06), and DC Bus Voltage (U1-07) while running the iQpump drive throughout its entire speed range. Record the following
information at each speed:
Table 4 . 7
Hand Reference
(Hz)
Monitor U1-01
6.0
10.0
15.0
20.0
25.0
30.0
35.0
40.0
45.0
50.0
55.0
60.0
Output Current
(A)
Monitor U1-03
Output Voltage
(VAC)
Monitor U1-06
DC Bus Voltage
(VDC)
Monitor U1-07
When this table is complete, press the OFF key. The iQpump drive will stop and the FWD light remains on. This step provides
benchmark data for the application from the initial start up.
19. Press the MENU key once to display “Operation.” Press the DATA/ENTER key to display “Hand Reference.”
If using a remote speed command, press the AUTO key so the AUTO SEQ and AUTO REF indicators are on. This puts the
iQpump drive in Auto mode.
THIS COMPLETES THE iQpump DRIVE START UP PROCEDURE.
YASKAWA TM.iQp.01 iQpump Drive User Manual 71
Page 72

4.2 iQpump Drive Start Up Procedures
NOTES:
72 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 73

4.3 Pump System Start/Stop
◆ Pump Mode
4.3 Pump System Start/Stop
Table 4.8 Pump Mode
Parameter
No.
P1-01 0600H
Modbus
Address
Parameter Name
Digital Operator
Display
Pump Mode
Pump Mode
Description
Select type of control operation.
0: Drive Only (Simplex)
1: Drive + 1 Pump
2: Drive + 2 Pumps
Setting
Range
0 to 2 0
Factory
Setting
Menu
Location
Pump Quick
Setup
Page
No.
—
The iQpump drive can control up to 3 pumps with one pump operating from the iQpump drive and the other two pumps being controlled
by the iQpump drive’s digital output contacts. The pump mode parameter P1-01 allows the user to select the number of pumps controlled
by the iQpump drive.
YASKAWA TM.iQp.01 iQpump Drive User Manual 73
Page 74

4.3 Pump System Start/Stop
◆ Auto Mode Start/Stop Selection
Table 4.9 Auto Mode Start/Stop Selection
Parameter
No.
b2-01 0189H
b2-02 018AH
P1-02 0601H
P1-03 0602H
Modbus
Address
Parameter Name
Digital Operator
Display
DC Injection
Braking Start
Frequency
DCInj Start Freq
DC Injection
Braking
Current
DCInj Current
System Units
System Units
Feedback Device
Scaling
Fb Dev Scaling
Description
Sets the frequency at which DC injection braking starts when ramp to
stop (b1-03 = 0) is selected. If b2-01< E1-09, DC injection braking
starts at E1-09.
Selects the DC injection braking current as a percentage of the Drive
rated current.
0: WC:InchOfWater
1: PSI:lb/SqrInch
2: GPM:Gallons/Min
3: F:DegFarenheit
4: CFM:Cubic ft/Min
5: CMH:Cubic m/Hr
6: LPH:Liters/Hr
7: LPS:Liters/sec
8: Bar:Bar
9: Pa: Pascals
10: C: DegCelsius
11: Ft: Feet
12: %: Percent
Scaling of feedback device in user units (P1-02 = 1, e.g. 150PSI).
Digits 1 through 4 set the maximum feedback number. Digit 5
determines the number of decimal places.
Digit 5 = 0: Number format is XXXX
Digit 5 = 1: Number format is XXX.X
Digit 5 = 2: Number format is XX.XX
Digit 5 = 3: Number format is X.XXX
Examples:
01000 = 1000
13000 = 300.0
25000 = 50.00
32000 = 2.000
<0032>
Setting
Range
0.0 to 10.0 0.5 Hz Programming 96
0 to 100 50% Programming 97
0 to 12 1
1 to 36000
(system
units P1-
02)
Factory
Setting
00145
Menu
Location
Pump Quick
Setup
Pump Quick
Setup
Page
No.
—
—
The iQpump drive offers four Auto Mode Start/Stop selections to start and stop the iQpump drive and to enable Auto mode operation.
The selections determined by the setting of parameters b1-01 and b1-02 are as follows:
Setting Description
0Operator
1Terminals
2 Serial Com
3 Option PCB
Note: It is recommended to first select the system units and feedback device scaling. System units can be selected with
parameter P1-02 (system units) and feedback range can be set with parameter P1-03 (feedback device scaling).
Example:
P1-02 System Units = 1: PSI (lb/SqrInch)
P1-03 Feedback Device Scaling = 200 (200PSI)
74 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 75

4.4 Pump Basics
◆ Feedback Device Scaling
4.4 Pump Basics
Table 4.10
Parameter
No.
P1-03 0602H
Modbus
Address
Parameter Name
Digital Operator
Display
Feedback Device
Scaling
Fb Dev Scaling
Description
Scaling of feedback device in user units (P1-02 = 1, e.g. 150PSI).
Digits 1 through 4 set the maximum feedback number. Digit 5
determines the number of decimal places.
Digit 5 = 0: Number format is XXXX
Digit 5 = 1: Number format is XXX.X
Digit 5 = 2: Number format is XX.XX
Digit 5 = 3: Number format is X.XXX
Examples:
01000 = 1000
13000 = 300.0
25000 = 50.00
32000 = 2.000
Setting
Range
1 to 36000
(system
units
P1-02)
Factory
Setting
00145
Menu
Location
Pump Quick
Setup
Page
No.
—
The installed feedback device requires the proper scaling. For proper installation of the feedback device, refer to Chapter 3. The
feedback scaling is determined by programming the feedback device scaling parameter P1-03.
To make setting up the feedback scaling easier, first select the actual system units desired for the iQpump drive to regulate. The system
units can be selected by programming the desired units in parameter P1-02.
Tab l e 4.11
Setting Description Setting Description
0 Inch or Water 7 Liters/sec
1PSI 8Bar
2 GPM 9 Pascal
3 Degrees Fahrenheit 10 Degrees Celsius
4 CFM 11 Feet
5 CMH 12 Percent
6 Liters — —
The feedback range can be specified with one single parameter: P1-03 Feedback Device Scaling. The maximum feedback value for the
iQpump is 3600 (PSI, GPM, etc.).
If the monitors seem more natural in terms of PSI, set P1-02 = 1.
If another engineered unit, such as WC (Inches of Water) or GPM (Gallons per Minute), is desired, set P1-02 to the appropriate value.
The setting programmed in the Feedback Device Scaling (P1-03) will determine the display at 100% and the position of the decimal
point.
X X X X X
Digit 5 Digit 4 Digit 3 Digit 2 Digit 1
Digits 1 through 4 set the desired number to be displayed at 100% PSI.
Digit 5 determines the number of decimal places.
If Digit 5 = 0 number format is XXXX
If Digit 5 = 1 number format is XXX.X
If Digit 5 = 2 number format is XX.XX
If Digit 5 = 3 number format is X.XXX
Example: If P1-02 = 1 (PSI) and P1-03 = 00145, then at 100% PSI, the digital operator would display 145 PSI for monitor U1-24 or
U1-38.
YASKAWA TM.iQp.01 iQpump Drive User Manual 75
Page 76

4.4 Pump Basics
Examples of Feedback Device Scaling
-DRIVEAuto: Set-Point
Rdy
U1-01 = 200 PSI
U1-02 =
U1-91 =
Example: Feedback range 200 PSI.
Program P1-03 to 00200
-DRIVEAuto: Set-Point
0.00 Hz
82.3 PSI
Rdy
U1-01 = 200.0 PSI
U1-02 =
U1-91 =
Example: Feedback range 200.0 PSI.
Program P1-03 to 12000
0.00 Hz
82.3 PSI
Figure 4.1 Feedback Device Scaling Examples
-DRIVEAuto: Set-Point
Rdy
U1-01 = 20.00 PSI
U1-02 =
U1-91 =
Example: Feedback range 20.00 PSI.
Program P1-03 to 22000
-DRIVEAuto: Set-Point
0.00 Hz
82.3 PSI
Rdy
U1-01 = 2.000 PSI
U1-02 =
U1-91 =
Example: Feedback range 2.000 PSI.
Program P1-03 to 32000
0.00 Hz
82.3 PSI
76 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 77

4.5 Use Feedback Level to Start iQpump Controller
4.5 Use Feedback Level to Start iQpump Controller
◆ P1-04, P1-05
Table 4.12
Parameter
No.
P1-04
P1-05
Denotes that parameter can be changed when the Drive is running.
Modbus
Address
0603H
0604H
Parameter Name
Digital Operator
Display
Start Level
Start Level
Start Level Delay
Time
S-Lvl Delay Time
Description
Drive starts when the feedback level drops below the start level for a
time specified in P1-05. This level also specifies the wake up level
when the drive is in Sleep Mode.
Note: When PID operates in the reverse mode, the feedback value
has to rise above the start level for the time programmed in P1-05 for
the system to start. A value of 0 disables this function.
Drive starts when the feedback level drops below the start level for a
time specified in P1-05.
Setting
Range
0.0 to
6000.0
(system
P1-02)
0 to 3600 0 sec
units
Factory
Setting
0.0
(system
units
P1-02)
Menu
Location
Pump Quick
Setup
Pump Quick
Setup
Page
No.
—
—
The iQpump drive has a built-in function that allows the system to start regulating when the feedback signal drops below a programmed
start level (P1-04) for a programmed start level delay time (P1-05).
In many constant pressure applications, it is necessary to start the pump at different feedback levels along with a timer to ensure that the
pump does not cycle on and off, if the pressure is floating too close to the start level. Due to system losses and leaks in pipes, the pressure
will slowly decrease and it is desirable for the iQpump drive system to sense this changing level and automatically restart the automatic
regulation back to desired setpoint.
Example: Constant Pressure System
System Units set to PSI (P1-02 = PSI)
System Setpoint set for 80 PSI
Pressure Transducer: 150 PSI
Desired Operation:
Pump System should start regulating when pressure drops below 70 PSI.
Solution:
Program P1-04 to 70 PSI and P1-05 to 2 sec.
-DRIVE-
Rdy
Display shows Sleep Active message when iQpump waits for feedback signal to fall below
Sleep Active
Wait for Start
-DRIVE-
Rdy
programmed level P1-04.
Display shows Start Delay message when feedback signal has dropped below programmed level P1-04
Start Delay
Timer Active
and the system is about to start after P1-05 timer expires.
Figure 4.2 Constant Pressure System
Note: In order for the system to start regulating, the Run command has to be present. (See 4.3 Pump System Start/Stop).
YASKAWA TM.iQp.01 iQpump Drive User Manual 77
Page 78

4.5 Use Feedback Level to Start iQpump Controller
TIMING CHART: Start Level Operation
Output Frequency
Sleep Level
P2-02
Min. Frequency
P1-06
STOP, 0Hz
System
Set-Point
Sleep Delay Time
P2-03
Start Level
P1-04
0%
Auto Mode Run
OFF Mode
Sleep Active
Wait for Start
Start System
Start Level Delay
P1-05
START DELAY
Start Level Delay
P1-05
AUTO MODE RUN AUTO MODE STOP
SLEEP ACTIVE
START DELAY
Start System, Incoming Run Command
TIME
Feedback
AUTO MODE RUN
Figure 4.3 Start Level Operation
78 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 79

4.6 Low Feedback Level Alarm and Fault Setup
4.6 Low Feedback Level Alarm and Fault Setup
◆ P1-07, P1-08, P1-13
Table 4.13
Parameter
No.
P1-07
P1-08
P1-13
Denotes that parameter can be changed when the Drive is running.
Modbus
Address
0606H
0607H
0108H
Parameter Name
Digital Operator
Display
Low Feedback Level
Low FB Level
Low Feedback Level
Fault Delay Time
Low Lvl FLT Time
Hysteresis Level
Hysteresis Level
Description
The Drive will display a “Low Feedback (LFB)” alarm when the
feedback level falls below the programmed level. The alarm will turn
off when the feedback level rises above the programmed Low
Feedback Level plus the Hysteresis Level (P1-13). A value of 0
disables this function. This function is only active during running
while operating in the auto mode.
The Drive will display a “Low Feedback/Water (LFB/LW)” alarm
when the feedback level falls below the programmed level for a time
specified in P1-08. The Drive will coast to a stop when a fault occurs.
A value of 0 disables this function. This function is only active
during running while operating in the auto mode.
Hysteresis Level used for low and high feedback alarm detection. See
function P1-07 and P1-09.
Setting
Range
0.0 to
6000.0
(system
units
P1-02)
0 to 3600
sec
0.0 to
100.0
(system
units
P1-02)
Factory
Setting
0.0
(system
units
P1-02)
5 sec
0.0
(system
units
P1-02)
Menu
Location
Pump Quick
Setup
Pump Quick
Setup
Pump Quick
Setup
Page
No.
—
—
—
The iQpump drive continuously monitors the systems feedback device and has the ability to show an alarm or even fault the iQpump
drive when the feedback signals fall below a programmed low feedback level (P1-07) for a programmed low feedback level fault delay
time (P1-08).
The hysteresis level (P1-13) determines the low feedback alarm turn-off level. In case of a low feedback alarm, the alarm message will
turn-off when the feedback level rises above the programmed low feedback level (P1-07) plus the hysteresis level (P1-13).
-DRIVE-
Rdy
-DRIVELow FB / Water
Figure 4.1
Low Feedback
Low FBK Sensed
U2-04 =
U2-05 =
LFB/LW
0.00 Hz
0.00 A
Low Feedback Alarm Low Feedback Fault
Figure 4.4 Low Feedback Alarm and Fault Displays
YASKAWA TM.iQp.01 iQpump Drive User Manual 79
Page 80

4.6 Low Feedback Level Alarm and Fault Setup
P1-13
P1-07
Low
Level
Feedback
P1-08
P1-08
Hysteresis
ALARM
LFB
NORMAL
ALARM
LFB
FAU LT
LFB
Figure 4.5 Low Feedback Timing Chart
Example: Constant Pressure System
System Units set to PSI (P1-02 = PSI)
System Setpoint set for 80 PSI
Pressure Transducer: 150 PSI
Desired Operation:
Pump System should show low feedback alarm when feedback level falls below 50 PSI and fault the system if the feedback level
stays there for more than 30 sec.
Solution: Program P1-07 to 50 PSI and P1-08 to 30 sec.
Note: Low feedback detection is only active during running in Auto Mode.
80 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 81

4.7 High Feedback Level Alarm and Fault Setup
4.7 High Feedback Level Alarm and Fault Setup
◆ P1-09, P1-10, P1-13
Table 4.14
Parameter
No.
P1-09
P1-10
P1-13
Denotes that parameter can be changed when the Drive is running.
Modbus
Address
0608H
0609H
0108H
Parameter Name
Digital Operator
Display
High Feedback Level
High FB Level
High Feedback Level
Fault Delay Time
Hgh Lvl FLT Time
Hysteresis Level
Hysteresis Level
Description
The Drive will display a “High Feedback Level (HFB)” alarm when
the feedback level rises above the programmed level. The alarm will
turn off when the feedback level falls below the programmed High
Feedback Level minus the Hysteresis Level (P1-13). This function is
active during running in the hand mode, auto mode, pre-charge and
thrust-bearing mode.
The Drive will initiate a “High Feedback Fault (HFB)” when the
feedback level rises above the programmed level for a time specified
in P1-10. The Drive will coast to a stop when a fault occurs. This
function is active during running in all operation modes.
Hysteresis Level used for low and high feedback alarm detection. See
function P1-07 and P1-09.
Setting
Range
0.0 to
6000.0
(system
P1-02)
0 to 3600 2 sec
0.0 to
100.0
(system
P1-02)
units
units
Factory
Setting
155.0
(system
units
P1-02)
0.0
(system
units
P1-02)
Menu
Location
Pump Quick
Setup
Pump Quick
Setup
Pump Quick
Setup
Page
No.
—
—
—
The iQpump drive continuously monitors the systems feedback device and has the ability to show an alarm and/or fault the iQpump drive
when the feedback signals rise above a programmed high feedback level (P1-09) for a programmed high feedback level fault delay time
(P1-10).
The hysteresis level (P1-13) determines the high feedback alarm turn-off level. In case of a high feedback alarm, the alarm message will
turn-off when the feedback level falls below the programmed high feedback level (P1-09) minus the hysteresis level (P1-13).
-DRIVE-
Rdy
-DRIVEHigh Feedback
High Feedback
High FBK Sensed
High Feedback Alarm
High Feedback Fault
U2-04 =
U2-05 =
HFB
0.00 Hz
0.00 A
Figure 4.6 High Feedback Alarm and Fault Displays
YASKAWA TM.iQp.01 iQpump Drive User Manual 81
Page 82

4.7 High Feedback Level Alarm and Fault Setup
High
Level
P1-09
P1-13
FEEDBACK
P1-10
ALARM
LFB
NORMAL
TIME
P1-10
ALARM
LFB
FAULT
LFB
Hysteresis
Figure 4.7
Example: Constant Pressure System
System Units set to PSI (P1-02 = PSI)
System Setpoint set for 80 PSI
Pressure Transducer: 150 PSI
Desired Operation:
Pump System should show High Feedback Alarm when feedback level rises above 90 PSI and fault the system if the feedback level stays
there for more than 30 sec.
Solution: Program P1-09 to 90 PSI and P1-10 to 30 sec.
Note: High feedback detection is active during running in both Hand and Auto Mode.
82 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 83

4.8 Feedback Loss Detection
◆ b5-12, b5-13, b5-14
4.8 Feedback Loss Detection
Table 4.15
Parameter
No.
b5-12 01B0H
b5-13 01B1H
b5-14 01B2H
Modbus
Address
Parameter Name
Digital Operator
Display
PI Feedback
Reference
Missing Detection
Selection
Fb los Det Sel
PI Feedback Loss
Detection Level
Fb los Det Lvl
PI Feedback Loss
Detection Time
Fb los Det Time
Description
0: Disabled
1: Alarm
2: Fault
Sets the PI feedback loss detection level as a percentage of maximum
frequency (E1-04).
Sets the PI feedback loss detection delay time in terms of seconds. 0.0 to 25.5 1.0 sec Programming 101
Setting
Range
0 to 2 0 Programming
0 to 100 0% Programming 101
Factory
Setting
Menu
Location
Page
No.
101
The iQpump drive offers a feedback signal loss detection function in case the connected feedback device fails or a problem with the
wiring occurs.
■ b5-12 PI Feedback Reference Missing Detection Selection
Setting Description
0 Disabled (factory default)
1Alarm
2Fault
Factory default setting: 0: (Disabled)
To enable feedback loss detection, program parameter b5-12 to a value greater than 0 and b5-13 Feedback Loss Detection Level to the
minimum feedback level for normal operation.
b5-13 Feedback Loss Detection Level Range: 0 to 100%
b5-14 Feedback Loss Detection Time Range: 0.0 to 25.5 sec. (1.0 Factory Default)
Measured
Feedback
b5-13
Feedback
Feedback
Loss Output
Loss Digital Output
T
T
TIME
T = b5-14
ON (CLOSED)
OFF (OPEN)
Figure 4.8 Loss of PI Feedback Feature
Example: Constant Pressure System
Pressure Transducer: 150 PSI (4 ~ 20mA)
Desired Operation:
Feedback Loss Fault when pressure falls below 15 PSI for more than 5.0 sec.
Solution:
Program b5-12 to 2 Feedback Loss Detection Fault
Program b5-13 to 10% (15 PSI divided by 150 PSI times 100% = 10%)
Program b5-14 to 5.0 sec.
YASKAWA TM.iQp.01 iQpump Drive User Manual 83
Page 84

4.9 Basic Pump Protection
4.9 Basic Pump Protection
The iQpump drive offers dedicated functions to protect the pump system from possible occurrences. The following section explains the
basic pump protection that the iQpump drive offers. One or more of the basic protection functions can protect from occurrences such as:
•Dry Well
•Air in System
• Blocked Impeller
•No Water
• Low Feedback (e.g. Low System Pressure Detection)
• High Feedback (e.g. High System Pressure Detection)
◆ Pump System Shutdown When System Setpoint Cannot Be Maintained
The iQpump drive continuously monitors pump system regulation and is able to shutdown the pump system after a programmable time in
case the system is not able to maintain the system setpoint. The Pump Protection function consists of 2 parameters:
Tab l e 4.16
Parameter
No.
P1-11
<0032>
P1-12
<0032>
Denotes that parameter can be changed when the Drive is running.
■ P1-11 Maximum Setpoint Difference: (Factory Default is 0.0 = Disabled)
Modbus
Address
0106H
0107H
Parameter Name
Digital Operator
Display
Maximum Setpoint
Difference
Max SetPoint Diff
Not Maintaining
Setpoint and Loss of
Prime Time
Setpoint-LOP Tim
Description
When the Drive is running and the difference between the setpoint
and the feedback exceeds the level in P1-11 for the time specified in
P1-12, the Drive will trip on a “Not Maintaining Setpoint (NMS)”.
The Drive will coast to a stop when a fault occurs. A value of 0
disables this function. This function is only active during running
while operating in auto mode.
Delay time before a Not Maintaining SetPoint or Loss of Prime Time
fault occurs. Pump protection criteria specified in P1-11 or P1-14
must be met for the Drive to fault. The Drive will coast to a stop
when a fault occurs. A value of 0 disables both Loss of Prime and
Not Maintaining SetPoint faults.
Setting
Range
0.0 to
6000.0
(system
P1-02)
0 to 3600 60 sec
units
Factory
Setting
0.0
(system
units
P1-02)
Menu
Location
Pump Quick
Setup
Pump Quick
Setup
Page
No.
—
128
The iQpump drive can be configured to display a Not Maintaining Setpoint (NMS) fault when the difference between the setpoint and the
feedback exceeds the Maximum Setpoint Difference (P1-11). When the Maximum Setpoint Difference has been exceeded, the drive will
trip on NMS fault and will coast to a stop when the fault occurs.
Setting P1-11 to a value of 0 will disable this function. This function is only active during operation in the Auto Mode.
The Maximum Setpoint Difference (P1-11) works in conjunction with the Not Maintaining Setpoint and Loss of Prime Time (P1-12).
The units for this parameter are determined by the System Units (P1-02)
■ P1-12 Not Maintaining Setpoint and Loss of Prime Time: (Factory Default is 60 sec.)
The iQpump drive can be configured to display a Maximum Setpoint Difference (P1-11) fault when the difference between the setpoint
and the feedback are exceeded for the time programmed in the Not Maintaining Setpoint and Loss of Prime Time (P1-12). The drive will
coast to a stop after the level has been exceed for the specified time programmed in P1-12.
This function is only active during operation in the Auto Mode.
The Not Maintaining Setpoint and Loss of Prime time (P1-12) is also used for the Prime Loss Level (P1-14) function. refer to Prime Loss
Level (P1-14) for further description.
The Not Maintaining Setpoint and Loss of Prime Time (P1-12) works in conjunction with Maximum Setpoint Difference (P1-11) and
Prime Loss Level (P1-14).
Note: The time value programmed into P1-12 is shared by Maximum Setpoint Difference (P1-11) and Prime Loss Level _(P1-14)
functions. However, independent times are maintained. If one function time, such as P1-11, has elapsed, the other functions time (P1-14)
is still maintained until this time has elapsed.
84 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 85

4.9 Basic Pump Protection
.
-DRIVE-
Setpoint Not Met
RDY
NMS
P1-11
P1-11
U1-04 =
U2-05 =
0.00 Hz
0.00 A
Figure 4.9 Not Maintaining Setpoint (NMS) Fault Display
PRESSURE
FEEDBACK
SETPOINT
Not Maintaining
Setpoint Time P1-12
Not Maintaining
Setpoint (NMS) Fault
TIME
Figure 4.10
Example: Constant Pressure System
System Units set to PSI (P1-02 = PSI)
System Setpoint set for 80 PSI
Pressure Transducer: 150 PSI
Desired Operation:
Pump System should shutdown when the difference between the actual system pressure (transducer feedback level) and the system
setpoint (80 PSI) is greater than 10 PSI continuously for more than 40 sec.
Solution:
Program P1-11 to 10 PSI
Program P1-12 to 40 sec.
The Pump Protection function is only active during running while operating in auto mode. On fault, the iQpump drive will coast to a stop.
YASKAWA TM.iQp.01 iQpump Drive User Manual 85
Page 86

4.9 Basic Pump Protection
THIS PAGE INTENTIONALLY LEFT BLANK.
86 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 87

5
Basic Programming
This Manual contains descriptions of all user accessible parameters contained in the iQpump
drive. Parameters are listed in alpha-numerical order. Parameter number and name, along with a
detailed description and its settings are described on the following pages.
5.1 iQpump Basic Programming Parameters . . . . . . . . . . . . . . . . . . . 88
5.2 Pump Basic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
5.3 Pump Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
5.4 T1 Auto Tuning. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
YASKAWA TM.iQp.01 iQpump Drive User Manual 87
Page 88

5.1 iQpump Basic Programming Parameters
5.1 iQpump Basic Programming Parameters
The initialization group contains parameters associated with initial set-up of the iQpump drive. Parameters involving the display
language, access levels, initialization and password are located in this group.
◆ A1 Initialization
■ A1-01 Access Level Selection
Setting Description
0 Operation Only
2 Advanced Level (factory default)
If the iQpump drive is programmed for Operation Only (A1-01 = “0: Operation Only”), then only the OPERATION and the
PROGRAMMING menus are accessible. Within the PROGRAMMING menu only parameters A1-01 and A1-04 are adjustable.
If A1-01 is configured for Advanced Access (A1-01 = “2: Advanced Level”), then all menus and all parameters are shown. If the Access
Level Selection is set to Advanced, all parameters should be adjustable unless:
1. The iQpump drive parameters are password protected (A1-04) which will prevent access to A1-00 through A1-03 and all A2
parameters.
2. A digital input has been configured as a Program Lockout (H1-0X = 1B) is active.
3. During serial communication writing, if a parameter change is also attempted via the digital operator, a “BUSY - WRITE
PROTECTED” message will display. Parameter change will not be possible from the digital operator until an Enter command is
received via the serial communication to finish the serial writing process.
■ A1-03 Initialize Parameters
Setting Description
0 No Initialize (factory default)
1110 User Initialize
2220 2-Wire Initialize
3330 3-Wire Initialize
The iQpump drive can be set back to one of three default states via the A1-03 parameter.
1. User Initialization – 1110: The modified iQpump drive parameters are returned to the values selected as user settings. User settings are
stored when parameter o2-03= “1: Set Defaults.”
2. 2-Wire Initialization – 2220: The iQpump drive parameters are returned to factory default values with digital inputs S1and S2
configured as Forward Run and Reverse Run, respectively.
3. 3-Wire Initialization – 3330: The iQpump drive parameters are returned to factory default values with digital inputs S1, S2, and S5
configured as Run, Stop, and Forward/Reverse respectively.
After an initialization is performed, parameter A1-03 will automatically be set back to 0.
Figure 5.1
Stop switch
S1
S2
SN
FWD Run/Stop
REV Run/Stop
(NC contact)
Operation switch
(NO contact)
Run command
(run on momentary close)
Stop command
(stop on momentary open)
2-wire control
3-wire control2-wire control
SN
Sequence input common
Figure 5.1 2 & 3-Wire Control Wiring Examples
88 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 89

5.1 iQpump Basic Programming Parameters
Important: Some parameters are unaffected by either the 2-wire or 3-wire initialization. The following parameters will not be reset when
parameter A1-03 = 2220 or 3330:
A1-00 Language Selection
E1-03 V/f Pattern Selection
o2-04 kVA Selection
◆ b1 Sequence
The Sequence Group contains parameters associated with starting and stopping the iQpump drive. Parameters involving the Run
Command, Speed Reference and Setpoint location, Stopping Method and Hand/Auto changeover are located in this group.
■ b1-01 Frequency Reference Selection
Setting Description
0 Operator - Digital Preset Speed d1-01 (factory default)
1 Terminals - Analog Input Terminal A1 (or Terminal A2, see Parameter H3-13)
2 Serial Com - RS-485 Terminals R+, R-, S+ and S-
3 Option PCB - Option Board connected at 2CN
In order to run the iQpump drive and motor, the iQpump drive must receive a Run command and a Auto Setpoint command. Parameter
b1-01 specifies from where the Auto setpoint is received when in the “Auto” mode. Switching into the “Auto” mode can be done by
pressing the AUTO button on the digital operator while the iQpump drive is stopped.
Important: If a Run command is input to the iQpump drive but no corresponding Auto setpoint is input, the Run indicator on the digital
operator will turn on and the STOP indicator on the digital operator will blink.
If you want the iQpump drive to follow the “Hand Reference” set by the digital operator: Use the “Hand” mode by pressing the
hand key and set P5-01 = “1: Hand Reference (P5-02).” The hand reference can then be entered into the U1-01 monitor parameter in the
“-DRIVE-” Menu.
The iQpump drive offers the ability to provide four types of “Auto Setpoint” reference sources. These Auto Setpoint reference sources
are determined by the setting of b1-01 and the drive set to “Auto” mode by pressing the Auto key on the digital operation.
Note: Prior to programming, it is recommended to first select the system units (P1-02) and the feedback device, Scaling (P1-
03). P1-03 will automatically scale the iQpump setpoint. Please refer to Section 4.1 Start Up for further set up details.
Example:
P1-02 = 1: PSI
P1-03 = 200, feedback range = 200 PSI.
If you want the iQpump drive to follow an “Auto Set-Point” set by the digital operator: Set b1-01 = “0: Operator” (factory default),
The Auto setpoint can then be entered into the U1-01 monitor parameter in the “-DRIVE-” menu.
YASKAWA TM.iQp.01 iQpump Drive User Manual 89
Page 90

5.1 iQpump Basic Programming Parameters
Figure 5.2
Figure 5.2 Digital Operator Auto Setpoint
If you want the iQpump drive to follow an “Auto Setpoint” set by the analog input: Set b1-01 = “1: Terminals,” and connect a
potentiometer or external signal to the iQpump drive. Refer to Figure 5.3 for connection diagram for the setpoint potentiometer.
Figure 5.3 Setpoint Potentiometer Connection Diagram
Refer to Figure 5.4 for the connection diagram for an external analog signal setpoint reference.
Note: When b1-01 = 1 (terminals) and P5-01 = 0 (hand mode reference source), the setpoint and the hand reference are
determined by the external analog signal.
90 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 91

5.1 iQpump Basic Programming Parameters
Figure 5.3
Figure 5.4 External Analog Signal Setpoint Reference
If you want the iQpump drive to receive the “Auto Setpoint” from serial communication: Set b1-01 = “2: Serial Com,” and connect
the RS-485/422 serial communications cable to terminals R+, R-, S+, and S- on the control I/O terminal block.
Refer to Figure 5.5 for the connection diagram using a PC to provide the auto setpoint reference to the iQpump drive. Further information
regarding Modbus address and communication protocols are referenced in the Section Appendix: A and Section Appendix: D .
Figure 5.4
Figure 5.5 Connection Diagram of PC or PLC
If you want the iQpump drive to receive the “Auto Setpoint” for a network communication option card: Set b1-01= “3: Option
PCB”, and plug a network option board (p/n SI-J) into the 2CN port on the iQpump drive Control PCB. Consult the manual supplied with
the option board for instructions on integrating the iQpump drive into the network system.
The iQpump drive can support the following network communication options. Refer to the appropriate Installation Guide (IG) and
Technical Manual (TM) for further details. These network communications documents can be located at http://iQpump.yaskawa.com
.
• Profibus DP Option Card CM061 Manual: IG.AFD.12
• DeviceNet Option Card CM05X Manual: IG.AFD.14
• Modbus Plus Option Card CM071 Manual: IG.AFD.17
• Modbus TCP/IP Option Card CM090 Manual: IG.AFD.25
• EtherNet/IP Option Card CM092 Manual: IG.AFD.26
YASKAWA TM.iQp.01 iQpump Drive User Manual 91
Page 92

5.1 iQpump Basic Programming Parameters
Important: If b1-01= “3: Option PCB” but a network card is not installed in 2CN, an OPE05 Operator Programming Error will be
displayed on the digital operator and the iQpump drive will not run.
■ b1-02 Run Source
Setting Description
0 Operator (factory default)
1Terminals
2 Serial Com
3 Option PCB
■ Start/Stop from Keypad (Parameter b1-02 = 0)
The iQpump drive comes factory programmed for Start and Stop from the Keypad.
The iQpump drive can be programmed to receiver a Run command from four different inputs: digital operator, terminals, serial
communications, or an option PCB.
If the Run command input is determined by the digital operator: Set b1-02 = “0: Operator,” and the hand key will be used to provide
the Run command to the iQpump drive.
If the Run command input is determined by the external terminals: Set b1-02 = “1: Terminals” and initiate an external Run
command by a contact closure between terminals S1 and SN. Refer to Figure 5.6 for the connection diagram of the external Run
command.
Note: To use the external terminals requires the iQpump drive to be set to “Auto” mode by pressing the Auto key.
Figure 5.5
b1-02 = 1
Figure 5.6 Connection Diagram of External Start/Stop Switch
If the Run command is determined by Serial Communications: b1-02 = “2: Serial Communications,” and initiate the Run command
through the serial communications. Refer to Figure 5.5 (in the previous b1 sequence section) for the connection diagram for serial
communications through the RS232/485 terminals. The following is a simple setup procedure for programming the iQpump drive and PC
Serial communications to initiate Run and Stop commands through serial communications. Section Appendix: E has further details on
the Modbus communications.
1. Program b1-02 = “2: Serial communications.”
2. Program the following H5 parameters:
H5-01 Serial Communication Address: 31
H5-02 Serial Baud Rate: 9600 Baud (setting 3).
H5-03 Serial Communication Parity Selection: None (setting 0).
3. Initiate a Start/Stop command
92 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 93

5.1 iQpump Basic Programming Parameters
iQpump command register number: 0001
Stop Command:
Start Command: Transmit value of 0001 (16 bit) to iQpump command address.
Reset Command: Transmit value of 0008 (16 bit) to iQpump command address.
Transmit value of 0000 (16 bit) to iQpump command address.
If the Run command input is determined by a network communications option PCB: b1-02 = “3: Option PCB,” and initiate the Run
command through the available network communications option PCB listed below. The Installation Guides (IG) and Technical Manuals
(TM) are available at http://iQpump.yaskawa.com
.
The iQpump Controller allows for monitoring, diagnostics and control using any of the following communication option cards:
• Profibus DP Option Card CM061 Manual: IG.AFD.12
• DeviceNet Option Card CM05X Manual: IG.AFD.14
• Modbus Plus Option Card CM071 Manual: IG.AFD.17
• Modbus TCP/IP Option Card CM090 Manual: IG.AFD.25
• EtherNet/IP Option Card CM092 Manual: IG.AFD.26
Note: Refer to the communication card instruction manual or consult factory for installation and operation instructions.
■ Start/Stop from Comm. Option Card (Parameter b1-01 = 3):
The iQpump Controller allows for the Setpoint reference to be set via any of the following communication option cards:
• Profibus DP Option Card CM061 Manual: IG.AFD.12
• DeviceNet Option Card CM05X Manual: IG.AFD.14
• Modbus Plus Option Card CM071 Manual: IG.AFD.17
• Modbus TCP/IP Option Card CM090 Manual: IG.AFD.25
• EtherNet/IP Option Card CM092 Manual: IG.AFD.26
■ Feedback Device
The iQpump Controller requires a feedback device (e.g. Pressure transducer, flow meter, etc.) to perform automatic system regulation.
Any analog 0~10V or 4-20mA feedback device can be used in combination with the iQpump controller.
Connecting Your Feedback Device to the iQpump Controller
Note: The factory default setting for the iQpump controller is 4~20mA feedback device connected to
analog input A2.
To successfully operate the iQpump drive remotely, an external run command must be received by the
iQpump drive. Parameter b1-02 specifies from where the run command will be accepted.
Although the Run Source and the Reference Source (b1-01) are normally taken from the same source (e.g.
digital operator, terminals or serial communication), this is not always the case.
To issue a run command from the digital operator: Set b1-02 = “0: Operator,” and use the HAND and
OFF buttons to start and stop the iQpump drive.
To issue the run command from the terminals: Set b1-02 = “1: Terminals,” and select between 2-wire
and 3-wire control operation by doing the following:
2-Wire Control The factory default setting is for 2-wire operation. In the 2-wire configuration a closure between S1 and SN will be
interpreted as a Forward Run command by the iQpump drive.
Figure 5.6
S1
FWD Run/Stop
S2
REV Run/Stop
SN
Figure 5.7 2-Wire Control
3-Wire Control When any of the multi-function digital input parameters, H1-01 through H1-05, is set to 0, terminals S1 and S2 become
Run and Stop, respectively. The multi-function digital input that was set to 0 will function as a Forward/Reverse input for the iQpump
YASKAWA TM.iQp.01 iQpump Drive User Manual 93
Page 94

5.1 iQpump Basic Programming Parameters
drive. When the Forward/Reverse input is open the iQpump drive will run in the Forward direction and when the input is closed, the
iQpump drive will run in the Reverse direction.
In 3-wire operation a momentary closure (> 50 mS) of S1 will cause the iQpump drive to run provided that S2 is held closed. The
iQpump drive will stop anytime the S2-SN connection is broken. If the 3-wire configuration is implemented via a 3-wire Initialization
(A1-03 = “3330: 3-Wire Initial”), then terminal S5 becomes the Forward/Reverse input.
Note: Reverse operation is disabled in the iQpump drive; however, in 3-wire control, one of the multi-function digital inputs
needs to be programmed to 0. Otherwise, the 3-wire control will not work.
Stop switch
(NC contact)
Operation switch
(NO contact)
Run command
(run on momentary close)
Stop command
(stop on momentary open)
SN
Sequence input common
Figure 5.8 3-Wire Control
To issue a Run command via serial communication: Set b1-02 = “2: Serial Com” and connect the RS-485/422 serial communication
cable to R+, R-, S+, and S- on the removable terminal block.
To issue the Run command via the network option card: Set b1-02= “3: Option PCB”, and plug a network option board (p/n SI/J) into
the 2CN port on the Control PCB. Consult the manual supplied with the option board for instructions on integrating the iQpump drive
into your network System.
Important: If b1-01= “3: Option PCB” but a network card is not installed in 2CN, an “OPE05” operator programming error will be
displayed on the digital operator and the iQpump drive will not run.
■ b1-03 Stopping Method
There are four methods of stopping the iQpump drive when the Run command is removed.
Setting Description
0Ramp to Stop (factory default)
1Coast to Stop
2 DC Injection to Stop
3Coast w/Timer
0: Ramp to stop: When the Run command is removed, the iQpump drive will decelerate the motor to 0 rpm. The rate of deceleration is
determined by the active deceleration time. The factory default Decel Time is in parameter C1-02.
When the output frequency has dropped below the DC Injection Start Frequency in b2-01 (Default = 0.5 Hz) DC current will be injected
in the motor at a level determined by b2-02 (50% Default). The DC Injection condition will occur for the time specified by b2-04 (0.0
Default), to establish the end point of the ramp. DC injection can be used to insure the motor is at zero rpm prior to the iQpump drive
shutting off.
94 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 95

5.1 iQpump Basic Programming Parameters
Figure 5.7
Run Command
100 %
Output Frequency
0 %
Deceleration Time (C1-02)
TIME
b2-01
DC Injection Brake
| b2-04 |
ON
OFF
(CLOSED)
(OPEN)
Figure 5.9 Deceleration to Stop
The actual deceleration time can be determined by the following formula.
Output Freq. at time of stop command
Time to Stop
------------------------------------------------------------------------------------------Maximum Frequency (E1-04)
Setting of active Decel Time (C1-02 or C1-04)×=
If S-Curve characteristics are specified by the iQpump drive programming, they will add to the total time to stop.
1: Coast to stop: When the Run command is removed, the iQpump drive will turn off its output and the motor will coast (uncontrolled
deceleration). The friction of the driven equipment will eventually overcome any residual inertia of the system and the rotation will stop.
Figure 5.8
Run Command
ON
OFF
(CLOSED)
(OPEN)
100 %
Motor Speed
Output Frequency
0 %
TIME
Drive Output Frequency Interrupted
Figure 5.10 Coast to Stop
Important: After a stop is initiated, a subsequent Run commands input before the Minimum Baseblock Time (L2-03) has expired, will
be ignored.
2: DCInj to Stop: When the Run command is removed, the iQpump drive will Baseblock (turn off its output) for the Minimum
Baseblock Time (L2-03). Once the Minimum Baseblock Time has expired, the iQpump drive will inject DC current into the motor
windings to lock the motor shaft. The stopping time will be reduced as compared to Coast to Stop. The level of DC Injection current is set
by parameter b2-02 (50% Default). The DC Injection brake time is determined by the set value in b2-04 and the output frequency at the
time the Run command is removed.
Time BrakeInjection DC
=
××
FrequencyOutput 1004)-(b2
04)-(E1Frequency Maximum
YASKAWA TM.iQp.01 iQpump Drive User Manual 95
Page 96

5.1 iQpump Basic Programming Parameters
Run Command
100 %
ON
(CLOSED)
OFF
(OPEN)
b2-04 x 10
Output Frequency
0 %
Drive Output Voltage Interrupted
Minimum Baseblock
Time (L2-03)
DC Injection Brake
DC Injection Brake Tim e
b2-04
DC Injection Brake Time
b2-04
10%
100% (Maximum
Output Frequency)
Figure 5.11 DC Injection Braking to Stop
Important: If an overcurrent (OC) fault occurs during DCInj to Stop, lengthen the Minimum Baseblock Time (L2-03) until the fault no
longer occurs.
3: Coast w/Timer: When the Run command is removed, the iQpump drive will turn off its output and the motor will coast to a stop. If a
Run command is input before time T (operation wait time) expires, the iQpump drive will not run and the Run command will need to be
cycled before operation can occur. The time T (operation wait time) is determined by the output frequency when the Run command is
removed and the active deceleration time (C1-02).
Figure 5.9
Run Command
100 %
Output Frequency
0 %
Drive Output
Voltage
Interrupted
Timer Value T
Ignored
Run Command
Timer Value T
(C1-02)
ON
(CLOSED)
OFF
(OPEN)
Deceleration
Time (C1-02)
Minimu m
Baseblock
Time (L2-03)
Operation Wait Time (T)
Minimum
Output
Frequency
Output Frequency at Stop Command Input
100% (Maximum
Frequency)
Output
Figure 5.12 Coast to Stop with Timer
◆ b2 DC Braking
The DC Braking Group contains parameters associated with the DC injection braking feature. Parameters involving the starting
frequency, current level, braking time, and motor pre heat current level are located here.
■ b2-01 DC Injection Braking Start Frequency
Setting Range: 0.0 to 10.0 Hz
Factory Default: 0.5 Hz
Parameter b2-01 sets the output frequency where the iQpump drive begins DC Injection during Ramp to stop in order to lock the rotor of
the motor and established the end point of the ramp. If b2-01 < E1-09 (Minimum Frequency), then DC Injection begins at E1-09.
Parameter b2-01 also determines the output frequency that the iQpump drive must be at or below before a Zero Speed condition is
considered true. This affects any digital output configured as a Zero Speed signal (H2-0x = “1: Zero Speed”).
96 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 97

5.1 iQpump Basic Programming Parameters
Figure 5.10
DC injection
b2-01
Output Frequency
||
b2-04
t
ime
Figure 5.13 DC Injection Braking During Stopping
■ b2-02 DC Injection Braking Current
Setting Range: 0 to 100%
Factory Default: 50%
The level of DC Injection Braking Current affects the strength of the magnetic field attempting to lock the motor shaft. Increasing the
level of current will increase the amount of heat generated by the motor windings and should only be increased to the level necessary to
hold the motor shaft. DC Injection current is set in percentage of iQpump drive rated output current. The iQpump drive rated output
current is stated on the iQpump drive nameplate.
■ b2-03 DC Injection Braking Time at Start
b2-04 DC Injection Braking Time at Stop
Setting Range: 0.00 to 10.00 sec
Factory Default: b2-03 = 0.00 sec
b2-04 = 0.00 sec
The iQpump drive can be programmed to automatically DC Inject for a predetermined amount of time prior to accelerating to speed (b2-
03) and/or at the end of a Ramp to stop (b2-04). Parameter b2-03 can be used to stop a rotating motor prior to attempting acceleration (i.e.
a wind milling fan). If DC Injection braking at start or Speed Search is not enabled, attempting to iQpump drive a spinning motor may
cause nuisance tripping.
Parameter b2-04 can be used to resist any residual motion of the load after the deceleration has finished.
Figure 5.11
Output Frequency
DC injection
b2-03 b2-04
Figure 5.14 DC Injection Braking During Starting and Stopping
Parameter b2-04 also serves the function of affecting the length of time DC Injection to stop (b1-03 = “2: DC Injection to Stop”) will
occur.
■ b2-09 Motor Pre-Heat Current
Setting Range: 0 to 100%
Factory Default: 0%
A DC current can be circulated within the motor windings while the motor is stopped. The current will produce heat within the motor and
prevent condensation. Parameter b2-09 determines the percentage of iQpump drive rated output current that will be used for the motor
pre-heat function. This function can be useful in applications where the motor sits for extended periods of time in humid conditions.
Motor pre-heating can only be initiated by closing a digital input programmed as a Motor Pre-heat Input (H1-0x = 60). Check with the
motor manufacturer to determine the maximum acceptable current level the motor can withstand when stopped. Be sure not to exceed the
motor manufacturers recommended level.
YASKAWA TM.iQp.01 iQpump Drive User Manual 97
Page 98

5.1 iQpump Basic Programming Parameters
◆ b5 PI Function
The capability to accept an analog signal as feedback for a PI (Proportional + Integral) control function is built into the iQpump drive.
Figure 5.12
Speed Command / PI Setpoint
D1-04
D1-02
D1-01
Option Card
Serial Com
0
1
PI Differential
Fdbk. H3-09=16
Terminal A1
PI Setpoint
PI Feedback
Terminal A1
Terminal A2
b1-01
4
3
2
1
0
1
PI Different ial
Fdbk. H3-09=16
0
1
H3-09=B
Frequency Reference
using multi-step
PI SFS cancel
H1-xx=34
PI SFS
b5-17
PI Different ial
Fdbk. H3-09=16
+
1
0
PI Different ial
Fdbk. H3-09=16
command
Frequency reference
(U1-01)
P1-03
1
0
PI SFS cancel
H1-xx=34
PI SFS
b5-17
b5-01=0
Scaling
PI control is OFF under t he following
conditions:
- b5-01=0
- H3-xx=19 and the terminal status is
H1
ON
PI Set Point
(U1-38)
Scaling
PI Input
Characteristic
Caracteristic
H1-xx=35
1
0
PI Feedback
(U1-24)
10
+
-
Scaling
H3-09=16
+
+
PI offse
(b5-07)
0
-1
Z
1
10
PI Different ial
Fdbk. H3-09=16
t
b5-01=3
b5-01=1
P
Proportional
gain
b5-02
PI Input
(U1-36)
PI output monitor
I-time
b5-03
0
1
Integral Hold
H1-xx=31
1/t
OFF
ON
(U1-37)
+
+
I - limit
b5-04
-1
Z
+
+
Integral Reset
H1-xx=30
Upper limit
Fmax x109%
Output
+
+
b5-07
0
frequency
PI Output
Gain
b5-10
0
-1
Z
1
PI Output
Characteristic
b5-09
PI Different ial
Fdbk. H3-09=16
SFS
1
PI offset
Lower limit 0
P1-06
Minimum
Pump Speed
PI delay time
PI Limit
b5-06
b5-08
1/t
0
+
+
1
Figure 5.15 PI Block Diagram
The analog feedback to the iQpump drive for the PI control is via the A2 terminal. The iQpump drive must be programmed (H3-09 = “B:
PI Feedback”) to use terminal A2 as feedback for the PI functionality of the iQpump drive.
The PI setpoint can be configured to come from one of many different inputs or parameters. Table 5.1 on page 99 describes the options
for originating the PI setpoint.
98 YASKAWA TM.iQp.01 iQpump Drive User Manual
Page 99

5.1 iQpump Basic Programming Parameters
Table 5.1 PI Setpoint Options
If these conditions are true
The PI Setpoint will be read from:
Parameter b5-19 1 N/A N/A
Modbus Register 06H 0 ON N/A
d1-01 0 OFF 0
Ter m inal A 1 0 OF F 1
Serial Comm. 0 OFF 2
Option PCB 0 OFF 3
Status of b5-18 =
Status of Modbus
Register 0Fh bit 1
Status of b1-01 =
In some situations there are two feedback inputs. The iQpump drive can be programmed to maintain a set differential between two analog
signals. If input A2 is configured as a “PI Differential Mode” (H3-09 = “16: PI Differential”), then the iQpump drive will maintain a set
difference between the measurements read on inputs A1 and A2. This differential setpoint is programmed by parameter (b5-07).
■ b5-01 PI Mode Setting
Setting Description
0 Disabled (factory default)
1Enabled
3Fref+PI
The iQpump drive can be used as a stand-alone PI controller. If PI functionality is selected by parameter b5-01, the iQpump drive will
adjust its output to cause the feedback from a transmitter to match the PI setpoint (b5-19). The setting of b5-01 will determine whether PI
functionality is disabled (b5-01 = “0: Disabled”), enabled (b5-01 = “1: Enabled”), or enable with the output of the PI function used to
trim a Speed Command (b5-01 = “3: Fref+PI”).
■ b5-02 Proportional Gain Setting
Setting Range: 0.00 to 25.00
Factory Default: 2.00
The proportional gain will apply a straight multiplier to the calculated difference (error) between the PI Setpoint and the measured
transmitter feedback at terminal A2. A large value will tend to reduce the error but may cause instability (oscillations) if too high. A small
value may allow to much offset between the setpoint and feedback (See Figure 5.16 on following page).
■ b5-03 Integral Time Setting
Setting Range: 0.0 to 360.0 sec
Factory Default: 5.0 sec
The Integral factor of PI functionality is a time-based gain that can be used to eliminate the error (difference between the setpoint and
feedback at steady state). The smaller the Integral Time set into b5-03, the more aggressive the Integral factor will be. To turn off the
Integral Time, set b5-03 = 0.00.
YASKAWA TM.iQp.01 iQpump Drive User Manual 99
Page 100

5.1 iQpump Basic Programming Parameters
Figure 5.13
Measured Feedback
Feedback Feedback
Setpoint
Offset
Measured Feedback
TIME
Setpoint
TIME
Zero
offset with
Integral Action
No Integral With Integral
Figure 5.16 PI Feedback Response Characteristics
■ b5-04 Integral Limit Setting
Setting Range: 0.0 to 100.0%
Factory Default: 100.0%
On some applications, especially those with rapidly varying loads, the output of the PI function may have large oscillations. To suppress
these oscillations, a limit can be applied to the integral factor by programming b5-04.
■ b5-06 PI Output Limit
Setting Range: 0.0 to 100.0%
Factory Default: 100.0%
Places a cap on the output of the PI function. Limiting the PI function may help to prevent large overshoots in the iQpump drive’s
response to error (the difference between the setpoint and the feedback).
■ b5-07 PI Offset Adjustment
Setting Range: -100.0% to +100.0%
Factory Default: 0.0%
The PI Offset Adjustment parameter has two different uses. Parameter b5-07 serves different functions depending on whether it is used
on a standard PI loop or a Differential PI loop.
Parameter b5-07 causes an offset to be applied to the output of the PI function in a non-Differential PI loop. Every time the PI output is
updated, the offset (b5-07) is summed with the PI output. This can be used to artificially kick-start a slow starting PI loop.
If the iQpump drive is configured for Differential PI Regulation (H3-09 = “16: PI differential”), then this parameter is the target setpoint
for the differential to be maintained between the signal measured on analog input A1 and the signal measured on analog input A2.
■ b5-08 PI Primary Delay Time Constant
Setting Range: 0.00 to 10.00 sec
Factory Default: 0.00 sec
Acts as a time based filter that lowers the responsiveness of the PI function, but also makes the function more stable when the setpoint
varies rapidly or when the feedback is noisy.
100 YASKAWA TM.iQp.01 iQpump Drive User Manual
 Loading...
Loading...