

Page 1
Stepper Controller
Module
(Catalog No. 1746-HSTP1)
User Manual
Page 2
Important User Information
Because of the variety of uses for the products described in this
publication, those responsible for the application and use of this
control equipment must satisfy themselves that all necessary steps
have been taken to assure that each application and use meets all
performance and safety requirements, including any applicable laws,
regulations, codes and standards.
The illustrations, charts, sample programs and layout examples shown
in this guide are intended solely for purposes of example. Since there
are many variables and requirements associated with any particular
installation, Allen-Bradley does not assume responsibility or liability
(to include intellectual property liability) for actual use based upon
the examples shown in this publication.
Allen-Bradley publication SGI-1.1, Safety Guidelines for the
Application, Installation and Maintenance of Solid-State Control
(available from your local Allen-Bradley office), describes some
important differences between solid-state equipment and
electromechanical devices that should be taken into consideration
when applying products such as those described in this publication.
Reproduction of the contents of this copyrighted publication, in whole
or part, without written permission of Rockwell Automation, is
prohibited.
Throughout this manual we use notes to make you aware of safety
considerations:
ATTENTION
Identifies information about practices or
circumstances that can lead to personal injury or
death, property damage or economic loss
!
Attention statements help you to:
• identify a hazard
• avoid a hazard
• recognize the consequences
IMPORTANT
Allen-Bradley is a trademark of Rockwell Automation
Identifies information that is critical for successful
application and understanding of the product.
Page 3

European Communities (EC)
Directive Compliance
If this product has the CE mark it is approved for installation within
the European Union and EEA regions. It has been designed and
tested to meet the following directives.
EMC Directive
This product is tested to meet the Council Directive 89/336/EC
Electromagnetic Compatibility (EMC) by applying the following
standards, in whole or in part, documented in a technical
construction file:
• EN 50081-2 EMC — Generic Emission Standard, Part 2 —
Industrial Environment
• EN 50082-2 EMC — Generic Immunity Standard, Part 2 —
Industrial Environment
This product is intended for use in an industrial environment.
Low Voltage Directive
This product is tested to meet Council Directive 73/23/EEC Low
Voltage, by applying the safety requirements of EN 61131-2
Programmable Controllers, Part 2 - Equipment Requirements and
Tests. For specific information required by EN 61131-2, see the
appropriate sections in this publication, as well as the Allen-Bradley
publication Industrial Automation Wiring and Grounding Guidelines
For Noise Immunity, publication 1770-4.1.
This equipment is classified as open equipment and must be
mounted in an enclosure during operation to provide safety
protection.
Page 4

Table of Contents
Table of Contents
Preface
Chapter 1
Using This Manual
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . P-1
Contents of this Manual. . . . . . . . . . . . . . . . . . . . . . . . . . . P-1
Intended Audience . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . P-2
Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . P-2
Rockwell Automation Support . . . . . . . . . . . . . . . . . . . . . . P-2
Local Product Support . . . . . . . . . . . . . . . . . . . . . . . . . P-3
Technical Product Assistance . . . . . . . . . . . . . . . . . . . . P-3
On the Web . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . P-3
Module Overview
Chapter Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
Stepper Controller. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
Operating Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Configuration Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Command Mode Operation . . . . . . . . . . . . . . . . . . . . . . . . 1-3
Diagnostic Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
LED Indicator Diagnostics . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
Input/Output Terminals. . . . . . . . . . . . . . . . . . . . . . . . . . . 1-5
Terminal Block Release Screws . . . . . . . . . . . . . . . . . . . . . 1-5
Chapter 2
i Publication 999-121 - December 1999
Installation and Wiring
Chapter Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
General Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
Starting and Stopping the Module . . . . . . . . . . . . . . . . . . . 2-2
Wiring for a Differential Interface. . . . . . . . . . . . . . . . . . . . 2-2
Wiring to Optocoupler Interface . . . . . . . . . . . . . . . . . . . . 2-3
Wiring to Optocoupler Interface (Continued) . . . . . . . . . . . 2-5
Wiring Information for TTL Interface . . . . . . . . . . . . . . . . . 2-5
Typical Input Circuitry. . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
Typical Encoder Timing Diagram. . . . . . . . . . . . . . . . . . . . 2-7
Encoder Feedback Connections . . . . . . . . . . . . . . . . . . . . . 2-8
Page 5

Table of Contents
ii
Chapter 3
Chapter 4
Start Up and Troubleshooting
Chapter Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
System Start Up. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
Normal Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
Troubleshooting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
Safety Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
Removing the Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
Module Operation
Chapter Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
Module Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
Operating Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
Configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
Operation Using the Pulse and Direction Outputs . . . . . 4-2
Fixed Speed Operation . . . . . . . . . . . . . . . . . . . . . . . . 4-2
Origin (Home) Search Sequence of Operation. . . . . . . . 4-3
Resetting the Current Absolute Position. . . . . . . . . . . . . 4-3
Chapter 5
Configuration and Programming
Chapter Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
Programming Conventions . . . . . . . . . . . . . . . . . . . . . . . . 5-1
Configuration and Status Bits. . . . . . . . . . . . . . . . . . . . . . . 5-1
Program Scan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
SLC Processor Configuration . . . . . . . . . . . . . . . . . . . . . . . 5-1
Processor configuration using APS . . . . . . . . . . . . . . . . 5-2
Processor configuration using HHT (Catalog 1747–PT1). 5-2
Module Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-3
General Information. . . . . . . . . . . . . . . . . . . . . . . . . . . 5-3
Configuration Error . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-3
Configuration mode output image table . . . . . . . . . . . . 5-3
Configuration mode input image table . . . . . . . . . . . . . 5-6
Invalid Configurations . . . . . . . . . . . . . . . . . . . . . . . . . 5-6
Programming Command Mode . . . . . . . . . . . . . . . . . . . . . 5-8
Output Words – SLC Processor to Stepper Controller. . . 5-8
Output Command Word 0 Bit Definition . . . . . . . . . . . . . . . . . . . 5-8
Command Mode Output Words. . . . . . . . . . . . . . . . . . . . . . . . . . . 5-8
Output Command Bits for Word 0 . . . . . . . . . . . . . . . . 5-10
Absolute/relative move commands . . . . . . . . . . . . . . . . 5-11
Homing Routines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-14
Home to Limit Switch. . . . . . . . . . . . . . . . . . . . . . . . . . 5-14
Home to Proximity Limit Switch and Home Limit Switch 5-14
Publication 999-121 - December 1999
Page 6

Table of Contents
Home to Proximity Limit Switch and Marker . . . . . . . . . 5-14
Programming Simple Moves . . . . . . . . . . . . . . . . . . . . . . . 5-16
General Information. . . . . . . . . . . . . . . . . . . . . . . . . . . 5-16
Data File Structures . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-16
Using the N Files for Motion Commands. . . . . . . . . . . . 5-17
Quadrature Encoder Input . . . . . . . . . . . . . . . . . . . . . . 5-17
Use of Direct Inputs. . . . . . . . . . . . . . . . . . . . . . . . . . . 5-17
Programming Blended Moves . . . . . . . . . . . . . . . . . . . . . . 5-18
General Information. . . . . . . . . . . . . . . . . . . . . . . . . . . 5-18
Blend move programming routine . . . . . . . . . . . . . . . . 5-19
Module Status Inputs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-22
Input Word 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-22
Input Word 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-24
Input Words 2 and 3 . . . . . . . . . . . . . . . . . . . . . . . . . . 5-25
Input Words 4 and 5 . . . . . . . . . . . . . . . . . . . . . . . . . . 5-25
Diagnostics Feedback Test. . . . . . . . . . . . . . . . . . . . . . . . . 5-25
Configuration Data for Loop Back Diagnostic Test. . . . . 5-26
Ladder Instructions for Loop Back Diagnostics Test. . . . 5-26
Command Mode Input Words . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-28
iii
Chapter 6
Appendix A
Application Examples
Chapter Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1
Data table used for the program listing for
Sample Module Check Procedure . . . . . . . . . . . . . . . . . 6-1
Program Listing for Sample Module Check Procedure . . 6-1
Entering Negative Position Data . . . . . . . . . . . . . . . . . . 6-4
Converter Example . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-5
Specifications
Industry Standards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1
General Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1
LED Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1
Power Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . A-2
System Limitations . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-2
Discrete Inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-2
Discrete Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-2
Input/Output Terminals . . . . . . . . . . . . . . . . . . . . . . . . A-3
Environmental Operating Conditions . . . . . . . . . . . . . . A-3
Storage Temperature . . . . . . . . . . . . . . . . . . . . . . . . . . A-3
Feedback Circuitry . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-3
Program Storage Requirements . . . . . . . . . . . . . . . . . . . A-3
Processor Compatibility . . . . . . . . . . . . . . . . . . . . . . . . A-3
Publication 999-121 - December 1999
Page 7

Table of Contents
iv
Appendix B
Index
Input/Output Quick Reference
Publication 999-121 - December 1999
Page 8
Using This Manual
Preface
Overview
Contents of this Manual
Read this chapter to familiarize yourself with the rest of the manual. It
provides information concerning the:
• contents of this manual
• intended audience
• conventions used
• hazards of injury or equipment damage
This manual provides specific information relevant to the Stepper
Controller Module, Catalog Number 1746–HSTP1. The following table
identifies the chapters, titles and contents.
Chapter Title Contents
Preface Using This Manual An overview of this manual
1 Module Overview Module Overview, its operation and
hardware features
2 Installation and
Wiring
Interconnection diagrams for various
hardware interfaces for communication
with the Stepper Controller.
3 Start Up and
Troubleshooting
4 Module Operation Describes interface selection, the Module’s
5 Configuration and
Programming/Status
6 Application Examples Illustrated sequencer, configuration and
Appendix A Specifications Temperature, humidity, input output,
Appendix B Input/Output Quick
Reference
1 Publication 999-121 - December 1999
Start up, normal states of LED indicators,
troubleshooting and error handling
information.
use of inputs and outputs, and operating
modes
Provides the steps necessary to configure
the SLC™ Processor and Stepper Controller
command data files.
voltage, timing and cabling information.
A quick reference for the Input/Output
config and command bits and words.
Page 9

P-2
Using This Manual
Intended Audience
Conventions
This manual is designed for the qualified first time user who has a
working knowledge of SLC 500™ products. If necessary, obtain the
proper training before using the Stepper Controller.
The following terms are used throughout this manual:
Input file – refers to the Module's Input Data file. This file is updated
during the SLC Processor input scan
Output file – refers to the Module's Output Data file. This file is
updated during the SLC Processor output scan.
Module – refers to the Stepper Controller, catalog number
1746-HSTP1
Physical outputs – refers to actual outputs on the Stepper Controller
SLC Processor – refers to an SLC 500 family processor
Stepper Translator – refers to the interface between the Stepper
Controller and the stepper motor that converts pulse train outputs into
power signals used to run the motor.
Rockwell Automation
Support
Position Loop – refers to the ability of a controller to accurately
position a mechanism to a precise point based on a dynamic
comparison of command data and feedback from a sensor.
Engineering Units – refer to decimal fractions of units of
measurement; e.g., inches, millimeters and degrees.
CW – refers to rotation or movement in a clockwise direction.
CCW – refers to rotation or movement in a counter-clockwise
direction.
Rockwell Automation offers support services worldwide, with over 75
sales/support offices, 512 authorized distributors, and 260 authorized
systems integrators located throughout the United States. In addition,
Rockwell Automation representatives are located in every major
country in the world.
Publication 999-121 - December 1999
Page 10

Using This Manual
P-3
Local Product Support
Contact your local Rockwell Automation representative for:
• sales and order support
• product technical training
• warranty support
• support service agreements
Technical Product Assistance
If you need to contact Rockwell Automation for technical assistance,
please review the information in this manual. If the problem persists,
call your local Rockwell Automation representative.
The Rockwell Automation Technical Support number is:
On the Web
1-603-443-5419
For information about Allen-Bradley, visit the following World Wide
Web site:
http://www.ab.com/
Publication 999-121 - December 1999
Page 11

P-4
Using This Manual
Publication 999-121 - December 1999
Page 12

Module Overview
Chapter
1
Chapter Objectives
Stepper Controller
The Module overview will permit you to understand the basic
functions of the Module and hardware requirements.
The Module, catalog number 1746–HSTP1, is an SLC 500 family
compatible device. It can be used with any SLC 500 Processor.
The Module is configured through the SLC 500 backplane and
requires no switch settings. Motion can be programmed in either
direction for over ±8,000,000 counts of absolute position.
An optional incremental encoder may be used to verify the position
reached by the axis. The Module does not automatically close a
position loop in engineering units. The feedback hardware can accept
frequencies of up to 250 kHz for use as either loop back diagnostics
or differential incremental encoder feedback devices.
The Module can be programmed for either incremental or absolute
moves, depending on the application.
The Module supports two differential outputs, to suit the type of
Stepper Translator used, which provide the following control
commands:
• CW or non-directional pulse output
• CCW or direction signal output
Discrete inputs are provided for:
• External Interrupt
• Home Limit Switch
• Home Proximity Input
• CW Travel Limit Switch Input
• CCW Travel Limit Switch Input
• Pulse Train Enable/Disable Input
1 Publication 999-121 - December 1999
Page 13
1-2
Module Overview
Differential inputs are provided for:
• Encoder Channel A and A NOT
• Encoder Channel B and B NOT
• Encoder Marker Channel
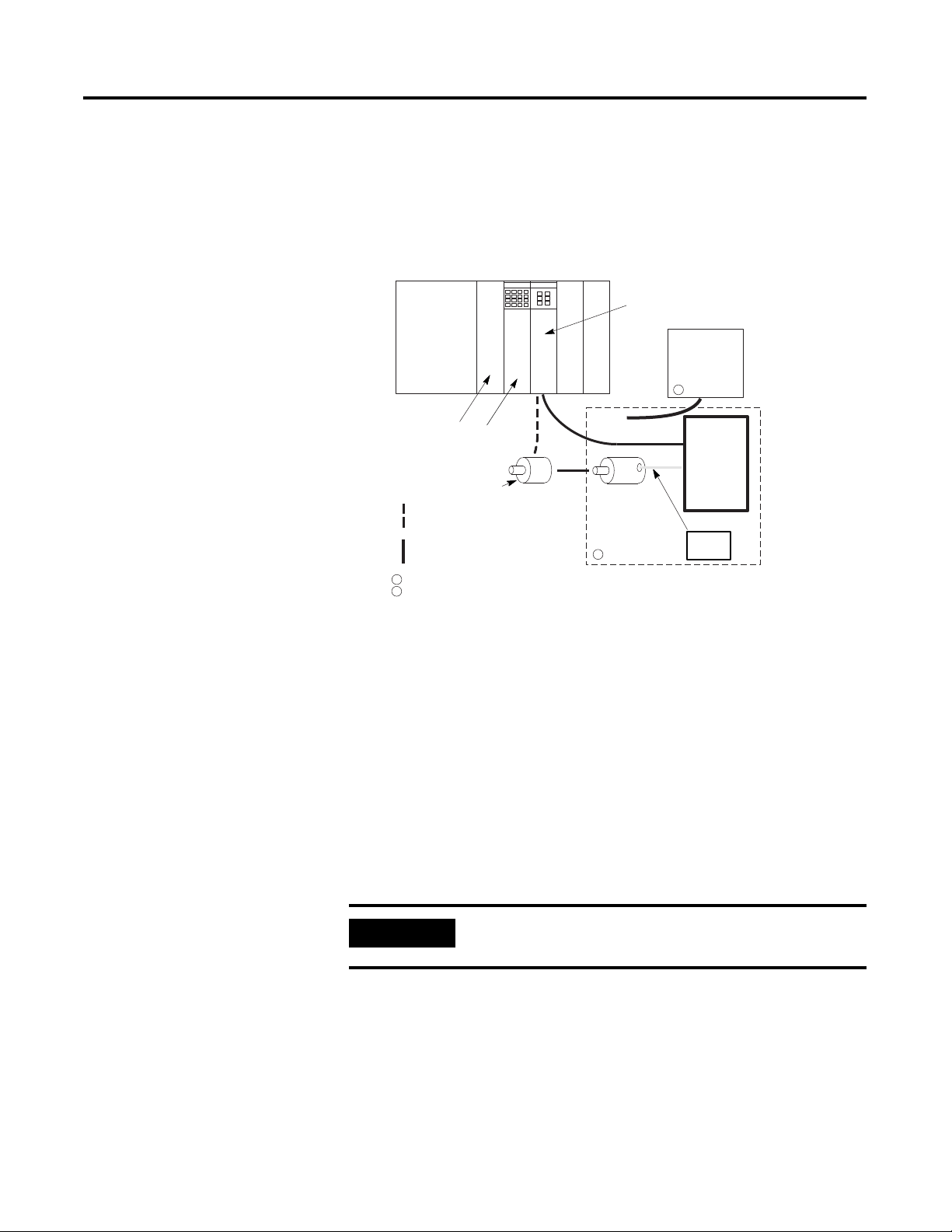
Figure 1.1 Stepper Module Overview
Stepper
Controller
SLC
Power
Supply
SLC
Processor
Optional Feedback Wiring
Control Wiring to Translator
1
The 24V may be obtained from the SLC Power Supply depending on application power requirements.
2
Motor and translator furnished by the customer.
Standard
I/O Module
Optional
Encoder
Stepper
Motor
2
7 to 24V DC
User Power
Supply
1
Stepper
Translator
Power
Wires
Operating Modes
Configuration Mode
The Module operates in three different modes: configuration,
command, and diagnostic. The three operating modes are summarized
below.
The configuration mode is commanded by setting the mode flag (bit
15 in output word 0) to 1. In this mode, the Module is configured
through the SLC Processor to perform specific operations that the user
desires. The configuration mode defines the basic operation of the
Module.
IMPORTANT
The Module does not operate until it has been
configured at least once.
Publication 999-121 - December 1999
Page 14

Module Overview
The Module can be configured to:
• Determine which inputs are used.
• Determine the active level of inputs used.
• Set whether just the encoder marker or a prox limit switch and
encoder marker combination is used for homing.
• Determine if a quadrature encoder will be used.
• Select whether the Module output is a pulse train with direction
command or a CW pulse train and CCW pulse train.
• Select between configuration mode and command mode.
NOTE: Some output combinations are not valid. For example, using
feedback diagnostics and quadrature encoder or using a marker pulse
and a home limit switch. If any invalid combinations are sent, the
configuration error input bit will be set.
1-3
Command Mode Operation
All stepper motor operations are performed in command mode.
This mode is entered by setting the mode flag (bit 15 in output
word 0) to 0.
In command mode, the SLC Processor can issue commands and
activate different operations or moves. The actions you can
command are:
• Absolute Moves
• Relative Moves
• Hold Moves
• Resume Moves
• Immediate Stop Operations
• Homing Operations
• Jogging Operations
• Blend Moves
• Preset Operations
• Reset Errors
Diagnostic Mode
Use the configuration mode to select the diagnostic mode of
operation. Once selected, the diagnostic mode allows you to test your
program and wiring by connecting the loop back wires at the
translator. The purpose of loop back diagnostics is to test the system
wiring for electrical noise. The number of pulses received at the
feedback should equal the commanded number of pulses at the end
of the move. If they are not equal, the system may be experiencing
problems due to electrical noise.
Publication 999-121 - December 1999
Page 15
1-4
Module Overview
LED Indicator Diagnostics
Processor and System O.K.
Commanding a
Counterclockwise Move
An error occurred during
command mode operations
RUN
CCW
ERR
There are five diagnostic LED indicators provided as shown below.
Their purpose is to aid in identifying operational problems.
Figure 1.2 LED Indicators
CW
FLT
RUN
CCW
ERR
STEPPER
CW
FLT
Controller Commanding
Clockwise Motion
No configuration file present
or invalid configuration
Publication 999-121 - December 1999
Page 16
Module Overview
1-5
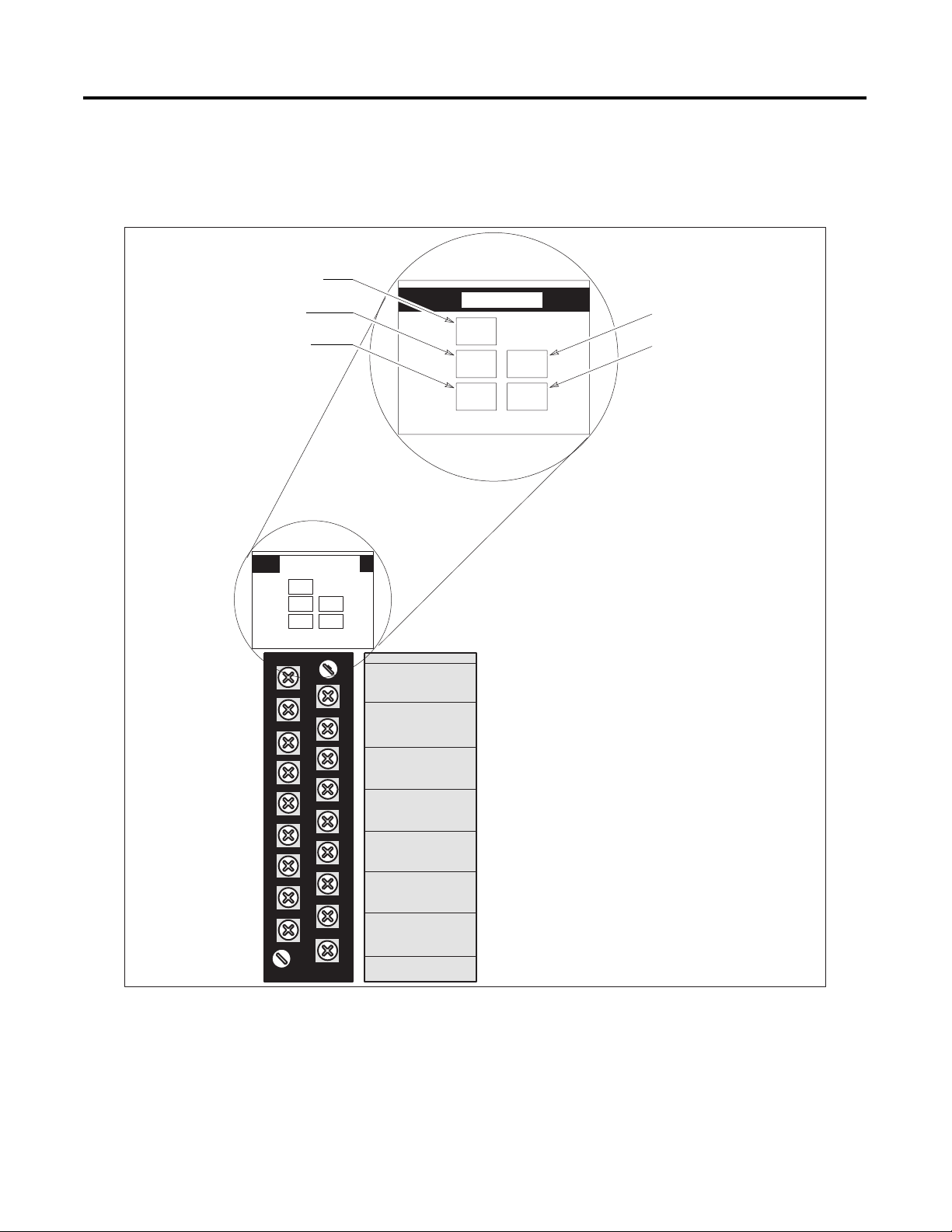
Input/Output Terminals
These terminals supply power and inputs to the Module and outputs
to attached devices. Each can accommodate two #14 gauge wires.
Figure 1.3 Input/Output Terminals
7-24V DC user power (1)
CW + or non directional pulse output (2)
CW - or non directional pulse output (3)
CCW + pulse or direction signal output (4)
CCW - pulse or direction signal output (5)
External interrupt input (6)
Home limit switch input (7)
Home Proximity limit switch input (8)
CW limit switch input (9)
CCW limit switch input (10)
Pulse train enable/disable input (11)
A Hi (Loopback + non directional pulse) (12)
A Lo (Loopback - non directional pulse) (13)
B Hi (Loopback + direction) (14)
B Lo (Loopback - direction (15)
+ Encoder Marker (16)
- Encoder Marker (17)
0 V user power (DC common) (18)
Release Screw
(CCW loosen)
Terminal Block Release
Screws
Release Screw
(CCW loosen)
These captive screws are attached to the terminal block. As the screws
are loosened, the terminal block moves away from the Module. This
feature facilitates replacement of the Module without rewiring.
Publication 999-121 - December 1999
Page 17

1-6
Module Overview
Publication 999-121 - December 1999
Page 18
Installation and Wiring
Chapter
2
Chapter Objectives
General Precautions
This chapter provides information which permits you to properly
unpack, install and wire the interfaces between the Module and the
various Stepper Translators that can be used with the Module. Also
covered are typical input circuitry (direct input and encoder input),
and encoder timing information and encoder feedback connections.
In addition to the precautions listed throughout this manual, the
following statements which are general to the system must be read
and understood.
ATTENTION
!
This drive contains ESD (Electrostatic Discharge)
sensitive parts and assemblies. Static control
precautions are required when installing, testing,
servicing or repairing this assembly. Component
damage may result if ESD static control procedures
are not followed. If you are not familiar with static
control procedures, reference A–B publication 8000–
4.5.2, “Guarding Against Electrostatic Damage” or
any other applicable ESD protection handbook.
An incorrectly applied or installed Module can result
in component damage or a reduction in product life.
Wiring or application errors, such as, undersizing the
motor, incorrect or inadequate AC supply, or
excessive ambient temperatures may result in
malfunction of the system.
Only personnel familiar with the Module and
associated machinery should plan or implement the
installation, start-up and subsequent maintenance of
the system. Failure to comply may result in personal
injury and/or equipment damage.
Installation
1 Publication 999-121 - December 1999
1. Install the Module in the designated slot in your SLC controller
rack. Refer to your SLC controller user manual.
2. Wire the input and output devices as instructed in the following
information.
Page 19
2-2
Installation and Wiring
Wiring
Refer to the following information on typical interface requirements
before beginning this procedure.
ATTENTION
!
To meet the installation requirements of Underwriters Laboratories
Inc. standard UL 508 for industrial control equipment, follow the
guidelines below.
• Use 60/75° C copper wire when wiring the 1746–HSTP1 system.
• Tighten the terminals on the 1746-HSTP1 to 5 lb/in.
• Use Class 1 or Class 2 wiring for the terminals on the 1746–
HSTP1 system.
The following information is merely a guide for
proper installation. The Allen-Bradley Company
cannot assume responsibility for the compliance or
the noncompliance to any code, national, local or
otherwise for the proper installation of this drive or
associated equipment. A hazard of personal injury
and/or equipment damage exists if codes are
ignored during installation.
Starting and Stopping the
Module
Wiring for a Differential
Interface
For more information, refer to standard UL 508 or the National Electric
Code.
ATTENTION
The Module Enable/Disable control circuitry includes
solid-state components. If hazards due to accidental
contact with moving machinery or unintentional flow
of liquid, gas or solids exist, an additional hardwired
stop circuit is required.
!
Several manufacturers of Stepper Translators provide differential
inputs. If your Stepper Translator can accept differential line driver
outputs, follow the interconnection diagram below to connect the
Stepper Controller to the translator.
Publication 999-121 - December 1999
Page 20
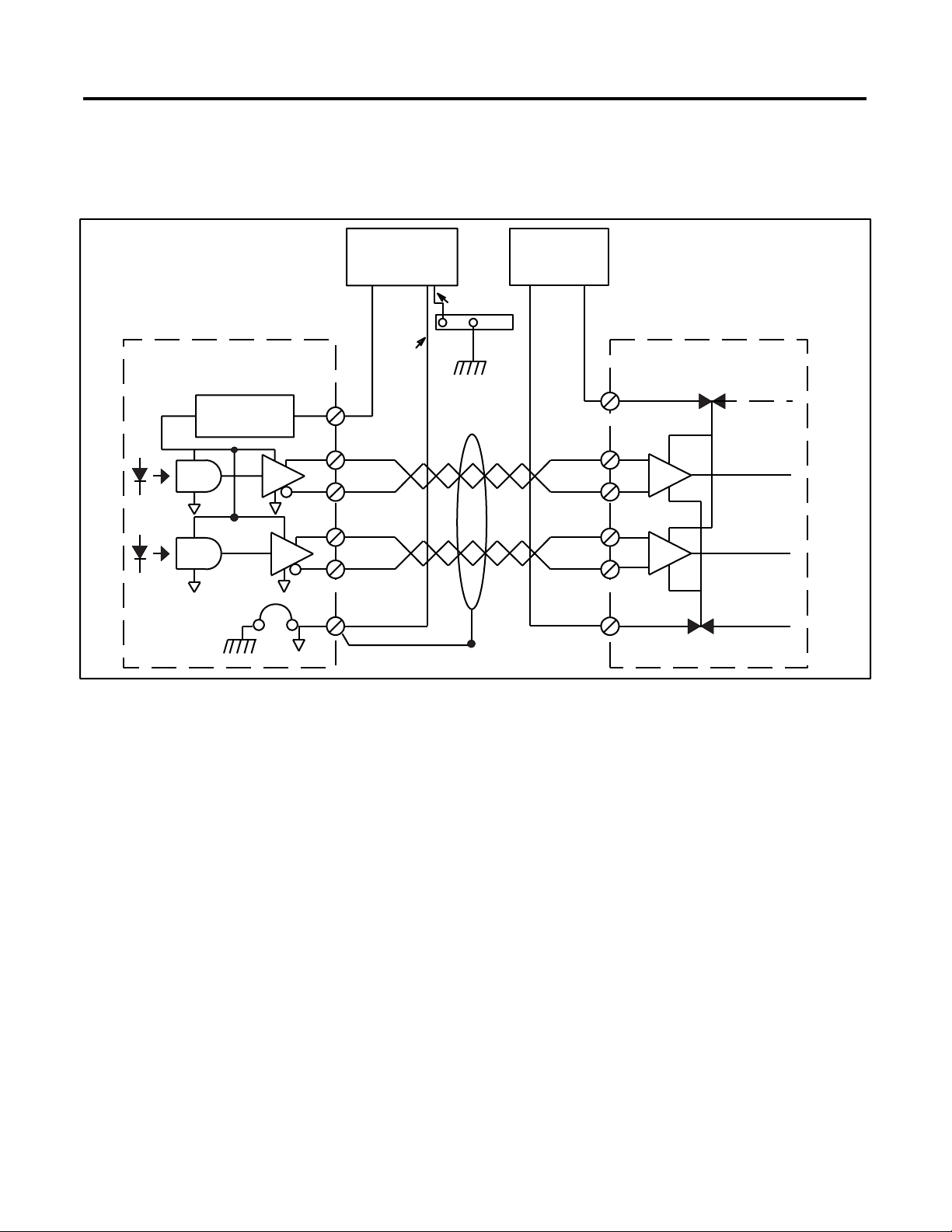
Figure 2.1 Differential Input
Installation and Wiring
2-3
Typical Input Connection
(Refer to page 6-6)
Stepper Controller
Voltage
Regulator
7-24V DC
(+) (-)
16 AWG
1
2
3
4
5
18
16 AWG
Electrical Cabinet
Ground Bus
User
Power Supply
(-) (+)
Driver
External Internal
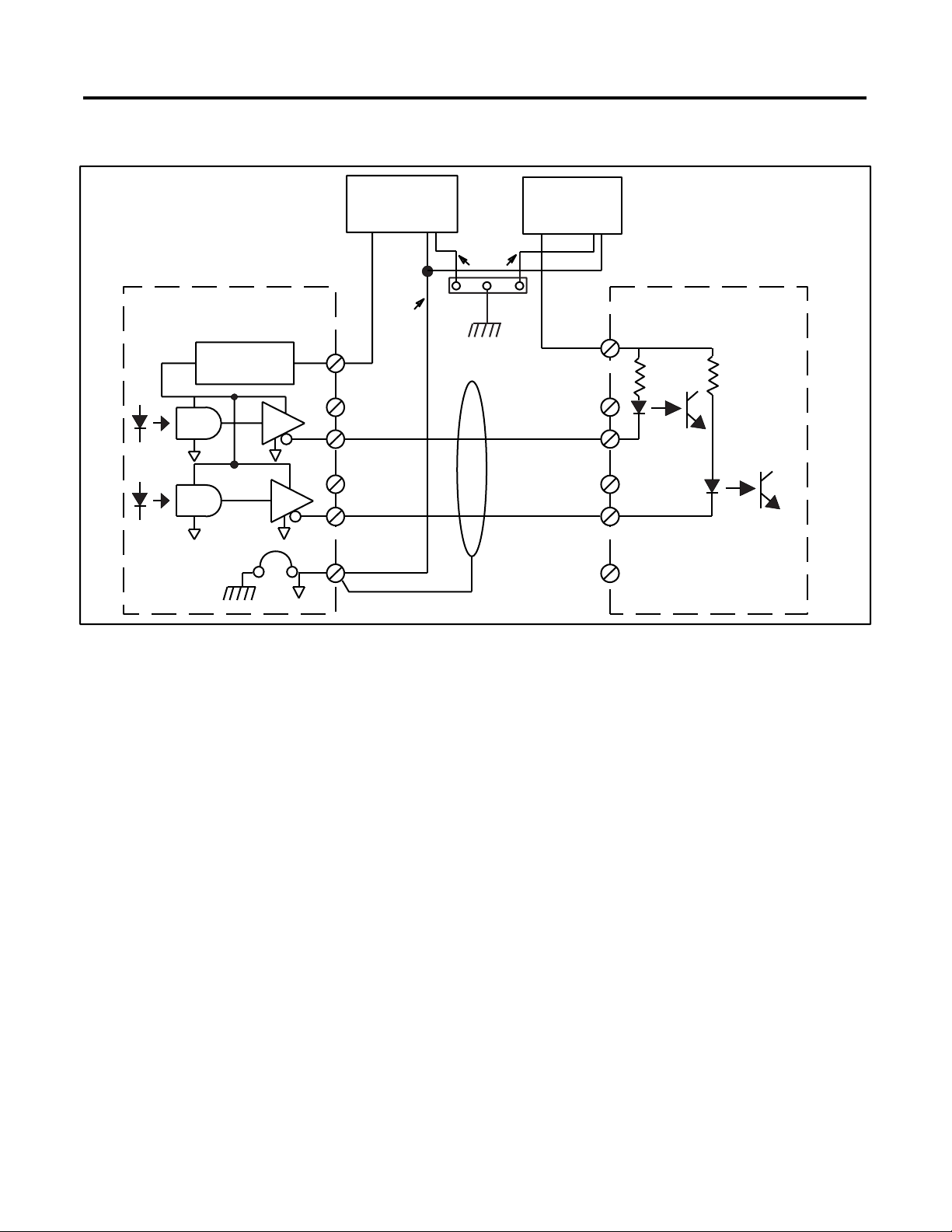
Wiring to Optocoupler
Interface
The following diagrams show the circuitry used to interface the
Module to a Stepper Translator through two different optocoupler
devices. The first diagram shows an optocoupler designed for a
common power supply connection. The second diagram shows an
individually isolated optocoupler. It is your responsibility to determine
which type is used in your specific application, and to ensure that
connections are properly made.
Publication 999-121 - December 1999
Page 21
2-4
Installation and Wiring
Figure 2.2 Optocoupler Input Common Supply
Typical Input Connection
(Refer to page 6-6)
Stepper Controller
Voltage
Regulator
7-24V DC
(+) (-)
16 AWG
1
2
3
4
5
18
16 AWG
Electrical Cabinet
Ground Bus
5V DC
(+) (-)
Driver
Publication 999-121 - December 1999
Page 22
Installation and Wiring
2-5
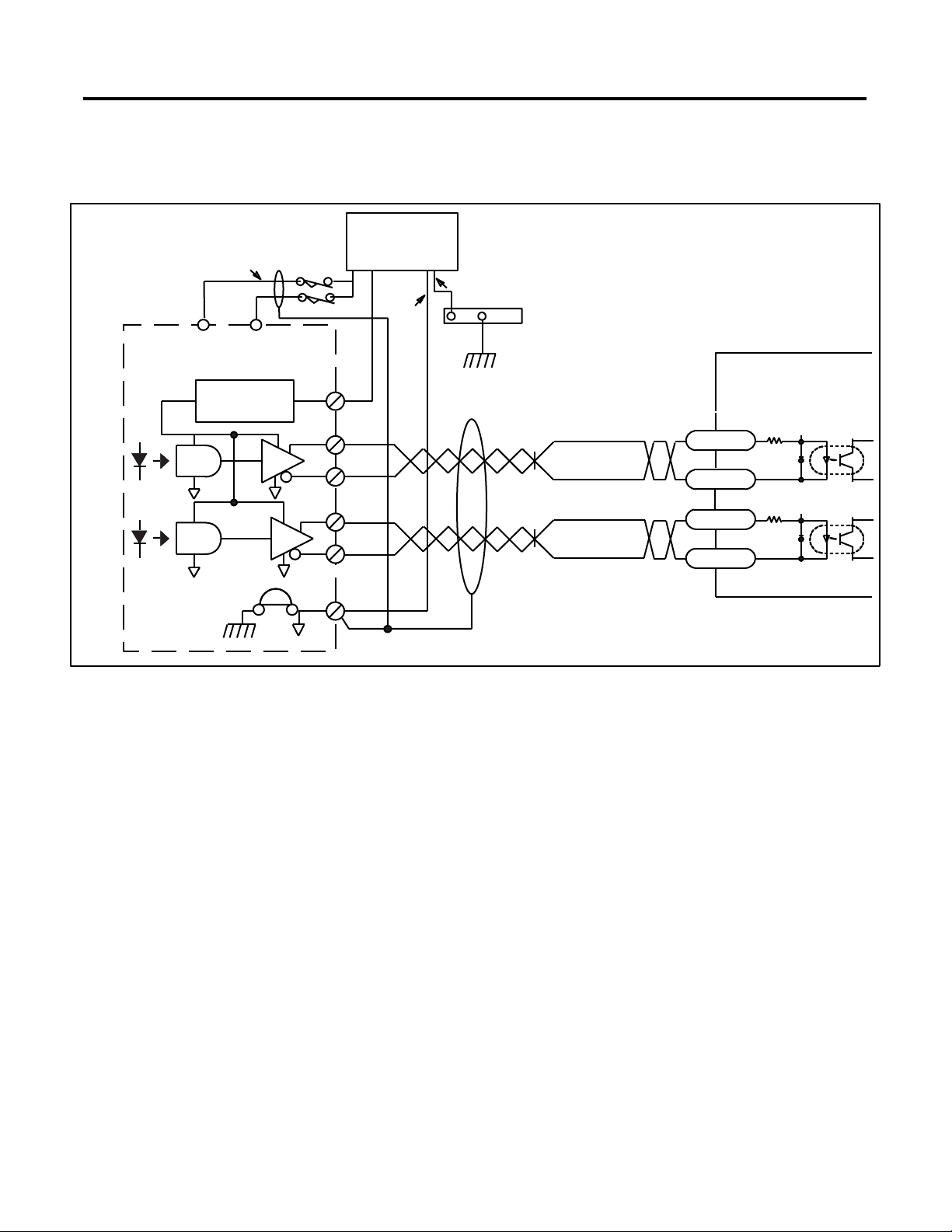
Wiring to Optocoupler
Interface
(Continued)
Typical Input
Connection
CCW Limit
Stepper Controller
10 9
Voltage
Regulator
CW Limit
Figure 2.3 Individually Isolated Optocoupler
7-24V DC
(+) (-)
16 AWG
16 AWG
1
2
3
4
5
Electrical Cabinet
Ground Bus
Pulse Input
Direction Input
+PLS
-PLS
+CW/CCW
-CW/CCW
Typical Driver
220 W
-20mA Max.
220 W
-20mA Max.
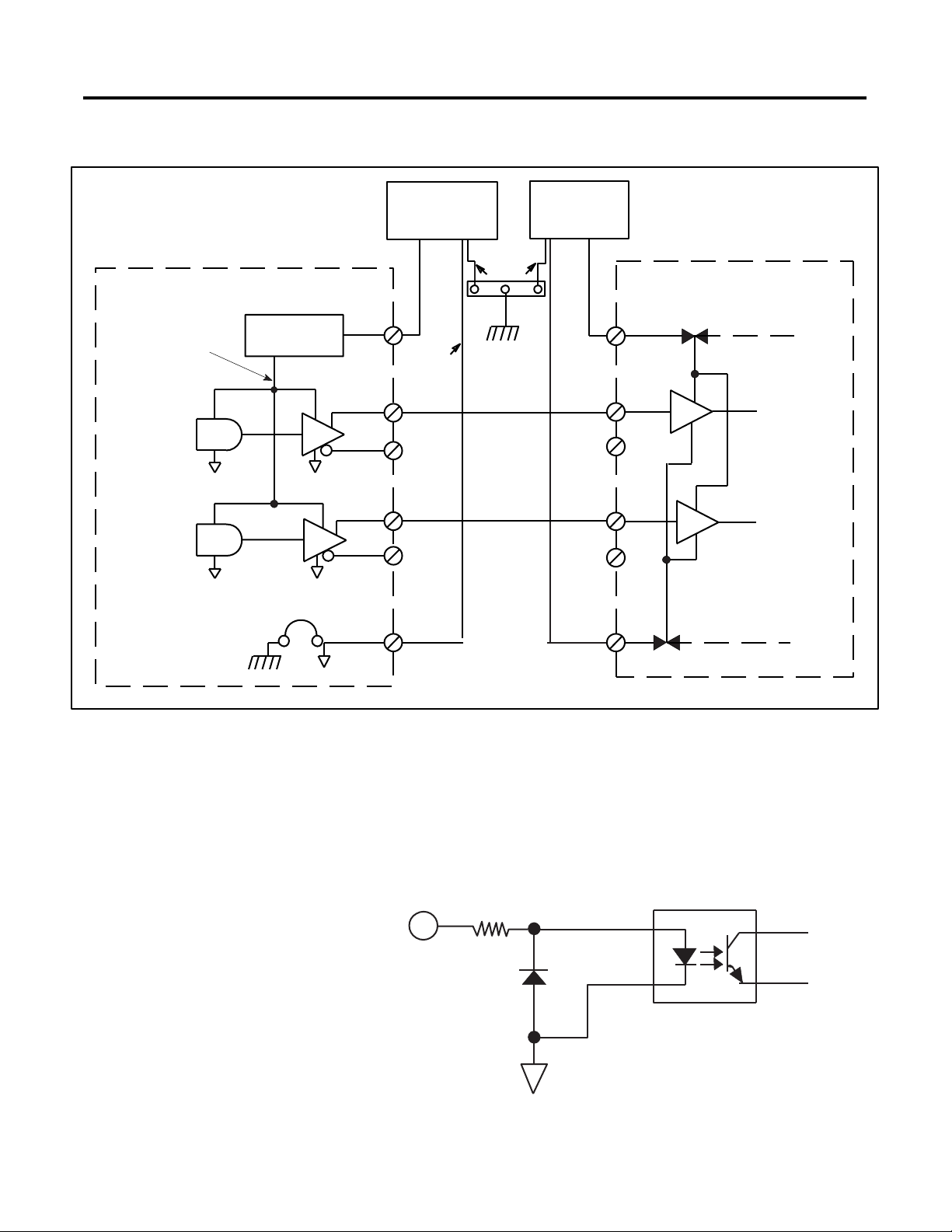
Wiring Information for TTL
Interface
18
The following wiring diagram shows the connections between the
Module and a Stepper Translator that requires a TTL Interface. The
5-volt supply to the TTL interface can be either internal to the
translator itself or a separate power supply selected by the user. This
design is probably the most sensitive to noise due to the single ended,
high-speed nature of the TTL device. For this reason, it should be
used only where the Stepper Translator is close to the Module, that is,
no more than five cable feet, in an enclosure that is well shielded
from EMI noise when the enclosure doors are closed.
Publication 999-121 - December 1999
Page 23
2-6
Installation and Wiring
Figure 2.4 TTL Interface
Typical Input Connection
(Refer to page 6-6)
Stepper Controller
5V DC
Voltage
Regulator
7-24V DC
(+) (-)
1
16 AWG
2
3
4
5
18
Electrical Cabinet
16 AWG
Ground Bus
5V
(-) (+)
Driver
External Internal
Typical Input Circuitry
Publication 999-121 - December 1999
Two basic circuits are used for inputs to the Module. One type is the
direct input circuit for home limit switches, overtravel limits, and
interrupt devices. The second type is for encoder inputs. Both circuits
are shown below.
Figure 2.5 Direct input equivalent circuit
2.2K
Page 24
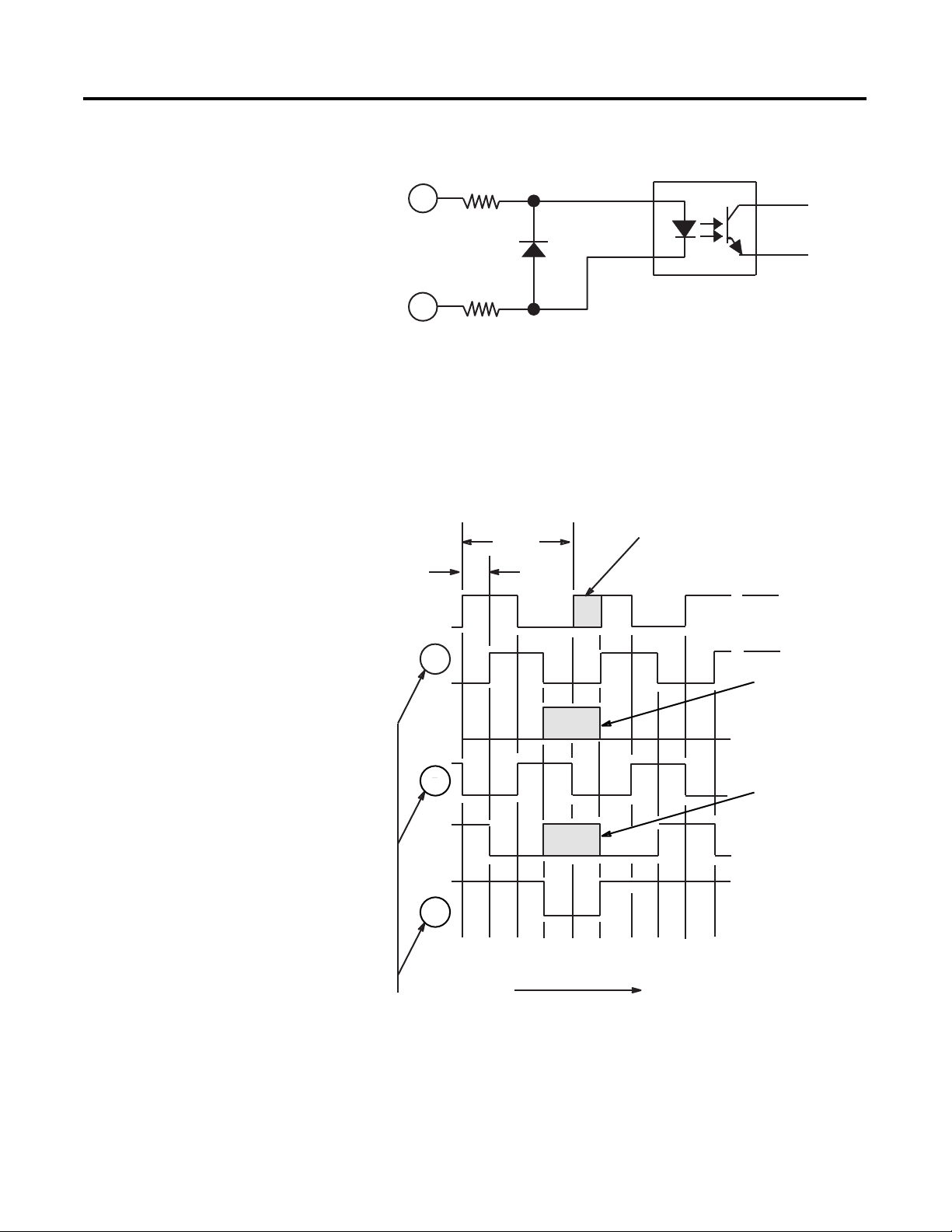
Figure 2.6 Encoder input equivalent circuit
HI
210
Installation and Wiring
2-7
Typical Encoder Timing
Diagram
LO
210
A typical encoder timing diagram is shown below. For actual
connections, consult your encoder manufacturer's timing diagram. For
all encoder types, if the direction (phasing) of the feedback is
backwards, correct this condition by reversing the channel A and
channel B connections.
1 Cycle
90’
Channel A
B
Z
STEP 3
Channel A is high at least part
of marker interval. Connect to
CH A. HI" of termination point
STEP 1
High marker interval.
Connect to + encoder
marker.
Hi
Lo
Optional
A
B
Z
CCW rotation viewing shaft
Wire CH B, CH A, and CH Z to CH B LO, CH A LO, and CH Z LO,
respectively on the terminal block.
STEP 2
B is high for at least
part of marker interval.
Connect to CH B. HI"
Publication 999-121 - December 1999
Page 25
2-8
Installation and Wiring
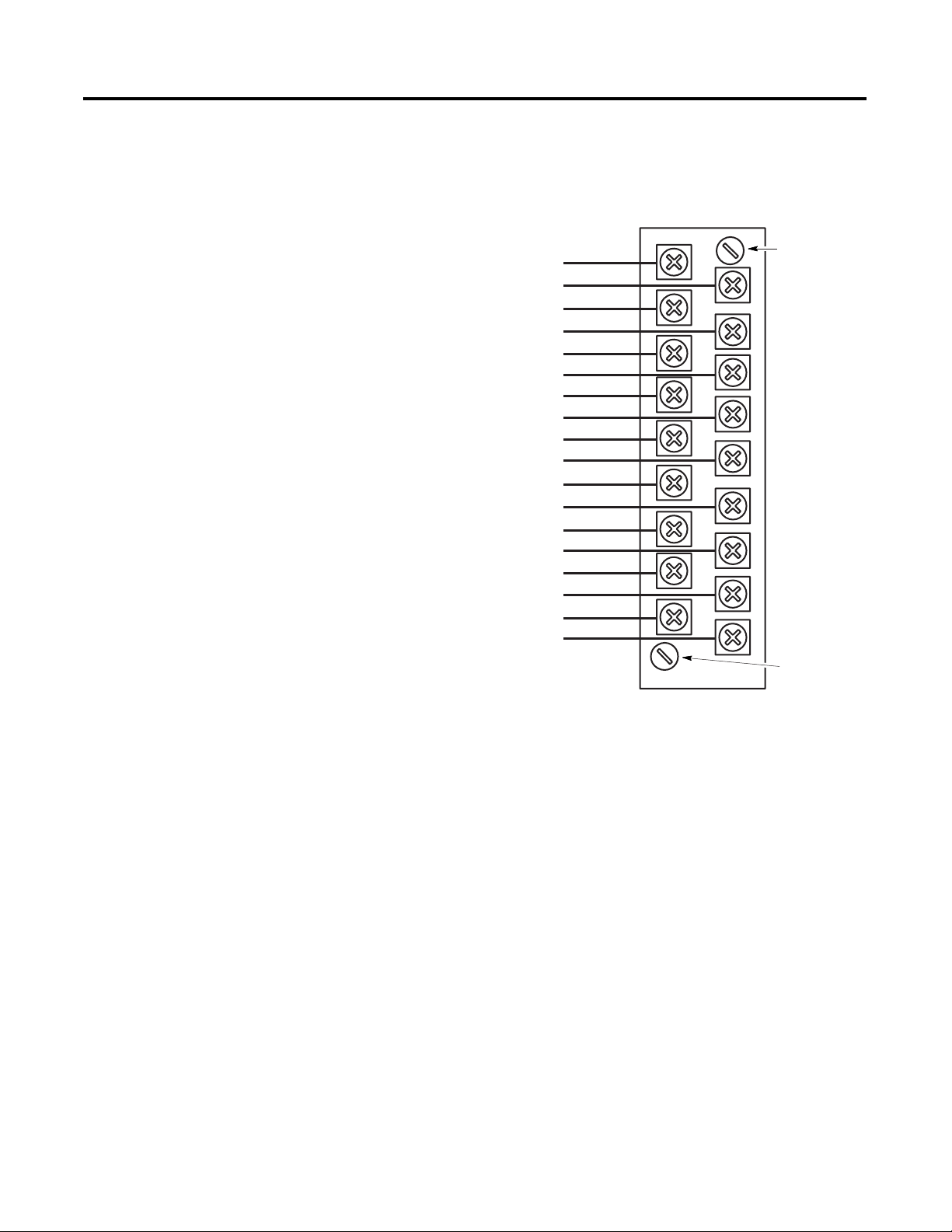
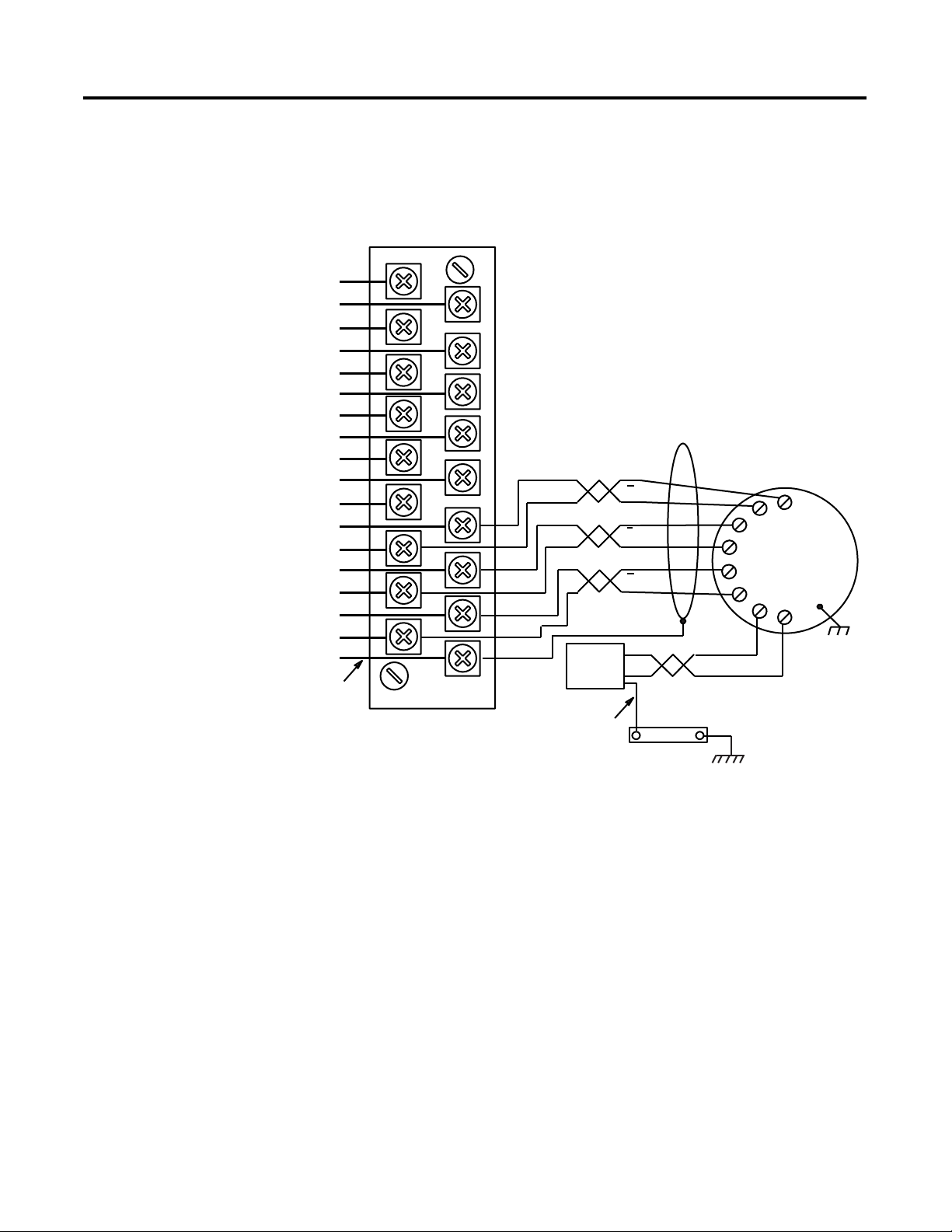
Encoder Feedback
Connections
7-24V DC user power (1)
CW + or non directional pulse output (2)
CW - or non directional pulse output (3)
CW + pulse or direction signal output (4)
CCW - pulse or direction signal output (5)
External interrupt input (6)
Home limit switch input (7)
Home Proximity limit switch input (8)
CW limit switch input (9)
CCW limit switch input (10)
Pulse train enable/disable input (11)
A Hi (Loopback + non directional pulse) (12)
A Lo (Loopback - non directional pulse) (13)
B Hi (Loopback + direction) (14)
B Lo (Loopback - direction (15)
+ Encoder Marker (16)
- Encoder Marker (17)
0 V user power (DC common) (18)
The following two diagrams illustrate encoder connections to the
Module inputs for both 5-volt and 15-volt encoder power supplies.
The -notes" included with each diagram provide specifics on wiring.
Figure 2.7 5-volt encoder feedback connections
A
1
A
B
1
B
I
C
J
16 AWG
1
DC
SOURCE
B
Z
Z
+5V
Return
A
H
A-B 845H
Optical
Encoder
D
F
Case Ground
3
G
Notes:
16 AWG
Electrical Cabinet
Ground Bus
1. Use 3-pair, #22 gauge individually twisted and shielded pair,
Belden 9504 or equivalent.
2. Use 1-pair, #18 gauge twisted and shielded cable.
3. Encoders must have +5V compatible differential line drive
outputs on channels A, B, and Z. (DS8830, or equivalent.) (A-B
845H)
4. +5V from encoder power source – connect encoder return to 0V
user power (DC common) at the power supply sources.
Publication 999-121 - December 1999
Page 26

7-24V DC user power (1)
CW + or non directional pulse output (2)
CW - or non directional pulse output (3)
CW + pulse or direction signal output (4)
CCW - pulse or direction signal output (5)
External interrupt input (6)
Home limit switch input (7)
Home Proximity limit switch input (8)
CW limit switch input (9)
CCW limit switch input (10)
Pulse train enable/disable input (11)
A Hi (Loopback + non directional pulse) (12)
A Lo (Loopback - non directional pulse) (13)
B Hi (Loopback + direction) (14)
B Lo (Loopback - direction (15)
+ Encoder Marker (16)
- Encoder Marker (17)
0 V user power (DC common) (18)
Figure 2.8 15-volt encoder feedback connections
16 AWG
1
1
1
DC
SOURCE
16 AWG
A
A
B
B
Z
Z
+15 VDC
Return
Installation and Wiring
A
H
B
A-B 845H
I
Optical
C
Encoder
J
D
G
F
Case Ground
2-9
3
Notes:
Electrical Cabinet
Ground Bus
1. Use 3-pair, #22 gauge individually twisted and shielded pair,
Belden 9504 or equivalent.
2. Use 1-pair, #18 gauge twisted and shielded cable.
3. Encoders must have +5V compatible differential line drive
outputs on channels A, B, and Z. (DS8830, or equivalent.) (A-B
845H)
4. +15V from encoder power source – connect encoder return to
0V user power (DC common) at the power supply sources.
Publication 999-121 - December 1999
Page 27

2-10
Installation and Wiring
Publication 999-121 - December 1999
Page 28

Start Up and Troubleshooting
Chapter
3
Chapter Objectives
System Start Up
Normal Operation
This chapter contains information that will help you perform the
following start up, troubleshooting, and error handling procedures.
The following instructions apply to initial start up of a Module.
1. Apply power to the SLC system and to the attached input and
output devices.
2. Configure the SLC Processor and the Module as instructed in
Chapter 4 of this manual.
3. Upon successful completion of the configuration steps, the SLC
Processor will switch the Module to the command mode of
operation.
There are no provisions for local control of the Module. Module status
is monitored by the five LED indicators located on the front face of the
Module. Refer to Chapter 2 of this manual for further information on
these LED indicators.
Troubleshooting
1 Publication 999-121 - December 1999
The ERR (error) and FLT (fault) LED indicators on the Module face
serve as diagnostic tools for use in general troubleshooting.
If an operation error occurs during command mode operation, the
ERR LED will light.
If there is no configuration file resident in the Module, or if the
resident configuration file is invalid in any way, the FLT LED will light.
Page 29

3-2
Start Up and Troubleshooting
More detailed troubleshooting information is provided in the
following list:
Problem Resolution
No green RUN LED Either a major Module malfunction or lack of power from
the backplane is indicated. Check for power from the
backplane first; if power is present, the Module must be
replaced.
Red FLT LED is lit Module is improperly configured. Refer to the topic,
“Configuration Mode” in Chapter 4 of this manual for
additional information.
Red ERR LED is lit This means that invalid data has been copied into one of
the command mode output words (position, velocity,
acceleration and/or deceleration). The invalid data must
first be corrected in the appropriate “N” file of the SLC
Processor, and the error then reset. The error is reset by
resetting bit 15 of the configuration mode output word 0
to a logic “10”.
Module completes one
move, and stops
The Module is not “seeing” the 0 to 1 transition required
for each new move (either absolute or relative). To avoid
this condition, it is recommended, when programming,
that you unlatch bits 0 and/or 1 each time a move is in
progress. Note that this will not cause a problem when
toggling between absolute and relative moves.
Module Ready bit goes
false during operation
This could be the result of a poorly seated Module.
Check that the Module is properly inserted in its slot. If
the Module appears to be properly seated, request help
from Allen-Bradley Technical Support. Be sure to provide
a copy of the program involved, and as many other
details as you can about the circumstances that trigger
the fault to assist in the solution of the problem.
Limit switch inputs Limit switch inputs are detected by and their states are
Encoder is not reading
reported by the Module software. If they are not reading
properly:
1) check input signal levels
2) check state setting in configuration
3) check wiring.
Limit switch data can be read by accessing configuration
mode input word 1. Incorrect limit switch states can be
altered by setting the respective bits in configuration mode
output word 1 (refer to the “Configuration Mode” topic in
Chapter 4 of this manual).
This condition can be due to any of the following errors:
improper voltage level is being provided to the encoder by the
encoder power supply; improper signal level from the
encoder, encoder miswired; or, the Module has not been
configured to accept encoder input (IMPORTANT:
operates differently when loop back diagnostics are active;
this mode uses a pulse train and direction bit versus
quadrature encoder pulses).
supply voltage level or reconfigure the Module as applicable.
Correct the encoder power
The Module
Publication 999-121 - December 1999
Page 30

Safety Precautions
Start Up and Troubleshooting
3-3
Removing the Module
ATTENTION
!
Removal of the Module is facilitated by captive screws on the
Terminal Block (refer to Chapter 2).
Severe injury or death can result from electrical
shock, burn, or unintended actuation of controlled
equipment. Hazardous voltages may exist in the
control cabinet even with the circuit breaker in the
off position. Recommended practice is to disconnect
and lock out control equipment from power sources,
and discharge stored energy in capacitors, if present.
If it is necessary to work in the vicinity of energized
equipment, the safety related work practices of NFPA
70E, Electrical Safety Requirements for Employee
Workplaces, must be followed.
DO NOT work alone on energized equipment.
Publication 999-121 - December 1999
Page 31

3-4
Start Up and Troubleshooting
Publication 999-121 - December 1999
Page 32

Module Operation
Chapter
4
Chapter Objectives
Module Overview
The information in this chapter will give you a basic understanding of
frequency outputs and pulse train configuration which must be
considered in the application of the Module.
The Module is an SLC family compatible Module. It is designed for use
with an SLC 500™, SLC 5/01™, SLC 5/02™, SLC 5/03™, SLC 5/04™,or
SLC 5/05™ Processor. The motion profile execution is independent of
the scan time of the SLC Processor once it is initiated. Blended motion
allows for complicated move profiles consisting of two to 16
segments. The blended move profiles are stored in the Module's
internal memory as a series of absolute moves. Since the sequence of
moves is stored in the internal memory of the Module, it can be
executed more than once. Other move or homing operations may be
performed between blended move profiles.
The Module is capable of controlling absolute position over a range of
±8,388,607 pulses with a programmable velocity of 1 to 250,000 pulses
per second and acceleration/deceleration rates between 1 and 2,000
pulses per millisecond per second. The Module is able to perform an
origin search (also called homing) and to automatically reset the
absolute position to zero upon detection of an encoder marker when
an origin search function is requested by the SLC Processor.
Operating Modes
1 Publication 999-121 - December 1999
The three operating modes of the Stepper Controller are:
configuration mode, command mode, and diagnostic mode.
Configuration
The Configuration mode permits the selection of the proper setup
configuration to match the Stepper Translator without setting any
switches and without special software. Until the configuration mode
has been properly set, the Stepper Controller will not operate.
Enabling loopback diagnostics is done using the configuration mode.
In the diagnostic mode, a check is made for noise in the
interconnecting wiring, as well as a check of the program itself.
Page 33

4-2
Module Operation
Command
The Command mode directs all stepper motor operations, through the
Stepper Translator. There are translators which require a pulse train
and direction to operate. Other translators require a CW (positive
direction) pulse train and a CCW (negative direction) pulse train. The
CW and CCW designations refer to directions of stepper motor
rotation. The Stepper Controller can be configured for either type of
translator.
When operating in either the Configuration or the Command mode,
Module status is reported to the SLC Controller.
Operation Using the Pulse and Direction Outputs
If the Stepper Translator requires pulse and direction outputs,
configuration output word 0, bit 10 has to be set to a logic “1”, since
the default state of the Stepper Controller is set up for CW and CCW
pulses (logic “0”, on bit 10). Assuming the Module is inserted in slot 0,
the bit address is 0:0.0/10.
The pulse train and direction signal are illustrated just below the
unconditional rung for clarity. The programmed speed value controls
the frequency of the pulse train and the sign of the destination value
controls the direction output of the Stepper Controller. An alternate
configuration method is to ensure bit 10 of word 0 is true when
moving or copying a data file to word 0 of the output address.
Figure 4.1 Pulse and Direction Outputs
Pulse
Direction
CW/Plus Direction CCW/Minus Direction
Fixed Speed Operation
Operation at fixed speed will cause the pulse and direction to
accelerate at the programmed acceleration rate and reach the final
Publication 999-121 - December 1999
Page 34

Module Operation
programmed velocity data. Use the Jog+ or Jog– to initiate and stop
the motion.
4-3
IMPORTANT
Turning the appropriate bit on will cause the axis to
move. Turning it off causes the axis to decelerate and
stop.
Origin (Home) Search Sequence of Operation
Information on this subject is contained in Chapter 4 of this manual,
within the topic, “Find Home +/(CW), Find Home –/(CCW)”. Note that
the way in which a search is carried out if a home proximity limit
switch is present is different from the sequence when a home
proximity limit switch is not present. The differences are detailed in
Chapter 4.
Resetting the Current Absolute Position
In the event that an “Invalid Position” (input word 0 bit 10 is false),
occurs while in command mode, and no position error actually exists,
a command to “preset position” assigns a predetermined position
value as the absolute position. This establishes the current absolute
position of the axis, and allows subsequent absolute moves to take
place. A typical ladder diagram showing the command to “preset
position” is provided in rung 2:3 of the “Program Listing for Sample
Move” in Chapter 5 of this manual.
Publication 999-121 - December 1999
Page 35

4-4
Module Operation
Publication 999-121 - December 1999
Page 36

Configuration and Programming
Chapter
5
Chapter Objectives
Programming Conventions
Configuration and Status
Bits
This chapter provides information to help you configure both the SLC
Processor and the Module. This chapter also contains instructions for
correctly programming the Module for the command mode of
operation.
Since the SLC Processor does not support numbers as large as
8,000,000, the number must be entered as two distinct integer values
that can be programmed within the capabilities of the SLC Processor.
The value is equated to two 16 bit integer values that provide a coarse
and fine resolution. The least significant word allows for a range of 0
to 999 counts. The most significant word (MSW) provides thousands
of counts. For example, to output 8,000,000 counts, set the most
significant word to 8,000 and the least significant word (LSW) to 0.
Configuration, status and command information is transferred
between the SLC Processor and the Stepper Controller with each scan
of the SLC ladder. The configuration and status bits are boolean values
that can be assigned or read easily by the SLC ladder program. Word 0
and word 1 of the address assigned to the Stepper Controller are
allocated to status and command words. Status bits are defined in
Module Status, later in this chapter. Detailed use of the configuration
bits is described in Configuration Mode, later in this chapter.
Program Scan
SLC Processor
Configuration
1 Publication 999-121 - December 1999
The Module provides new information to the SLC backplane every
250 microseconds.
The SLC Processor must be configured to accept the Stepper
Controller as an I/O device. This can be done with either the Hand
Held Terminal (HHT) or APS software running on a personal
computer. Although the configuration steps are similar using either
method, they are not identical. The two methods are described
separately, below.
Page 37

5-2
Configuration and Programming
Processor configuration using APS
1. Locate an open slot in your chassis. The Module can be used
with any SLC Processor.
2. Assign your SLC Processor, if not done previously:
a. Using APS, press F3 (Offline PRG/DOC), F1 (PROCSSR
FUNCTNS) and F1 (CHANGE PROCSSR) again to assign your
processor and Module.
b. Press F2 to select a processor or F5 to assign a Module.
3. Assign the Module to an open slot:
a. Using APS, highlight an open slot.
b. Press F5 (MODIFY SLOT). Highlight last entry entitled
OTHER. Press ENTER.
4. Enter Module ID Code 3512 (the ID of the Stepper Controller).
5. Eight input and eight output words are automatically created by
the ID code.
Use the data monitor function to enter parameters into the bit (#B) or
Integer (#N) file. Use F1 to change between binary and decimal.
Processor configuration using HHT (Catalog 1747–PT1)
1. Locate an open slot in your chassis. The Module can be used
with any SLC Processor.
2. Assign your SLC Processor, if not done previously.
3. Assign the Module to an open slot:
a. Using an HHT, press F3 (EDT_I/O).
b. Select an open slot with the cursor and press: F2 (MOD_SLT),
F3 (OTHER).
4. Enter Module ID code 3512 (the ID of the Stepper Controller).
Publication 999-121 - December 1999
5. Eight input and eight output words are automatically created by
the ID code.
Page 38

Configuration and Programming
Use the EDT–DAT function to enter parameters into your bit or integer
files.
5-3
Module Configuration
IMPORTANT
The HHT has a default radix of binary for the bit file
(#B) and integer for the integer file (#N). Radices
cannot be changed.
General Information
The Module must be properly configured before any operations may
begin. The Module enters the configuration mode on power up, or
upon setting the configuration output word 0 mode bit (15) to 1.
When configuration mode is set, the Module stops command mode
operations (if applicable), sets the configuration mode flag in the
configuration mode input table (bit 15), and waits for the
configuration file to be transferred over the backplane from the SLC
Processor.
Configuration Error
If there is no configuration file present, or if it is invalid for any
reason, the configuration error input bit (13) in configuration mode
input word 0 is set. If the new configuration file is acceptable, it is
mirrored in the input image table and the error input bit (13) is set to
false (0).
IMPORTANT
The Module is ready to operate when the “Module
OK” bit (14) in configuration input word 0 is 1.
Configuration mode output image table
In the Configuration Mode, the proper setup configuration is selected
to match the Module to the Stepper Translator. Module parameters are
defined by the configuration file which is resident in the SLC
Processor's memory.
Configuration mode is entered by setting bit 15 of output word 0. At
the same time that bit 15 is set, the required configuration data must
be transferred to the Module. No operating commands can be acted
Publication 999-121 - December 1999
Page 39

5-4
Configuration and Programming
upon by the Module until a valid configuration is received. The
configuration file has the following format.
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
OUTPUT
WORD 0
OUTPUT
WORD 1
OUTPUT
WORD 2
OUTPUT
WORD 3
Output word 0: defines the user's configuration; that is, what types of
inputs are present.
IMPORTANT
To guard against a configuration error, certain bits in
output word 0 must be set. Either bit 0 or bit 1 (or
both) must be set; and either bit 4 or bit 4 and bit 5
must be set. This is true whether or not the indicated
limit switch is present in the system. Also, there are
certain output combinations that obviously are not
valid (e.g., setting both bit 8 and bit 9). Using an
invalid output combination results in a configuration
error being generated.
bit 0 when a CW limit switch is used
bit 1 set when a CCW limit switch is used
bit 2 set when the pulse train enable/disable input is used
bit 3 set when an external interrupt is used
bit 4 set when a home limit switch input is used
bit 5 set when a home limit proximity limit switch is used
Publication 999-121 - December 1999
bits 6 and 7 not used
bit 8 set when a quadrature encoder is used
bit 9 set when diagnostics feedback is used
Page 40

Configuration and Programming
bit 10 1 when output pulse type is pulse train and direction
0 when output pulse type is CW pulse train and CCW
pulse train
bit 11 not used
bit 12 0 for limit switch home operations
1 for marker pulse home operations
bit 13 and 14 not used
bit 15 1 for configuration mode
0 for command mode
Output word 1: Defines the active levels of the inputs. The bits are
set for high true (logic 1 for input of 7 VDC or higher), or normally
open (NO); or reset for low true (0 V = logic 1), or normally closed
(NC). Note that the active levels of the inputs are taken into account
only when the corresponding input is present in output word 0.
5-5
bit 0 determines the active level of the CW limit switch
bit 1 determines the active level of the CCW limit switch
bit 2 determines the active level of the pulse train disable
input
bit 3 determines the active level of the external interrupt
input
bit 4 determines the active level of the home limit switch
input
bit 5 determines the active level of the home proximity
limit switch input
bits 6 – 15 not used
Output words 2 and 3: Defines the starting (or base) speed of the
Module. The starting speed is the minimum speed at which every
move begins and ends. The starting speed must be higher than the
speed at which low frequency resonance occurs in the stepper motor,
and is dependent on motor characteristics. The format for starting
speed data is:
Word 2 Starting speed most significant word (MSW)
Word 3 Starting speed least significant word (LSW)
Publication 999-121 - December 1999
Page 41

5-6
Configuration and Programming
Configuration mode input image table
The data format of the input image table when the Module is in the
configuration mode is:
Input word 0:
bits 0-5, 8-10 identical to like numbered bits in output table
bits 6, 7 and 11 not used
bit 13 configuration error: 1 = error; 0 = no error
bit 14 Module OK: 1 = Module operational,
0 = fatal error encountered
bit 15 1 when in configuration mode
0 when in command mode
Input word 1:
bits 0-5 same as corresponding bits in output word 1
bits 6-15 not used
Input words 2 and 3 are identical to output words 2 and 3.
Invalid Configurations
The following configurations can be programmed, but are not
acceptable to the Module, and causes the configuration error, input
Publication 999-121 - December 1999
Page 42

Configuration and Programming
word 0 bit 13, to be true and turn on the red FLT LED indicator if
attempted.
• A configuration file that does not provide the ability to home the
Module, either by means of a home limit switch and home limit
switch operations, or quadrature encoder and marker pulse
operations.
• A configuration file that does not contain a limit endpoint, either
CW or CCW
.
• A configuration file that specifies both quadrature encoder and
diagnostic feedback.
• A configuration file that specifies a marker pulse home without
specifying both a quadrature encoder and a home proximity
limit switch.
• A configuration file that specifies a home proximity limit without
specifying the home limit switch.
5-7
• A configuration file that specifies diagnostic feedback with CW
and CCW pulse outputs.
• A configuration file that calls for a starting speed outside the
design range (1-250,000 pulses per second).
Publication 999-121 - December 1999
Page 43

5-8
Configuration and Programming
Programming Command
Mode
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Output Words – SLC Processor to Stepper Controller
Output Command Word 0 Bit Definition
WORD 0
Absolute Move
Relative Move
Hold Motion
Resume Move
Immediate Stop (pulse train off)
Find Home + CW
Find Home -
Jog +
Jog -
Preset Position
Reset Errors
Program Blend Move Profile
Read Blend Data
Run Blend Move Profile
Preset Encoder Position
Mode Flag 1 Configuration Mode
CCW
CW
CCW
0 Command Mode
Decimal
Value
1
2
4
8
16
32
64
128
256
512
1024
2048
4096
8192
16384
-32768
Publication 999-121 - December 1999
Command Mode Output Words
Page 44

15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Configuration and Programming
5-9
WORD 1
WORD 2
WORD 3
WORD 4
WORD 5
WORD 6
Word 1
reserved
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Word 2 Position
MSW 0-to 8388
(1000s)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Word 3 Position
LSW 0-999
(1s)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Word 4 Velocity (pulses/sec)
MSW (1000s) 0-250
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Word 5 Velocity
LSW (1s)
0 to 999 pulses/sec
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Word 6 Acceleration
pulses/ms/sec
1 to 2000
WORD 7
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Word 7 Deceleration
pulses/ms/sec
1 to 2000
Publication 999-121 - December 1999
Page 45

5-10
Configuration and Programming
Output Command Bits for Word 0
Bit Description
0 Absolute Move
1 Relative Move
2 Hold Motion
3 Resume Move
4 Immediate Stop (pulse train off)
5 Find Home +/(Up)
6 Find Home –/(Down)
7 Jog +/(Up)
8 Jog –/(Down)
9 Preset Position
10 Reset Errors
11 Program Blend Move Profile
12 Read Blend Data
13 Run Blend Move Profile
14 Preset Encoder Position
15 Mode Flag:1 Configuration Mode
0 Command Mode
Publication 999-121 - December 1999
Page 46

Configuration and Programming
5-11
Notes:
1. A 0 to 1 transition of the above control bits must occur to cause
the associated operation to take place.
2. Reaching either the CW or CCW limit switch during a normal
move or jog operation is treated in the same manner as a pulse
train enable/disable input. That is, the motor stops and the
current position becomes invalid. The “one shot jog” feature
defined in the Jog Commands, later in the chapter, must then be
used to move the motor away from the limit switch.
3. The data format of output words 1-7 is decimal.
4. Most significant words (MSW) contain the 1000s places (the
upper four digits) of the velocity and position data. The least
significant word (LSW) contains the 1s, 10s and 100s places (the
lower three digits).
5. A negative position value is indicated by setting the most
significant bit in output word 2.
6. The position parameter has a range of ±8,388,607.
7. The velocity parameter has a range of starting speed ≤ velocity ≤
250,000.
8. The acceleration and deceleration parameters have a range of 1
≤ acceleration/deceleration ≤ 2000 and is measured in pulses
per millisecond per second.
Absolute/relative move commands
Set bit 0 to command an absolute move. Set bit 1 to command a
relative move. Bit 15, the most significant bit of command mode
output word 2 (msw position), can be used to denote a ccw move. A
1 produces a ccw move, while a 0 produces a cw move. Note that
CCW and CW refer to direction of stepper motor rotation.
The current position of the axis must be valid in order to perform an
absolute move, but not to perform a relative move. The current
position is not valid following a “power-up” or a configuration
operation.
IMPORTANT
A home operation or a preset must be performed to
validate the current position.
Publication 999-121 - December 1999
Page 47

5-12
Configuration and Programming
In an absolute move, the number of pulses generated by the Module
equals the difference between the target position (destination) and the
current position.
In a relative move, the target position defines the distance (in pulses)
that must be traveled relative to the current position.
Normally, both types of move accelerate to the programmed velocity
(slew speed) at the commanded acceleration rate; continue at the
velocity to a predetermined point; and then decelerate to the target
position at the commanded deceleration rate to the starting speed and
stop. This type of move generates a trapezoidal velocity profile, as
illustrated below.
Velocity
Trapezoidal velocity profiles
with programmable acceleration/
deceleration pulse rates.
Starting
Speed
Time
However, if a commanded move is not long enough to attain the
programmed velocity before the deceleration point is reached, a
triangular velocity profile is generated. This profile is shown below.
Velocity
Starting
Speed
Time
Blended Moves permit more sophisticated velocity profiles. The figure
below is an example of a move containing 2 segments blended
together.
Velocity
Blended velocity profiles to
permit high speed traverse and
low speed positioning moves.
Publication 999-121 - December 1999
Starting
Speed
Time
Upon successful completion of each move, the “move complete” bit
(7) of command mode input word 0 is set, permitting the next move
to proceed. Failure to complete a move generates an error signal,
which sets the appropriate error flag in the command mode input
word image table (bit 11, 12 or 13).
Page 48

Configuration and Programming
+
5-13
Hold move command: causes a controlled deceleration to the
starting speed and stop. Upon completion of the hold stop, the hold
state input (bit 2, word 0) of the command mode input word image
table is set. While the hold move is in effect, velocity and acceleration
or deceleration parameters can be changed. Specifying a new
position, however, has no effect. If no error occurs during a hold
move operation, the interrupted move can be resumed, with new
velocity and acceleration or deceleration parameters, upon receipt of
a resume move command.
IMPORTANT
If a hold move command is issued during a blend
move operation, the Module runs the blend move
profile to completion, and then set the “command
error” bit (word 0, bit 12) in the command mode
input image table. Hold does not stop a Jog move.
Resume move command: permits a previously held absolute or
relative move to continue from the point of the hold. An interrupted
blend move cannot be continued by a resume move command,
however. The hold state input flag turns off when the resume move
command has been acted upon.
A move can be held and then resumed a number of times, until one of
the following occurs:
• The axis reaches its target position.
• An error condition occurs.
• Some other command is issued.
Immediate stop (pulse train off) command: brings a current move
operation to a stop, without deceleration ramp. Bit 4 of command
mode input word 0 is set. The position invalid bit (bit 10) also sets, if
the axis was moving at the time the immediate stop command is
issued.
IMPORTANT
It is possible to perform a Relative Move after an
Immediate Interrupt has occurred. However, you can
not resume an absolute move.
Find home
/ (CW) and Find home – / (CCW) commands.
The way in which these commands are executed is dependent on
whether or not a home proximity limit switch is present (as selected in
the configuration output image table). When a find home command is
issued with a home proximity limit switch present, the axis accelerates
to the programmed velocity and runs at that speed until the home
proximity switch is detected. The axis then decelerates to the starting
Publication 999-121 - December 1999
Page 49

5-14
Configuration and Programming
speed and runs at that speed until the home limit switch is contacted
or marker is detected (depending on which is configured), and then
stops. Without a home proximity limit switch present, the axis speed
moves at the configured starting speed until the home limit switch is
detected. In this instance, the normal acceleration/deceleration and
velocity parameters are disregarded.
The find home command requires the presence of at least one end
limit switch, whether or not a home proximity switch is present. If
only one end limit switch is used, it is the programmer's responsibility
to ensure that the find home command has the correct direction (+ or
–). The Module does not accept a find home command unless the
corresponding end limit switch is present [CW limit switch for +/(CW)
command; CCW limit switch for –/(CCW) command]. An incorrect find
home command generates an invalid command input error.
Homing Routines
Home to Limit Switch
When Find Home is initiated, it performs the Home at base speed
until the Limit Switch is found. It then stops and sets the position to
zero.
Home to Proximity Limit Switch and Home Limit Switch
When the Find Home command is issued, it homes at the commanded
speed until the proximity switch is reached. It then moves at the base
speed until it reaches the limit switch where it stops and sets the
position to zero.
Home to Proximity Limit Switch and Marker
When the Find Home command is issued, it moves at the commanded
speed until it contacts the proximity switch. It then moves at the base
speed until the marker is found. Upon finding the marker it stops and
sets the position to zero.
Publication 999-121 - December 1999
If either of the end limit switches is reached during a home operation,
the motor reverses direction and searches for the home limit or home
proximity switch. For this reason, it is important to set the velocity at a
low enough rate to guard against motor lock up during direction
changes.
Page 50

Configuration and Programming
5-15
Note: If you are using a home limit switch and a home proximity limit
switch and a right to left home command is required to home the axis,
mount the home proximity limit switch to the right of the home limit
switch. If a left to right home command is required, mount the limit
switches opposite to the above. See the diagrams below to properly
locate the home limit switches.
Home Limit Switch
Hi Transition
Home complete
Proximity Limit Switch
Hi Transition
Axis Stop Home
Invalid
Proximity Limit Switch
Hi Transition
Start Homing
CCW Direction
Valid Home Configuration
Home Limit Switch
Hi Transition
Start Homing
CCW Direction
Invalid Home Configuration
Jog + / (CW) and Jog – / (CCW) commands.
This command causes the axis to operate in the jog mode, at the
programmed velocity and in the designated direction. If the velocity
specified for the jogging operation is below the programmed starting
speed, the starting speed is ignored. However, if the specified velocity
is above the starting speed, the axis jog move begins at the starting
speed, accelerates to the specified velocity and runs at that velocity
until one of the following occurs:
• The jog command bit is turned off.
• An external interrupt input is activated.
• The immediate stop output bit is set.
• The emergency stop input is activated.
When either the jog command is turned off or the external interrupt
input is activated, the axis decelerates to the starting speed and then
stops. The valid axis position is retained. If, however, either an
immediate stop output bit is set or the pulse train enable/disable input
is activated, the axis stops and the position is invalid.
One Shot Jog: When it is necessary to move the stepper motor while
one of the inputs is active, the jog bit can be made to cause the
Publication 999-121 - December 1999
Page 51

5-16
Configuration and Programming
Module to output one pulse in the specified direction. This is referred
to as a “one shot jog,” and can be made to occur during any 0 to 1
transition of the jog bit, while the velocity is set to zero speed.
Preset position: sets the current axis position to the programmed
value. The desired position value is copied into the current position
input words. If the position is currently invalid, issuing the preset
position command causes the position to become valid.
Reset errors: clears all non-fatal errors detected by the Module. A
non-fatal error is one from which the Module can recover. An
example of a non-fatal error is a request for an absolute move when
the current position is not valid. A non-fatal error inhibits all Module
operations until the reset errors command is issued.
Preset encoder position: sets the current encoder position to the
programmed value implied in command words 2 and 3.
Programming Simple
Moves
General Information
Certain applications merely involve a series of moves to discrete
positions, with a wait between moves. In this case, simply place the
value for each position in words 2 and 3 of the slot address of the
Module; then turn on bit 0 of word 0 of the slot address. Once the axis
is moving, bit 0 can be turned off. The values for the velocity,
acceleration, and deceleration are controlled by words 4 and 5, 6, and
7 respectively. This allows acceleration and deceleration to be
programmed at different rates, if necessary.
Data File Structures
SLC Processor data files can be used to determine the parameters for
either simple or complex move profiles. The only difference between
simple and complex moves is the method used to handshake with the
Module. If speed blending of two or more moves is required, the
programmer is responsible for handshaking the information from the
SLC processor data file to the proper words assigned to the slot
address. If either the starting speed or velocity changes with each
move segment, the logic may be simplified by setting up additional
files to transfer data from the files to the Module using a sequencer,
move or copy instruction.
Publication 999-121 - December 1999
Page 52

Configuration and Programming
5-17
Using the N Files for Motion Commands
The following example is used to denote an axis move equal to 1001
pulse counts, in the CW (+) direction. Word N9:23 contains the
information in the (LSW) words which is the fine position in counts.
These values can range from 0 to 999. Coarse position information is
stored in word N9:22. The combination of coarse and fine position
information determines how many counts the axis moves. If there is
no coarse position information, a negative sign in the fine position
word can be used to denote the axis direction. The move segment is
made up of N9:22 and N9:23. N9:22 = 1 counts and N9:23 = 1 count.
Motion commands are executed using the copy instruction as
indicated in the program example represented by rung 3 of the
“Application Examples” in Chapter 6 of this manual.
Pos
Function Command (Reserved)
Address 0 1 234567
(MSW)
Pos
(LSW)
Vel
(MSW)
Vel
(LSW)
Accel Decel
N9:20 1 0 1 1 10 0 6 6
Quadrature Encoder Input
The Module supports a quadrature encoder with differential line
driver outputs. The marker channel of the encoder is optional and
provides an additional level of accuracy to the original home position
(reference position), if required. The same circuitry is used for the
loop back diagnostics and the quadrature encoder. The quadrature
encoder output is read directly as counts and passed through to the
backplane as the feedback value in words 4 and 5.
IMPORTANT
If the encoder is used, it must be disconnected from
the controller whenever loop back diagnostics are
being performed.
Use of Direct Inputs
There are a total of six direct inputs to the Module. They are: External
Interrupt Input, Home Limit Switch Input, Home Proximity Switch
Input, CW Limit Switch Input, CCW Limit Switch Input, and Pulse
Train Enable/Disable Input. They connect to Module Input/Output
Publication 999-121 - December 1999
Page 53

5-18
Configuration and Programming
terminals 6 through 11, respectively. The Module responds to these
direct inputs as follows:
• External Interrupt Input – When this input is turned on, the axis
decelerates to the programmed starting speed, and then stops.
This input works only when a jog operation is being performed.
The axis does not stop if this input is activated during any other
type of move operation.
• Home Limit Switch Input – Activating this input indicates to the
Module that the current find home operation is complete, and
stops axis motion.
• Home Proximity Switch Input – Activating this input during a
find home operation affects the homing sequence. Refer to Find
Home +/(CW), Find Home –/(CCW), earlier in this chapter for
further information.
• CW or CCW Limit Switch Input – If either of these inputs is
activated during a find home operation, the motor reverses
direction and begins looking for the home limit switch or home
proximity switch, as applicable. If either the CW or CCW limit
switch input is activated during a normal move or jog move
operation, the pulse train output is disabled immediately; the
present position then becomes invalid.
Programming Blended
Moves
• Pulse Train Enable/Disable Input – If this input is activated, the
Module pulse train output to the motor ceases and the present
position becomes invalid.
General Information
The blend move command permits the Module to blend motion
segments together to create more complex move profiles. A move
profile can consist of 2 to 16 segments. Each segment is defined by
four parameters: absolute target position, velocity, acceleration rate,
and deceleration rate.
The minimum amount of information required to define a new move
segment is a change in both the absolute target position and the
velocity. Changes in acceleration and deceleration rates are not
required. If both a new target position and a new velocity are not
specified, the command error input bit is set.
Blend move profiles can be programmed in a single block, and the
segments stored in the internal memory of the Module. Each blend
move profile is programmed as a series of absolute moves, which
Publication 999-121 - December 1999
Page 54

Configuration and Programming
5-19
means the axis position must be valid for a blend move operation to
take place. The first segment of each blend move profile always starts
at the programmed starting speed and accelerates up to the
programmed velocity. The starting speed for the next segment in the
profile is equal to the velocity specified for the previous segment.
IMPORTANT
The final segment stops at the specified starting
speed and must have a programmed velocity equal
to the starting speed, or a command error is
generated. A command error is also generated if a
direction reversal is encountered during a blend
move operation.
Because the data for a blend move profile is stored in the Module
memory, a profile can be run more than once. Since blend moves are
made up of a series of absolute moves, the starting position for each
blend move profile must be the same each time the profile is initiated.
Note that other move or homing operations can be performed
between reruns of the same blend move profile.
IMPORTANT
A command error is generated if a blend move is
started from a different position.
Blend move programming routine
Following is a description of how a typical blend move profile is
programmed. For this discussion, it is assumed that the Module is in
slot 2 of the SLC rack. The related ladder diagram follows the final
step in the programming routine.
1. The SLC Processor sets the program blend move profile bit (O:2/
11).
2. The Module responds by setting the blend move mode bit (I:2/
8) and send next blend move data bit (I:2/9).
3. In response to the send next blend move data bit, the SLC
Processor writes the data for the first blend move segment into
the command mode output image table, and sets the read blend
data bit (O:2/12).
4. The Module checks the first segment's data. If this data is not
correct, the Module sets the command error bit (I:2/12). If the
data is correct, the Module resets the send next blend move data
bit (I:2/9).
Publication 999-121 - December 1999
Page 55

5-20
Configuration and Programming
5. Resetting the send next blend move data bit causes the SLC
Processor to reset the read blend data bit (O:2/12).
6. The Module again sets the send next blend move data bit in
response to resetting the read blend data bit.
7. The sequence described in steps 3 – 6 is repeated until all the
segments making up the blend move profile have been read.
The minimum number of segments is 2; the maximum number is
16.
8. When the last segment has been sent to the Module, the SLC
Processor program resets the program blend move profile bit
(O:2/11), and exits the blend move mode.
9. The Module then resets the blend move mode bit (I:2/8) and the
send next blend move data bit (I:2/9).
10. When a blend move profile is to be run, the SLC Processor sets
the run blend move profile bit (O:2/13). Note that no blend
move profile can be run until this bit has been set.
11. When the run blend move profile bit has been set, the Module
sets the blend move mode bit (I:2/8), and then executes the
profile program.
12. After all segments in the profile have been run, the Module sets
the move complete bit (I:2/7), and resets the blend move mode
bit (I:2/8).
13. Steps 10, 11 and 12 can be repeated as long as the profile is
started from the same position each time.
Publication 999-121 - December 1999
Page 56

Configuration and Programming
5-21
Publication 999-121 - December 1999
Page 57

5-22
Configuration and Programming
Module Status Inputs
While the Module is operating in the command mode, its status is
reported to the SLC Processor via the command mode input image
table. This input file has the following format.
Input Word 0
bit 0 is set when the axis is moving CW
bit 1 is set when the axis is moving CCW
bit 2 is set when Module is in hold state
bit 3 is set when axis is stopped (typically used with an
immediate stop or a pulse train disable)
bit 4 is set when axis is in home position
bit 5 is set when axis is accelerating
bit 6 is set when axis is decelerating
Publication 999-121 - December 1999
bit 7 is set when current move is complete (not used with
jog-type moves)
bit 8 is set when Module is in blend move mode
Page 58

Configuration and Programming
bit 9 send next blend move data bit
bit 10 is reset if position is valid
bit 11 is set when input error exists
bit 12 is set when command error exists
bit 13 is set when configuration error exists
bit 14 is set when Module is OK
bit 15 mode flag:1 for configuration mode
0 for command mode
5-23
Publication 999-121 - December 1999
Page 59

5-24
Configuration and Programming
Notes:
1. Direction of travel (CW or CCW) is established looking at the
shaft end of the stepper motor.
2. Bit 11 (Input Error) is set by activating either the CW or CCW
limit switch, or by an immediate stop input. It can only be
cleared by a home or a preset operation. The input error flag is
not set if the correct end limit is reached during a normal home
move operation, since reaching the end limit is an integral part
of the home move operation.
3. Bit 14 (Module OK) is set as long as the Module is operating
normally. Only a fatal error can reset this bit.
Input Word 1
bit 0 is set when CW limit switch input is active
bit 1 is set when CCW limit switch input is active
bit 2 is set when immediate stop input is active
bit 3 is set when external interrupt input is active
bit 4 is set when home limit switch input is active
bit 5 is set when home proximity limit switch input is active
bits 6-7 not used
bit 8 Home Invalid Bit
bits 9-15 not used
Publication 999-121 - December 1999
Page 60

Configuration and Programming
5-25
Notes:
1. When set, bit 3 (external interrupt) indicates that the Module has
initiated a controlled stop, only during a jog operation. The
stepper motor decelerates to the programmed starting speed,
and then stops. The current position information is retained.
2. When set, bit 2 indicates an external pulse train enable/disable
function has occurred. This identifies an uncontrolled stop, in
which normal deceleration did not occur and axis position data
is lost. This bit is set when a command is applied to input
terminal 11 on the front panel of the module.
3. When set, bit 8 indicates that either the system has detected the
wrong proximity to home switch sequence (i.e., proximity
switch detected after already reading a transition on the home
switch), or two different overtravel limit switches have been
detected during a home operation.
Input Words 2 and 3
Input words 2 and 3 report current position data, based on the
number of pulses that have been sent to the stepper motor. Note that
this value may be different from the encoder value in words 4 and 5.
Diagnostics Feedback Test
Input Words 4 and 5
Input words 4 and 5 report the axis position based on either feedback
from an optional encoder attached to the stepper motor or diagnostic
feedback when configured. Note that this value may be different from
the current position in words 2 and 3. The value has a range of
±8,388,607 counts, equalling the limits of the Module. The optical
encoder values must be mechanically coupled to the motor. The
optical encoder values are not updated to the SLC backplane unless a
command is issued to the translator. Encoder direction values may be
independent of the motor direction, e.g. motor direction may be the
plus direction while encoder values decrease. The optical encoder
values do not change unless the stepper motor is turning. It is
possible for the encoder values to be increasing or decreasing
independently of the direction of motor rotation.
To perform a diagnostic feedback test, the Module must be configured
for diagnostic feedback, using the loop back feature, and pulse and
direction output. The external DC power supply must also be active,
Publication 999-121 - December 1999
Page 61

5-26
Configuration and Programming
in order to generate the output pulses. Wiring for the diagnostic
feedback test is shown in the following diagram.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
Configuration Data for Loop Back Diagnostic Test
N9 Configuration for Loop Back Diagnostics Test:
N9:0–3120923100 00000
move
complete
1=yes
I:1
7
feedback=
command MSW
EQU
EQUAL
Source A I:1.2
-32753
Source B I:1.4
-32753
Ladder Instructions for Loop Back Diagnostics Test
This rung is used to test the loopback information. Command should
equal feedback when the move is complete. The Module is shown in
slot 1 for this example.
feedback=
command LSW
EQU
EQUAL
Source A I:1.3
0
Source B I:1.5
0
NOTE: In the above rung, use of the EQU (equal) test means that
source A equals the command in both the MSW and LSW words;
source B in both cases, is the value reported by the loop back
diagnostic.
test okay
O:0
( )
4
Publication 999-121 - December 1999
Page 62

move
complete
1 = yes
I:1
7
This rung is used to test the loopback to specific tolerances as defined
by the less than and greater than tests. If the test fails the error output,
SLC output 1 is turned on and the unit must be power cycled to reset
it (based on this ladder logic).
less than 0 = err
LES
LESS THAN
Source A I:1.5
0
Source B 0
greater than test val = err
GRT
GREATER THAN
Source A I:1.5
0
Source B N7:10
10
Configuration and Programming
Latch error output
O:0
( L )
1
5-27
Publication 999-121 - December 1999
Page 63

5-28
Configuration and Programming
Command Mode Input Words
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
WORD 0
WORD 1
WORD 2
WORD 3
WORD 4
WORD 5
Word 0 Input
Status Bits
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Word 1
Status Bits
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Word 2 (MSW)
Current Position Value
1 to 8388 (thousands)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Word 3 (LSW)
Current Position Value
0 to 1000
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Word 4 (MSW)
Encoder Position
1 to 8388 (thousands)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Word 5 (LSW)
Encoder Position
0 to 1000
WORD 6
WORD 7
Publication 999-121 - December 1999
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reserved
Page 64

Application Examples
Chapter
6
Chapter Objectives
This chapter contains an application example, in the form of a ladder
diagram, to help you construct an actual program for the Module,
using the SLC Processor.
Data table used for the program listing for
Sample Module Check Procedure
Program Listing for Sample Module Check Procedure
The following ladder diagram represents a sample program that can
be used for a check of the Module. It is not intended as an actual
operation program.
1 Publication 999-121 - December 1999
Page 65

6-2
Application Examples
Publication 999-121 - December 1999
Page 66

Application Examples
6-3
Publication 999-121 - December 1999
Page 67

6-4
Application Examples
Entering Negative Position Data
The position data is sign magnitude. There are three ways to easily
assign a negative number:
• Using the ladder
• Manipulating the bits manually
• Calculating manually
To enter negative position data using the ladder:
1. Divide the absolute value into most (MSW) and least significant
(LSW) words.
2. Use bitwise “inclusive or” with MSW and 32768.
3. Place the result in the position MSW, LSW.
Publication 999-121 - December 1999
Page 68

Application Examples
To enter negative position data by manipulating the bits manually:
1. Divide the absolute value into MSW, LSW.
2. Enter both MSW and LSW into the position MSW,LSW via
decimal.
3. Change radix to binary.
4. Set MSB (15) of the MSW.
To enter negative position data by calculating manually:
1. Divide the absolute value into MSW, LSW.
2. Enter the LSW value directly into position LSW.
3. Add the value of MSW to -32768.
4. Place the value into position MSW.
6-5
For example:
1. –5999 / MSW,LSW = 5, 999
2. Assign position LSW = 999
3. 5 + (–32768) = –32763
4. Assign position MSW = –32763
Converter Example
The following diagram shows the ladder programming for a converter.
Publication 999-121 - December 1999
Page 69

6-6
Application Examples
Publication 999-121 - December 1999
Page 70

Application Examples
6-7
Publication 999-121 - December 1999
Page 71

6-8
Application Examples
Publication 999-121 - December 1999
Page 72

Appendix
A
Specifications
This chapter defines module design characteristics, both electrical and
mechanical, and operating parameters relating to its application and
compatibility with other system components.
Industry Standards
General Specifications
• Backplane isolation to protect other Modules and the processor
from external transient voltages.
• Motion is inhibited whenever the power up sequence is in
progress or the SLC processor is placed in program mode.
Number of Axes 1
Applicable Interfaces Stepper motor driver
Pulse Train Switching 7 to 30 ma @ 5 VDC
Speed Range 1 to 250,000 pulses per second
Acceleration 1 to 2000 pulses per second Trapezoidal velocity profile
Acceleration Step Rate 4 milliseconds or less
LED Indicators
Color
Description
Green RUN – indicates the processor is running. Extinguished in case of watchdog
timeout.
Green CW – indicates motion in the clockwise direction.
Green CCW – indicates motion in the counter-clockwise direction.
Red Error – indicates data transfer error.
Red Fault – lights when the Module is not configured.
1 Publication 999-121 - December 1999
Page 73

A-2
Specifications
Power Requirements
• Backplane 5 Volts DC 2 A
• User Power 24 Volts DC 09A Max.
System Limitations
Number of modules per chassis is limited by the SLC power supply
and applications scan time requirements.
Discrete Inputs
External Interrupt (7-24 VDC) Single Ended
Home limit switch (7-24 VDC) Single Ended
Home Proximity Input (7-24 VDC) Single Ended
CW travel Limit input (7-24 VDC) Single Ended
CCW travel Limit input (7-24 VDC) Single Ended
Emergency Stop (7-24 VDC) Single Ended
Encoder Channel A (5 VDC) Differential
Encoder Channel B (5 VDC) Differential
Encoder Marker Channel (5 VDC) Differential
Discrete Outputs
CW or non-directional pulse output Differential Output
CCW pulse or direction signal output Differential Output
Publication 999-121 - December 1999
Page 74

Specifications
A-3
Input/Output Terminals
These terminals supply power and inputs to the Module and outputs
to attached devices. They can accommodate two #14 gauge Wires.
Environmental Operating Conditions
Operating / Inlet Air Temperature 0° to 60° C (32° to 140° F)
Altitude up to 2000 M (6562 Ft)
Humidity 5 to 95% non-condensing
Storage Temperature
–40° to 85° C (–40° to 185° F)
Feedback Circuitry
• None required
• Optional Differential A quad B Encoder with marker Channel
Program Storage Requirements
Applications Program Storage: no local storage (uses SLC processor)
Applications Parameters Storage: no local storage (uses SLC processor)
Module Address: Determined by chassis location
Homing Method: Determined by backplane configuration
Processor Compatibility
Compatible SLC Processors: SLC 500™, SLC 5/01™, SLC 5/02™,
SLC 5/03™, SLC 5/04™, and SLC 5/05™.
Publication 999-121 - December 1999
Page 75

A-4
Specifications
Publication 999-121 - December 1999
Page 76

Appendix
B
Input/Output Quick Reference
CONFIG OUTPUT WORD 0 CONFIG INPUT WORD 0
Bit 0 set when a CW limit switch is used Bit 0 set when CW limit switch is configured
Bit 1 set when a CCW limit switch is used Bit 1 set when CCW limit switch is configured
Bit 2 set when the pulse train enable/disable input
is used
Bit 3 set when an external interrupt is used Bit 3 set when an ext interrupt is configured
Bit 4 set when a home limit switch is used Bit 4 set when a home limit switch is configured
Bit 5 set when a home proximity limit switch is
used
Bit 6 not used Bit 6 not used
Bit 7 not used Bit 7 not used
Bit 8 set when a quadrature encoder is used Bit 8 set when a quadrature encoder is configured
Bit 9 set when a diagnostic feedback is used Bit 9 set when diagnostic feedback is configured
Bit 10 0 = output pulse type is CW/CCW pulse train
1 = output pulse type is pulse train and
direction
Bit 11 not used Bit 11 not used
Bit 12 0 = limit switch home operation
1 = marker pulse home operation
Bit 13 not used Bit 13 configuration error: 0 = no error
Bit 14 not used Bit 14 Module OK:0 = fatal error encountered
Bit 15 0 = command mode
1 = configuration mode
Bit 2 set when pulse train enable/disable switch is
configured
Bit 5 set when a home proximity limit switch is
configured
Bit 10 set when output pulse type is pulse train and
direction
Bit 12 reset when limit switch home operation is
configured; set when marker pulse home is
configured
1 = error
1 = module operational
Bit 15 0 = command mode
1 = configuration mode
CONFIG OUTPUT WORD 1 CONFIG INPUT WORD 1
Bit 0 determines the active level of the CW limit
switch
Bit 1 determines the active level of the CCW limit
switch
Bit 2 determines the active level of the pulse train
disable input
Bit 3 determines the active level of external
interrupt input
Bit 4 determines the active level of the home limit
switch input
1 Publication 999-121 - December 1999
Bit 0 reflects active level of the CW limit switch
configured
Bit 1 reflects active level of the CCW limit switch
configured
Bit 2 reflects active level of the pulse train disable
input configured
Bit 3 reflects active level of the ext interrupt input
configured
Bit 4 reflects active level of the home limit switch
input configured
Page 77

B-2
Input/Output Quick Reference
CONFIG OUTPUT WORD 1 CONFIG INPUT WORD 1
Bit 5 determines the active level of the home
proximity limit switch input
Bit 5 reflects active level of the home prox limit
switch input configured
Bits 6 through 15not used Bits 6 through 15not used
CONFIG OUTPUT WORDS 2 and 3 CONFIG INPUT WORDS 2 and 3
Word 2 starting speed most significant word (MSW) Word 2 reflects the starting speed most significant
word as configured in output word 2
Word 3 starting speed least significant word (LSW) Word 3 reflects the starting speed least significant
word as configured in output word 3
COMMAND OUTPUT WORD 0 COMMAND INPUT WORD 0
Bit 0 absolute move Bit 0 set when the axis is moving CW
Bit 1 relative move Bit 1 set when the axis is moving CCW
Bit 2 hold motion Bit 2 set when the module is in a hold
Bit 3 resume motion Bit 3 set when the axis is stopped
Bit 4 immediate stop Bit 4 set when the axis is in home position
Bit 5 find home
+
Bit 5 set when the axis is accelerating
Bit 6 find home – Bit 6 set when the axis is decelerating
Bit 7 jog
+
Bit 7 set when the current move is complete
Bit 8 jog – Bit 8 set when the module is in a blend move
mode
Bit 9 preset position Bit 9 send next blend move data bit
Bit 10 reset errors Bit 10 reset if position is valid
Bit 11 program blend move profile Bit 11 set when input errors exist
Bit 12 read blend move profile Bit 12 set when a command error exists
Bit 13 run blend move profile Bit 13 set when a config error exists
Bit 14 preset encoder portion Bit 14 set when the module is OK
Bit 15 mode flag:0 = command
1 = config
Bit 15 mode flag:0 = command
1 = config
COMMAND OUTPUT WORD 1 COMMAND INPUT WORD 1
reserved Bit 0 set when CW limit switch is active
COMMAND OUTPUT WORD 2 Bit 1 set when CCW limit switch is active
Bit 2 set when immediate stop input is active
Position MSW 0 – 8338 Bit 3 set when external interrupt is active
COMMAND OUTPUT WORD 3 Bit 4 set when home limit switch is active
Bit 5 set when home proximity limit switch is
active
Position LSW 0 – 999 Bits 6 through 15not used
Publication 999-121 - December 1999
Page 78

Input/Output Quick Reference
COMMAND OUTPUT WORD 4 COMMAND INPUT WORDS 2 and 3
Velocity (pulses/sec) MSW 0 – 250 report the current position data based on the number of pulses
that have been sent to the stepper motor
COMMAND OUTPUT WORD 5 COMMAND INPUT WORDS 4 and 5
Velocity (pulses/sec) LSW 0 – 999 report the axis position based on the feedback from an optional
encoder
COMMAND OUTPUT WORD 6
Acceleration (pulses/ms/sec) 1 – 2000
COMMAND OUTPUT WORD 7
Deceleration (pulses/ms/sec) 1 – 2000
B-3
Publication 999-121 - December 1999
Page 79

B-4
Input/Output Quick Reference
Publication 999-121 - December 1999
Page 80

I-1
A
application examples
6-1
C
chapter 1 objectives
chapter 2 objectives
chapter 3 objectives
chapter 4 objectives
chapter 5 objectives
chapter 6 objectives
chapter 7 objectives
chapter 8 objectives
configuration and programming
Configuration and Status Bits
Contents of Manual
P-1
1-1
4-1
5-1
6-1
2-1
3-1
A-1
5-1
5-1
P-1
D
definitions
diagnostics feedback test
P-2
5-25
E
encoder and feedback connections
examples
6-1
2-7
G
general precautions
general specifications
discrete inputs
discrete outputs
environmental operating conditions
feedback circuitry
input/output terminals
LED indicators
power requirements
processor compatibility
program storage requirements
storage temperature
system limitations
2-1
A-2
A-2
A-3
A-3
A-3
A-1
A-2
A-3
A-3
A-3
A-2
H
Homing Routines
Home to Limit Switch
Home to Proximity Limit Switch and Home Limit Switch
Home to Proximity Limit Switch and Marker
5-14
5-14
5-14
5-14
I
industry standards
Input/Output Quick Reference
installation and wiring
Intended Audience
A-1
B-1
2-1
P-2
M
manual overview
Module
command mode operation
configuration mode
diagnostic mode
input/output terminals
LED Indicator diagnostics
operating modes
terminal block release screws
Module Configuration
Module configuration
configuration error
configuration mode input image table
configuration mode output image table
general information
invalid configurations
Module operation
Module Overview
Module status
configuration data for loop back diagnostic test
input word 0
input word 1
input words 2 and 3
input words 4 and 5
ladder instructions for loop back diagnostic test
Module Status Inputs
Module status inputs
P-1
1-3
1-2
1-3
1-5
1-4
1-2
1-5
5-3
5-3
5-3
5-6
4-1
4-1
5-22
5-24
5-25
5-25
5-22
5-21
N
normal operation
3-1
O
Operating Modes
operating modes
Command
configuration
fixed speed operation
operation using the pulse and direction outputs
origin (home) search sequence of operation
resetting the current absolute position
4-1
4-2
4-1
4-2
5-6
5-3
5-26
5-26
4-2
4-3
4-3
Publication 999-121 - December 1999
Page 81

I-2
operation
3-1
P
Processor configuration files
program listing for sample module check procedure
product support, local
telephone number
Program Scan
programming blended moves
blend move programming routine
general information
Programming Command Mode
programming command mode
absolute/relative move commands
find home +/(CW) and find home -/(CCW) commands
hold move command
immediate stop (pulse train off) command
jog +/(CW) and jog -/(CCW) commands
One Shot Jog
preset position
reset errors
resume move command
output command bits for word 0
output words - SLC Processor to Stepper Controller
Programming Conventions
programming simple moves
data file structures
general information
quadrature encoder input
use of direct inputs
using the N Files for motion commands
P-3
5-1
5-19
5-18
5-8
5-11
5-13
5-13
5-15
5-16
5-16
5-13
5-10
5-1
5-16
5-16
5-17
5-17
5-17
5-13
5-15
6-1
5-8
S
safety precautions
SLC Processor
configuration using APS
configuration using HHT (Catalog 1747-PT1)
SLC Processor Configuration
SLC Processor configuration
specifications
start up, operation and troubleshooting
Starting and Stopping the Module
Stepper Controller Module Overview
Stepper Controller module overview
System Start Up
3-1
5-2
5-1
5-1
A-1
2-2
1-1
3-1
T
terminology
CCW
CW
Engineering Units
Input file
Module
Output file
Physical outputs
Position Loop
SLC Processor
Stepper Translator
Troubleshooting
typical encoder timing diagram
typical input circuitry
P-2
P-2
P-2
P-2
P-2
P-2
P-2
P-2
P-2
P-2
P-2
3-1
2-6
2-5
U
using this manual
P-1
5-2
3-1
1-1
R
removing the Module
Rockwell Automation Support
Rockwell Automation support
Local Product Support
On the Web
Technical product assistance
Publication 999-121 - December 1999
3-3
P-3
P-3
P-2
P-3
W
Wiring
Wiring for a Differential Interface
Wiring Information for TTL Interface
Wiring to Optocoupler Interface
World Wide Web site
2-2
2-3
P-3
2-2
2-5
Page 82

Publication 999-121 - December 1999
Supersedes Publication 999-121 - January 1997 © 1999 Rockwell International Corporation. Printed in th e U.S.A.
4
PN 1746-HSTP1
 Loading...
Loading...