


 Loading...
Loading...SERVICE MANUAL
AUTOMATIC DOCUMENT FEEDER
MR-2017/2020
Model: MR-2017/2020
Publish Date: December 2005
File No. SME050026D0
R05092196700-TTEC
Ver04_2009-12
Trademarks
•The official name of Windows 95 is Microsoft Windows 95 Operating System.
•The official name of Windows 98 is Microsoft Windows 98 Operating System.
•The official name of Windows Me is Microsoft Windows Millennium Edition Operating System.
•The official name of Windows 2000 is Microsoft Windows 2000 Operating System.
•The official name of Windows XP is Microsoft Windows XP Operating System.
•Microsoft, Windows, Windows NT, Windows Vista and the brand names and product names of other Microsoft products are trademarks or registered trademarks of Microsoft Corporation in the U.S. and/or other countries.
•Molykote is a registered trademark of Dow Corning Corporation.
•Other company names and product names in this manual are the trademarks of their respective companies.
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved
Under the copyright laws, this manual cannot be reproduced in any form without prior written permission of TOSHIBA TEC CORPORATION. No patent liability is assumed, however, with respect to the use of the information contained herein.
07/06
General Precautions for Installation/Servicing/Maintenance for the MR-2017/2020
The installation and service should be done by a qualified service technician.
1)When installing the MR-2017/2020 to the Equipment, be sure to follow the instructions described in the “Unpacking/Set-Up Procedure for the MR-2017/2020” booklet which comes with each unit of the MR-2017/2020.
2)The MR-2017/2020 should be installed by an authorized/qualified person.
3)The equipment must be grounded for safety.
4)Before starting installation, servicing or maintenance work, be sure to turn OFF and unplug the equipment first.
5)The equipment shall be installed near the socket outlet and shall be easily accessible.
6)Be sure to fix and plug in the power cable securely after the installation so that no one trips over it.
7)Unplug the power cable and clean the area around the prongs of the plug and socket outlet once a year or more. A fire may occur when dust lies on this area.
8)The MR-2017/2020 should be grounded to the specified positions on the mochine frame.
9)When servicing or maintaining the MR-2017/2020, be careful about the rotating or operation sections such as gears, pulleys, sprockets, cams, belts, etc.
10)Reassembly of disassembled parts is the reverse of the disassembly unless otherwise noted in this manual or other related documents.
Care should be taken that small parts, such as screws, washers, pins, E-rings, star washers, harnesses are not installed in the wrong places.
11)Basically, the machine should not be operated with any parts removed or disassembled.
12)Delicate parts for preventing safety hazard problems (such as switches, sensors, etc. if any) should be handled/installed/adjusted correctly.
13)Use suitable measuring instruments and tools.
14)During servicing or maintenance work, be sure to check the serial No. plate and other cautionary labels (if any) to see if they are clean and firmly fixed. If not, take appropriate actions.
15)The PC board must be stored in an anti-electrostatic bag and handled carefully using a wristband, because the ICs on it may be damaged due to static electricity. Before using the wrist band, pull out the power cord plug of the equipment and make sure that there is no uninsulated charged objects in the vicinity.
16)For the recovery and disposal of used MR-2017/2020, consumable parts and packing materials, follow the relevant local regulations/rules should be followed.
17)After completing installation, servicing and maintenance of the MR-2017/2020, return the MR-2017/ 2020 to its original state, and check operation.
09/12
|
|
CONTENTS |
|
1. |
SPECIFICATION ........................................................................................................... |
1-1 |
|
2. |
GENERAL DESCRIPTION............................................................................................ |
2-1 |
|
|
2.1 |
Main Components................................................................................................................ |
2-1 |
|
2.2 |
Sectional View ..................................................................................................................... |
2-2 |
|
2.3 |
Electric Parts Layout............................................................................................................ |
2-3 |
|
2.4 |
Symbols and Functions of Various Components................................................................. |
2-4 |
|
2.5 |
Diagram of Signal Blocks..................................................................................................... |
2-5 |
|
2.6 |
Description of Interface Signals........................................................................................... |
2-6 |
3. |
DESCRIPTION OF OPERATIONS ............................................................................... |
3-1 |
|
|
3.1 |
DRIVE SYSTEM .................................................................................................................. |
3-1 |
|
|
3.1.1 Outline ...................................................................................................................... |
3-1 |
|
|
3.1.2 Original feed motor drive section.............................................................................. |
3-2 |
|
|
3.1.3 Read motor drive section ......................................................................................... |
3-3 |
|
3.2 |
Original Size Detection ........................................................................................................ |
3-4 |
|
|
3.2.1 Outline ...................................................................................................................... |
3-4 |
|
|
3.2.2 Original tray width sensor......................................................................................... |
3-4 |
|
3.3 |
FLOW CHART..................................................................................................................... |
3-5 |
|
3.4 |
DESCRIPTION OF CIRCUIT............................................................................................... |
3-9 |
|
|
3.4.1 Drive Circuit for Feed Motor ..................................................................................... |
3-9 |
|
|
3.4.2 Drive Circuit for Read Motor................................................................................... |
3-10 |
|
|
3.4.3 Reset Circuit .......................................................................................................... |
3-11 |
|
|
3.4.4 Drive Circuit for Pickup Solenoid ........................................................................... |
3-11 |
4. |
DISASSEMBLY AND ASSEMBLY ............................................................................... |
4-1 |
|
|
4.1 |
Cover ................................................................................................................................... |
4-1 |
|
4.2 |
Roller ................................................................................................................................... |
4-5 |
|
4.3 |
Motor / Motor drive section ............................................................................................... |
4-16 |
|
4.4 |
Solenoid............................................................................................................................. |
4-21 |
|
4.5 |
Sensor/switch .................................................................................................................... |
4-22 |
|
4.6 |
PC Board ........................................................................................................................... |
4-29 |
|
4.7 |
Others................................................................................................................................ |
4-30 |
5. |
ADJUSTMENT .............................................................................................................. |
5-1 |
|
|
5.1 |
Adjustment of Position......................................................................................................... |
5-1 |
|
5.2 |
Adjustment of Height ........................................................................................................... |
5-7 |
|
5.3 |
Adjustment of Skew ............................................................................................................. |
5-9 |
|
5.4 |
Adjustment of the Leading Edge Position.......................................................................... |
5-11 |
|
5.5 |
Adjustment of Horizontal Position...................................................................................... |
5-12 |
|
5.6 |
Adjustment of Copy Ratio.................................................................................................. |
5-13 |
|
5.7 |
Adjustment of ADF Opening/Closing Sensor..................................................................... |
5-14 |
6. |
TROUBLESHOOTING .................................................................................................. |
6-1 |
|
|
6.1 |
Troubleshooting for Mechanical Errors................................................................................ |
6-1 |
|
6.2 |
Troubleshooting for Electrical Errors ................................................................................... |
6-2 |
|
6.3 |
Jam...................................................................................................................................... |
6-3 |
7. MAINTENANCE AND REWRITING ROM .................................................................... |
7-1 |
||
|
7.1 |
Periodic Maintenance .......................................................................................................... |
7-1 |
|
7.2 |
Rewriting ROM (Firmware Updating)................................................................................... |
7-2 |
8. CIRCUIT DIAGRAM / HARNESS DIAGRAM ............................................................... |
8-1 |
||
|
8.1 |
Assembly of PC Board......................................................................................................... |
8-1 |
|
8.2 |
Circuit Diagram .................................................................................................................... |
8-2 |
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
MR-2017/2020 |
||
|
|
|
CONTENTS |
1
8.3 Control PC Board Circuit ..................................................................................................... |
8-4 |
MR-2017/2020 |
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
CONTENTS |
|
2
1. |
SPECIFICATION |
|
|
|
|
|
|
|
1 |
|
Item |
MR-2017 |
|
MR-2020 |
Maximum number of originals |
Up to 100 sheets or 16 mm in height. |
← |
|
|
on the original feeding tray |
* 50 - 80 g/m2 (13.3 - 21.3 lb. Bond) |
|
|
|
Acceptable paper size |
A5-R, A4, A4-R, B5, B5-R, B4, A3, |
← |
|
|
|
|
FOLIO, ST-R, LT, LT-R, LG, LD, COM- |
|
|
|
|
PUTER |
|
|
Acceptable paper weight |
50 - 127 g/m2 |
← |
|
|
|
|
(13.3 lb. Bond - 33.8 lb. Cover) |
|
|
Dimensions |
W600 x D513 x H135 (mm) |
W575 x D528 x H135 (mm) |
||
|
|
* Excluding hinges and original tray |
* |
Excluding original tray |
Weight |
Approx 11 kg |
← |
|
|
Power consumption |
Approx. 30W |
← |
|
|
Power requirements |
DC5 V, DC24 V |
← |
|
|
|
|
* Supplied from the equipment |
|
|
Co-packed items |
Unpacking Instruction (1 set) |
Unpacking Instruction (1 set) |
||
|
|
Charts (A4/LT: 1 sheet each) |
Charts (A4/LT: 1 sheet each) |
|
|
|
Mounting screws (6 pcs) |
Mounting screws (6 pcs) |
|
|
|
Positioning pins (2 pcs) |
Positioning pins (2 pcs) |
|
|
|
Washer (1 pc) |
Washer (1 pc) |
|
|
|
Hinge bracket (1 pc) |
Hinge bracket (1 pc) |
|
|
|
Hinge bracket fixing screw(2 pcs) |
Hinge bracket fixing screw(2 pcs) |
|
|
|
Hinge bracket cover (1 pc) |
Stopper bracket (1 pc) |
|
|
|
Connector cover (1 pc) |
Stopper bracket fixing screw (2 pcs) |
|
|
|
|
Connector cover (1 pc) |
|
Applicable models |
e-STUDIO163/203 |
e-STUDIO181/211 |
||
|
|
e-STUDIO165/205 |
e-STUDIO182/212/242 |
|
|
|
e-STUDIO166/206 |
|
|
|
|
e-STUDIO167/207/237 |
|
|
Remarks |
|
|
|
|
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
MR-2017/2020 |
|
SPECIFICATION |
1 - 1
09/12
MR-2017/2020 |
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
SPECIFICATION |
|
1 - 2
2.GENERAL DESCRIPTION
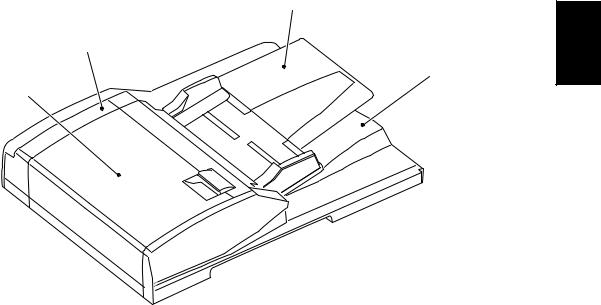
2.1Main Components
|
Original tray section |
Drive/Control section |
2 |
|
Original exit tray section |
Feeding/Transporting section |
|
|
Fig. 2-1 |
|
|
|
|
|
|
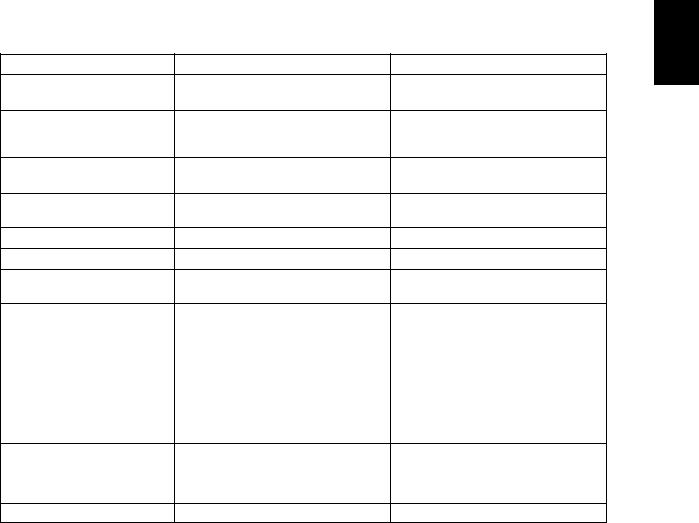
Location |
|
|
Components |
|
|
|
|
Feeding/Transporting |
Pickup roller |
|
Original empty sensor (S3) |
section |
Feed roller |
|
Original registration sensor (S4) |
|
Separation roller |
|
Read sensor (S5) |
|
Registration roller |
|
Original exit sensor (S6) |
|
Intermediate transfer roller |
|
Jam access cover sensor (S7) |
|
Pre-reading roller |
|
|
|
Platen roller |
|
|
|
Post-reading roller |
|
|
|
Exit roller |
|
|
Original tray section |
Original width guide |
|
Original tray sensor (S1) |
|
Original tray |
|
Original tray width sensor (S2) |
Original exit tray section |
Original exit tray |
|
|
|
|
|
|
Drive/Control section |
|
|
Original feed motor (M1) |
|
|
|
Read motor (M2) |
|
|
|
Original pickup solenoid (SOL) |
|
|
|
ADF opening/closing sensor (S8) |
|
|
|
Jam access cover opening/closing switch (SW) |
|
|
|
ADF control PC board (ADF) |
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
MR-2017/2020 |
|
GENERAL DESCRIPTION |
2 - 1
06/09
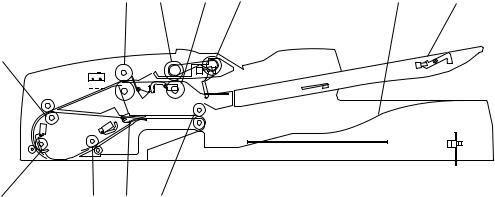
2.2Sectional View
R4 R2 |
R3 R1 |
TRY2 |
TRY1 |
R5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R6 |
R7 |
FLP R8 |
|
|
|
|
|||||||||||||
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fig. 2-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TRY1 |
|
Original tray |
|
|
|
|
|
|
|
|
|
|
|
|
|
R4 |
Registration roller |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TRY2 |
|
Original exit tray |
|
|
|
|
|
|
|
|
|
|
R5 |
Intermediate transfer roller |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
FLP |
|
Exit gate |
|
|
|
|
|
|
|
|
|
|
|
|
|
R6 |
Pre-reading roller |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R1 |
|
Pickup roller |
|
|
|
|
|
|
|
|
|
|
|
|
|
R7 |
Post-reading roller |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
Feed roller |
|
|
|
|
|
|
|
|
|
|
|
|
|
R8 |
Exit roller |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R3 |
|
Separation roller |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MR-2017/2020 |
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
GENERAL DESCRIPTION |
|
2 - 2
06/09
2.3Electric Parts Layout
SW M1 SOL |
S7 ADF |
S8 |
S2 |
S1 |
2 |
M2 |
S5 |
S6 |
S4 |
S3 |
Fig. 2-3
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
MR-2017/2020 |
|
GENERAL DESCRIPTION |
2 - 3
06/09
2.4Symbols and Functions of Various Components
1) Motors
Symbol |
Name |
Function |
|
|
|
M1 |
Original feed motor |
Drives the original feed roller, pickup roller and registration roller. |
|
|
|
M2 |
Read motor |
Transports originals by driving the intermediate transport roller, front |
|
|
read roller, rear read roller and exit roller. |
2) Sensors and Switches
Symbol |
Name |
Function |
|
|
|
S1 |
Original tray sensor |
Detects the length of the original set on the original tray. |
|
|
|
S2 |
Original tray width sensor |
Detects the width of the original set on the original tray. |
|
|
|
S3 |
Original empty sensor |
Detects the original set on the original tray. |
|
|
|
S4 |
Original registration sensor |
Detects transport of the original at the registration roller section. |
|
|
|
S5 |
Read sensor |
Detects the leading edge of the original at the original scanning section. |
|
|
|
S6 |
Original exit sensor |
Detects the exit (transit) of an original. |
|
|
|
S7 |
Jam access cover sensor |
Detects opening/closing of the Jam access cover. |
|
|
|
S8 |
ADF opening/closing sensor |
Detects opening/closing of the ADF. |
|
|
|
SW |
Jam access cover opening/ |
Switches between cutoff and supply state of the 24 V power by open- |
|
closing switch |
ing/closing of the jam access cover. |
3) |
Solenoid |
|
|
Symbol |
Name |
Function |
|
|
|
|
|
|
SOL |
Original pickup solenoid |
Drives up and down the original pickup roller. |
|
|
|
|
4) |
PC board |
|
|
Symbol |
Name |
Function |
|
|
|
|
|
|
ADF |
ADF control PC board (ADF |
Controls the ADF. |
|
|
board) |
|
MR-2017/2020 |
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
GENERAL DESCRIPTION |
|
2 - 4
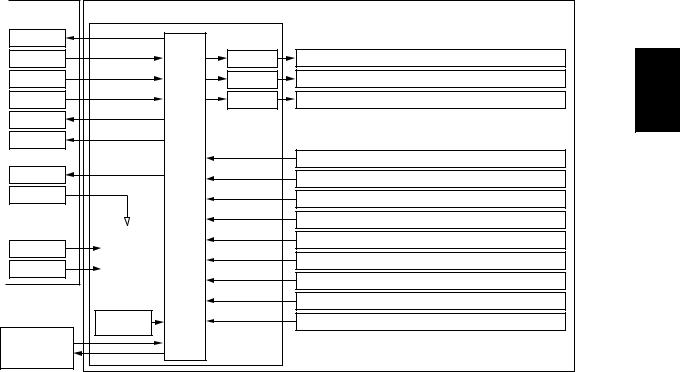
2.5Diagram of Signal Blocks
Equipment |
ADF |
|
|
|
RxD |
|
|
|
|
TxD |
|
Driver |
Original feed motor (M1) |
|
REQ |
|
Driver |
Read motor (M2) |
2 |
ACK |
|
Driver |
Original pickup solenoid (SOL) |
|
|
|
|||
DF-REQ |
|
|
|
|
DF-ACK |
|
|
|
|
|
|
|
Original tray sensor (S1) |
|
SCAN-ST |
|
|
Original tray width sensor (S2) |
|
|
|
|
|
|
CNT |
CPU |
|
Original empty sensor (S3) |
|
|
|
|
Original registration sensor (S4) |
|
DC 24V |
|
|
Read sensor (S5) |
|
|
|
Original exit sensor (S6) |
|
|
DC 5V |
|
|
|
|
|
|
Jam access cover sensor (S7) |
|
|
|
|
|
|
|
|
|
|
RADF opening/closing sensor (S8) |
|
|
Reset IC |
|
Jam access cover opening/closing switch (SW) |
|
Downlad jig |
|
|
|
|
|
|
Fig. 2-4 |
|
|
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
MR-2017/2020 |
|
GENERAL DESCRIPTION |
2 - 5
09/12
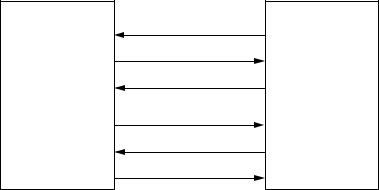
2.6Description of Interface Signals
The following 6 lines are used to transmit/receive signals between the equipment and the ADF.
REQ ...................... |
Communication request signal (from equipment to the ADF) |
DF-REQ ................ |
Communication request signal (from the ADF to equipment) |
DF-ACK................. |
Communication request acknowledging signal (from the ADF to equipment) |
ACK....................... |
Communication request acknowledging signal (from equipment to the ADF) |
TxD ....................... |
Data transmitted from equipment to the ADF |
RxD ....................... |
Data transmitted from the ADF to equipment |
Data communication (RxD and TxD) between the scanner and the ADF has adopted the serial communication system which does not allow checking using testing devices to see whether the signals are transmitted/received properly in the field.
RADF |
Equipment |
REQ
DF-ACK
TxD
DF-REQ
ACK
RxD
Fig. 2-5
MR-2017/2020 |
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
GENERAL DESCRIPTION |
|
2 - 6
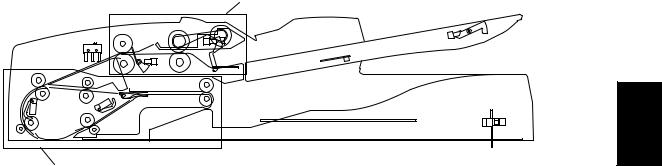
3.DESCRIPTION OF OPERATIONS
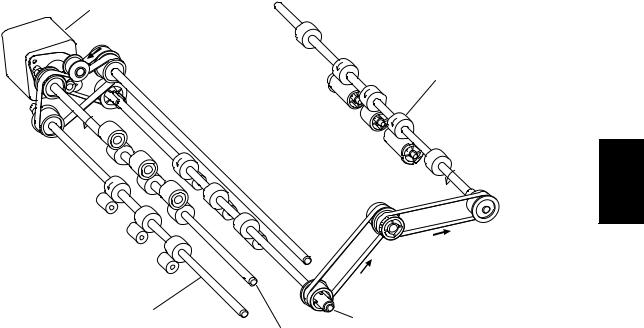
3.1DRIVE SYSTEM
Feed motor drive section
3
Read motor drive section
Fig. 3-1
3.1.1Outline
Originals are transported by the original feed motor and read motor. Each motor has a drive section for the following operations:
Original feed motor drive section: Read motor drive section:
picks up originals and drives the registration roller. transports originals and drives parts such as the exit roller.
The Original feed motor rotates reversely when the originals are being transported at the registration roller, compared to its rotational direction when they are being picked up.
The read motor always rotates in a constant direction.
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
MR-2017/2020 |
|
DESCRIPTION OF OPERATIONS |
3 - 1
06/09
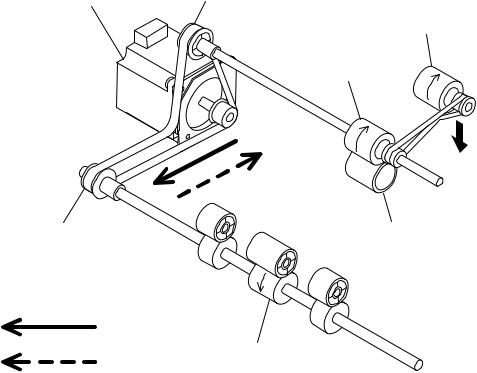
3.1.2Original feed motor drive section
Original feed motor |
Oneway clutch |
Pickup roller
Feed roller
Oneway clutch |
Separation roller |
Pickup
Registration roller
Feed
Fig. 3-2
When an original is placed on the original tray and the RADF receives a feed request signal from the equipment, the feeding of the original is started.
The original empty sensor detects the presence of the original, and then the pickup roller is lowered by the drive from the original pickup solenoid.
The Original feed motor rotates, and the pickup roller and the feed roller then rotate in a normal direction (shown in a solid line in the figure) to guide the original into the transport path. Then the original is transported to the registration roller to be aligned.
The original aligned with the registration roller is then transported by the reverse rotation of the Original feed motor (shown in a dotted line in the figure).
A one-way clutch is installed inside of each gear of the feed roller and the registration roller, so these gears will not be driven in a reverse rotation.
When the original empty sensor detects that there is no original on the original tray, the original pickup solenoid is turned OFF and the pickup roller is raised.
The original pickup solenoid is the one can operate both suction and recovery.
MR-2017/2020 |
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
DESCRIPTION OF OPERATIONS |
|
3 - 2
3.1.3Read motor drive section
Read motor
Exit roller
3 |
Pre-reading roller |
Post-reading roller |
|
|
|
Intermediate transfer roller |
The transported original is driven by the read motor.
Then the original is transported to a scanning start position by the intermediate transfer roller and prereading roller.
The original transported to the scanning start position is then scanned in the scanner function of the equipment.
When the data of the original have been scanned, the original is then transported to the original exit tray side by the post-reading roller.
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
MR-2017/2020 |
|
DESCRIPTION OF OPERATIONS |
3 - 3
06/09
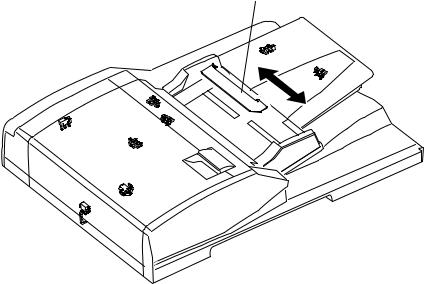
3.2Original Size Detection
Original tray width sensor
Fig. 3-3
3.2.1Outline
When an original is placed on the original tray, the width of the original is detected by the positions of the original width guides.
3.2.2Original tray width sensor
The original tray width sensor detects the width of an original placed on the original tray.
It is detected by the brush attached to the rack moving on the original tray width sensor, which is a board with the different length of the patterns written.
This brush is moved as the original width guide is moved. Signals (TWID0S, TWID1S, TWID2S) are opened and shorted to SG by this movement.
The combination of these short (= low level) and open (= high level) can determine the width of the original.
Sizes detectable in combination of these open and short of the signals are as follows:
TWID2S |
TWID1S |
TWID0S |
|
Original width size |
Original width size |
(Orange) |
(Yellow) |
(Gray) |
|
(LT series) |
(A4 series) |
H |
H |
H |
|
LD / LT |
A3 / A4 |
H |
H |
L |
|
- |
B5-R |
H |
L |
H |
|
ST-R |
A5-R |
L |
H |
H |
|
LD / LT |
A3 / A4 |
L |
H |
L |
|
- |
Postcard |
L |
L |
H |
8.5x8.5 / LT-R / KLG / 13”LG |
A4-R / FOLIO |
|
L |
L |
L |
|
COMPUTER |
B4 / B5 |
|
H (= high level): Open |
L (= low level): Short |
|
||
MR-2017/2020 |
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
DESCRIPTION OF OPERATIONS |
|
3 - 4
06/09
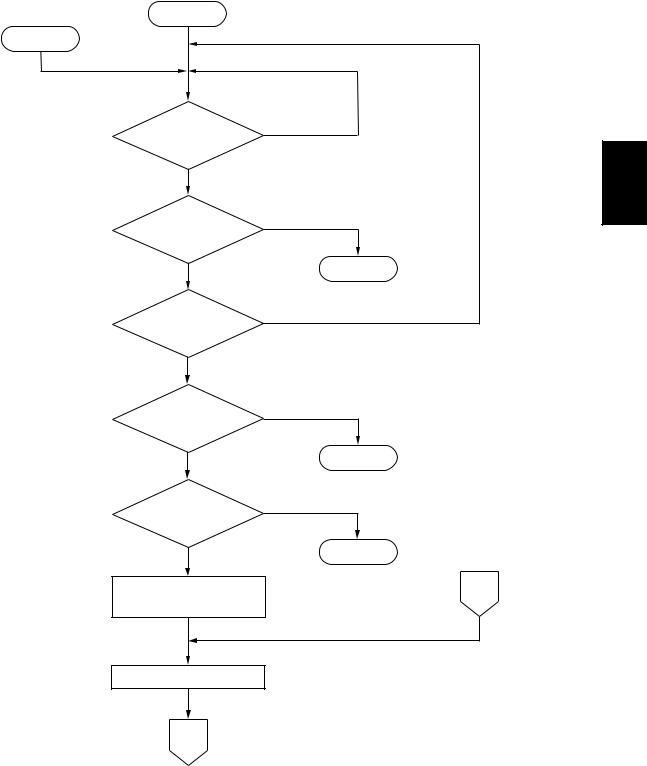
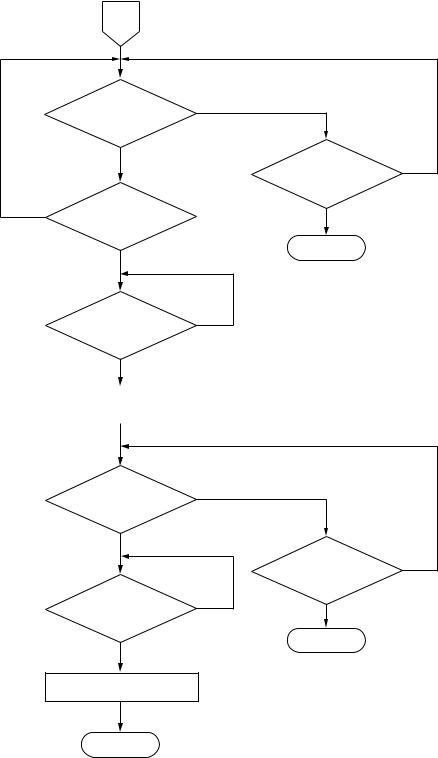
3.3FLOW CHART
Power ON
Standby
ADF jam access |
YES |
cover OPEN? |
|
NO |
3 |
|
|
All sensors OFF? |
NO |
|
|
YES |
Jam |
Empty sensor ON? |
NO |
|
|
YES |
|
Feed request |
NO |
signal received? |
|
YES |
Standby |
Original on |
NO |
feeding tray? |
|
YES |
Jam |
|
|
Pickup solenoid ON, |
D |
pickup roller goes down. |
|
Feed motor rotates forward.
A
Fig. 3-4
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
MR-2017/2020 |
|
DESCRIPTION OF OPERATIONS |
3 - 5
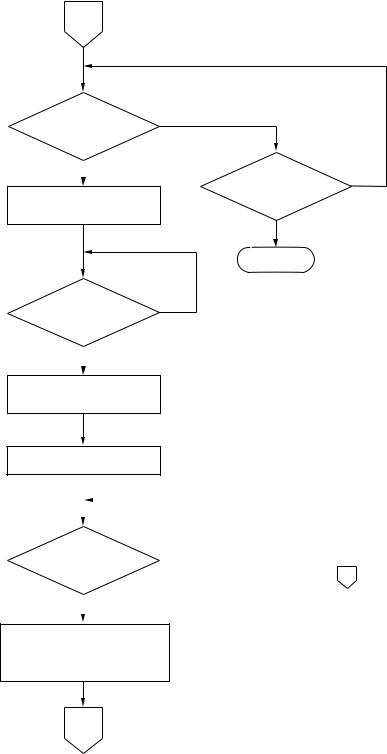
A
Original |
|
registration |
NO |
|
|
||
sensor |
|
ON? |
|
|
|
YES |
|
|
|
|
|
Feed motor stops after transporting for a certain period of time.
A certain period |
NO |
|
of time passed? |
|
|
|
YES |
|
|
|
|
|
|
|
Registration roller rotates. (Feed motor rotates reverse.)
Read motor rotates.
|
|
|
|
|
|
|
|
|
|
Paper transprted |
NO |
|||
before the intermideate |
||||
|
||||
transport roller? |
|
|||
|
YES |
|
||
|
|
|||
|
|
|
|
|
Feed motor rotation speed switches. First scan: Highest speed
Second scan/later: Requested speed
B
A certain period |
NO |
of time passed? |
|
YES
Jam
Monitoring registration sensor by parallel processing.
Feed motor stops when registration sensor detects trailing edge of original. Skip to D .
Fig. 3-5
MR-2017/2020 |
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
DESCRIPTION OF OPERATIONS |
|
3 - 6
B
Original |
intermediate |
NO |
transport |
sensor ON? |
|
|
YES |
|
|
|
|
|
|
|
Feed motor and read motor |
|
|
stop after transporting for |
|
|
certain period of time. |
|
|
|
|
|
A certain period |
NO |
3 |
of time passed? |
|
|
YES |
|
|
Jam
Feed request signal |
NO |
|
|
received? |
|
YES
Registration roller also rotates, while read motor rotates
and registration sensor ON.
|
|
|
|
|
Transport for |
NO |
|||
a certain amount of |
||||
|
||||
distance completed? |
|
|||
|
YES |
|
||
|
|
|||
|
|
|
|
|
Scanning start signal |
Exposure and scanning start. |
||
sent (level: High) |
|||
|
|||
|
|
|
|
|
|
|
|
C
Fig. 3-6
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
MR-2017/2020 |
|
DESCRIPTION OF OPERATIONS |
3 - 7
C |
|
|
Original exit |
NO |
|
sensor ON? |
|
|
YES |
|
|
|
A certain period |
NO |
|
of time passed? |
|
NO |
YES |
|
Read sensor OFF? |
|
|
|
|
|
YES |
Jam |
|
|
|
A certain period |
NO |
of time passed? |
|
YES
Scanning start signal |
Scanning completed. |
|
sent (level: Low) |
||
|
||
|
|
D |
NO |
|
Original exit |
|
|
sensor OFF? |
|
|
YES |
|
|
|
A certain period |
NO |
|
of time passed? |
|
Transport for |
NO |
|
a certain amount of |
|
|
YES |
|
|
distance completed? |
|
|
|
|
Jam
YES
Read motor stops.
END
Fig. 3-7
MR-2017/2020 |
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
DESCRIPTION OF OPERATIONS |
|
3 - 8
3.4DESCRIPTION OF CIRCUIT
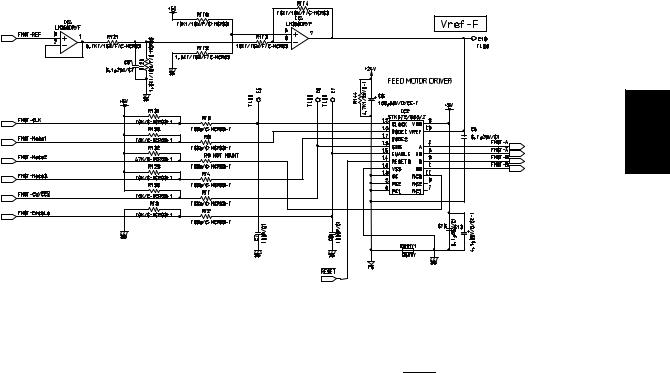
3.4.1Drive Circuit for Feed Motor
3 |
Fig. 3-8
This circuit controls the rotation/stoppage and the direction of rotation, excitation mode and motor current of the feed motor.
A drive clock signal (FMOT-CLK) and rotation direction signal (FMOT-CW/CCW) are input to control the speed and direction of the motor rotation.
When the level of the enabling signal (FMOT-Enable) is set to "L", motor current is turned OFF regardless of the state of other signals.
For the excitation mode, either of 2 phase excitation or 1-2 phase excitation can be selected using the excitation switching signal (FMOT-Mode1/FMOT-Mode2).
The edge switching signal (FMOT-Mode3) is used to specify the switching timing for excitation phase either from when both the rise and decay edge of the CLK input are detected or when only the rising edge is detected.
Motor current value can be set discretionary by changing the level of the reference setting signal (FMOT-REF).
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
MR-2017/2020 |
|
DESCRIPTION OF OPERATIONS |
3 - 9
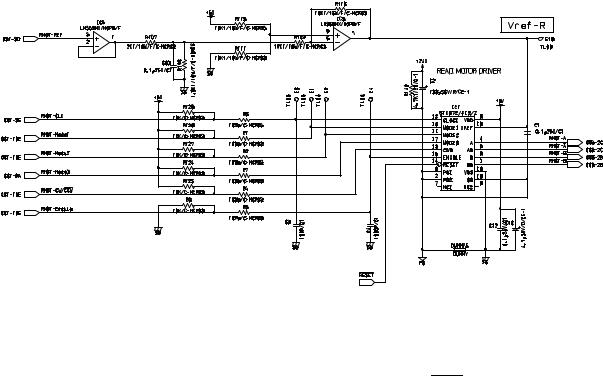
3.4.2Drive Circuit for Read Motor
Fig. 3-9 |
This circuit controls the rotation/stoppage and the direction of rotation, excitation mode and motor current of the read motor.
A drive clock signal (RMOT-CLK) and rotation direction signal (RMOT-CW/CCW) are input to control the speed and direction of the motor rotation.
When the level of the enabling signal (RMOT-Enable) is set to "L", motor current is turned to OFF regardless of the state of other signals.
For the excitation mode, either of 2 phase excitation, 1-2 phase excitation, W1-2 phase excitation, 2W1-2 phase excitation or the 4W1-2 phase excitation can be selected using the excitation switching signal (RMOT-Mode1/RMOT-Mode2).
The edge switching signal (RMOT-Mode3) is used to specify the switching timing for excitation phase either from when both the rise and decay edge of the CLK input are detected or when only the rising edge is detected.
Motor current value can be set discretionary by changing the level of the reference setting signal (RMOT-REF).
MR-2017/2020 |
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
DESCRIPTION OF OPERATIONS |
|
3 - 10
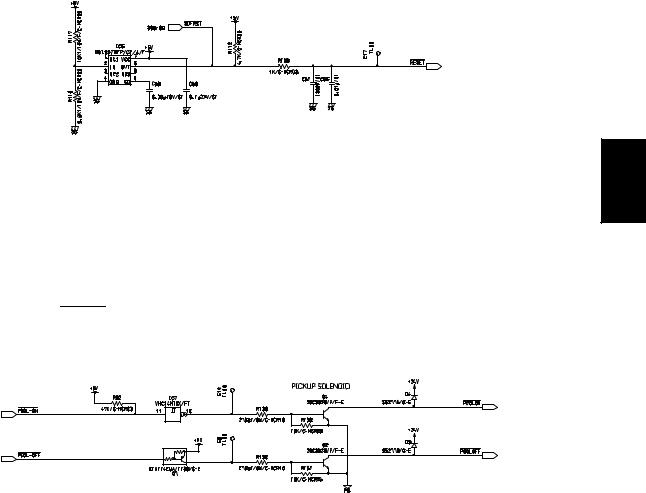
3.4.3Reset Circuit
Fig. 3-10
3
This circuit generates a reset signal when the power is turned ON and the power voltage is blocked or cut off/lowered temporarily.
At the power-ON, the circuit shifts the level of the reset signal from “L” to “H” to put the CPU in a operative state after the reset pulse duration (Tpd) determined by the capacitance of C58 has passed from when the power voltage has reached the supervisory voltage (Vs) divided by R116 and R117.
When a power voltage drop (cutoff, temporary cutoff, temporary low voltage) occurs and the power voltage becomes lower than the set value for the supervisory voltage for the power, the circuit sets the level of the reset signal (RESET) to “L” to put the CPU in a halt state.
3.4.4Drive Circuit for Pickup Solenoid
Fig. 3-11
Pick up solenoid is a two-way solenoid that can be operated both in suction and recovery, and driven by two transistors (Q4 and Q2) for each operation respectively.
When the PSOL-ON-Signal level is set to “L”, Q4 is turned ON, the power of 24V is applied to the coil for suction operation, the solenoid is turned ON, and then the pickup roller goes down.
When the PSOL-ON-Signal level is set to “L”, Q2 is turned ON, the power of 24V is applied to the coil for recovery operation, the solenoid is turned OFF, and then the pickup roller goes up.
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
MR-2017/2020 |
|
DESCRIPTION OF OPERATIONS |
3 - 11
MR-2017/2020 |
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
DESCRIPTION OF OPERATIONS |
|
3 - 12

4.DISASSEMBLY AND ASSEMBLY
4.1Cover
[A]Front cover
(1)Open the RADF and remove 3 screws.
(2)Close the RADF.
(3)Open the jam access cover and remove 2 screws.
Fig. 4-1 |
Fig. 4-2 |
4 |
(4) Take off the front cover toward you. |
Front cover |
Fig. 4-3 |
© 2005 - 2009 TOSHIBA TEC CORPORATION All rights reserved |
MR-2017/2020 |
|
DISASSEMBLY AND ASSEMBLY |
4 - 1
06/09
Loading...