

Schneider Electric ATV71 Altivar

Programming Manual
30072-452-92
Retain for future use.
Altivar® 71
Variable Speed Drives for
Synchronous and Asynchronous
Motors
Specification 383
Software V2.8

30072-452-92 Altivar® 71 Programming Guide
01/2010 Table of Contents
Table of Contents
Please Note - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 5
Before you begin - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -6
Documentation structure - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -7
Software enhancements - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -8
Steps for setting up - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 12
Factory configuration - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 13
Application functions - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 14
Setup - Preliminary recommendations- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 18
Graphic display terminal- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 21
Description of terminal - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 21
Description of the graphic screen- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 22
First power-up - [5. LANGUAGE] menu- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 24
Subsequent power ups - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 25
Programming: Example of accessing a parameter - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 26
Quick navigation - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 27
Integrated display terminal - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 30
Functions of the display and the keys - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 30
Accessing menus - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 31
Accessing menu parameters - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 32
[2. ACCESS LEVEL] (LAC-) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 33
Structure of parameter tables - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 36
Interdependence of parameter values - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 37
Finding a parameter in this document - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 38
[1.1 SIMPLY START] (SIM-) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 39
[1.2 MONITORING] (SUP-) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 49
[1.3 SETTINGS] (SEt-) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 58
[1.4 MOTOR CONTROL] (drC-) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 73
[1.5 INPUTS / OUTPUTS CFG] (I-O-) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 104
[1.6 COMMAND] (CtL-) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 133
[1.7 APPLICATION FUNCT.] (FUn-) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 146
[1.8 FAULT MANAGEMENT] (FLt-) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 229
[1.9 COMMUNICATION] (COM-) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 252
[1.10 DIAGNOSTICS] - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 256
[1.12 FACTORY SETTINGS] (FCS-) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 260
[1.13 USER MENU] (USr-) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 264
[1.14 PROGRAMMABLE CARD] (PLC-) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 265
[3. OPEN/SAVE AS] - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 266
[4. PASSWORD] (COd-) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 268
[6 MONITORING CONFIG.] - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 270
[7 DISPLAY CONFIG.] - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 274
[MULTIPOINT SCREEN] - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 279
© 2010 Schneider Electric All Rights Reserved
3

Altivar® 71 Programming Guide 30072-452-92
Table of Contents 01/2010
Maintenance - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 280
Detected faults and troubleshooting - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 281
User settings tables - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 288
Index of functions - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 290
Index of parameter codes - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 292
© 2010 Schneider Electric All Rights Reserved4
30072-452-92 Altivar® 71 Programming Guide
DANGER
CAUTION
01/2010 Please Note
Please Note
The following symbols and special messages may appear in this manual or on the equipment to warn of potential hazards or to call
attention to information that clarifies or simplifies a procedure.
A lightning bolt or ANSI man symbol in a “Danger” or “Warning” safety label on the equipment indicates an electrical hazard which,
as indicated below, can or will result in personal injury if the instructions are not followed.
The exclamation point symbol in a safety message in a manual indicates potential personal injury hazards. Obey all safety
messages introduced by this symbol to avoid possible injury or death.
Symbol Name
Lightning Bolt
ANSI Man
Exclamation Point
DANGER indicates an imminently hazardous situation which, if not avoided, will result in death or serious injury.
WARNING
WARNING indicates a potentially hazardous situation which, if not avoided, can result in death or serious injury.
CAUTION indicates a potentially hazardous situation which, if not avoided, can result in minor or moderate injury.
CAUTION
CAUTION, used without the safety alert symbol, indicates a potentially hazardous situation which, if not avoided, can result in
property damage.
Electrical equipment should be installed, operated, serviced, and maintained only by qualified personnel. No responsibility is
assumed by Schneider Electric for any consequences arising out of the use of this material.
© 2010 Schneider Electric All Rights Reserved
5
Altivar® 71 Programming Guide 30072-452-92
r
DANGER
CAUTION
Before you begin 01/2010
Before you begin
Read and understand these instructions before performing any procedure on this drive.
HAZARD OF ELECTRIC SHOCK, EXPLOSION, OR ARC FLASH
• Read and understand this manual before installing or operating the Altivar
maintenance must be performed by qualified personnel.
• The user is responsible for compliance with all international and national electrical code requirements with respect to
grounding of all equipment.
• Many parts in this drive, including the printed circuit boards, operate at the line voltage. DO NOT TOUCH. Use only electrically
insulated tools.
• DO NOT touch unshielded components or terminal strip screw connections with voltage present.
• DO NOT short across PA/+ and PC/– or across the DC bus capacitors.
• Before servicing the drive:
— Disconnect all power, including external control power that may be present.
— Place a “DO NOT TURN ON” label on all power disconnects.
— Lock all power disconnects in the open position.
— WAIT 15 MINUTES to allow the DC bus capacitors to discharge. Then follow the "Bus voltage measurement" on page 18
to verify that the DC voltage is less than 42 V. The drive LED is not an indicator of the absence of DC bus voltage.
• Install and close all covers before applying power or starting and stopping the drive.
®
71 drive. Installation, adjustment, repair, and
a
Failure to follow these instructions will result in death or serious injury.
DAMAGED EQUIPMENT
Do not operate or install any drive that appears damaged.
Failure to follow these instructions can result in equipment damage.
WARNING
LOSS OF CONTROL FROM A COMMUNICATION INTERRUPTION
• The designer of any control scheme must consider the potential failure modes of control paths and, for certain critical control
functions, provide a means to achieve a safe state during and after a path failure. Examples of critical control functions are
emergency stop and overtravel stop.
• Separate or redundant control paths must be provided for critical control functions.
• System control paths may include communication links. Consideration must be given to the implications of unanticipated
transmission delays or failures of the link.
• Each implementation of an Altivar® 71 drive must be individually and thoroughly tested for proper operation before being
placed into service.
Failure to follow these instructions can result in death, serious injury, or equipment damage.
1. For additional information refer to NEMA ICS 1.1 (latest edition), “Safety Guidelines for the Application, Installation, and Maintenance of Solid State Control” and to
NEMA ICS 7.1 (latest edition), “Safety Standards for Construction and Guide for Selection, Installation and Operation of Adjustable-Speed Drive Systems.”
(1)
CAUTION
IMPROPER DRIVE OPERATION
• If the drive is not turned on for a long period, the performance of its electrolytic capacitors will be reduced.
• If the drive is stopped for a prolonged period, turn the drive on every two years for at least 5 hours to restore the performance
of the capacitors, then check its operation.
• Do not connect the drive directly to line voltage. Increase the voltage gradually using an adjustable AC source. If the drive is
not turned on for a long period, the performance of its electrolytic capacitors will be reduced.
Failure to follow these instructions can result in equipment damage.
a. The word “drive” as used in this bulletin refers to the controller portion of the adjustable speed drive as defined in the National Electrical Code (NEC).
© 2010 Schneide
Electric All Rights Reserved6

30072-452-92 Altivar® 71 Programming Guide
01/2010 Documentation structure
Documentation structure
The following Altivar® 71 (ATV 71) technical documents are available on the Schneider Electric website (www.schneider-electric.us), as
well as on the CD-ROM supplied with the drive.
Installation Manual
This describes how to assemble and connect the drive.
Programming Manual
This describes the functions, parameters and use of the drive terminal (integrated display terminal and graphic display terminal).
The communication functions are not described in this manual, but in the manual for the bus or network used.
Communication Parameters Manual
This manual describes:
• The drive parameters with specific information for use via a bus or communication network.
• The operating modes specific to communication (state chart).
• The interaction between communication and local control.
Manuals for Modbus®, CANopen, Ethernet, Profibus, INTERBUS®, Uni-Telway,
FIPIO
™, and Modbus® Plus.
These manuals describe the assembly, connection to the bus or network, signalling, diagnostics, and configuration of the communicationspecific parameters via the integrated display terminal or the graphic display terminal. They also describe the communication services of
the protocols.
Terminology
Technical terms, terminology and the corresponding descriptions in this manual are intended to use the terms or definitions of the pertinent
standards.
In the area of drive systems, this includes, but is not limited to, terms such as "fault", "fault reset", "failure", "error", "error message",
"warning", "warning message", "alarm", etc.
Among others, these standards include:
• IEC 61800 series: "Adjustable speed electrical power drive systems"
• IEC 61800-7 series: "Adjustable speed electrical power drive systems
- Part 7-1: "Generic interface and use of profiles for power drive systems - Interface definition"
• IEC 61158 series: "Industrial communication networks - Fieldbus specifications"
• IEC 61784 series: "Industrial communication networks - Profiles"
• IEC 61508 series: "Functional safety of electrical/electronic/programmable electronic safety-related systems"
© 2010 Schneider Electric All Rights Reserved
7

Altivar® 71 Programming Guide 30072-452-92
r
Software enhancements 01/2010
Software enhancements
Since the Altivar® 71 was first launched, it has benefited from the addition of several new functions. The software version has now been
updated to V2.8. The new version can be substituted to the previous versions without making any changes.
Although this documentation relates to version V2.8, it can still be used with previous versions, as the updates merely involves the addition
of new values and parameters. None of the previous versions parameters have been modified or removed.
The software version is indicated on the nameplate attached to the body of the drive.
Enhancements made to version V1.2 in comparison to V1.1
Factory setting
NOTE: In version V1.1, the analog input was 0 to ± 10 V. In the new version this input has been set to 0 to + 10 V.
In version V1.1, analog output AO1 was assigned to the motor frequency. In the new version, this output is not assigned at all.
With the exception of these two parameters, the factory settings of version V1.1 remain the same in the new version. The new
functions are factory-set to disabled.
Motor frequency range
The maximum output frequency has been extended from 1000 to 1600 Hz (depending on the drive rating and control profile).
New parameters and functions
Menu [1.2 MONITORING] (SUP-)
Addition of internal states and values relating to the new functions described below.
Menu [1.3 SETTINGS] (SEt-)
• [High torque thd.] (ttH), page 71.
• [Low torque thd.] (ttL), page 71.
• [Pulse warning thd.] (FqL), page 72.
• [Freewheel stop Thd.] (FFt), page72.
Menu [1.4 MOTOR CONTROL] (drC-)
• [rpm increment] (InSP), page 79.
• Extension of the following configurations to all drive ratings; previously limited to 45 kW (60 hp) for ATV71pppM3X and to 75 kW (100 hp)
for ATV71
reduction] (nrd), page 97, braking balance [Braking balance] (bbA), page 101.
pppN4:synchronous motor [Sync. mot.] (SYn), page 74, sinus filter [Sinus filter] (OFI), page 76, noise reduction [Noise
Menu [1.5 INPUTS / OUTPUTS CFG] (I-O-)
• Input Al1 can now be configured to 0 to +10 V or 0 to ± 10 V via [AI1 Type] (AI1t), page 110.
• [AI net. channel] (AIC1), page 114.
• New methods of assigning relays and logic outputs, page 121: rope slack, high torque threshold, low torque threshold, motor in forward
rotation, motor in reverse rotation, measured speed threshold reached, load variation detection.
• Analog output AO1 can now be used as a logic output and assigned to relay functions and logic outputs, page 126.
• New method of modifying the scale of analog outputs, page 128: using the parameters [Scaling AOx min] (ASLx) and
[Scaling AOx max] (ASHx).
• New methods of assigning logic outputs, page 129: signed motor torque and measured motor speed.
• New methods of assigning alarm groups, page 132: rope slack, high torque threshold, low torque threshold, measured speed threshold
reached, load variation detection.
© 2010 Schneide
Electric All Rights Reserved8

30072-452-92 Altivar® 71 Programming Guide
01/2010 Software enhancements
Software enhancements
Menu [1.7 APPLICATION FUNCT.] (Fun-)
• The summing, subtraction and multiplication reference functions can now be assigned to virtual input [Network AI] (AIU1), page 151.
• New parameter [Freewheel stop Thd.] (FFt), page 155 used to set a threshold for switching to freewheel at the end of a stop on ramp or
fast stop.
• Brake engage at regulated zero speed [Brake engage at 0] (bECd), page 174.
• Weight [Weight sensor ass.] (PES), page 181 can now be assigned to virtual input [Network AI] (AIU1).
• New rope slack function page 185, with the parameters [Rope slack config.] (rSd) and [Rope slack trq level] (rStL).
• Use of the ramp [Acceleration 2] (AC2), page 193 when starting and waking up the PID function.
• The torque limitation [TORQUE LIMITATION] (tOL-), page 200 can now be configured in whole % or in 0.1% increments using [Torque
increment] (IntP) and assigned to virtual input [Network AI] (AIU1).
• New stop at distance calculated after deceleration limit switch function page 208, with the parameters [Stop distance] (Std), [Rated linear
speed] (nLS) and [Stop corrector] (SFd).
• Positioning by sensors or limit switch [POSITIONING BY SENSORS] (LPO-), page 209 can now be configured in positive logic or negative
logic using [Stop limit config. (SAL) and [Slowdown limit cfg.] (dAL).
• Parameter set switching [PARAM. SET SWITCHING] (MLP-), page 212 can now be assigned to the frequency thresholds attained [Freq.
Th. att.] (FtA) and [Freq. Th. 2 attain.] (F2A).
• New half-floor: [HALF FLOOR] (HFF-) menu, page 226.
Menu [1.8 FAULT MANAGEMENT] (FLt)
• Possibility of reinitializing the drive without turning it off, via [Product reset] (rP), page 231.
• Possibility of reinitializing the drive via a logic input without turning it off, using [Product reset assig.] (rPA), page 231.
• The possibility of configuring the "output phase loss" fault [Output Phase Loss] (OPL), page 235 to [Output cut] (OAC) has been extended
to all drive ratings (previously limited to45 kW (60 hp) for ATV71pppM3X and 75 kW (100 hp) for ATV71pppN4).
• The external fault [EXTERNAL FAULT] (EtF-), page 238 can now be configured in positive or negative logic via [External fault config.]
(LEt).
• New monitoring function based on speed measurement via "Pulse input" page 245, via the [FREQUENCY METER] (FqF-) menu.
• New function for detecting load variation page 247, via the [DYNAMIC LOAD DETECT] (dLd-) menu.
• Short-circuit faults on the braking unit can now be configured via [Brake res. fault Mgt] (bUb), page 249.
Menu [7 DISPLAY CONFIG.]
In [7.4 KEYPAD PARAMETERS] page 278, the [KEYPAD CONTRAST] and [KEYPAD STAND-BY] parameters to adjust the contrast and
stand-by mode of the graphic display unit.
Enhancements made to version V1.3 (S383) in comparison to V1.2
New parameters and functions
Menu [1.4 MOTOR CONTROL] (drC-)
New option of operating with Closed-loop synchronous motor page 85
• [Angle auto-test] (ASA), page 86
• [Angle offset value] (ASU), page 87
• [Sync.CL] (FSY) assignment page 75 of parameter [Motor control type] (Ctt)
Menu [1.5 INPUTS / OUTPUTS CFG] (I-O-)
• [Resolver Exct. Freq.] (FrES) and [Resolver poles nbr] (rPPn), page 118
Menu [1.7 APPLICATION FUNCT.] (Fun-)
•New "Inspection" function, page 224, with [Inspection] (ISP) and [Inspection speed] (ISrF) parameters.
Enhancements made to version V1.7 (S383) in comparison to V1.3 (S383)
New parameters and functions
Menu [1.1 SIMPLY START] (SIM-)
• Addition of a [Lift] (LIFt) macro configuration to the [Macro configuration] (CFG) parameter page 45
Menu [1.3 SETTINGS] (SEt-)
New parameters:
• [Fr.Loop.Stab] (StA), page 60
• [FreqLoopGain] (FLG), page 60
© 2010 Schneider Electric All Rights Reserved
9

Altivar® 71 Programming Guide 30072-452-92
r
Software enhancements 01/2010
Menu [1.4 MOTOR CONTROL] (drC-)
This menu has been reorganized with parameters now appearing in a different order and some grouped under submenus to simplify
configuration.
The new submenus are as follows:
• [ENCODER FEEDBACK] (EnS-), page 78
• [ASYNC. MOTOR] (ASY-), page 79
• [SYNCHRONOUS MOTOR] (SYn-), page 83
• [ANGLE TEST SETTING] (ASA-), page 86
• [FLUXING BY LI] (FLI-), page 88
• [AUTOMATIC TUNE] (tUn-), page 89
• [SPEED LOOP] (SSL-), page 92
New parameters:
• [Boost] (bOO), page 97
• [Action Boost] (FAb), page 97
• [Increment EMF] (IPHS), page 83
• [Read motor param.] (rEqP), page 84
• [Status motor param] (rEtP), page 84
• [Angle setting type] (ASt), pages 86 and 89
• [Angle auto test] (ASL), page 87
• [Angle setting activ.] (AtA), page 87
• [Angle setting status] (AStS), page 87
• [Speed loop type] (SSL), page 92
• [Inertia Mult. Coef.] (JMUL), page 92
• [Estim. app. inertia] (JESt), page 92
• [Application Inertia] (JAPL), page 93
• [Fr.Loop.Stab] (StA), page 93
• [FreqLoopGain] (FLG), page 93
• [Feed forward] (FFP), page 93
• [Bandwidth feedfor.] (FFU), page 93
Parameters moved from menu [1.7 APPLICATION FUNCT.] (Fun-):
• [Motor fluxing] (FLU), page 88
• [Fluxing assignment] (FLI), page 88
• [Auto-tune assign.] (tUL), page 91
Menu [1.5 INPUTS / OUTPUTS CFG] (I-O-)
New encoder parameters:
• [Encoder protocol] (UECP), page 119
• [Encoder supply volt.] (UECU), page 119
• [Sincos lines count] (UELC), page 119
• [SSI parity] (SSCP), page 119
• [SSI frame size] (SSFS), page 119
• [Nbr of revolution] (EnMr), page 119
• [Turn bit resolution] (Entr), page 119
• [SSI code type] (SSCd), page 120
• [Encoder filter activ.] (FFA), page 120
• [Encoder filter value] (FFr), page 120
Menu [1.7 APPLICATION FUNCT.] (Fun-)
Removal of the following parameters (now located in the [1.4 MOTOR CONTROL] (drC-) menu):
• [Motor fluxing] (FLU)
• [Fluxing assignment] (FLI)
• [Auto-tune assign.] (tUL)
© 2010 Schneide
Electric All Rights Reserved10

30072-452-92 Altivar® 71 Programming Guide
01/2010 Software enhancements
Enhancements made to version V1.9 (S383) in comparison to V1.7 (S383)
New parameters and functions
Menu [1.4 MOTOR CONTROL] (drC-)
• New method of assigning [Angle setting type] (ASt), page 89 : optimized measurement (without motion with memorization).
New parameter :
• [App. Inertia Coef.] (JACO), page 92.
Removal from the sub-menu [ASYNC. MOTOR] (ASY-) of the following parameters (now located directly in the
MOTOR CONTROL] (drC-) menu):
[1.4
• [Boost] (bOO), page 97.
• [Action Boost] (FAb), page 97.
Menu [1.5 INPUTS / OUTPUTS CFG] (I-O-)
New encoder parameters:
• [Coder rotation inv.] (EnrI), page 117.
• [Clock frequency] (EnSP), page 120.
Menu [1.7 APPLICATION FUNCT.] (Fun-)
• New method of assigning for the parameters set switching [2 Parameter sets] (CHA1), page 212 and [3 Parameter sets] (CHA2),
page 212 : switching during braking sequence. This new assignment allows to put higher gain when the brake is open and before the
starting of the ramp (useful for lift application).
New sub-menu:
• [TOP Z MANAGEMENT] (tOP-), page 228 (the parameter can be accessed only if an encoder card VW 3A 411 has been inserted and if
[Encoder type] (EnS) = [AABB] (AAbb).
New encoder parameter:
• [Stop on top Z] (tOSt), page 228.
Enhancements made to version V2.4 (S383) in comparison to V1.9 (S383)
New parameters and function
Menu [1.7 APPLICATION FUNCT.] (Fun-)
New sub-menu:
• [ROLLBACK MGT] (rbM-), page 179. Menu can be accessed:
- only for ATV71pppM3X drives up to 45 kW and for ATV71pppN4 drives up to 75 kW,
- if [Motor control type] (Ctt), page 74 = [Sync.CL] (FSY) or [FVC] (FUC),
- if [Brake assignment] (bLC), page 173 is assigned.
New parameter of [ROLLBACK MGT] function:
• [Rollback MGT] (rbM), page 179.
• [Rbk Compensation] (rbC), page 179.
• [Rbk Damping] (rbd), page 179.
Enhancements made to version V2.8 (S383) in comparison to V2.4 (S383)
Menu Menu [1.7 APPLICATION FUNCT.] (FUn-)
• The adjustment range [Time to restart] (ttr), page 175 can now be configured to 0 to 15.00 s.
Menu [7 DISPLAY CONFIG.]
• Addition in [7.4 KEYPAD PARAMETERS] page 278 parameter [Power up menu] to choose the menu displayed on the drive
on power up.
© 2010 Schneider Electric All Rights Reserved
11
Altivar® 71 Programming Guide 30072-452-92
r
INSTALLATION
v 1 Consult the Installation Manual
PROGRAMMING
Procedure applicable if the factory configuration, page 13, and use of the
[SIMPLY START] (SIM-) menu only are sufficient for the application.
b 2 Power up without run command
v If you are using a separate power
supply for the control section, follow
the instructions on page 19.
b 3 Select the language, if the drive
has a graphic display terminal
b 4 Configure the [SIMPLY START]
(SIM-)
menu
v 2-wire or 3-wire control
v Macro configuration
v Motor parameters
Perform an auto-tuning operation
v Motor thermal current
v Acceleration and deceleration
ramps
v Speed variation range
Tips:
• Before you start programming, complete the user
setting tables, page 288.
• Perform an auto-tuning operation to optimize
performance, page 47.
• If you get lost, return to the factory settings,
page 262.
NOTE: Check that the wiring of the
drive is compatible with its configuration.
b 5 Start
Steps for setting up 01/2010
Steps for setting up
© 2010 Schneide
Electric All Rights Reserved12
30072-452-92 Altivar® 71 Programming Guide
01/2010 Factory configuration
Factory configuration
Drive factory settings
The Altivar® 71 is factory-set for the most common operating conditions:
• Macro configuration: Start/Stop
• Motor frequency: 50 Hz
• Constant torque application with asynchronous motor and sensorless flux vector control
• Normal stop mode on deceleration ramp
• Stop mode in the event of a fault: freewheel
• Linear, acceleration and deceleration ramps: 3 seconds
• Low speed: 0 Hz
• High speed: 50 Hz
• Motor thermal current = rated drive current
• Standstill injection braking current = 0.7 x rated drive current, for 0.5 seconds
• No automatic starts after a fault
• Switching frequency 2.5 kHz or 4 kHz depending on drive rating
• Logic inputs:
- LI1: forward, LI2: Forward (2 operating direction), 2-wire control on transition
- L13, L14, LI5, LI6: inactive (not assigned)
• Analog inputs:
- AI1: speed reference 0-+10 V
- AI2: 0-20 mA, inactive (not assigned)
• Relay R1: The contact opens in the event of a fault (or drive off).
• Relay R2: Inactive (not assigned)
• Analog output AO1: 0-20 mA, inactive (not assigned)
If the above values are compatible with the application, the drive can be used without changing the settings.
Option card factory settings
The option card inputs/outputs are not factory-set.
© 2010 Schneider Electric All Rights Reserved
13
Altivar® 71 Programming Guide 30072-452-92
r
Application functions 01/2010
Application functions
The tables on pages 14 through 17 list the most common combinations of functions and applications, in order to guide your selection.
The applications in these tables relate to the following machines in particular:
• Hoisting: cranes, overhead cranes, gantries (vertical hoisting, translation, slewing), lifting platforms
• Elevators: elevators in retrofit up to 1.2 m/s
• Handling: palletizers/depalletizers, conveyors, roller tables
• Packing: carton packers, labeling machines
• Textiles: weaving looms, carding frames, washing machines, spinners, drawing frames
• Wood: automatic lathes, saws, milling
• High inertia: centrifuges, mixers, unbalanced machines (beam pumps, presses)
• Process
Each machine has its own special features, and the combinations listed here are neither mandatory nor exhaustive.
Some functions are designed specifically for a particular application. In this case, the application is identified by a tab in the margin on the
relevant programming pages.
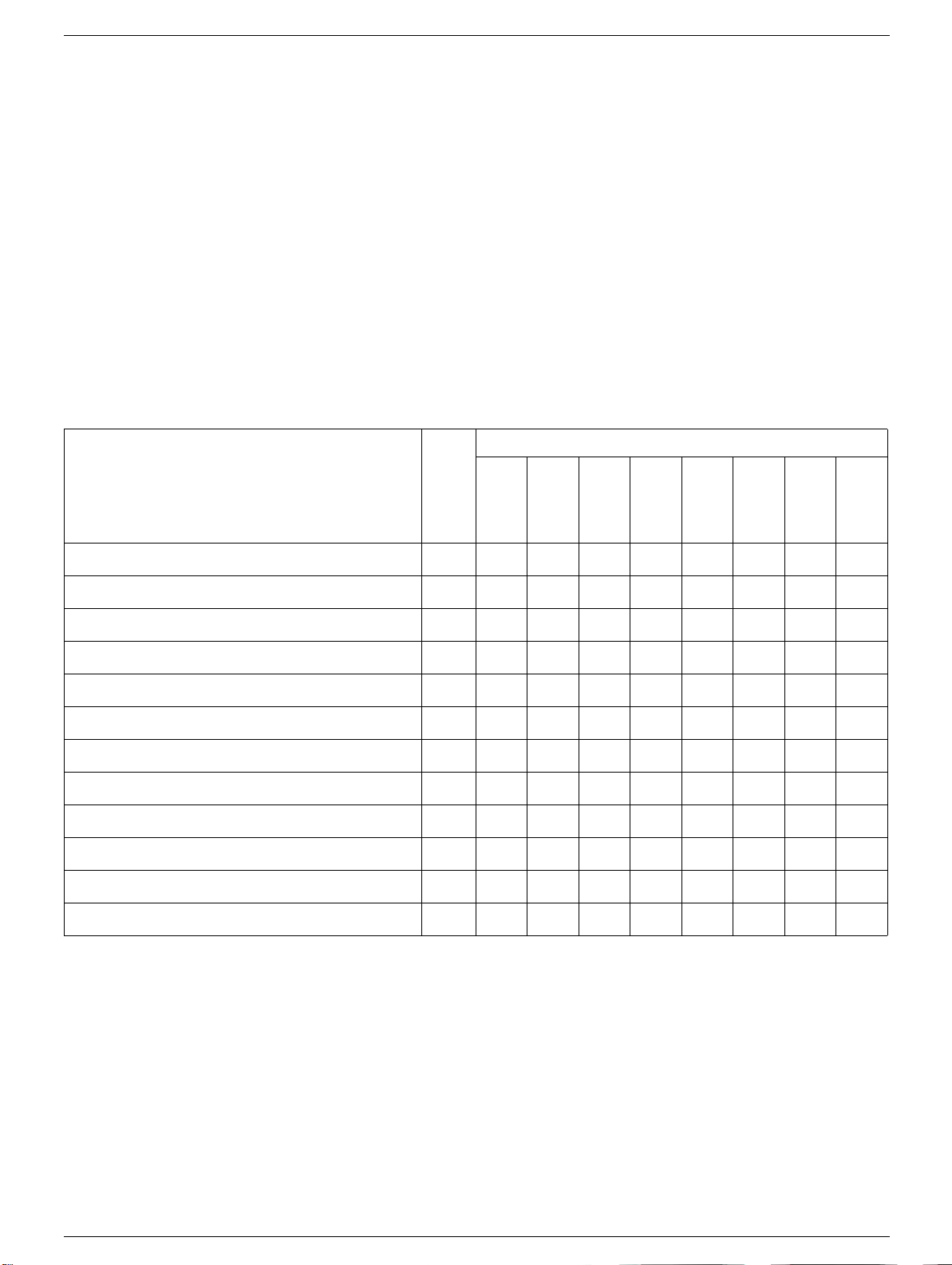
Motor control functions
Applications
Functions Page
V/f ratio
Sensorless flux vector control
Flux vector control with sensor
2-point vector control
Open-loop synchronous motor
Closed-loop synchronous motor
Output frequency of up to 1600 Hz
Motor overvoltage limiting
DC bus connection (see User's Manual)
Motor fluxing using a logic input
Switching frequency of up to 16 kHz
Auto-tuning
74
74
74
74
75
75
79
98
—
88
76
89
Hoisting
Lifts
Handling
Packin
Textiles
Wood
High inertia
Process
bbb
bbbbbbbb
bbbbbbbb
bb
b
bbb
bb
bb
bb
bbb
bbb
bbbbbbbb
© 2010 Schneide
Electric All Rights Reserved14
30072-452-92 Altivar® 71 Programming Guide
01/2010 Application functions
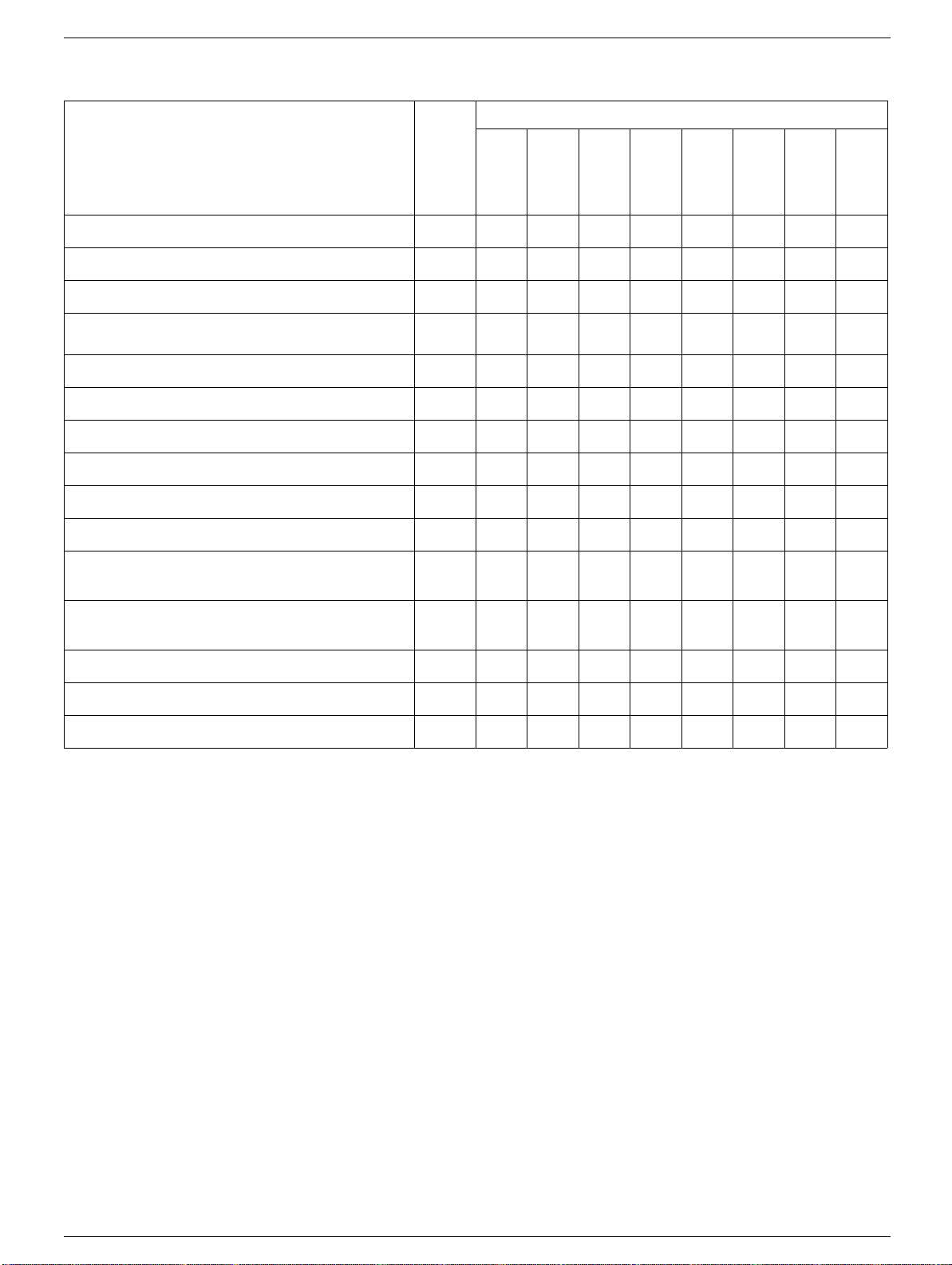
Functions on speed references
Applications
Functions Page
Differential bipolar reference
Reference delinearization (magnifying glass effect)
Frequency control input
Reference switching
Reference summing
Reference subtraction
Reference multiplication
S ramps
Jog operation
Preset speeds
+ speed/- speed using single action pushbuttons
(1 step)
+ speed/- speed using double action pushbuttons
(2 steps)
Hoisting
107 b b b
109 b b
142 b b
143–
150
150 b
150 b
150 b
152 b b b
159 b b b
160 b b b b b
163 b
163 b
Lifts
Handling
b
Packing
Textiles
Wood
High inertia
Process
+/- speed around a reference
Save reference
Inspection
165 b b
167 b
224 b
© 2010 Schneider Electric All Rights Reserved
15
Altivar® 71 Programming Guide 30072-452-92
r
Application functions 01/2010
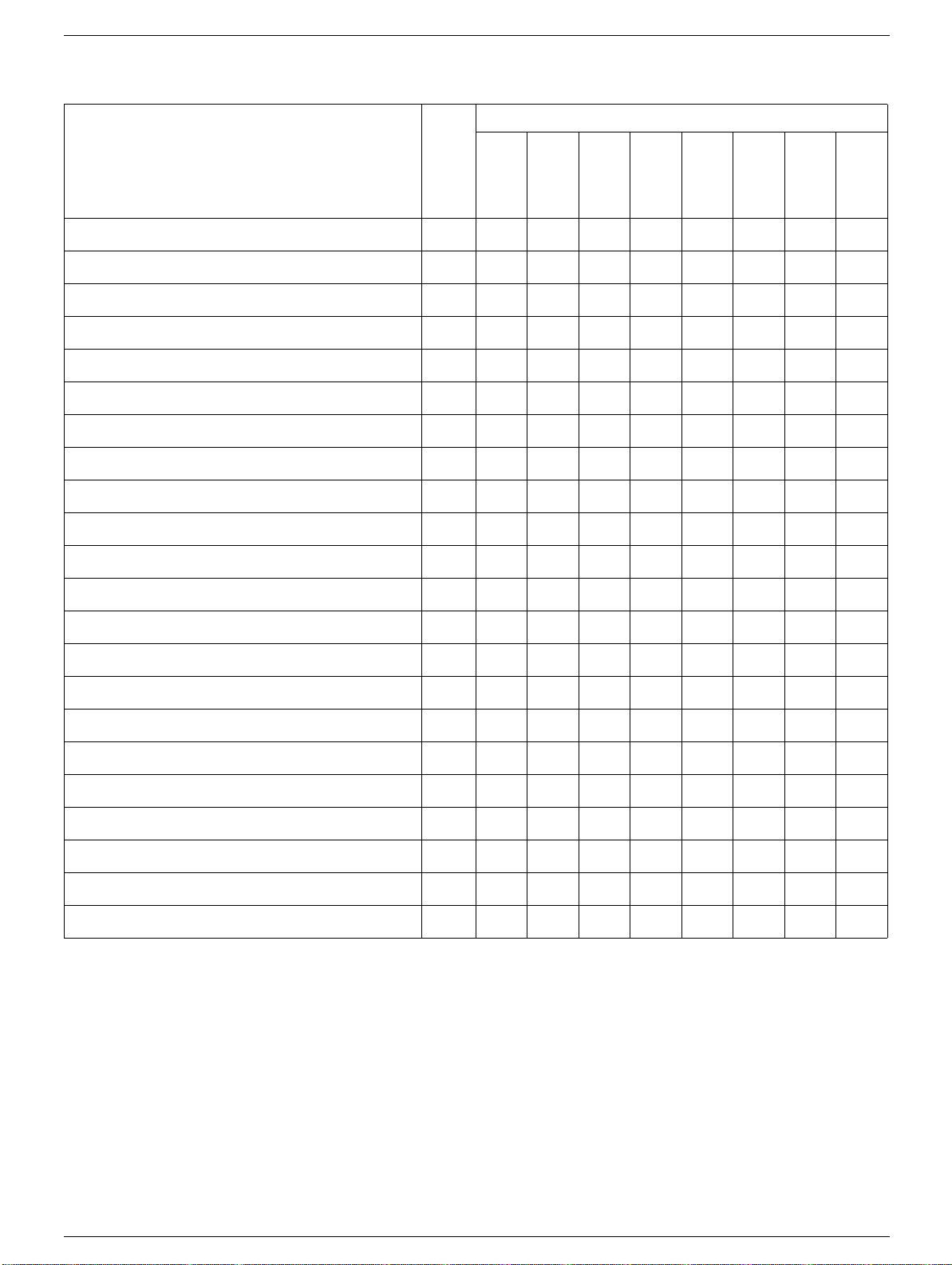
Application-specific functions
Applications
Functions Page
Fast stop
Limit switch management
Brake control
Load measurement
High-speed hoisting
Rope slack
PID regulator
Torque monitoring
Motor/generator torque limit
Load sharing
Line contactor control
Output contactor control
Positioning by limit switches or sensors
Stop at distance calculated after deceleration limit switch
Hoisting
155 b b
168 b b b
169 b b b
180 b b
182 b
185 b
187 b
196 b b b
199 b b b b
101 b b
202 b b b
204 b
206 b b
208 b b
Lifts
Handling
Packing
Textiles
Wood
High inertia
Process
ENA system (mechanical with unbalanced load)
Parameter switching
Motor or configuration switching
Traverse control
Stop configuration
Evacuation
Half floor
Rollback management
96 b
211 b b b b b b b b
214 b b b
217 b
155 b b b b
225 b
226 b
179 b
© 2010 Schneide
Electric All Rights Reserved16
30072-452-92 Altivar® 71 Programming Guide
01/2010 Application functions
Safety functions/fault management
Applications
Functions Page
Power Removal (safety function, see User's Manual)
Deferred stop on thermal alarm
Alarm handling
Fault management
IGBT tests
Catch a spinning load
Braking resistor thermal protection
Motor protection with PTC probes
Undervoltage management
4-20mA loss
Uncontrolled output cut (output phase loss)
Automatic restart
Use of the "Pulse input" input to measure the speed
of rotation of the motor
Hoisting
— b b b b b b b b
237 b
132 b b b b b b b b
230 – 251 b b b b b b b b
240 b b b b b b b b
232 b b b
249 b b b b
230 b b b b b b b b
239 b b b
241 b b b b b b
235 b
231 b
245 b b b
Lifts
Handling
Packing
Textiles
Wood
High inertia
Process
Load variation detection
247 b
© 2010 Schneider Electric All Rights Reserved
17
Altivar® 71 Programming Guide 30072-452-92
r
DANGER
DANGER
Setup - Preliminary recommendations 01/2010
Setup - Preliminary recommendations
Bus voltage measurement
HAZARD OF ELECTRIC SHOCK, EXPLOSION, OR ARC FLASH
Read and understand the precautions in “Before you begin” starting on page 6 before performing this procedure.
Failure to follow these instructions will result in death or serious injury.
The DC bus voltage can exceed 1,000 Vdc. Use a properly rated voltage-sensing device when performing this procedure. To
measure the DC bus voltage:
1. Disconnect all power.
2. Wait 15 minutes to allow the DC bus to discharge.
3. Measure the voltage of the DC bus between the PA/+ and PC/– terminals to ensure that the voltage is less than 42 Vdc. These
terminals are clearly labeled on each drive.
4. If the DC bus capacitors do not discharge completely, contact your local Schneider Electric representative. Do not repair or operate the
drive.
Turning on and configuring the drive
UNINTENDED EQUIPMENT OPERATION
• Before turning on and configuring the Altivar
in order to prevent unintended operation.
• Before turning on the drive, or when exiting the configuration menus, check that the inputs assigned to the run command are
deactivated (at state 0) since they can cause the motor to start immediately.
Failure to follow these instructions will result in death or serious injury.
®
71, check that the PWR (POWER REMOVAL) input is deactivated (at state 0)
CAUTION
INCOMPATIBLE LINE VOLTAGE
Before turning on and configuring the drive, ensure that the line voltage is compatible with the supply voltage range shown on
the drive nameplate. The drive may be damaged if the line voltage is not compatible.
Failure to follow these instructions can result in equipment damage.
© 2010 Schneide
Electric All Rights Reserved18
30072-452-92 Altivar® 71 Programming Guide
DANGER
01/2010 Setup - Preliminary recommendations
Separate control section power supply
When the drive control section is powered independently of the power section (P24 and 0V terminals), whenever an option card is added
or replaced, only the power section must be supplied with power next time the drive is powered up.
By default the new card would not be recognized and it would be impossible to configure it, thereby causing the drive to lock in fault mode.
Power switching via line contactor
CAUTION
EQUIPMENT DAMAGE
• Avoid operating the contactor frequently (premature aging of the filter capacitors).
• Cycle times < 60 s may result in damage to the pre-charge resistor.
Failure to follow these instructions can result in equipment damage.
User adjustment and extension of functions
• The display unit and buttons can be used to modify the settings and to extend the functions described in the following pages.
• Return to factory settings is made easy by the [1.12 FACTORY SETTINGS] (FCS-) menu, see page 260.
• There are three types of parameters:
- Display: Values displayed by the drive
- Adjustment: Can be changed during operation or when stopped
- Configuration: Can only be modified when stopped and no braking is taking place. Can be displayed during operation.
UNINTENDED EQUIPMENT OPERATION
• Verify that changes made to the settings during operation do not present any danger.
• We recommend stopping the drive before making any changes.
Failure to follow these instructions will result in death or serious injury.
© 2010 Schneider Electric All Rights Reserved
19
Altivar® 71 Programming Guide 30072-452-92
r
Setup - Preliminary recommendations 01/2010
Starting
Important:
• In factory settings mode, the motor can only be supplied with power once the “forward”, “reverse” and “DC injection stop” commands have
been reset:
- On power-up or a manual fault reset or after a stop command
If they have not been reset, the drive will display "nSt" but will not start.
• If the automatic restart function has been configured ([Automatic restart] (Atr) parameter in the [1.8-FAULT MANAGEMENT] (FLt-) menu,
see page
231), these commands are taken into account without a reset being necessary.
Test on a low power motor or without a motor
• In factory settings mode, [Output Phase Loss] (OPL) detection page 235 is active (OPL = YES). To check the drive in a test or
maintenance environment without having to switch to a motor with the same rating as the drive (particularly useful in the case of high
power drives), deactivate [Output Phase Loss] (OPL = no).
• Configure [Motor control type] (Ctt) = [V/F 2pts] (UF2) or [V/F 5pts] (UF5) ([1.4-MOTOR CONTROL] (drC-) menu, see page 74).
CAUTION
LOSS OF THERMAL PROTECTION FEATURES
Motor thermal protection will not be provided by the drive if the motor current is less than 0.2 times the rated drive current. Provide an
alternative means of thermal protection.
Failure to follow these instructions can result in equipment damage.
Using motors in parallel
• Configure [Motor control type] (Ctt) = [V/F 2pts] (UF2) or [V/F 5pts] (UF5) ([1.4-MOTOR CONTROL] (drC-) menu, see page 74)
CAUTION
LOSS OF THERMAL PROTECTION FEATURES
Motor thermal protection is no longer provided by the drive. Provide an alternative means of thermal protection on every motor.
Failure to follow these instructions can result in equipment damage.
© 2010 Schneide
Electric All Rights Reserved20
30072-452-92 Altivar® 71 Programming Guide
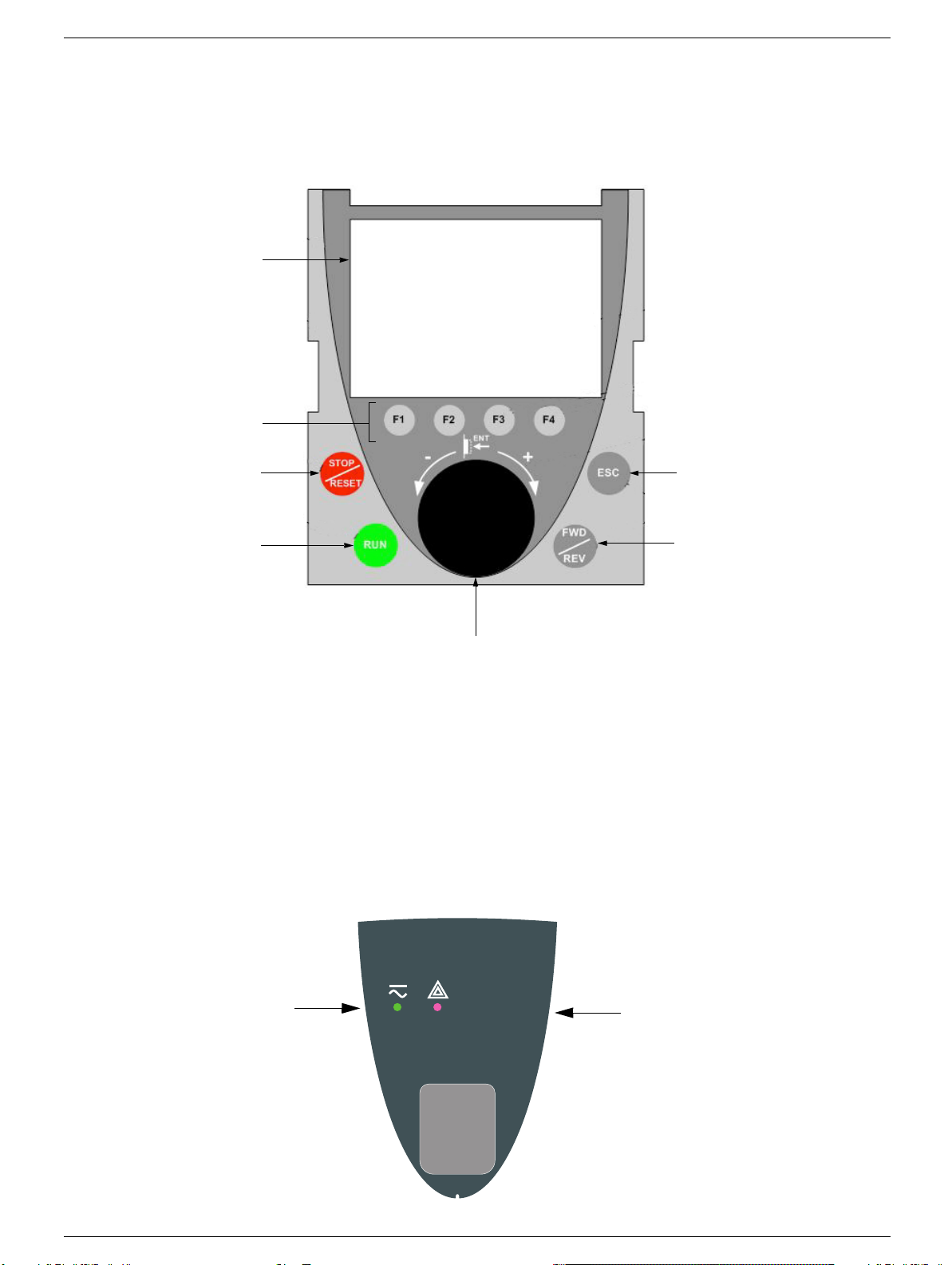
1 Graphic display
2 Function keys
F1, F2, F3, F4,
see page 22.
3 STOP/RESET
button
4 RUN button
5 Navigation button:
• Press (ENT): - To save the current value
- To enter the selected menu or parameter
• Turn CW/CCW: - To increment or decrement a value
- To go to the next or previous line
- To increase or decrease the reference if control via the
terminal is activated
7 ESC key: Aborts a value, a
parameter or a menu to return to
the previous selection
6 Button for reversing the direction
of rotation of the motor
HMI Modbus
Green LED:
DC bus ON
Red LED:
Fault
01/2010 Graphic display terminal
Graphic display terminal
The graphic display terminal can be disconnected and connected remotely (on the door of an enclosure for example) using the cables and
accessories available as options.
Description of terminal
NOTE: Buttons 3, 4, 5 and 6 can be used to control the drive directly, if control via the terminal is activated.
Disconnected terminal
When the terminal is disconnected, 2 LEDs become visible:
© 2010 Schneider Electric All Rights Reserved
21
Altivar® 71 Programming Guide 30072-452-92
r
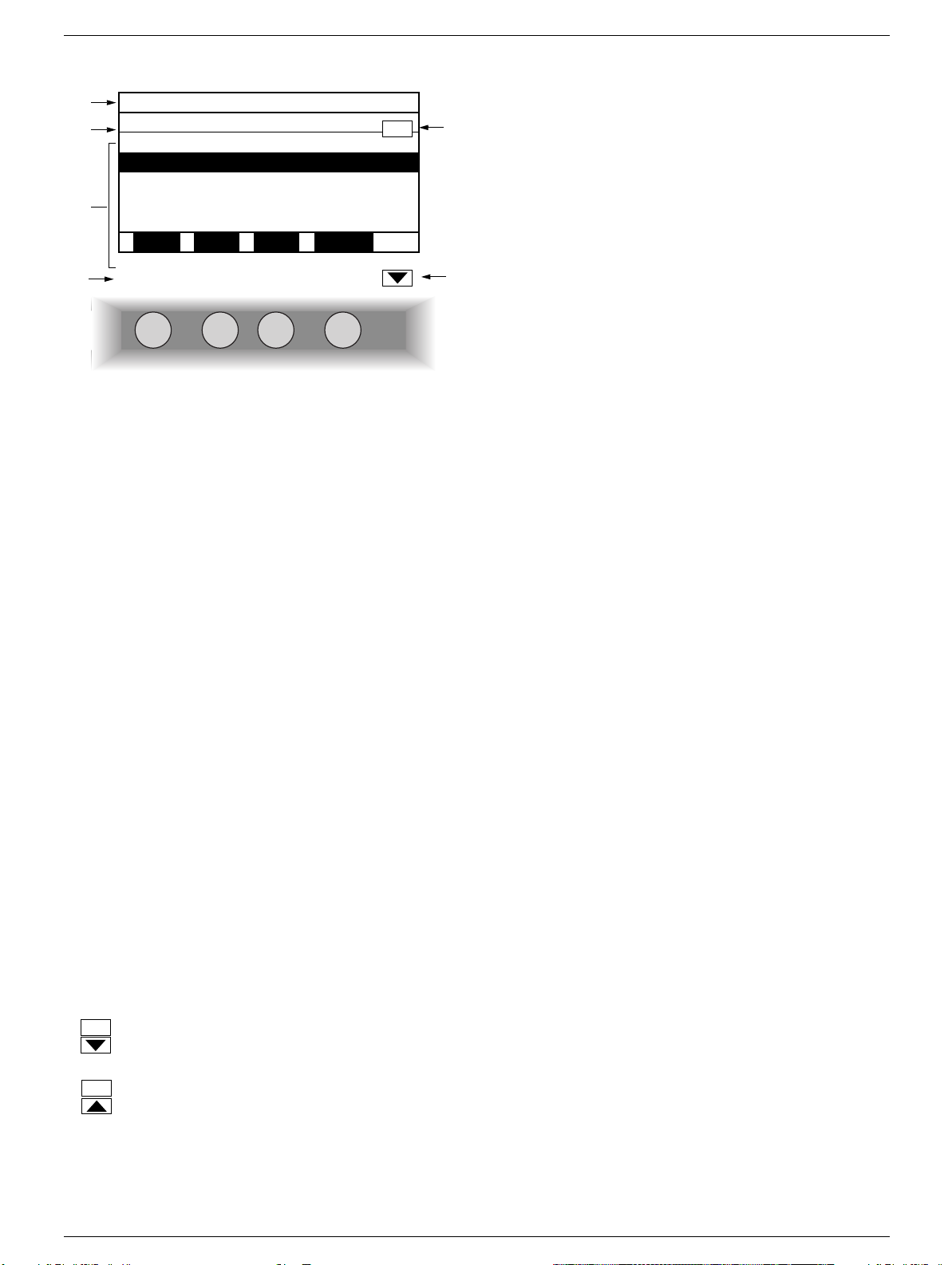
F1 F2 F3 F4
RDY Term +0.00 Hz 0A
1 DRIVE MENU
1.1 SIMPLY START
1.2 MONITORING
1.3 SETTINGS
1.4 MOTOR CONTROL
1.5 INPUTS / OUTPUTS CFG
Code
<< >> Quick
1
2
3
4
6
5
• Code F1
•HELP F1
• << F2
• >> F3
•Quick F4
Graphic display terminal 01/2010
Description of the graphic screen
1 Display line. Its content can be configured; the factory settings show:
• The drive state (see page 23)
• The active control channel:
-Term: Terminals
- HMI: Graphic display terminal
- MDB: Integrated Modbus
- CAN: Integrated CANopen
- NET: Communication card
- APP: Controller Inside card
• Frequency reference
• Current in the motor
2 Menu line. Indicates the name of the current menu or submenu.
3 Menus, submenus, parameters, values, bar charts, etc., are displayed in drop-down window format on a maximum of 5 lines.
The line or value selected by the navigation button is displayed in reverse video.
4 Section displaying the functions assigned to the F1 to F4 keys and aligned with them, for example:
: Displays the code of the selected parameter, such as, the code corresponding to the 7-segment display.
: Contextual help
: Navigate horizontally to the left, or go to previous menu/submenu or, for a value, go to the next digit up, displayed
in reverse video (see the example on page
23).
: Navigate horizontally to the right or go to next menu/submenu (going to the [2 ACCESS LEVEL] menu in this
example) or, for a value, go to the next digit down, displayed in reverse video (see the example on page
: Quick navigation, see page 27.
23).
The function keys are dynamic and contextual.
Other functions (application functions) can be assigned to these keys via the [1.6 COMMAND] menu.
If a preset speed is assigned to a function key and if the function key is pressed, the motor will run at this preset speed until another preset
speed or JOG is pressed, speed reference is changed, or Stop key is pressed.
5 Indicates that there are no more levels below this display window.
Indicates that there are more levels below this display window.
6 Indicates that this display window does not scroll further up.
Indicates that there are more levels above this display window.
© 2010 Schneide
Electric All Rights Reserved22
30072-452-92 Altivar® 71 Programming Guide
RD Y Te rm +0 .00 Hz 0A
5 LANGUAGE
English
Français
Deutsch
Español
Italiano
<< >> Quick
Chinese
PARAMETER SELECTION
1.3 SETTINGS
Ramp increment
Acceleration
Deceleration
Acceleration 2
Deceleration 2
Edit
>>
01/2010 Graphic display terminal
Drive state codes:
- ACC: Acceleration
- CLI: Current limit
- CTL: Controlled stop on input phase loss
- DCB: DC injection braking in progress
-DEC: Deceleration
- FLU: Motor fluxing in progress
- FST: Fast stop
- NLP: No line power (no line supply on L1, L2, L3)
- NST: Freewheel stop
- OBR: Auto-adapted deceleration
- PRA: Power Removal function active (drive locked)
- RDY: Drive ready
- RUN: Drive running
- SOC: Controlled output cut in progress
- TUN: Auto-tuning in progress
- USA: Undervoltage alarm
- ASA: Measurement of the phase-shift angle in progress
- ICC: Configuration encoder incorrect
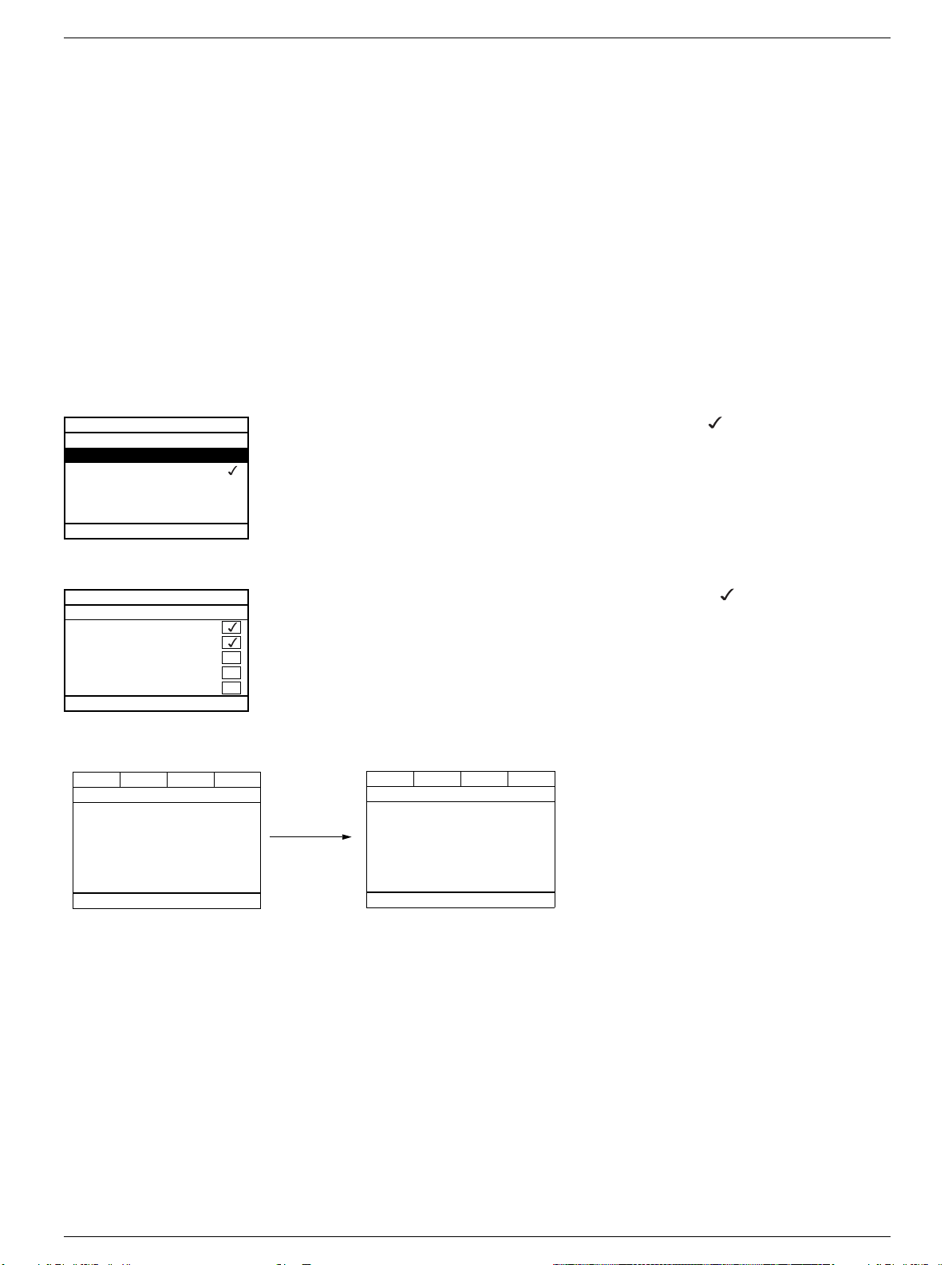
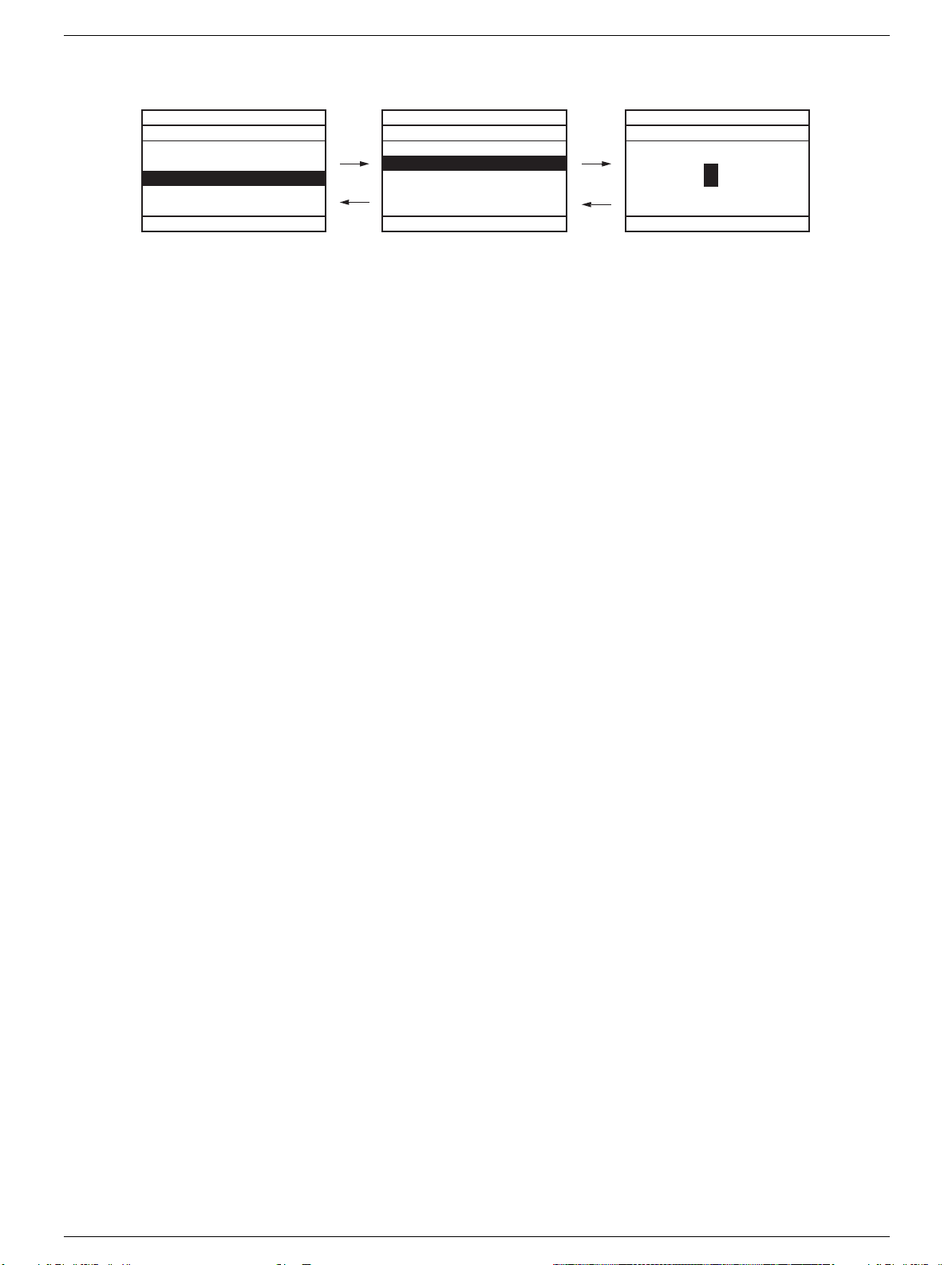
Example configuration windows:
When only one selection is possible, the selection made is indicated by
Example: Only one language can be chosen.
When multiple selection is possible, the selections made are indicated by
Example: A number of parameters can be chosen to form the [USER MENU].
Example configuration window for one value:
RDY Term +0.00Hz 0A
Acceleration
9. 51 s
Min = 0.01 Max = 99.99
<< >> Quick
The << and >> arrows (keys F2 and F3) are used to select the digit to be modified, and the navigation button is rotated to increase or
decrease this number.
RDY Term +0.00Hz 0A
Acceleration
9 51 s
Min = 0.01 Max = 99.99
<< >> Quick
© 2010 Schneider Electric All Rights Reserved
23
Altivar® 71 Programming Guide 30072-452-92
r
ATV71HU22N4383
2.2kW/3HP 380/480V
Config. n°1
5 LANGUAGE
English
Français
Deutsch
Español
Italiano
Chinese
RD Y Te rm +0 .00 Hz 0. 0A
2 ACCESS LEVEL
Basic
Standard
Advanced
Expert
RD Y Te rm +0 .00 Hz 0. 0A
1 DRIVE MENU
1.1 SIMPLY START
1.2. MONITORING
1.3. SETTINGS
1.4. MOTOR CONTROL
1.5. INPUTS / OUTPUTS CFG
Code << >> Quick
RD Y Te rm +0 .00 Hz 0. 0A
MAIN MENU
1 DRIVE MENU
2 ACCESS LEVEL
3 OPEN / SAVE AS
4 PASSWORD
5 LANGUAGE
Code Quick
Graphic display terminal 01/2010
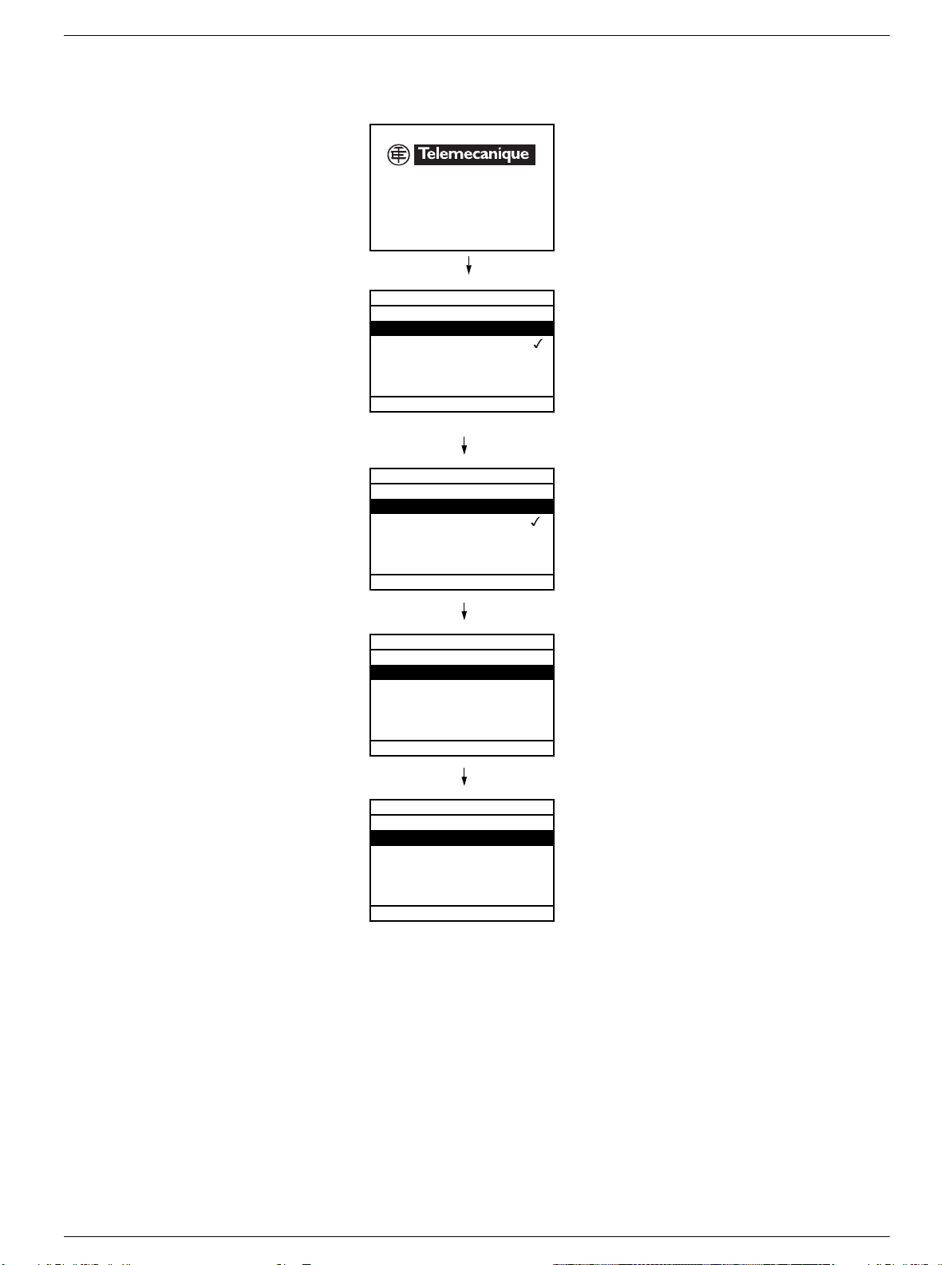
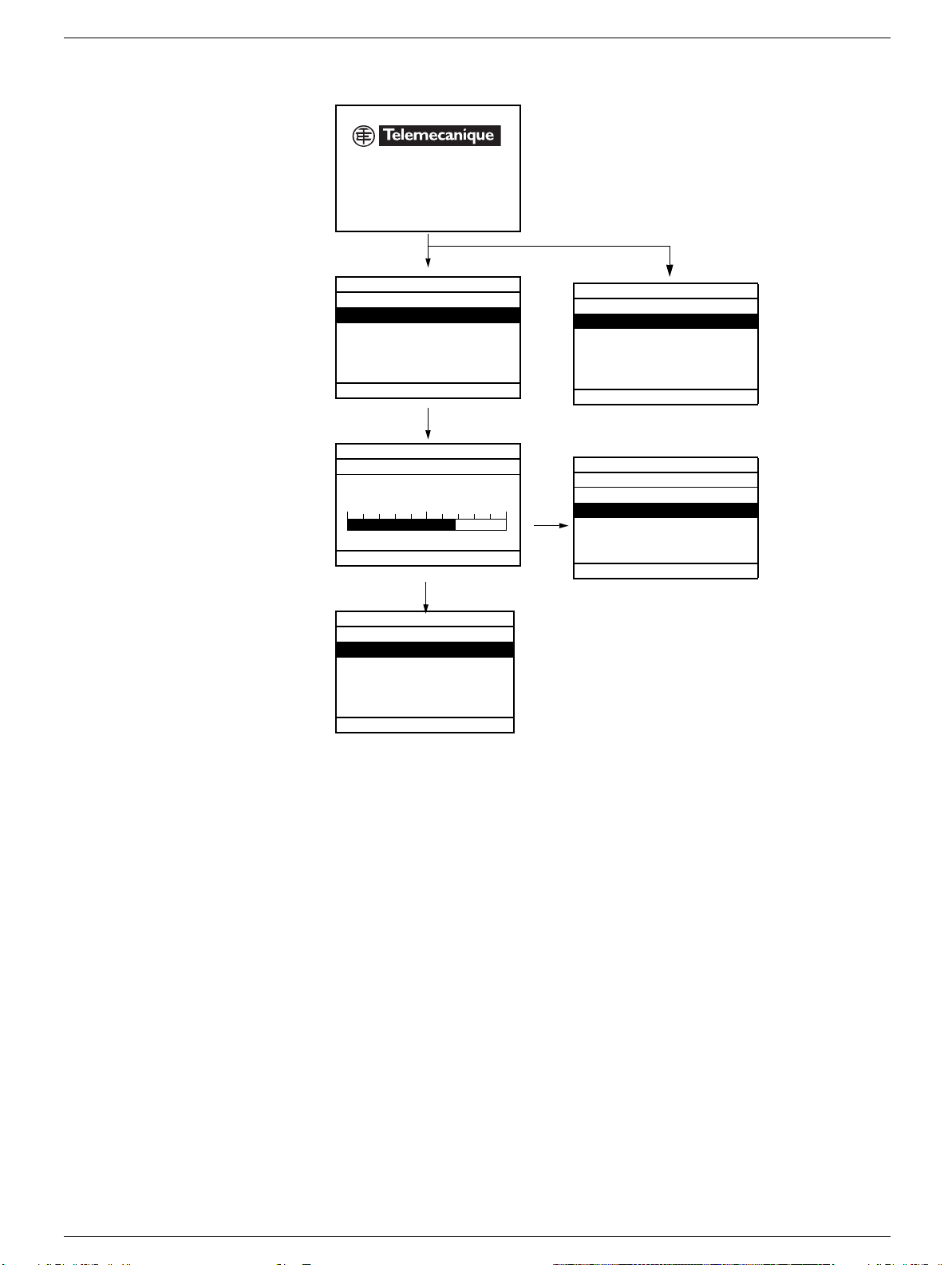
First power-up - [5. LANGUAGE] menu
The first time the drive is powered up, the user will automatically be guided through the menus as far as [1. DRIVE MENU].
The parameters in the [1.1 SIMPLY START] submenu must be configured and auto-tuning performed before the motor is started up.
Display for 3 seconds following power-up
3 seconds
Automatically switches to [5 LANGUAGE]
menu 3 seconds later.
Select the language and press ENT.
ESC
Switches to [2 ACCESS LEVEL] menu
(see page 33)
Select the access level and press ENT.
Switches to [1 DRIVE MENU]
(see page 29)
Press ESC to return to [MAIN MENU]
© 2010 Schneide
Electric All Rights Reserved24
30072-452-92 Altivar® 71 Programming Guide
3 seconds later, switches to
[1. DRIVE MENU] or to
[1.14 PROGRAMMABLE CARD].
If no operator inputs are made,
switches to "Display" automatically
10 seconds later (the display will
vary depending on the selected
configuration).
Users can return to [MAIN MENU]
by pressing ENT or ESC.
3 seconds
10 seconds
ESC or ESC
ATV71HU22N4383
2.2kW/3HP 380/480V
Config. n°1
RD Y Te rm +3 8Hz 0A
1. DRIVE MENU
1.1 SIMPLY START
1.2 MONITORING
1.3 SETTINGS
1.4 MOTOR CONTROL
1.5 INPUTS / OUTPUTS CFG
Code << >> Quick
RD Y Te rm +3 8Hz 0A
Frequency ref.
Min=0 Max=60
Quick
RD Y T er m + 38 Hz 0A
MAIN MENU
1 DRIVE MENU
2 ACCESS LEVEL
3 OPEN / SAVE AS
4 PASSWORD
5 LANGUAGE
Code Quick
38 Hz
RD Y Te rm +0 .00 Hz 0A
1.14 PROGRAMMABLE CARD
Modbus add Prg C. :17
DATE/TIME SETTINGS
<< >> Quick
RD Y Te rm +0 .00 Hz 0A
1.3 SETTINGS
Ramp increment: 01
Acceleration 9.51 s
Deceleration: 9.67 s
Acceleration 2: 12.58 s
Deceleration 2: 13.45 s
Code << >> Quick
Menu selected in
[Power up menu]
page 278
ENT
or, if the Controller Inside card is present
01/2010 Graphic display terminal
Subsequent power ups
© 2010 Schneider Electric All Rights Reserved
25
Altivar® 71 Programming Guide 30072-452-92
r
Graphic display terminal 01/2010
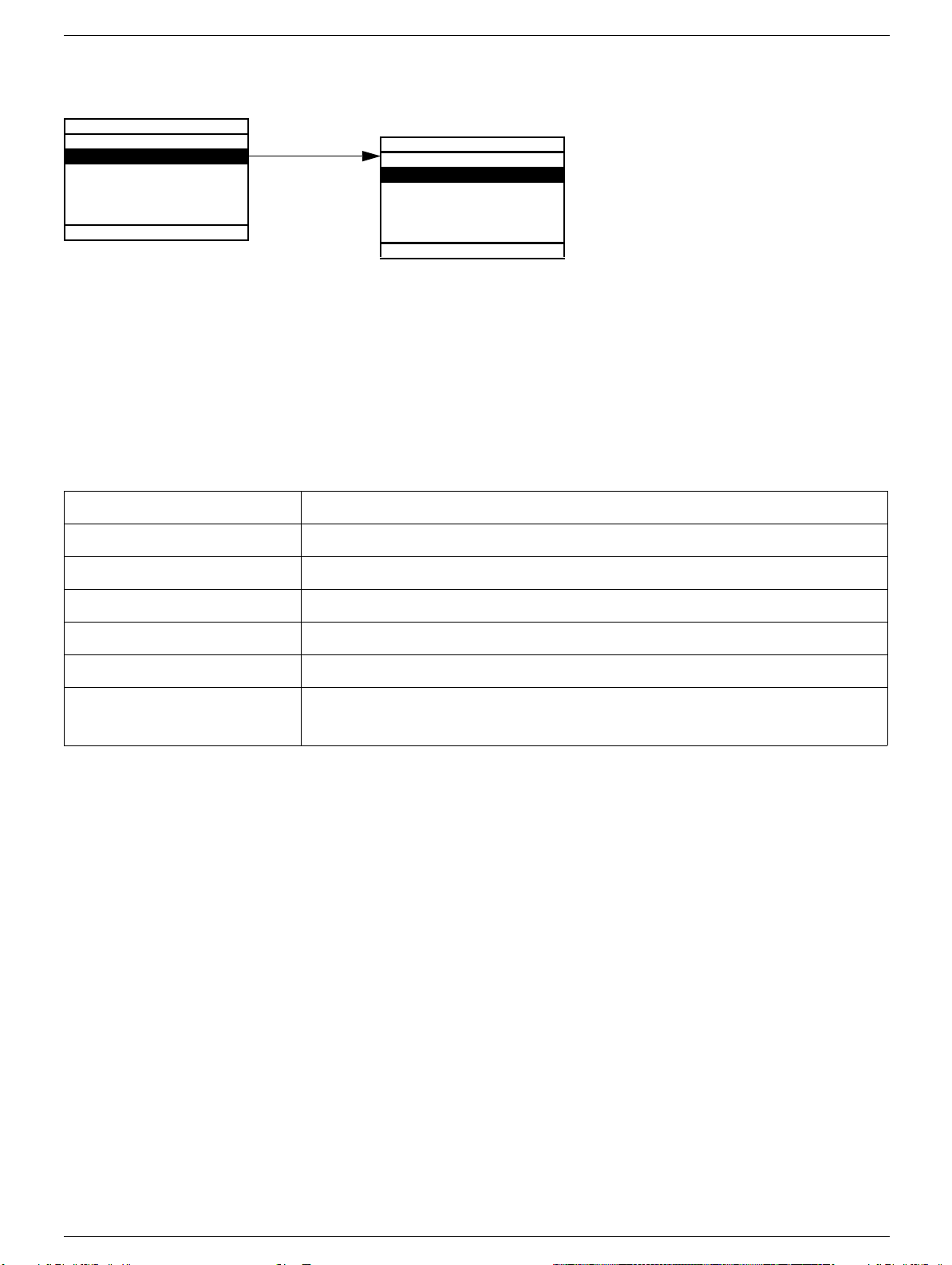
Programming: Example of accessing a parameter
Accessing the acceleration ramp
RDY Term +0.00Hz 0A
1 DRIVE MENU
1.1 SIMPLY START
1.2 MONITORING
1.3 SETTINGS
1.4 MOTOR CONTROL
1.5 INPUTS / OUTPUTS CFG
Code << >> Quick
RDY Term +0.00Hz 0A
Ramp increment: 01
ENT
Acceleration 9.51 s
Deceleration: 9.67 s
ESC
Acceleration 2: 12.58 s
Deceleration 2: 13.45 s
1.3 SETTINGS
Code << >> Quick
ENT
ENT or
ESC
RDY Term +0.00Hz 0A
Acceleration
9.51 s
Min = 0.01 Max = 99.99
<< >> Quick
NOTES:
• To select a parameter:
- Turn the navigation button to scroll vertically.
• To modify a parameter:
- Use the << and >> keys (F2 and F3) to scroll horizontally and select the digit to be modified (the selected digit changes to white on a
black background).
- Turn the navigation button to modify the digit.
• To cancel the modification:
- Press ESC.
• To save the modification:
- Press the navigation button (ENT).
© 2010 Schneide
Electric All Rights Reserved26
30072-452-92 Altivar® 71 Programming Guide
RD Y T er m +0 .00 Hz 0 A
1.4 MOTOR CONTROL
Standard mot. freq: 5 0Hz IEC
Rated motor power: 0.37 kW (0.5 HP)
Rated motor volt.: 206 V
Rated mot. current: 1.0 A
Rated motor freq.: 50.0 Hz
Code << >> Quick
ENT
RDY Term +0.00Hz 0A
QUICK NAVIGATION
RETURN TO MAIN MENU
DIRECT ACCESS TO...
10 LAST MODIFICATIONS
GOTO MULTIPOINT SCREEN
Code
See page 279
RD Y Te rm +0 .00 Hz 0A
MAIN MENU
1 DRIVE MENU
2 ACCESS LEVEL
3 OPEN / SAVE AS
4 PASSWORD
5 LANGUAGE
Code Quick
RD Y Te rm +0 .00 Hz 0A
DIRECT ACCESS TO...
1.3
SETTINGS
<< >>
ENT
RD Y Te rm +0 .00 Hz 0A
1.3 SETTINGS
Ramp increment: 01
Acceleration 9.51 s
Deceleration: 9.67 s
Acceleration 2: 12.58 s
Deceleration 2: 13.45 s
Code << >> Quick
RD Y Te rm +0 .00 Hz 0A
10 LAST MODIFICATIONS
Acceleration: 10 s
ENA prop.gain: 1.2
Rated mot. current: 15 A
Preset speed 4: 20 Hz
Preset speed 5: 30 Hz
Code
ESC
ENT
RD Y Te rm +0 .00 Hz 0A
Rated mot. current
15.0 A
<< >>
01/2010 Graphic display terminal
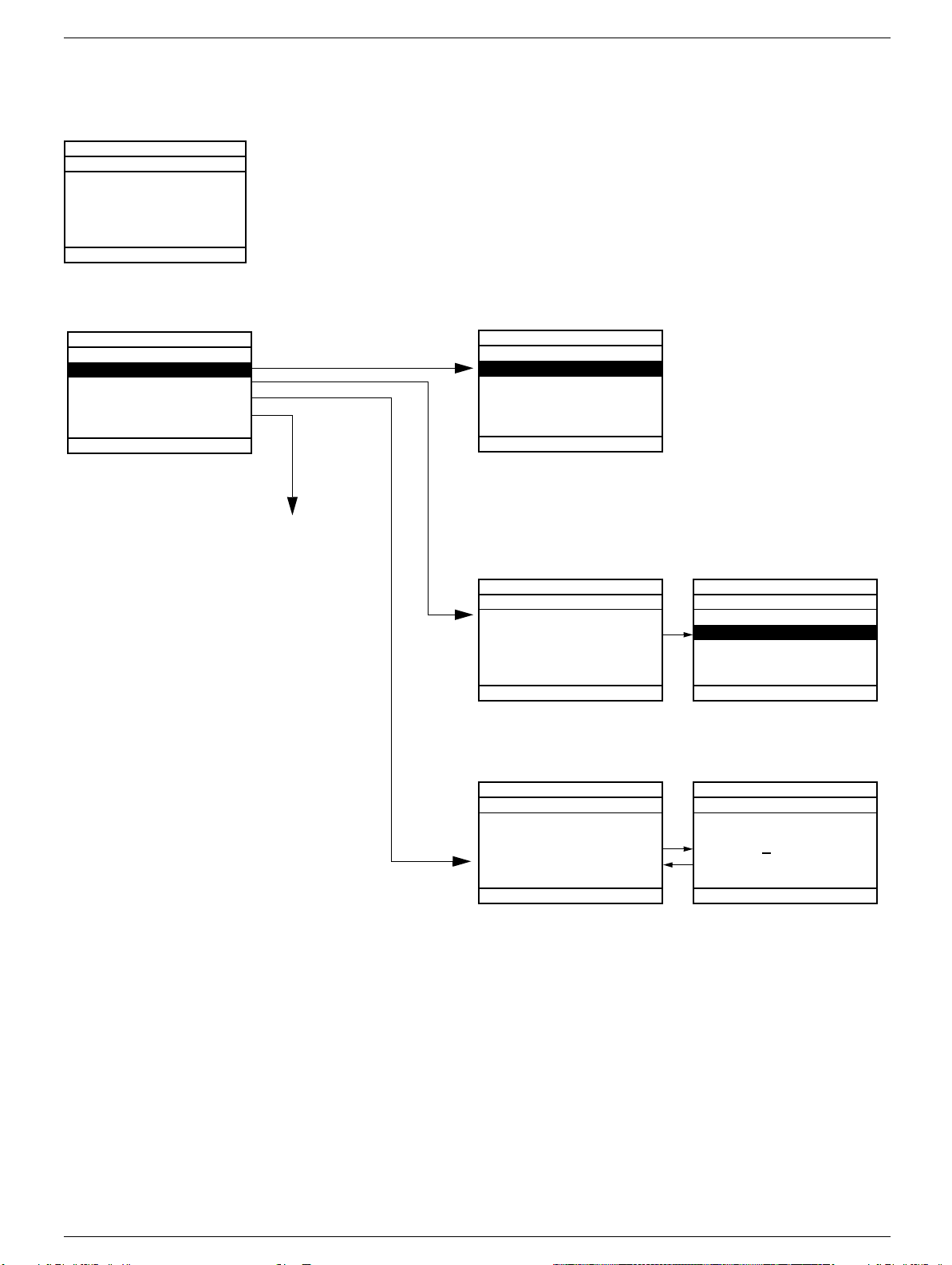
Quick navigation
If the "Quick" function is displayed above the F4 key, you can gain quick access to a parameter from any screen.
Example:
Press F4 to access the Quick screen, which contains
4 selection options.
• [HOME]: Return to [MAIN MENU].
• [DIRECT ACCESS TO...]: Opens the direct access window, which
will contain the text "1". The function keys << and >> (F2 and F3)
can be used to select each of the numbers and the navigation
button to increment or decrement the numbers: 1.3 in the example
below.
• [10 LAST MODIFICATIONS]: Opens a window in which the last 10
parameters modified can be accessed directly.
© 2010 Schneider Electric All Rights Reserved
27
Altivar® 71 Programming Guide 30072-452-92
r
RD Y Te rm +0 .00 Hz 0A
MAIN MENU
1 DRIVE MENU
2 ACCESS LEVEL
3 OPEN / SAVE AS
4 PASSWORD
5 LANGUAGE
Code Quick
6 MONITORING CONFIG.
7 DISPLAY CONFIG.
RD Y Te rm +0 .00 Hz 0A
1 DRIVE MENU
1.1 SIMPLY START
1.2 MONITORING
1.3 SETTINGS
1.4 MOTOR CONTROL
1.5 INPUTS / OUTPUTS CFG
Code << >> Quick
1.6 COMMAND
1.7 APPLICATION FUNCT.
1.8 FAULT MANAGEMENT
1.9 COMMUNICATION
1.10 DIAGNOSTICS
1.11 IDENTIFICATION
1.12 FACTORY SETTINGS
1.13 USER MENU
1.14 PROGRAMMABLE CARD
Graphic display terminal 01/2010
[MAIN MENU] - Menu mapping
Content of [MAIN MENU] menus
[1 DRIVE MENU]
[2 ACCESS LEVEL]
[3 OPEN / SAVE AS]
[4 PASSWORD]
[5 LANGUAGE]
[6 MONITORING CONFIG.]
See page 29
Defines which menus can be accessed (level of complexity)
Can be used to save and recover drive configuration files
Provides password protection for the configuration
Language selection
Customization of information displayed on the graphic display terminal during operation
[7 DISPLAY CONFIG.] • Customization of parameters
• Creation of a customized user menu
• Customization of the visibility and protection mechanisms for menus and parameters
© 2010 Schneide
Electric All Rights Reserved28
30072-452-92 Altivar® 71 Programming Guide
01/2010 Graphic display terminal
[1 DRIVE MENU]
RD Y Term +0.00Hz 0A
1.1 SIMPLY START
1.2 MONITORING
1.3 SETTINGS
1.4 MOTOR CONTROL
1.5 INPUTS / OUTPUTS CFG
1.6 COMMAND
1.7 APPLICATION FUNCT.
1.8 FAULT MANAGEMENT
1.9 COMMUNICATION
1.10 DIAGNOSTICS
1.11 IDENTIFICATION
1.12 FACTORY SETTINGS
1.13 USER MENU
1.14 PROGRAMMABLE CARD
1 DRIVE MENU
Code << >> Quick
Content of [1. DRIVE MENU] menus:
[1.1 SIMPLY START]:
[1.2 MONITORING]:
[1.3 SETTINGS]:
[1.4 MOTOR CONTROL]:
[1.5 INPUTS / OUTPUTS CFG]:
[1.6 COMMAND]:
[1.7 APPLICATION FUNCT.]:
[1.8 FAULT MANAGEMENT]:
[1.9 COMMUNICATION]:
[1.10 DIAGNOSTICS]:
[1.11 IDENTIFICATION]:
[1.12 FACTORY SETTINGS]:
[1.13 USER MENU]:
[1.14 PROGRAMMABLE CARD]:
Simplified menu for a quick start
Visualization of current, motor and input/output values
Accesses the adjustment parameters, which can be modified during operation
Motor parameters (motor nameplate, auto-tuning, switching frequency, control algorithms, and so forth)
I/O configuration (scaling, filtering, 2-wire control, 3-wire control, and so forth)
Configuration of command and reference channels (graphic display terminal, terminals, bus, and
so forth.)
Configuration of application functions (e.g., preset speeds, PID, brake logic control, and so forth)
Configuration of fault management
Communication parameters (fieldbus)
Motor/drive diagnostics
Identifies the drive and the internal options
Access to configuration files and return to factory settings
Specific menu set up by the user in the [7. DISPLAY CONFIG.] menu
Configuration of optional Controller Inside card
© 2010 Schneider Electric All Rights Reserved
29
Altivar® 71 Programming Guide 30072-452-92
r
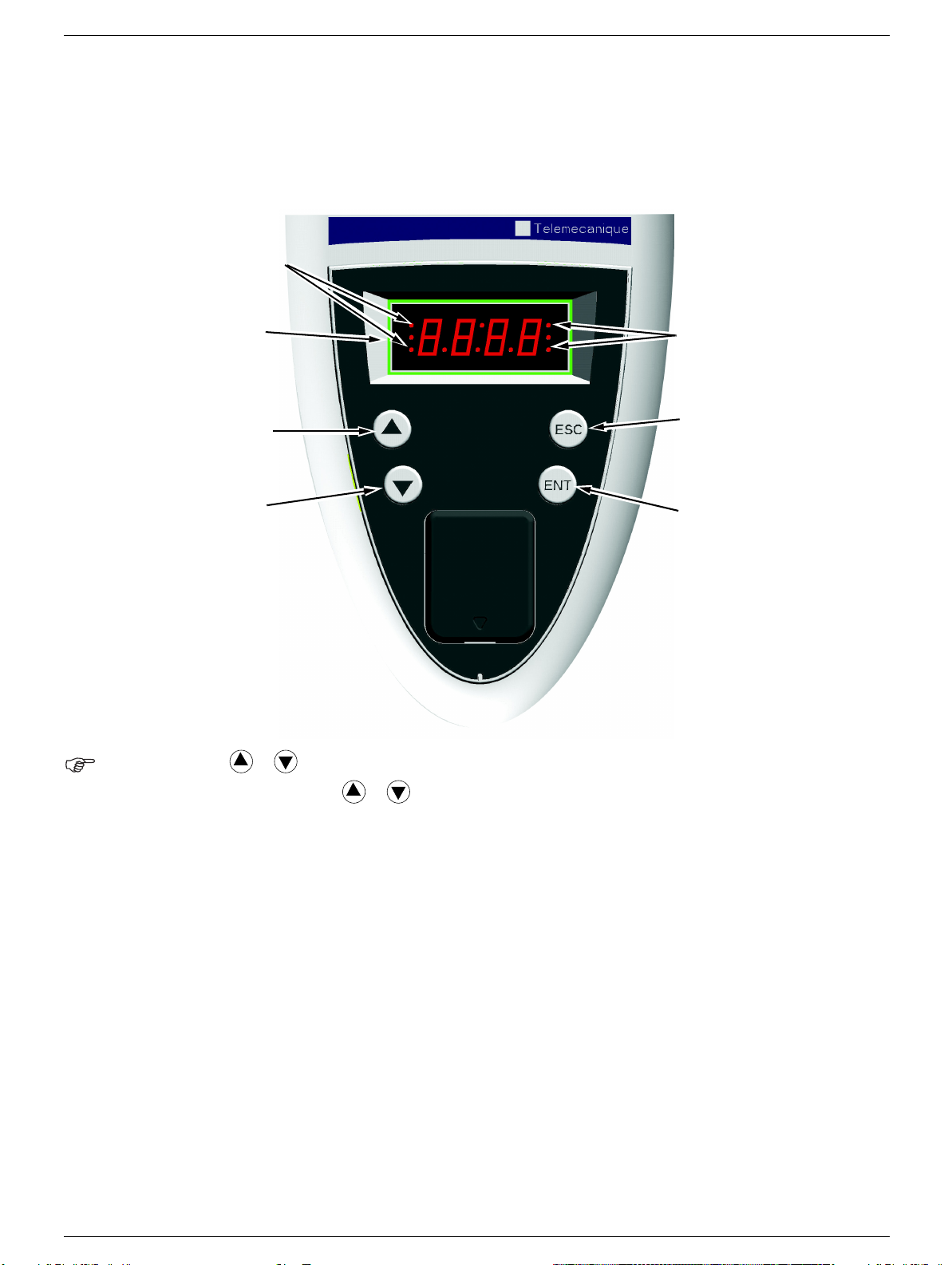
• Four 7-segment displays
• Enters a menu or parameter, or
saves the displayed parameter
or value
• Returns to the previous
menu or parameter, or
increases the displayed
value
• Exits a menu or parameter, or
aborts the displayed value to
return to the previous value in
the memory
• Goes to the next menu or
parameter, or decreases
the displayed value
• 2 CANopen status LEDs
• 2 Modbus status LEDs
NOTES
Integrated display terminal 01/2010
Integrated display terminal
®
Altivar
previous pages can also be connected to these drives.
Functions of the display and the keys
71 drives can feature an integrated display terminal with a 7-segment 4-digit display. The graphic display terminal described on the
• Pressing or does not store the selection.
Save and store the selection: ENT
The display flashes when a value is stored.
Normal display, with no detected fault present and no startup:
- 43.0: Display of the parameter selected in the SUP menu (default selection: motor frequency)
- CLI: Current limit
- CtL: Controlled stop on input phase loss
- dCb: DC injection braking in progress
- FLU: Motor fluxing in progress
- FSt: Fast stop.
- nLP: No line power (no line supply on L1, L2, L3)
- nSt: Freewheel stop
- Obr: Auto-adapted deceleration
- PrA: Power Removal function active (drive locked)
- rdY = Drive ready
- SOC: Controlled output cut in progress
- tUn: Auto-tuning in progress
- USA: Undervoltage alarm
- ASA: Measurement of the phase-shift angle in progress
The display flashes to indicate the presence of a detected fault.
• Press and hold down (>2 s) or to scroll through the data quickly.
© 2010 Schneide
Electric All Rights Reserved30
 Loading...
Loading...