

Page 1
0
Page 2

123
Page 3
Page 4
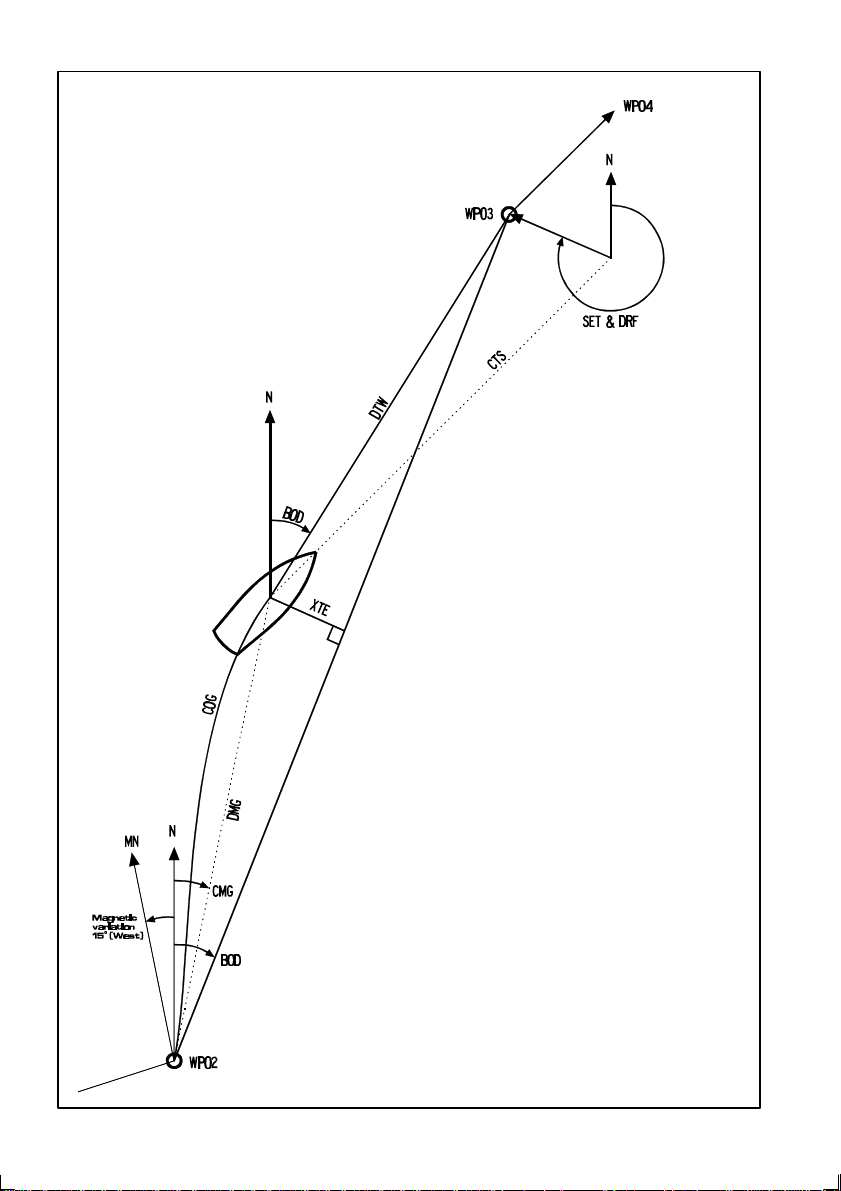
Navigation terms
BOD: Bearing origin destination
BTW: Bearing to Waypoint
CMG: Course made good
COG. Course over ground
CTS: Course to steer
DMG: Distance made good
DRF: Drift speed
DTW Distance to Waypoint
MN: Magnetic North
N: North
SET: Drift direction
SOG: Speed over ground
XTE: Cross track error
Page 5

4
Page 6

1 Part specification ..................................................................................................8
2 Installation...........................................................................................................12
2.1 Installing the instrument...............................................................................13
2.1.1 Installing instrument to the Server...........................................................14
3 First start..............................................................................................................15
3.1 Initialising the instrument.............................................................................15
3.2 Re-initialising the instrument .......................................................................15
4 Operation .............................................................................................................16
4.1 About this manual........................................................................................16
4.2 How to use the push-buttons.......................................................................17
4.2.1 PAGE.......................................................................................................17
4.2.2 MINUS.....................................................................................................17
4.2.3 PLUS.......................................................................................................17
4.2.4 SET..........................................................................................................18
4.2.5 Clear / cancel / reset ...............................................................................18
4.2.6 Calibration ...............................................................................................18
4.2.7 Lighting....................................................................................................18
5 Function overview...............................................................................................19
6 SPEED functions.................................................................................................20
6.1 SPEED main-function..................................................................................20
6.2 SPEED sub-functions..................................................................................20
6.2.1 TRIP LOG (TRP) .....................................................................................20
6.2.2 TOTAL LOG (LOG)..................................................................................20
6.2.3 MAXIMUM SPEED (MAX) .......................................................................20
6.2.4 START TIMER (STA)...............................................................................20
6.2.5 TIMER .....................................................................................................20
6.2.6 AVERAGE SPEED (AVS)........................................................................20
6.2.7 DISTANCE (DST)....................................................................................20
6.2.8 DEPTH (unit/DPT) ................................................................................... 21
7 PLUS functions ...................................................................................................22
7.1 DEPTH main-function..................................................................................22
7.2 DEPTH sub-functions .................................................................................. 22
7.2.1 LIGHT CONTROL....................................................................................22
7.2.2 BATTERY (BAT)......................................................................................23
7.2.3 SHALLOW ALARM (SHA).......................................................................23
7.2.4 DEPTH ALARM (DEA) ............................................................................23
7.2.5 ANCHOR ALARM.................................................................................... 23
7.2.6 HEADING (HDT/HDM) ............................................................................23
7.2.7 TEMPERATURE (TMP)...........................................................................23
7.2.8 UNIVERSAL TIME (UTC)........................................................................23
7.2.9 BOAT SPEED (BSP/unit) ........................................................................23
7.3 Remote Control (REM) ................................................................................24
7.4 Set and turn on shallow (SHA) and depth alarm (DEA)...............................25
7.5 Set and turn on anchor alarm (ANC) ........................................................... 25
7.6 Clear an alarm value ...................................................................................25
7.7 Silencing an alarm.......................................................................................25
7.8 Turning off / on an alarm ............................................................................25
8 NAVIGATION functions.......................................................................................26
8.1 NAVIGATION main-function........................................................................26
8.2 NAVIGATION sub-functions ........................................................................26
8.2.1 STEER REFERENCE (Pilot OFF)...........................................................26
8.2.2 STEER VALUE (STR) .............................................................................26
8.2.3 (SOG) and (COG)....................................................................................26
5
Page 7

8.2.4 (BTW) and (DTW)....................................................................................26
8.2.5 LATITUDE and LONGITUDE (POS)........................................................26
8.2.6 SET and DRIFT .......................................................................................27
8.2.7 (CMG) and (DMG)....................................................................................27
8.2.8 WAYPOINT CLOSURE VELOCITY (WCV).............................................27
8.2.9 CROSS TRACK ERROR (XTE)...............................................................27
8.3 Steer reference (Pilot)..................................................................................28
8.3.1 Overview of steer reference (Pilot) ..........................................................29
8.3.2 Steer reference (MEM) ............................................................................29
8.3.3 Steer reference (BTW).............................................................................30
8.3.4 Steer reference (CTS)..............................................................................31
8.3.5 Steer reference (AWA) ............................................................................31
9 Wind functions.....................................................................................................33
9.1 WIND Main-function.....................................................................................33
9.2 WIND Sub-functions ....................................................................................33
9.2.1 STEER REFERENCE (Pilot OFF) ...........................................................33
9.2.2 STEER VALUE (STR)..............................................................................33
9.2.3 APPARENT WIND SPEED (AWS)..........................................................34
9.2.4 TRUE WIND ANGLE (TWA)....................................................................34
9.2.5 TRUE WIND SPEED TWS......................................................................34
9.2.6 VELOCITY MADE GOOD (VMG).............................................................34
9.2.7 TACTICAL FUNCTION (TAC)..................................................................34
9.2.8 GEOGRAPHIC WIND DIRECTION .........................................................35
9.3 Tactical function...........................................................................................36
10 Man over board (MOB) function.........................................................................37
11 Customise your display ......................................................................................38
11.1 Move and lock a sub-function ......................................................................38
11.2 Copy and lock a sub-function.......................................................................38
11.3 Select power on function..............................................................................39
11.4 Cancel a moved or locked sub-function.......................................................39
11.5 Temporary locking of alternating functions ..................................................39
12 Calibration............................................................................................................40
12.1 Calibration of speed C10 ............................................................................40
12.1.1 C10 Return (RET)................................................................................40
12.1.2 C11 (Unit KTS) ....................................................................................40
12.1.3 C12 (1.25 CAL)....................................................................................40
12.1.4 C13 DAMPING (SEA)..........................................................................41
12.2 C20, calibration of depth..............................................................................41
12.2.1 C20 (RET)............................................................................................41
12.2.2 C21 (Unit m)........................................................................................41
12.2.3 C22 ( - 00.0 ADJ).................................................................................41
12.2.4 C23 (Unit°C)........................................................................................41
12.2.5 C24 (0°C TMP)....................................................................................41
12.3 C30, calibration of navigation.......................................................................42
12.3.1 C30 (RET)............................................................................................42
12.3.2 C31 (PAGE ATO) ................................................................................42
12.3.3 C32 (00° OCA).....................................................................................42
12.3.4 C33 (00.0 VAR)...................................................................................42
12.3.5 C34 (Auto DEV)...................................................................................42
12.3.6 C35 (Auto CHK)...................................................................................42
12.3.7 C36 (Auto CLR)...................................................................................42
12.3.8 C37 (000°ADJ) ....................................................................................42
12.3.9 C38 (OFF SEC)...................................................................................42
6
Page 8

12.3.10 C39 (Pilot SEA) ...................................................................................42
12.3.11 C40 (OFF MAG) ..................................................................................43
12.3.12 C41 DAMPING (SEA).......................................................................... 43
12.4 Compass calibration....................................................................................43
12.4.1 Automatic compass deviation compensation (Auto DEV)................... 43
12.4.2 Automatic compass deviation check (Auto CHK)................................44
12.4.3 Cancel earlier performed compass deviation (Auto CLR)................... 44
12.4.4 Compass misalignment correction (Adj) .............................................44
12.5 C50, calibration of wind ...............................................................................45
12.5.1 C50 (RET)...........................................................................................45
12.5.2 C51 (PAGE ATO)................................................................................45
12.5.3 C52 (OFF TWA)..................................................................................45
12.5.4 C53 (Unit m/s).....................................................................................45
12.5.5 C54 (1.50 CAL) ................................................................................... 45
12.5.6 C55 (000° ADJ)...................................................................................45
12.5.7 C56-C63 Wind calibration values........................................................45
12.5.8 C64 (WIA) ........................................................................................... 46
12.5.9 C65 DAMPING (SEA)..........................................................................46
12.6 C70, calibration of Network and NMEA .......................................................47
12.6.1 C70 (RET)...........................................................................................47
12.6.2 C71 (OFF KEY)...................................................................................47
12.6.3 C72 (d0 SEA)......................................................................................47
12.6.4 C73 (OFF BSP)...................................................................................47
12.6.5 C74 (OFF DEP)...................................................................................47
12.6.6 C75 (OFF CMP)..................................................................................47
12.6.7 C76 (OFF WND) .................................................................................48
12.6.8 C77 to C92..........................................................................................48
12.6.9 C93 (d4 NME) .....................................................................................48
12.6.10 C94 (OFF COG) ..................................................................................48
12.6.11 C95 (OFF SOG) ..................................................................................48
12.7 NMEA ..........................................................................................................49
12.7.1 Transmit NMEA sentences OUT from Server .....................................49
12.7.2 Change NMEA sentences OUT from Server.......................................50
12.7.3 Receive NMEA sentences IN to Server...............................................51
12.8 Special NMEA sentences ............................................................................ 53
12.8.1 Baudrate control,.................................................................................53
13 Maintenance and fault finding ...........................................................................54
13.1 Maintenance................................................................................................54
13.2 Fault finding.................................................................................................54
13.2.1 General................................................................................................54
13.2.2 Fault - action .......................................................................................55
13.2.3 Error messages...................................................................................55
14 Specifications......................................................................................................56
14.1 Technical specifications...............................................................................56
14.2 Nexus Network introduction and user policy................................................56
14.3 Equipment Lists...........................................................................................57
14.4 Abbreviations...............................................................................................58
7
Page 9

1 Part specification
Items delivered with the Instrument
Qty. Description Reference
1 FI-30 Multi Control instrument 1
1 Instrument front cover 2
1 Adhesive drill template for instrument 3
1 Operator’s Manuals 4
4 Instrument mounting screws 5
4 Rubber caps for screws 5
1 Connection back cover 5
1 4-pole jack plug 5
1 Silicon paste tube 5
2 Plastic cable strap 5
5 Cable protectors, 0.25 mm (0.1 inch) 6
5 Cable protectors, 0.75 mm (0.3 inch) 6
1 Inter-connection cable, 0.4 m (1 ft ) 7
8
Page 10

9
Page 11

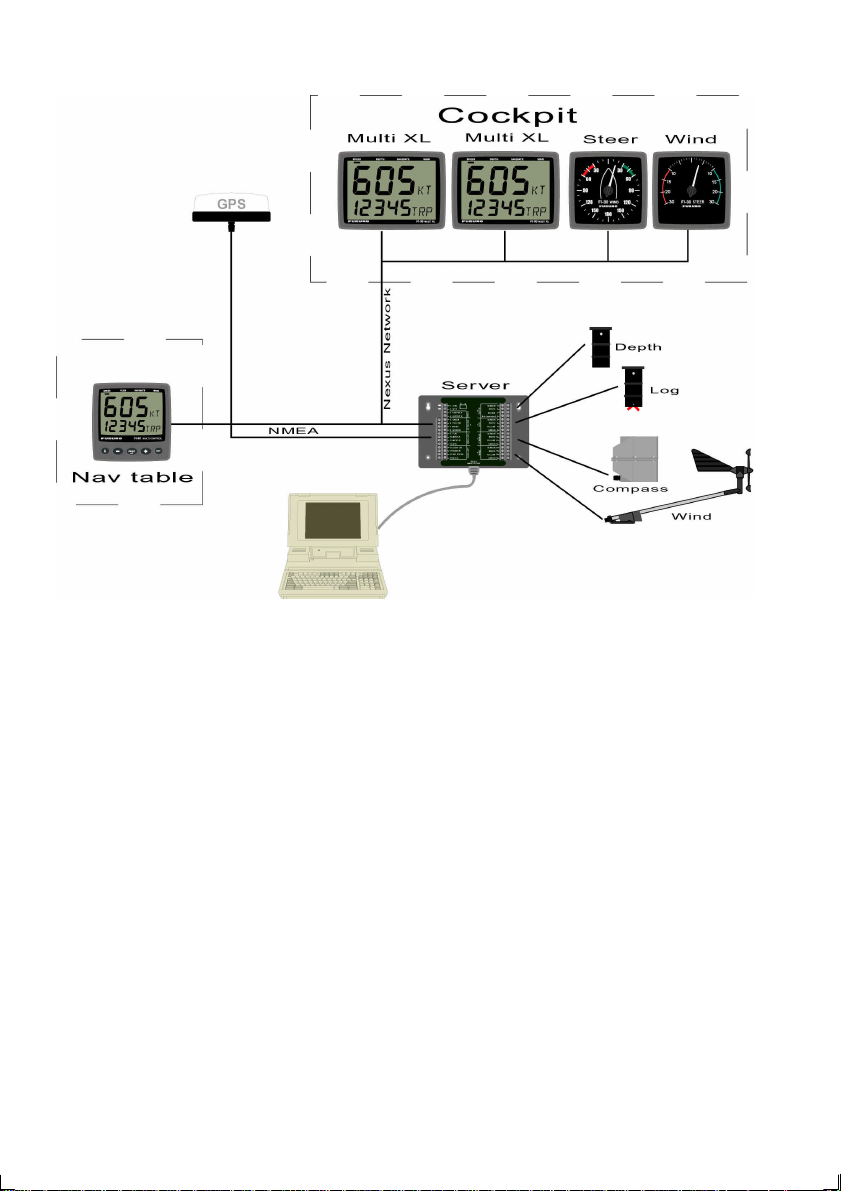
Welcome aboard the Nexus Network!
Thank you for choosing FI-30 and welcome to the world of the Nexus Network.
Through this manual we would like to help you install, operate and understand your
new Nexus Network.
The Server is the ”heart” of your Nexus Network, to which transducers for speed,
depth, heading, wind and navigation (GPS, Loran or Decca) are connected.
From the Server the single Nexus Network cable transmits power and data to the
instruments, which repeat the information sent from the Server, or other FI-30
transducers.
The Nexus Network is designed with the industry standard RS 485 databus, which
allows you to connect up to 32 FI-30 instrument units on the single Nexus Network
cable, thereby allowing you the flexibility to easily develop your system. The Nexus
Network is capable of carrying data 10 times faster than NMEA 0183.
The connection system, with a single 5 mm (1/5") cable and 4-pole jack plugs with
cable protectors, makes the installation easy. No need to drill big holes and the cable
can be cut to exact lengths. The connections at the Server are colour coded and
marked with a number for easy reference.
FI-30 Multi Control is a multi function instrument that displays a main and a subfunction together. You can easily ”customise” your favourite combination of functions,
by using the unique method to move, copy and lock a sub-function.
The instruments large display gives you very good viewing possibilities from any angle,
even in bright sunlight. The display and the five push-buttons have red back lighting
which you can set to three different lighting levels.
A large selection of optional analogue repeaters and accessories are available. The
analogue steer pilot instrument particularly offers unique functions. When used
together with the steer reference function (AWA), you can actually steer after the wind
and ”expand” the tacking or down wind angle.
These FI-30 instruments carry a two year warranty, which gives you as our customer,
confidence to trust FI-30 and our commitment to quality.
To get the most out of your new FI-30 product, please read through this manual
carefully before you start your installation.
Again, thank you for choosing FI-30. If you see us at a show, stop by and say hello.
Good luck and happy boating!
10
Page 12
11
Page 13
2 Installation
• The installation includes 6 major steps:
1. Read the operation manual.
2. Plan where to install the transducers and instruments.
3. Run the cables.
4. Install the transducers and instruments.
5. Take a break and admire your installation.
6. Learn the functions and calibrate your system.
Before you begin drilling ... think about how you can make the installation as neat
and simple as your boat will allow. Plan where to position the transducers, Server
and instruments. Think about leaving space for additional instruments in the future.
• A few ”do nots” you should consider:
− Do not cut the cables too short. Allow extra cable length at the Server so
it can be disconnected for inspection without having to disconnect all
attached cables.
− Do not place sealant behind the display. The instrument gasket eliminates
the need for sealant.
− Do not run cables in the bilge, where water can appear.
− Do not run cables close to fluorescent light sources, engine or radio
transmitting equipment to avoid electrical disturbances.
− Do not rush, take your time. A neat installation is easy to do.
• The following material is needed:
Wire cutters and strippers.
Small and large Philips and small flat head screw driver.
Hole saw for the instrument clearance hole 63 mm (2½").
5 mm (1/4") drill for the mounting holes.
Plastic cable ties
If you are doubtful about the installation, obtain the services of an experienced
technician.
12
Page 14
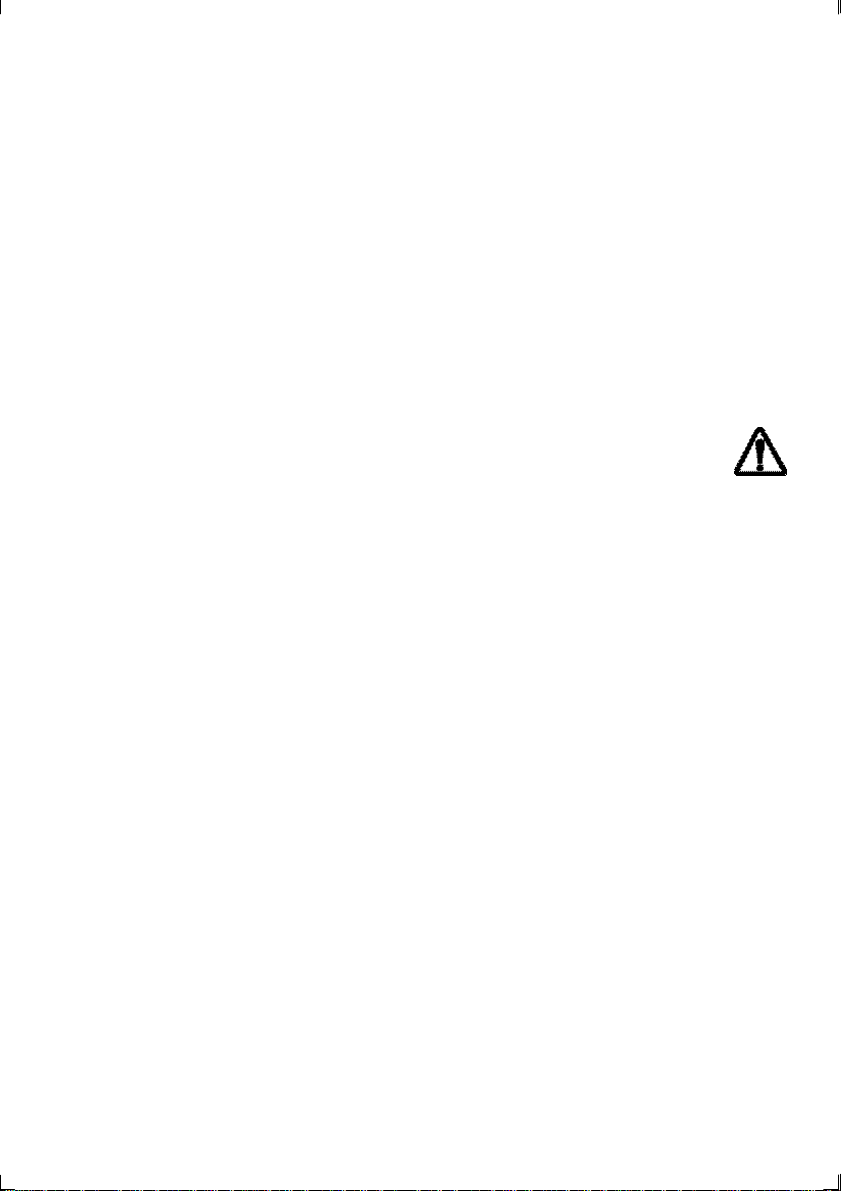
2.1 Installing the instrument
• Place the adhesive drill template on the desired location for the instrument. Drill
the 2 holes using a 5 mm (1/4") drill for the two pin bolts. Use a 63 mm (2½") hole
saw to machine the clearance hole for the instrument connection socket. Remove
the template.
• Screw the two pin bolts to the instrument
• Put the instrument in place
• Screw the two nuts from the back
Note! The two nuts must just be tighten by hand
• Run the Nexus Network cable from the Server
to the instrument.
• If you want to cut the Nexus Network cable to
length, disconnect 4-pole jack plug and cut the
cable. Peel off about 35 mm (1,4") of the cable
insulation. Remove about 6 mm (1/4") from the
3 isolated wires (the 4th wire is an earth /
screen). Attach the 4 cable protectors to the
wires using a pair of flat pliers.
• Connect the 4 cable protectors to the 4-pole
jack plug as shown. Apply silicon paste on all
locations as shown.
Silicon paste
Note: Must be done to avoid corrosion.
13
Page 15
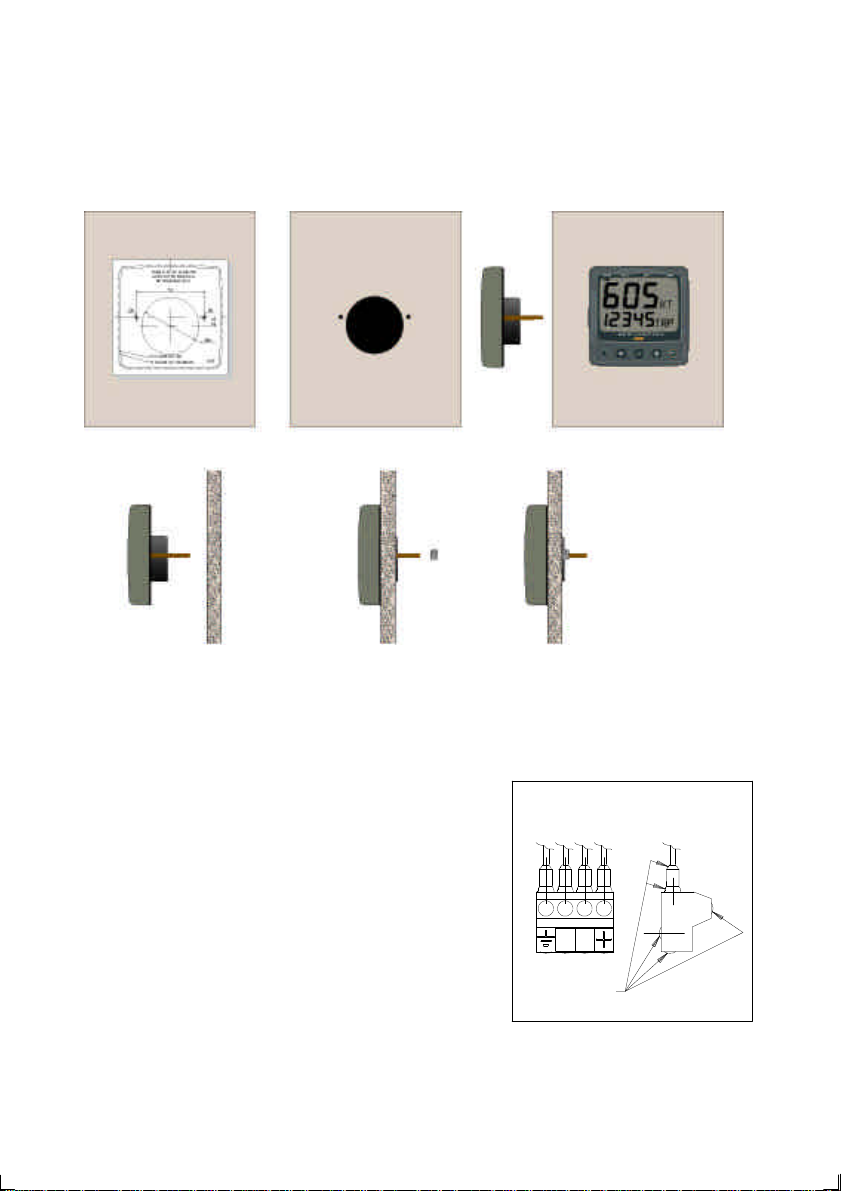
• Apply silicon paste to the instrument connection pins at the back of the instrument.
Press the jack plug onto the instrument pins. Press the cable in to the cable leads.
• Mount the connection back cover with the screw.
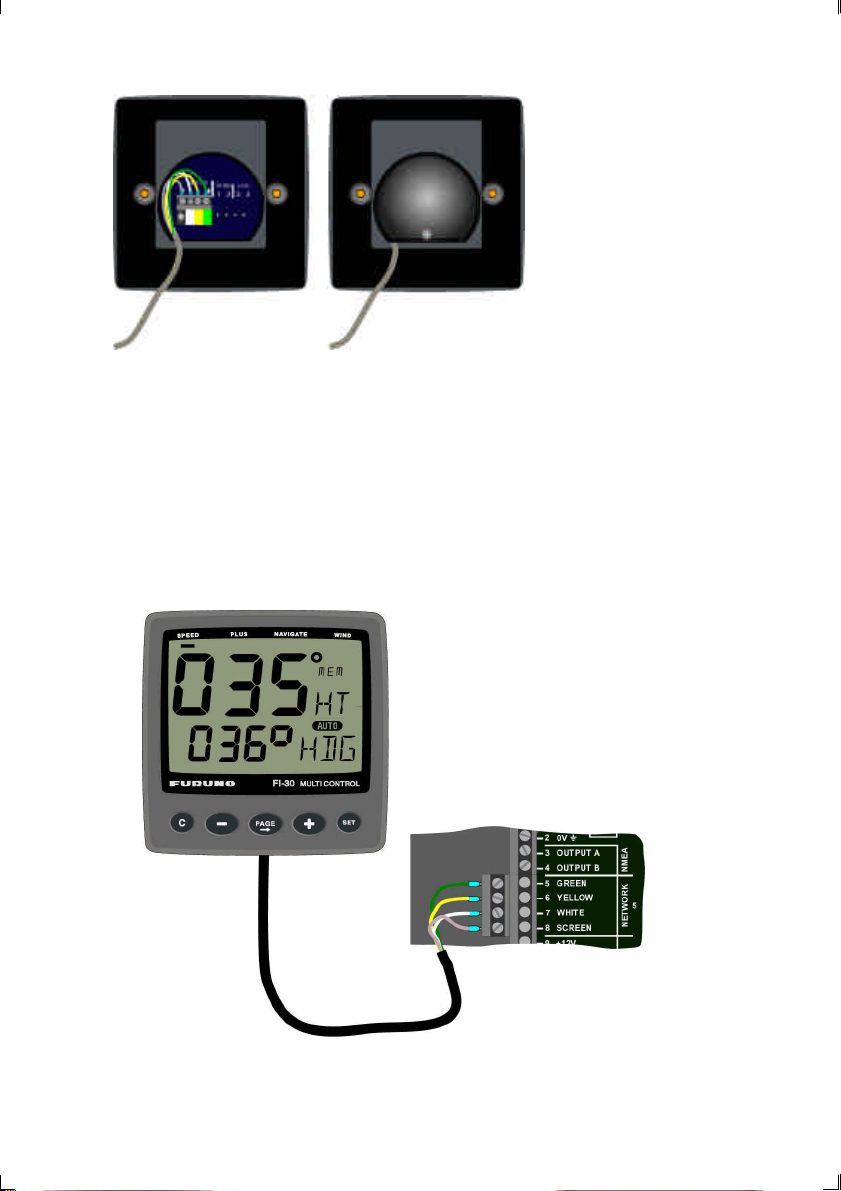
2.1.1 Installing instrument to the Server
All FI-30 instruments are connected directly to the Nexus Network in a daisy chain.
They all use the same colour coded 4-pole jack plugs.
14
Page 16
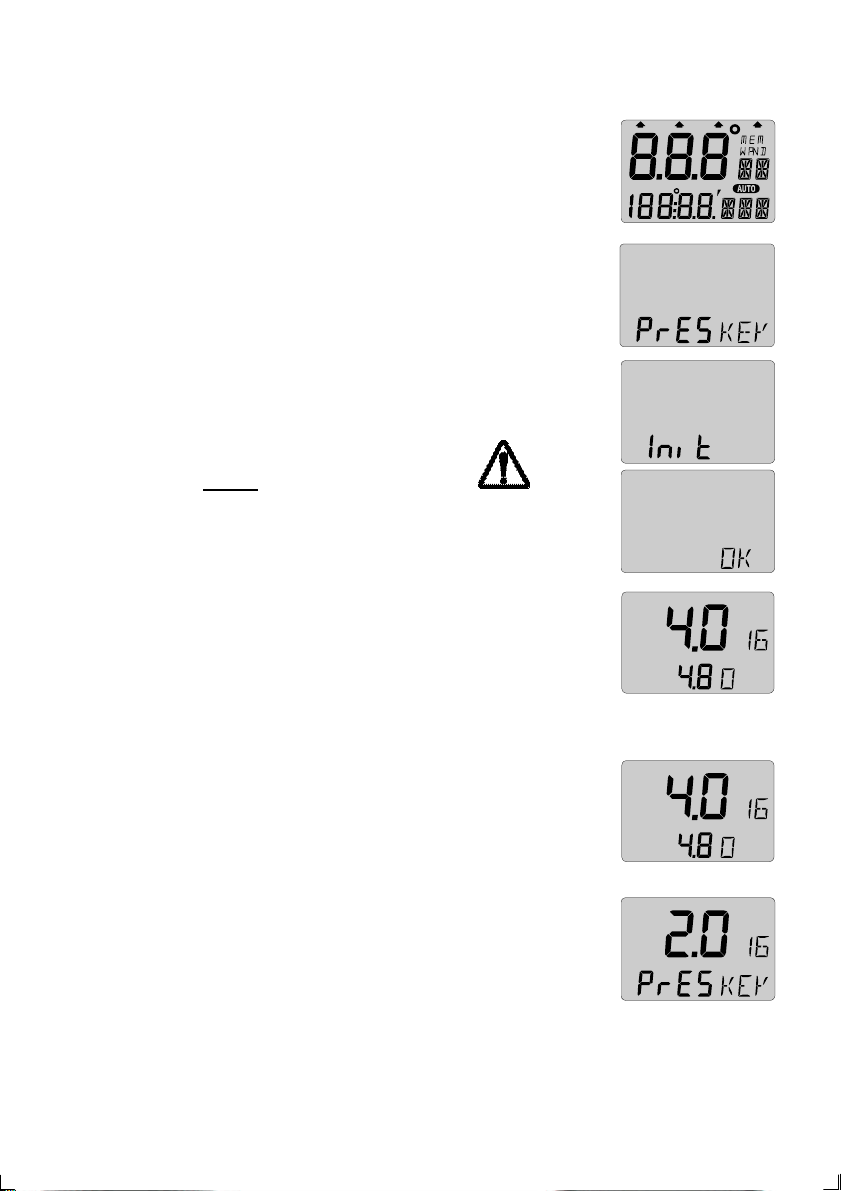
3 First start
3.1 Initialising the instrument
At power on, the instrument will perform a self test. The display will
first show all segments, then the software version number and the
Nexus Network ID number.
At first power on after installation, you will be asked to press SET
(PrESkey). This will give the instrument a logical ID number on the
Nexus Network.
To initialise the instrument, press SET on all installed digital
instruments, one at the time.
Note: Always wait for the text ”Init OK”
to be displayed, before you press SET
on the next instrument!
The Server automatically gives the first unit ID number 16, then 17
and so on. The order in which you press SET is the same order as
the instruments will be given a logical ID number on the Nexus
Network.
The example shows that the instrument version number is 4.0 and
the given logical ID number is 16. On the lower line, the bus master
version number (4.8) and ID (0) is displayed.
3.2 Re-initialising the instrument
If two instruments by mistake have the same ID number, this can
cause disturbance and block the information on the Nexus data
bus.
To re-initialise the instrument, press CLEAR during the power up
sequence when version and ID numbers are displayed.
The display self test is then re-started on all instruments and you
will be asked to press KEY on each instrument as explained above.
Note! If you do not succeed to re-initialise, we suggest
you disconnect all but one instrument with the same
ID number, then repeat the above procedure.
15
Page 17

4 Operation
4.1 About this manual
• In this manual each time a push-button is refereed to, the push-button name will
appear in bold and CAPITAL letters example PAGE.
• Unless otherwise stated the push-button presses are momentary.
• Each time a function is mentioned in the text, it will be in brackets and in the same
format, where possible, as displayed, ex. (LAt).
• By the word navigator, we mean a GPS, Loran or Decca instrument.
• Which instrument is navigating? By the term navigating, we mean the active
instrument in which the waypoint memory is used for navigation to calculate the
navigation data, ie BTW, DTW etc. There can only be one instrument on the Nexus
Network which is keeping the waypoints in memory, but the waypoints can be
reached from all instruments.
• This manual has been written to be:
Compatible with FI-30 Server from software version 3.0.
Compatible with FI-30 Multi Control instrument from software
version 3.0
The products can be updated to the latest version for a fee.
• Please contact your FURUNO dealer for further information.
16
Page 18
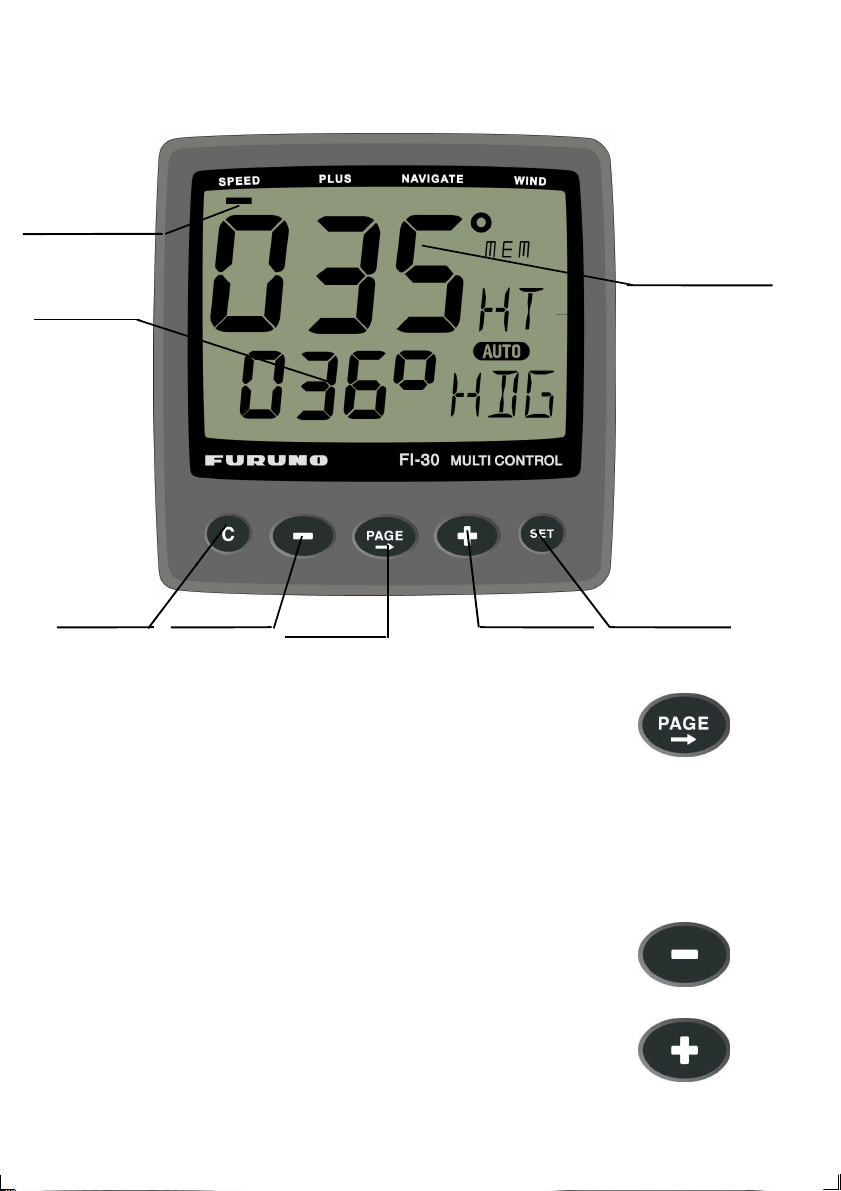
4.2 How to use the push-buttons
PAGE
SIGN
SUB
FUNCTION
MAIN
FUNCTION
CLEAR MINUS PLUS
4.2.1 PAGE
A press on PAGE moves the top LCD arrow to the next page. It
scrolls in a circular pattern, one step to the right for every press, in the
order SPEED, DEPTH, NAVIGATE, WIND and then back to SPEED
page again. A press on PAGE and MINUS together, back steps
PAGE to the preceding page.
The PAGE button is also used to move the cursor when in edit mode.
A press on PAGE moves the cursor in a circular pattern, one step to the right for every
press.
A press on PAGE and MINUS together, back steps cursor to the preceding step.
4.2.2 MINUS
A press on MINUS moves to the next sub-function.
In edit mode it decreases to the previous digit.
4.2.3 PLUS
A press on PLUS moves to the previous sub-function.
In edit mode it increases to the next digit.
PAGE
17
SET
Page 19
4.2.4 SET
A press on SET unlocks a digit to access edit mode.
When unlocked, the digits are ”active” (flashes) and can be edited by
pressing MINUS, PLUS and PAGE as required.
When finished editing, lock the digit by another press on SET.
4.2.5 Clear / cancel / reset
A press on CLEAR, clear digits, cancel alarms or resets the counters.
4.2.6 Calibration
To access calibration mode, press and hold SET more than 2 seconds.
To return to main-function mode, press SET when the text return (RET) is
shown.
2 sec
4.2.7 Lighting
The instrument uses red back lighting for the display and the 4 push-buttons.
The lighting can be set at 4 different levels.
To quick access the light control, press and hold PAGE for more than 2
seconds. The flashing text (Lit OFF) will be displayed and the display will
be lit momentarily.
2 sec
To select between the 4 light levels, Press PLUS: LOW, MED, MAX and OFF. To lock
the selected level press SET.
The selected light level will be copied to all FI-30 instruments connected to the system.
When the lighting is on, it is not possible to reduce or turn off the lighting on an
individual instrument.
18
Page 20

5 Function overview
The functions in the Multi Control instrument are divided into 4 pages:
SPEED, DEPTH, NAVIGATE and WIND.
The selected page is indicated by the LCD arrow at top of the display.
Each page has 2 types of functions that can be displyed together:
1. Main-function, displayed at the top of the display in 30 high digits.
2. Sub-function, displayed at the bottom part of the display in 17 mm high digits.
You can easily customise your favourite combination of functions, (See chapter 11).
The instrument can display metric and imperial units.
For unit selection, (see chapter 12).
For function overview and transducers needed to display each function, see the inside
of the back cover.
In addition, the enclosed laminated quick guide will help you to get an overview when
using the instrument onboard.
19
Page 21

6 SPEED functions
6.1 SPEED main-function
Boat speed through the water.
Unit available in knots (KT), km/h (Kh) or miles/h (Mh) (See
12.1.2, C11). If a navigator is connected, speed over ground
(SOG) can be displayed. (See 12.6.11,C95).
6.2 SPEED sub-functions
6.2.1 TRIP LOG (TRP)
0-199,99 NM, only displayed in NM. Distance covered from power
on.
To reset TRIP LOG press CLEAR.
6.2.2 TOTAL LOG (LOG)
0-19999 NM, only displayed in NM. Can not be reset.
6.2.3 MAXIMUM SPEED (MAX)
Maximum speed since power on, or from reset of timer. To reset,
press CLEAR.
6.2.4 START TIMER (STA)
Count down timer from 59 to 1 minutes.
To start the timer from minus 10 minutes (-10’STA) press SET.
The figure 1 in 10 is flashing. If you want to start count down from
10 minutes, press SET.
If you want to start the timer from any other time (59 to 1 minute)
for example minus 5 minutes (-5’STA), press PAGE, MINUS and
PLUS as required to set 5 minutes and start the timer with SET.
When started, displays the count down time in minutes and
seconds.
During the last 10 seconds the alarm will sound once every
second.
6.2.5 TIMER
Elapsed time in hr/min/sec from power on, or from end of start
timer count down. To reset, press CLEAR.
6.2.6 AVERAGE SPEED (AVS)
Average speed from power on, or from reset of timer. To reset
press CLEAR.
6.2.7 DISTANCE (DST)
Covered distance from power on, or from reset of timer. To reset,
press CLEAR.
20
Page 22

6.2.8 DEPTH (unit/DPT)
Depth from the water surface or the keel depending on calibration
setting (See 12.2.3, C22).
Unit available in meters (m), feet (FT) or fathoms (FA). (See
12.2.2,C21).
The text alternates between the selected (unit) and (DPT).
21
Page 23

7 PLUS functions
General information
Alarm on = minute sign ( ´ ) displayed above the last depth digit in the sub-function.
Alarm off = no minute sign ( ´ ) displayed.
The alarms will be triggered, if the actual depth becomes less (shallow alarm), or more
(depth alarm), than the set depth value.
The alarm is audible (signal) and visual (main and sub-function flashes).
When a triggered alarm has been silenced, it will only be triggered again if the selected
depth value differs by +/-2m (6 ft)
If a different page than DEPTH is shown when the alarm is triggered, the set alarm
function will automatically be shown flashing, until you silence or turn off the alarm.
The instrument will then automatically return to the previous page.
Loss of signal. If there are no depth echoes for 3 seconds, the display indicates 3
dotted lines ( --- ) until a new echo is received.
7.1 DEPTH main-function
Depth from the water surface or the keel depending on calibration setting (See 12.2.3,
C22).
Unit available in meters (m), feet (FT) or fathoms (FA).
(See 12.2.2, C21).
7.2 DEPTH sub-functions
7.2.1 LIGHT CONTROL
The instrument uses red back lighting for the display and the 5
push-buttons. The lighting can be set at 4 different levels.
To change light level, press SET, The flashing text (Lit OFF) will be displayed and the
display will be lit momentarily.
To select between the 4 light levels, Press PLUS: LOW, MID, MAX and OFF. To lock
the selected level press SET.
The selected light level will be copied to all FI-30 instruments connected to the system.
When the lighting is on, it is not possible to reduce or turn off the lighting on an
individual instrument.
22
Page 24

7.2.2 BATTERY (BAT)
Battery voltage at the Server.
7.2.3 SHALLOW ALARM (SHA)
Depth at which point audible and visual alarms will be triggered, if
the actual depth becomes less than the set value. (See 7.4).
7.2.4 DEPTH ALARM (DEA)
Depth at which point audible and visual alarms will be triggered, if
the actual depth becomes more than the set value. (See 7.4).
7.2.5 ANCHOR ALARM
To set an anchor alarm, set the shallow (SHA) alarm to actual depth minus 1,5 m / 5
FT then set a value for the depth (DEA) alarm to actual value plus 1.5 m / 5 FT.
The logic is that when you are at anchor, the alarm will warn you if the boat is drifting
towards deeper or shallower water.
7.2.6 HEADING (HDT/HDM)
Compass heading, heading true (HDT) or heading magnetic
(HDM). (See 12.3.11 C40).
7.2.7 TEMPERATURE (TMP)
Water temperature. Units available in Celsius ( C ) or Fahrenheit
(F). (See 12.2.4, C23 and C24)
7.2.8 UNIVERSAL TIME (UTC)
Time in hr/min/sec. This function will only be displayed if a GPS
receiver is connected to the system. The (UTC) is indicated by a (U) after the time.
To set your local time (L) zone from (UTC), press SET and the first digit flashes.
If you want to add to (UTC), select underlining character ( _ ).
If you want to reduce from (UTC),
select minus sign ( - ) by pressing PLUS.
To set the time zone value press PAGE, MINUS and PLUS as required.
To store the zone value press SET.
Example: In United Kingdom the local time zone setting should be ( _ 00h ZON) during
winter time, and plus one hour ( _01h ZON) in the summer time.
7.2.9 BOAT SPEED (BSP/unit)
Boat speed through the water. Select the unit from knots (KT),
km/h (Kh) or miles/h (Mh). (See 12.1.2, C11). The text alternates
between (BSP) and the selected (unit).
23
Page 25

7.3 Remote Control (REM)
The FI-30 Multi Control can be used to remote control other
digital FI-30 instruments.
All digital FI-30 instruments has their unique ID number on the
Nexus Network. At power up the ID numbers are displayed for a
short time.
The instrument to the right has ID number 16 (version number is
2.0)
Note the ID numbers for the instrument you want to remote control.
Press SET and the selected ID number is flashing.
Select the ID number for the instrument you want to control with
PLUS and MINUS as required. Press SET to start remote
control.
Four push button symbols are displayed to tell you are in remote
mode. The display of the instrument you selected will flash once
and then the PAGE symbol of that instrument will continue to flash
to tell it is remote controlled.
Now you can use the four push buttons:
To exit the remote control page, press CLEAR:
24
Page 26

7.4 Set and turn on shallow (SHA) and depth alarm (DEA)
Select shallow (SHA) or depth (DEA) alarm, press SET.
The first digit in the previous value flashes.
If you want to reset the previous value to zero (0), Press CLEAR.
To select desired depth press MINUS, PLUS and PAGE as required.
Press SET to lock the selected value.
By this last press on SET, you have turned on the selected alarm function, which is
indicated by the minute sign ( ´ ) above the last depth digit in the sub-function.
7.5 Set and turn on anchor alarm (ANC)
Select anchor alarm (ANC), press SET.
The first digit flashes.
The instrument will suggest a value for the shallow (SHA) alarm (actual depth minus
1.5 m / 5 FT).
To store the value press SET, or select your own depth as in 7.3.
The minute sign ( ´ ) is shown above the last depth digit in the sub-function.
The instrument will suggest a value for the depth (DEA) alarm (actual depth plus 1.5 m
/ 5 FT).
To store the value press SET, or select your own depth as in 7.3.
The minute sign ( ´ ) is shown above the last depth digit in the sub-function.
7.6 Clear an alarm value
Select the alarm function to be cleared, press SET.
The first digit flashes.
To clear the alarm, press CLEAR. All digits are set to zero (0).
Press SET to lock the function.
7.7 Silencing an alarm
To silence a triggered alarm that sounds and flashes, press ANY button.
The sound is silenced and the flashing stops.
The alarm is only triggered again if the selected depth value is exceeded (shallower or
deeper) by 2 m (6 feet).
7.8 Turning off / on an alarm
Select the alarm function to be turned off / on.
To turn the alarm off / on, press CLEAR.
The minute sign ( ´ ) disappears / appears.
25
Page 27

8 NAVIGATION functions
8.1 NAVIGATION main-function
Heading 000° to 359°.
Heading true (HT) or heading magnetic (HM) can be displayed if
the compass transducer is connected. (See 12.3.11 C40)
If a navigator is connected, course over ground (CG) can be
selected instead of compass heading. (See 12.6.10, C94).
Note! This page can either be on or off. As a factory setting this page is
automatically on if a Compass transducer or GPS is connected.
In the set up, you can select this page to be on, off or automatic on. See
chapter: 12.3.2
8.2 NAVIGATION sub-functions
8.2.1 STEER REFERENCE (Pilot OFF)
Displays the selected steer reference function. This function also
controls what is shown on the optional analogue steer pilot
instrument (Art No 22115-02). Steer reference can be selected
from 5 alternatives. (See 8.3)
8.2.2 STEER VALUE (STR)
Displays steer value for the selected steer reference function (See
8.3 and 9.3).
8.2.3 (SOG) and (COG)
Speed over ground (SOG) and course over ground (COG).
Alternating function. To stop alternating, press SET. To restart
alternating, press SET again.
8.2.4 (BTW) and (DTW)
Bearing to waypoint (BTW) and distance to waypoint (DTW):For
function explanation, see drawing inside cover page.
To display this function, you must navigate towards a waypoint.
Alternating function. To stop alternating, press SET. To restart
alternating, press SET again.
8.2.5 LATITUDE and LONGITUDE (POS)
Displays position in selected format. Select format from
degrees/minutes and 100:th of a minute (indicated by decimal ( . )
and minute ( ´ ) signs) or from format degrees/minutes/seconds
(indicated by minute ( ´ ) sign only). (See 12.3.9, C38).
Alternating function.
26
Page 28

To stop alternating, press SET. To restart alternating, press SET again.
8.2.6 SET and DRIFT
Direction of current (SET) and speed of current (DRF).
Alternating function. To stop alternating, press SET.
To restart alternating, press SET again.
8.2.7 (CMG) and (DMG)
Course made good (CMG) and distance made good (DMG)
The function is based on the principle of dead reckoning.
The function keeps track of the boats way through the water and
displays course and distance in a straight line from the start
position.
Locate and mark your position and reset CMG/DMG. Get
underway.
To find your new position, plot the course and distance on your
sea chart.
The function starts at power on.
To reset (CMG/DMG), press CLEAR.
When the MOB button is pressed it temporarily resets the
CMG/DMG function.
Alternating function. To stop alternating, press SET.
To restart alternating, press SET again.
8.2.8 WAYPOINT CLOSURE VELOCITY (WCV)
Displays the speed over ground towards the waypoint in (KTS),
(Km) or (Mh), (see 12.1.2, C11).
The text alternates between (WCV) and the selected (unit).
8.2.9 CROSS TRACK ERROR (XTE)
Distance in nautical miles (NM) to desired track.
To display this function, you must navigate towards a waypoint.
Your boat is the ”triangle” symbol and the desired track line is
represented by the ”3 vertical lines”. The ”triangle” symbol will tell
you on which side of the desired track you are. You should aim to
steer your boat so that the display readout is 0.00 NM, which
means you are on the desired track.
27
Page 29

8.3 Steer reference (Pilot)
The sub-function (Pilot) is intended to be used together with the optional analogue
instrument steer pilot to assist the helmsman to keep the desired heading.
The powerful combination of the Multi Control instrument together with the
analogue steer pilot actually offers you 6 functions.
Compass steering: (MEM)
1. Compass steering, using the 1 memory.
2. Headers and lifters, using the 2 memories and trim button. (See 9.3)
Wind steering: (AWA)
3. Close hauled indicator, ex. 35°
4. Down wind indicator, ex. 175°
Waypoint steering:
5. Bearing To waypoint (BTW)
6. Course To Steer (CTS), including set and drift
When a steer reference has been selected the analogue steer pilot instrument is
immediately activated. It starts to indicate the difference between desired and actual
heading or angle. The logic is to keep the steer pilot instrument needle straight up
pointing at zero (0) to stay on the set heading.
From analogue steer pilot instrument version 2.0, (MEM) and (BTW) is functioning with
COG (if navigator connected) even if a compass is not installed . The analogue read
out will start at speed above 4KTS and stop below 2 KTS.
If you do not have the analogue steer pilot instrument, you can still use the function, if
you display the selected steer reference heading (STR) in the sub-function and
compare it with the actual compass heading in the main-function.
A FI-30 autopilot can not be activated from the steer reference function. But when the
FI-30 autopilot has been activated in compass or wind mode it is possible to alter the
autopilots heading from the (MEM) and (AWA) functions.
The last used steer reference function will be stored in memory and automatically
activated at power on. (Available Server version 2.6)
28
Page 30

8.3.1 Overview of steer reference (Pilot)
Steer reference function Reference Text on
type display
(MEM)=Compass heading Manual
stored in 1 or 2
memories (TAC)
(BTW)=Bearing to waypoint Automatic
(CTS)=Course to steer to Automatic
waypoint, corrected
for drift and current
(AWA)=Apparent wind angle Manual
(OFF)=Steer pilot off
When any steer reference function is activated, the text on the display will be copied
and shown on all Multi Control instruments in your Nexus Network.
8.3.2 Steer reference (MEM)
This function requires the FI-30 or NMEA compass transducer.
The function is semi automatic, i.e. when activated, present
compass heading is copied to memory. You can later change the value manually.
Select sub-function (Pilot), press SET.
The text (OFF) or the last selected steer reference function flashes.
To select steer reference (MEM), press PLUS.
To activate the function, press SET. MEM is shown on the display.
The sub-function (STR) automatically displays the stored (MEM) value.
The text (MEM) and (STR) is alternating.
If you want to change the steer reference value, press SET.
The first digit flashes.
To set the new value press MINUS, PLUS and PAGE as required.
To store the value, press SET.
29
Page 31

Note: Steer reference heading value (MEM) can also be selected directly from the
optional trim button, without first selecting (MEM) in (Pilot OFF) function.
(Available from Server software version 1.9.)
8.3.3 Steer reference (BTW)
This function requires the FI-30 or NMEA compass transducer
and a NMEA navigator.
When selected, the function displays (BTW) and the analogue steer pilot instrument
displays the difference between the compass heading and the bearing to waypoint
(BTW).
The function can only be displayed if the connected navigator is navigating towards a
waypoint.
Since the displayed value it is controlled by the navigator, the value can not be altered.
Select sub-function (Pilot), press SET.
The text (OFF) or the last selected steer reference function flashes.
To select steer reference (BTW), press PLUS.
To activate the function, press SET. WP is shown on the display.
The sub-function (STR) automatically displays the stored (BTW) value.
30
Page 32

8.3.4 Steer reference (CTS)
This function requires log transducer, FI-30 or NMEA compass
transducer , NMEA navigator.
When selected the function displays (CTS) and the analogue steer pilot instrument
displays the difference between the compass heading and the bearing to waypoint
(CTS) including set and drift.
The function can only be displayed if the connected navigator is navigating towards a
waypoint.
Since the displayed value it is controlled by the navigator, the value can not be altered.
The function is compensated for set and drift, by using the parameters compass
heading, boat speed through the water, course and speed over ground (COG/SOG)
and bearing to waypoint (BTW).
Select sub-function (Pilot), press SET.
The text (OFF) or the last selected steer reference function flashes.
To select steer reference (CTS), press PLUS.
To store the function, press SET. MEM WP is lit on the display.
The sub-function (STR) automatically displays the stored (CTS) value.
The text (CTS) and (STR) is alternating.
The function is invaluable when you want to sail the shortest distance to a waypoint.
8.3.5 Steer reference (AWA)
This function requires the FI-30 or NMEA wind transducer.
The function is semi automatic, i.e. when activated, present wind
angle is copied to memory. You can also change the value manually.
The function displays the deviation from a set wind angle value and can be used as a
”close hauled” tack indicator, or show an enlarged ”picture” of the running angle.
Select sub-function (Pilot), press SET.
The text (OFF) or the last selected steer reference function flashes.
To select steer reference (AWA), press PLUS.
To store the function, press SET. WIND is shown on the display.
The sub-function (STR) automatically displays the stored (AWA) value.
The text (AWA) and (STR) is alternating.
If you want to change the steer reference value, press SET.
The first digit flashes.
31
Page 33

The underlining sign ( _ ) = starboard side. The minus sign ( - ) = port side.
To select value, press MINUS, PLUS and PAGE as required.
To store the value, press SET.
When the steer reference function (AWA) is used together with the analogue steer
pilot instrument, you can display an enlarged ”picture” of the tacking or run angle. Put
simply, you ”expand” the wind angle.
Use the analogue steer pilot as a ”close hauled” instrument.
Example: You have selected 35° starboard side (35° |- STR) as your tacking angle.
When the needle on the analogue steer pilot instrument points straight up to zero (0),
you steer at the selected 35° wind angle.
You can of course also use the (AWA) function when running down wind, to keep a
selected value for the run angle and/or to warn for a gibe.
Example: You have selected 160° port side (160° -| STR) as your running angle.
When the needle on the analogue steer pilot instrument points to 15° port side you are
at 145°. When the needle is at zero (0) you are at 160°. When the needle points 15°
starboard you are at 175°.
At night, when you can not see the wind shifts, the use of the (AWA) function together
with the analogue steer pilot is a very helpful.
This is a dynamite function that allows you to ”expand” the wind angles!!!
When a FI-30 Autopilot is activated in wind mode, the (AWA) function on the Multi
Control instrument can be used to perform an automatic tack.
The minus sign ( - ) in front of the wind angle value = port side.
The underlining sign ( _ ) in front of the wind angle value = starboard side.
Simply change the value of the digit in front of the wind angle, and the FI-30 Autopilot
will gibe to the opposite tack.
32
Page 34

9 Wind functions
9.1 WIND Main-function
Apparent wind angle (AWA), true wind angle (TWA) 000° - 359°,
apparent wind speed (AWS) or true wind speed (TWS):
Note! This page can either be on or off. As a factory setting this page
is automatically on if a Compass transducer or GPS is connected.
In the set up, you can select this page to be on, off or automatic on.
See chapter: 12.5.2
The main-function WIND, allows you to display wind angle or wind speed, true or
apparent. The wind angle is indicated by a symbol to the right of the wind angle value:
= Wind from port side.
= Wind from starboard side.
The type of wind true or apparent, is indicated by a letter:
= Apparent wind .
= True wind.
The selection of apparent (AWA) or true (TWA) wind angle in the main function also
controls what is displayed on the optional analogue wind instrument .
When the instrument is delivered, the factory setting for the main function is apparent
wind angle (AWA). (See 0, C51 and C63).
9.2 WIND Sub-functions
9.2.1 STEER REFERENCE (Pilot OFF)
Displays the selected steer reference function. This function also
controls what is shown on the optional analogue steer pilot
instrument. Steer reference can be selected from 5 alternatives.
(See 8.3)
9.2.2 STEER VALUE (STR)
Displays steer value for the selected steer reference function (See
8.3).
33
Page 35

9.2.3 APPARENT WIND SPEED (AWS)
Units displayed in m/s (m/s), knots (KTS) or Beaufort (BF),
(see 0, C53). The function alternates between (AWS) and the
selected (units).
9.2.4 TRUE WIND ANGLE (TWA)
This function requires a log transducer. The complimenting
function to what is displayed in the main function is displayed.
If the main function is set to display apparent wind angle (AWA), the true wind angle
(TWA) will be displayed here.
If the main-function is set to display true wind angle (TWA), the apparent wind angle
(AWA) will be displayed here.
If the main-function is set to display apparent wind speed (AWS), apparent wind angle
(AWA) will be displayed here.
If the main-function is set to display true wind speed (TWS), true wind angle (TWA) will
be displayed here.
9.2.5 TRUE WIND SPEED TWS
This function requires a log transducer. Displayed in m/s
(m/s), knots (KTS) or Beaufort (BF). (See 0, C53).The text
alternates between (TWS) and the selected (unit)
9.2.6 VELOCITY MADE GOOD (VMG)
Displays speed into the wind or speed running with the wind in
(KTS), (Km) or (Mh), (see 12.1.2, C11). See drawing.
The text alternates between (VMG) and the selected (unit).
9.2.7 TACTICAL FUNCTION (TAC)
Displays heading memory, one for starboard and one for port
tack. (For function explanation, see 9.3).
34
Page 36

9.2.8 GEOGRAPHIC WIND DIRECTION
This function requires a compass transducer. Displays the
direction in 000° to 359° and the each cardinal point abbreviation
as shown:
000.0° = N
022.5° = NNE
045.0° = NE
067.5° = ENE
090.0° = E
112.5° = ESE
135.0° = SE
157.5° = SSE
180.0° = S
202.5° = SSW
225.0° = SW
247.5° = WSW
270.0° = W
292.5° = WNW
315.0° = NW
337.5° = NNW
If magnetic heading is selected, geographic wind direction will also be magnetic
direction. (See 12.3.4, C33)
35
Page 37

9.3 Tactical function
This function requires a compass transducer and displays course memory. One for
starboard and one for port tack.
To fully use the tactical function it is recommended to install the optional trim button
and analogue steer pilot instrument. The trim button is usually installed close to the
steering position. Many prefer to install one trim button on each side of the boat, that is
one for each tack. (For installation of trim button, see Server manual). Your apparent
tack angle is assumed to be constant, in that your magnetic heading will be changed
compared to the wind, that is you will be changing your heading due to the wind shifts.
The tactical function will give you a fast and exact information about any wind shift
compared to the magnetic heading.
Select sub-function (TAC).
When you have maximum ”lift”, press SET (or the trim button) to store the value. When
the wind ”heads” more than 5-10* it is time to tack.
Follow the same procedure on the new leg. The reference value for the selected tack,
will be changed every time you press SET (or the trim button). When you tack, the
reference value of the last leg will automatically be displayed.
If the optional analogue steer pilot instrument connected, select sub-function pilot
(MEM), as steer reference (See 8.3.2).
36
Page 38

The deviation from selected course will be displayed on the analogue steer pilot
instrument.
If you do not have the optional trim button or analogue steer pilot connected, we
suggest you move the sub-function (TAC) to the
NAVIGATE page. Now you can display both the heading and the tactical reference
(TAC) at the same time.
Remember to turn off the off course alarm. To turn off the off course alarm, set C32 to
(00 ), (See 12.3.3, C32).
10 Man over board (MOB) function
This function will guide you back to the position where the man
over board (MOB) button was pressed.
This function requires either a navigator (a NMEA navigator can
be used) or a speed and compass transducer as well as a man
over board (MOB) button. (See Server Manual).
If only a compass and a speed transducer is connected, dead reckoning (MOB) will be
displayed on both the Multi Control and the SPEED Log instruments. Dead reckoning
(MOB) is also a very useful information, since a person in the water will drift almost as
fast as the boat.
If a navigator, a compass and a log transducer is connected, dead reckoning (MOB)
will be performed and displayed in the SPEED Log instrument. At the same time the
Multi Control instrument will display (MOB) relative position stored in memory when the
(MOB) button was activated. A position in latitude and longitude is more important for
the sea rescue service.
The (MOB) position is automatically stored in waypoint number 99, and over writes any
earlier stored position.
To activate the MOB function, press the (MOB) button.
A fixed alarm signal will sound briefly to alert the crew. The text (MOB) flashes.
Off course error will be displayed in the main-function.
= steer to starboard. = steer to port.
37
Page 39

Distance to the MOB position will be displayed in the sub-function.
All you have to do is to keep calm and steer the boat in the indicated direction and
distance to pick up your wet crew member.
To reset the (MOB) function, press CLEAR.
The earlier calculated course (CMG) and the distance made good (DMG) is not
affected by the (MOB) function.
If the analogue steer pilot instrument is connected the analogue instrument will
indicate (MOB) course difference with priority to GPS position over dead reckoning
position.
Note: It is wise to practice this manoeuvre with the crew. Everyone in the crew
should be aware of the (MOB) routine. When you practice, it can be thoughtful to
use a fender instead of a crew member!!!
11 Customise your display
All sub-functions are organised in a list under the main-function. The first location in
the sub-function list is an empty display. You can have your favourite sub-function
moved in the same sub-function list, or copied and locked to any other page.
11.1 Move and lock a sub-function
Example: In SPEED page, move and lock the sub-function depth (DPT) to the top of
the sub-function list.
Select the SPEED page and find the sub-function depth (DPT). Press PAGE and SET
together.
All digits flash.
To move and lock the sub-function press SET.
Each time the SPEED page is selected, the sub-function (DPT) will be displayed at the
top of the sub-function list.
11.2 Copy and lock a sub-function
Example: Copy and lock the sub-function true wind speed (TWS) from WIND page to
SPEED page.
Select WIND page and find the sub-function (TWS).
Press PAGE and SET together.
All digits flash.
To move and copy to SPEED page, press PAGE.
To lock the function, press SET.
38
Page 40

Each time the SPEED page is selected,
the sub-function (TWS) will be displayed.
The copied sub-function remains in its original location. It is only copied to a second
location, where it takes the place of the empty sub-function in the list.
Note: The sub-function damping (SEA) should not be moved, to avoid
misunderstanding.
11.3 Select power on function
The last selected combination of page and sub-functions according to your selection in
11.1 is the first page the instrument will display at power up.
11.4 Cancel a moved or locked sub-function
Example: To cancel the previous moved sub-function true wind speed (TWS) from
SPEED page.
Select the new combination, SPEED page and sub-function (TWS).
Press PAGE and SET together.
All digits flash.
To cancel the moved sub-function, press CLEAR.
The sub-function is cancelled and the main-function still flashes.
To return the to the original display, press SET.
11.5 Temporary locking of alternating functions
Some functions will alternate automatically between two functions.
Example bearing to waypoint (BTW) and distance to waypoint (DTW).
To stop alternating, press SET.
To continue alternating, press SET again.
39
Page 41

12 Calibration
To get the most out of your Nexus Network, it is important to carefully calibrate the
Network. The calibration values are stored in a non volatile memory.
To access calibration mode, press and hold SET more than 2 seconds.
To select a calibration code, press MINUS, PLUS and PAGE as required.
To return to normal mode, press SET when the text return (RET) is displayed.
The different calibration routines are divided into five groups:
C10 - calibration of SPEED
C20 - calibration of DEPTH
C30 - calibration of NAVIGATE
C50 - calibration of WIND
C70 - calibration of Network and NMEA settings
To change a calibration value, press SET.
To select calibration value, press MINUS, PLUS and PAGE as required.
To lock the selected value, press SET
12.1 Calibration of speed C10
12.1.1 C10 Return (RET)
To return to normal mode, press SET.
12.1.2 C11 (Unit KTS)
Unit for speed. Knots (KTS), km/h (K/h) or miles/h (m/h).
12.1.3 C12 (1.25 CAL)
Calibration value for speed and distance (1.00 - 1.99).
Drive the boat a measured distance at normal speed.
Compare the distance with the trip counter.
Calculate the value with the following formula:
True distance from the sea chart : T
Log trip counter distance: L
The current calibration value: C
New calibration value. N
If you suspect a current in the water, drive the boat in both directions and divide trip
counter distance by 2.
40
Page 42

12.1.4 C13 DAMPING (SEA)
Damping of indicated boat speed through the water. Controls
the response time of speed changes.
To change damping, press SET.
To select damping level, press PLUS and select from:
(LOW) 1 sec, (MED) 5 sec and (MAX) 22 sec.
To store the value, press SET.
Default value is (LOW), for use in calm sea. But if the sea is rough, you may want to
”stabilise” the readout on the display, then select (MID) or (MAX). Damping is set
separately for each instrument.
12.2 C20, calibration of depth
12.2.1 C20 (RET)
To return to normal mode, press SET.
12.2.2 C21 (Unit m)
Unit for depth. Metre (m), feet (Ft) or fathoms (FA).
12.2.3 C22 ( - 00.0 ADJ)
Calibration of the depth transducer position.
This option is used to select whether the displayed water depth is measured from the
water level or the keel.
To measure from the keel, use the minus ( - ) sign.
Example: ( - 01.2 ADJ). The distance from the transducer to the keel is 1.2 m
To measure from the water surface, use the underlining character
( _ ) sign.
Example: ( _ 00.4 ADJ). The distance from the transducer to the water surface is 0.4
m.
The selected value will be subtracted or added from the measured depth.
12.2.4 C23 (Unit°C)
Unit for temperature. Celsius (C) or Fahrenheit (F).
12.2.5 C24 (0°C TMP)
Value for compensation of the temperature.
To add, use underlining character ( _ ) ahead of the digit ( _1 TMP).
To subtract, use minus character ( - ) ahead of the digit (-1 TMP).
41
Page 43

12.3 C30, calibration of navigation
12.3.1 C30 (RET)
To return to the normal mode, press SET.
12.3.2 C31 (PAGE ATO)
This setting allows you to display the Navigate page or not.
PAGE ATO Page automatically on if Compass transducer or
GPS is connected
PAGE ON Page is always on
PAGE OFF Page is always off
12.3.3 C32 (00° OCA)
Off Course Alarm. Can be set between 00°and 99°
(00°) = Alarm is turned off.
12.3.4 C33 (00.0 VAR)
Magnetic variation. Maximum +/- 99.9°.
Easterly variation = underlining ( _ ) sign.
Westerly variation = minus ( - ) sign.
The local magnetic variation is usually printed in the sea chart.
12.3.5 C34 (Auto DEV)
Automatic compass deviation, (see 12.4.1).
12.3.6 C35 (Auto CHK)
Check of automatic compass deviation, (see 12.4.2).
12.3.7 C36 (Auto CLR)
Clear automatic compass deviation memory, (see 12.4.3).
12.3.8 C37 (000°ADJ)
Compass transducer misalignment correction, (see 12.4.4).
12.3.9 C38 (OFF SEC)
Format of position in latitude and longitude.
(OFF) = Position in degrees, minutes and 100:th of a minute.
Indicated by the sign ( . ) after the minute.
(ON) = Position in degrees, minutes and seconds.
No sign ( . ) after the minute.
12.3.10 C39 (Pilot SEA)
Damping for the optional analogue steer pilot instrument.
LOW = 1.3 sec, MID = 2.8 sec. and MAX = 11 sec.
(Available for analogue steer pilot instruments, from version 1.3).
42
Page 44

12.3.11 C40 (OFF MAG)
(Available from Multi version 2.0)
(ON) = All headings and bearings will be magnetic.
(OFF) = All headings and bearings will be true.
Note a: In the (Goto WP) function, the bearing for every leg will always be
displayed as true bearing.
Note b: The setting is only affects the independent Multi Control instrument in
which is set.
12.3.12 C41 DAMPING (SEA)
Damping of compass heading.
Controls the response time of heading changes.
To change damping, press SET.
To select damping level, press PLUS and select from:
(LOW) 1 sec, (MID) 5 sec and (MAX) 22 sec.
To store the selected value, press SET.
Default value is (LOW), for use in calm sea. But if the sea is rough, you may want to
”stabilise” the readout on the display, then select MID or (MAX). Damping is set
separately for each instrument.
12.4 Compass calibration
12.4.1 Automatic compass deviation compensation (Auto DEV)
(Auto DEV) is performed by driving the boat in a circle up to 1¼ turn, so that the
magnetic deviation can be measured, and by that compensated.
Select calibration code C33 (Auto DEV).
Drive the boat in a circle for 1 1/4 turn in calm water. When you start the circle
manoeuvre, press SET.
The un-deviated compass course will be shown in the display as you turn. Complete
the circle up to 1 ¼ turn.
When the manoeuvre is ready, press SET to store the deviation value.
If the deviation is corrected (Auto DEV) will be displayed.
If the deviation is not corrected, an error message will be displayed.
To verify the automatic compass deviation, perform an automatic compass check
(Auto CHK), (see 12.4.2).
43
Page 45

Note: You will get the best result in calm water with a smooth turn on the
steering wheel independently of how the circle is performed. When activated,
you can stop the automatic compass deviation at any time with a press on
CLEAR.
12.4.2 Automatic compass deviation check (Auto CHK)
(Auto CHK) is done by driving the boat in a circle up to 1 ¼ turn,
after (Auto DEV) is performed. The result will be compared with
(Auto DEV). If the deviation is less than 1,5*, the average value
from the comparison between (Auto DEV) and (Auto CHK) will
be stored.
If the check is OK, (Auto CHK) will be displayed.
If not an error message will be displayed.
Select automatic compass check (Auto CHK), press SET and repeat the same circle
manoeuvre as described in the (Auto DEV) routine.
Note: As soon as you place any kind of ferrous items close to the compass, the
(Auto DEV) / (Auto CHK) routines should be repeated. So if you have packed your
boat for the vacation, think about where you place ferrous items in relation to the
compass transducer.
12.4.3 Cancel earlier performed compass deviation (Auto CLR)
To cancel earlier (Auto DEV), press SET.
12.4.4 Compass misalignment correction (Adj)
Compass transducer misalignment correction or the so called ”A-fault”.
Can be set between 000°and 359°. Allows 180° reversed mounting if needed. Never
mount the transducer in a 90° position relative to the boats fore-aft line.
To check the transducer position, sail/drive your boat in a straight line towards two
visible objects in a line. If the actual heading taken from the sea chart is 330° and the
compass displays 335°, then set calibration code C36 value to 360° - 5° = 355°.
44
Page 46

12.5 C50, calibration of wind
12.5.1 C50 (RET)
To return to the normal mode, press SET.
12.5.2 C51 (PAGE ATO)
This setting allows you to display the Navigate page or not.
PAGE ATO Page automatically on if Compass transducer or
GPS is connected
PAGE ON Page is always on
PAGE OFF Page is always off
12.5.3 C52 (OFF TWA)
Select true (TWA)or the apparent wind angle (AWA) as main-function under WIND.
The optional analogue wind instrument will display the same selection. All Multi Control
instruments which have the calibration code C63 set to (WIA) will display what is
selected in C51.
C51 (OFF) = Apparent wind angle displayed.
C51 (ON) = True wind angle displayed.
12.5.4 C53 (Unit m/s)
Unit for wind speed. Metre/second (m/s), knots (KTS) or Beaufort (BF).
12.5.5 C54 (1.50 CAL)
Do not change this factory setting.
12.5.6 C55 (000° ADJ)
Mast top unit misalignment adjust value or the so called ”A-fault”, makes it possible to
choose any horizontal angle.
Example: If the wind angle is +4° when you sail/drive the boat straight into the wind.
Set the calibration channel C54 to 356°.
12.5.7 C56-C63 Wind calibration values
In channels C55 to C62 you set the calibration values for the mast top unit. Each mast
top unit is individually calibrated for best accuracy.
See the separate wind calibration certificate supplied with each mast top unit. Each of
the inter-cardinal directions are calibrated:
C55 (000° 000)
C56 (045° 045)
C57 (090° 090)
C58 (135° 135) Set the calibration values according
C59 (180° 180) to the calibration certificate.
C60 (225° 225)
C61 (270° 270)
C62 (315° 315)
45
Page 47

12.5.8 C64 (WIA)
Select from 5 functions. (WIA) is the factory setting.
Select the function to be displayed as main-function under WIND.
The optional analogue wind instrument will display the same selection.
Select from 5 functions. (WIA) is the factory setting.
If the selected main-function is an angle, the sub-function will show the complimenting
angle, e.g. if (AWA) is selected as main-function, (TWA) will be shown as sub-function
and vice versa.
If the selected main-function is a wind speed, the sub-function will show the
corresponding angle, e.g. if (AWS) is selected, (AWA) will be shown as the subfunction and vice versa for (TWS) and (TWA).
(WIA): True (TWA) or apparent wind angle (AWA).
Depending on what is set in C51, (ON = True, OFF = Apparent).
(AWA): Will display apparent wind angle (AWA) in this instrument independent of what
is set in C51.
(TWA): Will display true wind angle (TWA) in this instrument independent of what is
set in C51.
(AWS): Will display apparent wind speed (AWS) in this instrument independent of
what is set in C51.
The letters (AW) will be displayed to the right of the wind speed.
(TWS): Will display true wind speed (TWS) in this instrument independent of what is
set in C51.
The letters (TW) will be displayed to the right of the wind speed value.
12.5.9 C65 DAMPING (SEA)
Damping of wind information. Controls the response time of
wind changes. To change damping, press SET. To select
damping level, press PLUS and select from: LOW) 1 sec,
(MED) 5 sec and (MAX) 22 sec. To store the selected value, press SET.
Factory value is (LOW), for use in calm sea. But if the sea is rough, you may want to
”stabilise” the readout on the display, then select MID or (MAX). Damping is set
separately for each instrument.
46
Page 48

12.6 C70, calibration of Network and NMEA
When calibration code C70 is selected, the LCD arrows for all functions will be
displayed
12.6.1 C70 (RET)
To return to the normal mode, press SET.
12.6.2 C71 (OFF KEY)
(On) = Sound when push buttons are pressed. (OFF) = no sound.
12.6.3 C72 (d0 SEA)
Damping of speed and course over ground (SOG/COG), affecting the complete Nexus
Network and NMEA output.
d0 = no damping. d1 = 2 sec, d2 = 5 sec, d3 = 10 sec, d4 = 20 sec, d5 = 40 sec,
d6 = 1.20 min, d7 = 2.40 min, d8 = 5 min and d9 = 10 min.
12.6.4 C73 (OFF BSP)
(OFF) = FI-30 log transducer. (On) = NMEA log transducer.
If you want to use a NMEA transducer (connected to the NMEA input, you have to set
C73 to On. The Server will then transmit this information on the Nexus Network to all
connected instruments.
After you have changed this setting, you have to restart the system
12.6.5 C74 (OFF DEP)
(OFF) = FI-30 depth transducer. (On) = NMEA depth transducer.
If you want to use a NMEA transducer (connected to the NMEA input, you have to set
C74 to On. The Server will then transmit this information on the Nexus Network to all
connected instruments.
After you have changed this setting, you have to restart the system
12.6.6 C75 (OFF CMP)
(OFF) = FI-30 compass transducer. (On) = NMEA compass transducer.
If you want to use a NMEA transducer (connected to the NMEA input, you have to set
C75 to On. The Server will then transmit this information on the Nexus Network to all
connected instruments.
After you have changed this setting, you have to restart the system
47
Page 49

12.6.7 C76 (OFF WND)
(OFF) = FI-30 wind transducer. (On) = NMEA wind transducer.
If you want to use a NMEA transducer (connected to the NMEA input, you have to set
C76 to On. The Server will then transmit this information on the Nexus Network to all
connected instruments.
After you have changed this setting, you have to restart the system
12.6.8 C77 to C92
Contains 16 NMEA slots. (See 12.7.2)
12.6.9 C93 (d4 NME)
Damping for NMEA OUT from Server.
Only compass heading (HT/HM) and boat speed through water (BSP) can be damped
with this code.
d0 = 0.5 sec, d2 =1 sec, d3 = 2.5 sec, d4 = 5 sec, d5 = 10 sec,
d6 = 20 sec, d7 = .40 sec, d8 = 80 sec and d9 = 160 sec.
12.6.10 C94 (OFF COG)
Select type of heading transducer, compass or navigator (COG), to be displayed as
main-function under NAVIGATE.
When COG is available (FI-30 or NMEA), and no compass transducer is connected,
you can set C94 to (ON), COG will also be used to compute TWD (true wind direction)
12.6.11 C95 (OFF SOG)
Select speed transducer to be displayed as main-function under SPEED.
(OFF) = Boat speed through the water from log transducer.
(ON) = Speed Over Ground (SOG) from navigator.
48
Page 50

12.7 NMEA
12.7.1 Transmit NMEA sentences OUT from Server
Calibration code C77 to C92 contains 16 NMEA slots
The Server supports 29 different NMEA sentences.
This means you can select up to 16 of the 29 available NMEA sentences.
The Nexus Network uses the NMEA 0183 sentences, version 1.5 and 2.0. The number
in brackets, example (C79), is the calibration code for the factory slot number given to
the NMEA sentence.
0 ( — ) No out signal
1 (APB) Autopilot B
2 (BOD) Bearing original destination
3 (BWC) Bearing and distance to waypoint
4 (BWR) Bearing and distance, dead reckoning
5 (C77) (DBT) Depth measured from the transducer position
6 (DPT) Depth
7 (C78) (GLL) Geographic position
8 (GSA) DOP and active satellites
9 (C79) (GSV) Satellites in view
10 (C80) (HDM) Compass heading, magnetic.
11 (C81,89) (HDT) True heading
12 (MTW) Water temperature
13 (C82) (MWD) Wind direction and speed
14 (C88) (MWV) Apparent wind speed and angle
15 (RMB) Minimum navigation data
16 (RMC) Minimum specific GPS- and TRANSIT-data
17 (C87) (RSA) Rudder Sensor Angle
18 (RTE) Route Not implemented
19 (C83) (VDR) Set and drift
20 (C84) (VHW) Speed and course through the water
21 (VLW) Distance travelled through the water
22 (C85) (VPW) Speed relative to the wind
23 (C86) (VTG) Course Over Ground and Ground Speed.
24 (VWT) True wind speed and direction
25 (C90) (WCV) Waypoint closure velocity
26 (WPL) Waypoint location Not implemented
27 (C91) (XTE) Cross track error
28 (C92) (ZDA) Time and date
29 (ZTG) & (UTC) Time to destination or waypoint
49
Page 51

Example of NMEA sentences:
$IIAPA,A,A,00.007,L,N,V,V,145.03,M,004
$IIAPB,A,A,00.007,L,N,V,V,147.53,T,004,147.52,T,,T*29
$IIBOD,147.53,T,145.03,M,004,000
$IIBWC,101515,5912.890,N,01812.580,E,147.52,T,145.02,M,15.649,N,004
$IIBWC,,,,,,147.52,T,145.02,M,15.647,N,004
$IIBWR,101516,5912.890,N,01812.580,E,147.52,T,145.02,M,15.647,N,004
$IIDBT,293.52,f,089.47,M,048.36,F
$IIDPT,089.47,0.40
$IIGLL,5926.110,N,01756.171,E,101517,A
$IIHDM,026,M
$IIHDT,029,T
$IIMTW,19,C
$IIMWD,161.77,T,159.27,M,07.01,N,03.61,M
$IIMWV,133,R,07.03,N,A
$IIRMA,A,5926.110,N,01756.171,E,,,0.23,189.47,,,,*00
$IIRMB,A,00.007,L,000,004,5912.890,N,01812.580,E,15.647,147.52,,V*01
$IIRMC,101340,A,5926.115,N,01756.172,E,0.04,063.42,,,*06
$IIVDR,063.42,T,060.92,M,0.04,N
$IIVHW,029,T,026,M,00.00,N,00.00,K
$IIVLW,49626.59,N,,
$IIVPW,0.00,N,,
$IIVTG,063.42,T,060.93,M,0.04,N,,
$IIVWR,133,R,07.03,N,03.62,M,,
$IIVWT,133,R,07.01,N,03.61,M,,
$IIWCV,0.00,N,004
$IIWPL,5503.000,N,01013.450,E,027
$IIXTE,A,A,00.003,L,N
$IIZDA,101341,,,,
$IIZTG,101341,,004
12.7.2 Change NMEA sentences OUT from Server
Before you change any of the factory set NMEA sentences, check what NMEA
sentences can be received by your NMEA navigator.
Select the slot number for the sentence to be changed, then press SET.
To select the sentence, press MINUS or PLUS until found.
To lock the selected sentence, press SET.
One of the advantages with the Nexus Network is the very fast transmission speed of
data compared to the relatively slow NMEA standard (about 10 times faster). Therefore
we recommend that you use FURUNO instruments and transducers for better
accuracy.
50
Page 52

It takes two seconds to transmit all 16 NMEA sentences.
To double the transmission speed, select a NMEA sentence 2 times with 7 slots apart,
that is the slots should be as far away from each other as possible.
In a similar way, you can select the a sentence 4 times to make it 4 times faster.
Example: If you want to transmit the FI-30 compass heading via NMEA, to for example
an autopilot, select (HDM) for every odd slot number, C79, C81, C83 ... C93, that is 8
times which makes the speed 4 times / second. This leaves the other 8 slots with even
numbers, C78, C80, C82 ... C92 free to use for other NMEA sentences.
For connection of NMEA instruments OUT from Server, (see).
12.7.3 Receive NMEA sentences IN to Server
There are 6 different main types of NMEA sentences:
1) Position related data: Position, SOG/COG, time, and a limited amount of satellite
status if a GPS is connected.
2) Navigation data: (BTW), (DTW), (BOD), (XTE), (SET) and (DRIFT).
The Server will automatically send data to the Nexus Network. E.g.: (DRIFT), (WCV),
(TTG) and (CTS).
3) Speed data: is read only if (C73 BSP) is set to (ON). See 12.6.4
4) Depth data: is read only if (C74 DEP) is set to (ON). 12.6.5
5) Compass data: is read only if (C75 CMP) is set to (ON)12.6.6. Heading is either
(HDT) (priority) or (HDM). Magnetic variation (from Nexus Network) is added to (HDM)
but not to (HDT).
6) Wind data: angle and wind speed is read from (MWV) data, only if (C76 WND) is
set to (ON) See12.6.7. True wind angle and wind speed is calculated by Nexus, when
the boat speed (the speed of the water) is known.
The following NMEA sentences can be received IN to Server:
APA Autopilot sentence ”A”
APB Autopilot sentence ”B”
BOD Bearing original destination
BWC Bearing and distance to waypoint
BWR Bearing and distance to waypoint (old)
DBT Depth measured from the transducer position
DPT Depth
GGA Global positions fix data (GPS)
GLL Geographic position, Latitude/Longitude
GSA DOP and active satellites
GSV Satellites in view
HDM Heading, magnetic
HDT Heading, true
MTW Water temperature
RMB Minimum navigation information
51
Page 53

RMC Minimum specific GPS/transit data
WCV Waypoint closure velocity
VDR Set & drift
VHW Water speed and heading
MWV Wind speed and direction
VTG Course Over Ground and Ground Speed
XTE Cross-track-error, measured
ZDA Time & date
TBS Target boat speed
CAD Custom angular data
CFD Custom fix data
RSA Rudder Sensor Angle
For connection of NMEA instrument IN to Server, (see Server Manual).
All data (POSITION, BTW, SOG/COG, etc.) is received from one type of NMEA
sentence. If data is placed in different locations, the data will be selected from the
sentence with the highest priority.
Example I: Position is read in priority order: GGA, GLL and. RMC.
Example II: BTW/DTW is priority first with: RMB, BWC and BWR.
The transmission ID (the first two letters after “$”) is ignored by the Server. Present
position is read, after that possible latitude and longitude correction is added (C39 and
C40) before the position is sent over the Nexus Network to all instruments
52
Page 54

12.8 Special NMEA sentences
The Server can read 2 special NMEA sentences which can be send from a PC. One
contains TBS (target boat speed), the other CAD (customised angle data ) and CFD
(customised fixpoint data ). These 3 data are retransmitted on the Nexus Network and
can be displayed as a sub-function on the Multi Control instrument.
To get the sub-function TBS, select main function SPEED and the ”empty” subfunction.Then press PAGE and SET together followed by CLEAR.
To get the sub-function CAD, select main function NAVIGATE and the ”empty” subfunction.Then press PAGE and SET together followed by CLEAR.
To get the sub-function CFD, select main function WIND and the ”empty” subfunction.Then press PAGE and SET together followed by CLEAR.
Example of special NMEA-sentence:
$PSILTBS,X.X,N<CR><LF>
Knots
Target boat speed
$PSILCD1,X.X,X.X,<CR><LF>
CAD (000.0°-360.0°)
CFD (-327.67- +327.67 units)
12.8.1 Baudrate control,
It is possible to change the baudrate from 4800bps to 19200bps. To do that, a PC is
required. Note 19200 is not to be considered as NMEA since the standard states 4800.
a. The Requesting unit is allowed to transmit the message:
"$PSILBPS,19200,R,<CR><LF>"
once every 2s at nominal 4800 bps with normal NMEA start bit and stop bit settings.
This message may be received on any of the two Server ports.
b. The receiving unit (FI-30 Server) will Confirm message:
"$PSILBPS,19200,C,<CR><LF>"
and send it back on output ports to the requesting unit.
c. When the requesting unit receives the same message but with the flag set to "C"
(Confirmed), both server ports (A and B) are set to 19200bps and transmission may
start at the new baudrate. The sending unit may now stop sending the proprietary
request message since it has entered the higher baudrate. There is no way back
unless there is a power loss.
From power up, baudrate is always set to 4800 and the above procedure must be
repeated.
The receiving unit (Nexus Server) will always check for the proprietary message when
in normal baudrate, not when in high baudrate.
53
Page 55

13 Maintenance and fault finding
13.1 Maintenance
• To clean the instrument, use only mild soap solution and rinse with water.
• Do not use detergents or high pressure washing equipment.
• At least once a year, check all your connections and apply additional
silicon paste at each connection point.
• Always use the instrument cover for protection, when not in use.
• Storing transducers and instruments when not in use for longer periods: It is
advisable to remove the instruments and transducers, and store them inside the
boat or at home in room temperature, if possible.
13.2 Fault finding
Before you contact your FURUNO dealer, and to assist your dealer to give you a better
service, please check the following points and make a list of:
• All connected instrument and transducers , including their software version
numbers.
• Server software version number.
• Nexus Network data bus ID numbers for each instrument (displayed at power up).
13.2.1 General
In most cases, the reason for faults in electronic equipment is the installation or poor
connections. Therefore, always first check that:
• Installation and connection is made per instructions for instrument and
transducers, (see Server manual).
• Screw terminals are carefully tightened.
• No corrosion on any connection points.
• No loose ends in the wires causing short cuts to adjacent wires.
• Cables for damage, that no cables are squeezed or worn.
• Battery voltage is sufficient, should be at least 10V DC.
• The fuse is not blown and the circuit-breaker has not opened.
• The fuse is of the right type.
• Two instruments do not have the same ID number, (see 3.2).
54
Page 56

13.2.2 Fault - action
1. Speed and distance functions: No reading ( --- )
- C95 (COG) should be OFF, if no navigator is connected.
For more information, see manual for FI-30 Server.
Irregular values: Check the speed damping (SEA), (see 12.1.4).
2. Compass: No reading ( --- )
− C75 should be OFF, if no NMEA compass is connected.
− Make sure the (Auto DEV) routine is done correctly, (see 12.4.1)
− Make sure the transducer is not mounted upside down.
− The transducer cable should face down.
− Make sure transducer is aligned correctly, (see 12.4.4).
For more information, see manual for FI-30 Server.
Irregular values: Check the compass damping (SEA), (see 12.3.12).
Make sure there are no ferrous items close to the transducer.
3. Wind: No reading ( --- )
− C76 should be OFF, if no NMEA wind is connected.
For more information, see manual for FI-30 Server.
13.2.3 Error messages
The following error messages can appear on the display:
ERROR 2 Nexus Network is missing, check colour coded connections
ERROR 3 No data received within a given time.
ERROR 10 Range error caused by bad format e.g. 17° 70' East.
ERROR 11 Remote command that can not be performed.
ERROR 12 No response from, or missing navigator.
ERROR 13 Waypoint not defined.
ERROR 15 Functions not allowed in autopilot mode.
ERROR 16 Automatic deviation not possible due to NMEA compass selected.
ERROR 17 Automatic deviation check failed. Turn not completed, error larger
than 1,5°.
ERROR 19 The boat probably hit a wave during turn. Error larger than 1,5°.
If other error messages than the above appears on the Multi Control instrument,
contact your FURUNO dealer.
55
Page 57

14 Specifications
14.1 Technical specifications
Dimensions: Multi Control instrument: 113 x 113 x23 mm
(4.3x4.3 inch).
Server: 110 x 165 x 30 mm. (4.3x6.5x1.2 inch)
Instrument cable: 8 m (26 ft).
Power supply: 12V DC (10-16V). The instruments are polarity protected
Power
consumption at 12V: Multi Control instrument: 0.08W
with maximum lighting 0.8W.
Server: 0.2W.
Temperature range: Storage:-30°to +80°C (-22°to +176°F)
Operation: -10° to +70°C(14°to +158°F)
Weight: Multi Control instrument: 260 gram (9.17 oz).
Server: 220 gram. (7.76 oz).
Enclosure: Multi Control Instrument: Water proof
Server: Splash proof
CE approval
The products conforms to the EMC requirements for immunity and emission according
to EN 50 08-1.
14.2 Nexus Network introduction and user policy
Introduction:
The Nexus data bus is a multi talker multi receiver data bus specially designed for
marine navigation applications. It utilises the RS485 standard with up to 32 senders
and/or receivers to form a Local Area Network. Data is transmitted synchronously with
1 start-bit, 8-data-bits, 1 parity-bit, two stop-bits in 9600 baud.
User policy:
The Nexus data bus is open for new users and applications without a licence or a
licence fee. The data bus is, however, the property of the manufacturer, which means
the specification must be followed in order to protect the manufacturer’s commitments
to the Nexus data bus performance and safety.
For most PC-applications, the full duplex interface, will be a very useful tool for
monitoring real time data, to edit and store waypoints to PC-file or to Server. The
interface is supplied with a cable for connection from PC to the Server or FI-30
instruments. A 9-pole D-sub connector is connected to the RS232 port on the PC.
56
Page 58

14.3 Equipment Lists
INSTRUMENT SERIES
PART #
MODEL
000-041-864
FI-301
MULTI CONTROL
000-041-865
FI-301-SERVER
MULTI CONTROL W/SERVER
000-041-866
FI-301-SERVER/SENSOR
MULTI CONTROL W/SERVER & SENSORS
000-041-867
FI-302
SPEED
000-041-868
FI-302-SENSOR
SPEED W/ST SENSOR
000-041-869
FI-303
WIND DATA
000-041-870
FI-303-SENSOR
WIND DATA W/WIND SENSOR
000-041-871
FI-304
COMPASS DATA
000-041-872
FI-305
MULTI XL
000-041-873
FI-306
ANALOG WIND ANGLE
000-041-874
FI-307
STEER PILOT
000-041-875
FI-308
SPEED TRIM
000-041-876
FI-309
RUDDER ANGLE
000-041-877
FI-310
ANALOG COMPASS
ACCESSORIES
PART #
MODEL
000-041-878
FI-3001-DEPTH
DEPTH TRANSDUCER
000-041-879
FI-3002-LOG
ST SENSOR
000-041-880
FI-3003-WIND
WIND SENSOR
000-041-881
FI-3004-COMPASS
FLUXGATE COMPASS
000-041-882
FI-3005-SERVER
SERVER
000-041-883
FI-3006-DEMO-SERVER
SERVER SIMULATOR
000-147-005
FI-3007-BUZZER
EXTERNAL ALARM BUZZER
000-147-006
FI-3008-MOB
MOB BUTTON
000-147-007
FI-3009-CABLE-100M
INTERCONNECTION CABLE 100M
000-147-008
FI-3010-CABLE-8M
INTERCONNECTION CABLE 8M
000-147-030
FI-3011-CABLE-0.3M
INTERCONNECTION CABLE 0.3M
000-147-041
FI-3014-MASTCABLE-25M
WIND MAST CABLE 25M
57
Page 59

14.4 Abbreviations
Abbreviation. Description
A Angle
ADJ ADJust
ANC ANChor
ANC ANChor alarm
Arrival Arrival
ARC Arrival Circle
AVS AVerage Speed
AWA Apparent Wind Angle
AWS Apparent Wind Speed
BAT BATtery
BF BeauFort
BOD Bearing Original Destination
BSP Boat Speed
BTW Bearing To Waypoint
C Celsius
CE Communaute Europèenne
C10 Calibrate 10
CAL Calibrate
CG Course over Ground
CHK CHecK
CLR CLeaR
CMG Course Made Good
CMP CoMPass
COG Course Over Ground
CTS Course To Steer
CU Central Unit
d differential
D/R Dead Reckoning
DEFAULT Factory setting
DEV DEViation
DMG Distance Made Good
DEA DEpth Alarm
DPT DePTh
DRF DRiFt, Speed of current
DST DiSTance
DTW Distance To Waypoint
E East
EDIT EDIT
EMC Electro Magnetic Compatibility
EN European Norm
F Fahrenheit
F1-F9 Figure of merit
FA Fathoms
FT FeeT
GLL
58
Page 60

Geographic Latitude Longitude
GoTo Go To
GPS Global Positioning Network
HDM HeaDing Magnetic
HDT HeaDing True
HM Heading Magnetic
HT Heading True
id Identity
Init Initiation
Insert Insert
Km Kilometre per hour
KT KnoTs
KTS KnoTS
L Local
LAT LATitude
LCD Liquid Crystal Display
LGD Local Geodetic Datum
LOG LOG
LON LONgitude
LOW LOW
MAX MAX
m/s metres per second
MEM MEMory
Mh Miles per hour
MID MID
MN Magnetic North
MOB Man Over Board
m metre
N North
NAV NAVigate
NM Nautical Mile
NMEA National Marine Electronic Association
NXT NeXT
OCA Off Course Alarm
RET RETurn
Roll Roll
S South
S/A Selective Availability
SAT SATellite
SEA SEA
SEC SEConds
SET SET, Direction of current
SHA SHallow Alarm
SOG Speed Over Ground
STA STArt
STR STeeR
SW South West
TAC TACtical
TMP TeMPerature
59
Page 61

TRP TRiP
TTG Time To Go
TWA True Wind Angle
TWS True Wind Speed
UTC Universal Time Co-ordinate
VAR VARiation
VMG Velocity Made Good
W West
WCV Waypoint Closure Velocity
WP Waypoint
XTE Cross Track Error
- Minus
_ Plus
Wind from port side
Wind from starboard side
The boat is left of the desired track
The boat is right of the desired track
60
Page 62

616263
Page 63

Page 64

22339-1 Edidtion 2
 Loading...
Loading...