

Page 1
Quick Start
!
PowerFlex® 40P Adjustable
Frequency AC Drive
FRN 1.xx - 3.xx
This Quick Start guide summarizes the basic steps needed to install,
start-up and program the PowerFlex 40P Adjustable Frequency AC
Drive. The information provided Does Not replace the User Manual
and is intended for qualified drive service personnel only.
For detailed PowerFlex 40P information including EMC instructions,
application considerations and related precautions, refer to the
PowerFlex 40P User Manual, Publication 22D-UM001… at
www.rockwellautomation.com/literature.
General Precautions
ATTENTION: The drive contains high voltage capacitors which take
time to discharge after removal of mains supply. Before working on
drive, ensure isolation of mains supply from line inputs [R, S, T (L1,
L2, L3)]. Wait three minutes for capacitors to discharge to safe voltage
levels. Failure to do so may result in personal injury or death.
Darkened display LEDs is not an indication that capacitors have
discharged to safe voltage levels.
ATTENTION: Equipment damage and/or personal injury may result
if parameter A092 [Auto Rstrt Tries] or A094 [Start At PowerUp] is
used in an inappropriate application. Do not use this function without
considering applicable local, national and international codes,
standards, regulations or industry guidelines.
ATTENTION: Only qualified personnel familiar with adjustable
frequency AC drives and associated machinery should plan or
implement the installation, start-up and subsequent maintenance of the
system. Failure to comply may result in personal injury and/or
equipment damage.
ATTENTION: This drive contains ESD (Electrostatic Discharge)
sensitive parts and assemblies. Static control precautions are required
when installing, testing, servicing or repairing this assembly.
Component damage may result if ESD control procedures are not
followed. If you are not familiar with static control procedures,
reference A-B publication 8000-4.5.2, “Guarding Against Electrostatic
Damage” or any other applicable ESD protection handbook.
ATTENTION: An incorrectly applied or installed drive can result in
component damage or a reduction in product life. Wiring or application
errors, such as, undersizing the motor, incorrect or inadequate AC
supply, or excessive ambient temperatures may result in malfunction of
the system.
ATTENTION: Risk of injury or equipment damage exists. Drive does
not contain user-serviceable components. Do not disassemble drive
chassis.
Page 2
English-2
25 mm
(1.0 in.)
120 mm
(4.7 in.)
120 mm
(4.7 in.)
120 mm
(4.7 in.)
120 mm
(4.7 in.)
RUN
REV
FAULT
RUN
REV
FAULT
RUN
REV
FAULT
RUN
REV
FAULT
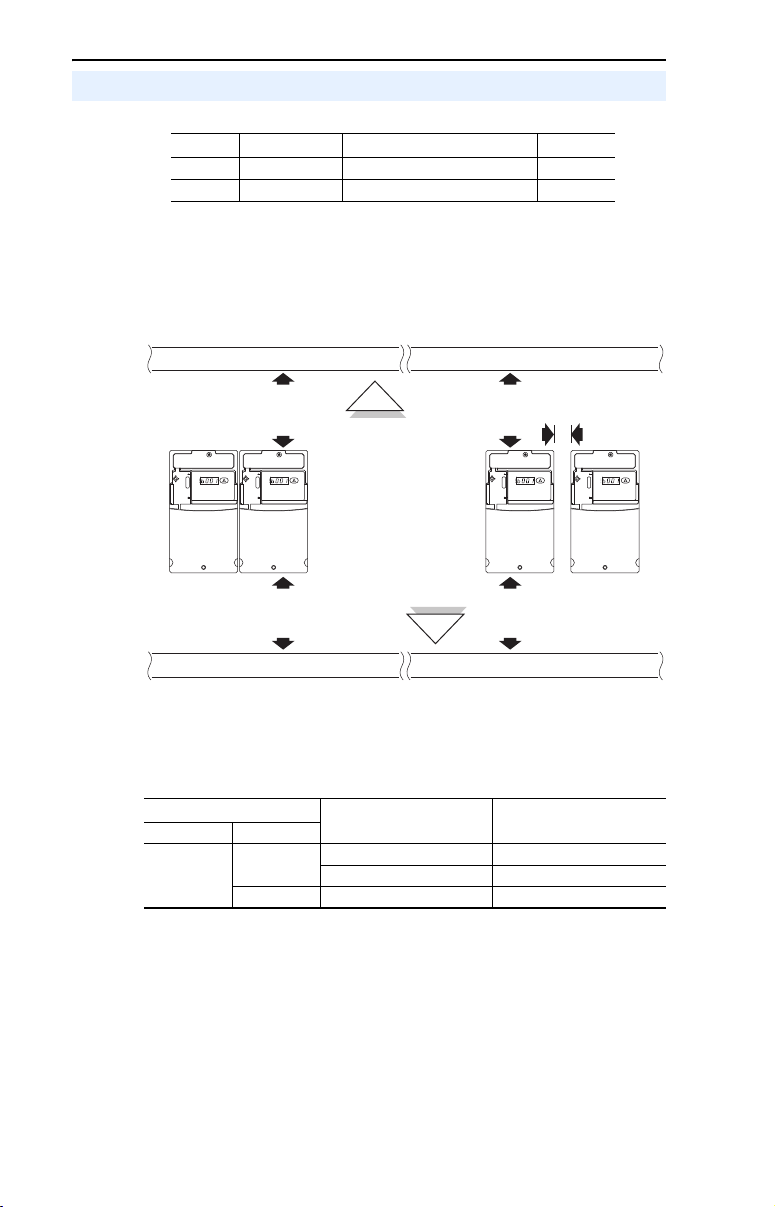
Mounting Option A
No clearance required
between drives.
Mounting Option B
Closest object that
may restrict air flow
through the drive heat
sink and chassis
Mounting Considerations
• Mount the drive upright on a flat, vertical and level surface.
Frame Screw Size Screw Torque DIN Rail
B M4 (#8-32) 1.56-1.96 N-m (14-17 lb.-in.) 35 mm
C M5 (#10-24) 2.45-2.94 N-m (22-26 lb.-in.) –
• Protect the cooling fan by avoiding dust or metallic particles.
• Do not expose to a corrosive atmosphere.
• Protect from moisture and direct sunlight.
Minimum Mounting Clearances
See page 21 for mounting dimensions.
Ambient Operating Temperatures
(1)
Ambient Temperature Enclosure Rating Minimum Mounting
Minimum Maximum
-10°C (14°F)
40°C (104°F)
IP 20/Open Type Use Mounting Option A
IP 30/NEMA 1/UL Type 1
Clearances
(1)
Use Mounting Option B
50°C (122°F) IP 20/Open Type Use Mounting Option B
Rating requires installation of the PowerFlex 40P IP 30/NEMA 1/UL Type 1 option kit.
Page 3
English-3
SHLD
U/T1
V/T2
W/T3
R/L1
S/L2
T/L3
RUN
REV
FAULT
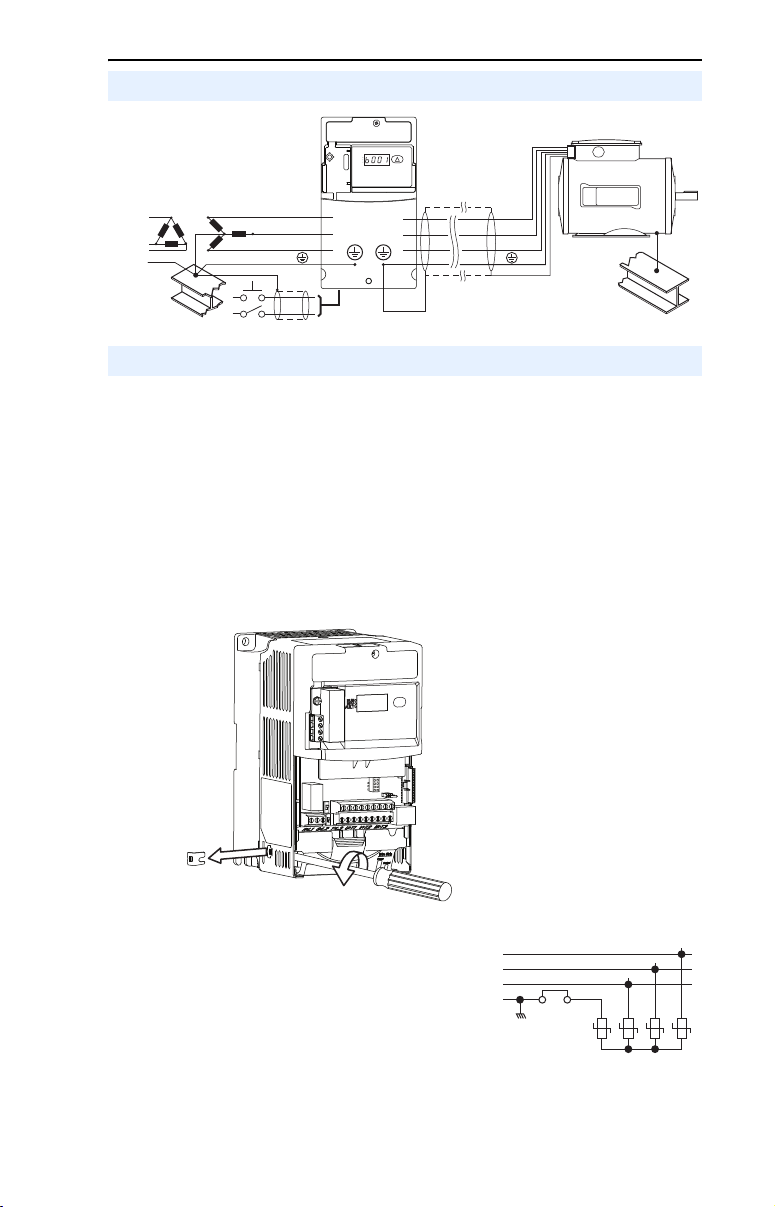
Typical Grounding
Disconnecting MOVs
To prevent drive damage, the MOVs connected to ground shall be
disconnected if the drive is installed on an ungrounded distribution
system where the line-to-ground voltages on any phase could exceed
125% of the nominal line-to-line voltage. To disconnect these devices,
remove the jumper shown in the figures below.
1. Turn the screw counterclockwise to loosen.
2. Pull the jumper completely out of the drive chassis.
3. Tighten the screw to keep it in place.
Jumper Location
Phase to Ground MOV Removal
Three-Phase
Important: Tighten screw after jumper removal.
AC Input
R/L1
S/L2
T/L3
Jumper
1234
Page 4
English-4
CE Conformity
Refer to the PowerFlex 40P User Manual for details on how to comply
with the Low Voltage (LV) and Electromagnetic Compatibility (EMC)
Directives.
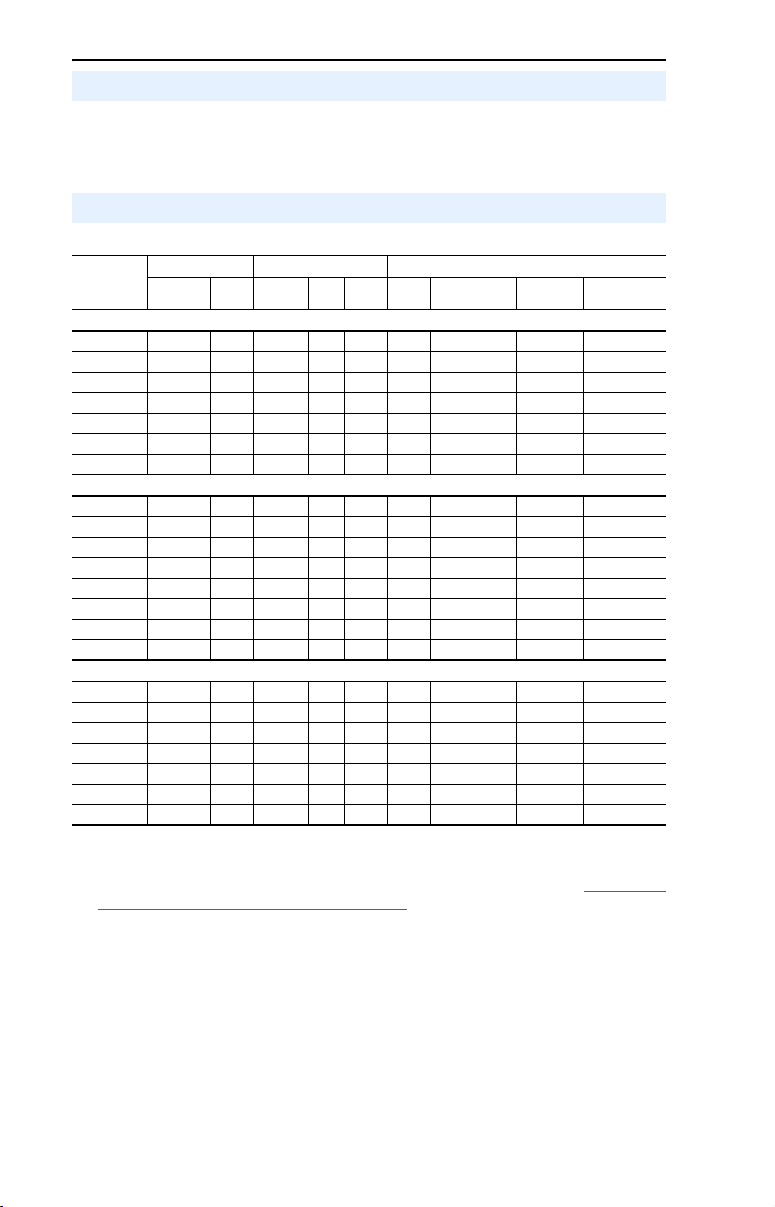
Specifications, Fuses and Circuit Breakers
Drive Ratings
Catalog
Number
200 - 240V AC (±10%) – 3-Phase Input, 0 - 230V 3-Phase Output
22D-B2P3 0.4 (0.5) 2.3 180-264 1.15 2.5 6 140M-C2E-B40 100-C07 1655
22D-B5P0 0.75 (1.0) 5.0 180-264 2.45 5.7 10 140M-C2E-C10 100-C09 1655
22D-B8P0 1.5 (2.0) 8.0 180-264 4.0 9.5 15 140M-C2E-C16 100-C12 1655
22D-B012 2.2 (3.0) 12.0 180-264 5.5 15.5 25 140M-C2E-C16 100-C23 1655
22D-B017 3.7 (5.0) 17.5 180-264 8.6 21.0 30 140M-F8E-C25 100-C23 1655
22D-B024 5.5 (7.5) 24.0 180-264 11.8 26.1 40 140M-F8E-C32 100-C37 2069
22D-B033 7.5 (10.0) 33.0 180-264 16.3 34.6 60 140M-G8E-C45 100-C60 2069
380 - 480V AC (±10%) – 3-Phase Input, 0 - 460V 3-Phase Output
22D-D1P4 0.4 (0.5) 1.4 342-528 1.4 1.8 3 140M-C2E-B25 100-C07 1655
22D-D2P3 0.75 (1.0) 2.3 342-528 2.3 3.2 6 140M-C2E-B40 100-C07 1655
22D-D4P0 1.5 (2.0) 4.0 342-528 4.0 5.7 10 140M-C2E-B63 100-C09 1655
22D-D6P0 2.2 (3.0) 6.0 342-528 5.9 7.5 15 140M-C2E-C10 100-C09 1655
22D-D010 4.0 (5.0) 10.5 342-528 10.3 13.0 20 140M-C2E-C16 100-C23 1655
22D-D012 5.5 (7.5) 12.0 342-528 11.8 14.2 25 140M-D8E-C20 100-C23 2069
22D-D017 7.5 (10.0) 17.0 342-528 16.8 18.4 30 140M-D8E-C20 100-C23 2069
22D-D024 11.0 (15.0) 24.0 342-528 23.4 26.0 50 140M-F8E-C32 100-C43 2069
460 - 600V AC (±10%) – 3-Phase Input, 0 - 575V 3-Phase Output
22D-E1P7 0.75 (1.0) 1.7 414-660 2.1 2.3 6 140M-C2E-B25 100-C09 1655
22D-E3P0 1.5 (2.0) 3.0 414-660 3.65 3.8 6 140M-C2E-B40 100-C09 1655
22D-E4P2 2.2 (3.0) 4.2 414-660 5.2 5.3 10 140M-D8E-B63 100-C09 1655
22D-E6P6 4.0 (5.0) 6.6 414-660 8.1 8.3 15 140M-D8E-C10 100-C09 1655
22D-E9P9 5.5 (7.5) 9.9 414-660 12.1 11.2 20 140M-D8E-C16 100-C16 2069
22D-E012 7.5 (10.0) 12.2 414-660 14.9 13.7 25 140M-D8E-C16 100-C23 2069
22D-E019 11.0 (15.0) 19.0 414-660 23.1 24.1 40 140M-F8E-C25 100-C30 2069
(1)
(2)
(3)
(4)
Output Ratings Input Ratings Branch Circuit Protection
(1)
kW (HP) Amps
Voltage
Range kVA Amps Fuses
140M Motor
Protectors
(2) (3)
Contactors
Min. Enclosure
Vol um e
Ratings apply to all drive types; Panel Mount (N104), Flange Mount (F104), and Plate Drive
(H204).
The AIC ratings of the Bulletin 140M Motor Protector Circuit Breakers may vary. See Bulletin 140M
Motor Protection Circuit Breakers Application Ratings.
Manual Self-Protected (Type E) Combination Motor Controller, UL listed for 208 Wye or Delta, 240
Wye or Delta, 480Y/277 or 600Y/347. Not UL listed for use on 480V or 600V Delta/Delta, corner
ground, or high-resistance ground systems.
When using a Manual Self-Protected (Type E) Combination Motor Controller, the drive must be
installed in a ventilated or non-ventilated enclosure with the minimum volume specified in this
column. Application specific thermal considerations may require a larger enclosure.
(4)
(in.3)
Page 5
English-5
TUV
Rheinland
Product Safety
.
.
Production inspected
W
E
C
TUV
Rheinland
.
.
Functional
Safety
Bauart geprüft
Type approved
EN 50178
Category Specification
Agency
Certification
The drive is also designed to meet the appropriate portions of the following specifications:
NFPA 70 - US National Electrical Code
NEMA ICS 3.1 - Safety standards for Construction and Guide for Selection, Installation and
Operation of Adjustable Speed Drive Systems.
Protection Bus Overvoltage Trip
IEC 146 - International Electrical Code.
200-240V AC Input:
380-460V AC Input:
460-600V AC Input:
Bus Undervoltage Trip
200-240V AC Input:
380-480V AC Input:
460-600V AC Input
P042 = 3 “High Voltage”:
P042 = 2 “Low Voltage”:
U
CUS
Power Ride-Thru: 100 milliseconds
Logic Control Ride-Thru: 0.5 seconds minimum, 2 seconds typical
Electronic Motor Overload Protection: Provides class 10 motor overload protection according
Overcurrent: 200% hardware limit, 300% instantaneous fault
Ground Fault Trip: Phase-to-ground on drive output
Short Circuit Trip: Phase-to-phase on drive output
Environment Altitude: 1000 m (3300 ft) max. without derating. Above 1000 m
Maximum Surrounding Air Temperature
without derating:
IP20, Open Type:
IP30, NEMA Type 1, UL Type 1:
Flange and Plate Mount:
Cooling Method
Convection:
Fan:
Storage Temperature: –40 to 85 degrees C (–40 to 185 degrees F)
Atmosphere: Important: Drive must
Relative Humidity: 0 to 95% non-condensing
Shock (operating): 15G peak for 11ms duration (±1.0 ms)
Vibration (operating): 1G peak, 5 to 2000 Hz
Listed to UL508C and CAN/CSA-22.2
L
®
Certified to AS/NZS, 1997 Group 1, Class A
Marked for all applicable European Directives
EMC Directive (89/336)
EN 61800-3, EN 50081-1, EN 50082-2
Low Voltage Directive (73/23/EEC)
EN 50178, EN 60204
Certified to ISO 13849-1; Performance Level d (Safety
Category 3).
Meets Functional Safety (FS) when used with the
DriveGuard Safe-Off Option (Series B).
405V DC bus (equivalent to 290V AC incoming line)
810V DC bus (equivalent to 575V AC incoming line)
1005V DC bus (equivalent to 711V AC incoming line)
210V DC bus (equivalent to 150V AC incoming line)
390V DC bus (equivalent to 275V AC incoming line)
487V DC bus (equivalent to 344V AC incoming line)
390V DC bus (equivalent to 275V AC incoming line)
to NEC article 430 and motor over-temperature
protection according to NEC article 430.126 (A) (2).
UL 508C File 29572.
(3300 ft) derate 3% for every 305 m (1000 ft).
–10 to 50° C (14 to 122° F)
–10 to 40° C (14 to 104° F)
Heatsink: –10 to 40° C (14 to 104° F)
Drive: –10 to 50° C (14 to 122° F)
0.4 kW (0.5 HP) drives and all Flange and Plate drives
All other drive ratings
where the ambient atmosphere contains volatile or
corrosive gas, vapors or dust. If the drive is not going
to be installed for a period of time, it must be stored in
an area where it will not be exposed to a corrosive
atmosphere.
not be installed in an area
Page 6
English-6
Category Specification
Electrical Voltage Tolerance: 200-240V ±10%
Frequency Tolerance: 48-63 Hz
Input Phases: Three-phase input provides full rating. Single-phase
Displacement Power Factor: 0.98 across entire speed range
Maximum Short Circuit Rating: 100,000 Amps Symmetrical
Actual Short Circuit Rating: Determined by AIC Rating of installed fuse/circuit
Control Method: Sinusoidal PWM, Volts/Hertz, and Sensorless Vector
Control Inputs Digital: Bandwidth: 10 Rad/Secs for open and closed loop
Encoder Type: Incremental, dual channel
Transistor Type: Isolated Gate Bipolar (IGBT)
Carrier Frequency 2-16 kHz, Drive rating based on 4 kHz.
Frequency Accuracy
Digital Input:
Analog Input:
Analog Output:
Speed Regulation
Open Loop with Slip Compensation:
With Encoder:
Output Frequency: 0-500 Hz (programmable)
Efficiency: 97.5% (typical)
Stop Modes: Multiple programmable stop modes including - Ramp,
Accel/Decel: Four independently programmable accel and decel
Intermittent Overload: 150% Overload capability for up to 1 minute
Electronic Motor Overload Protection Provides class 10 motor overload protection according
Quantity: (2) Semi-programmable
Current: 6 mA
Typ e
Source Mode (SRC):
Analog: Quantity: (2) Isolated, –10 to 10V and 4-20mA
Supply: 12V, 250 mA. 12V, 10 mA minimum inputs isolated
Quadrature: 90°, ±27 degrees at 25 degrees C.
Duty Cycle: 50%, +10%
Requirements: Encoders must be line driver type, quadrature (dual
Sink Mode (SNK):
Specification
Resolution:
0 to 10V DC Analog:
4-20mA Analog:
External Pot:
380-480V ±10%
460-600V ±10%
operation provides 35% rated current.
breaker
Within ±0.05% of set output frequency
Within 0.5% of maximum output frequency, 10-Bit
resolution
±2% of full scale, 10-Bit resolution
±1% of base speed across a 80:1 speed range
±0.3% of base speed across a 80:1 speed range
±0.05% of base speed across a 20:1 speed range
Coast, DC-Brake, and Ramp-to-Stop
times. Each time may be programmed from 0 - 600
seconds in 0.1 second increments.
200% Overload capability for up to 3 seconds
to NEC article 430 and motor over-temperature
protection according to NEC article 430.126 (A) (2).
UL 508C File 29572.
(5) Programmable
18-24V = ON, 0-6V = OFF
0-6V = ON, 18-24V = OFF
10-bit
100k ohm input impedance
250 ohm input impedance
1-10k ohm, 2 Watt minimum
with differential transmitter, 250 kHz maximum.
channel) or pulse (single channel), 3.5-26V DC output,
single-ended or differential and capable of supplying a
minimum of 10 mA per channel. Allowable input is DC
up to a maximum frequency of 250 kHz. The encoder
I/O automatically scales to allow 5V, 12V and 24V DC
nominal voltages.
Page 7
Category Specification
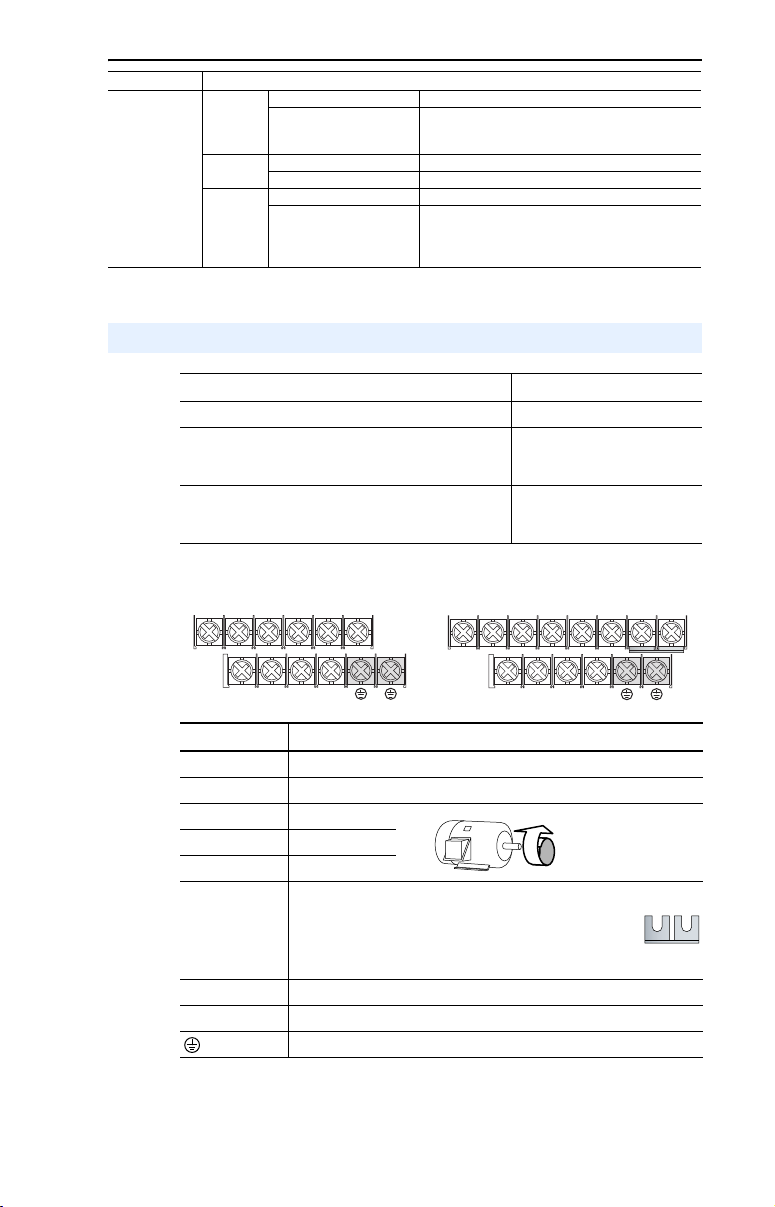
V/T2T/L3S/L2R/L1 U/T1 W/T3
BR+ BR-DC- DC+
V/T2T/L3S/L2R/L1 U/T1 W/T3 P2 P1
BR+ BR-DC- DC+
B Frame C Frame
Control Outputs Relay: Quantity: (1) Programmable Form C
Opto: Quantity:
Analog: Quantity: (1) Non-Isolated 0-10V or 4-20mA
Specification
Resistive Rating:
Inductive Rating:
Specification: 30V DC, 50mA Non-inductive
Specification
Resolution:
0 to 10V DC Analog:
4-20mA Analog:
3.0A at 30V DC, 3.0A at 125V, 3.0A at 240V AC
0.5A at 30V DC, 0.5A at 125V, 0.5A at 240V AC
(2) Programmable
10-bit
1k ohm minimum
525 ohm maximum
Power Wiring
Power Wire Rating Recommended Copper Wire
Unshielded 600V, 75°C (167°F) THHN/THWN 15 Mils insulated, dry location
Shielded 600V, 75°C or 90°C (167°F or 194°F) RHH/
RHW-2
Shielded Tray rated 600V, 75°C or 90°C (167°F or
194°F) RHH/RHW-2
Power Terminal Block
Anixter OLF-7xxxxx,
Belden 29501-29507 or
equivalent
Anixter 7V-7xxxx-3G
Shawflex 2ACD/3ACD or
equivalent
English-7
(1)
Terminal
Description
R/L1, S/L2 1-Phase Input
R/L1, S/L2, T/L3 3-Phase Input
U/T1 To Motor U/T1
V/T2 To Motor V/T2
W/T3 To Motor W/T3
DC Bus Inductor Connection (C Frame drives only.)
P2, P1
The C Frame drive is shipped with a jumper between
Terminals P2 and P1. Remove this jumper only when a DC
Bus Inductor will be connected. Drive will not power up
without a jumper or inductor connected.
DC+, DC- DC Bus Connection
BR+, BR- Dynamic Brake Resistor Connection
Safety Ground - PE
(1)
Important: Terminal screws may become loose during shipment. Ensure that all
terminal screws are tightened to the recommended torque before applying power to
the drive.
(2)
Single-phase operation requires a 65% derate of drive rated current.
(2)
=
Switch any two motor
leads to change
forward direction.
Page 8

English-8
Power Terminal Block Specifications
Frame Maximum Wire Size
2
B 5.3 mm
C 8.4 mm
(1)
Maximum/minimum sizes that the terminal block will accept - these are not
(10 AWG) 1.3 mm2 (16 AWG) 1.7-2.2 N-m (16-19 lb.-in.)
2
(8 AWG) 1.3 mm2 (16 AWG) 2.9-3.7 N-m (26-33 lb.-in.)
(1)
Minimum Wire Size
(1)
Torque
recommendations.
Input Power Conditions
Input Power Condition Corrective Action
Low Line Impedance (less than 1% line reactance) • Install Line Reactor
Greater than 120 kVA supply transformer
• or Isolation Transformer
• or Bus Inductor – 5.5 & 11 kW
(2)
(7.5 & 15 HP) drives only
Line has power factor correction capacitors • Install Line Reactor
Line has frequent power interruptions
• or Isolation Transformer
Line has intermittent noise spikes in excess of
6000V (lightning)
Phase to ground voltage exceeds 125% of normal
line to line voltage
Ungrounded distribution system
240V open delta configuration (stinger leg)
(1)
For drives applied on an open delta with a middle phase grounded neutral system, the
• Remove MOV jumper to ground.
• or Install Isolation Transformer
with grounded secondary if
necessary.
(1)
• Install Line Reactor
phase opposite the phase that is tapped in the middle to the neutral or earth is
referred to as the “stinger leg,” “high leg,” “red leg,” etc. This leg should be identified
throughout the system with red or orange tape on the wire at each connection point.
The stinger leg should be connected to the center Phase B on the reactor. Refer to the
PowerFlex 40P User Manual for specific line reactor part numbers.
(2)
Refer to Appendix B of the PowerFlex 40P User Manual for accessory ordering
information.
Common Bus/Precharge Notes
If drives with internal precharge are used with a disconnect switch to the
common bus, then an auxiliary contact on the disconnect must be
connected to a digital input of the drive. The corresponding input
(parameter A051-A054) must be set to option 29, “Precharge Enable.”
This provides the proper precharge interlock, guarding against possible
damage to the drive when connected to a common DC bus.
Page 9

English-9
I/O Wiring Recommendations
Signal and Control Wire Types
Signal Type/
Where Used
Analog I/O & PTC 8760/9460 0.750 mm2(18AWG), twisted
Remote Pot 8770 0.750 mm2(18AWG), 3
Encoder/Pulse I/O 89730
(1)
Stranded or solid wire.
(2)
9728 or 9730 are equivalent and may be used but may not fit in the drive wire channel.
(3)
If the wires are short and contained within a cabinet which has no sensitive circuits,
Belden Wire Type(s)
(or equivalent)
(2)
the use of shielded wire may not be necessary, but is always recommended.
Recommended Control Wire for Digital I/O
Type Wire Type(s) Description
Unshielded Per US NEC or applicable
national or local code
Shielded Multi-conductor shielded
cable such as Belden
8770(or equiv.)
I/O Terminal Block Specifications
Frame Maximum Wire Size
2
B & C 1.3 mm
(1)
Maximum/minimum sizes that the terminal block will accept - these are not
(16 AWG) 0.2 mm2 (24 AWG) 0.5-0.8 N-m (4.4-7 lb.-in.)
recommendations.
Refer to the PowerFlex 40P User Manual for recommendations on
maximum power and control cable length.
(1)
Description
pair, 100% shield with drain
cond., shielded
0.196 mm2(24AWG),
individually shielded pairs
– 300V,
2
0.750 mm
(18AWG), 3
conductor, shielded.
(1)
Minimum Wire Size
(1)
Torque
Min. Insulation
Rating
300V,
(3)
75-90° C
(167-194° F)
Minimum
Insulation Rating
60 degrees C
(140 degrees F)
Page 10

English-10
30V DC 125V AC 240V AC
Resistive 3.0A 3.0A 3.0A
Inductive 0.5A 0.5A 0.5A
Relay N.O.
Relay Common
Relay N.C.
Control Terminal Block
Control Wiring Block Diagram
0-10V
0-20mA
(6)
SNK
SRC
SRCSNK
30V DC
50mA
Non-inductive
Analog Output Select
+
/-10V
01 02 03 04 05
(1)
Enable Jumper
R1
R2
R3
R1 R2 R3
01
02
03
04
05
06
07
08
09
+24V
11
+10V
12
13
14
10V
15
16
17
18
19
(4)
0-10V
0/4-20mA
11 12 13 14 15
(1)(6)
Stop
Start/Run FWD
Direction/Run REV
Digital Common
Digital Input 1
Digital Input 2
Digital Input 3
Digital Input 4
Opto Common
+24V DC
+10V DC
0-10V (or ±10V) Input
Analog Common
4-20mA Input
Analog Output
Opto Output 1
Opto Output 2
RS485 Shield
Voltage Range Select
06 07 08 09
16 17 18 19
(2)
ENBL
Typical
SRC Wiring
(3)
(4)
(6)
Enable
Jumper
Typical
SNK Wiring
Pot must be
1-10k ohm
2 Watt Min.
Common
RS485
(DSI)
1
(5)
24V
See Control Wiring Block Diagram Notes on next page.
Page 11

English-11
Control Wiring Block Diagram Notes
(1)
Important: I/O Terminal 01 is always a coast to stop input except when P036 [Start
Source] is set to “3-Wire”, “2-W Lvl Sens” or “Momt FWD/REV” control. In three wire
control, I/O Terminal 01 is controlled by P037 [Stop Mode]. All other stop sources are
controlled by P037 [Stop Mode].
P036 [Start Source] Stop I/O Terminal 01 Stop
3-Wire Per P037 Per P037
2-Wire Per P037 Coast
2-W Lvl Sens Per P037 Per P037
2-W Hi Speed Per P037 Coast
RS485 Port Per P037 Coast
Momt FWD/REV Per P037 Per P037
Important: The drive is shipped with a jumper installed between I/O Terminals 01 and
11. Remove this jumper when using I/O Terminal 01 as a stop or enable input.
(2)
Two wire control shown. For three wire control use a momentary input on I/O
Terminal 02 to command a start. Use a maintained input for I/O Terminal 03 to
change direction.
(3)
The function of I/O Terminal 03 is fully programmable. Program with E202 [Digital
Ter m 3 ].
(4)
Match the Voltage Range Select DIP switch setting with the control scheme for proper
Uni-Polar or Bipolar operation.
(5)
When using an opto output with an inductive load such as a relay, install a recovery
diode parallel to the relay as shown, to prevent damage to the output.
(6)
When the ENBL enable jumper is removed, I/O Terminal 01 will always act as a
hardware enable, causing a coast to stop without software interpretation.
(6)
(6)
(6)
Page 12

English-12
Control I/O Terminal Designations
No. Signal Default Description Param.
R1 Relay N.O. Fault Normally open contact for output relay. A055
R2 Relay Common – Common for output relay.
R3 Relay N.C. Fault Normally closed contact for output relay. A055
Analog Output Select
DIP Switch
Sink/Source
DIP Switch
(1)
01 Stop
02 Start/Run FWD Not Active I/O Terminal 03 is fully programmable. Program with
03 Digital Term 3 Not Active P036, P037,
04 Digital Common – For digital inputs. Electronically isolated with digital
05 Digital Input 1 Preset Freq Program with A051 [Digital In1 Sel]. A051
06 Digital Input 2 Preset Freq Program with A052 [Digital In2 Sel]. A052
07 Digital Input 3 Local Program with A053 [Digital In3 Sel]. A053
08 Digital Input 4 Jog Forward Program with A054 [Digital In4 Sel]. A054
09 Opto Common – For opto-coupled outputs. Electronically isolated with
11 +24V DC – Referenced to Digital Common.
12 +10V DC – Referenced to Analog Common.
13 ±10V In
14 Analog Common – For 0-10V In or 4-20mA In. Electronically isolated
15 4-20mA In
16 Analog Output OutFreq 0-10 The default analog output is 0-10V. To covert to a
17 Opto Output 1 MotorRunning Program with A058 [Opto Out1 Sel] A058, A059,
18 Opto Output 2 At Frequency Program with A061 [Opto Out2 Sel] A061, A062,
19 RS485 (DSI) Shield – Terminal should be connected to safety ground - PE
(1)
(2)
(2)
See Footnotes (1) and (6) on page 11.
0-10V In and 4-20mA In are distinct input channels and may be connected simultaneously.
0-10V Sets analog output to either voltage or current. Setting must match
Source (SRC) Inputs can be wired as Sink (SNK) or Source (SRC) via DIP Switch
Coast The factory installed jumper or a normally closed
Not Active For external 0-10V (unipolar) or ±10V (bipolar) input
(2)
Not Active For external 4-20mA input supply
A065 [Analog Out Sel].
setting.
input must be present for the drive to start.
E202 [Digital Term 3]. To disable reverse operation,
see A095 [Reverse Disable].
inputs from analog I/O and opto outputs.
opto outputs from analog I/O and digital inputs.
Drive supplied power for digital inputs.
Maximum output current is 100mA.
Drive supplied power for 0-10V external
potentiometer.
Maximum output current is 15mA.
supply (input impedance = 100k ohm) or
potentiometer wiper.
with analog inputs and outputs from digital I/O and
opto outputs.
(input impedance = 250 ohm).
current value, change the Analog Output Select DIP
Switch to 0-20mA. Program with A065 [Analog Out
Sel]. Max analog value can be scaled with A066
[Analog Out High].
Maximum Load: 4-20mA = 525 ohm (10.5V)
when using the RS485 (DSI) communications port.
0-10V = 1k ohm (10mA)
(1)
P036
P036, P037
A095, E202
P038
P038,
A051-A054,
A123, A132
P038,
A051-A054,
A132
A065, A066
A064
A064
Inputs may be used independently for speed control or jointly when operating in PID mode.
Page 13

English-13
+V Cm B- BA-A
12V
5V
➊
Encoder Interface
The PowerFlex 40P Encoder Interface can source 5 or12 volt power and
accept 5, 12 or 24 volt single ended or differential inputs.
Terminal Description
No. Signal Description
+V 5V-12V Power
Cm Power Return
B- Encoder B (NOT)
B Encoder B
A- Encoder A (NOT)
A Encoder A
(1)
Internal power source 250 mA (isolated).
Quadrature B input.
Single channel, pulse train, or quadrature A input.
➊ Output DIP switch selects 12 or 5 volt power supplied at terminals “+V”
(1)
When using 12V Encoder power, 24V I/O power, maximum output current at I/O
Terminal 11 is 50 mA.
and “Cm” for the encoder.
Important: A quadrature encoder provides rotor speed and direction.
Therefore, the encoder must be wired such that the forward
direction matches the motor forward direction. If the drive
is reading encoder speed but the position regulator or other
encoder function is not working properly, remove power to
the drive and swap the A and A (NOT) encoder channels or
swap any two motor leads. Drives using FRN 2.xx and
greater will fault when an encoder is incorrectly wired and
E216 [Motor Fdbk Type] is set to option 5 “Quad Check”.
Page 14

English-14
!
Prepare For Drive Start-Up
ATTENTION: Power must be applied to the drive to perform the
following start-up procedures. Some of the voltages present are at
incoming line potential. To avoid electric shock hazard or damage to
equipment, only qualified service personnel should perform the
following procedure. Thoroughly read and understand the procedure
before beginning. If an event does not occur while performing this
procedure, Do Not Proceed. Remove All Power including user
supplied control voltages. User supplied voltages may exist even when
main AC power is not applied to the drive. Correct the malfunction
before continuing.
Before Applying Power to the Drive
❏ 1. Confirm that all inputs are connected to the correct terminals and are
secure.
❏ 2. Verify that AC line power at the disconnect device is within the rated
value of the drive.
❏ 3. Verify that any digital control power is 24 volts.
❏ 4. Verify that the Sink (SNK)/Source (SRC) Setup DIP Switch is set to
match your control wiring scheme. See page 10 for location.
Important: The default control scheme is Source (SRC). The Stop
terminal is jumpered to allow starting from comms. If the
control scheme is changed to Sink (SNK), the jumper must
be removed from I/O Terminals 01 and 11 and installed
between I/O Terminals 01 and 04.
❏ 5. Verify that the Stop input is present or the drive will not start.
Important: If I/O Terminal 01 is used as a stop input, the jumper
Applying Power to the Drive
between I/O Terminals 01 and 11 must be removed.
❏ 6. Apply AC power and control voltages to the drive.
Start, Stop, Direction and Speed Control
Factory default parameter values allow the drive to be controlled from
comms. No programming is required to start, stop, change direction and
control speed directly from comms.
Important: To disable reverse operation, see A095 [Reverse Disable].
If a fault appears on power up, refer to page 19 for an explanation of the
fault code. For complete troubleshooting information, refer to the
PowerFlex 40P User Manual.
Page 15

Display/Fault Reset
RUN
REV
FAULT
➊
➋
Menu Description
Basic Display Group (View Only)
Commonly viewed drive operating
conditions.
Advanced Display Group (View Only)
Consists of advanced drive operating
conditions.
Fault Designator
Consists of list of codes for specific fault
conditions. Displayed only when fault is
present.
E201 Option Parameter Set
0
1
2
3
All Basic Display (Group b) and Advanced Display (Group d) parameters
All Basic Display Group (b001-b029) parameters
Basic Display Group parameters b001-b007 and b010
Basic Display Group parameter b001-b004
No. LED LED State Description
Run Status Steady Red Indicates drive is running.
➊
Direction Status Steady Red Indicates drive is running in reverse direction.
Fault Status Flashing Red Indicates drive is faulted.
No. Key Name Description
➋
Flashing Red Drive has been commanded to change direction.
Flashing Red Drive has been commanded to change direction and motor is
decelerating to zero.
Up Arrow Scroll: Press and release to scroll through user-selectable
Display Group and parameters.
Reset: Press and hold for three seconds to clear active fault.
English-15
E201 [LED Display Opt]
Selects which parameters can be viewed by the drive’s LED interface.
Values Default: 2
Drive Programming Tools
For additional drive programming and control, a DSI remote HIM or PC
programming tools (DriveExplorer™ or DriveTools™ SP) should be used.
Description Catalog Number
Converter Module, Serial 22-SCM-232
Converter Module, USB 1203-USB
DriveExplorer Software
DriveTools SP Software
Remote Panel Mount, LCD Display 22-HIM-C2S
Remote Handheld, LCD Display 22-HIM-A3
(1)
Requires a Serial or USB Converter Module.
(1)
(1)
9306-4EXP02ENE
9303-4DTS01ENE
Set Parameter Display Option
Min/Max: 0/3
Display: 1
Page 16

English-16
Basic Display Group
Output Freq b001
Commanded Freq b002
Output Current b003
Basic Program Group Motor NP Volts P031
Advanced Program Group
Digital In1 Sel A051
Digital In2 Sel A052
Digital In3 Sel A053
Digital In4 Sel A054
Relay Out Sel A055
Relay Out Level A056
Opto Out1 Sel A058
Opto Out1 Level A059
Opto Out2 Sel A061
Opto Out2 Level A062
Opto Out Logic A064
Analog Out Sel A065
Analog Out High A066
Accel Time 2 A067
Decel Time 2 A068
Internal Freq A069
Preset Freq 0 A070
Preset Freq 1 A071
Preset Freq 2 A072
Preset Freq 3 A073
Preset Freq 4 A074
Preset Freq 5 A075
Preset Freq 6 A076
Preset Freq 7 A077
Enhanced Program Group
LED Display Opt E201
Digital Term 3 E202
Accel Time 3 E203
Decel Time 3 E204
Accel Time 4 E205
Decel Time 4 E206
Advanced Display Group Drive Status 2 d301
Output Voltage b004
DC Bus Voltage b005
Drive Status b006
Fault 1 Code b007
Fault 2 Code b008
Fault 3 Code b009
Process Display b010
Control Source b012
Motor NP Hertz P032
Motor OL Current P033
Jog Frequency A078
Jog Accel/Decel A079
DC Brake Time A080
DC Brake Level A081
DB Resistor Sel A082
S Curve % A083
Boost Select A084
Start Boost A085
Break Voltage A086
Break Frequency A087
Maximum Voltage A088
Current Limit 1 A089
Motor OL Select A090
PWM Frequency A091
Auto Rstrt Tries A092
Auto Rstrt Delay A093
Start At PowerUp A094
Reverse Disable A095
Flying Start En A096
Compensation A097
SW Current Trip A098
Process Factor A099
Fault Clear A100
Program Lock A101
Tes tp oin t S el A102
Comm Data Rate A103
Comm Node Addr A104
Comm Loss Action A105
Comm Loss Time A106
Comm Format A107
Language A108
Comm Write Mode E207
Power Loss Mode E208
Half Bus Enable E209
Max Traverse E210
Traverse Inc E211
Traverse Dec E212
P Jump E213
Sync Time E214
Speed Ratio E215
Fibers Status d302
Slip Hz Meter d303
Speed Feedback d304
Contrl In Status b013
Dig In Status b014
Comm Status b015
Control SW Ver b016
Drive Type b017
Elapsed Run Time b018
Testpoint Data b019
Analog In 0-10V b020
Minimum Freq P034
Maximum Freq P035
Start Source P036
Stop Mode P037
Speed Reference P038
Anlg Out Setpt A109
Anlg In 0-10V Lo A110
Anlg In 0-10V Hi A111
Anlg In4-20mA Lo A112
Anlg In4-20mA Hi A113
Slip Hertz @ FLA A114
Process Time Lo A115
Process Time Hi A116
Bus Reg Mode A117
Current Limit 2 A118
Skip Frequency A119
Skip Freq Band A120
Stall Fault Time A121
Analog In Loss A122
10V Bipolar Enbl A123
Var PW M D is ab le A124
Torque Perf Mode A125
Motor NP FLA A126
Autotune A127
IR Voltage Drop A128
Flux Current Ref A129
PID Trim Hi A130
PID Trim Lo A131
PID Ref Sel A132
PID Feedback Sel A133
PID Prop Gain A134
PID Integ Time A135
PID Diff Rate A136
PID Setpoint A137
PID Deadband A138
PID Preload A139
Motor Fdbk Type E216
Motor NP Poles E217
Encoder PPR E218
Pulse In Scale E219
Ki Speed Loop E220
Kp Speed Loop E221
Positioning Mode E222
Find Home Freq E223
Find Home Dir E224
Encoder Pos Tol E225
Counts Per Unit E226
Encoder Speed d306
Units Traveled H d308
Units Traveled L d309
Fault 4 Code d310
Fault 5 Code d311
Analog In 4-20mA b021
Output Power b022
Output Powr Fctr b023
Drive Temp b024
Counter Status b025
Timer Status b026
Stp Logic Status b028
Torque Current b029
Accel Time 1 P039
Decel Time 1 P040
Reset To Defalts P041
Voltage Class P042
Motor OL Ret P043
Stp Logic 0 A140
Stp Logic 1 A141
Stp Logic 2 A142
Stp Logic 3 A143
Stp Logic 4 A144
Stp Logic 5 A145
Stp Logic 6 A146
Stp Logic 7 A147
Stp Logic Time 0 A150
Stp Logic Time 1 A151
Stp Logic Time 2 A152
Stp Logic Time 3 A153
Stp Logic Time 4 A154
Stp Logic Time 5 A155
Stp Logic Time 6 A156
Stp Logic Time 7 A157
EM Brk Off Delay A160
EM Brk On Delay A161
MOP Reset Sel A162
DB Threshold A163
PID Invert Error A164
Step Units 0 E230
Step Units 1 E232
Step Units 2 E234
Step Units 3 E236
Step Units 4 E238
Step Units 5 E240
Step Units 6 E242
Step Units 7 E244
Pos Reg Filter E246
Pos Reg Gain E247
Enh Control Word E248
Cmd Stat Select E249
Fault 6 Code d312
Fault 7 Code d313
Fault 8 Code d314
Fault 9 Code d315
Fault 10 Code d316
Page 17

Display Group Parameters
No. Parameter Min/Max Display/Options
b001 [Output Freq] 0.00/[Maximum Freq] 0.01 Hz
b002 [Commanded Freq] 0.00/ [Maximum Freq] 0.01 Hz
b003 [Output Current] 0.00/(Drive Amps × 2) 0.01 Amps
b004 [Output Voltage] 0/Drive Rated Volts 1 VAC
b005 [DC Bus Voltage] Based on Drive Rating 1 VDC
b006 [Drive Status] 0/1 (1 = Condition True) Bit 3
b007-
[Fault x Code] F2/F122 F1
b009
b010 [Process Display] 0.00/9999 0.01 – 1
b012 [Control Source] 0/112 Digit 4
b013 [Contrl In Status] 0/1 (1 = Input Present) Bit 3
b014 [Dig In Status] 0/1 (1 = Input Present) Bit 3
b015 [Comm Status] 0/1 (1 = Condition True) Bit 3
b016 [Control SW Ver] 1.00/99.99 0.01
b017 [Drive Type] 1001/9999 1
b018 [Elapsed Run Time] 0/9999 Hrs 1 = 10 Hrs
b019 [Testpoint Data] 0/FFFF 1 Hex
b020 [Analog In 0-10V] 0.0/100.0% 0.1%
b021 [Analog In 4-20mA] 0.0/100.0% 0.1%
b022 [Output Power] 0.00/(Drive Power × 2) 0.01 kW
b023 [Output Powr Fctr] 0.0/180.0 deg 0.1 deg
b024 [Drive Temp] 0/120 degC 1 degC
b025 [Counter Status] 0/9999 1
b026 [Timer Status] 0.0/9999 Secs 0.1 Secs
b028 [Stp Logic Status] 0/8 1
b029 [Torque Current] 0.00/(Drive Amps × 2) 0.01 Amps
Decelerating Accelerating Forward Running
Reserved 01-11
Digit 1 = Start Command
1, 2 & 9
DB Trans On Stop Input Dir/REV In Start/FWD In
Digital In 4 Digital In 3 Digital In 2 Digital In 1
Comm Error DSI Option Transmitting Receiving
English-17
Bit 2 Bit 1 Bit 0
Digit 2 & 3 = Speed Command
Bit 2 Bit 1 Bit 0
Bit 2 Bit 1 Bit 0
Bit 2 Bit 1 Bit 0
Smart Start-Up with Program Group Parameters
The PowerFlex 40P is designed so that start up is simple and efficient. The Program Group
contains the most commonly used parameters.
= Stop drive before changing this parameter.
No. Parameter Min/Max Display/Options Default
P031 [Motor NP Volts] 20/Drive Rated Volts 1 VAC Based on Drive Rating
Set to the motor nameplate rated volts.
P032 [Motor NP Hertz] 15/500 Hz 1 Hz 60 Hz
Set to the motor nameplate rated frequency.
P033 [Motor OL Current] 0.0/(Drive Rated Amps×2) 0.1 Amps Based on Drive Rating
Set to the maximum allowable motor current.
P034 [Minimum Freq] 0.00/500.0 Hz 0.01 Hz 0.00 Hz
Sets the lowest frequency the drive will output
continuously.
P035 [Maximum Freq] 0.00/500.0 Hz 0.01 Hz 60.00 Hz
Sets the highest frequency the drive will output.
Page 18

English-18
= Stop drive before changing this parameter.
No. Parameter Min/Max Display/Options Default
P036 [Start Source] 1/6 1 = “3-Wire”
Sets the control scheme used to star t the drive.
P037 [Stop Mode] 0/9 0 = “Ramp, CF”
Active stop mode for all stop sources [e.g. run
forward (I/O Terminal 02), run reverse (I/O
Terminal 03), RS485 port] except as noted.
Important: I/O Terminal 01 is always a coast to
stop input except when P036 [Start Source] is set
for “3-Wire” control. When in th ree wire control, I/O
Terminal 01 is controlled by P037 [Stop Mode].
P038 [Speed Reference] 1/9 1 = “InternalFreq”
Sets the source of the speed reference to the
drive.
Important: When A051 or A052 [Digital Inx Sel] is
set to option 2, 4, 5, 6, 13 or 14 and the digital
input is active, A051, A052, A053 or A054 will
override the speed reference commanded by this
parameter. Refer to Chapter 1 of the PowerFlex
40P User Manual for details.
P039 [Accel Time 1] 0.0/600.0 Secs 0.1 Secs 10.0 Secs
Sets the rate of accel for all speed increases.
P040 [Decel Time 1] 0.0/600.0 Secs 0.1 Secs 10.0 Secs
Sets the rate of decel for all speed decreases.
P041 [Reset To Defalts] 0/1 0 = “Ready/Idle”
Resets all parameter values to factory defaults.
P042 [Voltage Class] 2/3
Sets the voltage class of 600V drives.
P043 [Motor OL Ret] 0/1 1 = “Enabled” 0 = “Disabled”
Enables/disables the Motor Overload Retention function.
2 = “2-Wire”
3 = “2-W Lvl Sens”
4 = “2-W Hi Speed”
5 = “Comm Port”
6 = “Momt FWD/REV”
1 = “Coast, CF”
2 = “DC Brake, CF”
3 = “DCBrkAuto,CF”
4 = “Ramp”
5 = “Coast”
6 = “DC Brake”
7 = “DC BrakeAuto”
8 = “Ramp+EM B,CF”
9 = “Ramp+EM Brk”
(1)
Stop input also clears active fault.
2 = “0-10V Input”
3 = “4-20mA Input”
4 = “Preset Freq”
5 = “Comm Port”
6 = “Stp Logic”
7 = “Anlg In Mult”
8 = “Encoder”
9 = “Positioning”
1 = “Factory Rset”
2 = “Low Voltage” (480V)
3 = “High Voltage” (600V)
(1)
(1)
(1)
(1)
5
0
5
0
3
Advanced Program Group Parameters
= Stop drive before changing this parameter.
Parameter
No.
A125 [Torque Perf Mode] 0/1 0 = “V/Hz”
Enables/disables sensorless vector control
operation.
A126 [Motor NP FLA] 0.1/(Drive Rated Amps x 2) 0.1 Amps Drive Rated Amps
Set to the motor nameplate rated full load amps.
A127 [Autotune] 0/2 0 = “Ready/Idle”
Provides an automatic method for setting A128 [IR
Voltage Drop] and A129 [Flux Current Ref], which
affect sensorless vector performance. Parameter
A126 [Motor NP FLA] must be set to the motor
nameplate full load amps before running the
Autotune procedure.
Min/Max Display/Options Default
1 = “Sensrls Vect”
1 = “Static Tune”
2 = “Rotate Tune”
1
0
Page 19

Enhanced Program Group Parameters
= Stop drive before changing this parameter.
No. Parameter Min/Max Display/Options Default
E216 [Motor Fdbk Type] 0/5 0 = “None”
Selects the encoder type.
E217 [Motor NP Poles] 2/40 1 4
Defines the number of poles in the motor.
E218 [Encoder PPR] 1/20000 1 1024
Specifies the encoder pulses per revolution when
an encoder is used. For additional information refer
to Appendix F of the PowerFlex 40P User Manual.
1 = “Pulse Train”
2 = “Single Chain”
3 = “Single Check”
4 = “Quadrature”
5 = “Quad Check”
0
Program Group Parameters
Refer to the PowerFlex 40P User Manual supplied with the drive for
complete listing of parameters.
Advanced Display Group Parameters
No. Parameter Min/Max Display/Options
d301 [Drive Status 2] 0/1 1
d302 [Fibers Status] 0/1 1
d303 [Slip Hz Meter] 0.0/25.0 Hz 0.1 Hz
d304 [Speed Feedback] 0/64000 RPM 1 RPM
d305 [Speed Feedback F] 0.0/0.9 0.1
d306 [Encoder Speed] 0/64000 1
d307 [Encoder Speed F] 0.0/0.9 0.1
d308 [Units Traveled H] 0/64000 1
d309 [Units Traveled L] 0.00/0.99 0.01
d310 [Fault 4 Code] 0/122 1
d311 [Fault 5 Code] 0/122 1
d312 [Fault 6 Code] 0/122 1
d313 [Fault 7 Code] 0/122 1
d314 [Fault 8 Code] 0/122 1
d315 [Fault 9 Code] 0/122 1
d316 [Fault 10Code] 0/122 4
English-19
Fault Codes
To clear a fault, press the Stop key, cycle power or set A100 [Fault Clear] to 1 or
2.
No. Fault Description
F2 Auxiliary Input
F3 Power Loss Monitor the incoming AC line for low voltage or line power interruption.
F4 UnderVoltage
F5 OverVoltage
(1)
Check remote wiring.
Verify communications programming for intentional fault.
Check input fuses.
(1)
Monitor the incoming AC line for low voltage or line power interruption.
(1)
Monitor the AC line for high line voltage or transient conditions. Bus overvoltage can also be
caused by motor regeneration. Extend the decel time or install dynamic brake option.
Page 20

English-20
No. Fault Description
F6 Motor Stalled
F7 Motor Overload
F8 Heatsink OvrTmp
F12 HW OverCurrent Check programming. Check for excess load, improper DC boost setting, DC brake volts set too
F13 Ground Fault Check the motor and external wiring to the drive output terminals for a grounded condition.
F29 Analog Input Loss
(1)
Increase [Accel Time x] or reduce load so drive output current does not exceed the current set
by parameter A089 [Current Limit].
(1)
An excessive motor load exists. Reduce load so drive output current does not exceed the
current set by parameter P033 [Motor OL Current]. Verify A084 [Boost Select] setting.
(1)
Check for blocked or dirty heat sink fins. Verify that ambient temperature has not exceeded
40°C (104°F) for IP 30/NEMA 1/UL Type 1 installations or 50°C (122°F) for Open type installations.
Check fan.
high or other causes of excess current.
(1)
An analog input is configured to fault on signal loss. A signal loss has occurred.
Check parameters. Check for broken/loose connections at inputs.
F33 Auto Rstrt Tries Correct the cause of the fault and manually clear.
F38 Phase U to Gnd Check the wiring between the drive and motor.
F39 Phase V to Gnd
F40 Phase W to Gnd
F41 Phase UV Short Check the motor and drive output terminal wiring for a shorted condition.
F42 Phase UW Short
Check motor for grounded phase.
Replace drive if fault cannot be cleared.
Replace drive if fault cannot be cleared.
F43 Phase VW Short
F48 Params Defaulted The drive was commanded to write default values to EEPROM.
F63 SW OverCurrent
Clear the fault or cycle power to the drive. Program the drive parameters as needed.
(1)
Check load requirements and A098 [SW Current Trip] setting.
F64 Drive Overload Reduce load or extend Accel Time.
F70 Power Unit Cycle power. Replace drive if fault cannot be cleared.
F71 Net Loss The communication network has faulted.
Cycle power. Check communications cabling.
Check network adapter setting. Check external network status.
F80 SVC Autotune The autotune function was either cancelled by the user of failed. Restart procedure.
F81 Comm Loss If adapter was not intentionally disconnected, check wiring to the port. Replace wiring, por t
F91 Encoder Loss Requires differential encoder. One of the 2 encoder channel signals is missing.
expander, adapters or complete drive as required.
Check connection.
An adapter was intentionally disconnected. Turn off using A105 [Comm Loss Action].
Connecting I/O Terminal 04 to ground may improve noise immunity.
Check Wiring.
If P038 [Speed Reference] = 9 “Positioning” and E216 [Motor Fdbk Type] = 5 “Quad Check”
swap the Encoder channel inputs (see page 13) or swap any two motor leads.
Replace encoder.
F100 Parameter Checksum Restore factory defaults.
F111 Enable Hardware DriveGuard Safe-Off Option (Series B) board is installed and the ENBL enable jumper has not
been removed.
Remove the ENBL enable jumper. Cycle power.
DriveGuard Safe-Off Option (Series B) board has failed.
Remove power to the drive. Replace DriveGuard Safe-Off Option (Series B) board.
Hardware Enable circuitry has failed.
Replace drive.
F122 I/O Board Fail Cycle power. Replace drive if fault cannot be cleared.
(1)
Auto-Reset/Run type fault. Configure with parameters A092 and A093.
Page 21

English-21
c
g
RUN
REV
FAULT
RUN
REV
FAULT
a
d
e
b
5.5 (0.22)
f
20A-DG01
B Frame - 22-JBAB
C Frame - 22-JBAC
B Frame - 22-JBCB
(used with Comm Cover)
C Frame - 22-JBCC
(used with Comm Cover)
Dimension
Option
B Frame
Drive
C Frame
Drive
a Comm Cover 25 (0.98) 25 (0.98)
b EMC Line Filter 50 (1.97) 60 (2.36)
c EMC Line Filter 229 (9.02) 309 (12.17)
d IP30/NEMA 1/UL
Typ e 1
33 (1.30) 60 (2.36)
IP30/NEMA 1/UL
Type 1 for Comm
Cover
64 (2.52) 60 (2.36)
Drive Dimensions
PowerFlex 40P Frames – Ratings are in kW and (HP)
Frame 240V AC – 3-Phase 480V AC – 3-Phase 600V AC – 3-Phase
B 0.4 (0.5)
0.75 (1.0)
1.5 (2.0)
C 5.5 (7.5)
7.5 (10.0)
PowerFlex 40P AC Drive
2.2 (3.0)
3.7 (5.0)
0.4 (0.5)
0.75 (1.0)
1.5 (2.0)
5.5 (7.5)
7.5 (10.0)
2.2 (3.0)
4.0 (5.0)
11.0 (15.0) 5.5 (7.5)
0.75 (1.0)
1.5 (2.0)
2.2 (3.0)
7.5 (10.0)
4.0 (5.0)
11.0 (15.0)
Dimensions are in millimeters and (inches).
Weights are in kilograms and (pounds).
Communication, RFI Filter, IP 30/NEMA 1/UL Type 1 Option Kits
a
b
d
c
79.1 (3.11)
64.1 (2.52)
40.6 (1.60)
25.6 (1.01)
77.5 (3.05)
50.0 (1.97)
22.5 (0.89)
abcdefg
Frame
B100
180
(3.94)
C130
(5.1)
(7.09)
260
(10.2)
∅
(0.87)
∅
(0.87)
148
(5.83)87(3.43)
192
(7.56)
22.2
109.9
(4.33)
74.3
(2.93)
22.2
116
(4.57)
66.0 (2.60)
24.0 (0.94)
92.2 (3.63)
69.2 (2.72)
45.7 (1.80)
22.2 (0.87)
168
(6.61)
246
(9.7)
107.0 (4.21)
108.7 (4.28)
136
(5.35)
180
(7.1)
134.3
(5.29)
105.3
(4.15)
76.3
(3.00)
Ship
Weigh t
87.4
2.2
(3.44)
(4.9)
–4.3
(9.5)
∅
28.5
(1.12)
∅
22.2
(0.87)
152.2
(5.99)
111.2
(4.38)
∅
28.5
(1.12)
∅
22.2
(0.87)
179.8
(7.08)
144.8
(5.70)
109.8
(4.32)
Page 22

English-22
U.S. Allen-Bradley Drives Technical Support
Tel: (1) 262.512.8176, Fax: (1) 262.512.2222, Email: support@drives.ra.rockwell.com, Online: www.ab.com/support/abdrives
Notes:
Publication 22D-QS001D-EN-P – June 2013
Supersedes October 2008 Copyright © 2013 Rockwell Automation, Inc. All rights reserved.
 Loading...
Loading...