

Page 1
Allen-Bradley
Open-loop
Velocity
User
Control Module
(Cat. No. 1746-QV)
Manual
Page 2

Important User Information
Because of the variety of uses for the products described in this
publication, those responsible for the application and use of this control
equipment must satisfy themselves that all necessary steps have been
taken to assure that each application and use meets all performance and
safety requirements, including any applicable laws, regulations, codes
and standards.
The illustrations, charts, sample programs and layout examples shown in
this guide are intended solely for purposes of example. Since there are
many variables and requirements associated with any particular
installation, Allen-Bradley does not assume responsibility or liability (to
include intellectual property liability) for actual use based upon the
examples shown in this publication.
Allen-Bradley publication SGI-1.1, Safety Guidelines for the
Application, Installation, and Maintenance of Solid-State Control
(available from your local Allen-Bradley office), describes some
important differences between solid-state equipment and
electromechanical devices that should be taken into consideration when
applying products such as those described in this publication.
Reproduction of the contents of this copyrighted publication, in whole or
in part, without written permission of Allen-Bradley Company, Inc., is
prohibited.
Throughout this manual we use notes to make you aware of safety
considerations:
ATTENTION: Identifies information about practices or
circumstances that can lead to personal injury or death,
!
Attention statements help you to:
property damage or economic loss.
• identify a hazard
• avoid the hazard
• recognize the consequences
Important: Identifies information that is critical for successful
application and understanding of the product.
SLC is a trademark of Allen-Bradley Company, Inc. PKZIP and PKUNZIP are registered trademarks of PKWARE Inc.
Page 3

Manual Changes (Series A/D)
Changes to this revision of the manual include these additions:
• Considerations for Selecting the "15V dc Power Supply (chapter 4)
• Other Design Considerations (chapter 4)
• Testing for Proper System Operation (chapter 5)
• Power Supply Loading Specifications (appendix A)
Publication
1746-6.18 – April 1998
Page 4

Notes:
Summary of Changestoc–ii
Publication
1746-6.18 – April 1998
Page 5

Table of Contents
System Overview
Chapter Objectives
Is the 1746-QV Module?
What
What Is an SLC-500 System?
Why Use This System?
How Does It Work?
What
Are Typical Applications?
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . .
Quick Start
Procedure
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Setting Up the Software
Chapter Objectives
Obtaining
Configuring Your SLC Processor, Off-line
Modify
General
Profile
the Ladder Program Electronically from
BBS or the Internet
About the Rockwell Bulletin Board System (BBS)
To Access BBS:
To Access the Internet:
N Files in Y
Output
Image T
Conventions for Profiles
Operation
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . .
our SLC Processor, Off-line
able with Profile Data
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . .
. . . . . . . . . . . . . .
1–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1–1
1–1
1–1
1–2
1–2
1–2
2–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2–1
3–1. . . . . . . . . . . . . . . . . . . . . . . . . . .
3–1
3–1
3–1
3–1
3–2
3–2
3–4
3–4
3–5
3–5
Setting Up the Hardware
Chapter Objectives
Connect
Connect
Minimizing
Considerations
Other
the LDT to Module Inputs
Module Outputs to Output Devices
Interference from Radiated Electrical Noise
Selection
Application
of the "15V dc Power Supply
Design Considerations
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
for the "15V dc Supply
of the "15V dc Power Supply
. . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
. . . . . . . . .
. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . .
4–1. . . . . . . . . . . . . . . . . . . . . . . . . .
4–1
4–1
4–2
4–2
4–3
4–3
4–4
4–4
Page 6

Table of Contentsii
Operating the Module for the First Time
Chapter Objectives
Power Up the System
Check
Wiring and Grounding
Get Ready to Move the Ram
Move the Ram
Jog
the Ram to the Reference Position
Test
for Proper System Operation
Troubleshoot Possible Problems
Using
Status Bits for Errors Detected by the Module
Troubleshooting
Conditions
That Control Module Outputs
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . .
T
able
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Module Specifications
Electrical
Physical
Environmental
Specifications
Specifications
Specifications
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . .
Ladder Program
. . . . . . . . . .
. . . . . . . . . . . . . . . . . .
5–1. . . . . . . . . . . . . . .
5–1
5–1
5–1
5–2
5–2
5–3
5–4
5–4
5–4
5–5
5–5
A–1. . . . . . . . . . . . . . . . . . . . . . . . . . . .
A–1
A–1
A–1
B–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SLC Processor Files
Input
G
File
Output
Image T
able
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Image T
able
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C–1. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C–1
C–2
C–2
Page 7
Chapter Objectives
What Is the 1746-QV Module?
What Is an SLC-500 System?
This chapter presents a conceptual overview of how you use the
1746-QV module in an application.
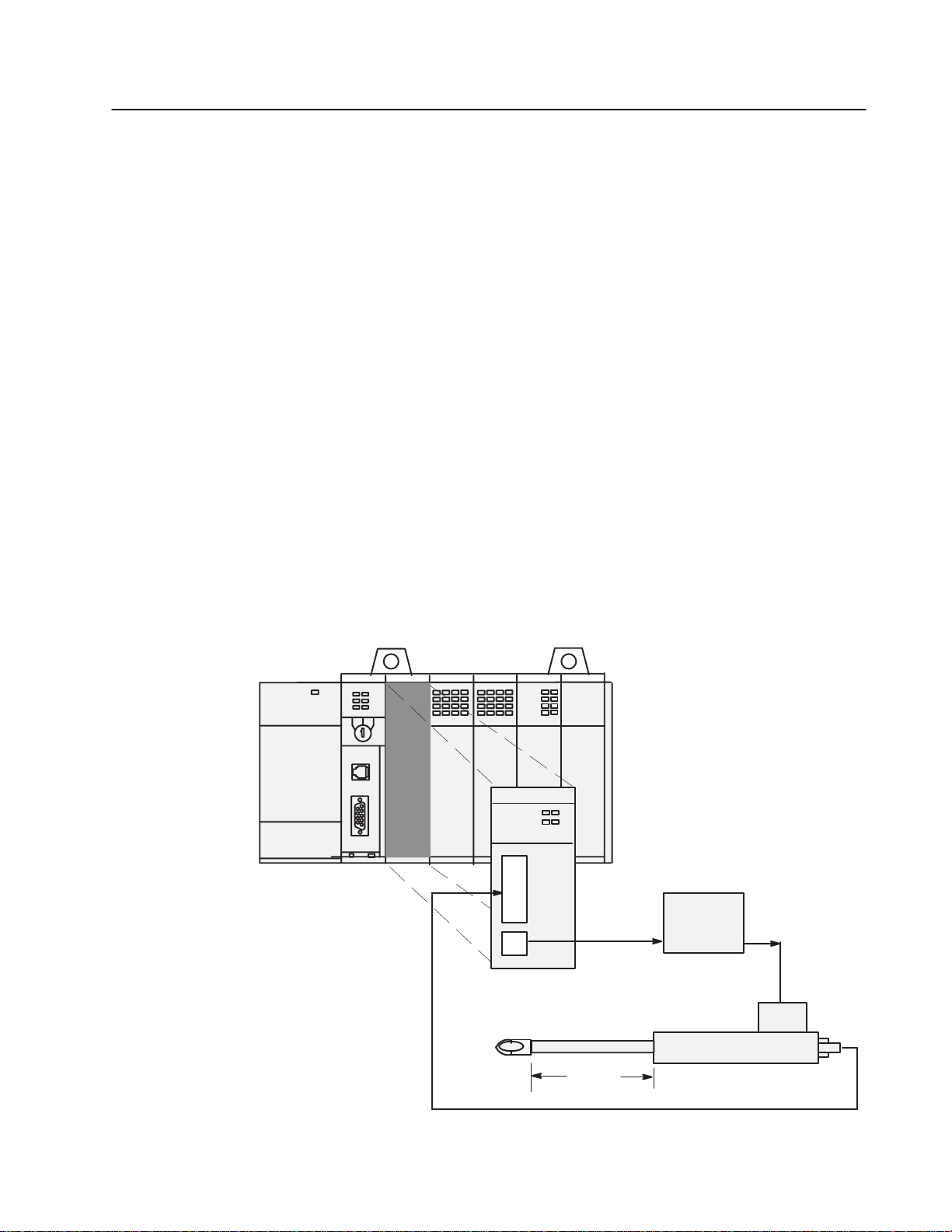
The 1746-QV module is part of an SLC-based open-loop control
system for controlling the speed and placement of an hydraulic ram.
The module accepts an input from a linear displacement transducer
(LDT) and motion profiles that you program into the SLC processor,
and varies its output in the range of "10V dc. The SLC processor
sends to the module a pair of extend and retract profiles that define
when to accelerate or decelerate hydraulic motion.
The Allen-Bradley Small Logic Controller (SLC) system is a
programmable control system with an SLC processor, I/O chassis
containing analog, digital, and/or special-purpose modules, and a
power supply. The 1746-QV module interfaces your hydraulic ram
and position-monitoring device (LDT) to the ladder sequence in your
SLC processor. The system can be illustrated as follows:
Power
Supply
SLC-500
Processor
Position
Input
from LDT
HYDRAULIC
RUN
FAULT
LDT/"10V DC
1746-QV
module
Analog
Output
"10v dc
Piston-type Hydraulic Cylinder and
Linear Displacement Transducer (LDT)
Axis
Motion
Proportional
Amplifier
Publication
Proportional
Valve
1746-6.18 April 1998
Page 8
1–2
Position
Position
Head
Head
System Overview
Why Use This System?
How Does It Work?
Extend Direction
3
Voltage
2
1
4
Segments
Because you can change the speed of the hydraulic ram with extend
and retract profiles and store additional profiles (recipes) in data
table iNteger (N) files, this control system has these benefits:
• reduced cycle time – you can increase ram speed for faster operation
• reduced or eliminated pressure spikes and water-hammering for
smoother operation and less wear and tear on the machine –
you can profile accelerations and decelerations of the hydraulic ram
• energy savings – you can match the speed of the hydraulic pump
to the force that you need
• faster new-part change-over – you can store your setups and
minimize mechanical re-adjustments between parts
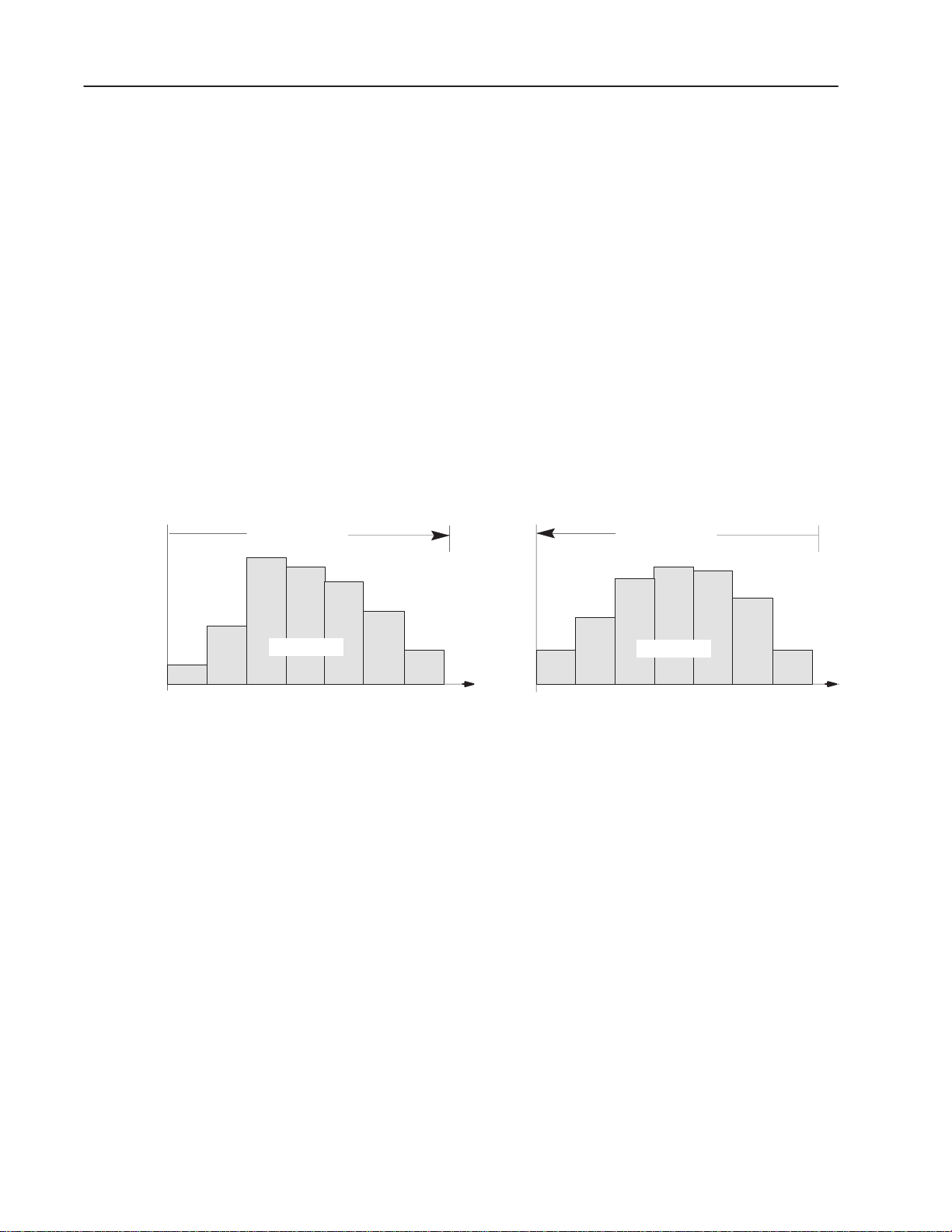
The 1746-QV module executes the extend and retract profiles that you
load to control the motion of the hydraulic ram. You can program up
to seven different voltages over the length of travel in both the extend
and retract directions to control how the ram accelerates or decelerates.
Retract Direction
4
5
6
7
Voltage
1
3
2
Segments
5
6
7
LDT
What Are Typical Applications?
LDT
Each position setpoint triggers a corresponding voltage output in the
range of –10V to +10V dc that translates into speed. The LDT
provides high-speed position updates to the module for consistent and
repeatable motion.
Use the 1746-QV module in an SLC-based system for low-cost
control of:
• hydraulic machinery
• simple (non-CNC) hydraulic presses
• diecasting machinery
• welder placement
• pneumatic actuators for clamping or placement
In addition, the module is designed to support standard proportional
amplifiers and retrofit into most existing hydraulic systems.
Publication
1746-6.18 April 1998
Page 9
Procedure
Use this chapter as an abbreviated procedure for getting the 1746-QV
module into operation or as an overview if you need more information.
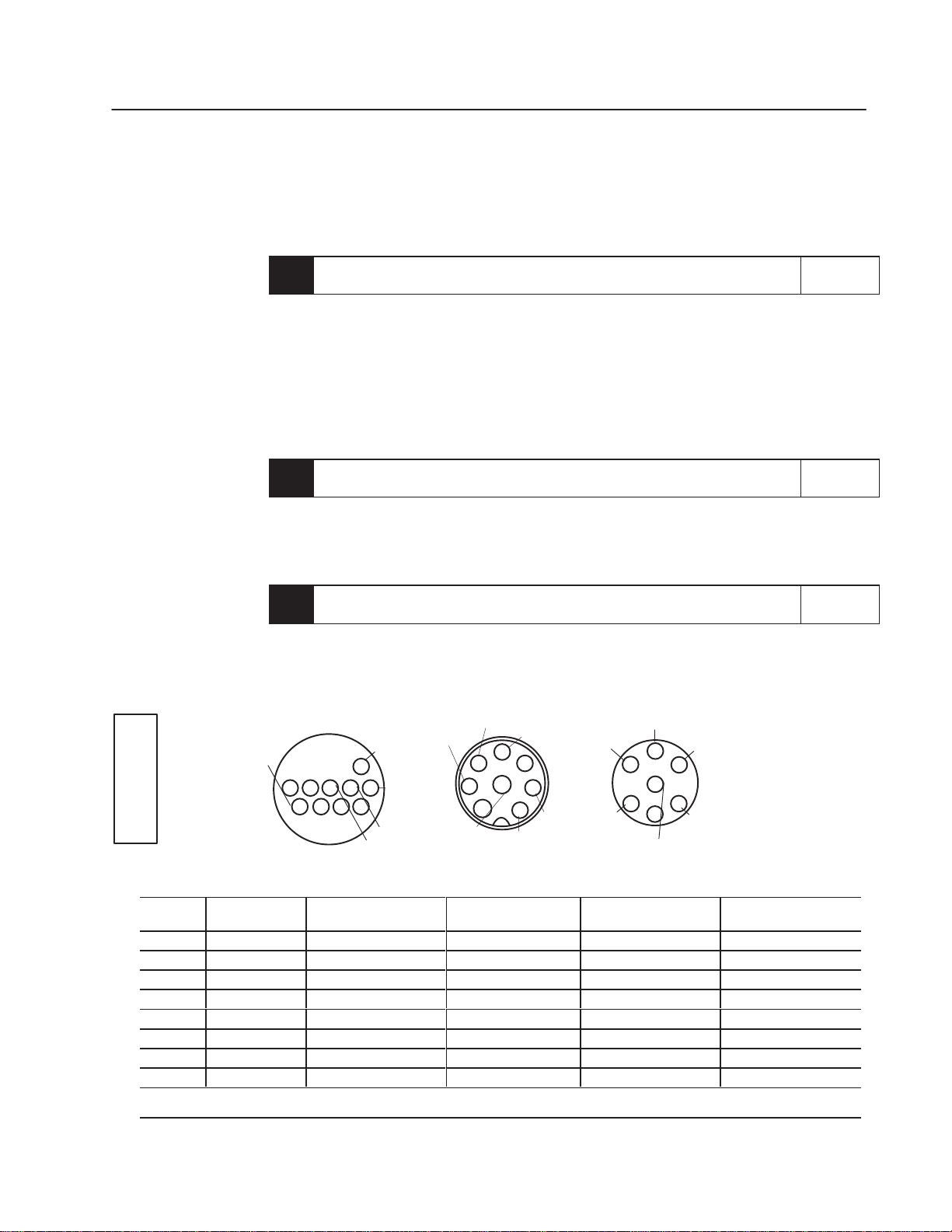
1746-QV Module
Input Terminal Block
(+) Gate Out
8
(–) Gate Out
7
(–) Interrogate
6
(+) Interrogate
5
Shield/Frame
4
–15V dc PS
3
PS Common
2
+15v dc PS
1
1.
Load Ladder Logic into Your Computer Chapter 3
Obtain the ladder program (appendix B) from Rockwell Software Bulletin Board (BBS) or the Internet.
From
BBS:
in the Allen-Bradley Products Library
directory
and decompress it with PKUNZIP available on BBS. The ladder program, VELMOD, is SLC500
code (65 Kbyte).
Download it into a hard drive subdirectory where your programming software looks for files.
.
The
(216) 646-ROCK (-7625). If a new user
, follow prompts to register
manual is in W
ord format. Download it
. Log in. Look for 1746QV
into a hard drive sub-
From Internet: webpage http://www.ab.com If a new user, click Join Now and follow prompts to
register. Log in. Search for QV: on homepage, click Search Our Site, insert QV in window, and click
button. The manual is PDF format and requires Adobe Acrobat viewer
search
. The ladder program is PDF
format and must be entered manually.
2.
Set Up Your Software Chapter 3
Configure the SLC Processor and I/O with your programming software. Enter the following:
a) processor type, b) module I/O-chassis slot, c) module ID (13115), d) G-file size (7 words), and
e) G-file configuration values from the ladder program (appendix B).
Modify N files for the profile found in the ladder program (appendix B) to suite your application.
3.
Connect the LDT to the Module’s Input Terminal Block Chapter 4
The following are connections between the 1746-QV module and typical LDTs such as
Temposonics, Balluff, Santest, and Gemco.
Interrogate
Temposonics II,
RPM or DPM
(+)
(+)
10
(–)
(–)
(–)
"15V
PS
Common
1
Frame
23456789
GND
(+)
Gate
Out
dc PS
The
views are looking at the connector on the LDT head.
Balluff
BTL-2-L2 & -2-M2
Interrogate (–)
3
"15V
dc PS
Gate
7 (+)
Out (–)
Gate
2
45
(–)
8
6
PS
Common
Out (+)
1
Interrogate (+)
Santest
GYRP & GYRG
+15V
dc PS
Gate
Out (+)
NC
1
5
Interrogate
2
4
6
PS
Common
3
(+)
7
(–)
Gate
Out (–)
Gemco Quick-Stick II
951VP
w/PWM
Output
B–BLK PS Common
C–RED +15V dc PS
K–GRY + Interrogate
E–BRN –Sq Wave Out*
F–BLU +Sq Wave Out*
A–WHT –Interrogate
G, D, H RS232RXD
J–PUR 2nd PS COM
*951RS has pulse trigger
1746-QV
Input Pin #
(+) and (–) wires of same function should be a twisted pair within the cable.
Note 1: In the table, we use the term “gate out” for pulse trigger or square wave (Gemco) and start/stop (Balluf
Function Temposonics II
8
(+) Gate Out
7
(–) Gate Out
6
(–) Interrogate
5
(+) Interrogate
4 Shield/Frame n/a
3
–15V dc PS
2 PS
1 +15V dc PS
Common
RPM or DPM
4 – Pink
3 – Gray
10 – Green
9 – Y
6 – Blue
1 – White
5 – Red
ellow
Balluff
BTL-2-L2 & -M2
2 – Gray (note 1)
5 – Green (note 1)
3 – Pink
1 – Yellow
n/a
8 – White
6 – Blue
7 – Brown
Santest
GYRP/GYRG
pin
5
pin
7
pin
6
pin
4
n/a n/a
n/a n/a
pin
3
pin
1
f -M2) LDT signals.
Publication
Gemco
Quick-
Stick 951VP/RS
F – Blue (note 1)
E – Brown (note 1)
A – White
K – Gray
B – Black
C – Red
1746-6.18 April 1998
Page 10
2–2
Quick Start
4.
Important:
output cable to a 0V connection in the amplifier
1746-QV
Terminal Block
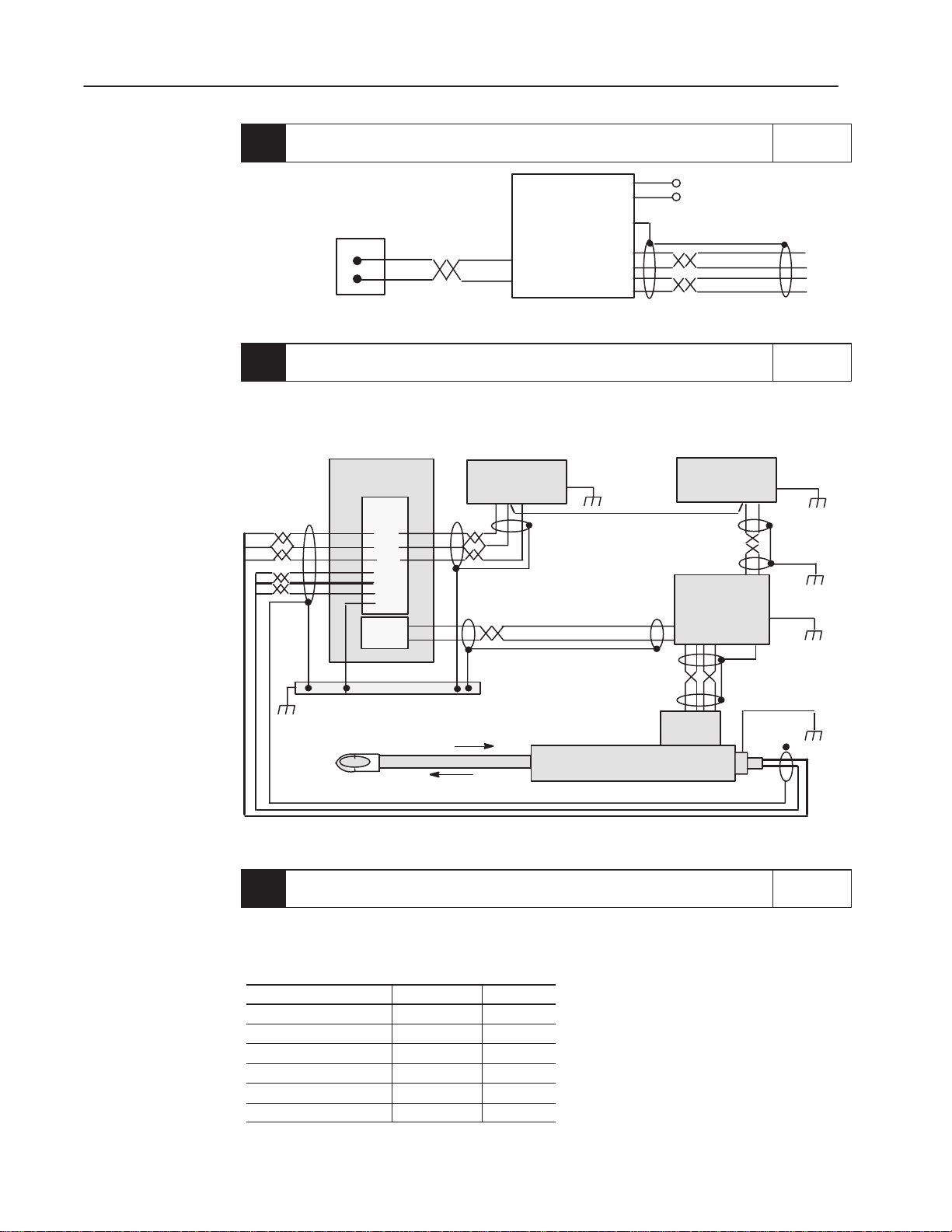
5.
Connect Module Output Terminals to Output Devices With Correct Bonding Chapter 4
Connect the shield of the amplifier
Analog Output
("
Output
2
1
10v dc)
.
Servo Amplifier
(Proportional)
(+)
Dif
f.
Input
(–)
Outputs
to valves
0V
A
B
Minimize Interference from Electrical Noise with Correct Shielding and Grounding Chapter 4
Important: Connect PS output commons togerther.
Connect the following to earth ground: a) cable shields (except for amplifier outputs) at one end only
b) input terminal 4, c) case grounds of PS and amplifier, e) LDT flange.
Case
GND
Important:
connect PS output commons together
and isolate from earth ground.
Belden
8761
For correct bonding,
ransducer (LDT)
LDT
Power
LDT
Signals
1746-QV
Module
Input
1
2
3
5-8
4
2
Output
1
earth ground
"
15V PS
(+) (C) (–)
Belden
8770
Analog Output
Piston-type Hydraulic Cylinder and
Linear Displacement T
+24V dc PS
0V dc PS
Do NOT connect output
shields to earth ground
T
o solenoid A
T
o solenoid B
,
24V PS
(–) (+)
Servo
Proportional
Amplifier
0V
Valves
Case
GND
Belden
8761
Case
GND
Cable
Note
Cable Note: Use cable
recommended by the LDT
and amplifier manufacturer
Publication
1746-6.18 April 1998
LDT
Cable
.
Note
6.
After
loading profiles with the ladder program (step 1), alternately
Operate the Module for the First time Chapter 5
and Hydraulic Ram
run the extend profile (O:e.0/0 = 0-to-1),
then the retract profile (O:e.0/1 = 0-to-1). Modify the profile to reach the preset reference, and set it.
Important:
If motion is reversed: for a "10V dc output, change the sign (") of all extend/retract voltage
values; or for a +10V output, energize the other solenoid on the directional valve (with ladder logic).
To do this:
load all profiles 1 N7:40
set preset reference to zero
clear errors
read current position
run an extend profile
run a retract profile
Enter decimal:
8 N7:50
16 N7:50
read, only
1 N7:50
2 N7:50
at address:
N7:61
Page 11

Setting Up the Software
Chapter Objectives
Obtaining the Ladder Program Electronically from BBS or the Internet
This chapter helps you do the following:
• Obtain the ladder program electronically
• Configure your SLC processor off-line
• Modify N files in your SLC processor, off-line
• General conventions for profiles
• Profile operation
You can obtain ladder logic electronically and download it to your
SLC processor conveniently without the worry of data-entry errors.
About the Rockwell Bulletin Board System (BBS)
You can access the Rockwell Software Bulletin Board System (BBS)
by modem. Anyone is welcome. The BBS provides utilities, examples,
and technical information on Rockwell Software products and on
selected Allen-Bradley products.
• new users may:
– send and receive messages
– download General Access files
– upload files for review by technical support specialists
• verified customers may:
– search for new and existing files
– download files such as utilities, example programs, tech info
– access software bulletins
• subscribers to tech bulletins, DataDisc CD-ROM may:
– download tech bulletins of the Tech Bulletin Subscription series
User accounts are automatically generated online. We use our product
data base to verify BBS accounts at your initial log-in, and we adjust
your security level according to your support status. Should your
registration information change, you can update your account from the
“Configure System Defaults” menu.
To Access BBS:
1. Set your modem to no parity, 8 data bits, and 1 stop bit.
2. Dial (216) 646-ROCK (-7625).
3. Follow prompts to log in. New users must create a new account.
4. Look for 1746QV in the Allen-Bradley Products Library. The manual
is formatted in Microsoft Word and compressed with PKZIP. The
ladder program, VELMOD, is SLC code.
Publication
1746-6.18 April 1998
Page 12

3–2
Setting Up the Software
5. Download ladder program VELMOD (65 Kbyte SLC code) into the
subdirectory on your hard drive where your programming software
looks for files. With RSLogix: C:\ . . . RSLogix 500 English\Project.
6. Download the ladder program to your SLC processor.
7. Download the manual into a hard drive subdirectory. You must
decompress the Word version with PKUNZIP available on BBS.
To Access the Internet:
1. Access the Allen-Bradley webpage at:
2. To access the member area, you must log in. If you do NOT have
an account, click Join Now and follow the prompts to register.
3. Search for QV: on homepage, click Search Our Site, insert QV into
the window, and click Search button. The manual is PDF format and
requires Adobe Acrobat viewer. The ladder program is PDF format
and must be entered manually.
Configuring Your SLC Processor, Off-line
This procedure assumes you are using RSLogix500 Programming Software, version 2.10 or later. For other software, the procedure may vary.
1. Open your 1746-QV project,
VELMOD.
2. Configure the type of SLC processor. To do this:
A. Open the file, Controller Properties.
B. Select the SLC processor type and click OK.
3. Configure the rack size, module slot, and module ID:
A. Open the file, I/O Configuration.
B. Select the rack size.
C. Highlight the slot number for the module.
D. From the list of modules, scroll to 1746-QV and double–click.
If the module is not listed:
– Scroll to Other and double-click.
– Enter the module’s ID (13115) and double-click.
4. Size the “G” file:
A.Highlight 1746-QV (or 13115 if module was not listed).
B. Click [A
dv Config].
Publication
1746-6.18 April 1998
C. In the dialog box, enter a G-file length of 7.
D. Press [E
dit G Data].
Page 13

Setting Up the Software
For e a ple o enter an calibration of 8.9373
Configuration Bit
1 1 0
–16,384
–32,768
1 1 0
–16,384
towards
3–3
5. Enter values in the G file:
If the module was listed: If the module was not listed (you entered the ID):
You get the G–file Setup screen.
Enter data from the table, below.
You get the following display, shown in decimal radix.
Enter a value in each word as shown, next.
G–file display for unlisted module (shown in decimal radix):
Ge:0 2056 0 0 0 0 0 0
Enter a value at each G-file word address and press [ENTER].
Then cursor to the next word address and repeat. For example:
Ge:0 2056 893 730 12 1200 –32768 0
We used values from the ladder logic example (appendix B).
You will want to use G-file values that suit your application:
Word: Function of G-file Word: Range: Description of G-file Word or Bit: Example:
0 Reserved. Do NOT use. n/a The processor stores a code for the 1746-QV module. 2056
words 1 & 2 refer to the gradient or transducer calibration value stamped on the name plate on the transducer housing.
1 LDT calibration: upper 3 digits
2 LDT calibration: lower 3 digits
3 Full-scale length (L) of LDT 2vLv160 inch Enter the length of the LDT (160 inches max). 12
4 Full-scale count (C) 2vCvLx100 Typically C = L x 100.
5 Configuration Bits
15 14 13 12-0 Equivalent V
0 1 0 0
1 0 0 0
0 1 1 0
6 Preset Reference –32,768 to +32,767 Typically zero or home reference value. 32,767 = 327.67 inches. 0
+16,384
–32,768
0
0
+24,576
800-999 ms/inch
000-999 ms/inch
bits 0-12 Set to zero.
alue
bit 13 0 = output maintained during LDT fault while running profiles and
bit 14 Type of LDT: 0 for RPM, 1 for DPM
bit 15 0 = position data increases when moving away from LDT head
For example: To enter an LDT calibration of 8.9373,
use decimal radix and enter 893 in word 1 and 730 in word 2.
Position Data (I:e.1) = C/(L x 100)
LDT Calibration
during SLC mode change
1 = output resets for LDT fault and SLC mode change
1 = position increases when moving toward LDT head
893
730
1200
–32,768
(bit
15 = 1
for position
increases
towards
LDT head)
Examples of Full-scale Count Values
LDT Physical
Length
from 160” to 2” 1 0.01 L (160” to 2”) L x 100
16” 2 0.01 160 8000
16” 4 0.01 160 4000
16” 10 0.001 160 16000
No. of
Recirculations
Resolution
Full-scale
Length (L)
Full-scale
Counts (C)
Important: The module checks for invalid data such as out of
range values or the setting of reserved bits 0-12. You can clear a
data-entry configuration error only by re-entering a corrected value.
6. Save when done
.
Click OK. Click OK. Close window.
Publication
1746-6.18 April 1998
Page 14
3–4
Co and Bit
Enable these bits
/bit #)
with your ladder logic, where e
Setting Up the Software
Modify N Files in Your SLC Processor, Off-line
A set of profile data
for initial configuration
One N file may contain the initial commands, setpoints, and values
for configuring the extend and retract profiles.
Retract Voltages
Retract Positions
Extend V
oltages
Extend Positions
Command
and
Setpoints
>>>
>>>
>>>
>>>
Output
Command
and
Setpoints
Image T
able
>>>
>>>
>>>
>>>
1746-QV
Extend
and Retract
Profiles
Module
The file contains commands and data starting at the these addresses:
• command and position setpoints for extend #N7:0
• command and voltage (velocity) values for extend #N7:10
• command and position setpoints for retract #N7:20
• command and voltage (velocity) values for retract #N7:30
The sample ladder program (appendix B) copies profile data into the
output image table from the above locations.
Output Image Table with Profile Data
Word: Function of Output Image Word: Bit #: Description: (For command bits, a 0-to-1 transition enables the command)
0 Command Bits
(O:e.0
represents the I/O slot number.
1-7 Position Setpoint or Voltage Value n/a Important: Position setpoints are in units of 0.01” (200 = 2.00”)
0 Set to run an extend profile.
1 Set to run a retract profile.
2 Set to disable the profile. This bit over-rides bit 0 or 1.
3 Set to change the current position data to the value of the preset reference
stored in Ge:6.
4 Set to clear any data-entry errors.
5 Set to define words 1-7 as programmed position setpoints for extend.
6 Set to define words 1-7 as programmed voltage values for extend.
7 Set to define words 1-7 as programmed position setpoints for retract.
8 Set to define words 1-7 as programmed voltage values for retract.
9-15 Reserved. Do NOT use.
within the range of –327.68” to +327.67”, and voltage values in
5mV units (3005 = 3.005V) within the range of "10,000mV.
The data monitor mode of your programming software displays the
data files shown below (with values from the ladder program).
Important: Modify these values to suit the preset reference chosen
for the G file and/or to match the LDT length.
Extend Positions: N7:0 32 –45 50 200 300 400 425 500 0 0
Extend V
Retract Positions:
Retract V
Publication
elocities: N7:10 64 3000 3750 4000 4000 4000 4000 4000 0 0
N7:20 128 –45 50 200 300 400 425 500 0 0
elocities: N7:30 256 5000 6000 6000 3000 1000 50 25 0 0
1746-6.18 April 1998
Page 15

Setting Up the Software
3–5
General Conventions for Profiles
Consider the following when you set up your profiles:
• Extend and retract define the profile with respect to the LDT head:
extend is always away from the head, retract is always towards it
• Position data changes direction depending on how you set
configuration bit Ge:0/15 for LDT motion:
0 = position data increases when moving away from LDT head
1 = position data increases when moving towards LDT head
• Each position setpoint triggers from the absolute position data
(I:e.1) as modified by the preset reference.
• Position setpoints are in units of 0.01”.
For example, enter 2” as 200.
• If you enter position setpoints in random order, the module places
them in ascending order (P1 = lowest and P7 = highest) with their
associated voltage value.
• Speed segments are defined increasing from the LDT head,
regardless of position data direction.
• Speeds are reported in the input image table words 2-7 (I:e.2-I:e.7)
for the previous profile (extend speeds reported during the next
retract profile and vice versa)
• Voltage values (for speed) are in the range of "10,000mV in
multiples of 5mV. For example, enter –5.005V as –5005.
Important: Enter voltage values in multiples of 5mV or the module
will fault, causing you to correct and re-download the profile.
Profile Operation
• Voltage values are cleared when you re-program position
setpoints. The profile is cleared when the module loses power or
when you change the value of any G-file configuration word.
Important: Your application may require different position setpoints
and voltage values. Your profiles must be consistent with the physical
parameters of the LDT and G file to guard against damaging hardware.
In general:
• For relatively faster and smoother motion, use two speed segments
for acceleration and five speed segments for deceleration.
• Adjust the ramp rate on the proportional amplifier for the smoothest
operation. Initially, start with the ramp disabled (fastest ramp rate).
• You may compensate for deadband or valve overlap by specifying a
voltage value greater than or equal to the valve’s bias current.
Profile operation depends on how the module reports position data.
With the data-direction bit (Ge:0/15), you select whether:
– position data increasing towards the LDT head (Ge:0/15 = 1)
– position data increasing away from the LDT head (Ge:0/15 = 0)
Publication
1746-6.18 April 1998
Page 16

3–6
Setting Up the Software
For
Position Data Increasing Towards LDT Head (Ge:0/15 = 1)
Voltage
Output = 0
past position 1
Position
Position
Voltage
Output = 0
past position 7
Position
V1
Speed
Segment 6
V2 V3 V4
Speed
Segment 5
Speed
Segment 4
Speed
Segment 3
V5 V6 V7
Speed
Segment 2
Speed
Segment 1
P7P6P5P4P3P2P1
• Starting with the ram between P7 and the LDT head (open position),
running the extend profile results in V7 applied to the output.
As the ram passes below P7, V6 is applied to the output, etc.
• If the ram passes below P1, the output is forced to 0V dc, and the
profile is disabled. You must load new data to operate the profile.
• Placement operations require two segments.
For example, if P2 = 6.07”, V2 = 1.500V, P1 = 0.00” (or a value
less than P2), and V1 = –1.500V, then the module will place the
ram in the vicinity of P2 (between 6.02 and 6.12). The negative
voltage V1 causes motion to reverse or stop. To see this, enter the
example values for P2, V2, P1, and V1 in the previous diagram.
Data Increases from LDT Head (Ge:0/15 = 0)
V7
Speed
Segment 6
V6 V5 V4
Speed
Segment 5
Speed
Segment 4
Speed
Segment 3
P4P5P7
V3 V2 V1
Speed
Segment 2
Speed
Segment 1
P1P2P3P6
LDT
head
LDT
head
• Starting with the ram between P1 and the LDT head (open position),
running the extend profile results in V1 applied to the output.
As the ram passes P1 towards P2, V2 is applied to the output, etc.
• If the ram passes P7, the output is forced to 0V dc, and the extend
profile is disabled. You must load new data to operate the profile.
Publication
1746-6.18 April 1998
Page 17

Setting Up the Hardware
Chapter Objectives
Connect the LDT to Module Inputs
1746-QV Module
Input Terminal Block
(+) Gate Out
8
(–) Gate Out
7
(–) Interrogate
6
(+) Interrogate
5
Shield/Frame
4
–15V dc PS
3
PS Common
2
+15v dc PS
1
Interrogate
Temposonics II,
RPM or DPM
(+)
(–)
(+)
10
(–)
(–)
This chapter helps you install the hardware with these tasks:
• connect the LDT to module input terminals
• connect module output terminals to output devices
• minimize interference from radiated electrical noise
• considerations for the "15V dc power supply
• other design considerations
We assume that you will use one of the following types of LDT:
• Temposonics II: RPM TTSRxxxxxxR, or
DPM TTSRxxxxxxDExxx
• Balluff: BTL-2-L2, or BTL-2-M2
• Santest: GYRP, or GYRG
• Gemco Quick-Stick II: 951VP, or 951 RS
We illustrate typical connections between the 1746-QV module and
these types of LDTs. (There are other suppliers with compatible LDTs.)
Balluff
BTL-2-L2 & -2-M2
Gate
Out (–)
Gate
Out (+)
2
45
(–)
8
3
7 (+)
6
PS
Common
1
Interrogate (+)
+15V
dc PS
Gate
Out (+)
Frame
GND
Out
Interrogate (–)
"15V
dc PS
"15V
PS
Common
1
23456789
(+)
Gate
dc PS
The views are looking at the connector on the LDT head.
Santest
GYRP & GYRG
NC
PS
Common
2
1
5
Interrogate
3
(+)
4
7
(–)
6
Gate
Out (–)
Gemco Quick-Stick II
951VP
w/PWM
Output
B–BLK PS Common
C–RED +15V dc PS
K–GRY + Interrogate
E–BRN –Sq Wave Out*
F–BLU +Sq Wave Out*
A–WHT –Interrogate
G, D, H RS232RXD
J–PUR 2nd PS COM
*951RS has pulse trigger
Connect each 1746-QV input pin # to the corresponding LDT pin #.
1746-QV
Input Pin #
(+) and (–) wires of the same function should be a twisted pair within the cable.
Note 1: In the table, we use the term “gate out” for pulse trigger or square wave (Gemco) and start/stop (Balluff -M2) LDT signals.
Function Temposonics II
RPM or DPM
Balluff
BTL-2-L2 & -M2
Santest
GYRP/GYRG
Gemco QuickStick 951VP/RS
8 (+) Gate Out 4 – Pink 2 – Gray (note 1) pin 5 F – Blue (note 1)
7 (–) Gate Out 3 – Gray 5 – Green (note 1) pin 7 E – Brown (note 1)
6 (–) Interrogate 10 – Green 3 – Pink pin 6 A – White
5 (+) Interrogate 9 – Yellow 1 – Yellow pin 4 K – Gray
4 Shield/Frame n/a n/a n/a n/a
3 –15V dc PS 6 – Blue 8 – White n/a n/a
2 PS Common 1 – White 6 – Blue pin 3 B – Black
1 +15V dc PS 5 – Red 7 – Brown pin 1 C – Red
Publication
1746-6.18 April 1998
Page 18

4–2
Setting Up the Hardware
Connect Module Outputs to Output Devices
1746-QV
Output
Terminal Block
Module outputs connect to a separate 2-conductor output terminal
block located beneath the input terminal block.
+24V dc PS
0V dc PS
Analog Output
("
2
1
10v dc)
Servo Amplifier
(Proportional)
(+)
Dif
f.
Input
(–)
Outputs
to valves
Important:
output cable to a 0V connection in the amplifier
Do not connect the shield to earth ground.
0V
A
B
Ground the shield of the amplifier
T
o solenoid A
T
o solenoid B
.
Note: Follow manufacturer recommendations for shielding the output
cables of the proportional amplifier. Typically, pulse-width modulated
outputs radiate electrical noise originating from the +24V dc power
supply, so isolate the shields of the amplifier output cable to a 0V dc
connection inside the proportional amplifier.
You have a choice of three configurations to match your hydraulics:
• proportional amplifier with ramp and proportional valve
• servo amplifier with ramp and variable-volume pump
• Allen-Bradley 1305 Drive and hydraulic pump
Minimizing Interference from Radiated Electrical Noise
You may use either of the following output voltage ranges:
• 0-10V dc for the Allen-Bradley 1305 Drive or variable-volume pump
• –10 to +10V dc for the proportional amplifier and proportional valve
Important: Signals in this type of control system are very susceptible
to radiated electrical noise. The module is designed to set the loss-ofsensor bit I:e.0/8 and the LDT-error bit I:e.0/0 when it detects position
values that are lost or corrupted by electrical noise.
Connect module output terminals to output devices with correct bonding:
• connect power supply output commons together
• electrically isolate power supply output commons from earth ground
• use bond wires that are equal in size to signal wires
Minimize interference from radiated electrical noise with correct
shielding and grounding:
• connect all of the following to earth ground:
– LDT flange, frame, and machine
– I/O chassis
– protective ground
– AC ground
– cable shields at one end only, preferably with 3/8” braid wire
(for analog output, "15V dc PS, 24V dc PS, and LDT)
– terminal 4 of the input terminal block
Publication
1746-6.18 April 1998
Page 19
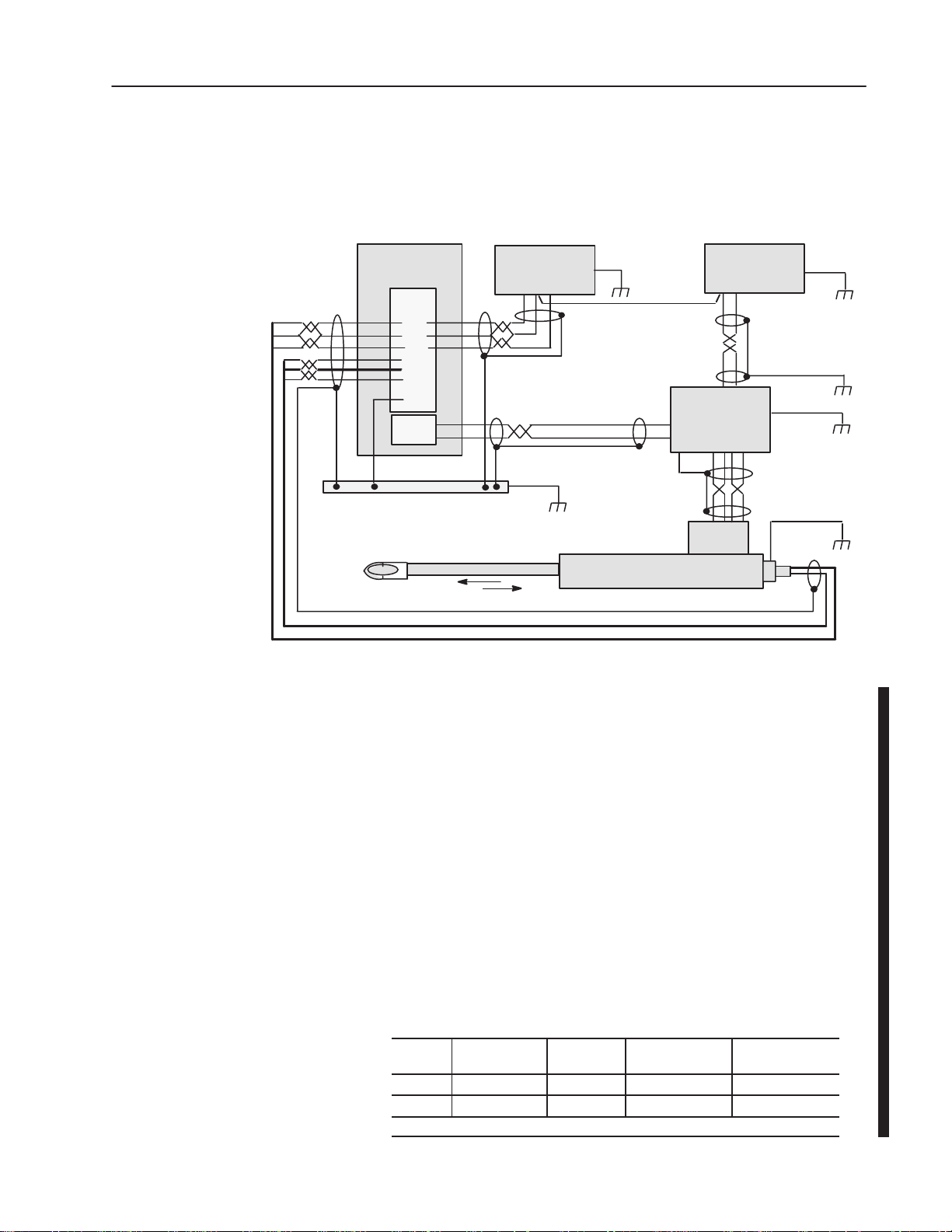
Setting Up the Hardware
• run shielded cables only in low-voltage conduit
• place the SLC-500 processor, power supply, and I/O chassis
assembly in a suitable enclosure
Typical grounding and shielding for this type of control system:
4–3
LDT
Power
LDT
Signals
Cable Note: Use cable
recommended by the LDT
and amplifier manufacturer
.
Considerations for the
"15V dc Supply
Cable
Note
1746-QV
Module
Input
1
2
3
5-8
4
Output
earth ground
"
15V Power
Supply
(+) (C) (–)
Analog Output
Piston-type Hydraulic Cylinder and
Linear Displacement T
Case
GND
Belden
8770
Belden
8761
ransducer (LDT)
LDT
Belden
8761
Servo
Proportional
Amplifier
0V
and Hydraulic Ram
24V Power
Supply
(–) (+)
Cable
Note
Valves
Case
GND
Case
GND
Selection of the "15V Power Supply
The positive and negative supply of some "15V dc power supplies
decay at different rates when ac power is removed. The module’s
output will be biased, based upon the difference in voltage level
between the positive and negative supply. The duration is dependent
upon the magnitude of the difference and the decay rate. For these
reasons, the "15V dc power supply should have or be equipped with:
• proper interlocks with machine operation and e-stop circuits
• an internal voltage-sense relay that drops the "15V (without
variation in decay rates) upon loss of ac power
• auxiliary relay to indicate proper operation and voltage
(such as loss of +15V but not –15 V dc)
Power
Supply Loading
The module and LDT load the power supply typically as follows:
Supply No Transducer
No Load
+15V dc 86mA 128mA 141mA 128mA
–15V dc 14mA 30mA 30mA 40mA
*MTS Temposonics II, model T1SR0U0120R (Other LDTs will have different loading.)
Transducer
Only *
LDT + Module:
+10V dc @ 10mA
Publication
LDT + Module:
–10V dc @ 10mA
1746-6.18 April 1998
Page 20

4–4
Setting Up the Hardware
Application of the "15V Power Supply
The module uses the "15V dc power supply to drive the "10V dc
valve output and to power the LDT. The module detects loss of
"15V dc with its internal LDT diagnostic. The diagnostic
concludes loss of "15V when it detects loss of LDT magnet.
Partial failure of the "15V dc power supply may cause limited
machine operation when the LDT continues to operate properly. Some
LDTs will operate with its supply voltage down to 12V. If you monitor
the "15V dc with SLC diagnostics, you can enable a blocking valve
to lock the actuator in its last position upon detection of:
• e-stop
• power loss
• low voltage condition of the "15V dc supply
ATTENTION: If you provide a system e-stop circuit and design the
system to manage power to the SLC chassis and "15V dc supply, in
all cases DO NOT connect the e-stop to ac power for power supplies.
Other Design Considerations
ATTENTION: We recommend using reasonable methods to assure
that unintended motion does not cause machine damage or create a
safety issue with personnel who will operate the machine.
(Chapter 5 covers testing for proper system operation.)
• Use a proportional valve that does not respond to voltage spikes
created by power supply operation.
• Shut down the hydraulic system upon loss of ac power and
automatically vent pressurized fluid back to the tank.
• Provide ladder programming that interlocks the operation of the
power supply with permissives to run the hydraulic pump.
• Connect a high-speed relay between the module and the valve
amplifier to drop-out the valve signal upon loss of ac power.
Publication
1746-6.18 April 1998
Page 21

Operating the Module
for the First Time
Chapter Objectives
Power Up the System
This chapter outlines the steps for operating the module for the first
time with an operating hydraulic ram. We cover these steps:
• power-up the system
• test for proper system operation
• troubleshoot possible problems
Starting with module and LDT power turned off, bring the system
on-line for the first time as follows (refer to I/O wiring in chapter 4):
Check Wiring and Grounding
1. Disconnect the LDT connector at the head end.
2. Disconnect both of the module’s input and output terminal blocks.
3. Turn ON the power supplies for the LDT and SLC processor, and
check the LDT connector and module input terminal block for:
• pin 1 +15V dc
• pin 2 PS common
• pin 3 –15V dc
4. Observe that the module’s fault LED (red) is ON.
5. Verify NO continuity between pin 2 (PS commons) and pin 4
(shield/frame) on the module’s input terminal block.
6. Verify NO continuity between the LDT cable shield and pin 2
(PS commons) on the module’s input terminal block.
7. Verify continuity between pin 2 (PS commons) on the module’s
input terminal block and the output common on the "15V dc PS
that powers the LDT and module.
8. Verify continuity between pin 2 (PS commons) on the module’s
input terminal block and the (–) terminal on the +24V dc PS
that powers the proportional amplifier.
9. Verify NO continuity between the +24V dc PS (–) connection
and earth ground.
10.Verify continuity between the shield of the amplifier output cable
and pin 2 (PS commons) on the module’s input terminal block.
11. Verify continuity between the cable shield (Belden 8761 or
equivalent) on the +24V dc PS and earth ground.
Publication
1746-6.18 April 1998
Page 22

5–2
N
FA
Operating the Module
Get Ready to Move the Ram
1. Turn on the +24V dc PS that powers the amplifier.
2. Turn on the hydraulic pump and “null” the ram for no movement.
3. Turn off all power supplies.
4. Connect the LDT cable and input terminal block.
5. Turn on all power supplies.
6. Be sure that you have loaded the extend and retract profiles into
the module.
7. Observe module LEDs. The RUN LED (green) should be blinking.
If not blinking, refer to troubleshooting covered last in this chapter.
Module LEDs indicate the following to assist you with the procedures:
This LED: Is: When the Module detects:
RUN
(green)
FAULT
(red)
For Series A Revision A: During startup, Run LED ON and Fault LED
flashing indicate outputs are at 0V dc. During profiles, Fault LED is OFF.
Flashing output is at 0V dc
ON
OFF no internal faults
Flashing
ON an internal fault
profiles are loaded and output is active
an LDT fault
8. Observe that the output image table word 0 (O:e.0) is zero.
If not zero, toggle the value of N7:50 from 0 to 16 to 0.
Reload the profiles by entering the value of 1 into N7:40.
If profiles do not reload, refer to Troubleshooting on page 5-4.
9. With the output terminal block still disconnected, run the extend
profile by changing the value in N7:50 to 1. The RUN LED should
change to ON. If not, refer to troubleshooting covered last.
Important: Reset the value in N7:50 to 0.
10.Connect the output terminal block.
Move the Ram
Important: When you set an output bit with your programming
terminal, the commanded action takes place immediately.
1. Run the extend profile by momentarily changing the value in
N7:50 to 1, and observe the direction of ram movement in N7:61.
If the ram moves in the wrong direction:
If using this type of valve and signal: Then reverse the:
proportional valve with "10V input sign (") of all voltage values and load them into the module
hydraulic motor or ac drive with 0-10V input other solenoid on the directional valve (with ladder logic)
Publication
1746-6.18 April 1998
Page 23

Operating the Module
2. After reversing the sign of voltages (if needed), run the extend
profile again by changing the value in N7:50 to 1.
Observe that the direction of ram travel is correct.
Important: Reset the value in N7:50 to 0.
3. Check the position value reported in the status word, N7:61, as
you run the ram to the end of its travel. If the position data is
reversed, you may need to change the data-direction bit (Ge:5/15)
in the G file off-line as follows:
• 0 = position increases while moving away from LDT head
• 1 = position increases while moving toward LDT head
Important: You must reload profiles for either of these conditions:
• Changing a value in the G file. (This clears the profiles).
• When position data exceeds the position setpoint that is
farthest from the LDT head, the profile is disabled and
you must modify position setpoints and reload the profiles.
4. Verify operation of the retract profile by changing the value in
N7:50 to 2. Important: Reset the value in N7:50 to 0, afterwards.
5–3
Jog the Ram to the Reference Position
The reference position may require that you jog the ram beyond a
position defined by the profile in the ladder program (appendix B).
You may jog the ram as follows:
1. Observe the current position data (in I:e.1).
2. Modify profile position setpoint(s) to permit the ram to travel to the
required reference position using the current position. For example:
If position data reads –100, change P1 to –1300 (length of the LDT)
3. Important: Reset the value in N7:50 to 0.
Load the profiles into the module.
4. Run the extend profile by changing the value in N7:50 to 1, and
jog the ram to the reference position.
5. At the reference position, the position data, I:e.1, (N7:61) will be an
arbitrary value. Set the position data to the value of the preset
reference by changing the value in N7:50 to 8 (N7:40 must = 0).
Position data will change to preset reference (0 in this example).
6. Verify that N7:61 now reads zero at the reference position.
Important: Once you establish the reference position:
• the module will maintain the preset reference’s position data in I:e.1
• all profile position setpoints will be referenced to it
(until you clear Ge:6 by changing any G-file value or set another
reference position. The preset reference is retained during power up.
Publication
1746-6.18 April 1998
Page 24

5–4
Operating the Module
Test for Proper System Operation
Troubleshoot Possible Problems
ATTENTION: Test for proper system operation to verify that
precautions to guard against unexpected motion perform as intended.
(See Power Supply and Design Considerations in chapter 4)
Because of the wide variety of applications for this module, we leave
the procedural details to you.
Look for proper system operation as you test for these conditions:
• controlled system startup/shutdown when turning hydraulics on/off
• startup/shutdown of ac to power supplies
("15V dc, SLC chassis, and 24V dc)
• loss of LDT input
• effect of the last-state-of-output bit (G-file, word 5, bit 13)
regarding one or more of the above
Using Status Bits for Errors Detected by the Module
The module is designed to detect and indicate status as follows
(in the input image table word I:e.0 or N7:60 in the ladder program):
• hardware operational faults
• data entry errors when entering setpoints or setting control bits
• acknowledgement of stored setpoints
Important: To clear error bits, toggle N7:50 from 0 to 16 to 0.
Bit #: Description: (for error & fault bits 0-8, status of 0 = OK, status of 1 = fault.)
0 The module sets this LDT error bit when it detects a:
– broken or mis-wired LDT cable
– faulty LDT
– incompatible LDT type (DPM or RPM)
– missing LDT magnet
– loss of "15V dc PS
1 Module fault, such as EEPROM error. May turn outputs OFF (fault dependent)
2 The module sets this bit when it detects any of the following invalid command bits
or bit combinations in output image table word 0 (O:e.0):
– one or more of the reserved bits 9-15 were set
– bit 5 or 7 (position) was set concurrently with bit 6 or 8 (voltage)
– output enable bit 0 (extend) or 1 (retract) was set before loading valid profiles
– both output enable bits 0 (extend) and 1 (retract) were set concurrently
– started to run a profile after the module had flagged an LDT error (I:e.0/0)
3 You set one or more of the reserved bits 0-13 in G-file word 5 (Ge:5).
4 You entered an invalid length (word 3) or count (word 4) in the G file.
5 You entered an invalid LDT calibration (words 1 and/or 2) in the G file.
6 You entered position setpoint outside the range –32,768 to +32,767 in O:e.1-O:e.7.
7 You entered a voltage value outside the range of "10,000mV in O:e.1-O:e.7.
8 Loss of sensor. The module detected position data (in I:e.1) greater than the LDT
length plus the preset reference. Clear this bit by running a profile.
9-11 Reserved. Do NOT use.
Publication
1746-6.18 April 1998
Page 25

Operating the Module
ha wrong ign .
Module reect pre- et reference when
Profile will not load into the odule.
Bit #: Description: (for error & fault bits 0-8, status of 0 = OK, status of 1 = fault.)
12 The module sets this bit after it stores retract position setpoints or voltage values,
or when retract profile is active. It remains set until another operation is performed.
13 The module sets this bit after it stores your position setpoints.
It resets it after you reset the “program position” bit (O:e.0/5 or O:e.0/7)
14 The module sets this bit after it stores your voltage values.
It resets it after you reset the “program voltage” bit (O:e.0/6 or O:e.0/8)
15 The module sets this bit when it detects the profile is active (output is applied).
Troubleshooting Table
If you observe this condition: Try this solution: Refer to this part of the manual:
5–5
Sensor signal (N7:61)
has wrong sign ().
After download, sensor values do not
match values in N7:61 before download.
Module rejects pre-set reference when
N7:50 is toggled from 0 to 8 to 0.
Profiles will not load into the module.
Unable to initiate extend/retract profiles. Write ladder rung for extend profile, another for retract.
1. Change direction bit (Ge:5/15) and re–download. a) Enter values in G file, page 3-3.
2. Calibrate the sensor at opposite end of cylinder. Re-do Jog Ram to Reference, pg 5-3.
After axis calibration (preset ref = set, and N7:50 = 8),
you must upload and save SLC data files in the PC.
1. Pre-set Ref in G file must be within profile range. Enter values in G file, page 3-3.
2. N7:40 must = 0 when setting N7:50 = 8.
1. Each profile setpoint must be within sensor’s range. Verify full-scale count in Ge:4, page 3-3.
2. Clear any errors by toggling N7:50 (0 to 16 to 0) Prior to step 8 in Get Ready to Move Ram.
3. N7:40 must = 0 when setting pre-set reference
with N7:50 = 8.
Each must include appropriate permissives to enable
a MOV instruction with Source (1 = extend, 2 = retract)
and Destination = N7:50.
Conditions That Control Module Outputs
The module is designed to control its outputs as follows:
The module is designed to: When these conditions are satisfied:
apply profile voltages
to the output
retain its outputs
in last state
turn OFF its outputs any of the following:
all of the following:
– valid extend and retract profiles are stored in the module
– the “stop profile” bit (O:e.0/2) is reset.
– a “run profile” bit (O:e.0/0 or O:e.0/1) is set
any of the following:
– loss of backplane power ("15V dc PS remains applied)
– loss of sensor (LDT)
– SLC mode change or LDT fault (G:e:0/13 = 0)
– LDT position exceeded the setpoint farthest from LDT head
– loss of "15V dc PS
– the “disable output” bit (O:e.0/2) is set
– SLC mode change or LDT fault (G:e:0/13 = 1)
b) Move the Ram, step 3, page 5-3.
none
Re-do Jog Ram to Reference, pg 5-3.
Jog Ram to Reference, step 5, pg 5-3.
none
Publication
1746-6.18 April 1998
Page 26

5–6
Notes:
Operating the Module
Publication
1746-6.18 April 1998
Page 27

Electrical Specifications
Module Specifications
This appendix lists the specifications for the
1746-QV Open-loop Velocity Control Module.
215 mA at 5V dc (from backplane)
Power Requirements
I/O Chassis Location Any I/O-chassis slot except slot 0
Isolation
LDT Inputs
Compatible LDT Input Devices
Module Range
and Resolution
Analog Output
Accuracy of Voltage Output Within "1% of its programmed value
Module Update Time 2 ms
400 mA at +15V dc and 295 mA at –15V dc
(from independent PS, typical but LDT dependent)
1500V ac optical isolation
between LDT input and backplane
"Interrogate
"Gate
"15V dc PS
PS Common
Shield/Frame
Linear Displacement Transducer such as:
Balluff BTL-2-L2 or -M2
Gemco Quick-Stick II
Santest GYRP or GYRG
Temposonics II with DPM or RPM
160 inches
"0.01 inch
0-10V dc @ 250 mA or
–10 to +10V dc @ 250 mA
Physical Specifications
Environmental Specifications
Run ON Profile running, Output active
(green): Flashing Output at 0V dc
LED Indicators
Module ID Code 13115
Maximum Wire Size Two 18 AWG wires per terminal on terminal block
Operating Temperature
Storage Temperature
Relative Humidity 5% to 95% (without condensation)
Agency Certification
(when marked on
product or package)
Fault OFF Module OK
(red): Flashing LDT fault
ON Module fault
0°C to 60°C (32°F to 140°F)
–40°C to +85°C (–40°F to +185°F)
CE marked for all applicable directives
Publication
1746-6.18 April 1998
Page 28

Notes:
Module SpecificationsA–2
Publication
1746-6.18 April 1998
Page 29

The following data define extend and retract profiles for the
sample program:
Extend position setpoints #N7:0
Extend voltage values #N7:10
Retract position setpoints #N7:20
Retract voltage values #N7:30
This ladder program loads profiles into the module through the output
image table. (The 1746-QV module is in slot 1 for this example.)
Rung 2.0 Program Profile |
| S:1 N7:40 |
|–––] [––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––(L)–––––––+
| 15 0 |
|
Rung 2:1 |
| Set to |Extend |Positions |Voltages |
| program |profile |stored |stored |
| profile |complete Extend Position Setpts. |
| |
| N7:40 N7:8 I:1.0 I:1.0 +COP–––––––––––––––+ |
|–––] [–––––––––]/[–––––––]/[––––––––]/[––––––––––––––––––+COPY FILE +–|
| 0 0 13 14 |Source #N7:0| |
| |Dest #O:1.0| |
| |Length 8| |
| +––––––––––––––––––+ |
Rung 2:2
| Set to |Extend |Positions |Voltages |
| program |profile |stored |stored |
| profile |complete Extend Velocity Setpts. |
| |
| N7:40 N7:8 I:1.0 I:1.0 +COP–––––––––––––––+ |
|–––] [–––––––––]/[–––––––] [––––––––]/[––––––––––––––––––+COPY FILE +–|
| 0 0 13 14 |Source #N7:10| |
| |Dest #O:1.0| |
| |Length 8| |
| +––––––––––––––––––+ |
Rung 2:3
| Set to |Extend |Run/store |Positions |Voltages Extend |
| program |profile |retract |stored |stored profile |
| profile |complete complete |
| |
| N7:40 N7:8 I:1.0 I:1.0 I:1.0 N7:8 |
|–––] [–––––––––]/[–––––––]/[––––––––]/[––––––] [––––––––––––––––+––––(L)––––+–|
| 0 0 12 13 14 | 0 | |
| | Program | |
| | extend | |
| | voltages | |
| | O:1.0 | |
| +––––(U)––––+ |
| 6 |
Rung 2:4
| Set to |Extend |Positions |Voltages |
| program |profile |stored |stored |
| profile |complete Retract Position Setpts.|
| |
| N7:40 N7:8 I:1.0 I:1.0 +COP–––––––––––––––+ |
|–––] [–––––––––] [–––––––]/[––––––––]/[––––––––––––––––––+COPY FILE +–|
| 0 0 13 14 |Source #N7:20| |
| |Dest #O:1.0| |
| |Length 8| |
| +––––––––––––––––––+ |
Publication
1746-6.18 April 1998
Page 30

Ladder ProgramB–2
Rung 2:5
| Set to |Extend |Run/store |Positions |Voltages |
| program |profile |retract |stored |stored |
| profile |complete Retract Velocity Setpts.|
| |
| N7:40 N7:8 I:1.0 I:1.0 I:1.0 +COP––––––––––––+ |
|–––] [–––––––––] [–––––––] [––––––––] [––––––]/[––––––––––––+COPY FILE +–|
| 0 0 12 13 14 |Source #N7:30| |
| |Dest #O:1.0| |
| |Length 8| |
| +–––––––––––––––+ |
Rung 2:6
| Set to |Extend |Run/store |Positions |Voltages Retract |
| program |profile |retract |stored |stored profile |
| profile |complete complete |
| |
| N7:40 N7:8 I:1.0 I:1.0 I:1.0 N7:8 |
|–––] [–––––––––] [–––––––] [––––––––]/[––––––] [––––––––––––––––+––––(L)––––+–|
| 0 0 12 13 14 | 1 | |
| | Program | |
| | retract | |
| | voltages | |
| | O:1.0 | |
| +––––(U)––––+ |
| 8 |
Rung 2:7
| Set to |Extend |Retract Loading |
| program |profile |profile profiles |
| profile |complete |complete complete |
| |
| N7:40 N7:8 N7:8 N7:40 |
|–––] [–––––––––] [–––––––] [––––––––––––––––––––––––––––––––––––+––––(U)––––+–|
| 0 0 1 | 0 | |
| | Extend | |
| | Profile | |
| | Complete | |
| | N7:8 | |
| +––––(U)––––+ |
| | 0 | |
| | Retract | |
| | Profile | |
| | Complete | |
| | N7:8 | |
| +––––(U)––––+ |
Rung 2:8 1
| Set to |
| program |
| profile |
| |
| N7:40 +COP–––––––––––––––+ |
|–––]/[–––––––––––––––––––––––––––––––––––––––––––––––+–+COPY FILE +–+–|
| 0 | |Source #I:1.0| | |
| | |Dest #N7:60| | |
| | |Length 8| | |
| | +––––––––––––––––––+ | |
| | | |
| | +MOV–––––––––––––––+ | |
| +–+MOVE FILE +–+ |
| |Source N7:50 | |
| | 0 | |
| |Dest O:1.0 | |
| | 0 | |
| +––––––––––––––––––+ |
Rung 2:9
|–––––––––––––––––––––––––––––––––––+END+––––––––––––––––––––––––––––––––––––––+
Extend Positions
Extend V
oltages
Retract Positions
Retract V
oltages
G-file for Module
Configuration
Publication
1746-6.18 April 1998
Address Data
(radix = DECIMAL)
#N7:0 32 –45 50 200 300 400 425 500 0 0
#N7:10 64 3000 3750 4000 4000 4000 4000 4000 0 0
#N7:20 128 –45 50 200 300 400 425 500 0 0
#N7:30 256 5000 6000 6000 3000 1000 50 25 0 0
G1:0 2056 890 640 12 1200
SLC Code for
QV Module
LDT
Calibration
Length Counts
–32,768 0
Config W
ord 5
bit 15=1
(position increases
toward LDT head)
Preset
Reference
Page 31

Input Image Table
SLC Processor Files
You use the following files when programming the SLC processor
for an application with the 1746-QV module:
• input image table to indicate status
• G file to configure the module for its LDT
• output image table for commands and loading profiles
Word 0 (I:e.0 or N7:60 in the ladder program) reports status such as
hardware faults, your data-entry errors, and acknowledgement of
profile data stored in the module. Word 1 reports position data.
Words 2-7 report speeds of the previous profile.
Word #: Bit #: Description: (for error & fault bits 0-8, status of 0 = OK, status of 1 = fault.)
0
1 n/a Position data
2-7 n/a Speed segments 1-6, respectively
0 The module sets this LDT error bit when it detects a:
– broken or mis-wired LDT cable
– faulty LDT
– incompatible LDT type (DPM or RPM)
– missing LDT magnet
– loss of "15V dc PS
1 Module fault, such as EEPROM error. May turn outputs OFF (fault dependent)
2 The module sets this bit when it detects any of the following invalid command bits or bit
combinations in output image table word 0 (O:e.0):
– one or more of the reserved bits 9-15 were set
– bit 5 or 7 (position) was set concurrently with bit 6 or 8 (voltage)
– output enable bit 0 (extend) or 1 (retract) was set before loading valid profiles
– both output enable bits 0 (extend) and 1 (retract) were set concurrently
– started to run a profile after the module had flagged an LDT error (I:e.0/0)
3 You set one or more of the reserved bits 0-13 in G-file word 5 (Ge:5).
4 You entered an invalid length (word 3) or count (word 4) in the G file.
5 You entered an invalid LDT calibration (words 1 and/or 2) in the G file.
6 You entered a position setpoint outside the range of –32,768 to +32,767 in O:e.1-O:e.7.
7 You entered a voltage value outside the range of "10,000mV in O:e.1-O:e.7.
8 Loss of sensor. The module detected position data (in I:e.1) greater than the LDT
length plus the preset reference. Clear this bit by running a profile.
9-11 Reserved. Do NOT use.
12 The module sets this bit after it stores the retract position setpoints or voltage values, or
when the retract profile is active. It remains set until another operation is performed.
13 The module sets this bit after it stores your position setpoints.
It resets it after you reset the “program position” bit (O:e.0/5 or O:e.0/7)
14 The module sets this bit after it stores your voltage values.
It resets it after you reset the “program voltage” bit (O:e.0/6 or O:e.0/8)
15 The module sets this bit when it detects the profile is active (output is applied).
.
The module computes the speed of each segment and reports them in the subsequent
profile (reports extend speeds during the next retract profile, etc.)
Publication
1746-6.18 April 1998
Page 32

SLC Processor FilesC–2
For e a ple o enter an calibration of 8.9373
1 0 0 0
–32,768
0 1 1
+24,576
increa e
towards
0 1 1
+24,576
head
Co and Bit
Enable these bit
with your ladder logic.
G File
Use this file (Ge:0) to configure the module for use with the LDT.
Example values are those from the sample ladder logic (appendix B).
Word: Function of G-file Word: Range: Description of G-file Word or Bit: Example:
0 Reserved. Do NOT use. n/a The processor stores a code for the 1746-QV module. 2056
words 1 & 2 refer to the gradient or transducer calibration value stamped on the name plate on the transducer housing.
1 LDT calibration: upper 3 digits
2 LDT calibration: lower 3 digits
800-999 ms/inch
000-999 ms/inch
For example: To enter an LDT calibration of 8.9373,
use decimal radix and enter 893 in word 1 and 730 in word 2.
3 Full-scale length (L) of LDT 2vLv160 inch Enter the length of the LDT (160 inches max). 12
4 Full-scale count (C) 2vCvLx100 Typically C = L x 100.
1200
Position Data (I:e.1) = C/(L x 100)
LDT Calibration
5 Configuration Bits
15 14 13 12-0 Equivalent V
0 1 0 0
1 0 0 0
1 1 0 0
0
0
+16,384
–32,768
–16,384
bits 0-12 Set to zero.
alue
bit 13 0 = output maintained during LDT fault or SLC mode change
1 = output resets for LDT fault or SLC mode change
bit 14 Type of LDT: 0 for RPM, 1 for DPM
–32,768
(bit
for position
increases
LDT head)
bit 15 0 = position data increases when moving away from LDT head
1 = position increases when moving toward LDT head
6 Preset Reference –32,768 to +32,767 Typically zero or home reference value. 32,767 = 327.67 inches. 0
Examples of Full-scale Count Values
893
730
15 = 1
Output Image Table
Word: Function of Output Image Word: Bit #: Description: (For command bits, a 0-to-1 transition enables the command)
0 Command Bits
1-7 Position 1-7 Setpoint or Voltage
(i.e. word 2 = position 2, etc.)
LDT Physical
Length
No. of
Recirculations
Resolution
Full-scale
Length (L)
Full-scale
Counts (C)
from 160” to 2” 1 0.01 L (160” to 2”) L x 100
16” 2 0.01 160 8000
16” 4 0.01 160 4000
16” 10 0.001 160 16000
The ladder program loads commands and profile data into the
module through the output image table, O:e.0–O:e.7.
0 Set to run an extend profile.
s
1 Set to run a retract profile.
2 Set to disable the profile. This bit over-rides bit 0 or 1.
3 Set to change current position data to the value of preset reference in Ge:6.
4 Set to clear any data-entry errors.
5 Set to define words 1-7 as programmed position setpoints for extend.
6 Set to define words 1-7 as programmed voltage values for extend.
7 Set to define words 1-7 as programmed position setpoints for retract.
8 Set to define words 1-7 as programmed voltage values for retract.
9-15 Reserved. Do NOT use.
n/a Important:
Enter position setpoints in units of 0.01” (200 = 2.00”) within the range of
–327.68 to +327.67”, and voltage values in 5mV units (3005 = 3.005V)
within the range of "10,000mV.
Publication
1746-6.18 April 1998
Page 33

A
access
to BBS or Internet, 3-1, 3-2
applications of module, 1-2
B
BBS, Rockwell Software Bulletin Board, 3-1
benefits, of module, 1-2
bits
command, 3-4, C-2
G-file configuration, 3-3, B-2, C-2
status, 5-4, C-1
C
cables, 4-3
calibration (value) of LDT, 3-3, B-2, C-2
configure
G file, 3-3, B-2, C-2
motion profiles, 1-2, 3-4
SLC processor
connections,
inputs to module, 4-1
outputs from module, 4-2
count, full-scale, 3-3
, 3-2
I, J, K
ID
of module, 3-2, A-1
input terminal block, of module, 4-1, 5-1
input image table (status), 5-4, C-1
Internet, access to, 3-2
L,M
ladder program, B-1
LDT
calibration value, 3-3
configuration in G file, 3-3
connections to, 4-1
fault, 5-2, 5-4
length of, 3-3
movement of, 3-5
types of, 4-1
LEDs, 5-2, A-1
N
N file, 3-4, 5-2, B-1
noise, electrical, 4-2
O
D
data direction (bit), 3-3, 3-5, 5-3, C-2
data, profile, 3-4, 3-5, B-2, C-2
download, from BBS, 3-1
E
error
, see fault
extend profile, 1-2, 3-4, 5-2, C-2
F
fault, module and LDT
, 5-2, 5-4, C-1
G,H
G file, 3-2, 3-3, 3-5, 3-6, 5-3, B-2, C-2
grounding, 4-2, 4-3, 5-1
output
conditions, 5-5
connections, of module, 4-2, 5-1
image table, 3-4, C-2
terminal block, 4-2
status, 5-4
overview of module and system, 1-1
P
position data, 3-4, 3-5, 5-3, C-1
position setpoints, 3-4, 3-5, 5-2, 5-3, C-2
power supply, considerations, 4-3
preset reference, 3-3, 5-3
profile, 1-2, 3-3, B-1, C-2
conventions, 3-5
operation of, 3-5
Page 34

I–2
Q
quick
start, 2-1
R
ram, hydraulic, 1-1, 1-2
procedure to move, 5-2, 5-3
set reference position of, 5-3
reference, preset, 3-3, 5-3
retract profile, 1-2, 3-4, 5-3
reverse motion, 5-2
S
segments, speed, 1-2, 3-4, 3-5
(also see voltage values)
shielding, of cables, 4-2, 4-3, 5-1
specifications, of module, A-1
status (input image table) 5-4, C-1
of outputs, 5-4
system, power up, 5-1
T, U, V
testing,
for proper system operation, 5-4
travel, length of LDT
troubleshooting, with
LEDs, 5-2
module status bits, 5-4
output conditions, 5-5
troubleshooting table, 5-5
voltage values, 3-4, 3-5, 5-2, C-2
W, X, Y
wiring,
system, 4-1, 4-2, 5-1
, 1-2, 3-3
, Z
Publication
1746-6.18 April 1998
Page 35
Worldwide representation.
Allen-Bradley, a Rockwell Automation Business, has been helping its customers improve
productivity and quality for more than 90 years. We design, manufacture and support a broad
range of automation products worldwide. They include logic processors, power and motion
control devices, operator interfaces, sensors and a variety of software. Rockwell is one of the
world’s leading technology companies.
Argentina •
Denmark • Ecuador • Egypt • El Salvador
Ireland
Philippines •
Sweden
Australia • Austria • Bahrain • Belgium
• Israel • Italy • Jamaica •
Poland • Portugal • Puerto Rico • Qatar • Romania • Russia–CIS • Saudi Arabia • Singapore
• Switzerland • T
Japan • Jordan • Korea • Kuwait • Lebanon
aiwan
• Thailand • T
• Brazil •
• Finland •
urkey • United Arab Emirates • United Kingdom • United States • Uruguay • V
Bulgaria • Canada • Chile • China, PRC • Colombia • Costa Rica • Croatia • Cyprus • Czech Republic
France • Germany • Greece • Guatemala • Honduras • Hong Kong • Hungary • Iceland • India • Indonesia •
• Malaysia • Mexico •
Netherlands
• New
• Slovakia • Slovenia •
Zealand • Norway
South Africa, Republic • Spain
enezuela • Y
ugoslavia
Allen-Bradley Headquarters, 1201 South Second Street, Milwaukee, WI 53204 USA, Tel: (1) 414 382-2000 Fax: (1) 414 382-4444
Publication
Supercedes
1746-6.18 April 1998
Publication 1746-6.18 – February 1998
Copyright 1998 Allen-Bradley Company
• Pakistan •
•
Peru
•
•
PN955132-83
, Inc. Printed in USA
 Loading...
Loading...