


2354235 11/2008
Altivar 71
Frequenzumrichter für
Synchron- und Asynchronmotoren
Programmieranleitung
Software V3.3
12/2009
1755856
www.schneider-electric.com

Inhalt
Vor der Installation _____________________________________________ _______________________________________________ 4
Gliederung der Dokumentation_____________________________________________________________ ______________________ 5
Weiterentwicklungen der Software_____________________________________________ ___________________________________ 6
Vorgehensweise zur Inbetriebnahme______________________________________________________________________________ 8
Werkseitige Konfiguration____________________________________________________ ___________________________________ 9
Anwendungsspezifische Funktionen _____________________________________________________________________________ 10
Inbetriebnahme – Einleitende Empfehlungen_______________________________________________________________________ 14
Grafikterminal_______________________________________________________________________________________________ 17
Beschreibung des Terminals _____________________________________________________________________________ 17
Beschreibung des Grafikterminals _________________________________________________________________________ 18
Erstes Einschalten - Menü [5 SPRACHE] ___________________________________________________________________ 21
Alle weiteren Einschaltvorgänge___________________________________________________________________________ 22
Programmierung: Beispiel für den Zugriff auf einen Parameter___________________________________________________ 23
Schnellzugang ________________________________________________________________________________________ 24
Integriertes Terminal__________________________________________________________________________________________ 27
Funktionen der Anzeige und der Tasten___________________________________________________________________________ 27
Zugriff auf die Menüs ___________________________________________________________________________________ 28
Zugriff auf die Menüparameter____________________________________________________________________________ 29
[2 ZUGRIFFSEBENE] (LAC-)___________________________________________________________________________________ 30
Struktur der Parametertabellen__________________________________________________________________________________ 33
Wechselbeziehung der Parameterwerte___________________________________________________________________________ 34
Suche nach einem Parameter in diesem Dokument _________________________________________________________________ 35
[1.1 SCHNELLSTART] (SIM-) __________________________________________________________________________________ 36
[1.2 ÜBERWACHUNG] (SUP-)__________________________________________________________________________________ 44
[1.3 EINSTELLUNGEN] (SEt-)__________________________________________________________________________________ 53
[1.4 ANTRIEBSDATEN] (drC-)__________________________________________________________________________________ 67
[1.5 EIN/ AUSGÄNGE] (I-O-) ___________________________________________________________________________________ 87
[1.6 STEUERUNG] (CtL-)_____________________________________________________________________________________ 115
[1.7 APPLIKATIONS-FKT.] (FUn-)______________________________________________________________________________ 128
[1.8 FEHLERMANAGEMENT] (FLt-) ____________________________________________________________________________ 214
[1.9 KOMMUNIKATION] (COM-) _______________________________________________________________________________ 239
[1.10 DIAGNOSE]___________________________________________________________________________________________ 243
[1.11 IDENTIFIKATION]______________________________________________________________________________________ 245
[1.12 WERKSEINSTELLUNG] (FCS-) ___________________________________________________________________________ 246
[1.13 BENUTZERMENÜ] (USr-)________________________________________________________________________________ 249
[1.14 MENÜ PROG. KARTE] (PLC-) ____________________________________________________________________________ 250
[3 LADEN / SPEICHERN ALS]_________________________________________________________________________________ 251
[4 ZUGRIFFSCODE] (COd-) __________________________________________________________________________________ 253
[6 AUSWAHL ANZEIGETYP]__________________________________________________________________________________ 255
[7 ANZEIGE KONFIG.]_______________________________________________________________________________________ 259
[ANSCHLUSS MULTIPUNKT] _________________________________________________________________________________ 264
Wartung __________________________________________________________________________________________________ 265
Fehler - Ursachen - Fehlerbeseitigung___________________________________________________________________________ 266
Tabelle der Benutzereinstellungen______________________________________________________________________________ 272
Verzeichnis der Funktionen ___________________________________________________________________________________ 274
Verzeichnis der Parametercodes _______________________________________________________________________________ 275
1755856 12/2009 3
Vor der Installation
Lesen Sie sich diese Anweisungen sorgfältig durch, bevor Sie den Frequenzumrichter einsetzen.
ACHTUNG
BERÜHRUNGSSPANNUNGEN
• Lesen Sie sich die Installationsanleitung vollständig und sorgfältig durch, bevor Sie den Frequenzumrichter
ATV71 installieren und in Betrieb setzen. Installation, Einstellung und Reparaturen müssen durch qualifiziertes
Personal erfolgen.
• Es unterliegt der Verantwortung des Betrei bers, dass die Sc hutzerdun g aller Gerät e den g eltenden i nternati onalen
und nationalen Normen bezüglich elektrischer Geräte entspricht.
• Zahlreiche Komponenten des Frequenzumrichters, einschließlich der gedruckten Schaltungen, werden über die
Netzspannung versorgt. BERÜHREN SIE DIESE KOMPONENTEN NICHT!
Verwenden Sie nur elektrisch isolierte Werkzeuge.
• Berühren Sie keine ungeschirmten Komponenten od er Klemmenschrauben, wenn das Gerät unter Spannung steht.
• Schließen Sie die Klemmen PA/+ und PC/- oder die Kondensatoren des DC-Busses nicht kurz.
• Montieren Sie alle Abdeckungen und schließen Sie diese, bevor Sie den Umrichter unter Spannung setzen.
• Führen Sie vor jeglicher Wartung oder Reparatur am Frequenzumrichter folgende Arbeiten aus:
- Unterbrechen Sie die Spannungsversorgung.
- Bringen Sie am Leistungs- oder Trennschalter des Frequenzumrichters ein Schild mit dem Vermerk „NICHT
EINSCHALTEN“ an.
- Verriegeln Sie den Leistungs- oder Trennschalter in der geöffneten Stellung.
• Trennen Sie den Frequenzumrichter vor jeglichen Arbeiten vom Netz und gegebenenfalls auch die externe Versorgung
des Steuerteils. WARTEN SIE 15 MINUTEN, damit sich die Kondensatoren des DC-Busses entladen können.
Befolgen Sie dann das in der Installationsanleitung angegebene Verfahren zur Messung der Spannung des
DC-Busses, um zu überprüfen, ob die Gleichspannung unte r 42 V liegt. Die LED des Freque nzumrichters ist für die
Anzeige vorhandener Spannung am DC-Bus nicht präzise genug.
Ein elektrischer Schlag kann zu Tod oder schwerwiegenden Verletzungen führen.
VORSICHT
BESCHÄDIGTES GERÄT
Installieren Sie den Umrichter nicht und nehmen Sie ihn nicht in Betrieb, wenn er beschädigt ist.
Bei Nichtbeachtung dieser Vorkehrung können Materialschäden auftreten.
4 1755856 12/2009

Gliederung der Dokumentation
Die folgenden technischen Handbücher zum Alti var 71 sind auf der Internetseite www.tele mecanique.com und auf der mit jedem Umri chter
gelieferten CD-ROM verfügbar.
Installationsanleitung
Diese Anleitung beschreibt die Montage und Verdrahtung des Umrichters.
Programmieranleitung
Diese Anleitung beschreibt die Funktionen, die Parameter und die Verwendung des Terminals des Umrichters (integriertes Terminal und
Grafikterminal).
Die Kommunikationsfunktionen werden in dieser Anleitung nicht erläutert, sondern in der Anleitung des verwendeten Busses oder
Netzwerks.
Anleitung für Kommunikationsparameter
Diese Anleitung beschreibt Folgendes:
• Parameter des Umrichters mit spezifischen Elementen für die Verwendung eines Kommunikationsbusses oder -netzwerks
• Die kommunikationsspezifischen Betriebsarten (Zustandsgraph)
• Interaktion zwischen der Kommunikation und der lokalen Steuerung
Anleitungen für Modbus, CANopen, Ethernet, Profibus, INTERBUS, Uni-Telway,
FIPIO, Modbus Plus...
Diese Anleitungen beschreiben die Montage, den Bus- oder Netzwerkanschluss, die Anzeigen, die Diagnose und die Konfiguration der
spezifischen Kommunikationsparameter mittels des eingebauten Terminals oder des Grafikterminals.
Sie erläutern gleichfalls die Kommunikationsdi enste der Protokolle.
Umstellhilfe ATV 58-58F / ATV 71
Diese Anleitung beschreibt im Einzelnen die Untersch iede z wische n Al tivar 7 1 u nd Al tivar 58 / 58F u nd erklä rt die Vorkehrun gen, d ie beim
Auswechseln eines Altivar 58 oder 58F zu treffen sind, u. a. auch für Umrichter, die über einen Bus oder ein Netzwerk kommunizieren.
Umstellhilfe ATV 78 / ATV 61/71
Diese Anleitung beschreibt im Einzelnen die Unterschiede zwischen Altivar 61/71 und Altivar 78 und erklärt die Vorkehrungen, die beim
Auswechseln eines Altivar 78 zu treffen sind.
1755856 12/2009 5
Weiterentwicklungen der Software
Der Altivar ATV 71 wurde seit seiner Vermarktung kontinuierlich durch Zusatzfunktionen erweitert. Die Softwareversion wird zur Version
V3.3. Die alten Versionen können ohne weitere Änderungen durch die neue Version ersetzt werden.
Diese Dokumentation bezieht sich auf die Version V3.3, sie lässt sich jedoch auch auf die früheren Versionen anwenden, da in der
aktualisierten Version nur Werte und Parameter hinzugefügt wurden, die Parameter der alten Versionen jedoch weder verändert noch
gelöscht wurden.
Die Angaben zur Softwareversion befinden sich auf dem Typenschild, das auf der Umrichterseitenwand aufgeklebt ist.
Neuheiten der Version V1.2 im Vergleich zu V1.1
Werkseinstellung
Hinweis 1: In der Version V1.1 entsprach der Analogeingang 0 ±10 V. In der neuen Version wurde dieser Eingang aus
Sicherheitsgründen mit 0 +10 V konfiguriert.
Hinweis 2: In der Version V1.1 wurde der Analogausgang AO1 der Motorfrequenz zugeordnet. In der neuen Version ist dieser
Ausgang nicht belegt.
Mit Ausnahme dieser beiden Parameter blieb die Werkseins tellung de r Version V1. 1 in der neue n Version erha lten. Di e neuen Fu nktionen
sind in der Werkseinstellung nicht aktiviert.
Bereich der Motorfrequenz
Der maximale Ausgangsfrequenzbereich wurde von 1000 auf 1600 Hz erweitert (Möglichkeiten je nach Baugröße und gewählter Kenn linie).
Neue Parameter und neue Funktionen
Menü [1.2 ÜBERWACHUNG] (SUP-)
Hinzufügung der Zustände und internen Werte bezüglich der neuen Funktionen, wie weiter unten beschrieben.
Menü [1.3 EINSTELLUNGEN] (SEt-)
• [Schw. Drehm. hoch] (ttH), Seite 66.
• [Schw. Drehm. Low] (ttL), Seite 66.
• [Schw. Alarm Puls] (FqL), Seite 67.
• [Schw freier Auslauf] (FFt), Seite 67.
Menü [1.4 ANTRIEBSDATEN] (drC-)
• [Inkremente Upm] (InSP), Seite 69.
• Erweiterung auf alle Umrichtertypen der folgenden Konfigurationen, die bis jetzt auf 45 kW bei ATV71pppM3X und auf 75 kW
bei
ATV71pppN4 begrenzt waren: Synchronmotor [Sync. Motor] (SYn), Seite 71, Sinusfilter [Sinus Filter] (OFI), Seite 82,
Geräuschreduzierung [Geräuscharm] (nrd), Seite 83, Bremsmodulausgleich [Regel. Bremsleist.] (bbA), Seite 85.
Menü [1.5 EIN/ AUSGÄNGE] (I-O-)
• Der Eingang AI1 kann über [Typ AI1] (AI1t), Seite 94, mit 0 +10 V oder 0 ±10 V konfiguriert werden.
• [AI1 Kommunikation] (AIC1), Seite 98.
• Neue Zuordnungsmöglichkeiten bei den Relais- und Logikau sgängen, Seite 103: Schlaffseil, Drehmoment über ob erem Schwellwert,
Drehmoment unter unterem Schwellwert, Rechtslauf des Moto rs, Linkslauf des Motors, Schwellwert Istf requenz erreicht, Erkennung
von Lastschwankungen.
• Der Analogausgang AO1 kann als Logikausgang verwendet u nd den Funktionen der Relais- und Logikausgänge zugeordnet werden,
Seite
108.
• Neue Änderungsfunktion der Analogausgangsskalen, Seite 110, über die Parameter [Skal. min AO1] (ASLx) und
[Skal. max AO2] (ASHx).
• Neue Zuordnungsfunktionen für die Relais- und Logikausgänge, Seite 111: Motormoment mit Vorzeichen und Istwert der
Motorfrequenz.
• Neue Zuordnungsfunktionen für die Alarmgruppen, Seite 115: Schlaffseil, Drehmoment über oberem Schwellwert, Dre hmoment unter
unterem Schwellwert, Schwellwert gemessene Drehzahl erreicht, Erkennung von Lastschwankungen.
6 1755856 12/2009
Weiterentwicklungen der Software
Menü [1.7 APPLIKATIONS-FKT.] (Fun-)
• Die Funktionen Summensollwert, Subtrahierer, Multiplikator können dem virtuellen Eingang [AI virt Kom] (AIU1), Seite 136,
zugeordnet werden.
• Neuer Parameter [Schw freier Auslauf] (FFt), Seite 141, über den ein Schwellwert für den Übergang zum freien Auslauf am Ende der
Rampe oder beim Schnellhalt eingestellt werden kann.
• Bremsanzug auf Drehzahl Null geregelt [Schl. Bremse bei 0] (bECd), Seite 162.
• Die Lastmessung [Zuord. Lastmessung] (PES), Seite 167, kann jetzt dem virt uellen Eingang [AI virt Kom] (AIU1) zugeordnet werden.
• Neue Funktion „Schlaffseil“, Seite 171, mit den Parametern [Konfig. Schlaffseil] (rSd) und [Schw. Schlaffs. Erk] (rStL).
• Verwendung der Rampenfunktion [Hochlaufzeit 2] (AC2), Seite 179, während der Anläufe und der Wakeups der PID-Funkti on.
• Die Momentenbegrenzung [BEGR. DREHMOMENT] (tOL-), Seite 186, kann über [Inkrement Drehm.] (IntP) in % oder mit 0,1 %
konfiguriert und dem virtuellen Eingang [AI virt Kom] (AIU1) zugeordnet werden.
• Neue Funktion „Berechneter Anhalteweg (Fernstopp) nach Abbremsungs-Endschalter“, Seite 195, mit den Parametern [Anhalteweg]
(Std), [Nenn-Geschw.] (nLS) und [Korrektur Stop] (SFd).
• Die Positionierung über Geber oder Endschalter [POSITION ÜBER ENDSCH] (LPO-), Seite 196, kann mit [Konfig. Pos Stop] (SAL)
und [Konf. EM Brems.] (dA L) in positiver oder negativer Logik konfiguriert werden.
• Die Umschaltung der Parameter [PARAMETERUMSCHALT.] (MLP-), Seite 199, kann den erreichten Frequenzschwe llwerten [Freq.
err.] (FtA) und [Freq 2 err.] (F2A) zugeordnet werden.
• Neue Funktion „Zwischenetage“: Menü [ZWISCHENETAGE] (HFF-), Seite 213.
Menü [1.8 FEHLERMANAGEMENT] (FLt-)
• Möglichkeit zur Neuinitialisierung des Umrichters über [Reset Umrichter] (rP), Seite 220, ohne ihn auszuschalten.
• Möglichkeit zur Neuinitialisierung des Umrichters durch [Zuord. Reset Prod.] (rPA), Seite 220, über den Logikeingang, ohne den
Umrichter auszuschalten.
• Die Möglichkeit zur Konfiguration des Fehlers „Verlust der Motorphase“ [Verlust Motorphase] (OPL), Seite 225, bei [Ausg schalt]
(OAC) wurde auf alle Umrichtertypen erweitert (bisher begrenzt auf 45 kW bei ATV71pppM3X und auf 75 kW bei ATV71pppN4).
• Der externe Fehler [EXTERNER FEHLER] (EtF-), Seite 228, ist jetzt high oder low aktiv konfigurierbar über [Konfig. externer Fehler]
(LEt).
• Neue Überwachungsfunktion für die Drehzahlmessung über den Eingang „Pulse Input“ , Seite 235, im Menü
[FREQUENZMESSER] (FqF-).
• Neue Funktion zur Erkennung von Lastschwankungen, Seite 237, über das Menü [ERK. DELTA LAST] (dLd-).
• Der Kurzschlussfehler des Bremsmoduls kann über [FehlerMgt. Bremsmodul] (Fehlerverw. Bremsmodul) (bUb), Seite 239,
konfiguriert werden.
Menü [7 ANZEIGE KONFIG.]
• Hinzufügung der Parameter [KONTRAST] und [STANDBY] im Menü [7.4 PARAMETER TERMINAL], Seite 266, zur Einstellung des
Kontrasts und des Standby-Modus des graphischen Terminal.
Neuheiten der Version V1.6 im Vergleich zu V1.2
Erweiterung der Baureihe durch Hinzufügung der Umrichter ATV71ppppY für Netze von 500 bis 690 V.
Es sind keine neuen Parameter hinzugekommen, jedoch wurden die Einstellbereiche und die Werkseinstellungen bestimmter Parameter
den neuen Spannungswerten angepasst.
Menü [1.5 EIN/ AUSGÄNGE] (I-O-)
Erhöhung des Einstellbereichs der Parameter für Relaisverzögerung und logische Ausgänge: 0 bis 60000 ms anstelle von 0 bis 9999 ms.
Neuheiten der Version V2.5 im Vergleich zu V1.6
Menü [1.3 EINSTELLUNGEN] (SEt-)
• Neue Parameter [Ausblendfrequenz] (JPF), [Ausblendfrequenz 2] (JF2) und [3rd Ausblendfrequenz] (JF3) Seite 67 ermöglichen das
Ausblenden kritischer Frequenzbereiche zum Vermeiden von Resonanzen.
• Mit dem neuen Parameter [Ausblendfreq.Hysterese] (JFH) Seite 67 wird der Bereich der Ausblendfrequenzen eingestellt.
• Möglichkeit zur Einstellung des Parameter [Verh. Drehmoment] (trt) Seite 67 (sichbar im Menü [DREHMOM: STEUERUNG] (tOr-)
Seite 183).
Wichtigt :
In der Version V2.5, werden folgende Funktionen bei Verwendung des freien Auslauf anders behandelt:
• [ENDSCHALTER MANAGEMENT] (LSt-) Funktion,
• [POSITION ÜBER ENDSCH] (LPO-) Funktion,
• "Auschaltbefehl" über die Kommunikation (siehe CiA402 Zustandsma schine im Kommunikationshandbuch).
Fehlerbeseitigung im Verhältnis zu älteren Versionen beim Anhalten im freien Auslauf.
1755856 12/2009 7

Weiterentwicklungen der Software
Neuheiten der Version V2.7 im Vergleich zu V2.5
Menü [7 ANZEIGE KONFIG.]
• Hinzufügung von [Startmenü] in [7.4 PARAMETER TERMI NAL ] , Seite 262. Mit diesem Parameter kann das Menü gewählt werde n,
welches auf dem Umrichter beim Starten angezeigt wird.
Menü [1.3 EINSTELLUNGEN] (SEt-)
Der Einstellbereich von [Zeit Wiederanl auf] (ttr), Seite 163, kann jetzt von 0.00 bis 15.00 Sekunden konfiguriert werden.
Neuheiten der Version V3.3 im Vergleich zu V2.7
Menü [1.7 APPLIKATIONS-FKT.] (Fun-)
Neuer Parameter [ANSCHL. AFE EINHEIT] (AFE), Die direkte Spannungsversorgung über das Active Front End (AFE, aktive Netzeinheit)
verringert die Harmonischen des Netzstroms um 4% ermöglicht eine Netzrückspeisung der generatorischen Energie.
8 1755856 12/2009
Vorgehensweise zur Inbetriebnahme
INSTALLATION
v 1 Ausführliche Informationen finden
Sie in der Installationsanleitung.
PROGRAMMIERUNG
Anwendbares Verfahren, falls die Werkseinstellung, Seite 10, und die
Verwendung des einzigen Menüs [SCHNELLSTART MENÜ] (SIM-) für die
Applikation ausreichen.
b 2 Gerät ohne Fahrbefehl einschalten
v Im Falle einer separaten Versorgung
des Steuerteils ist das auf Seite 15
beschriebene Verfahren einzuhalten.
b 3 Sprache wählen (wenn der
Umrichter ein Grafikterminal
enthält)
b 4 Menü konfigurieren
[SCHNELLSTART MENÜ]
(SIM-)
v 2- oder 3-Draht-Steuerung
v Makrokonfiguration
v Motorparameter
) Motormessung ausführen
v Thermischer Motorstrom
v Hochlauf- und Auslauframpen
v Drehzahlbereich
Empfehlungen:
• Bereiten Sie die Programmierung
durch Ausfüllen der Tabellen für die
Benutzereinstellungen vor: Seite 275
.
• Führen Sie zur Optimierung der Leistungen
eine Motormessung durch: Seite 43
.
• Kehren Sie zu den Werkseinstellung en
zurück, falls Sie nicht weiter wissen:
Seite 251
.
Hinweis: Stellen Sie sicher, dass die
Verdrahtung des Umrichters mit
der Konfiguration kompatibel ist.
b 5 Starten
1755856 12/2009 9

Werkseitige Konfiguration
Voreinstellung des Umrichters
Der Altivar 71 ist werkseitig für die gängigsten Anwendungen voreingestellt:
• Makrokonfiguration: Start/Stopp
• Motorfrequenz: 50 Hz
• Anwendungen mit konstantem Drehmoment, asynchronem Motor und vektorieller Regelung ohne Rückführung
• Modus: Normales Anhalten über Auslauframpe
• Anhaltemodus bei Störung: Freier Auslauf
• Lineare Rampen, Hochlaufzeit, Auslaufzeit: 3 Sekunden
• Kleine Frequenz: 0 Hz
• Große Frequenz: 50 Hz
• Thermischer Motorstrom = Nennstrom des Umrichters
• Bremsstrom bei DC-Aufschaltung im Stillstand = 0,7 x Nennstrom des Umrichters während 0,5 Sekunden
• Kein automatischer Wiederanlauf nach einer Störung
• Taktfrequenz 2,5 kHz oder 4 kHz, je nach Umrichtertyp
• Logikeingänge:
- LI1: Rechtslauf, LI2: Linkslauf (zwei Fahrtrichtungen), 2-Draht-Steuerung bei Übergang
- LI3, LI4, LI5, LI6: Inaktiv (nicht zugeordnet)
• Analogeingänge:
- AI1: Drehzahlsollwert 0 +10 V
- AI2: 0 - 20 mA inaktiv (nicht belegt)
• Relais R1: Bei einer Störung (oder Umrichter ohne Spannung) fällt der Kontakt ab.
• Relais R2: Inaktiv (nicht belegt)
• Analogausgang AO1: 0 - 20 mA inaktiv (nicht belegt)
Wenn die oben genannten Werte mit Ihrer Anwendung vereinbar sind, kann der Umrichter ohne Änderung der Einstellungen eingesetzt werden.
Voreinstellung der Optionskarten
Die Ein-/Ausgänge der Optionskarten werden bei der Werkseinstellung nicht zugeordnet.
10 1755856 12/2009
Anwendungsspezifische Funktionen
Die Tabellen auf den folgenden Seiten zeigen als Auswahlhilfe die Funktionszuordnungen für die gängigsten Anwendungen an.
Die in diesen Tabellen aufgeführten Anwendungen beziehen sich insbesondere auf die folgenden Maschinen:
• Hubwerke: Kräne, Laufkräne, Portalkräne (senkrechtes Heben, horizontales Verfahren, Drehen), Hebe- und Senkstationen
• Aufzüge: Lastenaufzüge bis 1,2 m / s
• Fördertechnik: Paletten, Fördereinrichtungen, Drehtische
• Verpackung: Kartonverpackungsmaschinen, Etikettiermaschinen
• Textil: Webstühle, Kratzmaschinen, Waschmaschinen, Spinnmaschinen, Spinn- und Zwirn-Schlichtmaschinen
• Holzbearbeitung: Drehmaschinen, Sägen, spanabhebende Formgebung
• Maschinen mit hohem Trägheitsmoment: Zent rifugen, Mischmasch inen, Auswuchtungs maschinen (Pumpenschwe ngel, Pressen)
• Prozessverarbeitung
Die erwähnten Zuordnungen sind weder obligatorisch noch vollständig, da jede Maschine spezifische Eigenschaften aufweist.
Einige Funktionen sind speziell auf eine bestimmte Anwendung abgestimmt. In diesem Fall wird auf den entsprechenden Seiten
im Programmierteil in Form eines Kartenreiters am Rand auf die Anwendung hingewiesen.
Funktionen der Motorsteuerung
Anwendungen
Funktion Seite
U/f-Kennlinie
Vektorielle Regelung ohne Rückführung
Vektorielle Regelung mit Rückführung
Vektorielle Regelung, 2 Inkremente
Synchronmotor im offenen Regelkreis
Motorfrequenz bis 1600 Hz
Begrenzung von Motorüberspannungen
Verbindung auf dem DC-Bus (siehe Bedienungsanleitung)
Motormagnetisierung über Logikeingang
Taktfrequenz bis 16 kHz
Motormessung
71
71
71
71
71
69
83
-
154
82
70
Hubwerke
Aufzüge
Fördertechnik
Verpackung
Textil
Holzbearbeitung
Maschinen mit hohem
Trägheitsmoment
b b b
b b b b b b b b
b b b b b b b b
b b
b
b b
b b
b b
b b b
b b b
b b b b b b b b
Prozessverarbeitung
1755856 12/2009 11

Anwendungsspezifische Funktionen
Funktionen für Drehzahlsollwerte
Funktion Seite
Anwendungen
Bipolarer Differentialsollwert 91
Entlinearisierung des Sollwerts (Lupeneffekt) 93
Frequenzsteuereingang 125
Umschalten der Sollwerte
Sollwertsummierung 134
Subtraktion der Sollwerte 134
Multiplikation der Sollwerte 134
S-förmige Rampen 137
Schrittbetrieb (JOG) 145
Vorwahlfrequenzen 146
+/-Drehzahl über Taster mit einfacher Betätigung
(1
Stufe)
+/-Drehzahl über Taster mit zweifacher Betätigung
(2
Stufen)
+/-Drehzahl um den Sollwert 151
Sollwertspeicherung 153
126 - 135
149
149
Hubwerke
Aufzüge
Fördertechnik
Verpackung
Textil
Holzbearbeitung
b b b
b b
b b
b
b
b
b
b b b
b b b
b b b b b
b
b b
Maschinen mit hohem
Trägheitsmoment
Prozessverarbeitung
b
b
12 1755856 12/2009
Anwendungsspezifische Funktionen
Spezielle Anwendungsfunktionen
Funktion Seite
Anwendungen
Schnellhalt 141
Verwaltung der Endschalter 155
Bremssteuerung 157
Lastmessung 166
Heben mit hoher Drehzahl 168
Schlaffseil 171
PID-Regler 173
Drehmomentensteuerung 182
Drehmomentbegrenzung Motor / Generator 185
Lastverteilung 85
Steuerung Netzschütz 189
Steuerung nachgeschaltetes Motorschütz 191
Positionierung durch Endschalter oder Geber 193
Berechneter Anhalteweg (Fernstopp) nach Abbremsungs-
Endschalter
ENA-System (mechanisch mit Unwucht) 80
Parameterumschaltung 198
Umschalten der Motoren oder Konfigurationen 201
Traverse Control 205
Konfiguration des Anhaltemodus 141
Notversorgung 212
Zwischenetage 213
195
Hubwerke
Aufzüge
Fördertechnik
Verpackung
Textil
Holzbearbeitung
Maschinen mit hohem
Trägheitsmoment
b b
b b b
b b b
b b
b
b
b b b
b b b b
b b
b b b
b
b b
b b
b
b b b b b b b b
b b b
b
b b b b
b
b
Prozessverarbeitung
b
1755856 12/2009 13
Anwendungsspezifische Funktionen
Sicherheitsfunktionen / Fehlerbehandlung
Funktion Seite
Anwendungen
Power Removal (Sicherheitsfunktion,
siehe
Bedienungsanleitung)
Stopp bei thermischem Alarm 227
Alarmverwaltung 115
Fehlermanagement 218 - 241
IGBT-Test 230
Einfangen im Lauf 222
Thermischer Schutz der Bremswiderstände 239
Motorschutz durch PTC-Fühler 218
Verwaltung von Unterspannungen 229
Verlust 4-20 mA 231
Unkontrollierte Unterbrechung nach dem Umrichter
(Motorphasenausfall)
Automatischer Wiederanlauf 221
Messung der Motordrehzahl über den Eingang
„Pulse input“
Erkennung einer Lastvariation 237
-
225
235
Hubwerke
Aufzüge
Fördertechnik
Verpackung
Textil
Holzbearbeitung
Maschinen mit hohem
Trägheitsmoment
b b b b b b b b
b
b b b b b b b b
b b b b b b b b
b b b b b b b b
b b b
b b b b
b b b b b b b b
b b b
b b b b b b
b
b
b b b
b
Prozessverarbeitung
14 1755856 12/2009
Inbetriebnahme – Einleitende Empfehlungen
ACHTUNG
UNERWARTETER BETRIEB DES GERÄTS
• Bevor Sie den Altivar 71 einschalten und konfigurieren, stellen Sie sicher, dass der Eingang PWR (POWER
REMOVAL) deaktiviert ist (Zustand 0), um einen unvorhergesehenen Neustart zu vermeiden.
• Stellen Sie vor dem Einschalten oder beim Verlassen des Konfi gurationsme nüs siche r, dass di e den Fahrbef ehlen
zugeordneten Eingänge deaktiviert sind (Zustand 0), da diese das sofort ige Anlaufen d es Motors bewirken können.
Eine Nichtbeachtung dieser Vorkehrungen kann zum Tod oder schwerwiegenden Verletzungen führen.
VORSICHT
NETZSPANNUNG NICHT KOMPATIBEL
Bevor Sie den Umrichter einschalten und konfigurieren, stellen Sie sicher, dass die Netzspannung mit der Versorgungsspannung
des Umrichters kompatibel ist. Bei nicht kompatibler Netzspannung kann der Umrichter beschädigt werden.
Bei Nichtbeachtung dieser Vorkehrung können Materialschäden auftreten.
VORSICHT
• Vermeiden Sie häufiges Betätigen des Steuerschützes (vorzeitiges Altern des Filterkondensators).
• Bei Zyklen < 60 s besteht die Gefahr einer Zerstörung des Lastwiderstands.
Bei Nichtbeachtung dieser Vorkehrung können Materialschäden auftreten.
ACHTUNG
UNERWARTETER BETRIEB DES GERÄTS
• Stellen Sie sicher, dass die während des Betriebs an den Einstellungen vo rgenommenen Änderungen keine Gefahr
darstellen.
• Es ist empfehlenswert, die Änderungen bei angehaltenem Umrichter vorzunehmen.
Eine Nichtbeachtung dieser Vorkehrungen kann zum Tod oder schwerwiegenden Verletzungen führen.
Einschalten und Konfiguration des Umrichters
Getrennte Versorgung des Steuerteils
Wenn das Steuerteil des Umrichters unabhängig vom Leistungsteil versorgt wird (Klemmen P24 und 0 V), muss das Leistungsteil nach
jeder Hinzufügung einer Optionskarte und nach jedem Austausch einer Karte nur beim ersten Einschalten versorgt werden.
Bleibt dies aus, so wird die neue Karte nicht erkannt. Es besteht keine Möglichkeit, diese zu konfigurieren und der Umrichter schaltet
demzufolge mit einer Störung ab.
Leistungssteuerung über Netzschütz
Benutzereinstellung und Funktionserweiterungen
• Mit Hilfe der Anzeige und der Taster können die Einstell ungen ge ändert und die Funkt ionen e rweit ert we rden, wie auf d en nächs ten
Seiten ausführlich beschrieben.
•Die Rückkehr zur Werkseinstellung ist über das Menü [1.12 Werkseinstellung] (FCS-) möglich (siehe Seite 249).
• Drei verschiedene Parameter stehen zur Auswahl:
- Anzeige: Vom Frequenzumrichter angezeigte Werte
- Einstellung: Sowohl im Betrieb als auch bei Stillstand änderbar
- Konfiguration: Nur bei Stillstand und ohne Bremsung änderbar. Anzeige bei Betrieb möglich.
1755856 12/2009 15
Inbetriebnahme – Einleitende Empfehlungen
VORSICHT
UNERWARTETER BETRIEB DES GERÄTS
Der thermische Motorschutz wird nicht durch den Umrichter si chergestellt, wenn der Mo torstrom unterhalb des 0,2 fachen
des Umrichternennstroms liegt. Verwenden Sie daher einen anderen thermischen Schutz.
Bei Nichtbeachtung dieser Vorkehrung können Materialschäden auftreten.
VORSICHT
UNERWARTETER BETRIEB DES GERÄTS
Der thermische Motorschutz wird nicht mehr durch den Umrichter sichergestellt. Verwenden Sie für jeden Motor eine
andere thermische Schutzvorrichtung!
Bei Nichtbeachtung dieser Vorkehrung können Materialschäden auftreten.
Anlauf
Wichtig:
• In der Werkseinstellung kann der Motor in folgenden Fällen erst nach dem Rücksetzen der Befehle „Rechtslauf“, „Linkslauf“,
„Gleichstrombremsung“ wieder anlaufen:
- Beim Einschalten oder manuellen Rücksetzen oder nach einem Haltebefehl.
Andernfalls zeigt der Umrichter „nSt“ auf dem Display an, läuft aber nicht an.
• Diese Befehle werden ohne vorheriges Rücksetzen berücksichtigt, wenn die Funktion „Automatischer Wiederanlauf“ konfiguriert
wurde (Parameter [Aut. Wiederanlauf] (Atr) des Menüs [1.8-FEHLERMANAGEMENT] (FLt-) - siehe Seite
Test mit einem Motor mit geringer Leistung oder ohne Motor
• In der Werkseinstellung ist der Parameter [Verlust Motorphase] (OPL), Seite 225, aktiviert (OPL = YES). Wenn der Umrichter getestet
werden soll oder Wartungsarbeiten durchzuführen sind, ohne dass auf einen dem Umrichtermodell entsprechenden Motor zurückgegriffen
werden soll (dies gilt vor allem für Umrichter größerer Leistung), ist [Verlust Motorphase] zu deaktivieren (OPL = nO).
• Konfigurieren Sie [Typ Motorsteuerung] (Ctt) = [U/F Reg 2P] (UF2) oder [U/F Reg 5P] (UF5) (Menü [1.4 ANTRIEBSDATEN] (drC-) siehe Seite
71).
221).
Parallelbetrieb von Motoren
• Konfigurieren Sie [Typ Motorsteuerung] (Ctt) = [U/F Reg 2P] (UF2) oder [U/F Reg 5P] (UF5) (Menü [1.4 ANTRIEBSDATEN] (drC-) siehe Seite
71).
16 1755856 12/2009
Inbetriebnahme – Einleitende Empfehlungen
VORSICHT
UNERWARTETER BETRIEB DES GERÄTS
• Zum Schutz eines Motors mit niedrigerer Betriebsbemessungspannung als die Netzspannung ist zwingend der
Modus [Vector Control 2pt] (UC2) = [Ja] (Ja) ([1.4-ANTRIBSDATEN] (drC-) Menü, zu verwenden siehe Seite 73
)
• Weiterhin muß überprüft werden, ob die Höhe der DC Bus Spannung für den Motor nicht schädlich ist
(Spannungspuls des Umrichters und Isolationsspannung des Motors).
Bei Nichtbeachtung dieser Vorkehrung können Materialschäden auftreten.
ATV71pppY - Netz mit häufigem Unterspannungen
Zur Sicherstellung des optimalen Betrieb des ATV71pppY in Netzen mit häufigen Unterspannungen (Netzspannung liegt zwischen 425 V
und 446 V), ist es notwendig den Parameter [Schaltpunkt Unterspannung] (UPL) = 383 V ([1.8-FEHLER MANAGEMENT] (FLt-) Menü siehe
Seite
230) einzustellen.
Bei Verwendung eines Motors mit niedrigerer Betriebsbemessungspannung als die
Netzspannung
• Verwenden Sie [Vector Control 2pt] (UC2) = [Ja] (Ja) ([1.4-ANTRIBSDATEN] (drC-) Menü, siehe Seite 73)
1755856 12/2009 17
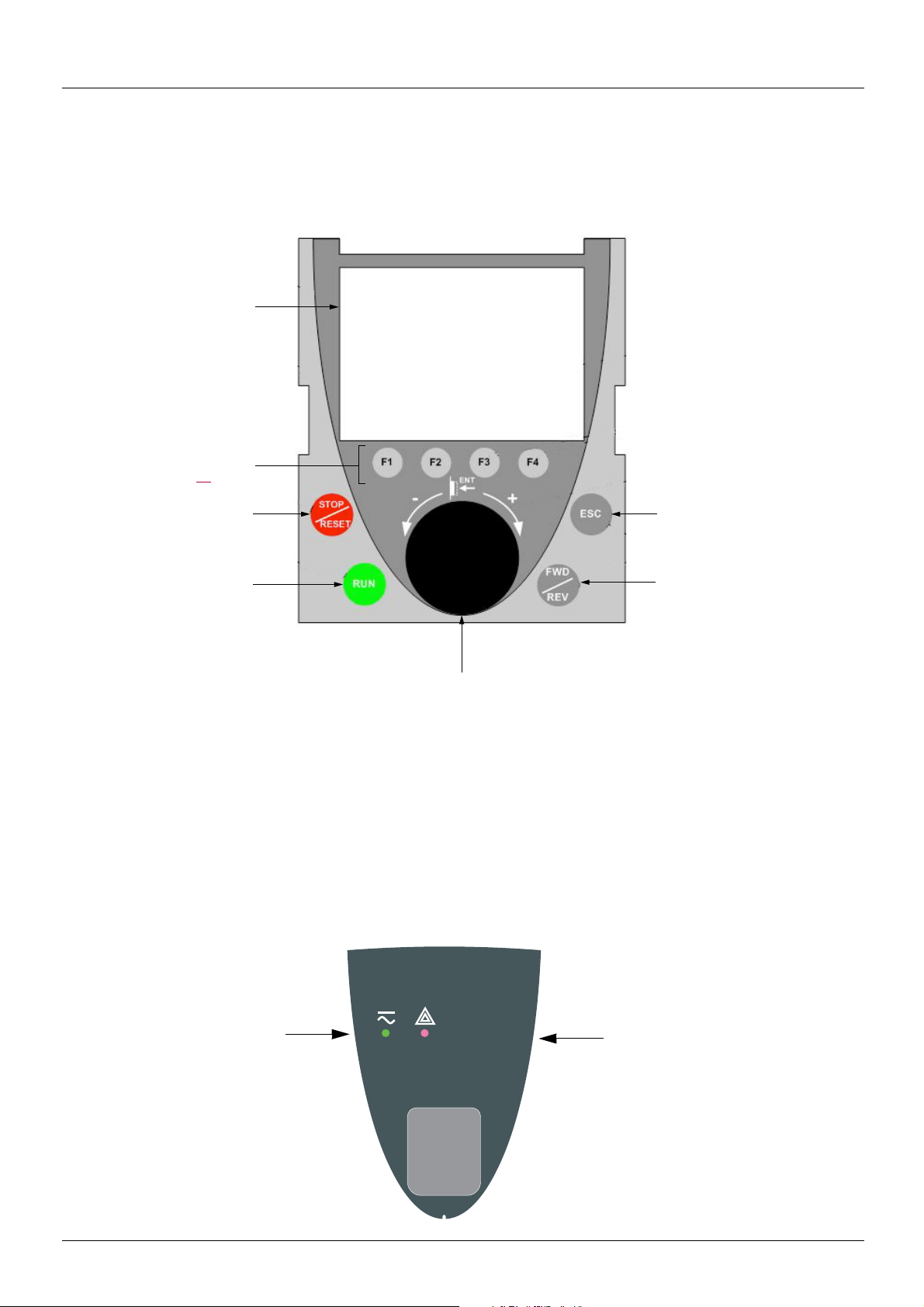
Grafikterminal
1 Grafikanzeige
2 Funktionstasten
F1, F2, F3, F4,
siehe Seite 19
3 Taste Stopp /
Löschen von
Fehlern
4 Taste RUN (Betrieb)
5 Navigationstaste:
• Drücken
(ENT):
- Speichern des aktuellen Werts
- Aufrufen des gewählten Menüs oder Parameters
• Drehen (+/-): - Inkrementieren oder Dekrementieren eines Werts
- Wechseln zur nächsten oder zur vorhergehenden Zeile
- Erhöhen oder Vermindern des Sollwerts bei
Aktivierung der Ansteuerung über das Terminal
7 Taste ESC: Verwerfen eines
Werts, Parameters oder Menüs
und Rückkehr zur vorherigen
Auswahl
6 Taste zur Umschaltung der
Drehrichtung des Motors
HMI Modbus
Grüne Kontrollleuchte:
DC-Bus unter Spannung
Rote
Kontrollleuchte:
Störung
Das Grafikterminal ist eine Option für kleine Umrichtermodelle, bei den größeren Modellen j edoch systematisch vo rhanden (siehe Katalog).
Das Terminal kann abgenommen und an einer anderen Stelle angebracht werden, beispielsweise an einer Schranktür. Verwenden Sie
hierzu die als Option erhältlichen Kabel und Zubehörteile (siehe Katalog).
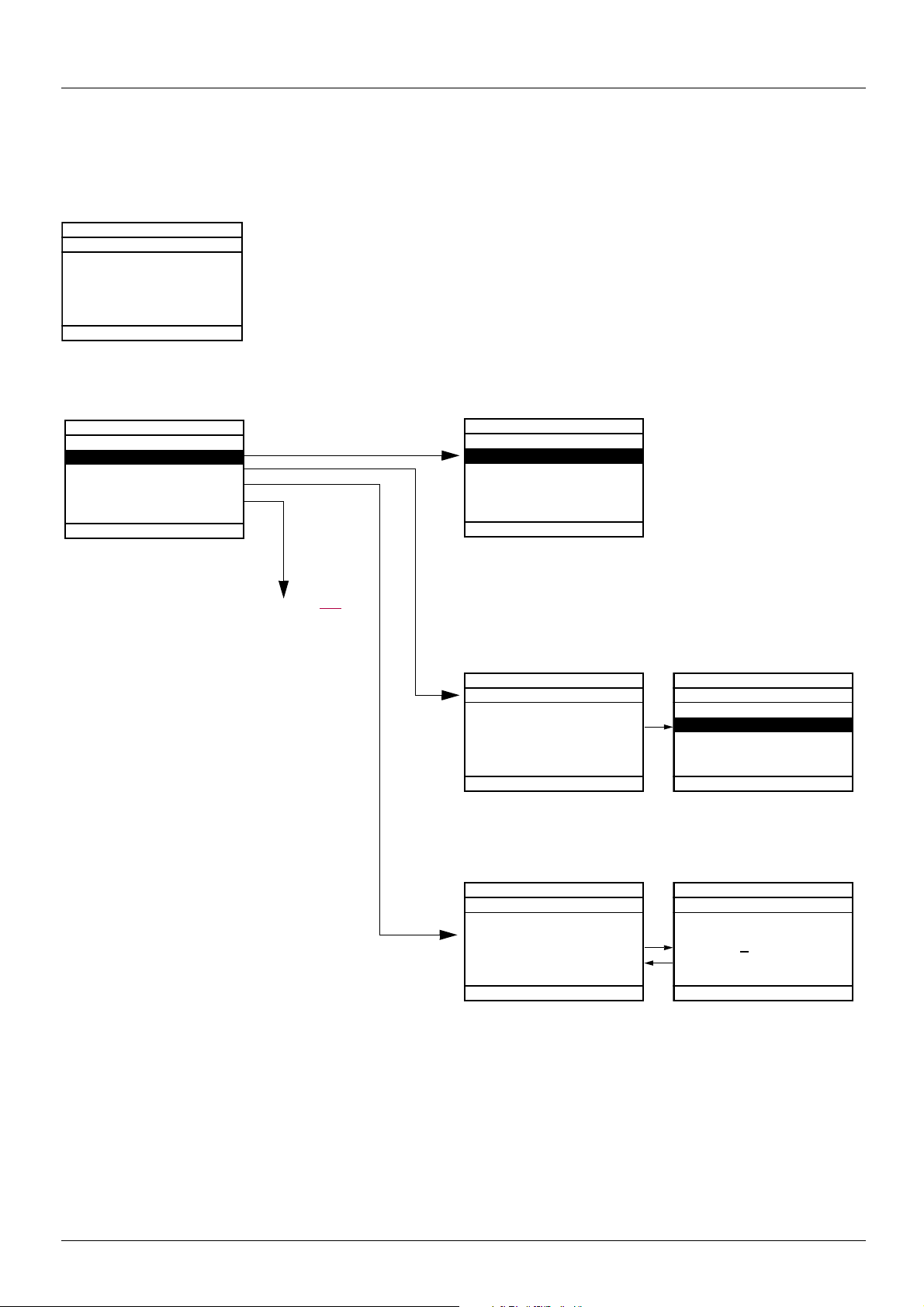
Beschreibung des Terminals
Hinweis: Bei aktivierter Terminalsteuerung kann der Umrichter direkt über die Tasten 3, 4, 5 und 6 gesteuert werden.
Abgezogenes Terminal
Ist das Terminal herausgezogen, sind an seiner Stelle 2 Kontrollleuchten sichtbar:
18 1755856 12/2009
Grafikterminal
F1 F2 F3 F4
RDY Term +0,00 Hz 0 A
1 UMRICHTER MENÜ
1.1 SCHNELLSTART MENÜ
1.2 ÜBERWACHUNG
1.3 EINSTELLUNGEN
1.4 ANTRIEBSDATEN
1.5 EIN/ AUSGÄNGE
Code << >> Quick
1
2
3
4
6
5
• Code F1
•HELP F1
• << F2
• >> F3
• Quick F4
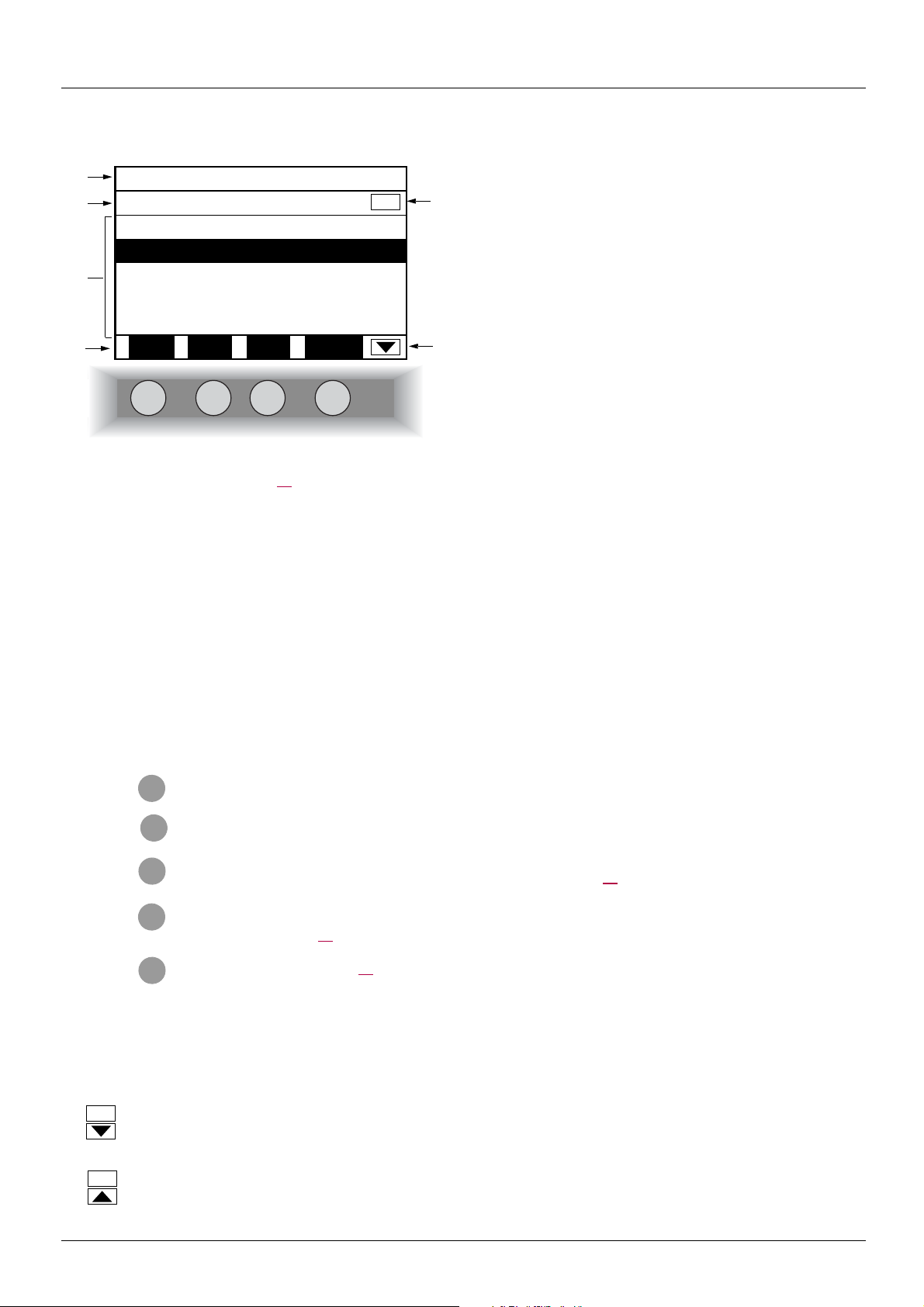
Beschreibung des Grafikterminals
1. Anzeigezeile. Der Inhalt ist konfigurierbar; die Werkseinstellung ist wie folgt:
• Umrichterzustand (siehe Seite 20)
• Steuerkanal aktiv:
- Term: Klemmenleisten
- HMI: Grafikterminal
- MDB: Integrierter Modbus
- CAN: Integrierter CANopen
- NET: Kommunikationskarte
- APP: Karte „Controller Inside”
• Sollfrequenz
• Strom im Motor
2. Menüzeile. Zeigt den Namen des aktuellen Menüs oder Untermenüs an.
3. Anzeige der Menüs, Untermenüs, Parameter, Werte, Balkendia gramme usw. in Form ein es Fensters mit Bil dlauf über max. fünf Zeilen .
Die jeweils über die Navigationstaste gewählte Zeile bzw. der gewählte Wert wird invers dargestellt.
4. Anzeige der Funktionen, die den Tasten F1 bis F4 zugeordnet sind, beispielsweise:
Die Funktionstasten sind dynamisch und kontextbezogen.
Über das Menü [1.6 STEUERUNG] können diesen Tasten weitere Funktionen (Anwendungsfunktionen) zugeordnet werd en.
Wenn eine voreingestellte Drehzahl einer Funktionstaste zugewiesen ist und die Funktionstaste gedrückt wird, läuft der Motor mit der
voreingestellten Drehzahl, bis eine andere voreingest ellte Drehzahl oder JOG gedrückt, der Drehzahlsollwert geändert oder die Stop-Taste
gedrückt wird.
5. Bedeutet, dass sich dieses Anzeigefenster unten nicht weit er fortsetzt.
Bedeutet, dass sich dieses Anzeigefenster unten weiter fortsetzt.
6. Bedeutet, dass sich dieses Anzeigefenster oben nicht weiter fortsetzt.
Bedeutet, dass sich dieses Anzeigefenster oben weiter fortsetzt.
: Anzeige des Codes des gewählten Parameters. Dieser Code entspricht der 7-Segmentanzeige.
: Kontextsensitive Hilfe.
Horizontale Navigation nach links oder Wechsel zum vorherigen Menü oder Untermenü bzw. bei einem Wert der
:
Wechsel zur höheren Ziffer. In Inversdarstellung (siehe Beispiel Seite
Horizontale Navigation nach rechts oder Wechsel zum nächsten Menü oder Untermenü (Wechsel zum Menü
[2
:
ZUGRIFFSEBENE] in diesem Beispiel) bzw. bei einem Wert Wechsel zur niedrigeren Zi ffer. In Inversdarstellung
(siehe Beispiel Seite
: Schnellzugang (siehe Seite 25).
21).
21).
1755856 12/2009 19

Grafikterminal
Zustandscodes des Umrichters:
- ACC: Hochlaufzeit
- CLI: Strombegrenzung
- CTL: Geführter Auslauf (kontr. Stopp) bei Verlust einer Netzphase
- DCB: Gleichstrombremsung (DC-Aufsch.) aktiv
- DEC: Auslaufzeit
- FLU: Magnetisierung Motor aktiv
- FST: Schnellhalt
- NLP: Leistungsteil nicht mit Spannung versorgt (keine Netzspannung an L1, L2 , L3)
- NST: Freier Auslauf
- OBR: Auslaufzeit automatisch angepasst
- PRA: Funktion „Power Removal“ aktiv (Umrichter gesperrt)
- RDY: Umrichter bereit
- RUN: Umrichter in Betrieb
- SOC: Motorschütz aktiv
- TUN: Motormessung aktiv
- USA: Alarm einer Unterspannung
20 1755856 12/2009
Grafikterminal
RDY Term +0,00 Hz 0 A
5 SPRACHE
English
Français
Deutsch
Español
Italiano
<< >> Quick
Chinese
AUSGEW. PARAMETER
1.3 EINSTELLUNGEN
Auflösung Rampe
Hochlaufzeit
Auslaufzeit
Hochlaufzeit 2
Auslaufzeit 2
Edit
RDY Term +0,00 Hz 0 A
Hochlaufzeit
9.51 s
Min = 0,01 Max = 99,99
<< >> Quick
>>
RDY Term +0,00 Hz 0 A
Hochlaufzeit
9.51 s
Min = 0,01 Max = 99,99
<< >> Quick
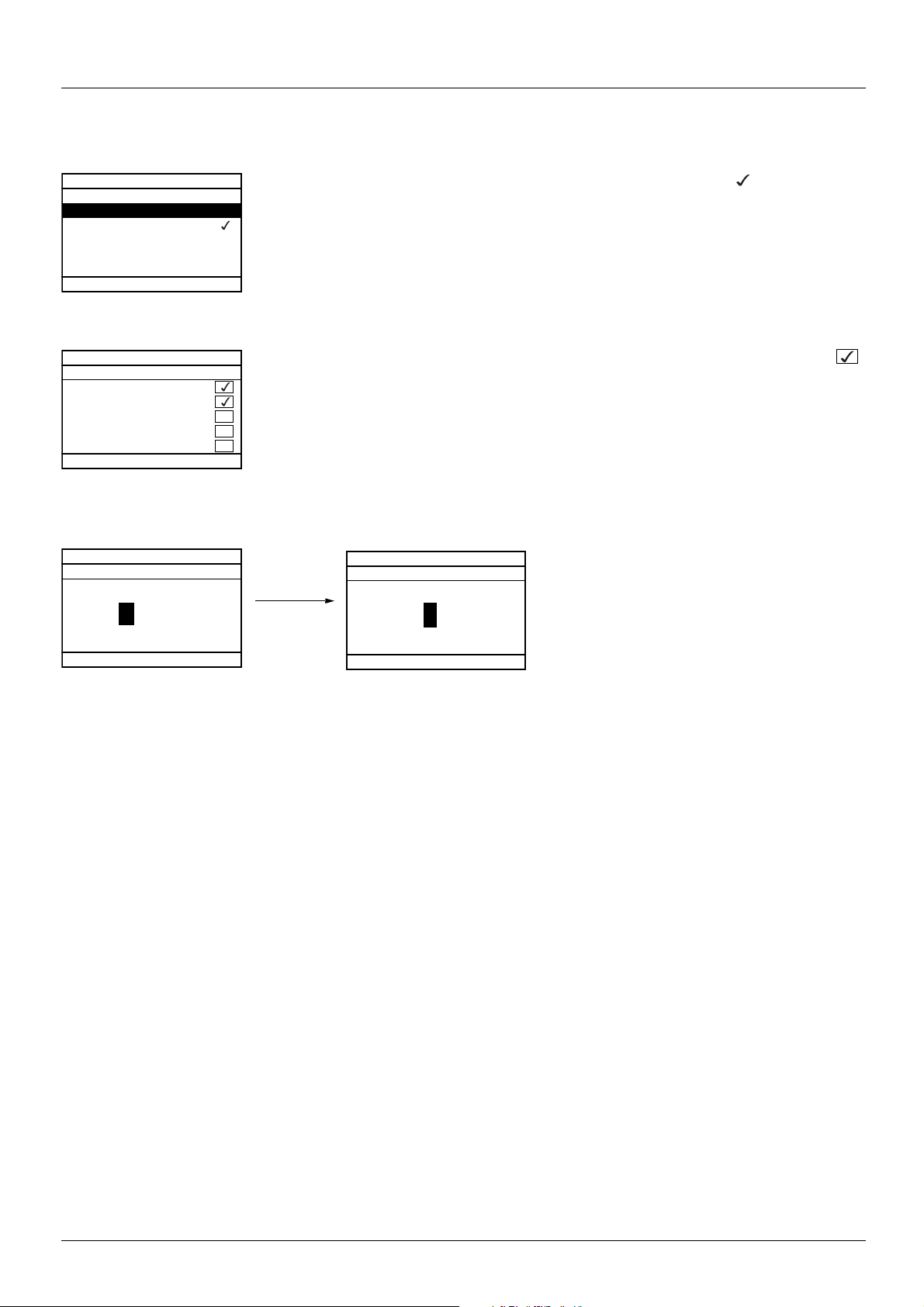
Beispiele für Konfigurationsfenster:
Wenn nur eine Wahl möglich ist, wird das gewählte Element durch das Zeichen ausgewiesen.
Beispiel: Es kann nur eine Sprache gewählt werden.
Wenn eine Mehrfachwahl möglich ist, werden die gewählten Elemente durch das Zeichen
ausgewiesen.
Beispiel: Um das [BENUTZERMENÜ] zu bilden, können mehrere Parameter gewählt werden.
Beispiel für ein Konfigurationsfenster mit einem Wert:
Die Pfeile << und >> (Tasten F2 und F3) ermöglichen die Wahl der zu ändernden Ziffer. Durch Drehen der Navigationstaste kann diese
Ziffer dann erhöht oder vermindert werden.
1755856 12/2009 21
Grafikterminal
ATV71HU22N4
2.2 kW/3 HP 380/480 V
Konfig 1
5 SPRACHE
English
Français
Deutsch
Español
Italiano
Chinese
Russian
Turkish
RDY Term +0,00 Hz 0.0 A
2 ZUGRIFFSEBENE
Basis
Standard
Erweitert
Experte
RDY Term +0,00 Hz 0.0 A
1 UMRICHTER MENÜ
1.1 SCHNELLSTART MENÜ
1.2. ÜBERWACHUNG
1.3. EINSTELLUNGEN
1.4. ANTRIEBSDATEN
1.5. EIN/ AUSGÄNGE
Code << >> Quick
RDY Term +0,00 Hz 0.0 A
HAUPTMENÜ
1 UMRICHTER MENÜ
2 ZUGRIFFSEBENE
3 LADEN/SPEICHERN ALS
4 ZUGRIFFSCODE
5 SPRACHE
Code Quick
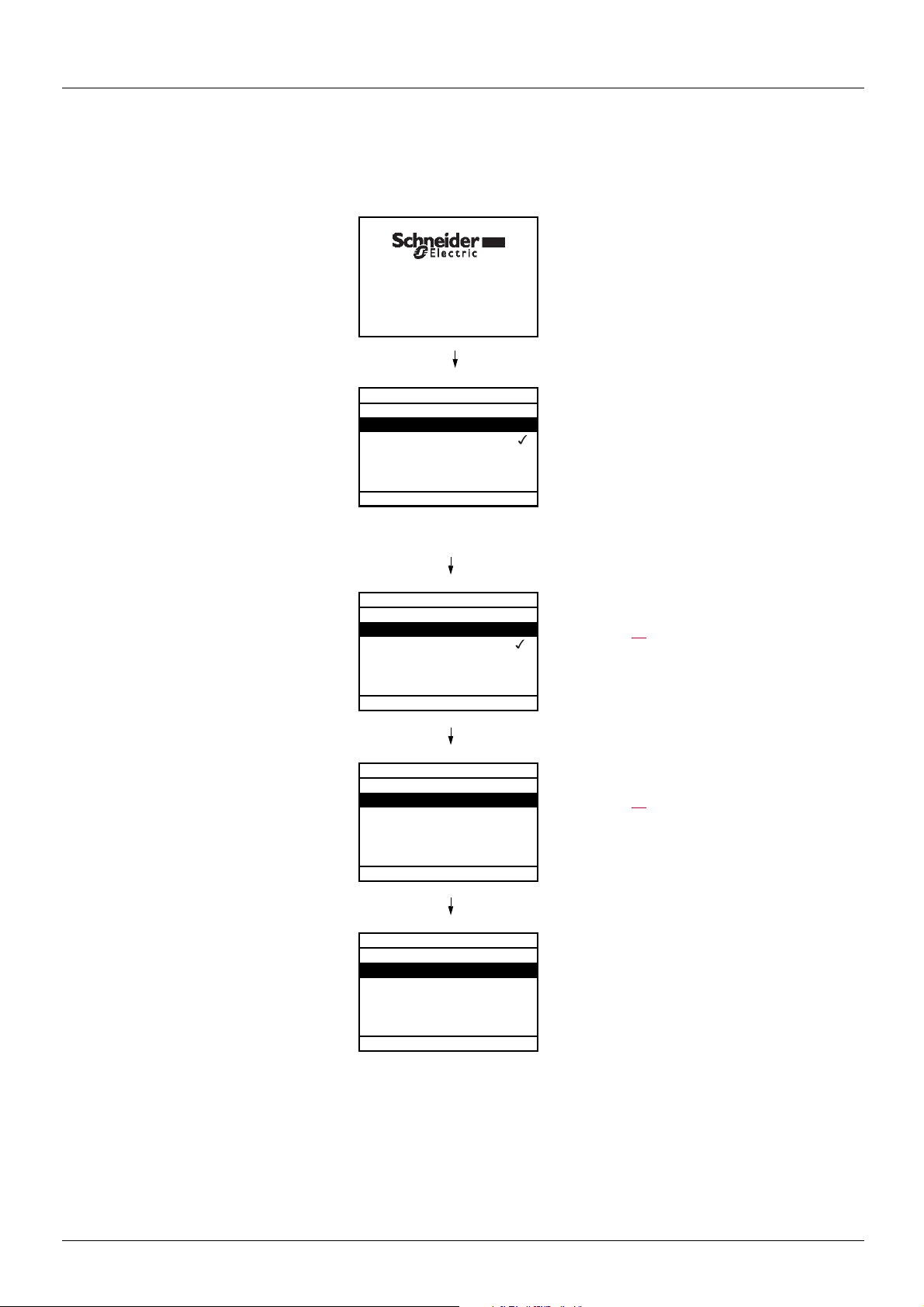
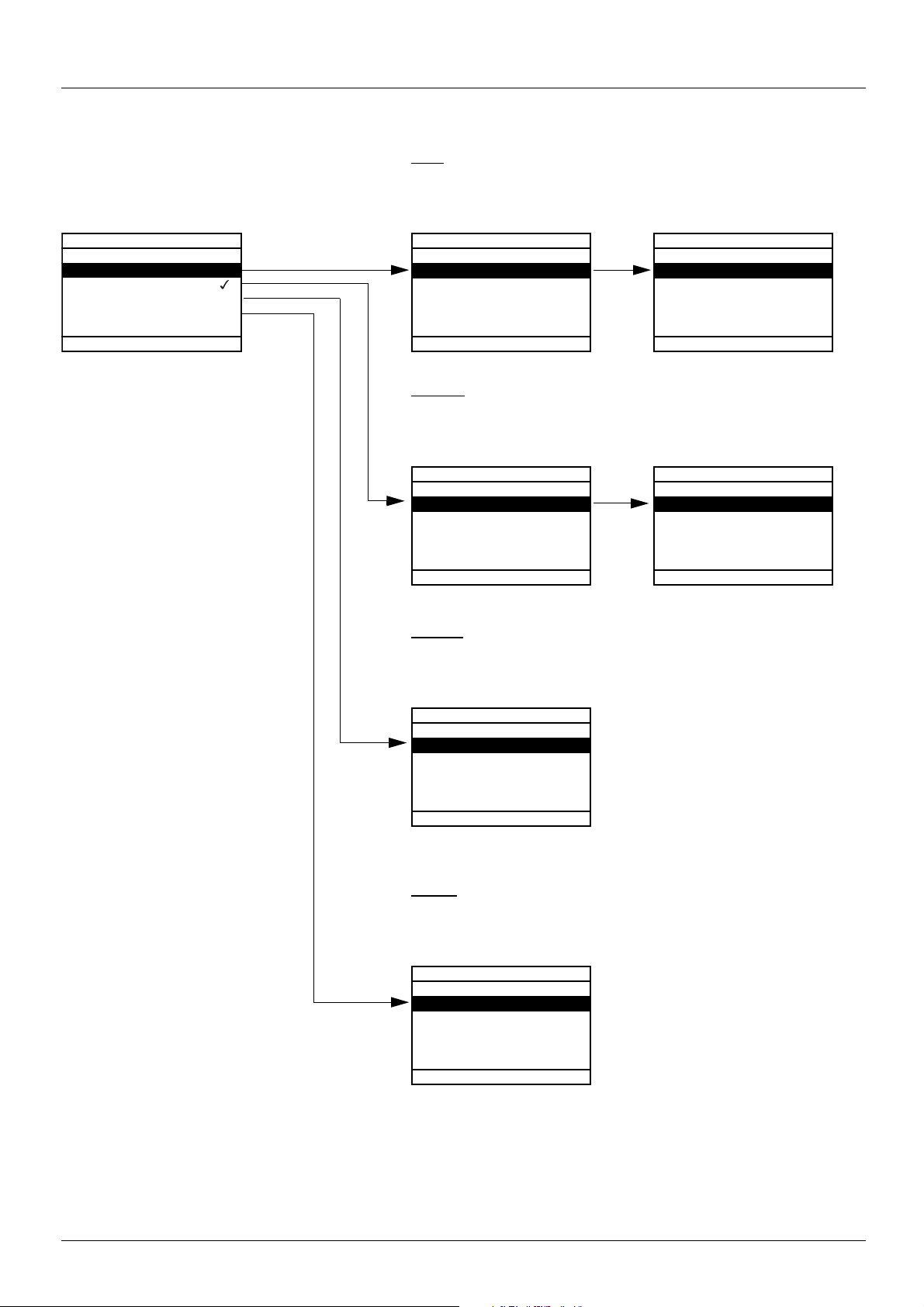
Erstes Einschalten - Menü [5 SPRACHE]
Beim ersten Einschalten ist die Navigation in den Menüs bis [1 UMRICHTER MENÜ] zur Benutzerführung vorgegeben.
Die Parameter des Untermenüs [1.1 SCHNELLSTART MENÜ] müssen konfiguriert und die Motormessung muss unbedingt vor dem Anlauf
des Motors durchgeführt werden.
Anzeige während drei Sekunden nach dem Einschalten.
3 Sekunden
Automatischer Wechsel zum Menü
[5 SPRACHE] nach drei Sekunden.
Wählen Sie die Sprache und drücken Sie ENT.
ESC
Wechsel zum Menü [2 ZUGRIFFSEBENE]
(siehe Seite 31).
Wählen Sie die Zugriffsebene und drücken Si e ENT.
Wechsel zum Menü [1 UMRICHTER MENÜ]
(siehe Seite 27).
Rückkehr zum [HAUPTMENÜ] über ESC.
22 1755856 12/2009
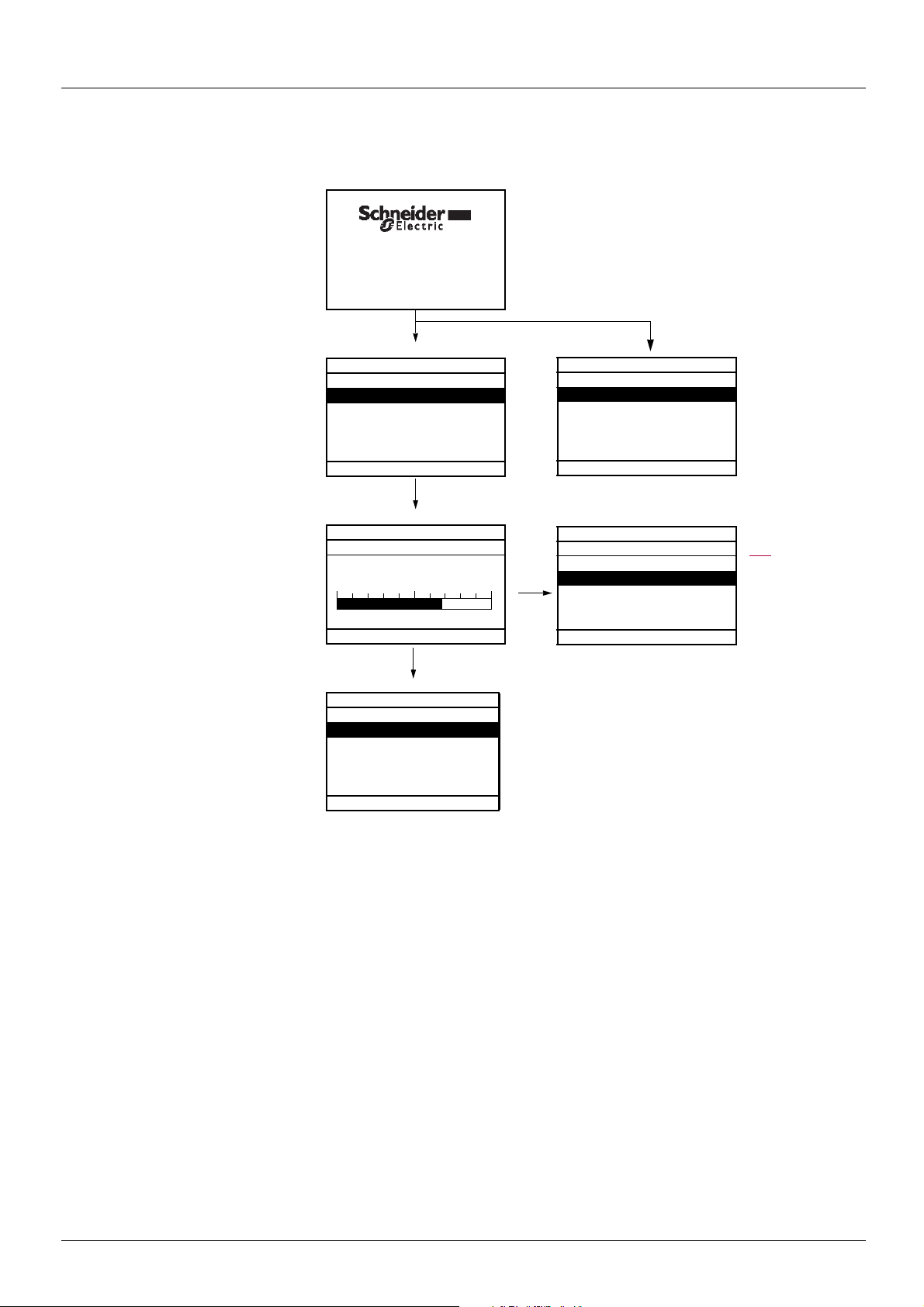
Grafikterminal
Automatischer Wechsel zum Menü
[1. UMRICHTER MENÜ] oder zu
[1.14 PROGRAMMIERBARE
KARTE] nach drei Sekunden.
Erfolgt keine Aktion, dann
automatischer Wechsel auf „Anzeig e“
nach zehn Sekunden (Anzeige
gemäß gewählter Konfiguration).
Eventuell Rückkehr zum [HAUPTMENÜ] über ENT oder über die Taste
ESC.
3 Sekunden
10 Sekunden
ESC
ATV71HU22N4
2.2 kW/3 PS 380/480 V
Konfig. Nr. 1
RDY Term +38 Hz 0 A
1. UMRICHTER MENÜ
1.1 SCHNELLSTART MENÜ
1.2 ÜBERWACHUNG
1.3 EINSTELLUNGEN
1.4 ANTRIEBSDATEN
1.5 EIN/ AUSGÄNGE
Code << >> Quick
RDY Term +38 Hz 0 A
Frequenzsollwert
Min=0 Max=60
Quick
RDY Term +38 Hz 0 A
HAUPTMENÜ
1 UMRICHTER MENÜ
2 ZUGRIFFSEBENE
3 LADEN/SPEICHERN ALS
4 ZUGRIFFSCODE
5 SPRACHE
Code Quick
38 Hz
RDY Term +0.00 Hz 0 A
1.14 PROGRAMMIERBARE KARTE
Adresse CI :17
EINST. DATUM/ STUNDE
<< >> Quick
RDY Term +0.00 Hz 0 A
1.3 EINSTELLUNGEN
Auflösung Rampe: 01
Hochlaufzeit 9,51 s
Auslaufzeit: 9.67 s
Hochlaufzeit 2: 12.58 s
Auslaufzeit 2: 13.45 s
Code << >> Quick
In [Startmenü],
266
gewähltes
Menü
ENT
oder, wenn CONTROLLER INSIDE vorhanden
Alle weiteren Einschaltvorgänge
1755856 12/2009 23
Grafikterminal
RDY Term +0,00 Hz 0 A
1 UMRICHTER MENÜ
1.1 SCHNELLSTART MENÜ
1.2 ÜBERWACHUNG
1.3 EINSTELLUNGEN
1.4 ANTRIEBSDATEN
1.5 EIN /AUSGÄNGE
Code << >> Quick
ENT
ESC
RDY Term +0,00 Hz 0 A
1.3 EINSTELLUNGEN
Auflösung Rampe: 01
Hochlaufzeit 9,51 s
Auslaufzeit: 9,67 s
Hochlaufzeit 2: 12,58 s
Auslaufzeit 2: 13,45 s
Code << >> Quick
ENT
ENT
oder
ESC
RDY Term +0,00 Hz 0 A
Hochlaufzeit
9.51 s
Min = 0,01 Max = 99,99
<< >> Quick
Programmierung: Beispiel für den Zugriff auf einen Parameter
Zugriff auf die Hochlaufzeit
Hinweis:
• Wahl des Parameters:
- Durch Drehen der Navigationstaste für den vertikalen Bildlauf.
• Änderung des Parameters:
- Wahl der zu ändernden Ziffer mit den Tasten << und >> (F2 und F3) für den horizontalen Bildlauf (die gewählte Ziffer wechselt
zu Weiß auf schwarzem Grund).
- Ändern der Ziffer durch Drehen der Navigationstaste.
• Annullieren der Änderung:
- Durch Drücken der Taste ESC.
• Speichern der Änderung:
- Durch Drücken der Navigationstaste (ENT).
24 1755856 12/2009
Grafikterminal
RDY Term +0,00 Hz 0 A
1.4 ANTRIEBSDATEN
Motorfrequenz: 50Hz IEC
Motornennleistung: 0,37 kW
Nennspannung Mot.: 206 V
Nennstrom Motor: 1.0 A
Nennfreq. Motor: 50.0 Hz
Code << >> Quick
ENT
RDY Term +0,00 Hz 0 A
SCHNELLZUGANG
RÜCKKEHR ZUM HAUPTMENÜ
DIR. ZUGANG MENÜ
10 LETZTE ÄNDERUNGEN
HMI MULTIPUNKT
Code
Siehe Seite 267
RDY Term +0,00 Hz 0 A
HAUPTMENÜ
1 UMRICHTER MENÜ
2 ZUGRIFFSEBENE
3 LADEN/SPEICHERN ALS
4 ZUGRIFFSCODE
5 SPRACHE
Code Quick
RDY Term +0,00 Hz 0 A
DIR. ZUGANG MENÜ
1.3
EINSTELLUNGEN
<< >>
ENT
RDY Term +0,00 Hz 0 A
1.3 EINSTELLUNGEN
Auflösung Rampe: 01
Hochlaufzeit 9,51 s
Auslaufzeit: 9,67 s
Hochlaufzeit 2: 12,58 s
Auslaufzeit 2: 13,45 s
Code << >> Quick
RDY Term +0,00 Hz 0 A
10 LETZTE ÄNDERUNGEN
Hochlaufzeit: 10 s
P-Anteil ENA: 1,2
Nennstrom Motor: 15 A
4. Vorwahlfrequenz 20 Hz
5. Vorwahlfrequenz: 30 Hz
Code
ESC
ENT
RDY Term +0,00 Hz 0 A
Nennstrom Motor
15.0 A
<< >>
Schnellzugang
Sie können von jedem beliebigen Bildschirm aus schnell a uf einen Parameter zugreifen, wenn die Funktion „Quick“ über der T aste F4 angezeigt wird.
Beispiel:
Durch Drücken der Taste F4 wird ein Schnellzugangsfenster
geöffnet, das vier Möglichkeiten bietet.
• [HOME]: Rückkehr zum [HAUPTMENÜ].
• DIREKTER ZUGANG MENÜ Nr. : Öffnung des Fensters „DIREKTER
ZUGANG MENÜ Nr.“ mit Anzeige von „1“. Über die Tasten << und >>
(F2 und F3) können Sie eine Nummer wählen oder die Nummer mit
der Navigationstaste inkrementieren bzw. dekrementieren : 1.3 im
untenstehenden Beispiel.
• [10 LETZTE ÄNDERUNGEN]: Öffnung eines Fensters, das den
direkten Zugriff auf die zehn zuletzt geänderten Parameter ermöglicht.
1755856 12/2009 25
Grafikterminal
RDY Term +0,00 Hz 0 A
HAUPTMENÜ
1 UMRICHTER MENÜ
2 ZUGRIFFSEBENE
3 LADEN/SPEICHERN ALS
4 ZUGRIFFSCODE
5 SPRACHE
Code Quick
6 AUSWAHL ANZEIGETYP
7 ANZEIGE KONFIG.
RDY Term +0,00 Hz 0 A
1 UMRICHTER MENÜ
1.1 SCHNELLSTART MENÜ
1.2 ÜBERWACHUNG
1.3 EINSTELLUNGEN
1.4 ANTRIEBSDATEN
1.5 EIN/ AUSGÄNGE
Code << >> Quick
1.6 STEUERUNG
1.7 APPLIKATIONS-FKT.
1.8 FEHLERMANAGEMENT
1.9 KOMMUNIKATION
1.10 DIAGNOSE
1.11 IDENTIFIKATION
1.12 WERKSEINSTELLUNG
1.13 BENUTZERMENÜ
1.14 MENÜ PROG. KARTE
[HAUPTMENÜ] - Übersicht der Menüs
Inhalt des Menüs [HAUPTMENÜ]
[1 UMRICHTERMENÜ] Siehe nächste Seite
[2 ZUGRIFFSEBENE] Definition des Zugriffs auf die Menüs (Komplexitätsniveau)
[3 LADEN / SPEICHERN ALS] Möglichkeit zur Sicherung und Wiederherstellung der Umrichter-Konfigurationsdateien
[4 ZUGRIFFSCODE] Schutz der Konfiguration durch einen Zugriffscode
[5 SPRACHE] Wahl der Sprache
[6 AUSWAHL ANZEIGETYP] Anpassung der angezeigten Daten auf dem Grafikterminal bei Betrieb
[7 ANZEIGE KONFIG.] • Anpassung der Parameter
• Erstellung eines benutzerdefinierten Menüs
• Anpassung der Sichtbarkeit und des Schutzes der Menüs und der Parameter
26 1755856 12/2009
Grafikterminal
[1 UMRICHTERMENÜ]
RDY Term +0,00 Hz 0 A
1 UMRICHTER MENÜ
1.1 SCHNELLSTART MENÜ
1.2 ÜBERWACHUNG
1.3 EINSTELLUNGEN
1.4 ANTRIEBSDATEN
1.5 EIN/ AUSGÄNGE
Code << >> Quick
1.6 STEUERUNG
1.7 APPLIKATIONS-FKT.
1.8 FEHLERMANAGEMENT
1.9 KOMMUNIKATION
1.10 DIAGNOSE
1.11 IDENTIFIKATION
1.12 WERKSEINSTELLUNG
1.13 BENUTZERMENÜ
1.14 MENÜ PROG. KARTE
Inhalt des Menüs [1 UMRICHTERMENÜ]
[1.1 SCHNELLSTART]: Vereinfachtes Menü zur schnellen Inbetriebnahme
[1.2 ÜBERWACHUNG]: Anzeige der aktuellen Werte, Motoren und Ein-/Ausgänge
[1.3 EINSTELLUNGEN]: Einstellparameter, die während des Betriebs geändert werden können.
[1.4 ANTRIEBSDATEN]: Motorparameter (Motortypenschild, Motormessung, Taktfrequenz, Befehlsalgorithmen usw.)
[1.5 EIN-/AUSGÄNGE]: Konfiguration der Ein-/Ausgänge (S kalierung, Filterung, 2-Draht-Steueru ng, 3-Draht-Steuerung usw.)
[1.6 STEUERUNG]: Konfiguration der Befehls- und Sollwertkanäle (Terminal, Klemmenleisten, Bus usw.)
[1.7 APPLIKATIONS-FKT.] : Konfiguration der Anwendungsfunktionen (z. B. Vorwahlfrequenzen, PID-Regler, Bremslogik usw.)
[1.8 FEHLERMANAGEMENT]: Konfiguration der Fehlerbehandlung
[1.9 KOMMUNIKATION]: Kommunikationsparameter (Feldbus)
[1.10 DIAGNOSE]: Di agnose des Motors / Umrichters
[1.11 IDENTIFIKATION]: Identifikation des Umrichters und der internen Optionen
[1.12 WERKSEINSTELLUNG]: Zugriff auf die Konfigurationsdateien und Rückkehr zur Werkseinstellung
[1.13 BENUTZERMENÜ]: Spezielles Menü, das durch den Benutzer im Menü [7 ANZEIGE KONFIG.] zusammengestellt wird.
[1.14 MENÜ PROG. KARTE] : Konfiguration der Optionskarte „Controller Inside“
1755856 12/2009 27

Integriertes Terminal
• 4-stellige
7-Segmentanzeige
• Aufruf eines Menüs oder
Parameters oder Speicherung
des Parameters oder des
angezeigten Werts
• Wechsel zum
vorherigen Menü oder
Parameter oder
Erhöhen des
• Verlassen eines Menüs oder
Parameters oder Rückkehr
vom angezeigten zum zuletzt
gespeicherten Wert
• Wechsel zum
nächsten Menü oder
Parameter oder
Verringerung des
• 2 Zustandsanzeigen
CANopen
• 2 Zustandsanzeigen
Modbus
Hinweis:
Die kleineren Modelle Altivar 71 (siehe Katalog) enthalten ein montiertes Terminal mit einer vierstelligen 7-Segmentanzeige. Sie sind
ebenfalls zur Aufnahme des auf den vorhergehenden Seiten beschriebenen (optionalen) Grafikterminals konzipiert.
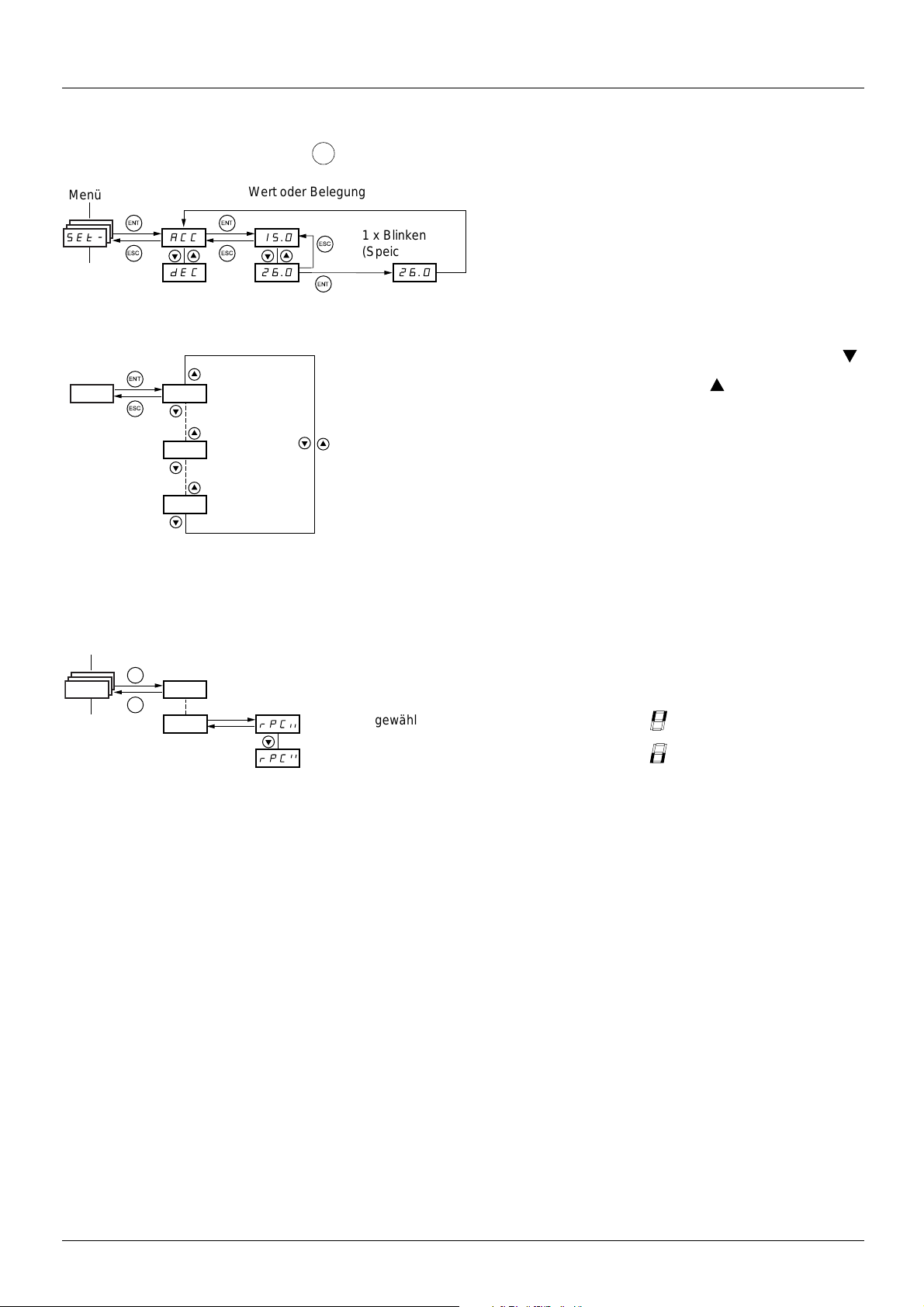
Funktionen der Anzeige und der Tasten
• Über oder erfolgt keine Speicherung der Auswahl.
• Längeres Drücken (>2 s) von oder bewirkt einen Schnelldurchlauf.
Speicherung, Aufzeichnung der angezeigten Auswahl: ENT
Während der Speicherung blinkt die Anzeige.
Normalanzeige ohne Störung und außer Betrie b:
- 43.0 : Anzeige des gewählten Parameters im Menü SUP- (Voreinstellung: Moto rfrequenz)
- CLI: Strombegrenzung
- CtL: Geführter Auslauf (Kontr. Stopp) bei Verlust einer Netzphase
- dCb: Bremsung mit DC-Aufschaltung erfolgt
- FLU: Magnetisierung Motor aktiv
- FSt: Schnellhalt
- nLP: Leistungsteil nicht mit Spannung versorgt (keine Netzspannung an L1, L2, L3)
- nSt: Freier Auslauf
- Obr: Auslaufzeit automatisch angepasst
- PrA: Funktion „Power Removal“ aktiv (Umrichter gesperrt)
- rdY: Umrichter bereit
- SOC: Motorschütz aktiv
- tUn: Motormessung aktiv
- USA: Alarm einer Unterspannung
Eine Störung wird durch Blinken angezeigt.
28 1755856 12/2009
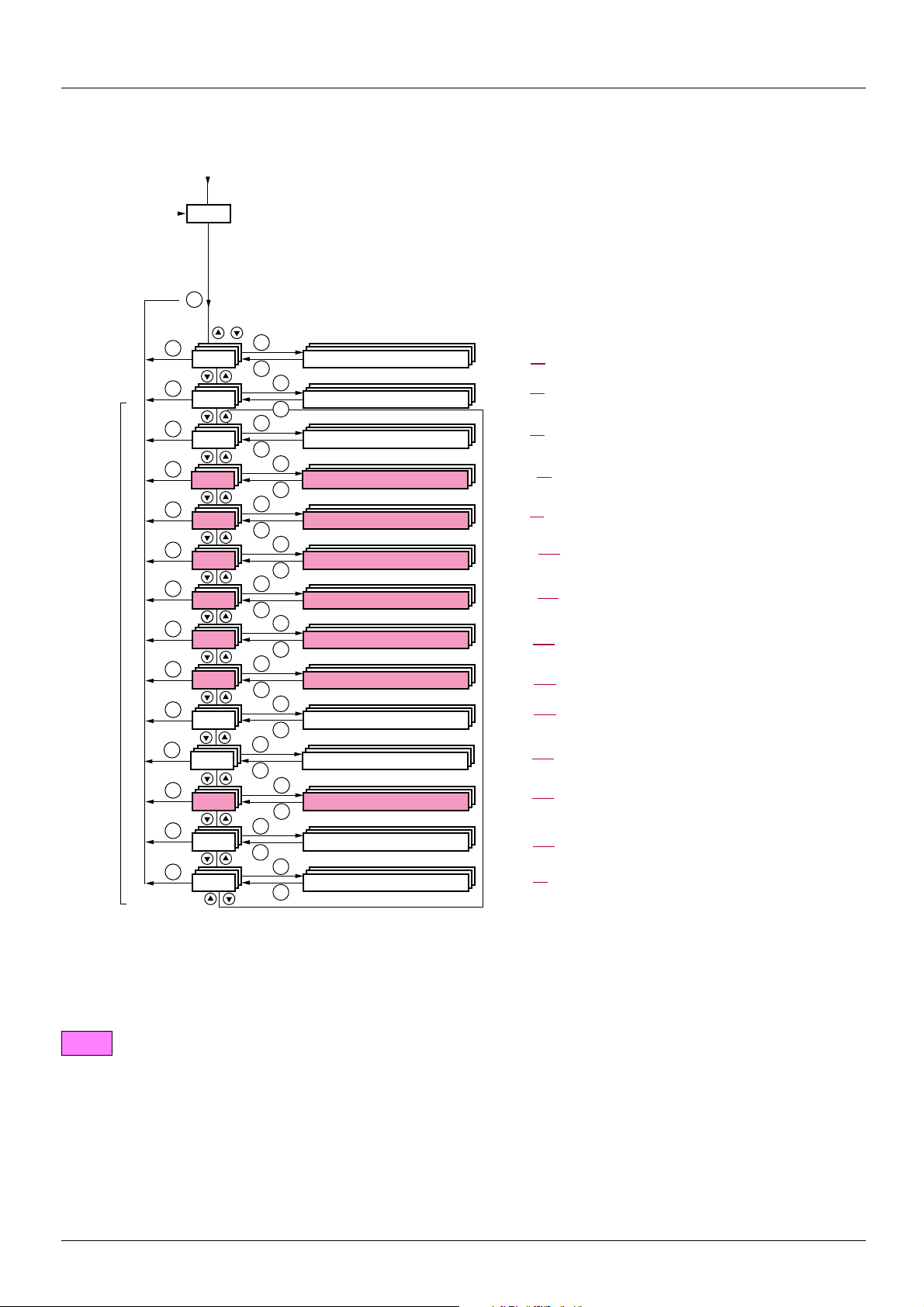
Integriertes Terminal
XXX
CtL-
FUn-
SIM-
I-O-
SEt-
SUP-
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ENT
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
FCS-
LAC-
CON-
FLt-
ESC
ESC
ESC
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
SPL-
ESC
ENT
ESC
drC-
COd-
USr-
ESC
ENT
ESC
Anzeige des Zustands des Umrichters
EINSTELLUNGEN
APPLIKATIONS-FKT.
EIN/ AUSGÄNGE
FEHLERMANAGEMENT
SCHNELLSTART MENÜ
Menüs
ÜBERWACHUNG
ANTRIEBSDATEN
STEUERUNG
Einschalten
WERKSEINSTELLUNG
ZUGRIFFSCODE
ZUGRIFFSEBENE
KOMMUNIKATION
(Seite 54) Einstellparameter, die wä hrend des Betriebs geändert
werden können.
(Seite 129
) Konfiguration der Anwendungsfunktionen (z. B.
Vorwahlfrequenzen, PID-Regler, Bremslogik usw.)
(Seite 88
) Konfiguration der Ein-/Ausgänge (Skalierung, Filterung,
2-Draht-Steuerung, 3-Draht-Steuerung usw.)
(Seite 217
) Konfiguration der Fehlerbehandlung
(Seite 37
) Vereinfachtes Menü zur schnellen Inbetriebnahme
(Seite 45
) Anzeige der aktuellen Werte, Motoren und Ein-/Ausgänge
(Seite 70
) Motorparameter (Motortypenschild, Motormessung,
Taktfrequenz, Befehlsalgorithmen usw.)
(Seite 116
) Konfiguration der Befehls- und Sollwertkanäle
(Terminal, Klemmenleisten, Bus usw.)
(Seite 249
) Zugriff auf die Konfigurationsdateien und
Rückkehr zur Werkseinstellung
(Seite 256
)
(Seite 31
)
(Seite 242
) Kommunikationsparameter (Feldbus)
(Seite 252
) Spezifisches Menü, das durch den Benutzer mit Hilf e
des Grafikterminals zusammengestellt wird.
BENUTZERMENÜ
MENÜ PROG. KARTE
(Seite 253
) Menü der Karte „Controller Inside“ (sofern vorhanden)
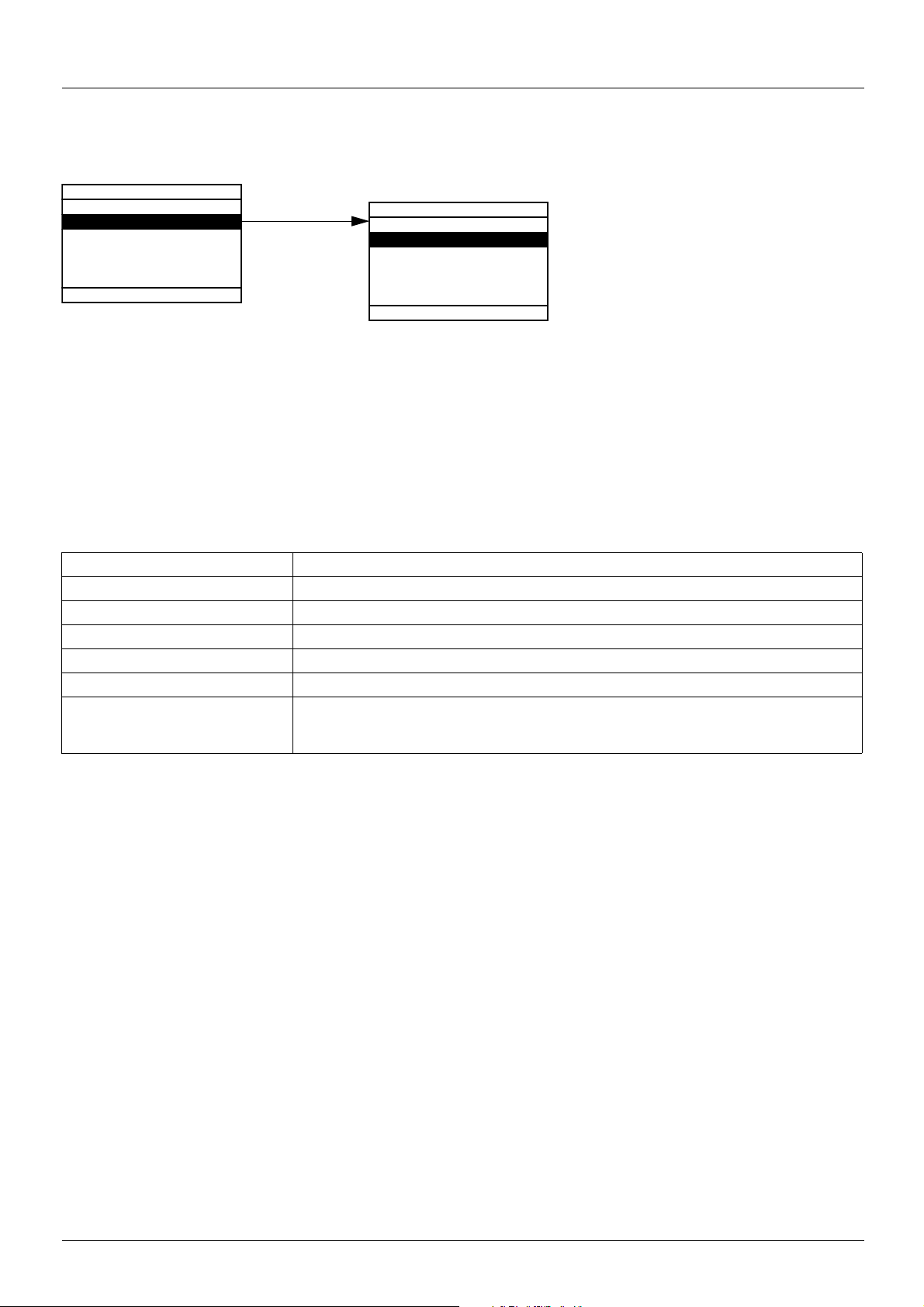
Zugriff auf die Menüs
Die Menücodes unterscheiden sich von den Parametercodes durch einen Bindestrich auf der rechten Seite.
Beispiele: Menü FUn-, Parameter ACC.
1755856 12/2009 29
Grau unterlegte Menüs können je nach der Konfiguration der Zugriffsebene LAC nicht aufgerufen werden.
Integriertes Terminal
ENT
ACC 15.0
ENT
ESC
ENT
ESC
26.0 26.0
ESC
dEC
ENT
SEt-
Menü
Wert oder Belegung
1 x Blinken
(Speicherung)
Parameter
(Nächster Parameter)
ENT
ESC
1
.
n-tes
letztes
Menü
ENT
ESC
I-O-
Alarm nicht gewählt
Alarm gewählt
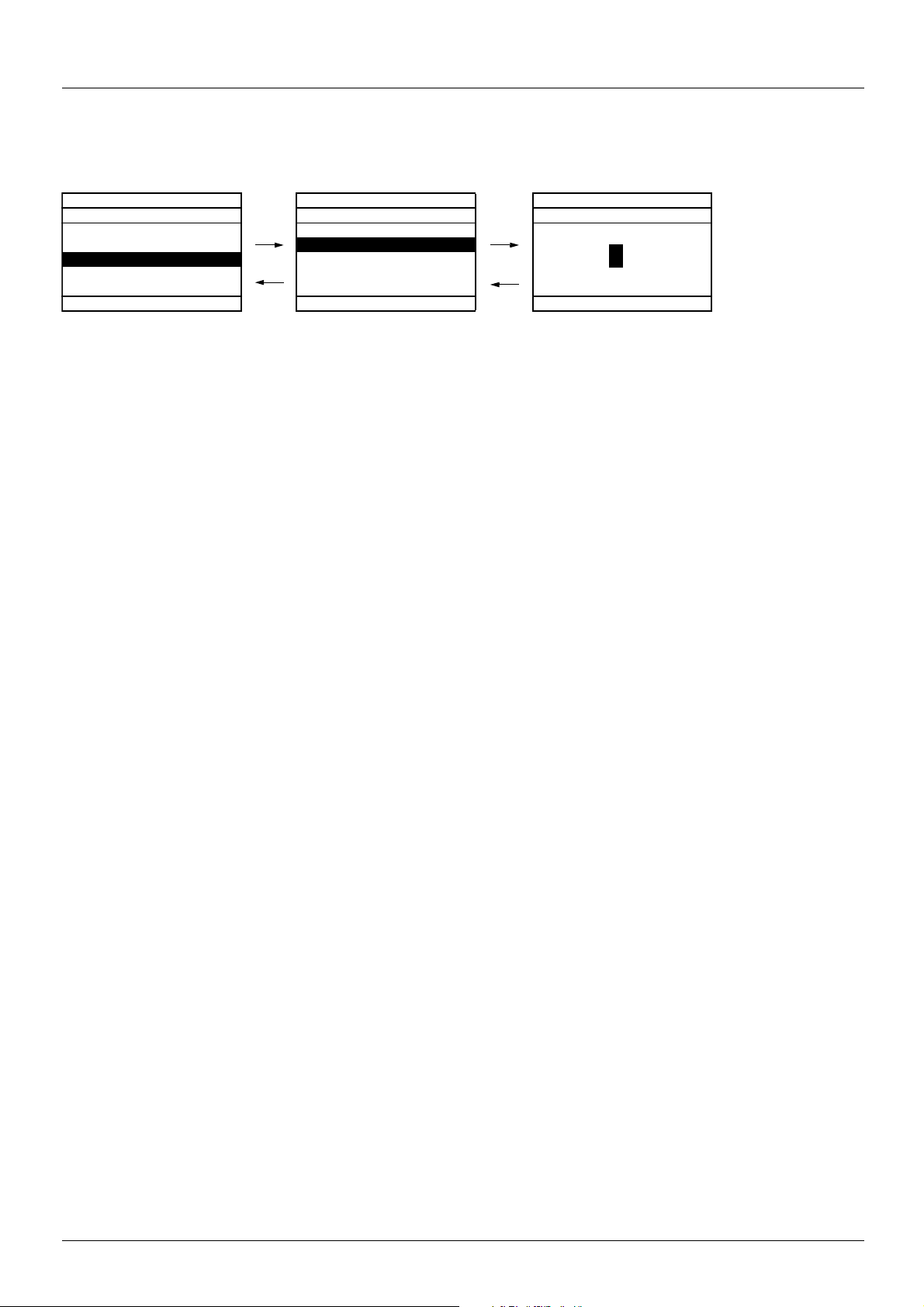
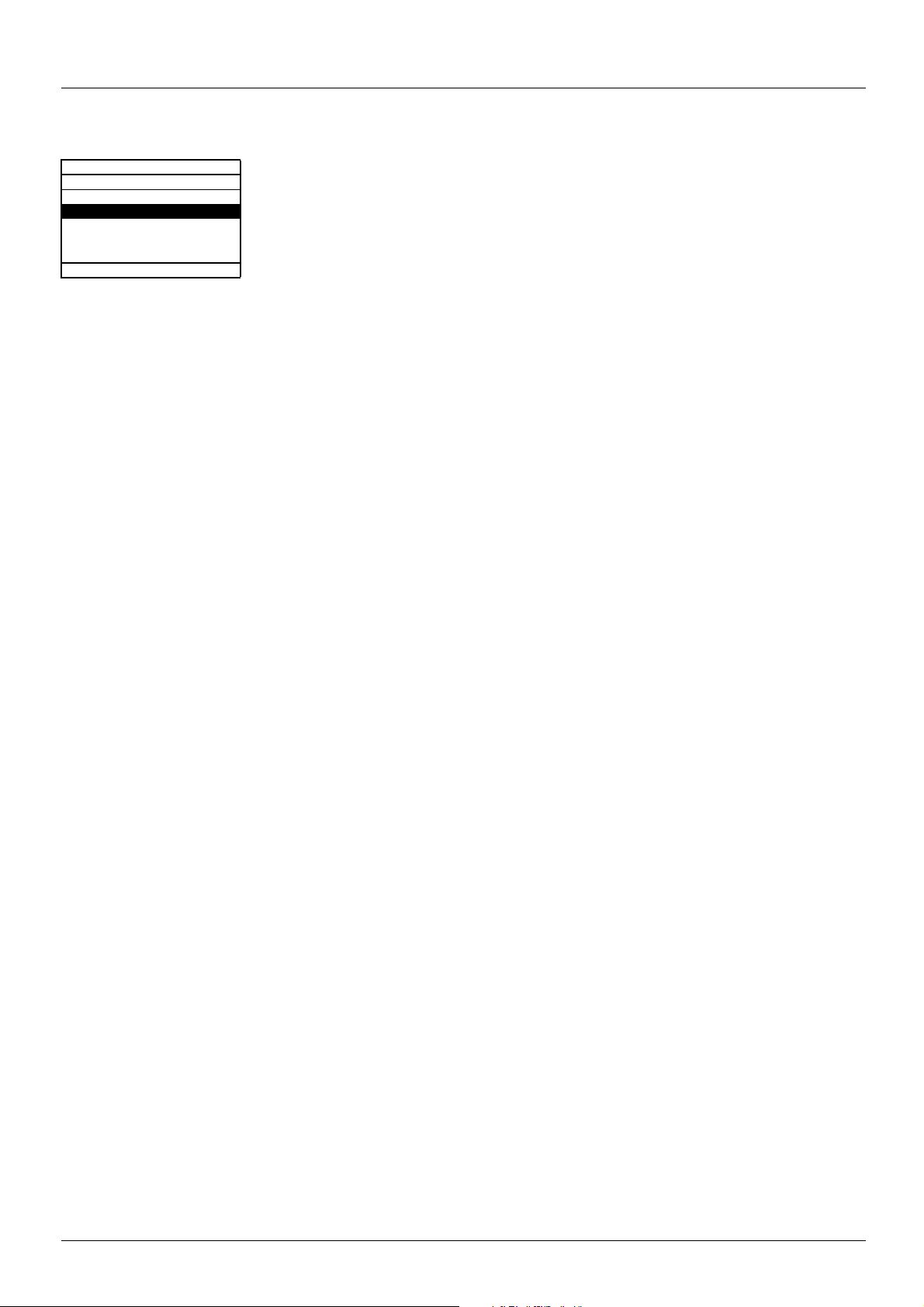
Zugriff auf die Menüparameter
Speicherung der angezeigten Auswahl:
Während der Speicherung blinkt die Anzeige.
Alle Menüs sind Dropdown-Menüs, d. h., wenn nach dem le tzt en Paramet er erneut
gedrückt wird, ist der Zugriff auf den ersten Parameter möglich. Desgleichen ist der
Zugriff vom ersten auf den letzten Parameter möglich, wenn
gedrückt wird.
Wahl mehrerer Zuordnungen für einen Parameter
Beispiel: Liste der Alarme der Gruppe 1 im Menü [EIN/
AUSGÄNGE] (I-O-)
Es können mehrere Alarme gewählt werden. Hierzu sind diese
wie folgt zu aktivieren:
Die rechte Stelle zeigt an: Auswahl
Keine Auswahl
Dieses Prinzip gilt für jede Mehrfachauswahl.
30 1755856 12/2009
[2 ZUGRIFFSEBENE] (LAC-)
RDY Term +0,00 Hz 0 A
2 ZUGRIFFSEBENE
Basis
Standard
Erweitert
Experte
<< >> Quick
RDY Term +0,00 Hz 0 A
HAUPTMENÜ
1 UMRICHTER MENÜ
2 ZUGRIFFSEBENE
3 LADEN/SPEICHERN ALS
4 ZUGRIFFSCODE
5 SPRACHE
Code << >> Quick
RDY Term +0,00 Hz 0 A
1. UMRICHTER MENÜ
1.1 SCHNELLSTART MENÜ
1.2. ÜBERWACHUNG
1.3. EINSTELLUNGEN
1.11. IDENTIFIKATION
1.12. WERKSEINSTELLUNG
Code << >> Quick
1.13 BENUTZERMENÜ
RDY Term +0,00 Hz 0 A
HAUPTMENÜ
1 UMRICHTER MENÜ
2 ZUGRIFFSEBENE
3 LADEN/SPEICHERN ALS
4 ZUGRIFFSCODE
5 SPRACHE
Code Quick
6 AUSWAHL ANZEIGETYP
RDY Term +0,00 Hz 0 A
1 UMRICHTER MENÜ
1.1 SCHNELLSTART MENÜ
1.2 ÜBERWACHUNG
1.3 EINSTELLUNGEN
1.4 ANTRIEBSDATEN
1.5 EIN/ AUSGÄNGE
Code << >> Quick
1.6 STEUERUNG
1.7 APPLIKATIONS-FKT.
1.8 FEHLERMANAGEMENT
1.9 KOMMUNIKATION
1.10 DIAGNOSE
1.11 IDENTIFIKATION
1.12 WERKSEINSTELLUNG
1.13 BENUTZERMENÜ
1.14 MENÜ PROG. KARTE
RDY Term +0,00 Hz 0 A
HAUPTMENÜ
1 UMRICHTER MENÜ
2 ZUGRIFFSEBENE
3 LADEN/SPEICHERN ALS
4 ZUGRIFFSCODE
5 SPRACHE
Code Quick
6 AUSWAHL ANZEIGETYP
7 ANZEIGE KONFIG.
RDY Term +0,00 Hz 0 A
HAUPTMENÜ
1 UMRICHTER MENÜ
2 ZUGRIFFSEBENE
3 LADEN/SPEICHERN ALS
4 ZUGRIFFSCODE
5 SPRACHE
Code Quick
6 AUSWAHL ANZEIGETYP
7 ANZEIGE KONFIG.
Mit Grafikterminal:
Basis
Zugriff auf nur fünf Menüs und sechs Untermenüs im
Menü [1 UMRICHTER MENÜ].
Jedem Eingang kann nur eine Funktion zugeordnet werden.
Standard
Dies ist die Ebene der Werkseinstellung. Sie haben Zugriff auf sechs Menüs
und alle Untermenüs im Menü [1 UMRICHTERMENÜ].
Jedem Eingang kann nur eine Funktion zugeordnet werden.
1755856 12/2009 31
Erweitert
Zugriff auf alle Menüs und Untermenüs.
Jedem Eingang können mehrere
Funktionen zugeordnet werden.
Experte
Zugriff auf alle Menüs und Untermenüs wie für die Ebene [Erweitert] sowie
Zugriff auf zusätzliche Parameter.
Jedem Eingang können mehrere Funktionen zugeordnet werden.

[2 ZUGRIFFSEBENE] (LAC-)
XXX
SIM-
ESC
ESC
ENT
LAC-
ESC
ENT
ESC
COd-
Anzeige des Zustands des Umrichters
ZUGRIFFSEBENE
Einschalten
Mit integriertem Terminal:
Code Name/Beschreibung Werkseinstellung
LAC-
bAS
• bAS: Begrenzter Zugriff auf die Menüs SIM, SUP, SEt, FCS, USr, COd und LAC. Jedem Eingang kann nur eine
Std
Funktion zugeordnet werden.
Std
Adu
Epr
• Std: Zugriff auf alle Menüs des integriert en Terminals. Jede m Eingang kann nur eine Funkti on zugeordnet werden.
• AdU: Zugriff auf alle Menüs des integrierten Terminals. Jedem Eingang können mehrere Funktionen zugeordnet werden.
• EPr: Zugriff auf alle Menüs des integrierten Terminals sowie auf zusätzliche Parameter. Jedem Eingang können
mehrere Funktionen zugeordnet werden.
32 1755856 12/2009

[2 ZUGRIFFSEBENE] (LAC-)
Vergleich Grafikterminal / Integriertes Terminal, zugängliche Menüs
Grafikterminal Integriertes Terminal Zugriffsebene
[2 ZUGRIFFSEBENE] LAC- (Zugriffsebene)
[3 LADEN/SPEICHERN ALS] [4 ZUGRIFFSCODE] COd- (Zugriffscode)
[5 SPRACHE] [1 UMRICHTERMENÜ] [1.1 SCHNEL LSTART] SIM- (Schnellstart)
[1.2 ÜBERWACHUNG] SUP-(Überwachung)
[1.3 EINSTELLUNGEN] SEt- (Einstellungen)
[1.11 IDENTIFIKATION] [1.12 WERKSEINSTELLUNG] FCS- (Werkseinstellung)
[1.13 BENUTZERMENÜ] USr- (Benutzermenü)
Jedem Eingang kann nur eine Funktion zugeordnet werden. Jedem Eingang kann nur eine
Funktion zugeordnet werden.
[1.4 ANTRIEBSDATEN] drC- (Antriebsdaten)
[1.5 EIN-/AUSGÄNGE] I-O- (E/A-Konfiguration)
[1.6 STEUERUNG] CtL- (Steuerung)
[1.7 APPLIKATIONS-FKT.] FUn- (Anwendungsfunktionen)
[1.8 FEHLERMANAGEMENT] FLt- (Fehlermanagement)
[1.9 KOMMUNIKATION] COM- (Kommunikation)
[1.10 DIAGNOSE] [1.14 MENÜ PROG. KARTE] (1) PLC-(Karte „Controller Inside”) (1)
[6 AUSWAHL ANZEIGETYP] -
Jedem Eingang kann nur eine Funktion zugeordnet werden. Jedem Eingang kann nur eine
Funktion zugeordnet werden.
[7 ANZEIGE KONFIG.] -
Jedem Eingang können mehrere Funktionen zugeordnet
werden.
Parameter Expertenmodus Parameter Expertenmodus
Jedem Eingang können mehrere Funktionen zugeordnet
werden.
Jedem Eingang können mehrere
Funktionen zugeordnet werden.
Jedem Eingang können mehrere
Funktionen zugeordnet werden.
Basis bAS
Standard Std(Werkseinstellung)
Erweitert AdU
Experte EPr
(1)Zugänglich, wenn die Karte „Controller Inside“ vorhanden ist.
1755856 12/2009 33

Struktur der Parametertabellen
5
2
3
1
4
6
8
7
1. Name des Menüs auf der vierstelligen 7-Segmentanzeige
2. Code des Untermenüs auf der vierstelligen 7-Segmentanzeige
3. Code des Parameters auf der vierstelligen 7-Segmentanzeige
4. Wert des Parameters auf der vierstelligen 7-Segmentanzeige
5. Name des Menüs auf dem Grafikterminal
6. Name des Untermenüs auf dem Grafikterminal
7. Name des Parameters auf dem Grafikterminal
8. Wert des Parameters auf dem Grafikterminal
Die in der Beschreibung der verschiedenen Menüs enthaltenen Parametertabellen können ebenso im Grafikterminal wie im integrierten
Terminal verwertet werden. Sie enthalten demgemäß die Bezeichnungen dieser beiden Terminals wie nachstehend aufgeführt.
Beispiel:
[1.7 APPLIKATIONS-FKT.] (FUn-)
Code Name/Beschreibung Einstellbereich Werkseinstellung
UPd-
USP
LI1
Anmerkung:
• Texte in eckigen Klammern [ ] entsprechen der Anzeige des Grafikterminals.
• Die Werkseinstellungen entsprechen der [Makro Konfig.] (CFG) = [Start/Stopp] (StS), d. h. der werkseitig eingestellten
Makrokonfiguration.
b [+/- DREHZAHL]
Aufrufbare Funktion für den Sollwertkanal [Kanal Sollw2] (Fr2) = [+/- Drehzahl] (UPdt)
(siehe
M [Zuord. + Drehzahl]
no
v [Nein] (nO): Funktion nicht aktiv
v [LI1] (LI1)
Seite 126)
[Nein] (nO)
34 1755856 12/2009

Wechselbeziehung der Parameterwerte
Die Konfiguration einiger Parameter ändert den Einstellbereich anderer Parameter, um das Fehlerrisiko herabzusetzen. Dies kann zur
Änderung der Werkseinstellung oder eines Wertes führen, den Sie bereits gewählt habe n.
Beispiel:
1. [Strombegrenzung] (CLI), Seite 61, auf den Wert 1,6 In gesetzt oder werkseitig auf 1,5 In eingestellt.
2. [Taktfrequenz] (SFr), Seite 61, auf 1 kHz eingestellt (und mit „ENT“ bestätigt), wodurch die [Strombegrenzung] (CLI) auf 1,36 In
begrenzt wird.
3. Wird die [Taktfrequenz] (SFr) auf 4 kHz erhöht, so wird die [Strombegrenzung] (CLI) nicht meh r begrenzt, bleibt jedoch auf dem Wert
1,36 In. Wird der Wert 1,6
In gewünscht, dann ist die [Strombegrenzung] (CLI) erneut einzustellen.
1755856 12/2009 35

Suche nach einem Parameter in diesem Dokument
F1
RDY Term +0,00 Hz 0 A
1.3 EINSTELLUNGEN
Auflösung Rampe: 01
Hochlaufzeit 9,51 s
Auslaufzeit: 9,67 s
Hochlaufzeit 2: 12,58 s
Auslaufzeit 2: 13,45 s
Code << >> Quick
Code
RDY Term +0,00 Hz 0 A
1.3 EINSTELLUNGEN
Auflösung Rampe: 01
ACC 9,51 s
Auslaufzeit: 9,67 s
Hochlaufzeit 2: 12,58 s
Auslaufzeit 2: 13,45 s
Code << >> Quick
Die Suche nach Parameterbeschreibungen wurde vereinfacht:
• Mit integriertem Terminal: Verwenden Sie direkt das Verzeichnis der Parametercodes auf Seite 278, um die Seite mit dem
Kommentar zum angezeigten Parameter zu suchen.
• Mit Grafikterminal: Wählen Sie den zu suchenden Parameter und drücken Sie die Tast e : [Code]. Solange die Taste gedrückt
bleibt, wird der Code des Parameters an Stelle des Namens angezeigt.
Beispiel: ACC
Verwenden Sie anschließend das Verzeichnis der Parametercodes auf Seite 278, um die Seite mit dem Kommentar zum
angezeigten Parameter zu suchen.
36 1755856 12/2009

[1.1 SCHNELLSTART] (SIM-)
RDY Term +0,00 Hz 0 A
HAUPTMENÜ
1 UMRICHTER MENÜ
2 ZUGRIFFSEBENE
3 LADEN/SPEICHERN ALS
4 ZUGRIFFSCODE
5 SPRACHE
Code Quick
ENT
RDY Term +0,00 Hz 0 A
1 UMRICHTER MENÜ
1.1 SCHNELLSTART MENÜ
1.2 ÜBERWACHUNG
1.3 EINSTELLUNGEN
1.4 ANTRIEBSDATEN
1.5 EIN/ AUSGÄNGE
Code << >> Quick
ENT
RUN Term +50,00 Hz 80 A
1.1 SCHNELLSTART MENÜ
2/3-Drahtst.
Makro Konfig.
Kundensp. Makro
Standard Motorfreq.
Verlust Netzphase
Code << >> Quick
XXX
SIM-
SUP-
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
Anzeige des Zustands des Umrichters
SCHNELLSTART MENÜ
Einschalten
Mit Grafikterminal:
Mit integriertem Terminal:
Über das Menü [1.1-SCHNELLSTART MENÜ] (SIM-) ist eine schnelle Inbetriebnahme mögli ch, die für die meisten Anwen dungen ausreicht .
Die Parameter dieses Menüs sind nur im Stillstand und ohne Fahrbefehl änderbar, mit folgenden Ausnahmen:
• Die Motormessung, durch die der Motor unter Spannung gesetzt wird.
• Die Einstellparameter, Seite 44.
Anmerkung: Die Parameter des Menüs [1.1 SCHNELLSTART MENÜ] (SIM-) sind in der Reihenfolge zu definieren, in der sie
erscheinen, da die ersten Parameter die Voraussetzung für alle weiteren Parameter bilden.
Zum Beispiel ist [2/3-Drahtst.] (tCC) vor jedem anderen Parameter zu konfigurieren.
Das Menü [1.1 SCHNELLSTART] (SIM-) ist allein oder vor den andere n Menüs zur Konfiguration des Umrichters zu konfigurieren. Wurde
in einem der anderen Menüs zuvor eine Änderung durchgeführt, insbesondere im Menü [1.4 ANTRIEBSDATEN] (drC-), dann kann es zu einer
Änderung bestimmter Parameter im Menü [1.1 SCHNELLSTART] (SIM-) kommen, beispielsweise der Motorparameter, wenn ein Synchronmotor
gewählt wurde. Die Rückkehr zum Menü [1.1 SCHNELLSTART] (SIM-) nach der Änderung eines anderen Konfigurationsmenüs des Umrichters
ist überflüssig, stellt aber kein Problem dar. Die Änderungen im Anschluss an eine Modifikation in einem anderen Konfigurationsmenü
werden daher nicht beschrieben, um die Lesbarkeit dieses Abschnitts nicht unnötig zu erschweren.
Makrokonfiguration
Die Makrokonfiguration ermöglicht eine schnelle Konfiguration von Funktionen für ein bestimmtes Anwendungsgebiet.
Sie können zwischen sieben Makrokonfigurationen wählen:
• Betrieb / Stopp (Werkskonfiguration)
• Fördertechnik
• Allgemeine Anwendungen
• Hubwerke
•PID-Regler
• Kommunikationsbus
• Master / Slave
Die Wahl einer Makrokonfiguration bewirkt die Zuordnung der Parameter dieser Makro konfiguration.
Jede Makrokonfiguration kann in den anderen Menüs geändert werden.
1755856 12/2009 37

[1.1 SCHNELLSTART] (SIM-)
Parameter der Makrokonfigurationen
Belegung der Ein-/Ausgänge
Eingang/
Ausgang
AI1 [Kanal
AI2 [Nein] [Sollw. Summ. E2] [Sollw. Summ. E2] [Nein] [Istwert PID] [Nein] [Ref. Drehm.]
AO1 [Nein] [Nein] [Nein] [Nein] [Nein] [Nein] [Nein]
R1 [kein Fehler] [kein Fehler] [kein Fehler] [kein Fehler] [kein Fehler] [kein Fehler] [kein Fehler]
R2 [Nein] [Nein] [Nein] [Bremsanst] [Nein] [Nein] [Nein]
LI1 (2-Draht) [Rechtslauf] [Rechtslauf] [Rechtslauf] [Rechtslauf] [Rechtslauf] [Rechtslauf] [Rechtslauf]
LI2 (2-Draht) [Linkslauf] [Linkslauf] [Linkslauf] [Linkslauf] [Linkslauf] [Linkslauf] [Linkslauf]
LI3 (2-Draht) [Nein] [2 Vorwahlfreq.] [Jog] [Fehlerreset] [PID Reset
LI4 (2-Draht) [Nein] [4 Vorwahlfreq.] [Fehlerreset] [Ext. Fehler] [Zuord 2 PID-
LI5 (2-Draht) [Nein] [8 Vorwahlfreq.] [Begr Drehm] [Nein] [Zuord 4 PID-
LI6 (2-Draht) [Nein] [Fehlerreset] [Nein] [Nein] [Nein] [Nein] [Nein]
LI1 (3-Draht) Startfreig. Startfreig. Startfreig. Startfreig. Startfreig. Startfreig. Startfreig.
LI2 (3-Draht) [Rechtslauf] [Rechtslauf] [Rechtslauf] [Rechtslauf] [Rechtslauf] [Rechtslauf] [Rechtslauf]
LI3 (3-Draht) [Linkslauf] [Linkslauf] [Linkslauf] [Linkslauf] [Linkslauf] [Linkslauf] [Linkslauf]
LI4 (3-Draht) [Nein] [2 Vorwahlfreq.] [Jog] [Fehlerreset] [PID Reset
LI5 (3-Draht) [Nein] [4 Vorwahlfreq.] [Fehlerreset] [Ext. Fehler] [Zuord 2 PID-
LI6 (3-Draht) [Nein] [8 Vorwahlfreq.] [Begr Drehm] [Nein] [Zuord 4 PID-
LI7 bis LI14 [Nein] [Nein] [Nein] [Nein] [Nein] [Nein] [Nein]
LO1 bis LO4 [Nein] [Nein] [Nein] [Nein] [Nein] [Nein] [Nein]
R3 / R4 [Nein] [Nein] [Nein] [Nein] [Nein] [Nein] [Nein]
AI3, AI4 [Nein] [Nein] [Nein] [Nein] [Nein] [Nein] [Nein]
RP [Nein] [Nein] [Nein] [Nein] [Nein] [Nein] [Nein]
AO2 [Motorstrom] [Motorstrom] [Motorstrom] [Motorstrom] [Motorstrom] [Motorstrom] [Motorstrom]
AO3 [Nein] [M Motor +/-] [Nein] [M Motor +/-] [PID Ausg.] [Nein] [Freq. Motor]
Taste F1 [Nein] [Nein] [Nein] [Nein] [Nein] Steuerung
Tasten
F2, F3, F4
[Start/
[Mater.Handl] [allgemein] [Hubwerk] [PID-Reg.]
Stopp]
Sollw1]
[Nein] [Nein] [Nein] [Nein] [Nein] [Nein] [Nein]
[Kanal Sollw1] [Kanal Sollw1] [Kanal Sollw1] [Kanal Sollw1]
(PID-Sollwert)
I Anteil]
Sollw]
Sollw]
I Anteil]
Sollw]
Sollw]
Optionskarten
Tasten des Grafikterminals
[Buskom.]
[Mast./
Slave]
[Kanal Sollw2]
([Kanal Sollw1]
= Integrierter
Modbus) (1)
[Umsch. Sollw
Kanal]
[Fehlerreset] [Fehlerreset]
[Nein] [Nein]
[Umsch. Sollw
Kanal]
[Fehlerreset] [Fehlerreset]
[Nein] [Nein]
über das
Grafikterminal
[Kanal Sollw1]
[Umsch
Moment / v]
[Umsch
Moment / v]
[Nein]
Bei der 3-Draht-Steuerung ist die Belegung der Eingänge LI1 bis LI6 versetzt.
(1) Für einen Start mit integriertem Modbus muss zunächst [Adresse Modbus] (Add), Seite 244, konfiguriert werden.
Hinweis: Diese Belegungen werden bei jeder Änderung der Makrokonfiguration neu initialisiert.
38 1755856 12/2009

[1.1 SCHNELLSTART MENÜ] (SIM-)
Parameter der Makrokonfigurationen
Andere Konfigurationen und Einstellungen
Zusätzlich zur E/A-Belegung sind weitere Parameter zugeordnet, jedoch nur in den Makrokonfigurationen Hubwerk und Master / Slave.
Hubwerk:
• [Bewegungsart] (bSt) = [Hubwerk] (UEr), Seite 161
• [Rückm. Bremse] (bCI) = [Nein] (nO), Seite 161
• [Startimpuls Bremse] (bIP) = [Nein] (nO), Seite 161
• [I Bremsanzug aufs.] (Ibr) = [Nennstrom Motor] (nCr), Seite 161
• [Zeit Bremsanzug] (brt) = 0,5 s, Seite 162
• [Freq. Bremsanzug] (bIr) = [Auto.] (AUtO), Seite 162
• [Freq. Bremsabfall] (bEn) = [Auto] (AUto), Seite 162
• [Zeit Bremsabfall] (bEt) = 0,5 s, Seite 162
• [Bremse Drehr. Umk.] (bEd) = [Nein] (nO), Seite 163
• [Sprg Freq. n-Invert.] (JdC) = [Auto] (AUtO), Seite 163
• [Zeit Wiederanlauf] (ttr) = 0 s, Seite 163
• [Zeit Rampe Strom] (brr) = 0 s, Seite 165
• [Kleine Frequenz] (LSP) = Vom Umrichter berechneter Motornennschlupf, Seite 44
• [Verlust Motorphase] (OPL) = [Ja] (YES), Seite 225. Dieser Parameter kann nicht mehr geändert werden.
• [Einf. im Lauf] (FLr) = [Nein] (nO), Seite 222. Dieser Parameter kann nicht mehr geändert werden.
Master / Slave:
• [Typ Motorsteuerung] (Ctt) = [SVC I] (CUC), Seite 71
Hinweis: Diese Zuordnungen werden bei jeder Änderung der Makrokonfiguration forciert, mit Ausnahme des Parameters [Typ Motorst euerung]
(Ctt) bei der Master/Slave-Makrokonfiguration, wenn dieser als [FVC] (FUC) konfiguriert wird.
Rückkehr zur Werkseinstellung:
Die Rückkehr zur Werkseinstellung über [Auswahl Konfig.] (FCSI) = [Makro Konf.] (InI), Seite 251, bewirkt die Rückkehr zur gewählten
Makrokonfiguration. Der Parameter [Makro Konfig.] (CFG) bleibt unverändert, [Kundensp. Makro] (CCFG) verschwindet jedoch.
Anmerkung:
• Die Werkseinstellungen entsprechen der [Makro Konfig.] (CFG) = [Start/Stopp] (StS), d. h. der werkseitig eingestellten
Makrokonfiguration.
1755856 12/2009 39

[1.1 SCHNELLSTART MENÜ] (SIM-)
UWV
L1 L3
ATV71H
KM10
R2A
R2C
L2
M
3
3
2
(1)
AI1
LI1 LI2+24
Elektromagnetische Bremse
Rechtslauf
(Heben)
Linkslauf
(Senken)
UWV
L1 L3
AI1
L2
M1
3
3
COMA01
LI1 LI2+24
COM AI2 UWV
LI1 +24
AI1
LI2
M2
3
LI3 L1 L3L2
3
ATV 71Hpppp
Slave-Umrichter
ATV 71H
pppp
Master-Umrichter
MomentDrehzahl
Linkslauf
Rechtslauf
Linkslauf
Rechts-
lauf
Beispiele für Schaltpläne für Makrokonfigurationen
Schaltplan [Hubwerk] (HSt)
(1)In den Steuerkreis der Bremse ist ein Kontakt des Moduls Preventa zu integrieren, damit die Bremse bei der Aktivierung der
Sicherheitsfunktion „Power Removal“ auf sichere Weise angezogen wird (siehe Verdrahtungsschema der Installationsanleitung).
Schaltplan [Mast./Slave] (MSL)
Wenn die beiden Motoren mechanisch verbunden si nd, bewi rkt der Anzu g des Kontakt s Drehzahl/Drehm oment den Master/Sl ave-Betrieb.
Der Master-Umrichter regelt die Drehzahl und steuert das Drehmoment des Slave-Umrichters, um die Verteilun g der Last zu gewährleisten.
40 1755856 12/2009

[1.1 SCHNELLSTART MENÜ] (SIM-)
+24 LI1 LIx
ATV 71
+24 LI1 LI2 LIx
ATV 71
ACHTUNG
UNERWARTETER BETRIEB DES GERÄTS
Zur Änderung der Belegung von [2/3-Drahtst.] (tCC) muss die Taste „ENT“ gedrückt werden (2 s).
Sie bewirkt die Rückkehr zur Werkseinstellung der Funktion: [Typ 2-Drahtst.] (tCt), Seite 89
, sowie
aller Funktionen, die sich auf Logikeingänge beziehen.
Gleichzeitig wird auch die Rückkehr zur gewählten Makrokonfiguration bewirkt, wenn diese
benutzerspezifisch angepasst wurde (Verlust der Anpassungen).
Stellen Sie sicher, dass diese Änderung mit dem verwendeten Verdrahtungsschema kompatibel ist.
Die Nichtbeachtung dieser Vorkehrung kann zum Tod oder schwerer Körperverletzung
führen.
ACHTUNG
UNERWARTETER BETRIEB DES GERÄTS
Zur Änderung der Belegung von [Makro Konfig.] (CFG) muss die Taste „ENT“ gedrückt werden (2 s).
Stellen Sie sicher, dass die gewählte Makrokonfiguration mit dem verwendeten Verdrahtungsschema
kompatibel ist.
Die Nichtbeachtung dieser Vorkehrung kann zum Tod oder schwerer Körperverletzung
führen.
Code Name/Beschreibung Einstellbereich Werkseinstellung
tCC
M [2/3-Drahtst.]
2C
3C
v [2Draht-Stg] (2C)
v [3Draht-Stg] (2C)
[2Draht-Stg] (2C)
2-Draht-Steuerung: Das Ein- oder Ausschalten wird über den Zu stand (0 oder 1) oder die Flanke (0 bis 1 oder
1 bis 0) des Eingangs gesteuert.
Beispiel für eine Verdrahtung als „Source“:
LI1: Rechtslauf
LIx: Linkslauf
3-Draht-Steuerung (flankengesteuert): Ein Impuls „Rechtslauf“ oder „Linkslauf“ reicht aus, um das Anlaufen
des Motors zu steuern; ein Impuls „Stopp“ reicht aus, um das Anhalten des Motors zu steuern.
Beispiel für eine Verdrahtung als „Source“:
LI1: Stopp
LI2: Rechtslauf
LIx: Linkslauf
1755856 12/2009 41
CFG
StS
HdG
HSt
GEn
ntt
MSL
CCFG
YES
Pi
M [Makro Konfig.]
v [Start/Stopp] (StS): Betrieb / Stillstand
v [Mater.Handl] (HdG): Fördertechnik
v [Hubwerk] (HSt): Hubwerke
v [allgemein] (GEn): Allgemeine Anwendungen
v [PID-Reg.](PId): PID-Regelung
v [Buskom.] (nEt): Kommunikationsbus
v [Mast./Slave] (MSL): Master / Slave
M [Kundensp. Makro]
Parameter, der nur gelesen werden kann und sichtbar ist, wenn mindestens ein Parameter der
Makrokonfiguration geändert wurde.
v [Ja] (YES)
[Start/Stopp] (StS)

[1.1 SCHNELLSTART MENÜ] (SIM-)
100 - Schlupf in %
100
50 - Schlupf in Hz
50
60 - Schlupf in Hz
60
Code Name/Beschreibung Einstellbereich Werkseinstellung
bFr
IPL
YES
nPr
UnS
nCr
FrS
nSP
M [Standard Motorfreq.]
50
60
v [50 Hz IEC] (50): IEC
v [60 Hz NEMA] (60): NEMA
Dieser Parameter ändert die Voreinstellung folgender Parameter:[Nennspannung Mot.] (UnS), siehe weiter
unten, [Große Frequenz] (HSP), Seite
Ausgangsfreq.] (tFr), siehe unten.
M [Verlust Netzphase]
nO
v [Störung ign] (nO): Störung ignorieren; zu verwenden, wenn der Umrichter einphasig oder vom DC-Bus
gespeist wird.
v [Fr. Auslauf] (YES): Störung, mit Anhalten im freien Auslauf.
Beim Verlust einer Phase wechselt der Umrichter in den Fehlermodus [Netzphasenfehler] (IPL). Bei einem
Verlust von 2 oder 3 Phasen wird der Betrieb des Umrichters jedoch bis zur Auslösung eines
Unterspannungsfehlers fortgesetzt.
Dieser Parameter kann in diesem Menü nur bei Umrichtern des Typs ATV71H037M3 bis HU75M3
(Einphasenbetrieb) aufgerufen werden.
M [Motornennleistung]
Motornennleistung gemäß Typenschild; in kW, wenn [Standard Motorfreq.] (bFr) = [50 Hz IEC] (50); in HP,
wenn [Standard Motorfreq.] (bFr) = [60 Hz NEMA] (60).
M [Nennspannung Mot.]
Nennspannung des Motors gemäß Typenschild.
ATV71pppM3: 100 bis 240 V - ATV71pppN4: 200 bis 480 V - ATV71pppY: 400 bis 690 V
M [Nennstrom Motor]
Nennstrom des Motors gemäß Typenschild.
M [Nennfreq. Motor]
Nennfrequenz des Motors gemäß Typenschild.
Die Werkseinstellung beträgt 50 Hz und wird durch eine Voreinstellung von 60 Hz ersetzt,
wenn [Motorfrequenz] (bFr) auf 60 Hz gesetzt wird.
M [Motornenndrehzahl]
Nenndrehzahl des Motors gemäß Typenschild.
0 bis 9999 U/min, danach 10,00 bis 60,00 kU/min auf der integrierten Anzeige.
Gibt das Typenschild nicht die Nenndrehzahl, sondern die Synchrondrehzahl und den Schlupf in Hertz oder
Prozent an, dann errechnet sich die Nenndrehzahl wie folgt:
[50 Hz IEC] (50)
44, [F.-Schwellw. Mot] (Ftd), Seite 67, [Nennfreq. Motor] (FrS) und [Max.
Gemäß
Umrichterleistung
Gemäß
Umrichterleistung
Gemäß
Umrichterleistung
0,25 bis 1,5 In (1) Gemäß
10 bis 500 Hz 50 Hz
0 bis 60000 U/min Gemäß
Gemäß
Umrichterleistung
Gemäß
Umrichterleistung und
[Standard Motorfreq.]
(bFr)
Umrichterleistung und
[Standard Motorfreq.]
(bFr)
Umrichterleistung
• Nenndrehzahl = Synchrondrehzahl x
oder
• Nenndrehzahl = Synchrondrehzahl x (50 Hz-Motoren)
oder
• Nenndrehzahl = Synchrondrehzahl x (60 Hz-Motoren)
tFr
(1)In entspricht dem in der Installationsanleitung und auf dem Typenschild des Umrichters angegebenen Nennstrom des Umrichters.
42 1755856 12/2009
M [Max. Ausgangsfreq.]
Die Werkseinstellung beträgt 60 Hz und wird durch eine Voreinstellung von 72 Hz ersetzt, wenn der Parameter
[Motorfrequenz] (bFr) auf 60 Hz eingestellt wird.
Der maximale Wert wird durch folgende Bedingungen eingeschränkt:
• Er sollte den Wert der [Nennfreq. Motor] (FrS) um das 10fache nicht überschreiten.
• Er kann nur bei den Umrichtern des Typs ATV71pppY oder größeren Umrichtermodellen als ATV71HD37
500 Hz überschreiten (die Werte von 500 Hz bis 1600 Hz sind nur für Leistungen bis maximal 37 kW möglich).
10 bis 1600 Hz 60 Hz

[1.1 SCHNELLSTART] (SIM-)
Code Name/Beschreibung Werkseinstellung
tUn
dOnE
tUS
PEnd
PrOG
FAIL
dOnE
PHr
nO
YES
tAb
AbC
ACb
M [Motormessung]
[Nein] (nO)
v [Nein] (nO): Motormessung nicht erfolgt.
v [Ja] (YES): Die Motormessung erfolgt sobald wie möglich. Der Parameter wechselt dann automatisch auf
[Ausgeführt] (dOnE).
v [Ausgeführt] (dOnE): Verwendung der Werte, die sich durch die vorherige Motormessung ergeben.
Achtung:
• Alle Motorparameter ([Nennspannung Mot.] (UnS), [Nennf req. Motor] (FrS), [Nennstrom Motor] (nCr),
[Motornenndrehzahl] (nSP), [Motornennleistung] (nPr)) müssen unbedingt vor der Motormessung
ordnungsgemäß konfiguriert werden.
Wenn einer dieser Parameter nach der Motormessung geändert wird, wechselt die [Motormess.] (tUn) auf
[Nein] (nO) und muss erneut durchgeführt werden.
• Die Motormessung wird nur dann durchgeführt, wenn kein Haltebefehl erteilt wurde. Wenn die Funktion
„Freier Auslauf“ oder „Schnellhalt“ einem Logikeingang zugeordnet wurde, muss dieser Eingang auf 1
gesetzt werden (Eingang auf 0 aktiv).
• Die Motormessung hat Vorrang vor eventuellen Fahr- oder Vormagnetisierungsbef ehlen, die nach der
Motormessungssequenz berücksichtigt werden.
• Wenn die Motormessung misslingt, zeigt der Umrichter [Nein] (nO) an und kann je nach Konfiguration von
[Mgt Fehler Mot. Mes] (tnL), Seite
• Die Motormessung kann 1 bis 2 Sekunden dauern. Unterbrechen Sie den Vorgang nicht und warten Sie ab,
bis die Anzeige zu „[Ausgeführt] (dOnE)“ oder auf „[Nein] (nO)“ wechselt.
Hinweis: Während der Motormessung fließt Nennstrom durch den Motor.
M [Zust. Mot.-messung]
(Nur zur Information, nicht einstellbar)
239, in den Fehlermodus [Motormess.] (tnF) wechseln.
[Nicht ausg.] (tAb)
v [Nicht ausg.] (tAb): Der Standardwert des Statorwiderstands wird verwendet, um den Motor zu steuern.
v [Warten] (PEnd): Die Motormessung wurde angefordert, aber noch nicht ausgefüh rt.
v [Aktiv] (PrOG): Die Motormessung wird ausgeführt.
v [Fehlerhaft] (FAIL): Die Motormessung ist fehlgeschlagen.
v [Ausgeführt] (dOnE): Der von der Motormessfunktion gemessene Statorwiderstand wird verwend et,
um
den Motor zu steuern.
M [Phasendrehung]
[ABC] (AbC)
v [ABC] (AbC): Normale Drehrichtung.
v [ACB] (ACb): Umgekehrte Drehrichtung.
Mit diesem Parameter kann die Drehrichtung des Motors ohne Inverti erung der Verkabelung geändert werden.
1755856 12/2009 43

[1.1 SCHNELLSTART MENÜ] (SIM-)
Bei Betrieb und bei Stillstand änderbare Parameter
Code Name/Beschreibung Werkseinstellung
ItH
ACC
dEC
LSP
HSP
(1)In entspricht dem in der Installationsanleitung und auf dem Typenschild des Umrichters angegebenen Nennstrom des Umrichters.
M [Therm. Nennstrom]
Strom für den thermischen Schutz des Motors, der entsprechend dem auf dem Typenschild ang egebenen
Bemessungsbetriebsstrom einzustellen ist.
M [Hochlaufzeit]
Zeit für den Hochlauf von 0 bis zur [Nennfreq. Motor] (FrS) (Seite 42). Stellen Sie s icher, dass d ieser Wert mit
dem Trägheitsmoment des Antriebs kompatibel ist.
M [Auslaufzeit]
Zeit für den Auslauf von der [Nennfreq. Motor] (FrS) (Seite 42) bis auf 0. Stellen Sie sicher, dass dieser Wert
mit dem Trägheitsmoment des Antriebs kompatibel ist.
M [Kleine Frequenz]
Motorfrequenz mit minimalem Sollwert, Einstellung von 0 bis [Große Fre quenz] (HSP).
M [Große Frequenz]
Motorfrequenz mit maximalem Sollwert, Einstellung von [Kleine Frequenz] (LSP) bis [Max. Ausgangsfreq.]
(tFr). Die Werkseinstellung wechselt auf 60 Hz, wenn [Standard Motorfreq.] (bFr) = [60 Hz NEMA] (60).
0,2 bis 1,5 In (1) Gemäß
Umrichterleistung
0,1 bis 999,9 s 3,0 s
0,1 bis 999,9 s 3,0 s
0
50 Hz
44 1755856 12/2009

[1.2 ÜBERWACHUNG] (SUP-)
RDY Term +0,00 Hz 0 A
HAUPTMENÜ
1 UMRICHTER MENÜ
2 ZUGRIFFSEBENE
3 LADEN / SPEICHERN ALS
4 ZUGRIFFSCODE
5 SPRACHE
Code Quick
ENT
RDY Term +0,00 Hz 0 A
1 UMRICHTER MENÜ
1.1 SCHNELLSTART MENÜ
1.2 ÜBERWACHUNG
1.3 EINSTELLUNGEN
1.4 ANTRIEBSDATEN
1.5 EIN/ AUSGÄNGE
Code << >> Quick
ENT
RUN Term +50,00 Hz 80 A
1.2 ÜBERWACHUNG
ABBILD E/A
ABBILD E/A CI
ABBILD KOMM.
Alarmgruppe :
Freq. Sollwert HMI :
Code << >> Quick
XXX
SIM-
SEt-
SUP-
ESC
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
Anzeige des Zustands des Umrichters
ÜBERWACHUNG
Einschalten
Mit Grafikterminal:
Mit integriertem Terminal:
1755856 12/2009 45

[1.2 ÜBERWACHUNG] (SUP-)
Eingänge/Ausgänge
Ein-/Ausgänge der Karte „Controller Inside“ (sofern vorhanden)
Kommunikationsdaten und -werte
Interne Werte und Zustände des Umrichters (siehe Seite 51
)
ENT
ENT
ENT
ENT
1
0
1
0
Mit Grafikterminal
Über dieses Menü können Sie die Ein-/Ausgänge, die Zustände und internen Werte des Umrichters sowie die Kommunikationsdaten
und -werte anzeigen.
RUN Term +50,00 Hz 80 A
1.2 ÜBERWACHUNG
ABBILD E/A
ABBILD E/A CI
ABBILD KOMM.
Alarmgruppe:
Freq. Sollwert HMI:
Code << >> Quick
Eingänge/Ausgänge
Zustand 0
Zustand 1
Zustand 0
Zustand 1
RUN Term +50,00 Hz 80 A
ABBILD E/A
ABBILD LOGIK EINGÄNGE
STATUS ANALOG-EING.
ABBILD LOGIK AUSG. LO
STATUS ANALOG-AUSG.
STATUS ENCODER/DIG SOLLW
Code Quick
RUN Term +50,00 Hz 80 A
ABBILD LOGIK EINGÄNGE Zuordnung LI1
PR LI1 LI2 LI3 LI4 LI5 LI6 LI7 Rechtslauf
LI8 LI9 LI10 LI11 LI12 LI13 LI14 Einsch. Verz. R1 : 0 ms
<< >> Quick << >> Quick
RUN Term +50,00 Hz 80 A RUN Term +50,00 Hz 80 A
STATUS ANALOG-EING. Zuordnung AI1
AI1: 9,87 V Kanal Sollw1
AI2: 2,35 mA Kanal Forced Lokal
Code << >> Quick Quick
RUN Term +50,00 Hz 80 A RUN Term +50,00 Hz 80 A
ABBILD LOGIK AUSG. LO Zuordnung LO1
R1 R2 LO Nein
LOA: 0000000000000010b Aussch. Verz. LO1 : 0 ms
Fortbewegung von einem Bildschirm
zum anderen (von ABBILD LOGIK
EINGÄNGE zu STATUS
ENCODER/DIG SOLLW)
durch Drehen der Navigationstaste
Zugriff auf die Konfiguration des
gewählten Ein- oder Ausgangs:
Drücken der Taste „ENT“
RUN Term +50,00 Hz 80 A
Mot. Magn.
Ref. Drehm.
Min. Wert AI1: 0.0 V
Max. Wert AI1: 10.0 V
Einsch. Verz. LO1 : 0 ms
LO1 aktiv bei : 1
<< >> Quick << >> Quick
RUN Term +50,00 Hz 80 A RUN Term +50,00 Hz 80 A
STATUS ANALOG-AUSG. Zuordnung AO1
AO1: 9.87 V Freq. Motor
Code << >> Quick Quick
RUN Term +50,00 Hz 80 A RUN Term +50,00 Hz 80 A
STATUS ENCODER/DIG SOLLW Zuord PulsRef
Kundsp. Filt RP Ref: 25,45 kHz Frequenzsollwert
Encoder: 225 kHz min. Wert RP : 2 kHz
Code << >> Quick Quick
Min. Wert AO1 : 4 mA
Max. Wert AO1 : 20 mA
Filter Ausgang
AO1
max. Wert RP : 50 kHz
Filter RP : 0 ms
: 10 ms
46 1755856 12/2009

[1.2 ÜBERWACHUNG] (SUP-)
ENT
ENT
1
0
1
0
1
0
Mit Grafikterminal
Ein-/Ausgänge der Karte „Controller Inside“
Zustand 0
Zustand 1
Zustand 0
Zustand 1
RUN Term +50,00 Hz 80 A
ABBILD E/A CI
ABBILD LI APPL. KARTE
ABBILD AI APPLI. KARTE
ABBILD LO APPLI. KARTE
ABBILD AO APPLI. KARTE
Code Quick
RUN Term +50,00 Hz 80 A
ABBILD LI APPL. KARTE
LI51 LI52 LI53 LI54 LI55 LI56 LI57 LI58
LI59 LI60
<< >> Quick
RUN Term +50,00 Hz 80 A RUN Term +50,00 Hz 80 A
ABBILD AI APPLI. KARTE AI51
AI51 : 0.000 mA
AI52 : 9,87 V
Fortbewegung von einem
Bildschirm zum anderen
(von
ABBILD LI APPL. KARTE
zu ABBILD AO APPLI. KARTE)
durch Drehen der Navigationstaste
0.000 mA
Code << >> Quick << >> Quick
RUN Term +50,00 Hz 80 A
ABBILD LO APPLI. KARTE
LO51 LO52 LO53 LO54 LO55 LO56
Min = 0,001 Max = 20.000
<< >> Quick
RUN Term +50,00 Hz 80 A RUN Term +50,00 Hz 80 A
ABBILD AO APPLI. KARTE AO51
AO51 : 0.000 mA
AO52 : 9,87 V
0.000 mA
Code << >> Quick << >> Quick
Min = 0,001 Max = 20.000
1755856 12/2009 47

[1.2 ÜBERWACHUNG] (SUP-)
RUN Term +50,00 Hz 80 A
ABBILD KOMM.
CMD Kanal: Modbus
CMD Register: ABCD Hex.
Kanal Sollw aktiv: CANopen
Frequenzsollwert : - 12,5 Hz
Zust. Reg FU: 2153 Hex.
Code Quick
W3141 F230 Hex
W2050: F230 Hex
W4325: F230 Hex
W0894: F230 Hex
SCANNER KOMM EING.
SCAN KOMM. AUSG.
ABBILD STEUERREG CMD
ABBILD SOLLW. UMRICH.
DIAG MODBUS NETZW
DIAG MODBUS HMI
ABBILD CANopen
SCANNER PLC KARTE
RUN Term +50,00 Hz 80 A
SCANNER KOMM EING.
Wert Kom Scan In1: 0
Wert Kom Scan In2: 0
Wert Kom Scan In3: 0
Wert Kom Scan In4: 0
Wert Kom Scan In5: 0
Code Quick
Wert Kom Scan In6: 0
Wert Kom Scan In7: 0
Wert Kom Scan In8: 0
RUN Term +50,00 Hz 80 A
SCAN KOMM. AUSG.
Kom Scan Out1 val: 0
Kom Scan Out2 val: 0
Kom Scan Out3 val: 0
Kom Scan Out4 val: 0
Kom Scan Out5 val: 0
Code Quick
Kom Scan Out6 val: 0
Kom Scan Out7 val: 0
Kom Scan Out8 val: 0
RUN Term +50,00 Hz 80 A
ABBILD STEUERREG CMD
CMD Modb: 0000 Hex.
CMD CANopen: 0000 Hex.
CMD Karte Komm: 0000 Hex.
CMD PLC Karte: 0000 Hex.
Code Quick
RUN Term +50,00 Hz 80 A
ABBILD SOLLW. UMRICH.
Freq. Sollw. Modbus: 0.0 Hz
Freq. Sollw. CAN: 0.0 Hz
Freq. Sollw. Komm.: 0.0 Hz
Sollwert PLC Karte: 0.0 Hz
Code Quick
Mit Grafikterminal
Kommunikation
[ABBILD KOMM.] gibt den für die Steuerung oder den Sollwert verwendeten Bustyp an,
die entsprechenden Steuerwerte und Sollwerte, das Statuswo rt, die im Menü [ANZEIGE
KONFIG.] gewählten Wörter usw.
Die Hexadezimal- oder Dezimalanzeige kann im Menü [ANZEIGE KONFIG.]
konfiguriert werden.
[SCANNER KOMM EING.] und [SCAN KOMM. AUSG.]:
Anzeige periodisch ausgetauschter Register (8 Eingänge und 8 Ausgänge) für in tegrierten Modbus und für Feldbuskarten.
48 1755856 12/2009

[1.2 ÜBERWACHUNG] (SUP-)
RUN Term +50,00 Hz 80 A
ABBILD KOMM.
CMD Kanal: Modbus
CMD Register: ABCD Hex.
Kanal Sollw aktiv: CANopen
Frequenzsollwert: - 12,5 Hz
Stat. Statusw. ETA: 2153 Hex.
Code Quick
W3141 : F230 Hex.
W2050 : F230 Hex.
W4325 : F230 Hex.
W0894 : F230 Hex.
SCANNER KOMM EING.
SCAN KOMM. AUSG.
ABBILD STEUERREG CMD
ABBILD SOLLW. UMRICH.
DIAG MODBUS NETZW
DIAG MODBUS HMI
ABBILD CANopen
SCANNER PLC KARTE
Kommunikation über Modbus
RUN Term +50,00 Hz 80 A
DIAG MODBUS NETZW
LED COM :
Anz Frame Mb Netz
CRC Fehler Mb Netz
Code Quick
Kommunikation über das Grafikterminal
RUN Term +50,00 Hz 80 A
DIAG MODBUS HMI
LED COM :
Anz Frame Mb HMI
CRC Fehler Mb HMI
Code Quick
Konfiguration der PDO über
das Netzwerk-Tool.
Einige PDO können nicht
verwendet werden.
RUN Term +50,00 Hz 80 A
ABBILD PDO1
Received PDO1-1 : FDBA Hex.
Received PDO1-2
Received PDO1-3
Received PDO1-4
Transmit PDO1-1 : FDBA Hex.
Code Quick
Transmit PDO1-2
Transmit PDO1-3
Transmit PDO1-4
RUN Term +50,00 Hz 80 A
ABBILD PDO2
Received PDO2-1 : FDBA Hex.
Received PDO2-2
Received PDO2-3
Received PDO2-4
Transmit PDO2-1 : FDBA Hex.
Code Quick
Transmit PDO2-2
Transmit PDO2-3
Transmit PDO2-4
RUN Term +50,00 Hz 80 A
ABBILD PDO3
Received PDO3-1 : FDBA Hex.
Received PDO3-2
Received PDO3-3
Received PDO3-4
Transmit PDO3-1 : FDBA Hex.
Code Quick
Transmit PDO3-2
Transmit PDO3-3
Transmit PDO3-4
Kommunikation über CANopen
Die PDO-Abbilder sind nur
sichtbar, wenn CANopen bestätigt
wurde (Adresse unterscheidet
sich von OFF) und die PDOaktiviert sind.
RUN Term +50,00 Hz 80 A
ABBILD CANopen
LED RUN:
LED ERR:
ABBILD PDO1
ABBILD PDO 2
ABBILD PDO 3
Code Quick
Slave NMT Status
Anzahl Tx PDO 0
Anzahl Rx PDO 0
Fehler Code 0
Rx Fehler Zähler 0
Tx Fehler Zähler 0
Mit Grafikterminal
Kommunikation (Fortsetzung)
Für jeden Bus können die Zustände der LEDs, die periodischen Daten, die Adresse,
die Geschwindigkeit, das Format usw. abgerufen werden.
LED aus
LED ein
1755856 12/2009 49

[1.2 ÜBERWACHUNG] (SUP-)
RUN Term +50,00 Hz 80 A
ABBILD KOMM.
CMD Kanal: Modbus
CMD Register: ABCD Hex.
Kanal Sollw aktiv: CANopen
Frequenzsollwert: - 12,5 Hz
Stat. Statusw. ETA: 2153 Hex.
Code Quick
W3141 : F230 Hex.
W2050 : F230 Hex.
W4325 : F230 Hex.
W0894 : F230 Hex.
SCANNER KOMM EING.
SCAN KOMM. AUSG.
ABBILD STEUERREG CMD
ABBILD SOLLW. UMRICH.
DIAG MODBUS NETZW
DIAG MODBUS HMI
ABBILD CANopen
SCANNER PLC Karte
Karte CONTROLLER INSIDE
RUN Term +50,00 Hz 80 A
SCANNER PLC Karte
SCANNER EINGANG
SCANNER AUSGANG
Code Quick
RUN Term +50,00 Hz 80 A
SCANNER EINGANG
Prg. Karte Scan In 1: 0
Prg. Karte Scan In 2: 0
Prg. Karte Scan In 3: 0
Prg. Karte Scan In 4: 0
Prg. Karte Scan In 5: 0
Code Quick
Prg. Karte Scan In 6: 0
Prg. Karte Scan In 7: 0
Prg. Karte Scan In 8: 0
RUN Term +50,00 Hz 80 A
SCANNER AUSGANG
CI Kart. scan Out 1: 0
CI Kart. scan Out 2: 0
CI Kart. scan Out 3: 0
CI Kart. scan Out 4: 0
CI Kart. scan Out 5: 0
Code Quick
CI Kart. scan Out 6: 0
CI Kart. scan Out 7: 0
CI Kart. scan Out 8: 0
Mit Grafikterminal
Kommunikation (Fortsetzung)
[SCANNER EINGANG] und [SCANNER AUSGANG]:
Anzeige periodisch ausgetauschter Register (8 Eingänge und 8 Ausgänge).
50 1755856 12/2009

[1.2 ÜBERWACHUNG] (SUP-)
Mit Grafikterminal: Interne Werte und Zustände des Umrichters
Name/Beschreibung
[Alarmgruppe] (ALGr)
[Freq. Sollwert HMI] (LFr)
[Int. Sollw. PID] (rPI)
[Sollw. Drehm. HMI] (L t r )
[Koeff. Multiplik] (MFr)
[Frequenzsollwert] (FrH)
[Ref. Drehm.] (trr )
[Motorfrequenz] (rFr)
[Mess. MotFreq. Vorz]
(MMF)
[Freq. Pulse Input] (FqS)
[Motorstrom] (LCr)
[Mitt. Geschw. ENA] (AUS)
[Motordrehzahl] (SPd)
[Spg Motor] (UOP)
[Motorleistung] (OPr)
[Motormoment] (Otr)
[Netzspannung] (ULn)
[Therm. Zust. Motor] (tHr)
[Therm. Zust. FU] (tHd)
[Th. Zust. Bremsw.] (tHb)
[Verbrauch] (APH)
[Betriebsstd. Motor] (rtH)
[Betriebszeit Umr.] (PtH)
[Zeit Temp AI IGBT] (tA C)
[Sollwert PID] (rPC)
[Istwert PID] (rPF)
[Fehler PID] (rPE)
[PID Ausg.] (rPO)
[Datum / Stunde] (CLO)
[- - - - -] (o02)
-
[- - - - -] (o06)
[akt. Konfiguration] (CnFS)
[akt. Parametersatz] (CFPS)
[ALARME] (ALr-)
[ANDERE STATUS] (SSt-)
Nummern der Gruppe der vorhandenen Alarme.
In Hz. Sollfrequenz über das Grafikterminal (aufrufbar, wenn die Funktion konfiguriert wurde).
Prozesswert. PID-Sollwert über das Grafikterminal (auf rufbar, wenn die Funktion konfiguriert wurde).
In % des Nennmoments. Sollwert des Drehmoments über das Grafikterminal.
In % (aufrufbar, wenn [Ref multi] (MA2,MA3), Seite 136, zugeordnet ist).
In Hertz
In % des Nennmoments (aufrufbar, wenn die Funktion konfiguriert is t).
In Hertz
In Hertz: Istwert der Motordrehzahl mit Vorzeichen, wenn eine Encoder-Karte vorhanden ist, andernfalls
Anzeige 0.
In Hertz: Von der Funktion [FREQUENZMESSER] (FqF-), Seite 236, verwendete Frequenz des Eingangs
„Pulse Input“.
In Ampere
In Hertz: Parameter aufrufbar, wenn [ENA System] (EnA) = [Ja] (YES) (siehe Seite 81).
In Umdrehungen/min
In Volt
In % der Nennleistung.
In % des Nennmoments.
In Volt. Über den DC-Bus ermittelte Netzspannung, bei Betrieb des Motors oder im Stillstand.
In Prozent
In Prozent
In % (nur bei Umrichtern mit hoher Leistung).
In Wh, kWh oder MWh (kumulierte elektr. Leistungsaufnahme des Umrichters).
In Sekunden, Minuten oder Stunden (Einschaltdauer des Motors).
In Sekunden, Minuten oder Stunden (Einschaltdauer des Umrichters).
In Sekunden (Dauer der Alarmauslösung „Temperatur IGBT“).
Prozesswert (aufrufbar, wenn PID konfiguriert ist).
Prozesswert (aufrufbar, wenn PID konfiguriert ist).
Prozesswert (aufrufbar, wenn PID konfiguriert ist).
In Hz (aufrufbar, wenn PID konfiguriert ist).
Durch die Karte „Controller Inside“ erzeugtes Datum mit der aktuellen Uhrzeit (aufrufbar, wenn Karte
vorhanden).
Durch die Karte CONTROLLER INSIDE erzeugte Wörter (aufrufbar, wenn Karte vorhanden).
Konfiguration aktiv [Konfig 0, 1 oder 2]
[Parameter 1, 2 oder 3] (aufrufbar, wenn die Parameterumschaltung gültig ist - siehe Seite 199).
Liste der vorhandenen Alarme. Bei einem vorhandenen Alarm wird ein angezeigt.
Liste der Sekundärstatus:
- [Magn Motor aktiv] (FLX): Magn Motor aktiv
- [Alarm PTC1] (PtC1): Alarm PTC-Fühler 1
- [Alarm PTC2] (PtC2): Alarm PTC-F ühl er 2
- [Alarm LI6=PTC] (PtC3): Alarm PTC-Fühler
LI6=PTC
- [Schnellhalt] (FSt): Schnellhalt
- [Schw. I err.] (CtA ) : St romschwellwert erreicht
([Strom Schwellwert] (Ctd), Seite
- [Schw. Freq. err.] (FtA): Frequenzschwellwert
erreicht ([F.-Schwellw. Mot] (Ftd), Seite
- [Schw. Freq 2 err.] (F2A): 2. Frequenzschwellwert
erreicht ([Schwellwert Freq. 2] (F2d), Seite
- [FRH err.] (SrA): Frequenzsollwert erreicht
- [Th Status Motor err] (tSA): Thermischer Zustand
Motor 1 erreicht
- [Al. ext Fehler] (EtF): Alarm einer externen Störung
- [autom Restart] (AUtO): Automatischer Neustart
- [Remote] (FtL): Steuerung im Online-Modus
- [Motormessung] (tUn): Motormessung
- [Unterspannung] (USA): Alarm einer Unterspannung
- [Konfig.1] (CnF1): Konfiguration 1 aktiv
- [Konfig. 2] (CnF2): Konfiguration 2 aktiv
66)
67)
67)
- [HSP err.] (FLA): Große Frequenz erreicht
- [Last ausger] (AnA): Alarm eines
Schleppfehlers
- [Satz 1 aktiv] (CFP1): Parametersatz 1
aktiv
- [Satz 2 aktiv] (CFP2): Parametersatz 2
aktiv
- [Satz 3 aktiv] (CFP3): Parametersatz 3
aktiv
- [Brems aktiv] (brS): Umrichterbremsung
- [Ladung DC Bus] (dbL): Ladung des
DC-Busses
- [Rechtslauf] (MFrd): Moto r d reh t in
Vorwärtsrichtung (rechts)
- [Linkslauf] (MrrS): Motor dreht in
Rückwärtsrichtung (links)
- [Alarm hohes Drehm.] (ttHA):
Motordrehmoment über dem oberen
Schwellwert [Schw. Drehm. hoch] (ttH),
66.
Seite
- [Alarm Drehm. Low] (ttLA):
Motordrehmoment unter dem unteren
Schwellwert [Schw. Drehm. Low] (ttL),
66.
Seite
- [Fehler Freq.-messer] (FqLA):
Gemessener Frequenzschwellwert
erreicht: [Schw. Alarm Puls] (FqL),
Seite 67.
1755856 12/2009 51

[1.2 ÜBERWACHUNG] (SUP-)
Zustand 1
Zustand
0
LI1 LI2 LI3 LI4 LI5 LI6 LI7 LI8
Zustand 1
Zustand 0
LI9 LI10 LI11 LI12 LI13 LI14 PR
Mit integriertem Terminal
Mit Hilfe dieses Menüs können Sie die Eingänge und die internen We rte und Zustände des Umrichters anzeigen.
Code Name/Beschreibung Einstellbereich Werkseinstellung
IOM-
LIA-
L1A
bis
L14A
LIS1
LIS2
ABBILD DER EINGÄNGE
b Funktionen der Logikeingänge
Zeigt die jedem Eingang zugeordneten Funktione n an. Ist keine Funktion zugeordnet, dann wird di e Angabe
„nO“ angezeigt.
Mit den Pfeilen und können alle Funktionen durchsucht werden. Wenn einem Eingang mehrere
Funktionen zugeordnet sind, stellen Sie sicher, dass diese miteinander kompatibel sind.
b Zustand der Logikeingänge LI1 bis LI8
Zeigt den Zustand der Logikeingänge LI1 bis LI8 an
(Verwendung der Segmentanzeige: Oben = 1, unten = 0).
In obigem Beispiel: LI1 und LI6 sind auf 1, LI2 bis LI5, LI7 und LI8 sind auf 0.
b Zustand der Logikeingänge LI9 bis LI14 und Power Removal
Zeigt den Zustand der Logikeingänge LI9 bis LI14 und PR (Power Removal) an
(Verwendung der Segmentanzeige: Oben = 1, unten = 0).
AIA-
AI1A
AI2A
AI3A
AI4A
In obigem Beispiel: LI9 und LI14 sind auf 1, LI10 bis LI13 sind auf 0 und PR (Power Removal) ist auf 1.
b Funktionen der Analogeingänge
Zeigt die jedem Eingang zugeordneten Funktione n an. Ist keine Funktion zugeordnet, dann wird di e Angabe
„nO“ angezeigt. Mit den Pfeilen
Eingang mehrere Funktionen zugeordnet sind, stellen Sie si cher, dass diese miteinander kompatibel sind.
und können alle Funktionen durchsucht werden. Wenn einem
52 1755856 12/2009

[1.2 ÜBERWACHUNG] (SUP-)
Mit integriertem Terminal: Interne Werte und Zustände des Umrichters
Code Name/Beschreibung Einheit
ALGr
rPI
MFr
FrH
trr
rFr
MMF
FqS
LCr
AUS
SPd
UOP
OPr
Otr
ULn
tHr
tHd
tHb
APH
rtH
PtH
tAC
rPC-
rPF
rPE
rPO
CLO-
o02
o03
o04
o05
o06
CnFS
CFPS
Alarmgruppe: Nummern der Gruppe der vorhandenen Alarme.
Interner PID-Sollwert: PID-Sollwert über das Grafikterminal (aufrufbar, wenn die Funktion konfiguriert wurde). Prozesswert
Multiplikationsfaktor (aufrufbar, wenn [Ref multi] (MA2,MA3), Seite 136, zugeordnet ist). %
Frequenzsollwert Hz
Sollwert Moment: Aufrufbar, wenn die Funktion konfiguriert ist. %.
Motorfrequenz Hz
Istwert der Motordrehzahl mit Vorzeichen, wenn eine Encoder-Karte vorhanden ist, andernfalls Anzeige 0.
Von der Funktion [FREQUENZMESSER] (FqF-), Seite 236, verwendete Frequenz des Eingangs „Pulse Inp ut“. Hz
Motorstrom C
Mittlere Drehzahl ENA : Parameter aufrufbar, wenn EnA = YES (siehe Seite 81). Hz
Motordrehzahl U/min
Motorspannung V
Motorleistung %
Drehmoment des Motors %
Netzspannung: Über den DC-Bus ermittelte Netzspannung, bei Betrieb des Motors oder im Stillstand. V
Therm Zust Mot %
Thermischer Zustand Frequenzumrichter %
Thermischer Zustand des Bremswiderstands: Nur bei Umrichtern mit hoher Leistung aufrufbar. %
Verbrauch Wh, kWh
Betriebsstunden: Einschaltdauer des Motors. Sekunden,
Betriebszeit Umrichter: Einschaltdauer des Umrichters.
Zeit Temp AI IGBT: Dauer der Alarmauslösung „Temperatur IGBT“. Sekunden
Sollwert PID: Aufrufbar, wenn die Funktion konfiguriert ist. Prozesswert
Istwert PID: Aufrufbar, wenn die Funktion konfiguriert ist.
Fehler PID: Aufrufbar, wenn die Funktion konfiguriert ist.
Ausgang PID: Aufrufbar, wenn die Funktion konfiguriert ist. Hz
tIME, dAY: Durch die Karte „Controller Inside“ erzeugtes Datum mit der aktuellen Uhrzeit; zugänglich bei
vorhandener Karte.
Durch die Karte „Controller Inside“ erzeugtes Wort; zugänglich bei vorhandener Karte.
Durch die Karte „Controller Inside“ erzeugtes Wort; zugänglich bei vorhandener Karte.
Durch die Karte „Controller Inside“ erzeugtes Wort; zugänglich bei vorhandener Karte.
Durch die Karte „Controller Inside“ erzeugtes Wort; zugänglich bei vorhandener Karte.
Durch die Karte „Controller Inside“ erzeugtes Wort; zugänglich bei vorhandener Karte.
Akt. Konfiguration: CnF0, 1 oder 2 (aufrufbar, wenn der Motor- oder Konfigurationswechsel gültig ist -
siehe
Seite 204).
Aktiver Parametersatz: CFP1, 2 oder 3 (aufrufbar, wenn die Umschaltung der Parameter gültig ist -
Seite 199).
siehe
Hz
oder MWh
Minuten oder
Stunden
1755856 12/2009 53

[1.3 EINSTELLUNGEN] (SEt-)
RDY Term +0,00 Hz 0 A
HAUPTMENÜ
1 UMRICHTER MENÜ
2 ZUGRIFFSEBENE
3 LADEN/SPEICHERN ALS
4 ZUGRIFFSCODE
5 SPRACHE
Code Quick
ENT
RDY Term +0,00 Hz 0 A
1 UMRICHTER MENÜ
1.1 SCHNELLSTART MENÜ
1.2 ÜBERWACHUNG
1.3 EINSTELLUNGEN
1.4 ANTRIEBSDATEN
1.5 EIN/ AUSGÄNGE
Code << >> Quick
ENT
RUN Term +50,00 Hz 80 A
1.3 EINSTELLUNGEN
Auflösung Rampe
Hochlaufzeit
Auslaufzeit
Hochlaufzeit 2
Auslaufzeit 2
Code << >> Quick
XXX
SIM-
SEt-
ESC
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
drC-
Anzeige des Zustands des Umrichters
EINSTELLUNGEN
Einschalten
Mit Grafikterminal:
Mit integriertem Terminal:
54 1755856 12/2009

[1.3 EINSTELLUNGEN] (SEt-)
ACHTUNG
UNERWARTETER BETRIEB DES GERÄTS
• Stellen Sie sicher, dass die während des Betriebs an den Einstellungen vo rgenommenen Änderungen keine Gefahr
darstellen.
• Es ist empfehlenswert, die Änderungen bei angehaltenem Umrichter vorzunehmen.
Eine Nichtbeachtung dieser Vorkehrungen kann zum Tod oder schwerwiegenden Verletzungen führen.
Die Einstellparameter können sowohl während des Betriebs als auch im Stillstand geändert werden.
Code Name/Beschreibung Einstellbereich Werkseinstellung
Inr
0.01
ACC
dEC
AC2
g
dE2
g
tA1
g
tA2
g
tA3
g
0.1
M [Auflösung Rampe]
v [0,01]: Rampe bis 99,99 Sekunden
v [0,1]: Rampe bis 999,9 Sekunden
1
v [1]: Rampe bis 6000 Sekunden
Dieser Parameter wird für [Hochlaufzeit] (ACC), [Auslaufzeit] (d EC), [ Hochlaufzeit2] (AC2) und [Auslaufzeit2]
(dE2) verwendet.
M [Hochlaufzeit]
Zeit für den Hochlauf von 0 bis zur [Nennfreq. Motor] (FrS) (Seite 69). Stellen Sie siche r, dass dies er Wert mit
der Antriebsträgheit kompatibel ist.
M [Auslaufzeit]
Zeit für den Auslauf von der [Nennfreq. Motor] (FrS) (Seite 69) bis auf 0. Stellen Sie sicher, dass dieser Wert
mit dem Trägheitsmoment des Antriebs kompatibel ist.
M [Hochlaufzeit 2]
Siehe Seite 140.
Zeit für den Hochlauf von 0 bis zur [Nennfreq. Motor] (FrS). Stellen Sie sicher, dass dieser Wert mit dem
Trägheitsmoment des Antriebs kompatibel ist.
M [Auslaufzeit 2]
Siehe Seite 140.
Zeit für den Auslauf von der [Nennfreq. Motor] (FrS) bis auf 0. Stellen Sie sicher, dass dieser Wert mit dem
Trägheitsmoment des Antriebs kompatibel ist.
M [Rund Start ACC]
Siehe Seite 139.
Rundung des Beginns der Hochlauframpe in % der Rampenzeit [Hochlaufzeit] (ACC)
oder
[Hochlaufzeit 2] (AC2).
M [Rund ACC Ende]
Siehe Seite 139.
- Rundung des Endes der Hochlauframpe in % der Rampenzeit [Hochlaufzeit] (ACC)
oder
[Hochlaufzeit 2] (AC2).
- Einstellbar von 0 bis (100 % - [Rund 1 Start ACC] (tA1)).
M [Rund DEC Start]
Siehe Seite 139.
Rundung des Beginns der Auslauframpe in % der Rampenzeit [Auslaufzeit] (dEC) oder [Auslaufzeit 2] (dE2).
0,01 - 0,1 - 1 0,1
0,01 bis 6000 s (1) 3,0 s
0,01 bis 6000 s (1) 3,0 s
0,01 bis 6000 s (1) 5,0 s
0,01 bis 6000 s (1) 5,0 s
0 bis 100 % 10 %
10 %
0 bis 100 % 10 %
(1)Bereich 0,01 bis 99,99 s oder 0,1 bis 999,9 s oder 1 bis 9999 s gemäß [Auflösung Rampe] (Inr).
Diese Parameter erscheinen nur, wenn die entsprechende Funktion in einem anderen Menü gewählt wurde. Wenn sie auch
g
1755856 12/2009 55
über das Konfigurationsmenü der entsprechenden Funktion aufgerufen und eingestellt werden können, erfolgt zur
Vereinfachung der Programmierung deren detaillierte Beschreibung in diesen Menüs auf den angegebenen Seiten.

[1.3 EINSTELLUNGEN] (SEt-)
Code Name/Beschreibung Einstellbereich Werkseinstellung
tA4
g
M [Rund DEC Ende]
Siehe Seite 139.
- Rundung des Endes der Auslauframpe in % der Rampenzeit [Auslaufzeit] (dEC)
oder
[Auslaufzeit 2] (dE2).
- Einstellbar von 0 bis (100 % - [Rund 3 DEC Start] (tA3)).
10 %
LSP
HSP
ItH
SPG
SIt
SFC
(1)In entspricht dem in der Installationsanleitung oder auf dem Typenschild des Umrichters angegebenen Nennstrom des Umrichters.
M [Kleine Frequenz]
Motorfrequenz mit minimalem Sollwert, Einstellung von 0 bis [Große Fre quenz] (HSP).
M [Große Frequenz]
Motorfrequenz mit maximalem Sollwert, Einstellung von [Kleine Frequenz] (LSP) bis [Max. Ausgangsfreq.]
(tFr). Die Werkseinstellung wechselt auf 60 Hz, wenn [Standard Motorfreq.] (bFr) = [60 Hz NEMA] (60).
M [Therm. Nennstrom]
Strom für den thermischen Schutz des Motors, der entsprechend dem auf dem Typenschild ang egebenen
Bemessungsbetriebsstrom einzustellen ist.
M [P- Ant. v-Regelung]
Proportionalverstärkung der Drehzahlsteuerung.
M [I Anteil Geschw Reg]
Zeitkonstante des I-Anteils der Drehzahlsteuerung.
M [K Filt P Ant Geschw]
Filterkoeffizient für die Drehzahlsteuerung.
0,2 bis 1,5 In (1) Gemäß
0 bis 1000 % 40 %
1 bis 1000 % 100 %
0 bis 100 0
0 Hz
50 Hz
Umrichterleistung
56 1755856 12/2009

[1.3 EINSTELLUNGEN] (SEt-)
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Sollwertstaffelung
Zeit in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Sollwertstaffelung
Zeit in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Sollwertstaffelung
Zeit in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Sollwertstaffelung
Zeit in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Sollwertstaffelung
Zeit in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Sollwertstaffelung
Zeit in ms
Einstellung der Parameter [K Filt P Ant Geschw] (SFC), [P- Ant. v-Regelung] (SPG)
und [I Anteil Geschw Reg] (SIt)
• Diese Parameter sind nur bei einem Profil mit Vektorregelung zugänglich: [Typ Motorsteuerung] (Ctt), Seite 71 = [SVC U] (UUC),
[SVC I] (CUC), [FVC] (FUC), oder [Sync. Motor] (SYn), und wenn [ENA System] (EnA), Seite 81 = [Nein] (nO) ist.
• Diese Werkseinstellungen eignen sich für die meisten Anwendungen.
Allgemein gilt: Einstellung mit [K Filt P Ant Geschw] (SFC) = 0
Der Regler ist vom Typ „IP“, mit Filterung des Drehzahls ollwerts und eignet sich für An wendungen, die Viels eitigkeit und St abilität erford ern
(beispielsweise Hubwerke oder Maschinen mit hoher Trägheit).
• [P- Ant. v-Regelung] (SPG) wirkt auf das Überschwingen der Frequenz.
• [I Anteil Geschw Reg] (SIt) wirkt auf die Bandbreite und die Ansprechzeit.
Anfangsverlauf Verringerung von SIT Verringerung von SIT
Anfangsverlauf Erhöhung von SPG Erhöhung von SPG
1755856 12/2009 57

[1.3 EINSTELLUNGEN] (SEt-)
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Sollwertstaffelung
Zeit in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Sollwertstaffelung
Zeit in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Sollwertstaffelung
Zeit in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Sollwertstaffelung
Zeit in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Sollwertstaffelung
Zeit in ms
0 50045040035030025020015010050
0
1
0,8
0,6
0,4
0,2
Sollwertstaffelung
Zeit in ms
Sonderfall: Parameter [K Filt P Ant Geschw] (SFC) ungleich 0
Dieser Parameter sollte besonderen Anwendungen vorbehalten sein, die eine kurze Antwortzeit erfordern (Lage- oder Wegeregelung
beispielsweise).
- Wenn wie unten dargestellt der Wert 100 eingestellt wird, ist der Regler des Typs „IP“, ohne Filterung des Sollwertes.
- Bei einer Einstellung zwischen 0 und 100 ist der erzielte Betrieb eine Zwischenfrequenz zwischen den nachstehenden und den
auf der vorhergehenden Seite angegebenen Einstellungen.
Beispiel: Einstellung mit [K Filt P Ant Geschw] (SFC) = 100
• [P- Ant. v-Regelung] (SPG) wirkt auf die Bandbreite und die Ansprechzeit.
• [I Anteil Geschw Reg] (SIt) wirkt auf das Überschwingen der Frequenz.
Anfangsverlauf Verringerung von SIT Verringerung von SIT
Anfangsverlauf Erhöhung von SPG Erhöhung von SPG
58 1755856 12/2009

[1.3 EINSTELLUNGEN] (SEt-)
VORSICHT
Stellen Sie sicher, dass der Motor diesem Strom ohne Überhitzen standhält.
Bei Nichtbeachtung dieser Vorkehrung können Materialschäden auftreten.
VORSICHT
Stellen Sie sicher, dass der Motor diesem Strom ohne Überhitzen standhält.
Bei Nichtbeachtung dieser Vorkehrung können Materialschäden auftreten.
Code Name/Beschreibung Einstellbereich Werkseinstellung
GPE
g
GIE
g
UFr
g
SLP
g
dCF
g
IdC
g
M [P- Anteil ENA]
Siehe Seite 81.
M [I-Anteil ENA]
Siehe Seite 81.
M [RI-Kompens.]
Siehe Seite 74.
M [Schlupfkomp.]
Siehe Seite 74.
M [Koeffiz. Schnellhalt]
Siehe Seite 141.
M [Strom DC Brems. 1]
Siehe Seite 142.
Höhe des Bremsstroms bei Gleichstrombremsung, aktiviert über Logikeingang oder als Anhaltemodus
gewählt.
1 bis 9999 250
0 bis 9999 100
25 bis 200 % 100 %
0 bis 300 % 100 %
0 bis 10 4
0,1 bis 1,41 In (1) 0,64 In (1)
tdI
g
IdC2
g
tdC
g
(1)In entspricht dem in der Installationsanleitung oder auf dem Typenschild des Umrichters angegebenen Nennstrom des Umrichters.
g
M [Zeit DC Bremsung 1]
Siehe Seite 142.
Maximale Dauer der Stromaufschaltung [Strom DC Brems. 1] (IdC). Nach Ablauf dieser Zeitspanne wird die
DC-Aufschaltung zu [Strom DC Brems. 2] (IdC2).
M [Strom DC Brems. 2]
Siehe Seite 142.
Stromaufschaltung, die nach Ablauf der Zeit [Zeit DC Bremsung 1] (tdI) über den Logikeingang aktiviert oder
als
Anhaltemodus gewählt wird.
M [Zeit DC Bremsung 2]
Siehe Seite 142.
Maximale Dauer der Aufschaltung [Strom DC Brems. 2] (IdC2) , wenn die Aufschaltung als Anhaltemodus
gewählt wird.
Diese Parameter erscheinen nur, wenn die entsprechende Funktion in einem anderen Menü gewählt wurde. Wenn sie auch
über das Konfigurationsmenü der entsprechenden Funktion aufgerufen und eingestellt werden können, erfolgt zur
Vereinfachung der Programmierung deren detaillierte Beschreibung in diesen Menüs auf den angegebenen Seiten.
0,1 bis 30 s 0,5 s
0,1 In (2) bis [Strom
DC Brems. 1] (IdC)
0,1 bis 30 s 0,5 s
0,5 In (1)
1755856 12/2009 59

[1.3 EINSTELLUNGEN] (SEt-)
VORSICHT
Stellen Sie sicher, dass der Motor diesem Strom ohne Überhitzen standhält.
Bei Nichtbeachtung dieser Vorkehrung können Materialschäden auftreten.
VORSICHT
Stellen Sie sicher, dass der Motor diesem Strom ohne Überhitzen standhält.
Bei Nichtbeachtung dieser Vorkehrung können Materialschäden auftreten.
AdC SdC2 Betrieb
YES
x
Ct
≠ 0
Ct
= 0
Fahrbefehl
Drehzahl
t
SdC1
SdC2
tdC1 tdC1 + tdC2
I
t
SdC1
I
t
SdC1
SdC2
tdC1
I
t
0
t
1
0
Code Name/Beschreibung Einstellbereich Werkseinstellung
SdC1
g
M [I DC-Auto Bremsg 1]
Höhe der Gleichstromaufschaltung im Stillstand. Der Parameter kann aufgerufen werden, wenn sich
[Auto GS- Bremsung] (AdC), Seite 143, von [Nein] (nO) unterscheidet.
Dieser Parameter wird auf 0 forciert, wenn [Typ Motorsteuerung] (Ctt), Seite 71 = [Syn. Motor.] (SYn).
0 bis 1,2 In (1) 0,7 In (1)
tdCI
g
SdC2
g
tdC2
g
M [Zeit aut. DC Brems1]
Dauer der Aufschaltung im Stillstand. Der Parameter kann aufgerufen werden, wenn sich [Auto GS-Bremsung ]
(AdC), Seite
Wenn [Typ Motorsteuerung] (Ctt), Seite 71 = [FVC] (FUC) oder [Syn. Motor.] (SYn), dann entspricht diese Zeit
der Haltezeit bei Drehzahl Null.
143, von [Nein] (nO) unterscheidet.
M [I DC-Auto Bremsg 2]
2. Höhe der Gleichstromaufschaltung im Stillstand.
Der Parameter kann aufgerufen werden, wenn sich [Auto GS-Bremsung] (AdC), Seite 143, von [Nein] (nO)
unterscheidet.
Dieser Parameter wird auf 0 forciert, wenn [Typ Motorsteuerung] (Ctt), Seite 71 = [Syn. Motor.] (SYn).
M [Zeit aut. DC Brems2]
2. Dauer der Aufschaltung im Stillstand.
Der Parameter kann aufgerufen werden, wenn [Auto GS-Bremsung] (AdC), Seite 143 = [Ja] (YES).
0,1 bis 30 s 0,5 s
0 bis 1,2 In (1) 0,5 In (1)
0 bis 30 s 0 s
Hinweis: Wenn [Typ Motorsteuerung] (Ctt),
Seite
71 = [FVC] (FUC):
Dann sind [I DC-Auto Bremsg 1] (SdC1),
[I
DC-Auto Bremsg 2] (SdC2) und [Zeit aut.
DC Brems2] (tdC2) nicht zugänglich. Ein
Zugriff ist nur auf [Zeit aut. DC Brems1]
(tdC1) möglich; dieser Parameter entspricht
einer Haltezeit bei Drehzahl Null.
(1)In entspricht dem in der Installationsanleitung oder auf dem Typenschild des Umrichters angegebenen Nennstrom des Umrichters.
60 1755856 12/2009

[1.3 EINSTELLUNGEN] (SEt-)
VORSICHT
Wenn bei den Umrichtern ATV71p075N4 bis U40N4 die Filter abgeklemmt sind, darf die Taktfrequenz des
Umrichters 4 kHz nicht überschreiten.
Bei Nichtbeachtung dieser Vorkehrung können Materialschäden auftreten.
ACHTUNG
Stellen Sie sicher, dass der Motor diesem Strom standhält, insbesondere dann, wenn es sich um einen
Synchronmotor mit Permanentmagneten handelt, bei dem die Gefahr der Entmagnetisierung besteht.
Bei Nichtbeachtung dieser Vorkehrung können Materialschäden auftreten.
ACHTUNG
Stellen Sie sicher, dass der Motor diesem Strom standhält, insbesondere dann, wenn es sich um einen
Synchronmotor mit Permanentmagneten handelt, bei dem die Gefahr der Entmagnetisierung besteht.
Bei Nichtbeachtung dieser Vorkehrung können Materialschäden auftreten.
Code Name/Beschreibung Einstellbereich Werkseinstellung
SFr
M [Taktfrequenz]
Einstellung der Taktfrequenz.
Einstellbereich: Er kann zwischen 1 und 16 kHz schwanken; die Minimal- und Maximalwerte sowie die
Werkseinstellung können jedoch entsprechend dem Umrichtertyp (ATV71H oder W), der Leistung (Leistung
und Spannung) und der Konfiguration der Parameter [Sinus Filter] (OFI) und [Begr Überspg Motor] (SUL),
Seite
83, begrenzt sein.
Liegt der Wert unter 2 kHz, dann sind [Strombegrenzung] (CLI) und [2. Strombegrenzung] (CL2), Seite 61,
auf 1,36 In begrenzt.
Einstellung während des Betriebs:
- Liegt der Ausgangswert unter 2 kHz, dann sind nicht mehr als 1,9 kHz bei Betrieb möglich.
- Ist der Ausgangswert höher oder gleich 2 kHz, dann sind nicht mehr als 2 kHz bei Betrieb möglich.
Einstellung im Stillstand: Keine Bedingungen.
Hinweis: Bei übermäßiger Erwärmung verringert der Umrichter automatisch die Taktfrequenz und
stellt diese bei normaler Temperatur wieder her.
Hinweis: Wenn [Typ Motorsteuerung] (Ctt), Seite 71 = [FVC] (FUC), sollte die Taktfrequenz nicht auf
einen Wert unter 2 kHz eingestellt werden, da dies zu einer Instabil ität der Frequenz führen kann.
Je nach Baugröße Je nach Baugröße
CLI
CL2
g
M [Strombegrenzung]
Ermöglicht die Strombegrenzung des Motors.
Der Einstellbereich ist auf 1,36 In begrenzt, wenn die [Taktfrequenz] (SFr), Seite 61, unter 2 kHz liegt.
Hinweis: Erfolgt eine Einstellung unter 0,25 In, dann besteht die Gefahr einer Verriegelung mit der
Störung [Verlust Motorphase] (OPF), wenn diese bestätigt wird (siehe Seite 225). Liegt sie unterhalb
des Leerlaufstroms des Motors, spricht die Begrenzung nicht mehr an.
.
M [Wert 2. Strombegr.]
Siehe Seite 188.
Der Einstellbereich ist auf 1,36 In begrenzt, wenn die [Taktfrequenz] (SFr), Seite 61, unter 2 kHz liegt.
Hinweis: Erfolgt eine Einstellung unter 0,25 In, dann besteht die Gefahr einer Verriegelung mit der
Störung [Verlust Motorphase] (OPF), wenn diese bestätigt wird (siehe Seite 225). Liegt sie unterhalb
des Leerlaufstroms des Motors, spricht die Begrenzung nicht mehr an.
0 bis 1,65 In (1) 1,5 In (1)
0 bis 1,65 In (1) 1,5 In (1)
(1)In entspricht dem in der Installationsanleitung oder auf dem Typenschild des Umrichters angegebenen Nennstrom des Umrichters.
Diese Parameter erscheinen nur, wenn die entsprechende Funktion in einem anderen Menü gewählt wurde. Wenn sie auch
g
1755856 12/2009 61
über das Konfigurationsmenü der entsprechenden Funktion aufgerufen und eingestellt werden können, erfolgt zur
Vereinfachung der Programmierung deren detaillierte Beschreibung in diesen Menüs auf den angegebenen Seiten.

[1.3 EINSTELLUNGEN] (SEt-)
VORSICHT
Stellen Sie sicher, dass der Motor diesem Strom ohne Überhitzen standhält.
Bei Nichtbeachtung dieser Vorkehrung können Materialschäden auftreten.
Code Name/Beschreibung Einstellbereich Werkseinstellung
FLU
FnC
FCt
FnO
M [Magnet Mot]
v [nicht perm.] (FnC): Nicht kontinuierlicher Modus.
v [permanent] (FCt): Kontinuierlicher Modus. Diese Wahl ist nicht mögli ch, wenn [Auto GS-Bremsung] (AdC),
Seite
143, gleich [Ja] (YES) ist, oder wenn [Normalhalt] (Stt), Seite 141, gleich [Freier Ausl.] (nSt) ist.
v [Nein] (FnO): Funktion nicht aktiv. Diese Funktion ist nur zugänglich, wenn [Typ Motorsteuerung] (Ctt),
Seite
71 = [SVCI] (CUC) oder [FVC] (FUC).
Wenn [Typ Motorsteuerung] (Ctt), Seite 71 = [SVCI] (CUC), [FVC] (FUC) oder [Sync. Motor (SYn), wird die
Werkseinstellung durch [nicht perm.] (FnC) ersetzt.
Um schnell ein hohes Anlaufmoment zu erreichen, muss zunächst der magnetisc he Fluss im Motor aufgebaut
werden.
• Im Modus [permanent] (FCt) baut der Umrichter den Magnetfluss automat isch ab dem Einschalten auf.
• Im Modus [nicht perm.] (FnC) erfolgt die Magnetisierung bei Anlauf des Motors.
Der Wert des Magnetisierungsstroms ist größer als nCr (konfigurierter Motornennstrom) beim Aufbau des
magnetischen Flusses und wird dann auf den Wert des Magnetisierungsstroms des Motors geregelt...
[Nein] (FnO)
Wenn [Typ Motorsteuerung] (Ctt), Seite 71 = [Sync. Motor] (SYn) , dann bewirkt der Parameter [Magnet Mot]
(FLU) den Abgleich des Rotors und nicht die Magnetisierung.
Wenn sich [Zuord. Bremsanst.] (bLC), Seite 161, von [Nein] (nO) unterscheidet, hat der Parameter [Magnet
Mot] (FLU) keine Auswirkung.
tLS
JGF
g
JGt
g
(1)In entspricht dem in der Installationsanleitung oder auf dem Typenschild des Umrichters angegebenen Nennstrom des Umrichters.
g
M [Betriebsd. bei LSP]
Maximale Betriebsdauer mit [Kleine Frequenz] (LSP) (siehe Seite 44).
Nach Betrieb in LSP während der festgelegten Dauer wird der Auslauf des Motors automatisch befohlen.
Der
Motor läuft wieder an, wenn der Frequenzsollwert über LSP liegt und noch immer ein Fahrbefehl
vorhanden ist.
Achtung: Der Wert 0 entspricht einer unbegrenzten Zeit.
Hinweis: Wenn [Betriebsd. bei LSP] (tLS) nicht gleich 0 ist, wird der Parameter [Normalhalt] (Stt),
Seite 141, auf [StopRampe] (rMP ) ( forciert nur „Anhalten über Rampe“ kann konfiguriert werden).
M [Sollw Schrittbetr.]
Siehe Seite 145.
Sollwert im Schrittbetrieb.
M [Jog-Pause]
Siehe Seite 145.
Verzögerung zum Entprellen bei zwei aufeinander folgenden JOG-Befehlen.
Diese Parameter erscheinen nur, wenn die entsprechende Funktion in einem anderen Menü gewählt wurde. Wenn sie auch
über das Konfigurationsmenü der entsprechenden Funktion aufgerufen und eingestellt werden können, erfolgt zur
Vereinfachung der Programmierung deren detaillierte Beschreibung in diesen Menüs auf den angegebenen Seiten.
0 bis 999,9 s 0 s
0 bis 10 Hz 10 Hz
0 bis 2,0 s 0,5 s
62 1755856 12/2009

[1.3 EINSTELLUNGEN] (SEt-)
Code Name/Beschreibung Einstellbereich Werkseinstellung
SP2
g
SP3
g
SP4
g
SP5
g
SP6
g
SP7
g
SP8
g
SP9
g
SP10
g
SP11
g
SP12
g
SP13
g
SP14
g
M [2. Vorwahlfrequenz]
Siehe Seite 148.
2. Vorwahlfrequenz
M [3. Vorwahlfrequenz]
Siehe Seite 148.
3. Vorwahlfrequenz
M [4. Vorwahlfrequenz]
Siehe Seite 148.
4. Vorwahlfrequenz
M [5. Vorwahlfrequenz]
Siehe Seite 148.
5. Vorwahlfrequenz
M [6. Vorwahlfrequenz]
Siehe Seite 148.
6. Vorwahlfrequenz
M [7. Vorwahlfrequenz]
Siehe Seite 148.
7. Vorwahlfrequenz
M [8. Vorwahlfrequenz]
Siehe Seite 148.
8. Vorwahlfrequenz
M [9. Vorwahlfrequenz]
Siehe Seite 148.
9. Vorwahlfrequenz
M [10. Vorwahlfrequenz]
Siehe Seite 148.
10. Vorwahlfrequenz
M [11. Vorwahlfrequenz]
Siehe Seite 148.
11. Vorwahlfrequenz
M [12. Vorwahlfrequenz]
Siehe Seite 148.
12. Vorwahlfrequenz
M [13. Vorwahlfrequenz]
Siehe Seite 148.
13. Vorwahlfrequenz
M [14. Vorwahlfrequenz]
Siehe Seite 148.
14. Vorwahlfrequenz
0 bis 1600 Hz 10 Hz
0 bis 1600 Hz 15 Hz
0 bis 1600 Hz 20 Hz
0 bis 1600 Hz 25 Hz
0 bis 1600 Hz 30 Hz
0 bis 1600 Hz 35 Hz
0 bis 1600 Hz 40 Hz
0 bis 1600 Hz 45 Hz
0 bis 1600 Hz 50 Hz
0 bis 1600 Hz 55 Hz
0 bis 1600 Hz 60 Hz
0 bis 1600 Hz 70 Hz
0 bis 1600 Hz 80 Hz
Diese Parameter erscheinen nur, wenn die entsprechende Funktion in einem anderen Menü gewählt wurde. Wenn sie auch
g
1755856 12/2009 63
über das Konfigurationsmenü der entsprechenden Funktion aufgerufen und eingestellt werden können, erfolgt zur
Vereinfachung der Programmierung deren detaillierte Beschreibung in diesen Menüs auf den angegebenen Seiten.

[1.3 EINSTELLUNGEN] (SEt-)
Code Name/Beschreibung Einstellbereich Werkseinstellung
SP15
g
SP16
g
MFr
SrP
g
rPG
g
rIG
g
rdG
g
PrP
g
POL
g
POH
g
PAL
g
PAH
g
M [15. Vorwahlfrequenz]
Siehe Seite 148.
15. Vorwahlfrequenz
M [16. Vorwahlfrequenz]
Siehe Seite 148.
16. Vorwahlfrequenz
M [Koeff. Multiplik]
Multiplikationsfaktor, der zugänglich ist, wenn [Multiplikator] (MA2,MA3), Seite 136, dem Grafikterminal
zugeordnet ist.
M [+/- Drehzahl Begr]
Siehe Seite 152.
Begrenzung der Änderung der +/- Drehzahl.
M [P-Anteil PID Regler]
Siehe Seite 177.
Proportionalverstärkung
M [I-Anteil PID Regler]
Siehe Seite 178.
Integralverstärkung
M [D-Anteil PID Regler]
Siehe Seite 178.
D- Anteil PID Regler
M [PID Rampe]
Siehe Seite 178.
Hochlauf-/Auslauframpe des PID, die für einen Bereich von [min Sollw PID] (PIP1) bis [max Sollw PID] (PIP2)
bzw. umgekehrt festgelegt ist.
M [min. PID Ausgang]
Siehe Seite 178.
Minimalwert des Reglerausgangs in Hertz.
M [max. PID Ausgang]
Siehe Seite 178.
Maximalwert des Reglerausgangs in Hertz.
M [Al min Wert Rückm]
Siehe Seite 178.
Unterer Überwachungsschwellwert des Regler-Istwerts.
M [Al max Wert Rückm]
Siehe Seite 178.
Oberer Überwachungsschwellwert des Regler-Istwerts.
0 bis 1600 Hz 90 Hz
0 bis 1600 Hz 100 Hz
0 bis 100 % 100 %
0 bis 50 % 10 %
0,01 bis 100 1
0,01 bis 100 1
0,00 bis 100 0
0 bis 99,9 s 0
-500 bis +500
oder -1600 bis 1600,
je nach Baugröße
0 bis 500 oder 1600,
je nach Baugröße
Siehe Seite 178 (1) 100
Siehe Seite 178 (1) 1000
0 Hz
60 Hz
(1)Ist kein Grafikterminal vorhanden, dann werden auf der vierstelligen Anzeige die Werte über 9999 mit einem Punkt nach der
Tausendereinheit dargestellt, beispielsweise 15.65 für 15650.
Diese Parameter erscheinen nur, wenn die entsprechende Funktion in einem anderen Menü gewählt wurde. Wenn sie auch
g
64 1755856 12/2009
über das Konfigurationsmenü der entsprechenden Funktion aufgerufen und eingestellt werden können, erfolgt zur
Vereinfachung der Programmierung deren detaillierte Beschreibung in diesen Menüs auf den angegebenen Seiten.

[1.3 EINSTELLUNGEN] (SEt-)
Code Name/Beschreibung Einstellbereich Werkseinstellung
PEr
g
PSr
g
rP2
g
rP3
g
rP4
g
Ibr
g
Ird
g
brt
g
bIr
g
bEn
g
tbE
g
M [Alarm Fehler PID]
Siehe Seite 178.
Überwachungsschwellwert der Reglerabweichung.
M [KoefMulti Ref v PID]
Siehe Seite 179.
Multiplikationsfaktor des vorgegebenen Frequenzeingangs.
M [2. vorgew PID-Sollw]
Siehe Seite 181.
Vorgewählter PID-Sollwert.
M [3. vorgew PID-Sollw.]
Siehe Seite 181.
Vorgewählter PID-Sollwert.
M [4. vorgew PID-Sollw.]
Siehe Seite 181.
Vorgewählter PID-Sollwert.
M [I Bremsanzug aufw.]
Siehe Seite 161.
Stromschwellwert der Bremslüftung für den Hebebetrieb oder den Rechtslauf.
M [I Bremsanzug abw.]
Siehe Seite 161.
Stromschwellwert der Bremslüftung für den Senkbetrieb oder den Linkslauf.
M [Zeit Bremsanzug]
Siehe Seite 162.
Bremsabfallverzögerung
M [Freq. Bremsanzug]
Siehe Seite 162.
Schwellwert der Bremsabfallfrequenz (Lüftung Bremse).
M [Freq. Bremsabfall]
Siehe Seite 162.
Schwellwert der Bremsanzugsfrequenz.
M [Verzög. Bremsabfall]
Siehe Seite 162.
Verzögerung vor dem Bremsanzugsbefehl. Zur Verzögerung des Bremsanzugs und nur bei horizontaler
Bewegung, wenn die Bremse bei völligem Stillstand angezogen werden soll.
0 bis 65535 (1) 100
1 bis 100 % 100 %
Siehe Seite 181 (1) 300
Siehe Seite 181 (1) 600
Siehe Seite 181 (1) 900
0 bis 1,32 In (2) 0
0 bis 1,32 In (2) 0
0 bis 5,00 s 0 s
[Autom.] (AUtO)
0 bis 10 Hz
[Auto] (AUtO)
0 bis 10 Hz
0 bis 5,00 s 0 s
[Auto] (AUtO)
[Auto] (AUtO)
(1)Ist kein Grafikterminal vorhanden, dann werden auf der vierstelligen Anzeige die Werte über 9999 mit einem Punkt nach der
Tausendereinheit dargestellt, beispielsweise 15.65 für 15650.
(2)In entspricht dem in der Installationsanleitung oder auf dem Typenschild des Umrichters angegebenen Nennstrom des Umrichters.
Diese Parameter erscheinen nur, wenn die entsprechende Funktion in einem anderen Menü gewählt wurde. Wenn sie auch
g
1755856 12/2009 65
über das Konfigurationsmenü der entsprechenden Funktion aufgerufen und eingestellt werden können, erfolgt zur
Vereinfachung der Programmierung deren detaillierte Beschreibung in diesen Menüs auf den angegebenen Seiten.

[1.3 EINSTELLUNGEN] (SEt-)
Code Name/Beschreibung Einstellbereich Werkseinstellung
bEt
g
JdC
g
ttr
g
tLIM
g
tLIG
g
trH
g
M [T Bremsabfall]
Siehe Seite 162.
Bremsanzugszeit (Ansprechzeit der Bremse).
M [Sprg Freq. n-Invert.]
Siehe Seite 163.
M [Zeit Wiederanlauf]
Siehe Seite 163.
Verzögerung zwischen dem Ende einer Bremsanzugssequenz und dem Beginn einer Bremsabfall sequenz.
M [M Begr. Motor]
Siehe Seite 186.
Drehmomentenbegrenzung bei Generatorbetrieb in Prozent oder 0,1 % des Nennmoments entsprec hend dem
Parameter [Begr Drehm] (IntP) , Seite
M [M Begr. Generator]
Siehe Seite 186.
Drehmomentenbegrenzung bei Generatorbetrieb in Prozent oder 0,1 % des Nennmoments entsprec hend dem
Parameter [Begr Drehm] (IntP) , Seite
M [Traverse HSP]
Siehe Seite 210.
186.
186.
0 bis 5,00 s 0 s
[Auto] (AUtO)
0 bis 10 Hz
0.00 bis 15.00 s 0 s
0 bis 300 % 100 %
0 bis 300 % 100 %
0 bis 10 Hz 4 Hz
[Auto] (AUtO)
trL
g
qSH
g
qSL
g
Ctd
ttH
ttL
M [Traverse LSP]
Siehe Seite 210.
M [Quick Step groß]
Siehe Seite 210.
M [Quick Step klein]
Siehe Seite 210.
M [Strom Schwellwert]
Stromschwellwert der Funktion [Schw. I err.] (CtA), die einem Relais oder einem Logikausgang zugeordnet i st
(siehe Seite
103).
M [Schw. Drehm. hoch]
Oberer Momentenschwellwert der Funktion [Al. hohes M] (ttHA), die einem Relais oder einem Logikausgang
zugeordnet ist (siehe Seite
M [Schw. Drehm. Low]
Unterer Momentenschwellwert der Funktion [Al. Low M] (ttLA), die einem Relais oder einem Logikausgang
zugeordnet ist (siehe Seite
103).
103); in Prozent des Nennmoments.
0 bis 10 Hz 4 Hz
0 bis [Traverse HSP]
(trH)
0 bis [Traverse LSP]
(trL)
0 bis 1,5 In (1) In (1)
-300 % bis +300 % 100 %
-300 % bis +300 % 50 %
0 Hz
0 Hz
(1)In entspricht dem in der Installationsanleitung oder auf dem Typenschild des Umrichters angegebenen Nennstrom des Umrichters.
Diese Parameter erscheinen nur, wenn die entsprechende Funktion in einem anderen Menü gewählt wurde. Wenn sie auch
g
66 1755856 12/2009
über das Konfigurationsmenü der entsprechenden Funktion aufgerufen und eingestellt werden können, erfolgt zur
Vereinfachung der Programmierung deren detaillierte Beschreibung in diesen Menüs auf den angegebenen Seiten.

[1.3 EINSTELLUNGEN] (SEt-)
Code Name/Beschreibung Einstellbereich Werkseinstellung
FqL
g
Ftd
F2d
FFt
g
ttd
g
JPF
JF2
JF3
JFH
M [Schw. Alarm Puls]
Frequenzschwellwert der Funktion [FREQUENZMESSER] (FqF-), Seite 236, die einem Relais oder einem
Logikausgang zugeordnet ist (siehe Seite 103).
M [F.-Schwellw. Mot]
Frequenzschwellwert der Funktion [Freq. err.] (FtA), die einem Relais oder einem Logikausgang zugeordnet
ist (siehe Seite
103 oder von der Funktion [PARAMETERUMSCHALT.] (MLP-), Seite 199, verwendet wird.
M [Schwellwert Freq. 2]
Frequenzschwellwert der Funktion [Freq. 2 err.] (F2A), die einem Relais oder einem Logikausgang zugeo rdnet
ist (siehe Seite
103) oder von der Funktion [PARAMETERUMSCHALT.] (MLP-), Seite 199, verwendet wird.
M [Schw freier Auslauf]
Siehe Seite 141.
Übergang im freien Auslauf am Ende der Rampe oder beim Schnellhalt unter unterem Schwellwert.
Der Parameter ist zugänglich, wenn [Normalhalt] (Stt) = [Schnellhalt] (FSt) oder [StopRampe] (rMP).
v 0,0: Kein Übergang in den freien Auslauf.
v 0,1 bis 1600 Hz: Frequenzschwellwert, bei dem der Motor in den freien Auslauf übergeht.
M [Ther. Schw. Motor]
Siehe Seite 224.
Schwellwert der Auslösung des Alarms „Thermische Überlast“ des Motors (Logikausgang oder Relais).
M [Ausblendfr]
Frequenzausblendung Dieser Parameter lässt einen stationären Betrieb in einem einstellbaren Bereich
nahe
der eingestellten Frequenz nicht zu. Mit dieser Funktion kann eine kritische Frequenz unterdrückt
werden, die eine Resonanz herbeiführen könnte. Die Einstellung auf 0 deaktiviert die Funktion.
M [Ausblendfr.2]
2. Frequenzausblendung Dieser Parameter lässt einen stationären Betrieb in einem einstellbaren Bereich
nahe
der eingestellten Frequenz nicht zu. Mit dieser Funktion kann eine kritische Frequenz unterdrückt
werden, die eine Resonanz herbeiführen könnte. Die Einstellung auf 0 deaktiviert die Funktion.
M [3. Ausblend Freq.]
3. Frequenzausblendung Dieser Parameter lässt einen stationären Betrieb in einem einstellbaren Bereich
nahe
der eingestellten Frequenz nicht zu. Mit dieser Funktion kann eine kritische Frequenz unterdrückt
werden, die eine Resonanz herbeiführen könnte. Die Einstellung auf 0 deaktiviert die Funktion.
M [Hyst. Ausblend Freq]
Der Parameter ist sichtbar wenn mindestens eine Ausblendfrequenz [Ausblendfrequenz] (JPF),
[Ausblendfrequenz 2] (JF2) oder [3rd Ausblendfrequenz] (JF3) ungleich 0 ist
Bereich für die Frequenzausblendung: von (JPF – JFH) bis (JPF + JFH) beispielsweise.
Diese Einstellung gilt für alle 3 Frequenzen JPF, JF2 und JF3 gemeinsam.
0 Hz bis 30,00 Hz 0 Hz
0,0 bis 1600 Hz [Große Frequenz]
(HSP)
0,0 bis 1600 Hz [Große Frequenz]
(HSP)
0,0 bis 1600 Hz 0,0 Hz
0 bis 118 % 100 %
0 bis 500 oder 1600 Hz,
je nach Baugröße
0 bis 500 oder 1600 Hz,
je nach Baugröße
0 bis 500 oder 1600 Hz,
je nach Baugröße
0,1 bis 10 Hz 1 Hz
0 Hz
0 Hz
0 Hz
LbC
g
trt
T
g
1755856 12/2009 67
M [Korr Lastverteilung]
Korrektur des Nennwerts in Hertz. Siehe Seite 85.
M [Koeff Drehmoment]
Auf [Ref. Drehm.] (tr1) angewandter Faktor.
Diese Parameter erscheinen nur, wenn die entsprechende Funktion in einem anderen Menü gewählt wurde. Wenn sie auch
über das Konfigurationsmenü der entsprechenden Funktion aufgerufen und eingestellt werden können, erfolgt zur
Vereinfachung der Programmierung deren detaillierte Beschreibung in diesen Menüs auf den angegebenen Seiten.
0 bis 1000 Hz 0
0 bis 1000 % 100 %

[1.4 ANTRIEBSDATEN] (drC-)
RDY Term +0,00 Hz 0 A
HAUPTMENÜ
1 UMRICHTER MENÜ
2 ZUGRIFFSEBENE
3 LADEN/SPEICHERN ALS
4 ZUGRIFFSCODE
5 SPRACHE
Code Quick
ENT
RDY Term +0,00 Hz 0 A
1 UMRICHTER MENÜ
1.1 SCHNELLSTART MENÜ
1.2 ÜBERWACHUNG
1.3 EINSTELLUNGEN
1.4 ANTRIEBSDATEN
1.5 EIN/ AUSGÄNGE
Code << >> Quick
ENT
RUN Term +50,00 Hz 80 A
1.4 ANTRIEBSDATEN
Standard Motorfreq.
Motornennleistung
Nennspannung Mot.
Nennstrom Motor
Nennfreq. Motor
Code << >> Quick
XXX
SIM-
I-O-
ESC
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
drC-
Anzeige des Zustands des Umrichters
ANTRIEBSDATEN
Einschalten
Mit Grafikterminal:
Mit integriertem Terminal:
68 1755856 12/2009

[1.4 ANTRIEBSDATEN] (drC-)
100 - Schlupf in %
100
50 - Schlupf in Hz
50
60 - Schlupf in Hz
60
Die Parameter des Menüs [1.4 ANTRIEBSDATEN] (drC-) sind nur im Stillstand und ohne Fahrbefehl änderbar, mit folgender Ausnahme:
• [Motormess.] (tUn) , Seite 70, bewirkt das Einschalten des Motors.
• Parameter, die das Zeichen T in der Spalte Code enthalten, können während des Betriebs und im Stillstand geändert werden.
Code Name/Beschreibung Einstellbereich Werkseinstellung
bFr
nPr
UnS
nCr
FrS
M [Standard Motorfreq.]
50
60
v [50 Hz IEC] (50): IEC
v [60 Hz NEMA] (60): NEMA
Dieser Parameter ändert die Voreinstellung folgender Parameter: [Große Frequenz] (HSP), Seite 44, [F-Schwellw.
Mot] (Ftd), Seite 67, [Nennspannung Mot.] (UnS), [Nennfr eq. Motor] (FrS) und [Max. Ausgangsfreq.] (tFr) weiter
unten.
M [Motornennleistung]
Der Parameter ist nicht zugänglich, wenn [Typ Motorsteuerung] (Ctt), Seite 71 = [Sync. Motor] (SYn).
Motornennleistung gemäß Typenschild; in kW, wenn [Standard Motorfreq.] (bFr) = [50 Hz IEC] (50); in HP, wenn
[Standard Motorfreq.] (bFr) = [60 Hz NEMA] (60).
M [Nennspannung Mot.]
Der Parameter ist nicht zugänglich, wenn [Typ Motorsteuerung] (Ctt), Seite 71 = [Sync. Motor] (SYn).
Nennspannung des Motors gemäß Typenschild.
ATV71pppM3: 100 bis 240 V - ATV71pppN4: 200 bis 480 V - ATV71pppY: 400 bis 690 V.
M [Nennstrom Motor]
Der Parameter ist nicht zugänglich, wenn [Typ Motorsteuerung] (Ctt), Seite 71 = [Sync. Motor] (SYn).
Nennstrom des Motors gemäß Typenschild.
M [Nennfreq. Motor]
Der Parameter ist nicht zugänglich, wenn [Typ Motorsteuerung] (Ctt), Seite 71 = [Sync. Motor] (SYn).
Nennfrequenz des Motors gemäß Typenschild.
Die Werkseinstellung beträgt 50 Hz und wird durch eine Voreinstellung von 60 Hz ersetzt, wenn [Standard
Motorfreq.] (bFr) auf 60 Hz gesetzt wird.
Der maximale Wert ist auf 500 Hz begrenzt, wenn sich [Typ Motorsteuerung] (Ctt) , Seite 71), von U/f
unterscheidet oder bei den Umrichtern ATV71pppY oder größeren Umrichtermodellen als ATV71HD37.
Die Werte von 500 Hz bis 1600 Hz sind nur bei U/f-Steuerung möglich und für Leistungen bis max. 37 kW.
Konfigurieren Sie in diesem Fall [Typ Motorsteuerung] (Ctt) vor [Nennfreq. Moto r] (FrS).
[50 Hz IEC] (50)
Gemäß
Umrichterleistung
Gemäß
Umrichterleistung
0,25 bis 1,5 In (1) Gemäß
10 bis 1600 Hz 50 Hz
Gemäß
Umrichterleistung
Gemäß
Umrichterleistung und
[Standard Motorfreq.]
(bFr)
Umrichterleistung und
[Standard Motorfreq.]
(bFr)
InSP
nSP
(1)In entspricht dem in der Installationsanleitung und auf dem Typenschild des Umrichters angegebenen Nennstrom des Umrichters.
1755856 12/2009 69
M [Inkremente Upm]
Inkrement des Parameters [Motornenndrehzahl] (nSP).
1
10
v [x1 tr/mn] (1): Inkrement von 1 U/min; wird verwendet, wenn die [Motornenndrehzahl] (nSP) 65535 U/min
nicht überschreitet.
v [x10 tr/mn] (10): Inkrement von 10 U/min; wird verwendet, wenn die [Motornenndrehzahl] (nSP) 65535 U/min
überschreitet.
M [Motornenndrehzahl]
Der Parameter ist nicht zugänglich, wenn [Typ Motorsteuerung] (Ctt), Seite 71 = [Sync. Motor] (SYn).
Nenndrehzahl des Motors gemäß Typenschild. Einstellbar von 0 bis 65535 U/min, wenn [Inkremente Upm]
(InSP) = [x1 tr/mn] (1) oder von 0.00 bis 96.00 kU/min, wenn [Inkremente Upm] (InSP) = [x10 tr/mn] (10).
0 bis 9999 U/min, danach 10.00 bis 65.53 kU/min oder 96.00 kU/min auf der integrierten Anzeige.
Gibt das Typenschild nicht die Nenndrehzahl, sondern die Synchrondrehzahl und den Schlupf in Hertz oder
Prozent an, dann errechnet sich die Nenndrehzahl wie folgt:
• Nenndrehzahl = Synchrondrehzahl x
oder
• Nenndrehzahl = Synchrondrehzahl x (50 Hz-Motoren)
oder
• Nenndrehzahl = Synchrondrehzahl x (60 Hz-Motoren)
Hinweis 1: Jede Änderung von [Inkremente Upm] (InSP) stellt den Parameter [Motornenndrehzahl]
(nSP) auf die Werkseinstellung zurück.
Hinweis 2: Für die ATV71pppY Baureihe ist [Inkremente Upm] (InSP) auf 1 fixiert
0 bis 96000 U/min Gemäß
[x1 tr/mn] (1)
Umrichterleistung

[1.4 ANTRIEBSDATEN] (drC-)
Code Name/Beschreibung Werkseinstellung
tFr
tUn
dOnE
AUt
tUS
PEnd
PrOG
FAIL
dOnE
nO
YES
nO
YES
tAb
CUS
M [Max. Ausgangsfreq.]
Die Werkseinstellung beträgt 60 Hz und wird durch eine Voreinstellung vo n 72 Hz ersetzt, wenn d er Parameter
[Standard Motorfreq.] (bFr) auf 60 Hz eingestellt wird.
Der maximale Wert wird durch folgende Bedingungen eingeschränkt:
• Er kann den Wert der [Nennfreq. Motor] (FrS) nur um das 10 fache überschreiten.
• Er kann 500 Hz nur überschreiten, wenn [Typ Motorsteuerung] (Ctt) (S eite 71), von U/f unterscheidet oder bei
den Umrichtern ATV71pppY oder größeren Umrichtermodellen als ATV71HD37.
Die Werte von 500 Hz bis 1600 Hz sind nur bei U/f-Steuerung möglich und für Leistungen bis max. 37 kW.
Konfigurieren Sie in diesem Fall [Typ Motorsteuerung] (Ctt) vor [Max. Ausgangsfreq.] (tFr).
M [Motormess.]
10 bis 1600 Hz
[Nein] (nO)
v [Nein] (nO): Motormessung nicht erfolgt.
v [Ja] (YES): Die Motormessung erfolgt sobald wie möglich. Der Parameter wechselt dann automatisch auf
[Ausgeführt] (dOnE).
v [Ausgeführt] (dOnE): Verwendung der Werte, die sich durch die vorherige Motormessung ergeben.
Achtung:
• Es ist dringend erforderlich, dass alle Motorparameter vor der Ausführung der Motormessung
ordnungsgemäß konfiguriert sind.
- Asynchronmotor: [Nennspannung Mot.] (UnS), [Nennfreq. Motor] (FrS), [Nennstrom Motor] (nCr),
[Motornenndrehzahl] (nSP), [Motornennleistung] (nPr)
- Synchronmotor: [Nennstr.Synchr.Mot] (nCrS), [Nenndrehz syn Mot] (nSPS), [Polpaar sync. Mot.] (PPnS),
[EMK Konst syn Mot] (PHS), [Hauptfeld Indukt.] (LdS), [Streufeld Indukt.] (LqS)
Wenn einer dieser Parameter geändert wird, nachdem die Motormessung durchgeführt wurde, wechselt
[Motormess.] (tUn) auf [Nein] (nO) und muss erneut durchgeführt werden.
• Die Motormessung wird nur dann durchgeführt, wenn kein Haltebefehl erteilt wurde. Wenn die Funktion
„Freier Auslauf“ oder „Schnellhalt“ einem Logikeingang zugeor dnet wurde, muss dieser Eingang auf 1 ge setzt
werden (Eingang auf 0 aktiv).
• Die Motormessung hat Vorrang vor eventuellen Fahr- oder Vormagnetisierungsbefehlen, die nach der
Motormessungssequenz berücksichtigt werden.
• Wenn die Motormessung misslingt, zeigt der Umrichter [Nein] (nO) an und kann je nach Konfiguration von
[Mgt Fehler Mot. Mes] (tnL), Seite
• Die Motormessung kann 1 bis 2 Sekunden dauern. Unterbrechen Sie den Vorgang nicht und warten Sie ab,
bis die Anzeige zu „[ausgeführt] (dOnE)“ oder auf „[Nein] (nO)“ wechselt.
Hinweis: Während der Motormessung fließt Nennstrom durch den Motor.
M [autom Motormess.]
239, in den Fehlermodus [Motormess.] (tnF) wechseln.
[Nein] (nO)
v [Nein] (nO): Funktion nicht aktiv.
v [Ja] (YES): Die Motormessung erfolgt bei jedem Einschalten.
Achtung: Es gelten die gleichen Anmerkungen wie für [Motormess.] (tUn) weiter oben.
Hinweis : Bei der Einstellung [Profil] (CHCF) = [8 Serie] (SE8), ist Autotuning [Automatic autotune] (AUt) auf
[No] (nO) fixiert.
M [Zust. Mot.-messung]
Nur zur Information, nicht parametrierbar.
[Nicht ausg.] (tAb)
v [Nicht ausg.] (tAb): Der Standardwert des Statorwiderstands wird verwendet, um den Motor zu steuern.
v [Warten] (PEnd): Die Motormessung wurde angefordert, aber noch nicht ausgefüh rt.
v [Aktiv] (PrOG): Motormessung aktiv.
v [Fehlerhaft] (FAIL): Die Motormessung ist fehlgeschlagen.
v [Ausgeführt] (dOnE): Der von der Motormessfunktion gemessene Statorwiderstand wird verwend et,
um
den Motor zu steuern.
v [kundenspez] (CUS): Die Motormessung wurde durchgeführt, aber anschließend wurde mindestens ein
durch diese Motormessung festgelegter Parameter geändert. Der Parameter [Motormess.] (tUn) wechselt
dann wieder auf [Nein] (nO). Die betroffenen Parameter für die Motormessung sind:
[R.Stat eing.synMot] (rSAS), Seite 74, [R1w] (rSA), [Idw] (IdA), [LFw] (LFA ) und [T2w] (trA), Seite 75.
PHr
AbC
ACb
70 1755856 12/2009
M [Phasendrehung]
v [ABC] (AbC): Normale Drehrichtung.
v [ACB] (ACb): Umgekehrte Drehrichtung.
Mit diesem Parameter kann die Drehrichtung des Motors ohne Inverti erung der Verkabelung geändert werden.
Ändern Sie den Parameter [Phasendrehung] (PHr) nicht, wenn [Typ Motorsteuerung] (Ctt),
Seite 71 = [FVC] (FUC). In diesem Fall sollte die Drehrichtung eventuell vor oder während der
Überprüfung des Encoders geändert werden (Seite 78), während sich[Typ Motorsteuerung] (Ctt)
von [FVC] (FUC) unterscheidet.
[ABC] (AbC)

[1.4 ANTRIEBSDATEN] (drC-)
Spannung
Frequenz
FrS
UnS
U0
Die Kennlinie ergibt
sich aus den Werten
der Parameter UnS,
FrS und U0.
Spannung
Frequenz
FrS
UnS
U5
U4
U3
U1
U2
U0
F1 F2
F3
F4 F5
FrS > F5 > F4 > F3 > F2 > F1
Die Kennlinie ergibt
sich aus den Werten
der Parameter UnS,
FrS, U0 bis U5 und
F0 bis F5.
Code Name/Beschreibung Einstellbereich Werkseinstellung
Ctt
UUC
CUC
FUC
UF2
M [Typ Motorsteuerung]
[SVC U] (UUC)
v [SVC U] (UUC): Vektorielle Regelung der Spannung im offenen Regelkreis mit automatischer
Schlupfkompensation, in Abhängigkeit der Last. Dieser Steuerungstyp ist empfehlenswert, wenn ein ATV58
ersetzt wird. Ermöglicht den Betrieb mit mehreren Motoren, wenn diese identisch und parallel an denselben
Umrichter angeschlossen sind.
v [SVC I] (CUC): Vektorielle Regelung des Stroms im offenen Re gelkreis. Diese r Steuer ungstyp ist empfehlenswer t,
wenn ein ATV58F ersetzt wird, der im Modus „offener Regelkreis“ ver wendet wird. Er kann nicht für den Betrieb
mit mehreren Motoren eingesetzt werden, die parallel an denselben Umrichter angeschlossen sind.
v [FVC] (FUC): Vektorielle Regelung des Stroms im geschlossenen Regelkreis für Motoren mit Gebern des
Typs Inkrementalgeber; diese Wahl ist nu r möglich, wenn eine Inkremental geber-Karte vorhanden ist. Wird ein
Encoder verwendet, der nur ein Signal "A" ausgibt, ist diese Funktion nicht möglich.
Dieser Typ weist in Bezug auf Drehzahl- und Momentengenauigkeit die beste Leistung auf und kann ein Moment
bei Drehzahl Null erreichen. Er kann nicht für den Betrieb mit mehreren Motoren ein gesetzt werden, die parallel
an denselben Umrichter angeschlossen sind.
Die Überprüfung des Encoders, Seite 78, muss unbedingt mit Erfolg durchgeführt werden,
bevor der Parameter [FVC] (FUC) gewählt wird.
v [U/f Reg 2P] (UF2): Einfache U/f-Kennlinie, ohne Schlupfkompensation. Ermöglicht den Betr ieb mit folgenden
Motoren:
- Sondermotoren (Schleifringläufer, Kolbenrotor usw.)
- Mehrere an denselben Umrichter parallel geschaltete Motoren
- Motoren mit hoher Drehzahl
- Motoren mit niedriger Leistung im Vergleich zum Umrichter
UF5
SYn
1755856 12/2009 71
v [U/f Reg 5P] (UF5): U/f-Kennlinie mit 5 Segmenten : Wie die U/f-Kennlinie mit 2 Punkten, zusätzlich lassen sich
jedoch mögliche Resonanzphänomene (Sättigung) vermeiden.
v [Syn. Motor] (SYn): Nur für Synchronmotoren mit Perm anentmagneten und mit sinusförmiger Quellenspannung
(Va). Diese Wahl ist nicht zulässig mit den Modellen ATV71ppppY ( 500 bis 690 V).
Diese Wahl unterbindet den Zugriff auf die Parameter von Asynchron motoren, ermöglicht jedoch den Zugriff auf
die Parameter von Synchronmotoren.

[1.4 ANTRIEBSDATEN] (drC-)
Code Name/Beschreibung Einstellbereich Werkseinstellung
U0
U1
F1
U2
F2
U3
F3
U4
F4
U5
F5
M [U0]
M [U1]
M [F1]
M [U2]
M [F2]
M [U3]
M [F3]
M [U4]
M [F4]
M [U5]
M [F5]
0 bis 600 oder 1000,
je nach Baugröße
Einstellung der U/f-Kennlinie. Der Parameter ist zugänglich, wenn [Typ Motorsteuerung] (Ctt) = [U/f Reg 2P]
(UF2) oder [U/f Reg 5P] (UF5).
0 bis 600 oder 1000,
je nach Baugröße
Einstellung der U/f-Kennlinie. Der Parameter ist zugänglich, wenn [Typ Motorsteuerung] (Ctt) = [U/f Reg 5P] (UF5).
0 bis 1600 Hz 0
Einstellung der U/f-Kennlinie. Der Parameter ist zug änglich, wenn [Typ Motorsteuerung] (Ctt) = [U/f Reg 5P] (UF5).
0 bis 600 oder 1000,
je nach Baugröße
Einstellung der U/f-Kennlinie. Der Parameter ist zugänglich, wenn [Typ Motorsteuerung] (Ctt) = [U/f Reg 5P] (UF5).
0 bis 1600 Hz 0
Einstellung der U/f-Kennlinie. Der Parameter ist zug änglich, wenn [Typ Motorsteuerung] (Ctt) = [U/f Reg 5P] (UF5).
0 bis 600 oder 1000,
je nach Baugröße
Einstellung der U/f-Kennlinie. Der Parameter ist zug änglich, wenn [Typ Motorsteuerung] (Ctt) = [U/f Reg 5P] (UF5).
0 bis 1600 Hz 0
Einstellung der U/f-Kennlinie. Der Parameter ist zug änglich, wenn [Typ Motorsteuerung] (Ctt) = [U/f Reg 5P] (UF5).
0 bis 600 oder 1000,
je nach Baugröße
Einstellung der U/f-Kennlinie. Der Parameter ist zug änglich, wenn [Typ Motorsteuerung] (Ctt) = [U/f Reg 5P] (UF5).
0 bis 1600 Hz 0
Einstellung der U/f-Kennlinie. Der Parameter ist zug änglich, wenn [Typ Motorsteuerung] (Ctt) = [U/f Reg 5P] (UF5).
0 bis 600 oder 1000,
je nach Baugröße
Einstellung der U/f-Kennlinie. Der Parameter ist zug änglich, wenn [Typ Motorsteuerung] (Ctt) = [U/f Reg 5P] (UF5).
0 bis 1600 Hz 0
Einstellung der U/f-Kennlinie. Der Parameter ist zug änglich, wenn [Typ Motorsteuerung] (Ctt) = [U/f Reg 5P] (UF5).
0
0
0
0
0
0
72 1755856 12/2009

[1.4 ANTRIEBSDATEN] (drC-)
Motorspannung
Frequenz
Nennfrequenz FrS
Maximale Spannung UCP
Maximale Frequenz FCP
Nennspannung UnS
Code Name/Beschreibung Einstellbereich Werkseinstellung
UC2
UCP
FCP
nO
YES
M [Vector control 2Pkt]
Der Parameter ist zugänglich, wenn [Typ Motorsteuerung] (Ctt) von [Sync. Motor] (SYn) abweicht.
v [Nein] (nO): Funktion nicht aktiv.
v [Ja] (YES): Funktion aktiv.
Wird für Anwendungen herangezogen, bei denen zwecks Optimierung des Betriebs bei konstanter Leistung
eine Überschreitung der Drehzahl und der Nennfre quenz des Motors gewünscht wi rd oder wenn die maximale
Motorspannung auf einen Wert unterhalb der Netzspannung begrenzt werden soll.
Die Kennlinie der Frequenzspannung muss daher den Möglichkeiten des Motors angepasst werden, so dass
dieser unter der maximalen Spannung UCP und der maximalen Frequenz FCP betrieben werden kann.
M [Spg konst. Leistung]
Der Parameter kann aufgerufen werden, wenn [Vector control 2Pkt] (UC2) = [Ja] (YES).
M [Freq Konst Leistung]
Der Parameter kann aufgerufen werden, wenn [Vector control 2Pkt] (UC2) = [Ja] (YES).
Gemäß
Umrichterleistung
Gemäß
Umrichterleistung
und
[Nennfreq. Motor]
(FrS)
[Nein] (nO)
Gemäß
Umrichterleistung
und
[Standard
Motorfreq.] (bFr)
= [Standard
Motorfreq.] (bFr)
1755856 12/2009 73

[1.4 ANTRIEBSDATEN] (drC-)
Parameter von Synchronmotoren:
Diese Parameter sind zugänglich, wenn [Typ Motorsteuerung] (Ctt), Seite 71 = [Syn. Motor] (SYn). In diesem Fall ist kein Zugriff auf die
Parameter von Asynchronmotoren möglich.
Code Name/Beschreibung Einstellbereich Werkseinstellung
nCrS
nSPS
PPnS
PHS
LdS
LqS
rSAS
M [Nennstr.Synchr.Mot]
Nennstrom des Synchronmotors gemäß Typenschild.
M [Nenndrehz syn Mot]
Nenndrehzahl des Synchronmotors gemäß Typenschild.
0 bis 9999 U/min, danach 10.00 bis 60.00 kU/min auf der integrierten Anzeige.
M [Polpaar synchr.Mot]
Anzahl der Polpaare des Synchronmotors.
M [EMK Konst syn Mot]
EMK-Konstante (FEM) des Synchronmotors in mV pro 1000 U/min (Spitzenspannung pro Phase).
0 bis 9999, danach 10.00 bis 65.53 (10000 bis 65536) auf der integrierten Anzeige.
M [Hauptfeld Indukt.]
Stator-Induktivität Achse „d“ (Hauptfeld) in mH (pro Phase).
Bei Motoren mit Vollpolen: [Hauptfeld Indukt.] (LdS) = [Streufeld Indukt] (LqS) = Stator-Induktivität L.
M [Streufeld Indukt.]
Stator-Induktivität Achse „q“ (Streufeld) in mH (pro Phase).
Bei Motoren mit Vollpolen: [Hauptfeld Indukt.] (LdS) = [Streufeld Indukt] (LqS) = Stator-Induktivität L.
M [R.Stat eing.synMot]
Stator-Kaltwiderstand (durch Wicklung). Wird die Motormessung durchgeführt, dann wird die Werkseinstellung
durch das Ergebnis ersetzt.
Der Wert kann vom Benutzer eingegeben werden, wenn ihm dieser bekannt ist.
Wert in Milliohm (mΩ) bis zu 75 kW, in Mikroohm (mΩ/100) über 75 kW.
0 bis 9999, danach 10.00 bis 65.53 (10000 bis 65536) auf der integrierten Anzeige.
0,25 bis 1,5 In (2) Gemäß
Umrichterleistung
0 bis 60000 U/min Gemäß
Umrichterleistung
1 bis 50 Gemäß
Umrichterleistung
0 bis 65535 Gemäß
Umrichterleistung
0 bis 655,3 Gemäß
Umrichterleistung
0 bis 655,3 Gemäß
Umrichterleistung
Gemäß
Umrichterleistung
Gemäß
Umrichterleistung
Code Name/Beschreibung Einstellbereich Werkseinstellung
UFr
T
SLP
T
(1)Der Zugriff auf diesen Parameter ist auch über das Menü [1.3 EINSTELLUNGEN] (SEt-) möglich.
(2)In entspricht dem in der Installationsanleitung und auf dem Typenschild des Umrichters angegebenen Nennstrom des Umrichters.
T
M [IR-Kompens.]
Der Parameter ist zugänglich, wenn [Typ Motorsteuerung] (C tt) von [U/F Reg 2P] (UF2) und von [U/F Reg 5P]
(UF5) abweicht.
Ermöglicht die Optimierung des Drehmoments bei sehr niedriger Drehzahl ([IR-Kompens.] (UFr) erhöhen, falls
das Drehmoment nicht ausreicht).
Stellen Sie sicher, dass der Wert von [IR-Kompens.] (UFr) im Hinblick auf den erhitzten Motor nicht zu hoch liegt
(Gefahr der Instabilität).
M [Schlupfkomp.]
Der Parameter ist zugänglich, wenn [Typ Motorsteuerung] (C tt) von [U/f Reg 2P] (UF2), von [U/f Reg 5P] (UF5)
und von [Sync.
Ermöglicht den Abgleich der durch Eingabe der Motornennd rehzahl festgeleg ten Schlupfko mpensation.
Die Frequenzangaben auf den Motortypenschildern sind nicht unbedingt exakt.
• Ist die eingestellte Schlupffrequenz < als die tatsächliche Schlupffrequenz, dann läuft der Motor nicht mit der
korrekten Drehzahl im eingestellten Betrieb, sondern mit einer Drehzahl, die unter dem Sollwert liegt.
• Ist die eingestellte Schlupffrequenz > als die tatsächliche Schlupffrequenz, so ist die Kompensation des Motors
zu hoch und die Drehzahl unstabil.
Parameter, der bei Betrieb und im Stillstand geändert werden kann.
Motor] (SYn) abweicht.
(1)
(1) 0 bis 300% 100%
25 bis 200% 100%
74 1755856 12/2009

[1.4 ANTRIEBSDATEN] (drC-)
Im Modus [Experte] aufrufbare Motorparameter
Hierunter fallen:
• Parameter, die vom Umrichter während der Motormessung berechnet werden (nur Lesezugriff). Zum Beispiel R1r, berechneter
Stator-Kaltwiderstand.
• Die Möglichkeit, gegebenenfalls einige der berechneten Parameter durch andere We rte zu ersetzen. Zum Beispiel R1w, gemessener
Stator-Kaltwiderstand.
Ändert der Benutzer einen Parameter Xyw, dann verwendet der Umrichter diesen an Stelle des berechneten Parameters Xyr.
Asynchronmotor
Wird eine Motormessung durchgeführt oder einer der Motorparameter, die eine Motormessung voraussetzen, geändert: ([Nennspannung
Mot.] (UnS), [Nennfreq. Motor] (FrS), [Nennstrom Motor] (nCr), [Motornenndrehzahl] (nSP), [Motornennleistung] (nPr)), dan n wechseln die
Parameter Xyw zurück zur Werkseinstellung.
Code Name/Beschreibung
rSM
IdM
LFM
trM
nSL
PPn
rSA
M [R Stator gemessen]
Vom Umrichter berechneter Stator-Kaltwiderstand, nur Lesezugriff. Wert in Milliohm (mΩ) bis zu 75 kW,
Hunderstel Milliohm (m
M [Errechn MagnStrom]
Vom Umrichter berechneter Magnetisierungsstrom in A, nur Lesezugriff.
M [Errechnet. Streufeld]
Vom Umrichter berechnete Streuinduktivität in mH, nur Lesezugriff.
M [T2r]
Vom Umrichter berechnete Läufer-Zeitkonstante in mS, nur Lesezugriff.
M [NSLr]
Vom Umrichter berechneter Nennschlupf in Hertz, nur Lesezugriff.
Zur Änderung des Nennschlupfs ist die [Motornenndrehzahl] (nSP) (Seite 69) zu ändern.
M [Polpaarzahl]
Vom Umrichter berechnete Anzahl der Polpaare, nur Lesezugriff.
M [R.Stat eing. Mot]
Stator-Kaltwiderstand (durch Wicklung), änderbarer Wert. Wert in Milliohm (mΩ) bi s zu 75 kW, Hund erstel
Milliohm (m
Anzeige.
Ω/100) über 75 kW. 0 bis 9999, danach 10.00 bis 65.53 (10000 bis 65536) auf der integrierten
Ω/100) über 75 kW.
IdA
LFA
trA
1755856 12/2009 75
M [eingest. MagnStrom]
Magnetisierungsstrom in A, änderbarer Wert.
M [eingest. Streufluss]
Streuinduktivität in mH, änderbarer Wert.
M [eingest Zeitk Rotor]
Läufer-Zeitkonstante in ms, änderbarer Wert.

[1.4 ANTRIEBSDATEN] (drC-)
Synchronmotor
Code Name/Beschreibung
rSMS
FrSS
M [R Stat gem. synMot]
Stator-Kaltwiderstand (durch Wicklung), nur Lesezugriff. Di es ist die Werkseinstellung des Umrich ters oder
das Ergebnis der Motormessung, falls diese durchgeführt wurde.
Wert in Milliohm (mΩ) bis zu 75 kW, Hunderstel Milliohm (mΩ/100) über 75 kW.
0 bis 9999, danach 10.00 bis 65.53 (10000 bis 65536) auf der integrierten Anz eige.
M [Nennfreq. Sync Mot]
Vom Umrichter berechnete Motorfrequenz mit Nenndrehzahl in Hertz (Motornennfrequenz), nur
Lesezugriff.
76 1755856 12/2009

[1.4 ANTRIEBSDATEN] (drC-)
Wahl des Encoders
Beachten Sie die Empfehlungen im Katalog und in der Installationsanleitung.
Code Name/Beschreibung Einstellbereich Werkseinstellung
EnS
AAbb
PGI
(1)Der Zugriff auf geberspezifische Parameter ist nur mögli ch, wenn die Encoder-Karte v orhanden ist. Di e verfügbare Aus wahl ist vom Typ
der verwendeten Encoder-Karte abhängig. Auf die Konfiguration des Encoders kann auch über das Menü [1.5 EIN/ AUSGÄNGE] (I/O)
zugegriffen werden.
M [Encoder Signal]
Der Parameter ist zugänglich, wenn eine Inkrementalgeber-Karte vorhanden ist (1).
Entsprechend dem verwendeten Karten- und Encodertyp zu konfigurieren.
v [AABB] (AAbb): Für die Signale A, A-, B, B-.
Ab
A
v [AB] (Ab): Für die Signale A, B..
v [A] (A): Für Signal A. Wert nicht zugänglich, wenn [Encoder aktiv] (EnU), Seite 79 = [Regelung] (rEG). =
[Regelung] (rEG).
M [Anzahl Impulse]
Anzahl Impulse pro Umdrehung des Encoders.
Der Parameter ist zugänglich, wenn eine Inkrementalgeber-Karte vorhanden ist (1).
100 bis 5000 1024
[AABB] (AAbb)
1755856 12/2009 77

[1.4 ANTRIEBSDATEN] (drC-)
Verfahren für die Überprüfung des Encoders
Dieses Verfahren ist auf alle Encodertypen anwendbar.
1. Konfigurieren Sie [Typ Motorsteuerung] (Ctt) nicht auf [FVC] (FUC), auch wenn dies die gewünschte Konfiguration ist. Ve rwenden si e
beispielsweise [SVC U] (UUC) für einen Asynchronmotor und [Sync. Motor] (SYn) für einen Synchronmotor.
2. Konfigurieren Sie die Motorparameter entsprechend den Daten des Motortypenschildes
• Asynchronmotor (siehe Seite 69): [Motornennleistung] (nPr), [N ennspannung Mot.] (UnS), [Nennstrom Motor] (nCr), [Nennfreq.
Motor] (FrS), [Motornenndrehzahl] (nSP).
• Synchronmotor (siehe "Parameter des Synchronmotors", Seite 74): [Nennstr.Synchr.Mot] (nCrS), [Nenndrehz syn Mot] (nSPS),
[Polpaar sync. Mot.] (PPnS), [EMK Konst syn Mot] (PHS), [Hauptfeld Indukt.] (LdS), [Streufeld Indukt.] (LqS), [R.Stat eing.synMot]
(rSAS). Die [Strombegrenzung] (CLI) darf den Maximalstrom des Motors nicht überschreiten, da sonst die Gefahr der
Entmagnetisierung besteht.
3. Konfigurieren Sie [Encoder aktiv] (EnU) = [Nein] (nO).
4. Führen Sie eine Motormessung durch.
5. Konfigurieren Sie im Falle eines Inkrementalgebers [Encoder Signa l] (EnS) und [Anzahl Impulse] (PGI), Seite 77, entsprechend dem
verwendeten Encoder.
6. Konfigurieren Sie [Encoder Test] (EnC) = [Ja] (YES).
7. Stellen Sie sicher, dass das Drehen des Motors gefahrlos möglich ist.
8. Fordern Sie eine stabile Motordrehzahl ein ≈ 15 % der Nenndrehzahl während mindestens 3 Sekunden. Verwende n Sie das Menü [1.2-
ÜBERWACHUNG] (SUP-), um das Verhalten zu überwachen.
9. Bei einer Auslösung von [Fehler Encoder] (EnF), wechselt [Encoder Test] (EnC) auf [Nein] (nO).
- Prüfen Sie die Konfiguration der Parameter (siehe 1 bis 4 weiter oben).
- Prüfen Sie den korrekten mechanischen und elektrischen Betrieb des Encoders sowie die Versorgung und den Anschluss.
- Wechseln Sie die Drehrichtung des Motors (Parameter [Phasendrehung] (PHr), Seite 70) oder die Signale des Encoders.
10. Wiederholen Sie dieses Verfahren erneut ab Schritt 5, bis [Encoder Test] (EnC) auf [ausgeführt] (dOnE) wechselt.
11. Konfigurieren Sie erneut [Typ Motorsteuerung] (Ctt), wenn dieser [FVC] (FUC) entsprechen soll.
78 1755856 12/2009

[1.4 ANTRIEBSDATEN] (drC-)
Code Name/Beschreibung Einstellbereich Werkseinstellung
EnC
YES
dOnE
EnU
SEC
rEG
PGr
(1)Der Zugriff auf geberspezifische Parameter ist nur mögli ch, wenn die Encoder-Karte v orhanden ist. Di e verfügbare Aus wahl ist vom Typ
der verwendeten Encoder-Karte abhängig. Auf die Konfiguration des Encoders kann auch über das Menü [1.5 EIN/ AUSGÄNGE] (I/O)
zugegriffen werden.
M [Encoder Test]
Überprüfung der Encoder-Rückführung. Siehe Verfahren auf der vorhergehende n Seite.
Der Parameter ist zugänglich, wenn eine Encoder-Karte vorhanden ist (1).
nO
v [Nicht ausg.] (nO): Überprüfung nicht ausgeführt.
v [Ja] (YES): Aktiviert die Überwachung des Encoders.
v [ausgeführt] (dOnE): Überprüfung erfolgreich ausgeführt.
Das Prüfverfahren kontrolliert Folgendes:
Im Fehlerfall schaltet der Umrichter mit [Fehler Encoder] (EnF) ab.
M [Encoder aktiv]
Der Parameter ist zugänglich, wenn eine Encoder-Karte vorhanden ist (1).
nO
v [Nein] (nO): Funktion nicht aktiv.
v [Sicherheit] (SEC): Der Encoder wird nur für die Überwachung als Drehzahlrückführung verwendet.
v [Regelung] (rEG): Der Encoder wird für die Regelung und für die Überwachung als Drehzahlrückführung
verwendet. Diese Konfiguration erfolgt automatisch, wenn der Umrichter mit geschlossenem Regelkreis
konfiguriert wird ([Typ Motorsteuerung] (Ctt) = [FVC] (FUC)). Wenn [Typ Motorsteuerung] (Ctt) = [SVC U]
(UUC), dann wirkt der Encoder als Drehzahlrückführung und ermöglicht die stat ische Korrekt ur de r Drehzahl .
Bei den anderen Werten von [Typ Motorsteuerung] (Ctt) ist der Zugriff auf diese Konfiguration nicht möglich.
v [Sollwert] (PGr): Der Encoder wird als Sollwert verwen det. Die Wahl ist nur mit einer I nkrementalgeber-Karte
möglich.
- Die Drehrichtung des Encoders / Motors
- Vorhandene Signale (Kontinuität der Verdrahtung)
- Die Anzahl der Impulse / Umdrehungen
[Nicht ausg.] (nO)
[Nein] (nO)
1755856 12/2009 79

[1.4 ANTRIEBSDATEN] (drC-)
Schwinghebelpumpen
[ENA System]
ENA SYSTEM ist ein Regelalgorithmus, der für elektrisch rotierende Maschinen mit Unwucht bestimmt ist.
Zu den Hauptanwendungen zählen Bohrlochkolbenpumpen. Da s Funktionsprinzip erlaubt:
- den Betrieb ohne Bremswiderstand
- die Verminderung mechanischer Beanspruchungen des Schafts
- die Verringerung der Netzstromschwankungen
- die Realisierung von Energieeinsparungen durch Verbesserung des Verhältnisses elektrische Leistung/Förderleistung
[P- Anteil ENA]
Mit dieser Einstellung soll ein Kompromiss erzielt werden - zwischen der realisierten Energieeinsparung (und/oder den Netzstromschwankungen)
und den mechanischen Beanspruchungen, denen der Schaft ausgesetzt ist.
Die Energieeinsparung wird aufgrund der verringerten Stromschwankungen und des höheren Durchsatzes bei der gleichen mittleren
Drehzahl realisiert.
[I-Anteil ENA]
Mittels dieser Einstellung kann die Spannung des Gleichstromzwischenkreises geglättet werden.
Starten Sie die Maschine mit einem s chwachen I- und P-Anteil ( 25 % proportional und 10 % i ntegral), um zu vermeiden, dass bei fehlendem
Bremswiderstand eine Überspannung ausgelöst wird. Prüfen Sie, ob dies e Einstellungen geeignet sind.
Empfehlungen zu den Einstellungen während des Betriebs:
• Um den Bremswiderstand und folglich die Spannungssteigerung auf der Ebene des Gleichstromzwischenkreises zu minimieren:
Zeigen Sie die Maschinengeschwindigkeit über das Grafikterminal an.
Verringern Sie die Verstärkung des I-Anteils, bis die Geschwindigkeit der Maschine abfällt . Wenn Sie diesen Punkt ermittelt haben,
erhöhen Sie die Verstärkung des I-Anteils erneut, bis die Maschinengeschwindigkeit stabil ist.
Prüfen Sie über das Grafikterminal oder ein Oszilloskop, ob die Spannung des Gleichstromzwischenkreises stabil ist.
• Zur Realisierung der Energieeinsparung:
Aufgrund der Tatsache, dass die Proportionalverstärkung progressiv verringert wird, können Sie die Energieeinsparung steigern,
indem Sie den maximalen Wert des Netzstroms verringern, die Drehzahlschwankungen jedoch erhöhen und folglich auch die
mechanische Beanspruchung.
Das Ziel ist, Einstellungen zu ermitteln, die Energieeinsparungen ermöglichen und gleichzeitig die mechanische Beanspruchung
auf
ein Minimum herabsetzen.
Wenn die Proportionalverstärkung verringert wird, muss die Integralverstärkung möglicherweise erneut abgeglichen werden,
um
die Auslösung einer Überspannung zu verhindern.
Hinweis: Wenn die Einstellungen abgeschlossen sind, sollten Sie den korrekten Start der Pumpe prüfen. Ei n unzureichendes Anlauf moment
kann auf die Einstellung einer zu schwachen Verstärkung des I-Anteils ENA zurückzuführen sein.
[Übersetzung]
Diese Einstellung entspricht dem Verhältnis Motordrehzahl vor Getriebe/nach Getriebe. Dieser Parameter dient der Anzeige der mittleren
Drehzahl in Hertz und der Maschinendrehzahl in kundenspezifischen Einheiten auf dem Grafikterminal (Beispiel: Impulse pro Minute).
Für
die Anzeige auf dem Grafikterminal müssen diese Größen im Menü [1.2 ÜBERWACHUNG] (SUP-) gewählt werden.
Einstellungsempfehlungen zur Vermeidung von Störmeldungen des Typs [Überdrehzahl] (SOF)
ENA SYSTEM lässt Drehzahlüberschreitungen zu, die zu Störmeldungen des Typs [Überdrehzahl] (SOF) führen. Um dies zu vermeiden,
sollten die Parameterwerte in angemessener Weise erhöht werden:
• [Max. Ausgangsfreq.] (tFr), Seite 70.
• [Schw. Ü.drehz. Puls] (FqA), Seite 236, wenn die Funktion "Frequenzmesser" konfiguriert ist.
80 1755856 12/2009

[1.4 ANTRIEBSDATEN] (drC-)
Schwinghebelpumpen
Code Name/Beschreibung Einstellbereich Werkseinstellung
EnA
YES
GPE
T
GIE
T
rAP
T
(1)Der Zugriff auf diesen Parameter ist auch über das Menü [1.3 EINSTELLUNGEN] (SEt-) möglich.
T
M [ENA System]
Der Parameter ist zugänglich, wenn [Typ Motorsteuerung] (Ctt) = [SVC U] (UUC), siehe Sei te 71.
nO
v [Nein] (nO): Funktion nicht aktiv.
v [Ja] (YES): Funktion aktiv.
M [P- Anteil ENA]
Parameter aufrufbar, wenn [ENA System] (EnA) = [Ja] (YES).
M [I-Anteil ENA]
Parameter aufrufbar, wenn [ENA System] (EnA) = [Ja] (YES).
M [Übersetzung]
Parameter aufrufbar, wenn [ENA System] (EnA) = [Ja] (YES).
Parameter, der bei Betrieb und im Stillstand geändert werden kann.
(1) 1 bis 9999 250
(1) 0 bis 9999 100
(1) 10,0 bis 999,9 10
[Nein] (nO)
1755856 12/2009 81

[1.4 ANTRIEBSDATEN] (drC-)
VORSICHT
Wenn [Sinus Filter] (OFI) = [Ja] (YES) ist, darf [Typ Motorsteuerung] (Ctt) , Seite 71, nur [U/f Reg 2P] (UF2),
[U/f Reg 5P] (UF5), (oder [SVC U] (UUC) bis zu 45 kW bei ATV71
pppM3X und 75 kW bei ATV71pppN4)
entsprechen, und die [Max. Ausgangsfreq.] (tFr) darf 100 Hz nicht überschreiten.
ACHTUNG
Stellen Sie sicher, dass der Motor diesem Strom standhält, insbesondere dann, wenn es sich um einen
Synchronmotor mit Permanentmagneten handelt, bei dem die Gefahr der Entmagnetisierung besteht.
Bei Nichtbeachtung dieser Vorkehrung können Materialschäden auftreten.
VORSICHT
Wenn bei den Umrichtern ATV71p075N4 bis U40N4 die Filter abgeklemmt sind, darf die Taktfrequenz des
Umrichters 4 kHz nicht überschreiten.
Bei Nichtbeachtung dieser Vorkehrung können Materialschäden auftreten.
Code Name/Beschreibung Einstellbereich Werkseinstellung
OFI
SFr
T
nO
YES
M [Sinusfilter]
[Nein] (nO)
v [Nein] (nO): Kein Sinusfilter.
v [Ja] (YES): Verwendung eines Sinusfilters, um Überspannungen des Motors einz uschränken und Kriechstrom
gegen Erde herabzusetzen.
Der [Sinus Filter] (OFI) wird bei den folgenden Umrichtertypen auf [Nein] (nO) forciert: ATV71p037M3,
ATV71
p075N4 und alle ATV71ppppY.
Hinweis: Die Einstellungen von [Strombegrenzung] (CLI) und [Wert 2. Strombegr.] (CL2), Seite 61,
müssen nach der Konfiguration von [Sinus Filter] (OFI) = [Ja] (YES) und [Typ Motorsteuerung] (Ctt),
Seite
71 = [U/f Reg 2P] (UF2) oder [U/f Reg 5P] (UF5) ausgeführt werden, da diese Konfiguration bei
bestimmten Modellen zu einer Werkseinstellung mit verminderter Strombegrenzung (1,36 In) führt.
Bei Nichtbeachtung dieser Vorkehrung können Materialschäden auftreten.
M [Taktfrequenz]
Einstellung der Taktfrequenz.
Einstellbereich: Er kann zwischen 1 und 16 kHz schwanken; die Minimal- und Maximalwerte sowie die
Werkseinstellung können jedoch entsprechend dem Umrichtertyp (ATV71H oder W), der Leistung (Leistung
und Spannung) und der Konfiguration der Parameter [Sinus Filter] (OFI) und [Begr Überspg Motor] (SUL) ,
Seite
83, begrenzt sein.
Liegt der Wert unter 2 kHz, dann sind [Strombegrenzung] (CLI) und [Wert 2. Strombegr.] (CL2), Seite 61,
auf 1,36 In begrenzt.
Einstellung während des Betriebs:
- Liegt der Ausgangswert unter 2 kHz, dann sind nicht mehr als 1,9 kHz bei Betrieb möglich.
- Ist der Ausgangswert höher oder gleich 2 kHz, dann sind nicht mehr als 2 kHz bei Betrieb möglich.
Einstellung im Stillstand: Keine Bedingungen.
Hinweis: Bei übermäßiger Erwärmung verringert der Umrichter automatisch die Taktfrequenz und
stellt diese bei normaler Temperatur wieder her.
Hinweis: Wenn [Typ Motorsteuerung] (Ctt), Seite 71 = [FVC] (FUC), sollte die Taktfrequenz nicht auf
einen Wert unter 2 kHz eingestellt werden, da dies zu einer Instabil ität der Frequenz führen kann.
(1) Je nach Baugröße Je nach Baugröße
CLI
T
(1)Der Zugriff auf diesen Parameter ist auch über das Menü [1.3 EINSTELLUNGEN] (SEt-) möglich.
(2)In entspricht dem in der Installationsanleitung und auf dem Typenschild des Umrichters angegebenen Nennstrom des Umrichters.
T
82 1755856 12/2009
M [Strombegrenzung]
Ermöglicht die Strombegrenzung des Motors.
Der Einstellbereich ist auf 1,36 In begrenzt, wenn [Taktfrequenz] (SFr) unter 2 kHz liegt.
Hinweis: Erfolgt eine Einstellung unter 0,25 In, dann besteht die Gefahr einer Verriegelung mit der
Störung [Verlust Motorphase] (OPF), wenn diese bestätigt wird (siehe Seite 225). Liegt sie unterhalb
des Leerlaufstroms des Motors, spricht die Begrenzung nicht mehr an..
Parameter, der bei Betrieb und im Stillstand geändert werden kann.
(1) 0 bis 1,65 In (2) 1,5 In (2)

[1.4 ANTRIEBSDATEN] (drC-)
Code Name/Beschreibung Einstellbereich Werkseinstellung
nrd
SUL
SOP
nO
YES
nO
YES
M [Geräuscharm]
Je nach Baugröße
v [Nein] (nO): Feste Frequenz. Werkseinstellung ab der Baugrößen ATV71HD55M3X, ATV71HD90N4 und
ATV71HC11Y.
v [Ja] (YES): Frequenz mit zufallsgesteuerter Modulation. Werkseinstellung bis zu den Baugrößen
ATV71HD45M3X, ATV71HD75N4 und ATV71HD90Y.
Die zufallsgesteuerte Frequenzmodulation verhindert eventue lle Störgeräusche und Resonanzen, die bei einer
festen Frequenz auftreten könnten.
M [Begr Überspg Motor]
Diese Funktion grenzt Motorüberspannungen ein. Sie wird in folgenden Fällen verwendet:
- Motoren nach NEMA-Spezifikation
- Japanische Motoren
- Spindelmotoren
- Rückspulmotoren
[Nein] (nO)
v [Nein] (nO): Funktion nicht aktiv.
v [Ja] (YES): Funktion aktiv
Dieser Parameter wird auf [Nein] (nO) forciert, wenn [Sinus Filter] (OFI), vorherige Seite = [Ja] (YES).
Dieser Parameter kann = [Nein] (nO) bleiben bei 230-/400-V-Motoren, die mit 230 V verwendet werden, oder
wenn die Kabellänge zwischen dem Umrichter und dem Motor die folgenden Längen nicht überschreitet:
- 4 m mit ungeschirmten Kabeln
- 10 m mit geschirmten Kabeln
M [Opt. Begr.Motorspg.]
Parameter zur Optimierung transienter Überspannungen an den Motorklemmen, die zugänglich sind, wenn
[Lim Überspg Motor.] (SUL) = [Ja] (YES).
Einstellung auf 6, 8, oder 10 μs, gemäß nachfolgender Tabelle.
10 μs
Der Wert des Parameters „SOP“ entspricht der Zeit für die Dämpfung des verwendeten Kabels. Er wird definiert, um zu verhindern, dass
sich Reflexionen von Spannungswellen aufgrund großer Kabellängen überlagern. Er begrenzt die Überschreitung auf das Doppelte der
Nennspannung des DC-Busses.
Die Tabellen auf der folgenden Seite zeigen Entsprechungsbei spiele für den Parameter „SOP“ und die Kabellänge zwischen dem Umrichter
und dem Motor. Bei größeren Längen ist ein Sinusfilter oder ein du/dt-Schutzfilter zu verwenden.
• Bei parallel geschalteten Motoren beträgt die zu berücksich tigende Kabellänge die Summe aller Längen . Vergleichen Sie die angegebene
Länge in der entsprechenden Zeile für die Motorleistung mit der der Gesamtl eistung und verwenden Sie die klei nste Länge. Beispiel:
Zwei 7,5-kW-Motoren - verwenden Sie die Längen der Zeile 15 kW der Tabelle, die kleiner als die jenigen der Zeile 7,5 kW sind; teilen
Sie durch die Anzahl der Motoren, um die Länge pro Motor zu erh alten (mit nicht geschirmtem „GORSE“-Kabel und SOP = 6 ergibt
sich max. 40/2 = 20 m für jeden 7,5-kW-Motor).
In besonderen Fällen (beispielsweise bei anderen Kabeltypen, unterschiedlichen Leistungen bei Parallelbetrieb, unterschiedlichen
Kabellängen bei Parallelbetrieb usw.) ist es empfehlenswert, die an den Motorklemmen erzielten Überspannungswerte mit einem
Oszilloskop zu prüfen.
Es ist nicht empfehlenswert, den Wert von SOP unnötig zu erhöhen, damit die gesamte Umrichterleistung erhalten bleibt.
1755856 12/2009 83

[1.4 ANTRIEBSDATEN] (drC-)
Tabelle der Entsprechungen Parameter SOP - Kabellänge für 400-V-Netze
Altivar 71 Motor Kabelquerschnitt Ma x im a le Kab e ll än ge in M ete rn
Bestellreferenz Spannungsver-
ATV71H075N4 0,75 1 1,5 14 100 m 70 m 45 m 105 m 85 m 65 m
ATV71HU15N4 1,5 2 1,5 14 100 m 70 m 45 m 105 m 85 m 65 m
ATV71HU22N4 2,2 3 1,5 14 110 m 65 m 45 m 105 m 85 m 65 m
ATV71HU30N4 3 - 1,5 14 110 m 65 m 45 m 105 m 85 m 65 m
ATV71HU40N4 4 5 1,5 14 110 m 65 m 45 m 105 m 85 m 65 m
ATV71HU55N4 5,5 7,5 2,5 14 120 m 65 m 45 m 105 m 85 m 65 m
ATV71HU75N4 7,5 10 2,5 14 120 m 65 m 45 m 105 m 85 m 65 m
ATV71HD11N4 11 15 6 10 115 m 60 m 45 m 100 m 75 m 55 m
ATV71HD15N4 15 20 10 8 105 m 60 m 40 m 100 m 70 m 50 m
ATV71HD18N4 18,5 25 10 8 115 m 60 m 35 m 150 m 75 m 50 m
ATV71HD22N4 22 30 16 6 150 m 60 m 40 m 150 m 70 m 50 m
ATV71HD30N4 30 40 25 4 150 m 55 m 35 m 150 m 70 m 50 m
ATV71HD37N4 37 50 35 5 200 m 65 m 50 m 150 m 70 m 50 m
ATV71HD45N4 45 60 50 0 200 m 55 m 30 m 150 m 60 m 40 m
ATV71HD55N4 55 75 70 2/0 200 m 50 m 25 m 150 m 55 m 30 m
ATV71HD75N4 75 100 95 4/0 200 m 45 m 25 m 150 m 55 m 30 m
sorgung
kW HP in mm
2
AWG SOP = 10 SOP = 8 SOP = 6 SOP = 10 SOP = 8 SOP = 6
Kabel „GORSE“, ungeschirmt
Typ H07 RN-F 4Gxx
Kabel „GORSE“, geschirmt
Typ GVCSTV-LS/LH
Altivar 71 Motor Kabelquerschnitt Ma x im a le Kab e ll än ge in M ete rn
Bestellreferenz Spannungsver-
ATV71H075N4 0,75 1 1,5 14 50 m 40 m 30 m
ATV71HU15N4 1,5 2 1,5 14 50 m 40 m 30 m
ATV71HU22N4 2,2 3 1,5 14 50 m 40 m 30 m
ATV71HU30N4 3 - 1,5 14 50 m 40 m 30 m
ATV71HU40N4 4 5 1,5 14 50 m 40 m 30 m
ATV71HU55N4 5,5 7,5 2,5 14 50 m 40 m 30 m
ATV71HU75N4 7,5 10 2,5 14 50 m 40 m 30 m
ATV71HD11N4 11 15 6 10 50 m 40 m 30 m
ATV71HD15N4 15 20 10 8 50 m 40 m 30 m
ATV71HD18N4 18,5 25 10 8 50 m 40 m 30 m
ATV71HD22N4 22 30 16 6 75 m 40 m 25 m
ATV71HD30N4 30 40 25 4 75 m 40 m 25 m
ATV71HD37N4 37 50 35 5 75 m 40 m 25 m
ATV71HD45N4 45 60 50 0 75 m 40 m 25 m
ATV71HD55N4 55 75 70 2/0 75 m 30 m 15 m
ATV71HD75N4 75 100 95 4/0 75 m 30 m 15 m
Bei 230-/400-V-Motoren, die mit 230 V verwendet werden, kann der Parameter [Begr Überspg Motor] (SUL) = [Nein] (nO) bleiben.
sorgung
kW HP in mm
2
AWG SOP = 10 SOP = 8 SOP = 6 SOP = 10 SOP = 8 SOP = 6
Kabel „BELDEN“, geschirmt
Typ 2950x
Kabel „PROTOFLEX“, geschirmt
Typ EMV 2YSLCY-J
84 1755856 12/2009

[1.4 ANTRIEBSDATEN] (drC-)
LbC
LbC
Moment
Nennmoment
Nennmoment
Frequenz
0
Code Name/Beschreibung Einstellbereich Werkseinstellung
Ubr
T
bbA
nO
YES
M [Schaltpkt Chopper]
Spannungsschwelle des DC-Busses. Bei Überschreitung dieses Schwellwerts wird der Bremstransistor aktiv
und diese Spannung begrenzt.
ATV71ppppM3p: Werkseinstellung 395 V
ATV71ppppN4: Werkseinstellung 785 V
ATV71ppppS6x: Werkseinstellung 980 V
ATV71ppppY: Werkseinstellung 1127 V oder 1080 V, je nach Baugröße.
Der Einstellbereich hängt von der Spannungsleistung des Umrichters ab sowie vom Parameter
[Netzspannung] (UrES), Seite
229.
M [Regel. Bremsleist.]
v [Nein] (nO): Funktion nicht aktiv.
v [Ja] (YES): Funktion aktiv. Ist für Umrichter zu verwenden, die parallel über den DC-Bus verbunden sind.
Mit
ihr kann die Lastverteilung der Bremsleistung zwischen den Umrichtern abgeglichen werden. Der
Parameter [Schaltpkt Chopper] (Ubr) muss bei den verschiedenen Umrichtern auf den gleichen Wert
eingestellt werden.
Der Wert [Ja] (YES) ist möglich, wenn [Anp. Auslauframpe] (brA) = [Nein] (nO) (siehe Seite 138).
Je nach Spannung
des Umrichters
[Nein] (nO)
LbA
LbC
T
nO
YES
M [Lastverteilung]
Wenn zwei Motoren mechanisch miteinander verbunden sind und zwangsläufig mit der gleichen Drehzahl
laufen und wenn beide durch einen Umrichter geregelt werden, kann mit dieser Funktion eine bessere
Aufteilung des Moments zwischen den beiden Motoren erreicht werden. Die Funktion liefert hierfür eine
Drehzahländerung entsprechend dem Drehmoment.
v [Nein] (nO): Funktion nicht aktiv.
v [Ja] (YES): Funktion aktiv.
Der Parameter ist nur zugänglich, wenn [Typ Motorsteuerung] (Ctt), Seite 71, nic h t [U/f Reg 2P] (UF2) ode r [U/
f Reg 5P] (UF5) entspricht.
M [Korr Lastverteilung]
Korrektur des Nennwerts in Hertz.
Parameter aufrufbar, wenn [Lastverteilung] (LbA) = [Ja] (YES).
[Nein] (nO)
(1) 0 bis 1000 Hz 0
(1)Der Zugriff auf diesen Parameter ist auch über das Menü [1.3 EINSTELLUNGEN] (SEt-) möglich.
1755856 12/2009 85
T
Parameter, der bei Betrieb und im Stillstand geändert werden kann.

[1.4 ANTRIEBSDATEN] (drC-)
+
-
Sollwert
Drehzahl
Rampe
Drehzahlsteuerung
Lastverteilung
K
Filter
Ref. Drehmoment
LBC
LBC1
LBC2
LBC3
LBF
K1
Drehzahl
LBC1 LBC2
1
K2
Moment
LBC3
LBC3
Nennmoment
(1 + LBC3)
LBC
LBC
Lastverteilung, auf Expertenebene zugängliche Parameter
Prinzip
Der Lastverteilungsfaktor K ist vom Moment und von der Drehzahl abhängig, mit zwei Faktoren K1 und K2 (K = K1 x K2).
86 1755856 12/2009

[1.4 ANTRIEBSDATEN] (drC-)
Code Name/Beschreibung Einstellbereich Werkseinstellung
LbC1
T
LbC2
T
LbC3
T
LbF
T
T
M [Korr unterer Wert]
Parameter aufrufbar, wenn [Lastverteilung] (LbA) = [Ja] (YES).
Minimale Drehzahl zur Korrektur der Last in Hertz. Unterhalb dieses Schwellwerts wird keine Korrektur
angewandt. Wird zur Verhinderung der Korrektur bei sehr niedriger Drehzahl verwendet, wenn diese die
Drehung des Motors behindert.
M [Korr oberer Wert]
Parameter aufrufbar, wenn [Lastverteilung] (LbA) = [Ja] (YES).
Frequenzschwellwert in Hertz, die darüber hinausgehende Lastkorrektur ist maximal.
M [Drehmoment Offset]
Parameter aufrufbar, wenn [Lastverteilung] (LbA) = [Ja] (YES).
Minimales Moment zur Korrektur der Last, in Prozent des Nennmoment s. Unte rhalb dieses Schwellwerts wird
keine Korrektur angewandt. Wird verwendet, um Instabilität zu vermeiden, wenn die Richtung des Moments
veränderlich ist.
M [Filter Lastausgleich]
Parameter aufrufbar, wenn [Lastverteilung] (LbA) = [Ja] (YES).
Zeitkonstante (Filter) für die Korrektur, in Mill isekunden. Wird bei elastischer mechanischer Ankupplung
verwendet, um Instabilitäten zu vermeiden.
Parameter, der bei Betrieb und im Stillstand geändert werden kann.
0 bis 999,9 Hz 0
[Korr unterer Wert]
(LbC1) + 0,1
bis 1000 Hz
0 bis 300 % 0 %
100 ms bis 20 s 100 ms
0,1
1755856 12/2009 87

[1.5 EIN/ AUSGÄNGE] (I-O-)
RDY Term +0,00 Hz 0 A
HAUPTMENÜ
1 UMRICHTER MENÜ
2 ZUGRIFFSEBENE
3 LADEN/SPEICHERN ALS
4 ZUGRIFFSCODE
5 SPRACHE
Code Quick
ENT
RDY Term +0,00 Hz 0 A
1 UMRICHTER MENÜ
1.1 SCHNELLSTART MENÜ
1.2 ÜBERWACHUNG
1.3 EINSTELLUNGEN
1.4 ANTRIEBSDATEN
1.5 EIN/ AUSGÄNGE
Code << >> Quick
ENT
RUN Term +50,00 Hz 80 A
1.5 EIN/ AUSGÄNGE
2/3-Drahtst.
Typ 2-Drahtst.
Linkslauf
KONFIGURATION LI1
KONFIGURATION LIx
Code << >> Quick
XXX
CtL-
SIM-
I-O-
ESC
ESC
ESC
ESC
ENT
ENT
ESC
LAC-
Anzeige des Zustands des Umrichters
EIN/ AUSGÄNGE
Einschalten
Mit Grafikterminal:
Mit integriertem Terminal:
88 1755856 12/2009

[1.5 EIN/ AUSGÄNGE] (I-O-)
+24 LI1 LIx
ATV 71
+24 LI1 LI2 LIx
ATV 71
ACHTUNG
UNERWARTETER BETRIEB DES GERÄTS
Zur Änderung der Belegung von [2/3-Drahtst.] (tCC) muss die Taste „ENT“ gedrückt werden (2 s).
Sie bewirkt die Rückkehr zur Werkseinstellung der Funktionen [Typ 2-Drahtst] (tCt) und [Linkslauf]
(rrS) weiter unten sowie aller Funktionen, die sich auf Logik- und Analogeingänge beziehen.
Gleichzeitig wird auch die Rückkehr zur gewählten Makrokonfiguration bewirkt, wenn diese
benutzerspezifisch angepasst wurde (Verlust der Anpassungen).
Dieser Parameter sollte unbedingt vor der Konfiguration der Menüs [1.6 STEUERUNG] (CtL-) und
[1.7 APPLIKATIONS-FKT.] (FUn-) konfiguri ert werden.
Stellen Sie sicher, dass diese Änderung mit dem verwendeten Verdrahtungsschema kompatibel ist.
Die Nichtbeachtung dieser Vorkehrung kann zum Tod oder schwerwiegenden Verletzungen
führen.
Die Parameter des Menüs [1.5 EIN/ AUSGÄNGE] (I-O-) sind nur im Stillstand, ohne Fahrbefehl änderbar.
Code Name/Beschreibung Einstellbereich Werkseinstellung
tCC
M [2/3-Drahtst.]
2C
3C
v [2Draht-Stg] (2C)
v [3Draht-Stg] (2C)
[2Draht-Stg] (2C)
2-Draht-Steuerung: Das Ein- oder Ausschalten wird über den Zu stand (0 oder 1) oder die Flanke (0 bis 1 oder
1 bis 0) des Eingangs gesteuert.
Beispiel für eine Verdrahtung als „Source“:
LI1: Rechtslauf
LIx: Linkslauf
3-Draht-Steuerung (flankengesteuert): Ein Impuls „Rechtslauf“ oder „Linkslauf“ reicht aus, um das Anlaufen
des Motors zu steuern; ein Impuls „Stopp“ reicht aus, um das Anhalten des Motors zu steuern.
Beispiel für eine Verdrahtung als „Source“:
LI1: Stopp
LI2: Rechtslauf
LIx: Linkslauf
1755856 12/2009 89
tCt
LEL
trn
PFO
rrS
LI1
C101
Cd00
M [Typ 2-Drahtst.]
v [Niveau] (LEL): Der Zustand 0 oder 1 wird für den Fahrbefehl (1) oder den Haltebefehl (0) verwendet.
v [Flankengest] (trn): Für den Fahrbefehl ist ein Zustandswechsel (Übergang oder Flanke) erforderlich;
dadurch lässt sich ein unbeabsichtigter Wiederanlauf nach einer Unterbrechung der Spannungsversorgung
vermeiden.
v [Prio Rechts] (PFO): Der Fahr- oder Haltebefehl wird durch di e Zust ände 0 o der 1 gesteue rt . Der Ei nga ng
„Rechtslauf“ hat jedoch immer den Vorrang gegenüber dem Eingang „Linkslauf“.
M [Linkslauf]
nO
v [Nein] (nO): Nicht belegt
v [LI1] (LI1) bis [LI6] (LI6)
-
-
v [LI7] (LI7) bis [LI10] (LI10): Wenn Karte Logikein-/ausgänge VW3A3201 vorhanden
v [LI11] (LI11) bis [LI14] (LI14): Wenn Karte Erweiterte E/A-Erweiterung VW3A3202 vorhanden
v [C101] (C101) bis [C115] (C115): Mit integriertem Modbus und [Profil I/O] (IO)
-
-
-
v [C201] (C201) bis [C215] (C215): Mit integriertem CANopen und [Profil I/O] (IO)
v [C301] (C301) bis [C315] (C315): Mit einer Kommunikationskarte und [Profil I/O] (IO)
v [C401] (C401) bis [C415] (C415): Mit einer Karte „Controller Inside“ und [Profil I/O] (IO)
v [CD00] (Cd00) bis [CD13] (Cd13): Mit [Profil I/O] (IO) umschaltbar, mit Logikeingängen
-
v [CD14] (Cd14) bis [CD15] (Cd15): Mit Profil [Profil I/O] (IO) umschaltbar, ohne Logikeingänge
Zuordnung des Befehls Linkslauf.
[Flankengest] (trn)
[LI2] (LI2)

[1.5 EIN/ AUSGÄNGE] (I-O-)
ACHTUNG
UNERWARTETER BETRIEB DES GERÄTS
Vergewissern Sie sich, dass die eingestellte Verzögerung keine Gefahr darstellt und keinen
unbeabsichtigten Betrieb verursacht.
Entsprechend der Verzögerungswerte der verschiedenen Log ikeingänge ändert sich ggf. die Reihenfolge
der Erfassung dieser Eingänge, was zu einem unvorhergesehenen Betrieb führen kann.
Die Nichtbeachtung dieser Vorkehrung kann zum Tod oder schwerwiegenden Verletzungen
führen.
Code Name/Beschreibung Einstellbereich Werkseinstellung
L1-
L--
L1A
L1d
b [KONFIGURATION LI1]
M [Zuord. LI1]
Der Parameter kann nur gelesen werden und ist nicht konfigurierbar.
Er zeigt alle Funktionen an, die dem Eingang LI1 zugeordnet sind, und dient der Überprüfung von
Mehrfachzuordnungen.
M [Einsch. Verz. LI1]
Mit diesem Parameter kann der Wechsel des Logikeingangs in den Zustand 1 mit einer von 0 bis 200 ms
einstellbaren Verzögerung erfasst werden, um ev entuelle Störungen zu filtern. Der Wech sel in den Zustand
0 wird ohne Verzögerung erfasst.
b [KONFIGURATION LIx]
0 bis 200 ms 0
Alle auf dem Umrichter vorhandenen Logikei ngänge werden wie das obige Beispie l LI1 verarbeitet (j e nach
vorhandener Optionskarte bis LI6, LI10 oder LI14).
90 1755856 12/2009

[1.5 EIN/ AUSGÄNGE] (I-O-)
Sollwert
100 %
0 %
[min. Wert]
(CrLx oder
ULx oder PIL)
[max. Wert]
(CrHx oder
UHx oder PFr)
20 mA oder
10 V oder
30,00 kHz
Sollwert
100 %
0 %
[min. Wert]
(CrLx oder
ULx oder PIL)
[max. Wert]
(CrHx oder
UHx oder PFr)
Strom-,
Spannungs-
oder
Frequenzeingang
Strom-,
Spannungs-
oder Frequenzeingang
20 mA oder
10 V oder
30,00 kHz
Sollwert
100 %
0 %
[min. Wert]
(PIL)
[max. Wert]
(PFr)
30,00
kHz
Frequenzeingang
-30,00
kHz
Sollwert
100 %
0 %
[min. Wert] [max. Wert]
Bereich 0 %
V 100 %
Sollwert
100 %
0 %
[min. Wert]
[max. Wert]
Strom- oder
Spannungs-
eingang
Strom- oder
Spannungs-
eingang
- 100 %
Bereich -100 %
V +100 %
20 mA
oder 10 V
20 mA
oder 10 V
Konfiguration der Analogeingänge und des Eingangs „Pulse Input“
Die Minimal- und Maximalwerte der Eingänge (in Volt, mA usw.) werden in Prozent angegeben, um die Sollwerte an die Anwendung
anzupassen.
Minimal- und Maximalwerte der Eingänge:
Der Minimalwert entspricht einem Sollwert von 0 % und der Maximalwert einem Sollwert von 100 %. Der Minimalwert kann größer als der
Maximalwert sein:
Bei den bidirektionalen +/- Eingängen bezieht si ch der Minimal- und der Maximalwert auf den Absolutwert; beispielsweise +/- 2 auf 8 V.
Negativer Minimalwert des Eingangs „Pulse Input“:
Bereich (Ausgangswerte): Nur für Analogeingänge
Mit diesem Parameter kann ein Sollwertbereich von [0 % V 100 %] oder [-100 % V +100 %] konfiguriert werden, um einen bidirektionalen
Ausgang mittels eines unidirektionalen Eingangs zu erzielen.
1755856 12/2009 91

[1.5 EIN/ AUSGÄNGE] (I-O-)
Frequenz
Sollwert
LSP
-100 %
+100 %
HSP
LSP
HSP
0 %
Frequenz
Sollwert
LSP
-100 %
+100 %
HSP
LSP
HSP
Frequenz
Sollwert
LSP
-100 %
+100 %
HSP
LSP
HSP
0
Frequenz
Sollwert
LSP
-100 %
+100 %
HSP
LSP
HSP
0%
Code Name/Beschreibung Einstellbereich Werkseinstellung
bSP
bSd
bLS
M [Art der Referenz]
v [Standard] (bSd)
v [Begr LSP] (bLS)
[Standard] (bSd)
Bei Sollwert Null ist die Frequenz = LSP
Bei Sollwert = 0 mit LSP ist die Frequenz = LSP
bnS
bnS0
v [Unterdr LSP] (bnS)
v [Totband 0] (bnS0)
Bei Sollwert = 0 mit LSP ist die Frequenz = 0
Diese Funktionsweise entspricht dem
[Standard] (bSd), außer dass bei Sollwert Null
die Frequenz in den folgenden Fällen = 0 ist:
• Das Signal ist niedriger als der [min. Wert],
der
größer als 0 ist (Beispiel 1 V an einem
Eingang 2
• Das Signal ist höher als der [min. Wert],
der
an einem Eingang 10
In den Fällen, in denen der Eingangsbereich
„bidirektional“ konfiguriert ist, ist die Funktionsweise
identisch mit dem [Standard] (bSd).
- 10 V).
höher als der [max. Wert] ist (Beispiel 11 V
-0 V).
92 1755856 12/2009
Dieser Parameter definiert d ie Erfassung des Drehzahlsoll werts nur bei den Analogeing ängen und dem
Frequenzeingang „Pulse Input“. Im Falle des PI D-Reglers handelt es sich um d en Ausgangssoll wert des PID.
Die Grenzwerte werden über die Parameter [Kleine Frequenz] (LSP) und [Große Frequenz] (HSP), Seite 44, geliefert.

[1.5 EIN/ AUSGÄNGE] (I-O-)
Sollwert
100 %
0 %
[min. Wert]
(0 %)
[Pkt X
Verschieb]
[max. Wert]
(100 %)
Strom- oder
Spannungs-
eingang
[Pkt Y
Verschieb]
20 mA
oder 10 V
Sollwert
100 %
0 %
[min. Wert]
(- 100 %)
[Pkt X
Verschieb]
[max. Wert]
(100 %)
Strom- oder
Spannungs-
eingang
[Pkt Y
Verschieb]
- [Pkt Y
Verschieb]
- 100 %
- [Pkt x
Verschieb]
0 %
20 mA
oder 10 V
Entlinearisierung: Nur für Analogeingänge
Durch die Konfiguration eines Zwischenpunktes auf der Ein-/Ausgan gs-Kennl inie des Eing angs lä sst sic h die Linea risierung des Ei ngangs
aufheben:
Für Bereich 0 % V 100 %
Hinweis: Bei [Pkt X Verschieb] entspricht 0 % dem [min. Wert] und 100 % dem [max. Wert].
Für Bereich -100 % V +100 %
1755856 12/2009 93

[1.5 EIN/ AUSGÄNGE] (I-O-)
Code Name/Beschreibung Einstellbereich Werkseinstellung
AI1-
AI1A
AI1t
UIL1
UIH1
AI1F
AI1E
AI1S
10U
n10U
b [KONFIGURATION AI1]
M [Zuordnung AI1]
Der Parameter kann nur gelesen werden und ist nicht konfigurierbar.
Er zeigt alle Funktionen an, die dem Eingang AI1 zugeordnet sind, sodass beispielsweise geprüft werden
kann, ob Kompatibilitätsprobleme bestehen.
M [Typ AI1]
v [Spannung] (10U): + Spannungseingang (die Negativwerte werden gl eich Null angesehen: der Eing ang
ist unidirektional).
v [+/- Spg] (10U): +/- Spannungseingang (der Eingang ist bidirektional).
M [min. Wert AI1]
M [max. Wert AI1]
M [Filter Eingang AI1]
Filterung eventueller Störungen.
M [Pkt X Verschieb AI1]
Koordinate des Entlinearisierungspunkts am Eingang.
• 0 % entspricht [min. Wert] (UIL1).
• 100 % entspricht [max. Wert] (UIH1).
M [Pkt Y Verschieb AI1]
Koordinate des Entlinearisierungspunkts am Ausgang (Frequenzsollwert).
[Spannung] (10U)
0 bis 10,0 V 0 V
0 bis 10,0 V 10,0 V
0 bis 10,00 s 0 s
0 bis 100 % 0 %
0 bis 100 % 0 %
94 1755856 12/2009

[1.5 EIN/ AUSGÄNGE] (I-O-)
[max. Wert] + [min. Wert]
2
Code Name/Beschreibung Einstellbereich Werkseinstellung
AI2-
AI2A
AI2t
CrL2
UIL2
CrH2
UIH2
AI2F
AI2L
AI2E
10U
0A
POS
nEG
b [KONFIGURATION AI2]
M [Zuordnung AI2]
Der Parameter kann nur gelesen werden und ist nicht konfigurierbar.
Er zeigt alle Funktionen an, die dem Eingang AI2 zugeordnet sind, sodass beispielsweise geprüft werden
kann, ob Kompatibilitätsprobleme bestehen.
M [Typ AI2]
v [Spannung] (10U): Spannungseingang
v [Strom] (0 A): Stromeingang
M [min. Wert AI2]
Parameter zugänglich, wenn [Typ AI2] (AI2t) = [Strom] (0 A).
M [min. Wert AI2]
Parameter zugänglich, wenn [Typ AI2] (AI2t) = [Spannung] (10U).
M [max. Wert AI2]
Parameter zugänglich, wenn [Typ AI2] (AI2t) = [Strom] (0 A).
M [max. Wert AI2]
Parameter zugänglich, wenn [Typ AI2] (AI2t) = [Spannung] (10U).
M [Filter Eingang AI2]
Filterung eventueller Störungen.
M [Bereich AI2]
v [0 - 100%] (POS): Unidirektionaler Eingang
v [+/- 100%] (nEG): Bidirektionaler Eingang
Beispiel: An einem Eingang 0 / 10 V
- entspricht 0 V dem Sollwert -100 %.
- entspricht 5 V dem Sollwert 0 %.
- entspricht 10 V dem Sollwert +100 %.
M [Pkt X Verschieb AI2]
Koordinate des Entlinearisierungspunkts am Eingang.
• 0 % entspricht [min. Wert], wenn der Bereich 0 V 100 % ist.
[Strom] (0 A)
0 bis 20,0 mA 0 mA
0 bis 10,0 V 0 V
0 bis 20,0 mA 20,0 mA
0 bis 10,0 V 10,0 V
0 bis 10,00 s 0 s
[0 - 100%] (POS)
0 bis 100 % 0 %
• 0 % entspricht wenn der Bereich -100 % V +100 % ist.
• 100 % entspricht [max. Wert].
AI2S
1755856 12/2009 95
M [Pkt Y Verschieb AI2]
Koordinate des Entlinearisierungspunkts am Ausgang (Frequenzsollwert).
0 bis 100 % 0 %

[1.5 EIN/ AUSGÄNGE] (I-O-)
[max. Wert] (CrH3) + [min. Wert] (CrL3)
2
Code Name/Beschreibung Einstellbereich Werkseinstellung
AI3-
AI3A
AI3t
CrL3
CrH3
AI3F
AI3L
AI3E
0A
POS
nEG
b [KONFIGURATION AI3]
Der Zugriff ist möglich, wenn die Optionskarte VW3A3202 vorhanden ist.
M [Zuordnung AI3]
Der Parameter kann nur gelesen werden und ist nicht konfigurierbar.
Er zeigt alle Funktionen an, die dem Eingang AI3 zugeordnet sind, sodass beispielsweise geprüft werden
kann, ob Kompatibilitätsprobleme bestehen.
M [Typ AI3]
Der Parameter kann nur gelesen werden und ist nicht konfigurierbar.
v [Strom] (0 A): Stromeingang
M [min. Wert AI3]
M [max. Wert AI3]
M [Filter Eingang AI3]
Filterung eventueller Störungen.
M [Bereich AI3]
v [0 - 100%] (POS): Unidirektionaler Eingang
v [+/- 100%] (nEG): Bidirektionaler Eingang
Beispiel: An einem Eingang 4 - 20 mA
- entspricht 4 mA dem Sollwert -100 %.
- entspricht 12 mA dem Sollwert 0 %.
- entspricht 20 mA dem Sollwert +100 %.
Da AI3 physisch ein bidirektionaler Eingang ist, darf die Konfiguration [+/-100%] (nEG) nur verwendet
werden, wenn das angelegte Signal unidirektional ist. Ein bidirektionales Signal darf nicht gleichzeitig mit
einer bidirektionalen Konfiguration verwendet werden.
M [Pkt X Verschieb AI3]
Koordinate des Entlinearisierungspunkts am Eingang.
• 0 % entspricht [min. Wert] (CrL3), wenn der Bereich 0 V 100 % ist.
[Strom] (0 A)
0 bis 20,0 mA 0 mA
0 bis 20,0 mA 20,0 mA
0 bis 10,00 s 0 s
[0 - 100%] (POS)
0 bis 100 % 0 %
AI3S
96 1755856 12/2009
M [Pkt Y Verschieb AI3]
• 0 % entspricht wenn der Bereich -100 % V +100 % ist.
• 100 % entspricht [max. Wert] ( CrH3).
0 bis 100 % 0 %
Koordinate des Entlinearisierungspunkts am Ausgang (Frequenzsollwert).

[1.5 EIN/ AUSGÄNGE] (I-O-)
[max. Wert] + [min. Wert]
2
Code Name/Beschreibung Einstellbereich Werkseinstellung
AI4-
AI4A
AI4t
CrL4
UIL4
CrH4
UIH4
AI4F
AI4L
AI4E
10U
0A
POS
nEG
b [KONFIGURATION AI4]
Der Zugriff ist möglich, wenn die Optionskarte VW3A3202 vorhanden ist.
M [Zuordnung AI4]
Der Parameter kann nur gelesen werden und ist nicht konfigurierbar.
Er zeigt alle Funktionen an, die dem Eingang AI4 zugeordnet sind, sodass beispielsweise geprüft werden
kann, ob Kompatibilitätsprobleme bestehen.
M [Typ AI4]
v [Spannung] (10U): Spannungseingang
v [Strom] (0 A): Stromeingang
M [Min. Wert AI4]
Parameter zugänglich, wenn [Typ AI4] (AI4t) = [Strom] (0 A).
M [Min. Wert AI4]
Parameter zugänglich, wenn [Typ AI4] (AI4t) = [Spannung] (10U).
M [Max. Wert AI4]
Parameter zugänglich, wenn [Typ AI4] (AI4t) = [Strom] (0 A).
M [max. Wert AI4]
Parameter zugänglich, wenn [Typ AI4] (AI4t) = [Spannung] (10U).
M [Filter Eingang AI1]
Filterung eventueller Störungen.
M [Bereich AI4]
v [0 - 100%] (POS): Unidirektionaler Eingang
v [+/- 100%] (nEG): Bidirektionaler Eingang
Beispiel: An einem Eingang 0 / 10 V
- entspricht 0 V dem Sollwert -100 %.
- entspricht 5 V dem Sollwert 0 %.
- entspricht 10 V dem Sollwert +100 %.
M [Pkt X Verschieb AI4]
Koordinate des Entlinearisierungspunkts am Eingang.
• 0 % entspricht [min. Wert], wenn der Bereich 0 V 100 % ist.
[Spannung] (10U)
0 bis 20,0 mA 0 mA
0 bis 10,0 V 0 V
0 bis 20,0 mA 20,0 mA
0 bis 10,0 V 10,0 V
0 bis 10,00 s 0 s
[0 - 100%] (POS)
0 bis 100 % 0 %
• 0 % entspricht wenn der Bereich -100 % V +100 % ist.
• 100 % entspricht [max. Wert].
AI4S
1755856 12/2009 97
M [Pkt Y Verschieb AI4]
Koordinate des Entlinearisierungspunkts am Ausgang (Frequenzsollwert).
0 bis 100 % 0 %

[1.5 EIN/ AUSGÄNGE] (I-O-)
ACHTUNG
UNERWARTETER BETRIEB DES GERÄTS
Durch den Wechsel in den forcierten Lokalmodus (siehe Seite 245) bleibt der vi rtuell e Einga ng auf den
letzten übertragenen Wert eingefroren.
Verwenden Sie nicht den virtuellen Eingang und den Modus "Forced Lokal" zusammen in derselben
Konfiguration.
Die Nichtbeachtung dieser Vorkehrung kann zum Tod oder schwerwiegenden Verletzun gen führen.
Code Name/Beschreibung Einstellbereich Werkseinstellung
AU1-
AIC1
nO
Mdb
CAn
nEt
APP
b [AI1 VIRTUELLE]
M [AI1 Kommunikation]
Virtueller Eingang.
Dieser Parameter kann ebenfalls im Untermenü [PID REGLER] (PId-), Seite 177, aufgerufen werden.
[Nein] (nO): Nicht zugeordnet (in diesem Fall erscheint de r virtu ell e Eing ang nicht in den Paramet ern für
die Belegung der Analogeingänge der Funktionen)
v [Modbus] (Mdb): Integrierter Modbus
v [CANopen] (CAn): Integrierter CANopen
v [Kom. Karte] (nEt): Kommunikationskarte, wenn vorhanden
v [PLC Karte] (APP): Karte „Controller Inside“, wenn vorhanden
Skale: Der durch diesen Eingang übertragene Wert 8192 entspricht 10 V an einem 10-V-Eingang.
[Nein] (nO)
98 1755856 12/2009

[1.5 EIN/AUSGÄNGE] (I-O-)
Code Name/Beschreibung Einstellbereich Werkseinstellung
PLI-
PIA
PIL
PFr
PFI
b [KONFIG. RP PULSEING.]
Der Zugriff ist möglich, wenn die Optionskarte VW3A3202 vorhanden ist.
M [Zuord PulsRef]
Der Parameter kann nur gelesen werden und ist nicht konfigurierbar.
Er zeigt alle Funktionen an, die dem Eingang „Pulse Input“ zugeordnet sind, sodass beispielsweise geprüft
werden kann, ob Kompatibilitätsprobleme bestehen.
M [min. Wert RP]
Die Frequenz entspricht der minimalen Drehzahl.
M [max. Wert RP]
Die Frequenz entspricht der maximalen Drehzahl.
M [Filter RP]
Filterung eventueller Störungen.
- 30,00 bis 30,00 kHz 0
0 bis 30,00 kHz 30,00 kHz
0 bis 1000 ms 0
1755856 12/2009 99

[1.5 EIN/ AUSGÄNGE] (I-O-)
Sollwert
100 %
0
[min. Wert]
(EIL)
[max. Wert]
(EFr)
300 kHz
Sollwert
100 %
0
[min. Wert]
(EIL)
[max. Wert]
(EFr)
Frequenzeingang
Frequenzeingang
300 kHz
Sollwert
100 %
[min. Wert]
(EIL)
[max. Wert]
(EFr)
300 kHz
Frequenzeingang
0
Konfiguration des als Sollwert verwendeten Encodereingangs mit einem
Frequenzgenerator
Dieser Sollwert hat kein Vorzeichen. Des Weiteren muss die Fahrtrichtung durch den Befehlskanal bereitgestellt werden (beispielsweise
Logikeingänge).
Minimal- und Maximalwerte (Eingangswerte):
Der Minimalwert entspricht einem Minimalsollwert von 0 % und der Maximal wert eine m Maximals ollwert v on 100 %. Der Minimal wert kann
negativ und größer als der Maximalwert sein.
Durch Zuordnung eines negativen Werts für den Minimalwert kann ein Sollwert mit der Frequenz Null erreicht werden.
100 1755856 12/2009

[1.5 EIN-/AUSGÄNGE] (I-O-)
Auf die Konfiguration des Encoders kann auch über das Menü [1.4 ANTRIEBSDATEN] (drC-) zugegriffen werden.
Code Name/Beschreibung Einstellbereich Werkseinstellung
IEn-
EnS
EnC
AAbb
Ab
nO
YES
dOnE
b [KONFIG. ENCODER]
Der Zugriff auf geberspezifische Parameter ist nur möglich, wenn die Encoder-Karte vorhanden ist.
Die
verfügbare Auswahl ist vom Typ der verwendeten Encoder-Karte abhängig.
M [Encoder Signal]
Der Parameter ist zugänglich, wenn eine Inkrementalgeber-Karte vorhanden ist.
Je nach verwendetem Encodertyp zu konfigurieren.
v [AABB] (AAbb): Für die Signale A, A-, B, B-.
v [AB] (Ab): Für die Signale A, B.
A
v [A] (A): Für das Signal A. Der Wert ist nicht zugänglich, wenn [Encoder aktiv] (EnU), Seite 102 = [Regelung]
(rEG).
M [Encoder Test]
Überprüfung der Encoder-Rückführung. Siehe das Verfahren auf Seite 80.
Der Parameter ist zugänglich, wenn eine Encoder-Karte vorhanden ist und wenn [Encoder aktiv] (EnU),
Seite
102, von [Dig Sollwert] (PGr) abweicht.
v [Nicht ausg.] (nO): Überprüfung nicht ausgeführt.
v [Ja] (YES): Aktiviert die Überwachung des Encoders.
v [ausgeführt] (dOnE): Überprüfung erfolgreich ausgeführt.
Das Prüfverfahren kontrolliert Folgendes:
- Die Drehrichtung des Encoders / Motors
- Vorhandene Signale (Kontinuität der Verdrahtung)
- Die Anzahl der Impulse / Umdrehungen
Im Fehlerfall schaltet der Umrichter mit [Fehler Encoder] (EnF) ab.
[AABB] (AAbb)
[Nicht ausg.] (nO)
1755856 12/2009 101
 Loading...
Loading...