

Page 1

Reference Manual
Kinetix 3 Host Commands for Serial Communication
Catalog Numbers 2071-AP0, 2071-AP1, 2071-AP2, 2071-AP4, 2071-AP8, 2071-A10, 2071-A15
Page 2
Important User Information
IMPORTANT
Solid-state equipment has operational characteristics differing from those of electromechanical equipment. Safety
Guidelines for the Application, Installation and Maintenance of Solid State Controls (publication SGI-1.1
your local Rockwell Automation sales office or online at http://www.rockwellautomation.com/literature/
important differences between solid-state equipment and hard-wired electromechanical devices. Because of this difference,
and also because of the wide variety of uses for solid-state equipment, all persons responsible for applying this equipment
must satisfy themselves that each intended application of this equipment is acceptable.
In no event will Rockwell Automation, Inc. be responsible or liable for indirect or consequential damages resulting from the
use or application of this equipment.
The examples and diagrams in this manual are included solely for illustrative purposes. Because of the many variables and
requirements associated with any particular installation, Rockwell Automation, Inc. cannot assume responsibility or
liability for actual use based on the examples and diagrams.
No patent liability is assumed by Rockwell Automation, Inc. with respect to use of information, circuits, equipment, or
software described in this manual.
Reproduction of the contents of this manual, in whole or in part, without written permission of Rockwell Automation,
Inc., is prohibited.
Throughout this manual, when necessary, we use notes to make you aware of safety considerations.
available from
) describes some
WARNING: Identifies information about practices or circumstances that can cause an explosion in a hazardous environment,
which may lead to personal injury or death, property damage, or economic loss.
ATTENTION: Identifies information about practices or circumstances that can lead to personal injury or death, property
damage, or economic loss. Attentions help you identify a hazard, avoid a hazard, and recognize the consequence.
SHOCK HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that dangerous
voltage may be present.
BURN HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that surfaces may
reach dangerous temperatures.
Identifies information that is critical for successful application and understanding of the product.
Allen-Bradley, Kinetix, MicroLogix, Rockwell Software, Rockwell Automation, TechConnect, and Ultra3000 are trademarks of Rockwell Automation, Inc.
Trademarks not belonging to Rockwell Automation are property of their respective companies.
Page 3
Summary of Changes
This manual contains new and updated information. Changes throughout this
revision are marked by change bars, as shown to the right of this paragraph.
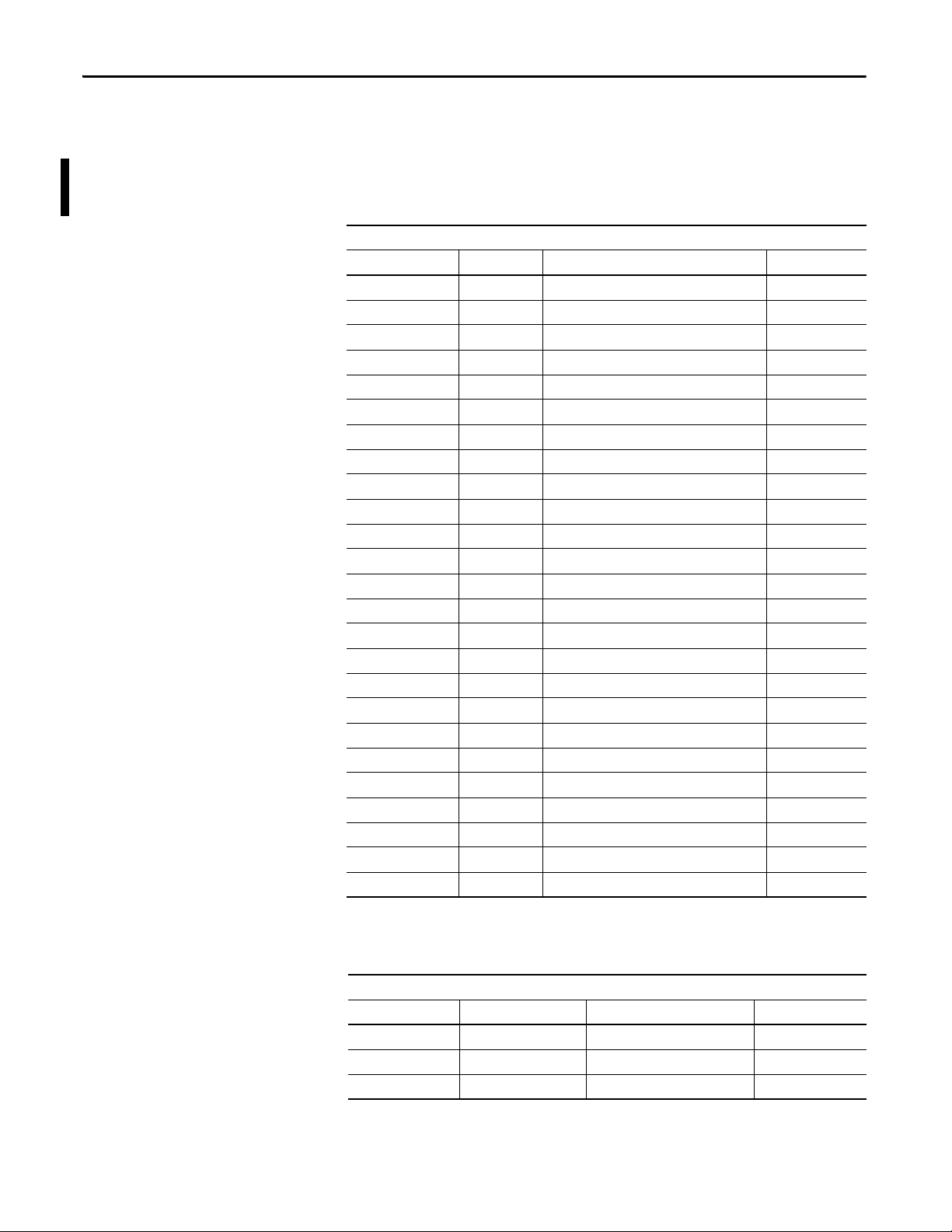
New and Updated Information
This table contains the changes made to this revision.
Top ic Pag e
Added the exception code Servo On Write Error
Renumbered the Modbus address and the Kinetix® 3 Parameters in Group 5 Supplemental Drive Control table
Updated Modbus address range of 600…4999 and bullets 15
Updated Group 0 to Special Index 15
Added Modbus 4009, Index 0 Next Index to the Indexing Parameters table 15
Added Group 1 - Homing 16
Added Important statement and parameter usage information 23
Added descriptive text to Monitoring Parameter (Function Code 0x04) 24
Updated the Special Symbols table 29
Updated the [Pr - 0.00] parameter range 48
Updated the [Pr - 0.01] parameter to reserved 48
Updated the [Pr - 0.04] parameter units to % 51
Updated the [Pr - 0.07] parameter range 55
Updated the [Pr - 1.01] parameter range 67
Updated the [Pr - 1.11] parameter range 70
Updated the [Pr - 1.13] parameter range 70
Updated the [Pr- 1.17] parameter default 72
Updated the [Pr - 1.34] parameter range 78
Updated the [Pr - 2.00] parameter range and default value 81
Updated the Group 2 - Speed Control Modbus addresses 81…84
Update the [Pr - 4.00] parameter units to 0.1% of rated continuous current/V 90
Updated the Group 5 - Supplemental Drive Controls Modbus Addresses 92 …96
Update the [Pr - 5.05] parameter range and default values 93
Updated Group 0 - Indexing System Modbus addresses 114…116
Update [IN01.09] range and default values 122
Updated hex values in Variables table 131
Updated Variable 15 digital outputs bit16 to D05 133
Updated Variable 26 Digital Outputs 134
12
14
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 3
Page 4

Summary of Changes
Notes:
4 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 5

Table of Contents
Preface
Modbus Protocol
Communication Protocol (RS-232/
ASCII)
About This Publication. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Who Should Use This Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Conventions Used in This Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Additional Resources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Chapter 1
Function Codes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Exception Codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Address Maps. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Standard Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Indexing Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Save Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Monitoring Parameter (Function Code 0x04) . . . . . . . . . . . . . . . . . . 24
Fault and Warning Status Parameter - Input Registers . . . . . . . . . . 24
Output Function Status Parameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Running Parameter (Function Code 0x06 or 0x10) . . . . . . . . . . . . . 26
Input Function Parameter (Function Code 0x03, 0x06, or 0x10) . 26
Chapter 2
Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Special Symbols . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Packet Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Checksum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
General Commands (ASCII)
Chapter 3
Read Parameter (SET) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Write Parameter (STR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Write Parameter (CHP) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Indexing Command Extended (XCE) . . . . . . . . . . . . . . . . . . . . . . . . . 33
Read Indexing Parameter (XET) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Write Indexing Parameter (XHP) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Write Indexing Parameter (XTR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Fault Reset (RST) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Monitor Variable (MDM) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Triggered Data Collection (MOT) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Variable Roll Monitoring (MOR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Automatic Task (TAT) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Manual Task (TMN) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Read Fault Contents (EHY) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Jog (JOG) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Read Drive Status (STS) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Other Functions (ETC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Verify Software Version (VER) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 5
Page 6

Table of Contents
Verify Servo Connection (LIV) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Read Fault Detailed Data (DIE) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Enable Drive (SVRON) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Disable Drive (SVROF) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Reset Drive (HWR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Appendix A
Standard Drive Parameters
Indexing Drive Parameters
Parameter Groupings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Parameter Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Group 0 - System Level . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Group 1 - Gain Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Group 2 - Speed Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Group 3 - Position Control. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Group 4 - Torque Controls. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Group 5 - Supplemental Drive Controls . . . . . . . . . . . . . . . . . . . . . . . . 92
Group 6 - Supplemental Gain and Report Settings. . . . . . . . . . . . . . . 97
Group 7 - Manufacturing Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Group 8 - Reserved Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Group 9 - Motor Controls. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Appendix B
Parameter Groupings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Parameter Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Group 0 - Indexing System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Group 1 - Homing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Group 2 - Indexing Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
Group 3 - Index Move Profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Group 4 - Index Position/Distance . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Group 5 - Index Registration Distance . . . . . . . . . . . . . . . . . . . . . . . . 125
Group 6 - Index Batch Count . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Group 7 - Index Dwell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
Group 8 - Index Velocity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
Group 9 - Index Move Profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
Group 10 - Index Acceleration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Group 11 - Index Deceleration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Group 12 - Index Next Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
Appendix C
Warnings and Fault Codes
Warnings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
Fault Codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
Appendix D
Monitor Variables
6 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Compiled Variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Variable 15 - Digital Inputs and Outputs . . . . . . . . . . . . . . . . . . . . . . 133
Page 7

Table of Contents
Variable 25 - Digital Inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Variable 26 - Digital Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
Variable 29 - Indexing Inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
Variable 30 - Indexing Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 7
Page 8

Table of Contents
Notes:
8 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 9
Preface
About This Publication
Who Should Use This Manual
Conventions Used in This Manual
This manual describes the host command set for end-user interface with a
Kinetix 3 drive via serial communication. Use this manual for designing,
programming, and troubleshooting host commands for serial communication
with the Kinetix 3 drives.
This manual is intended for engineers, programmers, or technicians directly
involved in the installation, operation, programming, and field maintenance of a
Kinetix 3 drive by using host mode commands.
If you do not have a basic understanding of the Kinetix 3 drive, contact your local
Rockwell Automation sales representative before using this product for the
availability of training courses.
The conventions starting below are used throughout this manual:
• Bulleted lists such as this one provide information, not procedural steps
• Numbered lists provide sequential steps or hierarchical information
Additional Resources
These documents contain additional information concerning related products
from Rockwell Automation.
Resource Description
Kinetix 3 Component Servo Drive Installation Instructions,
publication 2071-IN001
Kinetix 3 I/O Breakout Board Installation Instructions,
publication 2071-IN002
Kinetix 3 Motor Feedback Breakout Board Installation
Instructions, publication 2071-IN003
Kinetix 3 Serial Communication Cables Installation
Instructions, publication 2090-IN019
Kinetix 3 Component Servo Drive User Manual,
publication 2071-UM001
Ultraware User Manual, publication 2098-UM001
Information on configuring and operating Ultraware
Mounting and wiring instructions, and mounting
dimensions.
Information on installing, configuring, starting up, and
troubleshooting for your Kinetix 3 servo drive system.
software with servo drives and motors.
You can view or download publications at
http://www.rockwellautomation.com/literature
. To order paper copies of
technical documentation, contact your local Allen-Bradley distributor or
Rockwell Automation sales representative.
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 9
Page 10

Preface
Notes:
10 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 11
Chapter 1
Modbus Protocol
This chapter defines the Modbus protocol as it applies to a Kinetix 3 drive.
Function Codes
The register number of Modbus devices may begin with 0 or 1, because this is
determined by the Modbus host you have selected. If your controller requires it, a
'1' must be added to the register number.
The maximum number of parameters that can be read or written at the same time
is the same as the number of Modbus addresses, which is the same as the number
of the parameters in each group. In other words, all the parameters in each group
can be read together or written together.
Function Code Description
03 (0x03) Read Holding Registers
04 (0x04) Read Input Registers
06 (0x06) Write Single Register
16 (0x10) Write Multiple Register
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 11
Page 12
Chapter 1 Modbus Protocol
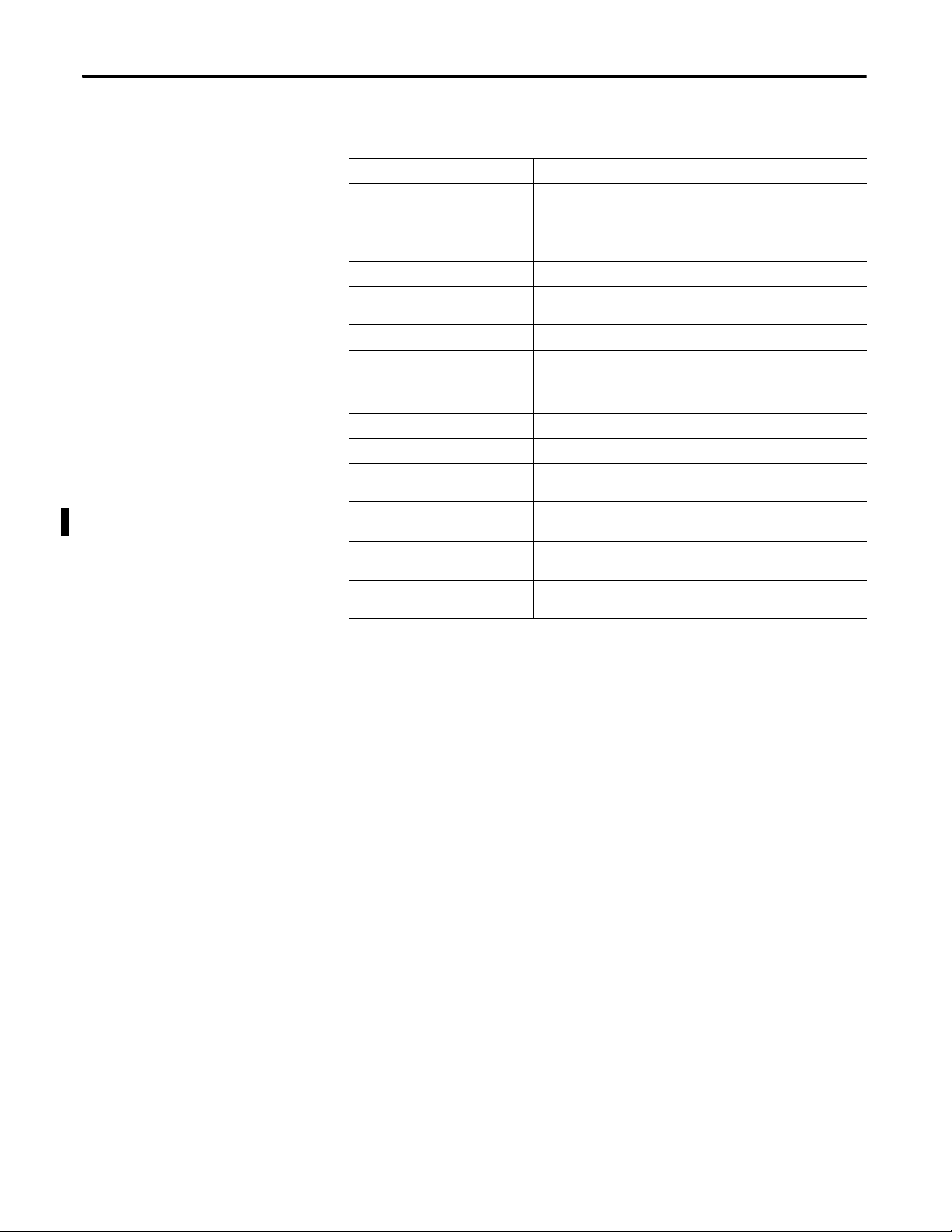
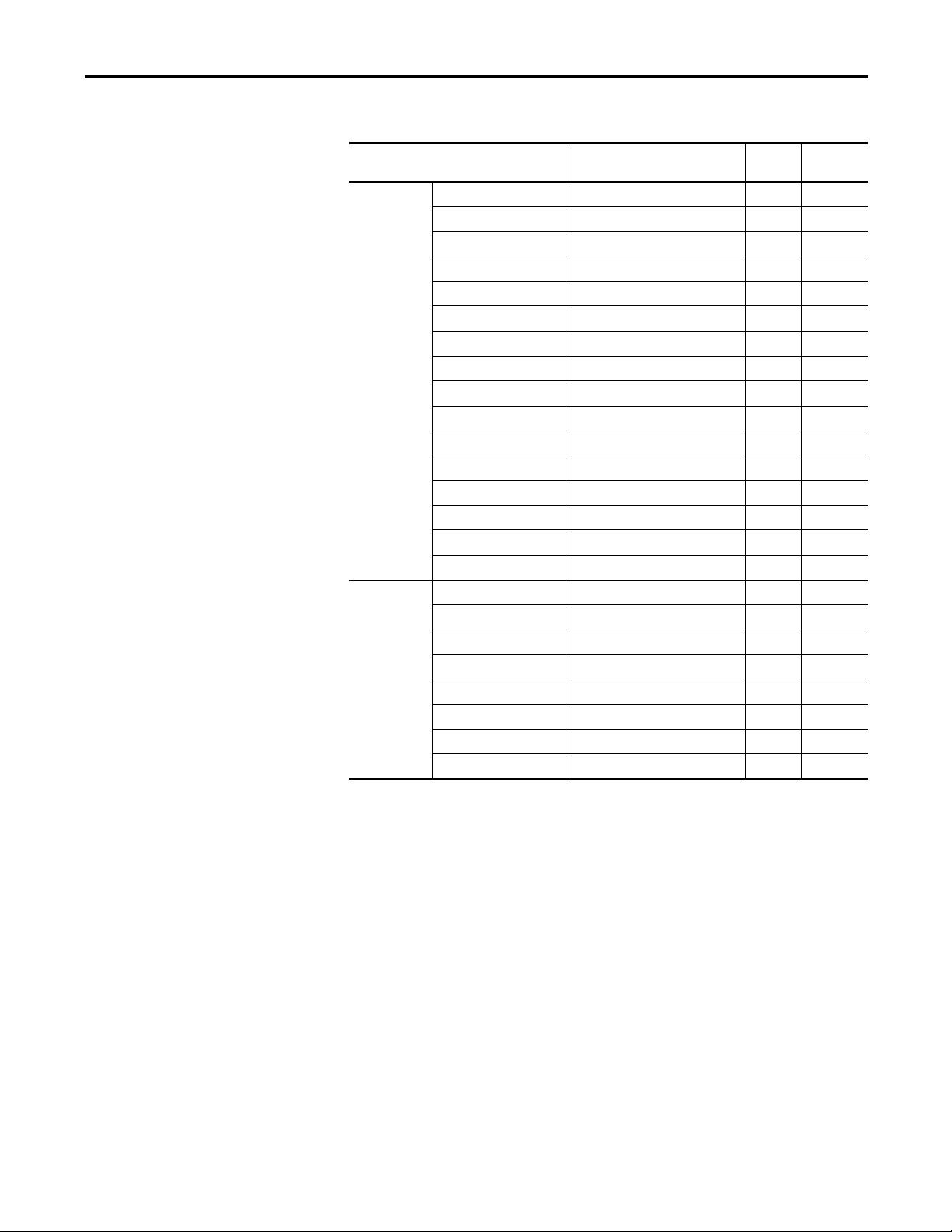
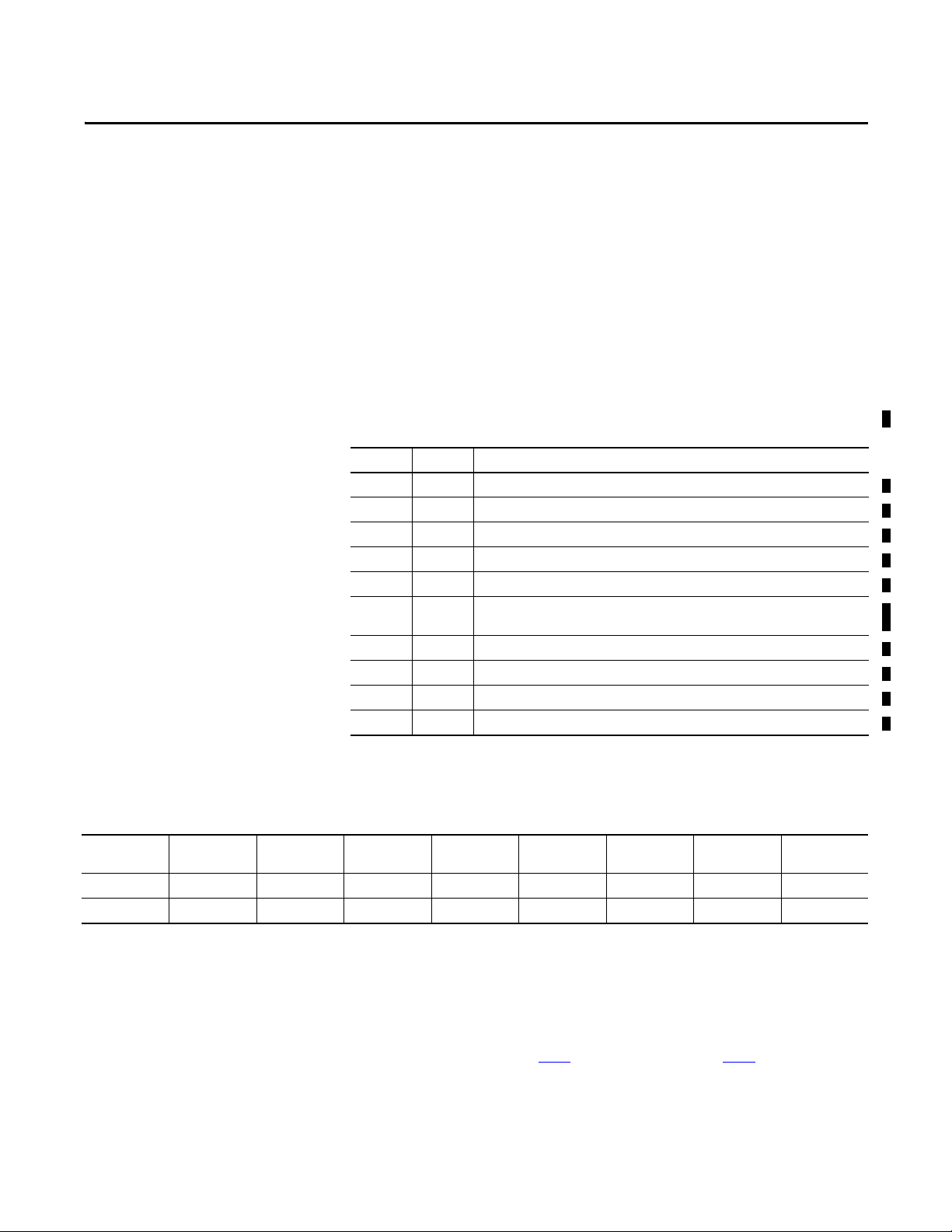
Exception Codes
The Kinetix 3 Modbus protocol uses the following exception codes from the Modbus
specifications.
Exception Code Name Meaning
0x01 Illegal Function The function code received in the query is not an allowable action for the
0x02 Illegal Data
(1)
0x03
0x06 Slave Device Busy The slave is engaged in processing Run command. The master should
0x07 Illegal CRC Value The CRC value received in the query is wrong value.
0x0C Illegal Frame The byte length of the Query Reception frame is out of the limit.
(2)
0x0D
(1)
0x0E
(3)
0x0F
(4)
0x10
0x1E Ser vo On Write
0x1F Servo Error Fail When the slave is Servo Error condition, and receives a Servo ON command
0x21 Drive Type Fail When drive type of the slave is Indexing, slave receives run command 02,
slave.
Address
Illegal Data Value The length of query data field is not valid for the slave.
Illegal Sequence The data sequence received in the query is not an allowable write command
Illegal Data Range The value of query data field is not valid for the slave.
Illegal Command The slave is in Run control and received an invalid command.
Illegal Control The slave is not in the Network mode, but received a net work control
Error
The data address received in the query is not an allowable address for the
slave.
retransmit the message later when the slave is free.
for the slave.
command.
Attempted to write to parameters that are inaccessible when the servo
drive is enabled.
from master.
03, 04.
(1) Exception code 0x03 indicates an Illegal Data Value. It means the length of data string is incorrect. Exception code 14(0x0E) indicates
an Illegal Data Range. It means that data range exceeds the limit of the minimum or maximum value.
(2) Exception code 0x0D is generated if the master accesses a 32-bit data address with function code 06 or either the high or low
address of 32-bit data with function code 10.
(3) Exception code 15(0x0F) indicates an Illegal Command was issued. It occurs when a received Run control cannot be executed at the
moment.
(4) Exception code 16(0x10) is an Illegal Control. It occurs when the Network Control Mode is not set, but the drive requests a Run
Control command or an I/O Control command through the network.
12 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 13
Modbus Protocol Chapter 1
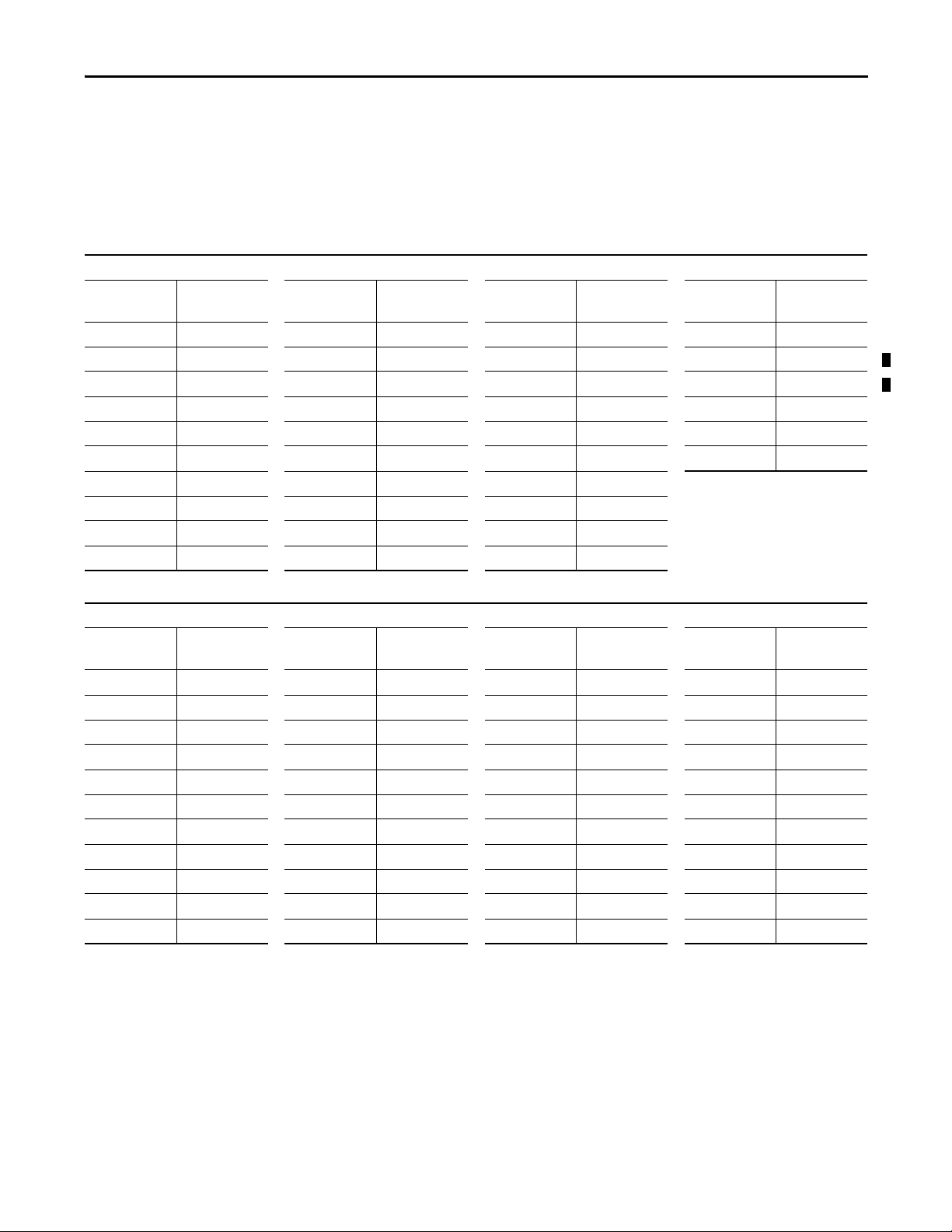
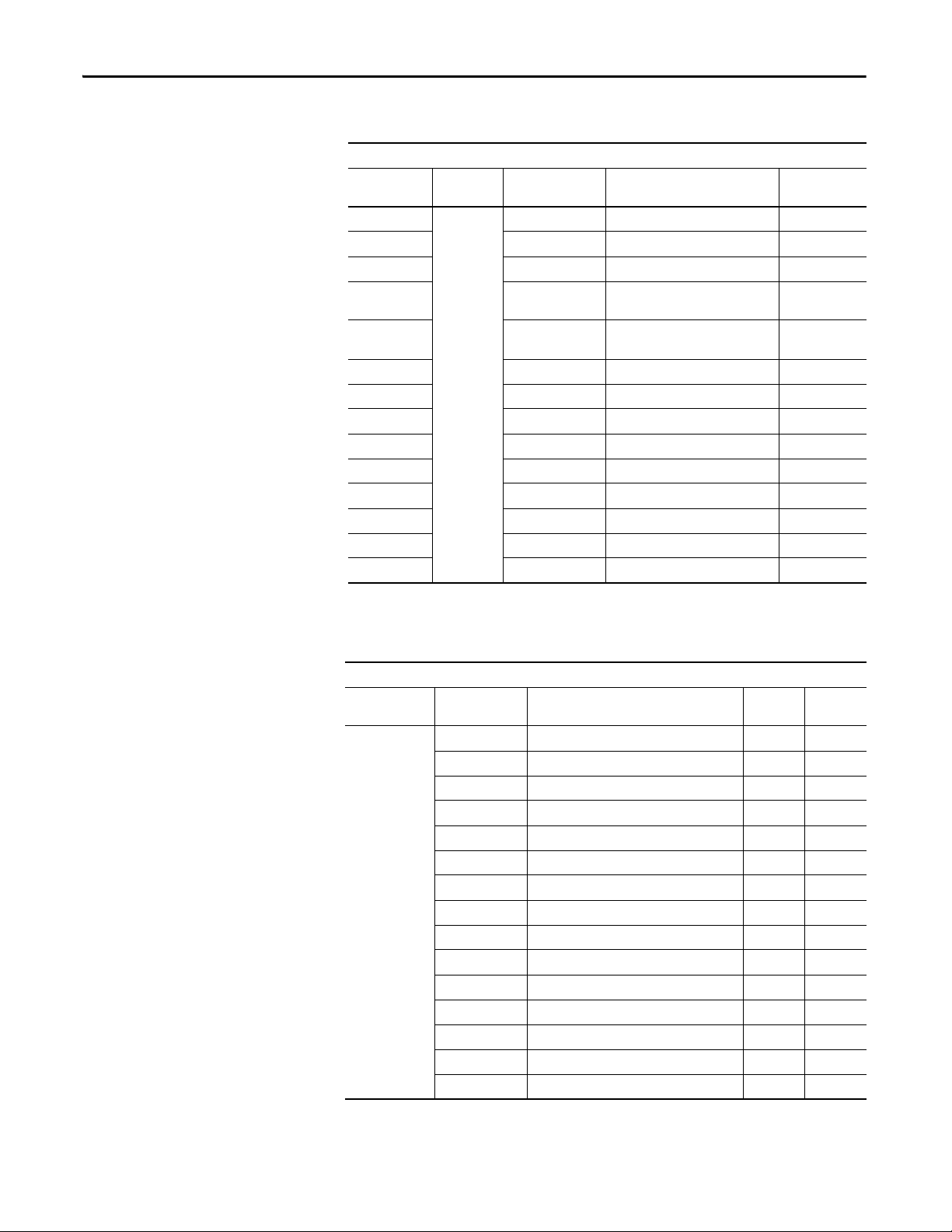
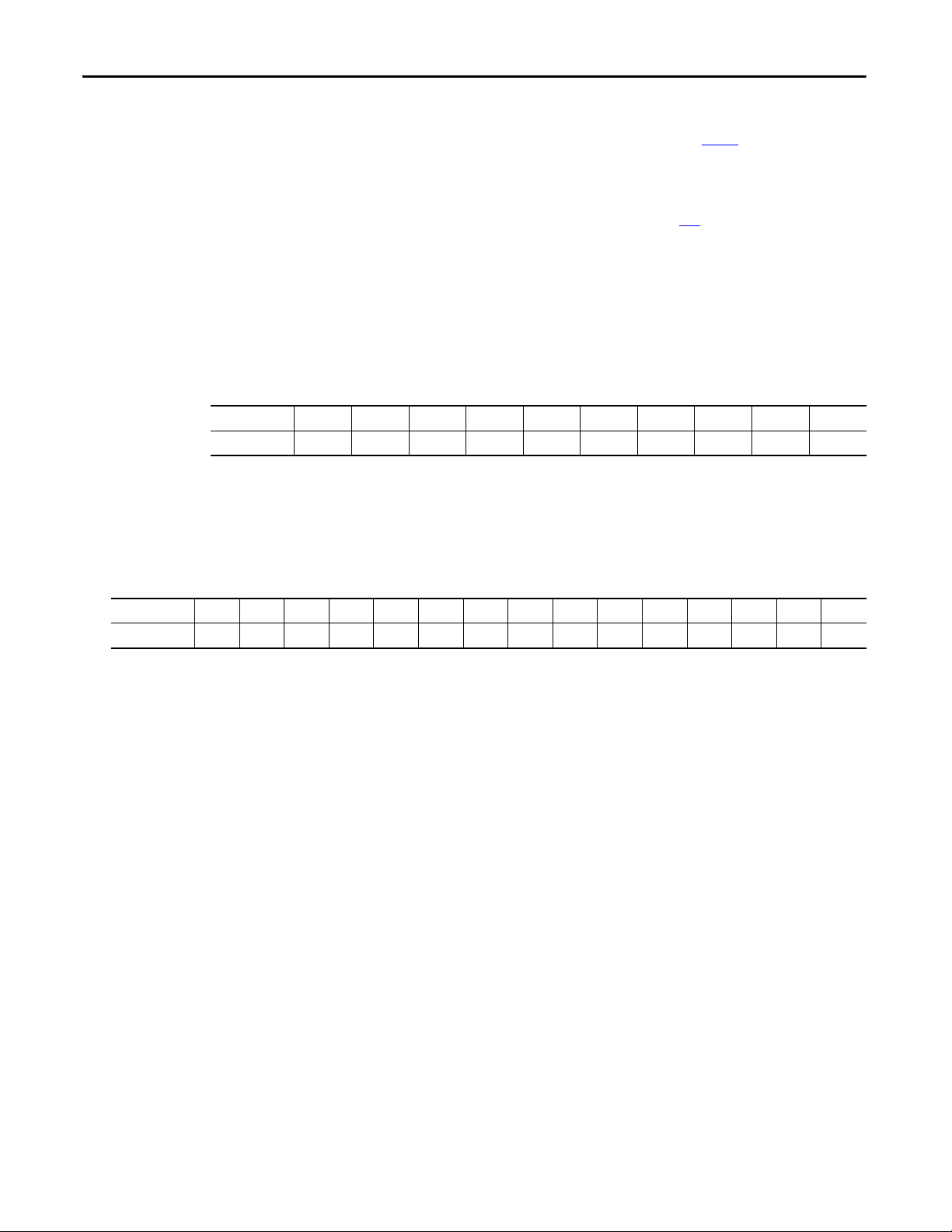
Address Maps
All standard and indexing parameters (Pr-x.xx or Inxx.xx) require a unique
register address. The host computer assigns the initial address number and
determines whether the register numbers begin with 0 or 1.
Standard Parameters
Group 0 - System Level
Modbus
Address
0 Pr-0.00 10 Pr-0.09 20 Pr-0.19 30 Pr-0.29
1 Reserved 11 Pr-0.10 21 Pr-0.20 31 Pr-0.30
2 Reserved 12 Pr-0.11 22 Pr-0.21 32 Pr-0.31
3 Pr-0.02 13 Pr-0.12 23 Pr-0.22 33 Pr-0.32
4 Pr-0.03 14 Pr-0.13 24 Pr-0.23 34…42 Reserved
5 Pr-0.04 15 Pr-0.14 25 Pr-0.24 43…99 Reserved
6 Pr-0.05 16 Pr-0.15 26 Pr-0.25
7 Pr-0.06 17 Pr-0.16 27 Pr-0.26
8 Pr-0.07 18 Pr-0.17 28 Pr-0.27
9 Pr-0.08 19 Pr-0.18 29 Pr-0.28
Kinetix 3
Parameter
Modbus,
Address
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
Group 1 - Gain Control
Modbus
Address
100 Pr-1.00 111 Pr-1.11 122 Pr-1.22 133 Pr-1.33
101 Pr-1.01 112 Pr-1.12 123 Pr-1.23 134 Pr-1.34
102 Pr-1.02 113 Pr-1.13 124 Pr-1.24 135 Pr-1.35
103 Pr-1.03 114 Pr-1.14 125 Pr-1.25 136 Pr-1.36
104 Pr-1.04 115 Pr-1.15 126 Pr-1.26 137 Pr-1.37
105 Pr-1.05 116 Pr-1.16 127 Pr-1.27 138 Pr-1.38
106 Pr-1.06 117 Pr-1.17 128 Pr-1.28 139 Pr-1.39
107 Pr-1.07 118 Pr-1.18 129 Pr-1.29 140 Pr-1.40
108 Pr-1.08 119 Pr-1.19 130 Pr-1.30 141 Pr-1.41
109 Pr-1.09 120 Pr-1.20 131 Pr-1.31 142 Pr-1.42
1 1 0 P r - 1 . 1 0 1 2 1 Pr - 1 . 2 1 1 3 2 P r - 1 . 3 2 1 4 3 … 1 9 9 R e s e r v e d
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 13
Page 14
Chapter 1 Modbus Protocol
Group 2 - Speed Control
Modbus
Address
200 Pr-2.00 206 Pr-2.04 212 Pr-2.10
201 Pr-2.01 207 Pr-2.05 213 Pr-2.11
202 Pr-2.02[Lo] 208 Pr-2.06 214 Pr-2.12
203 Pr-2.02[Hi] 209 Pr-2.07 215 Pr-2.13
204 Pr-2.03[Lo] 210 Pr-2.08 216…299 Reserved
205 Pr-2.03[Hi] 211 Pr-2.09
Group 3 - Position Control
Modbus
Address
300 Pr-3.00 303 Pr-3.03 306 Pr-3.06 309…399 Reserved
301 Pr-3.01 304 Pr-3.04 307 Reserved
302 Pr-3.02 305 Pr-3.05 308 Pr-3.08
Kinetix 3
Parameter
Kinetix 3
Parameter
Modbus
Address
Modbus
Address
Kinetix 3
Parameter
Kinetix 3
Parameter
Modbus
Address
Modbus
Address
Kinetix 3
Parameter
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
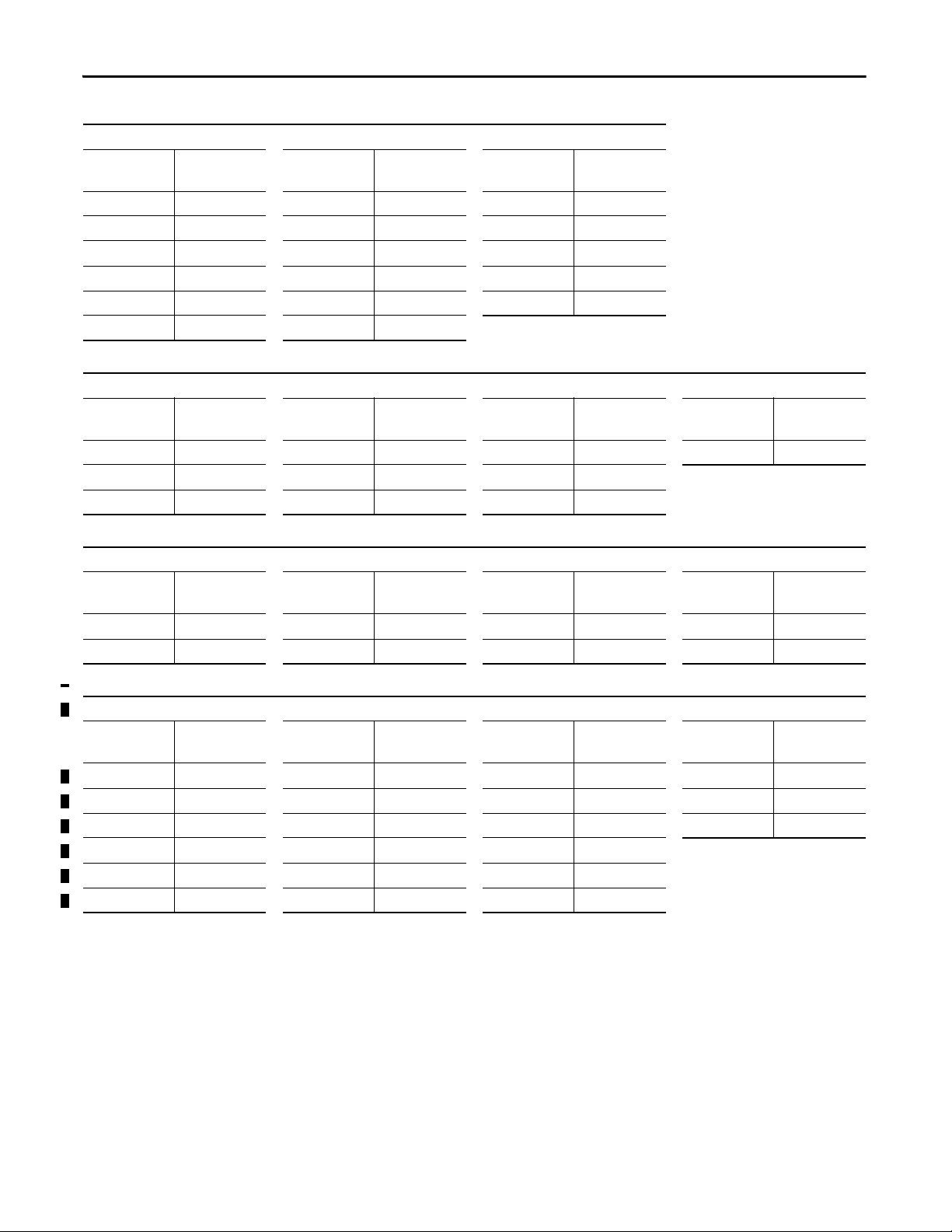
Group 4 - Torque Control
Modbus
Address
400 Pr-4.00 402 Pr-4.02 404 Pr-4.04 406 Pr-4.06
401 Pr-4.01 403 Pr-4.03 405 Pr-4.05 407…499 Reserved
Group 5 - Supplemental Drive Control
Modbus
Address
500 Pr-5.00 506 Pr-5.06 512 Reserved 518 Pr-5.16[Lo]
501 Pr-5.01 507 Pr-5.07 513 Pr-5.12 519 Pr-5.16[Hi]
502 Pr-5.02 508 Pr-5.08 514 Pr-5.13 520…599 Reserved
503 Pr-5.03 509 Pr-5.09 515 Pr-5.14
504 Pr-5.04 510 Pr-5.10[Lo] 516 Pr-5.15[Lo]
505 Pr-5.05 511 Pr-5.10[Hi] 517 Pr-5.15[Hi]
Kinetix 3
Parameter
Kinetix 3
Parameter
Modbus
Address
Modbus
Address
Kinetix 3
Parameter
Kinetix 3
Parameter
Modbus
Address
Modbus
Address
Kinetix 3
Parameter
Kinetix 3
Parameter
Modbus
Address
Modbus
Address
Kinetix 3
Parameter
Kinetix 3
Parameter
14 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 15
Indexing Parameters
Special Index Group 0
Modbus
Address
4000 Index 0 Distance
4001 Index 0 Distance
4002 Index 0 Velocity 4007 Index 0 Dwell
4003 Index 0 Decel Low 4008 Index 0 Option
4004 Index 0 Decel High 4009 Index 0 Next Index
Group 0 - Indexing System
Modbus
Address
5000 In00.00 5006 In00.03.Hi
5001 In00.01.Lo 5007 In00.04
5002 In00.01.Hi 5008 In00.05.Lo
5003 In00.02.Lo 5009 In00.05.Hi
5004 In00.02.Hi 5010 In00.06.Lo
5005 In00.03.Lo 5011 In00.06.Hi
Kinetix 3
Parameter
Low
High
Kinetix 3
Parameter
Modbus
Address
4005 Index 0 Accel Low
4006 Index 0 Accel High
4010…4199 Reserved
Modbus
Address
5012…5199 Reserved
Kinetix 3
Parameter
Kinetix 3
Parameter
Modbus Protocol Chapter 1
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 15
Page 16
Chapter 1 Modbus Protocol
Group 1 - Index Homing
Modbus
Address
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
5200 In01.00 5206 In01.05.Lo 5212 In01.08.Hi
5201 In01.01 5207 In01.05.Hi 5213 In01.09
5202 In01.02 5208 In01.06 5214 In01.10
5203 In01.03 5209 In01.07.Lo 5215 In01.11
5204 In01.04.Lo 5210 In01.07.Hi 5216 In01.12.Lo
5205 In01.04.Hi 5211 In01.08.Lo 5217 In01.12.Hi
5218…5399 Reserved
Group 2 – Index Option
Modbus
Address
Kinetix 3
Parame ter
Modbus
Address
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parame ter
5400 In02.00 5416 In02.16 5432 In02.32 5448 In02.48
5401 In02.01 5417 In02.17 5433 In02.33 5449 In02.49
5402 In02.02 5418 In02.18 5434 In02.34 5450 In02.50
5403 In02.03 5419 In02.19 5435 In02.35 5451 In02.51
5404 In02.04 5420 In02.20 5436 In02.36 5452 In02.52
5405 In02.05 5421 In02.21 5437 In02.37 5453 In02.53
5406 In02.06 5422 In02.22 5438 In02.38 5454 In02.54
5407 In02.07 5423 In02.23 5439 In02.39 5455 In02.55
5408 In02.08 5424 In02.24 5440 In02.40 5456 In02.56
5409 In02.09 5425 In02.25 5441 In02.41 5457 In02.57
5410 In02.10 5426 In02.26 5442 In02.42 5458 In02.58
5411 In02.11 5427 In02.27 5443 In02.43 5459 In02.59
5412 In02.12 5428 In02.28 5443 In02.43 5460 In02.60
5413 In02.13 5429 In02.29 5444 In02.44 5461 In02.61
5414 In02.14 5430 In02.30 5445 In02.45 5462 In02.62
5415 In02.15 5431 In02.31 5446 In02.46 5463 In02.63
5447 In02.47 5464 …5599 Reserved
Group 3 - Reserved
Modbus
Address
Kinetix 3
Parameter
5600…5799 Reserved
16 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 17
Modbus Protocol Chapter 1
Group 4 – Index Position/Distance
Modbus
Address
5800 In04.00.Lo 5834 In04.17.Lo 5868 In04.34.Lo 5902 In04.51.Lo
5801 In04.00.Hi 5835 In04.17. Hi 5869 In04.34. Hi 5903 In04.51.Hi
5802 In04.01.Lo 5836 In04.18.Lo 5870 In04.35.Lo 5904 In04.52.Lo
5803 In04.01.Hi 5837 In04.18. Hi 5871 In04.35. Hi 5905 In04.52.Hi
5804 In04.02.Lo 5838 In04.19.Lo 5872 In04.36.Lo 5906 In04.53.Lo
5805 In04.02.Hi 5839 In04.19. Hi 5873 In04.36. Hi 5907 In04.53.Hi
5806 In04.03.Lo 5840 In04.20.Lo 5874 In04.37.Lo 5908 In04.54.Lo
5807 In04.03.Hi 5841 In04.20. Hi 5875 In04.37. Hi 5909 In04.54.Hi
5808 In04.04.Lo 5842 In04.21.Lo 5876 In04.38.Lo 5910 In04.55.Lo
5809 In04.04.Hi 5843 In04.21. Hi 5877 In04.38. Hi 5911 In04.55.Hi
5810 In04.05.Lo 5844 In04.22.Lo 5878 In04.39.Lo 5912 In04.56.Lo
5811 In04.05.Hi 5845 In04.22. Hi 5879 In04.39. Hi 5913 In04.56.Hi
5812 In04.06.Lo 5846 In04.23.Lo 5880 In04.40.Lo 5914 In04.57.Lo
5813 In04.06.Hi 5847 In04.23. Hi 5881 In04.40. Hi 5915 In04.57.Hi
5814 In04.07.Lo 5848 In04.24.Lo 5882 In04.41.Lo 5916 In04.58.Lo
5815 In04.07.Hi 5849 In04.24. Hi 5883 In04.41. Hi 5917 In04.58.Hi
5816 In04.08.Lo 5850 In04.25.Lo 5884 In04.42.Lo 5918 In04.59.Lo
5817 In04.08.Hi 5851 In04.25. Hi 5885 In04.42. Hi 5919 In04.59.Hi
5818 In04.09.Lo 5852 In04.26.Lo 5886 In04.43.Lo 5920 In04.60.Lo
5819 In04.09.Hi 5853 In04.26. Hi 5887 In04.43. Hi 5921 In04.60.Hi
5820 In04.10.Lo 5854 In04.27.Lo 5888 In04.44.Lo 5922 In04.61.Lo
5821 In04.10.Hi 5855 In04.27. Hi 5889 In04.44. Hi 5923 In04.61.Hi
5822 In04.11.Lo 5856 In04.28.Lo 5890 In04.45.Lo 5924 In04.62.Lo
5823 In04.11.Hi 5857 In04.28. Hi 5891 In04.45. Hi 5925 In04.62.Hi
5824 In04.12.Lo 5858 In04.29.Lo 5892 In04.46.Lo 5926 In04.63.Lo
5825 In04.12.Hi 5859 In04.29. Hi 5893 In04.46. Hi 5927 In04.63.Hi
5826 In04.13.Lo 5860 In04.30.Lo 5894 In04.47.Lo 5928…5999 Reserved
5827 In04.13.Hi 5861 In04.30. Hi 5895 In04.47.Hi
5828 In04.14.Lo 5862 In04.31.Lo 5896 In04.48.Lo
5829 In04.14.Hi 5863 In04.31. Hi 5897 In04.48.Hi
5830 In04.15.Lo 5864 In04.32.Lo 5898 In04.49.Lo
5831 In04.15.Hi 5865 In04.32. Hi 5899 In04.49.Hi
5832 In04.16.Lo 5866 In04.33.Lo 5900 In04.50.Lo
5833 In04.16. Hi 5867 In04.33. Hi 5901 In04.50.Hi
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parame ter
Modbus
Address
Kinetix 3
Parameter
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 17
Page 18
Chapter 1 Modbus Protocol
Group 5 - Reserved
Modbus
Address
6000…6199 Reserved
Group 6 - Reserved
Modbus
Address
6200…6399 Reserved
Group 7 – Index Dwell
Modbus
Address
6400 In07.00 6417 In07.17 6434 In07.34 6451 In07.51
6401 In07.01 6418 In07.18 6435 In07.35 6452 In07.52
6402 In07.02 6419 In07.19 6436 In07.36 6453 In07.53
6403 In07.03 6420 In07.20 6437 In07.37 6454 In07.54
6404 In07.04 6421 In07.21 6438 In07.38 6455 In07.55
6405 In07.05 6422 In07.22 6439 In07.39 6456 In07.56
6406 In07.06 6423 In07.23 6440 In07.40 6457 In07.57
6407 In07.07 6424 In07.24 6441 In07.41 6458 In07.58
6408 In07.08 6425 In07.25 6442 In07.42 6459 In07.59
6409 In07.09 6426 In07.26 6443 In07.43 6460 In07.60
6410 In07.10 6427 In07.27 6444 In07.44 6461 In07.61
6411 In07.11 6428 In07.28 6445 In07.45 6462 In07.62
6412 In07.12 6429 In07.29 6446 In07.46 6463 In07.63
6413 In07.13 6430 In07.30 6447 In07.47 6464 …6599 Reserved
6414 In07.14 6431 In07.31 6448 In07.48
6415 In07.15 6432 In07.32 6449 In07.49
6416 In07.16 6433 In07.33 6450 In07.50
Kinetix 3
Parameter
Kinetix 3
Parameter
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
18 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 19
Modbus Protocol Chapter 1
Group 8 – Index Velocity
Modbus
Address
6600 In08.00 6616 In08.16 6632 In08.32 6648 In08.48
6601 In08.01 6617 In08.17 6633 In08.33 6649 In08.49
6602 In08.02 6618 In08.18 6634 In08.34 6650 In08.50
6603 In08.03 6619 In08.19 6635 In08.35 6651 In08.51
6604 In08.04 6620 In08.20 6636 In08.36 6652 In08.52
6605 In08.05 6621 In08.21 6637 In08.37 6653 In08.53
6606 In08.06 6622 In08.22 6638 In08.38 6654 In08.54
6607 In08.07 6623 In08.23 6639 In08.39 6655 In08.55
6608 In08.08 6624 In08.24 6640 In08.40 6656 In08.56
6609 In08.09 6625 In08.25 6641 In08.41 6657 In08.57
6610 In08.10 6626 In08.26 6642 In08.42 6658 In08.58
6611 In08.11 6627 In08.27 6643 In08.43 6659 In08.59
6612 In08.12 6628 In08.28 6644 In08.44 6660 In08.60
6613 In08.13 6629 In08.29 6645 In08.45 6661 In08.61
6614 In08.14 6630 In08.30 6646 In08.46 6662 In08.62
6615 In08.15 6631 In08.31 6647 In08.47 6663 In08.63
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
Modbus
Address
6664 …6799 Reserved
Kinetix 3
Parameter
Group 9 - Reserved
Modbus
Address
6800…6999 Reserved
Kinetix 3
Parameter
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 19
Page 20
Chapter 1 Modbus Protocol
Group 10 – Index Acceleration
Modbus
Address
7000 In10.00.Lo 7032 In10.16.Lo 7064 In10.32.Lo 7096 In10.48.Lo
7001 In10.00.Hi 7033 In10.16. Hi 7065 In10.32. Hi 7097 In10.48. Hi
7002 In10.01.Lo 7034 In10.17.Lo 7066 In10.33.Lo 7098 In10.49.Lo
7003 In10.01.Hi 7035 In10.17. Hi 7067 In10.33. Hi 7099 In10.49. Hi
7004 In10.02.Lo 7036 In10.18.Lo 7068 In10.34.Lo 7100 In10.50.Lo
7005 In10.02.Hi 7037 In10.18. Hi 7069 In10.34. Hi 7101 In10.50. Hi
7006 In10.03.Lo 7038 In10.19.Lo 7070 In10.35.Lo 7102 In10.51.Lo
7007 In10.03.Hi 7039 In10.19. Hi 7071 In10.35. Hi 7103 In10.51. Hi
7008 In10.04.Lo 7040 In10.20.Lo 7072 In10.36.Lo 7104 In10.52.Lo
7009 In10.04.Hi 7041 In10.20. Hi 7073 In10.36. Hi 7105 In10.52. Hi
7010 In10.05.Lo 7042 In10.21.Lo 7074 In10.37.Lo 7106 In10.53.Lo
7011 In10.05.Hi 7043 In10.21. Hi 7075 In10.37. Hi 7107 In10.53. Hi
7012 In10.06.Lo 7044 In10.22.Lo 7076 In10.38.Lo 7108 In10.54.Lo
7013 In10.06.Hi 7045 In10.22. Hi 7077 In10.38. Hi 7109 In10.54. Hi
7014 In10.07.Lo 7046 In10.23.Lo 7078 In10.39.Lo 7110 In10.55.Lo
7015 In10.07.Hi 7047 In10.23. Hi 7079 In10.39. Hi 7111 In10.55. Hi
7016 In10.08.Lo 7048 In10.24.Lo 7080 In10.40.Lo 7112 In10.56.Lo
7017 In10.08.Hi 7049 In10.24. Hi 7081 In10.40. Hi 7113 In10.56. Hi
7018 In10.09.Lo 7050 In10.25.Lo 7082 In10.41.Lo 7114 In10.57.Lo
7019 In10.09.Hi 7051 In10.25. Hi 7083 In10.41. Hi 7115 In10.57. Hi
7020 In10.10.Lo 7052 In10.26.Lo 7084 In10.42.Lo 7116 In10.58.Lo
7021 In10.10.Hi 7053 In10.26. Hi 7085 In10.42. Hi 7117 In10.58. Hi
7022 In10.11.Lo 7054 In10.27.Lo 7086 In10.43.Lo 7118 In10.59.Lo
7023 In10.11.Hi 7055 In10.27. Hi 7087 In10.43. Hi 7119 In10.59. Hi
7024 In10.12.Lo 7056 In10.28.Lo 7088 In10.44.Lo 7120 In10.60.Lo
7025 In10.12.Hi 7057 In10.28. Hi 7089 In10.44. Hi 7121 In10.60. Hi
7026 In10.13.Lo 7058 In10.29.Lo 7090 In10.45.Lo 7122 In10.61.Lo
7027 In10.13.Hi 7059 In10.29. Hi 7091 In10.45. Hi 7123 In10.61. Hi
7028 In10.14.Lo 7060 In10.30.Lo 7092 In10.46.Lo 7124 In10.62.Lo
7029 In10.14.Hi 7061 In10.30. Hi 7093 In10.46. Hi 7125 In10.62. Hi
7030 In10.15.Lo 7062 In10.31.Lo 7094 In10.47.Lo 7126 In10.63.Lo
7031 In10.15.Hi 7063 In10.31. Hi 7095 In10.47. Hi 7127 In10.63. Hi
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
Modbus
Address
7128 …7199 Reserved
Kinetix 3
Parameter
20 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 21
Modbus Protocol Chapter 1
Group 11 – Index Deceleration
Modbus
Address
7200 In11.00.Lo 7232 In11.16. Lo 7264 In11.32.Lo 7296 In11.48.Lo
7201 In11.00.Hi 7233 In11.16. Hi 7265 In11.32. Hi 7297 In11.48. Hi
7202 In11.01.Lo 7234 In11.17.Lo 7266 In11.33.Lo 7298 In11.49.Lo
7203 In11.01.Hi 7235 In11.17. Hi 7267 In11.33. Hi 7299 In11.49. Hi
7204 In11.02.Lo 7236 In11.18.Lo 7268 In11.34.Lo 7300 In11.50.Lo
7205 In11.02.Hi 7237 In11.18. Hi 7269 In11.34. Hi 7301 In11.50. Hi
7206 In11.03.Lo 7238 In11.19.Lo 7270 In11.35.Lo 7302 In11.51.Lo
7207 In11.03.Hi 7239 In11.19. Hi 7271 In11.35. Hi 7303 In11.51. Hi
7208 In11.04.Lo 7240 In11.20.Lo 7272 In11.36.Lo 7304 In11.52.Lo
7209 In11.04.Hi 7241 In11.20. Hi 7273 In11.36. Hi 7305 In11.52. Hi
7210 In11.05.Lo 7242 In11.21.Lo 7274 In11.37.Lo 7306 In11.53.Lo
7211 In11.05.Hi 7243 In11.21. Hi 7275 In11.37. Hi 7307 In11.53. Hi
7212 In11.06.Lo 7244 In11.22.Lo 7276 In11.38.Lo 7308 In11.54.Lo
7213 In11.06.Hi 7245 In11.22. Hi 7277 In11.38. Hi 7309 In11.54. Hi
7214 In11.07.Lo 7246 In11.23.Lo 7278 In11.39.Lo 7310 In11.55.Lo
7215 In11.07.Hi 7247 In11.23. Hi 7279 In11.39. Hi 7311 In11.55. Hi
7216 In11.08.Lo 7248 In11.24.Lo 7280 In11.40.Lo 7312 In11.56.Lo
7217 In11.08.Hi 7249 In11.24. Hi 7281 In11.40. Hi 7313 In11.56. Hi
7218 In11.09.Lo 7250 In11.25.Lo 7282 In11.41.Lo 7314 In11.57.Lo
7219 In11.09.Hi 7251 In11.25. Hi 7283 In11.41. Hi 7315 In11.57. Hi
7220 In11.10.Lo 7252 In11.26.Lo 7284 In11.42.Lo 7316 In11.58.Lo
7221 In11.10.Hi 7253 In11.26. Hi 7285 In11.42. Hi 7317 In11.58. Hi
7222 In11.11.Lo 7254 In11.27.Lo 7286 In11.43.Lo 7318 In11.59.Lo
7223 In11.11.Hi 7255 In11.27. Hi 7287 In11.43. Hi 7319 In11.59. Hi
7224 In11.12.Lo 7256 In11.28.Lo 7288 In11.44.Lo 7320 In11.60.Lo
7225 In11.12.Hi 7257 In11.28. Hi 7289 In11.44. Hi 7321 In11.60. Hi
7226 In11.13.Lo 7258 In11.29.Lo 7290 In11.45.Lo 7322 In11.61.Lo
7227 In11.13.Hi 7259 In11.29. Hi 7291 In11.45. Hi 7323 In11.61. Hi
7228 In11.14.Lo 7260 In11.30.Lo 7292 In11.46.Lo 7324 In11.62.Lo
7229 In11.14.Hi 7261 In11.30. Hi 7293 In11.46. Hi 7325 In11.62. Hi
7230 In11.15.Lo 7262 In11.31.Lo 7294 In11.47.Lo 7326 In11.63.Lo
7231 In11.15.Hi 7263 In11.31.Hi 7295 In11.47. Hi 7327 In11.63. Hi
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parame ter
Modbus
Address
7328 …7399 Reserved
Kinetix 3
Parameter
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 21
Page 22
Chapter 1 Modbus Protocol
Group 12 – Next Index
Modbus
Address
7400 In12.00 7416 In12.16 7432 In12.32 7448 In12.48
7401 In12.01 7417 In12.17 7433 In12.33 7449 In12.49
7402 In07.02 7418 In12.18 7434 In12.34 7450 In12.50
7403 In12.03 7419 In12.19 7435 In12.35 7451 In12.51
7404 In12.04 7420 In12.20 7436 In12.36 7452 In12.52
7405 In12.05 7421 In12.21 7437 In12.37 7453 In12.53
7406 In12.06 7422 In12.22 7438 In12.38 7454 In12.54
7407 In12.07 7423 In12.23 7439 In12.39 7455 In12.55
7408 In12.08 7424 In12.24 7440 In12.40 7456 In12.56
7409 In12.09 7425 In12.25 7441 In12.41 7457 In12.57
7410 In12.10 7426 In12.26 7442 In12.42 7458 In12.58
7411 In12.11 7427 In12.27 7443 In12.43 7459 In12.59
7412 In12.12 7428 In12.28 7444 In12.44 7460 In12.60
7413 In12.13 7429 In12.29 7445 In12.45 7461 In12.61
7414 In12.14 7430 In12.30 7446 In12.46 7462 In12.62
7415 In12.15 7431 In12.31 7447 In12.47 7463 In12.63
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
Modbus
Address
Kinetix 3
Parameter
Modbus
Address
7464 …7599 Reserved
Kinetix 3
Parameter
22 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 23
Modbus Protocol Chapter 1
IMPORTANT
Save Parameters
When the Standard and Indexing parameters are written by using function code
0x06, their values are stored to the volatile RAM temporarily and are lost after
powering off. To permanently store the parameters values in the nonvolatile flash
memory, write a 1 to the address 9999, by using the function code 0x06, 0x10.
Nonvolatile memory is limited to 100,000 erase/program cycles.
Modbus Address Data Status Description
9999 (decimal) 1 Write data into nonvolatile memory
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 23
Page 24
Chapter 1 Modbus Protocol
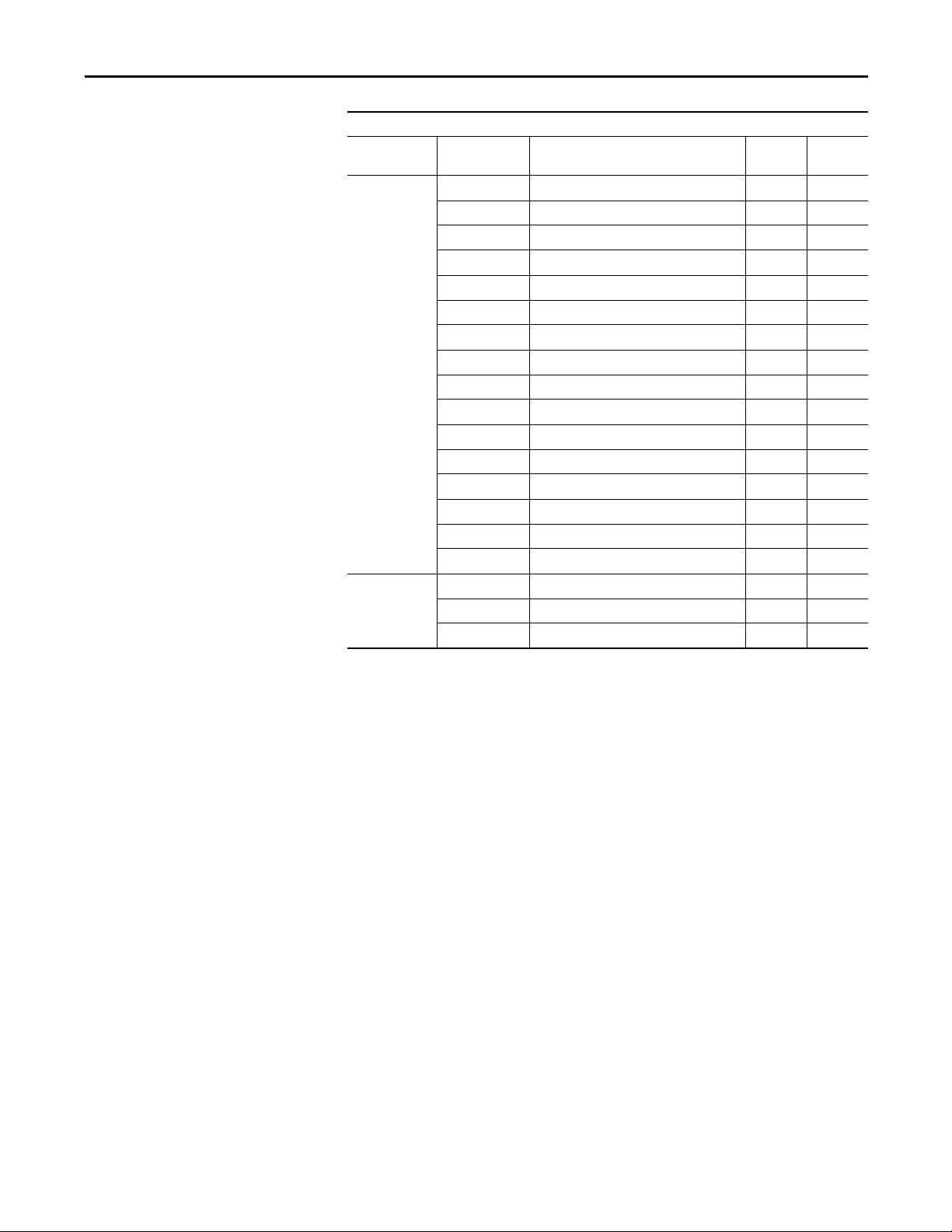
Monitoring Parameter (Function Code 0x04)
The Read or Multi-read of monitoring variables are possible through function
code 04 Read Input Register. All display parameters of the drive are mapped to
function code 04 range. The default address is 0x00.
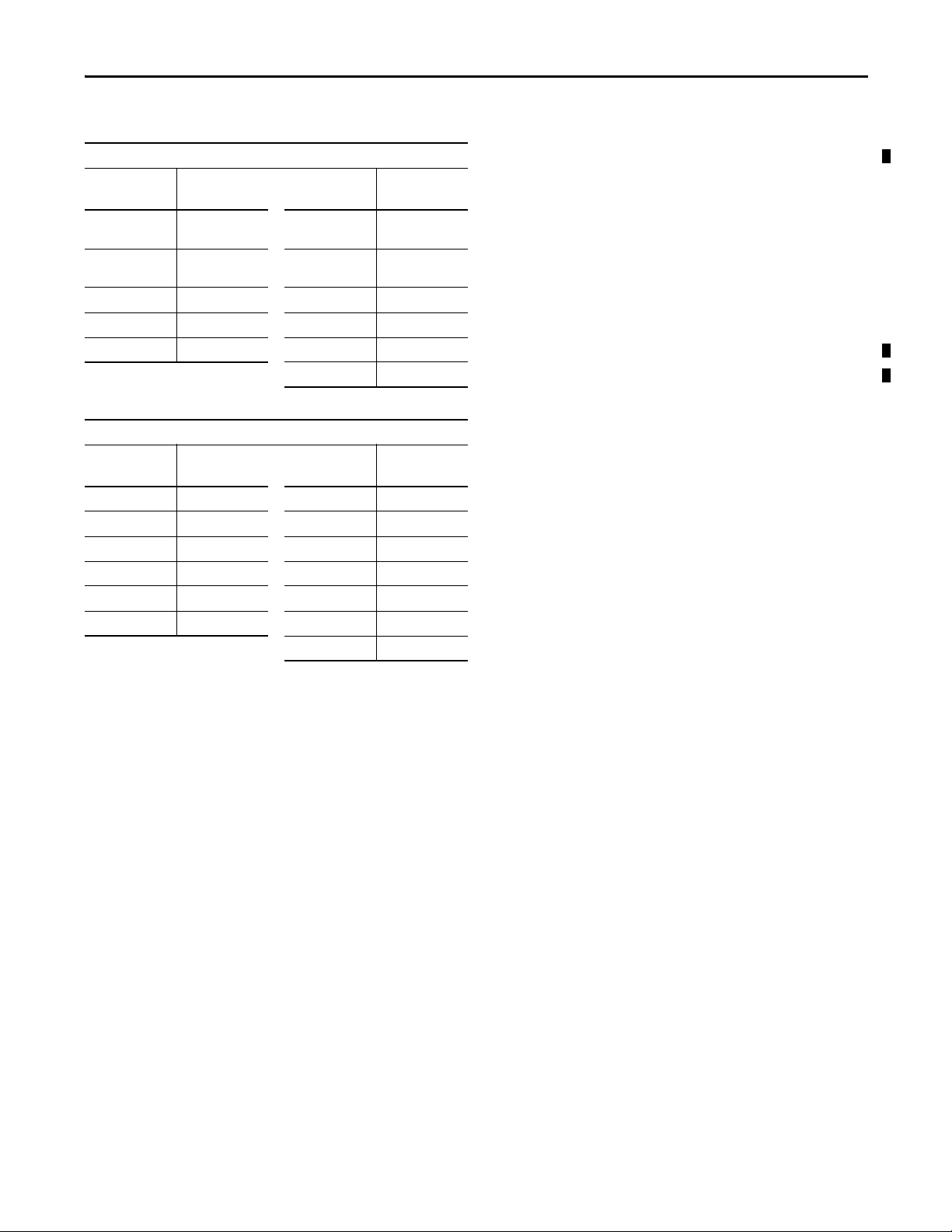
Display Parameter - Input Registers (Default = 0)
Modbus Address Drive Name Unit
0 dis-00 Velocity Feedback rpm
1 dis-01 Velocity Command rpm
2 dis-02 Velocity Error rpm
3 dis-03 Torque Command 0.10%
4…5 dis-04 Position Feedback counts
6…7 dis-05 Position Command counts
8…9 dis-06 Position Error counts
10 dis-07 Pulse Command Frequency 0.1pps
11 dis-08 Electrical Angle 0.1'
12 dis-09 Mechanical Angle 0.1'
13 dis-10 Regeneration Load Ratio %
14 dis-11 DC-Link Voltage V
15 dis-12 Multi-Turn Data Turn number
16…17 dis-13 Offset in Velocity Command 0.1mV
18…19 dis-14 Torque Offset 0.1mV
20…24 dis-15 Input/Output Signal Status ?-
25…32 dis-16 Display Error History 8Alarm
33 dis-17 Display Software Version 1word
34…35 dis-18 Display Motor info 2word
36 dis-19 Analog Velocity Command Voltage 0.01V
37 dis-20 Analog Current Command Voltage 0.01V
38 dis-21 Drive Rated Output Power 1word
39…40 dis-22 Absolute Single Turn Data ?-
41…42 dis-23 Encoder Feedback Counter counts
43…99 Reserved - -
Fault and Warning Status Parameter - Input Registers
Fault and Warning Status Parameter - Input Registers (Default = 0)
Modbus Address Function Name Unit
100 Error Ch eck Ser vo Error Code Word
101 Warni ng Ch eck Se rvo War ning Code Wo rd
102…199 Reserved - -
24 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 25
Output Function Status Parameter
Modbus Protocol Chapter 1
Modbus
Address
200 /S_ALM Alarm Bit [0]
201 /O_ISEL0 Index Select 0 Out Bit [0]
Output Function Description Unit Position
/P-COM Within position window Bit [1]
/TG-ON Up to speed Bit [2]
BK Brake control Bit [3]
/V-COM Within Speed window Bit [4]
/A-VLD Absolute position valid Bit [5]
/RDY Drive Ready Bit [6]
/T-LMT /NEAR Current Limited Bit [7]
/V-LMT /WARN Velocity Limited Bit [8]
/NEAR Near position Bit [9]
/WARN Warning Bit [10]
Reserved - Bit [11]
Reserved - Bit [12]
/IMO In Motion Bit [13]
/I-DW In Dwell Bit [14]
/HOMC Axis Homed Bit [15]
/O_ISEL1 Index Select 1 Out Bit [1]
/O_ISEL2 Index Select 2 Out Bit [2]
/O_ISEL3 Index Select 3 Out Bit [3]
/O_ISEL4 Index Select 4 Out Bit [4]
/O_ISEL5 Index Select 5 Out Bit [5]
/E_SEQU End of Sequence Bit [6]
Reserved - Bit [7…15]
[bits]
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 25
Page 26
Chapter 1 Modbus Protocol
Running Parameter (Function Code 0x06 or 0x10)
Run Parameter - Holding Registers (Default = 2000)
Modbus
Address
2000 User Open run-00 Jog Operation 1-byte
2001 run-01 Off-Line Auto Tuning 1 bit
2002 run-02 Reserved -
2003 run-03 Auto Adjustment of Speed Command
2004 run-04 Auto Adjustment of Current
2005…2007 run-05… run-07 Reserved -
2008 run-08 Alarm Reset 1 bit
2009 run-09 Reserved -
2010 run-10 Absolute Encoder Reset 1 bit
2011 run-11 2-Group Gain Storing 1 bit
2012 run-12 Parameter Initialization 1 bit
2013…2015 run-13…run-15 Reserved -
2016 run-16 Hardware Reset 1 bit
20 17 …2 09 9 ru n- 17 …ru n- 99 R ese r ved -
Attribute RUN Name Access Unit
1 bit
Offset
1 bit
Command Offset
Input Function Parameter (Function Code 0x03, 0x06, or 0x10)
Input Function Control - Holding Registers
Modbus
Address
3000 /SV-ON Drive Enable bit 0
I/O Function Description Unit Position
- Reserved - [1] and [2]
/P-CON Integrator Inhibit bit [3]
/A-RST Fault Reset bit [4]
/N-CL Negative Current Limit bit [5]
/P-CL Positive Current Limit bit [6]
/C-SEL Operation Mode Override bit [7]
/C-DIR Preset Direction bit [8]
/C-SP1 Preset Select 1 bit [9]
/C-SP2 Preset Select 2 bit [10]
/C-SP3 Preset Select 3 bit [11]
/C-SP4 Preset Select 4 bit [12]
/INHIB Pause Follower bit [13]
/G-SEL Alternate Gain Select bit [14]
/PCLR Position clear bit [15]
Bit
26 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 27
Modbus Protocol Chapter 1
Input Function Control - Holding Registers
Modbus
Address
3001 /ABS-DT Position Strobe bit [0]
3002 /START_I Start Index bit [0]
I/O Function Description Unit Position
/START Motor Moving Enable bit [1]
/Z-CLP Zero Speed Clamp Enable bit [2]
/GEAR 2nd Electronic Gear Bank Select ion bit [3]
/R-ABS Reset multi-turn data of Absolute Encoder bit [4]
- Reserved - [5]
/SHOME Start Homing bit [6]
/STOP Stop Indexing bit [7]
/PAUSE Pause Indexing bit [8]
/I-SEL0 Index Select 0 Input bit [9]
/I-SEL1 Index Select 1 Input bit [10]
/I-SEL2 Index Select 2 Input bit [11]
/I-SEL3 Index Select 3 Input bit [12]
/I-SEL4 Index Select 4 Input bit [13]
/I-SEL5 Index Select 5 Input bit [14]
/H_STOP Stop Homing bit [15]
/BANK_SEL Gain Bank Select bit [1]
- Reserved - [2…15]
Bit
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 27
Page 28

Chapter 1 Modbus Protocol
Notes:
28 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 29
Communication Protocol (RS-232/ASCII)
Chapter 2
Introduction
Special Symbols
The drive command protocol is a client-server protocol. A host computer is the
server, and each drive is a client. This chapter provides details about the Special
Symbols, Packet Structure, and Checksum in the serial communication protocol.
Special symbols used in the host commands include the following.
Symbol Value Description
STX 0x02 Start of text
ETX 0x03 End of text
ACK 0x06 A cknowle dged
BEL 0x07 Acknowledge alarm
NAK 0x15 Not acknowledged
CAN 0x18 Cancellation of command (For example, the drive sends CAN if the drive is already enabled,
but the JOG ON is requested.)
ETB 0x17 End of block
GS 0x1D Cannot save parameter
RS 0x1E Range over
US 0x1F Undefined
Packet Structure
Start ID Host/
Symbol STX dd # or $ SET or… d …d : c c ETX
Bytes 1 2 1 3 0 - n 1 1 1
The packet structure is shown below.
Command D ata Separator Checksum End
Response
Some simple commands might not have the Data field (for example, Fault Reset).
Maximum packet size is 400 bytes. Each letter and digit in Command and Data
fields represents a single ASCII character.
All commands begin with an STX
, and terminate with an ETX.
If the drive receives the command without a communication error, the response is
in the same format as the host command. Numeric parameters are encoded as
strings.
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 29
Page 30
Chapter 2 Communication Protocol (RS-232/ASCII)
If the drive receives the host's command with a communication error (for
example, parity or checksum errors), the drive sends an NAK
. The host should
assume a communication error occurred if a response from the drive does not
occur within a time-out period (generally 200 ms).
Checksum
If drive does not recognize the command, it sends a US
The checksum range consists of ID to Separator fields. Checksum is the ASCII
response.
hex code of the least significant digit from the sum of hexadecimal codes in the
checksum range.
For example, this VER command has a checksum of 42 (ASCII hex code of B).
Command STX01#VER: BETX
ASCII 2 3031235645523A423
30H+31H+23H+56H+45H+52H+3AH = 1ABH
The ASCII hex code of B is 42.
However, this VER command response also has a checksum of 35 (ASCII hex
code of 5).
Command STX01&VER 9. 02: 5ETX
ASCII 2 30312456455220392E30323A353
30H+31H+24H+56H+45H+52H+20H+31H+2EH+30H+32H+3AH = 295H
The ASCII hex code of 5 is 35.
30 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 31

Chapter 3
General Commands (ASCII)
This chapter defines the general ASCII commands available to control a
Kinetix 3 drive.
Read Parameter (SET)
Attribute Value
Command SET
Description Read parameter value
Format STX ID # SET PPP : BSS ETX
Data Argument Description
PPP Parameter #; for example, [Pr - 2.03]
Refer to this chapter, Appendix A
and Appendix B, Indexing Drive Parameters for a available
parameter descriptions.
Response Format STX ID $SET V : BSS ETX
Response Data Argument Description
V Bit-field type = 4-byte hexadecimal value.
Integer type = Signed integer of variable length
, PPP=203=0x0CB
, Standard Drive Parameters,
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 31
Page 32

Chapter 3 General Commands (ASCII)
Write Parameter (STR)
Attribute Value
Command STR
Description Write parameter value to RAM, and then save data from RAM to nonvolatile memory.
Format STX ID # STR PPP V : BSS ETX
Data Argument Description
PPP Parameter #; for example, [Pr - 2.03]
Refer to Standard Drive Parameters
description of available parameters.
Group 7 - Manufacturing Settings are product settings that are
programmed during manufacturing.
V Bit-field type = 4-byte hexadecimal value.
Normal type = Signed integer o f variable length
Response Format ACK
Error Response If the drive is unable to change the variable because it is enabled, it sends GS. If the value
is out of range, RS is returned.
Next Command STX ID # STR : BSS ETX
Usage Note To determine whether task is complete, send STR without a rguments.
Response Format If task is not complete: STX ID $BSY : BSS ETX
or
If task is complete: STX ID $TOK : BSS ETX
, PPP=203=0x0CB
beginning on page 47 for a
Write Parameter (CHP)
Attribute Value
Command CHP
Description Write parameter value to RAM
Format STXID#CHP PPP V:BSS ETX
Data Argument Description
PPP Parameter #; for example, [Pr - 2.03]
Refer to Standard Drive Parameters
description of available parameters.
Group 7 - Manufacturing Settings are product settings that are
programmed during manufacturing.
V Bit-field type = 4-byte hexadecimal value.
Normal type =Signed integer of variable length
Response Format ACK
Error Response If unable to change the variable because drive is enabled, GS is sent. If value is out of
range, RS is return ed.
, PPP=203=0x0CB
beginning on page 47 for a
32 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 33

General Commands (ASCII) Chapter 3
Indexing Command Extended (XCE)
Attribute Value
Command XCE
Description Execute Indexing Control Panel command
Format STX ID # XCE NNNNN & VVVVV: BSS ETX
Data Argument Description
NNNNN Index number. 0…63.
Data Format 16-bit unsigned integer
VVVVVV Indexing Function Command.
0 = Start Homing
1 = Stop Homing
2 = Start Indexing
Data Format 16-bit unsigned integer
Response Format ACK
If there is an error while executing the command, the GS
code s can be used for the response.
Usage Note This command executes only Indexing commands.
If the command to be executed is not specific to an Index number, the NNNNN field should
be 0.
, RS, US, NAK, CAN exception
Read Indexing Parameter (XET)
Attribute Value
Command XET
Description Read parameter value
Format STX ID # XET PPPP : BSS ETX
Data Argument Description
PPPP Parameter #; for example, in the case of [IN00.02]
PPPP=0200, the two initial arguments (PPxx) indicate the
indexing (Ix) group.
Refer to Indexing Drive Parameters
description of available indexing parameters.
Group 7 - Manufacturing Settings are product settings that are
programmed during manufacturing.
Response Format STX ID $XET V : BSS ETX
Response Data Argument Description
V Bit-field type = 4-byte hexadecimal value.
Integer type: Signed integer of variable length
,
beginning on page 113 for a
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 33
Page 34

Chapter 3 General Commands (ASCII)
Write Indexing Parameter (XHP)
Attribute Value
Command XHP
Description Write parameter value to RAM.
Format STX ID # XHP PPPP V : BSS ETX
Data Argument Description
PPPP Parameter #; for example, in the case of [IN00.02]
V Bit-field type = 4-byte hexadecimal value.
Response Format ACK
Error Response If the drive is unable to change the variable because it is enabled, it sends GS. If the value
is out of range, RS is returned.
PPPP=0200, the two initial arguments (PPxx) indicate the
indexing (Ix) group.
Refer to Indexing Drive Parameters
description of available indexing parameters.
Normal type = Signed integer of variable length
beginning on page 113 for a
,
Write Indexing Parameter (XTR)
Attribute Value
Command XTR
Description Write parameter value to RAM, and then saves data from RAM to nonvolatile memory
Format STX ID # XTR PPPP V : BSS ETX
Data Argument Description
PPPP Parameter #; In the case of PPPP=0200, the two initial
V Bit-field type = 4-byte hexadecimal value.
Response Format ACK
Error Response If the drive is unable to change the variable because it is enabled, it sends GS. If the value
is out of range, RS is returned.
arguments (PPxx) indicate the indexing (Ix) group.
Refer to Indexing Drive Parameters
description of available indexing parameters.
Normal type = Signed integer of variable length
beginning on page 113 for a
34 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 35

General Commands (ASCII) Chapter 3
Fault Reset (RST)
Attribute Value
Command RST
Description Clear fault
Format STX ID # RST : BSS ETX
Response ACK
Usage Note Fault Reset had no effect unless action was taken to resolve the fault.
Refer to Warnings and Fault Codes
warnings.
beginning on page 129 for a description of faults and
Monitor Variable (MDM)
Attribute Value
Command MDM
Description Monitor variables
Format STX ID # MDM P1 P2 P3 P4 P5 : BSS ETX
Data Argument Description
P1…P5 Variables to monitor.
Usage Note MDM command can monitor up to five variables. Refer to Monitor Variables on page 131
Response Format STX ID $ MDM V1&V2&V3&V4&V5 : BSS ETX
Response Data Argument Description
for the list of variables.
V1…V5 Variable values are 4 or 8-bytes signed
See tables below for descriptions of s pecific variables.
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 35
Page 36

Chapter 3 General Commands (ASCII)
Triggered Data Collection (MOT)
Attribute Value
Command MOT
Description Sets, watches, and reads trigger monitor
Format STX ID # MOT Ch1 Ch2 Src SP Num Mode Pos Level : BSS ETX
Data Argument Description
Ch1, Ch2 Input signals, See Appendix A
(variables 0x00…0x0F only)
Src Trigger Source (0x000…0x009, 0x101…0x112)
Refer to Monitor Variables on page 131 for the list of variables.
0x101-0x10A: DI#1…DI#10
0x10B: Emergency Stop Input
0x10C-0x10E: DO#1…DO#3
0x10F: Safety Alarm Output
0x110-0x112: DO#4…DO#6
SP Sample Period, Range 0x01…0x64 (0.2…20ms)
Num Number of data points *10, Range 0x01…0x1E (1…30)
Mode Trigger mode
1 = Positive Edge
2 = Negative Edge
Pos Tri gger Position (1…9)
The percentage of data to be received before the trigger point.
For example, if Pos = 3 then 30% of data received before the
trigger point and 70% of data received after the trigger point.
Level Trigger level/threshold; the value of the Trigger Source. Values
are 4 or 8-bytes signed.
Usage Note This command is sent to the drive prior to monitoring or reading the Triggered Data
Collection (MOT) command variants below. See Figure 1
Response ACK
Next Command MOT
Format STX ID # MOT: BSS ETX
Usage Note This command is sent to the drive to verify data is available.
Response If data is not ready: STX ID $ BSY : BSS ETX
If data is ready: STX ID $ TOK : BSS ETX
Next Command MOT
Format STX ID # MOT NumD : BSS ETX
Data Argument Description
NumD Data Point to retrieve the data from; Range 00…(Num-1)
Usage Note This command can be used when previous command returned TOK.
Send ESC to stop data collection.
Response Format STX ID $ MOT V1&V2&...V20 : BSS ETX
Response Data Argument Description
V1…V20 Data transmission is done in blocks of 10.
Because there are 2 channels, 20 values are returned, with values
alternating between the first channel and the second channel.
Values are a signed integer of variable length (4 or 8-bytes).
for command examples.
36 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 37

General Commands (ASCII) Chapter 3
#MOR (setting)
ACK
#MOT
$BSY
#MOT
$TOK
#MOT00
$MOT
PC Servo
Time <200 ms
.
.
.
#MOT29
$MOT
#ESC
ACK
.
.
.
Attribute Value
Next Command STX ID # ESC : BSS ETX
Response ACK
Figure 1 - Triggered Data Collection (MOT) Command String Example
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 37
Page 38

Chapter 3 General Commands (ASCII)
#MOR (setting)
ACK
#MOR
$MOR
#MOR
$MOR
#ESC
ACK
PC Servo
Time <200 ms
.
.
.
Variable Roll Monitoring (MOR)
Attribute Value
Command MOR
Description Set up variable roll monitor
Form at
Data
Usage Note Sets up the variable roll monitoring. This command is sent to the drive prior to sending a
Response ACK
Next Command STX ID # MOR : BSS ETX
Usage Note Request to store data in the linear buffer (with a capacity of 100 data points). If the buffer
Response Format STXID$MORV1&V2&…Vn:BSSETX
Response Data Argument Description
Next Command STX ID #ESC : BSS ETX
Usage Note Send ESC to stop monitoring of the data.
Response ACK
STX ID # MOR SP P1 P2 : BSS ETX
Argument Description
SP Sampling period range 0x01…0x64 (01…100 ms)
P1, P2 Variables to monitor. Range 0x00…0x1D
Monitor Variable (MDM)
is full and data has not been retrieved, the buffer is emptied. If data is requested before
data is in the buffer, the drive sends ACK.
V1…Vn Signed integer of variable length
command. See Figure 2 for command examples.
Figure 2 - Variable Roll Monitoring (MOR) Command String Example
38 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 39

General Commands (ASCII) Chapter 3
#TAT (setting)
ACK
#TAT
$BSY
#TAT
$TOK
PC Servo
Time <200 ms
.
.
.
Automatic Task (TAT)
Attribute Value
Command TAT
Format STX ID # TAT T1 : BSS ETX
Data Argument Description
T1 Automatic task number. See the following Values and Task
Descriptions.
Value Task Description
0x01 Auto Tuning
0x02 Move to Marker
0x03 Auto Adjustment of Velocity Command Offset
0x04 Auto Adjustment of Current Command Offset
0x07 Auto Adjustment of Current Feedback Offset
Response ACK
Usage Note Send TAT command without arguments to find out if a task is completed. See Figure 3
command examples.
Next Command STX ID # TAT : BSS ETX
Response Format STX ID $ BSY : BSS ETX - if task is not complete
STX ID $ TOK : BSS ETX - task is complete
for
Figure 3 - Automatic Task (TAT) Command String Example
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 39
Page 40

Chapter 3 General Commands (ASCII)
#TMN (setting)
ACK
#TMN
$BSY
#TMN
$TOK
PC Servo
Time <200 ms
.
.
.
Manual Task (TMN)
Attribute Value
Command TMN
Format STXID#TMN1: BSSETX
Data Argument Description
T1 Manual task number. See the following Values and Task
Response ACK
Usage Note Most manual tasks are complete by the time ACK is received. Commands 0x03 and 0x06
may take longer, because they save data to nonvolatile memory. Send TMN command
without arguments to find out if a task is completed. See Figure 4
Next Command STX ID # TAT : BSS ETX
Response Format STX ID $ BSY : BSS ETX - if task is not complete
STX ID $ TOK : BSS ETX - task is complete
Descriptions.
Value Task Description
0x01 - Speed Command Offset - Decrement by
0.1 mV.
0x02 + Speed Command Offset - Increment by
0.1 mV.
0x03 Save Speed Command Offset change.
0x04 - Current Command Offset - Decrement by
0.1 mV.
0x05 + Current Command Offset - Increment by
0.1 mV.
0x06 Save Current Command Offset change.
0x07 Discard changes and exit.
for command examples.
Figure 4 - Manual Task (TMN) Command String Example
40 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 41

General Commands (ASCII) Chapter 3
Read Fault Contents (EHY)
Attribute Value
Command EHY
Description Read faults
See Read Fault Detailed Data (DIE) on page 44
Format STX ID # EHY F1 : BSS ETX
Data Argument Description
F1 Fault Number. Range is 0x01…0x08
where latest fault status is stored in 0x01, and oldest fault is
stored in 0x08.
Response Format STX ID $ EHYE FCode FChars : BSS ETX
Data Data Description
FCode Fault Code. See Appendix C
FChars Fault Name Abbreviated. See Appendix C
Usage Note Use this command to f ind out more about one of the eight faults.
To receive all fault statuses, use EHY * command below.
for alternative fault data.
for a list of fault codes.
.
Attribute Value
Command EHY *
Description Read all fault codes
Format STX ID # EHY * : BSS ETX
Data Argument Description
* Asterik (*) means all faults
Response Format STX ID $ EHY Fcode1&Fcode2&...Fcode8 : BSS ETX
Data Data Description
Fcode1…Fcode8 Fault Code. See Appendix C
for a list of fault codes.
Jog (JOG)
Attribute Value
Command JOG
Description Jog for ward or reverse
Format STX ID # JOG P1 : BSS ETX
Data Argument Description
P1 0 = prepare for jog operation
Response ACK
Usage Note To keep jogging, send JOG command more than once within 500 ms.
To end Jog mode, send SVROF
+ = jog forward
- (dash) = jog reverse
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 41
Page 42

Chapter 3 General Commands (ASCII)
Read Drive Status (STS)
Attribute Value
Command STS
Description Read status
Format STX ID # STS : BSS ETX
Response Format STX ID $ STS Mode S1 S2 S3 S4 S5 SS FChars : BSS ETX
Response Data Arguments Description
Mode One of these operating modes
F = Follower mode
S = Analog Velocity mode
P = Preset Velocity mode
C = Analog Current mode
D = Dual Current Com mand mode
PF, PS, PC FS, FC, SC = Mixed modes
Refer to [Pr - 0.00], Operations Mode on page 48
information.
S1 S1 means:
In Follower mode:
1 = In Position
0 = Not In Position
In Analog Velocity or Preset Velocity modes:
1 = In Speed Window
0 = not In Speed Window
If position or speed data is not available S1= 0.
S2 One of the following:
1 = Up to Speed
0 = Not Up to Speed
If speed data is not available, S2=0.
S3 One of the following:
1 = Drive is Enabled
0 = Drive is Disabled
S4 One of the following:
1 = Positive Overtravel is active
0 = Positive Overtravel is inactive
S5 One of the following:
1 = Negative Overtravel is active
0 = Negative Overtravel is inactive
SS One of the following:
Edd = fault occurred (See Appendix C
dd = 2-byte error code, 0x00…0xFF
Wdd = warning occurred (See Appendix C
dd = 2-byte warning code
RDY = no errors or warnings
FChars Abbreviation of the fault/warning name.
In the case of Estop fault, Fchars = ESTOP
FChars size is 5 bytes when fault occurs and 3 bytes when
warning occurs.
for additional
)
)
42 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 43

General Commands (ASCII) Chapter 3
Other Functions (ETC)
Attribute Value
Command ETC
Format STXID#ETCF1: BSSETX
Data Argument Description
F1 Manual task number. See the following Values and Task
Descriptions.
Value Task Description
0x09 Clear Fault History
0x0A Reset Absolute Encoder
0x0B Store 2-Group Gain
0x0C Reset to Factory settings
0x0D Test Run
0x0E Upgrade Firmware
0x0F Erase Manufacturing Information
Response ACK
Usage Note Send ETC command without arguments to find out if a task is completed.
Next Command STX ID # ETC : BSS ETX
Response Format STX ID $ BSY : BSS ETX - if task is not complete
or
STX ID $ TOK : BSS ETX - task is complete
(1)
(2)
(1) Resetting of an a bsolute (17-bit) encoder is possible on ly when the drive is disabled. The command Reset Absolute Encoder sets the
rotation data to 0, and clears all encoder related faults and warnings.
(2) Parameters in the table below are not affected by the Reset to Factory settings.
Parameter Number Description
6.00 Analog Velocity Command Offset
6.01 Analog Current Command Offset
6.02 U Phase Current Sensing Offset
6.03 W Phase Current Sensing Offset
7.00…7.07 Group 7 - Manufacturing Settings
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 43
Page 44

Chapter 3 General Commands (ASCII)
Verify Software Version (VER)
Attribute Value
Command VER
Description Verify software version
Format STX ID # VER : BSS ETX
Response Format STX ID $ VER V : BSS ETX
Response Data Argument Description
V: Firmware version
Size: 5 bytes, including a space
Example: STX01$VER 1.00:BSS ETX
Verify Servo Connection (LIV)
Attribute Value
Command LIV
Description Verify servo connection
Format STX ID # LIV : BSS ETX
Response Format ACK if there is a connection
Read Fault Detailed Data (DIE)
Attribute Value
Command DIE
Description Read detailed fault data stored in [Pr -6.07] Fault Detail Data Selection 1. Sample period
Format STX ID # DIE A1 A2 : BSS ETX
Data Argument Description
Usage Note Send DIE 02 00 to receive all the data for A1= 02.
Response Format STX ID $ DIE D1&D2&...DN : BSS ETX
Error Response STX ID $ DIE FFFF : BSS ETX
Response Data Argument Description
in μs = [Pr - 6.07]
See Read Fault Contents (EHY) on page 41
A1 Channel to get the data for. Range 1…4
A2 Data Number; Range 0…50
Send DIE 00 01 to receive data for data number 1 of 4 variables.
DIE 00 00 is invalid.
means data number is invalid.
D1…Dn Detailed data, where n depends on A1 and A2
* 200.
for alternative fault data.
Channels are stored in [Pr - 6.07]…[Pr - 6.10], Fault Detail
Data Selection 4
0 means all data
If A1=00 and A2 = 01, then n = 4
If A1=01…04 and A2 = 01…50, then n=1
If A1=01…04 and A2 = 00, then n= 50
44 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 45

Enable Drive (SVRON)
Attribute Value
Command SVRON
Description Enables the drive
Format STX ID # SVRON : BSS ETX
Response ACK
Disable Drive (SVROF)
Attribute Value
Command SVROF
Description Disables the drive
Format STX ID # SVROF : BSS ETX
Response ACK
General Commands (ASCII) Chapter 3
Reset Drive (HWR)
Attribute Value
Command HWR
Description Reset the drive by using watchdog counter.
Format STX ID # HWR : BSS ETX
Response ACK
Usage Note Stops the watchdog timer, allowing a hardware signal to reboot (reset) the drive.
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 45
Page 46

Chapter 3 General Commands (ASCII)
Notes:
46 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 47

Appendix A
Standard Drive Parameters
Parameters control Kinetix 3 drive operations. They are grouped by the type of
drive, Standard or Indexing, and the settings they define.
Parameter Groupings
Descriptions of Indexing Drive Parameters begin on page 113
Standard drive parameters are grouped into these drive settings:
• Group 0 - Basic drive system and I/O settings
• Group 1 - Gain and gain tuning settings
• Group 2 - Velocity control settings
• Group 3 - Position control settings
• Group 4 - Torque control settings
• Group 5 - Supplementary drive system and I/O settings
• Group 6 - Supplementary gain settings and fault reports
• Group 7 - Factory default settings
• Group 8 - Parameters reserved
• Group 9 - Motor and drive operating mode parameters
.
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 47
Page 48

Appendix A Standard Drive Parameters
Parameter Descriptions
Parameter descriptions list the size of each parameter and the data options within
the parameter.
Descriptions of Indexing Drive Parameters begin on page 113
.
Group 0 - System Level
[Pr - 0.00] Operations Mode
Ultraware Name Operation Modes (Main/Override)
Range 1…12
Display (Value) Normal operating mode Override operating mode
F (1) Follower Follower
S (2) Analog Velocity Input Analog Velocity Input
C (3) Analog Current Input Analog Current Input
SF (4) Analog Velocity Input Follower
CF (5) Analog Current Input Follower
CS (6) Analog Current Input Analog Velocity Input
P (7) Preset Velocity Preset Velocity
PF (8) Preset Velocity Follower
PS (9) Preset Velocity Analog Velocity Input
PC (10) Preset Velocity Analog Current Input
D (11) Reserved Reserved
I (12) Indexing Indexing
Default 1
When Enabled Ser vo-Off -> Setting -> After power cycle
Applicable Operating Mode All
Modbus Address 0
[Pr - 0.01] Reserved
Reserved for future use.
48 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 49

Standard Drive Parameters Appendix A
55
[Pr - 0.02] Motor Basic Modes
Data Size 4 digits
Digit 0 Fault and Disable Braking
Ultraware Name Stopping Functions: Fault and Disable Braking
Range Value Description
0x0 Brake and hold
0x1 Brake and release
0x2 Free stop
0x3 Free stop and hold
Default 0
Digit 1 Overtravel stop method
Ultraware Name Stopping Functions: Over Travel Stop Method
Range Value Description
0x0 Stop by change of mode to Normal
0x1 Dynamic Brake
Default 0
Digit 2 Motor Forward Dir
Ultraware Name Command Polarity
Range Value Description
0x0 The command signal is not inverted
0x1 The command signal is inverted so
Default 0
Digit 3 Power input
Ultraware Name AC Line Loss Check
Range Value Description
0x0 Enables the following:
0x1 Disable
0x2 Single-phase input
Default 0
When Enabled Servo-Off -> Setting
Applicable Operating Mode All
Modbus Address 3
Current. Set stopping current with
Overtravel Current Limit parameter
[Pr - 4.05]
.
so that a positive command value
results in clockwise rotation, as
viewed from shaft end.
that a positive command value results
in counter-clockwise rotation, as
viewed from shaft end.
• 50…400W drive: Enable singlephase open check
• 800…1.5kW drive: Enable threephase open check
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 49
Page 50

Appendix A Standard Drive Parameters
[Pr - 0.03] Auto Tuning Functions
Data Size 4 digits
Digit 0 Off-line Tuning Mode
Ultraware Name Off-line Tuning Mode
Range Value Description
0x0 Inertia Moment Estimation
0x1 Inertia Moment Estimation and
Resonant Frequency Detection
0x2 Resonance frequency Detection
Default 1
Digit 1 Reserved
Digit 2 Autotuning Speed
Ultraware Name Autotuning Speed
Range 2…9
Default 7
Units rpm/100
Digit 3 Dynamic Tuning Response Speed
Ultraware Name Online Tuning Response
Range Value Description
0x0 Off
0x1 Slowest
0x2 Slower
0x3 Slow
0x4 Medium-Slow
0x5 Medium
0x6 Medium-Fast
0x7 Fast
0x8 Faster
0x9 Fastest
Default 0
Units -
When Enabled Servo-Off -> Setting
Applicable Operating Mode All
Modbus Address 4
50 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 51

Standard Drive Parameters Appendix A
(1)Internal value used for Modbus reading/writing functions(1)Internal value used for Modbus reading/writing functions
[Pr - 0.04] Inertia Ratio
Description Load Inertia / Motor Inertia
Ultraware Name Inertia Ratio
Internal Value
(1)
Display Value
Range 0…6000 0…60.00
Default 100 1.00
Units (Load inertia/Motor inertia)*100 Load inertia/Motor inertia
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 5
(1) Internal value used for Modbus reading/writing functions
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 51
Page 52

Appendix A Standard Drive Parameters
[Pr - 0.05] Auxiliary Function Selection 1
Applicable Operating Mode All
Data Size 4 digits
Digit 0 Encoder Back-up Battery
Ultraware Name Encoder Back-up Battery
Range Value Description
0x0 Battery Installed
0x1 Battery Not Installed
Default 0
Digit 1 Velocity Observer
Ultraware Name Velocity Observer
Range Value Description
0x0 Disable
0x1 Enable
Default 0
Digit 2 Alternative Gain Change Enable
Ultraware Name Gain Change Enable
Range Value Description
0x0 Disable
0x1 Enable
Default 0x0
Digit 3 Emergency stop input
Range Value Description
0x0 Disable
0x1 Enable
Default 0
When Enabled Servo-Off -> Setting -> After power cycle
Applicable Operating Mode All
Modbus Address 6
52 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 53

Standard Drive Parameters Appendix A
[Pr - 0.06] Auxiliary Function Selection 2
Applicable Operating Mode All
Data Size 3 digits
Digit 0 Automatic Motor Identification
Ultraware Name Auto Motor Identificati on
Range Value Description
0x0 Disabled
0x1 Enabled
Default 1
Digit 1 Incremental Feedback Loss (Encoder Line Break Detection)
Ultraware Name Incremental Feedback Loss
Range Value Description
0x0 Monitored
0x1 Ignored
Default 0
Digit 2 Mode of Gain Switching
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 53
Page 54

Appendix A Standard Drive Parameters
[Pr - 0.06] Auxiliary Function Selection 2 (continued)
Range Value Description
0Fixed to the 1st gain
1 Fixed to 2nd gain
2 2nd gain selection when the gain
switching input is turned on.
3 2nd gain selection when the toque
command is larger than the set-up
levels of the gain control switching
and hysteresis of control switching.
4 2nd gain selection when the
command speed is larger than the
set-up levels of the gain control
switching and hysteresis of control
switching.
5 2nd gain selection when the
positional deviation is larger than the
setup set-up levels of the gain control
switching and hysteresis of control
switching.
6 2nd gain selection when more then
one command pulse exist between
200 μs.
7 2nd gain selection when the
positional deviation counter value
exceeds the set-up of the positioning
complete range.
8 2nd gain selection when the motor
actual speed exceeds the set-up
levels of the gain control switching
and hysteresis of control switching).
Switches to the 2nd gain while the
position command exists.
9 Switches to the 1st gain when no -
position command status lasts for the
set up of delay time of gain switching
[x 200 μs] and the speed falls slower
than the set-up levels of the gain
control switching level and hysteresis
of control switching.
Default 0
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 7
54 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 55

[Pr - 0.07] Drive Address
Applicable Operating Mode All
Ultraware Name Drive Address
Range 1…248
Default 248
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 8
[Pr - 0.08] Password
Applicable Operating Mode All
Ultraware Name Drive Password
Range 0…9999
Usage Note. Unprotected Code: 777
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 9
Standard Drive Parameters Appendix A
[Pr - 0.09] Serial Port Configuration
Applicable Operating Mode All
Data Size 4 digits
Digit 0 Baud Rate
Ultraware Name Baud Rate
Range Value Description
0x0 9600 bps
0x1 14400 bps
0x2 19200 bps
0x3 38400 bps
0x4 56000 bps
0x5 57600 bps
Default 0x5 for Ultraware connection
0x2 for 1203-USB connection
Digit 1 Data bits, Parity, Stop bit
Ultraware Name Data bits, Parity, Stop bit
Range Value Description
0x0 8, No, 1
0x1 8, Even, 1
0x2 8, Odd, 1
0x3 8, No, 2
0x4 8, Even, 2
0x5 8, Odd, 2
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 55
Page 56

Appendix A Standard Drive Parameters
[Pr - 0.09] Serial Port Configuration (continued)
Default 0x0
Digit 2 Protocol
Ultraware Name Protocol
Range Value Description
0x0 ASCII
0x1 Modbus-RTU
Default 0 for Ultraware connection
1 for 1203-USB connection
Digit 3 Communication Method
Ultraware Name Communication Method
Range Value Description
0 0x0 RS232
1 Ox1 RS485
Default 0 for Ultraware connection
1 for 1203-USB connection
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 10
[Pr - 0.10] Allocation of Input Signals 1
Range for all digits 0…B, where 0 is Off, B is On and 1…A are digital inputs
Data Size 4 digits
Digit Description Default Unmapped IO
Status
0 Drive enable (SV-ON) 0x1 ON
1 Positive overtravel (P-OT) 0xb ON
2 Negative overtravel (N-OT) 0xb ON
3 Integrator inhibit (CON) 0x4 OFF
When Enabled Ser vo-Off -> Setting
(1)
Applicable Operating Mode All
Modbus Address 11
(1) Refer to Setting Values for Parameters [Pr - 0.10]…[Pr - 0.21] on page 61.
56 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 57

Standard Drive Parameters Appendix A
[Pr - 0.11] Allocation of Input Signals 2
Range for all digits 0…B, where 0 is Off, B is On and 1…A are digital inputs
Data Size 4 digits
Digit Description Default Unmapped IO
Status
0 Fault reset (A-RST) 0x5 OFF
1 Negative current limit (N-TL) 0x6 OFF
2 Positive current limit (P-TL) 0x7 OFF
3 Operation mode override (C-SEL) 0x0 OFF
When Enabled Ser vo-Off -> Setting
(1)
Applicable Operating Mode All
Modbus Address 12
(1) Refer to Setting Values for Parameters [Pr - 0.10]…[Pr - 0.21] on page 61.
[Pr - 0.12] Allocation of Input Signals 3
Range for all digits 0…B, where 0 is Off, B is On and 1…A are digital inputs
Data Size 4 digits
Digit Description Default Unmapped IO
Status
0 Preset direction (C-DIR) 0x0 OFF
1 Preset select 1 (C-SP1) 0x0 OFF
2 Preset select 2 (C-SP2) 0x0 OFF
3 Preset select 3 (C-SP3) 0x0 OFF
When Enabled Ser vo-Off -> Setting
(1)
Applicable Operating Mode All
Modbus Address 13
(1) Refer to Setting Values for Parameters [Pr - 0.10]…[Pr - 0.21] on page 61.
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 57
Page 58

Appendix A Standard Drive Parameters
[Pr - 0.13] Allocation of Input Signals 4
Range for all digits 0…B, where 0 is Off, B is On and 1…A are digital inputs
Data Size 4 digits
Digit Description Default Unmapped IO
Status
0 Zero speed clamp enable (Z-CLP) 0x0 OFF
1 Pause follower (INHIBIT) 0x0 OFF
2 Alternate gain select (G-SEL) 0x0 OFF
3 Position clear (PCLR) 0x0 OFF
When Enabled Ser vo-Off -> Setting
(1)
Applicable Operating Mode All
Modbus Address 14
(1) Refer to Setting Values for Parameters [Pr - 0.10]…[Pr - 0.21] on page 61.
[Pr - 0.14] Allocation of Input Signals 5
Range for all digits 0…B where 0 is Off, B is On, and 1…A are digital inputs
Data Size 4 digits
Digit Description Default Unmapped IO
Status
0 Position strobe (ABS-DT) 0x0 OFF
1 Motor moving enable (START) 0x0 OFF
2 Analog speed command select (C-
0x0 OFF
SP4)
3 2nd electronic gear bank selection
0x0 OFF
(GEAR )
When Enabled Servo-Off -> Setting
(1)
Applicable Operating Mode All
Modbus Address 15
(1) Refer to Setting Values for Parameters [Pr - 0.10]…[Pr - 0.21] on page 61.
58 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 59

Standard Drive Parameters Appendix A
[Pr - 0.15] Allocation of Input Signals 6
Data Size 4 digits
Digit Description Default Unmapped IO
Status
0Reset multi-turn data of absolute
0x0 OFF
encoder (R_ABS)
1 Gain bank select (BANK_SEL) 0x0 OFF
2Reserved 0x0OFF
3Reserved 0x0OFF
When Enabled Servo-Off -> Setting
(1)
Applicable Operating Mode All
Modbus Address 16
(1) Refer to Setting Values for Parameters [Pr - 0.10]…[Pr - 0.21] on page 61.
[Pr - 0.16] Allocation of Input Signals 7
Data Size 4 digits
Digit Description Default Unmapped IO
Status
0 Home sensor (H_SENS) 0x0 OFF
1 Start homing (SHOME) 0x0 OFF
2 Stop indexing (STOP) 0x0 OFF
3 Pause indexing (PAUSE) 0x0 OFF
When Enabled Ser vo-Off -> Setting
(1)
Applicable Operating Mode Indexing
Modbus Address 17
(1) Refer to Setting Values for Parameters [Pr - 0.10]…[Pr - 0.21] on page 61.
[Pr - 0.17] Allocation of Input Signals 8
Data Size 4 digits
Digit Description Default Unmapped IO
Status
0 Index select 0 input (I_SEL0) 0x0 OFF
1 Index select 1 input (I_SEL1) 0x0 OFF
2 Index select 2 input (I_SEL2) 0x0 OFF
3 Index select 3 input (I_SEL3) 0x0 OFF
When Enabled Ser vo-Off -> Setting
(1)
Applicable Operating Mode Indexing
Modbus Address 18
(1) Refer to Setting Values for Parameters [Pr - 0.10]…[Pr - 0.21] on page 61.
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 59
Page 60

Appendix A Standard Drive Parameters
[Pr - 0.18] Allocation of Input Signals 9
Data Size 4 digits
Digit Description Default Unmapped IO
Status
0 Index select 4 input (I_SEL4) 0x0 OFF
1 Index select 5 input (I_SEL5) 0x0 OFF
2 Stop homing (H_STOP) 0x0 OFF
3 Start index (START_I) 0x0 OFF
When Enabled Servo-Off -> Setting
(1)
Applicable Operating Mode Indexing
Modbus Address 19
(1) Refer to Setting Values for Parameters [Pr - 0.10]…[Pr - 0.21] on page 61.
[Pr - 0.19] Allocation of Input Signals 10
Data Size 4 digits
Digit Description Default Unmapped IO
Status
0 Reserved 0x0 OFF
1 Reserved 0x0 OFF
2 Reserved 0x0 OFF
3 Reserved 0x0 OFF
When Enabled Reserved
Applicable Operating Mode Indexing
Modbus Address 20
[Pr - 0.20] Allocation of Input Signals 11
Data Size 4 digits
Digit Description Default Unmapped IO
0 Reserved 0x0 OFF
1 Reserved 0x0 OFF
2 Reserved 0x0 OFF
3 Reserved 0x0 OFF
When Enabled Reserved
Applicable Operating Mode Indexing
Modbus Address 21
60 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Status
Page 61

Standard Drive Parameters Appendix A
[Pr - 0.21] Allocation of Input Signals 12
Data Size 4 digits
Digit Description Default Unmapped IO
Status
0 Reserved 0x0 OFF
1 Reserved 0x0 OFF
2 Reserved 0x0 OFF
3 Reserved 0x0 OFF
When Enabled Reserved
Applicable Operating Mode Indexing
Modbus Address 22
Table 1 - Setting Values for Parameters [Pr - 0.10]…[Pr - 0.21]
Setting Value
Input Channel No. Input
CN1 Pin No. On 26 27 29 9 8 7 6 5 4 3 Off
(1)
B A 9 6 7 6 5 4 3 2 1 0
19 9 8 7 6 5 4 3 2 1 Input
Signal
Signal
(1) Setting values are reserved (not available) for [Pr - 0.19] and [Pr - 0.20].
[Pr - 0.22] Allocation of Output Signals 1
Range for all digits 0…3, where 0 is Off and 1…6 are digital outputs
Data Size 4 digits
Digit Description Default
0 Within position window (P-COM) 0x1
1 Up to speed (TG-ON) 0x2
2Brake control (BK) 0x3
3 Within speed window (V-COM) 0x0
When Enabled Servo-Off -> Setting
(1)
Applicable Operating Mode All
Modbus Address 23
(1) Refer to Setting Values for Parameters [Pr - 0.22]…[Pr - 0.32] on page 66.
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 61
Page 62

Appendix A Standard Drive Parameters
[Pr - 0.23] Allocation of Output Signals 2
Range for all digits 0…3, where 0 is Off and 1…6 are digital outputs
Data Size 4 digits
Digit Description Default
0 Current limited (T_LMT) 0x0
1 Velocity limited (V-LMT) 0x0
2 Near position (NEAR) 0x0
3 Warning (WARN) 0x0
When Enabled Servo-Off -> Setting
(1)
Applicable Operating Mode All
Modbus Address 24
(1) Refer to Setting Values for Parameters [Pr - 0.22]…[Pr - 0.32] on page 66.
[Pr - 0.24] Allocation of Output Signals 3
Range for all digits 0…3, where 0 is Off and 1…6 are digital outputs
Data Size 4 digits
Digit Description Default
0 Absolute position valid (A_VLD) 0x0
1Ready0x0
2 Reserved 0x0
3 Reserved 0x0
When Enabled Servo-Off -> Setting
(1)
Applicable Operating Mode All
Modbus Address 25
(1) Refer to Setting Values for Parameters [Pr - 0.22]…[Pr - 0.32] on page 66.
62 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 63

Standard Drive Parameters Appendix A
[Pr - 0.25] Allocation of Output Signals 4
Range for all digits 0…3, where 0 is Off and 1…6 are digital outputs
Data Size 4 digits
Digit Description Default
0 In Motion (IMO) 0x0
1 In Dwell (I_DW) 0x0
2 Axis Homed (HOMC) 0x0
3 Index Select 0 Out (O_ISEL0) 0x0
When Enabled Servo-Off -> Setting
(1)
Applicable Operating Mode Indexing
Modbus Address 26
(1) Refer to Setting Values for Parameters [Pr - 0.22]…[Pr - 0.32] on page 66.
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 63
Page 64

Appendix A Standard Drive Parameters
[Pr - 0.26] Allocation of Output Signals 5
Range for all digits 0…3, where 0 is Off and 1…6 are digital outputs
Data Size 4 digits
Digit Description Default
0 Index Select 1 Out (O_ISEL1) 0x0
1 Index Select 2 Out (O_ISEL2) 0x0
2 Index Select 3 Out (O_ISEL3) 0x0
3 Index Select 4 Out (O_ISEL4) 0x0
When Enabled Servo-Off -> Setting
(1)
Applicable Operating Mode Indexing
Modbus Address 27
(1) Refer to Setting Values for Parameters [Pr - 0.22]…[Pr - 0.32] on page 66.
[Pr - 0.27] Allocation of Output Signals 6
Range for all digits 0…3, where 0 is Off and 1…6 are digital outputs
Data Size 4 digits
Digit Description Default
0 Index Select 5 Out (O_ISEL5) 0x0
1 End of Sequence (E_SEQU) 0x0
2 Reserved 0x0
3 Reserved 0x0
When Enabled Servo-Off -> Setting
(1)
Applicable Operating Mode Indexing
Modbus Address 28
(1) Refer to Setting Values for Parameters [Pr - 0.22]…[Pr - 0.32] on page 66.
[Pr - 0.28] Allocation of Output Signals 7
Range for all digits 0…3, where 0 is Off and 1…6 are digital outputs
Data Size 4 digits
Digit Description Default
0 Reserved 0x0
1 Reserved 0x0
2 Reserved 0x0
3 Reserved 0x0
When Enabled Reserved
Applicable Operating Mode Indexing
Modbus Address 29
64 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 65

Standard Drive Parameters Appendix A
[Pr - 0.29] Allocation of Output Signals 8
Range for all digits 0…3, where 0 is Off and 1…6 are digital outputs
Data Size 4 digits
Digit Description Default
0 Reserved 0x0
1 Reserved 0x0
2 Reserved 0x0
3 Reserved 0x0
When Enabled Reserved
Applicable Operating Mode Indexing
Modbus Address 30
[Pr - 0.30] Allocation of Output Signals 9
Range for all digits 0…3, where 0 is Off and 1…6 are digital outputs
Data Size 4 digits
Digit Description Default
0 Reserved 0x0
1 Reserved 0x0
2 Reserved 0x0
3 Reserved 0x0
When Enabled Reserved
Applicable Operating Mode Indexing
Modbus Address 31
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 65
Page 66

Appendix A Standard Drive Parameters
[Pr - 0.31] Allocation of Output Signals 10
Range for all digits 0…3, where 0 is Off and 1…6 are digital outputs
Data Size 4 digits
Digit Description Default
0 Reserved 0x0
1 Reserved 0x0
2 Reserved 0x0
3 Reserved 0x0
When Enabled Reserved
Applicable Operating Mode Indexing
Modbus Address 32
[Pr - 0.32] I/O Control Authority
Applicable Operating Mode All
Data Size 2 digits
Digit 0 Modbus Input Function Control
Ultraware Name Modbus Input Function Control
Range Value Description
0x0 Disable
0x1 Enable
Default 0
Digits 1 Modbus Run Function Control
Ultraware Name Modbus Run Function Control
Range Value Description
0x0 Disable
0x1 Enable
Default 0
When Enabled Servo-Off -> Setting
(1)
Applicable Operating Mode All
Modbus Address 33
(1) Refer to Setting Values for Parameters [Pr - 0.22]…[Pr - 0.32] in the table immediately below.
Setting Values for Parameters [Pr - 0.22]
Setting Value
(1)
6 5 4 3 2 1 0
…[Pr - 0.32]
Input Channel No. AL #3 AL #2 AL#1 DO#3 DO#2 DO#1 Input Signal
CN1 Pin No. 39 38 37 47,48 43,44 41,42 Off
(1) Setting Values are reserved (not available) for [Pr - 0.28] and [Pr - 0.31].
66 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 67

Standard Drive Parameters Appendix A
Group 1 - Gain Control
[Pr - 1.00] Velocity Regulator Response Level
Ultraware Name Velocity Regulator Response level
Range 1…150
Default 50
Units %
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 100
[Pr - 1.01] System Gain
Ultraware Name System Gain
Range 10...500
Default 50
Units Hz
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 101
[Pr - 1.02] Velocity Regulator P Gain
Ultraware Name Main Velocity Regulator Gains: Proportional Gain
Range 0…10,000
Default 60
Units -
When Enabled Immediately
Applicable Operating Mode Follower, Analog Speed, Preset
Modbus Address 102
[Pr - 1.03] Velocity Regulator I Gain
Ultraware Name Main Velocity Regulator Gains: Integral Gain
Range 0…60,000
Default 26
Units -
When Enabled Immediately
Applicable Operating Mode Follower, Analog Speed, Preset
Modbus Address 103
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 67
Page 68

Appendix A Standard Drive Parameters
[Pr - 1.04] Velocity Regulator D gain
Ultraware Name Main Velocity Regulator Gains: Derivative Gain
Range 0…1000
Default 0
Units -
When Enabled Immediately
Applicable Operating Mode Follower, Analog Speed, Preset
Modbus Address 104
[Pr - 1.05] Velocity Error Filter
Ultraware Name Calibration: Error Filter Bandwidth
Range 0…2500
Default 30
Units Hz
When Enabled Immediately
Applicable Operating Mode Follower, Analog Speed, Preset
Modbus Address 105
[Pr - 1.06] Position Regulator Kp Gain
Ultraware Name Main Position Regulator Gains: Kp
Range 0…700
Default 20
Units Hz
When Enabled Immediately
Applicable Operating Mode Follower, Analog Speed, Preset
Modbus Address 106
68 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 69

Standard Drive Parameters Appendix A
[Pr - 1.07] Current Command Lowpass Filter Bandwidth
Ultraware Name Main Current Regulator Gains: Low Pass Filter Bandwidth
Range 0…10,000
Default 300
Units Hz
Applicable Operating Mode All
When Enabled Immediately
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 107
[Pr - 1.08] Velocity Command Lowpass Filter Bandwidth
Ultraware Name Main Velocity Regulator Gains: Low Pass Filter Bandwidth
Range 0…10,000
Default 1000
Units Hz
When Enabled Immediately
Applicable Operating Mode Follower, Analog Speed, Preset
Modbus Address 108
[Pr - 1.09] Position Command Lowpass Filter Bandwidth
Ultraware Name Main Position Regulator Gains: Low Pass Filter Bandwidth
Range 0…1000
Default 0
Units Hz
When Enabled Immediately
Applicable Operating Mode Follower
Modbus Address 109
[Pr - 1.10] 1st Resonant Frequency Suppression Filter
Ultraware Name Main Current Regulator Gains: 1st Resonant Frequency
Description Suppresses Vibration by cutting off Current Command in
Range 0…10,000
Default 10,000
Units Hz
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 110
Suppression Filter
assigned frequency band
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 69
Page 70

Appendix A Standard Drive Parameters
[Pr - 1.11] 1st Resonant Frequency Suppression Filter Width
Ultraware Name Main Current Regulator Gains: 1st Resonant Frequency
Suppression Filter Width
Description Set up the notch width of 1st resonance suppressing filter
in 20 steps. Higher the setup, larger the notch width you
can obtain.
Range 1…20
Default 10
Units
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 111
[Pr - 1.12] 2nd Resonant Frequenc y Suppression Filter
Ultraware Name 2nd Main Current Regulator Gains: 2nd Resonant
Frequency Suppression Filter
Description Suppresses Vibration by cutting off Current Command in
assigned frequency band
Range 0…10,000
Default 10,000
Units Hz
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 112
[Pr - 1.13] 2nd Resonant Frequenc y Suppression Filter Width
Ultraware Name Main Current Regulator Gains: 2nd Resonant Frequency
Description Set up the notch width of 2nd resonance suppressing
Range 1…20
Default 10
Units -
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 113
Suppression Filter Width
filter in 20 steps. The higher the setup, larger the notch
width you can obtain.
70 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 71

Standard Drive Parameters Appendix A
[Pr - 1.14] 2nd Resonant Frequenc y Suppression Filter Depth
Ultraware Name Main Current Regulator Gains: 2nd Resonant Frequency
Description Set up the 2nd notch depth of the resonance suppressing
Range 0…100
Default 100
Units -
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 114
[Pr - 1.15] Position Regulator Kff gain
Ultraware Name Main Position Regulator Gains: Kff
Range 0…100
Default 0
Units %
When Enabled Immediately
Applicable Operating Mode Follower
Modbus Address 115
Suppression Filter Depth
filter. The higher the setup, the shallower the notch depth
and the smaller the phase delay you can obtain.
[Pr - 1.16] Position Regulator Kff Bandwidth
Ultraware Name Main Position Regulator Gains: Kff Low Pass Filter
Range 0…2500
Default 200
Units Hz
When Enabled Immediately
Applicable Operating Mode Follower
Modbus Address 116
Bandwidth
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 71
Page 72

Appendix A Standard Drive Parameters
[Pr - 1.17] Velocity Regulator I Gain Mode
Ultraware Name Main Velocity Regulator Gains: I Gain Mode
Description During transient response, Speed Response Overshoot can
Range Value Description
Default 0
When Enabled Servo-Off -> Setting
Applicable Operating Mode All
Modbus Address 117
be suppressed by a speed controller change from a
Proportional Integral (PI) controller into a Proportional (P)
controller. It reduces position completion time during
position control.
0x0 Do not use P/PI Mode
0x1 When Current Command
0x2 When Speed Command
0x3 When Position error
0x4 Automatically velocity
Convers ion.
exceeds Current Value in
[Pr - 1.18], Speed
Controller is changed from
PI Controller to P Controller.
exceeds Speed Value in
[Pr - 1.18]
, Speed
Controller is changed from
PI Controller to P Controller.
exceeds Position error
Value in [Pr - 1.18]
Controller is changed from
PI Controller to P Controller.
controller is changed from
PI Controller to P Controller.
, Speed
72 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 73

Standard Drive Parameters Appendix A
[Pr - 1.18] Velocity Regulator I Gain Disable Threshold
Ultraware Name Main Velocity Regulator Gains: I Gain Disable Threshold
Range 0…3000
Default 100
Units If [Pr - 1.17] = 1, units are % of rated continuous current
If [Pr - 1.17] = 2, units are rotary motors: rpm; linear
motors: mm/s
If [Pr - 1.17] = 3, units are Counts
When Enabled Follower, Analog Velocity, Preset
Applicable Operating Mode Immediately
Modbus Address 118
[Pr - 1.19] Position Regulator High Error Output Offset
Ultraware Name Main Position Regulator Gains: High Error Output Offset
Range 0…450
Default 0
Units Rotary motors: rpm; Linear motors: mm/s
When Enabled All
Applicable Operating Mode Immediately
Modbus Address 119
[Pr - 1.20] Position Regulator High Error Output Threshold
Ultraware Name Main Position Regulator Gains: High Error Output
Range 0…50,000
Default 1000
Units Counts
When Enabled All
Applicable Operating Mode Immediately
Modbus Address 120
Threshol d
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 73
Page 74

Appendix A Standard Drive Parameters
[Pr - 1.21] Current Regulator Bandwidth Reduc tion Scale
Ultraware Name Main Current Regulator Gains: Gain
Range Value Description
0x0 High bandwidth
0x1 Medium bandwidth
(0.6667 * high)
0x2 Low bandwidth (0.3334 *
high)
Default 0x1
When Enabled All
Applicable Operating Mode Immediately
Modbus Address 121
[Pr - 1.22] On-line Vibration Mode
Data Size 1 digits
Digit 0 On-line Vibration Suppression Mode
Ultraware Name On-line Vibration Suppression Mode
Range Value Description
0x0 D isable
0x1 Normal and High Velocity
Mode
0x2 Slow Velocity Mode
without initial value
Default 0x0
Digit 1 On-line Vibration Suppression Gain
Ultraware Name On-line Vibration Suppression Gain
Range Value Description
0x0 Low
0x1 High
Default 0x0
When Enabled All
Applicable Operating Mode Servo-Off -> Setting
Modbus Address 122
74 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 75

Standard Drive Parameters Appendix A
[Pr - 1.23] Velocity Regulator Configuration
Applicable Operating Mode All
Data Size 1 digits
Digit 0 Velocity Command Filter on Follower
Ultraware Name Velocity Command Filter on Follower
Range Value Description
0x0 D isable
0x1 Enable
Default 0x0
When Enabled Immediately
Applicable Operating Mode Servo-Off -> Setting
Modbus Address 123
[Pr - 1.24] Delay Time of Gain Switching
Ultraware Name Gain Switching: Delay Time of Gain Switching
Range 0…10,000
Default 0
Units X 200 μs
When Enabled Immediately
Applicable Operating Mode Follower, Analog Velocity, Preset
Modbus Address 124
[Pr - 1.25] Level of Gain Switching
Ultraware Name Gain Switching: Level of Gain Switching
Range 0…10,000
Default 0
Units -
When Enabled Immediately
Applicable Operating Mode Follower, Analog Velocity, Preset
Modbus Address 125
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 75
Page 76

Appendix A Standard Drive Parameters
[Pr - 1.26] Hysteresis of Gain Switching
Ultraware Name Gain Switching: Hysteresis of Gain Switching
Range 0…10,000
Default 0
Units -
When Enabled Immediately
Applicable Operating Mode Follower, Analog Velocity, Preset
Modbus Address 126
[Pr - 1.27] Position Gain Switching Time
Ultraware Name Gain Switching: Level of Gain Switching
Range 0…10,000
Default 0
Units x 200 μs
When Enabled Immediately
Applicable Operating Mode Follower, Analog Velocity, Preset
Modbus Address 127
[Pr - 1.28] 2nd Velocity Regulator P Gain
Ultraware Name 2nd Regulator Gain: P
Range 0…10,000
Default 60
Units -
When Enabled Immediately
Applicable Operating Mode Follower, Analog Velocity, Preset
Modbus Address 128
[Pr - 1.29] 2nd Velocity Regulator I Gain
Ultraware Name 2nd Regulator Gain: Integrator Gain
Range 0…60,000
Default 26
Units -
When Enabled Immediately
Applicable Operating Mode Follower, Analog Velocity, Preset
Modbus Address 129
76 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 77

Standard Drive Parameters Appendix A
[Pr - 1.30] 2nd Position Regulator Kp Gain
Ultraware Name 2nd Regulator Gain: Kp
Range 0…700
Default 20
Units Hz
When Enabled Immediately
Applicable Operating Mode Position
Modbus Address 130
[Pr - 1.31] 2nd Current Command Lowpass Filter Bandwidth
Ultraware Name 2nd Regulator Gain: Low Pass Bandwidth (IReg)
Range 0…10,000
Default 300
Units Hz
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 131
[Pr - 1.32] 2nd Velocity Command Lowpass Filter Bandwidth
Ultraware Name 2nd Regulator Gain: Low Pass Bandwidth (VReg)
Range 0…10,000
Default 1000
Units Hz
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 132
[Pr - 1.33] 3rd Velocity Regulator P Gain
Ultraware Name 3rd Regulator Gain: P Gain
Range 0…10,000
Default 60
Units -
When Enabled Immediately
Applicable Operating Mode Follower, Analog Velocity, Preset
Modbus Address 133
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 77
Page 78

Appendix A Standard Drive Parameters
[Pr - 1.34] 3rd Velocity Regulator I Gain
Ultraware Name 3rd Regulator Gain: Integrator Gain
Range 0…60,000
Default 26
Units -
When Enabled Immediately Immediately
Applicable Operating Mode Follower, Analog Velocity, Preset
Modbus Address 134
[Pr - 1.35] 3rd Position Regulator Kp Gain
Ultraware Name 3rd Regulator Gain: Kp
Range 0…700
Default 20
Units Hz
When Enabled Immediately
Applicable Operating Mode Position
Modbus Address 135
[Pr - 1.36] 3rd Current Command Lowpass Filter Bandwidth
Ultraware Name 3rd Regulator Gain: Low Pass Bandwidth (IReg)
Range 0…10,000
Default 300
Units Hz
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 136
[Pr - 1.37] 3rd Velocity Command Lowpass Filter Bandwidth
Ultraware Name 3rd Regulator Gain: Low Pass Bandwidth (VReg)
Range 0…10,000
Default 1000
Units Hz
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 137
78 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 79

Standard Drive Parameters Appendix A
[Pr - 1.38] 4th Velocity Regulator P Gain
Ultraware Name 4th Regulator Gain: P
Range 0…10,000
Default 60
Units -
When Enabled Immediately
Applicable Operating Mode Follower, Analog Velocity, Preset
Modbus Address 138
[Pr - 1.39] 4th Velocity Regulator I Gain
Ultraware Name 4th Regulator Gain: Integrator Gain
Range 0…60,000
Default 26
Units
When Enabled Immediately
Applicable Operating Mode Follower, Analog Velocity, Preset
Modbus Address 139
[Pr - 1.40] 4th Position Regulator Kp Gain
Ultraware Name 4th Regulator Gain: Kp
Range 0…700
Default 20
Units Hz
When Enabled Immediately
Applicable Operating Mode Position
Modbus Address 140
[Pr - 1.41] 4th Current Command Lowpass Filter Bandwidth
Ultraware Name 4th Regulator Gain: Low Pass Bandwidth (IReg)
Range 0…10,000
Default 300
Units Hz
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 141
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 79
Page 80

Appendix A Standard Drive Parameters
[Pr - 1.42] 4th Velocity Command Lowpass Filter Bandwidth
Ultraware Name 4th Regulator Gain: Low Pass Bandwidth (VReg)
Range 0…10,000
Default 1000
Units Hz
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 142
80 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 81

Standard Drive Parameters Appendix A
Group 2 - Speed Control
[Pr - 2.00] Velocity Scale
Ultraware Name Velocity Scale
Internal Value
Range 100...20,000 10.0...2000.0
Default 5000 500.0
Units Rotary motors: 0.1 rpm/V
Linear motors: 0.1 mm/s/V
When Enabled Servo-Off -> Setting
Applicable Operating Mode Analog Velocity
Modbus Address 200
(1) Internal Value used for Modbus reading and writing functions
[Pr - 2.01] Jog Velocity Command
Ultraware Name Velocity Control Panel: Velocity Command
Range 0…6000
Default 50
Units Rotary motors: rpm; Linear motors: mm/s
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 201
(1)
Display Value
Rotary motors: rpm/V
Linear motors: mm/s/V
[Pr - 2.02] Acceleration
Ultraware Name Acceleration Limits: Acceleration
Range 1…2,147,483,647
Default 41,667
Units Rotary motors: 10
-2
*rev/s2; Linear motors: mm/s
When Enabled Immediately
Applicable Operating Mode Analog Velocity Input, Preset Velocity
Modbus Address Pr-2.02[Lo] = 202, Pr-2.02[Hi] = 203
2
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 81
Page 82

Appendix A Standard Drive Parameters
[Pr - 2.03] Deceleration
Ultraware Name Acceleration Limits: Deceleration
Range 1…2,147,483,647
Default 41667
Units Rotary motors: 10
-2
*rev/s2; Linear motors: mm/s2
When Enabled Immediately
Applicable Operating Mode Analog Velocity Input, Preset Velocity
Modbus Address Pr-2.03[Lo] = 204, Pr-2.03[Hi] = 205
[Pr - 2.04] S-Curve Time
Ultraware Name Acceleration Limits: S-Curve Time
Range 0…5000
Default 0
Units Milliseconds
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 206
[Pr - 2.05] Preset Velocity 1
Ultraware Name Preset Velocity 1
Range -6000…6000
Default 0
Units Rotary motors: rpm; Linear motors: mm/s
When Enabled Immediately
Applicable Operating Mode Preset
Modbus Address 207
Pr - 2.06] Preset Velocity 2
Ultraware Name Preset Velocity 2
Range -6000…6000
Default 0
Units Rotary motors: rpm; Linear motors: mm/s
When Enabled Immediately
Applicable Operating Mode Preset
Modbus Address 208
82 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 83

Standard Drive Parameters Appendix A
Pr - 2.07] Preset Velocity 3
Ultraware Name Preset Velocity 3
Range -6000…6000
Default 0
Units Rotary motors: rpm; Linear motors: mm/s
When Enabled Immediately
Applicable Operating Mode Preset
Modbus Address 209
[Pr - 2.08] Preset Velocity 4
Ultraware Name Preset Velocity 4
Range -6000…6000
Default 0
Units Rotary motors: rpm; Linear motors: mm/s
When Enabled Immediately
Applicable Operating Mode Preset
Modbus Address 210
[Pr - 2.09] Preset Velocity 5
Ultraware Name Preset Velocity 5
Range -6000…6000
Default 0
Units Rotary motors: rpm; Linear motors: mm/s
When Enabled Immediately
Applicable Operating Mode Preset
Modbus Address 211
[Pr - 2.10] Preset Velocity 6
Ultraware Name Preset Velocity 6
Control Index 6
Range -6000…6000
Default 0
Units Rotary motors: rpm; Linear motors: mm/s
When Enabled Immediately
Applicable Operating Mode Preset
Modbus Address 212
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 83
Page 84

Appendix A Standard Drive Parameters
[Pr - 2.11] Preset Velocity 7
Ultraware Name Preset Velocity 7
Range -6000…6000
Default 0
Units Rotary motors: rpm; Linear motors: mm/s
When Enabled Immediately
Applicable Operating Mode Preset
Modbus Address 213
[Pr - 2.12] Manual Velocity Limit
Ultraware Name Manual Velocity limit
Range 1…6000
Default 5000
Units Rotary motors: rpm; Linear motors: mm/s
When Enabled Servo-Off -> Setting
Applicable Operating Mode Follower, Analog Velocity, Preset
Modbus Address 214
[Pr - 2.13] Velocity Limit Mode
Ultraware Name Velocity Limits: Velocity Limit Mode
Range Value Description
0x0 Disabled
0x1 Limited by [Pr - 2.12]
0x2 Limited by Analog Speed
Command Value (except
Analog Speed Mode).
0x3 Limited by lesser one
between [Pr - 2.12]
Analog Speed Command.
Default 0
When Enabled Servo-Off -> Setting
Applicable Operating Mode All
Modbus Address 215
.
and
84 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 85

Standard Drive Parameters Appendix A
Group 3 - Position Control
[Pr - 3.00] Follower
Data Size 4 digits
Digit 0 Command Type
Ultraware Name Command Type
Range Value Description
0x0 Step Up/Step Down,
0x1 Step Up/Step Down,
0x2 Step/Direction, Positive
0x3 Step/Direction, Negative
0x4 Auxiliary Encoder, x1
0x5 Auxiliary Encoder, x2
0x6 Auxiliary Encoder, x4
Default 0x0
Note For Command types 0x4, 0x5, and 0x6:
Motor Counts = Master Lines * MULT * ……
…. (4 * Para3.01) / Para3.02
where MULT is 1, 2 or 4 for command types 0x4, 0x5 and
0x6 respectively.
Applicable Operating Mode Follower
Digit 1 Controller Output Type
Ultraware Name Controller Output Type
Range Value Description
0x0 Use Low speed Line Drive
0x1 Use Open Collector in Host
0x2 Use High Frequency Line
Default 0x0
Applicable Operating Mode Follower
Digit 2 Encoder Output Forward Direction
Ultraware Name Encoder Output Forward Direction
Range Value Description
0x0 During Forward Rotation,
0x1 During Forward Rotation,
Posit ive log ic
Negative logic
Logic
Logic
Output in Host Controller
for isolated electrical
connection.
Controller.
Drive Output in Host
Controller.
Encoder Output Phase A
have a lead of 90º over
Phase B.
Encoder Output Phase B
have a lead of 90º over
Phase A.
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 85
Page 86

Appendix A Standard Drive Parameters
[Pr - 3.00] (continued) Follower
Default 0x0
Applicable Operating Mode All
Digit 3 1st Gear ratio change
Ultraware Name 1st Gear ratio change
Range Value Description
0x0 Enable Only on Drive
Disabled
0x1 Always Enable
Default 0x0
When Enabled Servo-Off -> Setting
Applicable Operating Mode Follower
Modbus Address 300
[Pr - 3.01] 1st Gear Ratio, Follower Counts
Ultraware Name 1st Gear R atio Numerator
Range 1…65,535
Default 4
Units
When Enabled Servo-Off -> Setting
Applicable Operating Mode Follower
Modbus Address 301
86 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 87

Standard Drive Parameters Appendix A
[Pr - 3.02] 1st Gear Ratio, Master Counts
Ultraware Name 1st Gear R atio Denominator
Range 1…65,535
Default 1
Units
When Enabled Servo-Off -> Setting
Applicable Operating Mode Follower
Modbus Address 302
[Pr - 3.03] Encoder Output Ratio, Output Counts
Ultraware Name Output Ratio Numerator
Range 1…32,768
Default 1
Units
When Enabled Servo-Off -> Setting
Applicable Operating Mode All
Modbus Address 303
[Pr - 3.04] Encoder Output Ratio, Motor Counts
Ultraware Name Output Ratio Numerator
Range 1…32,768
Default 1
Units
When Enabled Servo-Off -> Setting
Applicable Operating Mode All
Modbus Address 304
[Pr - 3.05] 2nd Gear Ratio, Follower Counts
Ultraware Name 2nd Gear Ratio Numerator
Range 1…65,535
Default 4
Units
When Enabled Servo-Off -> Setting
Applicable Operating Mode Follower
Modbus Address 305
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 87
Page 88

Appendix A Standard Drive Parameters
[Pr - 3.06] 2nd Gear Ratio, Master Counts
Ultraware Name 2nd Gear Ratio Denominator
Range 1…65,535
Default 1
Units
When Enabled Servo-Off -> Setting
Applicable Operating Mode Follower
Modbus Address 306
[Pr - 3.07] Reserved
When Enabled Reserved for future use.
88 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 89

Standard Drive Parameters Appendix A
[Pr - 3.08] Digital Filter Cut-off Frequency
Data Size 3 digits
Digit 0 Low drive input
Val ue De scr ipt io n
0x0 …0x7 0: 3 MHz
1: 1.75 MHz
2: 1.5 MHz
3: 1 MHz
4: 0.75 MHz
5: 0.625 MHz
6: 0.562 MHz
7: 0.525 MHz
Default = 1
Digit 1 Open collector input
Val ue De scr ipt io n
0x0 …0x7 0: 3 MHz
1: 1.75 MHz
2: 1.5 MHz
3: 1 MHz
4: 0.75 MHz
5: 0.625 MHz
6: 0.562 MHz
7: 0.525 MHz
Default = 5
Digit 2 High frequency line drive input
0x0 …0x7 0: 3 MHz
1: 1.75 MHz
2: 1.5 MHz
3: 1 MHz
4: 0.75 MHz
5: 0.625 MHz
6: 0.562 MHz
7: 0.525 MHz
Default = 0
When Enabled Servo-Off -> Setting
Applicable Operating Mode All
Modbus Address 308
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 89
Page 90

Appendix A Standard Drive Parameters
Group 4 - Torque Controls
[Pr - 4.00] Current Scale
Ultraware Name Current Scale
Internal Value
Range 0…1000 0…100.0
Default 333 33.3
Units 0.1% of rated continuous current/V % of rated continuous current/V
When Enabled Servo-Off -> Setting
Applicable Operating Mode Analog Current command, Dual current Command
Modbus Address 400
(1) Internal Value used for Modbus reading/writing functions
[Pr - 4.01] Positive Internal Current Limit
Ultraware Name Current Limits: Positive Internal
Range 0…500
Default 300
Units % of motor rated continuous current
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 401
(1)
Display Value
[Pr - 4.02] Negative Internal Current Limit
Ultraware Name Current Limits: Negative Internal
Range 0…500
Default 300
Units % of motor rated continuous current
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 402
[Pr - 4.03] Positive External Current Limit
Ultraware Name Current Limits: Positive External
Range 0…500
Default 100
Units % of motor rated continuous current
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 403
90 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 91

Standard Drive Parameters Appendix A
[
Pr - 4.04] Negative External Current Limit
Ultraware Name Current Limits: Negative External
Range 0…500
Default 100
Units % of motor rated continuous current
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 404
[Pr - 4.05] Overtravel Current Limit
Ultraware Name Stopping Functions: Maximum Stopping Current
Range 0…500
Default 300
Units % of motor rated continuous current
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 405
[Pr - 4.06] Initial Current Bias
Ultraware Name Initial Current Bias
Description Constant current applied when the drive enables. Meant
to hold vertical loads.
Range -100…100
Default 0
Units % of motor rated continuous current
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 406
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 91
Page 92

Appendix A Standard Drive Parameters
Group 5 - Supplemental Drive Controls
[Pr - 5.00] In Position Size
Ultraware Name Position Functions: In Position Size
Description If position error < In Position Size for 1 ms and the In
Position Size output signal is assigned, the In Position
output is turned ON.
Range 0…2500
Default 10
Units Counts
When Enabled Immediately
Applicable Operating Mode Follower
Modbus Address 500
[Pr - 5.01] Reserved
When Enabled Reserved for future use.
[Pr - 5.02] Near Position Size
Ultraware Name Position Functions: Near Position Size
Description If po sition error < Near Position Size and the Near Position
Range 0…2500
Default 20
Units Counts
When Enabled Immediately
Applicable Operating Mode Follower
Modbus Address 502
output signal is assigned, the Near Position output is
turned ON
92 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 93

Standard Drive Parameters Appendix A
[Pr - 5.03] Speed Window
Ultraware Name Speed Functions: Speed Window
Description If the speed error < Speed Window for 10 ms and the
Range 0…1000
Default 10
Units Rotary motors: rpm; Linear motors: mm/s
When Enabled Immediately
Applicable Operating Mode Follower, Analog Velocity Input, Preset
Modbus Address 503
[Pr - 5.04] Up to Speed
Ultraware Name Speed Functions: Up to Speed
Description If the motor speed > Up to Speed and the Up to Speed
Range 1…5000
Default 20
Units Rotary motors: rpm; Linear motors: mm/s
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 504
Within Speed Window output signal is assigned, then the
Within Speed Window output is turned ON
output signal is assigned, then the Up to Speed output is
turned ON.
[Pr - 5.05] Zero Clamp
Ultraware Name Speed Functions: Zero Clamp
Description If the Analog Speed command < Zero Clamp, then the
Range 0…5000
Default 0
Units Rotary motors: rpm; Linear motors: mm/s
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 505
Analog Speed command is ignored and the Motor Speed
command is set to zero.
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 93
Page 94

Appendix A Standard Drive Parameters
[Pr - 5.06] Brake Inactive Delay
Ultraware Name Digital Outputs: Brake Inactive Delay
Description Brake Inactive delay is the time from when the drive is
enabled to when the brake is released.
Range 0…10,000
Default 0
Units ms
When Enabled Immediately
Applicable Operating Mode Servo-Off -> Setting
Modbus Address 506
[Pr - 5.07] Disable Delay
Ultraware Name Stopping Functions: Disable Delay
Description Disable Delay is the time from when the Drive Disable
command is received to wh en the Drive Disable command
is actually executed.
Range 0…10,000
Default 0
Units ms
When Enabled All
Applicable Operating Mode Servo-Off -> Setting
Modbus Address 507
[Pr - 5.08] Brake Active Delay
Ultraware Name Digital Outputs: Brake Active Delay
Description Brake Active Delay is the time from when the drive is
Range 0…10,000
Default 500
Units ms
When Enabled All
Applicable Operating Mode Servo-Off -> Setting
Modbus Address 508
disabled to when the break starts operating.
94 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 95

Standard Drive Parameters Appendix A
[Pr - 5.09] Disabled Braking Speed
Ultraware Name Stopping Functions: Braking Application Speed
Description The Disabled Braking Speed is the feedback speed below
Range 0…1000
Default 100
Units Rotary motors: rpm; Linear motors: mm/s
When Enabled All
Applicable Operating Mode Servo-Off -> Setting
Modbus Address 509
[Pr - 5.10] Following Error Limit
Ultraware Name Following Error Limit
Description A following error fault occurs when the difference
Range 0…2,147,483,647
Default 99,999
Units Counts
When Enabled Immediately
Applicable Operating Mode Follower
Modbus Address Pr5-10[Lo] = 510, Pr5-10[Hi] = 511
which the motor break is engaged, after disabling the
drive.
between position command and actual position is greater
than this parameter.
[Pr - 5.11] Reserved
When Enabled Reserved for future use.
[Pr - 5.12] AC line loss fault delay
Ultraware Name AC Line Loss Fault Delay
Description The AC Line Loss Fault is inhibited for this amount of time,
Range 20…1000
Default 20
Units ms
When Enabled Servo-Off -> Setting
Applicable Operating Mode All
Modbus Address 513
when a loss of AC power is detected.
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 95
Page 96

Appendix A Standard Drive Parameters
[Pr - 5.13] Analog Output CH1 Selection
Ultraware Name Analog Output 1: Signal
Range 0…28 (except 15,23,25,26)
Default 0
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 514
[Pr - 5.14] Analog Output CH2 Selection
Ultraware Name Analog Output 2: Signal
Range 0…28 (except 15,23,25,26)
Default 1
When Enabled Immediately
Applicable Operating Mode All
Modbus Address 515
[Pr - 5.15] Analog Output CH1 Scale
Ultraware Name Analog Output 1: Scale
Range 1 …99,999
Units Units depend on the channel selected in [Pr - 5.13]
Default 500
When Enabled Immediately
Applicable Operating Mode All
Modbus Address Pr5-15[Lo] = 516, Pr5-15[Hi] = 517
[Pr - 5.16] Analog Output CH2 Scale
Ultraware Name Analog Output 2: Scale
Range 1…99,999
Units Units depends on the channel selected in [Pr - 5.14]
Default 500
When Enabled Immediately
Applicable Operating Mode All
Modbus Address Pr5-16[Lo] = 518, Pr5-16[Hi] = 519
96 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 97

Standard Drive Parameters Appendix A
Group 6 - Supplemental Gain and Report Settings
[Pr - 6.00] Analog Velocity Command Offset
Ultraware Name Velocity Command Offset
Range -10,000…10,000
Default 0
Units 0.1 mV
When Enabled Ser vo-Off -> Setting (ENG Mode)
Applicable Operating Mode Analog Velocity Command
[Pr - 6.01] Analog Current Command Offset
Ultraware Name Current Command Offset
Range -10,000…10,000
Default 0
Units 0.1 mV
When Enabled Ser vo-Off -> Setting (ENG Mode)
Applicable Operating Mode Analog Current Command
[Pr - 6.02] U Phase Current Sensing Offset
Ultraware Nam e Calibration: U Phase Current Offse t
Range -60,000…60,000
Default 0
Units 0.01 mA
When Enabled Ser vo-Off -> Setting (ENG Mode)
Applicable Operating Mode All
[Pr - 6.03] W Phase Current Sensing Offset
Ultraware Name Calibration: W Phase Current Offset
Range -60,000…60,000
Default 0
Units 0.01 mA
When Enabled Ser vo-Off -> Setting (ENG Mode)
Applicable Operating Mode All
[Pr - 6.04] A lead B Swap
Ultraware Name A lead B Swap
Description Select A-lead-B, or B-lead-A
Data Size 1 digit
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 97
Page 98

Appendix A Standard Drive Parameters
[Pr - 6.04] A lead B Swap
Range Value Description
0Disable
1Enable
Default 0
Unit -
When Enabled Servo-Off -> Setting -> After power cycle
(ENG Mode)
Applicable Operating Mode All
[Pr - 6.05] Dynamic Brake Circuit Protection
Ultraware Name Dynamic Brake Circuit Protection
Description The Dynamic Brake Circuit Protection is inhibited that the
motor DB braking current is too large for the drive
Data Size 1 digit
Range Value Description
0 Disable
1Enable
Default 1
Units -
When Enabled Ser vo-Off -> Setting (ENG Mode)
Applicable Operating Mode All
[Pr - 6.06] Fault Detail Sampling Period
Ultraware Name Fault Detail Setup: Sample Period
Range 1…100
Default 5
Units 0.2 ms
When Enabled Immediately (ENG Mode)
[Pr - 6.07] Fault Detail Data Selection 1
Ultraware Name Fault Detail Setup: Channel A
Description Refer to Monitor Variables on page 131
information on the range options.
Range 0…28
(except 15, 23, 25, and 26)
Default 0
When Enabled Immediately (ENG Mode)
for more
98 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Page 99

Standard Drive Parameters Appendix A
[Pr - 6.08] Fault Detail Data Selection 2
Ultraware Name Fault Detail Setup: Channel B
Description Refer to Monitor Variables on page 131
information on the range options.
Range 0…28
(except 15, 23, 25, and 26)
Default 3
When Enabled Immediately (ENG Mode)
[Pr - 6.09] Fault Detail Data Selection 3
Ultraware Name Fault Detail Setup: Channel C
Description Refer to Monitor Variables on page 131
information on the range options.
Range 0…28
(except 15, 23, 25, and 26)
Default 11
When Enabled Immediately (ENG Mode)
for more
for more
[Pr - 6.10] Fault Detail Data Selection 4
Ultraware Name Fault Detail Setup: Channel D
Description Refer to Monitor Variables on page 131
information on the range options.
Range 0…28
(except 15, 23, 25, and 26)
Default 16
When Enabled Immediately (ENG Mode)
[Pr - 6.11] 1st Resonant Frequency Suppression Filter
Ultraware Name Main Current Regulator Gains: 1st Resonant Frequency
Suppression Filter
Description Suppresses Vibration by cutting off Current Command in
assigned frequency band
Range 0…10,000
Default 10,000
Units Hz
When Enabled Immediately (Read Parameter for ENG)
Applicable Operating Mode All
for more
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013 99
Page 100

Appendix A Standard Drive Parameters
[Pr - 6.12] 2nd Resonant Frequenc y Suppression Filter
Ultraware Name Main Current Regulator Gains: 1st Resonant Frequency
Suppression Filter
Description Suppresses Vibration by cutting off Current Command in
assigned frequency band
Range 0…10,000
Default 10,000
Units Hz
When Enabled Immediately (Read Parameter for ENG)
Applicable Operating Mode All
100 Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
 Loading...
Loading...