

Page 1
Encoder/Counter
Modules
1734-IJ and 1734-IK
User Manual
Page 2
Important User Information
SHOCK HAZARD
Solid state equipment has operational characteristics differing from those of
electromechanical equipment. Safety Guidelines for the Application,
Installation and Maintenance of Solid State Controls (Publication SGI-1.1
available from your local Rockwell Automation sales office or online at
http://literature.rockwellautomation.com/) describes some important
differences between solid state equipment and hard-wired electromechanical
devices. Because of this difference, and also because of the wide variety of
uses for solid state equipment, all persons responsible for applying this
equipment must satisfy themselves that each intended application of this
equipment is acceptable.
In no event will Rockwell Automation, Inc. be responsible or liable for indirect
or consequential damages resulting from the use or application of this
equipment.
The examples and diagrams in this manual are included solely for illustrative
purposes. Because of the many variables and requirements associated with any
particular installation, Rockwell Automation, Inc. cannot assume responsibility
or liability for actual use based on the examples and diagrams.
No patent liability is assumed by Rockwell Automation, Inc. with respect to
use of information, circuits, equipment, or software described in this manual.
Reproduction of the contents of this manual, in whole or in part, without
written permission of Rockwell Automation, Inc., is prohibited.
Throughout this manual, when neces sary, we u se notes t o make you awa re of
safety considerations.
WARNING
IMPORTANT
ATTENTION
BURN HAZARD
Identifies information about practices or circumstances
that can cause an explosion in a hazardous environment,
which may lead to personal injury or death, property
damage, or economic loss.
Identifies information that is critical for successful
application and understanding of the product.
Identifies information about practices or circumstances
that can lead to personal injury or death, property
damage, or economic loss. Attentions help you:
• identify a hazard
• avoid a hazard
• recognize the consequence
Labels may be located on or inside the equipment (such as
a drive or motor) to alert people that dangerous voltage
may be present.
Labels may be located on or inside the equipment (such as
a drive or motor) to alert people that surfaces may be
dangerous temperatures.
POINT I/O, POINTBus, and RSLogix 5000 are trademarks of Rockwell Automation.
ControlNet is a trademark of ControlNet International, Ltd. DeviceNet is a trademark of Open DeviceNet Vendor Association, Inc.
Page 3
Summary of Changes
This publication contains new and revised information not in the last
release.
New and Revised Information
See the table for a summary of the major changes in this manual.
Chapter Change
2 Addition of Before You Begin section
Addition of attention and warning statements
Update of the Communicate with Your Module section
Appendix A Addition of information on how to configure modules in
RSLogix 5000
Change Bars
W e marked with change bars (as shown with this paragraph) the areas
in this manual that are different from previous editions and indicate
the addition of new or revised information.
1 Publication 1734-UM006B-E N-P - August 2005
Page 4

Summary of Changes 2
Notes:
Publication 1734-UM006B-EN-P - August 2005
Page 5

Preface
About the Modules
Table of Contents
Preface
Purpose of This Manual. . . . . . . . . . . . . . . . . . . . . . . . . . . P-1
Who Should Use This Manual . . . . . . . . . . . . . . . . . . . . . . P-1
Related Products and Documentation. . . . . . . . . . . . . . . . . P-1
Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . P-3
Chapter 1
What This Chapter Contains . . . . . . . . . . . . . . . . . . . . . . . 1-1
Operating Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Counter Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Encoder Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
Period/Rate Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-5
Operation of Scalar . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-6
Rate Measurement Mode . . . . . . . . . . . . . . . . . . . . . . . 1-7
New Data Indicator . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-8
Default Configuration. . . . . . . . . . . . . . . . . . . . . . . . . . 1-8
Operating Mode Features . . . . . . . . . . . . . . . . . . . . . . . . . 1-9
Operating Mode Features. . . . . . . . . . . . . . . . . . . . . . . 1-9
Install the Modules
Chapter 2
What This Chapter Contains . . . . . . . . . . . . . . . . . . . . . . . 2-1
Before You Begin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
Install the Mounting Base/Wiring Base Assembly . . . . . . . . 2-1
Install an I/O Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
Install the Removable Terminal Block . . . . . . . . . . . . . . . . 2-4
Remove a Mounting Base . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
Wire the Modules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
Communicate with the Modules. . . . . . . . . . . . . . . . . . . . . 2-6
Default Data Map for the 1734-IJ/IK Counter Module . . 2-6
Configure Your Encoder/Counter Module . . . . . . . . . . . . . 2-7
Counter Configuration . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
Filter Selection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8
Scalar Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8
v Publicat ion 1734-UM006B-EN-P - Augus t 200 5
Page 6

Input and Output Data
Chapter 3
What This Chapter Contains . . . . . . . . . . . . . . . . . . . . . . . 3-1
Data Table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
Detailed Description of Data Table Information . . . . . . . . . 3-2
Stored/Accumulated Channel Data (Input Word 2) . . . . 3-2
Module/Channel Status and Programming Error Codes
(Input Words 3 and 4) . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
Configuration Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
Counter Configuration (Configuration Word 1) . . . . . . . 3-5
Filter Selection (Configuration Word 2 . . . . . . . . . . . . . 3-5
Decimal Position (Configuration Word 3) . . . . . . . . . . . 3-6
Word 4 is reserved. . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-6
Time Base and Gate Interval (Configuration Words
5 and 6) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-6
Scalar (Configuration Word 7) . . . . . . . . . . . . . . . . . . . 3-7
Scalar Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-7
Rollover (Configuration Word 8). . . . . . . . . . . . . . . . . . 3-7
Preset (Configuration Word 9) . . . . . . . . . . . . . . . . . . . 3-7
Safe State Values (Configuration Word 10) . . . . . . . . . . 3-8
Communicate Real Time/Nonreal Time Information . . . . . . 3-8
Configure Your Module
Access Instantiated Instances
Troubleshoot with the Indicators
Configure Modules in
RSLogix 5000
Chapter 4
What This Chapter Contains . . . . . . . . . . . . . . . . . . . . . . . 4-1
Configuration Overview . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
Add the Adapter to Your Network . . . . . . . . . . . . . . . . 4-1
Add I/O Modules to Your Network. . . . . . . . . . . . . . . . 4-2
Set Counter Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-4
Check I/O Status and View/Edit the EDS File. . . . . . . . . . . 4-6
Chapter 5
What This Chapter Contains . . . . . . . . . . . . . . . . . . . . . . . 5-1
Using Instantiated Instances. . . . . . . . . . . . . . . . . . . . . . . . 5-1
Assemblies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-3
Chapter 6
What This Chapter Contains . . . . . . . . . . . . . . . . . . . . . . . 6-1
Use the Indicators for Troubleshooting . . . . . . . . . . . . . . . 6-1
Appendix A
What This Appendix Contains . . . . . . . . . . . . . . . . . . . . . . A-1
Understand Data, Connections, and Communication Formats A-1
Configure Your Module. . . . . . . . . . . . . . . . . . . . . . . . . . . A-3
Work with the Fault/Program Action Dialog. . . . . . . . . . . . A-4
Work with the Counter Configuration Dialog . . . . . . . . . . . A-5
Index
vi Publication 1734-UM006B-E N-P - August 2005
Page 7
Preface
Purpose of This Manual
Who Should Use This Manual
Read this manual for information about how to install, configure and
troubleshoot your Encoder/Counter module.
For This Information: See:
About the Modules Chapter 1
Install the Modules Chapter 2
Encoder/Counter Module Input and Output Data Chapter 3
Configure Your Encoder/Counter Module Chapter 4
Access Instantiated Instances Chapter 5
Troubleshoot with the Indicators Chapter 6
You must be able to use RSNetworx software or similar configuration
software to set up and calibrate these modules. You must have the
capability to download and use Electronic Data Sheet files.
We assume you know how to do this in this manual. If you do not,
refer to your software user manuals or online help before attempting
to use these modules.
1 Publication 1734-UM006B-E N-P - August 2005
Page 8
Preface 2
Related Products and Documentation
For specification, safety approval, and other information refer to the
following.
• Publication Number 173 4-IN005
Encoder/Counter Installation Instructions
For related 1734 products and documentation see the table.
Description Cat. No. Publication
Very High Speed Counter Modules
Installation Instructions
Analog Input Modules
Installation Instructions
Analog Output Modules
Installation Instructions
DeviceNet Communication Interface
Installation Instructions
Field Potential Distributor
Installation Instructions
POINT I/O 24V dc Expansion Power Supply
Installation Instructions
1734-VHSC5
1734-VHSC24
1734-IE2C
17340IE2V
1734-OE2C
1734-OE2V
1734-PDN 1734-IN057
1734-FPD 1734-IN059
1734-EP24DC 1734-IN058
1734-IN003
1734-IN027
1734-IN002
POINT I/O Selection Guide 1734 series 1734-SG001
Protected Output Module s
Installation Instructions
Relay Output Modules
Installation Instructions
Sink Input Modules
Installation Instructions
Source Output Modules
Installation Instructions
Wiring Base Assembly
Installation Instructions
Wiring Base Assembly
Installation Instructions
1734-OB2E
1734-OB4E
1734-OB8E
1734-OW2
1734-OW4
1734-IB2
1734-IB4
1734-IB8
1734-IV2
1734-IV4
1734-IV8
1734-TB
1734-TBS
1734-TB3
1734-TB3S
1734-IN056
1734-IN055
1734-IN051
1734-IN052
1734-IN511
1734-IN013
Publication 1734-UM006B-EN-P - August 2005
Page 9
Preface 3
Definitions
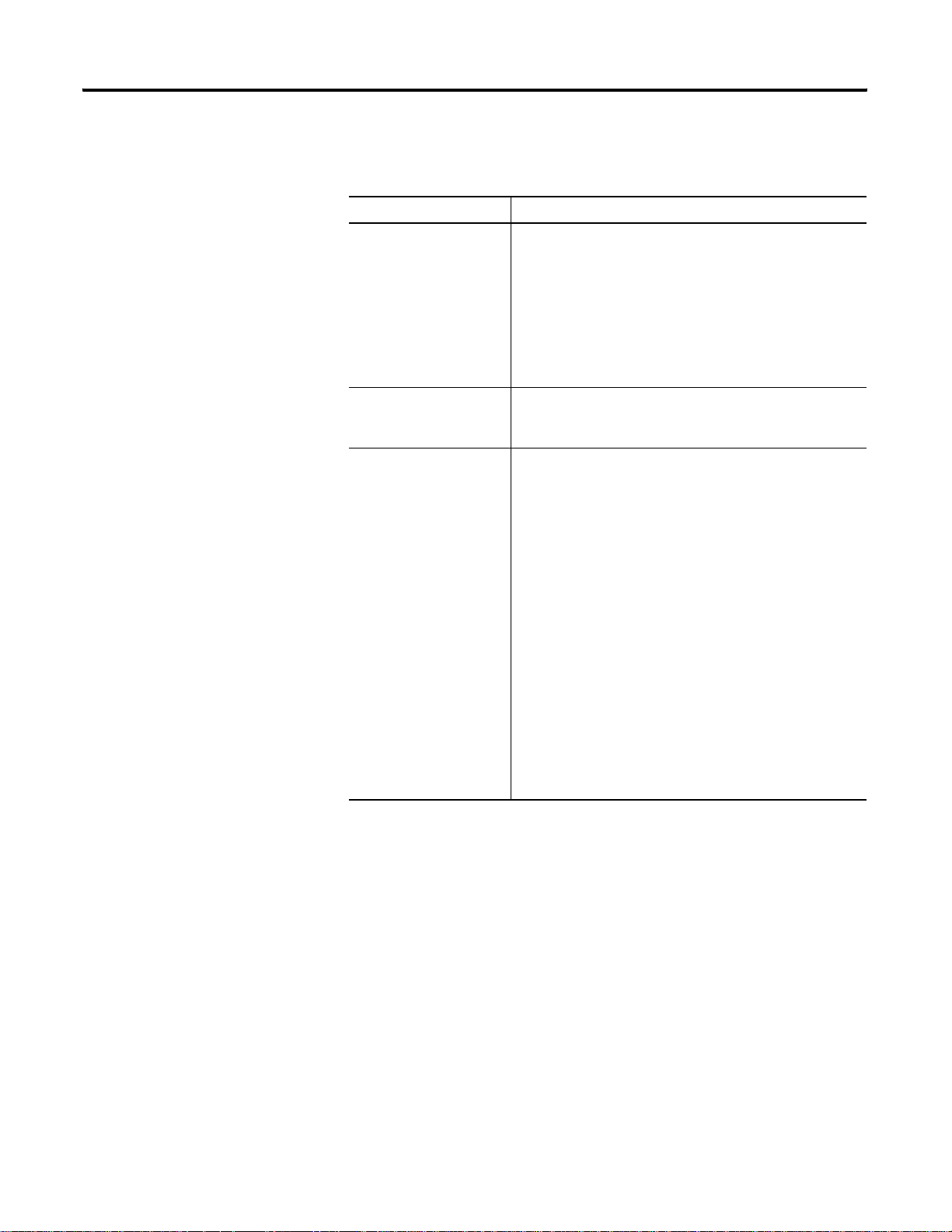
The following define the intended operation of the Encoder/Counter
module.
Term Definition
Lead Breakage Typically requires a shunt resistor (across the load) to detect
3 levels of current/input states -
• Open (Wire Off, Device = ?)
• Off (Wire OK, Device Off)
• On (Wire OK, Device On)
This method does not check the input against a time base,
only that the device wiring (current loop) is intact
Missing Pulse Typically uses an input pulse to reset a watc hdog timer (fixed
or programmable HW). This method does detect “Lead
Breakage”, since a broken wire will time-out the watchdog.
Zero Frequency Typically uses an input pulse to calculate an input frequency
and verify it is above an error threshold. This method does
detect Lead Breakage, since a broken wire will generate a
0Hz frequency.
Missing Pulse or Zero Frequency will also detect a customer
device stuck high or low, since the counter is monitoring for a
change in the input state. Currently, the Counter/Encoder
Modes do not have Zero Frequency Detection - the A & B
inputs are time independent, only looking for input edge
changes to increment/decrement the count value.
The Period/Rate and Continuous Rate modes do have Zero
Frequency Detection, since the Z input is monitored for Zero
Frequency in Firmware (A and B inputs are not used and not
monitored).
The Rate Measurement mode inherently has Zero Frequency
Detection, since no A pulses in any sample period are = 0Hz
(B and Z inputs are not used and not monitored).
Publication 1734-UM006B-EN-P - August 20 05
Page 10
Preface 4
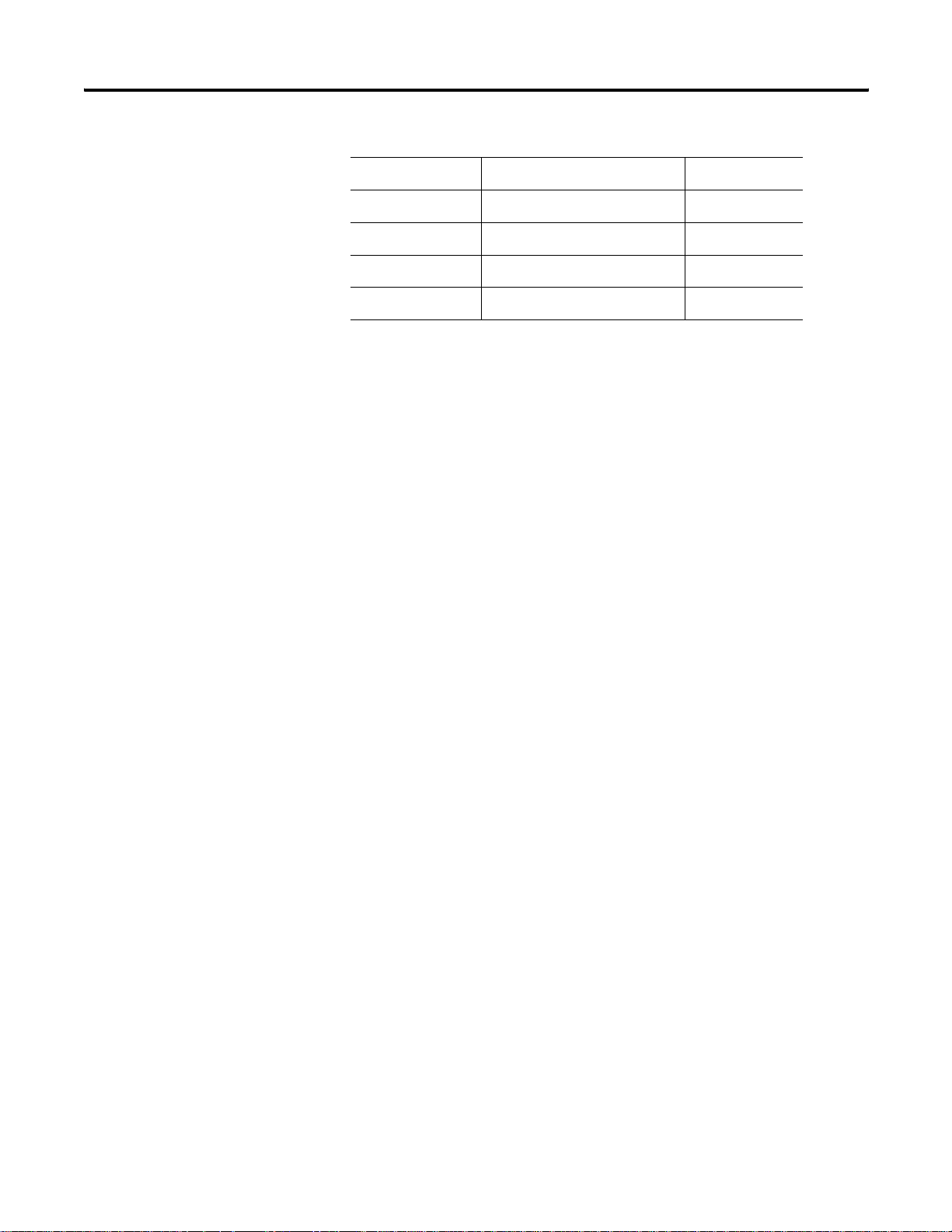
Operational Mode Zero Frequency Detection Input Monitored
Counter No None
Encoder No None
Period/Rate Yes Z Only
Rate Measurement Y A Only
Publication 1734-UM006B-EN-P - August 2005
Page 11

About the Modules
Chapter
1
What This Chapter Contains
Module Description and Features
Read this chapter to learn about types, features, and capabilities of
encoder/counter modules.
Encoder/counter modules install into the Point I/O terminal base
(1734-TB or 1734-TBS) and interface with the Point I/O DeviceNet
Pass-through (1734-PDN) or the Point I/O DeviceNet Adapter
(1734-ADN).
An encoder/counter module serves as a signal conditioner, function
block, and counter between the customer process signals on the
terminal base and the POINTBus containing the command
information. The main functional blocks are the the following.
• Customer digital I/O interface
• Counter ASIC
• Microprocessor
The encoder/counter module accepts feedback from the following.
• Encoders (either single-ended or differential)
• Pulse generators
• Mechanical limit switches
• Frequencies up to 1 MHz
A filter is available with the following settings.
• 50 Hz
• 500 Hz
• 5 kHz
• 50 kHz
Turn the filter off to achieve the fastest counting rate.
The input voltage range is 5V dc (1734-IJ) or 15-24V dc (1734-IK). The
module returns the count or frequency in the form of a 24 bit binary
number (0 - 16,777,215) expressed in a 32 bit long word.
Each counter has a user-selectable preset and rollover value
associated with it.
1 Publication 1734-UM006B-E N-P - August 2005
Page 12
1-2 About the Modules
Operating Modes
The encoder/counter modules operate in the modes shown in the
table.
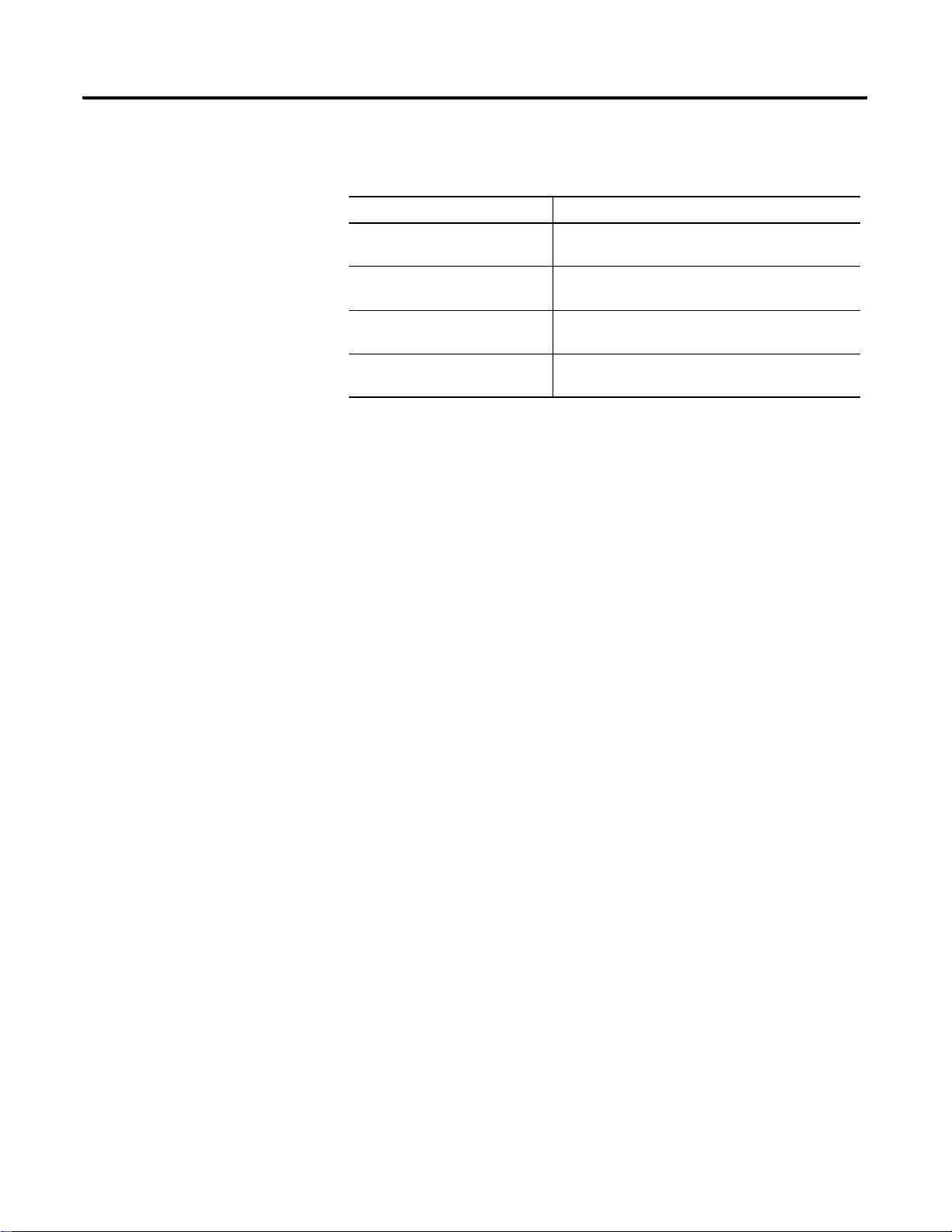
Mode Description
Counter Mode Read incoming single phase pulses, return a binary
count
Encoder Mode Read incoming 2 phase quadrature pulses, return a
binary count
Period/Rate Mode Count internal clocks during the On period, return a
frequency
Rate Measurement Mode Read pulses during the sample period, return a
frequency
The operation of the counter and encoder modes is nearly identical.
The difference between the two modes is in the type of feedback (1
phase versus 2 phase) for the count direction (up or down).
• In encoder mode, a transition is expected on B for counting to
proceed in a direction.
• In counter mode, the B input may be left at a static level.
Select operating modes by writing appropriate configuration data to
the module.
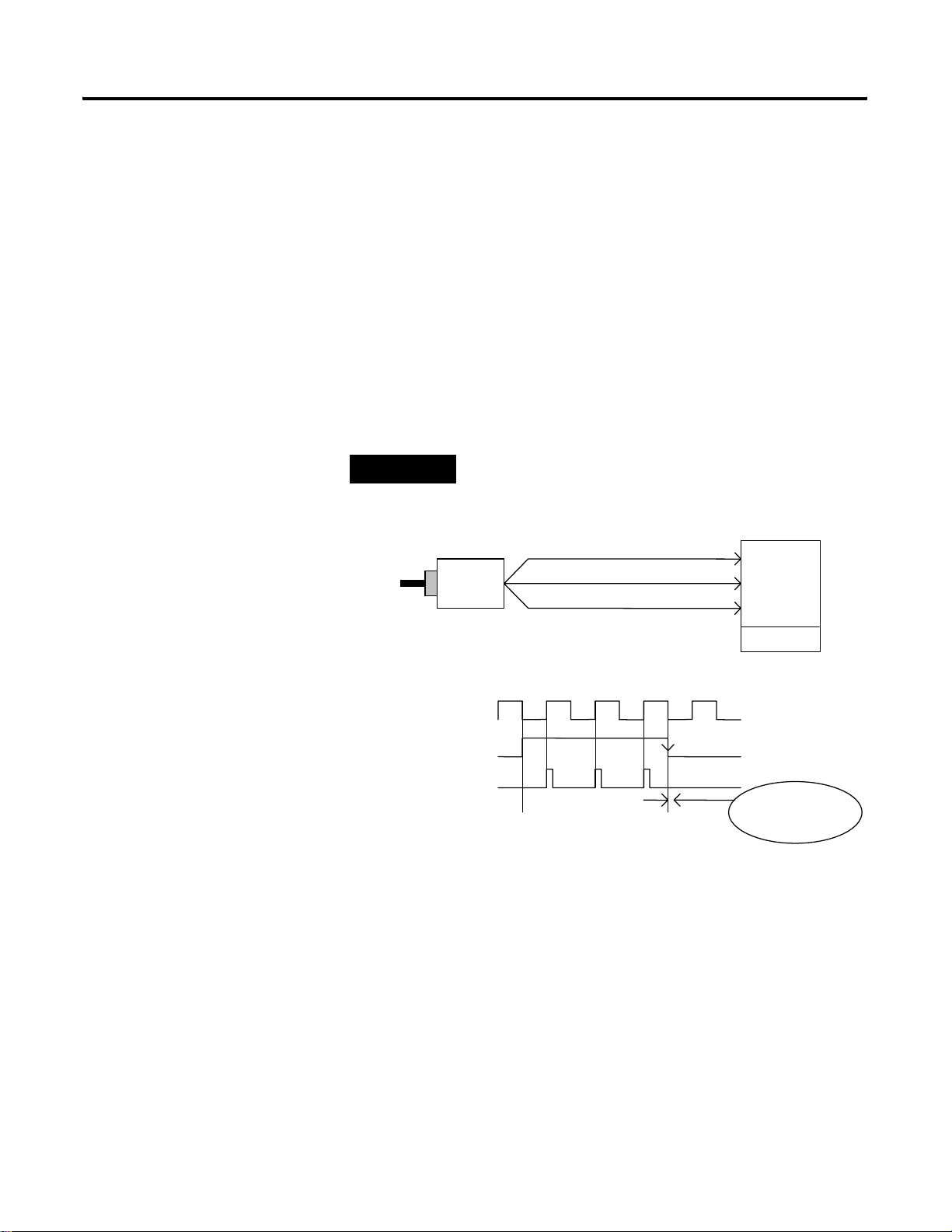
Counter Mode
The counter mode reads incoming pulses and returns a binary nu mber
(0 - 16,777,215
single phase inputs. The module determines the Phase B input state,
and counts up or down accordingly.
Channel A input is used as the counting pulse while chan nel B is used
to determine the direction.
[B = High, Count = Down; B = Low or floating (not connected), Count
= Up]
The Channel B input may be tied high or low for unidirectional
counting, or toggled for bidirectional counting.
) to the POINTBus. The counter mode only accepts
max
Publication 1734-UM006B-EN-P - August 2005
Page 13
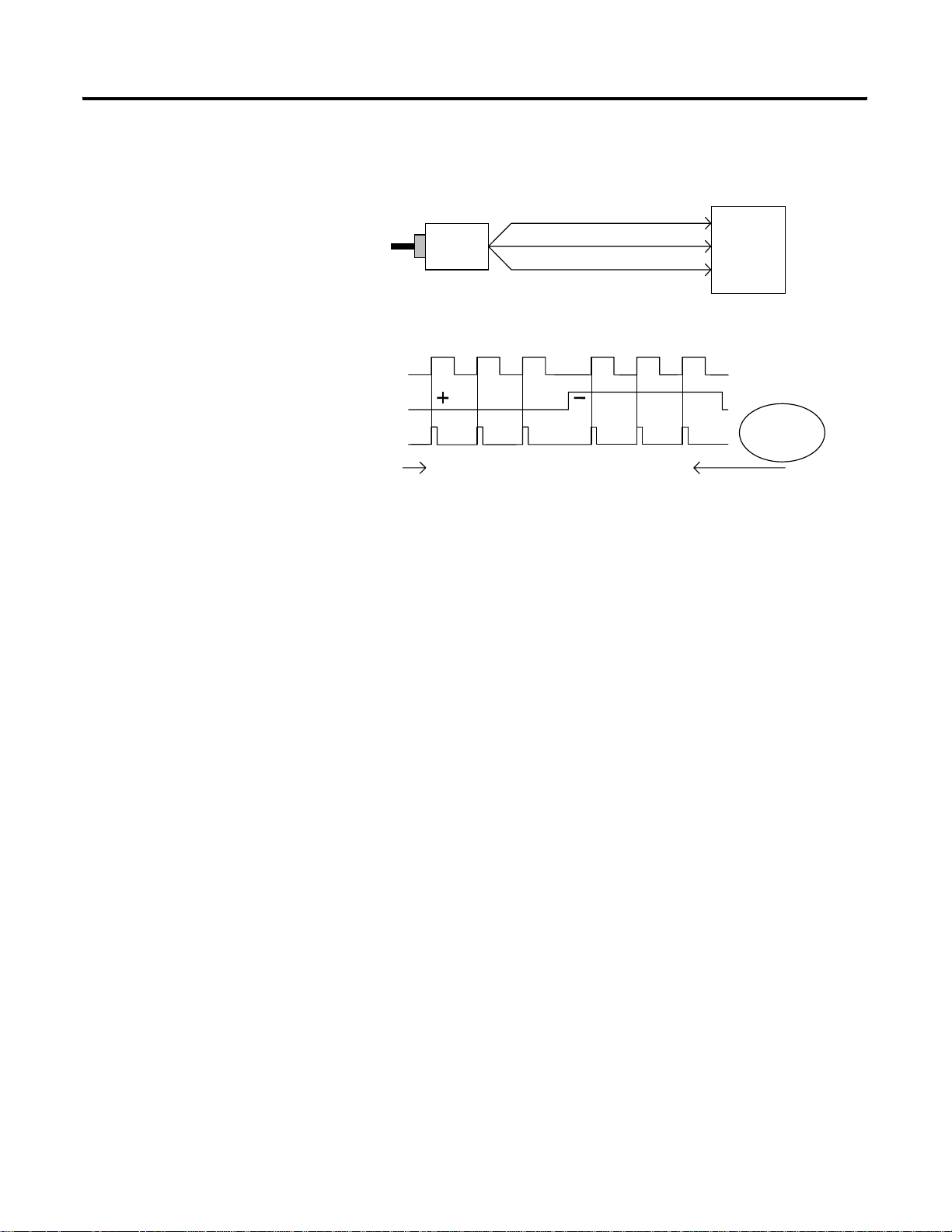
Example of Counter Mode
S
A
B
C
About the Modules 1-3
ingle Phase Pulse Generator
Count Up Count Down
Input
Input
ount
123
0
A Input
B Direction
Z (Store Count)
(Gate / Reset )
210
Input A
Input B
Input Z
1734-VHSC
Outputs
Updated
Continuously
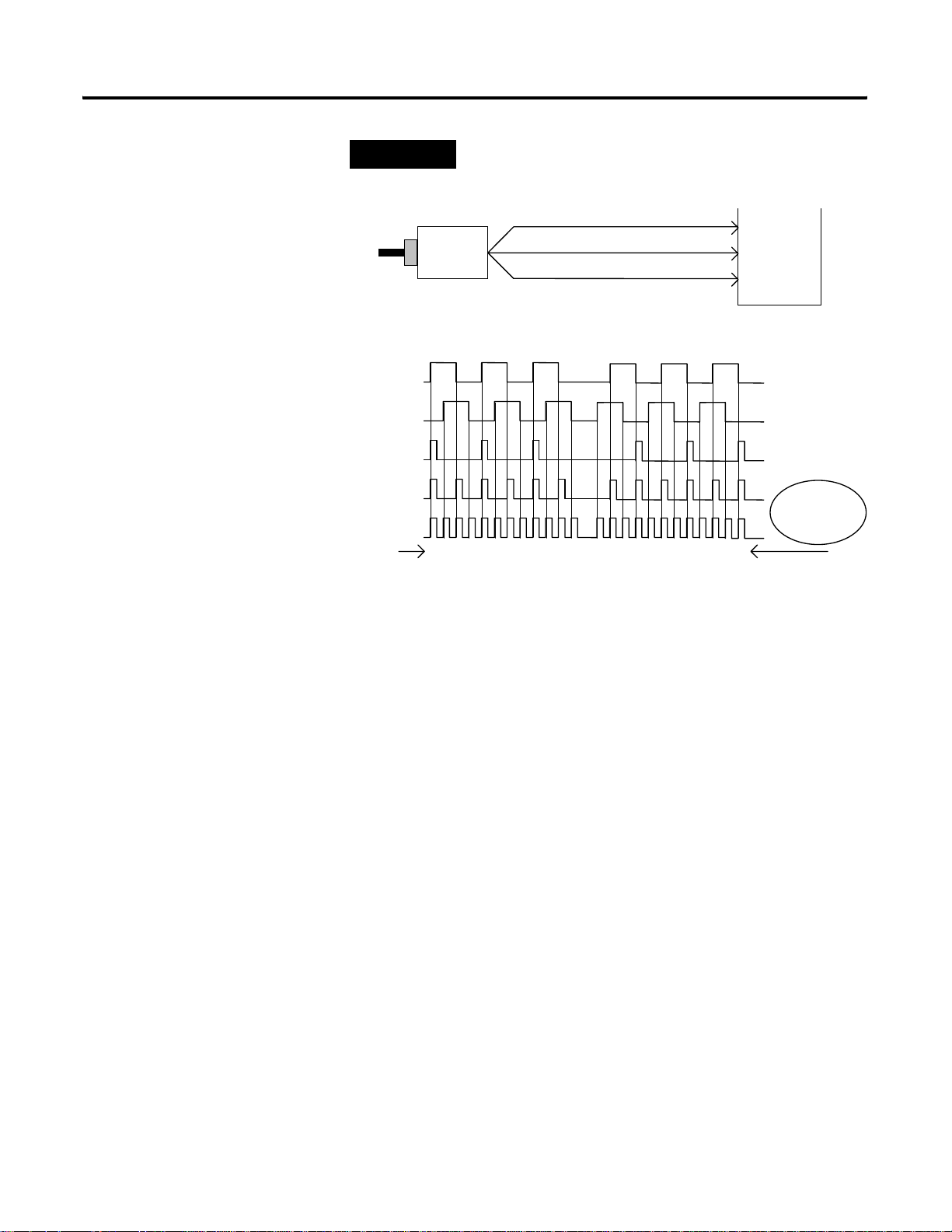
Encoder Mode
The encoder mode reads incoming pulses and returns a binary
number (0 - 16,777,215
only accepts 2 phase quadrature inputs. The module senses the
relationship between the 2 phases, and counts up or down
accordingly.
) to the POINTBus. The encoder mode
max
The two basic encoder types are absolute and incremental. A single
output incremental encoder is called a tachometer encoder. A dual
channel incremental encoder with one channel leading the other by
90° is called a quadrature encoder.
A system using a quadrature encoder may include an optional zero
pulse, or index, serving as a reference mark for system reset. The
principal disadvantage of a system using incremental en coders is that
a power interruption causes the loss of position reference, so a system
must be reinitialized or returned to a known zero position.
Absolute encoders typically have higher speed requi rements (200 KHz
typical) for motion control applications. An absolute encoder has a
unique code associated with each position, so the exact position is
always known, even if the system power is turned off.
Publication 1734-UM006B-E N-P - August 2005
Page 14
1-4 About the Modules
A
EXAMPLE
Example of Multiplying Encoder Mode X1
B
Input A
Input B
Z (Store Count)
Input Z
Quadrature Encoder
(Gate / Reset )
1734-VHSC
Forward Rotation Reverse Rotation
Input
Input
123
210
1 Count
Count
2
4 Count
135246
1352467 10981211
531420
11 9 710 8 6 5 23401
Outputs
Updated
Continuously
X1 Multiplying Encoder Mode
Quadrature input signals are used to count on the leading (up
direction) OR trailing (down direction) edge of A for a bidirectional
count, and channel B is used to determine the direction.
Publication 1734-UM006B-EN-P - August 2005
[ B = leads A, Count = Down; B = follows A, Count = Up ]
X2 Multiplying Encoder Mode
Quadrature input signals are used to count on leading AND trailing
edges of A for a bidirectional count, and channel B is used to
determine the direction.
[ B = leads A, Count = Down; B = follows A, Count = Up ]
X4 Multiplying Encoder Mode
Quadrature input signals are used to count on leading AND trailing
edges of A AND B for a bidirectional count, and channel B is used to
determine the direction.
[ B = leads A, Count = Down; B = follows A, Count = Up ]
Page 15
About the Modules 1-5
A
F
F
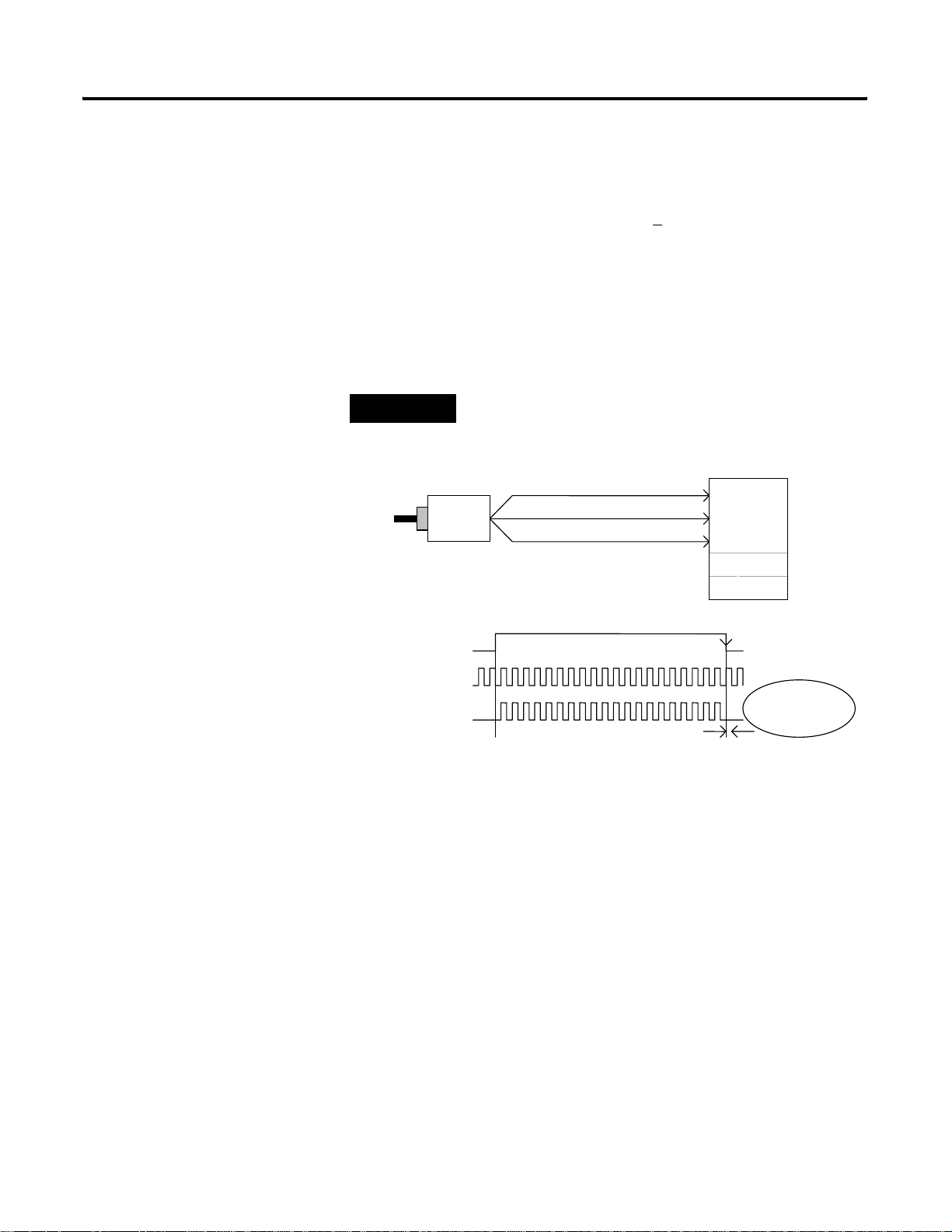
Period / Rate Mode
The Period/Rate Mode will return an incoming frequency and a total
accumulated count to the POINTBus, by g
internal clock with an external signal.
This mode determines the frequency and total number of input pulses
by counting the number of internal 5MHz clock pulses over a
user-specified number of input signal pulses. At the end of the
specified number of pulses, the module returns the frequency
(0 - 1 MHz).
EXAMPLE
Example of Period/Rate Mode
ating an internal 5MHz
A ( Not Used )
B ( Not Used )
Z
Encoder / Pulse Generator
Z Input ( Pulse )
5 MHz Internal
Sampling Clock
Accumulated Count
ssumes symmetrical pulse, 50% duty cycle, so Period = Sample Time On X 2 {On & Off}
requency = 1 / Period If Count = 20, Scalar = 1, and Clock Period = ( 1 / 5 MHz )
requency = 1 / [ ( 20 / 1 ) X ( 1 / 5 MHz ) X 2 ] = 125 kHz
1
(Gate / Reset )
10 20
Input A
Input B
Input Z
Scalar
5 MHz Clk
1734-IJ/IK
Frequency
Updated Here
As the frequency of the incoming pulse train at the Z (Gate/Reset)
terminal increases, the number of sampled pulses from the 5 MHz
clock decreases. Since accuracy is related to the number of pulses
received over the sample period, the accuracy decreases with
increasing frequencies at the Gate/Reset terminal. Refer to the
following Scaling table.
Publication 1734-UM006B-E N-P - August 2005
Page 16
1-6 About the Modules
Relationship Between Sampled Pulses and Input Frequency
Input Frequency at Z
Gate/Reset Terminal
2.5Hz 1M
5Hz 500k
10Hz 250k
20Hz 125k
50Hz 50k
100Hz 25k
200Hz 12.5k
500Hz 5k
1kHz 2.5k
2 Hz 1.25k
5kHz 500
10kHz 250
20kHz 125
50kHz 50
100kHz 25
Sample Pulses for 1/2 Cycle
of Z Gate/Reset Pulse
Scaling the input frequency through the use of a scalar can lessen the
decrease in accuracy. A scalar value of 1 returns an accurate input
frequency only if incoming input pulses have a 50% duty cycle.
Operation of Scalar
In the Period/Rate mode, the scalar lets the incoming pulse train at the
Z Gate/Reset pin be divided by a user-defined number. There is one
scalar value for each counter. Acceptable values for the scalar are 1,
2, 4, 8, 16, 32, 64, and 128. The default value for each scalar is 1.
Note that a “0” scalar is equivalent to a “1”.
The product of the Sample Period times the scalar should be less than
6.71 seconds in order to avoid a zero frequency detect indication.
(5 MHz sample time = 200ns;
16,777,216 counts x 200ns x 2 half cycles of Z = 6.71 seconds)
Publication 1734-UM006B-EN-P - August 2005
Page 17
About the Modules 1-7
Rate Measurement Mode
The Rate Measurement mode determines the frequency and total
number of input pulses over a user-specified sample period. At the
end of the interval, the module returns a value representing the
sampled number of pulses and a value indicating the incoming
frequency.
When the count and frequency update, any associated outputs are
checked against their associated presets. Frequency is calculated by
dividing the accumulated count by the user selected time period, and
is returned in the read data. Allowable time periods are 10ms to 3s in
10ms increments, with a default value of 1s. Note that a “0” time
period is equivalent to the 1s default.
EXAMPLE
Example of Rate Measurement Mode
A Input
B ( Not Used )
Z ( Not Used )
1
(Gate / Reset )
23
Encoder/Pulse Generator
A Input ( Pulse )
Internal Sampling Gate
Accumulated Count
User Selectable Sample Period,
10ms to 2s in 10ms increments.
If Sample Period is 50ms, and Count = 3, then Frequency = 3 /50ms = 60Hz
Input A
Input B
Input Z
Time Base
1734-IJ/IK
Frequency Calculated,
Updated Here
Publication 1734-UM006B-E N-P - August 2005
Page 18

1-8 About the Modules
New Data Indicator
A two-bit counter, C1 & C0, updates every time an "event" occurs,
indicating that new data is available in the Stored/Accumulated Count
words. Definitions for events are as follows.
• Any active gate transition in any of the Store Count (Counter or
Encoder) modes
• The end of the gate sample period in either the Period mode or
Rate mode
• The end of the programmed sample period in the Rate
Measurement mode.
To use these bits reliably, acquisition of data from the Counter Module
must occur faster than the events, which cause C1/C0 to increment.
When C1/C0 is updated, a Change Of State (COS) message can be
sent.
Default Configuration
The module's default configuration on startup is as follows.
• Counter Mode
• 50Hz filter on A, B and Z
• No time base
• Rollover = 0x00FFFFFF
• Preset = 0
• No scalar
• Counter Control Safe State = 0
To modify the default settings to those required for your application,
refer to the Input and Output section of this manual.
Publication 1734-UM006B-EN-P - August 2005
Page 19
About the Modules 1-9
R
a
Operating Mode Features
The following table summarizes which features are active in each
mode:
Operating Feature Counter
Up / Down
Preset Y Y N N
Rollover Y Y N N
Software Reset Y Y Y Y
Store Count - Z Gate / Reset 4 modes Y Y N N
Scale Input Count at Z Gate / Reset N N Y N
Z Gate / Reset Invert Bit Y Y Y N
Sample Period N N N Y
Encoder
X1, X2 & X4
Period
/Rate
Rate
Measurement
Operating Mode Features
The Z Gate/Reset Terminall will operate in one of four modes when
the Store Count feature is in use. The following figures detail the
operation in each mode:
• Store/Continue
• Store/Wait/Resume
• Store-Reset/Wait/Start
• Store-Reset/Start
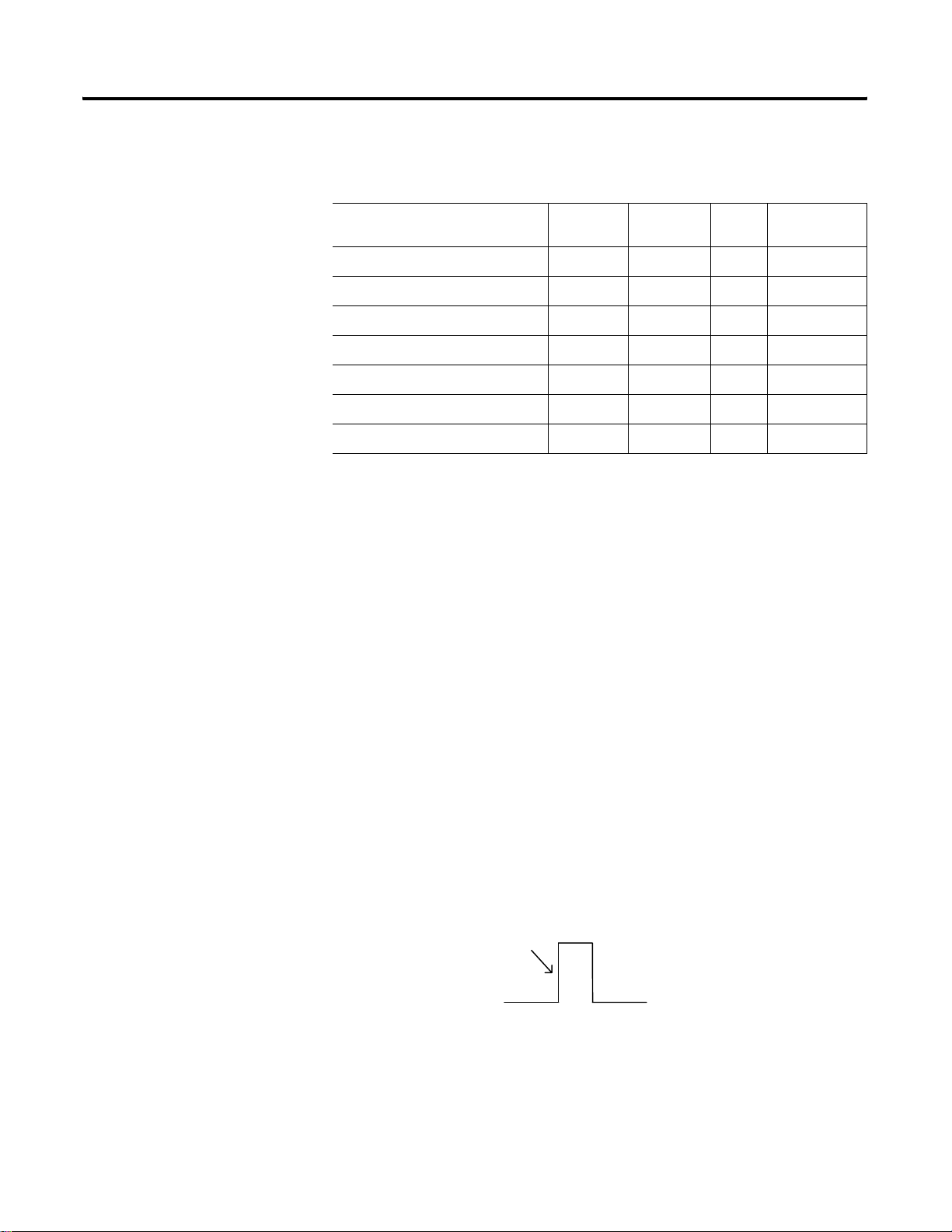
Store Count Mode 1: Store/Continue
In mode 1, the rising edge of a pulse input on the Z Gate/Reset
terminal causes the current counter value to be read and stored in the
Read Data file. The counter continues counting. The stored count is
available in the Stored/Accumulated Count word. The stored count
information remains until it is overwritten with new data.
Store/Continue
ead, Store Count,
nd Continue Counting
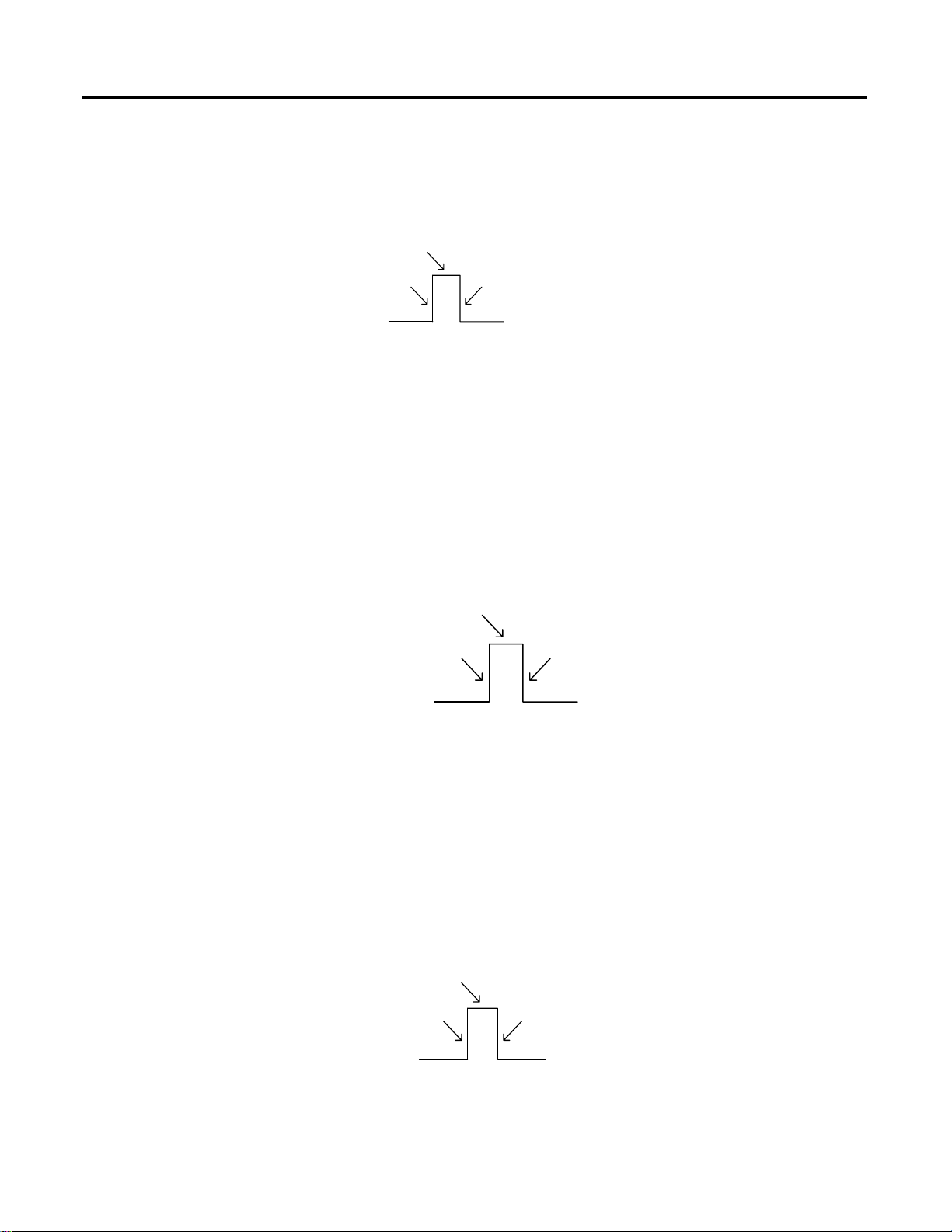
Store Count Mode 2: Store/Wait/Resume
In mode 2, the rising edge of a pulse input on the Z Gate/Reset
terminal reads and stores the current counter value in the
Stored/Accumulated Count word and inhibits counting while the Z
Publication 1734-UM006B-E N-P - August 2005
Page 20
1-10 About the Modules
S
ng
S
C
ng
a
ng
S
Gate/Reset terminal is high. Counting resumes on the falling edge of
the pulse at the Z Gate/Reset terminal. The stored count information
remains until it is overwritten with new data.
Store/Wait/Resume
top Counting
tore Count Resume Counti
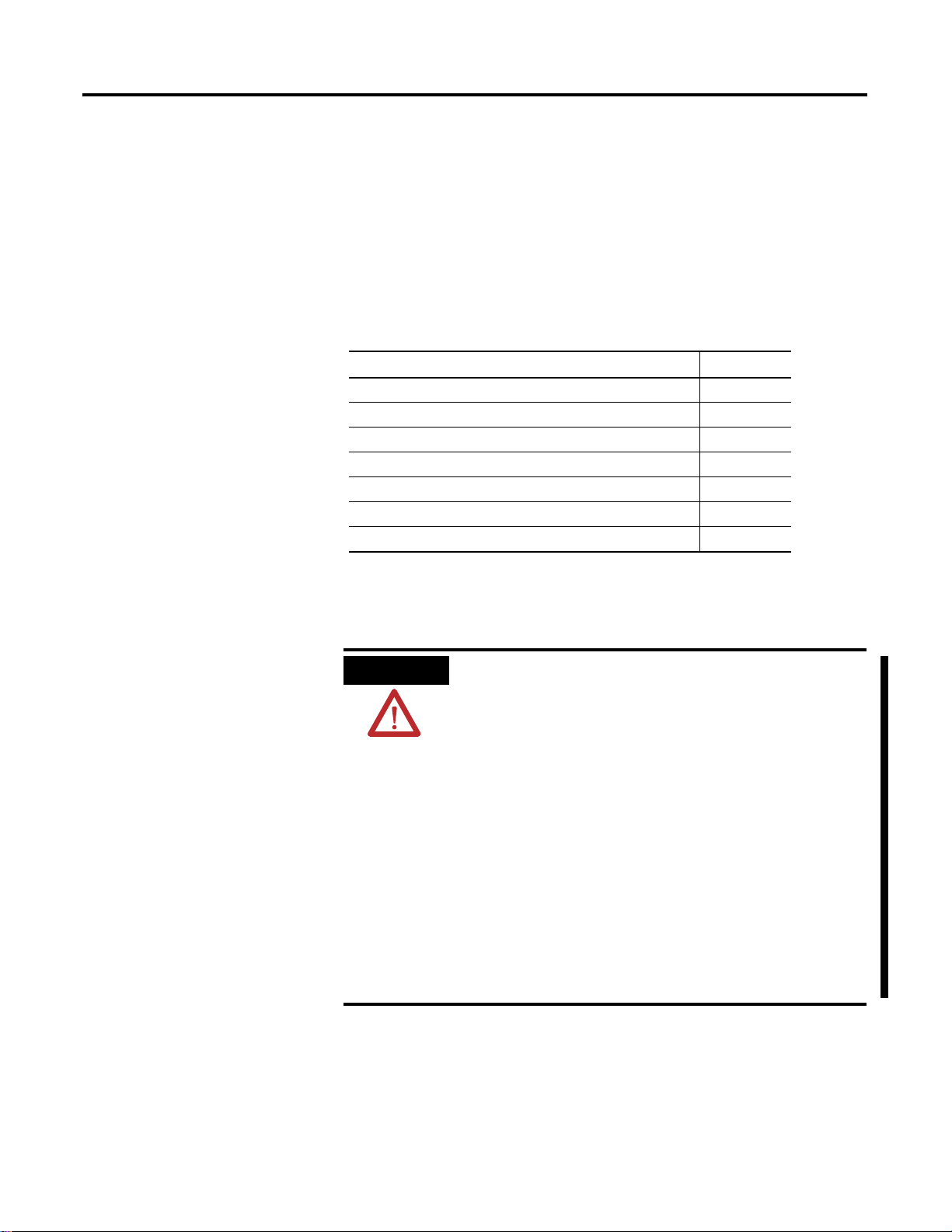
Store Count Mode 3: Store-Reset/Wait/Start
In mode 3, the rising edge of a pulse input on the Z Gate/Reset
terminal stops counting, reads, and stores the current counter value in
the Stored/Accumulated Count word, and re sets the counter to zero.
The counter does not count while the input pulse o n the Z Gate/Reset
terminal is high. Counting resumes from zero on the falling edge of
the pulse at the Gate/Reset terminal. The stored count information
will remain until it is overwritten with new data.
Store-Reset/Wait/Start
ounter has stopped Counting
Stop Count, Store,
and Reset to zero from zero
Start Counti
Store Count Mode 4: Store-Reset/Start
In mode 4, the rising edge of a pulse input on the Z Gate/Reset
terminal will store the current counter value in the
Stored/Accumulated Count word and reset th e counter to zero. The
counter will continue counting while the Z Gate/Reset terminal is
high. The stored count information will remain until it is overwritten
with new data.
Store-Reset/Start
Start Counting
tore Count,
nd Reset to zero
Continue Counti
Publication 1734-UM006B-EN-P - August 2005
Page 21
Install the Module
Chapter
2
What This Chapter Contains
Before You Begin
Read this chapter for information about how to install Encoder/
Counter modules.
For information about how to See page
Before You Begin 2-1
Install the Mounting Base and Wiring Base Assembly 2-1
Install the Module 2-4
Install the Removable Terminal Block 2-6
Remove a Mounting Base 2-6
Wire the Modules 2-7
Communicate with Your Module 2-9
ATTENTION
Preventing Electrostatic Discharge
This equipment is sensitive to electrostatic dischar ge,
which can cause internal damage and affect normal
operation. Follow these guidelines when you handle
this equipment:
• Touch a grounded object to discharge potential
static.
• Wear an approved grounding wriststrap.
• Do not touch connectors or pins on component
boards.
• Do not touch circuit components inside the
equipment.
• If available, use a static-safe workstation.
• When not in use, store the equipment in
appropriate static-safe packaging.
1 Publication 1734-UM006B-E N-P - August 2005
Page 22

2-2 Install the Module
ATTENTION
Environment and Enclosure
This equipment is intended for use in a Pollution
Degree 2 industrial environment, in overvoltage
Category II applications (as defined in IEC
publication 60664-1), at altitudes up to 2000 meters
without derating.
This equipment is considered Group 1, Class A
industrial equipment according to IEC/CISPR
Publication 11. Without appropriate precautions,
there may be potential difficulties ensuring
electromagnetic compatibility in other environments
due to conducted as well as radiated disturbance.
This equipment is supplied as open-type equipment.
It must be mounted within an enclosure that is
suitably designed for those specific environmental
conditions that will be present and appropriately
designed to prevent personal injury resulting from
accessibility to live parts. The interior of the
enclosure must be accessible only by the use of a
tool. Subsequent sections of this publication may
contain additional information regarding specific
enclosure type ratings that are required to comply
with certain product safety certifications.
See NEMA Standards publication 250 and IEC
publication 60529, as applicable, for explanations of
the degrees of protection provided by different types
of enclosure. Also, see the appropriate sections in
this publication, as well as the Allen-Bradley
publication 1770-4.1 (Industrial Automation Wiring
and Grounding Guidelines), for additional installation
requirements pertaining to this equipment.
Use these Series C modules with the following:
• ControlNet adapters
with RSLogix 5000 software, version 11 or higher
• DeviceNet adapters
• EtherNet/IP adapters
with RSLogix 5000 software, version 11 or higher
• PROFIBUS adapters
Publication 1734-UM006B-EN-P - August 2005
Page 23

Install the Module 2-3
N
Install the Mounting Base and Wiring Base Assembly
The wiring base assembly (1734-TB or 1734-TBS) consists of a
mounting base (cat. no. 1734-MB) and a removable terminal block
(catalog number 1734-RTB or 1734-RTBS).
You can install the assembly, or just the mounting base. T o install the
mounting base and wiring base assembly on the DIN rail, proceed as
follows.
ATTENTIO
POINT I/O is grounded through the DIN rail to chassis
ground. Use zinc-plated, yellow-chromated steel DIN
rail to assure proper grounding. The use of DIN rail
materials (such as aluminum and plastic) that can
corrode, oxidize, or are poor conductors can result in
improper or intermittent grounding.
Secure DIN rail to mounting surface approximately
every 200 mm (7.8 inches).
1. Position the mounting base and wiring base assembly vertically
above the installed units (adapter, power supply or existing
module).
2. Slide the mounting base down so that the interlocking side
pieces engage the adjacent module or adapter.
Module Locking Mechanism
Insertable I/O Module
Module Wiring Diagram
Interlocking Side Pieces
Module
Status
1
Network
Status
NODE:
24VDC
Mechanical Keying
(orange)
DIN Rail Locking Screw
Mounting Base
Source
Output
0
1
2
(orange)
3
Slide-in Writable Label
1734
OB4E
RTB Removing Handle
Removable Terminal Block (RTB)
41825
Publication 1734-UM006B-EN-P - August 20 05
Page 24

2-4 Install the Module
3. Press firmly to seat the mounting base on the DIN rail.
The mounting base snaps into place.
Module
Status
Network
Status
NODE:
24VDC
Source
Output
0
1
2
3
1734
OB4E
4. To remove the mounting base from the DIN rail:
a. Remove any installed module and any module immediately to
the right.
b. Use a small-bladed screwdriver to rotate the DIN rail locking
screw to a vertical position.
This releases the locking mechanism.
c. Lift straight up to remove the mounting base.
d. Repeat this procedure for the next mounting base assembly.
ATTENTION
Do not discard the end cap shipped with an adapter
or communication interface. Use this end cap to cover
the exposed interconnections on the last mounting
base on the DIN rail. Failure to do so could result in
equipment damage or injury from electric shock.
Publication 1734-UM006B-EN-P - August 2005
Page 25

Install the Module 2-5
Install the Module
Install the module before or after base installation. Ma ke sure that you
correctly key the mounting base before installin g the module into the
mounting base. In addition, make sure you position the mounting
base locking screw horizontal, as referenced to the base.
WARNING
When you insert or remove the module while
backplane power is on, an electrical arc can occur.
This could cause an explosion in hazardous location
installations.
Be sure that power is removed or the area is
nonhazardous before proceeding. Repeated electrical
arcing causes excessive wear to contacts on both the
module and its mating connector. Worn contacts may
create electrical resistance that can affect module
operation.
1. Using a bladed screwdriver, rotate the keyswitch on the
mounting base clockwise until the number required for the type
of module you are installing aligns with the notch in the base.
1734-IJ - Position 2
1734-IK - Position 2
Turn the keyswitch to align
the number with the notch.
Notch
(position 3 shown)
44009
2. Make sure the DIN rail locking screw is in the horizontal
position.
You cannot insert the module if you unlock the locking
mechanism.
Make sure the DIN rail
locking screw is in the
horizontal position.
44010
3. Insert the module straight down into the mounting base,
and press to secure.
Publication 1734-UM006B-EN-P - August 20 05
Page 26

2-6 Install the Module
The module locks into place.
Module
Status
Network
Status
NODE:
24VDC
Source
Output
0
1
2
3
1734
OB4E
44012
Install the Removable Terminal Block
A removable terminal block comes with your mounting base
assembly. Pull up on the RTB handle to remove, and replace as
necessary without removing any of the wiring. To reinsert the
removable terminal block, proceed as follows.
1. Insert the RTB end opposite the handle into the base unit.
This end has a curved section that engages with the mounting
base.
Hook the RTB end into
the mounting base end,
and rotate until it locks
into place.
44011
2. Rotate the terminal block into the mounting base until it locks
itself in place.
Publication 1734-UM006B-EN-P - August 2005
Page 27

Install the Module 2-7
3. If an I/O module is installed, snap the RTB handle into place on
the module.
Remove a Mounting Base
WARNING
To remove a mounting base, remove any installed module and the
removable terminal block (if wired).
1. Unlatch the RTB handle on the I/O module.
2. Pull on the RTB handle to remove the removable terminal block.
WARNING
When you connect or disconnect the removable
terminal block (RTB) with field-side power applied,
an electrical arc can occur. This could cause an
explosion in hazardous location installations. Be
sure that power is removed or the area is
nonhazardous before proceeding.
When you connect or disconnect the removable
terminal block (RTB) with field-side power applied,
an electrical arc can occur. This could cause an
explosion in hazardous location installations.
Be sure that power is removed or the area is
nonhazardous before proceeding.
Wire the Modules
3. Press in on the module lock on the top of the module and pull
up on the I/O module to remove from the base.
4. Remove the module to the right of the base you are removin g .
The interlocking portion of the base sits under the adjacent
module.
5. Use a small-bladed screwdriver to rotate the orange DIN rail
locking screw on the mounting base to a vertical position.
This releases the locking mechanism.
6. Lift the mounting base straight up to remove.
WARNING
If you connect or disconnect wiring while the field-side
power is on, an electrical arc can occur. This could
cause an explosion in hazardous location installations.
Be sure that power is removed or the area is
nonhazardous before proceeding.
Publication 1734-UM006B-EN-P - August 20 05
Page 28

2-8 Install the Module
Module Status
Network
Status of Input A
Status of Input B
Status of Input Z
Input A
Input A
ret
Input B
Input Z
Chassis
Ground
1
0
A
Aret
23
B
Bret
45
Z
Zret
7
6
Chas
Chas
Gnd
Gnd
Input Bret
Input Zret
Chassis
Ground
A, B, and Z , and Aret, Bret,
and Zret are inputs
Chas Gnd = Chassis ground
Termination Definition
0A
1Aret
2B
42016
Publication 1734-UM006B-EN-P - August 2005
3Bret
4Z
5Zret
6 Chassis ground
7 Chassis ground
Page 29

Install the Module 2-9
Communicate with Your Module
POINT I/O modules send (consume) and receive (produce) I/O
messages. You map these messages into the processor’s memory.
This module produces 6 or 10 bytes of input data (scanner Rx)
(status). It consumes 1 byte of I/O data (scanner Tx). Use parameters
11 and 12 to select assembly 101, 102, or 103 for data produced by the
module.
When you send a configuration to the module, you check it for
consistency before applying it. Monitor the PE bit with your user
program to isolate any problems with an improper ly configured
module. If the configuration is acceptable, the counter ASIC is
disabled while the ASIC is loaded with new operational parameters.
Outputs can turn off during this reconfiguration .
Default Data Map
Message size: 6 or 10 Bytes
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
Produces
(scanner Rx)
PEEFNR000000ZSBSASC1C0ZD0
Channel 0 value of present counter state (LSW)
Channel 0 value of present counter state (MSW)
Where:PE = Programming error
EF = EEPROM fault status
NR = Not ready status bit
ZS = Z input status
BS = B input status
AS = A input status
C1/C0 = Stored data count
ZD = Zero frequency detected
LSW = Least significant word
MSW= Most significant word
Message size:
07 06 05 04 03 02 01 00
Consumes (scanner Tx)00000VRCPCR
Where:VR = Value reset of stored/accumulated count
CP = Counter preset
CR = Counter reset
Publication 1734-UM006B-EN-P - August 20 05
Page 30

2-10 Install the Module
Module Configuration
Parameter Set/Get Description Bytes
1 Set/Get Counter Configuration 1
2 Set/Get Filter Selection 1
3 Set/Get Decimal Position 1
4 Set/Get Reserved 1
5 Set/Get Time Base Value 2
6 Set/Get Gate Interval 1
7 Set/Get Channel Scalar 1
8 Set/Get Channel Rollover Value 4
9 Set/Get Channel Preset Value 4
10 Set/Get Counter Control Safe State 1
11 Set/Get Requested Poll Produce Assembly 1
12 Set/Get Requested Change of State Produce Assembly 1
Counter Configuration
07 06 05 04 03 02 01 00
ZI MD CF Counter 0
0 0 0 0 Counter
0 0 0 1 Encoder X1
0 0 1 0 Encoder X2
0 0 1 1 Not used
0 1 0 0 Encoder X4
0 1 0 1 Period/Rate
0 1 1 0 Not used
0 1 1 1 Rate Measurement
0 0 0 Store Count Disabled
0 0 1 Mode 1 - store-continue
0 1 0 Mode 2 - store-wait-resume
0 1 1 Mode 3 - store, reset-wait-start
1 0 0 Mode 4 - store, reset-start
101 Reserved
110 Reserved
111 Reserved
0 Z input - 0 = not inverted
1 Z input - 1 = inverted
Publication 1734-UM006B-EN-P - August 2005
Page 31

Filter Selection
07 06 05 04 03 02 01 00
0ZFBFAF FS
0000No Filter
000150kHz (10µs + 0µs/-1.6µs)
0 0 1 0 5kHz (100µs + 0µs/-13.2µs)
0 1 0 0 500Hz (1.0ms + 0µs/-125µs)
1 0 0 0 50Hz (10ms + 0ms/-1.25ms)
0 A input not filtered
1 A input filtered
0 B input not filtered
1 B input filtered
0 Z input not filtered
1 Z input filtered
Install the Module 2-11
Assumes a 50% duty cycle signal.
Scalar Selection
07 06 05 04 03 02 01 00
00000001Z - F
00000 010Z/2 - F
00000100Z/4 - F
00001000Z/8 - F
00010000Z/16 - F
0010 0000Z/32 - F
01000000Z/64 - F
10000000Z/128 - F
1Where F
indicates the frequency at which the zero frequency detect is asserted
min
due to counter overflow.
Scalar
min
min
min
min
1
= 0.149Hz
= 0.298Hz
= 0.596Hz
= 1.192Hz
= 2.384Hz
min
= 4.768Hz
min
= 9.537Hz
min
= 19.073Hz
min
Publication 1734-UM006B-EN-P - August 20 05
Page 32

2-12 Install the Module
Assemblies
The Encoder and Counter Module uses several words to communicate real-time
input and output data as well as non-real-time module information (for example,
description, revision, etc.) and configuration. This shows the words that you can
exchange. You can read (get) or write (set) data using an Explicit Message.
Instance Services Field Bytes
#101 (0x65) Get Present Channel Data 4
Status 2
#102 (0x66) Get Stored Channel Data 4
Status 2
#103 (0x67) Get Present Channel Data 4
Stored Channel Data 4
Status 2
#104 (0x68) Get Programming Error Code 2
#105 (0x69) Set/Get Counter Control 1
#106 (0x6a) Set/Get Counter Configu ration 1
Filter Selection 1
Decimal Position 1
Reserved 1
Time Base 2
Gate Interval 1
Scalar 1
Rollover Value 4
Preset Value 4
Counter Control SSV 1
#123 (0x7b) Set/Get Counter Configu ration 1
Filter Selection 1
Decimal Position 1
Reserved 1
Time Base 2
Gate Interval 1
Scalar 1
Rollover Value 4
Preset Value 4
Counter Control SSV 1
Alignment (reserved = 0) 1
Publication 1734-UM006B-EN-P - August 2005
Page 33

Input and Output Data
Chapter
3
That This Chapter Contains
Data Table
Input Information
Present Channel Data 32-bit Value of the present counter state
Stored Channel Data 32-bit value of the stored /accumulated count
Read this chapter to learn about the input/output data table of your
1734-IJ and 1734-IK.
For more information about: See page:
Data Table 3-1
Detailed Description of Data Table Information 3-2
Configuration Data 3-4
Communicate Real Time/Nonreal Time Information 3-8
See the table for a complete format of the input/output data..
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 0
Status PEEFNR000 000ZSBSASC1C0ZD0
Programming Error Code PE0000E10E9E8E7E6E5E4E3E2E1E0
Output Information
Counter Control 00000VRCPCR
Configuration Information
Counter Configuration ZI MD MD MD CF CF CF CF
Filter Selection 0 ZF BF AF FS FS FS FS
Decimal Position 8-bit value used to modify the present channel data display
Reserved
Time Base 16-bit value used to set the time base
Gate Interval 8-bit value used to set the gate interval
Scalar
Rollover Value 32-bit value at which the counter is commanded to rollover
Preset Value 32-bit value the counter is to be set to when CP is asserted
Counter Control SS Value 00000VRCPCR
1 Publication 1734-UM006B-E N-P - August 2005
8-bit value used to divide the Z input by 2
n
Page 34

3-2 Input and Output Data
Detailed Description of Data Table Information
Present Channel Data (Input Word 1)
This is a 32 bit unsigned long word value representing the current
count of the 24 bit counter (configurations: count [0], x1 encoder [1],
x2 encoder [2], x4 encoder [4]) or the frequency (configurations:
period/rate [5], rate measurement [7]). The range of values is 0 ≤ value
≤ 0x00FFFFFF (16,777,215).
Stored/Accumulated Channel Data (Input Word 2)
This is a 32 bit unsigned long word value representing the stored
count of the counter at the time of some specified event. In counter
configurations (configurations: count [0], x1 encoder [1], x2 encoder
[2], x4 encoder [4]) without store modes selected, these words are not
updated. With store modes selected, they are the stored value of the
counter at the time of the specified event (ex: rising edge of Z input).
In period/rate [5] configurations, it is the total accumulation of
unscaled Z pulses (for example, if scaling is set to 128, after 128 Z
pulses the accumulator will increase by 128 counts).
The maximum frequency that accumulation can follow in period/rate
mode is 200Hz x scalar value (ex: 200Hz x 128 is 25kHz). Finally, in
rate measurement [7] configuration, it is the total number of pulses
seen at the A input accumulated over each period as specified by the
product of the time base x gate interval. The range of values occupies
the entire 32 bit size from 0 ≤ value ≤ 0xFFFFFFFF (4,294,967,295).
Changing the configuration does not clear these words.
Publication 1734-UM006B-EN-P - August 2005
Module/Channel Status and Programming Error Codes (Input
Words 3 and 4)
Programming Error bit (PE) - If an incomplete, incorrect or
conflicting set of configuration parameters are sent to the module, the
PE bit will be asserted and an error code will be placed in the
Programming Error Code word (assembly 68
enter a normal operational state.
). The module will not
16
Page 35

Input and Output Data 3-3
Bit definitions for the error code are:
E10: Reserved
E9: The decimal point position is outside of acceptable range.
E8: Reserved
E7: Reserved
E6: A configuration was selected that requires the scalar and none
was programmed OR Multiple scalars were selected.
E5: The preset is out of range ( > 0x00FFFFFF).
E4: A rollover of zero was programmed OR Rollover is out of
range ( > 0x01000000).
E3: A configuration requiring time base was selected and no gate
interval was set OR Gate interval is out of range ( > 200) OR
Product of time base and gate interval is greater than 3
seconds.
E2: A time base was entered that is not a multiple of 10 OR Time
base is out of range ( > 3000, or 3 seconds).
E1: ZF/BF/AF were selected and no filter was programmed OR
Multiple filters were selected.
E0: A reserved configuration/mode was programmed.
EEPROM Fault status bit (EF) - If a fault is detected with the
EEPROM during power up tests, this bit is asserted to 1. It indicates
that the content of the EEPROM has been corrupted, most likely
caused by loss of power during an executing write.
Not Ready status bit (NR) - Whenever power is applied to the
module, the hardware must be initialized. During this time, the NR bit
will be asserted and the green module status indicator will flash.
Z input Status (ZS) - This bit indicates the present status of the Z
input (1 indicates Z is ON, 0 indicates Z is OFF). This bit is unaffected
by Z Invert, ZI, in the Counter Configuration word.
B input Status (BS) - This bit indicates the present status of the B
input (1 indicates B is ON, 0 indicates B is OFF).
A input Status (AS) - This bit indicates the present status of the A
input (1 indicates A is ON, 0 indicates A is OFF).
C[1,0] Stored data count - This count cycles through [ 0 0 ], [ 0 1 ], [ 1
0 ], [ 1 1 ], [ 0 0 ]… Each time the stored/accumulated count words are
updated, C[1,0] is incremented. This featu re assumes the host’s sample
rate (including network delay and program scan) is as fast or faster
than the frequency of the event that updates C[1,0].
Publication 1734-UM006B-E N-P - August 2005
Page 36

3-4 Input and Output Data
Zero frequency Detected (ZD) - This bit is operational when
frequency configurations are programmed (configurations: period/rate
[5], rate measurement [7]).
In period/rate [5] configuration, counts are acquired during
the ON state of the Z input. At very low frequencies the counter
saturates, indicating a ze ro frequency detect. The time it takes to
determine a zero frequency in these two configurations can be
as long as 6.7 seconds ( 16,777,216 counts x 1/5MHz x 2 half
cycles of Z ).
In rate measurement [7] configuration pulses on the A input
are counted over a sample interval specified by the time base.
The time it takes to determine a zero frequency in this
configuration will be determined by the sample interval, for
example, time base = 0.300 second (300 milliseconds) to
determine ZF.
Configuration Data
The following represents the configuration data used by the mo du le.
Parameter Configuration Information Size (bytes)
1 Set/Get Counter Configuration 1
2 Set/Get Filter Selection 1
3 Set/Get Decimal Position 1
4 Set/Get Reserved 1
5 Set/Get Time Base 2
6 Set/Get Gate Interval 1
7 Set/Get Scalar 1
8 Set/Get Rollover Value 4
9 Set/Get Preset Value 4
10 Set/Get Counter Control SS Value 1
Publication 1734-UM006B-EN-P - August 2005
Page 37

Counter Configuration (Configuration Word 1)
Use this byte to select the type of counter desired.
07 06 05 04 03 02 01 00
ZI MD CF Counter 0
0000Counter
0001Encoder X1
0010Encoder X2
0011Reserved
0100Encoder X4
0101Period/Rate
0110Reserved
0111Rate Measurement
0 0 0 Store Count Disabled
0 0 1 Mode 1 - store/continue
0 1 0 Mode 2 - store/wait/resume
0 1 1 Mode 3 - store, reset/wait/start
1 0 0 Mode 4 - store, reset/start
101 Reserved
110 Reserved
111 Reserved
0 Z input - 0 = not inverted
1 Z input - 1 = inverted
Input and Output Data 3-5
Filter Selection (Configuration Word 2
This byte sets the A/B/Z input filters
Filter Selection
07 06 05 04 03 02 01 00
0ZFBFAF FS
0000No Filter
000150kHz (10µs + 0µs/-1.6µs)
00105kHz (100µs + 0µs/-13.2µs)
0100500Hz (1.0ms + 0µs/-125µs)
100050Hz (10ms + 0ms/-1.25ms)
0 A input not filtered
1 A input filtered
0 B input not filtered
1 B input filtered
0 Z input not filtered
1 Z input filtered
Publication 1734-UM006B-E N-P - August 2005
Page 38

3-6 Input and Output Data
Decimal Position (Configuration Word 3)
This byte changes the significant digits of the frequency or counter
display.
In the frequency modes (period/rate [5], rate measurement [7]) for
example, a -2 will move the decimal point left 2 places, dividing the
frequency value by 100, a +1 moves it right, multiplying by 10. The
firmware checks for placement to be in the range -4 ≤ value ≤ +2. A
value outside the range will move the decimal point to the zero
position and assert the programming error (PE) bit. Moving the
decimal point to the left (negative), allows high frequencies,
commonly present in rate measurement mode, to fit within a single 16
bit word. Moving the decimal point to the right (positive), allows low
frequencies, commonly present in period and continuous rate modes,
to have resolution displayed to 0.1Hz and 0.01 Hz. Frequencies sho uld
be kept below 3.2kHz for 0.1Hz resolution and below 320Hz for
0.01Hz. Scalars of Z/128, Z/64, Z/32 and Z/16 should not be used
when positioning is applied. 0 is the default setting.
In the counter modes (counter [0], x1 encoder [1], x2 encoder [2], x4
encoder [4]), it attenuates the counter display, for example, 20 divides
count+1 by 20. The value may be in the range 0 < value ≤ 255. The
result of requesting a number other than 1 performs the function:
(COUNT + 1)/ATTENUATION. This is useful for scaling a large
counter value to a smaller 16 bit value or a percentage. One is the
default setting and zero reverts to 1 to prevent a divide by zero.
Word 4 is reserved.
Ti me Base and Gate Interval (Configuration Words 5 and 6)
The gate interval byte sets the counter’s gate intervall using the time
base setting (16-bit word 5) as its time unit . (its resolution is
determined by the time base). The actual gate interval is the product
of the time base and the gate interval (ex: 50ms gate interval may be
produced with a time base of 10 and a gate interval of 5 or a time
base of 50 and a gate interval of 1). The maximum value of the
product of time base x gate interval is 3 seconds. The gate interval
must be entered when rate measurement [7] configurations are used.
The maximum value is 200.
Publication 1734-UM006B-EN-P - August 2005
Page 39

Input and Output Data 3-7
Scalar (Configuration Word 7)
This bytel scales the Z signal in the period/rate [5] configuration. If the
filter is applied, then the filtered Z is scaled. Only one bit of the scalar
should be set. Selecting a scalar will cause accumulated counts to be
adjusted accordingly (selecting a scalar of 128 will increase the
accumulated count by 128 after 128 Z pulses have been received). We
highly recommend that anytime Z is scaled (divide by 2, 4, 8), the Z
input should be filtered, otherwise, noise could cause erroneous
frequency readings.
Scalar Selection
07 06 05 04 03 02 01 00
00000001Z - F
00000 010Z/2 - F
00000100Z/4 - F
00001000Z/8 - F
00010000Z/16 - F
0010 0000Z/32 - F
01000000Z/64 - F
10000000Z/128 - F
1Where F
indicates the frequency at which the zero frequency detect is asserted
min
due to counter overflow.
Scalar
min
1
= 0.149Hz
= 0.298Hz
min
= 0.596Hz
min
= 1.192Hz
min
= 2.384Hz
min
= 4.768Hz
min
= 9.537Hz
min
= 19.073Hz
min
Rollover (Configuration Word 8)
This long word sets the number of counts the counter will
accumulate before rolling over. For example, a value of 1000 will
produce a count sequence of: 998, 999, 0, 1, 2… while incrementing
or 2, 1, 0, 999, 998… while decrementing. Rollover is a 32 bit number
with a useable range of 1 ≤ value ≤ 0x01000000 (16,777,216). In count
[0], x1 encoder [1], x2 encoder [2] and x4 encoder [4] configurations, it
should be specified to some non-zero value; and in period/rate [5],
and rate measurement [7] configurations is a ‘don’t care’.
Preset (Configuration Word 9)
This long word sets the preset value the counter will be loaded with,
when a Counter Preset, CP, command is issued. Preset is a 32 bit
number with a range of 0 ≤ value ≤ 0x00FFFFFF (16,777,215).
Publication 1734-UM006B-E N-P - August 2005
Page 40

3-8 Input and Output Data
Safe State Values (Configuration Word 10)
When either the host transitions to PROGRAM mode or a
communication fault (broken network cable) occurs, the module
copies the safe state word (counter control value) into its real-time
working buffer. The definitions are identical to those described under
Real-time Output Data.
Communicate Real Time/Nonreal Time Information
The Encoder/Counter Module uses several words to communicate real
time input and output data as well as non-real time module
information (such as description and revision) and configuration.
Assembly 101 is produced for a polled connection. Assembly 102 is
produced for a Change Of State (COS) connection. Assemblies 103,
104, and 106 are by Explicit message only . Assembly 105 is co nsumed
in a polled connection.
Data may be read (get) or written (set) using an Explicit Message. For
example, to read the Present Channel Data, assembly 101
(6516) can
10
be requested. The following table shows the words which can be
exchanged.
Instances Services Field Bytes
#101 (0x65) Get Present Channel Data 4
Status 2
#102 (0x66) Get Stored Channel Data 4
Status 2
#103 (0x67) Get Present Channel Data 4
Stored Channel Data 4
Status 2
#104 (0x68) Get Programming Error Code 2
#105 (0x69) Set/Get Counter Control 1
#106 (0x6a) Set/Get Counter Configuration 1
Filter Selection 1
Decimal Position 1
Reserved 1
Time Base 2
Gate Interval 1
Scalar 1
Rollover Value 4
Preset Value 4
Counter Control SSV 1
Publication 1734-UM006B-EN-P - August 2005
Page 41

Configure Your Module
Chapter
4
What This Chapter Contains
Configuration Overview
This chapter describes how to configure your Encoder/Counter
modules with RSNetworx.
For more information about: See page:
Configuration Overview 4-1
Add the Adapter to Your Network 4-1
Add I/O Modules to Your Network 4-2
Set Counter Parameters 4-4
Check I/O Status and View the EDS File 4-6
You must use the RSNetworx for DeviceNet software to configure
your module. You can configure the module while it is:
• online
or
• offline
This chapter shows configuration in the online mode. Configuration
dialogs appear similar in both modes. The primary difference is that if
you make changes offline, you must go on line before the
configuration changes take effect.
Add the Adapter to Your Network
Follow these steps:
1. Start the RSNetworx for DeviceNet software.
1 Publication 1734-UM006B-E N-P - August 2005
Page 42

4-2 Configure Your Module
2. Add the communication device as shown below. (In this case,
the chosen device was a 1734-ADN DeviceNet Scanner.)
1. Click here to expand the list
of communication adapters.
2. Double-click here to choose
the scanner. You can also
click and drag the scanner
name onto the network.
Make sure you choose the
1734-ADN Point I/O Scanner.
The scanner appears
on the network.
IMPORTANT
The scanner must always exist on the DeviceNet
network at Node 00.
Add I/O Modules to Your Network
After you add the communication device, you must add the POINT
I/O modules connected to the scanner on the PointBus.
1. Add modules as shown below. (In this case, the communication
device shown is a 1770-KFD.)
1. Click here to expand the list
of Specialty modules.
2. Double-click on the catalog
number to choose the
module. You can also click
and drag the module name
onto the network.
Publication 1734-UM006B-EN-P - August 2005
.
Page 43

Configure Your Module 4-3
The out-of-the-box node setting for 1734 modules is 63. You can
change the setting by using the node commissioning tool. The node
commissioning tool is available either online or offline.
IMPORTANT
1
If you commission a node on line, you must power
down your system before the change takes place.
2
3
1. Go to the pulldown T ools.
Select Node Commissioning.
2. Click on Browse.
3. Select the module to change.
4. The node commissioning
dialog returns. It displays the
node number and data rate.
5. Change the node number and
Apply. The dialog will th en
identify the new setting.
6. Click on Close to continue.
4
5
6
Publication 1734-UM006B-E N-P - August 2005
Page 44

4-4 Configure Your Module
Set Counter Parameters
1. Right-click on the module.
2. Click on Properties to
configure your adapter.
After adding the module to the network, you must configure the
modules for use.
IMPORTANT
This chapter shows configuration in the online
mode. Changes set in this mode take effect when
you download to the individual module.
1. Configure the modules as shown below.
You can also left click on the module or name
and the property dialog will pop up.
You will see a pop-up dialog with a series of tabs. Each tab provides
options view or edit.
These are the tabs you click on to
view the options.
Refer to the dialogs for an explanation of its features.
Publication 1734-UM006B-EN-P - August 2005
Page 45

Configure Your Module 4-5
e
The module’s name appears
here.
Type a description here.
The module’s address appears
here. (This field is read only.)
This dialog also shows the
module’s device identity.
These fields are read-only.
Use this pulldown menu to
edit or view the parameters.
Available choices are:
Click on the Device parameters tab
to get to the dialog for setting the
parameters.
At any point, you can click here to finish
changing configuration parameters.
IMPORTANT: If configuration changes ar
made in offline mode, they
do not take effect until the
system goes online.
This dialog appears after clicking on
the Device parameters tab. If you
want the existing parameters
uploaded from the module, select
Upload. The following dialog will
then show the existing parameters
set on the module.
PointBus
Configuration
Status
Publication 1734-UM006B-E N-P - August 2005
Page 46

4-6 Configure Your Module
To configure your module,
select Configuration and
modify the parameters as
desired for your application.
When complete, download to
your module by clicking on the
Download to Device button.
You can download each
change as you make it using
“Single,” or download all your
changes using “All.”
Click here when finished.
Check I/O Status and View the EDS File
Click on the I/O Defaults tab to display
the default characteristics for this
module.
This dialog shows the input/output
defaults for the four modes. These
are:
Strobe
Polled
Change of state and
Cyclic
View the I/O defaults setup, and the EDS file by clicking on the
appropriate tab.
Publication 1734-UM006B-EN-P - August 2005
Page 47

Click on View File to view
the actual EDS file.
Configure Your Module 4-7
Click on the EDS File tab to
display the statistics of the EDS
file used to configure this
module.
You can view the actual
EDS file or edit the file.
Publication 1734-UM006B-E N-P - August 2005
Page 48

4-8 Configure Your Module
Notes:
Publication 1734-UM006B-EN-P - August 2005
Page 49

Access Instantiated Instances
Chapter
5
What This Chapter Contains
Using Instantiated Instances
In this chapter, you learn how to access imbedded Instantiated
Instances (assemblies) in the software. The Encoder/Counter Module
uses several words to communicate real time input and output data as
well as non-real time module information (such as description and
revision) and configuration. These words have been preprogrammed
into Instantiated Instances.
Click on the module to
select the Class
Instance Editor.
Click on Yes when this
dialog appears.
1 Publication 1734-UM006B-E N-P - August 2005
Page 50

5-2 Access Instantiated Instances
1. Select the service code
3. Select the Receive
Data size and radix.
The Class Instance Attribute editor dialog appears.
3. Enter the class,
instance and attribute
here.
4. Click on Execute to
initiate the action.
For example:
If you select Instance 101 (polled connection), the dialog looks like
this.
1. Type in the instance number
here. This is an example of
assembly number 102 (0x66).
(The class is always 4 and the
attribute is always 3.)
2. Click on execute.
3. Data received and status
information is recorded here.
4. Click on Close to finish.
Publication 1734-UM006B-EN-P - August 2005
Page 51

Access Instantiated Instances 5-3
Assemblies
Available assemblies are:
• Assembly 101 is produced for a polled connection.
• Assembly 102 is produced for a Change Of State (COS)
connection.
• Assemblies 103, 104 and 106 are by Explicit message only.
• Assembly 105 is consumed in a polled connection .
Data may be read (get) or written (set) using an Explicit Message. For
example, to read the Present Channel Data, assembly 101
(6516) can
10
be requested.
Data is ordered as followed (byte 0 is the least significant byte):
8 bit byte Byte 0
16 bit word Byte 0, byte 1
32 bit long word Byte 0, byte 1, byte 2, byte 3
In this example, assembly 101,
Service Class Instance Attribute
0E (Get) 04 (Assembly) 65 (Present Data) 03 (Data Attribute)
Instances Services Field Bytes
#101 (0x65) Get Present Channel Data 4
Status 2
#102 (0x66) Get Stored Channel Data 4
Status 2
#103 (0x67) Get Present Channel Data 4
Stored Channel Data 4
Status 2
#104 (0x68) Get Programming Er ro r Code 2
#105 (0x69) Set/Get Counter Control 1
Publication 1734-UM006B-E N-P - August 2005
Page 52

5-4 Access Instantiated Instances
#106 (0x6a) Set/Get Counter Configuration 1
Filter Selection 1
Decimal Position 1
Reserved 1
Time Base 2
Gate Interval 1
Scalar 1
Rollover Value 4
Preset Value 4
Counter Control SSV 1
Publication 1734-UM006B-EN-P - August 2005
Page 53

Troubleshoot the Module
Chapter
6
What This Chapter Contains
Troubleshoot with the
Read this chapter for information about troubleshooting with the
indicators.
See the figures that show the 5 indicators on the frontplat e of each
module. Use these indicators for troubleshooting.
Indicators
1734-IJ
Module Status
Network Status
Status of Input A
Status of Input B
Status of Input Z
1734-IK
Indication Probable Cause
Module Status
Off No power applied to device.
Green Device is operating normally.
Flashing Green Device needs commissioning due to configuration missing,
Flashing Red Recoverable fault is present.
Red Unrecoverable fault may require device replacement.
Flashing
Red/Green
1 Publication 1734-UM006B-E N-P - August 2005
incomplete, or incorrect.
Device is in self-test.
Page 54

6-2 Troubleshoot the Module
Indication Probable Cause
Network Status
Off Device is not online.
Flashing Green Device is online, but has no connections in the established
Green Device online and has connections in the established state.
Flashing Red One or more I/O connections are in timed-out state
Red Critical link failure with failed communication device is
Flashing
Red/Green
Indication Probable Cause
Input Status
Off Input is inactive.
Yellow Input is active and under control.
- Device has not completed dup_MAC_id test.
- Device not powered - check module status indicator.
state.
present. Device detected error that prevents it
communicating on the network.
Communication faulted device - the device detected a
network access error and is in communication faulted state.
Device received and accepted an Identify Communication
Faulted Request with long protocol message.
Publication 1734-UM006B-EN-P - August 2005
Page 55

Appendix
A
Configure Modules in RSLogix 5000 Software
What This Appendix Contains
Understand Data, Connection, and Communication Formats
Read this appendix for information about how to configure your
modules in RSLogix 5000 software, including how to complete entries
on the following dialogs.
• Fault/Program Action
• Counter Configuration
Before you configure your modules, note the following about Data
formats and Connection types.
• Data format type is Integer.
• Connection types are as follows.
• Data
• Listen Only
Communication formats for adapters are as follows.
• Listen Only - Rack Optimization
• None
• Rack Optimization
Choices for formats for the module depend on the Communication
format for the adapter. See the table for a listing of possible module
Connection formats based on adapter Communication formats.
Adapter Communication Formats Possible Module Connection Formats
Listen Only - Rack Optimization
None Data (default)
Rack Optimization Data (default)
1 Publication 1734-UM006B-E N-P - August 2005
Data (default)
Listen Only
Listen Only
Listen Only
Page 56

A-2 Configure Modules in RSLogix 5000 Software
When you change Connection and Data Format, note the following.
• You do not delete the existing module.
• You do not create a new module.
• You bring forward all possible configuration data for the new
setting.
• Configuration data that you cannot bring forward sets to the
default value.
Once you apply new settings, this becomes the base configuration for
the next change in Connection and Data Format settings. When you
select Apply, you lose all configuration data from previous data
formats.
See the table for a listing of tags and dialogs based on Connection
type.
Connection Type Tags Dia logs
Data Input
Output
Configuration
Listen Only Input General
General
Connection
Module Info
Fault/Program
Counter Configuration
Connection
Module Info
Publication 1734-UM006B-EN-P - August 2005
Page 57

Configure Modules in RSLogix 5000 Software A-3
Configure Your Module
To configure your module in RSLogix 5000, complete the following.
1. Configure your adapter.
Refer to the user manual for your adapter for information on
how to configure the adapter and add modules to the I/O
configuration to include selecting a controller and
communication module.
2. Add a 1734-IJ or 1734-IK specialty module, according to the
instructions in your adapter user manual.
3. From the Connection dialog, perform the following.
a. Select a value for the Requested Packet Interval (RPI) entry.
• Default value is 80.0 milliseconds.
• Range is 2.0 to 750.0 milliseconds.
b. Leave the following unchecked.
• Inhibit Module
• Major Fault On Controller If Connection Fails
While in Run Mode
Use the Help Button
4. Complete entries for the following dialogs, as explained in this
chapter.
• Fault/Program Action
• Counter Configuration
From the Fault/Program Action and Counter Configuration dialogs,
click Help at the bottom of the dialog for information about how to
complete entries on the dialogs.
From a warning dialog, click Help at the bottom fo the dialog to get
information about that specific error.
Publication 1734-UM006B-EN-P - August 20 05
Page 58

A-4 Configure Modules in RSLogix 5000 Software
Work with the Fault/Program Action Dialog
In Hard Run mode, you disable all controls on the Fault/Program
Action, in addition to the enable and disable state for each control.
Complete these entries from the dialog.
1. Check the checkboxes, as shown in the table.
Check This
Checkbox
Counter Reset Reset the counter
Counter Preset Set the value of the counter, as specified by the preset words
Value Reset Reset the value of the accumulated (stored) count
2. From the bottom of the Fault/Program Action dialog, perform
one of the following.
• Click another tab at the top of the dialog, for example, click
Counter Configuration to continue configuration.
or
• Click OK, which closes the Fault/Program Action dialog.
or
• Click Cancel to return to default values.
or
• Click Apply to save changes you made on any of th e dialogs
and continue to display the dialog, noting that you enab le the
Apply button when you make changes to any of the dialogs.
To
Publication 1734-UM006B-EN-P - August 2005
Page 59

Configure Modules in RSLogix 5000 Software A-5
Work with the Counter Configuration Dialog
Complete entries as follows from the Counter Configuration dialog.
1. For Type, select one of the following, to set the Counter
Configuration mode.
• Counter (default)
• Encoder X1, Encoder X2, or Encoder X4
• Period/Rate
• Rate Measurement
2. Refer to the table to see what entries to complete based on what
you enter for Type.
Complete This Entry If You Select This for Type
Counter Encoder
X1, X2, X4
Store Count Mode X X
Rollover X X
Counter Attenuator X X
Frequency Precision X X
Time Base/Gate Interval X
Invert Input Z X X X
Scalar X
Period/
Rate
Rate
Measurement
Publication 1734-UM006B-EN-P - August 20 05
Page 60

A-6 Configure Modules in RSLogix 5000 Software
3. Refer to the table to make selections for the following entries.
• Store Count Mode
• Rollover
• Preset
• Counter Attenuator
• Frequency Pr ecision
• Gate Multiplier
• Time Base
• Actual Gate Interval
If You Selected This for Type For This Value Select Comments
Counter (default)
Encoder X1
Encoder X2
Encoder X4
Period/Rate
Rate Measurement
Store Count
Mode
Rollover 1 to 16777216 Default is 16777215.
Preset 0 to 16777215 Default is 0.
Counter
Attenuator
Frequency
Precision
Gate Multiplier 1 to 200 Default is 1.
Time Base 10 to 3000 milliseconds
Actual Gate
Interval
Store Count Disabled
Store-Continue
Store-Wait-Resume
Store, Reset-Wait-Start
Store, Reset-Start
0 to 255 Default is 1.
X 0.0001
X 0.001
X 0.01
X 0.1
X 1
X 10
X 100
in multiples of 10
You do not make a
selection, as this is a static
field you do not configure.
Default is Store Count Disabled.
Select an option to determine which mode you use
for operating the Z Gate/Reset Terminal,
Select a value greater than the value for Preset.
Select a value smaller than the value for Rollover.
Select a value to attenuate the counter display.
Default is X1.
Select a value to multiply the frequency by the factor
selected.
Select a value so that the product of Gate Multiplier
and Time Base does not exceed 3 seconds
(3000 milliseconds).
Default is 1000.
This is the product of Gate Multiplier and Time Base.
An acceptable value is less than 3 seconds
(3000 milliseconds).
Publication 1734-UM006B-EN-P - August 2005
Page 61

Configure Modules in RSLogix 5000 Software A-7
4. For Filter, select the Frequency from the following, which is the
value you use to filter A/B/Z inputs when you check a
corresponding checkbox.
• No Filter
• 50 kHz
• 5 kHz
• 500 Hz
• 50 Hz (default)
5. Check the checkboxes for the following, which use the value
you selected for Filter.
• Filter A
• Filter B
• Filter Z
6. For Invert, check the checkbox to invert the signal at Z input, if
you selected the following for Type.
• Counter
• Encoder X1, Encoder X2, or Encoder X4
• Period/Rate
7. For Scalar, if you selected Period/Rate, choose one of the
following values.
• 1
• 2
• 4
• 8
• 16
• 32
• 64
• 128
If you apply the filter, you scale the filtered Z. The value you
chose for Scalar scales the Z signal for the following
configurations.
• Period/Rate
• Continuous/Rate
• Pulse Generator
Publication 1734-UM006B-EN-P - August 20 05
Page 62

A-8 Configure Modules in RSLogix 5000 Software
When the value for Scalar is one of the following, frequency
precision <
1.
• 16
• 32
• 64
• 128
8. Perform one of the following.
• Click another tab at the top of the dialog.
or
• Click OK, which closes the dialog.
or
• Click Cancel to return to default values.
or
• Click Apply to save changes you made on any of th e dialogs
and continue to display the dialog, noting that you enab le the
Apply button when you make changes to any of the dialogs.
Publication 1734-UM006B-EN-P - August 2005
Page 63

gate interval setting 3-6
Index
A
adding modules to the network 4-2
adding the communication device 4-2
assembly selection 3-8
B
base assembly, mounting 2-1
C
CE directives P-2
checking I/O status 4-6
class instance attribute editor 5-2
class instance editor 5-1
configuration 4-1
configuration, default 1-8
counter mode 1-2
counter mode operation 1-2
D
data table - complete format 3-1
decimal position - frequency or counter display 3-6
default configuration 1-8
directives, European Union P-2
I
input word - present channel data 3-2
installation, module 2-2
installation, removable terminal block 2-4
K
keyswitch position 2-3
M
module installation 2-2
module/channel error bits 3-2
mounting base, removal 2-4
mounting, base assembly 2-1
N
new data indicator 1-8
O
operation - counter mode 1-2
operation - encoder mode 1-3
operation - rate measurement mode 1-7
operation - scalar 1-6
E
encoder mode 1-2
encoder mode operation 1-3
F
format - data table 3-1
G
gate interval 3-6
P
period rate mode - operation 1-5
period/rate mode 1-2
present channel data 3-2
preset configuration 3-7
R
rate measurement mode 1-2
rate measurement mode operation 1-7
rollover configuration 3-7
Publication 1734-UM006A-EN-P - August 2000
Page 64

2 Index
S
safe state configuration 3-8
scalar 3-7
scalar operation 1-6
setting counter parameters 4-4
setting rollover counts 3-7
setting safe state values 3-8
setting the counter gate interval 3-6
setting the preset value 3-7
stored/accumulated channel data 3-2
V
viewing EDS files 4-6
Z
Z gate/reset terminal modes of operation 1-9
Z gate/reset terminal operation 1-9
Publication 1734-UM006A-EN-P - August 2000
Page 65

Pub. Title/Type Encoder/Counter Modules
How Are We Doing?
Your comments on our technical publications will help us serve you better in the future.
Thank you for taking the time to provide us feedback.
You can complete this form and mail (or fax) it back to us or email us at
RADocumentComments@ra.rockwell.com
Cat. No.
!734-IJ and 1734-IK
Pub. No. 1734-UM006B-EN-P Pub. Date August 2005 Part No. 957974-39
Please complete the sections below. Where applicable, rank the feature (1=needs improvement, 2=satisfactory, and 3=outstanding).
Overall Usefulness 1 2 3 How can we make this publication more useful for you?
Completeness
(all necessary information
is provided)
Technical Accuracy
(all provided information
is correct)
1 2 3 Can we add more information to help you?
procedure/step illustration feature
example guideline other
explanation definition
1 2 3 Can we be more accurate?
text illustration
(all provided information is
Clarity
easy to understand)
Other Comments You can add additional comments on the back of this form.
Your Name
Your Title/Function Would you like us to contact you regarding your comments?
Location/Phone
Return this form to: Rockwell Automation Technical Communications, 1 Allen-Bradley Dr., Mayfield Hts., OH 44124-9705
Publication CIG-CO521C-EN-P- May 2003 PN957782-91
1 2 3 How can we make things clearer?
___No, there is no need to contact me
___Yes, please call me
___Yes, please email me at _______________________
___Yes, please contact me via _____________________
Fax: 440-646-3525 Email: RADocumentComments@ra.rockwell.com
Page 66

Other Comments
PLEASE FASTEN HERE (DO NOT STAPLE)
PLEASE FOLD HERE
BUSINESS REPLY MAIL
FIRST-CLASS MAIL PERMIT NO. 18235 CLEVELAND OH
POSTAGE WILL BE PAID BY THE ADDRESSEE
NO POSTAGE
NECESSARY
IF MAILED
IN THE
UNITED STATES
PLEASE REMOVE
Page 67

Page 68

Back Cover
Publication 1734-UM006B-EN-P - August 2005 6 PN 957974-39
Supersedes Publication 1734-UM006A - August 2000 © 2005 Rockwell International Corporation. Printed in the U.S.A.
 Loading...
Loading...