

yaskawa i80 Connection Manual
YASNAC
CNC SYSTEM FOR MACHINE TOOLS
CONNECTING MANUAL
i80
YASUAWA
2
3
INDEX
Subject
A Ac sERvoMoToRs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ALLowABLE Frequency
oFopERATloN
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
AMBIENT Temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C
cABINET DEslGN FoR
cABLEcoNNEcTloN
cABLEspEclFlcATloNs
HEAT FAcToRs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ,2.3 . . . . . . . . . . . . . . . .
cABLEs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
cHARAcTERlsTlcs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A4. . . . . . . . . . . . . . .
Section No.
A2.1
. . . . . . . . . . . .
A4.3
. . . . . . . . . . . ...309
3.1
. . . . . . . . . . . . . . . . . ..~
4.2
. . . . . . . . . . . . . . . . .
6.
. . . . . . . . . . . . . . . . . . .
19-
. . . . . . . . . . . . . . . . .
Page
..~()~
lo
15
53
94
..~()~
CLAMPING
CONDITIONS FOR CABINET CONSTRUCTION
coNFIGuRATloN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
connection
Connection oF
Connection
CONNECTION TO
connection To
connection
connection To
connection
connection
connection To
connection To
connection To
connection
Connection TO FEED SERVO UNITS
CONNECTION TO
Connectio
confection To
connection To
connection
Connectio
connection To
D DEscRlpTloN
DETAl Ls oF
CA6LESANDSHIELDING
DIAGRAM
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
INpuT
sEQuENcE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
OF OpERATORJSpANEL
Additional REMoTE I/o
EAcHuNIT
T
o
EAcHuNIT
EAcHuNIT
T
o
EAcHuNIT
T
o
EAcHu NIT
EAcHuNIT
EAcHuNIT
EAcHuNIT
To
EAcHuNIT
GENERAL-pURpOSE
n TO MAN UAL PULSE GENERATOR
REMoTEl/o
Rs-232c
To
n TO SPINDLE DRIVE UNIT
oFslGNALs
co
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Rs-232c
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14.2 . . . . . . . . . . . . . . . .
TApE
READER
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16.3 . . . . . . . . . . . . . . . . 62
nnection
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17-3 . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
I/o . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CABLES
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
DESlGN
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . .
6.2
. . . . . . . . . . . . . . . . .
4.
. . . . . . . . . . . . . . . . . . ...8
2-
. . . . . . . . . . . . . . . . . . ...6
9.1
. . . . . . . . . . . . . . . . .
100
. . . . . . . . . . . . . . . . . 2
9.
. . . . . . . . . . . . . . . . . . .
10.I
. . . . . . . . . . . . . . . . 24
1,.,
. . . . . . . . . . . . . ...28
12.1
. . . . . . . . . . . . . ...45
1~,1
. . . . . . . . . . . . . ...54
14-1
. . . . . . . . . . . . . . . 55
15.1
. . . . . . . . . . . . . . . . 59
16.1
. . . . . . . . . . . . . ...61
170~
. . . . . . . . . . . . . . . .
1~.1
. . . . . . . . . . . . . . . .
11.
. . . . . . . . 28
18-
. . . . . . . . . . . . . . . . .
15,
. . . . . . . . . . . . . . . . .
17.
. . . . . . . . . . . . . . . . .
14.
. . . . . . . . . . . . . . . . . 55
,6
2,
21
64
~~
66
66
59
63
4
55
12.
. . . . . . . . . . . . . . . . .
13.
. . . . . . . . . . . . . . ...54
8-2
. . . . . . . . . . . . . . . . .
45
20
DETAILS OF CON NECTION OF OPERATOR’S PANEL . . . . . . . . . . . . 9.2 . . . . . . 22
DETAILS OF Connection OF INpuT
DETAILS OF Connection To FEED sERvo
sEQUENCE
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-2 . . . . . . . . . . . . . . . . 25
uNITs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 . . . . . . . . . . . . . . . .
s,
DETAILS OF CONNECTION TO SERVO UNIT MAIN
CIRCUIT..
11.3 . . . . 37
DETAILS OF CONNECTION TO SPINDLE DRIVE UNIT . . . . . . . . . . . . . . . 12.2. 49
DETAILS OF CO
DETAILS OF CONNECTION TO MANUAL
DETAILs
oF connection To
DETAILS OF CONNECTION OF ADDITIONAL REMOTE
DETAILS OF CONNECTION TO GENERAL-PURPOSE
DETAILs
oF
DETAILs oFl/oslGNALs
DETAILs oFslGNALs
DETAILs
oF siGNALs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20.2...............127
Dl~ENsloNsln mm
DIMENsloNsin
DIRECT-IN
CONNECTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
DusT-pRooF construction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
E
ENVIRONMENTAL condition
EXTERNAL
NNECTION TO TAPE READER
REMoTE I/o
DIREcT-lN
connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16.2 . . . . . . . . . . . . . . . . 6,
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13.2 . . . . . . . . . . . . . . . .
PULSE
GENERATOR . . . . . 15.2 . . . . 60
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17-2 . . . . . . . . . . . . . . . . 63
1/0
. . . . . 17.4.. 64
1/0
. . . . . 18.2 . . . . 67
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3..........,....239
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10-3 . . . . . . . . . . . . . . . . 26
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
~~ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
AppENDl~l_2 286
Agt . . . . . . . . . . . . . ...325
16- . . . . . . . . . . . . . . . . . 61
4.4
. . . . . . . . . . . . . . . . .
s . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
FEEDBAcK uNITcoNNEcTloN
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.4 . . . . . . . . . . . . . . . . 38
3.
. . . . . . . . . . . . . . . . . . . . .
54
12
1
5
1
INTRODUCTION
This manual describes the specifications for connecting YASNAC i 80 with machines, machine
interfaces and external equipment.
Necessary connections to be provided by the machine manufacturer differ depending on
CNC
the type of the
in accordance with the combination for standard cabinets and integrated units.
The programmable controller system (hereafter called PC) is installed in the YASNAC i 80
CNC cabinet. For details of the PC, refer to Instruction Manual for
(TOE-C843-11. 1)
cabinet supplied by Yaskawa.
Make additions or deletions of connections
YASNAC i 80 PC System
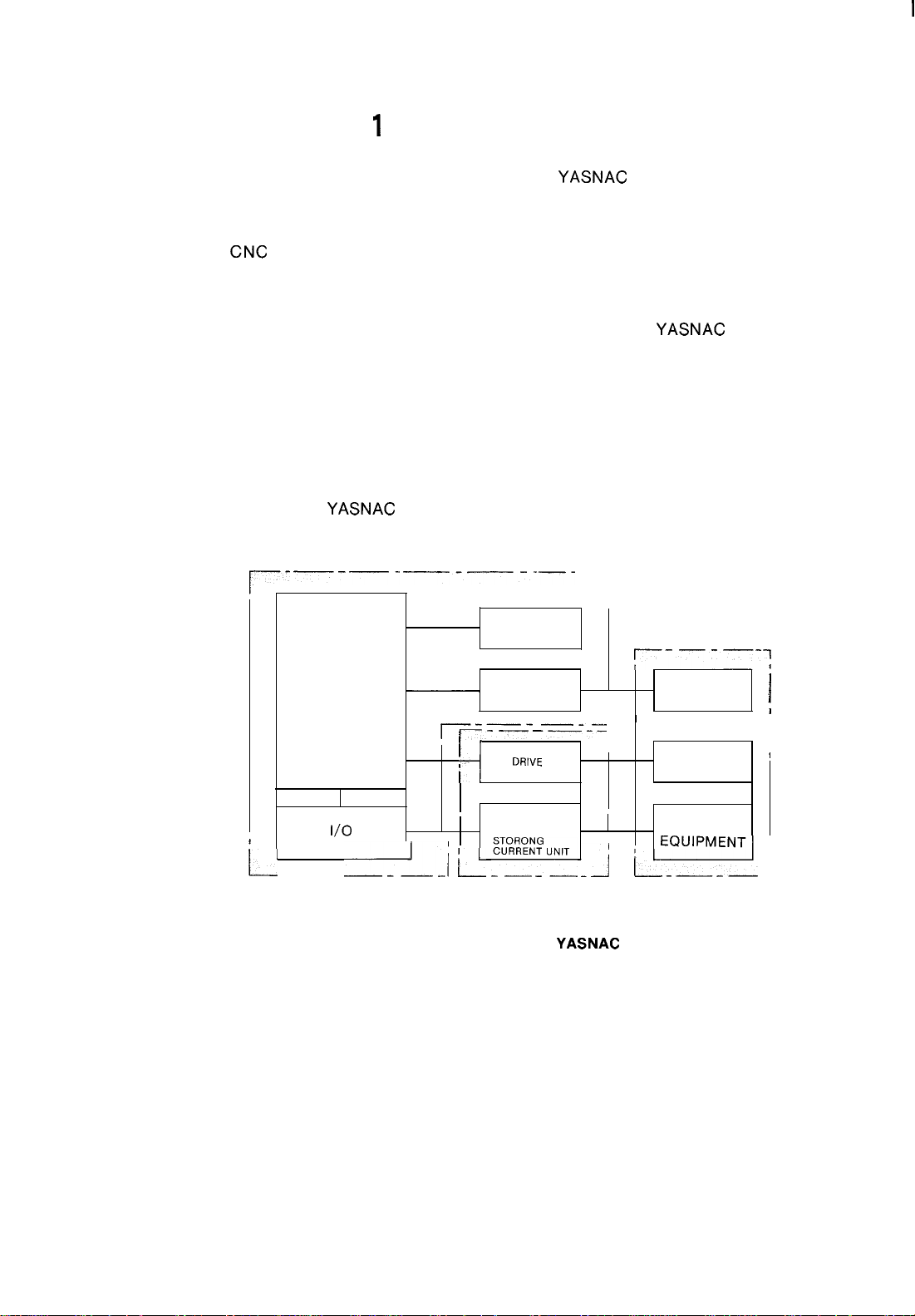
2 CONFIGURATION
2.1 SYSTEM CONFIGURATION
The system configuration of YASNAC i 80 is shown below.
YASNAC
~. —-—-
I
CPU MODULE
—______
~__.
q
CRT
OPERATORS
PANEL
FEED
SERVO
UNIT
—..
SPINDLE
ORIVE
UNIT
I
i
1
MACHINE
~-—.—-
FEED
MOTOR
~
SPINDLE
MOTOR
1
1
~
j
t
l.-
1/0
.__
—_—_i L
Fig. 2.1 System Configuration of
MACHINE
CONTROL
STATION &
!.!”:
STRONG CURRENT
UNIT
I
_J L
YASNAC
I
i 80
MACHINE
:::N:
_i
3 ENVIRONMENTAL CONDITIONS
The following are conditions for the location where the control panel is installed by the machine
manufacturer. Therefore, when working on design, observe the “CONDITIONS FOR CABINET
CONSTRUCTION DESIGN” described in Section 4 and design the unit so as to meet the
following conditions.
3.1 AMBlENT TEMPERATURE
● During operation: O to
. During storage and transport: –20 to
Even if the ambient temperature is less than
direct sunlight or near heat sources or in the open air.
i-45°C
i-60°C
-i-45°C
, do not install the control panel in
3.2 HUMIDITY
o
Under normal conditions: Relative Humidity: 10 to 90% (non-condensing)
3.3 VIBRATION
0
During operation :0.5 G or less
3.4 OPERATING ENVIRONMENT
Do not use in dusty environment or where cutting oil/fluids or organic solvents are present in
the air.
7
4 CONDITIONS FOR CABINET CONSTRUCTION DESIGN
Take the following into consideration when cabinets and pendants used to contain the CPU
module and other units are designed.
4.1 MOUNTING CONDITIONS
(1) Make sure that the cabinets are of a totally-enclosed type. (For details, see Par. 4.4. )
(2) Design the cabinet so that the difference between the average inner-air temperature and
ambient temperature is less than 10”C. (For details, see Par. 4.2. )
(3) Install a fan inside totally-enclosed cabinets to improve the internal cooling efficiency and
to prevent localized temperature increases by circulating air inside the cabinets. (Rule of
thumb is: The velocity of the circulating air should be greater than 2m/s on the surfaces of
the printed circuit boards of the units) Forced air should not blow directly on the printed cir-
cuit boards.
(4) Seal the cable openings, doors, etc. completely.
(5) Since the CRT display on the CRT panel deflects due to magnetic influences and collects
air borne dust due to high-voltage operation, special precaution is required. (For details, see
Pars. 4.4 and 4.5. )
(6) The units that are exposed to the cabinet surfaces are dust-proof. However, do not install
them in locations
where cutting fluid and cuttings may directly splash on them.
(7)
Mount the units so as to allow easy checking, removal and reinstalling during maintenance
work.
(8) For mounting the servo unit, see Section 5.
(9) For mounting the spindle drive unit, read the instruction manual of the spindle drive unit.
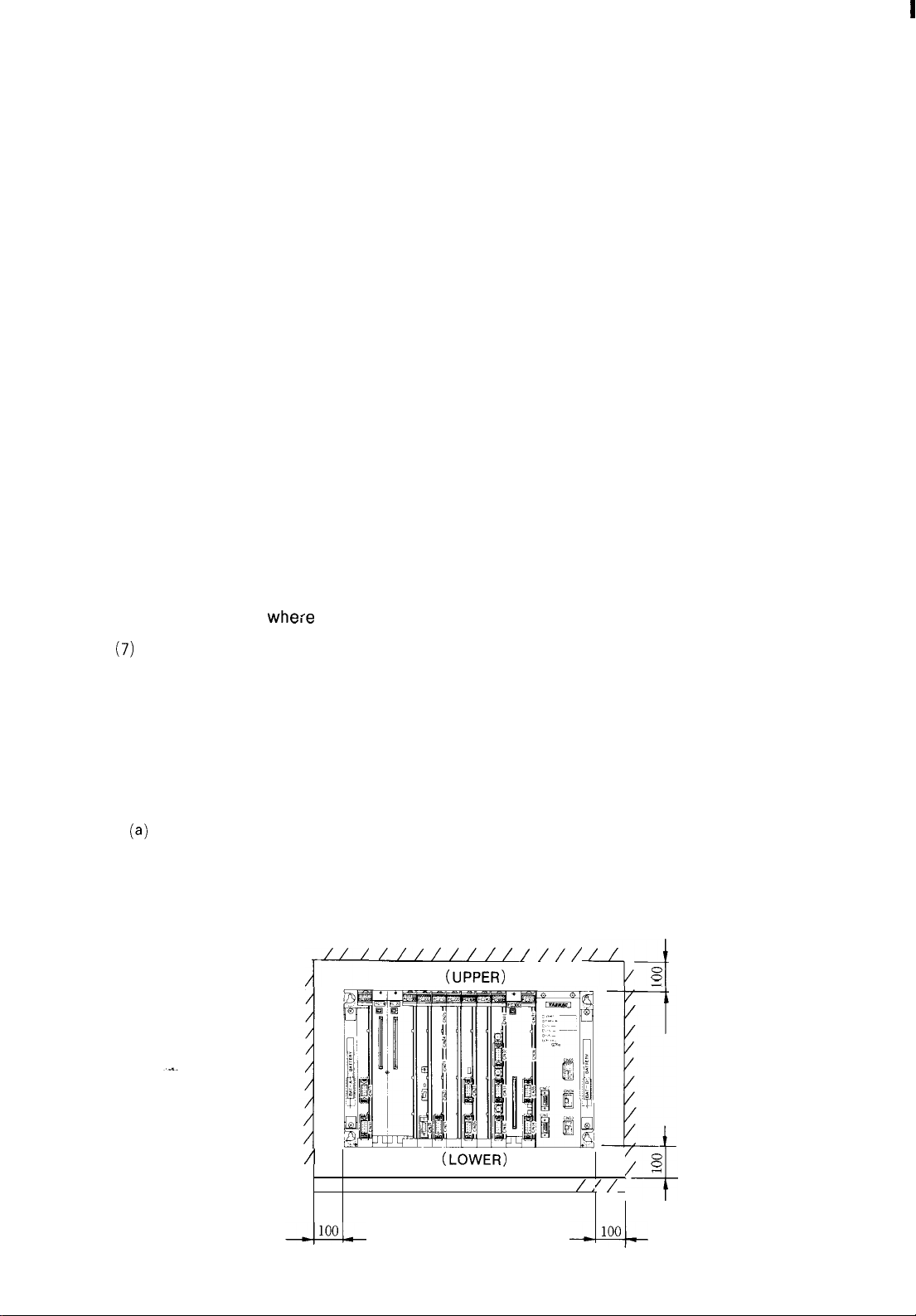
(10) Precautions for Mounting CPU Module
Observe particularly the following points when mounting the CPU module.
(a)
Mount the unit in the direction shown in the figure below.
(b) Provide space of more than 100 mm in the upper section and 100 mm in the lower section
of the unit for better ventilation and easier maintenance.
100 mm in both right and left sections of the unit for easier replacement of the battery.
Also provide space of more than
////////////
J’”
(UpPER)
“ka
~
/
// ///////////////
(LOWER)
Q
Fig. 4.1 Mounting Space
“>
A
s
‘+
“
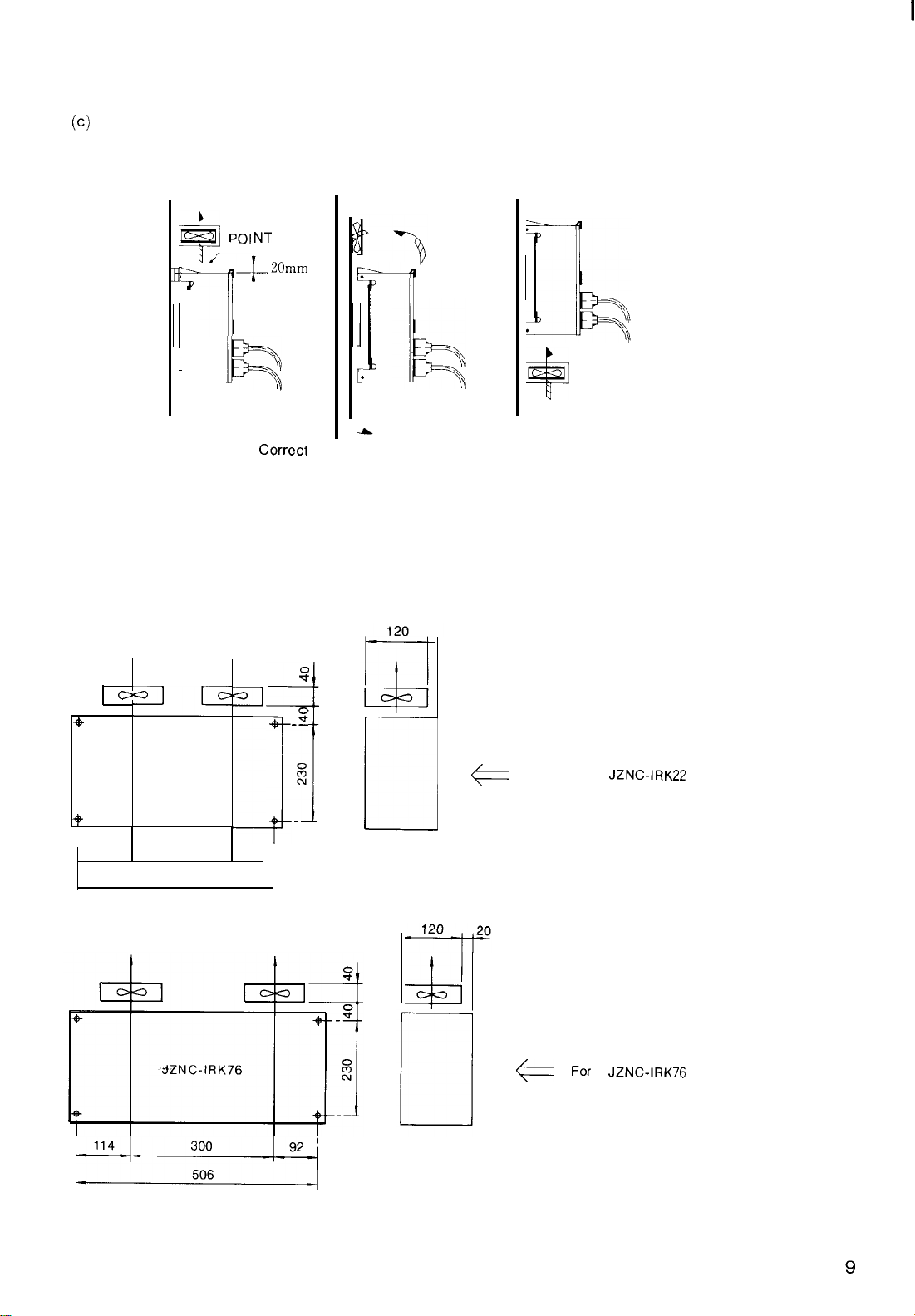
(c)
Allow forced air to circulate inside the unit at 2 m/s.
on the surfaces of the printed circuit boards.
VENTILATING DUCT
MEASURING
Pol NT
*
/
1
(d) Mounting Cooling Fan
Fan recommended 4715PS (120” X40 ‘ )
~,,mm
*
—\
—.
R
(a)
c~rre~t
\
\
—\
\
—\
k
\
Fig. 4.2
Be careful not to blow air directly
Forced Air
Blown Directly
+
(b) Wrong
+
+
114
JZNC-IRK22
0
“
200
1
404
0
*
.2
:
;
7
90 ‘
,
20
+
n
JZNC-IRK22
For
~
For JZNC-lRK76
~
Fig. 4.3 Mounting Cooling Fan (Dimensions in mm)
4.2 CABINET DESIGN FOR HEAT FACTORS
The cabinets used to contain the CPU module and other units should be designed so that they
are of totally-enclosed construction and the difference between the inner-air temperature and
ambient temperature is less than 10”C.
consideration.
In designing the cabinets, also take the following into
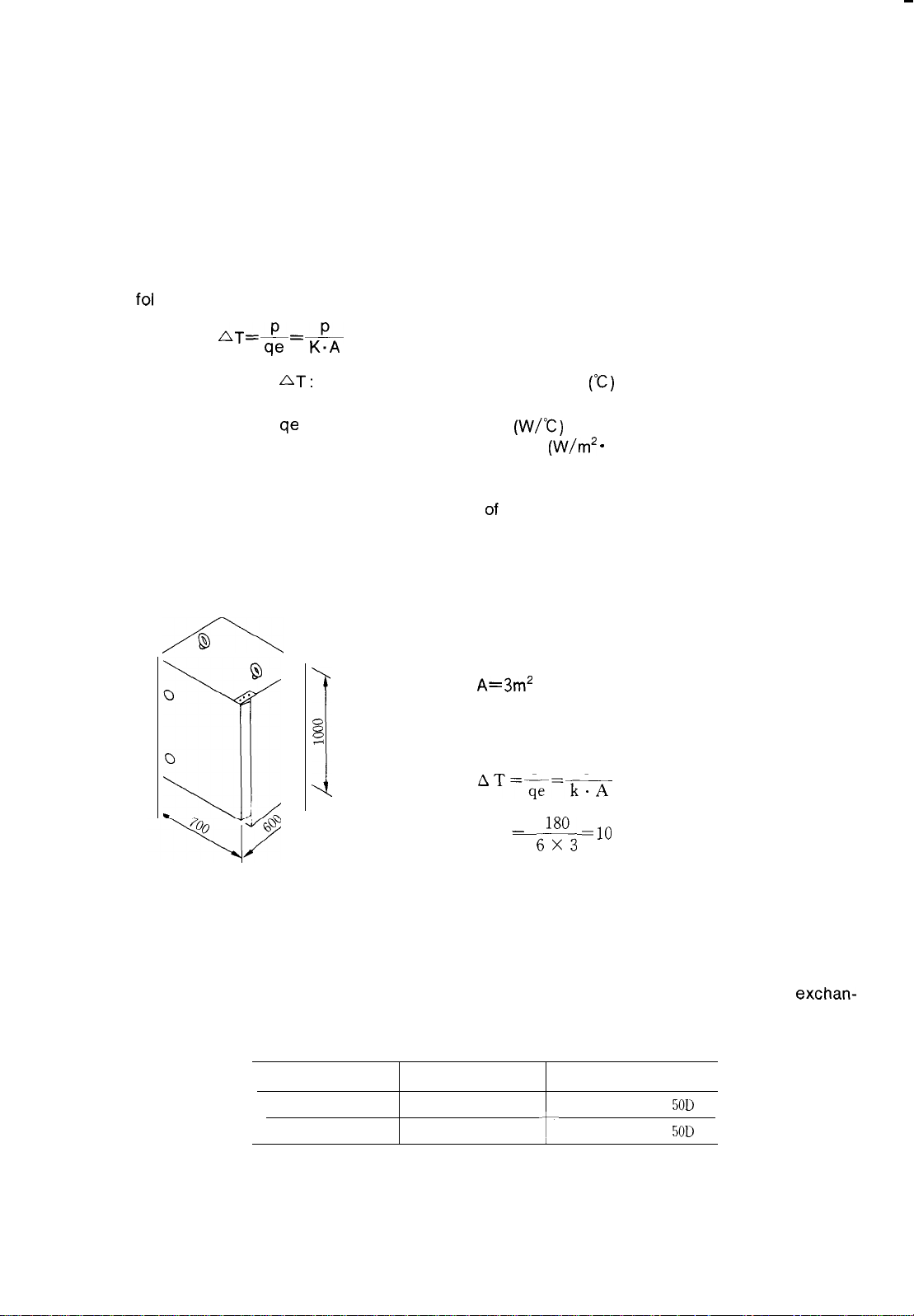
(1) Air Temperature
Air temperature rise inside the cabinet made of sheet metal is
foi
lows:
~T=~=~
(Example) Allowable Heat Value inside Cabinet with a Circulating Fan
Rise inside Cabinet (Average Temperature Rise)
qe K-A
AT:
Air temperature rise inside cabinet
P: Heat generated by electric appliance (W)
qe
: Cabinet heat transmission (w/°C)
K: Sheet metal-metal transmission
20
6W/m
4W/m
A: Effective radiation area
C : With a circulating fan
20
C : Without a circulating fan
of
cabinet (mz)
Surface area of the cabinet through which heat can be radiated.
(Surface area that contacts other objects is excluded)
(“C)
(W/m2 “
“C)
A
A=3m2
o
o
~
Where the heat value generated inside the cabinet is
180W :
generally determined as
PP
1
Since the value calculated above is less than the allowable temperature rise of 10”C, the
design works just fine. When the value is more than 10”C, a separate method for
quired.
(2) Cooling Capacity
When a circulating fan installed inside the cabinet is not sufficient, the following
gers are available.
of Heat Exchanger
Heat Exchanger Cooling Capacity
REX1 550
—
HEATEX02
‘T=~=k.
–
~ly3
100WX1O”C 295W X 890H X
250W X 10”C
~
A
=10
(“c)
Dimensions
50D
440W X 924H X
50D
cooling is re-
exchan-
heat
10
The heat value shown in the cooling capacity column represents the allowable heat value
when air temperature rise inside the cabinet is less than 10”C.
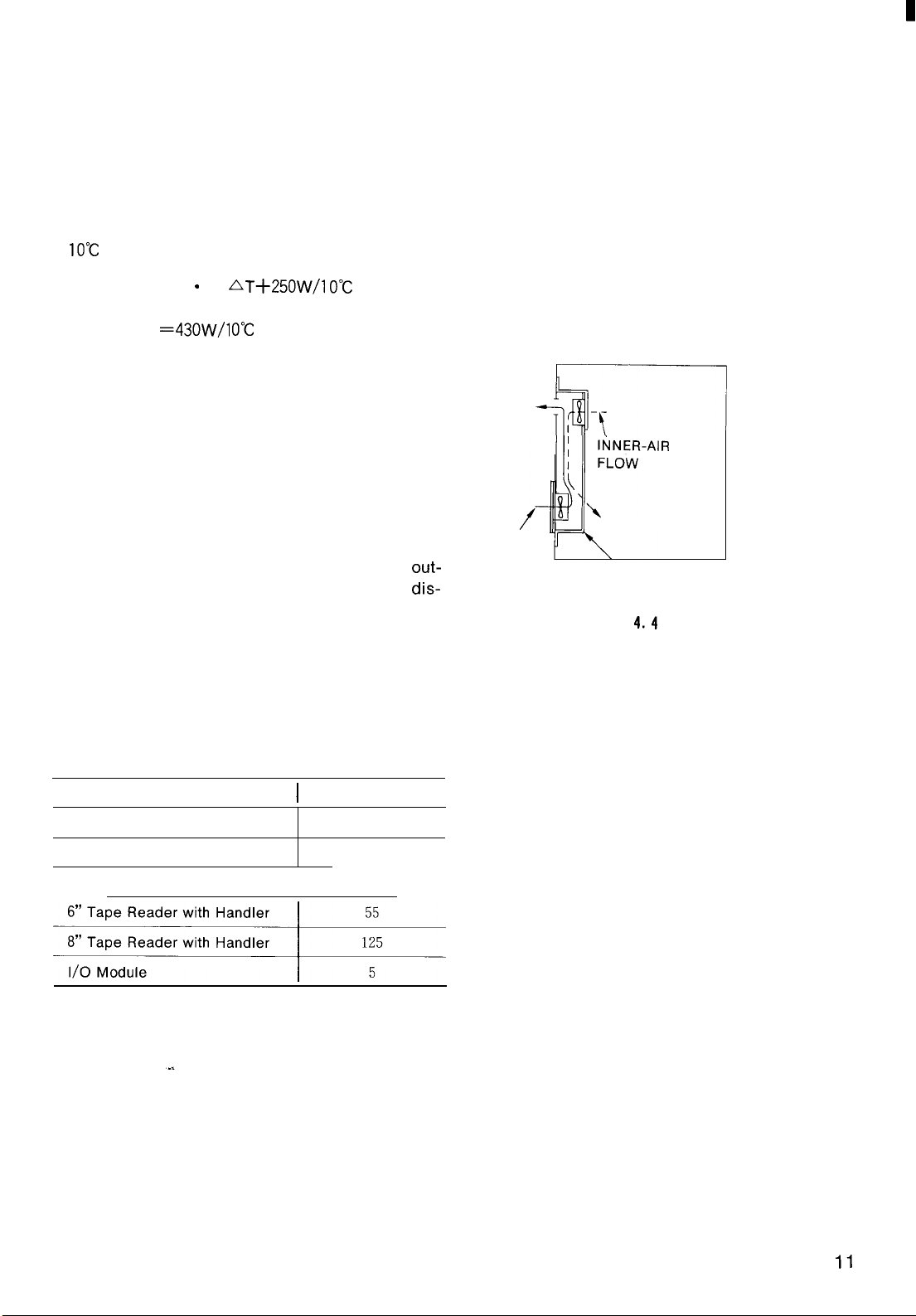
(Example) Allowable Heat Value inside Cabinet with Heat Exchanger
The heat value inside the cabinet required to keep the inner-air temperature rise below
10°C
with the Heat Exchanger HEATEX 02 installed inside the cabinet as in the example (1) is:
o
A ●
P=k
~T+250W/1 O°C
=6 X3 X1 O+25O
=430w/1 O“c
Accordingly, the heat value should
be less than 430w.
UPPER
(3) Installation of
Heat Exchanger
A heat exchanger is installed to the cabinet made
by a machine tool maker.
Shown above is an example of heat exchanger
installation.
Install the heat exchanger so that the
inner air is taken in from the upper section and
discharged from the lower section while the out-
side air is taken in from the lower section and dis-
charged from the upper section. (For details regarding installation, see Appendix 16. Dimensions
of heater exchanger. )
4.3 HEAT VALUES OF UNITS
(1) NC UNIT
Unit
CPU Module
9“ CRT Operator’s Panel
Tape Reader
I
Heat Value (W)
70
to
160
20
I
25
.m
OUTER-AIR
FLOW
\
H EAT
LOWER
EXCHANGER
4.4
Fig.
CABINET
NOTE :
The heat value of the CPU module varies with option addition
11
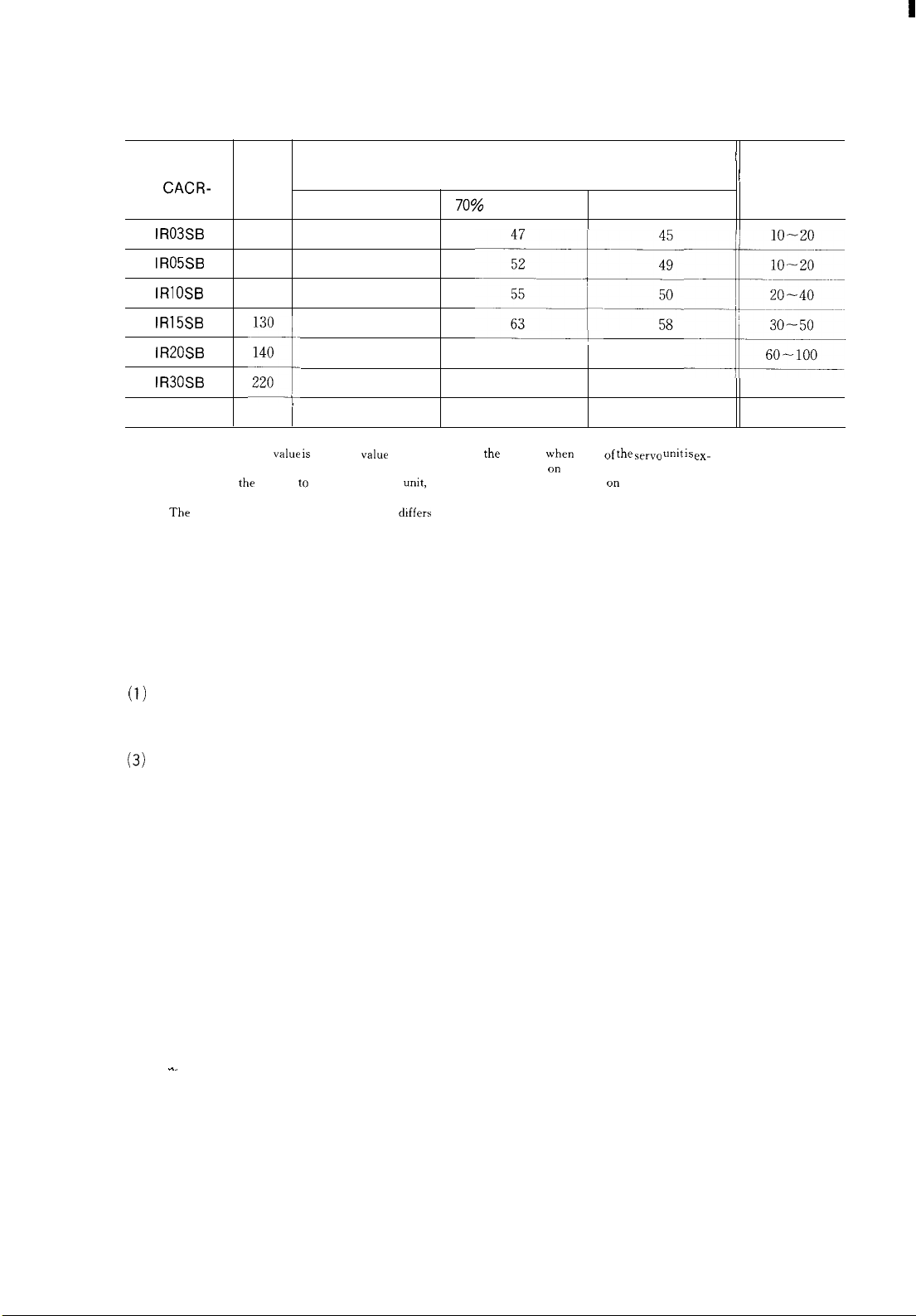
(2) SERVO UNIT
Total
Servo Unit
CACR-
IR03SB
IR05SB
lRl OSB 110
IR15SB
IR20SB
IR30SB
—
IR44SB
NOTE :
1 ) The internal heat
posed outside the cabinet and the outside air of more than 2.5 m/s blows on the fin.
2) In designing
of the machine, hut the load factor of 70% is considered normal.
‘rhe heat value of the regenerative resistance
3)
Heat
i
Value
‘
(w)
100% Load Factor
70
100
130
140
220
q
270
I
value is
the
cabinet to contain the servo
112
the heat
50
58
61
70
73 65
97 82
value
Internal Heat Value (W)
70%
Load Factor
-63
92
remaining inside the
unit,
the load factor differs depending on the specifications
differs
depending on the operating conditions.
cabinet ~he” the fin “f
50% Load Factor
=;+
60
71
79
the servo
““it is
~g
~x.
[
Regenerative
1
Resistance
(w)
60–100
80–120
100–140
4.4 DUST-PROOF CONSTRUCTION
Particles floating in the air (dust, cuttings, oil mist, etc.) may cause malfunction of the CPU module and the inner parts of the other boards (particularly CRT) to be mounted inside the cabinets
the machine manufacturers design and build.
should be such that it does not allow dust, etc. to enter inside.
The construction of the cabinets, therefore,
(1)
The cabinets should be of totally-enclosed construction.
(2) Seal the cable openings with packing. (See Fig. 4. 5.)
(3)
The door and the back cover should be securely sealed with packing. (See Fig. 4. 6.)
(4) Special caution is required for the CRT unit as it operates at high voltage and collects dust
in the air.
The following points should be observed with regard to the pendant box used to
install the CRT unit.
(a) Seal the cable openings, door, back cover, etc. with packing to eliminate gap,
(b) Packing is attached on the surface where the CRT unit is to be mounted. Use the pen-
dant box as it is.
(5) Seal all gaps.
(6) Oil mist easily settles on the ceiling and enters the cabinets through screw holes. Special
precaution, therefore, should be made using oil-proof packing, etc.
-.
12
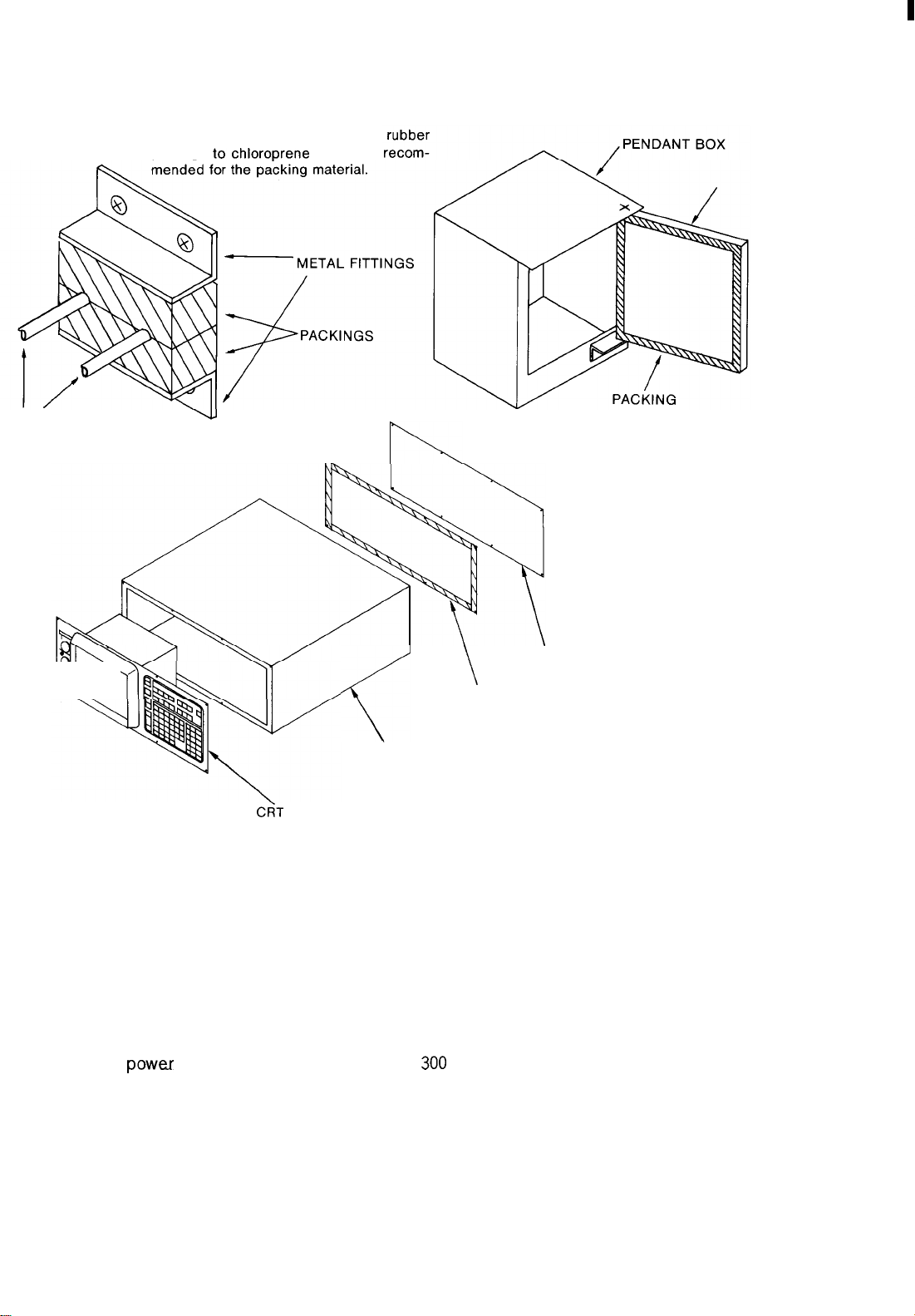
(Reference) Neoprene sponge
(belongs
tochloroprene
rubber) is
CABLES
v
Fig. 4.5 Cable Entrance
CRT UNIT
.
h
<
PENDANT BOX
Fig. 4.7 CRT Unit
\
PACKING
Fig. 4.6 Door
REAR PLATE
Packing
4.5 PROTECTION FROM MAGNETIC INFLUENCES
The CRT display may be deflected due to external magnetic influences. Sources that generate magnetic fields (such as transformers, reactors, fans, electromagnetic switches, solenoid re-
powu
lays, AC
cables) should be kept about
tance of 300 mm is a rule of thumb and the optimal distance may differ for each setting. Therefore, full precaution should be given to location of the above components that generate magnetic fields and determine the final layout after checking the condition of the CRT display.
300
mm away from the CRT display. This dis-
13
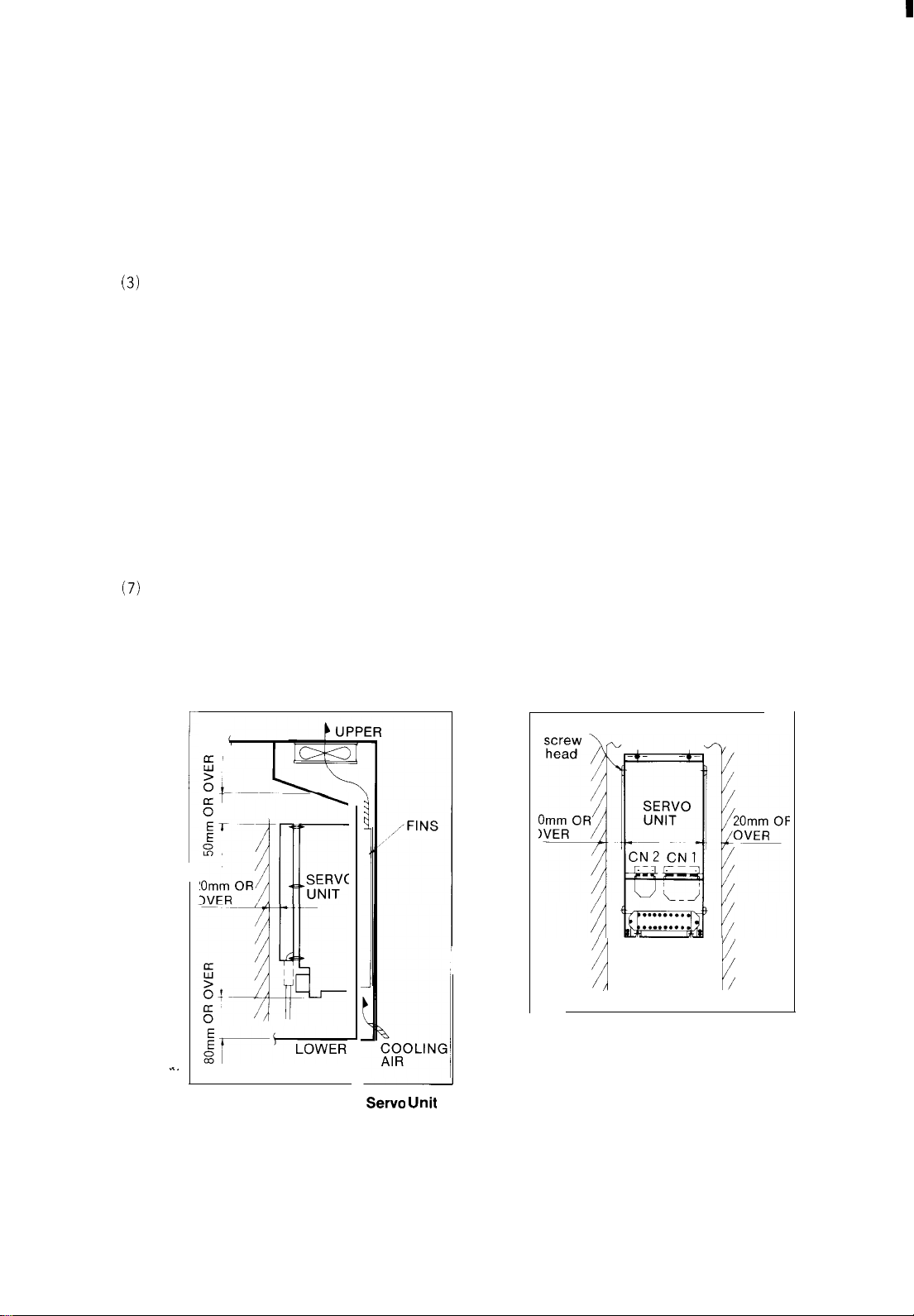
5 PRECAUTIONS FOR INSTALLING SERVO UNIT
(1) The servo unit is a wall-mounted type and should be secured with screws or bolts vertically
(so that the printed circuit boards can be seen from the front). (See Fig. 5.1. )
(2) Mount the servo unit so as to allow easy checking, removal and reinstalling during mainte-
nance work.
(3)
The servo unit generates some amount of heat.
lower sides when mounting other units and components so that heat will not saturate the inside the unit. (See Fig. 5.2. )
(4) Expose the radiator fin outside the cabinet and allow the outside air to blow on it to reduce
internal thermal loss. (See Fig. 5.1. ) This will help reduce the capacity of the heat exchanger
even when it is required.
(5) When circulating air inside the cabinet, do not allow forced air to blow directly on the servo
unit (to prevent dust from collecting on the unit).
(6) The regenerative resistor generates heat.
the regenerative resistor and do not place it near components easily affected by heat because a high temperature develops with extremely high frequency in use such as rapid transverse, start and stop.
(7)
Clamp the detector (P. G) cable that enters the servo unit to the ground plate inside the
cabinet with the cable clamping fixtures. (See Clamping Cables and Grounding Cable Shield
described in Par. 6.2. ) Make sure to clamp the cable because it is necessary to operate the
system properly and to protect it from malfunctioning due to noise
Allow for some space in the upper and
Full precautions should be given to location of
From ,
14
. .
Fig. 5.1 Mounting of
(Side View)
Servo Unit
v
/
Y
Fig. 5.2 Mounting of Servo Unit
(Front View)
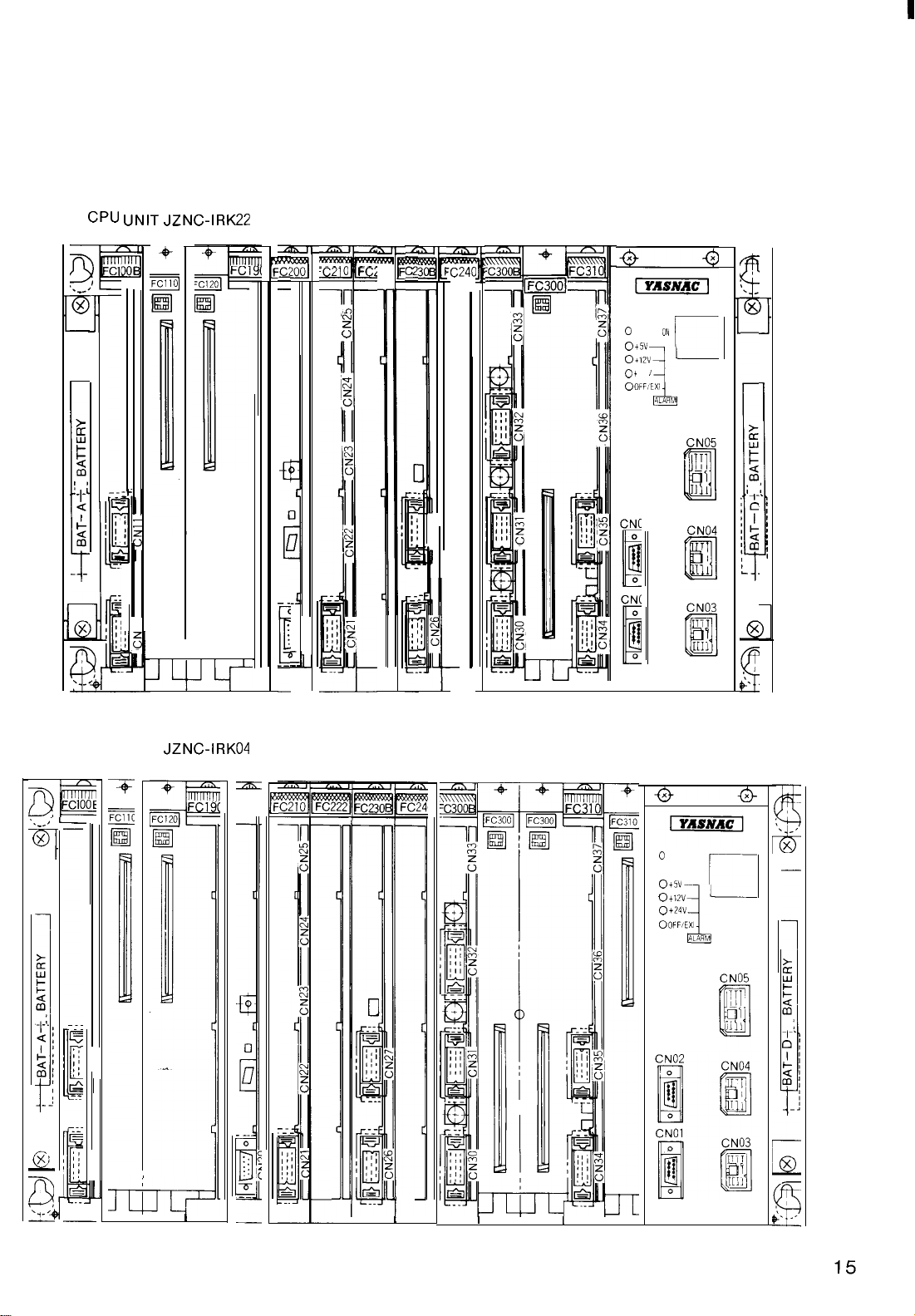
6 CABLE CONNECTION
6.1 LAYOUT OF CABLE CONNECTORS
(a)
CPU UNIT JZNC.IRK22
@
‘. ...
a
—
[
>
lx
w
+
1<
m
,,
,..1
a
L
a
m
c
‘C21
O
FCZ
1:
6
T
x
‘c240
—
O SOURCE
O
POWER
ON
0+5V
0+12V
0+
24v
00FFEXI
ALAR),!
1
E
(2) CPU UNIT
FC1OOE
D@
-
‘.
-.,
%
~
Jl+l~
JZNC-IRK04
—
0
SOURCE
o POWER ON
O+5V
E
O+12V
o+24v
OOFFIEXI
ALARM
1
I
I
1 1
I
I
I
I
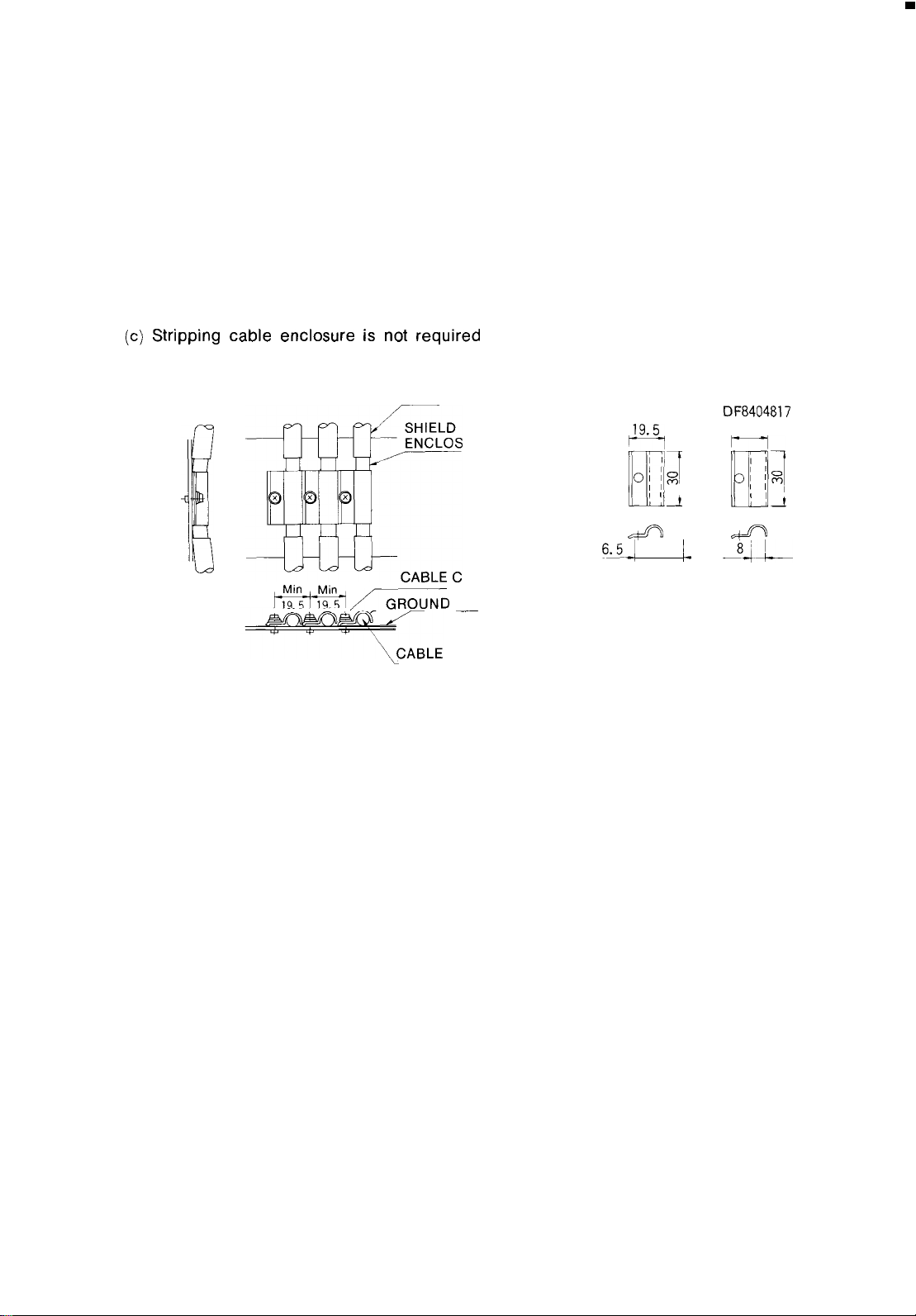
6.2 CLAMPING CABLES AND SHIELDING CABLES
Of the cables connected to the YASNAC, clamp those that need shielding to the ground plate
securely with the cable clamping fixtures as shown in the figure below.
not only as cable support but also as cable shielding.
In ensuring safe operation of the system,
it is extremely important that you clamp the necessary cables without fail.
(a) Strip part of the cable shield as shown in the figure below to expose the shield enclosure.
Press the exposed part onto the ground plate using the cable clamp.
(b) Mount the ground plate near the cable opening.
This clamping serves
(c) stripping cable enclosure is not required
for non-shielded cables for clamping.
CABLE
URE
1[
LAMP
m
~D
Fig. 6.1
PLATE
——
Shielding Cables
TYPE 1
DF8401485
II
o!
~:,
~
‘
6.51
TYPE 2
DF8404817
19.5
II
7
‘4
~_
‘0
;W
~1
(1
A
+
—8JL
16
(a)
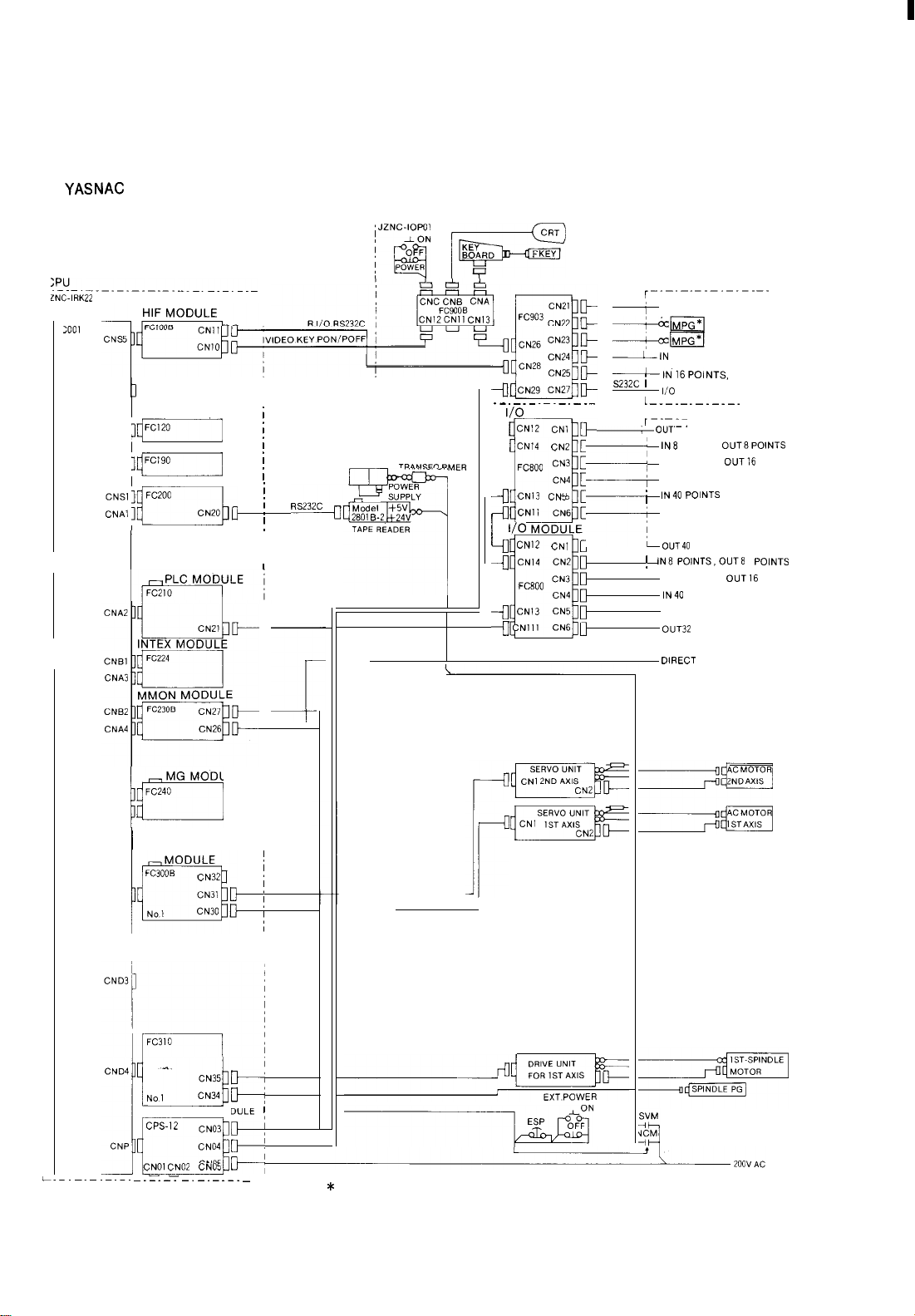
YASNAC
7 INTERCONNECTION DIAGRAM
i 80L (For Lathes)
OPERATOR’S PANEL
,_. —. —-—. — .—. —.
;??-. _._.
ZNC-IRK22
:001
_._.
_.-. ___________
CNS4
b
FILE MODULE
CNS3
I-
SMEM MODULE
CNS2
ID
SMONMODULE
~~~
~Gn
1
~
I
I
~
~
I
I
1
APE HANDLER
‘
‘s232c1~~:!F
T
I’z”a
I
l-. –.–. –.–. –..
TRAN5F. RMER
TAPE READER
P
.-. —.— .— ._. _ ._
1/0 MODULE
-B
CN14
cN’
3
FCEOO
cN
~ CN13 CN5
c
+
~
Q
CN4
[
CNII CN6 GUT” POINTS
u!
1/0 MODULE
CN12 cNl
CN14 CN2
FC800
CN13 CN5
CNII CN6
n
CN3
CN4
.!
-
I
-1
OPERATION PANEL
FOR MACHINES
~–.
~
“m
*B
~m
~lN
~lN16POl
s232c i
1/0
l–-–. –.–. –.–.
POWER SUPPLY
,-----
_OUT
IN8 POINTS, OUT8POINTS
1“24 POINTS
IN 40 POINTS
;
IN40POINT’
0UT40
!
IN8POINTS,0UT8 POI”T5
IN24 POINTS, 0UT16 POINTS
IN40 POINTS
IN40 POINTS
0UT32
I
OIRECT
1– _._. _. –-_._._._
–.–. –.–. –.–.–.
48
POINTS
NTS,
UNIT
40 POINTS
0UT32POINTS
-.-. –
OUT16
POINTS
POINTS
IN
-
POINTS
MG MODULE
FC240
CNB3
CNO1
~m
I
AXISCONTROL
MODULE
FC300B
CND2
~ml
CND4 -
u
POWER SUPPLY MODULE
CNP
CNOICN02
1
L. —. —. —. —.—. — .=. —= —. —. —.—. —
Ea
No 1
N
O
I
CPS-12
c“”
CN31
CN30
CN35
CN34
CN03
CN04
c“05
ii
.—J
!
1
Fig. 7.1
*
Manual pulse generator
-
lr
17
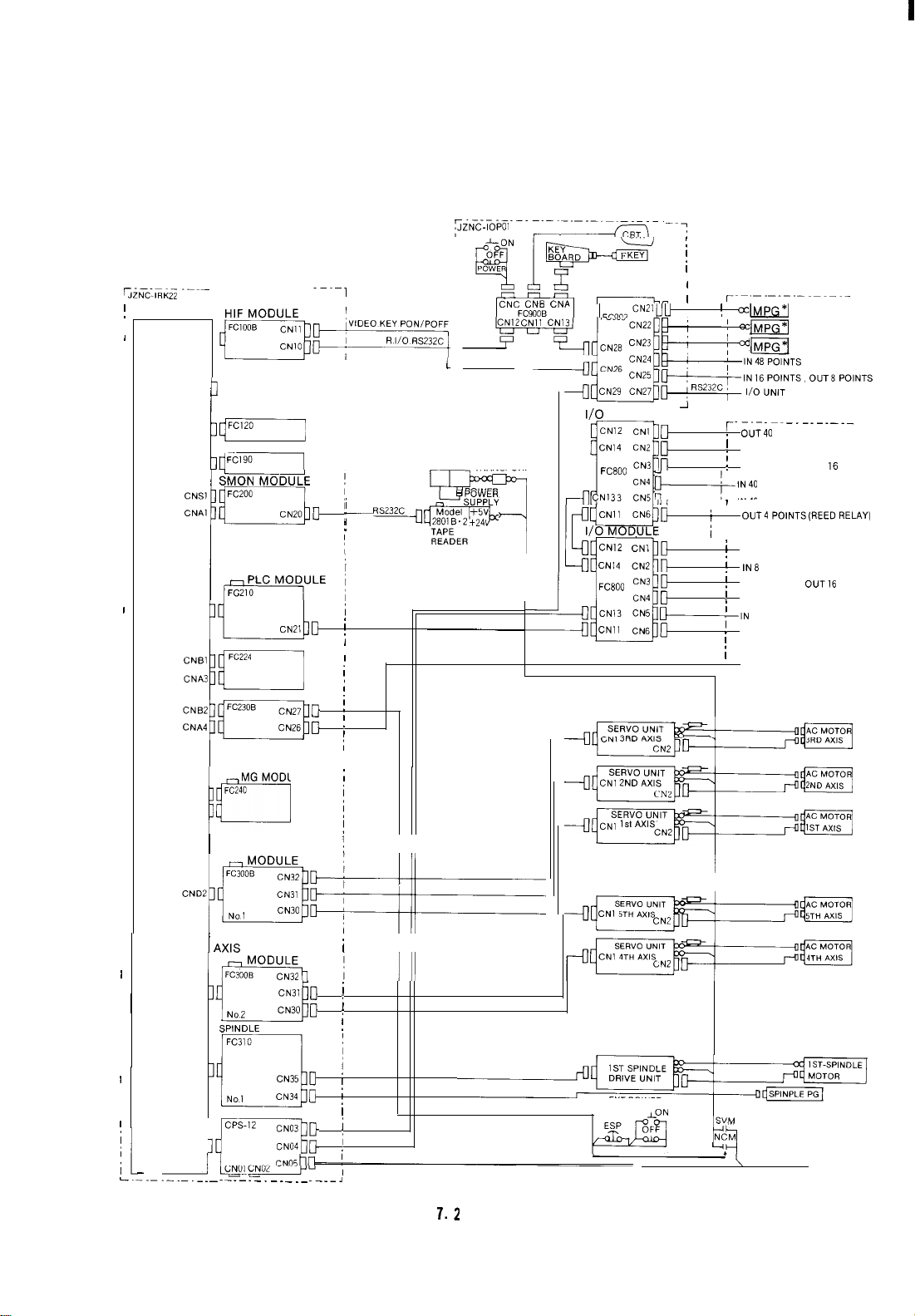
(b) YASNAC i 80M (For Machining Centers)
CPU
~~~:~K2; -–-—
~ BACK BOARD
I
FCOO1
1
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
1
I
—
Q. —. —. —. —._. — . ___________
-------------
HIF MODULE
CNS5
]
G-
CNS4
h
FILE MODULE
n
CNS3
SMEM MODULE
CNS2 d
Fc~I
1
S_fiE
~J~nu
1
CNA2
‘u,
INTEX MODULE
~~~
~m i
MMON MODULE
‘;:
~m: ~
MG MODULE
FC240
CNB3
CNOI
~m
AXIS CONTROL
I
I AXIS
CONTROL
CND3
‘M:
SPINOLE
MODULE
FC31 O
-- CND4
CNP
No I
‘a!
POWER SUPPLY MOOULE
IH[
CN35
CN34
—.
-–-–1
~
.___,
‘s232cu2!&vw
q
~
I
;
~
~
~
~
I
I
i
TAPE HANDLER
TAPE
READER
—
I II
I II
* Mannal pulse generator
Fig. 7.2
OPERATOR’S PANEL
~ZN–C--iOP~l ”–-–-–- –”—-–”–~-–”
,Oii”
q~
1
L.–. –.–-–. –._
TRANSFORMER
[CNC
—
CNB CNA(
-=
g
‘1 1=.nnocN2’UU
1/0 MODULE
~ CN13
1/0 MODULE
Um:
I
~
CN13 CN5
-u!
~=
~.
CN12
CN14 CN2
FC800
CN3
CN5
n
Q4B
CN12
CN14 CN2
FC800
c“’
CNII CN6
EXT POWER
CN1
cN4
CN1
CN4
–-;
i !
~~lN40
:
~
zIN
~
OPERATION PANEL
I
FOR MACHINES
~._. –. —.–. –-–-_._
I
J
~----
!
j
!
/
1.,/,”
-
.
,,,
NCM
b~
‘U
OUT40 POINTS
IN8 POINTS OUT8 POINTS
IN24 POINTS, OUT
POINTS
IN 40
POINTS
‘-----------
16
POINTS
0uT4p01NTs(REEDRELAy)
OUT 40 POINTS
IN8 POINTS OUT8 POINTS
IN24 POINTS, 0UT16 POINTS
1“ 40 POINTS
40 POINTS
OUT 4 POINTS (REED RELAY)
DIRECTIN
18
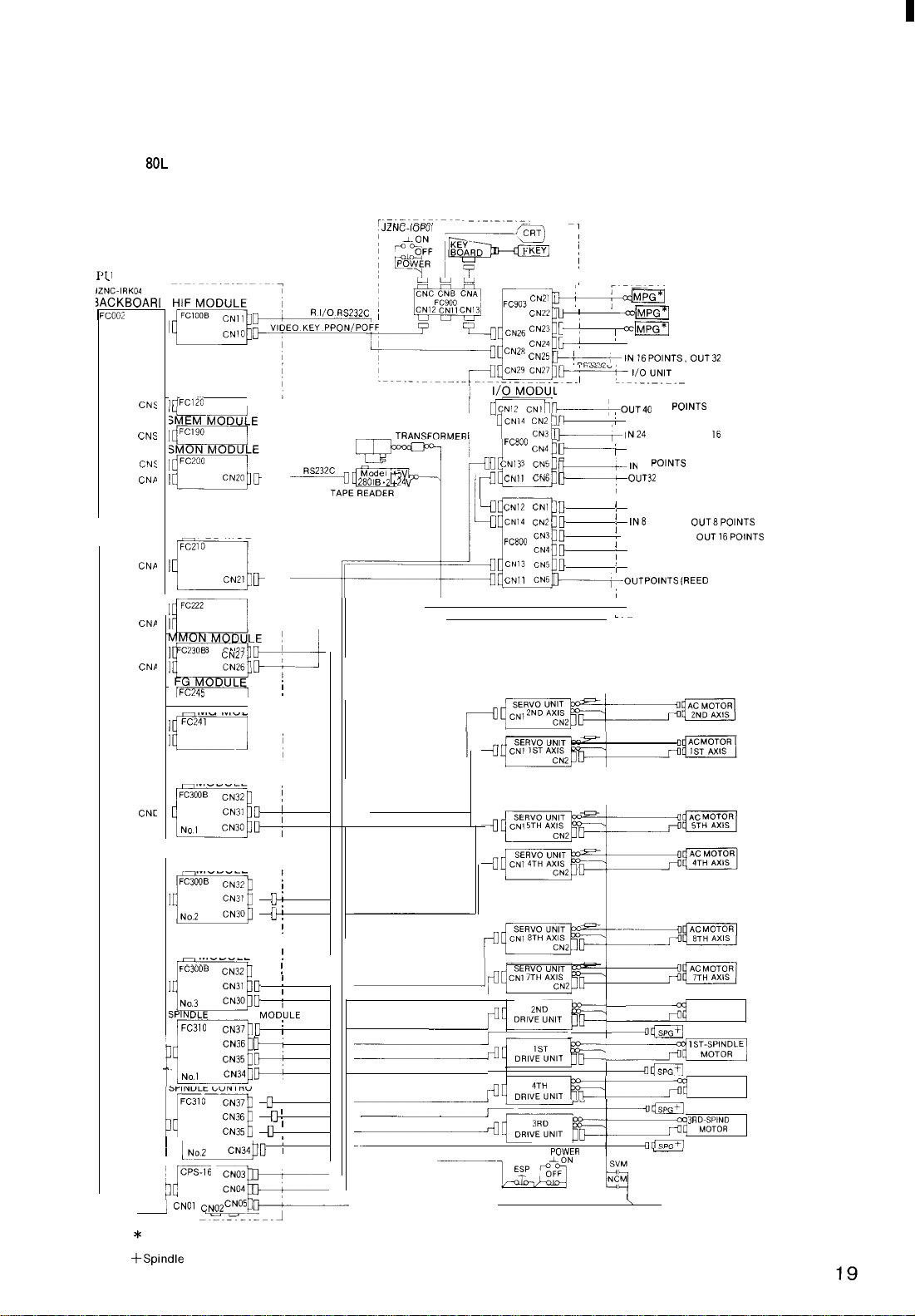
(c) YASNAC i
8(IL
(For Multiaxis Lathes)
OPERATOR’S PANEL
~j2NE:16pfi .-.. ._=; i__;i.
_ .–. – –,
. .
IZNC-IRK04
IACKBOARI
I FCO02
HIF MODULE
CNS
n“-’
CNS
I
FILE MODULE
lri FC120
CN:
CNS
CN$
CNfi
FC21 O
CNA
‘D
INTEX MODULE
CNE
CNP
In
CNF
1 FCZSO’3
CNfl
~p
FC245
1
CNE
l@V
CN[
FC300B
CN[
1
NO
n;
FC300B
CN[
N02
‘D
FC300B
CN[
NO 3
‘D:
SPINOLE
~n
CN05
NO I
‘u
/
SPINDLE CONTROL MOOULE
FC31 O
CN06
Ir-n
~
POWER SUPPLY MODULE
CPS-16
CNP
L/— g
I
L– _ _______
CNOl CN02cN05 ~
*
Mannal pulse generator
+Spindle
+....,0
PLC MODULE
CN21
~
M
CN27
‘w
CN26
~
DULE
‘MG MODULE i
I
i
AXIS CONTROLI
MODULE
CN32
CN31
CN30
I
~
AXIS CONTROL!
MODULE
CN32
CN31 o
CN30
AXIS CONTROL!
MODULE
CN 32
CN31
CN30
CONTROL
[N-D
cNo3
.~..
MOO’ULE
CN36
];
CN35
Ji
}!
CN34
CN37 il !
CN36
CN35
D
cNo4
~
–.d
pulse generator
R1/0RS232C
VIOEO KEY
TAPE HANDLER
RS232C
.’”3B
,
1
i
~ ~
;
!
!
;
;
o !
:
~
~
g:~p
i
‘c
PONIPOFF
Model
2801B.2 Z4U
TAPE REAOER
t
.~
~c
-
Fig. 7.3
UUu
CNC CNB
CNA
FC900
CN12 CNIICN13!
TRANSFORMEfl I
5V
I
d’
FC903CN2’ ~
CN22
%
CN26
::::,1
CN2fi
CN25 D*—
p.?N?!N:._t+:!?!!’T._
1/0
MODULE
i =~-~OuT40
flCN14
CN2hfl
CN3
FC800
~ CN)3 :5
CNII CN6
u
CN12 CNI
c
CN14
L
CN2
FC800
CN3 ,
CN4
CN13 CN5
CNI I
cN6
““~~*
.RI;RN,T
d[
DRI;::NIT
EXT
L—-,
~
“
-m
~
“m
IN 48 POINTS
IN16POINTS,0UT3Z POINTS
‘~ _____
~—Tl
~lN
~~OUTPOINTS
~
PDWER
POWER SUPPLY
,-----
~ IN8 POINTS OUT8 POINTS
N24
POINTS OUT 16 POINTS
;
IN40 POINTS
40 pOINTs
0UT32 POINTS (REED RELAY)
OUT 40 POINTS
IN8 POINTS, OUT8POINTS
– IN24 POINTS OUT16POINTS
;
IN 40 POINTS
IN 40 POINTS
;
DIRECT IN
I
..—
-
~-
~
u-
,=
k
(
pOINTs
— 200V AC
__
-
-
(REEO
RELAY)
2ND-SPINDLE
MOTOR
I
ST-SPINDLE
MOTOR
4TH-SPINDLE
MOTOR
3R fi-~TIJ:
LE

8 POWER SUPPLY CONNECTION
8.1 POWER
CPU
—
HI
-—
172039.1
s
?
3
G
4
SUPPLY
L___-_l
.——.———i
8.2 DETAILS OF
CPS
CN5-5
CN5-I
CN5-3
CONNECTION TO EACH UNIT
CN5
5
R
6
7
n-
C05
172025-1
POWER SUPPLY
Fig. 8.1 Power Supply Connection
I
SINGLE-PHASE
200vAc/220vAc ~
50
Hz/60Hz *2Hz
300VAC (CPS-12)
450VAC
(cPs-16)
15%
NOTE : The power supply is designed to function normally even in
the event of 1 /2-cycle or shorter momentary power loss or
1
-cycle or shorter 50% vokage drop,
Fig. 8.2 Details of Power Supply Connection
-.
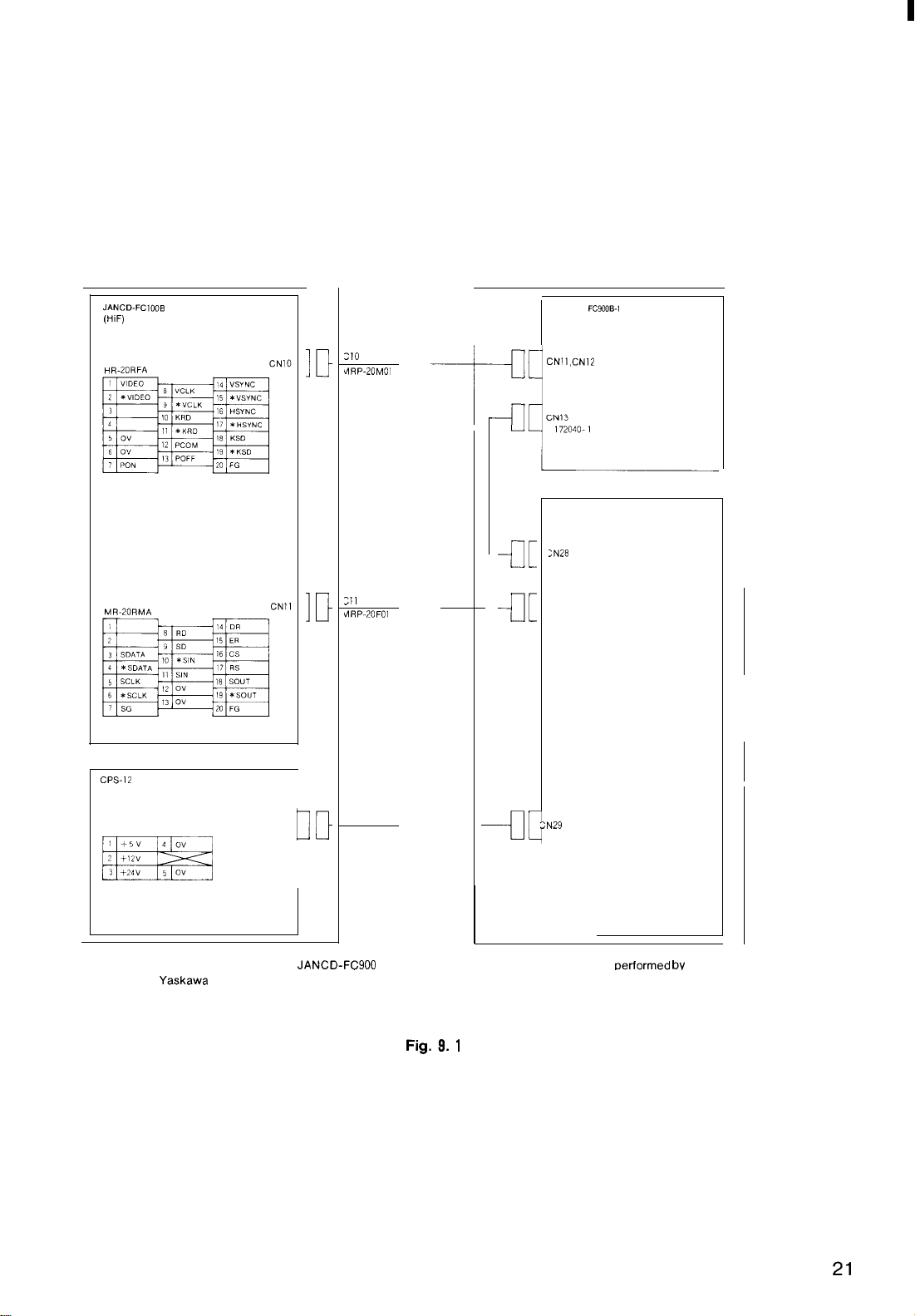
9 CONNECTION OF OPERATOR’S PANEL
9.1 CONNECTION DIAGRAM
9.1.1 CONNECTION 0F9” CRT OPERATOR’S
JANCD.FCIOOB
(HIF)
:10
4RP-20MOI
:11
tiRP-2oFol
PANEL
~~
OPERATOR’S PANEL
I
I
I
1
JAN CD-
~
I
CNII,CN12
MR-20RFA
JANCD-FC903
:N28
;N26
MR-20RMA
FC900B-I
I
CPS-12
172040-1
=
CN03
I
DD
C03
172026- I
+L
:N29
L
Note: The connection between JANCD-FC900 CN13 and JANCD-FC903 CN28 has been
Yaskawa
172037
DeflOrmed bv
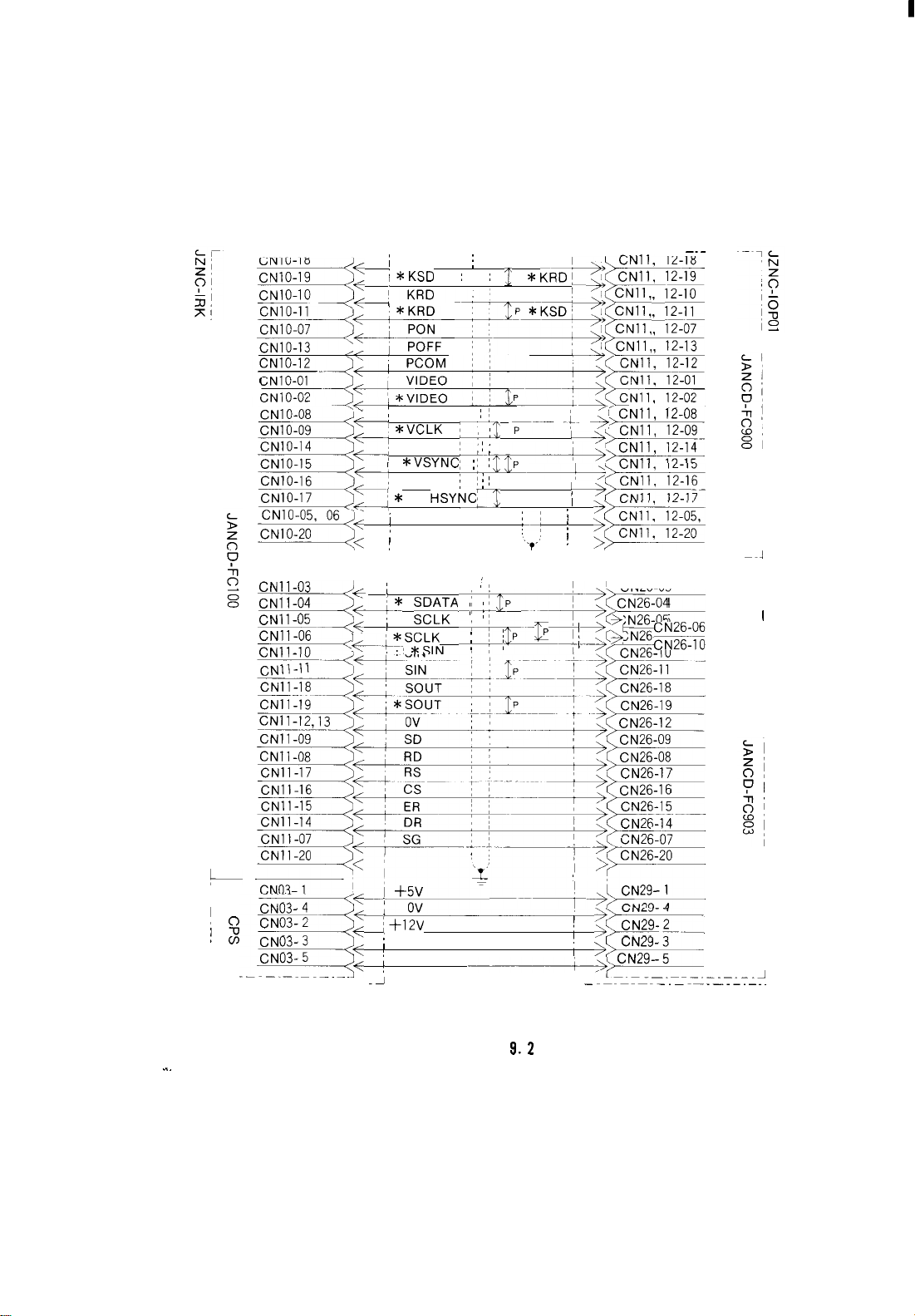
9.2 DETAILS OF CONNECTION OF OPERATOR’S PANEL
9.2.1 CONNECTION OF 9“ CRT OPERATOR’S PANEL
I
I
I
*
I
~o
1:
I
I
L-—.
CPU
CN1O-18 ‘
CN1O-19
CN1O-10
=.
-+%;,
[
CN1O-O8
CN1O-O9
CN1O-14
CN1O-15
CN1O-16
~,
CN1O-17
-
CN1l-03
CN1l-04
CN1l-05
CN1l-06
CN1l-lo
3;
Bgjjp
CN03- 1
CN03- 4
CN03- 2
CN03- 3
CN03- 5
..3
i
KSD ~
i*KSD
!KRD:
~
;
VCLK :
‘
*VCLK
~
VSYNC :
I *VSYNC : :
!
HSYNC
j*
HSYNC P
I ‘v
I
I
I
I
SDATA ;
+
+*
:::p
__.~*scLK
<
~*slN_
~
+5V
Ov
j+12v
;
+24v
0*4V
~
-1
:
‘TXKSD;
!;
— .. —.. —
~ :
;
,1
: ;
,,
~ ~
‘-E
>
~
:
:
~
:
;
:
KRD
P
* KR~
KSD !
‘
~–.– .;. < cN”~
~&
p
~
“E
~
:
i
?
~
~+
~p—
-+>
t’
~
P
;_ >
;
,,
—“”~
~
L
–.—.–.—.—–.—.::—..–::;.
,—. —- —..—. —
CN1l,
CN1l,
:!;
CN1l,
CN1l,
=
:;;;’ ;;;;;
12-18
12-19
~:o}
‘2-08
12-09
12-14
—.—
-
CN1l, 12-17
=-
:Gl=
L–-–. –-_._._
I
CN26-03
06
_.J
::;:::
;
::;:-:fi
CN26-19
CN26-12
:;;::;—
CN26-17
CN26-16
CN26-15
CN26-14
CN26-07
CN26-20
CN29- 1
CN29- 4
CN29-
2
CN29- 3
5
CN29-
‘k
OPERATOR’S PANEL
“1
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
22
Fig. 9.2
. .
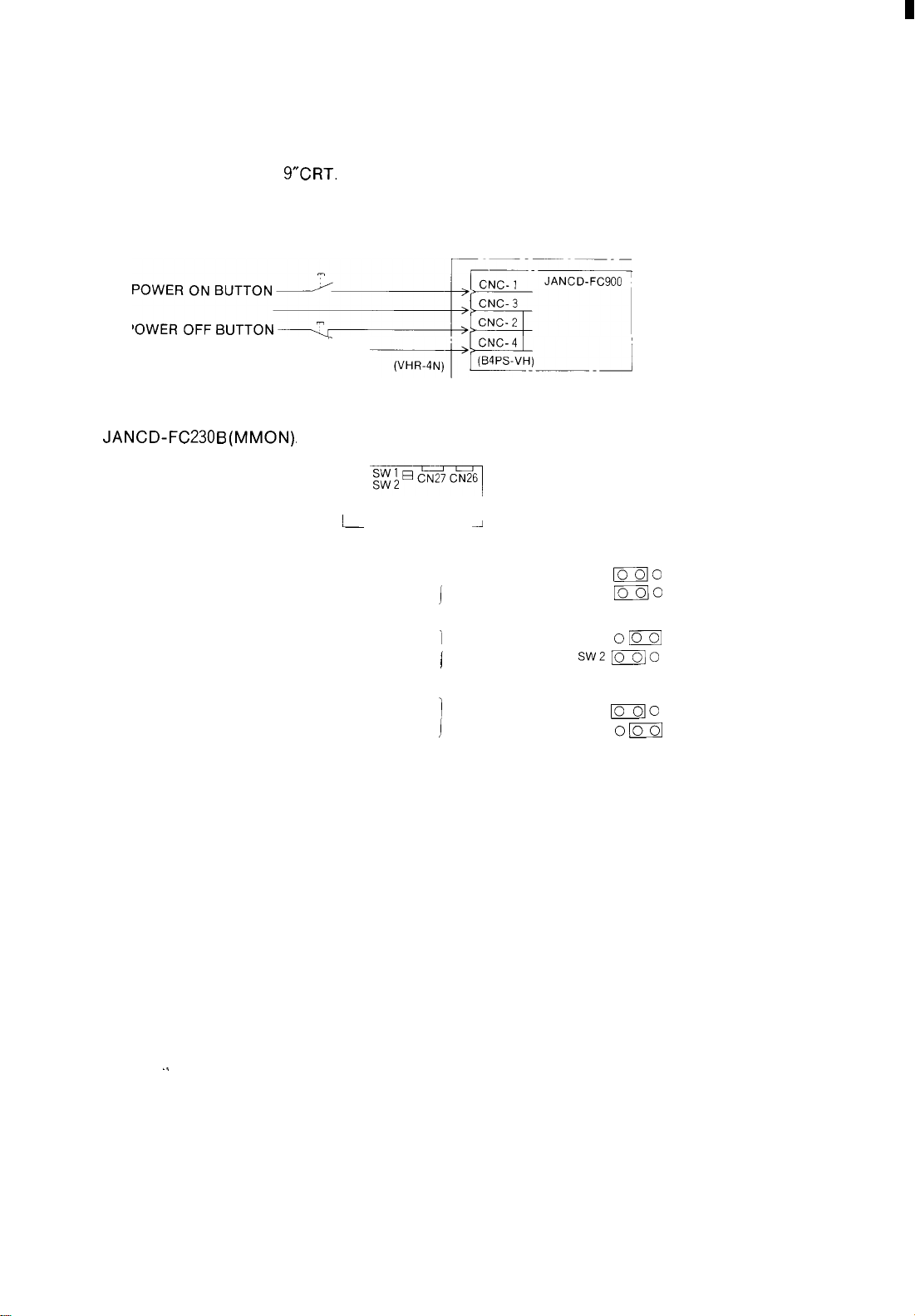
NOTES OF CONNECTION OF 9“ CRT OPERATOR’S PANEL
1.
We will provide wiring of the power ON/OFF switch for the NC operator’s station with
keyboard on right side of
9“CRT.
Use the following wiring method or remote power unit
ON/OFF switch for the separate type and vertical type. (See NOTE 2. (below).)
OPERATOR’S PANEL
POWER OFF BUTTON
‘OwERONB”TTON*E=c=;’
*B-—A
2. Power ON/OFF can be selected by
JANCD-FC230B
the
(MMON),
the following switches.
The switches are mounted in
r
L
EXTERNAL POWER ON/OFF
PANEL POWER ON/OFF
EXTERNAL POWER ON/OFF
PANEL POWER ON/OFF
EXTERNAL POWER ON/OFF
PANEL POWER ON/OFF
EFFECTIVE
EFFECTIVE
INEFFECTIVE
EFFECTIVE
EFFECTIVE
INEFFECTIVE
I
~
‘1
~
)
I
3. Factory setting before shipment: Panel Power ON/OFF “Effective”, External Power
ON/OFF “Ineffective”
Swl
SW2
Swl
swz~o
Swl
SW2
123
~o
~o
123
o~
123
~o
Om
. .
23
It)
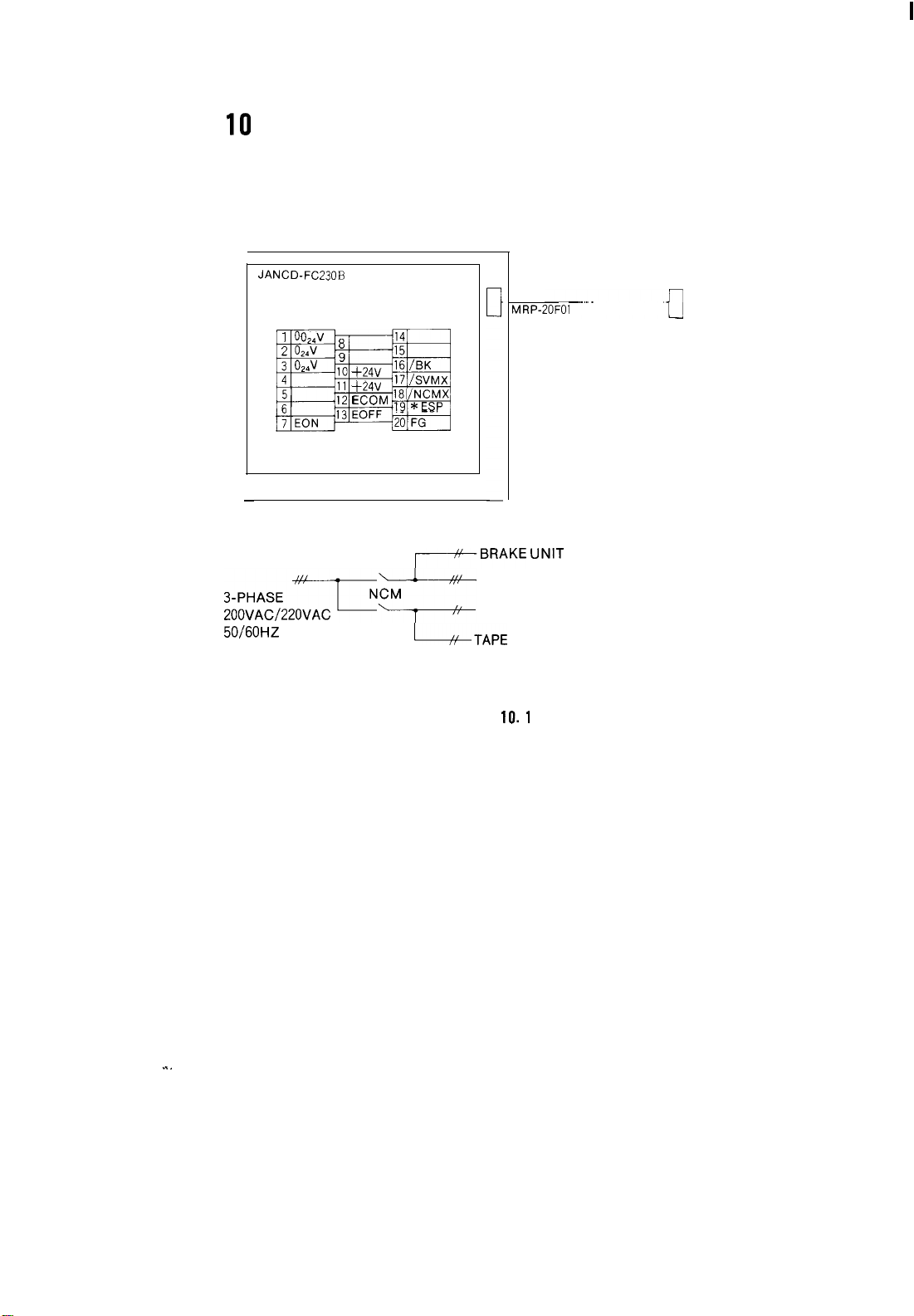
CONNECTION OF
INPUT SEQUENCE
10.1
CONNECTION TO EACH UNIT
CPU
JANCD-FC230B
MR-20RMA
1
O,,v
2
O*4V
3
024V
4
5
6
7 EON
m
—
MAIN CIRCUIT
;;;;;:;,,~~
50/60HZ
~
~
10
11
,2 ~coM 18/NcMx
13 ‘°FF 20 FG
+24V
+24V
(MMON)
14
15
16
17
19 *ESP
SVM
CN27
/BK
/SVMX
-BRAKE
&TAPE
[
C27
MRP-20F01
POWER ON
INTERFACE
‘NIT
FEED SERVO UNIT (MAIN CIRCUIT)
FEED SERVO UNIT (CONTROL CIRCUIT)
READER
Fig.
10.1
. .
24
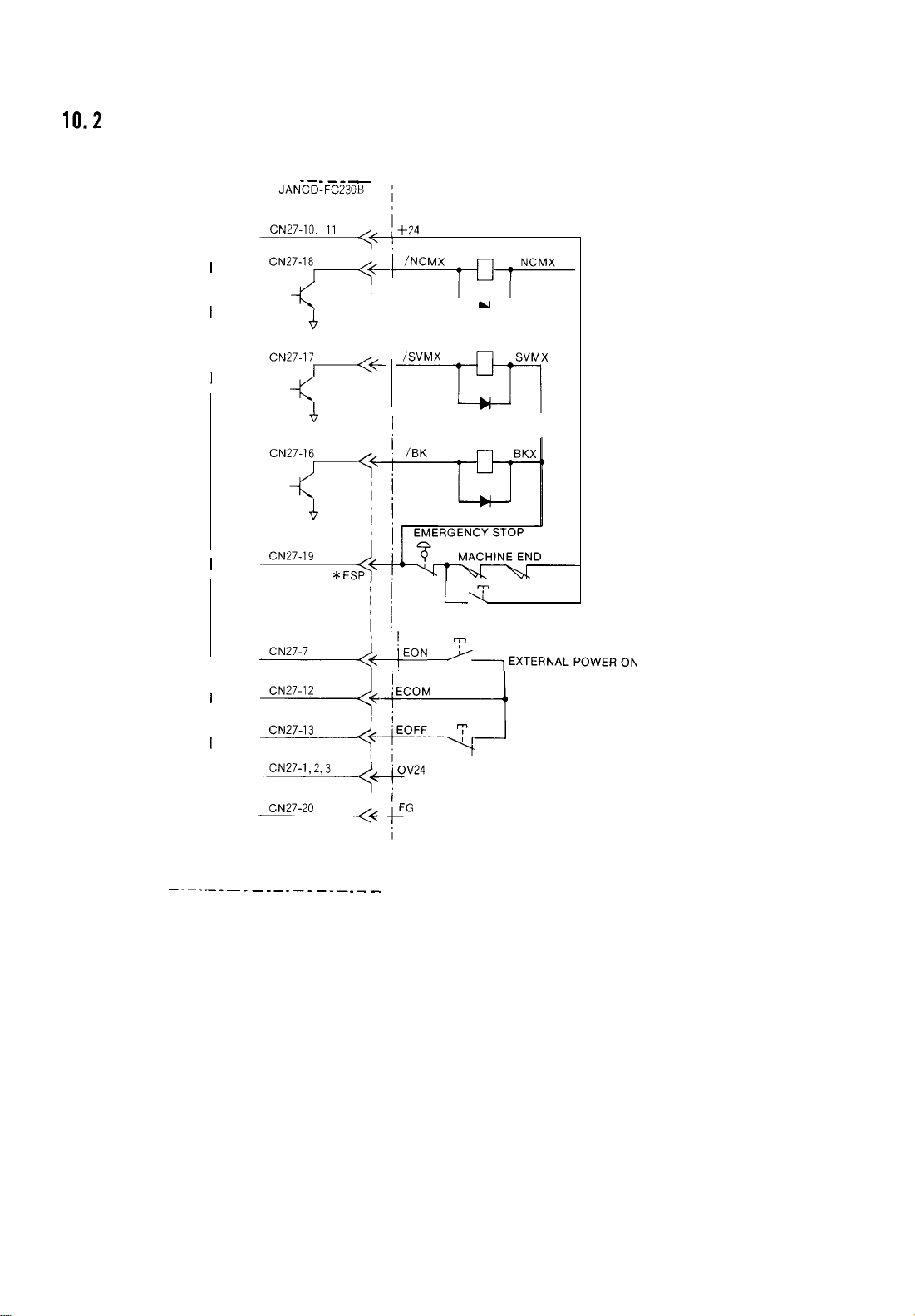
10.2
DETAILS OF CONNECTION OF INPUT SEQUENCE
CPU MODULE
—. ___ ._. _.___ .__— ___
.- —- —.—. —
I
,
I
I
I
I
I
I
I
.— -—-—
u
1
I
I
I
m
NC POWER ON
SERVO POWER ON
I
I
I
I
I
~:
+:+--
CN27-13
I
I
Yyv24
I
I
I
-y’
L._. _. —-_- —. _-—-d
—- —-—-— -—-—
Note : Use a miniature relay 24
and BKX. (We recommend the relay type MY-4Z made by OMRON. )
.—-—. —.
il
jl
<R
1
l-s
MACHINE END RELEASE
1’0” JTEXTER”ALPOWERO”
I
——
J
VDC for the relay of NCMX, SVMX
Fig. 10.2
BRAKE RELEASE
EXTERNAL POWER OFF
25
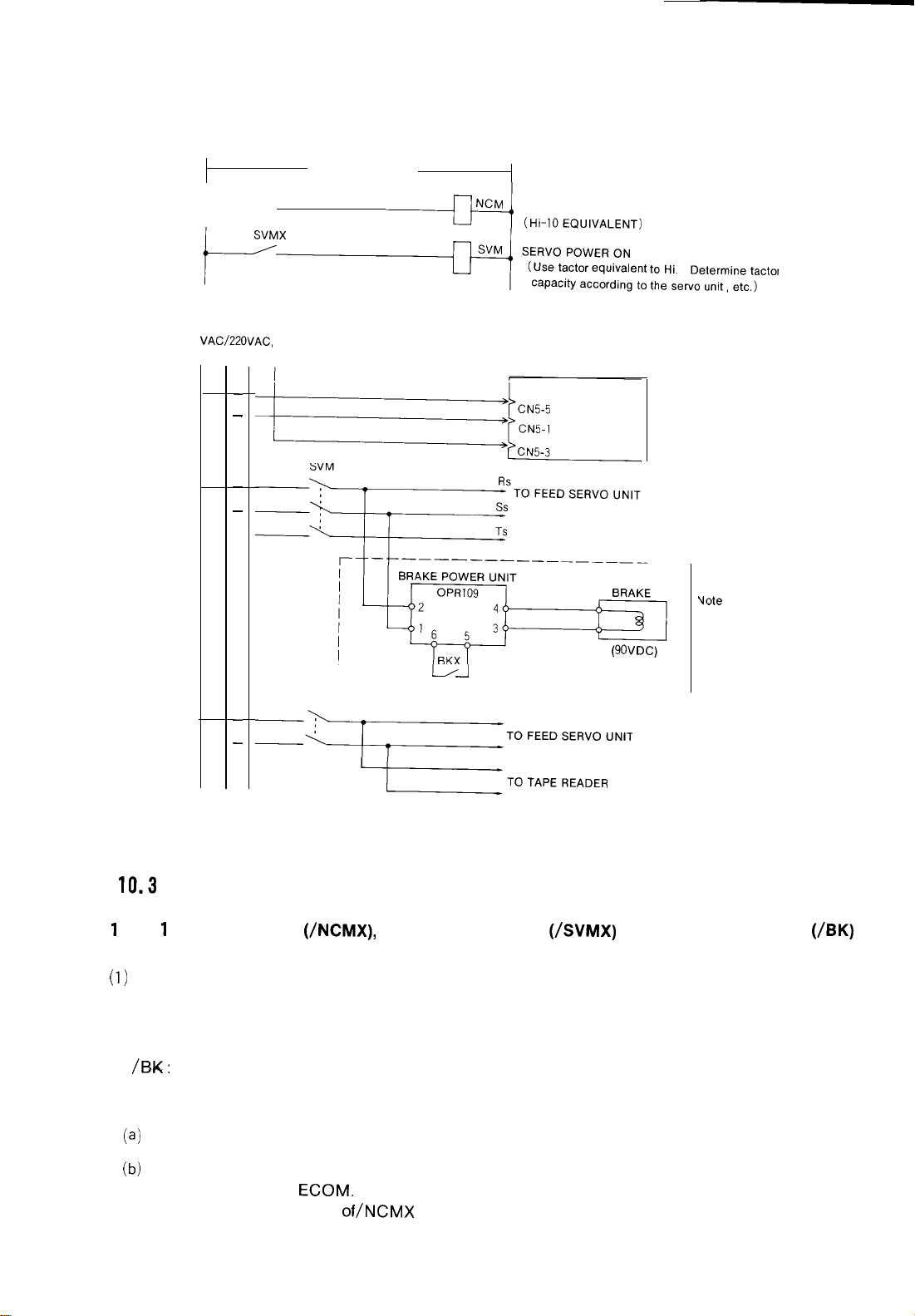
The connection example of the main circuit is shown below.
10OVAC OR 200VAC
NCMX
i--’
200 VAC/220VAC, 50/60Hz
RSTE
.
~}CN5-5
—
—
—
NCM
—
—
~
L––––––––––––_––– __– ___
LJ
NCM
NC POWER ON
H-OE.UIVALENT)
Cps
=~TOFEEDsERvO”N’T
Note
: Required only for using
holding brake.
The brake is built in the
motor.
26
*’OTAPEREADER
Fig. 10.3
10.3
DETAILS OF SIGNALS
1
().3.
1
NC POWER ON (/NCMX), SERVO POWER ON (/SVMX) AND BRAKE RELEASE
OUTPUT
(1)
/NCMX: This output is turned on when the logic circuit of the control is energized.
(2) /SVMX: This output is turned on when the servo unit is energized. With an external servo
unit, turn on the power supply when this signal is output,
(3)
/BK:
Output to release the retaining brake of the feed axis.
(4) The power supply turning on sequence is as follows:
(a)
Close the power supply main switch for the control
(b)
Either depress the POWER ON button on the NC operator’s station, or close the circuit
between EON and
energized, and the output
ECOM.
Then, the logic circuit and the servo control circuit are both
of/NCMX signals (NC power input and output) is activated.
(/BK)

With an external servo unit, design the the servo control circuit power input sequence so
that the circuit is energized at the output
of/NCMX signals.
(c) Again make the same power switching (depressing the POWER ON button or closing the
circuit between EON and
ECOM).
Now, the servo power supply is turned on, and the out-
put of/SVMX signals (servo power input and output) is activated.
With an external servo unit, design the servo power circuit power input sequence so that
the circuit is energized at the output
of/SVMX signals.
(d) /BK output is turned on by parameters after the servo is ready (in servo clamp condi-
tion). Release the brake unit with this signal.
(e) When the external circuit is ready after the circuit between/SVMX is closed, and the con-
trol becomes ready, close the MRD (machine ready) input of the
1/0 module. Then, RDY
is displayed on the CRT, and operation becomes possible.
POWER ON PB
OR EON INPUT
POWER OFF PB
ON EOF INPUT
* ESP INPUT
/NCMX OUTPUT
,sv~~
OUT,UT ~
SERVO READY
(INTERNAL coNDiTloN) I pARAfvIET
/BK
OUTPUT
MRD INPUT
\
\
\
\
J
I
I
pm
I
I
5400
I
\
I
\
\
\
$
\
I
i
I
I
u
\
b
I
PARAMETER
I
I
pm 5400
\
I
\
I
J
~
7~—
\
\
b
lx
I
I
I
I
I
<
ALARM CODE
‘3000.
’2190>
‘RDY>
‘3302,1
RESET KEY
ON
‘3000.
T
:
‘4
‘RDYq
Fig. 10.4 Time Chart of Power Supply Turning on Sequence
If). 3.2 EMERGENCY STOP (* ESP) INPUT
When the emergency stop input circuit (* ESP) is open, the control stops totally, the /SVMX and
/BK are turned off, and the emergency stop output (
* ESPS)
of general purpose 1/0 module is
opened.
10.3.3 EXTERNAL POWER ON- OFF (EON, EOF,
ECOM)
INPUT
The control can be switched on and off by external input signals, in the same way as the depressing of the POWER ON/OFF buttons on the NC operator’s station. When the circuit between EON and ECOM is closed, the logic circuit or servo power of the control is energized.
When the circuit between EOF and ECOM is opened, the logic circuit or servo power of the
control is deenergized.
27
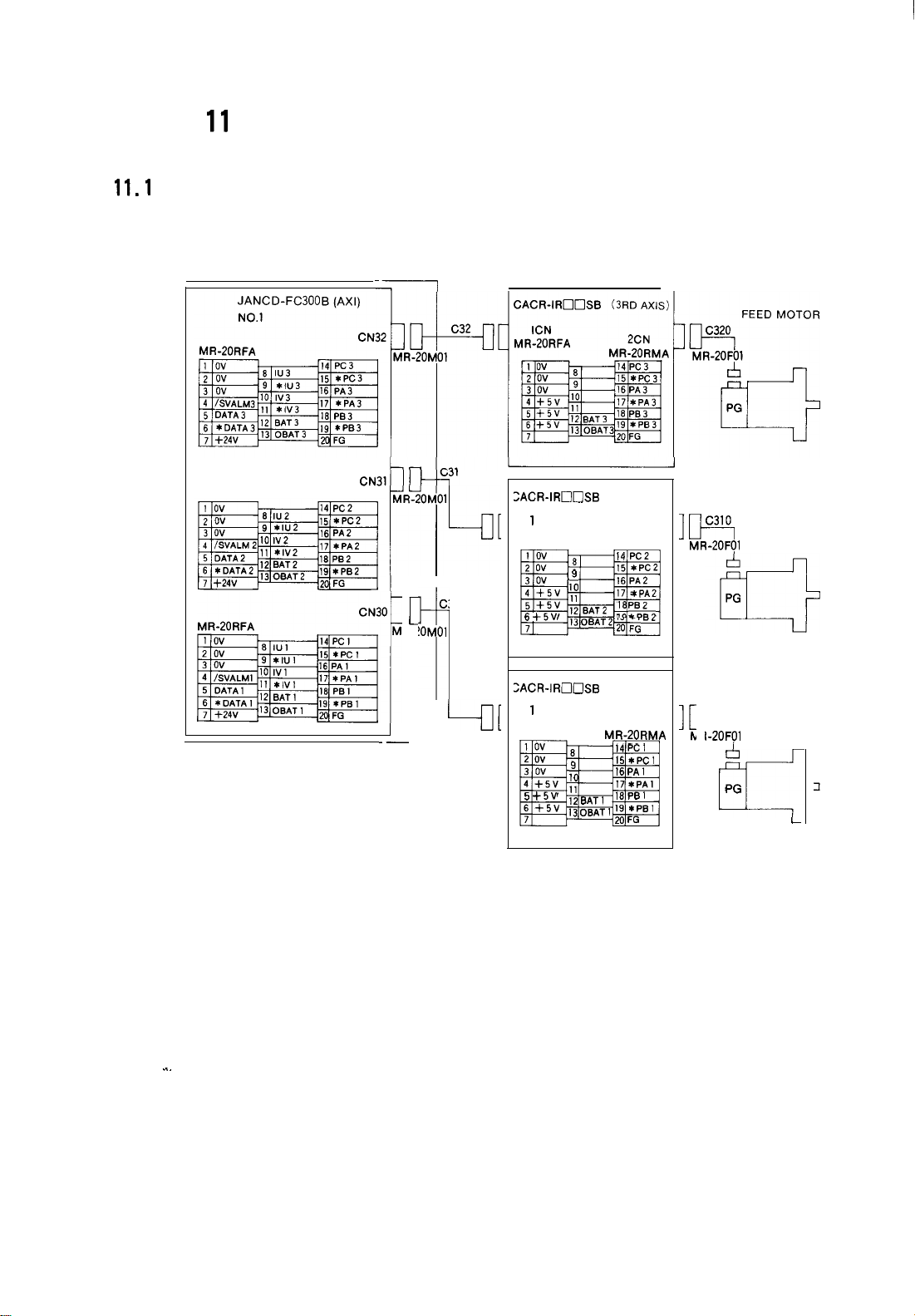
11
CONNECTION TO FEED
11.1
CONNECTION TO EACH UNITS
(1)
Cable
SERVO
UNITS
CPU
MR-20RFA
MR-20RFA
=F
-~
CN30
.—
M
J
C30
!OMO1
1
41[
FEED SERVO UNIT
3ACR-IRUOSB (2ND AXIS
1
CN
MR-20RMA
IOV
8
2 Ov
3 Ov ,:
;j:;
11
12 BAT2 ;:
6
+5V 130
7
=
2ACR-IROOSB (1ST AXIS)
1
CN
MR-20RFA
10V
8
2 Ov
3 Ov
;0
4 ‘5V
11
5
+5V 12
6
+5v
130BAT1 ;;:B1
7
w
MR-20RFA
14
15 *PC2
16 PA2
17 *PAZ
BAT220FG
MR-20RMA
14PC1
15*PC1
16PAI
17 *PA I
18PB1
BAT1
2 CN
PC2
:~z
2CN
IR
MR-20F01
C300
I-20F01
A
PG
c
L
28
Fig. 11. l
Connection to Each Unit
(lst to 3rd Axis)
. .
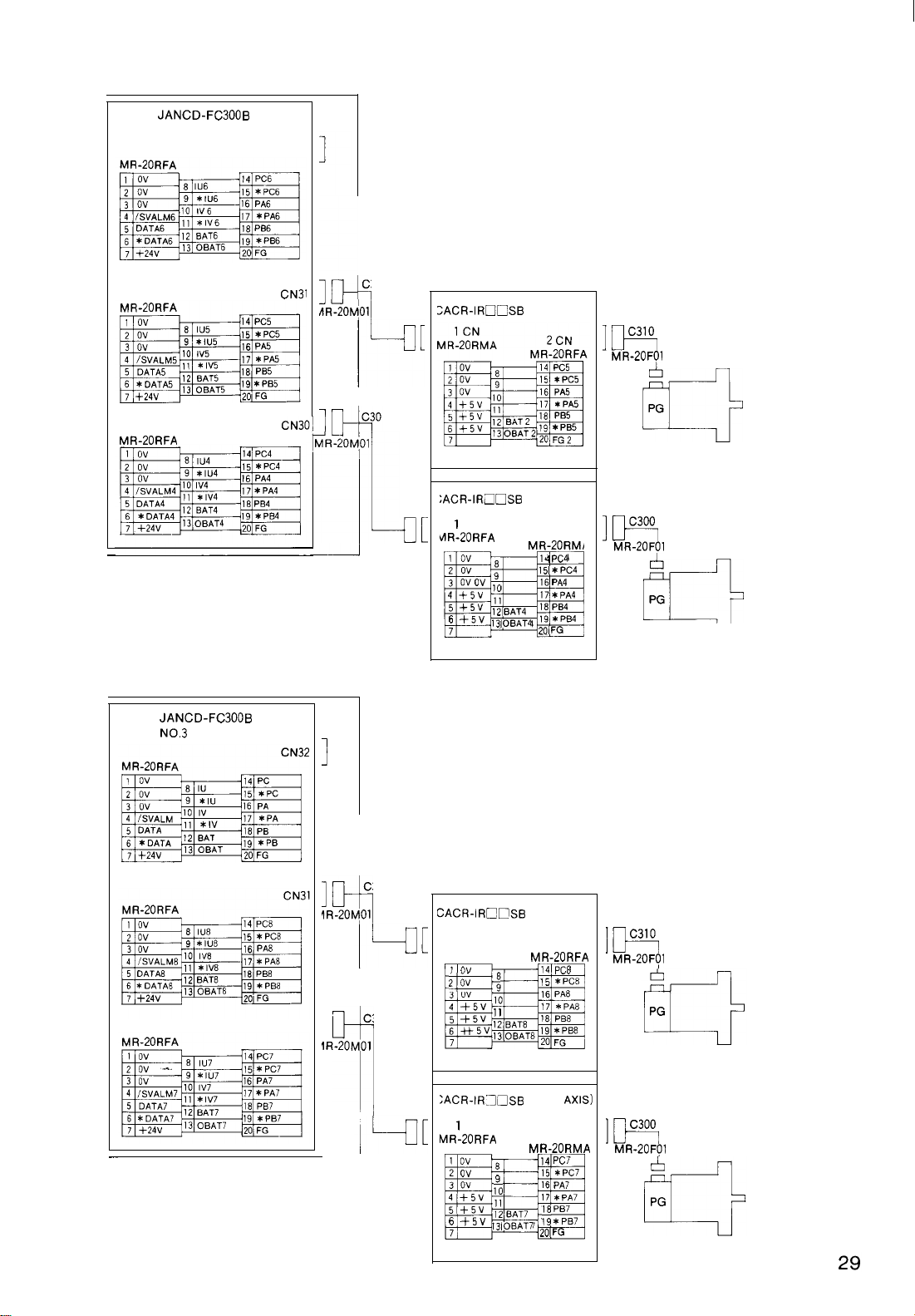
CPU
JANCD-FC300B (AXI)
NO.2
CN32
I
CN31
MR-20RFA
—
Fig. 11.2 Connection to Each
(4th and 5th Axis)
CPU
JANCD-FC300B (AXI)
N0,3
C31
Ju
h
AR-20M011
Unit
1
‘EED SERVO UNIT
;ACR-l
;AcR-IRdnsB
MR-20RFA
U[
=
RO~SB
1
CN
10V
2 Ov
3 Ov
4+5V
5 ‘5V
6
+5V
7
(5TH-AXIS)
(4TH-AXIS
MR-20RMI
8
;0
II
126AT4
130BAT4 20FG
2 CN
I 4
PC4
15*PC4
16
PA4
17*PA4
18 PB4
19 *PB4
IW
MR-20F01
&
PG
G
IR
MR-20F01
A
PG
m
FEED MOTOR
u
1~
$R-20M01
CN3C
1
!R-20M01
7
—
Fig. 11.3 Connection to Each Unit
(7th and 8th Axis)
I
C31
I
C30
CACR-l R~nSB
1 CN
MR-20RMA
1
Ov
20V:
3 Ov ,
0
: ~:; II
6 +5V
;;~B~T8
7
a
:ACR-lRg~SB
1
CN
MR-20RFA
10V
8
2
Ov
3 Ov
:0
;~;; II
12 BAT7 ;;
6
+5V
130BAT7 ~oFG
7
w
(8TH AXIS)
2 CN
MR-20RFA
14
PC8
15
*PC8
16 PA8
17 *PA8
18 PB8
19
*PB8
20 FG
(7TH Axis)
2 CN
MR-20RMA
14 PC7
15 *PC7
16
PA?
17 *PA7
:07
C31O
lb
MR-20F01
C300
lb
MR-20F01
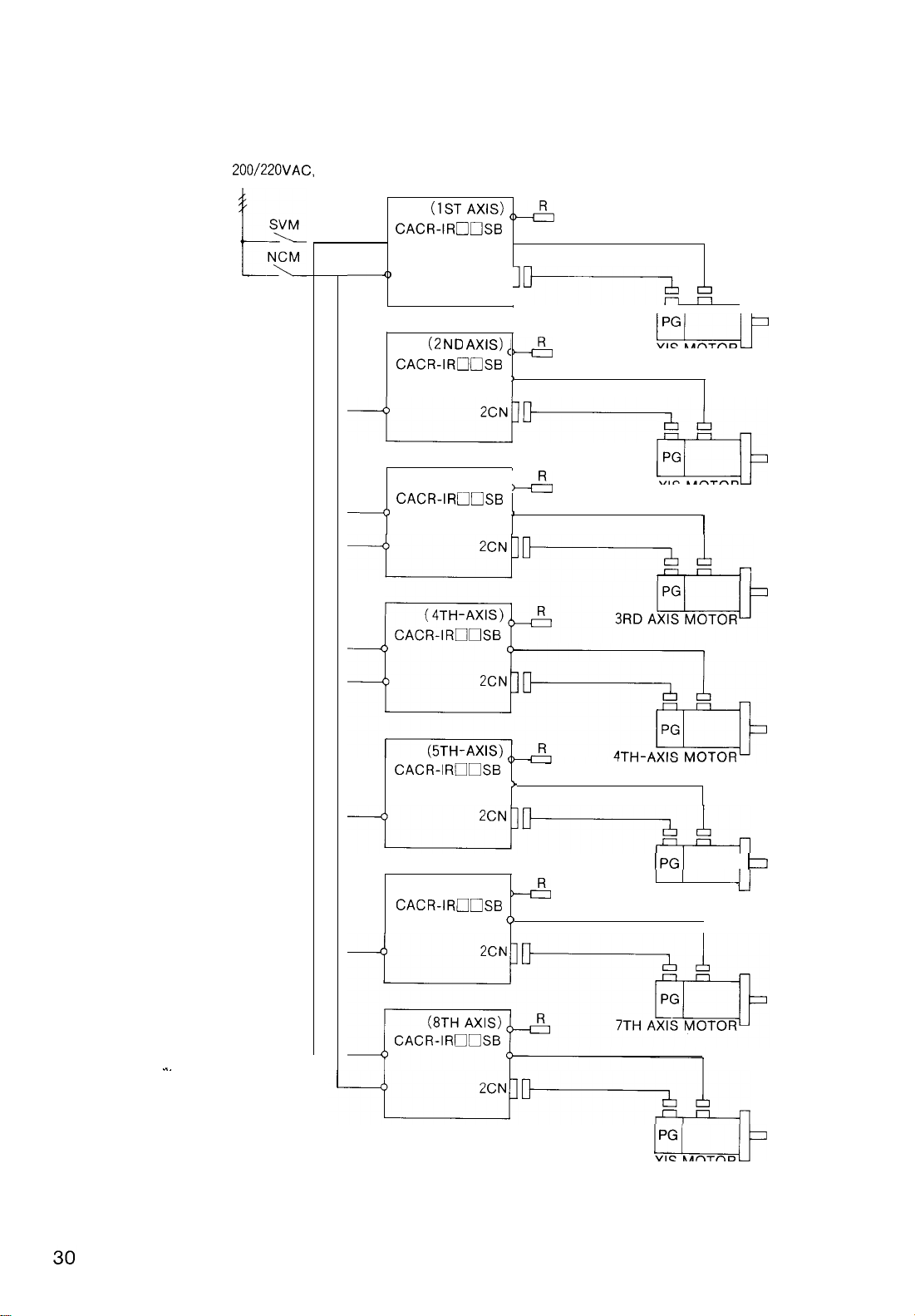
(2) MAIN CIRCUIT
3-PHASE 200/220VAC, 50/60Hz
SVM
NCM
L:
CACR-IRDDSB
~
)
(2 ND AXlS)C
CACR-IRDDSB
c~
(3RD AxIs),
CACR-IRCIDSB
~
)
~“
2CN
)
1~
&
c
)
&
c
1
1ST AXIS MOTOR
2ND AXIS MOTOR
3RD AXIS MOTOR
~
w
&
1
CACR-l R~nSB
d
)
(7TH AXIS),
CACR-IRDDSB
4 )
. .
Fig. 11.4 Main Circuit Connection
(
>
IPGI I b
&
<
)
5TH-AXIS MOTOR
I
u
8TH AXIS MOTOR
 Loading...
Loading...