

Page 1

MP2300 Quick Reference Guide
Contents
2 MP2300 Memory Map
3 MP2300 Register Addressing
4 LIO Autoconfiguration Register Allocation
5 Basic Set of Registers
6 Motion Command Code Positioning
7 MPE720 Serial/Ethernet Communication
8 General Startup Procedure
9 Function Block Startup Procedure
10 Motion Program Startup Procedure
11 Motion Program Work Registers
12 Data Trace
13 Reference Units
14 Terminology Synonyms
14 Register Offsets
MP2300 Quick Reference Guide Rev1.5
Page 2
MP2300 Quick Reference Guide Rev1.5
e
:
A
"
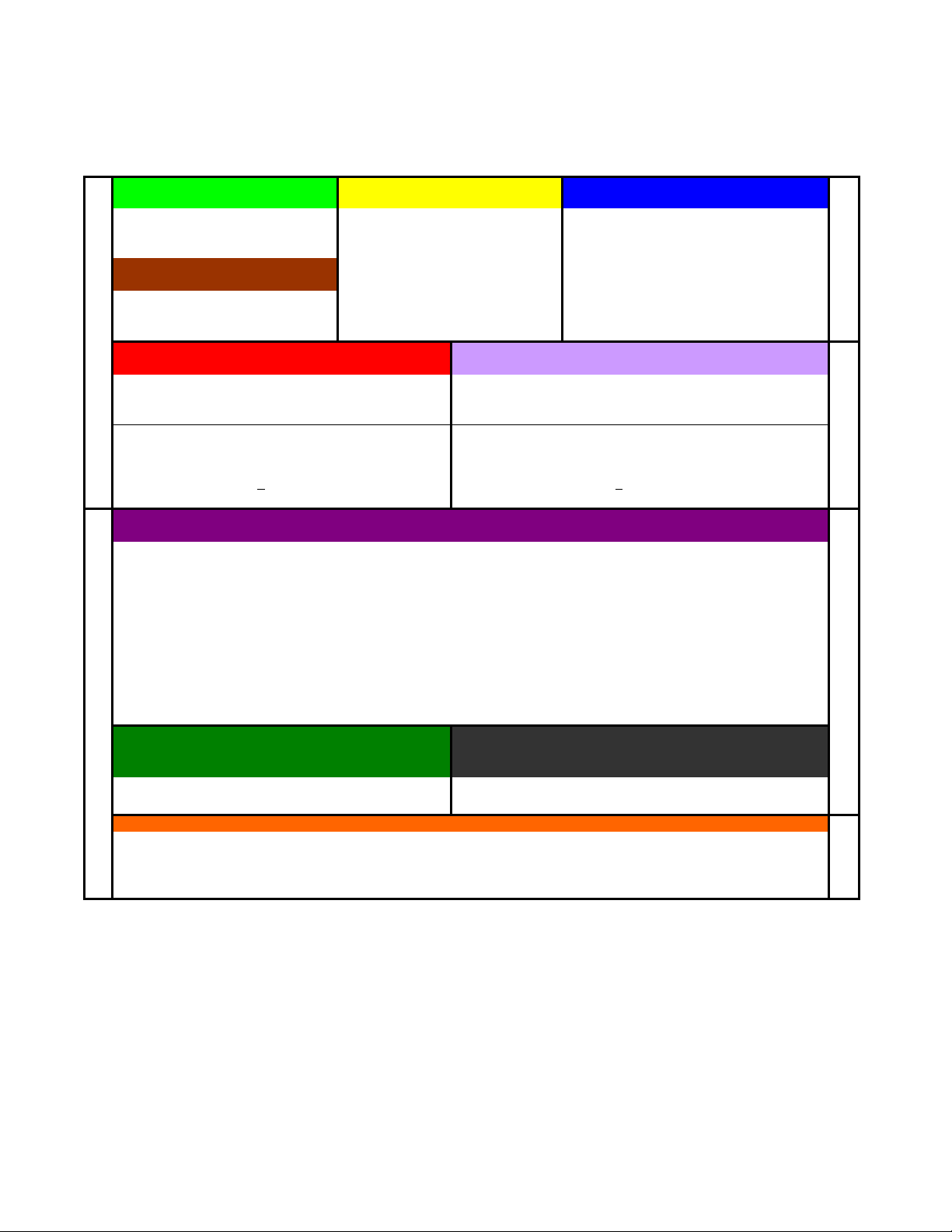
MP2300 Memory Map
5.5 MB Stores ladder drawings, Local registers and special tables
(Global)
S
System information and status (read only)
SW0000-1023
Example: Flicker relays, Calendar, User Free: MW00000-29999
Scan time setting, error codes, ect. Convention:
Fixed Parameters (for each axis)
Written to in Module Configuration Mechanical system specifications Axis#1:MW30100. Offset=200 per axis
C
(Global) M (Global)
Constant, Read only registers. General Multi-Purpose read/write registers
Data that end user can change in MPE720
without needing to access the drawings.
Axis#1:MW1000-1999, Axis#2:MW2000-2999
(MW00000-65535)
Example: *Function Block RDA: MW30000-65535
Define axis units, motor specs. (pulley ratios, encoder counts per load rev) Master-Slave: MW56000. Offset=50 per M-S Pair
Cannot be written by ladder Reference: RDA Spreadsheet
Changes usually require power cycl
(Battery Backup)
Reference
* If using motion function blocks.
I (Input) IW0000-FFFF O (Output) OW0000-FFFF
general purpose & motion data (Read only by application program) general purpose &motion data (Read/Write by application program)
Physical Inputs: IW0000-7FFF Physical Outputs: OW0000-7FFF
Convention: IW0410+ for Local I/O modules Convention: OW0410+ for Local I/O Modules
IW0010+ for M-LINK I/O modules OW0010+ for M-LINK I/O modules
Axis (Motion) Input: IW8000-807F (Module#1, Axis#1)
Register Memory
"motion monitoring" Offset 80h per axis "motion setting" Offset 80h per axis
xis (Motion) Output: OW8000-807F (Module#1, Axis#1)
800h per module 800h per module
Example:
IB8000 0
= controller ready
Example:
OB8000 0 = turn servo on
Reference: Basic Module User Man 7.2.3 Reference: Basic Module User Man 7.2.2
D (Local Registers)*
Used as general purpose read/write in the defined Drawing only.
Suggested Bits: DW00000-00008 (DB000000~DB00008F)
Convention: One-Shot DW00009 (DB000090~DB00009F)
Word Operations: DW00010-00025 (16-bit integers)
Accumulators: DW00026 (16-bit Integer accumulator)
DW00027 (16-bit Logic [Hexadecimal] Accumulator)
DL00028 (32-bit Long Accumulator)
DF00030 (32-bit Floating point Accumulator)
Long & Float DW00032-00098*
F.B. Work Register: DW00100-00320*
(32-bit Integers, 32-bit Floating Point)
(Bits, integers, floats as defined in Function Block)
*Default is 32 D-registers per drawing. R-click drawing in File Manager - increase to 320 when using Function Blocks.
Reference:
#
("Sharps")
Local Constants. General purpose, read-only by the specifed Drawing
(Overwritten from FLASH at power up)
they are defined in.
Set up via a table in the "properties" dialog box for each
drawing. Rarely Used
#W00000-16383 Module Configuration
Each hardware module on the rack has several configuration files. This data
is stored in program memory.
New project requires setting Module Configuration first. Select
from File Manager under Definition Folder"
Drawings: H, L, A, I
H (High Scan) Use for all code that runs motion related functions
L (Low Scan) Use for code that runs HMI, or user operated switches, lights, etc
Program Memory
A (Startup) Use for drawings that should automatically run once at controller power up.
I (Interrupt) Use to run a special interrupt routine after receiving a local input defined as a dedicated "Interrupt.
D
E
C
I
M
A
L
H
E
X
A
D
E
C
I
M
A
L
D
E
C
I
M
A
L
Page 2 of 14
Page 3
MP2300 Quick Reference Guide Rev1.5
A
A
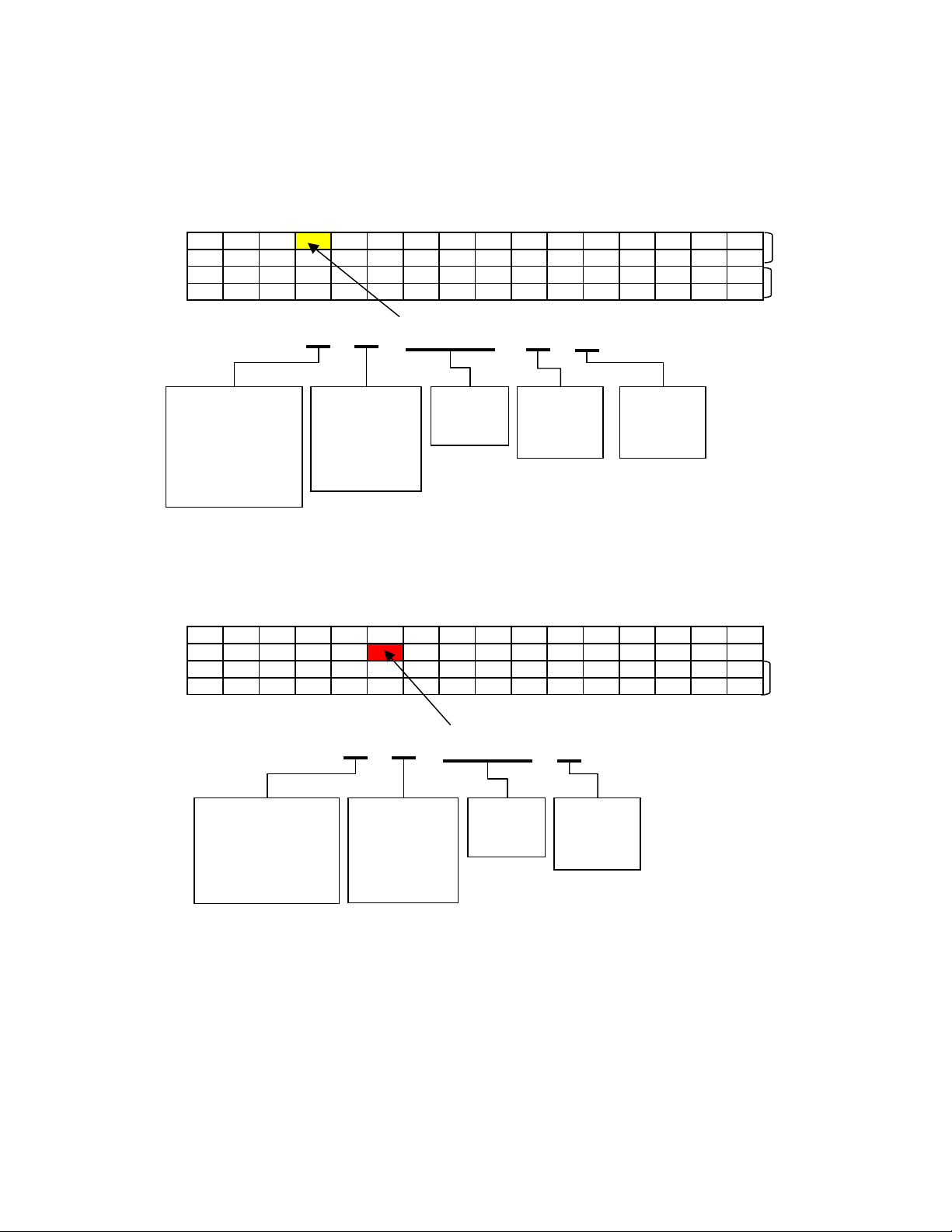
MP2300 Register Addressing
All registers except Input and Output : S, C, M, D, #, A
Address FEDCBA9876543210
MW2008 ML2008
MW2009
MW2010 MF2010
MW2011
M B 2008 C i
Register Type
S: System
C: Global Constant
M: Multi-Purpose User
D: User Local
#: Local Constant
: Startup
Input and Output Registers
Data Type
B: Bit
W: 16-bit Word
L: 32-bit Long
F: 32-bit Float
: Address
Register
Number
(Decimal)
Bit Number
(Hex)
If Bit Data Type
Subscript
(i or j)
optional
Address FEDCBA9876543210
OW8018
OW8019
OW801A OL801A
OW801B
O B 8019 A
Register Type
O: Output (Motion Setting)
I: Input (Motion Monitoring)
Data Type
B: Bit
W: 16-bit Word
L: 32-bit Long
F: 32-bit Float
Register
Number
(Hex)
Bit Number
(Hex)
If Bit Data Type
Page 3 of 14
Page 4
MP2300 Quick Reference Guide Rev1.5
3
LIO-01 / LIO-02
Register Allocation after Automatic Self-Configuration
Ref. Basic Module User's Manual (SIEPC88070003B) Section 6.5.
LIO-0x #1 LIO-0x#2 LIO-0x #1 LIO-0x#2
Digital Inputs
(As 16-bit word)
Input 0 IB04100 IB04400 Output 0 OB04110 OB04410
Input 1 IB04101 IB04401 Output 1 OB04111 OB04411
Input 2 IB04102 IB04402 Output 2 OB04112 OB04412
Input 3 IB04103 IB04403 Output 3 OB04113 OB04413
Input 4 IB04104 IB04404 Output 4 OB04114 OB04414
Input 5 IB04105 IB04405 Output 5 OB04115 OB04415
Input 6 IB04106 IB04406 Output 6 OB04116 OB04416
Input 7 IB04107 IB04407 Output 7 OB04117 OB04417
Input 8 IB04108 IB04408 Output 8 OB04118 OB04418
Input 9 IB04109 IB04409 Output 9 OB04119 OB04419
Input 10 IB0410A IB0440A Output 10 OB0411A OB0441A
Input 11 IB0410B IB0440B Output 11 OB0411B OB0441B
Input 12 IB0410C IB0440C Output 12 OB0411C OB0441C
Input 13 IB0410D IB0440D Output 13 OB0411D OB0441D
Input 14 IB0410E IB0440E Output 14 OB0411E OB0441E
Input 15 IB0410F IB0440F Output 15 OB0411F OB0441F
IW0410 IW0440 OW0411 OW0441
Digital Outputs
(As 16-bit Word)
Counter
NOTE: There can be up to 2 LIO-0x modules in an MP2300 system.
The first module to be auto-configured is the left-most module.
IW0420 / OW0420
Page 4 of 14
Page 5
MP2300 Quick Reference Guide Rev1.5
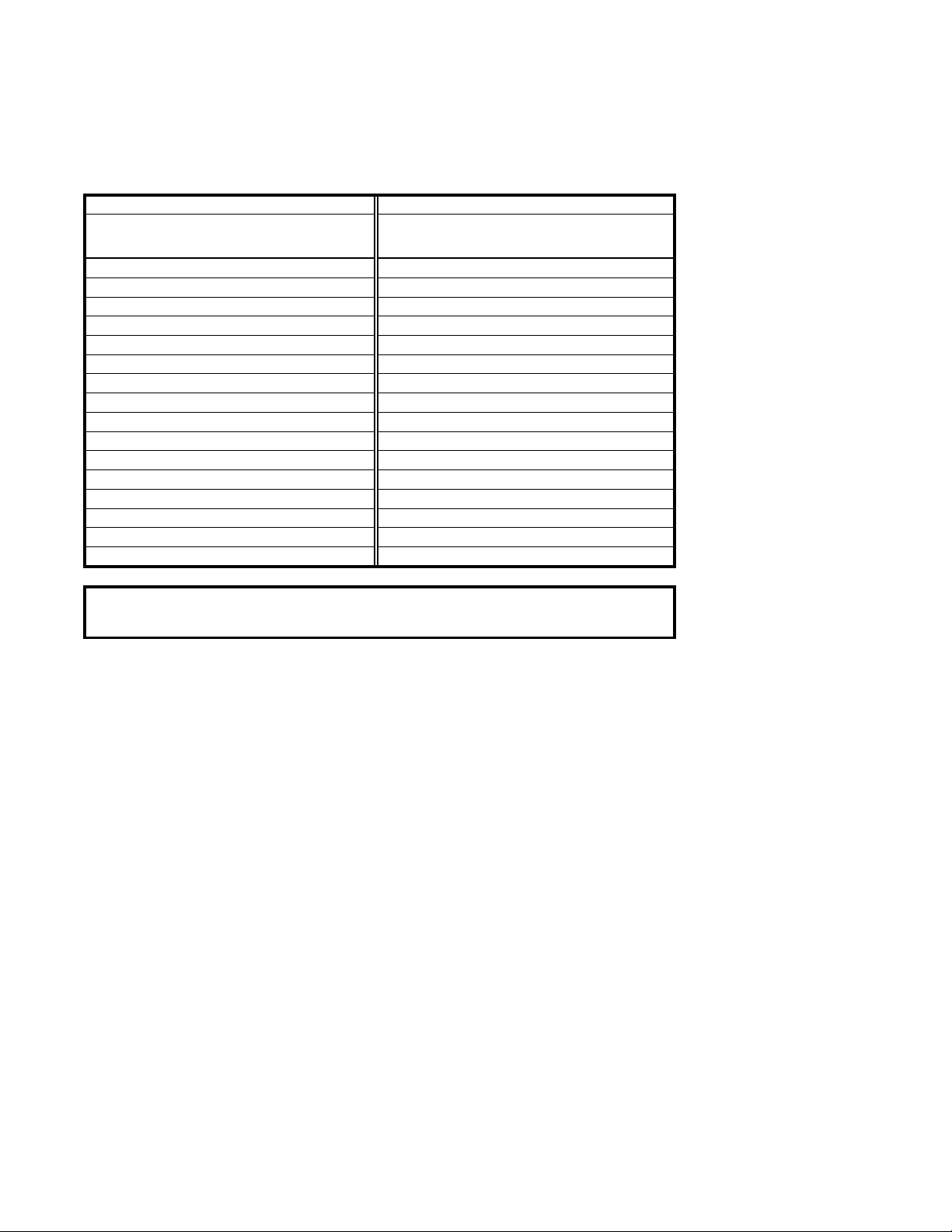
Basic Set of Registers for Register-Based Programming
Assume Module(Circuit) #1, Axis #1. Add 800h per circuit, 80h per axis.
Motion Setting Registers (OWxxxx)
Name Word Bit [Unit] / Note Reference
Servo On
Alarm Clear
Speed ("Feed" Speed)
Motion Command Code
Position Reference
Abs/Inc Position Mode
Step Distance
Direction (Step,Jog)
Acceleration
Deceleration
OB8000 0
OB8000 F
OL8010
OW8008
OL801C
OB8009 5
OL8004
OB8009 2
OL8036
OL8038
[10^3 R.U./minute (by default)]
Select Speed Units in OW8003.0-3
1=Position, 3=Home, 7=Jog, 8=Step
[R.U.] Default R.U. is encoder count
1=Abs, 0=Inc (default)
[R.U.] Default R.U. is encoder count
0=Fwd, 1=Rev
[ms to rated speed (FP34)]
Select Acceleration Units in OW8003.4-7
[ms to rated speed (FP34)]
Select Deceleration Units in OW8003.4-7
Motion Monitoring Registers ( I Wxxxx)
Name Word Bit [Unit] / Note Reference
Servo Alarm
Servo Warning
Mtn Cmd Code confirm
Main Power On
Servo Ready
Servo On Confirm
Feedback Position
Feedback Speed
Positioning Complete
Terminology used on this page
"R.U.": Minimum increment of motion. By default 1 R.U. = 1 Count. Used fixed parameters to change.
"Count": post-quadrature encoder count
"Pulse": pre-quadrature encoder pulse
IL8004
IL8002
IW8008
IB802C 4
IB8000 3
IB8000 1
IB802C 3
IL8016
IL8040
IB800C 1
=0 when no alarm. Each bit represents
different alarm
=0 when no warning Each bit represents
different warning
[counts or Reference Units]
Page 5 of 14
Page 6
MP2300 Quick Reference Guide Rev1.5
Motion Command Code
Indexing Example
Move from position 5000 to position 8000, assuming the following for module (circuit) #1, Axis #1
ILC008=5000 Current position is 5000
ILC022=0 No alarms
IBC0013=1 Servo is ON
Solution using STEP
OL8044=3000 Step Distance 3000
1
OB80092=0 Direction Forward
OL8010>=0 Set Feed Speed
2 OW8008=8 MtnCmdCd starts motion
Solution using POSITION (INCremental)
OL801C=0 Initial position 0
1
OB80095=1 Incremental Positioning Mode
OL8010>=0 Set Feed Speed
2 OW8008=1 MtnCmdCd defines initial position
3 OLC012=3000 Position reference incremented starts motion
Solution using POSITION (ABSolute)
OB80095=0 Absolute Positioning Mode
1
OL8010>=0 Set Feed Speed
OL801C=8000 Position Reference to Absolute position
2 OW8008=1 MtnCmdCd starts Motion
Page 6 of 14
Page 7

MP2300 Quick Reference Guide Rev1.5
Serial & Ethernet Connection Procedure (To MPE720)
Serial Connection
Instruction Step Detail
Define the PC's Serial
port as a valid way to
communicate via
MPE720
Ethernet Connection
MW/MPE720 communicates to the
MP2300's 218IF-01 Ethernet module
through the Communication Manager
program. All 3 must be configured to log
on online over Ethernet.
1 Connect serial cable from MP2300 port 1 to PC's COM port.
Open Communication manager from system tray
2
Double click a "logical port number", choose "serial" and click "Detail"
3
Choose desired "physical port" number that the serial cable is connected to on
4
the PC.
5 Save and close communication manager
Restart MPE720
6
Be sure the 218-IF TEST and INIT dipswitches are both off (left)
Instruction Step Detail
Give the 218IFmodule an
IP address
Define the PC's Ethernet
port as a valid way to
communicate via
MP2300
Tell MW/MPE720 to
connect via Ethernet
Logged On, Online via serial port (CP-217)
1
From file manager, under Definition folder, open Module Configuration
2
Highlight the column of 218IF-01 slot
3
In the Module Details section, double-click slot 2 (or R-click - Open Slot)
4
Enter the IP address for the MP2300 and save. (The table at the bottom of the
5
screen is for other Ethernet devices controlled by the MP2300).
Save configuration, close window, and save and save to flash
6
Cycle unit power so that IP address is updated. (be sure all dipswitches are off
on both the base unit and the 218IF-01 to avoid overwriting the flash save upon
7
power up)
Open Communication Manager (from windows system tray, near clock)
1
2 Double click a blank logical port to open the settings
3 Choose CP-218, click detail
4 Select the IP address of the PC.
5 Turn "Default" Off
6 Click "OK" twice, save, and close communication manager
7 Close MW/MPE720, then re-open so that the data is refreshed
Log Off
1
2 R-click controller folder, choose properties
Under Network tab, choose port number with CP-218 that you just made in
3
Communication Manager
4 Type the IP address of the MP2300 as defined in Module Configuration
6 Log On, Online
NOTES:
It is assumed that a valid IP address has been acquired from the network administrator.
To connect directly, use a crossover cable and configure your PC to use a static IP address.
As noted on the 218IF module, the network must be 10mbps, or switchable from 100mbps to 10mbps.
If a 218IF error does not go away after power is cycled, turn on the 218IF INIT dipswitch and cycle power.
Page 7 of 14
Page 8

MP2300 Quick Reference Guide Rev1.5
A
j
MP2300 Startup Procedure
ll equipment must be properly wired and installed.
Step Instruction Detail
1 Power OFF Prepare for first Power ON
2 Set M-LINK address MP2300 base unit is node 0, so set rotary switch 1-F
3 Set CONFIG and INIT dipswitches (right) Prepare to erase all RAM (not FLASH) and self-configure hardware
4 Power ON
5 Set all dipswitches OFF (left)
6 Start MotionWorks MPE720 Connect Serial Cable JEPMC-W5311-03B
R-Click to create new Group folder, Order
7
subfolder, and Controller subfolder
8 R-Click Controller folder and select "Online"
9 Double-click Controller folder to Log On The default User Name and Password are both USER-A
10* Save to flash
Wait for "All Green" lights on Servopacks and Controller. Takes about
15sec.
The configuration is now termporarily stored in program RAM and
should not be self-configured again at next power up.
Type any name 8 characters or less, no spaces. Choose "Controller
Type" as MP2300
Changes will be made to files on the computer as well as on the
controller, instead of just the computer.
When the window pops up, click the leftmost button (Save/Compare)
and accept other defaults. Close window when complete.
11* Save controller configuration to hard disk
*These steps can be skipped because they will be completed when (1) Ethernet (rather than serial) will be used to
logon online. (2) Function Blocks will be used.
R-Click controller folder, Transfer - All Files - From Controller to
MPE720. Uncheck "Registers" or transfer will take over 7 minutes.*
SERVOPACK Default Set Procedure
(Optional Procedure) When servopack is not brand new, use this procedure to restore default parameter settings
Step Instruction Detail
R-Click Controller folder, Log OFF. R-Click controller folder, check
1 Log On ONLINE
Open Servopack Module Configuration2
Save defaults for each axis3
"online". Double-click Controller folder to log on. The default User
Name and Password are both USER-A
From file manager, under Definition folder, open Module Configuration.
Engineering Manager application opens.
Highlight Controller Slot 00 (MP2300). In the Module Details section,
double-click slot 3 (or R-click - Open Slot).
In the SVB Definition window, Select SERVOPACK tab
Choose the Axis number from the pull-down list (top left)
Under Edit menu, choose Default Set. Click OK and Save
Repeat for each axis as necessary
Cycle Servopack Power
Symbol Import Procedure
Step Instruction Detail
1 Log On (Online or Offline)
2 Close everything except File Manager Close Ladder Editor, Engineering Manager, etc
3 Open Symbol Manager
4 Open Symbol List
5 Import Symbols
6 Save Symbols
Repeat process for additional symbol list *.CSV files
Double-click Controller folder to log on. The default User Name and
Password are both USER-A
From File Manager, under Database folder, open Symbol Manager.
Symbol Manager Application opens.
Under View menu, be sure Data Tree is checked. Expand Data Tree to
open Symbol List and double-click All Register.
Under File menu, choose Import. Locate desired *.CSV symbol file
(such as MotionImport.csv) and open.
Use the SAVE icon, CTRL-S, or File-Save. It may take a few seconds
for saving to complete, depending on the number of symbols in the
ect and the speed of the computer.
pro
Page 8 of 14
Page 9

MP2300 Quick Reference Guide Rev1.5
Function Block Startup Procedure
First complete the MP2300 Startup Procedure
There should be a new controller folder
Step Instruction Detail
1 Acquire project file
Log ON (online)2
Extract MAL file to
3
controller files on
hard drive*
Transfer Function blocks
4
to Controller*
5 Save to Flash
6 Save to Hard Disk
7 Cycle Power Cycle power is needed for initialization drawings (A drawings) to run
To start a totally blank Function Block project, only check FUNC box and all detail. To start with the pre-
*
made Function Block template, check both DWG and FUNC and under each detail select "all".
FB040823.MAL or equivalent. Download to C:\ or any directory without
spaces.
R-Click Controller folder, Log OFF. R-Click controller folder, check "online".
Double-click Controller folder to log on. The default User Name and
Password are both USER-A
R-click Controller folder, Transfer, Selected Files, From Another Drive to
MPE720. Find *.MAL file. *Check the FUNC box. Then click "transfer"
button. Takes about 30 seconds. Close window when complete.
R-Click controller folder, Transfer, Selected Files, From MPE720 to
Controller. *Check the FUNC box. Then click "transfer" button. Transfer
takes almost 4 minutes with serial connection. Close window when complete.
Click the Black Diskette Icon. When the window pops up, click the leftmost
button (Compar/save) and accept other defaults. Close window when
complete.
R-Click controller, Transfer - All files - From Controller to MPE720. Uncheck
registers or it will take over 7 minutes.*
Page 9 of 14
Page 10

MP2300 Quick Reference Guide Rev1.5
Motion Program Startup Procedure
First complete the MP2300 Commissioning Procedure
There should be a new controller folder
Group Definition (axes used in motion program)
Step Instruction Detail
1 Log on Online
2 Open Group Definition
3 Enter & Save a Group Name
Enter the number of axes that
4
will be used in the Motion
Program
Define Module Number, Axis
5
Number, and Axis Name
6 Save Group Definition Save Icon
7 Refresh view In File Manager, Under View menu, choose Refresh
Motion Program
Step Instruction Detail
1 Start a new Motion Program
Things to know before a Motion
2
Program is started
3 Write Motion Program
4 Save Motion Program Use save icon. Also save to flash.
R-Click Controller folder and select Log Off. R-click again
and check "online". Double-click controller folder to log on
In File Manager-> Programs -> High Scan Programs ->
Motion Programs -> DoubleClick "Group Defnition"
Under the "Group List" Tab. When saved a new "Group01"
tab will appear.
Under the "Group01" Tab, in the "Axis" area.
Under "Group01" Tab, in the "Axis Definition" area. In the
"Physical" row, 01.01 means motion module 1, axis 1.
Usually the default is fine. In the "Logical" row, enter a text
name for the axis, such as X or Y.
In File Manager-> Programs -> High Scan Programs ->
Motion Programs, R-click "Motion Group01" and select
"New Program".
There are no commands for SERVO ON or JOG in the
Motion Programming Language. These steps are to be
accomplished in Ladder.
First line must be 'MPM001' and last line must be 'END;'.
Instructions terminate with semicolon. Comments enclosed
in quotes ("comment"). Refer to Motion Programming User
Manual (SIEZ-C887-1.3) for extensive details on each
command.
Call From Ladder
Step Instruction Detail
1 Use the MSEE instruction
2 Rules before starting
3 Start the motion program
4 Rules while running
Page 10 of 14
MSEE is located under the "Motion" tab in Ladder Editor. It
can only be used in an H-drawing. Define a starting
address for the four 16-bit work registers in the Data field.
Often DA00000 is used defining DW00000 through
DW00003, but be sure to use M or D registers that are not
used elsewhere.
All axes in the group must have: 1) Servo On, 2) Motion
Command Code =0 and not continually updated to 0, 3) No
other motion program in same group runnin, in alarm, or
paused, 4) SERVOPACK self-writing function disabled FixedParameter 1 bit A=1.
Bit 0 of the second word defined in the Data field
(DB000010 in the above example) must go high for the
motion program to start. See Motion Program Work
Registers in this QRG for more information.
Ladder code must not manipulate Motion Command Code,
unless motion language is not using the Motion Command
Code register the time, and proper interlocks are used to
flag the ladder code
Page 11

MP2300 Quick Reference Guide Rev1.5
Motion Program Work Registers for MSEE instruction
OUTPUT (Motion Program Status)
DW00000
Bit Name Description
DB000000 Program Running ON while running
DB000001 Program Paused ON while paused
DB000002
DB000004
DB000008 Program Alarm ON when Motion Program Alarm has occurred
DB000009 Stopped at Break Point
1st Work Register2nd Work Register
DB00000B Program Debugging Mode ON during Windows (EWS) debug mode
DB00000D Start request signal history ON during request
DB00000E Program Duplication Error
DB00000F Program Number Limit Error ON when the number of steps in program exceeded maximum
program stopped with
program stop request
Program in Debug (Single
Block) Mode
ON when stopped
ON during debug via ladder (registers)
ON when another Motion Program in the same group has started while this
program is running
The "Data" field of the
MSEE instruction defines
the address for the output
and input registers of the
motion program.
Ex: DA00000 means that
DW00000 through
DW00003 will be used.
INPUT (Motion Program Control Signals)
DW00001
Bit Name Description
DB000010 Program Start Request ON with rising edge. (if it CAN start it will, otherwise alarm)
DB000011 Program Pause Request ON will pause motion blocks
DB000012 Program Stop Request
DB000013 Program Debug Mode Select "Single block mode". ON will force debugging mode
DB000014 Program Debug Start "Single Block Mode" start. ON (transition) debug block by block
DB000015 Program alarm Reset ON will clear the program alarm (stop program before issuing alarm reset)
DB000016
DB000018 Block Skip 1 Operation
DB000019 Block Skip 2 Operation
DB00001D
DB00001E Interpolation Override Setting ON activates the interpolation override speed with the 3rd MSEE work register
Program Continuous
Operation Start Request
System Work Number
Setting
ON will stop all group motion, exit the Motion Program, and generate a motion
program alarm
ON will cause program to ….
ON will cause the program to skip an interpolated motion block if the SKP ss1
instruction was used instead of MVS
ON will cause the program to skip an interpolated motion block if the SKP ss2
instruction was used instead of MVS
ON Sets system work register number with 4th word of MSEE work register
INTERPOLATION OVERRIDE (Speed)
DW00002
Register
3rd Work
The speed set in this register [0.01% of FMX] will override the interpolation speed set in the motion program
(F & IFP commands) when bit E of the 2nd word of the MSEE work register is ON
SYSTEM WORK REGISTER
The system work register number in this register will be used when bit D of the 2nd word of the MSEE work
DW00003
Register
4th Work
register is ON. Otherwise the system work register number will be automatically defined by the system and
may be different each time.
Page 11 of 14
Page 12
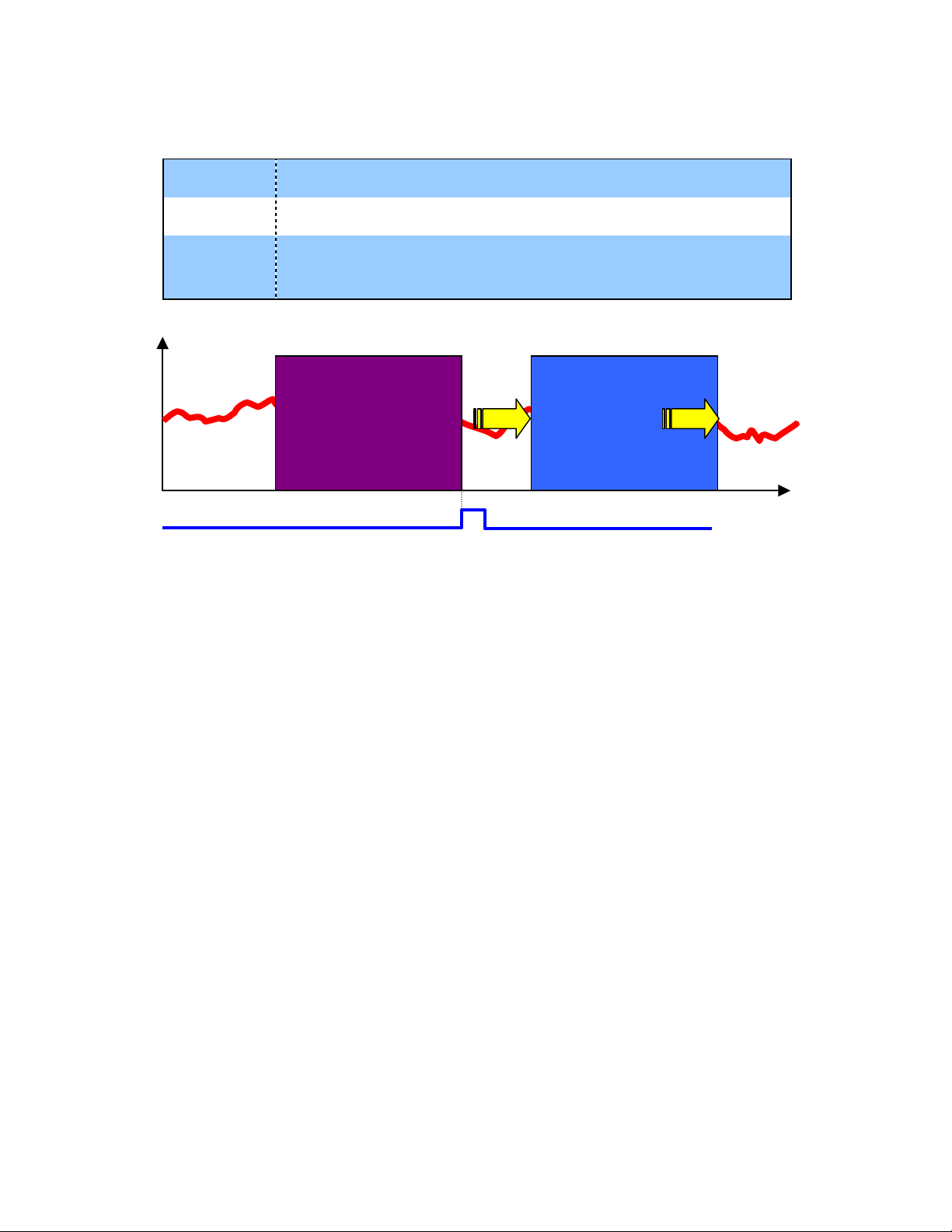
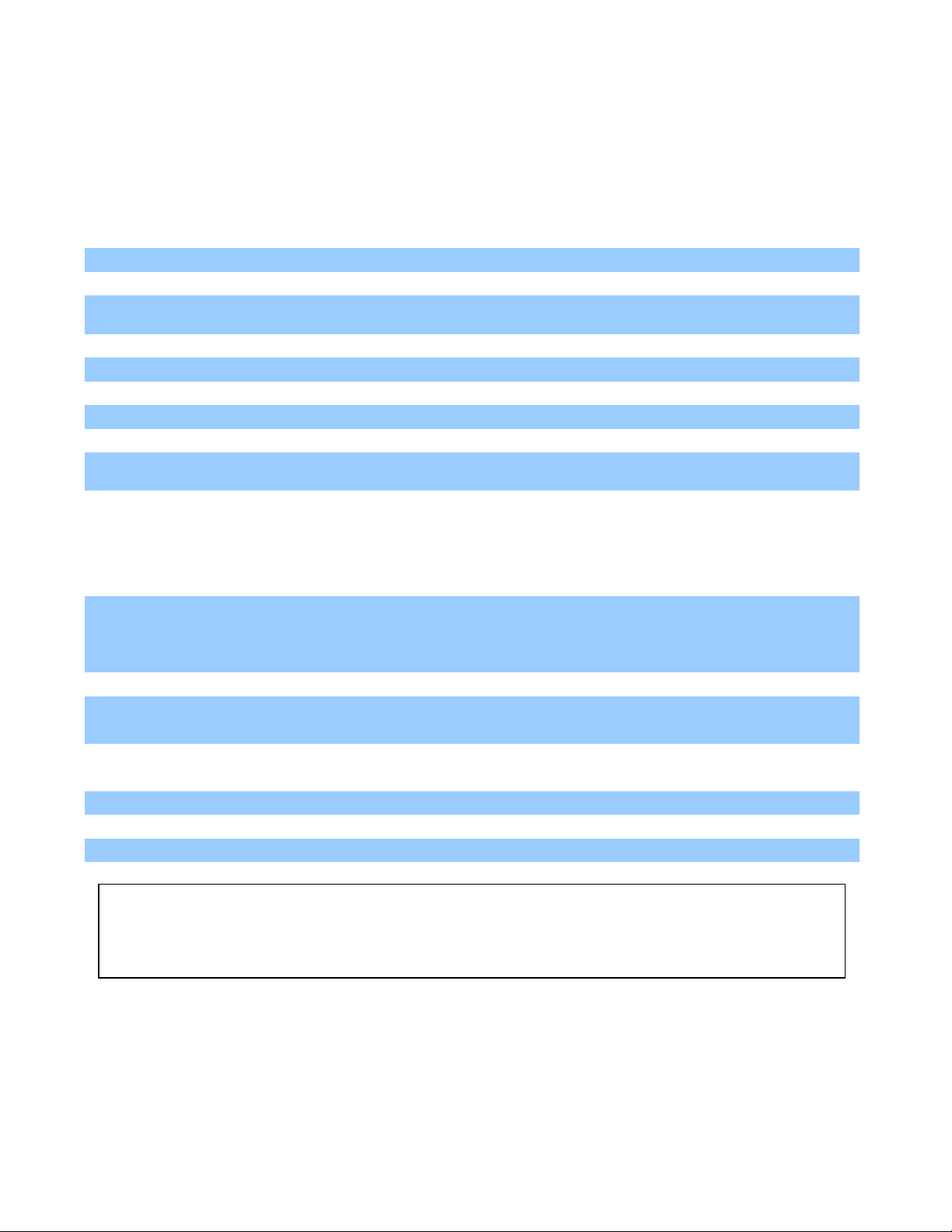
Data Trace
Quick Method
Add registers
configuration
Snap the data
Illustration
to trace
Save
MP2300 Quick Reference Guide Rev1.5
R-Click in ladder, select "register to trace", or type registers manually. To
graph speed, create it in ladder using position scan differential.
CTRL-S or from menu. The selected data starts filling the trace buffer
(FIFO) immediately
Click the Snap button to display the data currently in the trace buffer.
Click Snap AFTER the motion completes. Although the data displayed is
fixed, data continues to fill the buffer.
Notes
Old Data
data
Snap
By default, the data saved in the list is updated every H-scan
The trace buffer is limited to 32,000 16-bit words per "group". Once it is full, old data is
pushed out by the new data.
Four (4) groups of trace data can be collected simultaneously.
Set the trigger condition to capture an event, such as a fault, or to change sample rate.
Snap Data Current Data
time
Page 12 of 14
Page 13
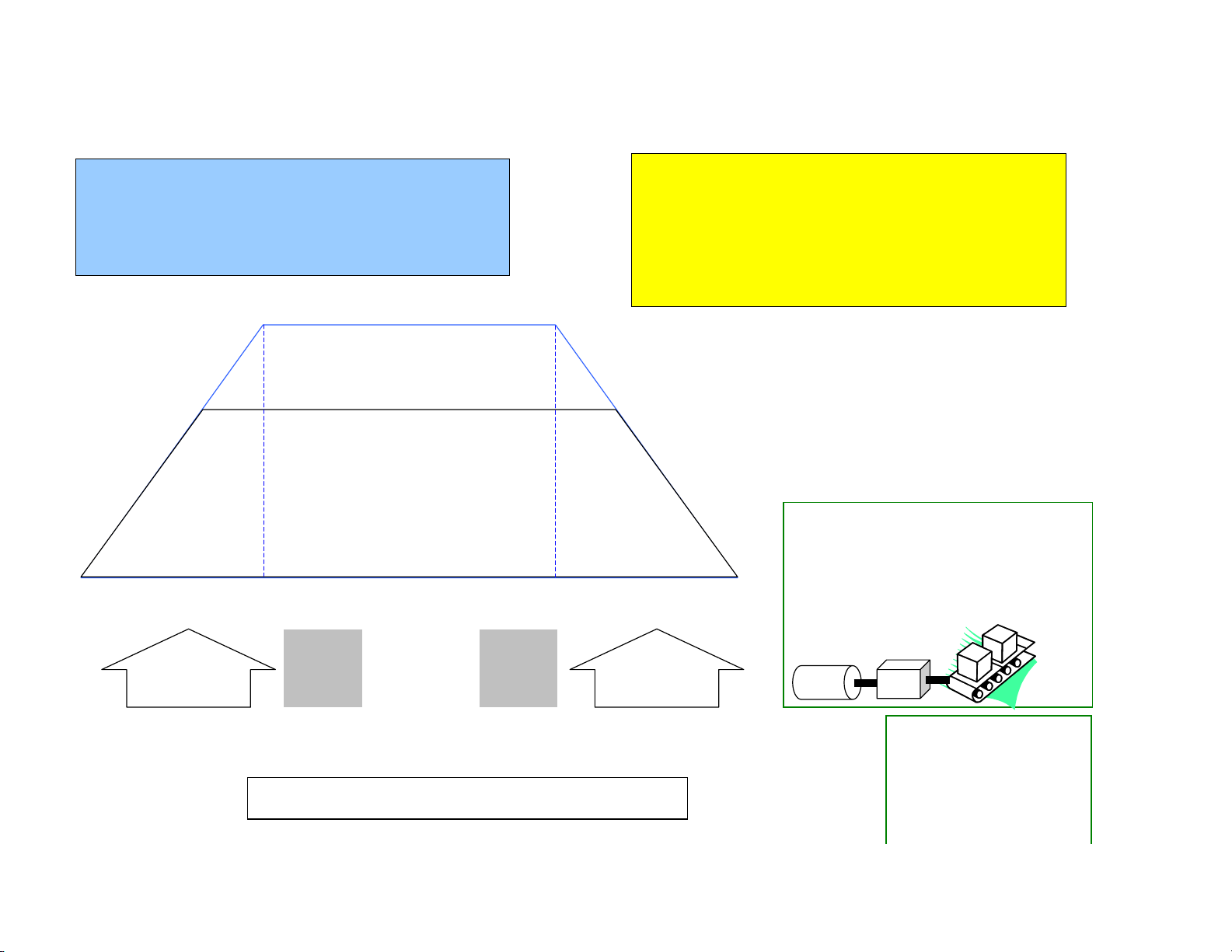
Reference Units (User Units)
A
MP2300 Quick Reference Guide Rev1.5
KEY
* RU = "reference unit" = "command unit" - fraction of the User Unit
* User Unit = base unit such as mm or inch
* FP = Fixed Parameter
* MCC = Motion Command Code (OWxx08)
* Register Values given for Circuit#1, Axis#1
* Bold type represents default setting
FP34: Rated Speed [RPM] (Default 3000)
OL801C: Position Reference [RU]
or
OL8044: Step Distance [RU]
OB80092 = Step Direction
Servopack Pn80B: Acceleration Rate
[10,000 RU/sec^2] (Default 65535)
Use MCC=10
to change
FP1.A=1
Update at power up or
when changed
cceleration
when FP1.A=0
OL8036: Acceleration [select unit OW8003.4-7] (Default 0)
0: [RU/sec^2]
1: [ms to Rated Speed (FP34)]
OL8036/OL8038 =0 sets servopack acceleration/deceleration rate to
65535[10,000 RU/sec^2], independent of unit selected in OW8003.4-7
NOTES:
* Register Addresses assume Circuit#1, Axis#1
* Reference Units not compatible with Function Block programming.
* Default Positioning units are [encoder pulses (post quad)]
* Default Speed Reference units are [1000 pulses/min]
* Default Accel/Decel units are [ms to rated motor rpm]
* Default FP1.A=1 autmatically transfers accel/decel to servopack
* MPE720 5.31B "Units" in module configuration do not update
* Basic Module User Manual
(SIEPC88070003B) lists incorrect unit defaults
OL8010: Speed Reference [select unit OW8003.0-3] (Default 3000)
0: [RU/sec]
1: [10^n RU/min]
2: [% of Rated Speed (FP34)]
n = 3 when FP4=0 (pulse)
n = FP5 when FP4<>0
If PULSE is not chosen as the User Unit, use the
following parameters to define the relationship
between PULSE and RU.
FP36: Encoder Pulses (post quad) per motor rev
FP8: Motor Revs into gearbox
Servopack Pn80E: Deceleration Rate
[10,000 RU/sec^2] (Default 65535)
Use MCC=11
to change
Deceleration
when FP1.A=0
FP1.A=1
Update at power up or
when changed
FP9: Machine Shaft Revs out of gearbox
FP6: RU per Machine Shaft Revolution
36
Motor
OL8038: Deceleration [select unit OW8003.4-7] (Default 0)
0: [RU/sec^2]
1: [ms to Rated Speed (FP34)]
RU = FP4 *10^-n
User Unit = FP4
0: Pulse (post quad)
1: mm
2: deg
3: inch
8
G.B.
9
For an "Infinite Length" Axis
* Rotary Table
* Conveyor
FP1 bit0: Set axis type to "Infinite
Length"
FP10: Set R.U. per rotation.
This will be 360 degrees
6
Page 13 of 14
Page 14

MP2300 Quick Reference Guide Rev1.5
Terminology Synonyms and Definitions
Parameter Register
Reference Unit (R.U.) Command Unit
User Unit Base unit such as mm, inch, degree.
Module # Circuit #
MotionWorks MPE720
Motion Command Motion Command Code
Motion Programming Motion Language (Structured Text)
Register Offsets
Offset Start Note
Per Axis 80h IW8000 / OW8000
Per Module / Circuit 800h IW8000 / OW8000
Function Block per axis 200 MW30100
Function Block Master-Slave 50 MW56000
Page 14 of 14
 Loading...
Loading...